satellite detection algorithms developed forcradpdf.drdc-rddc.gc.ca/pdfs/unc108/p534603_a1b.pdf ·...
TRANSCRIPT

Satellite detection algorithmsSatellite detection algorithmsSatellite detection algorithmsSatellite detection algorithmsdeveloped for developed for
SofS applicationsSofS applicationsWarning:
This presentation contains several animations that cannot
Martin P. LévesqueRDDC Valcartier
P d
be executed with the PDF format.
Some slide may look like confused because of this Presented to:
NATO SET147- Microsatellites and Surveillance of SpaceJuly 15th 2010
confused because of this.
Defence Research andDevelopment Canada
Recherche et développementpour la défense Canada Canada

PLAN
- SofS context- Acquisition modesAcquisition modes- Processing in SSM- Processing in TRM
-ProcessingIt ti b k d l l ith- Iterative background removal algorithm
- Star detection- Streak detection- Streak detection- Iterative matched filter- Alarm extraction and false alarm rejection
Defence R&D Canada • R & D pour la défense Canada
j

MOLNIYA(40000km)(40000km)
GPS(5000km)
LEO(800km)
GEO(36000km)
Defence R&D Canada • R & D pour la défense Canada
( )
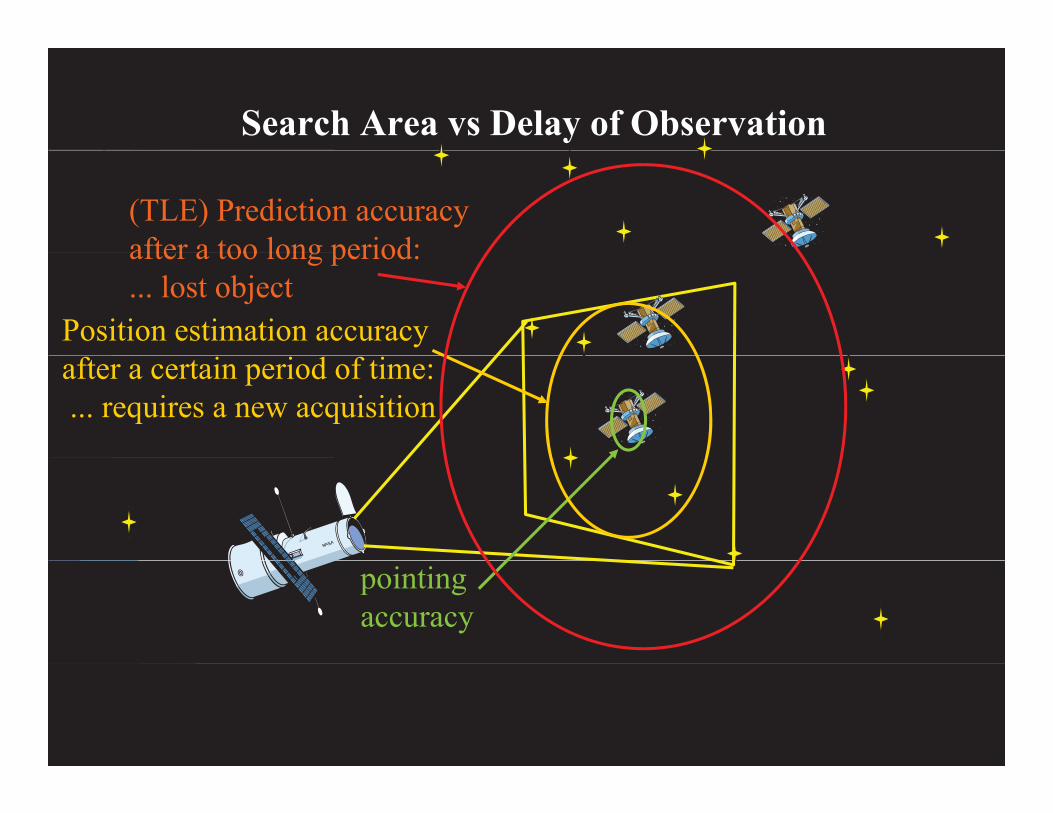
Search Area vs Delay of Observation
(TLE) Prediction accuracy after a too long period:
Position estimation accuracy
after a too long period:... lost object
after a certain period of time:... requires a new acquisition
pointingaccuracy
Defence R&D Canada • R & D pour la défense Canada

TLED t bDatabase
Extractedobsolete TLE
Update:detectedsatellites
Observation cycle Observationplanning and
tasking
Data reduction(image
processing)
satellites
gp g)
Observationschedule
Astronomicalimage
Observation
Defence R&D Canada • R & D pour la défense Canada

Acquisition modes
• SSM: Sidereal stare mode
• TRM: Track rate mode
• TRM sequence: multiple TRM
– Perfect tracking
– With tracking error
Defence R&D Canada • R & D pour la défense Canada

Acquisition in SSM : (Sidereal Stare Mode)
Pointing
Sidereal motion
Sidereal trackingSidereal tracking
Expected satellite
Acquisition
DownloadDownload
Data analysis
Defence R&D Canada • R & D pour la défense CanadaDefence R&D Canada R & D pour la défense Canada

Acquisition in TRM : (Track rate Mode)
Sidereal tracking
Set track rate
Expected satellite
Acquisition
Download
Data analysis
Star detectionStar detection
Satellite detection
Defence R&D Canada • R & D pour la défense CanadaDefence R&D Canada R & D pour la défense Canada

Acquisition of a TRM sequence
Case 1:Perfect tracking
Set track rate
Perfect tracking
1Acquisition123
Image summation
VetoVe o(logical and)
Defence R&D Canada • R & D pour la défense Canada

Acquisition of a TRM sequence
Case 2:With tracking
Set track rate
error
1Acquisition123
Image summation
Defence R&D Canada • R & D pour la défense Canada

