robust stabilization of nonlinear interconnected...
TRANSCRIPT
ARTICLE IN PRESS
0967-0661/$ - se
doi:10.1016/j.co
�CorrespondE-mail addr
(T. Chen).
Control Engineering Practice 15 (2007) 639–654
www.elsevier.com/locate/conengprac
Robust stabilization of nonlinear interconnected systems withapplication to an industrial utility boiler
Adarsha Swarnakar�, Horacio Jose Marquez, Tongwen Chen
Department of Electrical and Computer Engineering, University of Alberta, Edmonton, Canada T6G2V4
Received 5 January 2006; accepted 6 November 2006
Available online 26 December 2006
Abstract
This paper presents a new scheme for robust stabilization of nonlinear interconnected systems, based on linear matrix inequalities
(LMIs). The fact that the improvement in stability is significant and the controller uses only the output information of plant leads to the
name robust output feedback control. The control design is formulated as a convex optimization problem, which makes it
computationally tractable, when the problem size increases. The controller concept is then evaluated on a natural circulation drum boiler
(utility boiler), where the nonlinear model describes the complicated dynamics of the drum, downcomer, and riser components. The
linearized system is non-minimum phase and has two poles at the origin, which are major sources of interaction, bandwidth limitation
and instability. Simulation results are presented which show the effectiveness of the proposed control against instabilities following
sudden load variations. The control is also effective for steady state operation.
r 2006 Elsevier Ltd. All rights reserved.
Keywords: LMI applications; Output feedback; Nonlinear systems; Boiler systems; Control applications; Robustness
1. Introduction
Interconnected systems can be found in diverse fieldssuch as power systems, space structures, robotics, andmanufacturing processes. During the last few decades,many researchers in the field of power systems have beendevoted to decentralized robust control strategies (Illic &Zaborszky, 2000; Kundur, 1994; Siljak, 1978, 1991; Siljak,Stipanovic, & Zecevic, 2002; Zecevic, Neskovic, & Siljak,2004). This is due to its simplified design procedure, failuretolerance capability, less communication overhead and itswide acceptance by the operators in industry. There arealso spectacular changes in the power plants caused byincreasing demand for rapid changes in power generation.This deregulation leads to more rigorous requirements onthe control systems for the processes. Also in a deregulatedenvironment, systems tend to be more stressed and the load
e front matter r 2006 Elsevier Ltd. All rights reserved.
nengprac.2006.11.004
ing author. Tel.: +1780 492 3368; fax: +1 780 492 1811.
esses: [email protected] (A. Swarnakar),
alberta.ca (H.J. Marquez), [email protected]
distribution is in fact impossible for the operators toforesee. Under these situations, it is necessary to developrobust control strategies that can keep the processesoperating well under large changes in operating conditionsand can defend them against both large and smalldisturbances, whenever they may arise.Recently, there has been a strong research effort towards
the development of decentralized robust control strategies,including decentralized turbine/governor control (Jain &Khorrami, 1997; Jiang, Chai, Dorsey, & Qu, 1997; Qu,Dorsey, Bond, & McCalley, 1992; Siljak et al., 2002; Wang,Hill, & Guo, 1998) and decentralized excitation control(Cai, Qu, & Dorsey, 1996; Chapman, Ilic, King, Eng, &Kaufman, 1993; Guo, Wang, & Hill, 2000; King, Chap-man, & Ilic, 1994; Xie, Xie, Wang, & Guo, 2000; Zecevicet al., 2004). A linear feedback law based on the solution ofparameterized Riccati equations for each subsystem wasdeveloped in Wang et al. (1998). These ideas have beenextended to robust exciter control based on the concept ofdirect feedback linearization, which transforms the originalnonlinear model into a linear one. This kind of transfor-mation makes the control design straightforward, but the

ARTICLE IN PRESSA. Swarnakar et al. / Control Engineering Practice 15 (2007) 639–654640
real-time implementation becomes complicated by the factthat the resulting controller is nonlinear. There are alsoseveral results introduced in Cai et al. (1996), Jiang et al.(1997); and Cai, Qu, Gan, and Dorsey (2000), where linearfeedback control law is based on appropriately chosenLyapunov functions to produce lower bounds for localgains. This method, however, incorporates a quadraticterm in the model which cannot be properly used inanalysis. In Cai et al. (1996), this issue was resolved byintroducing a partial linearization, which leads to eliminat-ing the quadratic term from the model. An efficientapproach based on linear matrix inequalities (LMIs) wasthen proposed in Zecevic et al. (2004), which does notrequire any approximations and removes most of therestrictions in previous design methods.
The main objective of this paper is to apply the multi-faceted LMI tools (Boyd, Ghaoni, Feron, & Balakrishnan,1994; Ghaoui & Niculesu, 2000) to the design of a robustdecentralized output feedback control strategy, and itsapplication to an industrial utility boiler. A method ofdesigning a decentralized static state feedback controlstrategy based on LMIs has been developed in Siljak et al.(2002), Siljak and Zecevic (2004), Zecevic et al. (2004). InSiljak and Zecevic (2004), new ideas were also presented forbroadening the scope of control design under decentralizedinformation structure constraints. Both structural andalgebraic features of decentralized feedback are considered,with LMIs as a common tool.
From an application perspective, since boilers are socommon there are many modeling efforts. There are resultsavailable in literature (Bouamama, Medjaher, Samantaray,& Staroswiecki, 2006), which deals with a tool called bondgraph modeling. This can be used to represent the modelstructures of such processes along with their control systeminstrumentation. The structural analysis of this model canbe used to obtain fault signatures and to identify thehardware redundancies in the sensor placement. Forcontrol purpose, there are also black box models ofreasonable complexity that describe the system well inspecific operating conditions (Li, Chen, Marquez, &Gooden, 2006). Since black box models are only valid forspecific operating points, a good nonlinear process model isimportant for model-based control.
In this paper, a new algorithm has been proposed fordesigning dynamic output feedback controllers. An im-portant distinction of this algorithm within the vastliterature on robust control is that the method determinesa linear controller which stabilizes the system, and, at thesame time, maximizes the class of uncertain perturbationswhich can be tolerated by the closed loop system. Theseperturbations may arise within the subsystem itself andalso in the interconnections. Unlike previous work, there isno assumption that all the states are available for feedback(Siljak & Stipanovic, 2000; Siljak et al., 2002), theperturbations satisfy matching conditions (Leitmann,1993), or the LTI part of the nonlinear model is stable(Kokotovic & Arcak, 1999). It is shown that by relaxing
these assumptions, an algorithm can be developed to solvenot only this complex problem, but also to extend itsapplicability to large scale interconnected systems. To thisend, a new approach is presented for designing decentra-lized dynamic output feedback control strategy for largescale systems. It requires no communication between thesubsystem controllers, and also maximizes the interconnec-tion bounds to increase the robustness of the closed loopsystem against uncertain perturbations. In addition to this,the control law guarantees stability of the overall closedloop system when subsystems are disconnected and againconnected in various ways to perform programmed tasks.This attractive feature of connective stability and noadditional requirement of observer design can be a possiblesource of attraction to both theorists and practitioners. Thedesign method has also an added flexibility of accommo-dating various design constraints involving pole place-ments, bounds on nonlinear terms, and the structure ofcontroller matrices, to mention a few. All controllers arelinear; so their implementation is straightforward and bearslow computational cost.The name of the proposed control is robust output
feedback control. The term robust output feedback is onethat requires careful explanation. About 30% of theemergency shutdowns in pressurized water reactor (PWR)plants are caused by poor level control of the steam waterlevel. This is due to the complicated shrink and swelldynamics, which makes the control problem difficult. It isresponsible for a non-minimum phase behavior whichchanges significantly with the operating conditions. In thispaper, the control design is based on the complex nonlinearmodel for steam generation systems (Astrom & Bell, 2000),which captures the key dynamical properties over a wideoperating range. The physical parameters of the model areobtained from Syncrude Canada Ltd. (SCL) integratedenergy facility located in Mildred Lake, Alberta, Canada.The state variables of the model are: the total volume ofwater in the drum ðV wtÞ, the drum pressure (p) whichrepresents the total energy, the steam-mass fraction in theriser ðarÞ which captures the distribution of steam andwater, and the steam volume in the drum ðVsd Þ. Thedeviation of the drum level from its normal operating pointcan be measured by differential pressure transmitter, butthe volume of steam, volume of water and steam-massfraction are not measurable quantities. Moreover, thelinearized system is non-minimum phase and has two polesat the origin (associated with water dynamics and pressuredynamics), which are major sources of interaction,bandwidth limitation and instability. Hence, from anindustrial point of view, there is a need for a controlstrategy which maintains stability and acceptable perfor-mance under normal operating conditions, which is easilyimplementable and which is without the additional cost ofan observer. In a highly nonlinear interconnected systemsuch as the one described here, guaranteeing a satisfactoryperformance over a wide range of operating condition is adifficult task. There is always a disturbance waiting in the

ARTICLE IN PRESSA. Swarnakar et al. / Control Engineering Practice 15 (2007) 639–654 641
wings that will defeat any reasonable control strategy. The6.306MPa header in 280MW Syncrude utility plantexhibits oscillatory modes during sudden load variationsin the system. The load change causes drum pressure to riseor fall abruptly, which also leads to shrinking and swellingin the drum level. The reason can be attributed to thenonlinear characteristics of the plant, and the coupling
effects which originate from overlooking the multivariablenature of the plant. Under deregulation, what is required isa control strategy that will counteract disturbances,maintain the drum level and drum pressure at its set pointand also bring robustness of the system against uncertainnonlinearities and neglected dynamics. The proposedcontrol robustly stabilizes the system by output feedbackin this sense.
