review: transformation matrices - cs csu homepagecs410/yr2015fa/more_progress/l25... · review:...
TRANSCRIPT

Texture Mapping
Lecture #25Tuesday, November 17th 2015
Announcements
• PA3 grades being adjusted– Penalties for flipping dimensions to be
removed• PA4 handed out today
– Due Tuesday, Dec. 8th
– See next slide for details
11/17/15
© Ross Beveridge & Bruce Draper
2
PA4• Three additions over PA3
– Specular Inter-reflection• Recurse on reflection of viewing ray• Multiple result by ks, add to reflection• Base cases:
– Ray does not strike a polygon– Product of ks terms < 1/512– Hard limit of 20 recursions (house of mirrors)
– Translucency• Materials now have translucency percentages• Recurse on continuation of viewing ray
– Angle of refraction for infinitely thin planar surface– Same base as above (ks & k t)
– Anti-aliasing• Five rays through every pixel• Randomly positioned within pixel square
11/17/15
© Ross Beveridge & Bruce Draper
3
Review: Transformation Matrices
11/17/15
© Ross Beveridge & Bruce Draper
4
0041
!
"
####
$
%
&&&&
=
00
−123
−124 3
!
"
######
$
%
&&&&&&
=
12
0 −12
0
−16
26
−16
0
−13
−13
−13
33
−14 3
−14 3
−14 3
34 3
!
"
##########
$
%
&&&&&&&&&&
5551
!
"
####
$
%
&&&&
• The matrix above is an example projection matrix• Q: What exactly is being projected/transformed?
A:Coordinates
Geometric Registration• Registration is the proces of matching locations in one
image to locations in another• Does this matter?
These two images have the same pixels!(But the mapping from left to right image is random)
Imag
e fro
m C
alTe
ch25
6 da
ta s
et
Geometric Registration (II)• Geometric registration finds a mapping that maps
one image onto the other– We will limit ourselves to linear transformation
We should be able to register these…
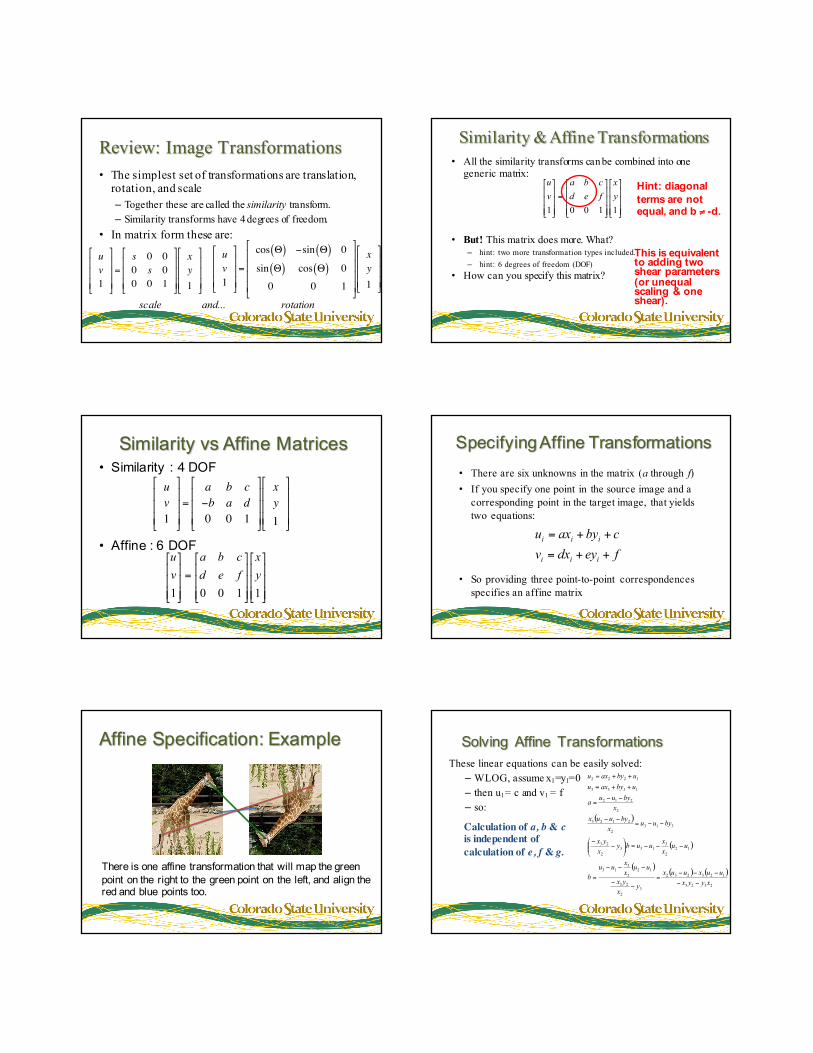
Review: Image Transformations• The simplest set of transformations are translation,
rotation, and scale – Together these are called the similarity transform.– Similarity transforms have 4 degrees of freedom.
