robotic and sensors robotic ii - tuhh · as space exploration, cleaning floors, mowing lawns, and...
TRANSCRIPT

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.1 10.10.2014
Robotic I Robotic and Sensors
Robotic II Machine Vision
and
System Calibration
PD Dr.-Ing. habil. Jörg Wollnack
Technical University Hamburg-Harburg
E-Mail: [email protected]
Internet: www.tu-harburg.de/ft2/wo

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.2 10.10.2014
Contents
Robotic I
Applikation
Modeling
Introduction and History

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.3 10.10.2014
• What is a robot?
• Why use robots?
• Robot History?
• Robot Applications?
Introduction

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.4 10.10.2014
Origin of the word Robot
• Czech word ”robota“ – labor
”robotnik“ – workman
• 1923 play by Karel Capek – Rossum‘s Universal Robots
What a Robot?

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.5 10.10.2014
Definitions
• An automatic device that performs function ordinarily ascribe to
human beings (Webster’s Dictionary)
• An industrial robot is an automatic, servo controlled freely
programmable, multipurpose manipulator with several axes,
for the handling of work pieces, tools or special devices. Variable
programmed operations make the executions of a multiplicity of
tasks possible (International Standards Organization, ISO)
What a Robot?

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.6 10.10.2014
T 800 C3-PO
R2-D2
What a Robot?

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.7 10.10.2014
What a Robot?
To qualify a machine as a robot, it must be able to:
• Sensing and perception: get information from its surroundings
• Carry out different tasks: Locomotion or manipulation, do
something physical – such as move or manipulate objects
• Re-programmable: can do different things
• Function autonomously and/or interact with human beings

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.8 10.10.2014
Types of Robots I
Gripper
Industrial Robots Mobile Robots

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.9 10.10.2014
Types of Robots II
Aerial Robots Wheeled mobile
Robots Legged Robots
Humanoid Robots Underwater
Robots
hybrid

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.10 10.10.2014
NASA and JPL, Mars exploration
Types of Robots III

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.11 10.10.2014
Autonomous Robots
Flying Robot Goal: To develop a
vision-guided robot helicopter which
can autonomously carry out functions
applicable to search and rescue,
surveillance, law enforcement,
inspection, mapping, and aerial
cinematography; in any weather
conditions and using only on-board
intelligence and computing power.
An autonomous robot performs behaviors or tasks with a high
degree of autonomy, which is particularly desirable in fields such
as space exploration, cleaning floors, mowing lawns, and waste
water treatment.
DLR

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.12 10.10.2014
Why use Robots?
• Dangerous
• Dirty
• Dull
• Difficult
• Automation
• Augmentation
• Assistance
• Autonomous Fraunhofer

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.13 10.10.2014
Increase product quality
– Superior accuracies (wafer-handling: micrometers)
– Repeatable precision Consistency of products
Increase efficiency
– Work continuously without fatigue
– Need no vacation
Increase safety
– Operate in dangerous environment
– Need no environmental comfort – air conditioning, noise
protection, etc.
Weltin
Why use Robots?

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.14 10.10.2014
Reduce cost
– Reduce scrap rate
– Lower in-process inventory
– Lower labor cost
Reduce manufacturing lead time
– Rapid response to changes in design
Increase productivity
– Value of output per person per hour increases
Weltin
Why use Robots?

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.15 10.10.2014
http://slideplayer.de/slide/869/
History of Robots
and
Automation

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.16 10.10.2014
History of Robots and Automation
The abacus (Phoenicia: abak, Latin: abax) comes to be used in the Far East. The
abacus served as an aid to add figures. Furrows were scratched precisely into a
stone or a wooden board to count beans or pebble stones. Much later (approx.
1,000 B.C.) the Greeks and Romans used balls with holes and beans on
abacuses. The balls were thread on a wire and were mounted in a frame, this
founded the abacus which still is known today. With the introduction of the Arabian
figure system which is using the zero as a figure the calculation became easier
and spread in Europe.
5,000 B.C.

