residuensatz, laplace- und z-transformationherfort/bakk/robin.pdf · michael robin 1 vorwort 1...
TRANSCRIPT

Residuensatz, Laplace- und Z-Transformation
Michael Robin
Inhaltsverzeichnis
1 Vorwort 1
2 Residuensatz 22.1 Laurententwicklung . . . . . . . . . . . . . . . . . . . . . . . . . . 22.2 Residuum und Residuensatz . . . . . . . . . . . . . . . . . . . . . 32.3 Berechnung des Residuums . . . . . . . . . . . . . . . . . . . . . 4
2.3.1 Allgemein . . . . . . . . . . . . . . . . . . . . . . . . . . . 42.3.2 Spezialfall . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.4 Partialbruchzerlegung mittels Residuensatz . . . . . . . . . . . . 6
3 Laplacetransformation 83.1 Definition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83.2 Existenz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93.3 Laplacetransformation fur τ → jτ . . . . . . . . . . . . . . . . . 103.4 Eigenschaften . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
3.4.1 Linearitat . . . . . . . . . . . . . . . . . . . . . . . . . . . 113.4.2 Zeitdehnung . . . . . . . . . . . . . . . . . . . . . . . . . . 113.4.3 Zeitverschiebung . . . . . . . . . . . . . . . . . . . . . . . 123.4.4 Zeitdifferentiation . . . . . . . . . . . . . . . . . . . . . . 133.4.5 Zeitintegration . . . . . . . . . . . . . . . . . . . . . . . . 14
3.5 Differentialgleichungen losen . . . . . . . . . . . . . . . . . . . . . 143.6 Rucktransformation und Residuensatz . . . . . . . . . . . . . . . 163.7 Faltungssatz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183.8 Anfangswertsatz . . . . . . . . . . . . . . . . . . . . . . . . . . . 183.9 Endwertsatz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
4 Z-Transformation 204.1 Herleitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 204.2 Existenz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 214.3 Verschiebungsregel . . . . . . . . . . . . . . . . . . . . . . . . . . 234.4 Differenzengleichungen losen . . . . . . . . . . . . . . . . . . . . . 244.5 Rucktransformation . . . . . . . . . . . . . . . . . . . . . . . . . 254.6 Faltungssumme . . . . . . . . . . . . . . . . . . . . . . . . . . . . 264.7 Anfangswertsatz . . . . . . . . . . . . . . . . . . . . . . . . . . . 274.8 Endwertsatz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 274.9 Eindeutigkeit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
5 Weitere Integraltransformationen 305.1 Allgemein . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 305.2 Zweiseitige Laplacetransformation . . . . . . . . . . . . . . . . . 315.3 Zweiseitige Z-Transformation . . . . . . . . . . . . . . . . . . . . 325.4 Fouriertransformation . . . . . . . . . . . . . . . . . . . . . . . . 335.5 Hilberttransformation . . . . . . . . . . . . . . . . . . . . . . . . 33
6 Literatur- und Abbildungsverzeichnis 38

Michael Robin 1 VORWORT
1 Vorwort
Der Residuensatz ist ein essentielles Werkzeug der komplexen Analysis. Es wirdgezeigt, welche Voraussetzungen getroffen werden mussen, wie man ihn her-leitet und wie man ihn anwendet. Angefangen bei der Laurentreihe, uber dasResiduum, wird eine Methode zur Herleitung der Partialbruchzerlegung gezeigt.
Anschließend folgt die Behandlung der Laplacetransformation. Letzteres ist furdie Automatisierungstechnik und Signaltheorie unerlasslich. Es werden, ausge-gangend von der Definition und Existenz, wichtige Eigenschaften gezeigt, sowiederen Bedeutung zum Losen von Differentialgleichungen erlautert. Man kannSysteme mit langwierig losbaren Differentialgleichungen auf algebraische Weisebehandeln. Man muss jedoch den Umweg in den Bildbereich machen, und hierist der Residuensatz bei der Rucktransformation behilflich.
Wichtig, wegen der fortschreitenden Digitalisierung, ist die Z-Transformation.Diese beruht auf einer Diskretisierung der Laplacetransformation. Etwaige Ana-logien werden gezeigt.
Abschließend wird noch etwas Allgemeines uber Integraltransformationen ge-sagt und eine spezielle herausgegriffen und besprochen.
Die Notation wurde durchgehend auf die an unserer TU gebrauchlichen Ter-minologie abgestimmt.
1

Michael Robin 2 RESIDUENSATZ
2 Residuensatz
2.1 Laurententwicklung
Falls eine Funktion F (s) holomorph in einer Umgebung a in der komplexenEbene ist, lasst sie sich in eine Potenzreihe in a entwickeln.
F (s) = c0 + c1(s− a) + c2(s− a)2 + · · · =∞∑k=0
ck(s− a)k
Ist F (s) meromorph, so lasst sie sich nun als Bruch zweier holomorpherFunktionen Q(s)/P (s) anschreiben. Angenommen Q(s) hatte eine Nullstelle m-ter Ordnung, und P (s) hatte eine Nullstelle p-ter Ordnung, wobei p > m gelte:
F (s) =Q(s)
P (s)=Qm(s− a)m +Qm+1(s− a)m+1 + . . .
Pp(s− a)p + Pp+1(s− a)p+1 + . . .
Dann konnen wir nun offensichtlich herausheben
=1
(s− a)p−mQm +Qm+1(s− a) + . . .
Pp + Pp+1(s− a) + . . .︸ ︷︷ ︸meromorph in a
und erhalten wieder eine in a meromorphe Funktion. Da der Nenner nundort keine Nullstelle hat, lasst sich dies in eine Potenzreihe um a entwickeln.Zur Vereinfachung sei n = p−m gesetzt:
1
(s− a)n[c0 + c1(s− a) + · · ·+ cn(s− a)n + . . . ]
=c0
(s− a)n+
c1(s− a)n−1
+ · · ·+ cn + cn+1(s− a) . . .
Es ist ublich, die Koeffizienten umzunummerieren: c0 = c−n, c1 = c−n+1, . . .
=c−n
(s− a)n+
c−(n−1)
(s− a)n−1+ · · ·+ c0 + c1(s− a) . . .
=
∞∑k=−n
ck(s− a)k
Man nennt den Reihenanteil mit negativen k die Hauptreihe der Laurentrei-he.
Die Koeffizienten lassen sich nun zum Beispiel uber Koeffizientenvergleichwie folgt bestimmen. Zur Vereinfachung sei nun (s− a) = z gesetzt.
F (s) =1
znQm +Qm+1z + . . .
Pp + Pp+1z + . . .
c0 + c1z + · · · = Qm +Qm+1z + . . .
Pp + Pp+1z + . . .
(c0 + c1z + . . . )(Pp + Pp+1z + . . . ) = Qm +Qm+1z + . . .
Somit ergibt sich:c0Pp = Qm
2
Michael Robin 2 RESIDUENSATZ
Den Koeffizienten c1 erhalten wir uber den Vergleich mit den Koeffizienten vonz:
c0Pp+1 + c1Pp = Qm+1
So erhalt man die gesamte Laurentreihe durch sukkzessives einsetzen. Wirwerden spater sehen, dass wir selten an der gesamten Laurentreihe interessiertsind.
2.2 Residuum und Residuensatz
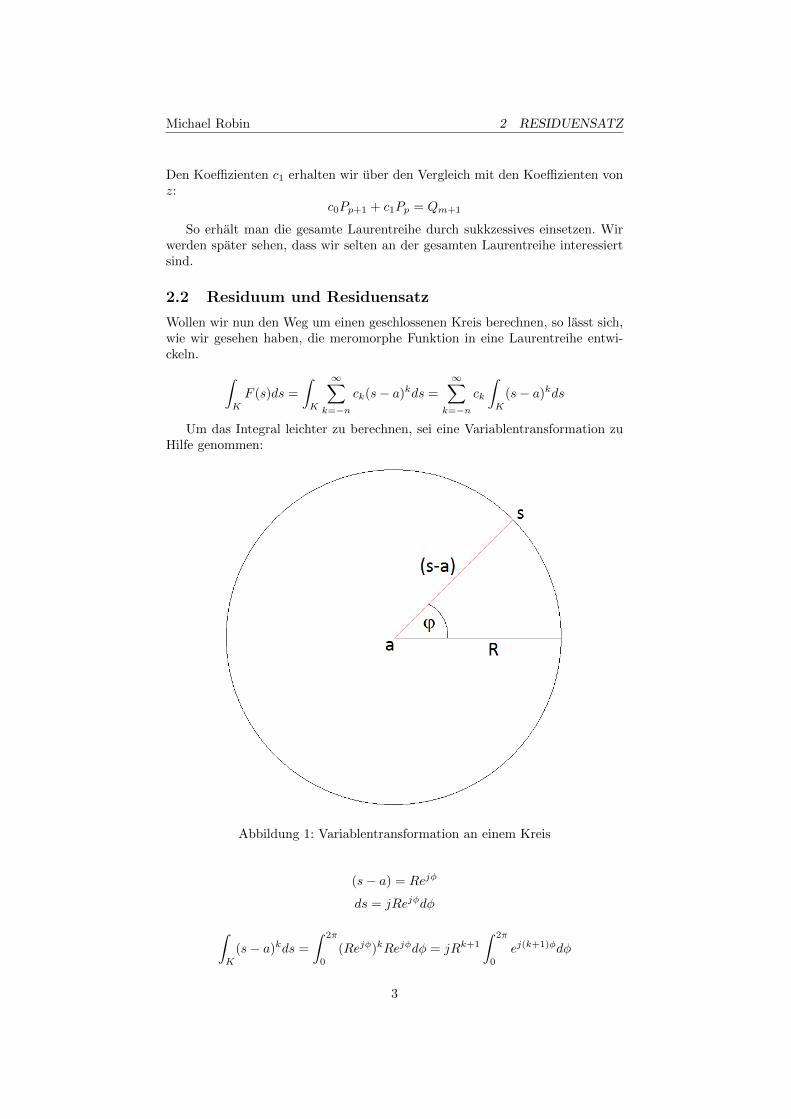
Wollen wir nun den Weg um einen geschlossenen Kreis berechnen, so lasst sich,wie wir gesehen haben, die meromorphe Funktion in eine Laurentreihe entwi-ckeln. ∫
K
F (s)ds =
∫K
∞∑k=−n
ck(s− a)kds =
∞∑k=−n
ck
∫K
(s− a)kds
Um das Integral leichter zu berechnen, sei eine Variablentransformation zuHilfe genommen:
Abbildung 1: Variablentransformation an einem Kreis
(s− a) = Rejφ
ds = jRejφdφ
∫K
(s− a)kds =
∫ 2π
0
(Rejφ)kRejφdφ = jRk+1
∫ 2π
0
ej(k+1)φdφ
3

