robot progress report “emerson” crawford hampson eel5666: imdl march 25, 2010
TRANSCRIPT
Robot Progress Report“Emerson”
Crawford HampsonEEL5666: IMDL
March 25, 2010
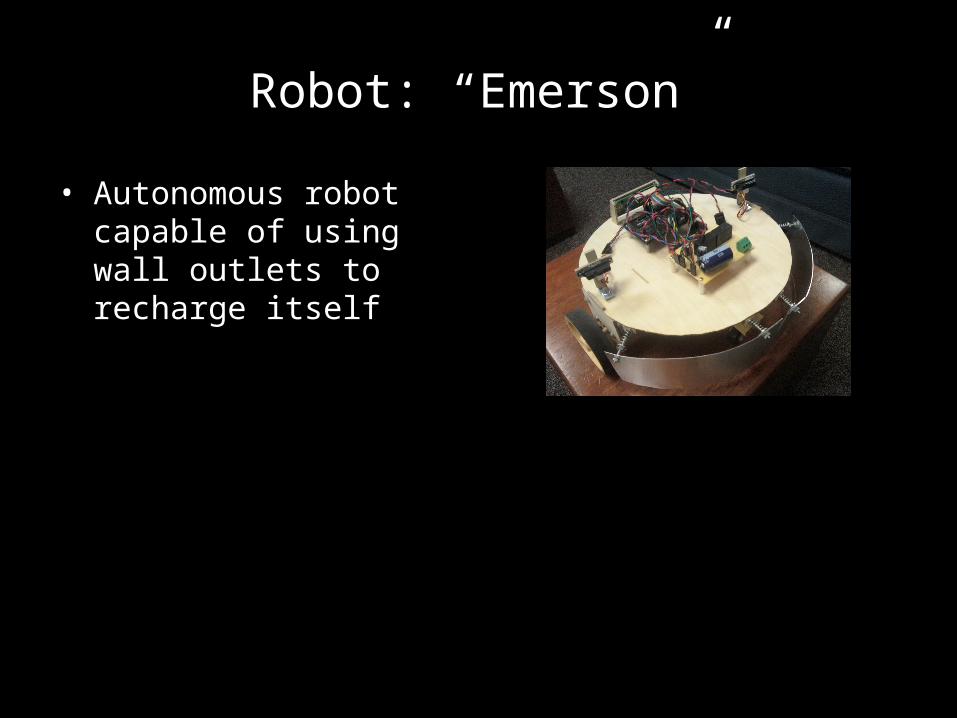
Robot: “Emerson”
• Autonomous robot capable of using wall outlets to recharge itself
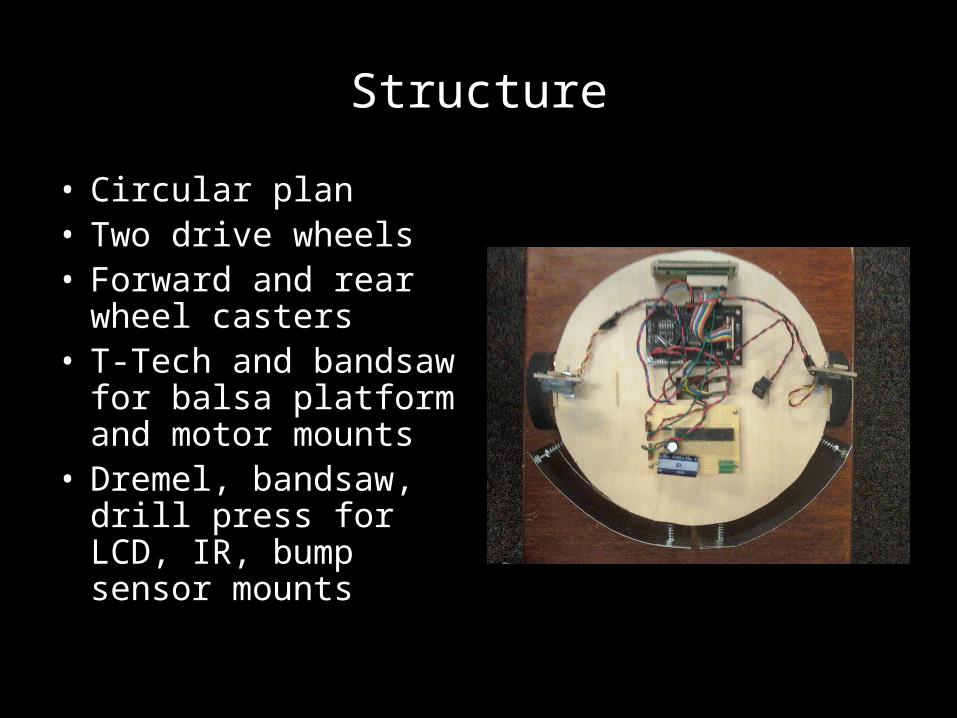
Structure
• Circular plan• Two drive wheels• Forward and rear
wheel casters• T-Tech and bandsaw
for balsa platform and motor mounts
• Dremel, bandsaw, drill press for LCD, IR, bump sensor mounts

Sensors
• Bump sensor plates– Radio Shack switches
• IR sensors– Sharp medium-range
sensors
• Electromagnetic– Currently, hacked
Stanley stud finder
Behavior
• Obstacle Avoidance– Bump sensors
• LS, LF, RF, RS differentiation
– IR• Crossing or not
• Fuzzy logic speed control

Conclusion
• A little behind schedule, but coming along well
• Next: – Fully develop EM sensor– Build XYZ stage– Integrate
Questions?