roteiro de atividades
DESCRIPTION
Descrição da atividade realizada em laboratório.TRANSCRIPT

UNIVERSIDADE FEDERAL DO RIO GRANDE DO SULInstituto de Física
Programa de Mestrado Profissional em Ensino de Física
Utilizando a Placa Arduino para Determinação da Aceleração
numa Máquina de Atwood
ROTEIRO EXPERIMENTAL – PARA PROFESSORES
Professores:Claodomir Antonio MartinazzoLuciano Lewandoski AlvarengaMaria Teresinha Xavier Silva
Orientação: Marisa Almeida Cavalcante
Porto Alegre, julho de 2011

UNIVERSIDADE FEDERAL DO RIO GRANDE DO SULInstituto de Física
Programa de Mestrado Profissional em Ensino de Física
1 OBJETIVOS
Verificar a aceleração de um corpo utilizando a Máquina de Atwood com aquisição
automática de dados via Arduino;
Calcular a velocidade média de um corpo acelerado em uma Máquina de Atwood;
Calcular a velocidade instantânea de um corpo em determinada posição;
3 MATERIAIS UTILIZADOS
Um conjunto de roldanas;
Dois corpos de 0,5kg;
Um corpo de 0,01 kg.
Um fio inextensível;
Um computador equipado com um sistema de aquisição de dados baseado na placa
Arduino Duemilanove.
Dois pares sensores LDR/LED.
Conjunto de conectores elétricos, 2 resistores de 10 k e 2 resistores de 330
3 INTRODUÇÃO TEÓRICA
A Máquina de Atwood utilizada neste experimento consiste em um par de polias
fixas, muito leves e de baixo atrito, nas quais são suspensos dois corpos de massas desiguais
M1 e M2, respectivamente, unidos por um cordão de massa desprezível (figura 1).
Supondo que M1 seja maior do que M2, os corpos aceleram de tal modo que o corpo
2 sobe enquanto o corpo 1 desce. Portanto, considerando-se que o fio seja inextensível, e
tomando-se como positiva a aceleração para cima, se a aceleração do corpo 2 for + a, a
aceleração do corpo 1 deverá ser – a. (Necessariamente, as acelerações são de mesmo módulo
UNIVERSIDADE FEDERAL DO RIO GRANDE DO SULInstituto de Física
Programa de Mestrado Profissional em Ensino de Física
mas de sentidos opostos e, além disso, são constantes já que as resultantes das forças exercidas
sobre cada um dos corpos são constantes.)
A máquina de Atwood, mesmo sendo um dispositivo muito simples, apresenta
algumas vantagens que a tornam especial para o estudo das leis de Newton: (1) a aceleração
pode ser tornada muito pequena, o que facilita a obtenção de medidas de tempo e (2) se
imaginarmos que as polias têm massa e atrito desprezíveis, o problema se reduz ao estudo das
acelerações nos movimentos de translação das massas M1 e M2.
2a
lei de
Newton
relaciona
a
resultante
das
forças
exercidas
sobre um
corpo
com a
aceleração sofrida por ele. Para aplicar essa lei a um determinado corpo devemos,
inicialmente, “isolar”, isto é, identificar claramente qual é esse corpo.
No nosso caso, temos os corpos de massas M1 e M2. Isolando primeiro M1, assinalamos
as forças exercidas sobre ele (ver o diagrama de forças na figura 1) e aplicamos a 2a lei de
Figura 01 – Máquina de Atwood.

UNIVERSIDADE FEDERAL DO RIO GRANDE DO SULInstituto de Física
Programa de Mestrado Profissional em Ensino de Física
Newton. Consideramos a direção de movimento para cima como sendo positiva. Para a massa
M1 obtemos então a seguinte equação:
T1 – M1g = M1a (1)
Esta equação contém duas incógnitas: T1 e a.
Aplicando o mesmo raciocínio para M2 (que se move para baixo), escrevemos:
M2g –T2 = M2a (2)
Tomando T1= T2 = T, somamos as equações 1 e 2 para eliminar T e obtendo,
(3)
para a aceleração. Note que o módulo da aceleração depende tanto da diferença quanto da
soma das massas dos corpos suspensos.