Michael Robin 2 RESIDUENSATZ
Wir mussen hier nun zwei Falle unterscheiden. Falls k + 1 6= 0, so ist:
jRk+1ej(k+1)2π
j(k + 1)− jRk+1e0
j(k + 1)= 0
Da ejk2π = 1 fur beliebige Werte von k ist, verschwindet das Integral iden-tisch.
Im anderen Fall sei k + 1 = 0:∫K
ds
s− a=
∫ 2π
0
jRejφ
Rejφdφ = j2π
Die Exponentialfunktion wird zu 1 und wir erhalten als Ergebnis j2π.Was bedeutet das nun fur uns? Alle Koeffizienten, außer bei dem wo die
Exponentialfunktion zu 1 wird, verschwinden.Wir fassen zusammen: ∫
K
F (s)ds = j2πc−1
Man nennt den Koeffizienten c−1 das Residuum.
2.3 Berechnung des Residuums
2.3.1 Allgemein
Wir sind also lediglich an dem Koeffizienten c−1 interessiert. Es gilt, falls es sichum einen Pol der Ordnung n handelt, folgende Formel:
c−1 =1
(n− 1)!lims→a
dn−1
dsn−1F (s)(s− a)n
Beweis:Da F(s) meromorph ist, lasst sie sich in eine Laurentreihe entwickeln:
F (s) =
∞∑k=−n
ck(s− a)k
Wenn wir nun auf beiden Seiten mit (s− a)n multiplizieren und (n− 1) malnach s ableiten, erhalten wir:
dn−1
dsn−1F (s)(s− a)n =
dn−1
dsn−1
∞∑k=−n
ck(s− a)k+n
Nun wird eine Indexverschiebung k = l − n beziehungsweise l = k + ndurchgefuhrt:
=
∞∑l=0
cl−ndn−1
dsn−1(s− a)l
Nach mehrmaligen Ableiten ergibt sich somit1:
=
∞∑l=n−1
cl−nl(l − 1) . . . (l −m+ 2)(s− a)l−n+1
1Da die konstanten Terme beim Ableiten wegfallen, muss somit auch die untere Grenzeverschoben werden
4

Michael Robin 2 RESIDUENSATZ
Nach erneuter Variablentransformation k = l − n + 1, beziehungsweise l =k + n− 1 ergibt sich:
=
∞∑k=0
(k + 1)(k + 2) . . . (k + n− 1)ck−1(s− a)k
Bei s→ a fallen alle Summanden fur k 6= 0 weg. Bei k = 0 ergibt sich:
dn−1
dsn−1F (s)(s− a)n = (n− 1)! c−1
Womit der Beweis erbracht wurde.
2.3.2 Spezialfall
Eine einfachere Berechnung ergibt sich falls es sich um einen Pol erster Ordnunghandelt, indem wir F (s) in einen Quotienten aus Q(s)/P (s) aufspalten:
c−1 = lims→a
F (s)(s− a) = lims→a
Q(s)
P (s)(s− a)
Nachdem P (a) = 0 ist, andert es nichts am Nenner, wenn man es subtrahiert:
c−1 = lims→a
Q(s)(s− a)
P (s)− P (a)
Die Regel von de L’Hospital ergibt:
= Q(a)1
P ′(a)
Somit folgt furs Residuum bei Pol erster Ordnung die folgende Beziehung:
c−1 =Q(a)
P ′(a)
5

Michael Robin 2 RESIDUENSATZ
2.4 Partialbruchzerlegung mittels Residuensatz
Falls wir voraussetzen konnen, dass unsere Funktion meromorph in einer Umge-bung von a in der komplexen Ebene ist, wird wieder eine Laurentreihe aufstell-bar sein. Nachdem es sich nun jedoch um mehrere Umgebungen von a1, a2, ...handeln kann, wird sich eine Summe aus Laurentreihen bilden.
F (s) =
∞∑k1=−n1
ck1(s− a1)k1 +
∞∑k2=−n2
ck2(s− a2)k2 +
∞∑k3=−n3
ck3(s− a3)k3 + ...
Bei einer Partialbruchzerlegung, will man eine Form erreichen, bei der Termemit getrennten Polen auftauchen.2
F (s) =A1
s− a1+
A2
s− a2+
A3
s− a3+ ...
Nehmen wir weiterhin an, dass die Pole in der Form |a1| < |a2| < |a3| < ...sortiert seien. Wahlen wir nun einen Weg K1, welcher lediglich a1 einschließt,so erhalten wir das Residuum fur die erste Laurentreihe mit a1, jedoch 0 fur dieanderen.
∫K1
F (s)ds = j2πRes(F (s), a1) =
∫K1
A1
s− a1ds+
∫K1
A2
s− a2ds+
∫K1
A3
s− a3ds+...
Da lediglich a1 vom Weg K1 eingeschlossen wird, fallen auch auf der rechtenSeite alle Terme weg, und wahlen wir der Einfachkeit halber einen Kreis alsWeg, so ergibt sich, wie vorhin beim Residuensatz gezeigt:∫
K1
F (s)ds = j2πRes(F (s), a1) = j2πA1
Res(F (s), a1) = A1
Wir haben also den ersten Term der Partialbruchzerlegung mit dem jewei-ligen Residuum identifiziert. Fur A2 erhalten wir analog die Residuen mit demWeg K2, womit gezeigt wurde, dass die Berechnung der Residuen einer Partial-bruchzerlegung zum gewunschten Ergebnis fuhrt. Dies bedeutet nun, wir konnendie Formel der Resudienberechnung aus 2.3.1 anwenden.
Eine wohlmoglich einganglichere Variante der Partialbruchzerlegung mit derFormel des Residuensatzes sei anhand eines Beispiels erklart. Angenommen dierationale Funktion lautet:
F (s) =s2 + 3s
(s+ 1)4=
A
(s+ 1)+
B
(s+ 1)2+
C
(s+ 1)3+
D
(s+ 1)4
D erhalten wir wie gewohnt. Wir multiplizieren mit (s + 1)4 und lassen sgegen den Pol gehen:
lims→−1
[F (s) · (s+ 1)4] = lims→−1
A(s+ 1)3︸ ︷︷ ︸=0
+B(s+ 1)2︸ ︷︷ ︸=0
+C(s+ 1)︸ ︷︷ ︸=0
+D
2Wir wollen einfachheitshalber nur 1-fache Pole betrachten.
6

Michael Robin 2 RESIDUENSATZ
Wenn wir jetzt jedoch einmal nach s ableiten, folgt das folgende:
lims→−1
d
ds[F (s) · (s+ 1)4] = 3A(s+ 1)2︸ ︷︷ ︸
=0
+ 2B(s+ 1)︸ ︷︷ ︸=0
+C
Wir erhalten also C durch einmaliges differenzieren. Wenn wir jetzt jedochnochmal ableiten:
lims→−1
d2
ds2[F (s) · (s+ 1)4] = 6A(s+ 1)︸ ︷︷ ︸
=0
+2B
Wir mussen also mit 1/2 multiplizieren um B zu erhalten.Ein drittes Mal ableiten fuhrt uns somit zu:
lims→−1
d3
ds3[F (s) · (s+ 1)4] = 6A
Nun muss also mit 1/(2·3) multipliziert werden, um das A zu erhalten. Es istnun intuitiv eingangig, dass Pole hoherer Ordnung durch mehrfaches Ableitenund multplizieren mit dem Term 1/n!, wobei n die Anzahl der Ableitungen ist,erhalten werden konnen.
Fur unser Beispiel erhalten wir:
s2 + 3s
(s+ 1)4=
0
(s+ 1)+
1
(s+ 1)2+
1
(s+ 1)3+
−2
(s+ 1)4
7

