runtime safety analysis of multithreaded programs
DESCRIPTION
Runtime Safety Analysis of Multithreaded Programs. Koushik Sen University of Illinois at Urbana-Champaign, USA. Co-authors Grigore Rosu and Gul Agha. Talk Overview. Motivation MultiPathExplorer Motivating example Instrumentation based on vector clocks - PowerPoint PPT PresentationTRANSCRIPT
Runtime Safety Analysis of Multithreaded Programs
Koushik SenUniversity of Illinois at
Urbana-Champaign, USA
Co-authors Grigore Rosu and Gul Agha
04/19/232/33
JMPaX: http://fsl.cs.uiuc.edu/jmpax/
Talk Overview
Motivation
MultiPathExplorer Motivating example
Instrumentation based on vector clocks
Predict specification violations at runtime
System architecture
Further Applications
Conclusion and Future Work
04/19/233/33
JMPaX: http://fsl.cs.uiuc.edu/jmpax/
Increasing Software Reliability
Current solutions Human review of code and testing
Most used in practice Usually ad-hoc, intensive human support
(Advanced) Static analysis Often scales up False positives and negatives, annotations
(Traditional) Formal methods Model checking and theorem proving General, good confidence, do not always scale up
04/19/234/33
JMPaX: http://fsl.cs.uiuc.edu/jmpax/
Runtime Verification
Merge testing and temporal logic specification Specify safety properties
in proper temporal logic.
Monitor safety properties against a run of the program.
Examples: JPaX (NASA Ames), Upenn's Java MaC analyzes the observed run.
Disadvantage: Lack of coverage.
Run
Naïve Observer
04/19/235/33
JMPaX: http://fsl.cs.uiuc.edu/jmpax/
Our Approach: Smart Observer
Ideas A single execution trace
contains more information than appears at first sight
Extract other possible runs from a single execution
Analyze all these runs intelligently.
A technique between model checking and testing.
Run
Smart Observer
04/19/236/33
JMPaX: http://fsl.cs.uiuc.edu/jmpax/