Processing of images acquired in SSMBad pixel correction
Noise estimation
Background estimation and removal
Star detection (but not streak)
Star removal
Streak detection(matched filter)(matched filter)
Alarm extraction
Defence R&D Canada • R & D pour la défense Canada
False alarm rejection

Background estimation and removal
Bad pixel correction
Noise estimation
Background estimation and removal
Star detection
BackgroundOriginal image
Method 1: iterative polynomial fit(but not streak)
Star removal
Streak detection(matched filter)
Alarm extraction
False alarm rejection
Image - backgroundProfile of an horizontal line
starsbackgroundg+ noise
Defence R&D Canada • R & D pour la défense Canada

Background estimation and removal
Bad pixel correction
Noise estimation
Background estimation and removal
Star detection
Original imageI
Method 2: iterative local means estimation and clipping(but not streak)
Star removal
Streak detection(matched filter)
Alarm extraction
Calculation of the local mean
Firstiteration
Noiseestimation
n 8400
8500 original star profile (PSF)
fi t (15 15)
first clipping
False alarm rejection
Image clipping
Iterations2 to 5
n : noise standard deviation Estimated background
(Smoothed image)
<Bi>
n
8200
8300
8400 first mean (15x15)
second mean (15x15)after first clip
third mean (15x15)
second clipping
clipping
Clipped imageIbi
8000
8100
( )
fourth mean (15x15)fifth mean (35x35)
375 380 385 390 395 400 405 410
7800
7900
final background = minimum fourth and fifth means
Defence R&D Canada • R & D pour la défense Canada

Background estimation
Bad pixel correction
Noise estimation
Background estimation and removal
Star detection
Method 2: iterative local means estimation and clipping (but not streak)
Star removal
Streak detection(matched filter)
Alarm extraction
Original image First meanFirst clipping Second mean... after five clipping False alarm rejection
Defence R&D Canada • R & D pour la défense Canada
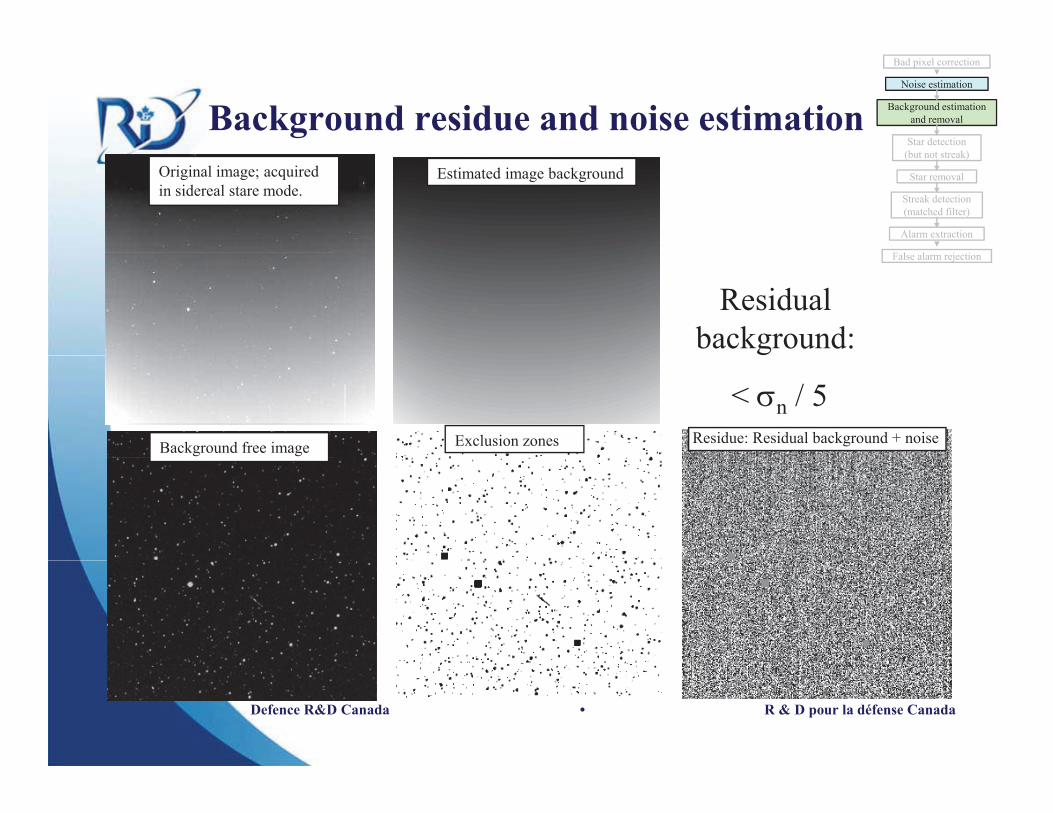
Background residue and noise estimation
Bad pixel correction
Noise estimation
Background estimation and removal
Star detection
Original image; acquiredin sidereal stare mode.
Estimated image background(but not streak)
Star removal
Streak detection(matched filter)
Alarm extraction
F l l j i
Residualbackground:
False alarm rejection
Residue: Residual background + noiseBackground free image Exclusion zones
< n / 5
Defence R&D Canada • R & D pour la défense Canada
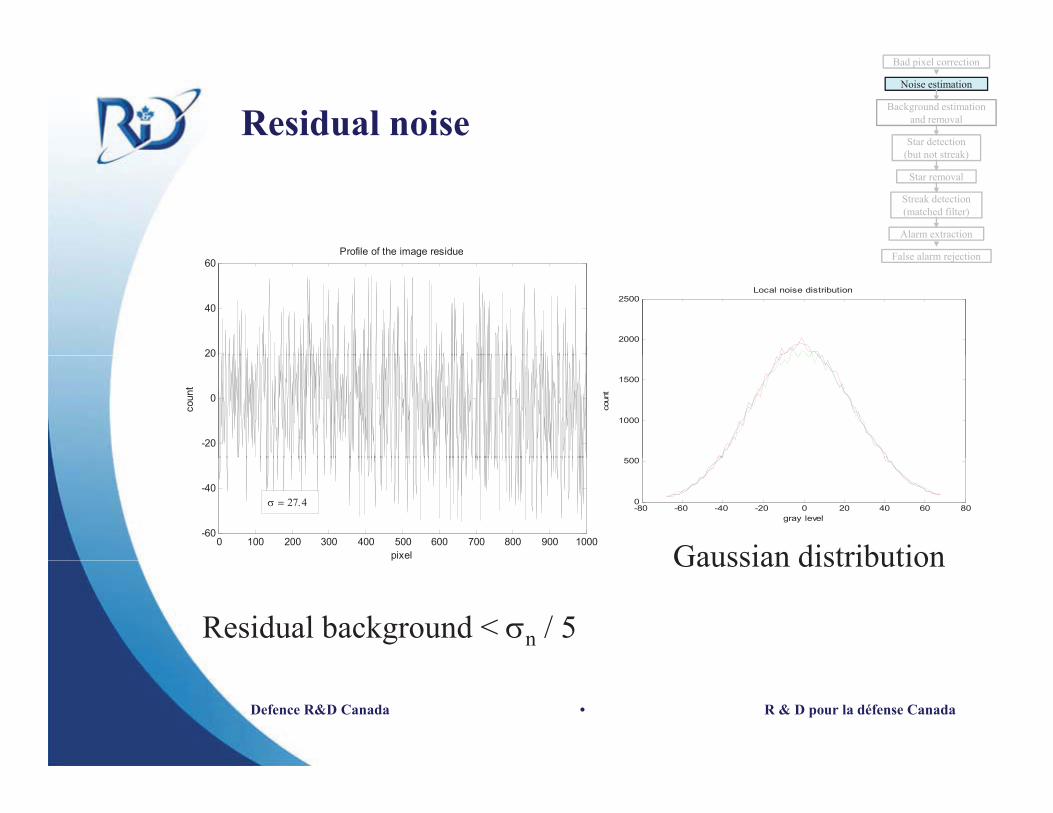
Residual noise
Bad pixel correction
Noise estimation
Background estimation and removal
Star detection
Profile of the image residue
(but not streak)
Star removal
Streak detection(matched filter)
Alarm extraction
F l l j i
20
40
60Profile of the image residue
2000
2500Local noise distribution
False alarm rejection
-20
0
20
coun
t
500
1000
1500
coun
t
0 100 200 300 400 500 600 700 800 900 1000-60
-40
pixel
-80 -60 -40 -20 0 20 40 60 800
500
gray level
Gaussian distributionp
Residual background < n / 5
Gaussian distribution
Defence R&D Canada • R & D pour la défense Canada

