research article stabilization of driven pendulum with...
TRANSCRIPT

Hindawi Publishing CorporationJournal of Nonlinear DynamicsVolume 2013, Article ID 824701, 9 pageshttp://dx.doi.org/10.1155/2013/824701
Research ArticleStabilization of Driven Pendulum with Periodic Linear Forces
Babar Ahmad
COMSATS Institute of Information Technology, Islamabad 44000, Pakistan
Correspondence should be addressed to Babar Ahmad; [email protected]
Received 27 March 2013; Revised 18 August 2013; Accepted 23 August 2013
Academic Editor: Huai-Ning Wu
Copyright © 2013 Babar Ahmad.This is an open access article distributed under the Creative CommonsAttribution License, whichpermits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
UsingKapitzamethod of averaging for arbitrary periodic forces, the pendulumdriven by different forms of periodic piecewise linearforces is stabilized. These periodic piecewise linear forces are selected in the range [−1, 1] to establish an exact comparison withharmonic forces. In this contest, the rectangular force was found to be the best, but this force is more effective when it has a time-dependent structure. This time-dependent structure is found by defining a parametric control on some other periodic piecewiselinear forces.
1. Introduction
A pendulum with fixed suspension has only one stable point,while a pendulum whose suspension has fast oscillation canhavemore stable points (can oscillate). Such phenomenawerefirst studied by Stephenson in 1908 [1–3]. In 1951, Kapitzapresented this problem in a different way [4], so-calledKapitza pendulum. In 1960, Landau et al. studied the stabilityof such a system driven by harmonic force [5].Then, its rapidgrowing applications started such as trapping of particles bylaser [6–8], control of robotic devices [9, 10], effect on priceequilibrium [11], and control by lasers in cybernetics [12].Next in place of harmonic forceAhmad andBorisenok (2009)used periodic kicking forces, modifying Kapitza method forarbitrary periodic forces [13]. Also, Ahmad used symmetricforces and stabilized the system with comparatively lowfrequency of fast oscillation [14].
2. Kapitza Method for ArbitraryPeriodic Forces
A classical particle of mass 𝑚 is moving in time-independentpotential field 𝑈 and a fast oscillating control field. Forsimplicity, consider one-dimensional motion.Then, the forcedue to time-independent potential 𝑈(𝑥) is
𝑓1
(𝑥) = −𝑑𝑈
𝑑𝑥, (1)
and a periodic fast oscillating force with zeromean in Fourierseries is
𝑓2
(𝑥, 𝑡) =
∞
∑𝑘=1
[𝑎𝑘
(𝑥) cos (𝑘𝜔𝑡) + 𝑏𝑘
(𝑥) sin (𝑘𝜔𝑡)] . (2)
This fast oscillation has frequency 𝜔 ≡ 2𝜋/𝑇 ≫ 2𝜋/𝑇𝑈
≡ 𝜔0.
Here,𝜔0is the frequency ofmotion due to𝑓
1.Themean value
of a function is denoted by bar and is defined as
𝑓 =1
𝑇∫𝑇
0
𝑓 (𝑥, 𝑡) 𝑑𝑡. (3)
Also, the Fourier coefficient 𝑎0is
𝑎0
(𝑥) =2
𝑇∫𝑇
0
𝑓2
(𝑥, 𝑡) 𝑑𝑡. (4)
From (3) and (4), it follows that
𝑓 ≅ 𝑎0. (5)
In (2), 𝑎𝑘and 𝑏𝑘are the Fourier coefficients given as
𝑎𝑘
(𝑥) =2
𝑇∫𝑇
0
𝑓2
(𝑥, 𝑡) cos 𝑘𝜔𝑡 𝑑𝑡,
𝑏𝑘
(𝑥) =2
𝑇∫𝑇
0
𝑓2
(𝑥, 𝑡) sin 𝑘𝜔𝑡 𝑑𝑡.