Substituindo a (equação 3) na equação 1 ou na equação 2, obtemos
(4)
4 ATIVIDADE EXPERIMENTAL
Caro professor, vamos começar pela montagem do arranjo experimental.

UNIVERSIDADE FEDERAL DO RIO GRANDE DO SULInstituto de Física
Programa de Mestrado Profissional em Ensino de Física
Etapa1 – Montagem da Máquina de Atwood.
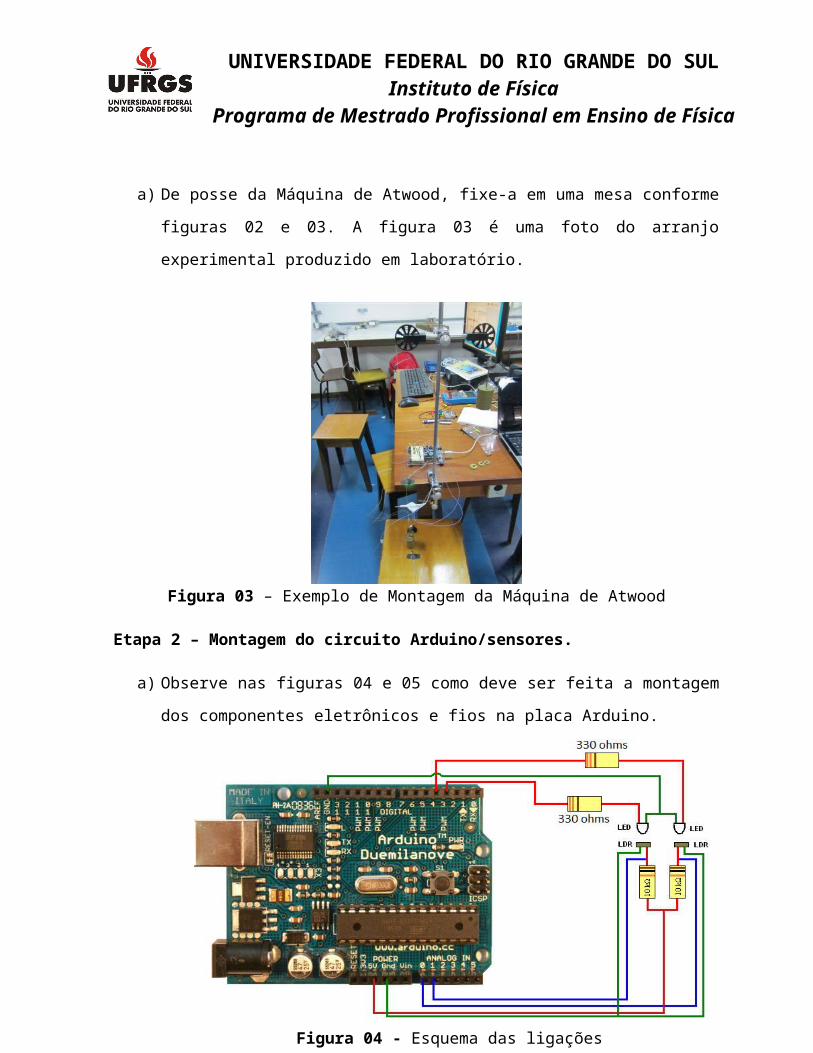
a) De posse da Máquina de Atwood, fixe-a em uma mesa conforme figuras 02 e 03. A
figura 03 é uma foto do arranjo experimental produzido em laboratório.
Figura 03 – Exemplo de Montagem da Máquina de Atwood
Etapa 2 – Montagem do circuito Arduino/sensores.