This paper uses LMIs as the main tool for the controllerdesign. From a control engineering point of view (Ghaoui& Niculesu, 2000; Skogestad & Postlethwaite, 2005),one of the main advantages of using LMIs is thatthey can be used to solve problems which involve severalmatrix variables, constraints, and, moreover differentstructures can be imposed on these matrix variables (indecentralized control design). Also, they are flexible and itis relatively straightforward to pose a variety of linear,quadratic or nonlinear optimization problems as LMIproblems. This can be done by using the well knownSchur’s complement method, S-procedure, and othervariable transformation techniques. Very often LMImethods can be applied in cases where customary methodseither fail, or struggle to find a solution. Moreover, it ispossible to unite many previous results in a commonframework like m optimal control, multiobjective H2=H1optimization, and robust model predictive control(RMPC), to mention just a few.
The proposed method has a number of advantages,among which the following points can be singled out:
(1)
The control design is devised as a convex optimizationproblem, which is computationally tractable, andguarantees the existence of a solution.(2)
The proposed algorithm is applicable to cases where allthe states are not available for feedback. The controlleris designed without the additional cost of an observer.It also maximizes the class of perturbations that can betolerated by the closed loop system. Moreover, thecontrol law results in a connectively stable system, thusovercoming the barrier of instability caused by suddenstructural perturbations.(3)
Additional pole placement constraints avoid fastcontroller dynamics and greatly influences the transientcharacteristics such as maximum overshoot, fre-quency of oscillatory modes, delay time, rise timeand settling time. This is a crucial step in controllerdesign.(4)
The controller concept is evaluated on a real-worldproblem (utility boiler with natural circulation). Thecontroller is linear; so its implementation is straightfor-ward and cost effective. The control design algo-rithm can also be applied to many other practicalsystems like n interconnected generators with steamvalve control (Siljak et al., 2002), two-link robotmanipulator (Green & Sasiadek, 2004), and twocoupled inverted penduli (Siljak & Stipanovic, 2000),to mention just a few.
The paper is organized as follows. In Section 2, theproblem is precisely stated and the controller parametersare designed: sufficient conditions are provided involvingLMI feasibility problems. The result is then generalized tomultiple interconnected subsystems in Section 3. Theapplication of the proposed control to an industrial utilityboiler with natural circulation is given in Section 4, withparticular attention devoted to the computation of quad-ratic bounds for the nonlinearities. In Section 5, simulationresults are presented, which show the effectiveness of theproposed control against sudden load variations. In allcases, a nonlinear model of the boiler is used, whichcapture the key dynamical properties of risers, downcomersand the boiler drum. Section 5 also includes comparison ofthe proposed LMI design with static and dynamic statefeedback control. Finally, Section 6 makes some conclud-ing remarks.
2. Output feedback stabilization in the LMI framework
Consider a general nonlinear plant (Siljak et al., 2002;Zecevic et al., 2004)
_xðtÞ ¼ AxðtÞ þ BuðtÞ þGh1ðt; xÞ; yðtÞ ¼ CxðtÞ, (1)
where xðtÞ 2 Rn is the state of the system, uðtÞ 2 Rm is theinput vector, yðtÞ 2 Rp is the output vector, A, B and C areconstant n� n and n�m and p� n matrices. h1 :Rnþ1�!Rn is a piecewise continuous nonlinear function
in both arguments t and x, satisfying h1ðt; 0Þ ¼ 0. Thismeans that the origin is the equilibrium point of the system.If this is not the case, then a new system with equilibriumpoint at the origin can be defined by performing a changeof variables. It is assumed that ðA;BÞ is stabilizable, ðC;AÞis detectable and the uncertain term h1ðt;xÞ is boundedby a quadratic inequality (Siljak et al., 2002; Zecevicet al., 2004)
hT1 ðt;xÞh1ðt;xÞpa2xTHT1H1x, (2)
where a40 is a scalar parameter and H1 is a knownconstant matrix. The parameter a can be termedas a degree of robustness, because maximization of aleads to increased robustness of the closed loop systemagainst uncertain perturbations. These perturbationsmay arise due to uncertain structural reconfigurations,changing operating conditions, and load variations.If there exists a dynamic output feedback controller ofthe form
_xkðtÞ ¼ AkxkðtÞ þ BkyðtÞ; uðtÞ ¼ CkxkðtÞ þDkyðtÞ, (3)

ARTICLE IN PRESS
Fig. 1. Region of attraction.
A. Swarnakar et al. / Control Engineering Practice 15 (2007) 639–654642
then the closed loop system can be represented as
_xðtÞ
_xkðtÞ
" #¼
Aþ BDkC BCk
BkC Ak
" #xðtÞ
xkðtÞ
" #
þG
0
" #hðt; ~xÞ,
yðtÞ ¼ ½C 0�xðtÞ
xkðtÞ
" #, ð4Þ
where ~xðtÞ ¼ ½xTðtÞ xTk ðtÞ�T. The nonlinear function hðt; ~xÞ
satisfies
hTðt; ~xÞhðt; ~xÞpa2 ~xTðtÞHT
1H1 0
0 0
" #~xðtÞ
¼ a2 ~xTðtÞHTH ~x, ð5Þ
where HTH ¼ diagðHT1H1; 0Þ, and the closed loop system
can be written as
_~xðtÞ ¼ A ~xðtÞ þG1hðt; ~xÞ; yðtÞ ¼ C ~xðtÞ, (6)
where
A9Aþ BDkC BCk
BkC Ak
" #; C9½C 0�,
G19G
0
" #.
For many practical cases, it is necessary to consider class ofproblems where the nonlinearities in (1) satisfy thegeneralized constraint of the form (Zecevic et al., 2004)
hT1 ðt; xÞh1ðt; xÞpa2xTHTr ðxÞHrðxÞx, (7)
where the elements of in HrðxÞ can be unbounded functionof x, and the only assumption is that there exists a constantmatrix H1 and a region X � Rn such that 0 2 X, and
hT1 ðt; xÞh1ðt; xÞpa2xTHT1H1x; 8x 2 X. (8)
This is also explained with a suitable example in Remark 2.4.As interconnected system is highly nonlinear, Lyapunov’stheorem (Marquez, 2003) can be used to establish theasymptotic stability of origin. The asymptotic stability of (6)can be established by using a Lyapunov function
vð ~xÞ ¼ ~xTP ~x, (9)
minX1 ;Y1 ;A1;B1 ;C1 ;D1 ;g
g
s:tX1 I
I Y1
" #40;
AX1 þ X1ATþ BC1 þ BC1
� �2666664
where P is a symmetric positive definite matrix ðP40Þ andthis allows to define a collection of sets (Zecevic et al.,2004)
pðrÞ ¼ ~x : vð ~xÞpr� �
, (10)
where by denoting the largest set that satisfies pðrÞ � X bypðr0Þ, it now follows that solutions ~xðt; t0; ~x0Þ of (6)originating at ~x0 2 pðr0Þ must remain in the set pðr0Þ atall times. More precisely, ~x0 2 pðr0Þ implies ~xðt; t0; ~x0Þ 2pðr0Þ for all tXt0, and pðr0Þ is an invariant set. In this way,the controller obtained stabilizes the closed loop systemlocally and pðr0Þ can be represented as an estimate of theregion of attraction (Khalil, 2002; Marquez, 2003). This isphysically shown in Fig. 1 for a two-dimensional case, andwith a Lyapunov function vðxÞ ¼ x2
1 þ x22. The radius of the
disk in Fig. 1 can be calculated from the minimum of vðxÞ
at the very edge of the condition x2 ¼ �x2r. Hence, ingeneral, pðr0Þ can be viewed as an ellipsoidal approxima-tion of the domain of attraction inside the set X.The following theorem provides sufficient conditions for
the existence of a stabilizing output feedback controller.