• In matrix form these are:
uv1
!
"
###
$
%
&&&=
s 0 00 s 00 0 1
!
"
###
$
%
&&&
xy1
!
"
###
$
%
&&&
uv1
!
"
###
$
%
&&&=
cos Θ( ) −sin Θ( ) 0
sin Θ( ) cos Θ( ) 0
0 0 1
!
"
####
$
%
&&&&
xy1
!
"
###
$
%
&&&
scale rotationand...
Similarity & Affine Transformations• All the similarity transforms can be combined into one
generic matrix:
• But! This matrix does more. What?– hint: two more transformation types included.– hint: 6 degrees of freedom (DOF)
• How can you specify this matrix?
!!!
"
#
$$$
%
&
!!!
"
#
$$$
%
&
=
!!!
"
#
$$$
%
&
11001yx
fedcba
vu Hint: diagonal
terms are not equal, and b ≠ -d.
This is equivalent to adding two shear parameters (or unequal scaling & one shear).
Similarity vs Affine Matrices• Similarity : 4 DOF
• Affine : 6 DOF
!!!
"
#
$$$
%
&
!!!
"
#
$$$
%
&
=
!!!
"
#
$$$
%
&
11001yx
fedcba
vu
uv1
!
"
###
$
%
&&&=
a b c−b a d0 0 1
!
"
###
$
%
&&&
xy1
!
"
###
$
%
&&&
Specifying Affine Transformations• There are six unknowns in the matrix (a through f)• If you specify one point in the source image and a
corresponding point in the target image, that yields two equations:
• So providing three point-to-point correspondences specifies an affine matrix
feydxvcbyaxu
iii
iii
++=
++=
Affine Specification: Example
There is one affine transformation that will map the green point on the right to the green point on the left, and align the red and blue points too.
Solving Affine TransformationsThese linear equations can be easily solved:
– WLOG, assume x1=y1=0– then u1= c and v1 = f– so:
( )
( )
( )( ) ( )
2323
123232
32
23
122
313
122
3133
2
23
3132
2123
2
212
1333
1222
xyyxuuxuux
yxyx
uuxxuu
b
uuxx
uubyxyx
byuux
byuuxxbyuu
a
ubyaxuubyaxu
−−
−−−=
−−
−−−=
−−−=""#
$%%&
'−
−
−−=−−
−−=
++=
++=
Calculation of a, b & cis independent of calculation of e, f & g.
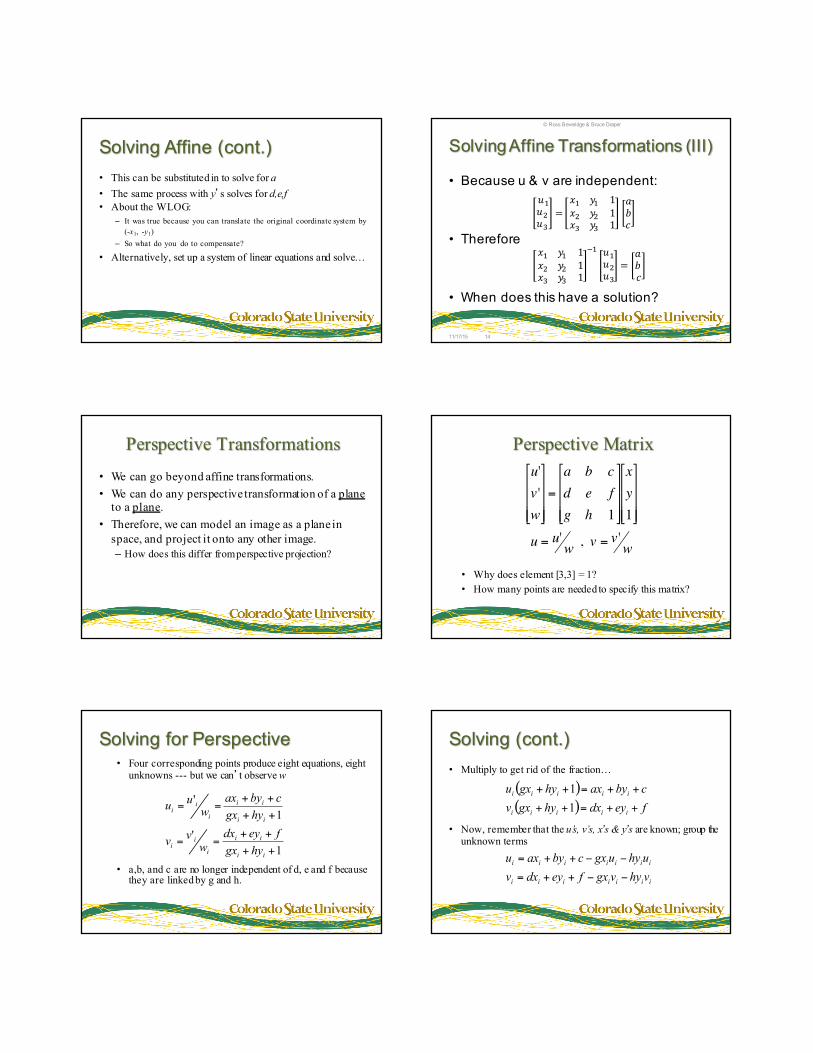
Solving Affine (cont.)• This can be substituted in to solve for a• The same process with y’s solves for d,e,f• About the WLOG:
– It was true because you can translate the original coordinate system by (-x1, -y1)
– So what do you do to compensate?
