robot
TRANSCRIPT

Robot
Gerardo Carmona
Sarahí Morán
Mayumi hori
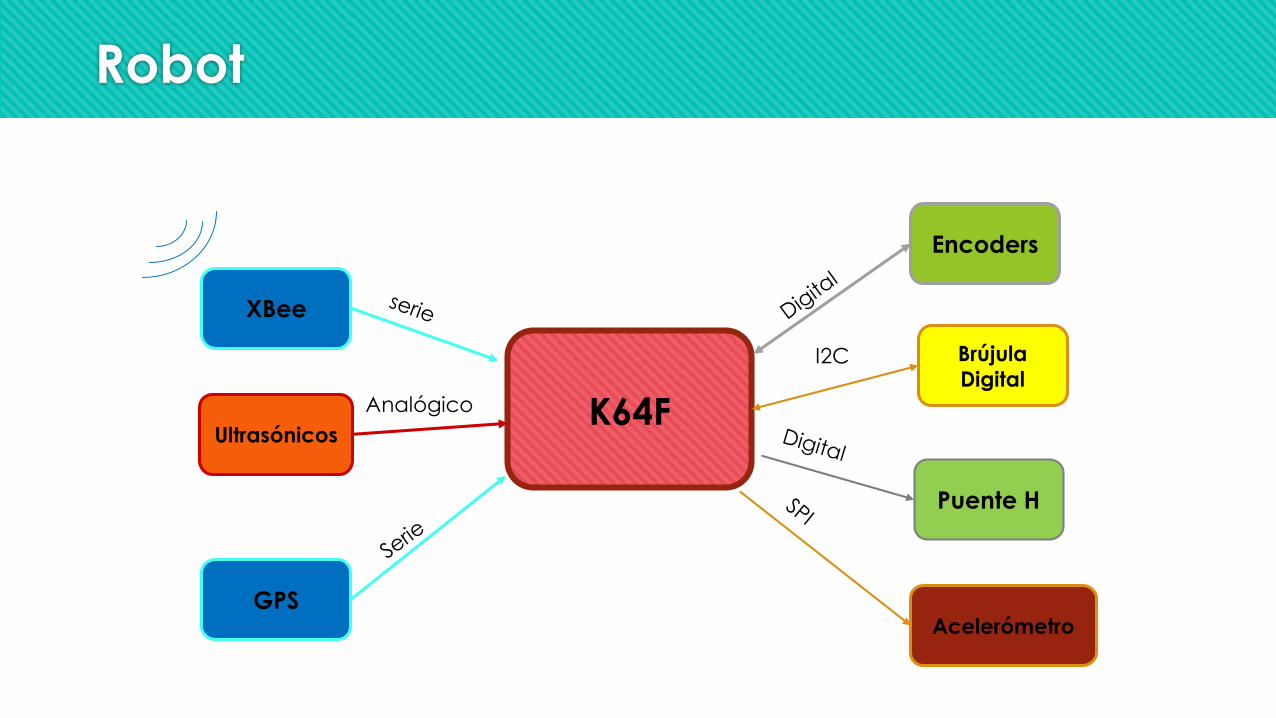
Robot
K64F
XBee
Puente H
Brújula
Digital
Ultrasónicos
Encoders
GPS
I2C
Analógico
Acelerómetro

Control
K64F XBeeAcelerómetro PC
Script en
Python
serie
I2C
Serie

ETHERNET
K64FGoogle
DocsLDR
PC /script
de Python
serverUDPAnalógico
LAN

GPS Module PMB-648
Proporciona datos de localización para dispositivos.
Es capaz de rastrear hasta 20 satélites con actualizaciones una vez por segundo.
Cuenta con una antena incorporada, la cual recibe las señales (interiores o al aire libre).
Power requirements: 3.3 to 5 VDC
Power consumption: 65 mA @ 5 VDC
Communications: TTL or RS-232 asynchronous serial @ 4800 bps
Supported NMEA sentences: GGA, GSV, GSA, RMC (optional VTG, GLL)
Dimensions: 1.25 x 1.25 x .35 in (32 x 32 x 9 mm)

Encoder Incremental
Este tipo de encoder es un dispositivo electromecánico que determina su posición y velocidad
mediante el conteo de pulsos.
Se utilizó interrupciones para ir monitoreando los pulsos del encoder

Xbee- S2
Los módulos de la serie 2 cuentan con un protocolo de comunicación inalámbrica de baja
velocidad (ZigBee) el cual puede comunicar varios dispositivos a la vez.
3.3V @ 40mA
250kbps Max data rate
2mW output (+3dBm)
Alcance en interiores: 40 m.
Alcance en exteriores: 120 m.
Built-in antenna
Fully FCC certified
6 10-bit ADC input pins
8 digital IO pins
128-bit encryption
Local or over-air configuration
AT or API command set

Bluetooth-HC06
Los módulos de serie Bluetooth son utilizados para la conversión de puertos series a
Bluetooth (inalámbrica).
Baud Rate: 9600 Kbps
Alcance: 10 metros aprox

ULTRASÓNICOS-LV-MaxSonar -EZ0
Sensor analógico capaz de detectar objetos, mediante la emisión de un sonido y el tiempo que
la señal tarda en regresar.
Alcance sonar: 6 pulgadas a 254 pulgadas con resolución de 1 pulgada .