Theorem 2.1. If there exists g, X1, Y1, A1, B1, C1, D1, such
that the following optimization problem is feasible:
T
Aþ AT
1 þ BD1C G X1HT1
Y1Aþ B1Cþ ATY1 þ CTBT1 Y1G HT
1
�I 0
�gI
3777775o0;

ARTICLE IN PRESSA. Swarnakar et al. / Control Engineering Practice 15 (2007) 639–654 643
then the system in (6) is asymptotically stable for all
nonlinearities satisfying the quadratic constraint in (5).
Proof. Please see Appendix.
Corollary 2.1. As vð ~xÞ is radially unbounded, under the
condition of Theorem 2.1, if the quadratic constraint in (5)holds globally ð8x 2 RnÞ, then the system in (6) is globally
stabilized.
Remark 2.1. Assume that the controller KðsÞ ¼
Dk þ CkðsI� AkÞ�1Bk is strictly proper ðDk ¼ 0Þ and that
A does not have any fast mode, i.e., any eigenvalue withlarge real part. Then, from the identity
TraceðAÞ ¼ TraceðAÞ þ TraceðAkÞ,
Ak has fast modes if and only if A has fast modes.Therefore, fast controller dynamics can be prevented byconstraining the closed loop eigenvalues, e.g., in a commonregion of small radius disk and a conic sector for boundingthe maximum overshoot. From an application perspective,this is valuable for real-time digital implementation of thecontroller. One way of simultaneous tuning the stabilityand transient behavior is therefore to combine the aboveLMIs with pole placement objectives. Considering theseissues, and starting from the pole placement constraints ofChilali and Gahinet (1996), some variable transformationsand mathematical calculations show that
F11 þ ð2aminÞX1 F12 þ ð2aminÞI
F22 þ ð2aminÞY1
" #o0;
�onmaxX1 �onmaxI AX1 þ BC1 Aþ BD1C
�onmaxI �onmaxY1 A1 Y1Aþ B1C
�onmaxX1 �onmaxI
�onmaxI �onmaxY1
266664
377775 o0;
D11 D12
D22
" #o0;
where
D11 ¼ D229ðsin yÞF11 ðsin yÞF12
ðsin yÞFT12 ðsin yÞF22
" #,
D129 cos yAX1 þ BC1 � X1A
T� ðBC1Þ
T Aþ BD1C� AT
1
A1 � AT� CTDT
1BT Y1Aþ B1C� AT
1 � CTBT
1
24
35,
and F11, F12, F22 are defined in Appendix (Eq. (58)).These regions are the intersection of three elementary LMIregions: an amin stability region ReðsÞpamin, a disk ofradius onmax and the conic sector Sð0; 0; yÞ. Confining theclosed loop eigenvalues to this region ensures a minimumdecay rate amin, a minimum damping ratio z ¼ cos y, and amaximum undamped natural frequency onmax. This in turnbounds the delay time, the rise time, the maximumovershoot, and the frequency of oscillatory modes.
Remark 2.2. Theorem 2.1 provides only sufficient condi-tions for the solution of controller synthesis problem. Theconservativeness and computational burden of the propo-sed approach strongly depend on the choice of the systemparameterizations and of performance requirements.
Remark 2.3. The number of LMI decision variablesincreases in dynamic controller design. For the static statefeedback, the number of LMI decision variables aren� ðnþ1
2þmÞ, while for the dynamic case this number
increases to n� ð2nþ 1þ pþmÞ þm� p. An increase inthe number of decision variables implies an increase of theoff-line computational effort required to solve the LMIs. Itis worth to notice that the presence of controller dynamicequations also require more on-line computations. As asummary, as far as stability is concerned, state feedbackcontrol offers best possible performance with low compu-tational cost, provided all states are measurable.
Remark 2.4. Dynamic controllers offer additional degreesof freedom compared to static ones. If used appropriately,the additional freedom can lead to increased robustnessproperties. Consider the system (Zecevic et al., 2004)
_x1 ¼ 3x1 þ x1x2 þ x2 þ u,
_x2 ¼ �x1 þ x22 þ u. (11)
It has an unstable equilibrium point at the origin, and anonlinear term h1ðxÞ satisfying
hT1 ðxÞh1ðxÞ ¼ xTx22 0
0 x22
" #x. (12)
The system contains an additional pair of equilibria: anunstable one at ½0:145 � 0:382�T, and a stable one at½6:853 � 2:618�T. The system trajectory is shown in Fig. 2.If a region is selected as
X1 ¼ fx : x1 2 R; jx2jp1g, (13)
then
hT1 ðxÞh1ðxÞpxTx; 8x 2 X1. (14)
Solving the LMI optimization (Theorem 2.1 without poleplacement constraints) using H1 ¼ I gives a ¼ 2:5. Thisshows that the closed loop system remains locally stable forany nonlinearity h1ðxÞ satisfying
hT1 ðxÞh1ðxÞpa2xTHT1H1x ¼ 6:25xTx; 8x 2 X1. (15)
By comparing (14) and (15), it can be concluded that thesystem is capable of tolerating significant nonlinearperturbations in h1ðxÞ, provided that the initial conditionsremain within the set pðr0Þ � X1. However, this is obtainedat the expense of very fast controller dynamics, which isundesirable. By choosing an admissible region Dð4:45;0:707; 6:3Þ of the closed loop eigenvalues, a is calculated tobe 1.781. The closed loop eigenvalues are �4:455þ j4:4545;�4:455� j4:4545;�5:9167þ j0:5413;�5:9167�j0:5413. Forthe same configuration, static state feedback controller

ARTICLE IN PRESS
Fig. 2. System trajectory.
0 0.5 1 1.5 2-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Time [sec]
Sta
te x
1
static state feedbackdynamic state feedbackdynamic output feedback
Fig. 3. State x1 of the system.
0 0.5 1 1.5 2-1.5
-1
-0.5
0
0.5
1
1.5
Time [sec]
Sta
te x
2
static state feedbackdynamic state feedbackdynamic output feedback
Fig. 4. State x2 of the system.
A. Swarnakar et al. / Control Engineering Practice 15 (2007) 639–654644
design (Zecevic et al., 2004) produces a ¼ 1:6, and dynamicoutput feedback design gives a ¼ 1. This implies thatdynamic state feedback control is capable of toleratingmore uncertainty in h1ðxÞ than static control strategy.Figs. 3 and 4 show the dynamics of states for full statefeedback and output feedback control design. Hence, thiscontroller can be applied to cases where all the states arenot available for feedback, and fast controller dynamicscan be prevented by choosing an admissible region in theleft half of the complex plane.
Now consider a larger region X2, defined by
X2 ¼ fx : x1 2 R; jx2jp1:6g. (16)
Here, h1ðxÞ satisfies
hT1 ðxÞh1ðxÞp2:56xTx; 8x 2 X2. (17)
When the LMI optimization is repeated with H1 ¼ 1:6I,a ¼ 1 for static controller and a ¼ 1:14 for dynamiccontroller. Hence, h1ðxÞ satisfies (17) with no margin ofuncertainty in the static case. The number of decisionvariables for the static feedback controller design is2� ð3
2þ 1Þ ¼ 5. For the dynamic controller, this is in-
creased to 2� ð5þ 2þ 1Þ þ 1� 2 ¼ 18 for full state feed-back and 2� ð5þ 1þ 1Þ þ 1� 1 ¼ 15 for outputfeedback. Dynamic controllers have computational com-plexity, but it also offers more physical insight into

ARTICLE IN PRESSA. Swarnakar et al. / Control Engineering Practice 15 (2007) 639–654 645
controller design. An intuitive explanation of this fact isthat the transient behavior of the overall system is affectedconsiderably by a dynamic controller. In real-time im-plementation, the dynamics of the controller filters themeasurement noise, and fast controller dynamics canbe avoided by choosing a disk of smaller radius in thedesign phase.