• Alternatively, set up a system of linear equations and solve…
Solving Affine Transformations (III)
• Because u & v are independent:
• Therefore
• When does this have a solution?
11/17/15
© Ross Beveridge & Bruce Draper
14
𝑢"𝑢#𝑢$
=𝑥" 𝑦" 1𝑥# 𝑦# 1𝑥$ 𝑦$ 1
𝑎𝑏𝑐
𝑥" 𝑦" 1𝑥# 𝑦# 1𝑥$ 𝑦$ 1
," 𝑢"𝑢#𝑢$
=𝑎𝑏𝑐
Perspective Transformations• We can go beyond affine transformations.• We can do any perspective transformation of a plane
to a plane.• Therefore, we can model an image as a plane in
space, and project it onto any other image.– How does this differ from perspective projection?
Perspective Matrix
• Why does element [3,3] = 1?• How many points are needed to specify this matrix?
€
u'v 'w
"
#
$ $ $
%
&
' ' '
=
a b cd e fg h 1
"
#
$ $ $
%
&
' ' '
xy1
"
#
$ $ $
%
&
' ' '
u = u'w , v = v'
w
Solving for Perspective• Four corresponding points produce eight equations, eight
unknowns --- but we can’t observe w
• a,b, and c are no longer independent of d, e and f because they are linked by g and h.
1'
1'
++
++==
++
++==
ii
ii
i
ii
ii
ii
i
ii
hygxfeydx
wvv
hygxcbyax
wuu
Solving (cont.)• Multiply to get rid of the fraction…
• Now, remember that the u’s, v’s, x’s & y’s are known; group the unknown terms
( )( ) feydxhygxv
cbyaxhygxu
iiiii
iiiii
++=++
++=++
11
iiiiiii
iiiiiii
vhyvgxfeydxvuhyugxcbyaxu
−−++=
−−++=
Solving (III)• And express the result as a system of linear equations
!!!!!!!!!!!
"
#
$$$$$$$$$$$
%
&
!!!!!!!!!!!
"
#
$$$$$$$$$$$
%
&
−−
−−
−−
−−
−−
−−
−−
−−
=
!!!!!!!!!!!
"
#
$$$$$$$$$$$
%
&
hgfedcba
vyvxyxuyuxyxvyvxyxuyuxyxvyvxyxuyuxyxvyvxyxuyuxyx
vuvuvuvu
444444
444444
333333
333333
222222
222222
111111
111111
4
4
3
3
2
2
1
1
10000001100000011000000110000001
Solving (IV)• Finally, invert the constant matrix and solve
!!!!!!!!!!!
"
#
$$$$$$$$$$$
%
&
=
!!!!!!!!!!!
"
#
$$$$$$$$$$$
%
&
!!!!!!!!!!!