Talk Overview
Motivation
MultiPathExplorer Motivating example
Instrumentation based on vector clocks
Predict specification violations at runtime
System architecture
Further Applications
Conclusion and Future Work
04/19/237/33
JMPaX: http://fsl.cs.uiuc.edu/jmpax/
MultiPathExplorer – JMPaX (Java)
Based on smart observers
Smartness obtained by proper instrumentation: vector clocks
Possible global states generated dynamically form a lattice
Analysis is performed on a level-by-level basis in the lattice of global states
04/19/238/33
JMPaX: http://fsl.cs.uiuc.edu/jmpax/
Motivating Example “Safe Landing”
Safe LandingLand the air/space craft only after approval from groundand only if, since then, the radio signal has not been lost
Safe LandingLand the air/space craft only after approval from groundand only if, since then, the radio signal has not been lost
Three variables: Landing indicating air/space craft is landing Approved indicating landing has been approved Radio indicating radio signal is live
Landing Approved, RadioLanding Approved, Radio
04/19/239/33
JMPaX: http://fsl.cs.uiuc.edu/jmpax/
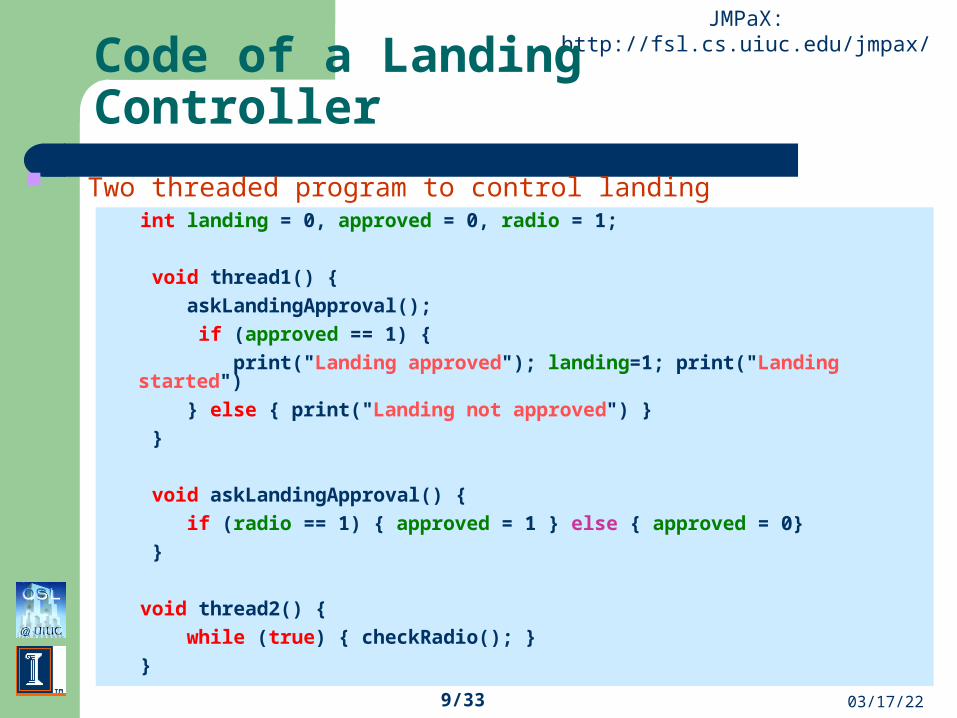
Code of a Landing Controller Two threaded program to control landing
int landing = 0, approved = 0, radio = 1;
void thread1() { askLandingApproval(); if (approved == 1) { print("Landing approved"); landing=1; print("Landing started") } else { print("Landing not approved") } }
void askLandingApproval() { if (radio == 1) { approved = 1 } else { approved = 0} }
void thread2() { while (true) { checkRadio(); } }
04/19/2310/33
JMPaX: http://fsl.cs.uiuc.edu/jmpax/
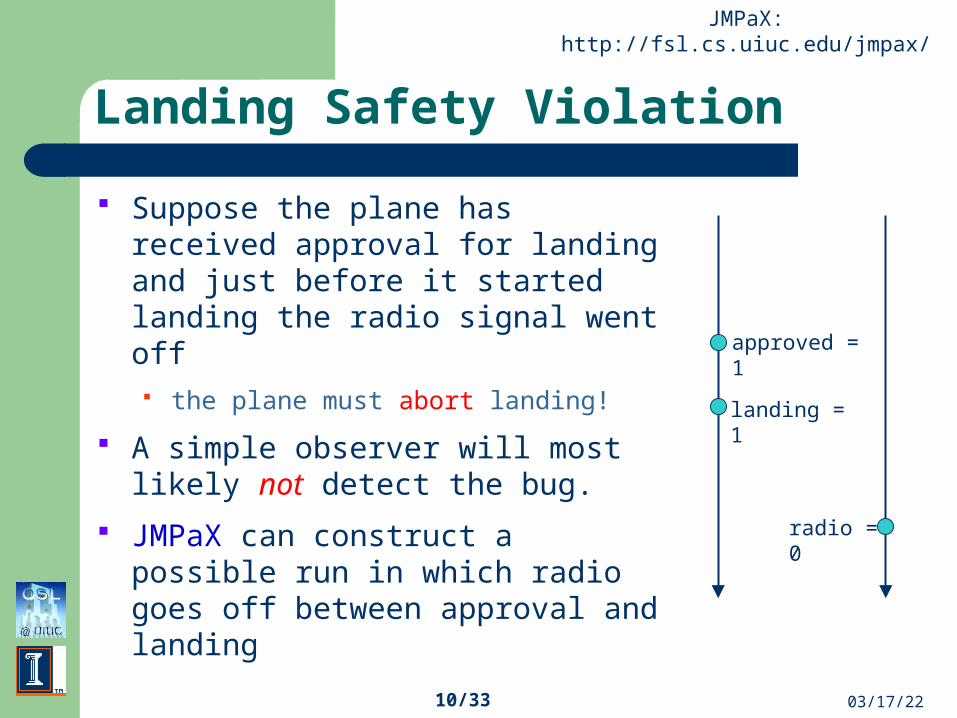
Landing Safety Violation
Suppose the plane has received approval for landing and just before it started landing the radio signal went off the plane must abort landing!
A simple observer will most likely not detect the bug.
