resumen funcionamien level-trol fisher 2500
DESCRIPTION
REsumen de funcionamiento de controladores de nivel Fisher 2550TRANSCRIPT

Entrenamiento Fisher 2500 – Febrero 2013 Equipo de instrumentos Cuenca Austral
2/24/2013 1 Alfa Ingeniería y Servicios para la Industria – www.alfasantacruz.com

2/24/2013 2 Alfa Ingeniería y Servicios para la Industria – www.alfasantacruz.com
AGENDA
– Sensor 249, Aspectos Generales.
– Principio de Arquímedes.
– Sensor 249, Descripción, elementos constitutivos, tipos.
– Controlador 2500, Aspectos Generales.
– Controlador 2500, Principio de funcionamiento
– Calibración
Nota: Emerson y Fisher son marcas registradas de Emerson Electric Co, todos los derechos reservados.

2/24/2013 3 Alfa Ingeniería y Servicios para la Industria – www.alfasantacruz.com
Fisher 2500-249 - Generalidades
• Que es ..? El instrumento Fisher 2500-249, es un sistema neumático de control de nivel basicamente que se utiliza siempre en donde un sistema robusto, confiable y de construcción y funcionamiento simple se requiera
• Para que se usa..? Su campo de aplicación esta fundamentalmente en el control de nivel de líquido, nivel de interfaz o densidad.
La robustez de estos productos se demuestra por su utilización en muchos tipos de aplicaciones exigentes, incluidos los de la industria alimenticia, de procesos químicos, petróleo-gas y petroquímica

2/24/2013 4 Alfa Ingeniería y Servicios para la Industria – www.alfasantacruz.com
Fisher 2500-249 - Generalidades
• Como esta compuesto..?
Controlador Serie 2500
Fisher 249B Sensor con Jaula
Transmisor DLC 3010

2/24/2013 5 Alfa Ingeniería y Servicios para la Industria – www.alfasantacruz.com
Fisher 2500-249 - Generalidades
SENSORES sin jaula para montaje lateral o superior en el s eparador
Sensor standard para montaje en el lado del separador con desplazador dentro de la jaula
L3, para montaje superior o para jaula suministrada por el cliente
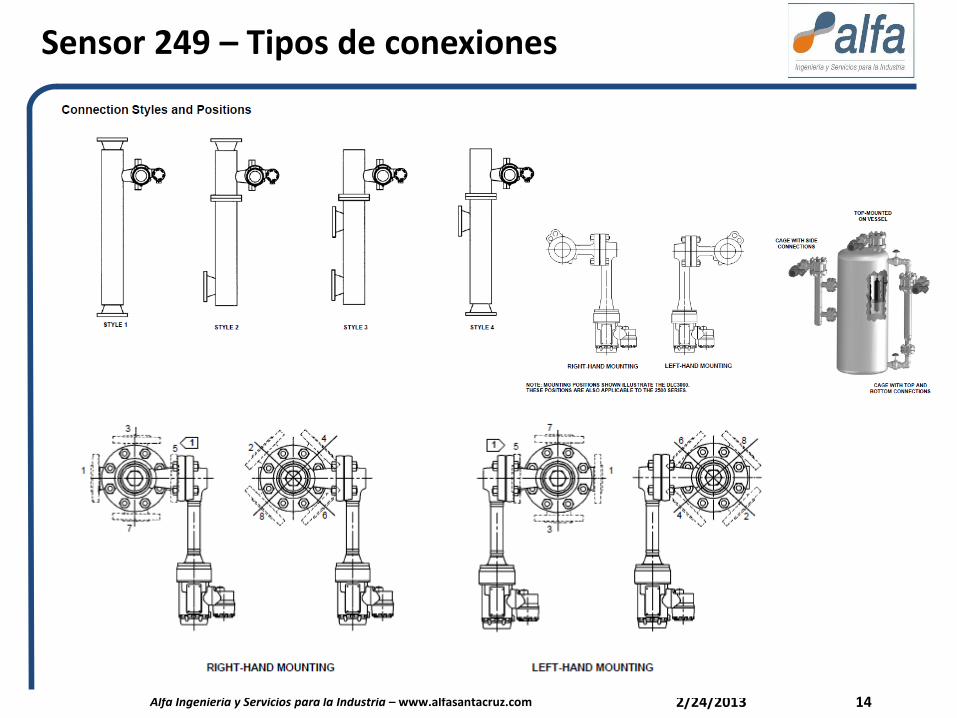
• Las configuraciones típicas del instrumento, sensor con jaula y sin jaula se muestran a continuación .
• El instrumento con jaula proporciona un funcionamiento más estable que los sin jaula. Son utilizados en aplicaciones en donde obstrucciones o turbulencia interna considerable afectaría el funcionamiento.
• Los equipos sin jaula se utilizan generalmente en aplicaciones de interfaz de control que requieren grandes desplazadores que son más fácilmente acomodados por conexiones de brida hasta NPS 8. La disponibilidad de los diferentes longitudes desplazador permite bajarlo para alcanzar la profundidad del recipiente o separador.
2/24/2013 6 Alfa Ingeniería y Servicios para la Industria – www.alfasantacruz.com
Principio de Arquímedes
El principio de Arquímedes es un principio físico que afirma que: «Un cuerpo total o parcialmente sumergido en un fluido en reposo, recibe un empuje de abajo hacia arriba igual al peso del volumen del fluido que desaloja». Esta fuerza recibe el nombre de empuje hidrostático o de Arquímedes, y se mide en Newtons (en el SIU). El principio de Arquímedes se formula así:
Donde E es el empuje , ρf es la densidad del fluido, V el «volumen de fluido desplazado» por algún cuerpo sumergido parcial o totalmente en el mismo, g la aceleración de la gravedad y m la masa, de este modo, el empuje depende de la densidad del fluido, del volumen del cuerpo y de la gravedad existente en ese lugar. El empuje (en condiciones normales y descrito de modo simplificado) actúa verticalmente hacia arriba y está aplicado en el centro de gravedad del fluido desalojado por el cuerpo; este punto recibe el nombre de centro de carena.