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.17 10.10.2014
Water clocks were built in China, Syria and later in Egypt
and Greece.
3,000 – 500 B.C.
History of Robots and Automation

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.18 10.10.2014
Greek mythology: Talos is one of Hephaistos giants made out of bronze.
Europe got him as a guard of Zeus. If Europe what threatened, Talos proceeded
in the fire, and embraced the attacker who burned in such a way. Talos
surrounded Crete three times daily and chased away everybody who entered
the island. He was killed by Medeia when she threatened the Argonauts on their
way home. Medea opened his lifeline in his foot and Talos bled to death. Titan
Prometheus was a defiant sinner against the God Zeus. He created people from
loam and brought them fire against the will of Zeus. To his punishment he was
tied up to a rock where an eagle ate his always daily renewed liver, until
Herakles killed the eagle.
The Worlds first Robot:
Talos 450 B.C.
History of Robots and Automation

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.19 10.10.2014
287 B.C.
Archimedes (approx. 287-212 B.C.): Greek. Mathematician and physicist, has
written significant works about level geometry, arithmetic and mechanics.
Archimedes what born in Sicily and lived in Egypt. In the area of mathematics he
did pioneering discoveries. His studies on the surfaces and volumes of curved
surfaces and bodies led to the infinitesimal calculus. In mechanics Archimedes
developed the lever laws. In addition, the invention of the pulley is ascribed to
him. In Egypt he invented the water snail with which one could carry water from
a deeper level to a higher level. The biggest fame Archimedes attained with the
discovery of the basic law of hydrostatics, called the Archimedes principle.
Wiki
History of Robots and Automation

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.20 10.10.2014
Heron of Alexandria was a mathematician and engineer. His works are delivered
only partially. Above all his executions to automatic devices driven by water and
air are still known. These drafts later on formed the base for the invention of the
steam machine in the eighteenth century.
60 A.C.
History of Robots and Automation

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.21 10.10.2014
The first full-mechanical clock was built by
a Chinese engineer: a water driven device
with parts which allowed the clock to give a
ticking noise on itself. The development of the
mechanical clock later on played an important
role as the early mechanical calculating
machines took over the technology of the
gearwheel and feather devices.
725
History of Robots and Automation

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.22 10.10.2014
The Arabian author Al-Jazari wrote a book about
automation: "Book of the knowledge of mechanical
devices rich in sense". In it a machine is described
which is able to fill and empty a water basin.
Around the year 1300 the Spanish Theologian
Ramon Lullus wrote the "Ars Magna". In this book he
showed a huge number of technologies which have the
purpose to develop a method which should generally
find all the truth. The task was to develop a mechanical
procedure with which logical conclusions could be
drawn. One of these ideas was a machine with
concentric discs. From its symbols and words
sentences were generated by movement.
1300
History of Robots and Automation

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.23 10.10.2014
History of Robots and Automation
Leonardo Da Vinci probably has invented the first mechanical arithmetic
device. A reconstruction of this device has shown that it has a proper function.
Before Da Vinci started to work on " the Last Supper ", he designed a humanoid
robot, a mechanical soldier. The robot could do gymnastics with his arms and
move his head on a flexible neck. The robot could open and close his mouth
and made wild noises by automated drumbeats. The warrior is dressed in an
armament of the late 15 th. century. This robot influenced Leonardos anatomical
studies over and over again.
1494

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.24 10.10.2014
The origins of the golem legend reaches back to
the 12th century. Rabbi Löw, the uppermost
judge of Prague, was depressed by Christian
priests slander on the use of blood. In a dream
he got the order: " Create a human from clay, and
you will destroy this bad intention. " Thus he and
his pupils and servants made themselves up to a
river.
There, three of them kneaded a figure from loam which was brought alive by
certain rituals. The golem detained everybody who carried a load on the bake.
If he found a dead child who should be laid before a synagogue, he handed
over the malefactor to the authorities. After it was quiet again in Prague, Rabbi
Löw returned the golem to the elements, by the reverse execution of the
arousal-rituals.
History of Robots and Automation
1560

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.25 10.10.2014
At the age of only 19 years Blaise Pascal
(1623-1662) invented a 8-figure arithmetic
device called "Pascalin". The Pascalin
could add figures and subtract them. About
fifty of these devices were produced.
Gottfried Wilhelm Leibnitz (1646-1716),
mathematician and philosopher, invented the
"Leibnitz computer" which could multiply by
repeated additions, an algorithm which is
used even today. Leibnitz also worked on the
concept of a "reason-gifted calculating
machine" which should explain and evaluate
ideas.
1642
1694
History of Robots and Automation