Star detection … but not the streak
Bad pixel correction
Noise estimation
Background estimation and removal
Star detection
- Star detection and removingBackground-free image Detected stars
(but not streak)
Star removal
Streak detection(matched filter)
Alarm extraction
F l l j iFalse alarm rejection
S t d d bl t filt f Remaining objects
1 2 3 4
In(7x7)
out
Segmented double gate filter for star detection ... but not streak
6
512
11
In(7x7)
In(3x3)
Defence R&D Canada • R & D pour la défense Canada
8 710 9

Star removal
Bad pixel correction
Noise estimation
Background estimation and removal
Star detection
Zeroing intensity above threshold ...... inappropriate,
(but not streak)
Star removal
Streak detection(matched filter)
Alarm extraction
create artefacts. False alarm rejection
Central disk set to zeroZone of subtracted profileUnaffected faint star
A B C
MedianMeanStandard deviation
S l i h fil
0 2 4 6 8 10 12024681012
Solution: measure the star profiles
... and subtract it
Defence R&D Canada • R & D pour la défense Canada

Streak detection
Bad pixel correction
Noise estimation
Background estimation and removal
Star detection
Remaining objects 1st convolution
(but not streak)
Star removal
Streak detection(matched filter)
Alarm extraction
False alarm rejection
Matched filtre
Solution: iterative matched filter
Several false alarms
l
Defence R&D Canada • R & D pour la défense Canada

Matched filter for streak detection
Bad pixel correction
Noise estimation
Background estimation and removal
Star detection
Star profile bStreak profilea
(but not streak)
Star removal
Streak detection(matched filter)
Alarm extraction
Convolvedn/2-n/2
C l dn/2-n/2
False alarm rejection
Convolvedby
1/nRectangle function
1/n
Convolvedby
n/2-n/2n/2-n/2
Almost a rectangle function
2b/n
Triangle functiona
Defence R&D Canada • R & D pour la défense Canadan-n
n-n
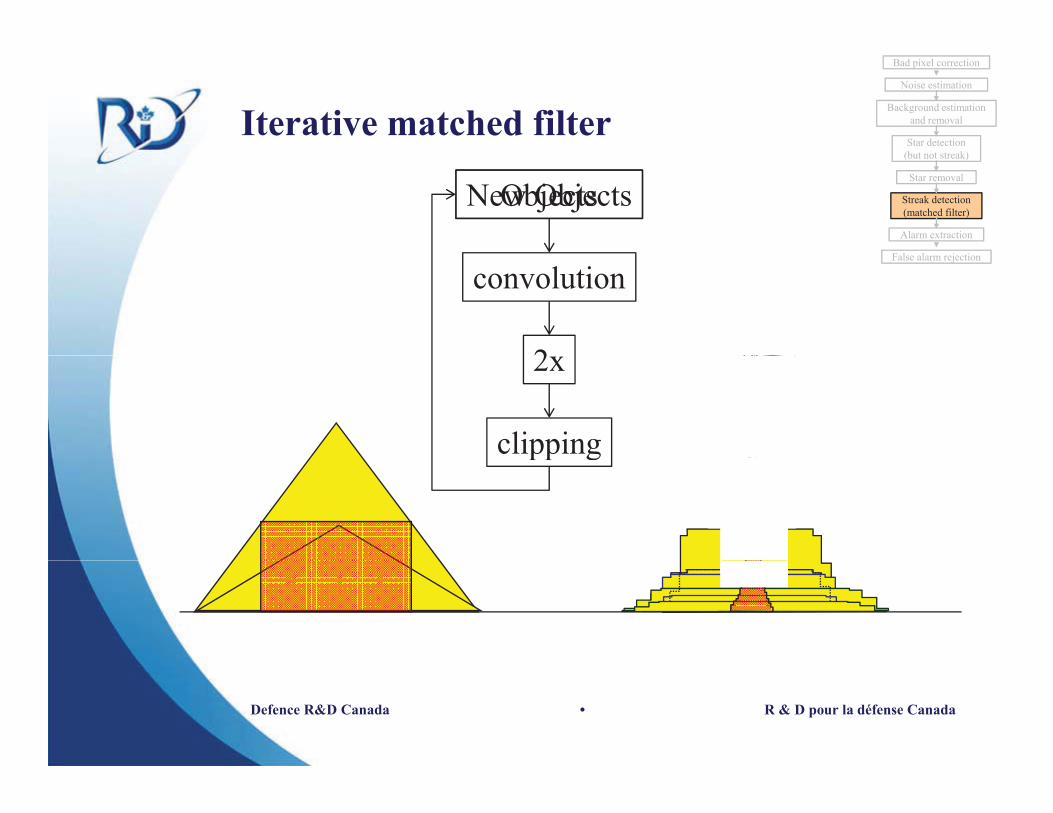
Iterative matched filter
Bad pixel correction
Noise estimation
Background estimation and removal
Star detection
Objects(but not streak)
Star removal
Streak detection(matched filter)
Alarm extraction
New Objects
False alarm rejection
convolution
22x
clippingpp g
Defence R&D Canada • R & D pour la défense Canada