2/24/2013 7 Alfa Ingeniería y Servicios para la Industria – www.alfasantacruz.com
Principio de Arquímedes
• Ley física que establece que cuando un objeto se sumerge total o parcialmente en un líquido, éste experimenta un empuje hacia arriba igual al peso del líquido desalojado. La mayoría de las veces se aplica al comportamiento de los objetos en agua, y explica por qué los objetos flotan y se hunden y por qué parecen ser más ligeros en este medio.
• El concepto clave de este principio es el `empuje', que es la fuerza que actúa hacia arriba reduciendo el peso aparente del objeto cuando éste se encuentra en el agua.
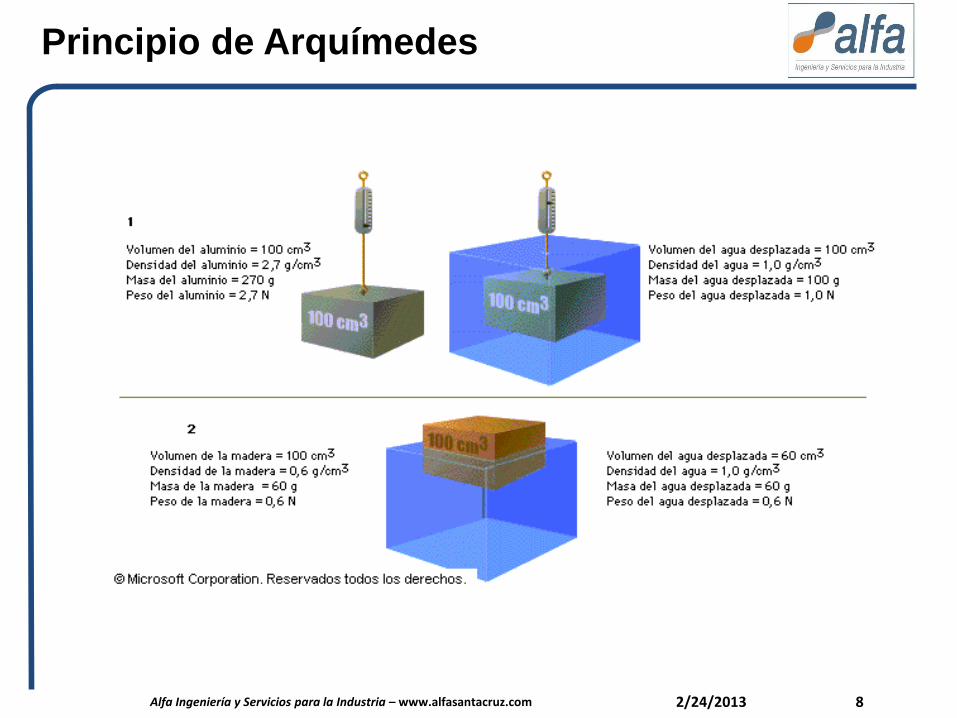
• Por ejemplo, si un bloque metálico que posee un volumen de 100 cm3 se hunde en agua, desplazará un volumen similar de agua cuyo peso aproximado es 1 N. Por tanto, el bloque parecerá que pesa 1 N menos.
• Un objeto flota si su densidad media es menor que la densidad del agua. Si éste se sumerge por completo, el peso del agua que desplaza (y, por tanto, el empuje) es mayor que su propio peso, y el objeto es impulsado hacia arriba y hacia fuera del agua hasta que el peso del agua desplazada por la parte sumergida sea exactamente igual al peso del objeto flotante. Así, un bloque de madera cuya densidad sea 1/6 de la del agua, flotará con 1/6 de su volumen sumergido dentro del agua, ya que en este punto el peso del fluido desplazado es igual al peso del bloque.
• Por el principio de Arquímedes, los barcos flotan más bajos en el agua cuando están muy cargados (ya que se necesita desplazar mayor cantidad de agua para generar el empuje necesario).
• Además, si van a navegar en agua dulce no se pueden cargar tanto como si van a navegar en agua salada, ya que el agua dulce es menos densa que el agua de mar y, por tanto, se necesita desplazar un volumen de agua mayor para obtener el empuje necesario. Esto implica que el barco se hunda más.
2/24/2013 8 Alfa Ingeniería y Servicios para la Industria – www.alfasantacruz.com
Principio de Arquímedes