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.26 10.10.2014
Vaucanson builds a mechanical musician which can play eleven
different melodies. He designed a mechanical duck which can drink,
eat, paddle in the water and crap its excrements.
1737
History of Robots and Automation

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.27 10.10.2014
Pierre and Henri Louis Jacquet-Droz (Switzerland) invented a writing
machine. The lifelike figure of a boy could write texts which existed from
up to 40 letters. Further on he constructed a lady who could play the
piano, and a machine which was able to draw a portrait of King Louis XV.
History of Robots and Automation
1773

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.28 10.10.2014
Alessandro Graf of Volta (1745-1827) together with
Luigi Aloisi Galvani are the pioneers of the age of the
electricity. In 1775 he invented the Elektrophor. Also
from him is the invention of the straw electrometer with
which he improved the electroscope. Nevertheless, his
biggest and most successful invention was the Volt
Column contrived in 1800. The Volt Column is a
battery which exists of alternately copper and zinc
records stratified about one another. The records were
separated of each other by cloth scraps which were
dipped into acid. The volt column became the most
useful electric resource, because it could supply a
steady current.
1800
History of Robots and Automation

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.29 10.10.2014
Already in 1728 the French mechanic
Falcon used punched cardboard stripes
for the control of a loom. Success was
given to the invention only with Joseph-
Marie Jacquard who built an automatic
loom 1805 in Lyons. Jacquard used
punched cardboard records which were
joined to a tape. The resulting pattern
were scanned mechanically with needles,
steering the raising of the chaining
threads in the loom.
1805
History of Robots and Automation

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.30 10.10.2014
The masterpiece of a watchmaker from
Genoa: A tiny pianist plays the piano, two
birds are singing, the doors of a temple
automatically open. The clock exists of
about 3000 single parts.
1830
History of Robots and Automation

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.31 10.10.2014
Charles Babbage with the "Difference Engine" and the "Analytical Engine“
develops two mechanical calculating machines which he cannot complete
while alive because of shortage of money. The latter counts as the precursor of
modern computers. Babbages analysis "Economy of machinery and
manufactures" of the factory capitalism becomes an important source for Karl
Marx. Babbage puts the life insurance-being on a mathematical basis, deals
theoretically with submarines and their navigation and also derives a theory for
the forming of glaciers.
1834
History of Robots and Automation

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.32 10.10.2014
Countess Ada Lovelace, born in 1815,
translated Babbages " Analytic Engine "
into the English, and made supplemental
notes and own considerations to the
machine. Ada Lovelace presented a written
work how to calculate Bernoulli figures with
the machine. This plan not only brought her
the fame to the first female programmer but
generally to be the first programmer at all.
Later the computer language “Ada” was
named after her.
1843
History of Robots and Automation

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.33 10.10.2014
Herman Hollerith patented a machine which could evaluate data on punch
cards. For the 11th census of the USA several enterprisers applied beside
Hollerith. The competitors proposed colored cards which had to be counted and
sorted by hand. With a comparative test Holleriths machines proved to be
superior to those of the other procedures. This led to the fact that his machines
carried out the evaluation of the data. Therefore, the USA at that time had
62,622,250 inhabitants. His enterprise, the "Tabulating Machine Company", in
1924 became IBM.
1890
History of Robots and Automation

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.34 10.10.2014
Czech author Karel Capek (1890-1938)
wrote the stage play RUR, in which
intelligent machines, used as manpower,
rebelled against their creators and
extinguished the human culture. Capek
called these machines ROBOT (from
robota, statute labor work, and robotnik,
slave). He used this name already in a
short history (Opilec), but only with RUR
(for Rossum's Universally Robot) the
name ROBOT asserted itself in general.
1917
History of Robots and Automation

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.35 10.10.2014
In 1927 "Metropolis" came to the cinemas,
the silent film classics of Austrian director
Fritz Lang. In "Metropolis" the future state is
a class society. While in the heedless
downtown the workers live like slaves and
are tyrannized ten hours a day by the
machine, the people of the upper town live
in a world full luxury and surfeit. In Pittsburg
a robot system called "Televox" supervised
the water level in the water supply reservoir
of a high-rise building and switched the
pumps on when required. "Televox" could
get going a vacuum cleaner and a
ventilating fan, it was able to switch on and
switch off lamps, as well as open and close
windows and doors.
History of Robots and Automation
1927