ACELERÓMETRO K64F
Sensor de 6 ejes capaz de medir la aceleración o vibración , el cual proporciona señales
eléctricas según el cambio físico generado.
6-axis,
1.95 V to 3.6 V VDD supply voltage,
±2 g/±4 g/±8 g dynamically selectable acceleration full-scale range
14-bit ADC resolution for acceleration measurements

ADXL345
Sensor de 3 ejes capaz de medir la aceleración o vibración , el cual proporciona señales
eléctricas según el cambio físico generado.
3 ejes
High resolution: 13 bit
Digital output data: 16 bti
SPI and I2C

SD
Tarjeta de memoria, en la cual almacena los puntos registrados por el GPS.

ETHERNET
Mediante un script en Python (pc) se da de alta un servidor Web socket y la K64F se conecta al
servidor y manda los datos de un puerto analógico.
El servidor (pc) manda los datos a una hoja de calculo en google docs.

FOTORESISTENCIA
Resistencia a cual varia según la intensidad de luz presente en ella.

Señales comunicación serie de xBee
Señal de los comandos enviados al robot
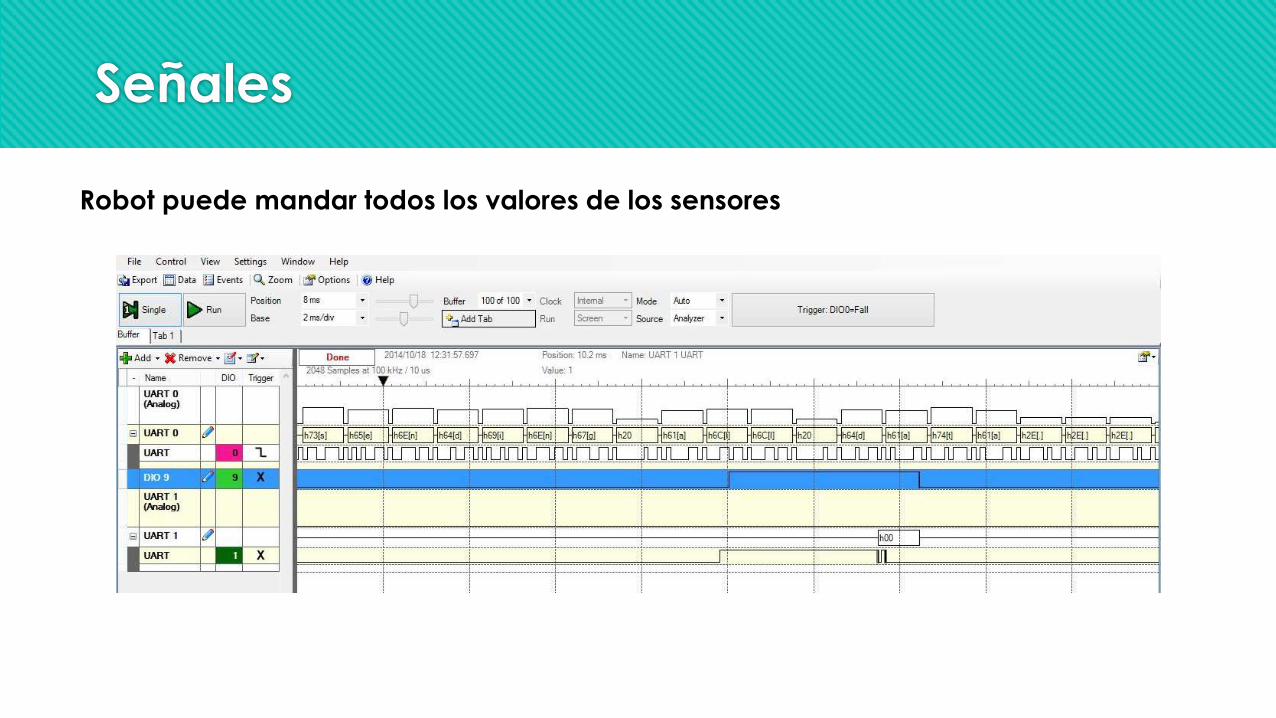
Señales
Robot puede mandar todos los valores de los sensores