2/24/2013 9 Alfa Ingeniería y Servicios para la Industria – www.alfasantacruz.com
Sensor 249 - Descripción
• El conjunto de tubo de torsión y el desplazador proporcionan indicación de nivel de líquido, el nivel de la interfaz o la densidad / específica la gravedad.
• Consiste en un tubo de par hueco con un eje soldado en su interior en un extremo y que sobresale de ella en el otro extremo.
Desplazador
Variloto o Jaula
Varilla del Desplazador
Tubo de torsión
Cabezal rotativo
Coinete
Conjunto del eje del desplazador
Tubo de torsión
Eje de rotación
Placa de posicionamiento
Soporte del cojinete
2/24/2013 10 Alfa Ingeniería y Servicios para la Industria – www.alfasantacruz.com
Sensor 249 - Descripción
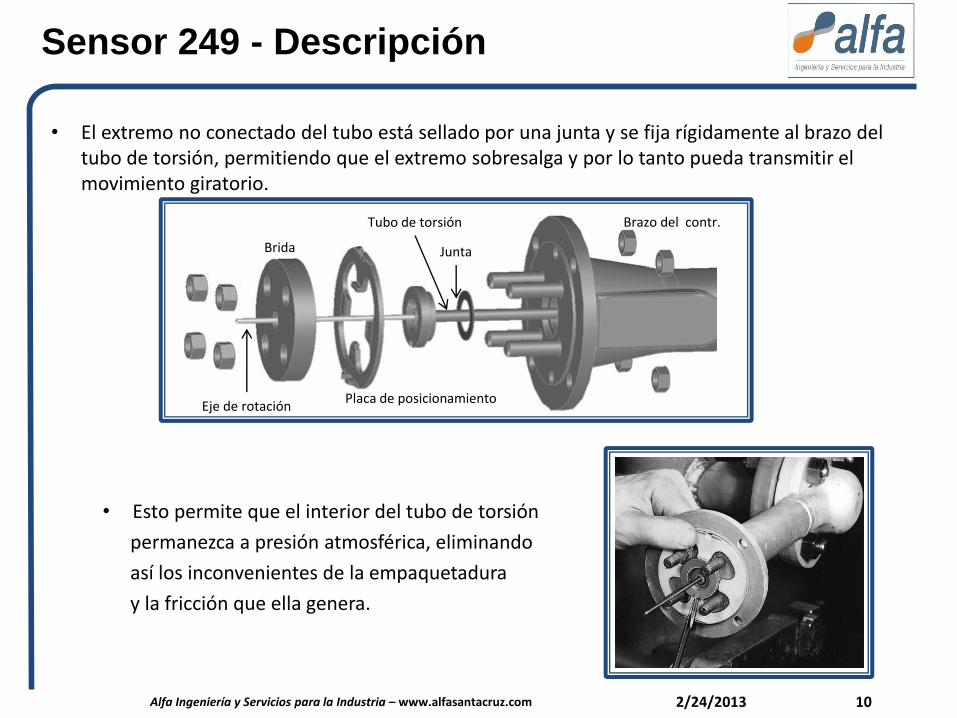
• El extremo no conectado del tubo está sellado por una junta y se fija rígidamente al brazo del tubo de torsión, permitiendo que el extremo sobresalga y por lo tanto pueda transmitir el movimiento giratorio.
• Esto permite que el interior del tubo de torsión
permanezca a presión atmosférica, eliminando
así los inconvenientes de la empaquetadura
y la fricción que ella genera.
Tubo de torsión
Eje de rotación Placa de posicionamiento
Brida Junta
Brazo del contr.