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.36 10.10.2014
In 1935 Konrad Zuse (1910-1995) built the
computer “Z1”. It counts as the first freely
programmable computer of the world. It was
finished in 1938 and was financed completely
from private resources. Z1 already contained all
parts of a modern computer, as for example
control unit, program control, memory, micro
sequences and floating point arithmetic. In
1986 Konrad Zuse took the decision to rebuild
the Z1 once again. In the period from 1987-
1989 he redesigned thousands of parts of the
Z1, because the calculator and the original
plans were destroyed in the Second World War.
This rebuilt Z1 can be visited in the German
Museum of Technology in Berlin-Kreuzberg.
1935
History of Robots and Automation

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.37 10.10.2014
Isaac Asimov (1920-1992) writes the book
"Runaround" in which he formulates his " 3
laws of robotics":
1.) A robot may never injure a person, or by no
action, allows that a person is harmed.
2.) A robot must obey the orders which are
given him by people, unless they stand in
contradiction with the first law.
3.) A robot must protect his own existence, as
long as its self protection does not offend
against the first or second law.
Later among other things he wrote "The
Bicentennial Man", a story in which a robot
gives up its immortality to become a real living
person.
1942
History of Robots and Automation

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.38 10.10.2014
The British government furnishes a research center in Bletchley park to crack the
secret codes of the Germans. With the tube computer "The Bomb" they really
achieved success in decoding, and thus more money was granted. Tom Flowers
built "Colossus" within 10 months. In December 1943 it was ready for use with its
1500 tubes. Today these computers are considered as the first electronic digitally
computers. Later, Winston Churchill ordered to destroy "Colossus" together with
all relevant documents, because nobody should get knowledge of the decoding
success of the allies.
1944
History of Robots and Automation

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.39 10.10.2014
George C. Devol receives the patent for a
multipurpose reproduction apparatus for the
control of machines.
The transistor in 1946 was developed from
William Shockley, Walter Brattain, and John
Bardeen. In 1956 they receive the Nobel Prize for
this work. Transistors revolutionized computer
engineering because of their reliability compared
with tubes. Transistors are the basis for the
unprecedented miniaturization race which later
leads to integrated circuits.
History of Robots and Automation
1946

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.40 10.10.2014
William Grey Walter (1910-1977) designed
devices for the cerebral topography and
studied the forming of complex behavior
released by reflex actions. He built the robot
tortoises "Elsie" and "Elmer", and though
founded the era of mobile robots. "Elsie",
e.g., was able to localize a source of light
and go in its direction. It was steered
electronically and pursued with batteries.
"Elsie" could recharge them independently
in certain loading stations. Walter used the
term "Machina Specularis“ which means
“Observing Machine ".
1947
History of Robots and Automation

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.41 10.10.2014
Raymond Goertz designed the “Tele-
Operator-Arm" for the atom energy
authority, allowing actions from a distance.
With it one could act safely within
radioactive material. Since 1985 the Ray
Goertz-Reward is advertised to honor
persons performing outstanding
achievements in the area of telerobotics.
1951
History of Robots and Automation

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.42 10.10.2014
The development of automation machines
began with the beginning of the fifties. At that
time George Devol and Joe Engelberger
developed the robot “Unimate” whose plans
were patented in December 1954. Unimate was
the first industrial robot in use. It weighted two
metric tons and was steered through a program
which was stored on a magnetic device. At first
it was used in the production of television tubes,
later it served with sequencing and stocking of
die casted metal parts. In 1961 the first Unimate
was installed at General Motors. Henceforth the
automobile industry was leading in the
development of robots.
1954
History of Robots and Automation