JMPaX can construct a possible run in which radio goes off between approval and landing
approved = 1
landing = 1
radio = 0
04/19/2311/33
JMPaX: http://fsl.cs.uiuc.edu/jmpax/
Talk Overview
Motivation
MultiPathExplorer Motivating example
Instrumentation based on vector clocks
Predict specification violations at runtime
System architecture
Further Applications
Conclusion and Future Work
04/19/2312/33
JMPaX: http://fsl.cs.uiuc.edu/jmpax/
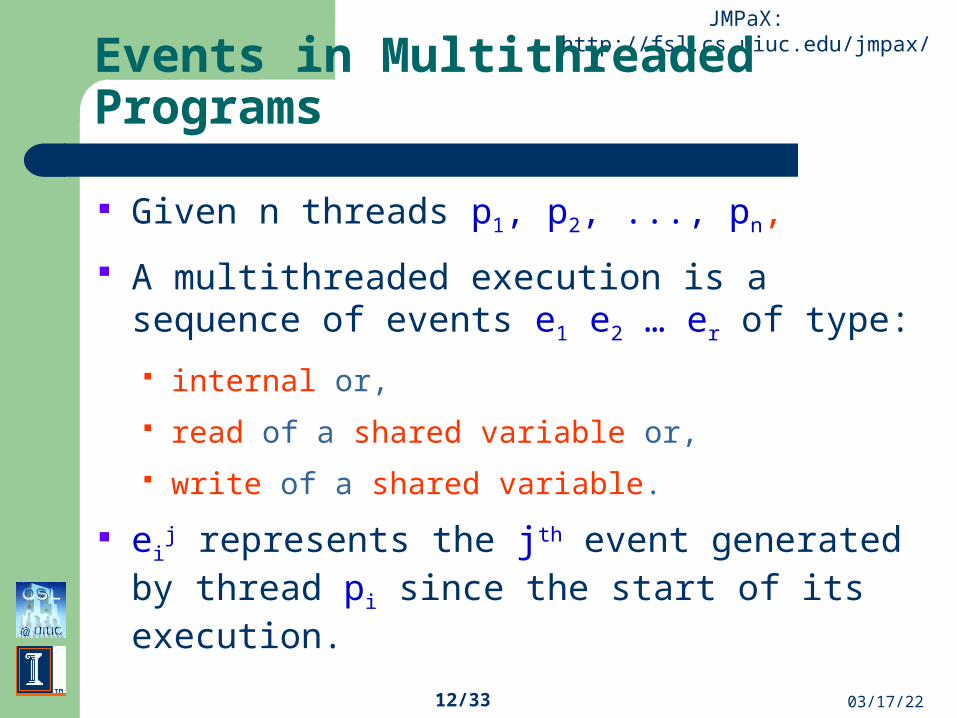
Events in Multithreaded Programs
Given n threads p1, p2, ..., pn,
A multithreaded execution is a sequence of events e1 e2 … er of type:
internal or,
read of a shared variable or,
write of a shared variable.
eij represents the jth event generated by
thread pi since the start of its execution.
04/19/2313/33
JMPaX: http://fsl.cs.uiuc.edu/jmpax/
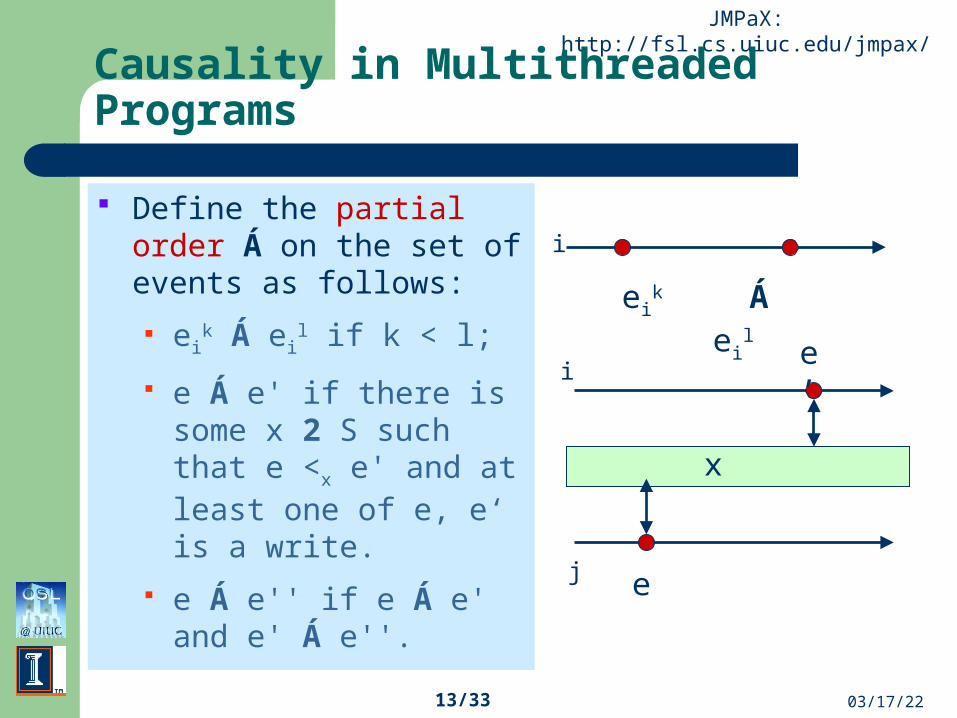
Causality in Multithreaded Programs
Define the partial order Á on the set of events as follows:
eik Á ei
l if k < l;
e Á e' if there is some x 2 S such that e <x e' and at least one of e, e‘ is a write.
e Á e'' if e Á e' and e' Á e''.
eik Á ei
l
i
x
i
j e
e’
04/19/2314/33
JMPaX: http://fsl.cs.uiuc.edu/jmpax/
Vector Clocks and Relevant Events
Consider a subset R of relevant events.
(typically those writing specification’s variables)
R-relevant causality is a relation C µ Á C is a projection of Á on R £ R.