2/24/2013 11 Alfa Ingeniería y Servicios para la Industria – www.alfasantacruz.com
Sensor 249
El desplazador siempre ejerce una fuerza hacia abajo
sobre un extremo de la barra del desplazador. El otro
extremo de la barra del desplazador descansa en el
filo del cojinete tipo cuchillo. Un eje con chaveta en el
extremo del cojinete de la barra del desplazador enca
ja en una cavidad en el exterior del extremo soldado
del conjunto del tubo de torsión.
Un cambio en el nivel de líquido genera una fuerza que
empuja el desplazador hacia arriba igual al peso del
líquido desplazado.
El movimiento vertical correspondiente del desplazador
se transforma en un movimiento angular alrededor de la
varilla que apoya en el cojinete.
Esta rotación es llevado a través del brazo del tubo de
torsión por el eje saliente giratorio. Un controlador o
transmisor acoplado al extremo del eje rotativo convierte
el movimiento rotatorio en diferentes señales neumáticas
o eléctricas. La Figura muestra cómo el controlador o
transmisor se monta en el tubo de torsión el brazo.

2/24/2013 12 Alfa Ingeniería y Servicios para la Industria – www.alfasantacruz.com
Tipo
s de
Sen
sore
s 24
9

2/24/2013 13 Alfa Ingeniería y Servicios para la Industria – www.alfasantacruz.com
Sensor 249 – Dimensiones /Materiales
Los sensores usados para el control de la interfaz o de la densidad puede ser tan grande y pesado que el tubo de torsión no puede soportar completamente su peso en el aire. En la 249VS, un tope de carrera se utiliza para evitar daños.
2/24/2013 14 Alfa Ingeniería y Servicios para la Industria – www.alfasantacruz.com
Sensor 249 – Tipos de conexiones