Michael Robin 3 LAPLACETRANSFORMATION
3 Laplacetransformation
3.1 Definition
Die Laplacetransformation ist eine lineare einseitige Integraltransformation. Wasbedeutet in diesem Zusammenhang einseitig? Hier beschaftigen wir uns mitrechtsseitigen Signalen, was soviel heißt wie, dass das Signal zu einem gewissenZeitpunkt eingeschaltet wird. Dabei darf es sich durchaus sprungartig andern.Der Einfachheit halber legt man den Einschaltzeitpunkt in den Nullpunkt, oderanders formuliert, man schaltet zum Zeitpunkt t = 0 ein.
Wie kann man nun ein rechtsseitiges Signal mathematisch beschreiben? Dafurgibt es eine spezielle Funktion, der Heaviside-Sprung. Dieser ist wie folgt defi-niert:
ε(τ) =
1 , τ > 0
0 , τ < 0
Der Wert fur ε(0) ist frei wahlbar. Oft wird dafur der Wert ε(0) = 1/2 verwen-det. Das hat den Vorteil, dass damit die Sprungfunktion als ungerade Funktionbeschrieben werden kann.
Bildlich gesprochen bedeutet nun eine Multiplikation einer beliebigen stuck-weise stetigen Funktion im Zeitbereich mit dem Heavisidesprung ein Abschnei-den der Werte fur τ < 0.
Die rechtsseitige Laplacetransformation transformiert somit ein rechtsseiti-ges Integral vom Zeitbereich in den sogenannten Bildbereich. Somit muss es auchwieder eine Rucktransformation geben, um vom Bildbereich in den Zeitbereichzuruckkehren zu konnen. Die beiden Integrale lauten:
X(s) =
∫ ∞0−
x(τ)e−sτdτ
x(τ) =1
j2π
∫ σ+∞
σ−∞X(s)esτds
wobei s eine komplexe Variable beschreibt mit s = σ+jν und somit ds = jdν.An dieser Stelle erkennt man als Grund fur die Forderung der Einseitigkeit
die Konvergenz.Die folgende Kurzschreibweise ist ublich:
x(τ) −• X(s)
X(s) •− x(τ)
Man spricht: x(τ) korrespondiert mit X(s) und meint damit, dass die La-placetransformation von x(τ) ein X(s) liefert. Analoges gilt fur die Rucktrans-formation.
8

Michael Robin 3 LAPLACETRANSFORMATION
3.2 Existenz
Es sei die Funktion”stuckweise stetig“, damit das Riemannintegral existiert.
Weiters verlangen wir, dass fur eine Konstante M
|x(τ)| ≤Meaτ
fur alle τ ∈ R+ gilt. Somit ergibt sich fur σ > a die absolute Integrierbarkeit:∫ ∞0−
|x(τ)||e−στ | |e−jντ |︸ ︷︷ ︸=1
dτ
≤∫ ∞
0−
Meaτe−στdτ = M
∫ ∞0−
e(a−σ)τdτ
=
(Me(a−σ)τ
(a− σ)
)∞0−
<∞
Man nennt σ die Konvergenzabszisse. Man vergleiche die Skizze:
Abbildung 2: Konvergenz der Laplacetransformation
9

Michael Robin 3 LAPLACETRANSFORMATION
3.3 Laplacetransformation fur τ → jτ
Ausgehend vom Definitionsintegral
X(s) =
∫ ∞0−
x(τ)e−sτdτ
tauschen wir nun τ gegen −jτ :
X(s) =
∫ j∞
0−x(jτ)e−sjτ jdτ
Da nun s = σ + jν gilt, erhalten wir:
X(s) =
∫ j∞
0−x(jτ)e−(σ+jν)jτ jdτ =
∫ j∞
0−x(jτ)e−jστeνeτ jdτ
Betrachten wir hierfur nun die Konvergenz, so erhalten wir Existenz desIntegrals fur exp(−ν) > exp(τ) bzw −ν > τ .
Der Konvergenzbereich transformiert sich wie folgt:
Abbildung 3: Konvergenz der Laplacetransformation mit τ → jτ
10

Michael Robin 3 LAPLACETRANSFORMATION
3.4 Eigenschaften
Im Folgenden seien einige Eigenschaften behandelt, von denen wir spater einigenGebrauch machen werden.
3.4.1 Linearitat
Die Homogenitat sowie die Additivitat3 ist bei einer linearen Integraltransfor-mation leicht einsehbar.
x(τ) = c1x1(τ) + c2x2(τ) −• X(s) = c1X1(s) + c2X2(s)
Beweis:
X(s) =
∫ ∞0−
x(τ)e−sτdτ =
∫ ∞0−
(c1x1(τ) + c2x2(τ))e−sτdτ
=
∫ ∞0−
c1x1(τ)e−sτ+c2x2(τ)e−sτdτ = c1
∫ ∞0−
x1(τ)e−sτdτ+c2
∫ ∞0−
x2(τ)e−sτdτ
= c1X1(s) + c2X2(s)
3.4.2 Zeitdehnung
Eine beliebte Anwendung der Zeitdehnung ware zum Beispiel bei der Rechteck-funktion wiederzufinden. Da sie konventionell die Flache 1 hat, ist das Rechtecksozusagen 1 hoch (von 0 nach 1) und 1 lang (von -1/2 bis +1/2). Ein idealerTiefpass hat so eine Charakteristik4.
x(aτ) −• 1
|a|X( sa
)Beweis: ∫ ∞
0−x(aτ)e−sτdτ
Mit der Variablentransformation aτ = τ ′, dτ = 1/a dτ ′ erhalten wir:∫ ∞0−
x(τ ′)e−sτ′a
1
|a|dτ ′ =
1
|a|
∫ ∞0−
x(τ)e−sa τdτ
Der Betrag von a kommt von der Fallunterscheidung, da man die Grenzendes Integrals mittransformieren muss! Angenommen a sei positiv:∫ ∞
0−x(τ ′)e−s
τ′a
1
adτ ′
Wenn jedoch das a negativ ist:∫ −∞0−
x(τ ′)e−sτ′a
1
−adτ ′
3Homogenitat(k sei eine Konstante): f(kx) = kf(x); Additivitat: f(x1 + x2) = f(x1) +f(x2).
4Es sollen alle Frequenzen bis zur Grenzfrequenz fg durchgelassen werden, also Multipli-kation mit 1, und alle Frequenzen daruber gesperrt werden, also Multiplikation mit 0.
11

Michael Robin 3 LAPLACETRANSFORMATION
Und Anstelle von 0 nach −∞ in positive τ -Richtung zu integrieren, kann manauch von 0 nach ∞ in negativer τ -Richtung integrieren:∫ ∞
0−x(τ ′)e−s
τ′a
1
−a(−dτ ′)
Was uns schließlich wieder auf∫ ∞0−
x(τ ′)e−sτ′a
1
adτ ′
fuhrt, oder ohne Fallunterscheidung gleich ganz allgemein geschrieben:∫ ∞0−
x(τ ′)e−sτ′a
1
|a|dτ ′
Wenn wir jetzt noch s′ = s/a ersetzen, erkennen wir wieder die Form desLaplacetransformationsintegrals:
=1
|a|
∫ ∞0−
x(τ)e−s′τdτ
was uns schlussendlich auf die gesuchte Korrespondenz bringt:
=1
|a|X(s′) =
1
|a|X( sa
)3.4.3 Zeitverschiebung
Die Zeitverschiebung ist ganz fundamental. So ist auch das Rechteck eine Line-arkombination zweier zeitverschobener Heavisidesprunge5.
x(τ − τ0) −• e−sτ0X(s)
fur τ0 ≥ 0.Beweis: ∫ ∞
0−x(τ − τ0)e−sτdτ
Wir versuchen mittels Variablentransformation τ − τ0 = τ ′ auf die Form einesLaplaceintegrals zu kommen:∫ ∞
0−τ0x(τ ′)e−s(τ
′+τ0)dτ ′
Da wir ja nur rechtsseitige Signale vorausgesetzt haben, verschwindet x(τ ′)auf [−τ0, 0−]: ∫ 0−
−τ0x(τ ′)e−s(τ
′+τ0)dτ ′︸ ︷︷ ︸0
+
∫ ∞0−
x(τ ′)e−s(τ′+τ0)dτ ′
5rect(τ) = ε(τ + 1/2) − ε(τ − 1/2).
12

Michael Robin 3 LAPLACETRANSFORMATION
Da nun weiters exp(−sτ0) nicht von τ abhangt, kann man es aus dem Integralherausziehen und wir erhalten die gesuchte Korrespondenz aus:
=
∫ ∞0−
x(τ ′)e−sτ′e−sτ0dτ ′ = e−sτ0
∫ ∞0−
x(τ)e−sτdτ
= e−sτ0X(s)
3.4.4 Zeitdifferentiation
Nun wollen wir uns ansehen, wie das nach der Zeit abgeleitete Signal sich trans-formiert.
x′(τ) −• sX(s)− x(0−)
Beweis: ∫ ∞0−
x′(τ)e−sτdτ
Um nun wieder das x(τ) zu erhalten, bedienen wir uns der partiellen Inte-gration.
=
x(τ)︸︷︷︸F
e−sτ︸︷︷︸g
∞0−
−∫ ∞
0−x(τ)︸︷︷︸F
e−sτ · (−s)︸ ︷︷ ︸g′
dτ
Da die obere Grenze des ersten Terms 0 wird, bleibt nur noch die untereGrenze uber. Weiters ist s nicht von τ abhangig, und kann somit aus demIntegral gezogen werden, womit man wieder auf die ubliche Form kommt:
= −x(0−) + s
∫ ∞0−
x(τ)e−sτdτ
Womit der Korrespondenz nachgewiesen wurde.
= sX(s)− x(0−)
Sehr leicht zuganglich sind auch Ableitungen hoherer Ordnung. PartielleIntegration, k mal durchgefuhrt, ergibt:
x(k) −• skX(s)− sk−1x(0−)− sk−2x(1)(0−)− · · · − x(k−1)(0−)
Die Bedeutung dieser Korrespondenz: Sie wandelt mit Hilfe der Linearitateine Differentialgleichung in eine algebraische Gleichung im Bildbereich!
Was hat die Laplacetransformation nun fur Vorteile im Bezug aufs Losen vonDifferentialgleichungen? Betrachten wir hierzu nochmals die Korrespondenz:
x′(τ) −• sX(s)− x(0−)
Das x(0−) ist der Anfangszustand! Wir bekommen hier also gratis die An-fangszustande mitgeliefert.
13