(6)
2 Journal of Nonlinear Dynamics
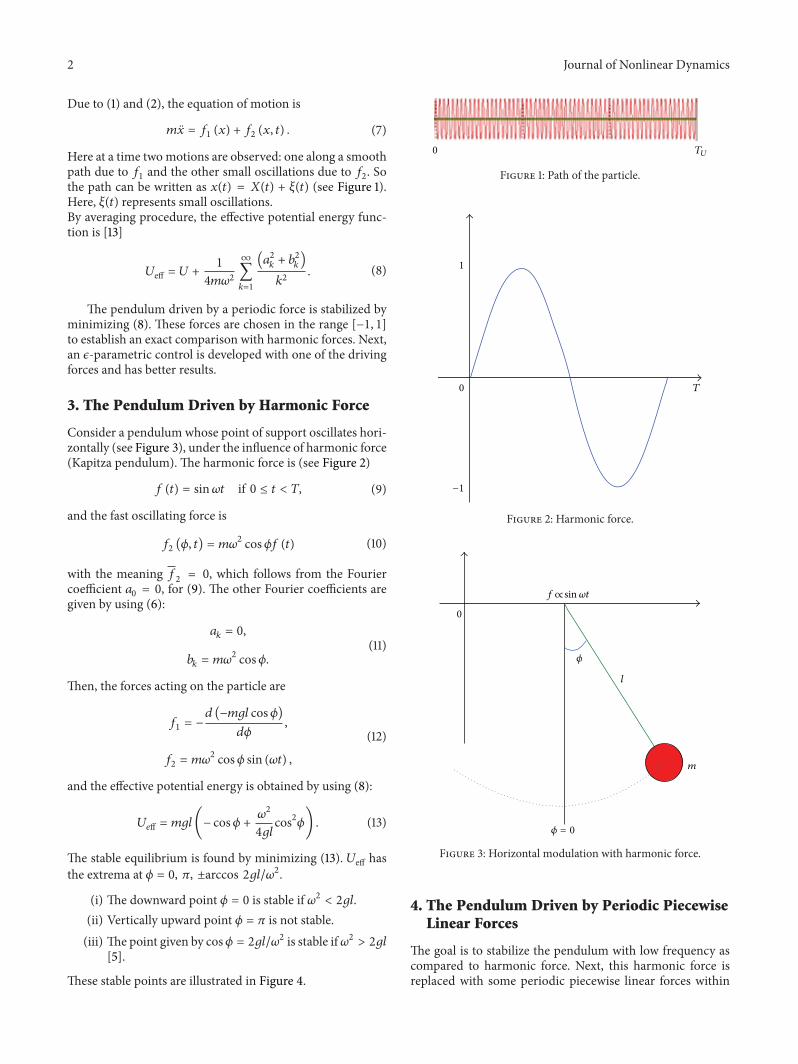
Due to (1) and (2), the equation of motion is
𝑚�̈� = 𝑓1
(𝑥) + 𝑓2
(𝑥, 𝑡) . (7)
Here at a time twomotions are observed: one along a smoothpath due to 𝑓
1and the other small oscillations due to 𝑓
2. So
the path can be written as 𝑥(𝑡) = 𝑋(𝑡) + 𝜉(𝑡) (see Figure 1).Here, 𝜉(𝑡) represents small oscillations.By averaging procedure, the effective potential energy func-tion is [13]
𝑈eff = 𝑈 +1
4𝑚𝜔2
∞
∑𝑘=1
(𝑎2
𝑘+ 𝑏2
𝑘)
𝑘2. (8)
The pendulum driven by a periodic force is stabilized byminimizing (8). These forces are chosen in the range [−1, 1]
to establish an exact comparison with harmonic forces. Next,an 𝜖-parametric control is developed with one of the drivingforces and has better results.
3. The Pendulum Driven by Harmonic Force
Consider a pendulum whose point of support oscillates hori-zontally (see Figure 3), under the influence of harmonic force(Kapitza pendulum). The harmonic force is (see Figure 2)
𝑓 (𝑡) = sin𝜔𝑡 if 0 ≤ 𝑡 < 𝑇, (9)
and the fast oscillating force is
𝑓2
(𝜙, 𝑡) = 𝑚𝜔2 cos𝜙𝑓 (𝑡) (10)
with the meaning 𝑓2
= 0, which follows from the Fouriercoefficient 𝑎
0= 0, for (9). The other Fourier coefficients are
given by using (6):
𝑎𝑘
= 0,
𝑏𝑘
= 𝑚𝜔2 cos𝜙.
(11)
Then, the forces acting on the particle are
𝑓1
= −𝑑 (−𝑚𝑔𝑙 cos𝜙)
𝑑𝜙,
𝑓2
= 𝑚𝜔2 cos𝜙 sin (𝜔𝑡) ,
(12)
and the effective potential energy is obtained by using (8):
𝑈𝑒ff = 𝑚𝑔𝑙 (− cos𝜙 +
𝜔2
4𝑔𝑙cos2𝜙) . (13)
The stable equilibrium is found by minimizing (13). 𝑈eff hasthe extrema at 𝜙 = 0, 𝜋, ±arccos 2𝑔𝑙/𝜔
2.
(i) The downward point 𝜙 = 0 is stable if 𝜔2
< 2𝑔𝑙.(ii) Vertically upward point 𝜙 = 𝜋 is not stable.(iii) The point given by cos𝜙 = 2𝑔𝑙/𝜔
2 is stable if𝜔2
> 2𝑔𝑙
[5].
These stable points are illustrated in Figure 4.
0 TU
Figure 1: Path of the particle.
−1
0
1
T
Figure 2: Harmonic force.
𝜙
𝜙 = 0
l
m
0
f∝sin 𝜔t
Figure 3: Horizontal modulation with harmonic force.
4. The Pendulum Driven by Periodic PiecewiseLinear Forces
The goal is to stabilize the pendulum with low frequency ascompared to harmonic force. Next, this harmonic force isreplaced with some periodic piecewise linear forces within

Journal of Nonlinear Dynamics 3
𝜙
𝜙 = 0
l
m
0
Figure 4: Stable points with horizontal oscillations.
the range of harmonic force. These periodic piecewise linearforces are 𝑇-periodical: 𝑅(𝑡 + 𝑇, 𝑛) ≡ 𝑅(𝑡, 𝑛). For horizontalmodulation, the force acting on the particle is
𝑓2
(𝜙, 𝑡) = 𝑚𝜔2 cos𝜙 ⋅ 𝑅 (𝑡, 𝑛) . (14)
4.1. Triangular Type Force. First of all introduce the triangulartype force (see Figure 5) given by
𝑅𝑠(𝑡) =
{{{{{{{{{
{{{{{{{{{
{
4
𝑇𝑡 if 0 ≤ 𝑡 <
𝑇
4,
4
𝑇(−𝑡 +
𝑇
2) if 𝑇
4≤ 𝑡 <
3𝑇
4,
4
𝑇(𝑡 − 𝑇) if 3𝑇
4≤ 𝑡 < 𝑇.
