research article robust adaptive filter for small...
TRANSCRIPT

Research ArticleRobust Adaptive Filter for Small Satellite Attitude EstimationBased on Magnetometer and Gyro
Zhankui Zeng1 Shijie Zhang1 Yanjun Xing2 and Xibin Cao1
1 Research Center of Satellite Technology Harbin Institute of Technology Harbin 150080 China2 Beijing Institute of Spacecraft System Engineering China Academy of Space Technology Beijing 100094 China
Correspondence should be addressed to Shijie Zhang sjzhanghiteducn
Received 1 March 2014 Revised 4 May 2014 Accepted 4 May 2014 Published 26 May 2014
Academic Editor Hamid Reza Karimi
Copyright copy 2014 Zhankui Zeng et al This is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
Based on magnetometer and gyro measurement a sequential scheme is proposed to determine the orbit and attitude of smallsatellite simultaneously In order to reduce the impact of orbital errors on attitude estimation a robust adaptive Kalman filteris developed It uses a scale factor and an adaptive factor which are constructed by Huber function and innovation sequencerespectively to adjust the covariance matrix of system state and observational noise change the weights of predicted and measuredparameters get suitable Kalman filter gain and approximate optimal filtering results Numerical simulations are carried out andthe proposed filter is approved to be robust for the noise disturbance and parameter uncertainty and can provide higher accuracyattitude estimation
1 Introduction
Small satellite as an integration of new concept new theoryand new method has been widely used in the fields ofremote sensing communication astronomical observationand new technology experiment Restricted by the size andweight of small satellite microsensors are required to beused in its navigation system Magnetometer is widely usedin the satellite because of its characteristics of low cost andhigh reliability [1] Especially micromagnetometer with newtechnologies such as microelectronics and micromechanicalcan be made as light as dozens of grams And its measuringinformation contains both the orbit and attitude informationFor the above reasons micromagnetometer became the firstchoice of the small satellite navigation sensors But becauseof the low accuracy of magnetic field measurement satellitenavigation precision especially the attitude angular velocityestimation precision is not high So the magnetometer andgyro combination can significantly improve the navigationaccuracy
In 1993 Psiaki put forward the thought of the satellite nav-igation by using the geomagnetic field [2]Then many schol-ars made a lot of work on it and have made a lot of researchachievements [3ndash5] In current research satellite orbit and
attitude are mostly considered as two independent systemswhen determining them and tandem orbit and attitude deter-mination strategy are taken In the orbital state estimationstage to avoid the influence of attitude errors the modulusof geomagnetic field vector is taken as observed quantityAnd in the attitude determination stage orbital parametersare considered to be known attitude optimal estimation isobtained by using the standard Kalman filtering algorithmregardless of the influence of orbit determination errors[6]
However in the attitude determination stage both stateequation and observation equation of system are functionsof orbit parameters On this occasion the errors of orbitparameters given by orbit filter are bigger and especiallywhen the system has not been convergent the traditionalKalman filter will not be able to obtain the optimal results ofattitude determination It is necessary to put forward a kind offiltering algorithm to realize high precision attitude determi-nation considering the effects of orbit errors
Extended Kalman filtering (EKF) algorithm has beenwidely used in the nonlinear estimation problem such assatellite attitude determination The estimation performanceof EKF is not only associated with the model precision ofsystem but also related to the statistical characteristic of
Hindawi Publishing CorporationAbstract and Applied AnalysisVolume 2014 Article ID 159149 7 pageshttpdxdoiorg1011552014159149
2 Abstract and Applied Analysis
noise But in practice due to the complex surroundings thecharacteristics of the noise are very difficult to get accurately[7] Traditional EKF does not have the adjust ability fornoise and is not sensitive to uncertainty of model parameterswhich directly affects the estimation performance of EKF Inorder to solve these problems the traditional EKF needs to beimproved A feasible method is to use adaptive Kalman filter-ing It can estimate online the statistical characteristic of thenoise in real time so as to adjust the filter parameter [8]Manyresults on estimation and adaptive filtering design for dif-ferent kinds of dynamic systems have been obtained [9ndash18]Adaptive filtering can be divided into three basic types mul-timode self-adaptive filtering self-adaptive filtering based onthe innovation and adaptive filtering based on the residual[19] Multimode adaptive filtering requires multiple filtersthey are calculated in parallel according to the differentmodel This method is not only complex but also with heavycomputing burdens [20] In the self-adaptive filter basedon innovation or residual covariance matrix could adjustadaptively according to the innovation or residual sequencethrough fuzzy logic control But the fuzzy rules are oftenestablished based on peoplersquos experience [21 22] The otherfeasible method is adaptive fading Kalman filter It uses asuboptimal fading factor to enhance the impact of innovationsequence but filtering accuracy will be reduced [23]
For the attitude determination problem considered inthis paper there is still some limitations by using the aboveimproved EKF method singly So on the basis of the aboveresearch a robust adaptive Kalman filtering has been raisedin this paper It combines the robust filtering methods andadaptive filtering By adjusting the observation noise and thesystem covariance matrix it changes the weights of originaldata and observation information in the filter and then getsmore reasonable filter gain and effectively improves attitudedetermination accuracy which provide a feasible way forsmall satellite autonomous navigation problem based on low-cost sensors
2 Problem Description
For the satellite orbit and attitude determination problembased on magnetometer and gyro a sequential scheme isadopted in which the determination of orbit and attitude areconsidered as two independent stages In the stage of estimat-ing orbit states xorb in order to avoid the influence of satelliteattitude EKF is taken to determine the orbit parameters bytaking the modulus of geomagnetic field vector measuredby magnetometer as observation In attitude determinationstage filtering algorithm is adopted to estimate attitude usingthe estimated orbital parameters and geomagnetic field vec-tor as well as gyro measurement see Figure 1 Orbit estima-tion stage will not be studied in this paper because there havebeen a lot of research results about it see [3] By the reasonof taking the sequential orbit and attitude determinationscheme the attitude determination is not only affected by theprecision of sensor precision but also affected by the precisionof orbit estimation Focusing on the attitude determinationstage a satellite attitude determination algorithm which caninhibit the influence of orbit errors is put forward
Orbitfilter
Attitudefilter
z = |Bb|
z = Bb
x orb
x orbx att
u
Figure 1 Sequential orbit and attitude determination scheme
Satellite attitude kinematics equation can be described as
q = 1
2
Ω (120596bo) q (1)
where q = [1199021 119902
2 119902
3 119902
4]
119879 represents the attitude quaternionfrom orbital coordinate system to body coordinate systemand 120596bo = [120596bo1 120596bo2 120596bo3]
119879 represents the body angularvelocity relative to orbital coordinate system And Ω(120596bo) iswritten as
Ω (120596bo) =[
[
[
[
0 120596bo3 minus120596bo2 120596bo1minus120596bo3 0 120596
1198871199001120596bo2
