robin hogan ewan o’connor the instrument synergy/ target categorization product
TRANSCRIPT

Robin HoganEwan O’Connor
The Instrument Synergy/Target Categorization
product


The Instrument synergy/Target categorization
product • Makes multi-sensor data much easier to use:
– Combines radar, lidar, model, raingauge and -wave radiometer– Identical formatIdentical format for each site (based around NetCDF)
• Performs common pre-processing tasks:– Interpolation on to the same grid– Ingest model data (many algorithms need temperature & wind)– Correct radar for attenuationattenuation (gas and liquid)
• Provides essential extra information:– Random and systematic measurement errorsmeasurement errors– Instrument sensitivitysensitivity– Categorization of targets: droplets/ice/aerosol/insectsdroplets/ice/aerosol/insects etc. – Data quality flags:Data quality flags: when are the observations unreliable?
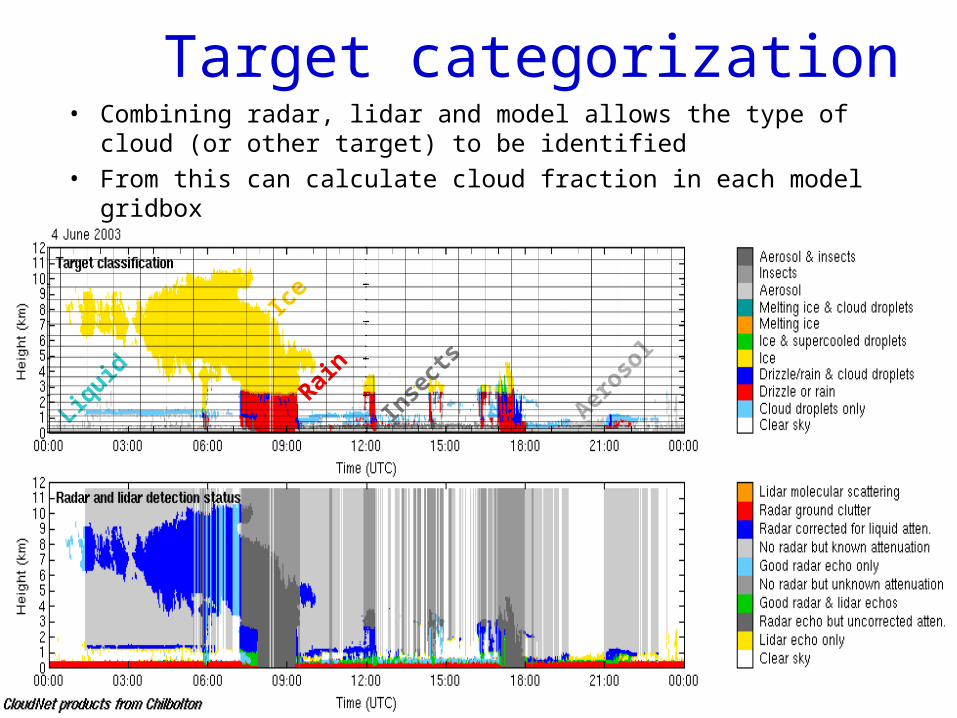
Ice
Liqu
idRai
n
Aeros
ol
Inse
cts
Target categorization• Combining radar, lidar and model allows the type of cloud
(or other target) to be identified• From this can calculate cloud fraction in each model gridbox

Melting layer identification
• Look within 5ºC of Tw=0ºC isotherm in model– Melting layer is where
greatest divergence in radar Doppler velocity
Z v
Classification
Divergence
Melting ice
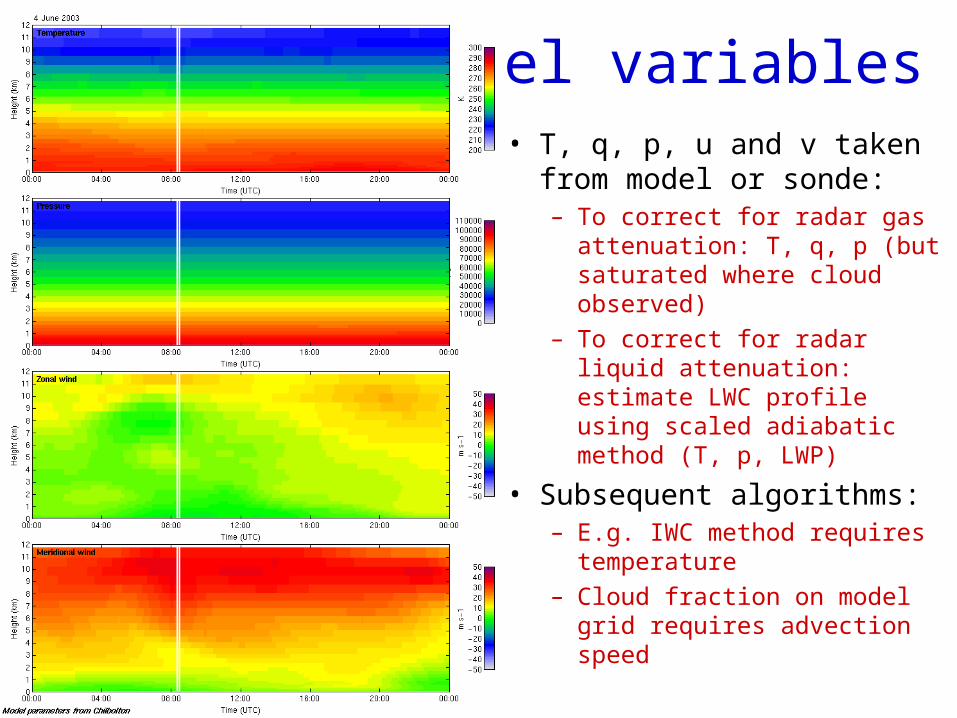
Model variables• T, q, p, u and v taken
from model or sonde:– To correct for radar gas
attenuation: T, q, p (but saturated where cloud observed)
– To correct for radar liquid attenuation: estimate LWC profile using scaled adiabatic method (T, p, LWP)
• Subsequent algorithms:– E.g. IWC method requires
temperature– Cloud fraction on model grid
requires advection speed