3. Generalization to multiple interconnected subsystems
From the viewpoint of boilers, robotics, vehicle platoon-ing, it is necessary to extend the preceding analysis tomodels that include decentralized control. To that effect,consider the interconnected system (Siljak et al., 2002;Zecevic et al., 2004)
_xi ¼ Aixi þ Biui þGihiðt;xÞ,
yi ¼ Cixi; i ¼ 1; 2; 3; . . . ; n, ð18Þ
where xi 2 Rni are the states of subsystems, ui 2 Rmi are thecontrol inputs and hi : R
nþ1�!Rni are the interconnec-
tions. It is assumed that pairs ðAi;BiÞ are stabilizable,ðCi;AiÞ are detectable, and all nonlinear functions hiðt;xÞsatisfy the quadratic constraints (Siljak et al., 2002)
hTi ðt; xÞhiðt;xÞpa2i xTHT
i Hix, (19)
where x ¼ ½xT1 xT2 . . . xTn �T, ai40 are interconnection
parameters and Hi are fixed known matrices. Followingthe discussions of the previous section, the closed loopsystem for the ith subsystem (as in (6)) can be written as
_xik ¼ Aclixik þGNi
hi; i ¼ 1; 2; . . . ; n, (20)
where xik ¼ ½xTi xTki�T, xki
represent controller states for theith subsystem and
Acli9
Ai þ BiDkiCi BiCki
BkiCi Aki
" #; GNi
9Gi
0
� �. (21)
Aki, Bki
, Ckiand Dki
are the state space matrices of thecontroller for ith subsystem. Defining xN ¼ ½x
T1 xTk1
xT2 xTk2
. . . xTn xTkn�T, the quadratic inequality of the ith subsystem
(as in (5)) can be rewritten as
hTi ðt; xÞhiðt;xÞpa2i xTHT
i Hix ¼ a2i xTNH
TiNHiNxN , (22)
where the elements of HiN corresponding to xk1,
xk2; . . . ;xkn
are zero. The overall interconnected systemcan be written in compact form as
_xN ¼ ADxN þGDhðt;xN Þ, (23)
where AD ¼ diagðAcl1 ; . . . ; AclnÞ, GD ¼ diagðGN1
; . . . ;GNnÞ
and h ¼ ½hT1 hT2 . . . hTn �T. The nonlinear function of the
overall system hðt;xN Þ is bounded by a quadratic inequality
hTðt; xNÞhðt;xN ÞpxTN
Xn
i¼1
a2i HTiNHiN
!xN
¼ xTN
Xn
i¼1
1
g2iHT
iNHiN
!xN . ð24Þ
The following design algorithm provides sufficient condi-tions for the existence of decentralized controllers for largescale interconnected systems.
Theorem 3.1. If there exists gi, X1i, Y1i
, Ai, Bi, Ci, Di,i ¼ 1; 2; 3; . . . ; n, such that the following optimization pro-
blem is feasible:
minPni¼1
gi;
s:t PT2DYDP2D
40;
PT2DAND
P2DPT
2DGD PT
2DYDH
TN
�I 0
�cDI
264
375 o0;
PT2DAND
P2Dþ 2aminD
PT2DYDP2D
o0;
�onmaxiPT
2iYiP2i
PT2iAcli
YiP2i
�onmaxiPT
2iYiP2i
24
35 o0;
D11iD12i
D22i
" #o0;
where
HTN9½H
T1N; . . . ;HT
nN�,
cD9diagðg1; g2; . . . ; gnÞ,
aminD9diagðamin1 ; amin2 ; . . . ; aminnÞ,
D11i¼ D22i
9 sin yi
ðF11Þi ðF12Þi
ðF21Þi ðF22Þi
" #,
D12i9 cos yiðP
T2iAcli
YiP2i�PT
2iYiA
T
cliP2iÞ,
then the interconnected system in (23) is asymptotically
stable for all nonlinearities satisfying the quadratic con-
straint in (24).
Proof. Please see Appendix.
MinimizingP
gi leads to increasing robustness of theclosed loop system against uncertain structural perturba-tions, changing operating conditions and load fluctuations.This is by recognizing the well known fact that inter-connections can also be considered as perturbations of thesubsystem dynamics.
Corollary 3.1. Under the conditions of Theorem 3.1, if the
quadratic constraint in (24) holds globally ð8x 2 RnÞ, then
the system in (23) is globally stabilized.
Remark 3.1. It is clear that the stability of (23) isguaranteed for any nonlinearity satisfying (24). However,it is important to note that an inherent trade-off existsbetween the size of the region of attraction and therobustness of system. It is true that a large value of ai
implies a greater degree of robustness. On the other hand,it is also true that the value of ai obtained from the LMI

ARTICLE IN PRESSA. Swarnakar et al. / Control Engineering Practice 15 (2007) 639–654646
optimization decreases as the region X becomes larger.Remark 2.4 clearly illustrates this effect.
Remark 3.2. The proposed method guarantees connectivestability of the overall large scale system, i.e., overallstability can be maintained when the subsystems aredisconnected and again connected in various ways toperform programmed tasks. It can be seen that theformulation of the constraints in (24) or (22) on theinterconnection terms hiðt;xÞ includes the case when anyand/or all hiðt;xÞ � 0, guaranteeing that the overall closedloop system in (23) is connectively stable (Siljak, 1991;Siljak & Stipanovic, 2000). This is because hiðt;xÞ � 0implies that the ith subsystem is disconnected, but (24) isstill satisfied and the controller designed based on Theorem3.1 guarantees overall closed loop stability.
Remark 3.3. Due to the requirement of block diagonalLyapunov function in decentralized design, there may beproblems of infeasibility and loss of robustness of theclosed loop system. Moreover, the interior point algorithm,which solves the linear objective minimization problem inMatlab cannot be used for more than 20 matrix variables.
Remark 3.4. The controllers obtained using the LMIoptimization in Theorem 3.1 are computed for normalload operating conditions. However, as ai is maximized,the same controller can be used for a range of operatingconditions. If the system significantly swerves fromnominal operating point, then the performance of thecontroller can be improved by re-evaluating the para-meters. This can be done off-line, based on load forecastand/or contingency studies (Zecevic et al., 2004).
4. Application to an industrial utility boiler
To illustrate how the proposed LMI approach can beapplied to a real-world problem, this section uses anonlinear dynamic model for natural circulation drum-boiler (Astrom & Bell, 2000). The primary reason forselecting this type of control is also the underlying drum-boiler model, which can be bounded in a way thatconforms to inequality (2).
4.1. Physical model
The utility boilers in the plant are water tube drum boilers.This type of boilers usually comprise two separate systems.One system is the steam–water system, which is also called thewater side of the boiler, and the other system is thefuel–air–flue gas system, which is also called the fire side ofthe boiler. A new scheme on advanced combustion controlbased on model predictive control strategy has been recentlydeveloped in Havlena and Findejs (2005). It deals with fireside of the boiler and the emphasis was particularly placed onboiler pressure control with simultaneous air–fuel ratiocoordination. This approach can lead to an increase in boilerefficiency while considerably reducing the production of NOx.
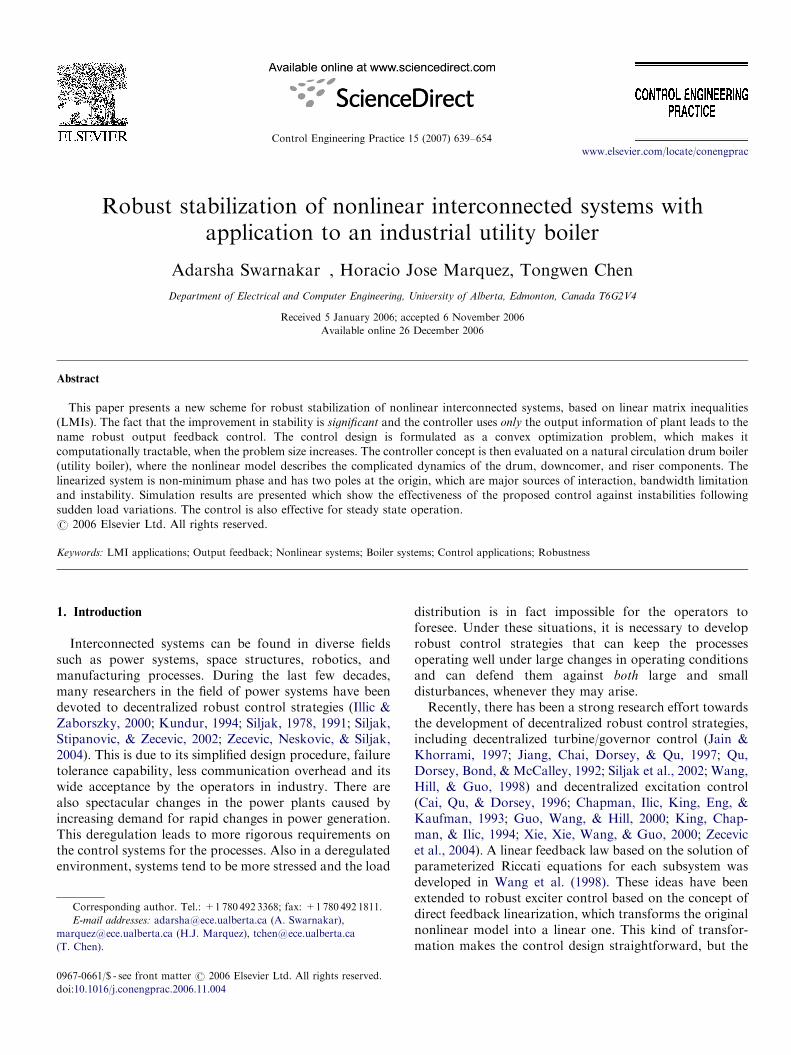
This paper deals with designing a robust control strategyfor water side of the boiler. In the steam–water system,preheated water ðqf Þ from the economizer is fed into thesteam drum, which then flows through the downcomersinto the mud drum. The mud drum distributes the water torisers and the heat Q supplied to risers cause boiling of thewater. Gravity forces the saturated steam to rise, causing acirculation in the riser–drum–downcomer loop. Thesaturated steam ðqsÞ is then separated from the water andexits the steam drum into the primary and secondarysuperheaters. A schematic diagram of Syncrude utilityboiler is shown in Fig. 5. Let V denote the volume, r thespecific density, u the specific internal energy, h the specificenthalpy, t the temperature, p the drum pressure and q themass flow rate. Moreover, let subscripts s, w, f and m referto steam, water, feedwater and metal, respectively. Sub-script t denotes the total steam, d the drum and r the riser.The total mass of the metal tubes and the drum is mt, andthe specific heat of the metal is Cp.The global mass and energy balances are given by
(Astrom & Bell, 2000)
d
dt½rsV st þ rwVwt� ¼ qf � qs, (25)
d
dt½rshsV st þ rwhwV wt � pV t þmtCptm� ¼ Qþ qf hf � qshs,
(26)
where Vst and V wt represents the total steam volume andthe total water volume, respectively. The total volume ofthe boiler drum, downcomers, and risers is Vt ¼ V st þ Vwt.