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.43 10.10.2014
Beginning of the unmanned space flight.
Russia and America sent probes into outer
space. The first Russian attempts, Lunik A,
B, C were destroyed by rocket explosions.
Lunik 1 (Jan., in 1959) after bypassing the
moon unintentional swung into a solar orbit,
however, confirmed the existence of the
solar wind. Lunik 2 (Sept., in 1959) was the
first to hit the lunar surface deliberately.
Lunik 3 (Okt., in 1959) made photos of the
backside of moon. The U.S. started the
"Pioneer" missions. The test of technology
stood in the foreground, science only came
afterwards. Pioneer 0,1,2 and 3 exploded or
burned in the terrestrial atmosphere.
1958
History of Robots and Automation

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.44 10.10.2014
Nobel Laureate for physics (2000), Jack
St. Clair Kilby from Texas Instruments
builds the first I.C. (Integrated Circuit)
consisting of 5 components, on a piece of
germanium which was not longer than one
centimeter and thinner than a toothpick.
The enterprise "Planet Corporation " sells
the first commercially available robot.
Xerox puts the first photocopier on the
market.
History of Robots and Automation
1959
Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.45 10.10.2014
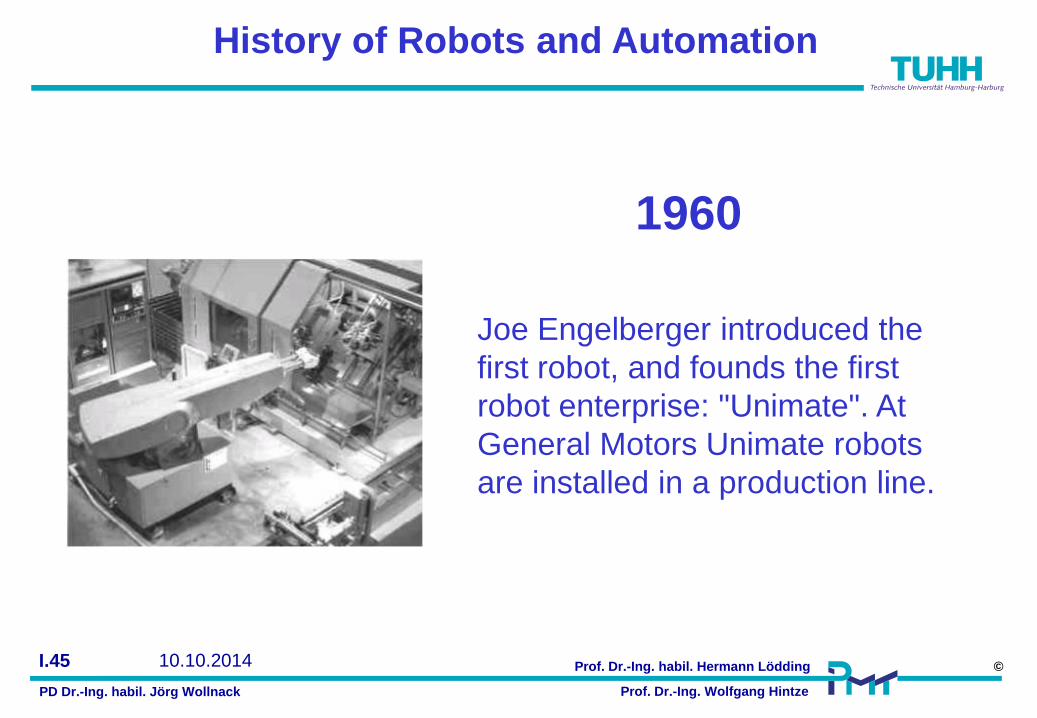
Joe Engelberger introduced the
first robot, and founds the first
robot enterprise: "Unimate". At
General Motors Unimate robots
are installed in a production line.
1960
History of Robots and Automation

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.46 10.10.2014
At Johns Hopkins University in Baltimore brain
researchers developed "Hopkins Beast". The
“Hopkins Beast” implements different behavior
patterns found with protozoon: patrolling his
surroundings until the batteries become weak, the
search for "food" in the form of loading stations, the
docking to the stations in analogy to the absorption
of nutrients and the "shake" for releasing the
plugging to continue the patrol. The photoelectric
cells of the "Beasts" were substituted later with
video cameras with which the loading stations were
better to be localized. A “Beast” could operate in this
manner theoretically unlimited. In 1960 about 6000
computers are in use in the USA. Enterprise
"American Machine and Foundry” markets the
cylindrical robot "Versatran", from H. Johnson and
V. Milenkovic.
1962
History of Robots and Automation