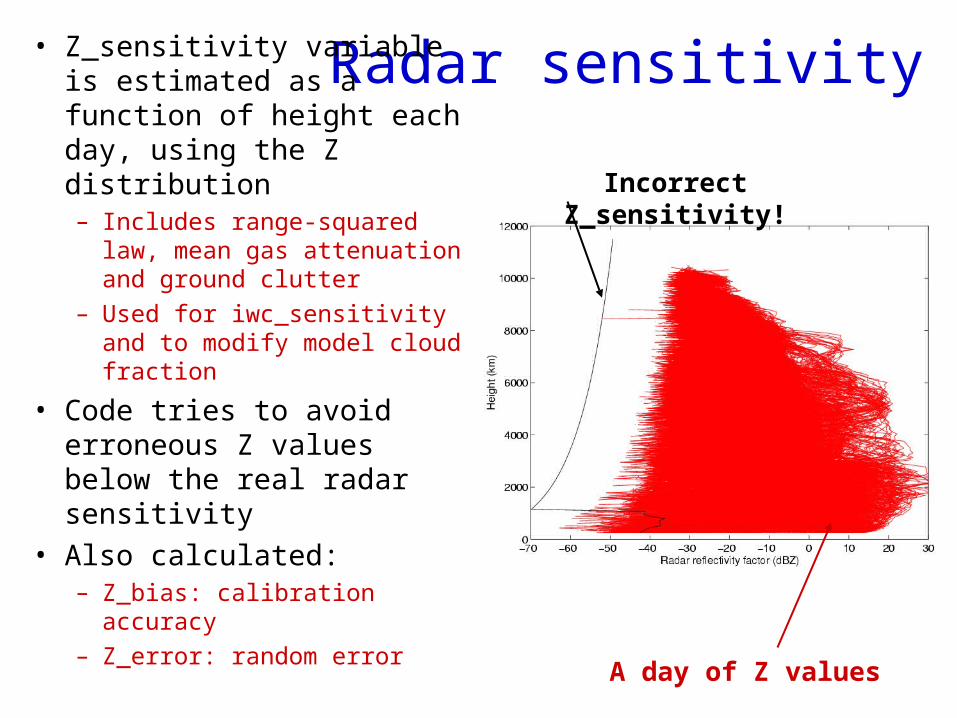
Radar sensitivity• Z_sensitivity variable is estimated as a function of height each day, using the Z distribution– Includes range-squared
law, mean gas attenuation and ground clutter
– Used for iwc_sensitivity and to modify model cloud fraction
• Code tries to avoid erroneous Z values below the real radar sensitivity
• Also calculated:– Z_bias: calibration
accuracy– Z_error: random error
Incorrect Z_sensitivity!
A day of Z values
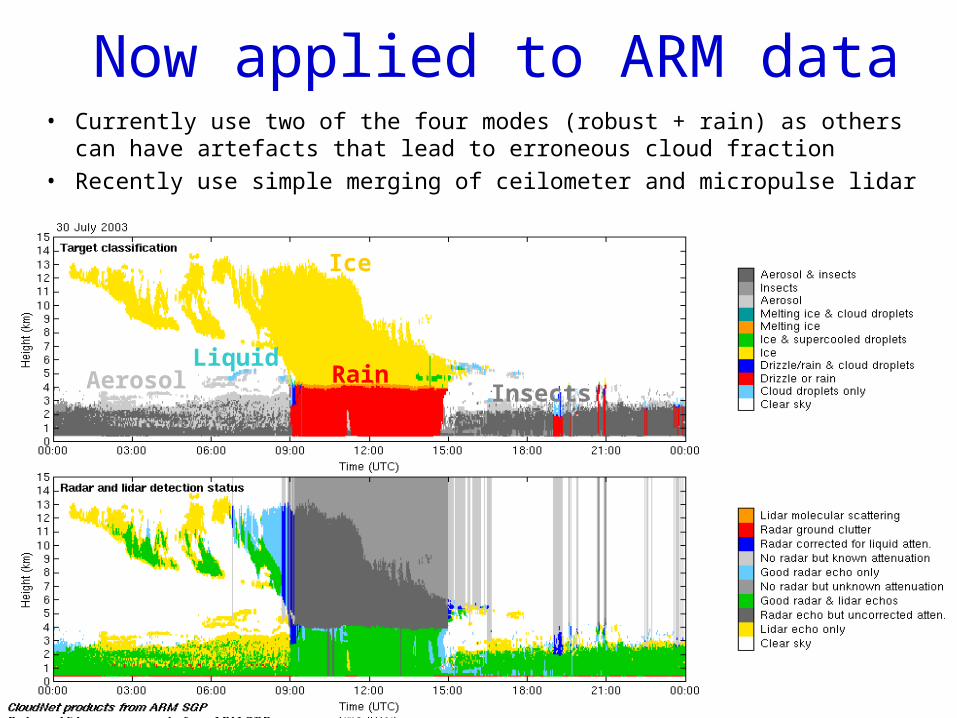
Example fromUS ARM site:Need todistinguishinsects fromcloud
Now applied to ARM data
Ice
LiquidRainAerosol Insects
• Currently use two of the four modes (robust + rain) as others can have artefacts that lead to erroneous cloud fraction
• Recently use simple merging of ceilometer and micropulse lidar