2/24/2013 15 Alfa Ingeniería y Servicios para la Industria – www.alfasantacruz.com
Contr. 2500 – Generalidades
• Que es ..? El controlador Fisher 2500, es el equipo que ejecuta el control en si del conjunto 2500-249.
• Para que se usa..? Su campo de aplicación esta fundamentalmente en el control de nivel de líquido, nivel de interfaz o densidad.
La robustez de estos productos se demuestra por su utilización en muchos tipos de aplicaciones exigentes, incluidos los de la industria alimenticia, de procesos químicos, petróleo-gas y petroquímica
• Configuraciones disponibles.. – 2500 Controlador de acción proporcional
– 2500C Controlador de acción proporcional con indicador
– 2500R Controlador acción inversa proporcional
– 2500S Controlador brecha diferencial (SNAP acción)
– 2500T-Transmitter
– 2503 Controlador de brecha diferencial sin válvula proporcional, para aplicaciones que requieren muy pequeño ajuste
2/24/2013 16 Alfa Ingeniería y Servicios para la Industria – www.alfasantacruz.com
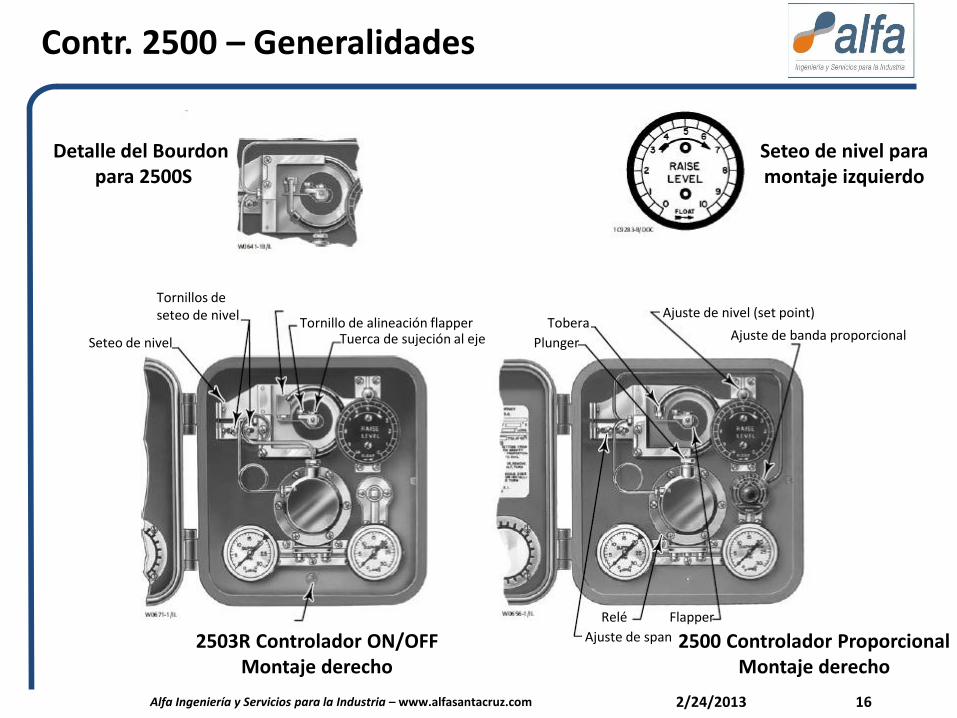
Contr. 2500 – Generalidades
Ajuste de nivel (set point)
Ajuste de banda proporcional Tobera
Plunger
Ajuste de span
Relé Flapper
Tornillo de alineación flapper Tuerca de sujeción al eje Seteo de nivel
Tornillos de seteo de nivel
2503R Controlador ON/OFF Montaje derecho
2500 Controlador Proporcional Montaje derecho
Seteo de nivel para montaje izquierdo
Detalle del Bourdon para 2500S

2/24/2013 17 Alfa Ingeniería y Servicios para la Industria – www.alfasantacruz.com
Contr. 2500 – Generalidades
• Señal de Entrada
– Nivel de líquido o nivel de interface líquida de 0 a 100% de la longitud del desplazador (longitudes estándar de sensores son 356 mm o 812 mm, 14 pulgadas o 32)
– Densidad del fluido, de 0 a 100% de la fuerza de desplazamiento obtenida con volumen de un desplazador dado (el volumen estándar para desplazadores se enumeran en el cuadro)
• Señal de salida
– Para el 2500 y 2500T, 0.2 to 1 bar (3 to 15 psig) or 0.4 to 2 bar (6 to 30 psig)
– 2500S y 2503 Control. del Gap Diferencial, 0 bar (0psig) cuando esta switched off y salida máxima cuando esta switched on 1.4 o 2.4 bar (20 or 35 psig)