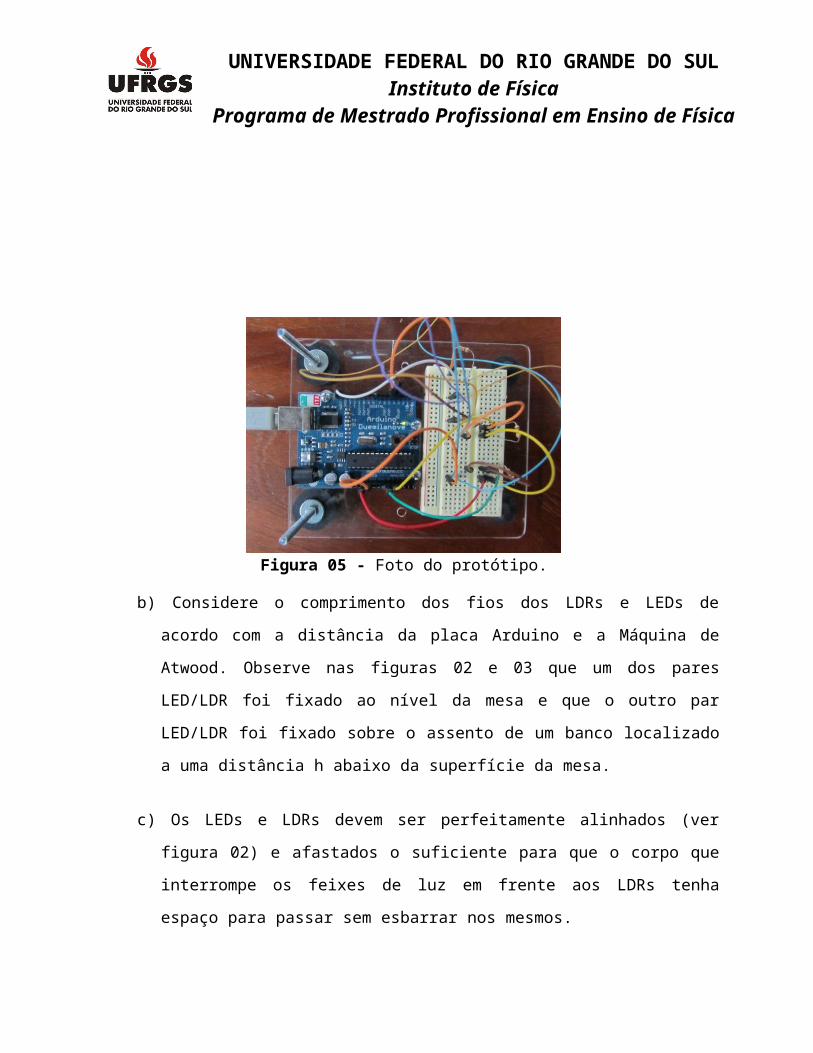
a) Observe nas figuras 04 e 05 como deve ser feita a montagem dos componentes
eletrônicos e fios na placa Arduino.
Figura 04 - Esquema das ligaçõesFigura 05 - Foto do protótipo.
Figura 02 – Esquema experimental.

UNIVERSIDADE FEDERAL DO RIO GRANDE DO SULInstituto de Física
Programa de Mestrado Profissional em Ensino de Física
b) Considere o comprimento dos fios dos LDRs e LEDs de acordo com a distância da
placa Arduino e a Máquina de Atwood. Observe nas figuras 02 e 03 que um dos pares
LED/LDR foi fixado ao nível da mesa e que o outro par LED/LDR foi fixado sobre o
assento de um banco localizado a uma distância h abaixo da superfície da mesa.
c) Os LEDs e LDRs devem ser perfeitamente alinhados (ver figura 02) e afastados o
suficiente para que o corpo que interrompe os feixes de luz em frente aos LDRs tenha
espaço para passar sem esbarrar nos mesmos.
