scanning raman lidar error characteristics and calibration for ihop david n. whiteman/nasa-gsfc,...
TRANSCRIPT

Scanning Raman Lidar Error Scanning Raman Lidar Error Characteristics and Calibration For IHOPCharacteristics and Calibration For IHOP
David N. Whiteman/NASA-GSFC, Belay Demoz/UMBC
Paolo Di Girolamo/Univ. of Basilicata, Igor Veselovskii/General Physics Institute,
Keith Evans/UMBC, Zhien Wang/UMBC, Ruei-Fong Lin/UMBC, Joe Comer/SSAI,
Gerry McIntire/Raytheon
Acknowledgement: Interdisciplinary Research, Jim Dodge, NASA/HQ

OutlineOutline
SRL random error characterization– May 22 dryline case
Examples Water Vapor Lidar Calibration
– Temperature dependent lidar equations Aerosol scattering ratio Water vapor mixing ratio
Raman Lidar water vapor calibration– Aqua validation (Sept – Nov, 2002)– IHOP (May – June, 2002)

Scanning Raman LidarScanning Raman Lidar Telescopes: 0.76 and 0.25 m Nd:YAG (9W @ 355 nm) Windows 12 channel AD/PC IHOP Accomplishments
– >200 hours – Factor of 10 increase in water vapor
signal 0.25 nm filter, 0.25 mrad fov
– 36 hour measurement period Toward an automated, eye-safe
configuration– Aerosol depolarization
Cirrus cloud studies – RR Temperature (DiGirolamo et. al.)
Demonstration of eye-safe concept– Liquid water
Cloud droplet retrieval studies

Water Vapor Mixing Ratio PrecisionWater Vapor Mixing Ratio Precision
(Dryline May 22, 2002)(Dryline May 22, 2002)
• Full Resolution (1 minute, 30 meters)• Less than 10% to beyond 2 km.
• As Distributed (2 min, 60-210 meters)• day <10% in BL• night <2% in BL, <10% to 6km
Measurement improvements
permit convective
processes to be studied
throughout the diurnal cycle
NightDay

ExampleExampleJune 3-4 June 3-4
The full dataset
DayNight Night
The June 4 bore

June 19-20 BoreJune 19-20 Bore
Evidence of wave action in several locationsDay Night

Oscillations in the lower cirrus layerOscillations in the lower cirrus layer

Temperature Dependent Lidar EquationsTemperature Dependent Lidar Equations

Aerosol Scattering Ratio EquationsAerosol Scattering Ratio Equations

Water Vapor Mixing Ratio EquationsWater Vapor Mixing Ratio Equations
<0.1% error with calibration lamp
10% uncertainty (1976)!!=1.0 in far fieldRatio of MWs
and N2 fraction
<1% error in ratio Ratio of lidar signals
Differential transmission1-2% uncertainty for moderate aerosol loading
A first principles Raman water vapor lidar calibration is straightforward and can be done with
high accuracy except for the knowledge of the Raman cross sections.
Analysis of CARL data indicates standard error of
0.04% over more than 1 year!
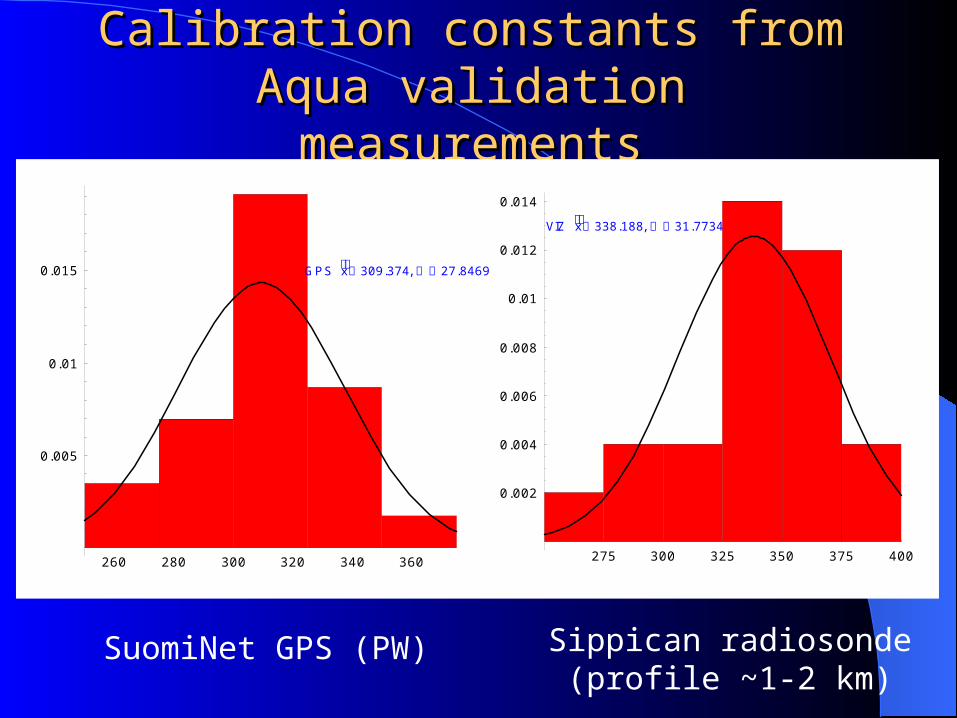
Calibration constants from Aqua Calibration constants from Aqua validation measurementsvalidation measurements
260 280 300 320 340 360
0.005
0.01
0.015 GPS x 309.374, 27.8469
275 300 325 350 375 400
0.002
0.004
0.006
0.008
0.01
0.012
0.014
VIZ x 338.188, 31.7734
SuomiNet GPS (PW) Sippican radiosonde(profile ~1-2 km)

• Comparison of AIRS observations and Fast Model calculations (February, 2003)• SRL water vapor + sonde T, P (GSFC)• RS-90s at the ARM SGP site
• Implication is a wet bias of the lidar of 5-15% with respect to RS-90s (rule of thumb 1K ~ 12% RH in UT)
• Previous work would have implied a 3-4% dry bias instead…
(data courtesy L. Strow, S. Hannon)

IHOP Specific CalibrationIHOP Specific Calibration(Nighttime comparisons only)(Nighttime comparisons only)
Use of the Aqua-validation-derived SRL calibration constant during IHOP yields results ~4% wet of nighttime GPS measurements from IHOP.Is there a meteorologically dependent bias in the SuomiNet retrievals?

SummarySummary Water vapor random error less than 10% throughout
the boundary layer during the daytime– <2% less at night
Raman water vapor lidar could be calibrated with high accuracy from first principles– Raman cross sections limit – State of the art measurement of cross sections could permit
calibration with absolute accuracy of 5-7% Implementing calibration of aerosol and water vapor
data that accounts for temperature dependence of Raman spectra
Current analysis indicates an IHOP specific calibration constant ~4% dry of that used for the preliminary data release