We provide a technique based on vector clocks that correctly implements the relevant causality relation.
04/19/2315/33
JMPaX: http://fsl.cs.uiuc.edu/jmpax/
Vector Clock Algorithm
Let Vi be an n-dimensional vector of natural numbers for each thread pi.
Let Vxa and Vx
w be vectors for each shared variable x.
1. if eik is relevant, i.e., if ei
k 2 R, then Vi[i] Ã Vi[i] + 1
2. if eik is a read of a variable x then
Vi à max{Vi,Vxw}
Vxa à max{Vx
a,Vi}
3. if eik is a write of a variable x then
Vxw à Vx
a à Vi à max{Vxa,Vi}
4. if eik is relevant then
send message h eik, i, Vi i to observer.
04/19/2316/33
JMPaX: http://fsl.cs.uiuc.edu/jmpax/
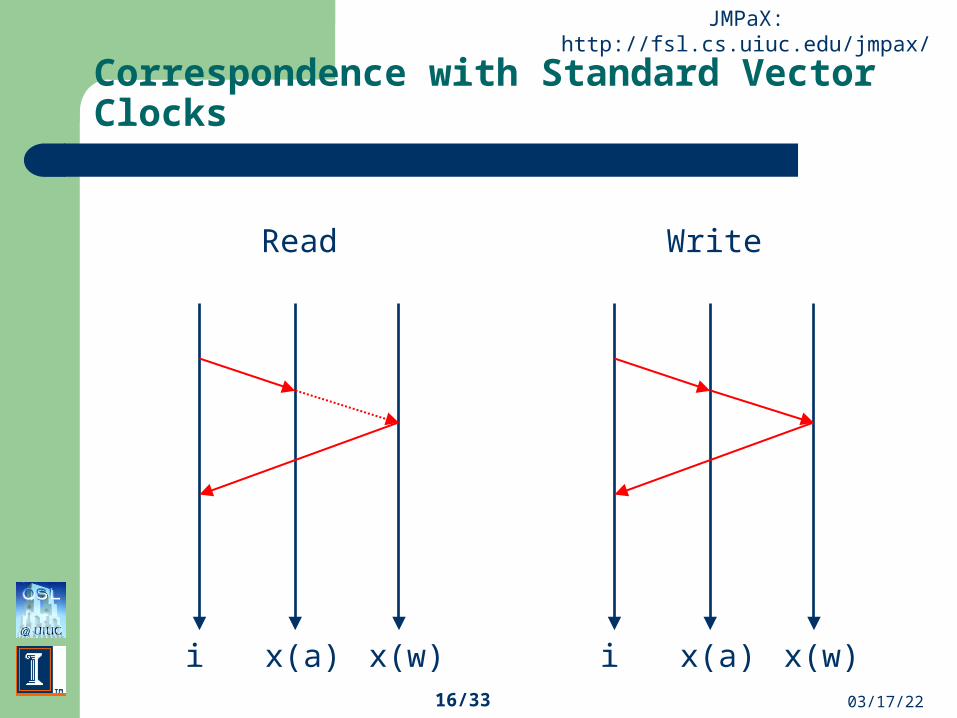
Correspondence with Standard Vector Clocks
i x(a) x(w)
Write
i x(a) x(w)
Read
04/19/2317/33
JMPaX: http://fsl.cs.uiuc.edu/jmpax/
Implementing Causality by Vector Clocks
Theorem: If he, i, Vi and he', j, V' i are messages sent by our algorithm, then
e C e' iff V[i] · V'[i]
If i and j are not given, then
e C e' iff V < V‘
04/19/2318/33
JMPaX: http://fsl.cs.uiuc.edu/jmpax/
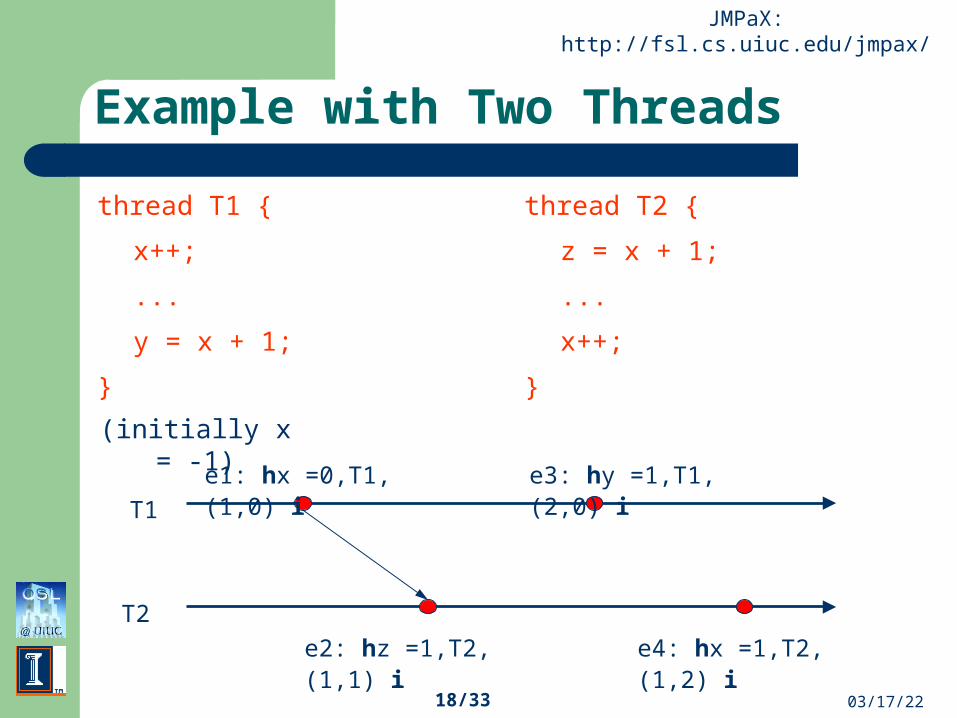
Example with Two Threads
thread T1 {
x++;
...