120596bo2 minus120596bo1 0 120596bo3minus120596bo1 minus120596bo2 minus120596bo3 0
]
]
]
]
(2)
The gyro measurement model usually takes the followingform
u = 120596 + b + 1205781 (3)
where u is the actual output value of gyro 120596 is the bodyinertial angular velocity b is the gyro constant drift and 120578
1is
the Gaussian white noise with the variance of 1205902119892
The body inertial angular velocity is calculated in (3)Consider
120596 = u minus b minus 1205781 (4)
And approximately
b = 1205782 (5)
where 1205782is drift slope white noise of gyro 120578
2sim 119873(0 120575
2
119887)
In the satellite attitude kinematics equation the bodyangular velocity relative to orbital coordinate system can becalculated by the following equation
120596bo = 120596 minus C (q)120596119900 (6)
whereC(q) is the attitude transformationmatrix from orbitalcoordinate system to body coordinate system and 120596
119900repre-
sents the orbit angular velocity which can be obtained fromorbit parameters
When determining the attitude taking three-axis mag-netic field vector measured by magnetometer as observationthe observation equation is
B119887= h (xorb q) + v
119861= C (q)B
119900(xorb) + v
119861 (7)
Abstract and Applied Analysis 3
where B119887represents the actual measured value of magne-
tometer and B119900(xorb) is the magnetic field vector in the
orbital coordinate system which can be calculated by IGRFv119861represents magnetometer measurement errors which is
Gaussian white noiseIt is can be seen from (6) and (7) that both the system
state equation and observation equation are functions of orbitparameters in the process of attitude determination But thereal value of orbit parameters cannot be gotten so we canonly use the result of orbit filter to replace them So addi-tional errors were introduced for the system Therefore thetraditional Kalman filter will not be able to obtain the optimalresults of altitude determination The errors that occurredin this part can be considered as parameter uncertainty Thepurpose of this paper is to design a robust adaptive filter tocope with the attitude determination problem caused by theuncertainty of orbital parameters and improve the accuracyof attitude determination
3 Robust Adaptive Filtering Algorithm forAttitude Determination
Satellite attitude determination system is a continuous non-linear system and it should be linearized and discretized forapplication of EKF filtering For convenience of derivationrobust adaptive filter for linear discrete system is firstly con-sidered in this section and then it is extended to nonlinearcontinuous system
31 The Design of Robust Adaptive Filter Consider the lineardiscrete system
x119896= Φ119896minus1
x119896minus1
+ w119896minus1 (8a)
z119896= H119896x119896+ v119896 (8b)
where x119896represents 119899 times 1 state vector z
119896represents 119898 times 1
observation vector and Φ119896minus1
and H119896are the state transition
matrix and the observationmatrix respectivelyw119896and v119896are
the process noise and observation noise with average of 0 andvariance ofQ and R respectively
In the process of filtering state one-step prediction can beexpressed as
x119896(minus) = Φ
119896minus1x119896minus1 (9)
and the covariance of one-step prediction error is
P119896(minus) = Φ
119896minus1P119896minus1Φ119879
119896minus1+Q119896minus1 (10)
The prediction state residual vector and themeasurementresidual vector can be defined as (11) respectively
v119909119896(minus)
= x119896(+) minus x
119896(minus) = x
119896(+) minusΦ
119896minus1x119896minus1
(+)
v119896= H119896x119896(+) minus z
119896
(11)
According to rule of robustness build the followingextreme function based on residual equation (11)
Ω119896= v119879119896Rminus1119896v119896+ 120572
119896v119879119909119896(minus)
Pminus1119896(minus) v119909119896(minus)
minus 2120582
119879
119896(H119896x119896(+) minus z
119896minus v119896)
(12)
where R119896is the equivalent covariance matrix of 119911
119896 which is
the adaptive estimate ofmeasuring covariancematrix120572119896(0 lt
120572
119896le 1) is the adaptive factor and 120582
119896is Lagrangian multiplier
Take the partial respect of (12) to v119896and x
119896(+) respec-
tively then let them be equal to 0
120597Ω119896
120597v119896
= 2v119879119896Rminus1119896+ 2120582
119879
119896= 0
120597Ω119896
120597x119896
= 2v119879119896Rminus1119896H119896+ 2120572
119896v119879119909119896(minus)
Pminus1119896(minus) minus 2120582
119879
119896H119896= 0
(13)
According to (13) it is can be deduced that
2H119879119896Rminus1119896v119896+ 120572
119896Pminus119879119896(minus) v119909119896(minus)
= 0(14)
Substituting (11) in (14) we obtain
2H119879119896Rminus1119896(H119896x119896(+) minus z
119896) + 120572
119896Pminus119879119896(minus) (x
119896(+) minus x
119896(minus)) = 0
(15)
From (15) we have
x119896(+) = (H119879
119896Rminus1119896H119896+
120572
119896
2
Pminus1119896(minus))
minus1
times (H119879119896Rminus1119896z119896+
120572
119896
2
Pminus1119896(minus) x119896(minus))
(16)
Let
K119896= (H119879119896Rminus1119896H119896+
120572
119896
2
Pminus1119896(minus))
minus1
H119879119896Rminus1119896
(17)
Then (16) can be written as
x119896(+) = K
119896[z119896+ (Kminus1119896minusH119896) x119896(minus)] (18)
Further we can write (17) as
K119896=
1
120572
119896
P119896(minus)H119879119896(
1
120572
119896
H119896P119896(minus)H119879119896+ R119896)
minus1
(19)
So the robust adaptive filtering algorithm for lineardiscrete system can be described as
x119896(minus) = Φ
119896minus1x119896minus1 (20a)
P119896(minus) =
1
120572
119896
(Φ119896minus1
P119896minus1
(+)Φ119879
119896minus1+Q119896) (20b)
K119896= P119896(minus)H119879119896(H119896P119896(minus)H119879119896+ R119896)
minus1
(20c)
x119896(+) = K
119896[z119896+ (Kminus1119896minusH119896) x119896(minus)]
= x119896(minus) + K
119896(z119896minusH119896x119896(minus))
(20d)
P119896(+) = (I minus K
119896H119896)P119896(minus) (20e)
4 Abstract and Applied Analysis
32 The Equivalent Covariance Matrix R119896of Observation
Vector z119896 From [24] the equivalent covariance matrix can
be obtained from bifactor variance expanding model whoseelement is
120590
119896119894119895=radic120582
119894radic120582
119895120590
119896119894119895
(21)
where 120590119896119894119895
is the corresponding element of prior variancecovariance and R
119896 120582119894 and 120582
119895are variance inflation factors
which can be taken as the reciprocal of Huber weightfunction that is
120582
119894119894=
1
1003816
1003816
1003816
1003816
V119894
1003816
1003816
1003816
1003816
=
1003816
1003816
1003816
1003816
1003816
1003816
1003816
1003816
1003816
V119894
120590V119894
1003816
1003816
1003816
1003816
1003816
1003816
1003816
1003816
1003816
le 119888
1003816
1003816
1003816
1003816
V119894
1003816
1003816
1003816
1003816
119888
1003816
1003816
1003816
1003816
V119894
1003816
1003816
1003816
1003816
ge 119888
(22)
where 119888 is constant and 119888 = 10 sim 15 V119894is standard-
ized residual Therefore the observation covariance matrixinflates when the observed error exceeds a certain rangeOtherwise the prior variance remains unchanged
33 The Selection of Adaptive Factor 120572119896 Because the innova-
tion vector can reflect the errors of the system we considersolving the adaptive factor by using innovation
In the process of filtering the innovation sequence can bedescribed as
vinn119896 = z119896minusH119896x119896(minus) (23)
and its theoretical covariance matrix is
Pinn119896 = H119896P119896(minus)H119879119896+ R119896 (24)
It can be seen from (20a)ndash(20e) in robust adaptivefiltering innovation covariance is adjusted to
Pinn119896 =1
120572
119896
H119896P119896(minus)H119879119896+ R119896 (25)
Considering that Pinn119896 represent actual innovationcovariance matrix the optimal adaptive factor 120572
119896based on
innovation covariance satisfies
Pinn119896 = Pinn119896 (26)
That is
Pinn119896 =1
120572
119896
H119896P119896(minus)H119879119896+ R119896 (27)
From (27) we obtain
120572
119896(
Pinn119896 minus R119896) = H
119896P119896(minus)H119879119896 (28)