Iterative matched filtert l i
Bad pixel correction
Noise estimation
Background estimation and removal
Star detection
Single stars detected and removed:
Matched filter 1st convolution
3rdeconvolution
(but not streak)
Star removal
Streak detection(matched filter)
Alarm extraction
Remaining objects l False alarm rejection
iterations
Detected streak
Defence R&D Canada • R & D pour la défense Canada

Alarm extraction
Bad pixel correction
Noise estimation
Background estimation and removal
Star detection (but not streak)
Star removal
Streak detection(matched filter)
Alarm extraction
A: Streak with remainingstars (boosted contrast)
B: Convolution peaks (after several iterations)
D: Binary masks generatedwith the clipped peaks
False alarm rejection
56
7
81
23
5
4 9
Noise still present Noise severely attenuatedin convolved image
Segmentation and labelling
Defence R&D Canada • R & D pour la défense Canada

Examples of extracted alarms
Bad pixel correction
Noise estimation
Background estimation and removal
Star detection
A pair of stars
(but not streak)
Star removal
Streak detection(matched filter)
Alarm extraction
A pair of stars False alarm rejection
The streak
A false alarm cause by a noise pattern
Defence R&D Canada • R & D pour la défense Canada

Bad pixel correction
Noise estimation
Background estimation and removal
Star detection
Alarm rejection parameters(but not streak)
Star removal
Streak detection(matched filter)
Alarm extraction
Moment ratio >10False alarm rejection
Length ratio > 1
<ISNR> (estimation of the local SNR)<ISNR> (estimation of the local SNR)> 0.5 for long streak> 1.0 for short streak
Defence R&D Canada • R & D pour la défense Canada

Moment ratio criteria
Bad pixel correction
Noise estimation
Background estimation and removal
Star detection
pMyypMxx
(but not streak)
Star removal
Streak detection(matched filter)
Alarm extraction
pMxx
pM
False alarm rejection
Myy
pMyy / pMxx >> 100 for a streak (typically) pMyy / pMxx 1 for a starpMyy / pMxx < 10 for a pair of starsp yy p f p f
Valid alarm: pMyy / pMxx >> 10
Defence R&D Canada • R & D pour la défense Canada

Length ratio criteria
Bad pixel correction
Noise estimation
Background estimation and removal
Star detection
Ratio between the length of the length of the detection peak and
Length ratio = length of extraction mask (or convolution peak) > 1length of expected streak
(but not streak)
Star removal
Streak detection(matched filter)
Alarm extractionRatio between the length of the length of the detection peak and
the length of the expected streak (129 pixels)
3
3,5
False alarm rejection
1 5
2
2,5
engt
h ra
tio
L
Mask length Streak length
0,5
1
1,5Le
Lm
sL
00 5 10 15 20 25 30 35
ISNR
Defence R&D Canada • R & D pour la défense Canada
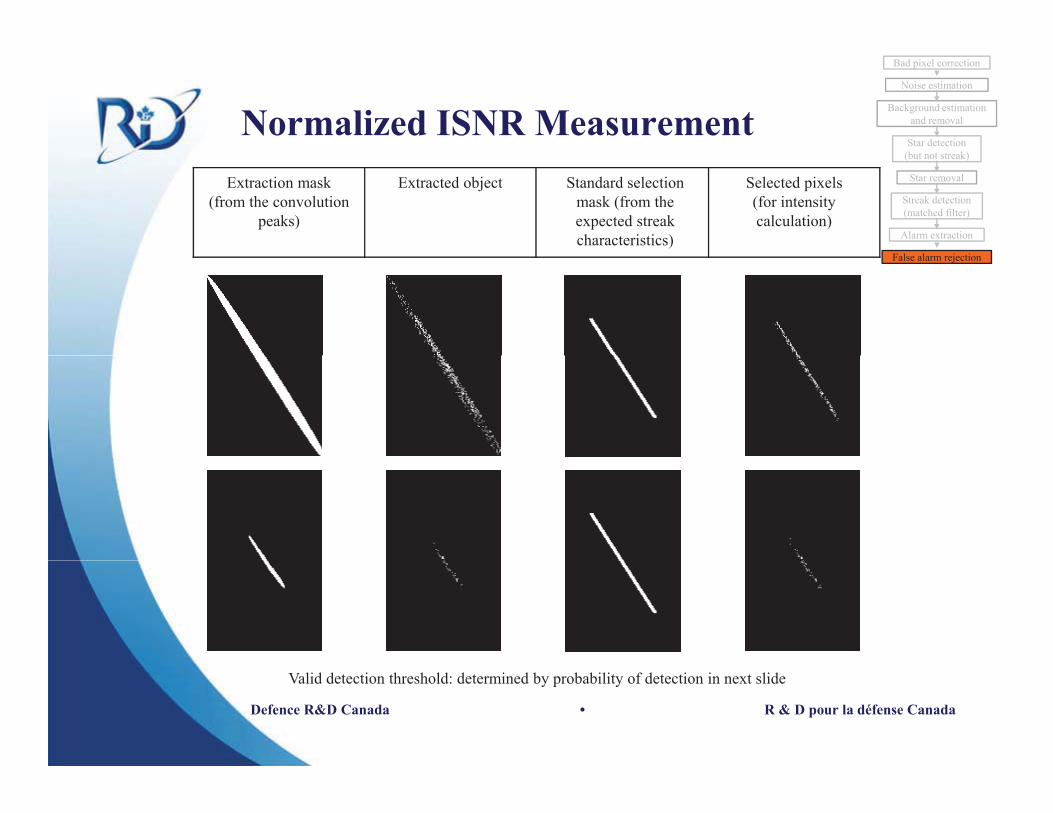
Normalized ISNR Measurement
Bad pixel correction
Noise estimation
Background estimation and removal
Star detection
Extraction mask(from the convolution
peaks)
Extracted object Standard selection mask (from the expected streak characteristics)
Selected pixels (for intensity calculation)
(but not streak)
Star removal
Streak detection(matched filter)
Alarm extraction
False alarm rejection
Defence R&D Canada • R & D pour la défense Canada
Valid detection threshold: determined by probability of detection in next slide