y = x + 1;
}
thread T2 {
z = x + 1;
...
x++;
}
T1
T2
e1: hx =0,T1, (1,0) i e3: hy =1,T1, (2,0) i
e4: hx =1,T2, (1,2) i e2: hz =1,T2, (1,1) i
(initially x = -1)
04/19/2319/33
JMPaX: http://fsl.cs.uiuc.edu/jmpax/
Relevant Global State
The program state after the events ek1
1,ek22,...,ekn
n is called a relevant global multithreaded state or simply a state.
A state k1 k2 … kn is called consistent if and only if it can be seen in some possible run of the system.
04/19/2320/33
JMPaX: http://fsl.cs.uiuc.edu/jmpax/
MultiThreaded Run
e1e2 … e|R| is a multithreaded run iff it generates a sequence of global states K0 K1 … K|R| such that
each Kr is consistent and
Kr after event er becomes Kr+1.
(consecutive states)
04/19/2321/33
JMPaX: http://fsl.cs.uiuc.edu/jmpax/
Computation Lattice
We say À ' when there is some run in which and ' are consecutive states
Consistent global states together with the transitive closure of À form a lattice
Multithreaded runs are paths in the lattice
04/19/2322/33
JMPaX: http://fsl.cs.uiuc.edu/jmpax/
Example Revisited
thread T1 {
x++;
...
y = x + 1;
}
thread T2 {
z = x + 1;
...
x++;
}
04/19/2323/33
JMPaX: http://fsl.cs.uiuc.edu/jmpax/
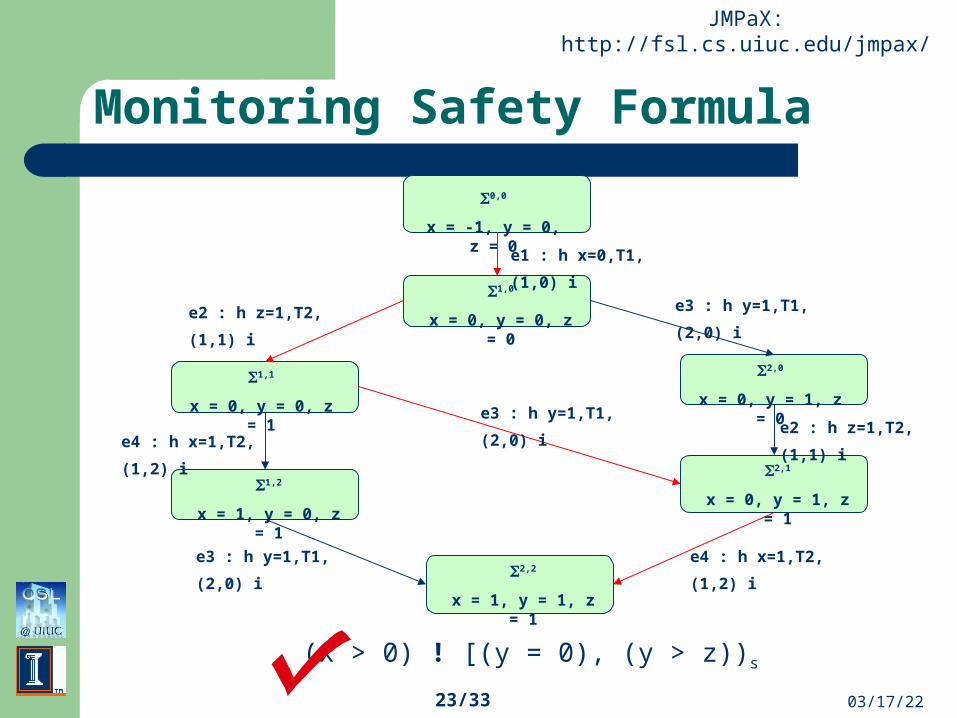
Monitoring Safety Formula
e1 : h x=0,T1, (1,0) i
