robust tracking by ilya levner [email protected]
Post on 22-Dec-2015
242 views
TRANSCRIPT


OutlineOutline
• Introduction
• Survey of existing techniques– Anti-failure– Post-failure
• IFA
– Pros & Cons
• Research Direction
IntroductionIntroduction
x*(t) – the true state of target objectXin(t) – the input state setXout(t) – the output state set Accuracy – x*(t) є Xout(t) Precision - |Xout(t)|-1
Robustness - The ability to accurately and precisely track objects under less than ideal conditions.

RobustnessRobustness CategoriesCategories
• Anti-failure – prevention of errors (I.e. precision loss) and failure.
• Post-failure – recovery from failure
Anti-failureAnti-failure
• Seeded by attempts in 1953 to create robust statistical estimators.
• Has received the most attention from the vision community w.r.t post-failure.

Anti-failure ApproachesAnti-failure ApproachesWindow Processing and Foveation
– Ignore/blur the image around the target to avoid/remove background distractions.
Robust Matching Techniques– Handle occlusion by
• detection of outliers
Color cue concentration– Enables a tracker to handle changes in lighting.
CONDENSATION– Generalized Kalman filters– Handle agile motion

Post-failure RobustnessPost-failure Robustness
“The synthesis of reliable organisms from unreliable parts” von Neumann, 1952
• Implies non-catastrophic error/ failure recovery
Post-failure (cont)Post-failure (cont)
• Most active research in field of planning– Replanning paths
• Behaviour-Based Robotics– “emergent” intelligence known to display post-
failure robustness. (subsumption architecture)
• Limited work in the visual tracking domain
Incremental Focus of Attention Incremental Focus of Attention System (IFA)System (IFA)
• Biologically inspired methodology– Pre-attentive mechanisms select a target subregion– Post-attentive examine the subregion for relevance
• IFA uses a hierarchy of:– selectors that search for a subregion containing the
target – trackers which keep the focus on the target.
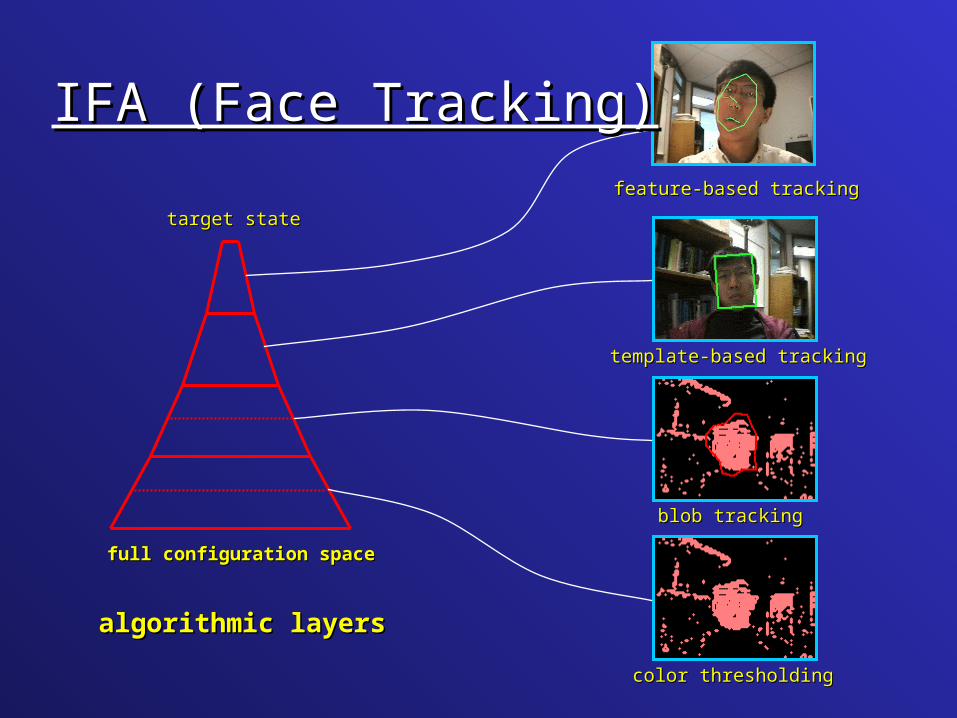
color thresholdingcolor thresholding
blob trackingblob tracking
template-based trackingtemplate-based tracking
targettarget statestate
full configuration spacefull configuration space
algorithmic layersalgorithmic layers
feature-based trackingfeature-based tracking
IFA (Face Tracking)IFA (Face Tracking)

Technique ComparisonTechnique Comparison
Robustness to Occlusion
• Anti-failure Method– robust statistics to filter out the non-signal data.
• SSD tracker with oulier detection
• Post-failure Method– IFA
• Same SSD tracker without outlier mechanism at the top layer.
ResultsResultsIdeal Conditions (no occlusion)
– Equal precision– AF is 15-20% slower due to overhead processing
Small Occlusions– AF tracks at full precision– PF drops to color blob tracking, resulting in a significant
loss of precision. (Recovery within 100msec)
Large-Full Occlusions (>40% of target)– AF looses target region and never recovers– PF takes between 150ms to several seconds for recovery to
full precision.

Anti-failureAnti-failureProsPros
• Handles specific perturbations well.
• Can avert catastrophic failure
ConsCons• Different modes of failure
require individual contingencies
• In ideal conditions slows down the system
• Difficult if not impossible to achieve in real-world systems (too many things can go wrong)
Post-failurePost-failure
ProsPros• A single procedure usually
enough to recover from any failure type.
• Dormant in ideal conditions
ConsCons• Meaningless in a catastrophic
failure case(s).
• Fixed (hand-coded) hierarchy
• Slow recovery at times

ExtensionsExtensions
Add Learning Module(s) to IFA
• Motion prediction (AF / PF – recovery optimization)
• Dynamic Tracker Selection ?

Motion PredictionMotion Prediction
• Past attempts used Kalman Filter
• Why not try HMM/CHMM to predict motion.– Let δμ* be the true change in motion
parameters (state)– ~δμ computed motion parameters
(observations)

Plan of Action
1) Construct a rudimentary IFA system, 3-4 layers consisting of:
• x,y translation trackers at 1,1/2,1/4 resolution• Color blob tracker
2) Construct an HMM for each level within the hierarchy
3) Couple the HMM’s together (CHMM)

Hidden Markov Model(s)

Coupled HMM, A matrix.

Issues
• Relearning– The A matrix will become uniform, i.e. all state
transitions have equal probabilities.– How can recent states transitions have more
weight in the Baum-Welch training phase ??
• Search depth

References