OBSERVAÇÃO: No momento em que o corpo 2 desobstrui o feixe de luz do primeiro
sensor o sistema Arduino inicia a impressão do tempo na tela do Monitor Serial. Quando
o corpo 2 obstrui a passagem de luz do sensor inferior, a contagem de tempo é
interrompida.
d) Conecte a placa Arduino a uma porta USB do computador.
e) Rode o programa Arduino e digite o seguinte código:
//Definição de variáveisint LDR1; //declara a variavel 1int LDR2; //declara a variavel 2
unsigned long time1;
void setup() { pinMode(A0, INPUT); //Ativa pino Analógico 0 para entrada pinMode(A1, INPUT); //Ativa pino Analógico 1 para entrada pinMode(3, OUTPUT); //Ativa pino Digital 3 para saída (energiza LED) pinMode(4, OUTPUT); //Ativa pino Digital 4 para saída (energiza LED) Serial.begin(9600); //Determina taxa de transmissão de dados para 9600 bauds. } void loop(){
UNIVERSIDADE FEDERAL DO RIO GRANDE DO SULInstituto de Física
Programa de Mestrado Profissional em Ensino de Física
// Energizar LEDs digitalWrite(3, HIGH); //eleva estado da porta digital 3 para Alto (5V) digitalWrite(4, HIGH); //eleva estado da porta digital 4 para Alto (5V) // Ler estado das portas digitais 1 e 2 LDR1 = analogRead(A0); // Ler estado da porta analógica 0 LDR2 = analogRead(A1); // Ler estado da porta analógica 1 if (LDR1 < 810) { // Se LDR1 estiver iluminado executar a próxima instrução if (LDR2 < 810){ // Se LDR2 estiver escurecido executar a próxima instrução time1 = millis(); // Ler o tempo da máquina Serial.println(time1); // Imprimir no Serial Monitor o tempo lido na máquina } }}
f) Clique no botão para compilar o programa.
Etapa 3 – Aquisição dos dados
a) Meça a altura h entre a base do corpo 2 e a superfície do banco (ver figura 02).
b) Segure o corpo 2 na posição que obstrui o feixe de luz do LED1 e adicione 10 g a ele.
c) Clique no botão para enviar o código para a placa Arduino.
d) Clique no botão Serial Monitor, conforme figura 06.
UNIVERSIDADE FEDERAL DO RIO GRANDE DO SULInstituto de Física
Programa de Mestrado Profissional em Ensino de Física
Figura 06 – Botão Serial Monitor
e) Após iluminação dos LEDs, libere o conjunto corpo 2 + massa extra (10 g). A
contagem de tempo é iniciada no monitor do aplicativo e é interrompida na chegada da
massa ao ponto de obstrução do outro interruptor óptico (sobre o banco). A partir dos
dados do Serial Monitor, calcule o intervalo de tempo decorrido desde o início do
movimento até o final do mesmo. Preencha a coluna “Intervalo de tempo” do quadro
apresentado na Tabela 1. Repita a operação por 12 vezes.
f) Use esses resultados e os seus conhecimentos de cinemática para determinar a
aceleração dos corpos, a velocidade média e a velocidade instantânea ao final do
percurso, preenchendo a Tabela 1.
g) Use seus conhecimentos de estatística para calcular as estatísticas de todas as variáveis
apresentadas na Tabela 1.
h) Calcule, utilizando seus conhecimentos sobre a Dinâmica da Máquina de Atwood (ver a
INTRODUÇÃO TEÓRICA), o valor esperado da aceleração para os corpos utilizados
no experimento, considerando que a Máquina de Atwood seja ideal, e complete a
coluna “aceleração esperada”, ou simplesmente escreva em apenas uma célula, uma
vez que todas serão iguais.
i) Calcule o erro percentual entre o valor médio obtido experimentalmente para a
aceleração dos corpos e o valor esperado. Utilize a equação 5.
(5)
j) Quais são as possíveis fontes de erro utilizando-se esse equipamento?
k) Como é possível, se existir, diminuir a influência das fontes de erro sobre as medidas?

UNIVERSIDADE FEDERAL DO RIO GRANDE DO SULInstituto de Física
Programa de Mestrado Profissional em Ensino de Física
l) Escreva sua conclusão sobre os resultados obtidos.
Tabela 1 – Medidas de tempo, estatísticas e resultados cinemáticos do movimento dos corpos na Máquina de Atwood.
Estatísticas Intervalo de tempo
Aceleração Medida
Aceleração Esperada Erro Velocidade
MédiaVelocidade Instantânea
MédiaDesvio PadrãoDesvio Padrão da Média
OBSERVAÇÃO: A tabela 2 mostra os resultados obtidos em 12 repetições das medidas de tempo utilizando o programa escrito e rodado em Arduino.