Michael Robin 3 LAPLACETRANSFORMATION
3.4.5 Zeitintegration ∫ τ
0−x(τ ′)dτ ′ −• 1
sX(s)
Partielle Integration ergibt:∫ ∞0−
[∫ τ
0−x(τ ′)dτ ′
]e−sτdτ
=
[∫ τ
0−x(τ ′)dτ ′
]︸ ︷︷ ︸
g
(e−sτ
s
)∞0−︸ ︷︷ ︸
F
−∫ ∞
0−x(τ)︸︷︷︸g′
e−sτ
−s︸ ︷︷ ︸F
dτ
= −[x(τ)− x(0−)]
(e−sτ
s
)∞0−
+1
s
∫ ∞0−
x(τ)e−sτdτ
Hier verschwindet der erste Term fur beide Grenzen.
= −0 + [x(0)− x(0)] +1
s
∫ ∞0−
x(τ)e−sτdτ
Somit erhalten wir die gesuchte Korrespondenz:
=1
sX(s)
3.5 Differentialgleichungen losen
Wir beginnen mit einem Beispiel. Es sei die lineare gewohnliche inhomogeneDifferentialgleichung mit konstanten Koeffizenten gegeben:
y′′ + a1y′ + a0y = b1u
′ + b0u
Nun wenden wir unter Zuhilfenahme der Korrespondenz der Zeitdifferentia-tion die Laplacetransformation auf beide Seiten an.
s2Y (s)−sy(0−)−y′(0−)+sa1Y (s)−a1y(0−)+a0Y (s) = sb1U(s)−b1u(0−)+b0U(s)
Umgeformt auf Y (s):
Y (s) =sb1 + b0
s2 + sa1 + a0U(s) +
sy(0−) + y′(0−) + a1y(0−)− b1u(0−)
s2 + sa1 + a0
Wir erhalten also einen Teil der nur vom Eingang U(s) abhangt, und einenTeil, der nur von den Anfangszustanden abhangt. Man bekommt also auf ganznaturliche Weise die Nullzustandsantwort, sowie die Nulleingangsantwort6. Wennalso alle Anfangszustande Null sind, fallt die Nulleingangsantwort weg und derAusgang ergibt sich als eine Funktion mit dem Eingang. Die rationale Funkti-on wird auch Ubertragungsfunktion G(s) genannt, und gibt im speziellen Falls→ jν die komplexe Betragsfrequenzgangsfunktion.
6in Analogie zu Signale und Systeme 1.
14

Michael Robin 3 LAPLACETRANSFORMATION
Es liegt auf der Hand, dass fur die Losung im Zeitbereich lediglich nur nochdie Rucktransformation notwendig ist. Dies ist bei rationalen Funktionen einfachzu bewerkstelligen. Wir fuhren dies an einem Beispiel vor.
Wahlen wir a1 = 5, a0 = 6, b1 = 7, b0 = 3 und fur die Anfangszustandey(0−) = y′(0−) = u(0−) = 1. Also wie folgt:
Y (s) =7s+ 3
s2 + 5s+ 6U(s) +
s+ 1 + 5− 7
s2 + 5s+ 6
Wenn wir den Nenner faktorisieren, erhalten wir also:
Y (s) =7s+ 3
(s+ 2)(s+ 3)U(s) +
s− 2
(s+ 2)(s+ 3)
Betrachten wir den Nullzustandsteil und setzen den Eingang als Heavi-sidesprung an, dessen Laplacetransformierte 1/s betragt und zerlegen diese inPartialbruche, so ergibt sich:
Y0Z(s) =7s+ 3
s(s+ 2)(s+ 3)=A
s+
B
s+ 2+
C
s+ 3
Die Koeffizienten ergeben sich zum Beispiel wie oben beschrieben uber denResiduensatz zu
A = lims→0
Y0Z · (s) =3
2
B = lims→−2
Y0Z · (s+ 2) =11
2
C = lims→−3
Y0Z · (s+ 3) =−18
3= −6
Analog ergibt sich hier die Nulleingangsantwort:
Y0E(s) =s− 2
(s+ 2)(s+ 3)=
D
s+ 2+
E
s+ 3
D = lims→−2
Y0E · (s+ 2) =−4
1= −4
E = lims→−3
Y0E · (s+ 3) =−5
−1= 5
Somit erhalten wir unsere gesamte Antwort als Superposition von Nulleingangs-und Nullzustandsantwort:
Y (s) = Y0Z(s) + Y0E(s) =3
2
1
s+
11
2
1
s+ 2− 6
1
s+ 3− 4
1
s+ 2+ 5
1
s+ 3
Y (s) =3
2
1
s+
3
2
1
s+ 2− 1
s+ 3
Ein Blick in eine Korrespondenztabelle liefert als Rucktransformierte
y(τ) =
(3
2+
3
2e−2τ − e−3τ
)ε(τ)
.
15
Michael Robin 3 LAPLACETRANSFORMATION
3.6 Rucktransformation und Residuensatz
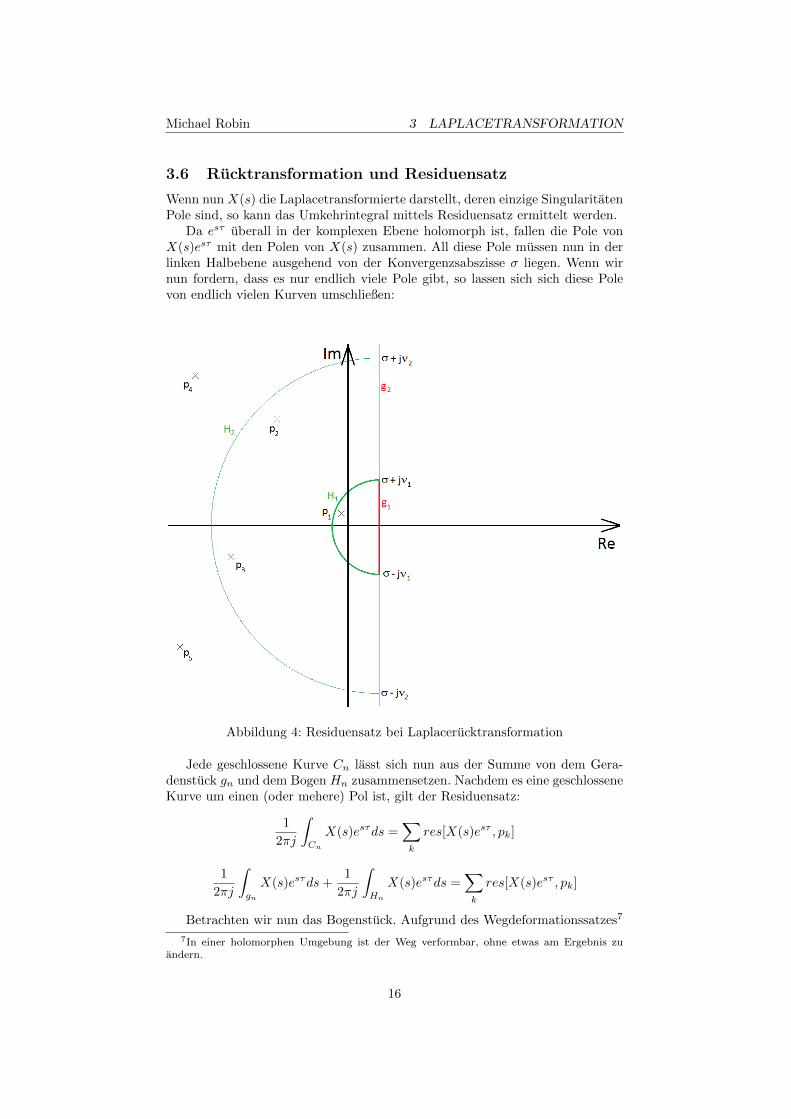
Wenn nun X(s) die Laplacetransformierte darstellt, deren einzige SingularitatenPole sind, so kann das Umkehrintegral mittels Residuensatz ermittelt werden.
Da esτ uberall in der komplexen Ebene holomorph ist, fallen die Pole vonX(s)esτ mit den Polen von X(s) zusammen. All diese Pole mussen nun in derlinken Halbebene ausgehend von der Konvergenzsabszisse σ liegen. Wenn wirnun fordern, dass es nur endlich viele Pole gibt, so lassen sich sich diese Polevon endlich vielen Kurven umschließen:
Abbildung 4: Residuensatz bei Laplacerucktransformation
Jede geschlossene Kurve Cn lasst sich nun aus der Summe von dem Gera-denstuck gn und dem Bogen Hn zusammensetzen. Nachdem es eine geschlosseneKurve um einen (oder mehere) Pol ist, gilt der Residuensatz:
1
2πj
∫Cn
X(s)esτds =∑k
res[X(s)esτ , pk]
1
2πj
∫gn
X(s)esτds+1
2πj
∫Hn
X(s)esτds =∑k
res[X(s)esτ , pk]
Betrachten wir nun das Bogenstuck. Aufgrund des Wegdeformationssatzes7
7In einer holomorphen Umgebung ist der Weg verformbar, ohne etwas am Ergebnis zuandern.
16