Substituting (24) in (28) we have
120572
119896(
Pinn119896 minus R119896) = Pinn119896 minus R
119896 (29)
So the optimal adaptive factor could be expressed as
120572
119896=
tr (Pinn119896 minus R119896)
tr (Pinn119896 minus R119896)
(30)
As the value range of adaptive factor 120572119896is (0 1]
120572
119896=
1 tr (Pinn119896) ge tr (Pinn119896)
tr (Pinn119896 minus R119896)
tr (Pinn119896 minus R119896)
tr (Pinn119896) lt tr (Pinn119896) (31)
where tr(sdot) is trace of matrix By omitting the same items in(31) an approximate optimal adaptive factor can be obtained
120572
119896=
1 tr (Pinn119896) ge tr (Pinn119896)
tr (Pinn119896)
tr (Pinn119896)tr (Pinn119896) lt tr (Pinn119896)
(32)
Using the innovation vector of current sampling time todescribe the real covariance we have
Pinn119896 = Vinn119896V119879
inn119896 (33)
Consider
tr (Pinn119896) = V119879inn119896Vinn119896 (34)
The approximate optimal adaptive factor can be describedas
120572
119896=
1 tr (Pinn119896) ge tr (Pinn119896)
tr (Pinn119896)
V119879inn119896Vinn119896tr (Pinn119896) lt tr (Pinn119896)
(35)
Compared with the standard EKF the robust adaptivefiltering only adds a judgment process of two scalar factors inthe loop of each step the complexity and calculated quantityof which will not be increased substantially When the vari-ance inflation factor120582
119894119894= 1 thismeans that themeasurement
noise is the same as the original statistical characteristic therobust adaptive filtering degenerate into adaptive filteringWhen the adaptive factor 120572
119896= 1 it degenerates into robust
filtering When 120582
119894119894= 1 and 120572
119896= 1 it is the traditional
Kalman filtering So the robust adaptive filtering is stillKalman filtering substantially which is capable of adapting tothe influence of uncertain factors by adjusting the parametersproperly and can realize the states estimate in the conditionof uncertain factors
For nonlinear continuous system
x = 119891 (x) + w (36a)
z = ℎ (x) + v (36b)
Abstract and Applied Analysis 5
By Taylor series expansion and discretization we obtain arobust adaptive filtering algorithm for nonlinear continuoussystem Consider
x119896(minus) = int
119896Δ119905
(119896minus1)Δ119905
119891 (x119896minus1
(+)) 119889119905(37a)
P119896(minus) =
1
120572
119896
(Φ119896minus1
P119896minus1
(+)Φ119879
119896minus1+Q119896) (37b)
K119896= P119896(minus)H119879119896(H119896P119896(minus)H119879119896+ R119896)
minus1 (37c)
x119896(+) = x
119896(minus) + K
119896(z119896minus ℎ (x
119896(minus))) (37d)
P119896(+) = (I minus K
119896H119896)P119896(minus) (37e)
where Φ119896= 119868 + (120597119891(119909)120597119909)|x=x119896(minus) sdot Δ119905 H119896 = (120597ℎ(119909)
120597119909)|x=x119896(minus) and Δ119905 are sampling time steps
4 Mathematical Simulation and Analysis
In this section the performance of the robust adaptivefiltering is verified by mathematical simulation
In the simulation the real parameters ofmicrosatellite aregiven as below
The moment of inertia of satellite is
J = [[
181 04 minus048
04 163 minus461
minus048 minus461 1795
]
]
kgm2 (38)
The initial position and velocity of satellite are
r0= [516306203 427599216 minus856]
119879m
v0= [minus32881720 39649749 52634825]
119879ms(39)
The initial attitude quaternion and angular velocity are
q0= [0 0 0 1]
119879
1205960= [0 0 0]
119879 rads(40)
The measurement accuracy of magnetometer is 100 nTthe constant drift of gyro is 3 degh the measurementaccuracy of it is 01 radh the sampling period is 1 s and thesimulation time is 10000 s
For the determination of orbit taking the earth magneticfield as measurement information and using the standardEKF algorithm for estimation the initial simulation parame-ters are set as follows and the simulation results are shown inFigure 2 to Figure 3
r0= [516406203 427699216 1000]
119879m
v0= [minus31881720 38649749 51634825]
119879ms
Q0= diag ([1 1 1 1 1 1] lowast 1119890 minus 8)
P0= diag ([1000 1000 1000 100 100 100]2)
(41)
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000minus3
minus25
minus2
minus15
minus1
minus05
0
05
1
15
Posit
ion
estim
atio
n er
rors
(m)
Time (s)
times104
Figure 2 Position estimation errors
After determining the satellite orbit parameters takingthe estimated results as the input of the attitude determinesystem attitude robust adaptive filtering algorithm is adoptedto determine the attitude and simulation initial parameters asfollows and the simulation results are shown in Figure 4
q0= [00523 minus00474 00523 09961]
119879
b0= [35 35 35]
119879 deg h
Q0= diag ([1 1 1 1 1 1] lowast 1119890 minus 10)
P0= diag ( [00474 00523 00474 024119890 minus 5
024119890 minus 5 024119890 minus 5]
2)
(42)
Figure 2 shows the three-axis position estimation errorsby taking the magnitude of the geomagnetic field as observa-tion Figure 3 shows the estimation errors of correspondingorbital elements As seen from the figures when the positionerror is 1000meters the effect of the errors cannot be ignoredfor both attitude kinematics equation and the observationequation Figure 4 shows the attitude estimation errors basedon traditional EKF and robust adaptive filter It is can be seenfrom Figure 4 The estimation precision of the traditionalEKF is about 02 degrees and the maximum estimate error ofthe robust adaptive filter proposed in this paper is 01 degreesthe accuracy has improved significantly Furthermore theoscillation of robust adaptive filter estimation results issmaller and the curve is smoother it also illustrates thatthe robust adaptive filter has stronger ability to adapt to theinterference or uncertainty
5 Conclusions
In this paper a robust adaptive Kalman filtering algorithmis proposed aiming to investigate the influence of the orbitdetermination errors on the attitude determination This
6 Abstract and Applied Analysis
0 5000 10000minus06
minus04
minus02
0
02
04
Orb
ital i
nclin
atio
n er
ror (
deg)
Time (s)
(a)
0 5000 10000minus10
minus5
0
5
Time (s)
RAA
N (d
eg)
times10minus3
(b)
0 5000 10000minus2
minus1
0
1
2
True
anom
aly
erro
r (de
g)
Time (s)
(c)
0 5000 10000minus2
minus1
0
1
2
Time (s)
Arg
umen
t of p
eria
psis
erro
r (de
g)
(d)
Figure 3 Orbital elements estimation errors
7000 7500 8000 8500 9000 9500 100000
005
01
015
02
025
03
035
04
045
05
EKFRAEKF
Time (s)
Attit
ude e
stim
atio
n er
rors
(deg
)
Figure 4 Attitude estimation errors RSS
Abstract and Applied Analysis 7
algorithm not only adaptively adjusts the covariance of theobservation noise but also adjusts the covariance matrix ofone-step prediction using the adaptive factor which changesthe weight of old data and observation information in thefilter getting a more appropriate Kalman gain The noisevariance inflation factor based on Huber weight functionand adaptive factor based on the innovation proposed inthis paper ensure the approximate optimal of filtering resultsBy taking attitude determination of small satellite withmagnetometer and gyro combination as an example a seriesof mathematical simulations are carried outThe results showthat the proposed robust adaptive filtering algorithm canbetter cope with the interference of noise and uncertaintyof system model parameter which provide a higher accuracyof attitude determination results under the premise of errorsexisting in orbit parameters determination
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] J Cote and J De Lafontaine ldquoMagnetic-only orbit and attitudeestimation using the Square-Root Unscented Kalman Filterapplication to the PROBA-2 spacecraftrdquo in Proceedings ofthe AIAA Guidance Navigation and Control Conference andExhibit Honolulu Hawaii USA August 2008
[2] M L Psiaki L Huang and S M Fox ldquoGround tests ofmagnetometer-based autonomous navigation (MAGNAV) forlow-earth-orbiting spacecraftrdquo Journal of Guidance Controland Dynamics vol 16 no 1 pp 206ndash214 1993
[3] M Wiegand ldquoAutonomous satellite navigation via Kalmanfiltering of magnetometer datardquo Acta Astronautica vol 38 no4-8 pp 395ndash403 1996
[4] H Jung and M L Psiaki ldquoTests of magnetometersun-sensororbit determination using flight datardquo Journal of GuidanceControl and Dynamics vol 25 no 3 pp 582ndash590 2002