Performance evaluation
Bad pixel correction
Noise estimation
Background estimation and removal
Star detection (but not streak)
Star removal
Streak detection(matched filter)
Alarm extraction- The matched filter has very good performances- Consequence: Detection thresholds are set to lower value False alarm rejectionConsequence: Detection thresholds are set to lower value
and new false alarms are generated. - False alarm rejection performs very well, so:
what are the ultimate threshold detection limits?
• Calibrated synthetic image for detection testing
streak + PSF + photon noise
+ sensor noise
Defence R&D Canada • R & D pour la défense Canada

Simulated image with streak and pairs of stars
Bad pixel correction
Noise estimation
Background estimation and removal
Star detection pairs of stars (but not streak)
Star removal
Streak detection(matched filter)
Alarm extraction
False alarm rejection
Pairs of stars represent th t bthe worst case becausethey are not eliminatedby star detection and removal process.
Two stars with the streakTwo stars with the streakalignment are like a short streak.
Defence R&D Canada • R & D pour la défense Canada

Probability of detection without false alarm (in presence of pairs of stars)
Bad pixel correction
Noise estimation
Background estimation and removal
Star detection false alarm (in presence of pairs of stars) (but not streak)
Star removal
Streak detection(matched filter)
Alarm extraction
0 7
0,8
0,9
1 False alarm rejection
0 4
0,5
0,6
0,7
babi
lity
of d
etec
tion
50 pixels78 pixels129 pixels
Streak length
0 1
0,2
0,3
0,4
Prob
0
0,1
0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1
ISNR
Defence R&D Canada • R & D pour la défense Canada

Detection probability without false alarm
Bad pixel correction
Noise estimation
Background estimation and removal
Star detection false alarm
ISNR = 2.0 ISNR = 0.5 ISNR = 0.2
(but not streak)
Star removal
Streak detection(matched filter)
Alarm extraction
False alarm rejection
100% 100% 50%
Raw probability of detection:The algorithms always detect the streak with ISNR > 0.1, but with false alarms
b bili f d iNet probability of detection:With ISNR > 0.5, always 100% of detection completely without false alarm.
Defence R&D Canada • R & D pour la défense Canada