Michael Robin 3 LAPLACETRANSFORMATION
durfen wir den Bogen als Halbkreis angeben. Somit folgt mittels Parametrisie-rung s− σ = R · ejφ:
s = σ +R · ejφ
ds = jR · ejφdφ
Wie in der Abbildung angegeben, integrieren wir von π/2 nach 3π/2. Also:
1
2πj
∫Hn
X(s)esτds =1
2πj
∫ 3π2
π2
X(σ +R · ejφ)e(σ+R·ejφ)·τ jR · ejφdφ
=1
2π
∫ 3π2
π2
X(σ +R · ejφ)eτσeτR·ejφ
R · ejφdφ
Mit Hilfe des Satzes von Euler, lasst sich die Exponentialfunktion im Expo-nenten umschreiben:
=1
2π
∫ 3π2
π2
X(σ +R · ejφ)eτσeτR·cos(φ)eτR·j sin(φ)R · ejφdφ
Nun wollen wir den ganzen Bereich abdecken und lassen somit den Radiusgegen Unendlich gehen. Dazu mussen wir uns klar machen, dass das X(s) einerationale Funktion ist, der Kosinus, wie in der Abbildung angedeutet, von π/2nach 3π/2 nur negative Werte annimmt und wir weiterhin ein τ > 0 vorausset-zen. Dies hat nun betragsmaßig folgende Bedeutung:
limR→∞
1
2π
∫ 3π2
π2
X(σ +R · ejφ)︸ ︷︷ ︸Rn
eτσ eτR·cos(φ)︸ ︷︷ ︸e−R
eτR·j sin(φ)︸ ︷︷ ︸1
R · ejφdφ
= limR→∞
Rn · e−R ·R = 0
Wenn wir also den Radius gegen unendlich gehen lassen, so verschwindet derentsprechende Integralanteil. Jedoch bleibt das Geradenstuck ubrig:
1
2πj
∫ σ+j∞
σ−j∞X(s)esτds =
∑k
res[X(s)esτ , pk]
Wenn wir das Ergebnis nun mit dem Umkehrintegral vergleichen,
1
2πj
∫ σ+j∞
σ−j∞X(s)esτds = x(τ)
so folgt unmittelbar, dass die Funktion im Zeitbereich sich als die Summeder Residuen der Pole darstellen lasst:∑
k
res[X(s)esτ , pk] = x(τ)
17

Michael Robin 3 LAPLACETRANSFORMATION
3.7 Faltungssatz
x1(τ) ∗ x2(τ) −• X1(s)X2(s)
Beweis:Da wir bei der Laplacetransformation vorausgesetzt haben, dass unsere Funk-
tionen rechtsseitig sind, gilt hier auch fur die Faltung, dass die untere Grenzebei 0− beginnen muss.
=
∫ ∞0−
Faltung︷ ︸︸ ︷∫ ∞0−
x1(τ ′)x2(τ − τ ′)dτ ′ e−sτdτ︸ ︷︷ ︸LaplaceDefinitionsintegral
Mittels Variablentransformation τ − τ ′ = τ ′′ und Umsortieren der Termelasst sich die Identitat wie folgt nachweisen:
=
∫ ∞0−
∫ ∞0−
x1(τ ′)x(τ′′)dτ ′e−s(τ
′′+τ ′)dτ ′′ =
∫ ∞0−
∫ ∞0−
x1(τ ′)e−sτ′x2(τ ′′)e−sτ
′′dτ ′dτ ′′
=
∫ ∞0−
x1(τ ′)e−sτ′dτ ′∫ ∞
0−x2(τ ′′)e−sτ
′′dτ ′′
= X1(s)X2(s)
Setzt man speziell X1(s) als den Laplacetransformierten Eingang eines Sys-tems, und X2(s) = G(s) als Ubertragungsfunktion an, dann erhalt man denAusgang Y (s) durch einfache Multiplikation, muss ihn jedoch wieder in denZeitbereich zu einem y(τ) zurucktransformieren. Man erspart sich die Faltungdes Eingangssignals mit der Stoßantwort.
3.8 Anfangswertsatz
x(0) = lims→∞
sX(s)
Beweis:Unter Zuhilfenahme der Zeitdifferentiationskorrespondenz
sX(s) −• x(0) +
∫ ∞0
x′(τ)e−sτdτ
ist hiermit unmittelbar ersichtlich, dass das Integral verschwindet, wenn mandas s gegen Unendlich gehen lasst:
lims→∞
sX(s) = x(0) + lims→∞
∫ ∞0
x′(τ)e−sτdτ︸ ︷︷ ︸=0
18

Michael Robin 3 LAPLACETRANSFORMATION
3.9 Endwertsatz
x(∞) = lims→0
sX(s)
Beweis:Wieder nehmen wir die Zeitdifferentiationskorrespondenz her, formulieren
sie jedoch etwas um.
sX(s) −• x(0−) +
∫ ∞0−
x′(τ)e−sτdτ
Wegen
x(∞)− x(0−) =
∫ ∞0−
x′dτ ⇒ x(0−) = x(∞)−∫ ∞
0−x′dτ
konnen wir x(0−) in die Korrespondenz einsetzen:
sX(s) −• x(∞)−∫ ∞
0−x′dτ +
∫ ∞0−
x′(τ)e−sτdτ
Lassen wir hier nun s gegen 0 gehen, somit wird die e-Funktion zu 1 und dieIntegrale heben sich auf.
lims→0
sX(s) = x(∞)−∫ ∞
0−x′dτ + lim
s→0
∫ ∞0−
x′(τ)e−sτdτ︸ ︷︷ ︸=0
19

Michael Robin 4 Z-TRANSFORMATION
4 Z-Transformation
4.1 Herleitung
Die Z-Transformation ist keine Integraltransformation. Sie wird in mancher Li-teratur als diskrete Laplacetransformation bezeichnet8. Ihre Starke liegt in derBehandlung zeitdiskreter Signale. Ein kontinuierliches Signal wird abgetastet.Das bedeutet, dass zu einem gewissen Zeitpunkt der Wert festgehalten wird.Diese Abtastung wird normalerweise aquidistant9 und periodisch fortgesetzt.Das bedeutet dann, dass wir einen Wertevorrat mit (x/y) = (kT/fk) erhalten.Die Information, welchen Wert das Signal zwischen den Abtastzeitpunkten hat,geht somit verloren. In der Praxis wird der Wert festgehalten durch ein soge-nanntes Sample/Hold-Glied10. Das bedeutet fur uns nun, dass das Signal durcheine Treppenfunktion angenahert wird.
Abbildung 5: Diskretisierung einer Funktion
Die Treppenfunktion lasst sich somit als Superposition von gewichteten, zeit-verschobenen Heavisidesprunge zusammenbauen. Eine einzelne Treppe lasst sichalso durch das Aufschalten eines Heavisidesprunges, und durch das Abschaltendes selben Heavisidesprunges um T verschoben erklaren:
fkε(τ − kT )− fkε(τ − (k + 1)T )
Reihen wir nun all diese Treppen aneinander, so ergibt sich der Treppenver-lauf als Summe wie folgt:
fD(τ) =
∞∑k=0
fk[ε(τ − kT )− ε(τ − (k + 1)T )]
8Vgl [5]9In gleichen Abstanden
10Abtasttheorem nach Shannon.
20

Michael Robin 4 Z-TRANSFORMATION
Wenden wir nun auf fD eine Laplacetransformation an, so benotigen wireinerseits die Transformation des Heaviside-Sprunges, und andererseits die Zeit-verschiebungskorrespondenz.
ε(τ) −• 1
s, x(τ − τ0) −• e−sτ0X(s)
Aufgrund der Linearitat folgt nun:
fD(τ) −• FD(s) =
∞∑k=0
fk
[1
se−skT − 1
se−s(k+1)T
]=
1
s(1− e−sT )
∞∑k=0
fke−skT
Der Vorfaktor besteht aus einem positiven, mit 1 gewichteten Heavisidesprung,und einem negativen, mit 1 gewichteten, um T verschobenen Heavisidesprung.Das entsprich dem Sample/Hold-Glied! Wenn wir nun die Summe naher be-trachten, besteht diese lediglich aus mit fk gewichteten, um kT verschobenenDirac-Stoßen!
Betrachten wir nun die Abtastung getrennt vom Sample/Hold-Glied undformen das wie folgt um11:
∞∑k=0
fk(esT )−k
dann erhalten wir durch Einfuhrung der Variable z = esT die Z-Transformation.
Fz(z) =
∞∑k=0
fkz−k
4.2 Existenz
Die Z-Transformation ist also eine Laurent-Reihe. Analog zur Laplacetransfor-mation, muss nicht jede Z-Transformation konvergieren. Damit mussen wir dieKonvergenz uberprufen um die Existenz zu zeigen.
Wir fordern also, dass es eine Konstante 0 < M <∞ gibt, so dass |f(τ)| ≤Meaτ gilt. Im Diskreten lautet die Bedingung somit: |fk| ≤MeakT .
Es ergibt sich fur |z| > eaT die absolute Konvergenz von
∞∑k=0
|fkz−k|
Beweis:Mittels einfacher Umformung erhalten wir folgendes:
=
∞∑k=0
|fk||z|−k ≤∞∑k=0
|MeakT ||z|−k = M
∞∑k=0
|eakT ||zk|
= M
∞∑k=0
(eaT
|z|
)k︸ ︷︷ ︸
qk
11Die Abtastfunktion ist nicht zeitinvariant!
21