(15)
For (15), the Fourier coefficient 𝑎0
= 0 indicates 𝑅𝑠
= 0. TheFourier expansion of (14) is
𝑓2
(𝜙, 𝑡) = 𝑚𝜔2 cos𝜙
8
𝜋2
×
∞
∑𝑗=0
(−1)𝑗
(2𝑗 + 1)2sin(
2𝜋 (2𝑗 + 1) 𝑡
𝑇) .
(16)
With
𝑎𝑘
= 0,
𝑏𝑘
= 𝑚𝜔2 cos𝜙
8
𝜋2(−1)𝑗
(2𝑗 + 1)2,
(17)
the effective potential energy is
𝑈eff = 𝑈 + 𝑚𝜔2cos2𝜙 ⋅
1
4(
8
𝜋2)2 ∞
∑𝑗=0
1
(2𝑗 + 1)6
= 𝑈 +𝜋2
60𝑚𝜔2cos2𝜙
(18)
which has extrema at 𝜙 = 0, 𝜋, ±arccos 30𝑔𝑙/𝜔2𝜋2. Mini-
mization of 𝑈eff shows that
0 TT/4
−1
1
3T/4
Figure 5: Triangular type force.
(i) the downward point 𝜙 = 0 is stable if 𝜔2
< 3.0396𝑔𝑙,(ii) vertically upward point 𝜙 = 𝜋 is not stable,(iii) the point given by cos𝜙 = 3.0396𝑔𝑙/𝜔
2 is stable if𝜔2
> 3.0396𝑔𝑙.From (iii), it is observed that, at nontrivial position, theoscillator is stabilized with higher frequency as compared toharmonic force [13].
Hence, this force is less effective than sin- or cos-typeforce. So, this force is replaced by some other periodicpiecewise linear forces.
4.2. Hat Type Force. Now if sine function is traced by linearpulses (see Figure 6), defined by (19)
𝐿𝑐(𝑡) =
{{{{{{{{{{{{{{{{{{{{{
{{{{{{{{{{{{{{{{{{{{{
{
1
2if 0 ≤ 𝑡 <
1
6𝑇,
1 if 1
6𝑇 ≤ 𝑡 <
1
3𝑇,
1
2if 1
3𝑇 ≤ 𝑡 <
1
2𝑇,
−1
2if 1
2𝑇 ≤ 𝑡 <
2
3𝑇,
−1 if 2
3𝑇 ≤ 𝑡 <
5
6𝑇,
−1
2if 5
6𝑇 ≤ 𝑡 < 𝑇,
(19)
Next if the sine force is traced by a linear force forming a hat(see Figure 6), defined by (19). For horizontalmodulation, theoscillating force is
𝑓2
(𝜙, 𝑡) = 𝑚𝜔2 cos𝜙 ⋅ 𝐿
𝑐(𝑡) . (20)
Then, by Fourier expansion in place of (19),
𝑎𝑘
= 0
𝑏𝑘
= 𝑚𝜔2 cos𝜙
1
𝑘𝜋(1 − cos 𝑘𝜋 + 2 cos 𝑘
𝜋
3) .
(21)
Using the above coefficients, the oscillating force acting onthe particle is
𝑓2
(𝑡) = 𝑚𝜔2 cos𝜙
×
∞
∑𝑘=1
1
𝑘𝜋(1 − cos 𝑘𝜋 + 2 cos 𝑘
𝜋
3) sin 𝑘𝜔𝑡,
(22)

4 Journal of Nonlinear Dynamics
0
−1
1
1/2
−1/2
T/6 T/2 T5T/6
Figure 6: Hat type force.
and the effective potential energy is
𝑈eff = 𝑈 + 𝑚𝜔2cos2𝜙
⋅1
4𝜋2
∞
∑𝑘=1
1
𝑘2(1 − cos 𝑘𝜋 + 2 cos 𝑘
𝜋
3)2
𝑈eff = 𝑈 + 0.2302𝑚𝜔2𝜋2cos2𝜙
(23)
which has extrema at 𝜙 = 0, 𝜋, ±arccos 2.172𝑔𝑙/𝜔2. Here,
(i) the position 𝜙 = 0 is stable if 𝜔2
< 2.172𝑔𝑙,(ii) the inverse position 𝜙 = 𝜋 is not stable,(iii) the position 𝜙 = arccos 2.172𝑔𝑙/𝜔
2 is stable if 𝜔2
>
2.172𝑔𝑙.
Again a less effective result is obtained. So this periodicpiecewise linear force is replaced by another one.