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.47 10.10.2014
Researchers in the Los Amigos
hospital in Downey, California,
develop the first computer steered
robot arm. The "Rancho Arm" was
used as a tool for handicapped
persons. Six joints gave it the
flexibility of a humanly arm.
1963
History of Robots and Automation

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.48 10.10.2014
1967
Marvin Minsky and Seymour Papert led the “Blocks Microworld Project", in
the labs of the MIT. This project improved the "seeing" of computers and
robots, their mobility and the speech recognition processing; the robots could
manipulate a world from geometrical blocks and distinguish different colors,
forms and imensions. At that time the team around Seymour Papert developed
the oriented computer language LOGO, with which even children could work.
History of Robots and Automation

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.49 10.10.2014
1970 Stanford: The robot called
Shakey could navigate
through eight rooms in
which geometrical blocks
were put up. He could
"understand" instructions
using simplified English.
Douglas Lenat and others
worked out concepts to
automatically derive
variables, necessary for the
solution of problems. For
the first time fuzzy logic is
demonstrated practically.
History of Robots and Automation

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.50 10.10.2014
1971
The Wabot-1, developed at the
Wasada University between 1970-
1973, counts as the first "humanoid
robot" of the world. The Wabot owns
functioning legs and hands with
sensors and AI-systems which allows
him to act like a child aged one and a
half years. Its "walking" was kind of
static shifting the center of gravitation
from one foot to the other.
History of Robots and Automation

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.51 10.10.2014
1974 - 1976
Professor Scheinman, the inventor of the "Stanford Arm", founds the enterprise "Vicarm
Inc." to market a version of the arm commercially. The arm is steered through a
microcomputer. In 1976 a version of the arm is used near the space enterprise "Viking“.
A direct descendant of the Stanford arm is PUMA (Programmable Universally Manipulator
for Assembly). Scheinman reworked the robot during his time in MIT, such that its
construction comes close to that of a human arm. The first commercially available version
of the robot arm was licensed and reworked by Unimation, and was delivered in 1978 to
GM. The arm is intended mainly for the application in the automobile industry. The
PUMA's arm is up to now the most successful robot arm.
History of Robots and Automation

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.52 10.10.2014
1979
The Austrian Hans Moravec designs the Stanford Cart, the first computer
steered robot vehicle able to navigate through areas with obstacles. Dr. Hans J.
Berliner writes a backgammon program which hits the ruling backgammon world
champion. Marvin, the paranoid android from Douglas Adams book “The
Hitchhiker’s Guide to the Galaxy” says: "You think, you have problems. What
would you do if you were a manic depressive robot? No, you do take care. - I
am 50000 times more intelligent than you and even I have no solution.
History of Robots and Automation

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.53 10.10.2014
1983
Odex1 (built by Odetics Inc.) is the first
commercially available robot which can
move in every kind of area. Odex1 can
work in surroundings which show a risk for
people, and where vehicles with wheels fail.
(Radioactive zones, fight areas, mine
tunnels). Its legs can be used for moving
and operate as arms to lift objects. Japan
Ministry of Finance and the Ministry of
International Trade and Industry decide to
make available 40 million yens for the
development of robots which can be used
in dangerous surroundings.
History of Robots and Automation

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.54 10.10.2014
1984 Stanford Research Institutes: The robot "Flakey" is
driven by two wheels and has twelve ultrasonic sensors
to recognize obstacles, a video camera and a laser-
based range finder. It can recognize halls and alleys
and plan its way.
Doug Lenat launches the 'Cyc' project to collect rules for
a knowledge-based data bank which should enable
robots to understand our world. The Waseda
university presents Wabot-2 which can play the piano.
The first neuro-surgical intervention under assistance
of a robot is carried out in the Long Beach Memorial
Hospital. For this purpose a stereo tactile robot is used.
History of Robots and Automation

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.55 10.10.2014
1988
The first anthropomorphic manipulator with the name "Greenman" is
developed in the Space and Naval Warfare Systems Centre San Diego (SSC
San Diego ) to imitate human manipulation by means of telerobotics. It has a
video camera eye on an aviator helmet. Successor versions of this telerobotics
system are also used under water.
History of Robots and Automation