Michael Robin 4 Z-TRANSFORMATION
Wir erhalten also eine geometrische Reihe. Diese konvergiert wenn q < 1erfullt ist. Das bedeutet also:
q < 1⇒ eaT
|z|< 1⇒ |z| > eaT
Konvergenz ist somit gegeben außerhalb eines Kreises mit Radius eaT .
Abbildung 6: Konvergenz der Z-Transformation
22

Michael Robin 4 Z-TRANSFORMATION
4.3 Verschiebungsregel
Die Verschiebungsregel der Z-Transformation lautet:
fk−m −• z−mFz(z)
Beweis:Fur den Beweis ist folgende Skizze hilfreich:
Abbildung 7: Verschiebungsregel der Z-Transformation
In der Grafik wird ein Signal f(t) um 2T verschoben. Wir sehen also unmit-telbar bei einer Verschiebung m = 2T , dass der Wert bei k = 2 zum neuen f0
wird, der Wert bei k = 3 zum neuen f1 wird und so weiter. Es wird also aus derFolge f0, f1, f2, f3, . . . die verschobene Folge f−2, f−1, f0, f1, . . . . Somit gilt imallgemeinen Falle:
f(t−mT ) −• fk−mWenn wir nun also eine verschobene Funktion Z-transformieren, folgt:
∞∑k=0
f(t−mT )z−k =
∞∑k=0
fk−mz−k
Setzen wir nun k −m = i, also k = i+m folgt:
∞∑i=−m
fiz−(i+m) = z−m
∞∑i=−m
fiz−i = z−m
−1∑i=−m
fiz−i + z−m
∞∑i=0
fiz−i
Bei rechtsseitigen Signalen verschwindet die erste Summe identisch, womitdie folgende Korrespondenz aufscheint:
f(t−mT ) −• z−m∞∑i=0
fiz−i = z−mFz(z)
23

Michael Robin 4 Z-TRANSFORMATION
Die gebrauchlichsten Verschiebungen ergeben sich fur m = ±1,±2:
fk−1 −• z−1Fz(z) + f−1
fk−2 −• z−2Fz(z) + z−1f−1 + f−2
fk+1 −• zFz(z)− zf0
fk+2 −• z2Fz(z)− zf1 − z2f0
4.4 Differenzengleichungen losen
Wir interessieren uns nun fur das Losen von Gleichungen der Art:
yk + a1yk−1 + · · ·+ anyk−n = b0uk + b1uk−1 + · · ·+ bmuk−m
Wenn wir die Z-Transformation mit der Verschieberegel anwenden, verein-facht sich die Gleichung. Dies sei anhand eines Beispieles gezeigt:
yk+a1yk−1 = b0uk+b1uk−1 −• Yz(z)+a1z−1Yz(z)+a1y−1 = b0Uz(z)+b1z
−1Uz(z)+b1u−1
Wir erhalten also eine algebraische Gleichung fur Yz(z):
Yz(z) =b0 + b1z
−1
1 + a1z−1Uz(z) +
b11 + a1z−1
u−1 −a1
1 + a1z−1y−1
Hier ist unmittelbar die Analogie zum Losen von Differentialgleichungen imLaplacebereich erkennbar! Haben wir ein System ohne Vorgeschichte12, so bleibtlediglich der erste Term uber, welcher sich als Gz(z)Uz(z) anschreiben lasst,wobei Gz(z) die Ubertragungsfunktion in z ist. Spinnen wir das Beispiel allge-meiner mit mit der Ordnung des Eingangs m und der Ordnung des Ausgangsn, so erhalten wir:
Yz(z) = Gz(z)Uz(z) +
m∑i=1
(Kizu−i)−n∑j=1
(Ljzy−j)
mit rationalen Funktionen Gz(z),Kiz, Ljz.
12also keine inneren Speicher.
24

Michael Robin 4 Z-TRANSFORMATION
4.5 Rucktransformation
Sie wird benotigt, um ein Signal im diskreten Zeitbereich zu erhalten. Mittelsdes Residuensatzes erhalten wir die Werte wie folgt:
Ausgehend von der Definitionsumme der Z-Transformation
Fz(z) =
∞∑k=0
fkz−k
erhalten wir das i-te Element uber folgende Formel13:
fi =1
2πj
∫K
Fz(z)zi−1dz
Beweis:Multiplizieren wir nun auf beiden Seiten der Z-Transformation mit zi−1 so
erhalten wir folgendes:
Fz(z)zi−1 =
∞∑k=0
fkz−k+i−1
= f0zi−1 + f1z
i−2 + f2zi−3 + · · ·+ fi−1z
0 + fiz−1 + fi+1z
−2 + . . .
Integrieren wir nun beide Seiten, so wird auf der rechten Seite komponen-tenweise integriert:∫
K
Fz(z)zi−1dz =
∫K
f0zi−1dz + · · ·+
∫K
fi(z)z−1dz + . . .
= fi2πj
Womit der Beweis gezeigt wurde.Ein Vergleich mit der Herleitung des Residuensatzes14 lasst sofort erkennen,
dass alle Integrale, bis auf das i-te, Null werden. Das erklart auch die zunachsteigenartige Multiplikation mit zi−1. Beim Residuensatz erhalten wir das −1-teElement, welches bei der rechtsseitigen Z-Transformation nicht existiert. Somitbedeutet die Multiplikation lediglich eine Verschiebung.
13Es wird uber einen Kreis K mit Mittelpunkt 0 integriert14Siehe 2.2
25

Michael Robin 4 Z-TRANSFORMATION
4.6 Faltungssumme
Ein Pendant zur Faltungskorrespondenz x1(τ) ∗ x2(τ) −• X1(s)X2(s) der La-placetransformation gibt es auch fur die Faltung im diskreten Zeitbereich.
k∑i=0
(gk−ifi) −• Fz(z)Gz(z)
Beweis:Es wird in die Z-Transformation eingesetzt und multipliziert:
Fz(z)Gz(z) =
∞∑i=0
(fiz−i)
∞∑j=0
(gjz−j) =
∞∑i,j=0
figjz−(i+j)
Setzen wir nun k = i+ j, beziehungsweise i = k − j, so folgt folgendes:
=
∞∑k=−j
∞∑j=0
fk−jgj
z−k
Einerseits haben wir die Rechtsseitigkeit des Signals, das bedeutet, dass eskeinen Funktionswert mit g−j gibt, wodurch wir die untere Grenze von k auf 0setzen durfen. Andererseits haben wir bei der zweiten Summe nur bis k zu sum-mieren, denn k+1 fuhrt zu einen fk−(k+1) = f−1 welches auch bei rechtsseitigenSignalen nicht existiert:
=
∞∑k=0
k∑j=0
fk−jgj
z−k
Ein Vergleich mit dem Faltungssatz der Laplacetransformation
X1(s)X2(s) = Lx1(τ) ∗ x2(τ)
Fz(z)Gz(z) =
∞∑k=0
k∑j=0
fk−jgj
z−k = Z
k∑j=0
fk−jgj
lasst somit den Faltungssatz im Zeitdiskreten erkennen. Es wird in der Lite-
ratur dann auch
fk ∗ gk −• Fz(z)Gz(z)
geschrieben und man meint hiermit die Faltungssumme.Es sei hier noch darauf hingewiesen, dass wenn man Fz(z) = Uz(z), also den
Eingang setzt, sowie Gz(z) die Ubertragungsfunktion annimmt, sich genausowie im Laplacebereich, der Ausgang Yz(z) durch Faltung ergibt.
26

Michael Robin 4 Z-TRANSFORMATION
4.7 Anfangswertsatz
Der Anfangswertsatz der Z-Transformation lautet:
limz→∞
Fz(z) = f0
Er liefert also den Funktionswert zum Zeitpunkt t = 0, jedoch mit demUnterschied zur Laplacetransformation, dass wir hier im Diskreten operieren,also sozusagen den nullten Funktionswert der Summe erhalten.
Der Beweis ist leicht nachvollziehbar:
Fz(z) =
∞∑k=0
fkz−k = f0 +
f1
z+f2
z2+f3
z3+ . . .
Somit ist unmittelbar ersichtlich, das beim Bilden des Grenzwertes fur z →∞ nur der Koeffizient von z0 uberbleibt.
4.8 Endwertsatz
Der Endwertsatz der Z-Transformation lautet:
limz→1
(z − 1)Fz(z) = limk→∞
fk
falls limk→∞ fk endlich ist.Beweis:Zunachst stellen wir fk als Teleskopreihe dar:
fk = f−1 +
k∑i=0
(fi − fi−1)
und betrachten den Limes:
limk→∞
fk = f−1 +
∞∑i=0
(fi − fi−1)
Andererseits gilt:
∞∑i=0
(fi − fi−1)z−i =
∞∑i=0
fiz−i −
∞∑i=0
fi−1z−i
= Fz(z)− (f−1 + f0z−1 + f1z
−2 + . . . )
= Fz(z)− f−1 − z−1(f0 + f1z−1 + f2z
−2 + . . . )
= Fz(z)− f−1 − z−1∞∑i=0
fiz−i
= Fz(z)− f−1 − z−1Fz(z)
= (1− z−1)Fz(z)− f−1
lassen wir hier nun den Limes z → 1 gehen, so folgt:
27