4.3. Trapezium Type Force. If the sine force is traced by alinear shape forming a trapezium (see Figure 7), given by (24)
𝑇𝑚
(𝑡) =
{{{{{{{{{{{{{{{{{
{{{{{{{{{{{{{{{{{
{
8𝑡
𝑇if 0 ≤ 𝑡 <
𝑇
8,
1 if 𝑇
8≤ 𝑡 <
3𝑇
8,
8
𝑇(
𝑇
2− 𝑡) if 3𝑇
8≤ 𝑡 <
5𝑇
8,
−1 if 5𝑇
8≤ 𝑡 <
7𝑇
8,
8 (𝑡 − 𝑇)
𝑇if 7𝑇
8≤ 𝑡 < 𝑇,
(24)
with 𝑇𝑚
= 0. For horizontal modulation, the force acting onthe particle is
𝑓2
(𝜙, 𝑡) = 𝑚𝜔2 cos𝜙 ⋅ 𝑇
𝑀(𝑡, 𝑛) . (25)
Then, by Fourier expansion in the place of (24),
𝑎𝑘
= 0,
𝑏𝑘
= 𝑚𝜔2 cos𝜙
16
𝜋21
𝑘2sin 𝑘
𝜋
4.
(26)
0 TT/8
−1
1
3T/8 5T/8 7T/8
Figure 7: Trapezium type force.
Using the above coefficients, the oscillating force is
𝑓2
(𝜙, 𝑡) = 𝑚𝜔2 cos𝜙
16
𝜋2
×
∞
∑𝑘=0
1
𝑘2sin 𝑘
𝜋
4sin 𝑘𝜔𝑡,
(27)
and the effective potential energy is
𝑈eff = 𝑈 + 𝑚𝜔2cos2𝜙 ⋅
1
4(
16
𝜋2)2
×
∞
∑𝑘=0
1
𝑘6sin2𝑘𝜋
4
= 𝑈 + 0.3393𝑚𝜔2cos2𝜙
(28)
which has extrema at 𝜙 = 0, 𝜋, ±arccos 1.4736𝑔𝑙/𝜔2. Here,
(i) the point 𝜙 = 0 is stable if 𝜔2
< 1.4736𝑔𝑙,
(ii) the point 𝜙 = 𝜋 is not stable,
(iii) the point given by cos𝜙 = 1.4736𝑔𝑙/𝜔2 is stable if
𝜔2
> 1.4736𝑔𝑙.
From (iii), it is observed that, at nontrivial position, theoscillator is stabilized with lower frequency as compared toharmonic force. So this type of force is much effective thansin- or cos-type force. Next, modify this trapezium shapeforce to have a better result.
4.4. Quadratic Type Force. If slopes are removed in thebeginning and at the end from it and define a quadratic typeforce: 𝑄
𝑐(𝑡) = 𝑄
𝑐(𝑡 + 𝑇) (see Figure 8), given by (29)
𝑄𝑐(𝑡) =
{{{{{{{{
{{{{{{{{
{
1 if 0 ≤ 𝑡 <3𝑇
8,
8
𝑇(
𝑇
2− 𝑡) if 3𝑇
8≤ 𝑡 <
5𝑇
8,
−1 if 5𝑇
8≤ 𝑡 < 𝑇,
(29)

Journal of Nonlinear Dynamics 5
0 T
−1
1
3T/8 5T/8
Figure 8: Quadratic type force.
with the same property 𝑄𝑐
= 0. For horizontal modulation,the oscillating force is
𝑓2
(𝜙, 𝑡) = 𝑚𝜔2 cos𝜙 ⋅ 𝑄
𝑐(𝑡, 𝑛) . (30)
The Fourier expansion of (30) is
𝑄𝑐(𝑡) = 𝑚𝜔
2 cos𝜙
×
∞
∑𝑘=0
(2
𝑘𝜋+
8
𝜋2𝑘2sin 𝑘
𝜋
4) sin 𝑘𝜔𝑡,
(31)
and the effective potential energy is
𝑈eff = 𝑈 + 𝑚𝜔2cos2𝜙
⋅1
4
∞
∑𝑘=0
1
𝑘2(
2
𝑘𝜋+
8
𝜋2𝑘2sin 𝑘
𝜋
4)2
= 𝑈 + 0.3856𝑚𝜔2cos2𝜙
(32)
which has extrema at 𝜙 = 0, 𝜋, ±arccos 1.2967𝑔𝑙/𝜔2. Here,
(i) the position 𝜙 = 0 is stable if 𝜔2
< 1.2967𝑔𝑙,
(ii) the position 𝜙 = 𝜋 is not stable,
(iii) the position 𝜙 = arccos 1.2967𝑔𝑙/𝜔2 is stable if 𝜔
2>
1.2967𝑔𝑙.
Again the frequency of oscillation is lower at nontrivialposition.
4.5. Rectangular Type Force. Now if we introduce rectangulartype force: 𝑅
𝑙(𝑡) = 𝑅
𝑙(𝑡 + 𝑇) (see Figure 9), given by (33)
𝑅𝑙(𝑡) =
{{
{{
{
1 0 ≤ 𝑡 ≤𝑇
2
−1𝑇
2≤ 𝑡 ≤ 𝑇
(33)
with the same property 𝑅𝑙
= 0. For horizontal modulation,the force acting on the particle is
𝑓 (𝑡) = 𝑚𝜔2 cos𝜙 ⋅ 𝑅
𝑙(𝑡, 𝑛) , (34)
0 T
−1
1
T/2
Figure 9: Rectangular type force.