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.56 10.10.2014
1990
In 1990 there are more than 40 Japanese companies, among others the giants
Hitachi and Mitsubishi who specialize in the production of commercial robots. In
the 90th the number of the industrial robots used world wide rise rapidly.
Especially in Japan production also is automated by robots. Different
standards and architectures for robots have asserted themselves, e.g. parallel
or serial architectures which differ in the working-range and in the positioning
and repeatability performance .
History of Robots and Automation

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.57 10.10.2014
1993
Seiko Epson Corp. begins in 1993 a micro robotics project. The first product of
this series was called "Monsieur" and could follow sources of light. Today's
succession models (2007) can be steered by "Bluetooth" without cable using a
normal Handy. Several "Monsieur" can operate simultaneous and independently
from each other. Special zinc batteries keep "Monsieur" active during five hours
of movement. In the MIT, a robotics project called "Cog" exists since 1993. Cog’s
task is to collect theories on human perception. Cog is a humanoid robot
consisting of torso, arms and head, with 21 degrees of freedom and a huge
number of sensor systems: cameras, gyroscopes, microphones, grope- and
kinesthetic sensors. Cog can follow the movement of faces.
History of Robots and Automation

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.58 10.10.2014
1997
The Scottish hotel owner Campbell Aird gets equipped with a proper working
bionic arm.
History of Robots and Automation

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.59 10.10.2014
1998
History of Robots and Automation
Cynthia Breazeal from MIT designs "Kismet“. The robot can express itself with its
facial expressions and gestures likely to a baby and interoperates with people.
4 CCD cameras for image processing, speech synthesis and speech
recognition, 15 DOF for facial expressions and the representation of emotions, a
complex software for context dependent change of the system parameters are
the components of Kismet. The processing is worked out by 10 Pentiums
Processors linked together, thus splitting up the workload to keep the latency ow.

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.60 10.10.2014
1999
History of Robots and Automation
With the “Da Vinci Surgery System", California
company “Intuitive Surgical ", doctors can operate
patients minimuminvasive. Augmented reality
connects pre-surgically upraised data from picture-
giving procedures with the live picture of the key-
hole camera.

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.61 10.10.2014
2000
History of Robots and Automation
Honda presents robot ASIMO. It is
as tall as 1.20 meters, weights 43
kilograms, and is controlled by
remote control. It can run and rise
stairs. A linguistic program allows
ASIMO the understanding of approx.
50 commands, shouts or greetings.
University of Berkeley develops since 2000 an artificial
exoskeleton for people. The "Berkeley Lower Extremity
Exoskeleton" (BLEEX) should help firefighters, disaster
assistants and soldiers to transport heavy loads into areas
inaccessible for vehicles. Today a 70 kilogram load, felt like 2
kilograms for the bearer can be transported with BLEEX.

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.62 10.10.2014
2003
History of Robots and Automation
Robotics labs at Stanford University,
escorted by Mark Cutowsky, study and
imitate insects. They design six footed
robots, equipped with the complicated
movement-mechanics of cockroaches.
Tiny, multiple footed robots can be used in
surroundings which are too dangerous or
too small for people.
Prof. Paolo Dario (Italy) and Mark Oliver Schurr (Germany), introduce at a
conference of surgeons robot EMIL. EMIL (Endoscopic Microcapsule
Locomotion) is a 3 cm robot which is swallowed by the patient. It moves like a
centipede in the alimentary tract. It has a micro-camera and a scalpel, works by
remote control and needs no battery. EMIL is excreted naturally and could help
the prevention of cancer of the intestine.

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.63 10.10.2014
2004
History of Robots and Automation
Both Mars-Exploration-Rovers "Spirit, MER-A” and
“Opportunity, MER-B", carry out successfully
geologic investigations on Mars.
Sony entertainment robot QRIO directs the
philharmonic orchestra of Tokyo on the 13th March.
(Beethoven's symphony No.5, and melodies of
Takashi Yoshimatsu). QRIO not only can go on two
legs, but can walk on uneven area. It can dance,
recognize faces and continue a conversation.