e2 : h z=1,T2, (1,1) i e3 : h y=1,T1, (2,0) i
e2 : h z=1,T2, (1,1) i e3 : h y=1,T1, (2,0) i
e4 : h x=1,T2, (1,2) i
e3 : h y=1,T1, (2,0) i e4 : h x=1,T2, (1,2) i
0,0
x = -1, y = 0, z = 0
2,2
x = 1, y = 1, z = 1
1,2
x = 1, y = 0, z = 1
2,1
x = 0, y = 1, z = 1
2,0
x = 0, y = 1, z = 0
1,1
x = 0, y = 0, z = 1
1,0
x = 0, y = 0, z = 0
(x > 0) ! [(y = 0), (y > z))s
04/19/2324/33
JMPaX: http://fsl.cs.uiuc.edu/jmpax/
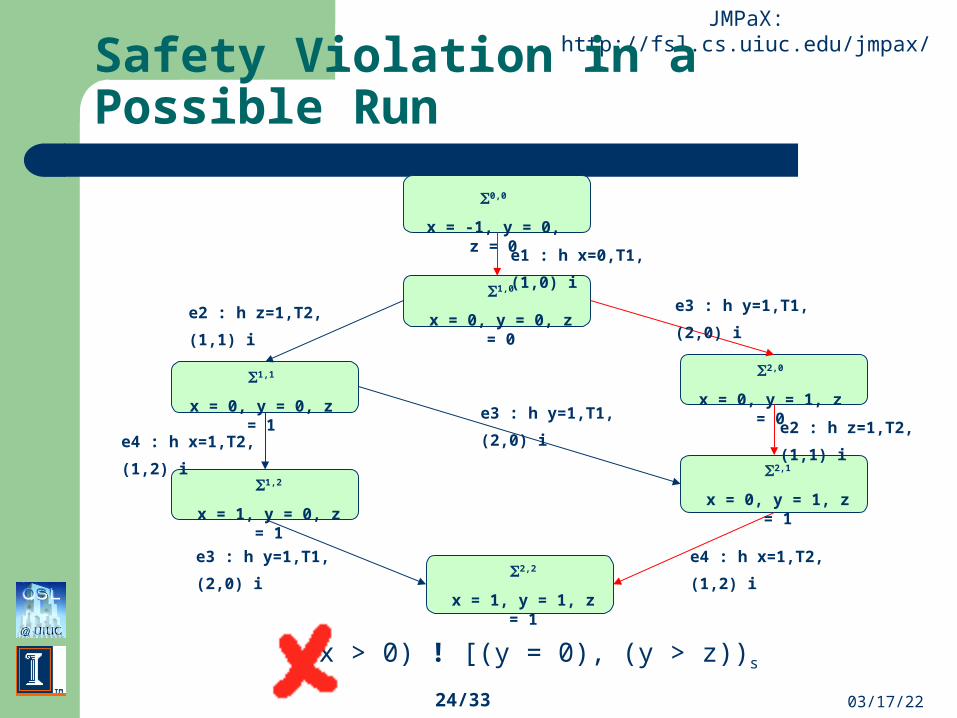
Safety Violation in a Possible Run
e1 : h x=0,T1, (1,0) i
e2 : h z=1,T2, (1,1) i e3 : h y=1,T1, (2,0) i
e2 : h z=1,T2, (1,1) i e3 : h y=1,T1, (2,0) i
e4 : h x=1,T2, (1,2) i
e3 : h y=1,T1, (2,0) i e4 : h x=1,T2, (1,2) i
0,0
x = -1, y = 0, z = 0
2,2
x = 1, y = 1, z = 1
1,2
x = 1, y = 0, z = 1
2,1
x = 0, y = 1, z = 1
2,0
x = 0, y = 1, z = 0
1,1
x = 0, y = 0, z = 1
1,0
x = 0, y = 0, z = 0
(x > 0) ! [(y = 0), (y > z))s
04/19/2325/33
JMPaX: http://fsl.cs.uiuc.edu/jmpax/
Talk Overview
Motivation
MultiPathExplorer Motivating example
Instrumentation based on vector clocks
Predict specification violations at runtime
System architecture
Further Applications
Conclusion and Future Work
04/19/2326/33
JMPaX: http://fsl.cs.uiuc.edu/jmpax/
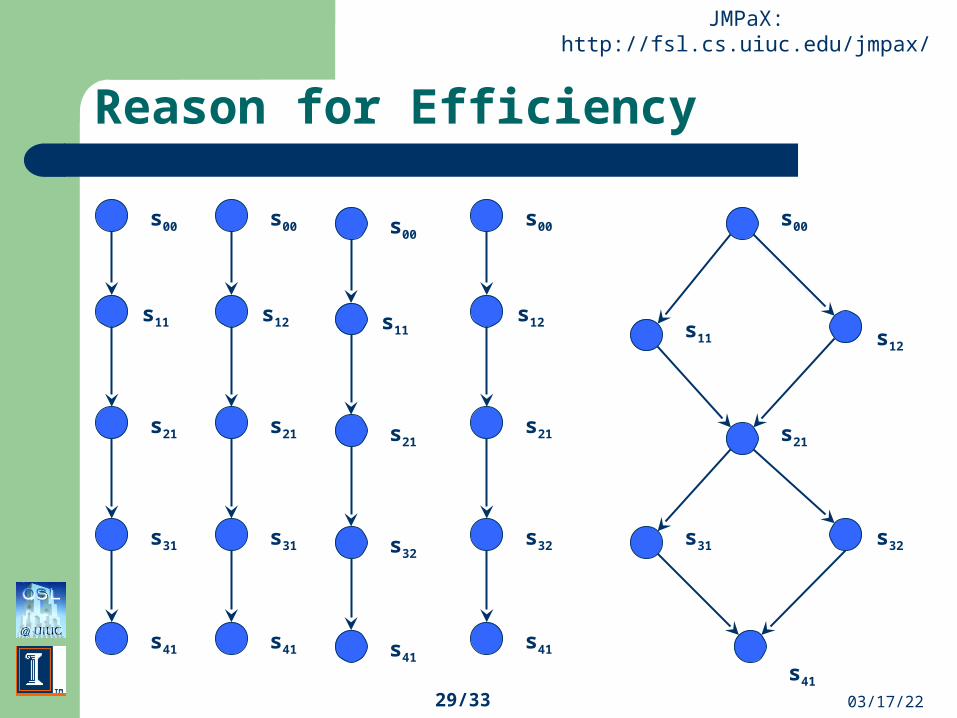
Safety Against All Runs