and its Fourier expansion is
𝑅𝑙(𝑡) = 𝑚𝜔
2 cos𝜙4
𝜋
×
∞
∑𝑘=0
1
(2𝑘 − 1)sin (2𝑘 − 1) 𝜔𝑡;
(35)
the effective potential energy is
𝑈eff = 𝑈 + 𝑚𝜔2cos2𝜙
⋅1
4(
16
𝜋2)2 ∞
∑𝑘=0
1
(2𝑘 − 1)4
= 𝑈 + 0.4112𝑚𝜔2cos2𝜙
(36)
which has extrema at 𝜙 = 0, 𝜋, ±arccos 1.2159𝑔𝑙/𝜔2. Here,
(i) the point 𝜙 = 0 is stable if 𝜔2
< 1.2159𝑔𝑙,
(ii) the point 𝜙 = 𝜋 is not stable,
(iii) the point 𝜙 = arccos 1.2159𝑔𝑙/𝜔2 is stable if 𝜔
2>
1.2159𝑔𝑙 [13, 14].
From (iii), it is observed that, at nontrivial position with thehelp of this type of external force, the frequency of oscillationhas become much lower. At nontrivial position, the aboveresults are summarized in Table 1. From these results, it isalso observed that, as the area under the curve increases, thefrequency of oscillation decreases, at nontrivial position.Thetriangular type force hasminimumarea and so hasmaximumfrequency, while rectangular type force has maximum areaand has minimum frequency.
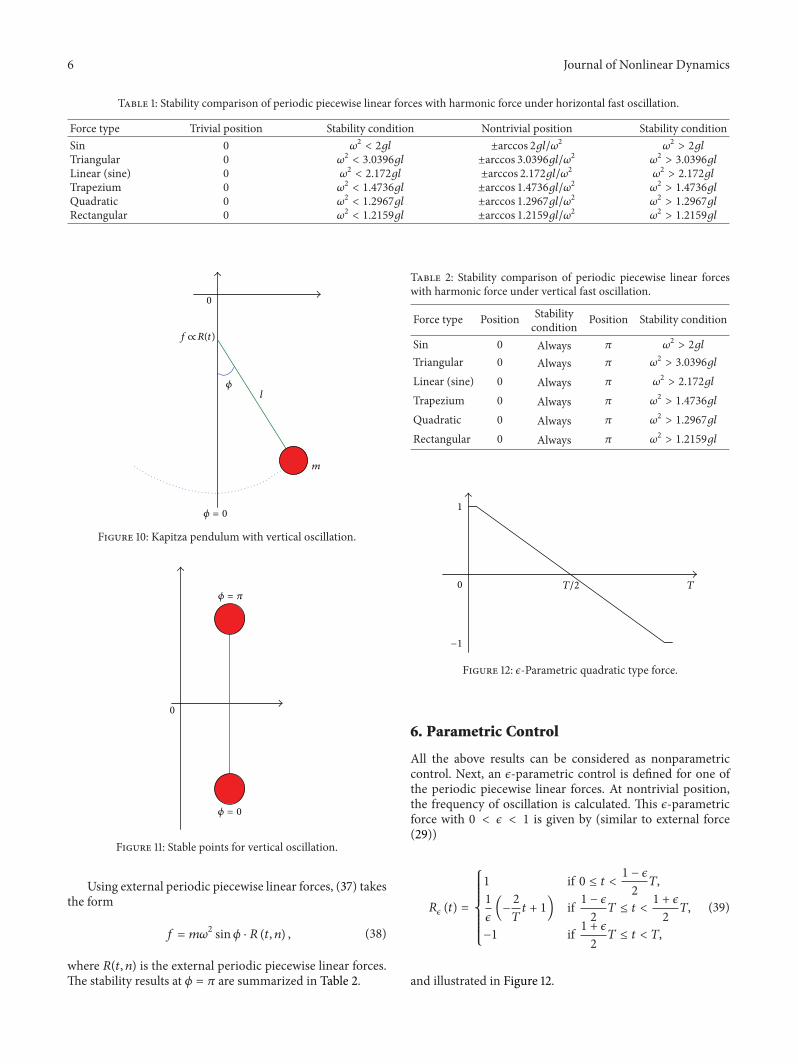
5. Vertical Modulation
For vertical modulation with harmonic force (see Figure 10),the fast oscillating force is
𝑓2
= 𝑚𝜔2 sin𝜙 ⋅ sin𝜔𝑡. (37)
Here, the position 𝜙 = 0 is always stable, and the inversepoint 𝜙 = 𝜋 is stable if 𝜔
2> 2𝑔𝑙 (see Figure 11) [5].
6 Journal of Nonlinear Dynamics
Table 1: Stability comparison of periodic piecewise linear forces with harmonic force under horizontal fast oscillation.
Force type Trivial position Stability condition Nontrivial position Stability conditionSin 0 𝜔
2< 2𝑔𝑙 ±arccos 2𝑔𝑙/𝜔
2𝜔2
> 2𝑔𝑙
Triangular 0 𝜔2
< 3.0396𝑔𝑙 ±arccos 3.0396𝑔𝑙/𝜔2
𝜔2
> 3.0396𝑔𝑙
Linear (sine) 0 𝜔2
< 2.172𝑔𝑙 ±arccos 2.172𝑔𝑙/𝜔2
𝜔2
> 2.172𝑔𝑙
Trapezium 0 𝜔2
< 1.4736𝑔𝑙 ±arccos 1.4736𝑔𝑙/𝜔2
𝜔2
> 1.4736𝑔𝑙
Quadratic 0 𝜔2
< 1.2967𝑔𝑙 ±arccos 1.2967𝑔𝑙/𝜔2
𝜔2
> 1.2967𝑔𝑙
Rectangular 0 𝜔2
< 1.2159𝑔𝑙 ±arccos 1.2159𝑔𝑙/𝜔2
𝜔2
> 1.2159𝑔𝑙
f∝R(t)
0
𝜙
𝜙 = 0
l
m
Figure 10: Kapitza pendulum with vertical oscillation.