"
#
$$$$$$$$$$$
%
&
−−
−−
−−
−−
−−
−−
−−
−−−
hgfedcba
vuvuvuvu
vyvxyxuyuxyxvyvxyxuyuxyxvyvxyxuyuxyxvyvxyxuyuxyx
4
4
3
3
2
2
1
11
444444
444444
333333
333333
222222
222222
111111
111111
10000001100000011000000110000001
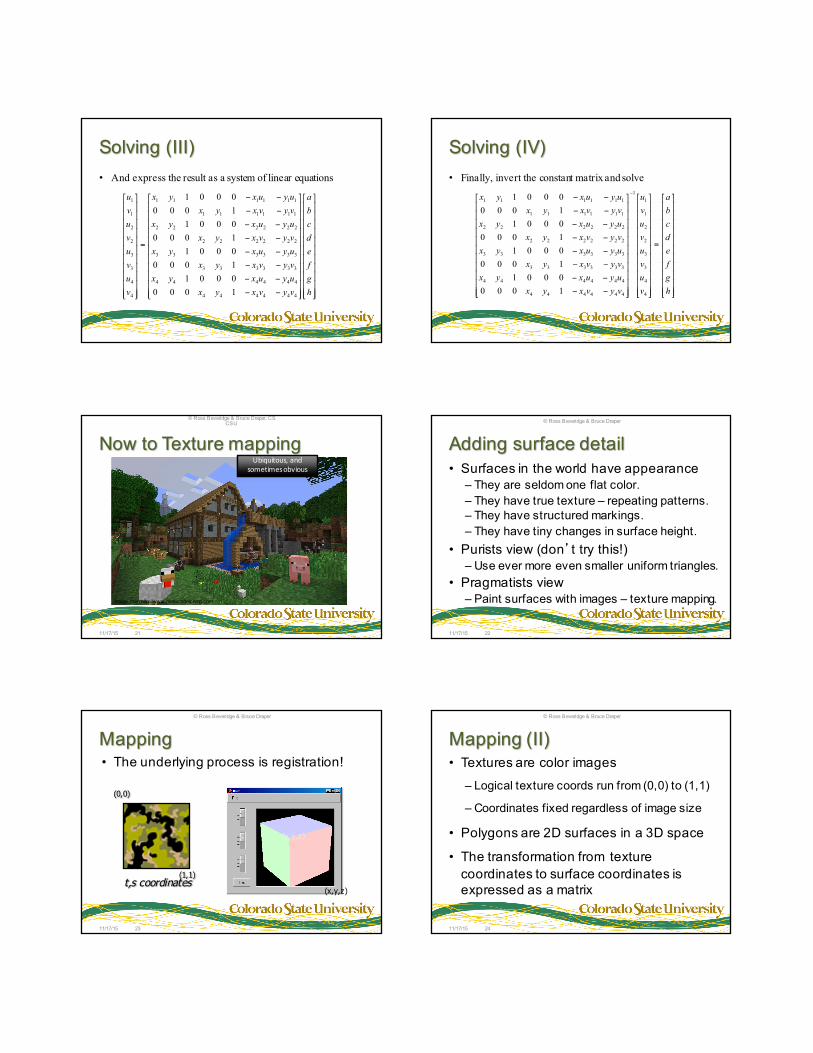
Now to Texture mapping
11/17/15
© Ross Beveridge & Bruce Draper, CS CSU
21
Image from http://www.minecraftercamp.com
Ubiquitous,andsometimesobvious
Adding surface detail• Surfaces in the world have appearance
– They are seldom one flat color.– They have true texture – repeating patterns.– They have structured markings.– They have tiny changes in surface height.
• Purists view (don’t try this!)– Use ever more even smaller uniform triangles.
• Pragmatists view– Paint surfaces with images – texture mapping.
11/17/15
© Ross Beveridge & Bruce Draper
22
Mapping • The underlying process is registration!