[5] J K Thienel R R Harman I Y Bar-Itzhack and M Lam-bertson ldquoResults of the magnetometer navigation (MAGNAV)inflight experimentrdquo in Proceedings of the AIAAAAS Astrody-namics Specialist Conference and Exhibit pp 206ndash222 Provi-dence RI USA August 2004
[6] P Tortora Y Oshman and F Santoni ldquoSpacecraft angular rateestimation from magnetometer data only using an analyticpredictorrdquo Journal of Guidance Control and Dynamics vol 27no 3 pp 365ndash373 2004
[7] W Ding J Wang C Rizos and D Kinlyside ldquoImprovingadaptive kalman estimation in GPSINS integrationrdquo Journal ofNavigation vol 60 no 3 pp 517ndash529 2007
[8] S Gao Y Zhong and W Li ldquoRobust adaptive filtering methodfor SINSSAR integrated navigation systemrdquo Aerospace Scienceand Technology vol 15 no 6 pp 425ndash430 2011
[9] H Zhang Y Shi and J Wang ldquoOn energy-to-peak filtering fornonuniformly sampled nonlinear systems a Markovian jumpsystem approachrdquo IEEE Transactions on Fuzzy Systems vol 22no 1 pp 212ndash222 2013
[10] H Zhang Y Shi and A Saadat Mehr ldquoRobust energy-to-peakfiltering for networked systems with time-varying delays and
randomlymissing datardquo IET ControlTheoryampApplications vol4 no 12 pp 2921ndash2936 2010
[11] H Zhang A S Mehr and Y Shi ldquoImproved robust energy-to-peak filtering for uncertain linear systemsrdquo Signal Processingvol 90 no 9 pp 2667ndash2675 2010
[12] H Zhang and Y Shi ldquoParameter-dependent 119867infin
filteringfor linear time-varying systemsrdquo Journal of Dynamic SystemsMeasurement and Control vol 135 no 2 Article ID 0210062013
[13] H Gao J Lam and C Wang ldquoMixed 119867
2119867
infinfiltering for
continuous-time polytopic systems a parameter-dependentapproachrdquo Circuits Systems and Signal Processing vol 24 no6 pp 689ndash702 2005
[14] H Zhang Y Shi and A Saadat Mehr ldquoOn 119867
infinfiltering for
discrete-time takagi-sugeno fuzzy systemsrdquo IEEE Transactionson Fuzzy Systems vol 20 no 2 pp 396ndash401 2012
[15] J Zarei M A Tajeddini and H R Karimi ldquoVibration analysisfor bearing fault detection and classification using an intelligentfilterrdquoMechatronics vol 24 pp 151ndash157 2014
[16] Y Wei J Qiu H Reza Karimi et al ldquoA new design of 119867infin
filtering for continuous-time Markovian jump systems withtime-varying delay and partially accessible mode informationrdquoSignal Processing vol 93 no 9 pp 2392ndash2407 2013
[17] M Basin J J Maldonado and H R Karimi ldquoMean-squarefiltering for polynomial system states confused with poissonnoises over polynomial observationsrdquo Modeling Identificationand Control vol 32 no 2 pp 47ndash55 2011
[18] H R Karimi ldquoRobust delay-dependent 119867infin
control of uncer-tain time-delay systems with mixed neutral discrete anddistributed time-delays and Markovian switching parametersrdquoIEEE Transactions on Circuits and Systems I Regular Papersvol 58 no 8 pp 1910ndash1923 2011
[19] H E Soken and C Hajiyev ldquoPico satellite attitude estimationvia Robust Unscented Kalman Filter in the presence of mea-surement faultsrdquo ISA Transactions vol 49 no 3 pp 249ndash2562010
[20] C Hide T Moore and M Smith ldquoAdaptive Kalman filteringalgorithms for integratingGPS and low cost INSrdquo inProceedingsof the Position Location and Navigation Symposium (PLANSrsquo04) pp 227ndash233 April 2004
[21] CHajiyev ldquoAdaptive filtration algorithmwith the filter gain cor-rection applied to integrated INSradar altimeterrdquo Proceedingsof the Institution ofMechanical Engineers G Journal of AerospaceEngineering vol 221 no 5 pp 847ndash855 2007
[22] S C Douglas ldquoIntroduction to adaptive filtersrdquo inDigital SignalProcessing Fundamentals V KMadisetti Ed pp 1ndash18 Taylor ampFrancis Boca Raton Fla USA 2010
[23] KHKim JG Lee andCG Park ldquoAdaptive two-stageKalmanfilter in the presence of unknown random biasrdquo InternationalJournal of Adaptive Control and Signal Processing vol 20 no 7pp 305ndash319 2006
[24] Y Yang L Song and T Xu ldquoNew robust estimator for theadjustment of correlated GPS networksrdquo in Proceedings of the1st International Symposium on Robust Statistics and FuzzyTechniques inGeodesy andGIS A Carosio andHKutterer EdsNo 195 pp 199ndash208 IGP-Bericht 2001
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 Abstract and Applied Analysis
noise But in practice due to the complex surroundings thecharacteristics of the noise are very difficult to get accurately[7] Traditional EKF does not have the adjust ability fornoise and is not sensitive to uncertainty of model parameterswhich directly affects the estimation performance of EKF Inorder to solve these problems the traditional EKF needs to beimproved A feasible method is to use adaptive Kalman filter-ing It can estimate online the statistical characteristic of thenoise in real time so as to adjust the filter parameter [8]Manyresults on estimation and adaptive filtering design for dif-ferent kinds of dynamic systems have been obtained [9ndash18]Adaptive filtering can be divided into three basic types mul-timode self-adaptive filtering self-adaptive filtering based onthe innovation and adaptive filtering based on the residual[19] Multimode adaptive filtering requires multiple filtersthey are calculated in parallel according to the differentmodel This method is not only complex but also with heavycomputing burdens [20] In the self-adaptive filter basedon innovation or residual covariance matrix could adjustadaptively according to the innovation or residual sequencethrough fuzzy logic control But the fuzzy rules are oftenestablished based on peoplersquos experience [21 22] The otherfeasible method is adaptive fading Kalman filter It uses asuboptimal fading factor to enhance the impact of innovationsequence but filtering accuracy will be reduced [23]
For the attitude determination problem considered inthis paper there is still some limitations by using the aboveimproved EKF method singly So on the basis of the aboveresearch a robust adaptive Kalman filtering has been raisedin this paper It combines the robust filtering methods andadaptive filtering By adjusting the observation noise and thesystem covariance matrix it changes the weights of originaldata and observation information in the filter and then getsmore reasonable filter gain and effectively improves attitudedetermination accuracy which provide a feasible way forsmall satellite autonomous navigation problem based on low-cost sensors
2 Problem Description
For the satellite orbit and attitude determination problembased on magnetometer and gyro a sequential scheme isadopted in which the determination of orbit and attitude areconsidered as two independent stages In the stage of estimat-ing orbit states xorb in order to avoid the influence of satelliteattitude EKF is taken to determine the orbit parameters bytaking the modulus of geomagnetic field vector measuredby magnetometer as observation In attitude determinationstage filtering algorithm is adopted to estimate attitude usingthe estimated orbital parameters and geomagnetic field vec-tor as well as gyro measurement see Figure 1 Orbit estima-tion stage will not be studied in this paper because there havebeen a lot of research results about it see [3] By the reasonof taking the sequential orbit and attitude determinationscheme the attitude determination is not only affected by theprecision of sensor precision but also affected by the precisionof orbit estimation Focusing on the attitude determinationstage a satellite attitude determination algorithm which caninhibit the influence of orbit errors is put forward
Orbitfilter
Attitudefilter
z = |Bb|
z = Bb
x orb
x orbx att
u
Figure 1 Sequential orbit and attitude determination scheme
Satellite attitude kinematics equation can be described as
q = 1
2
Ω (120596bo) q (1)
where q = [1199021 119902
2 119902
3 119902
4]
119879 represents the attitude quaternionfrom orbital coordinate system to body coordinate systemand 120596bo = [120596bo1 120596bo2 120596bo3]
119879 represents the body angularvelocity relative to orbital coordinate system And Ω(120596bo) iswritten as