0
𝜙 = 𝜋
𝜙 = 0
Figure 11: Stable points for vertical oscillation.
Using external periodic piecewise linear forces, (37) takesthe form
𝑓 = 𝑚𝜔2 sin𝜙 ⋅ 𝑅 (𝑡, 𝑛) , (38)
where 𝑅(𝑡, 𝑛) is the external periodic piecewise linear forces.The stability results at 𝜙 = 𝜋 are summarized in Table 2.
Table 2: Stability comparison of periodic piecewise linear forceswith harmonic force under vertical fast oscillation.
Force type Position Stabilitycondition Position Stability condition
Sin 0 Always 𝜋 𝜔2
> 2𝑔𝑙
Triangular 0 Always 𝜋 𝜔2
> 3.0396𝑔𝑙
Linear (sine) 0 Always 𝜋 𝜔2
> 2.172𝑔𝑙
Trapezium 0 Always 𝜋 𝜔2
> 1.4736𝑔𝑙
Quadratic 0 Always 𝜋 𝜔2
> 1.2967𝑔𝑙
Rectangular 0 Always 𝜋 𝜔2
> 1.2159𝑔𝑙
0 T
−1
1
T/2
Figure 12: 𝜖-Parametric quadratic type force.
6. Parametric Control
All the above results can be considered as nonparametriccontrol. Next, an 𝜖-parametric control is defined for one ofthe periodic piecewise linear forces. At nontrivial position,the frequency of oscillation is calculated. This 𝜖-parametricforce with 0 < 𝜖 < 1 is given by (similar to external force(29))
𝑅𝜖(𝑡) =
{{{{{
{{{{{
{
1 if 0 ≤ 𝑡 <1 − 𝜖
2𝑇,
1
𝜖(−
2
𝑇𝑡 + 1) if 1 − 𝜖
2𝑇 ≤ 𝑡 <
1 + 𝜖
2𝑇,
−1 if 1 + 𝜖
2𝑇 ≤ 𝑡 < 𝑇,
(39)
and illustrated in Figure 12.

Journal of Nonlinear Dynamics 7
The Fourier coefficient 𝑎0
= 0 indicates 𝑅𝜖
= 0. Forhorizontal modulation, the oscillating force acting on theparticle is
𝑓2
(𝜙, 𝑡) = 𝑚𝜔2 cos𝜙 ⋅ 𝑅
𝜖(𝑡, 𝑛) . (40)
With (39), the Fourier coefficients are
𝑎𝑘
= 0
𝑏𝑘
= 𝑚𝜔2 cos𝜙 (
2
(𝑘𝜋)+
2
𝜖𝑘2𝜋2sin 𝜖𝑘𝜋) ,
(41)
and the oscillating force in fourier expansion is
𝑓2
(𝑡) = 𝑚𝜔2 cos𝜙
×
∞
∑𝑘=1
(2
(𝑘𝜋)+
2
𝜖𝑘2𝜋2sin 𝜖𝑘𝜋) sin 𝑘𝜔𝑡.
(42)
The effective potential energy is
𝑈eff = 𝑈 + 𝑚𝜔2cos2𝜙
⋅1
4𝜋2
∞
∑𝑘=1
4
𝑘4(1 +
1
𝜖𝑘𝜋sin 𝜖𝑘𝜋)
2
= −𝑚𝑔𝑙 cos𝜙 + 𝑚𝜔2cos2𝜙 ⋅ 𝑏,
(43)
where
𝑏 =1
𝜋2
∞
∑𝑘=1
1
𝑘4(1 +
1
𝜖𝑘𝜋sin 𝜖𝑘𝜋)
2
(44)
which has extremum at 𝜙 = 0, 𝜋, ±arccos 0.5𝑔𝑙/𝜔2𝑏.
The stability of the system is discussed under the forcewith different values of 𝜖. See Figure 13. First of all consider𝜖 = 0.9; the infinite sum is
𝑏 = 0.1320, (45)
and the effective potential energy is
𝑈eff = −𝑚𝑔𝑙 cos𝜙 + 0.132𝑚𝜔2cos2𝜙⋅ (46)
The nontrivial position ±arccos (3.7879𝑔𝑙/𝜔2) is stable under
the condition 𝜔2
> 3.7879𝑔𝑙. This value is larger thanthe above considered examples, such a poor result. Nextfor 𝜖 = 0.8, the infinite sum is 0.1607, and the nontrivialposition ±arccos (3.1114𝑔𝑙/𝜔
2) is stable if 𝜔
2> 3.1114𝑔𝑙,
such a better result. Also, it is found that, as 𝜖 decreases, theinfinite sum 𝑏 increases and the system is stabilized with arelatively low frequency. For different values of 𝜖, the results ofinfinite sum 𝑏 and the nontrivial position ±arccos 0.5𝑔𝑙/𝜔
2𝑏
with stable condition are given in Table 3.Also as 𝜖 → 0, the term 𝑏 ≅ 0.4386, and the position
±arccos (1.14𝑔𝑙/𝜔2) is stable under the condition𝜔
2> 1.14𝑔𝑙
which is lower than with rectangular type force. Hence, withparametric control, the rectangular type force is approached,and the system is stabilized with a relatively low frequency.