Number of possible runs can be exponential
Traverse the state lattice level by level Avoids analyzing an exponential number of runs
Maintain a queue of events Enqueue an event as soon as it arrives
Construct a new level from the set of states in the previous level and the events in the queue
Monitor safety formula against all states in a level using dynamic programming and intelligent merging.
04/19/2327/33
JMPaX: http://fsl.cs.uiuc.edu/jmpax/
Algorithm Pseudocode
for each (e 2 Q) {
if exists s 2 CurrentLevel s.t. isNextState(s,e) then
NextLevel à addToSet(NextLevel,createState(s,e));
if isUnnecessary(s) then
remove(s,CurrentLevel);
if isEmpty(CurrentLevel) then {
monitorAll(NextLevel);
CurrentLevel à NextLevel; NextLevel à {};
Q Ã removeUnnecessaryEvents(CurrentLevel,Q);
}
}
04/19/2328/33
JMPaX: http://fsl.cs.uiuc.edu/jmpax/
Complexity
Time complexity is O(w.2m.n) w – width of the lattice m – size of the formula n – length of the run
Memory used is O(w.2m’) w – width of the lattice m’ – number of temporal operators in the
formula
Further optimizations Consider bounded width w of queue Q
04/19/2329/33
JMPaX: http://fsl.cs.uiuc.edu/jmpax/
Reason for Efficiency
s00
s41
s32s31
s21
s12s11
s00
s11
s21
s31
s41
s00
s12
s21
s31
s41
s00