Ω (120596bo) =[
[
[
[
0 120596bo3 minus120596bo2 120596bo1minus120596bo3 0 120596
1198871199001120596bo2
120596bo2 minus120596bo1 0 120596bo3minus120596bo1 minus120596bo2 minus120596bo3 0
]
]
]
]
(2)
The gyro measurement model usually takes the followingform
u = 120596 + b + 1205781 (3)
where u is the actual output value of gyro 120596 is the bodyinertial angular velocity b is the gyro constant drift and 120578
1is
the Gaussian white noise with the variance of 1205902119892
The body inertial angular velocity is calculated in (3)Consider
120596 = u minus b minus 1205781 (4)
And approximately
b = 1205782 (5)
where 1205782is drift slope white noise of gyro 120578
2sim 119873(0 120575
2
119887)
In the satellite attitude kinematics equation the bodyangular velocity relative to orbital coordinate system can becalculated by the following equation
120596bo = 120596 minus C (q)120596119900 (6)
whereC(q) is the attitude transformationmatrix from orbitalcoordinate system to body coordinate system and 120596
119900repre-
sents the orbit angular velocity which can be obtained fromorbit parameters
When determining the attitude taking three-axis mag-netic field vector measured by magnetometer as observationthe observation equation is
B119887= h (xorb q) + v
119861= C (q)B
119900(xorb) + v
119861 (7)
Abstract and Applied Analysis 3
where B119887represents the actual measured value of magne-
tometer and B119900(xorb) is the magnetic field vector in the
orbital coordinate system which can be calculated by IGRFv119861represents magnetometer measurement errors which is
Gaussian white noiseIt is can be seen from (6) and (7) that both the system
state equation and observation equation are functions of orbitparameters in the process of attitude determination But thereal value of orbit parameters cannot be gotten so we canonly use the result of orbit filter to replace them So addi-tional errors were introduced for the system Therefore thetraditional Kalman filter will not be able to obtain the optimalresults of altitude determination The errors that occurredin this part can be considered as parameter uncertainty Thepurpose of this paper is to design a robust adaptive filter tocope with the attitude determination problem caused by theuncertainty of orbital parameters and improve the accuracyof attitude determination
3 Robust Adaptive Filtering Algorithm forAttitude Determination
Satellite attitude determination system is a continuous non-linear system and it should be linearized and discretized forapplication of EKF filtering For convenience of derivationrobust adaptive filter for linear discrete system is firstly con-sidered in this section and then it is extended to nonlinearcontinuous system
31 The Design of Robust Adaptive Filter Consider the lineardiscrete system
x119896= Φ119896minus1
x119896minus1
+ w119896minus1 (8a)
z119896= H119896x119896+ v119896 (8b)
where x119896represents 119899 times 1 state vector z
119896represents 119898 times 1
observation vector and Φ119896minus1
and H119896are the state transition
matrix and the observationmatrix respectivelyw119896and v119896are
the process noise and observation noise with average of 0 andvariance ofQ and R respectively
In the process of filtering state one-step prediction can beexpressed as
x119896(minus) = Φ
119896minus1x119896minus1 (9)
and the covariance of one-step prediction error is
P119896(minus) = Φ
119896minus1P119896minus1Φ119879
119896minus1+Q119896minus1 (10)
The prediction state residual vector and themeasurementresidual vector can be defined as (11) respectively
v119909119896(minus)
= x119896(+) minus x
119896(minus) = x
119896(+) minusΦ
119896minus1x119896minus1
(+)
v119896= H119896x119896(+) minus z
119896
(11)
According to rule of robustness build the followingextreme function based on residual equation (11)
Ω119896= v119879119896Rminus1119896v119896+ 120572
119896v119879119909119896(minus)
Pminus1119896(minus) v119909119896(minus)
minus 2120582
119879
119896(H119896x119896(+) minus z
119896minus v119896)
(12)
where R119896is the equivalent covariance matrix of 119911
119896 which is
the adaptive estimate ofmeasuring covariancematrix120572119896(0 lt
120572
119896le 1) is the adaptive factor and 120582
119896is Lagrangian multiplier
Take the partial respect of (12) to v119896and x
119896(+) respec-
tively then let them be equal to 0
120597Ω119896
120597v119896
= 2v119879119896Rminus1119896+ 2120582
119879
119896= 0
120597Ω119896
120597x119896
= 2v119879119896Rminus1119896H119896+ 2120572
119896v119879119909119896(minus)
Pminus1119896(minus) minus 2120582
119879
119896H119896= 0
(13)
According to (13) it is can be deduced that
2H119879119896Rminus1119896v119896+ 120572
119896Pminus119879119896(minus) v119909119896(minus)
= 0(14)
Substituting (11) in (14) we obtain
2H119879119896Rminus1119896(H119896x119896(+) minus z
119896) + 120572
119896Pminus119879119896(minus) (x
119896(+) minus x
119896(minus)) = 0
(15)
From (15) we have
x119896(+) = (H119879
119896Rminus1119896H119896+
120572
119896
2
Pminus1119896(minus))
minus1
times (H119879119896Rminus1119896z119896+
120572
119896
2
Pminus1119896(minus) x119896(minus))
(16)
Let
K119896= (H119879119896Rminus1119896H119896+
120572
119896
2
Pminus1119896(minus))
minus1
H119879119896Rminus1119896
(17)
Then (16) can be written as
x119896(+) = K
119896[z119896+ (Kminus1119896minusH119896) x119896(minus)] (18)
Further we can write (17) as
K119896=
1
120572
119896
P119896(minus)H119879119896(
1
120572
119896
H119896P119896(minus)H119879119896+ R119896)
minus1
(19)
So the robust adaptive filtering algorithm for lineardiscrete system can be described as
x119896(minus) = Φ
119896minus1x119896minus1 (20a)
P119896(minus) =
1
120572
119896
(Φ119896minus1
P119896minus1
(+)Φ119879
119896minus1+Q119896) (20b)
K119896= P119896(minus)H119879119896(H119896P119896(minus)H119879119896+ R119896)
minus1
(20c)
x119896(+) = K
119896[z119896+ (Kminus1119896minusH119896) x119896(minus)]
= x119896(minus) + K
119896(z119896minusH119896x119896(minus))
(20d)
P119896(+) = (I minus K
119896H119896)P119896(minus) (20e)
4 Abstract and Applied Analysis
32 The Equivalent Covariance Matrix R119896of Observation
Vector z119896 From [24] the equivalent covariance matrix can
be obtained from bifactor variance expanding model whoseelement is
120590
119896119894119895=radic120582
119894radic120582
119895120590
119896119894119895
(21)
where 120590119896119894119895
is the corresponding element of prior variancecovariance and R
119896 120582119894 and 120582
119895are variance inflation factors
which can be taken as the reciprocal of Huber weightfunction that is
120582
119894119894=
1
1003816
1003816
1003816
1003816
V119894
1003816
1003816
1003816
1003816
=
1003816
1003816
1003816
1003816
1003816
1003816
1003816
1003816
1003816
V119894
120590V119894
1003816
1003816
1003816
1003816
1003816
1003816
1003816
1003816
1003816
le 119888
1003816
1003816
1003816
1003816
V119894
1003816
1003816
1003816
1003816
119888
1003816
1003816
1003816
1003816
V119894
1003816
1003816
1003816
1003816
ge 119888
(22)
where 119888 is constant and 119888 = 10 sim 15 V119894is standard-
ized residual Therefore the observation covariance matrixinflates when the observed error exceeds a certain rangeOtherwise the prior variance remains unchanged
33 The Selection of Adaptive Factor 120572119896 Because the innova-
tion vector can reflect the errors of the system we considersolving the adaptive factor by using innovation
In the process of filtering the innovation sequence can bedescribed as
vinn119896 = z119896minusH119896x119896(minus) (23)
and its theoretical covariance matrix is
Pinn119896 = H119896P119896(minus)H119879119896+ R119896 (24)
It can be seen from (20a)ndash(20e) in robust adaptivefiltering innovation covariance is adjusted to
Pinn119896 =1
120572
119896
H119896P119896(minus)H119879119896+ R119896 (25)
Considering that Pinn119896 represent actual innovationcovariance matrix the optimal adaptive factor 120572
119896based on
innovation covariance satisfies
Pinn119896 = Pinn119896 (26)
That is