0 T
−1
1
T/2
Figure 13: Quadratic type force with different 𝜖 (0.9 − 0.1).
Table 3: Stability conditions with 𝜖-parametric force.
𝜖
0 < 𝜖 < 1
Sum𝑏
Nontrivial position Stability condition
0.9 0.1320 ±arccos (3.7879𝑔𝑙/𝜔2) 𝜔
2> 3.7879𝑔𝑙
0.8 0.1607 ±arccos (3.1114𝑔𝑙/𝜔2) 𝜔
2> 3.1114𝑔𝑙
0.75 0.1775 ±arccos (2.8169𝑔𝑙/𝜔2) 𝜔
2> 2.8169𝑔𝑙
0.7 0.1956 ±arccos (2.5562𝑔𝑙/𝜔2) 𝜔
2> 2.5562𝑔𝑙
0.6 0.2357 ±arccos (2.1213𝑔𝑙/𝜔2) 𝜔
2> 2.1213𝑔𝑙
0.5 0.2793 ±arccos (1.7902𝑔𝑙/𝜔2) 𝜔
2> 1.7902𝑔𝑙
0.4 0.3239 ±arccos (1.5437𝑔𝑙/𝜔2) 𝜔
2> 1.5437𝑔𝑙
0.3 0.3664 ±arccos (1.3647𝑔𝑙/𝜔2) 𝜔
2> 1.3647𝑔𝑙
0.25 0.3856 ±arccos (1.2967𝑔𝑙/𝜔2) 𝜔
2> 1.2967𝑔𝑙
0.2 0.4029 ±arccos (1.241𝑔𝑙/𝜔2) 𝜔
2> 1.241𝑔𝑙
0.1 0.4287 ±arccos (1.1663𝑔𝑙/𝜔2) 𝜔
2> 1.1663𝑔𝑙
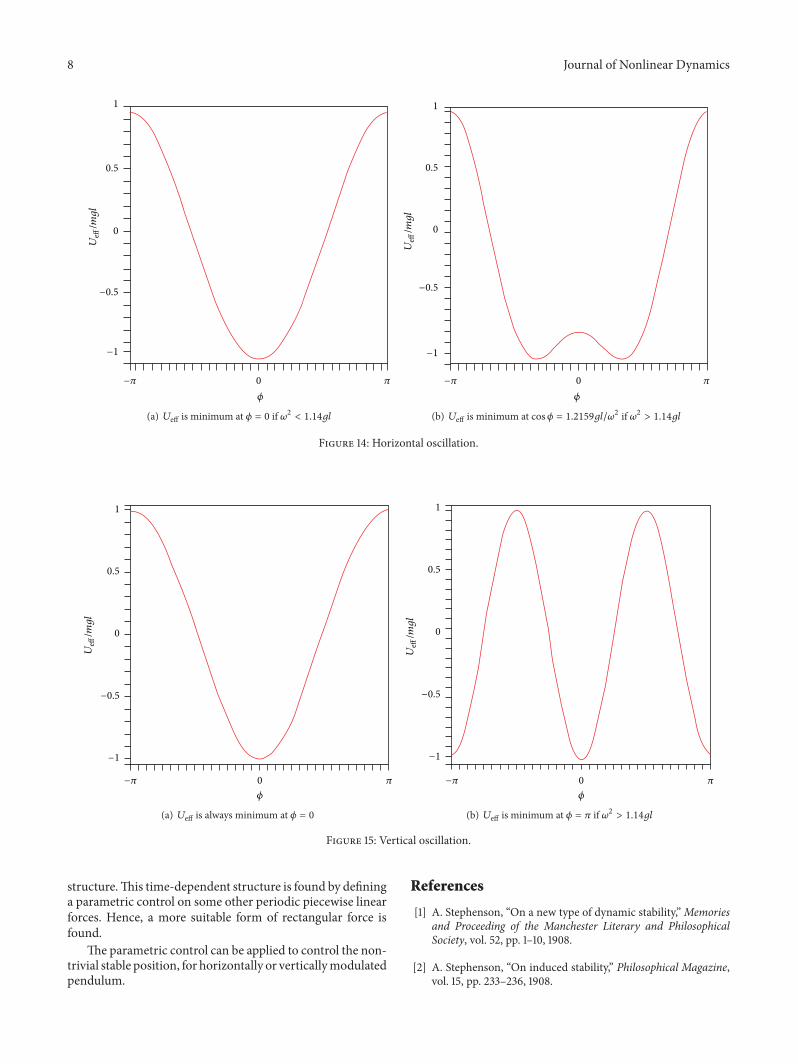
Theminimization of dimensionless effective potential energyfunction with horizontal modulation is shown in Figure 14and with vertical modulation is shown in Figure 15.Here, the same effect is also observed; as 𝜖 decreases, thearea under the curve increases, and the value of 𝑏 increases;consequently, the frequency of oscillation becomes low atnontrivial position. In this connection, an interesting result isobtained; when 𝜖 → 0, the quadratic type force approachesthe rectangular type force, so at nontrivial position thefrequency of oscillation should be almost the same, but, withparametric force, the frequency of oscillation is low. Observefrom Table 3, the rectangular force fall between 𝜖 = 0.2
and 𝜖 = 0.1, more clearly, the parametric force with 𝜖 =
0.17 . . ., gives the frequency of oscillation almost equals withrectangular type force, hence comparatively less area showslow frequency at non-trivial position.