Riser dynamics: The global mass balance for the risersection can be written as (Astrom & Bell, 2000):
d
dt½rsavVr þ rwð1� avÞV r� ¼ qdc � qr, (27)
where qr is the total mass flow rate out of the risers and qdc
is the total mass flow rate into the risers (downcomer flowrate). V r represents the riser volume and the total amountof the steam in risers is governed by the average volumefraction (Astrom & Bell, 2000):
av ¼1
ar
Z ar
0
f ðxÞdx ¼rw
rw � rs
� 1�rs
ðrw � rsÞar
ln 1þrw � rs
rs
ar
� � �, ð28Þ
where ar is the steam-mass fraction in the riser. Finally, theglobal energy balance for the riser section is given by(Astrom & Bell, 2000)
d
dt½rshsavV r þ rwhwð1� avÞVr � pV r þmrCpts�
¼ Qþ qdchw � ðarhc þ hwÞqr. ð29Þ
Drum dynamics: Let V sd and V wd be the volume of steamand water under the liquid level, and the steam flow ratethrough the liquid surface in the drum be qsd . The massbalance for the steam under the liquid level is governed by
ARTICLE IN PRESS
Economizer
Mud drum
Tangent tube
Steam drum
Feedwater)
(qf )
Risers Downcomers)
(qdc)(qr)
Steam
(qs)
Air from FD fan
Fuel gas/
Natural gas
Q
Waterwall headers
Waterwall headers
Flue gas
Superheaters
Bullnose
Burners
Flue gas
Flue gas
to ID fan
Fig. 5. Utility boiler.
A. Swarnakar et al. / Control Engineering Practice 15 (2007) 639–654 647
(Astrom & Bell, 2000)
d
dtðrsV sd Þ ¼ arqr � qsd � qcd , (30)
where qcd is the condensation flow which can be expressedas
qcd ¼hw � hf
hc
qf þ1
hc
rsVsd
dhs
dtþ rwVwd
dhw
dt
�
�ðVsd þ Vwd Þdp
dtþmdCp
dts
dt
.
The empirical model of qsd is represented by (Astrom &Bell, 2000)
qsd ¼rs
Td
ðVsd � V0sd Þ þ arqdc þ arbðqdc � qrÞ, (31)
where V 0sd denotes the volume of steam in the drum in the
hypothetical situation, when there is no condensation ofsteam in the drum and Td is the residence time of the steamin the drum. The constant b is user defined and isapproximately 0:3.
4.2. Simplification of the nonlinear model to standard form
In this section, the conversion of the nonlinear modelgiven by (25)–(27), (29) and (30) to the form in (1) has beencarried out. The state variables of the system are: totalwater volume (V wt ¼ x1), drum pressure (p ¼ x2), steam-mass fraction in the riser (ar ¼ x3), and steam volume inthe drum (V sd ¼ x4). The control variables are feedwaterflow rate (qf ¼ u1), steam flow rate (qs ¼ u2) and the heatsupplied to the risers (Q ¼ u3). From (25), straightforward
calculation shows that
d
dt½rsðVt � x1Þ þ rwx1� ¼ u1 � u2,
ðrw � rsÞdx1
dtþ ðVt � x1Þ
qrs
qx2
� �dx2
dt¼ u1 � u2,
e11dx1
dtþ e12
dx2
dt¼ u1 � u2, (32)
where e11 ¼ rw � rs and e12 ¼ x1qrw
qx2þ ðV t � x1Þ
qrs
qx2. Simi-
larly, from (26)
d
dt½rshsðVt � x1Þ þ rwhwx1 � x2Vt þmtCptm�
¼ u3 þ u1hf � u2hs,
ðrwhw � rshsÞdx1
dtþ ðV t � x1Þhs
qrs
qx2þ ðV t � x1Þrs
qhs
qx2
� �dx2
dt
þ x1 hw
qrw
qx2þ rw
qhw
qx2
� �dx2
dt� Vt
dx2
dtþmtCp
qtm
qx2
dx2
dt
¼ u3 þ u1hf � u2hs,
e21dx1
dtþ e22
dx2
dt¼ u3 þ u1hf � u2hs, (33)
where e21 ¼ rwhw � rshs and e22 ¼ x1ðhwqrw
qx2þ rw
qhw
qx2Þ � Vt
þmtCpqtm
qx2þ ðV t � x1Þðhs
qrs
qx2þ rs
qhs
qx2Þ. Following along the
same lines, multiplying (27) by ðx3hc þ hwÞ and subtracting(29) from (27)
e32dx2
dtþ e33
dx3
dt¼ u3 � x3hcqdc, (34)

ARTICLE IN PRESSA. Swarnakar et al. / Control Engineering Practice 15 (2007) 639–654648
where
e32 ¼ rw
qhw
qx2� x3hc
qrw
qx2
� ð1� avÞV r � V r
þ ð1� x3Þhc
qrs
qx2þ rs
qhs
qx2
�
avV r þmrCp
qts
qx2,
e33 ¼ ðð1� x3Þrs þ x3rwÞhcVr
qav
qx3. (35)
Finally, the drum dynamics is governed by
e43dx3
dtþ e44
dx4
dt¼
rs
Td
ðV0sd � x4Þ þ
hf � hw
hc
u1, (36)
where hc ¼ hs � hw, e44 ¼ rs, and e43 ¼ 1:3x3ðrs � rwÞ
Vrqav
qx3. Starting from the nonlinear equations (32)–(34),
and (36), some mathematical calculations and simplifica-tions give
_x1 ¼ðe22 � e12hf Þu1 þ ðe12hs � e22Þu2 � e12u3
e11e22 � e12e21,
e22 � e12hf
e11e22 � e12e21
� �X 0
e12hs � e22
e11e22 � e12e21
� �X 0
�e12
e11e22 � e12e21
� �X0
e11hf � e21
e11e22 � e12e21
� �X 0
e21 � e11hs
e11e22 � e12e21
� �X 0
e11
e11e22 � e12e21
� �X0
e21e32 � e11e32hf
ðe11e22 � e12e21Þe33
� �X 0
e11e32hs � e21e32
ðe11e22 � e12e21Þe33
� �X0
e11e22 � e12e21
ðe11e22 � e12e21Þe33
� �X 0
ðhf � hwÞðe11e22 � e12e21Þe33 � e21e32e43hc
ðe11e22 � e12e21Þe33e44hc
� �X0
e21e32e43
ðe11e22 � e12e21Þe33e44
� �X 0
�e43
e33e44
� �X0
266666666666664
377777777777775.