A Aceleração Média Obtida: 0,103m/s2
Aceleração Esperada: 0,097m/s2utilizando-se a equação 3 foi de
Calculando-se o Erro Percentual pela equação 5, obteve-se 6,2%
Tabela 2 – Medidas de tempo, estatísticas e resultados cinemáticos do movimento dos corpos na Máquina de Atwood.
Estatísticas Intervalo de tempo
Aceleração Medida
Aceleração Esperada Erro Velocidade
MédiaVelocidade Instantânea
2,176 0,103 0,097 -0,006 0,113 0,2252
UNIVERSIDADE FEDERAL DO RIO GRANDE DO SULInstituto de Física
Programa de Mestrado Profissional em Ensino de Física
2,163 0,105 0,097 -0,008 0,113 0,2265
2,257 0,096 0,097 -0.001 0,109 0,2171
2,213 0,100 0,097 -0,003 0,111 0,2214
2,196 0,102 0,097 -0,005 0,112 0,2231
2,214 0,100 0,097 -0,003 0,111 0,2213
2,200 0,101 0,097 -0,004 0,111 0,2227
2,152 0,106 0,097 -0,009 0,114 0,2277
2,169 0,104 0,097 -0,007 0,113 0,2259
2,168 0,104 0,097 -0,007 0,113 0,2260
2,110 0,110 0,097 -0,013 0,116 0,2322
2,145 0,106 0,097 -0,009 0,114 0,2284
Média 2,180 0,103 0,097 -0,006 0,112 0,225
Desvio Padrão 0,037 0,004 - 0,003 0,002 0,004
Desvio Padrão da Média
0,011 0,001 - 0,001 0,001 0,001
7 REFERÊNCIAS BIBLIOGRÁFICAS
ALVARENGA, Beatriz e MÁXIMO, Antônio. Curso de Física, volume 1. Ed. Scipione,2000.
CAVALCANTE, M. A.; BONIZZIA, A.; GOMES, L. C. Aquisição de Dados em Laboratório
de Física: um Método Simples, Fácil e de Baixo Custo para Experimentos em Mecânica.
Revista Brasileira de Ensino de Física, v. 30, n. 2, 2501 (2008). Disponível em:
http://www.sbfisica.org.br/rbef/pdf/302501.pdf. Acesso em: 22 de julho de 2010.
CAVALCANTE, Marisa Almeida, O que é Arduíno? (arquivo ArduinoParte1_Blink) diponível em : https://skydrive.live.com/cid=59bcf284a2d396aa&sc=documents&id=59BCF284A2D396AA!150. Acessado em 21/07/2011.
CAVALCANTE, Marisa Almeida, Leitura de Porta Analógica com um LDR (arquivo ArduinoParte2_porta_analogica) diponível em :

UNIVERSIDADE FEDERAL DO RIO GRANDE DO SULInstituto de Física
Programa de Mestrado Profissional em Ensino de Física
https://skydrive.live.com/cid=59bcf284a2d396aa&sc=documents&id=59BCF284A2D396AA!150. Acessado em 21/07/2011.
CAVALCANTE, Marisa Almeida, Construindo um alarme ótico (arquivo ArduinoParte3_Alarmeotico) diponível em : https://skydrive.live.com/cid=59bcf284a2d396aa&sc=documents&id=59BCF284A2D396AA!150. Acessado em 21/07/2011.
CAVALCANTE, Marisa Almeida, Função map: Saídas e PWM (arquivo
ArduinoParte4_PWM_funcao_map) diponível em :
https://skydrive.live.com/cid=59bcf284a2d396aa&sc=documents&id=59BCF284A2D396AA!
150. Acessado em 21/07/2011.
E_física. Maquina de Atwood. Ensino de Física On-line - USP. São Paulo: 2011. Disponível em: <http://efisica.if.usp.br/mecanica/universitario/corpo_rigido_dinamica/maq_atwood/>. Acesso em: 22 jul. 2011.
GASPAR, A. Física. São Paulo: Ática, 2000. v. 1.