2/24/2013 18 Alfa Ingeniería y Servicios para la Industria – www.alfasantacruz.com
Contr. 2500 – Ppio. de funcionamiento
• La figura muestra un diagrama esquemático de un controlador neumático proporcional (de tipo fuerza-distancia).
• El amplificador de tobera-aleta es el amplificador de la primera etapa y la presión trasera de la tobera se controla mediante la distancia de la tobera-aleta. El amplificador de tipo relevador (relé) constituye el amplificador de la segunda etapa.
• La presión trasera de la tobera determina la posición de la válvula de diafragma para el amplificador de la segunda etapa, que es capaz de manejar una cantidad grande de flujo de aire.

2/24/2013 19 Alfa Ingeniería y Servicios para la Industria – www.alfasantacruz.com
Contr. 2500 – Ppio. de funcionamiento
En la mayor parte de los controladores neumáticos, se emplea algún tipo de realimentación neumática. La realimentación de la salida neumática reduce la cantidad de movimiento real de la aleta. En lugar de montar la aleta en un punto fijo, como se aprecia en la figura (b), suele colocarse como pivote en los fuelles de realimentación, como se observa en la figura (c). La cantidad de realimentación se regula introduciendo un enlace variable entre el fuelle de realimentación y el punto de conexión de la aleta. A su vez la aleta se convierte en un enlace flotante. Se mueve tanto por la señal de error como por la señal de realimentación. La operación del controlador de la figura (a) es la siguiente. La señal de entrada para el amplificador neumático de dos etapas es la señal de error. El incremento en la señal de error mueve la aleta hacia la izquierda. Este movimiento, a su vez, aumenta la presión trasera de la tobera y la válvula de diafragma se mueve hacia abajo. Esto provoca un aumento en la presión de control. Este incremento provoca que el fuelle F se expanda y mueva la aleta hacia la derecha, con lo cual se abre la tobera. Debido a esta realimentación, el desplazamiento de tobera- aleta es muy pequeño, pero el cambio en la presión de control puede ser grande. Debe señalarse que la operación adecuada del controlador requiere que el fuelle de realimentación mueva la aleta
menos que el movimiento provocado por la pura señal de error.

2/24/2013 20 Alfa Ingeniería y Servicios para la Industria – www.alfasantacruz.com
Contr. 2500 – Ppio. de funcionamiento

2/24/2013 21 Alfa Ingeniería y Servicios para la Industria – www.alfasantacruz.com
Contr. 2500 – Ppio. de funcionamiento
El controlador recibe el cambio en el nivel de fluido, el nivel de la interfaz, o la densidad a partir del cambio en la fuerza de empuje que ejerce el líquido sobre el desplazador sensor. El desplazador, a través de una articulación mecánica, imparte un movimiento de rotación al eje del tubo de torsión. Este movimiento de giro posiciona el flapper de en la tobera y el Bourdon envía una señal neumática a la válvula de relé. La presión de suministro se aplica al relé desde el regulador (FR67), como se muestra. El relé tiene una restricción fija a través del cual se presuriza la zona del diafragma y el canal interior del tubo de Bourdon.
Estado Estable En una condición de estado estable, el nivel de proceso tiene el tubo de torsión y al flapper adjunto en una posición estable respecto de la tobera . Esto permite que la presión escape entre la tobera y el flapper a la misma velocidad que pasa por la restricción. El diafragma sostiene el extremo de entrada de la válvula del relé ligeramente abierto para compensar el drenaje de presión de la válvula proporcional y mantiene en posición estable el elemento de control final. La presión de salida, a través de la válvula proporcional de tres vías, afecta al canal exterior del tubo Bourdon, sosteniendo al mismo en una posición de estado estacionario.
Aumento del Nivel Un cambio de nivel de proceso sube o baja el desplazador, moviendo el flapper con respecto a la tobera. Si el nivel de proceso se incrementa aumenta la presión de la tobera, el diafragma se mueve hacia abajo, lo que cierra el lado del venteo y abre el extremo de entrada del relé. Esta acción aumenta la presión de salida para el elemento de control final. Puesto que la relación del área del diafragma grande para con el pequeño es de tres a uno, el pequeño diafragma amplifica la acción de cambio de la presión de salida. La válvula proporcional de tres vías permite que el aumento de la presión de salida sea sensado popr el canal exterior del tubo Bourdon. La expansión del tubo Bourdon mueve la tobera fuera del flapper y desacelera la respuesta del circuito neumático.