Table 1
Parameters of the nonlinear model at a saturation pressure of 7018.6 kPa
ts hw hs rw rsqhw
qx2
qhs
qx2
qrw
qx2
qrs
qx2
qts
qx2
285.9 1267.8 2772.3 739.9 36.6 51.9 �13:3 �18:1 5.9 11.53
_x2 ¼ðe11hf � e21Þu1 þ ðe21 � e11hsÞu2 þ e11u3
e11e22 � e12e21,
_x3 ¼ �hcqdcx3
e33þ
e21e32 � e11e32hf
e11e22e33 � e12e21e33u1
þðe11e32hs � e21e32Þu2 þ ðe11e22 � e12e21Þu3
e11e22e33 � e12e21e33,
_x4 ¼e43hcqdcx3
e33e44�
rsx4
Tde44þ
rsV0sd
e44Td
þe21e32e43u2
ðe11e22 � e12e21Þe33e44�
e43u3
e33e44
þðhf � hwÞðe11e22 � e12e21Þe33 � e21e32e43hc
ðe11e22 � e12e21Þe33e44hc
u1. ð37Þ
For Syncrude utility plant, some parameters of thisnonlinear model are obtained from steam table at asaturation pressure of 7018:6 kPa. The steam tables areapproximated by quadratic functions, and the parametersare shown in Table 1. At steady state, u1 ¼ u2 ¼ 58 in pu,
u3 ¼ 84 in pu, x1 ¼ V wt ¼ 57:5m3, x2¼p ¼ 7018 kPa, x3 ¼
ar ¼ 0:05, x4 ¼ Vsd ¼ 5m3, and total volume of water and
steam Vt ¼ 85m3. The construction parameters of thenonlinear model are: riser volume (Vr), downcomervolume (Vdc), drum area (Ad), total metal mass (mt) andmass of the riser (mr).The parameters e11; e12; . . . ; e43 are the functions of states
x1; . . . ; x4, and the properties of steam and water, namely,specific enthalpy, specific density, etc. However, they arenot functions of u1, u2, and u3. This provides an advantageof bringing the nonlinear model in the form of (1). Thefollowing expansion brings the model in the standard form:
_x ¼ ½fðx; uÞ�X0þ
qfqx
� �X0
ðx� x0Þ þ1
2!
q2fqx2
� �X 0
�ðx� x0Þ2þ � � � þ
qfqu
� �X0
�ðu� u0Þ þ1
2!
q2fqu2
� �X0
ðu� u0Þ2þ � � � , ð38Þ
where X 0 represents the equilibrium values, xT ¼
½xT1 xT
2 xT3 xT
4 �, and uT ¼ ½uT1 uT
2 uT3 �. The Taylor series expan-
sion in (38) gives the following input matrix B:
This is calculated from ½qfqu �X0. Moreover, as none of the
terms e11; e12; . . . ; e43 are functions of u1, u2, and u3,
½q2f
qu2 �X0¼ ½q
3fqu3 �X 0
¼ � � � ¼ 0. Similarly, state matrix A matrix
in (1) can be calculated from ½qfqx �X 0.With Dx ¼ ðx� x0Þ,
(38) can be expressed as
D _x ¼qfqx
� �X0|fflfflffl{zfflfflffl}
A
Dxþqfqu
� �X 0|fflfflffl{zfflfflffl}
B
Du
þ1
2!
q2fqx2
� �X 0
Dx2 þ1
3!
q2fqx3
� �X0
Dx3 þ � � �|fflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflffl{zfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflffl}h1ðDxÞ
,

ARTICLE IN PRESS
Pole-Zero Map
Real Axis
Ima
g A
xis
-0.1 -0.08 -0.06 -0.04 -0.02 0 0.02 0.04 0.06 0.08 0.1
-1
-0.8
-0.6
-0.4
0.2
0
0.2
0.4
0.6
0.8
1
pole zero
Fig. 6. PZ map of the linearized model.
A. Swarnakar et al. / Control Engineering Practice 15 (2007) 639–654 649
with G as the identity matrix. Starting from (28), somecalculations show that
qav
qx3¼
rw
2rs
ð1þ x3Þrs � rwx3
ð1� x3Þrs þ rwx3
� �. (39)
Hence, from (37)
�hcqdcx3
e33¼ �
2rsqdcx3
V rrw½rs þ x3ðrs � rwÞ�
¼ �2rsqdcx3
V rrw½rs þ x3ðrs � rwÞ�
� �X0
�2rsqdc
V rrw½rs þ x3ðrs � rwÞ�
�
þ2rsx3qdcðrs � rwÞ
Vrrw½rs þ x3ðrs � rwÞ�2
�X 0
nx3
þ2rsqdcðrs � rwÞ
V rrw½rs þ x3ðrs � rwÞ�2
�
� 1�x3ðrs � rwÞ
½rs þ x3ðrs � rwÞ�
� ��X0
nx23. ð40Þ
Also, �rsx4
Td e44¼ �
x4
Td, and
e43hcqdcx3
e33e44¼
qdcx3
rs
1:3ðrs � rwÞx3
½rs þ x3ðrs � rwÞ�
� �
¼qdcx3
rs
1:3ðrs � rwÞx3
½rs þ x3ðrs � rwÞ�
� �� �X0
þqdcx2
3
rs
1:3ðrs � rwÞ2
½rs þ x3ðrs � rwÞ�2
� ��
þqdcx3
rs
2:6ðrs � rwÞ
½rs þ x3ðrs � rwÞ�
� ��X0
nx3
þ1:3ðrs � rwÞqdc
rs½ð1� x3Þrs þ x3rw�
�
1þx3ðrs � rwÞ
½ð1� x3Þrs þ x3rw�
�
þx23ðrs � rwÞ
2
½ð1� x3Þrs þ x3rw�2
��X0
nx23. ð41Þ
The higher order terms can be neglected as the variation ofsteam-mass fraction from the normal operating point is5–6%. In real-time application, the measured variables ofthe utility boiler are drum pressure (y1 ¼ x2) and drumlevel y2, where the drum level measured from its normaloperating level is given by (Astrom & Bell, 2000)
y2 ¼ ðV wd þ V sdÞ=Ad ¼ lw þ ls. (42)
The term lw represents level variations caused by changesof the amount of water and ls represents variations causedby the steam in the drum. V dc represents the downcomervolume and the water volume V wd is governed by
V wd ¼ V wt � V dc � ð1� avÞVr. (43)
With some simplifications, the output vector y can beobtained as
y1
y2
" #¼
0 1 0 0
1
Ad
01
Ad
rw
2rs
ð1þ x3Þrs � rwx3
ð1� x3Þrs þ rwx3
� �� �X 0
1
Ad
264
375
�
Dx1
Dx2
Dx3
Dx4
2666664
3777775. ð44Þ
4.3. Computation of quadratic bounds for the nonlinearities
The pole zero (PZ) map of the linearized system is shownin Fig. 6. It has two poles at origin and it contains a RHPzero at 0:021. These are sources of interaction, bandwidthlimitation and instability. It has been found that othernonlinear terms obtained by Taylor’s expansion of (37) arevery small compared to (40) and (41). Therefore, they areneglected while computing the quadratic bounds fornonlinearities. As the steam-mass fraction is always lessthan 100%, a region X is defined as
X ¼ fx : x1;x2;x4 2 R; jx3jp1g. (45)
Using (45), (40) and (41), it can be verified that thenonlinear function h1ðxÞ is bounded by
hT1 ðxÞh1ðxÞp1:3ðrs � rwÞqdc
rs½ð1� x3Þrs þ x3rw�1þ
x3ðrs � rwÞ
½ð1� x3Þrs þ x3rw�
��
þx23ðrs � rwÞ
2
½ð1� x3Þrs þ x3rw�2
��2X0
nx23

ARTICLE IN PRESS
h(x)
x
αH
−αH
Fig. 7. Physical interpretation of the quadratic inequality.
min
r = 30
θ = 45˚
α
Fig. 8. Admissibility region.
0 20 40 60 80 100 1207.01
7.51
8.01
8.51
Time [sec]
Pressure Dynamics
dynamic output feedbackstatic state feedbackdynamic state feedback
0 20 40 60 80 100 120
4.4
4.6
4.8
5.0
5.2
Time [sec]
static state feedbackdynamic state feedbackdynamic output feedback
Pre
ssure
p (
MP
a)
Volu
me V
sd (
m3)
Fig. 9. Stabilizing effect of controllers.
A. Swarnakar et al. / Control Engineering Practice 15 (2007) 639–654650
þ2rsqdcðrs � rwÞ
Vrrw½rs þ x3ðrs � rwÞ�2
�
1�x3ðrs � rwÞ
½rs þ x3ðrs � rwÞ�
� ��2X0
nx23, ð46Þ
It should be noted at this point that the bound in (46)reflects the pre-fault state of the system and the nominalload values. With that in mind, the objective of LMI-basedcontrol is to maximize parameter a so that inequality
hT1 ðt; xÞh1ðt; xÞpa2xTHT1H1x (47)
holds for a variety of operating conditions and loadvariations. The physical interpretation of this inequality isshown in Fig. 7 for one-dimensional case and for nominalload condition. The shaded region (�aH1xph1ðxÞpaH1x)increases as a is maximized.
5. Simulation results
The controller is designed by solving the linear objectiveminimization problem of Theorem 2.1. The admissibilityregion is assumed to be Dðamin ¼ 0:01; z ¼ 0:707;onmax
¼ 30Þ, and is shown in Fig. 8 by a P shaped region of theleft-half plane (LHP).