11/17/15
© Ross Beveridge & Bruce Draper
23
(0,0)
(1,1)t,s coordinates
(x,y,z)
(x,y,z)
Mapping (II)• Textures are color images
– Logical texture coords run from (0,0) to (1,1)
– Coordinates fixed regardless of image size
• Polygons are 2D surfaces in a 3D space
• The transformation from texture coordinates to surface coordinates is expressed as a matrix
11/17/15
© Ross Beveridge & Bruce Draper
24
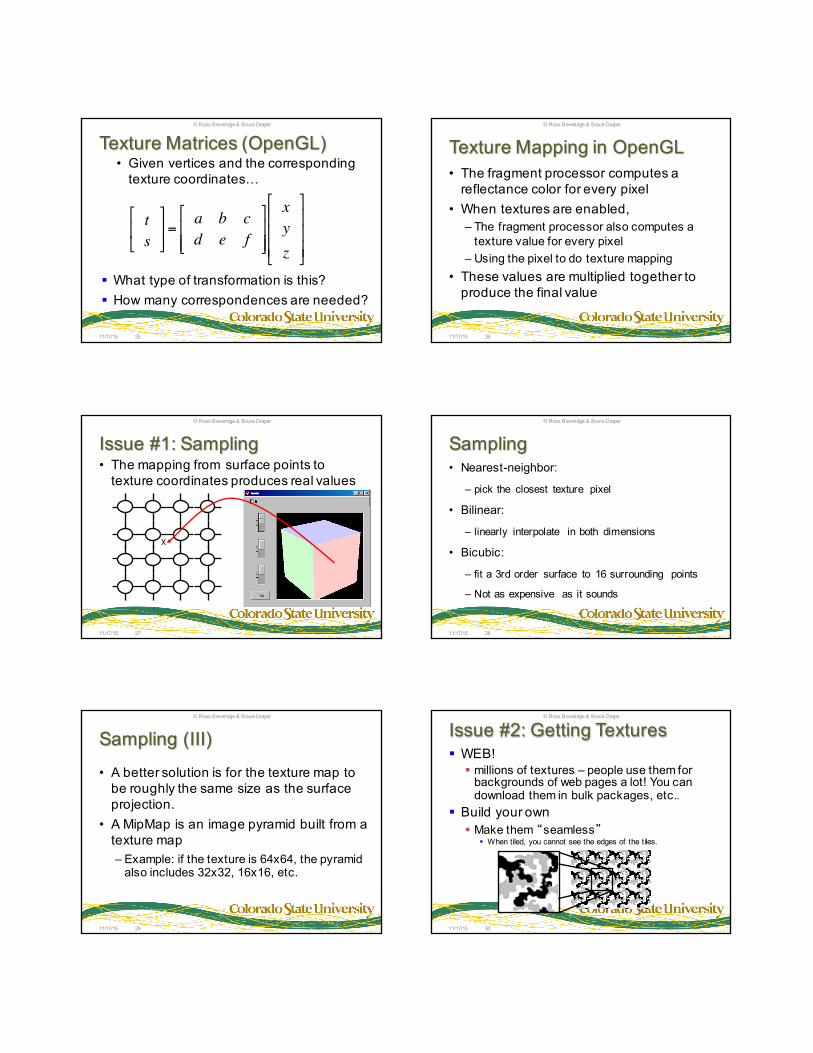
Texture Matrices (OpenGL)
11/17/15
© Ross Beveridge & Bruce Draper
25
• Given vertices and the corresponding texture coordinates…
ts
!
"#
$
%&=
a b cd e f
!
"##
$
%&&
xyz
!
"
###
$
%
&&&
§ What type of transformation is this?§ How many correspondences are needed?
Texture Mapping in OpenGL• The fragment processor computes a
reflectance color for every pixel• When textures are enabled,
– The fragment processor also computes a texture value for every pixel
– Using the pixel to do texture mapping• These values are multiplied together to
produce the final value
11/17/15
© Ross Beveridge & Bruce Draper
26
Issue #1: Sampling• The mapping from surface points to
texture coordinates produces real values
11/17/15
© Ross Beveridge & Bruce Draper
27
X
Sampling• Nearest-neighbor:
– pick the closest texture pixel
• Bilinear:
– linearly interpolate in both dimensions
• Bicubic:
– fit a 3rd order surface to 16 surrounding points
– Not as expensive as it sounds
11/17/15
© Ross Beveridge & Bruce Draper
28
Sampling (III)
• A better solution is for the texture map to be roughly the same size as the surface projection.
• A MipMap is an image pyramid built from a texture map– Example: if the texture is 64x64, the pyramid
also includes 32x32, 16x16, etc.
11/17/15
© Ross Beveridge & Bruce Draper
29
Issue #2: Getting Textures
11/17/15
© Ross Beveridge & Bruce Drape
30
§ WEB!§ millions of textures – people use them for
backgrounds of web pages a lot! You can download them in bulk packages, etc..
§ Build your own§ Make them “seamless”
§ When tiled, you cannot see the edges of the tiles.
Just for example …
11/17/15
© Ross Beveridge & Bruce Draper
31
Texture Makers• There are tons of them.. Some examples:
– ftp://zdftp.zdnet.com/pub/private/sWlIB/graphics_multimedia_tools/graphics_tools/terltx32.zip
– http://www.backgroundmagic.com/software/BGM.zip
– http://www.metaworkshop.com/ftp/twinst.zip– http://216.156.212.112/photoseam.exe
11/17/15
© Ross Beveridge & Bruce Draper
32
More Examples
11/17/15
© Ross Beveridge & Bruce Draper
33
Surface Textures
11/17/15
© Ross Beveridge & Bruce Draper
34
Texture Map from Image
11/17/15
© Ross Beveridge & Bruce Draper
35