Detection results
Bad pixel correction
Noise estimation
Background estimation and removal
Star detection
Detections and Alarms
(but not streak)
Star removal
Streak detection(matched filter)
Alarm extraction
-----------------------------------------------------------------------image report: 0144 Expected length (pixels): 68.2495Expected orientation (degrees): 51.0725
False alarm rejection
p ( g )Alarm <ISNR> Center of intensity Probability of FAindex (counts) (Line) (Sample) (percent)-----------------------------------------------------------------------CONFIRMED DETECTIONS:
7 1.398 649.5 567.7 0.00-----------------------------------------------------------------------POSSIBLE DETECTIONS:
6 0.270 858.8 401.0 1.005 0.261 924.9 301.8 1.00
-----------------------------------------------------------------------OTHER REJECTED ALARMS: 10 1.239 10.5 1001.6 1.001 0.437 34.4 7.8 1.0011 0.297 40.1 1014.5 1.003 0.281 986.0 223.4 1.002 0.190 944.1 77.8 1.008 0.167 912.3 963.7 1.004 0.120 928.9 251.5 1.009 0.102 1013.0 975.1 1.00
-----------------------------------------------------------------------
Defence R&D Canada • R & D pour la défense Canada
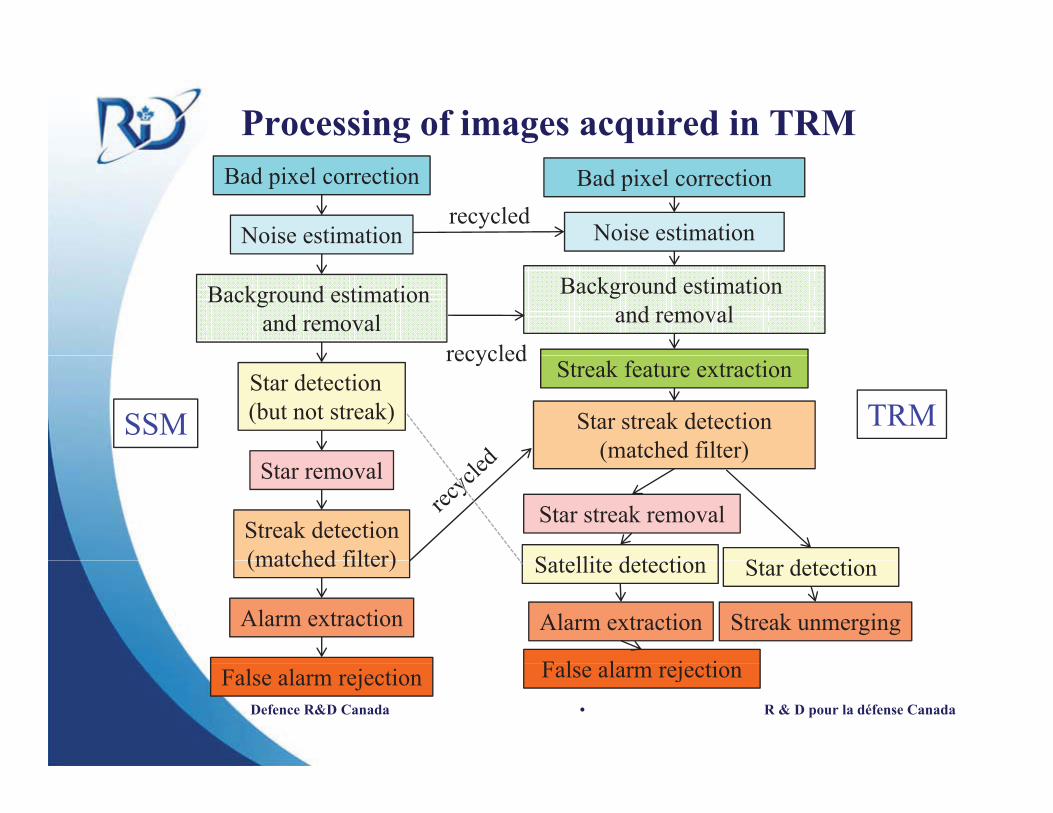
Processing of images acquired in TRMBad pixel correction
Noise estimation
Bad pixel correction
Noise estimationrecycled
Background estimation and removal
Background estimation and removal
recycledStar detection (but not streak)SSM TRMStar streak detection
(matched filter)
Streak feature extractionrecycled
Star removal
Streak detection(matched filter)
Star streak removal
( )
S t llit d t ti S d i(matched filter)
Alarm extraction Alarm extraction
F l l j ti
Satellite detection Star detection
Streak unmerging
Defence R&D Canada • R & D pour la défense Canada
False alarm rejection False alarm rejection

Automatic extraction of streak features:length and orientation
Bad pixel correction
Noise estimation
Background estimation and removal
Streak feature extractionlength and orientation
Fourier
Star streak removal
Star streak detection(matched filter)
Satellitedetection
Stardetection
Streakunmerging
transform
Radontransform
Profile at 145degrees
Alarm extraction
False alarm rejection
g g
145 degreesProfile at 145degrees
transform
degrees
M i
The zeros of the sin(x)/x functionindicate the length ‘l’ of the
Rect(x/l) function Maximumvalue
Rect(x/l) function,i.e. the streak length
Defence R&D Canada • R & D pour la défense Canada
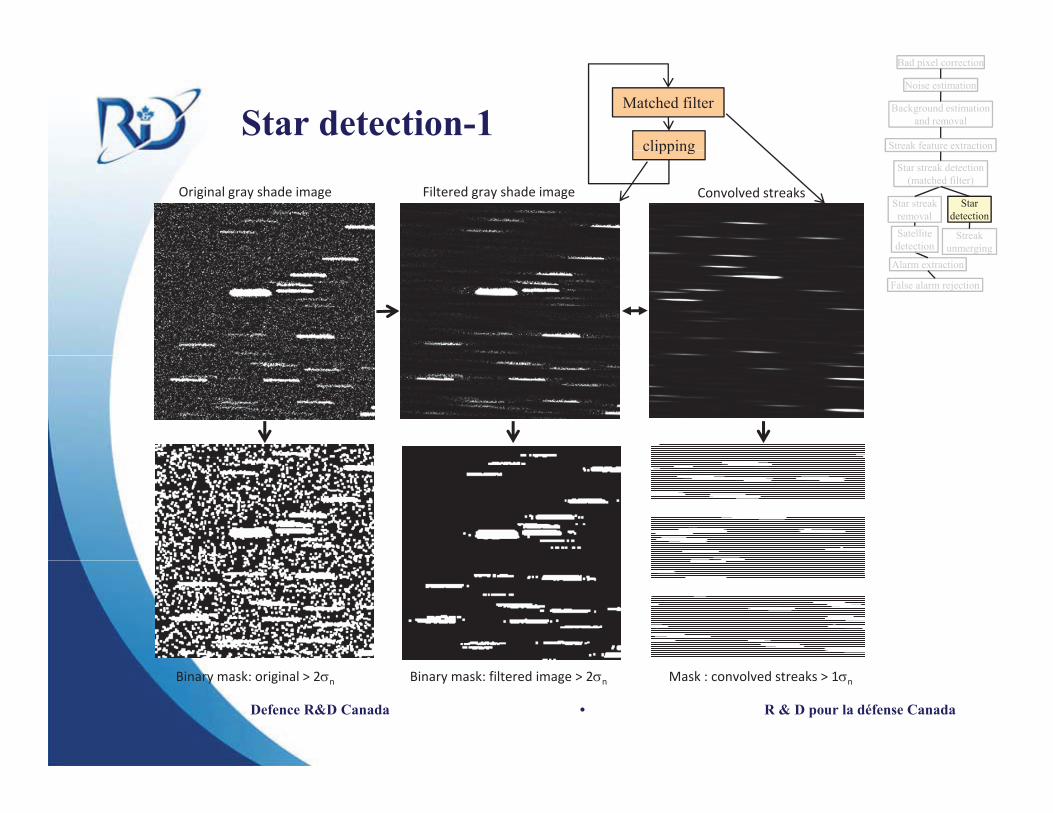
Star detection-1
Bad pixel correction
Noise estimation
Background estimation and removal
Streak feature extraction
Matched filter
clipping
Star streak removal
Star streak detection(matched filter)
Satellitedetection
Stardetection
Streakunmerging
Original gray shade image
clipping
Filtered gray shade image Convolved streaks
Alarm extraction
False alarm rejection
g g
Defence R&D Canada • R & D pour la défense Canada
Binary mask: original > 2 n Binary mask: filtered image > 2 n Mask : convolved streaks > 1 n