2/24/2013 22 Alfa Ingeniería y Servicios para la Industria – www.alfasantacruz.com
Contr. 2500 – Ppio. de funcionamiento
Disminución del Nivel Si el nivel de proceso disminuye, también disminuye la presión de la tobera y el diafragma grande se mueve hacia arriba. Esta acción cierra el extremo de entrada de presión y se abre el extremo de escape de la válvula de relé, que permite que la presión de salida escape. Esta acción de la válvula relé reduce la presión de salida para el elemento de control final y es la inversa de la explicación anterior.
Válvula Proporcional La válvula proporcional de tres vías es ajustable para permitir que todos o algunos de los cambios de presión de salida sean realimentados por el canal exterior del tubo Bourdon, proporcionando un control de banda proporcional. El tubo de Bourdon se mueve para contrarrestar los cambios de presión en la tobera, igualando el diferencial de presión en los diafragmas del relé. La válvula de relé mantiene una presión de salida de acuerdo con el cambio en la variable de proceso. Si la válvula proporcional esta completamente abierta (sentido antihorario) permite realimentación de la señal de salida y produce 100% de respuesta proporcional. Si la válvula proporcional esta completamente cerrada (sentido horario) produce menor respuesta proporcional, ya que parte de la presión de salida escapa por la salida de venteo de la válvula proporcional.

2/24/2013 23 Alfa Ingeniería y Servicios para la Industria – www.alfasantacruz.com
Contr. 2500 – Ppio. de funcionamiento
2/24/2013 24 Alfa Ingeniería y Servicios para la Industria – www.alfasantacruz.com
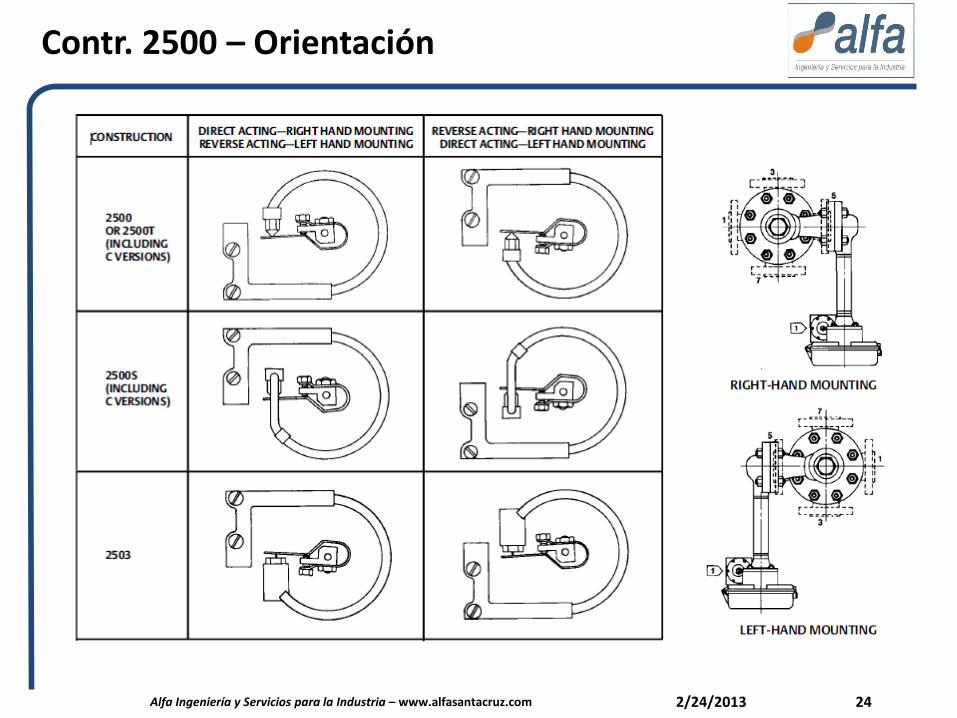
Contr. 2500 – Orientación