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.64 10.10.2014
History of Robots and Automation
The Japanese Pavillion at the EXPO 2005 completely stands
in the sign of robotics: Service androids are introduced in the
area speaking five languages with gestures and expressions
in their communication. Robots in the security area are used
for the children's survey and robots serve as cleansing
forces. Automatic buses and wheel chairs move through the
area.
2005

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.65 10.10.2014
Installed Industrial Robots

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.66 10.10.2014
Motivation

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.67 10.10.2014
Applications
Production Transportation- and
Flight Systems
Röntgenquelle
Röntgengerätschematisch
Strahlenkegel
Bildplatte
Zentralstrahl
Robotic and Medicine
Industrial Robots
Kuka Ahlers
Tool Machine SHW
Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.68 10.10.2014
Video I
https://www.youtube.com/watch?v=fH4VwTgfyrQ&feature=player
_detailpage

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.69 10.10.2014
https://www.youtube.com/watch?feature=player_detailpage
&v=hLB2WuPMel0
Video II

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.70 10.10.2014
Video Fraunhofer Aviation

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.71 10.10.2014
Video Leica 6D Map Solution

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.72 10.10.2014
Video Leica T-MAC with Spatial Analyzer

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.73 10.10.2014
Video CAS-CAD-CAM-Path

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.74 10.10.2014
Architecture of Robotic Systems I
Mechanical structure
– Kinematic model
– Dynamic model
• Actuators: electrical, hydraulic, pneumatic, artificial muscle
• Computation and controllers
• Sensors
• Communications
• User interface
• Power conversion unit

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.75 10.10.2014
Rough Inter-polation
Inter-polation
Controller
Machinecoordinates
time sequence
{ }tk
xG( )tk
xF( )tm
pRI pEI
pRI
Sensor (x)
pTCP
A( )t vTCP
A aTCP
A < 10ms
{ }tm< 1ms
Inverse kin.Transform
Robot Parameter
pRI
Power-Amplifier
Sensor(x,x,x)
Compensationresidual
moments
x( )tm
x( )tm
x( )tm
Frictioncompensation
x( )tm
+ -
Interpreter
Elasticitymodel +
-
DestinationPose
pTCP
AS( )t
Externalsensors
Pathplanning
Task
Architecture of Robotic Systems II

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.76 10.10.2014
Annahmen zurVereinfachung
VereinfachungAufstellen derGleichungen
TheoretischesModell
- Struktur- Parameter
Vereinfachtes theoretisches
Modell
A-priori-Kenntnisüber das System
Struktur unbe-bekannt kannt
Experiment
Identifikation
parame-tr isch
nicht parame-trisch
parame-trisch
nicht parame-trisch
Experim. ModellVergleich
TheoretischeAnalyse
ExperimentelleAnalyse
Qualität
neinja
Ende
Methodology Systems Analysis
Theoretical
Analysis
Experimental
Analysis
Assumption
Simplification
Set up the
Equations
Theoretical
Model Structure/Param.
Simplification
Experiment
A priori Knowledge
Structure known / unknown
Identification
Experiment
Model
compare
Q
Simplified Theoretical
Model
no yes Q := Quality

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.77 10.10.2014
Components of Robot Drives
Geschwindigkeits-
sensor
Velocity
Sensor
Faulhaber
Elektromotor Electric Drive O&Q
Getriebe Gearing
LTN
Positions-
sensor Position
Sensor
Stromsensor Current Sensor
Kuka

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.78 10.10.2014
Robotics is an interdisciplinary research
– Mechanical design
– Computer science and engineering
– Electrical engineering
– Cognitive psychology, perception and neuroscience
Research open problems
– Manipulation, locomotion
– Control, navigation
– Human-robot interaction
– Learning & adaptation (AI)
Summary

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.79 10.10.2014
Lecture Topics
1. Introduction
2. Basic kinematics
3. Pose measurement and Measurement of Robot Accuracy
4. Trajectory planning and control
5. Forces, moments and Euler’s laws
5. Fundamentals in electronics and computation
(System and Signal Processing)
6. Sensors and instrumentation
7. Actuators and power transmission devices

Prof. Dr.-Ing. habil. Hermann Lödding
Prof. Dr.-Ing. Wolfgang Hintze
©
PD Dr.-Ing. habil. Jörg Wollnack
I.80 10.10.2014
END 1