The original system has two poles at the origin, oneassociated with water dynamics and the other with pressuredynamics. The pole associated with pressure dynamics is atthe origin because the steam flow is chosen as a controlvariable. The stabilizing effects of three different kinds ofcontrollers, static state feedback, dynamic state feedbackand dynamic output feedback, are shown in Figs. 9 and 10.The degrees of robustness a obtained with static statefeedback, dynamic state feedback and dynamic outputfeedback controllers are 1:16, 1:28 and 1:04, respectively.This shows that the degree of robustness with outputfeedback is less than full state feedback. However, the
performance is acceptable. Fig. 11 shows the disturbancerejection capability of the output feedback controllercaused by sudden load variation in the system. Due tosudden decrease in load, the pressure in the drum rises,which increases the volume of water due to increasedcondensation. Steam quality ar at the riser outlet alsoincreases rapidly. The volume of the steam V sd decreasesdue to the increased pressure which causes condensation ofthe steam. This shows that there exists a strong interactionbetween different state variables. The time scale also showsthe effect of RHP zero which limits the closed loopbandwidth. The controller is also capable of attenuatingthe effect of sudden increase in load. Pole placementconstraints help to reduce the initial peaking caused byload variations.

ARTICLE IN PRESS
100 150 200 250 300
7.018
7.518
8.018Disturbance rejection
100 150 200 250 300
0.05
0.10
0.15
Ste
am
qualit
y (
ar)
100 150 200 250 3004.0
4.5
5.0
Time [sec]
Volu
me V
sd (
m3)
Pre
ssure
p (
MP
a)
Fig. 11. Effect of load variation.
140 160 180 200 220 240
3.8
4.0
4.2
4.4
4.6
4.8
5.0
Time [sec]
Vo
lum
e V
sd
(m
3)
Volume of steam in drum (Vsd)
Td = 12 secTd = 10 secTd = 15 sec
Fig. 12. Volume of steam in the drum for three randomly chosen set
of Td .
0 20 40 60 80 100 1200.050
0.055
0.060
0.065
0.070
0.075
Time (sec)
Ste
am
qu
alit
y a
r
static state feedbackdynamic state feedbackdynamic output feedback
0 20 40 60 80 100 120
56.5
57.0
57.5
58.0
58.5
59.0
Total water volume
Time (sec)
Vo
lum
e V
wt
(m3)
static state feedbackdynamic state feedbackdynamic output feedback
Fig. 10. Stabilizing effect of controllers.
A. Swarnakar et al. / Control Engineering Practice 15 (2007) 639–654 651
It should be noted that the control design does notconsider uncertainties in the A matrix (Aþ DA), and thenominal controller is obtained with residence time of steamin the drum Td ¼ 12 s. To evaluate the robustness of theproposed control with respect to this time constant, anadditional set of simulations are performed with 10pTd
p15. Three representative responses are shown in Fig. 12,corresponding to sudden load variation. The resultssuggest that the proposed control performs well for theentire range of realistic values for Td .
For a complete evaluation of the proposed control, it isalso necessary to consider its practical implementation. Itcan be argued, for example, that the size and inertia of
steam valves make it difficult to implement a control that isfast enough to maintain stability following a sudden loadchange (Siljak et al., 2002). In view of that, the LMI-baseddesign along with pole placement constraints avoid fastcontroller dynamics and can be useful in this context.However, it should be stressed that to achieve a goodperformance, the choice of an appropriate amin stabilityregion, ReðsÞpamin, a disk of radius onmax, and the conicsector Sð0; 0; yÞ has to be done very carefully and severalattempts are needed if the exact region of closed loopeigenvalues are not known a priori.
6. Conclusions
This paper presents a new method of designing adynamic output feedback control strategy for nonlinearinterconnected systems, based on LMIs. The contributionof the paper stems from applicability of the approach tosystems, where all the states are not available for feedback.The primary reason for selecting this type of control is alsothe underlying system model, which is seen to adapt to therequirements of LMI optimization. It is useful to knowthat the LMI formulation maximizes the interconnectionbounds, thereby increasing the robustness of the closedloop system against uncertain perturbations. In addition tothis, the control law results in a connectively stable system,thus overcoming the barrier of instability caused by suddenstructural perturbations.Simulation results show that the output feedback
controller can also achieve good performance, but thedegree of robustness is less than the static or dynamic statefeedback control. However, the stabilization effect of thecontroller is good both during the normal and perturbedconditions, which makes it practically implementable. Theproposed approach can also control the transient char-acteristic of the closed loop system by pole placement

ARTICLE IN PRESSA. Swarnakar et al. / Control Engineering Practice 15 (2007) 639–654652
constraints. This helps in reducing the initial peakingcaused by load variations and avoiding very fast controllerdynamics.
Current work is concentrated on developing a theoreticalframework that leads to the movement of the poleassociated with the pressure dynamics to the LHP. Theintegration of turbine and governor models with thepresent configuration will be done and the design ofdecentralized reduced order controllers for each individualsubsystem will be investigated. Preliminary results obtainedalong these lines are encouraging.
Acknowledgments
This research is supported by Syncrude Canada Inc. andthe Natural Sciences and Engineering Research Council ofCanada (NSERC), through the Collaborative Research and
Development program. The authors would like to thank theanonymous reviewers for their constructive comments andvaluable suggestions.
Appendix
S-procedure (Boyd et al., 1994): The S-procedure is atechnique which enables control engineers to combineseveral quadratic inequalities into one single inequality.There are many situations in control engineering where it isnecessary to ensure that a single quadratic function of x 2Rn is such that (Skogestad & Postlethwaite, 2005)
F0ðxÞo0; F0ðxÞ9xTA0xþ 2b0xþ c0, (48)
whenever certain other quadratic functions are positivesemi-definite, i.e.,
FiðxÞX0; FiðxÞ9xTAixþ 2bixþ ci; i 2 f1; 2; � � � ; qg.
(49)
Now, consider the case i ¼ 1 for simplicity. Hence, it isnecessary to ensure that F0ðxÞo0 for all x such thatF1ðxÞX0. In this case, if there exists a positive scalar, t40,such that FaugðxÞ9F0ðxÞ þ tF1ðxÞo0; 8x subject toF1ðxÞX0, then the goal is automatically achieved.
Proof of Theorem 2.1. It is well known that a sufficientcondition of the asymptotic stability of origin is the deri-vative of vð ~xÞ to be negative along the solutions of (6). Thiscondition can be expressed by a pair of inequalities
P40; and
~xTATP ~xþ hTGT
1P ~xþ ~xTPA ~xþ ~xTPG1ho0. ð50Þ
The S-procedure (Boyd et al., 1994) implies that when (5) issatisfied, condition (50) is equivalent to the existence ofmatrix P and a number t40 such that P40 and
ATPþ PAþ ta2HTH PG1
GT1P �tI
" #o0. (51)
It is again equivalent to the existence of matrix Y whichsatisfies
Y40, (52)
AYþ YAT
G1 YHT
GT1 �I 0
HY 0 �gI
2664
3775o0, (53)
where Y ¼ tP�1 and g ¼ 1a2. It is well known that a can be
termed as degree of robustness; therefore, g is a measure ofthe degree of robustness. The LMI in (52) and (53) cannotbe used to find the controller because it is not affine incontroller parameters Ak, Bk, Ck and Dk. Hence a variabletransformation is necessary. If A and Ak are n� n andnk � nk, partitioning Y and Y�1 as
Y ¼X1 M1
MT1 V1
" #; Y�1 ¼
Y1 N1
NT1 U1
" #, (54)
where X1 and Y1 are n� n and symmetric, M1 and N1 aren� nk and Y40 implies X140, Y140. From Y�1Y ¼ I, itcan be inferred that
Y�1X1
MT1
" #¼
I
0
� �,
which leads to Y�1P1 ¼ P2, where,
P19X1 I
MT1 0
" #; P29
Y1 N1
NT1 U1
" #X1 I
MT1 0
" #¼
I Y1
0 NT1
" #.
(55)
Pre- and post-multiplying (52) by PT2 and P2, respectively,
and (53) by diagðPT2 ; I; IÞ and diagðP2; I; IÞ, respectively,
PT2YP240,
PT2 AYP2 þPT
2YATP2 PT
2G1 PT2YH
T
GT1P2 �I 0
HYP2 0 �gI
2664
3775o0. (56)
Now, straightforward calculation shows that
PT2YP2 ¼
X1 I
I Y1
" #and
PT2 AYP2 ¼
AX1 þ BC1 Aþ BD1C
A1 Y1Aþ B1C
" #,
where
A19YT1 ðAþ BDkCÞX1 þN1BkCX1 þ YT
1BCkMT1 þN1AkM
T1 ,
B19Y1BDk þN1Bk; C19DkCX1 þ CkMT1 ; D19Dk.
(57)

ARTICLE IN PRESSA. Swarnakar et al. / Control Engineering Practice 15 (2007) 639–654 653
Hence,
PT2 AYP2 þPT
2YATP2 ¼
F11 F12
FT12 F22
" #,
where
F119AX1 þ X1ATþ BC1 þ ðBC1Þ
T; F129Aþ AT
1 þ BD1C,
F229Y1Aþ B1Cþ ATY1 þ CTBT
1 . (58)
Also,
PT2G1 ¼
I 0
YT1 N1
" #G
0
� �¼
G
Y1G
" #and
PT2YH
T ¼ PT1H
T ¼X1 M1
I 0
� �HT
1
0
" #¼
X1HT1
HT1
" #.