7. Conclusions
Using Kapitza method of averaging for an arbitrary periodicforce, the modulated pendulum with periodic piecewiselinear force is stabilized with frequency 𝜔 that is sufficientlylesser than that in the case of harmonic modulation. Inthis contest, rectangular force was found to be the best. Butthis force is more effective when it has a time-dependent
8 Journal of Nonlinear Dynamics
−𝜋 𝜋0
−1
−0.5
0
0.5
1
𝜙
Ueff/m
gl
(a) 𝑈eff is minimum at 𝜙 = 0 if 𝜔2 < 1.14𝑔𝑙
−1
−0.5
0
0.5
1
−𝜋 𝜋0𝜙
Ueff/m
gl
(b) 𝑈eff is minimum at cos𝜙 = 1.2159𝑔𝑙/𝜔2 if 𝜔2 > 1.14𝑔𝑙
Figure 14: Horizontal oscillation.
−𝜋 𝜋0𝜙
−1
−0.5
0
0.5
1
Ueff/m
gl
(a) 𝑈eff is always minimum at 𝜙 = 0
−𝜋 𝜋0𝜙
−1
−0.5
0
0.5
1
Ueff/m
gl
(b) 𝑈eff is minimum at 𝜙 = 𝜋 if 𝜔2 > 1.14𝑔𝑙
Figure 15: Vertical oscillation.
structure.This time-dependent structure is found by defininga parametric control on some other periodic piecewise linearforces. Hence, a more suitable form of rectangular force isfound.
The parametric control can be applied to control the non-trivial stable position, for horizontally or verticallymodulatedpendulum.
References
[1] A. Stephenson, “On a new type of dynamic stability,”Memoriesand Proceeding of the Manchester Literary and PhilosophicalSociety, vol. 52, pp. 1–10, 1908.
[2] A. Stephenson, “On induced stability,” Philosophical Magazine,vol. 15, pp. 233–236, 1908.

Journal of Nonlinear Dynamics 9
[3] A. Stephenson, “On induced stability,” Philosophical Magazine,vol. 17, pp. 765–766, 1909.
[4] P. L. Kapitza, “Dynamic stability of a pendulum with anoscillating point of suspension,” Journal of Experimental andTheoretical Physics, vol. 21, pp. 588–597, 1951.
[5] L. D. Landau, E. M. Lifshitz, and Mecanics, vol. 15, PergamonPress: butterworth, Oxford, UK, 3rd edition, 2005.
[6] L. S. Brown, “Quantum motion in a Paul trap,” Physical ReviewLetters, vol. 66, no. 5, pp. 527–529, 1991.
[7] W. Paul, “Electromagnetic traps for charged and neutral parti-cles,”Reviews ofModern Physics, vol. 62, no. 3, pp. 531–540, 1990.
[8] I. Gilary, N. Moiseyev, S. Rahav, and S. Fishman, “Trapping ofparticles by lasers: the quantum Kapitza pendulum,” Journal ofPhysics A, vol. 36, no. 25, pp. L409–L415, 2003.
[9] F. Bullo, “Averaging and vibrational control of mechanicalsystems,” SIAM Journal on Control andOptimization, vol. 41, no.2, pp. 542–562, 2003.
[10] Y. Nakamura, T. Suzuki, andM. Koinuma, “Nonlinear behaviorand control of a nonholonomic free-joint manipulator,” IEEETransactions on Robotics and Automation, vol. 13, no. 6, pp. 853–862, 1997.
[11] J. A. Hołyst and W. Wojciechowski, “The effect of Kapitzapendulum and price equilibrium,” Physica A, vol. 324, no. 1-2,pp. 388–395, 2003.
[12] A. L. Fradkov, “Application of cybernetic methods in physics,”Physics-Uspekhi, vol. 48, no. 2, pp. 103–127, 2005.
[13] B. Ahmad and S. Borisenok, “Control of effective potentialminima for Kapitza oscillator by periodical kicking pulses,”Physics Letters A, vol. 373, no. 7, pp. 701–707, 2009.
[14] B. Ahmad, “Stabilization of Kapitza oscillator by symmetricperiodical forces,” Nonlinear Dynamics, vol. 62, no. 3, pp. 499–506, 2010.
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Hindawi Publishing Corporation http://www.hindawi.com
Journal ofEngineeringVolume 2014
Submit your manuscripts athttp://www.hindawi.com
VLSI Design
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation http://www.hindawi.com
Volume 2014
The Scientific World JournalHindawi Publishing Corporation http://www.hindawi.com Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Modelling & Simulation in EngineeringHindawi Publishing Corporation http://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
DistributedSensor Networks
International Journal of