2/24/2013 25 Alfa Ingeniería y Servicios para la Industria – www.alfasantacruz.com
Contr. 2500 – Calibración
• Requisitos precalibración El controlador puede ser calibrado en el campo, montado en el recipiente que contiene el fluido de proceso.
Se puede también hacerlo en el taller, pero algún medio para obtener un cambio de fuerza de desplazamiento se debe utilizar
• Calibración con líquido (húmeda)
Retirar todo el conjunto del controlador y el sensor del separador. Para los sensores con jaula, vierta el líquido de calibración en la jaula. Para los sensores sin jaula, suspender el desplazador a una profundidad apropiada en el fluido de calibración. El fluido de calibración, es ideal que posea una gravedad específica igual a la del fluido de proceso. Si es necesario, se puede utilizar agua para la calibración. Se debe compensar la diferencia entre el peso específico del agua y el fluido de proceso. Como ejemplo, supongamos que el fluido de proceso tiene una gravedad específica de 0,7. El peso específico del agua es 1,0. Para simular un nivel de proceso de 50 por ciento del rango de entrada, se requiere un nivel de agua de 35% (50% x 0.7/1.0 = 35%).

2/24/2013 26 Alfa Ingeniería y Servicios para la Industria – www.alfasantacruz.com
Contr. 2500 – Calibración
• Calibración sin líquido (Seca) Quitar el controlador y el brazo del tubo de torsión, como una sola unidad, de la jaula o del recipiente. Entonces, simular la variable de proceso suspendiendo el peso adecuado (tal como una lata de arena) desde el extremo de la barra del desplazador.
• Procedimiento de calibración controlador 2500
1. Aplique presión de alimentación y compruebe que esté ajustado de acuerdo con el valor apropiado (usualmente 20psig).
2. Determine el ajuste de banda proporcional o peso especí
fico como sigue:
Si el equipo tiene tubo de torsión estándar y desplazador
estándar (ver Tabla 7 en Pág. 13) utilice la figura 11 para
encontrar la banda proporcional. Localizar el peso específico
del fluido de proceso en aplicaciones de nivel de líquidos.
Desde esta ubicación, trazar horizontalmente hasta la curva
con el porcentaje deseado de utilización del desplazador, a
continuación, rastrear verticalmente hacia abajo para
determinar el valor de seteo inicial

2/24/2013 27 Alfa Ingeniería y Servicios para la Industria – www.alfasantacruz.com
Contr. 2500 – Calibración
3. Ajuste el NIVEL de Set deseado en el valor adecuado según la tabla.
4. Setear la variable de proceso al valor mínimo del rango de entrada.
5. Ajustar el flapper para obtener la presión correspondiente que figura a continuación.
• Para 2500 de acción directa 0,2 bar (3 psig) para un rango 0,2 a 1,0 bar (3 a 15 psig) de salida o 0,4 bar (6 psig) para un rango 0,4 a 2,0 bar (6 a 30 psig) de salida.
• Para 2500 de acción inversa 1,0 bar (15 psig) para un rango 0,2 a 1,0 bar (3 a 15 psig) de salida o 2,0 bar (30 psig) para un rango de 0,4 a 2,0 bar (6 a 30 psig) de salida.
4. Setear la variable de proceso al valor máximo del rango de entrada
5. Ajustar el flapper para obtener la presión correspondiente que figura a continuación.
• Para 2500 de acción directa 1 bar (15 psig) para un rango 0,2 a 1,0 bar (3 a 15 psig) de salida o 2 bar (30 psig) para un rango 0,4 a 2,0 bar (6 a 30 psig) de salida.
• Para 2500 de acción inversa 0,2 bar (3 psig) para un rango 0,2 a 1,0 bar (3 a 15 psig) de salida o 0,4 bar (6 psig) para un rango de 0,4 a 2,0 bar (6 a 30 psig) de salida.

2/24/2013 28 Alfa Ingeniería y Servicios para la Industria – www.alfasantacruz.com
MUCHAS GRACIAS…!!!