Pinn119896 =1
120572
119896
H119896P119896(minus)H119879119896+ R119896 (27)
From (27) we obtain
120572
119896(
Pinn119896 minus R119896) = H
119896P119896(minus)H119879119896 (28)
Substituting (24) in (28) we have
120572
119896(
Pinn119896 minus R119896) = Pinn119896 minus R
119896 (29)
So the optimal adaptive factor could be expressed as
120572
119896=
tr (Pinn119896 minus R119896)
tr (Pinn119896 minus R119896)
(30)
As the value range of adaptive factor 120572119896is (0 1]
120572
119896=
1 tr (Pinn119896) ge tr (Pinn119896)
tr (Pinn119896 minus R119896)
tr (Pinn119896 minus R119896)
tr (Pinn119896) lt tr (Pinn119896) (31)
where tr(sdot) is trace of matrix By omitting the same items in(31) an approximate optimal adaptive factor can be obtained
120572
119896=
1 tr (Pinn119896) ge tr (Pinn119896)
tr (Pinn119896)
tr (Pinn119896)tr (Pinn119896) lt tr (Pinn119896)
(32)
Using the innovation vector of current sampling time todescribe the real covariance we have
Pinn119896 = Vinn119896V119879
inn119896 (33)
Consider
tr (Pinn119896) = V119879inn119896Vinn119896 (34)
The approximate optimal adaptive factor can be describedas
120572
119896=
1 tr (Pinn119896) ge tr (Pinn119896)
tr (Pinn119896)
V119879inn119896Vinn119896tr (Pinn119896) lt tr (Pinn119896)
(35)
Compared with the standard EKF the robust adaptivefiltering only adds a judgment process of two scalar factors inthe loop of each step the complexity and calculated quantityof which will not be increased substantially When the vari-ance inflation factor120582
119894119894= 1 thismeans that themeasurement
noise is the same as the original statistical characteristic therobust adaptive filtering degenerate into adaptive filteringWhen the adaptive factor 120572
119896= 1 it degenerates into robust
filtering When 120582
119894119894= 1 and 120572
119896= 1 it is the traditional
Kalman filtering So the robust adaptive filtering is stillKalman filtering substantially which is capable of adapting tothe influence of uncertain factors by adjusting the parametersproperly and can realize the states estimate in the conditionof uncertain factors
For nonlinear continuous system
x = 119891 (x) + w (36a)
z = ℎ (x) + v (36b)
Abstract and Applied Analysis 5
By Taylor series expansion and discretization we obtain arobust adaptive filtering algorithm for nonlinear continuoussystem Consider
x119896(minus) = int
119896Δ119905
(119896minus1)Δ119905
119891 (x119896minus1
(+)) 119889119905(37a)
P119896(minus) =
1
120572
119896
(Φ119896minus1
P119896minus1
(+)Φ119879
119896minus1+Q119896) (37b)
K119896= P119896(minus)H119879119896(H119896P119896(minus)H119879119896+ R119896)
minus1 (37c)
x119896(+) = x
119896(minus) + K
119896(z119896minus ℎ (x
119896(minus))) (37d)
P119896(+) = (I minus K
119896H119896)P119896(minus) (37e)
where Φ119896= 119868 + (120597119891(119909)120597119909)|x=x119896(minus) sdot Δ119905 H119896 = (120597ℎ(119909)
120597119909)|x=x119896(minus) and Δ119905 are sampling time steps
4 Mathematical Simulation and Analysis
In this section the performance of the robust adaptivefiltering is verified by mathematical simulation
In the simulation the real parameters ofmicrosatellite aregiven as below
The moment of inertia of satellite is
J = [[
181 04 minus048
04 163 minus461
minus048 minus461 1795
]
]
kgm2 (38)
The initial position and velocity of satellite are
r0= [516306203 427599216 minus856]
119879m
v0= [minus32881720 39649749 52634825]
119879ms(39)
The initial attitude quaternion and angular velocity are
q0= [0 0 0 1]
119879
1205960= [0 0 0]
119879 rads(40)
The measurement accuracy of magnetometer is 100 nTthe constant drift of gyro is 3 degh the measurementaccuracy of it is 01 radh the sampling period is 1 s and thesimulation time is 10000 s
For the determination of orbit taking the earth magneticfield as measurement information and using the standardEKF algorithm for estimation the initial simulation parame-ters are set as follows and the simulation results are shown inFigure 2 to Figure 3
r0= [516406203 427699216 1000]
119879m
v0= [minus31881720 38649749 51634825]
119879ms
Q0= diag ([1 1 1 1 1 1] lowast 1119890 minus 8)
P0= diag ([1000 1000 1000 100 100 100]2)
(41)
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000minus3
minus25
minus2
minus15
minus1
minus05
0
05
1
15
Posit
ion
estim
atio
n er
rors
(m)
Time (s)
times104
Figure 2 Position estimation errors
After determining the satellite orbit parameters takingthe estimated results as the input of the attitude determinesystem attitude robust adaptive filtering algorithm is adoptedto determine the attitude and simulation initial parameters asfollows and the simulation results are shown in Figure 4
q0= [00523 minus00474 00523 09961]
119879
b0= [35 35 35]
119879 deg h
Q0= diag ([1 1 1 1 1 1] lowast 1119890 minus 10)
P0= diag ( [00474 00523 00474 024119890 minus 5
024119890 minus 5 024119890 minus 5]
2)
(42)
Figure 2 shows the three-axis position estimation errorsby taking the magnitude of the geomagnetic field as observa-tion Figure 3 shows the estimation errors of correspondingorbital elements As seen from the figures when the positionerror is 1000meters the effect of the errors cannot be ignoredfor both attitude kinematics equation and the observationequation Figure 4 shows the attitude estimation errors basedon traditional EKF and robust adaptive filter It is can be seenfrom Figure 4 The estimation precision of the traditionalEKF is about 02 degrees and the maximum estimate error ofthe robust adaptive filter proposed in this paper is 01 degreesthe accuracy has improved significantly Furthermore theoscillation of robust adaptive filter estimation results issmaller and the curve is smoother it also illustrates thatthe robust adaptive filter has stronger ability to adapt to theinterference or uncertainty
5 Conclusions
In this paper a robust adaptive Kalman filtering algorithmis proposed aiming to investigate the influence of the orbitdetermination errors on the attitude determination This
6 Abstract and Applied Analysis
0 5000 10000minus06
minus04
minus02
0
02
04
Orb
ital i
nclin
atio
n er
ror (
deg)
Time (s)
(a)
0 5000 10000minus10
minus5
0
5
Time (s)
RAA
N (d
eg)
times10minus3
(b)
0 5000 10000minus2
minus1
0
1
2
True
anom
aly
erro
r (de
g)
Time (s)
(c)
0 5000 10000minus2
minus1
0
1
2
Time (s)
Arg
umen
t of p
eria
psis
erro
r (de
g)
(d)
Figure 3 Orbital elements estimation errors
7000 7500 8000 8500 9000 9500 100000
005
01
015
02
025
03
035
04
045
05
EKFRAEKF
Time (s)
Attit
ude e
stim
atio
n er
rors
(deg
)
Figure 4 Attitude estimation errors RSS
Abstract and Applied Analysis 7
algorithm not only adaptively adjusts the covariance of theobservation noise but also adjusts the covariance matrix ofone-step prediction using the adaptive factor which changesthe weight of old data and observation information in thefilter getting a more appropriate Kalman gain The noisevariance inflation factor based on Huber weight functionand adaptive factor based on the innovation proposed inthis paper ensure the approximate optimal of filtering resultsBy taking attitude determination of small satellite withmagnetometer and gyro combination as an example a seriesof mathematical simulations are carried outThe results showthat the proposed robust adaptive filtering algorithm canbetter cope with the interference of noise and uncertaintyof system model parameter which provide a higher accuracyof attitude determination results under the premise of errorsexisting in orbit parameters determination
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] J Cote and J De Lafontaine ldquoMagnetic-only orbit and attitudeestimation using the Square-Root Unscented Kalman Filterapplication to the PROBA-2 spacecraftrdquo in Proceedings ofthe AIAA Guidance Navigation and Control Conference andExhibit Honolulu Hawaii USA August 2008
[2] M L Psiaki L Huang and S M Fox ldquoGround tests ofmagnetometer-based autonomous navigation (MAGNAV) forlow-earth-orbiting spacecraftrdquo Journal of Guidance Controland Dynamics vol 16 no 1 pp 206ndash214 1993
[3] M Wiegand ldquoAutonomous satellite navigation via Kalmanfiltering of magnetometer datardquo Acta Astronautica vol 38 no4-8 pp 395ndash403 1996