Michael Robin 4 Z-TRANSFORMATION
limz→1
∞∑i=0
(fi − fi−1)z−i =
∞∑i=0
(fi − fi−1) = limz→1
(1− z−1)Fz(z)− f−1
Wenn wir jetzt die beiden Teilergebnise vergleichen
∞∑i=0
(fi − fi−1) = limk→∞
fk − f−1
∞∑i=0
(fi − fi−1) = limz→1
(1− z−1)Fz(z)− f−1
konnen wir sie also gleichsetzen und es folgt:
limk→∞
fk − f−1 = limz→1
(1− z−1)Fz(z)− f−1
limk→∞
fk = limz→1
(z − 1
z
)Fz(z)
limk→∞
fk = limz→1
(z − 1)Fz(z)
Auch hier gilt wieder, dass der Grenzwert existieren muss, sonst darf manden Endwertsatz nicht anwenden.
4.9 Eindeutigkeit
Es ist leicht einsehbar, dass ein diskret abgetastetes zeitkontinuierliches Signalnicht mehr eundeutig bestimmbar ist.
Abbildung 8: Fehlen der Eindeutigkeit der Rucktransformation
Wie bereits erwahnt, ist das Signal nur fur die Abtastwerte eindeutig be-stimmt. Dazwischen kann das Signal irgendwie liegen. In der Praxis erhalt mandas zeitkontinuierliche Signal durch Interpolation15.
Jedoch ist die Eindeutigkeit auch fur die Hintransformation nicht immergegeben. Sehen wir uns dafur die Herleitung eines linksseitigen Signals an. DieSumme geht von −∞ nach −1, damit man das gesamte Signal als Addition vomlinksseitigen und rechtsseitigen Signal erhalt.
15Bei elektrischen Signalen erfolgt dies uber Tiefpassfilterung (auch Glattung genannt).
28

Michael Robin 4 Z-TRANSFORMATION
−1∑−∞
fkz−k =
∞∑1
f−kzk = −f0 +
∞∑0
f−kzk
Wir betrachten auch hier wieder die Konvergenz:
−f0 +
∞∑0
|f−kzk| = −f0 +
∞∑0
|f−k||z|k = −f0 +
∞∑0
|Me−akT ||z|k
= −f0 +M
∞∑0
(|z|eaT
)k︸ ︷︷ ︸
qk
Wir erhalten auch fur das linksseitige Signal eine geometrische Reihe, welchefur |q| < 1 konvergent ist. Hieraus folgt somit |z| < eaT . Woraus wir schluss-folgern konnen, dass das llinksseitige Signal innerhalb eines Kreises mit RadiuseaT konvergiert.
Betrachten wir also nun ein einfaches Beispiel eines rechtsseitigen Signalsmit konstantem fk = 1 und ein linksseitiges Signal mit konstantem fk = −1.
a) fk = 1 rechtsseitig
∞∑0
z−k =
∞∑0
(1
z
)k=
1
1− 1z
=z
z − 1
b) fk = −1 linksseitig
−1∑−∞−z−k =
∞∑1
−zk = z0 −∞∑0
zk = 1− 1
1− z=
1− z − 1
1− z=−z
1− z
=z
z − 1
Wir erhalten also fur beide Falle die selbe Z-Transformation. Jedoch ganzverschiedene Konvergenzbereiche. Zur eindeutigen Bestimmung benotigt manalso nicht nur die Z-Transformation alleine, sondern noch Information uberrechtsseitig oder linksseitig.
29

Michael Robin 5 WEITERE INTEGRALTRANSFORMATIONEN
5 Weitere Integraltransformationen
5.1 Allgemein
Eine Integraltransformation beschreibt eine lineare Operation der Form
(Tf)(x) =
∫Ω
K(t, x)f(t)dt
Dabei nennt man K(t, x) den Integralkern und Ω den Integrationsbereich.
Beispiele:Die einseitige Laplacetransformation hat als Kern e−sτ und als Integrationsbe-reich R+
0 .
Die zweiseitige Laplacetransformation hat als Kern e−sτ und als Integrations-bereich R.
Die Fouriertransformation hat als Kern e−jντ und als Integrationsbereich Rn.
Die Mellin-Transformation hat als Kern tu−1 und als Integrationsbereich R+0 .
Die Hilbert-Transformation hat als (Faltungs)Kern 1π
1ν−ν′ und als Integrati-
onsbereich R.
Damit auch eine Rucktransformation existiert, muss man sicherstellen, dass eseinen inverser Kern K−1 gibt.
30

Michael Robin 5 WEITERE INTEGRALTRANSFORMATIONEN
5.2 Zweiseitige Laplacetransformation
Bei der zweiseitigen Laplacetransformation liegt die untere Integration im In-tervall (−infty, 0−). Das Integral lasst sich dann wie folgt aufspalten:
F (s) =
∫ ∞−∞
f(τ)e−sτdτ
=
∫ 0
−∞f(τ)e−sτdτ +
∫ ∞0
f(τ)e−sτdτ
Wenn wir uns an die Existenzforderung mit der Konvergenzabszisse erin-nern, ist leicht einsichtig, dass wir nun einen Konvergenzbereich in Form einesStreifens benotigen:
Abbildung 9: Konvergenzbereich der zweiseitigen Laplacetransformation
Beispiel: f(τ) = e−a|τ |.
F (s) =
∫ 0
−∞eaτe−sτdτ +
∫ ∞0
e−aτe−sτdτ =
∫ 0
−∞e(a−s)τdτ +
∫ ∞0
e−(a+s)τdτ
=
[1
a− se(a−s)τ
]0
−∞+
[1
−(a+ s)e−(a+s)τ
]∞0
=1
a− s− 0 + 0− 1
−(a+ s)
=1
a− s+
1
a+ s
Ein Blick auf die Konvergenz des ersten Integrals liefert, dass der Realteil vons kleiner als a sein muss: Re(s) < a. Beim zweiten Integral hingegen verlangenwir, dass der Realteil großer als −a sein soll: Re(s) > −a.
Damit folgt also, dass die zweiseitige Laplacetransformation nur fur −a <Re(s) < a konvergiert.
Fur die Signaltheorie entfallen nun zwei Vorteile. Einerseits die einfache Kon-vergenzbedingung, andererseits erhalten wir nicht mehr die Anfangszustandebeim Differentialgleichungen losen. Deshalb ist die zweiseitige Laplacetransfor-mation in der Signalverarbeitung weniger gebrauchlich. Anwendung findet siejedoch in der Wahrscheinlichkeitstheorie.
31

Michael Robin 5 WEITERE INTEGRALTRANSFORMATIONEN
5.3 Zweiseitige Z-Transformation
Analog zur zweiseitigen Laplacetransformation gibt es auch die zweiseitige Z-Transformation. Es stellt sich auch hier wieder die Frage der Konvergenz wieam Beispiel fk = a|k| bei positivem a gezeigt werden soll:
∞∑−∞
a|k|z−k =
−1∑−∞
a−kz−k +
∞∑0
akz−k
= −1 +
∞∑0
(az)k +
∞∑0
(a
z)k
Die erste Summe konvergiert als geometrische Reihe fur |z| < 1a . Die Zweite
Summe hingegen fur |z| > a. Damit nun die zweiseitige Z-Transformation kon-vergiert, fordern wir a < z < 1
a . Dies ist zum Beispiel mit a = 1/2 erfullbar.Wir erhalten hier also Konvergenz auf einem Kreisring:
Abbildung 10: Konvergenzbereich der zweiseitigen Z-Transformation
32

Michael Robin 5 WEITERE INTEGRALTRANSFORMATIONEN
5.4 Fouriertransformation
Wir konnen die Fouriertransformation als Spezialfall der zweiseitigen Laplace-transformation auffassen. Werten wir die Laplacetransformation auf der ima-ginaren Achse aus, so folgt σ = 0 und s = jν.
F (jν) =
∫ ∞−∞
f(τ)e−jντdτ
f(τ) =1
2πj
∫ j∞
−j∞F (jν)ejντd(jν) =
1
2π
∫ ∞−∞
F (jν)ejντdν
Wir haben hier eine schwererer zu uberprufende Konvergenz als bei der ein-seitigen Laplacetransformation. Der Vorteil ist jedoch, dass harmonische Funk-tionen physikalisch interpretiert werden konnen. Der komplexe Frequenzgangerweist sich als Fouriertransformierte der Stoßantwort.
5.5 Hilberttransformation
Bevor wir zur Hilberttransformation kommen, benotigen wir den Faltungssatzder Fouriertransformation, sowie das Spektrum des Heaviside-Sprunges.
Der Faltungssatz der Fouriertransformation lautet wie folgt:
x1(τ)x2(τ) −• 1
2πX1(jν) ∗X2(jν)
Beweis:
1
2π
1
2π
Faltung︷ ︸︸ ︷∫ ∞−∞
X1(jν′)X2(jν − jν′)dν′ ejντdν︸ ︷︷ ︸Rucktransformation
=1
2π
1
2π
∫ ∞−∞
∫ ∞−∞
X1(jν′)X2(jν′′)dν′ej(ν′+ν′′)τdν′′
=1
2π
∫ ∞−∞
X1(jν′)ejν′τdν′
1
2π
∫ ∞−∞
X2(jν′′)ejν′′τdν′′
= x1(τ)x2(τ)
Das Spektrum des Heaviside-Sprunges lautet:
ε(τ) −• 1
jν+ πδ(ν)
Wenn wir nun ein beliebiges Signal rechtsseitig machen, so haben wir gese-hen, dass eine Multiplikation mit dem Heaviside-Sprung notwendig ist, alsofr(τ) = f(τ)ε(τ). Wenn wir dieses Signal nun Fouriertransformieren, ergibtsich nach Anwendung des Faltungssatzes das Folgende:
33