s11
s21
s32
s41
s00
s12
s21
s32
s41
04/19/2330/33
JMPaX: http://fsl.cs.uiuc.edu/jmpax/
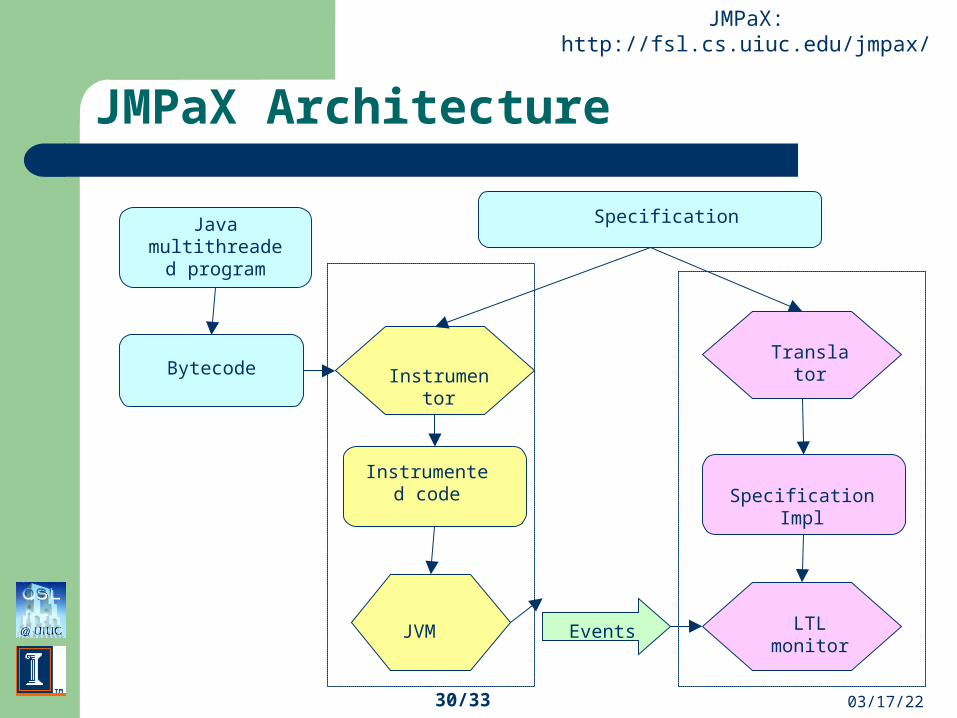
JMPaX Architecture
Java multithreaded
program
Bytecode
Specification
Instrumentor
Instrumented code
JVM
Translator
LTL monitor
SpecificationImpl
Events
04/19/2331/33
JMPaX: http://fsl.cs.uiuc.edu/jmpax/
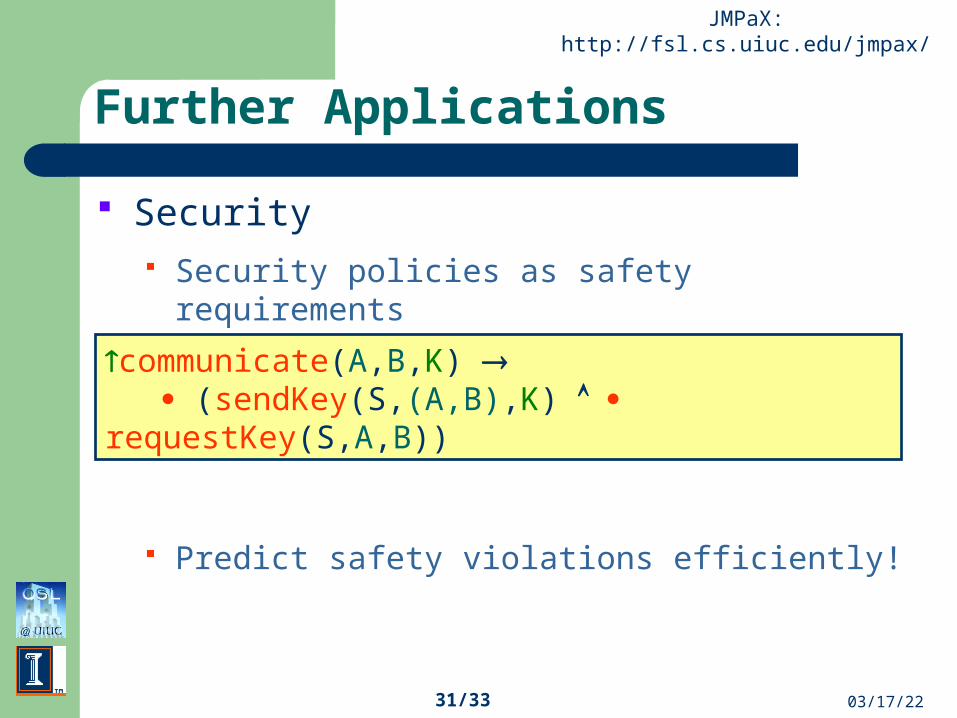
Further Applications
Security Security policies as safety requirements
Predict safety violations efficiently!
communicate(A,B,K) (sendKey(S,(A,B),K) requestKey(S,A,B))
04/19/2332/33
JMPaX: http://fsl.cs.uiuc.edu/jmpax/
Contributions
Introduce vector clock algorithm in multithreaded systems to capture relevant causality.
Efficiently Predict safety errors from successful runs.
A modular implementation of the above ideas in a analysis tool, JMPaX. http://fsl.cs.uiuc.edu/jmpax/ for JMPaX
prototype.
04/19/2333/33
JMPaX: http://fsl.cs.uiuc.edu/jmpax/
Future Work
Evaluate JMPaX on real, large applications Develop predictive algorithms for other
requirements specification logics Consider a superset of partial order to
gain efficiency Find more scalable techniques that can
fill the gap between model checking and testing
Integrate with NASA Ames’ Java PathExplorer Tool (JPaX).