Star detection-2
Bad pixel correction
Noise estimation
Background estimation and removal
Streak feature extraction
Star streak removal
Star streak detection(matched filter)
Satellitedetection
Stardetection
Streakunmerging
Alarm extraction
False alarm rejection
g gBright star Faint star
Mean value Thresholdset at 1 n
centroid
Red line: streak profileBlue line: convolution peak profile
Defence R&D Canada • R & D pour la défense Canada

Star detection-3
Bad pixel correction
Noise estimation
Background estimation and removal
Streak feature extraction
Star streak removal
Star streak detection(matched filter)
Satellitedetection
Stardetection
Streakunmerging
Binary mask: filtered image > 2 n
Bright star removed New binary mask:convolution peak > n
Alarm extraction
False alarm rejection
g g
Matched filter
Detected bright starsl k
Defence R&D Canada • R & D pour la défense Canada
New convolution peaksDetected bright and faint stars

Star unmerging
Bad pixel correction
Noise estimation
Background estimation and removal
Streak feature extraction
Star streak removal
Star streak detection(matched filter)
Satellitedetection
Stardetection
Streakunmerging
Extraction maskExtracted objectsConvolution peaksAlarm extraction
False alarm rejection
g g
Modeled peakPeak subtractione sub c o
Geometric centerPeak maximum Peak subtraction
Case of merged stars detected
Second peak detected
Example of unmerging
Defence R&D Canada • R & D pour la défense Canada
p
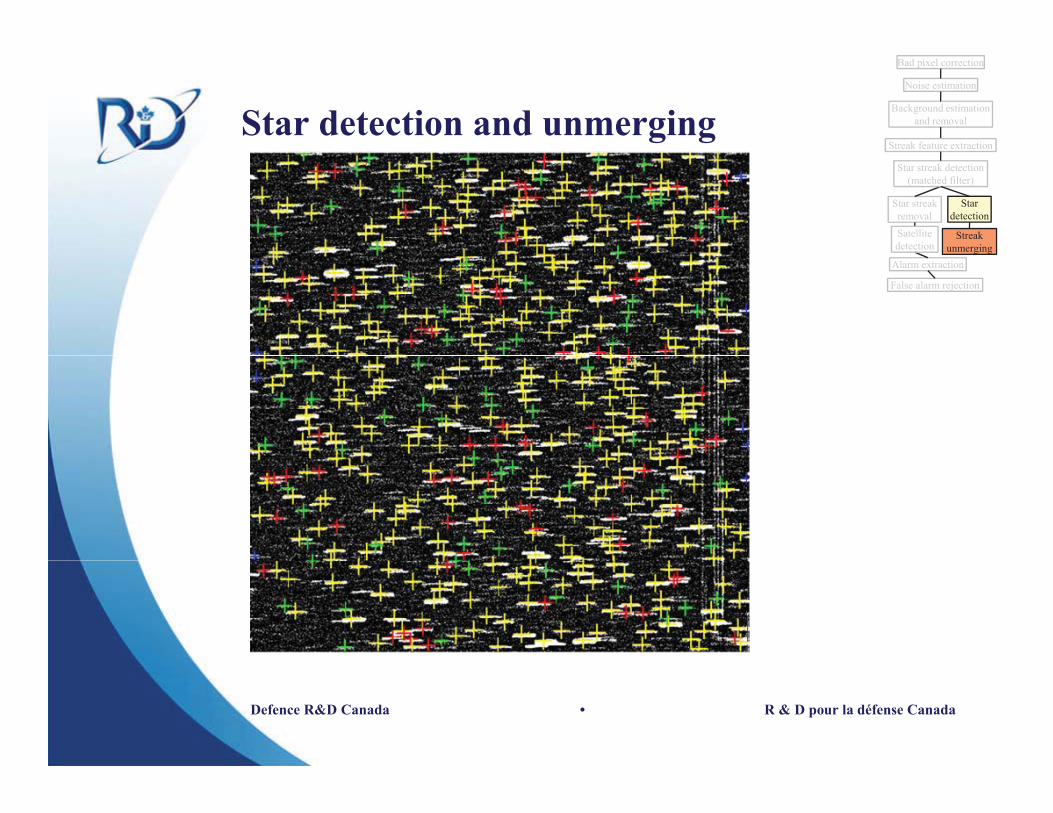
Star detection and unmerging
Bad pixel correction
Noise estimation
Background estimation and removal
Streak feature extraction
Star streak removal
Star streak detection(matched filter)
Satellitedetection
Stardetection
Streakunmerging
Alarm extraction
False alarm rejection
g g
Defence R&D Canada • R & D pour la défense Canada

Star removal and satellite detection
Bad pixel correction
Noise estimation
Background estimation and removal
Streak feature extraction
Star streak removal
Star streak detection(matched filter)
Satellitedetection
Stardetection
Streakunmerging
Condition 1: Satellite intensity > noiseDetection threshold
depends on the measured PSF
Alarm extraction
False alarm rejection
g gmeasured PSFBackground-free image - Stars (i.e. the filtered streaks) = image difference
Insertedtest pattern
for sensitivityevaluation
Condition 2:and
Satellite brighter than the overlapping streakCondition 2: Satellite brighter than the overlapping streak(with enough contrast)
Defence R&D Canada • R & D pour la défense Canada