Michael Robin 5 WEITERE INTEGRALTRANSFORMATIONEN
f(τ) = f(τ)ε(τ) −• F (jν) =1
2πF (jν) ∗
[1
jν+ πδ(ν)
]F (jν) =
1
2π
∫ ∞−∞
F (ν′)1
j(ν − ν′)dν′ +
1
2F (jν)
1
2F (jν) =
1
2π
∫ ∞−∞
F (ν′)
j(ν − ν′)dν′
F (jν) =1
jπ
∫ ∞−∞
F (ν′)
(ν − ν′)dν′
Angenommen, das Spektrum F (jν) bestehe nun aus einem Realteil R(jν)und einem Imaginarteil I(jν). Dann lasst sich das Spektrum in der Form F (jν) =R(jν) + jI(jν) schreiben. Wenn wir dies nun in das soeben errungene Ergebniseinsetzen, folgt:
R(jν)+jI(jν) =1
jπ
∫ ∞−∞
R(jν′) + jI(jν′))
(ν − ν′)dν′ =
1
π
∫ ∞−∞
I(ν′)
(ν − ν′)dν′− j
π
∫ ∞−∞
R(ν′)
(ν − ν′)dν′
Vergleich von Real- und Imaginarteil ergibt:
R(jν) =1
π
∫ ∞−∞
I(jν′)
ν − ν′dν′, I(jν) = − 1
π
∫ ∞−∞
R(jν′)
ν − ν′dν′
Das bedeutet, dass der Realteil des Spektrums eines kausalen Zeitsignalseindeutig durch den Imaginarteil bestimmt ist und umgekehrt! Nun stellt sichdie Frage, ob man bei Kenntnis des Realteils, beziehungsweise des Imaginarteils,das kausale Signal im Zeitbereich wieder beschaffen kann. Hierzu teilt man daskausale Zeitsignal in einen geraden und ungeraden Anteil:
Abbildung 11: Aufspalten einer Funktion in ihren geraden und ungeraden Anteil
Wir erhalten fur alle τ die Funktion aus der Summe vom geraden und unge-raden Anteil: f(τ) = fg(τ) + fu(τ). Das bedeutet, dass fur den interessierendenBereich τ > 0, sich f als f(τ) = 2fg(τ) = 2fu(τ) darstellen lasst!
Jetzt mussen wir noch die Spektren untersuchen, und zwar folgende Korre-spondenzen:
1. Eine gerade Funktion liefert ein gerades Spektrum und umgekehrt.
f(τ) = f(−τ) −• F (jν) = F (−jν)
34

Michael Robin 5 WEITERE INTEGRALTRANSFORMATIONEN
2. Eine ungerade Funktion liefert ein ungerades Spektrum und umgekehrt.
f(τ) = −f(−τ) −• F (jν) = −F (−jν)
3. Eine rellwertige Funktion liefert einen geraden Realteil und ungeraden Ima-ginarteil des Spektrums.
f(τ) = f∗(τ) −• F (−jν) = F ∗(jν)
Dazu schauen wir uns an, wie sich f(−τ) unter Zuhilfenahme des Definitions-integrals transformiert:
F (jν) =
∫ ∞−∞
f(τ)e−jντdτ
nun ersetzen wir τ durch −τ :
F (jν) =
∫ ∞−∞
f(−τ)ejντdτ
und um wieder auf die ursprungliche Form zu kommen, ersetzen wir nun νdurch −ν:
F (−jν) =
∫ ∞−∞
f(−τ)e−jντdτ
Somit wurde die Korrespondenz
f(−τ) −• F (−jν)
gezeigt.Nun wenden wir die neu errungene Information auf gerade und ungerade
Funktionen an:
fg(τ) =1
2f(τ) +
1
2f(−τ) −• 1
2F (jν) +
1
2F (−jν) = Fg(jν)
fu(τ) =1
2f(τ)− 1
2f(−τ) −• 1
2F (jν)− 1
2F (−jν) = Fu(jν)
wodurch gezeigt wurde, dass eine gerade Funktion ein gerades Spektrum,und eine ungerade funktion ein ungerades Spektrum liefert.
fg(τ) −• Fg(jν), fu(τ) −• Fu(jν)
35

Michael Robin 5 WEITERE INTEGRALTRANSFORMATIONEN
Gehen wir noch einen Schritt weiter und spalten das Integral nochmals auf:
1
2π
∫ 0
−∞Fg(jν)ejντdν +
1
2π
∫ ∞0
Fg(jν)ejντdν
=1
2π
∫ ∞0
Fg(−jν)e−jντdν +1
2π
∫ ∞0
Fg(jν)ejντdν
Da nun Fg(jν) = Fg(−jν) gilt:
=1
2π
∫ ∞0
Fg(jν)(e−jντ + ejντ )dν
=1
π
∫ ∞0
Fg(jν) cos(ντ)dν
Analog gilt fur ungerade Spektren:
1
2π
∫ 0
−∞Fu(jν)ejντdν +
1
2π
∫ ∞0
Fu(jν)ejντdν
=1
2π
∫ ∞0
Fu(−jν)e−jντdν +1
2π
∫ ∞0
Fu(jν)ejντdν
Da nun −Fu(jν) = Fu(−jν) ergibt sich:
=1
2π
∫ ∞0
Fu(jν)(ejντ − e−jντ )dν
=j
π
∫ ∞0
Fu(jν) sin(ντ)dν
Sehen wir uns nun die konjugiert komplexe Funktion an:
F (jν) =
∫ ∞−∞
f(τ)e−jντdτ
(F (jν))∗ =
(∫ ∞−∞
f(τ)e−jντdτ
)∗F ∗(jν) =
∫ ∞−∞
f∗(τ)ejντdτ
und mit ν → −ν
F ∗(−jν) =
∫ ∞−∞
f∗(τ)e−jντdτ
Dies liefert die Korrespodenz
f∗(τ) −• F ∗(−jν)
36
Michael Robin 5 WEITERE INTEGRALTRANSFORMATIONEN
Aus dieser Beziehung folgt nun, dass bei einem reellwertigen Zeitsignal derRealteil des Spektrums eine gerade, und der Imaginarteil des Spektrums eineungerade Funktion darstellt. Mit F (jν) = R(jν) + jI(jν) folgt:
f(τ) = f∗(τ) −• F (jν) = R(jν) + jI(jν) = F ∗(−jν) = R(−jν)− jI(−jν)
R(jν) = R(−jν), jI(jν) = −jI(−jν)
F (jν) = Fg(jν) + Fu(jν) = R(jν) + jI(jν)
Fassen wir nochmal zusammen:
f(τ) =1
2π
∫ ∞0
F (−jν)e−jντdν +1
2π
∫ ∞0
F (jν)ejντdν
da F (−jν) = F (jν) fur gerade Funktionen gilt:
f(τ) = 2fg(τ) =1
π
∫ ∞0
Fg(jν)(e−jντ + ejντ )dν =2
π
∫ ∞0
Fg(jν) cos(ντ)dν
da R(jν) = R(−jν)→ Fg(jν) = R(jν) fur reelle Funktionen gilt:
f(τ) =2
π
∫ ∞0
R(jν) cos(ντ)dν
beziehungsweise:
R(jν) = 2
∫ ∞0
fg(τ) cos(ντ)dτ
Analog naturlich alles nochmal fur den Imaginarteil:
da I(jν) = −I(−jν)→ Fu(jν) = jI(jν) fur reelle Funktionen gilt:
f(τ) = 2fu(τ) =2j
π
∫ ∞0
Fu(jν) sin(ντ)dν =2j
π
∫ ∞0
jI(jν) sin(ντ)dν
f(τ) = − 2
π
∫ ∞0
I(jν) sin(ντ)dν
beziehungsweise:
I(jν) = −2
∫ ∞0
fu(τ) sin(ντ)dτ
Um das nochmal zu betonen, diese Formeln gelten nur fur den kausalen Teil,also τ > 0.Die Hilbert-Transformation wird unter anderem in der Signalverarbeitung ein-gesetzt. Man kann zum Beispiel bei Modulationsverfahren den Imaginarteilempfangerseitig uber den Realteil des Signals ruckgewinnen.
37

Michael Robin LITERATUR
6 Literatur- und Abbildungsverzeichnis
Abbildungsverzeichnis
1 Variablentransformation an einem Kreis . . . . . . . . . . . . . . 32 Konvergenz der Laplacetransformation . . . . . . . . . . . . . . . 93 Konvergenz der Laplacetransformation mit τ → jτ . . . . . . . . 104 Residuensatz bei Laplacerucktransformation . . . . . . . . . . . . 165 Diskretisierung einer Funktion . . . . . . . . . . . . . . . . . . . . 206 Konvergenz der Z-Transformation . . . . . . . . . . . . . . . . . . 227 Verschiebungsregel der Z-Transformation . . . . . . . . . . . . . . 238 Fehlen der Eindeutigkeit der Rucktransformation . . . . . . . . . 289 Konvergenzbereich der zweiseitigen Laplacetransformation . . . . 3110 Konvergenzbereich der zweiseitigen Z-Transformation . . . . . . . 3211 Aufspalten einer Funktion in ihren geraden und ungeraden Anteil 34
Literatur
[1] S. Krause und A. Korner,VU Mathematik fur Elektrotechnik 1. Teil: Komplexe Analysis,2011
[2] A. Prechtl,VU Signale und Systeme 1,2011
[3] G. Doblinger,Zeitdiskrete Signale und Systeme,2010
[4] O. Follinger,Laplace-, Fourier- und Z-Transformation,2011
[5] A. Kugi,Automatisierung,2011
38