[4] H Jung and M L Psiaki ldquoTests of magnetometersun-sensororbit determination using flight datardquo Journal of GuidanceControl and Dynamics vol 25 no 3 pp 582ndash590 2002
[5] J K Thienel R R Harman I Y Bar-Itzhack and M Lam-bertson ldquoResults of the magnetometer navigation (MAGNAV)inflight experimentrdquo in Proceedings of the AIAAAAS Astrody-namics Specialist Conference and Exhibit pp 206ndash222 Provi-dence RI USA August 2004
[6] P Tortora Y Oshman and F Santoni ldquoSpacecraft angular rateestimation from magnetometer data only using an analyticpredictorrdquo Journal of Guidance Control and Dynamics vol 27no 3 pp 365ndash373 2004
[7] W Ding J Wang C Rizos and D Kinlyside ldquoImprovingadaptive kalman estimation in GPSINS integrationrdquo Journal ofNavigation vol 60 no 3 pp 517ndash529 2007
[8] S Gao Y Zhong and W Li ldquoRobust adaptive filtering methodfor SINSSAR integrated navigation systemrdquo Aerospace Scienceand Technology vol 15 no 6 pp 425ndash430 2011
[9] H Zhang Y Shi and J Wang ldquoOn energy-to-peak filtering fornonuniformly sampled nonlinear systems a Markovian jumpsystem approachrdquo IEEE Transactions on Fuzzy Systems vol 22no 1 pp 212ndash222 2013
[10] H Zhang Y Shi and A Saadat Mehr ldquoRobust energy-to-peakfiltering for networked systems with time-varying delays and
randomlymissing datardquo IET ControlTheoryampApplications vol4 no 12 pp 2921ndash2936 2010
[11] H Zhang A S Mehr and Y Shi ldquoImproved robust energy-to-peak filtering for uncertain linear systemsrdquo Signal Processingvol 90 no 9 pp 2667ndash2675 2010
[12] H Zhang and Y Shi ldquoParameter-dependent 119867infin
filteringfor linear time-varying systemsrdquo Journal of Dynamic SystemsMeasurement and Control vol 135 no 2 Article ID 0210062013
[13] H Gao J Lam and C Wang ldquoMixed 119867
2119867
infinfiltering for
continuous-time polytopic systems a parameter-dependentapproachrdquo Circuits Systems and Signal Processing vol 24 no6 pp 689ndash702 2005
[14] H Zhang Y Shi and A Saadat Mehr ldquoOn 119867
infinfiltering for
discrete-time takagi-sugeno fuzzy systemsrdquo IEEE Transactionson Fuzzy Systems vol 20 no 2 pp 396ndash401 2012
[15] J Zarei M A Tajeddini and H R Karimi ldquoVibration analysisfor bearing fault detection and classification using an intelligentfilterrdquoMechatronics vol 24 pp 151ndash157 2014
[16] Y Wei J Qiu H Reza Karimi et al ldquoA new design of 119867infin
filtering for continuous-time Markovian jump systems withtime-varying delay and partially accessible mode informationrdquoSignal Processing vol 93 no 9 pp 2392ndash2407 2013
[17] M Basin J J Maldonado and H R Karimi ldquoMean-squarefiltering for polynomial system states confused with poissonnoises over polynomial observationsrdquo Modeling Identificationand Control vol 32 no 2 pp 47ndash55 2011
[18] H R Karimi ldquoRobust delay-dependent 119867infin
control of uncer-tain time-delay systems with mixed neutral discrete anddistributed time-delays and Markovian switching parametersrdquoIEEE Transactions on Circuits and Systems I Regular Papersvol 58 no 8 pp 1910ndash1923 2011
[19] H E Soken and C Hajiyev ldquoPico satellite attitude estimationvia Robust Unscented Kalman Filter in the presence of mea-surement faultsrdquo ISA Transactions vol 49 no 3 pp 249ndash2562010
[20] C Hide T Moore and M Smith ldquoAdaptive Kalman filteringalgorithms for integratingGPS and low cost INSrdquo inProceedingsof the Position Location and Navigation Symposium (PLANSrsquo04) pp 227ndash233 April 2004
[21] CHajiyev ldquoAdaptive filtration algorithmwith the filter gain cor-rection applied to integrated INSradar altimeterrdquo Proceedingsof the Institution ofMechanical Engineers G Journal of AerospaceEngineering vol 221 no 5 pp 847ndash855 2007
[22] S C Douglas ldquoIntroduction to adaptive filtersrdquo inDigital SignalProcessing Fundamentals V KMadisetti Ed pp 1ndash18 Taylor ampFrancis Boca Raton Fla USA 2010
[23] KHKim JG Lee andCG Park ldquoAdaptive two-stageKalmanfilter in the presence of unknown random biasrdquo InternationalJournal of Adaptive Control and Signal Processing vol 20 no 7pp 305ndash319 2006
[24] Y Yang L Song and T Xu ldquoNew robust estimator for theadjustment of correlated GPS networksrdquo in Proceedings of the1st International Symposium on Robust Statistics and FuzzyTechniques inGeodesy andGIS A Carosio andHKutterer EdsNo 195 pp 199ndash208 IGP-Bericht 2001
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Abstract and Applied Analysis 3
where B119887represents the actual measured value of magne-
tometer and B119900(xorb) is the magnetic field vector in the
orbital coordinate system which can be calculated by IGRFv119861represents magnetometer measurement errors which is
Gaussian white noiseIt is can be seen from (6) and (7) that both the system
state equation and observation equation are functions of orbitparameters in the process of attitude determination But thereal value of orbit parameters cannot be gotten so we canonly use the result of orbit filter to replace them So addi-tional errors were introduced for the system Therefore thetraditional Kalman filter will not be able to obtain the optimalresults of altitude determination The errors that occurredin this part can be considered as parameter uncertainty Thepurpose of this paper is to design a robust adaptive filter tocope with the attitude determination problem caused by theuncertainty of orbital parameters and improve the accuracyof attitude determination
3 Robust Adaptive Filtering Algorithm forAttitude Determination
Satellite attitude determination system is a continuous non-linear system and it should be linearized and discretized forapplication of EKF filtering For convenience of derivationrobust adaptive filter for linear discrete system is firstly con-sidered in this section and then it is extended to nonlinearcontinuous system
31 The Design of Robust Adaptive Filter Consider the lineardiscrete system
x119896= Φ119896minus1
x119896minus1
+ w119896minus1 (8a)
z119896= H119896x119896+ v119896 (8b)
where x119896represents 119899 times 1 state vector z
119896represents 119898 times 1
observation vector and Φ119896minus1
and H119896are the state transition
matrix and the observationmatrix respectivelyw119896and v119896are
the process noise and observation noise with average of 0 andvariance ofQ and R respectively
In the process of filtering state one-step prediction can beexpressed as
x119896(minus) = Φ
119896minus1x119896minus1 (9)
and the covariance of one-step prediction error is
P119896(minus) = Φ
119896minus1P119896minus1Φ119879
119896minus1+Q119896minus1 (10)
The prediction state residual vector and themeasurementresidual vector can be defined as (11) respectively
v119909119896(minus)
= x119896(+) minus x
119896(minus) = x
119896(+) minusΦ
119896minus1x119896minus1
(+)
v119896= H119896x119896(+) minus z
119896
(11)
According to rule of robustness build the followingextreme function based on residual equation (11)
Ω119896= v119879119896Rminus1119896v119896+ 120572
119896v119879119909119896(minus)
Pminus1119896(minus) v119909119896(minus)
minus 2120582
119879
119896(H119896x119896(+) minus z
119896minus v119896)
(12)
where R119896is the equivalent covariance matrix of 119911
119896 which is
the adaptive estimate ofmeasuring covariancematrix120572119896(0 lt
120572
119896le 1) is the adaptive factor and 120582
119896is Lagrangian multiplier
Take the partial respect of (12) to v119896and x
119896(+) respec-
tively then let them be equal to 0
120597Ω119896
120597v119896
= 2v119879119896Rminus1119896+ 2120582
119879
119896= 0
120597Ω119896
120597x119896
= 2v119879119896Rminus1119896H119896+ 2120572
119896v119879119909119896(minus)
Pminus1119896(minus) minus 2120582
119879
119896H119896= 0
(13)
According to (13) it is can be deduced that
2H119879119896Rminus1119896v119896+ 120572
119896Pminus119879119896(minus) v119909119896(minus)
= 0(14)
Substituting (11) in (14) we obtain
2H119879119896Rminus1119896(H119896x119896(+) minus z
119896) + 120572
119896Pminus119879119896(minus) (x