This variable transformation makes the LMI in (52) and(53) affine in controller parameters. Since X1 and Y1 aresymmetric matrices, N1 and M1 can be chosen square andnon-singular such that N1M
T1 ¼ I� Y1X1. Now, singular
value decomposition gives
½RKUT� ¼ svdðI� Y1X1Þ.
Therefore, N1 and M1 can be calculated as
N1MT1 ¼ RKUT; N1 ¼ RK1=2; M1 ¼ UK1=2. (59)
This allows to calculate Ak, Bk, Ck and Dk from (57):
Dk ¼ D1,
Ck ¼ ðC1 � D1CX1ÞðMT1 Þ�1,
Bk ¼ ðN1Þ�1ðB1 � Y1BD1Þ,
Ak ¼ ðN1Þ�1ðA1 � Y1AX1 � Y1BC1
�N1BkCX1ÞðMT1 Þ�1: &
Proof of Theorem 3.1. The mathematical treatment followsalong the same lines as in Theorem 2.1. From (52) and (53),it is easy to say that the sufficient conditions of the closedloop system in (23) to be asymptotically stable under thequadratic constraint in (24) are
YD40, (60)
ADYD þ YDAT
D GD YDHTN
�I 0
�gDI
2664
3775o0. (61)
Similar to Theorem 2.1, defining new variables as in (54)and (55),
Yi9X1i
Mi
MTi Vi
" #; Y�1i 9
Y1iNi
NTi Ui
" #; P2i
9I Y1i
0 NTi
" #,
Ai9YT1iðAi þ BiDki
CiÞX1iþNiBki
CiX1i
þ YT1iBiCki
MTi þNiAki
MTi ,
Bi9Y1iBiDki
þNiBki; Ci9Dki
CiX1iþ Cki
MTi ,
Di9Dki, ð62Þ
where X1iand Y1i
are ni � ni and symmetric matrices, Mi
and Ni are ni � nkiand Yi40 implies X1i
40, Y1i40.
Hence, for the overall system
YD ¼ diagðY1;Y2; . . . ;YnÞ; P2D¼ diagðP21 ;P22 ; . . . ;P2n
Þ,
and straightforward calculation shows that
PT2DYDP2D
¼ diagX11 I
I Y11
" #; . . . ;
X1nI
I Y1n
" # !,
PT2DGD ¼ diag
G1
Y11G1
" #; . . . ;
Gn
Y1nGn
" # !,
PT2iAcli
YiP2i¼
AiX1iþ BiCi Ai þ BiDiCi
Ai Y1iAi þ BiCi
" #,
PT2DAND
P2D
¼ diagðF11Þ1 ðF12Þ1
ðF11ÞT1 ðF22Þ1
" #; . . . ;
ðF11Þn ðF12Þn
ðF12ÞTn ðF22Þn
" # !,
where
AND9ðADYD þ YDA
T
DÞ,
ðF11Þi9AiX1iþ X1i
ATi þ BiCi þ ðBiCiÞ
T,
ðF12Þi9Ai þ AT
i þ BiDiCi,
ðF22Þi9Y1iAi þ BiCi þ AT
i Y1iþ CT
i BT
i .
Pre- and post-multiplying (60) by PT2D
and P2D, respec-
tively, and (61) by diagðPT2D; I; IÞ and diagðP2D
; I; IÞ,respectively, and adding pole placement constraints, theresult follows. &
References
Astrom, K. J., & Bell, R. D. (2000). Drum-boiler dynamics. Automatica,
36(3), 363–378.
Bouamama, B. O., Medjaher, K., Samantaray, A. K., & Staroswiecki, M.
(2006). Supervision of an industrial steam generator. Part 1: Bond
graph modelling. Control Engineering Practice, 14(1), 71–83.
Boyd, S., Ghaoni, L. E., Feron, E., & Balakrishnan, V. (1994). Linear
matrix inequalities in system and control theory. Philadelphia, PA:
SIAM.
Cai, H., Qu, Z., & Dorsey, J. (1996). Robust decentralized excitation
control for large scale power systems. In Proceedings of 13th IFAC
congress (Vol. 3, pp. 217–222), San Fransisco.
Cai, H., Qu, Z., Gan, D., & Dorsey, J. (2000). A comparison and
simulation study of nonlinearily designed robust controllers for power
system transient stability. International Journal of Electrical Power and
Energy System, 22(1), 15–28.

ARTICLE IN PRESSA. Swarnakar et al. / Control Engineering Practice 15 (2007) 639–654654
Chapman, J., Ilic, M., King, D., Eng, C., & Kaufman, H. (1993).
Stabilizing a multimachine power system via decentralized feedback
linearizing excitation control. IEEE Transactions on Power Systems,
8(3), 830–839.
Chilali, M., & Gahinet, P. (1996). H1 design with pole placement
constraints: An LMI approach. IEEE Transactions on Automatic
Control, 41(3), 358–367.
Ghaoui, L. E., & Niculesu, S. (2000). Advances in linear matrix matrix
inequalities methods in control. Philadelphia, PA: SIAM.
Green, A., & Sasiadek, J. Z. (2004). Dynamics and trajectory tracking
control of a two-link robot manipulator. Journal of Vibration and
Control, 10(10), 1415–1440.
Guo, G., Wang, Y., & Hill, D. (2000). Nonlinear output stabilization
control for multimachine power systems. IEEE Transactions on
Circuits and Systems, 47(1), 46–53.
Havlena, V., & Findejs, J. (2005). Application of model predictive control
to advanced combustion control. Control Engineering Practice, 13(6),
671–680.
Illic, M., & Zaborszky, J. (2000). Dynamics and control of large electric
power systems. New York: Wiley.
Jain, S., & Khorrami, F. (1997). Robust decentralized control of power
system utilizing only swing angle measurements. International Journal
of Control, 66(4), 581–601.
Jiang, H., Chai, H., Dorsey, J., & Qu, Z. (1997). Toward a globally robust
decentralized control for large scale power systems. IEEE Transactions
on Control Systems Technology, 5(3), 309–319.
Khalil, H. K. (2002). Nonlinear systems. Englewood Cliffs, NJ: Prentice-
Hall.
King, C., Chapman, J., & Ilic, M. (1994). Feedback linearizing excitation
control on a full-scale power system model. IEEE Transacations on
Power System, 9(2), 1102–1109.
Kokotovic, P., & Arcak, M. (1999). Constructive nonlinear control:
Progress in the 90s. In Proceedings of 14th IFAC world congress (pp.
49–77). Beijing, P.R. China.
Kundur, P. (1994). Power system stability and control. New York: Mc
GrawHill.
Leitmann, G. (1993). On one approach to the control of uncertain
systems. Journal of Dynamic Systems, Measurement and Control, 115,
373–380.
Li, D., Chen, T., Marquez, H. J., & Gooden, R. K. (2006). Life extending
control of boiler–turbine systems via model predictive methods.
Control Engineering Practice, 14(4), 319–326.
Marquez, H. J. (2003). Nonlinear control systems: Analysis and design.
Canada: Wiley-Interscience.
Qu, Z., Dorsey, J., Bond, J., & McCalley, J. (1992). Application of robust
control to sustained oscillations in power systems. IEEE Transactions
on Circuits and Systems, 39(6), 470–476.
Siljak, D. D. (1978). Large-scale dynamic systems: Stability and structure.
New York: North-Holland.
Siljak, D. D. (1991). Decentralized control of complex systems. Boston:
Academic Publisher.
Siljak, D. D., Stipanovic, D. M., & Zecevic, A. I. (2002). Robust
decentralized turbine/governor control using linear matrix inequalities.
IEEE Transactions on Power Systems, 17(3), 715–722.
Siljak, D. D., & Stipanovic, D. M. (2000). Robust stabilization of
nonlinear systems: The lmi approach. Mathematical Problems in
Engineering, 6(5), 461–493.
Siljak, D. D., & Zecevic, A. I. (2004). Control of large-scale systems:
Beyond decentralized feedback. In 10th IFAC symposium on large scale
systems (pp. 1–10). Osaka, Japan.
Skogestad, S., & Postlethwaite, I. (2005). Multivariable feedback control.
New York: Wiley.
Wang, Y., Hill, D., & Guo, G. (1998). Robust decentralized control for
multimachine power systems. IEEE Transactions on Circuits and
Systems, 45(3), 271–279.
Xie, S., Xie, L., Wang, Y., & Guo, G. (2000). Decentralized control
of multimachine power systems with guaranteed performance.
IEE Proceedings—Control Theory and Applications, 147(3),
355–365.
Zecevic, A. I., Neskovic, G., & Siljak, D. D. (2004). Robust decentralized
exciter control with linear feedback. IEEE Transactions on Power
Systems, 19(2), 1096–1103.