Detection and alarm rejection
Bad pixel correction
Noise estimation
Background estimation and removal
Streak feature extraction
Star streak removal
Star streak detection(matched filter)
Satellitedetection
Stardetection
Streakunmerging
3- Rejection:Brighter than close
Alarm extraction
False alarm rejection
g g
PSF area
gstreak? (again)- connect to closest object
Closest streakmask2- Rejection:
- Object-to-object comparison: Brighter than mean brightness
Alarm does not overlap close streak mask
of overlapping streak?
Streak in the1- Alarm:
Single-pixel alarm Can be caused by
Streak in thePSF range
- Pixel-to-pixel comparison: Brighter than aligned pixel
Defence R&D Canada • R & D pour la défense Canada
ysignal pixelisation
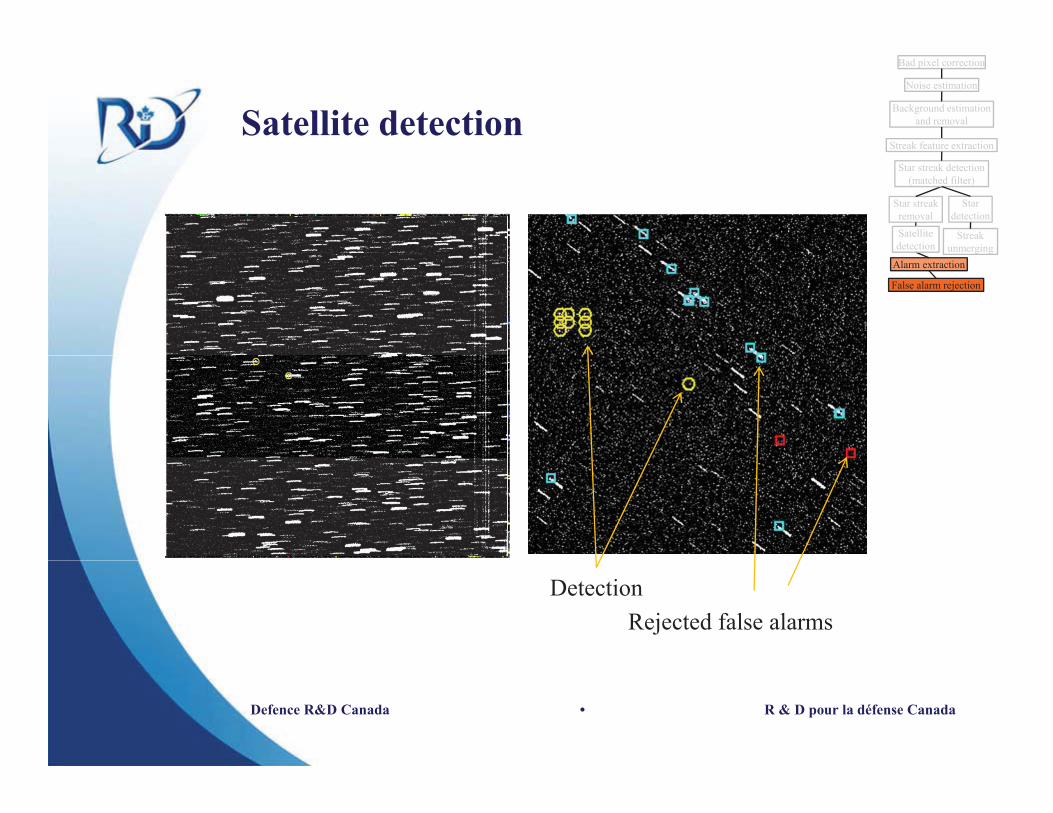
Satellite detection
Bad pixel correction
Noise estimation
Background estimation and removal
Streak feature extraction
Star streak removal
Star streak detection(matched filter)
Satellitedetection
Stardetection
Streakunmerging
Alarm extraction
False alarm rejection
g g
DetectionRejected false alarms
Defence R&D Canada • R & D pour la défense Canada

Sensitivity of SSM vs TRM acquisition
SSM: PSF=3
MODE Detection threshold
Required objecti t it
SSM PSF 3
SSM: PSF=3,Streak = 130 pixels
210 nintensity
TRM, PSF<1 9 n 9 n
TRM, PSF=3 3 n 45 nSSM: PSF=3,
Streak = 50 pixels 160 nSSM, 50 pixels n 160 n
SSM, 130 pixels n/2 210 n
TRM: PSF=3(3x3) local average
45 n
TRM: PSF<1Single pixel
9 n3 n /2
Defence R&D Canada • R & D pour la défense Canada
n n n/2

Detection algorithms for TRM image sequence
Is in development, it includes:- Star detection and astrometry done for each imagesy g
- Provides knowledge of real pointing (drift estimation)- Image registration
- Uses satellite predicted position and- track rate correction (drift correction) which uses the real sensor
pointing (astrometry) - Summation of registered images
- More sensitive detection (better SNR) with the summed image.- Differentiation of registered images
- Reject star streaks and cosmic ray hits.- Detection in individual frame:
- cued by the global detection,- uses a lower detection threshold;
Defence R&D Canada • R & D pour la défense Canada
* false alarm elsewhere are ignored.

Conclusions
- Detection algorithms developed for both SSM and TRM.- Star and satellite (point or streak) detection is f ll t tifully automatic.
- Iterative background estimation and removal more reliable and accurate than the classical dark frame method.a d accu ate t a t e c ass ca da a e et od.
- Iterative matched filter very efficient for streak detection.- Sensitivity limited by noise level:y y
- streak (very long) > 1 n (> 0.5 n),- single point object (in TRM) > 9 n,- adaptable to the PSF.
- Detection for TRM sequence in development.- TRM acquisition more sensitive than SSM.
Defence R&D Canada • R & D pour la défense Canada