119896(+) minus x
119896(minus)) = 0
(15)
From (15) we have
x119896(+) = (H119879
119896Rminus1119896H119896+
120572
119896
2
Pminus1119896(minus))
minus1
times (H119879119896Rminus1119896z119896+
120572
119896
2
Pminus1119896(minus) x119896(minus))
(16)
Let
K119896= (H119879119896Rminus1119896H119896+
120572
119896
2
Pminus1119896(minus))
minus1
H119879119896Rminus1119896
(17)
Then (16) can be written as
x119896(+) = K
119896[z119896+ (Kminus1119896minusH119896) x119896(minus)] (18)
Further we can write (17) as
K119896=
1
120572
119896
P119896(minus)H119879119896(
1
120572
119896
H119896P119896(minus)H119879119896+ R119896)
minus1
(19)
So the robust adaptive filtering algorithm for lineardiscrete system can be described as
x119896(minus) = Φ
119896minus1x119896minus1 (20a)
P119896(minus) =
1
120572
119896
(Φ119896minus1
P119896minus1
(+)Φ119879
119896minus1+Q119896) (20b)
K119896= P119896(minus)H119879119896(H119896P119896(minus)H119879119896+ R119896)
minus1
(20c)
x119896(+) = K
119896[z119896+ (Kminus1119896minusH119896) x119896(minus)]
= x119896(minus) + K
119896(z119896minusH119896x119896(minus))
(20d)
P119896(+) = (I minus K
119896H119896)P119896(minus) (20e)
4 Abstract and Applied Analysis
32 The Equivalent Covariance Matrix R119896of Observation
Vector z119896 From [24] the equivalent covariance matrix can
be obtained from bifactor variance expanding model whoseelement is
120590
119896119894119895=radic120582
119894radic120582
119895120590
119896119894119895
(21)
where 120590119896119894119895
is the corresponding element of prior variancecovariance and R
119896 120582119894 and 120582
119895are variance inflation factors
which can be taken as the reciprocal of Huber weightfunction that is
120582
119894119894=
1
1003816
1003816
1003816
1003816
V119894
1003816
1003816
1003816
1003816
=
1003816
1003816
1003816
1003816
1003816
1003816
1003816
1003816
1003816
V119894
120590V119894
1003816
1003816
1003816
1003816
1003816
1003816
1003816
1003816
1003816
le 119888
1003816
1003816
1003816
1003816
V119894
1003816
1003816
1003816
1003816
119888
1003816
1003816
1003816
1003816
V119894
1003816
1003816
1003816
1003816
ge 119888
(22)
where 119888 is constant and 119888 = 10 sim 15 V119894is standard-
ized residual Therefore the observation covariance matrixinflates when the observed error exceeds a certain rangeOtherwise the prior variance remains unchanged
33 The Selection of Adaptive Factor 120572119896 Because the innova-
tion vector can reflect the errors of the system we considersolving the adaptive factor by using innovation
In the process of filtering the innovation sequence can bedescribed as
vinn119896 = z119896minusH119896x119896(minus) (23)
and its theoretical covariance matrix is
Pinn119896 = H119896P119896(minus)H119879119896+ R119896 (24)
It can be seen from (20a)ndash(20e) in robust adaptivefiltering innovation covariance is adjusted to
Pinn119896 =1
120572
119896
H119896P119896(minus)H119879119896+ R119896 (25)
Considering that Pinn119896 represent actual innovationcovariance matrix the optimal adaptive factor 120572
119896based on
innovation covariance satisfies
Pinn119896 = Pinn119896 (26)
That is
Pinn119896 =1
120572
119896
H119896P119896(minus)H119879119896+ R119896 (27)
From (27) we obtain
120572
119896(
Pinn119896 minus R119896) = H
119896P119896(minus)H119879119896 (28)
Substituting (24) in (28) we have
120572
119896(
Pinn119896 minus R119896) = Pinn119896 minus R
119896 (29)
So the optimal adaptive factor could be expressed as
120572
119896=
tr (Pinn119896 minus R119896)
tr (Pinn119896 minus R119896)
(30)
As the value range of adaptive factor 120572119896is (0 1]
120572
119896=
1 tr (Pinn119896) ge tr (Pinn119896)
tr (Pinn119896 minus R119896)
tr (Pinn119896 minus R119896)
tr (Pinn119896) lt tr (Pinn119896) (31)
where tr(sdot) is trace of matrix By omitting the same items in(31) an approximate optimal adaptive factor can be obtained
120572
119896=
1 tr (Pinn119896) ge tr (Pinn119896)
tr (Pinn119896)
tr (Pinn119896)tr (Pinn119896) lt tr (Pinn119896)
(32)
Using the innovation vector of current sampling time todescribe the real covariance we have
Pinn119896 = Vinn119896V119879
inn119896 (33)
Consider
tr (Pinn119896) = V119879inn119896Vinn119896 (34)
The approximate optimal adaptive factor can be describedas
120572
119896=
1 tr (Pinn119896) ge tr (Pinn119896)
tr (Pinn119896)
V119879inn119896Vinn119896tr (Pinn119896) lt tr (Pinn119896)
(35)
Compared with the standard EKF the robust adaptivefiltering only adds a judgment process of two scalar factors inthe loop of each step the complexity and calculated quantityof which will not be increased substantially When the vari-ance inflation factor120582
119894119894= 1 thismeans that themeasurement
noise is the same as the original statistical characteristic therobust adaptive filtering degenerate into adaptive filteringWhen the adaptive factor 120572
119896= 1 it degenerates into robust
filtering When 120582
119894119894= 1 and 120572
119896= 1 it is the traditional
Kalman filtering So the robust adaptive filtering is stillKalman filtering substantially which is capable of adapting tothe influence of uncertain factors by adjusting the parametersproperly and can realize the states estimate in the conditionof uncertain factors
For nonlinear continuous system
x = 119891 (x) + w (36a)
z = ℎ (x) + v (36b)
Abstract and Applied Analysis 5
By Taylor series expansion and discretization we obtain arobust adaptive filtering algorithm for nonlinear continuoussystem Consider
x119896(minus) = int
119896Δ119905
(119896minus1)Δ119905
119891 (x119896minus1
(+)) 119889119905(37a)
P119896(minus) =
1
120572
119896
(Φ119896minus1
P119896minus1
(+)Φ119879
119896minus1+Q119896) (37b)
K119896= P119896(minus)H119879119896(H119896P119896(minus)H119879119896+ R119896)
minus1 (37c)
x119896(+) = x
119896(minus) + K
119896(z119896minus ℎ (x
119896(minus))) (37d)
P119896(+) = (I minus K
119896H119896)P119896(minus) (37e)
where Φ119896= 119868 + (120597119891(119909)120597119909)|x=x119896(minus) sdot Δ119905 H119896 = (120597ℎ(119909)
120597119909)|x=x119896(minus) and Δ119905 are sampling time steps
4 Mathematical Simulation and Analysis
In this section the performance of the robust adaptivefiltering is verified by mathematical simulation
In the simulation the real parameters ofmicrosatellite aregiven as below
The moment of inertia of satellite is
J = [[
181 04 minus048
04 163 minus461
minus048 minus461 1795
]
]
kgm2 (38)
The initial position and velocity of satellite are
r0= [516306203 427599216 minus856]
119879m
v0= [minus32881720 39649749 52634825]
119879ms(39)
The initial attitude quaternion and angular velocity are
q0= [0 0 0 1]
119879
1205960= [0 0 0]
119879 rads(40)
The measurement accuracy of magnetometer is 100 nTthe constant drift of gyro is 3 degh the measurementaccuracy of it is 01 radh the sampling period is 1 s and thesimulation time is 10000 s
For the determination of orbit taking the earth magneticfield as measurement information and using the standardEKF algorithm for estimation the initial simulation parame-ters are set as follows and the simulation results are shown inFigure 2 to Figure 3
r0= [516406203 427699216 1000]
119879m
v0= [minus31881720 38649749 51634825]
119879ms
Q0= diag ([1 1 1 1 1 1] lowast 1119890 minus 8)
P0= diag ([1000 1000 1000 100 100 100]2)
(41)
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000minus3
minus25
minus2
minus15
minus1
minus05
0
05
1
15
Posit
ion
estim
atio
n er
rors
(m)
Time (s)
times104
Figure 2 Position estimation errors
After determining the satellite orbit parameters takingthe estimated results as the input of the attitude determinesystem attitude robust adaptive filtering algorithm is adoptedto determine the attitude and simulation initial parameters asfollows and the simulation results are shown in Figure 4
q0= [00523 minus00474 00523 09961]
119879
b0= [35 35 35]
119879 deg h
Q0= diag ([1 1 1 1 1 1] lowast 1119890 minus 10)
P0= diag ( [00474 00523 00474 024119890 minus 5
024119890 minus 5 024119890 minus 5]
2)
(42)
Figure 2 shows the three-axis position estimation errorsby taking the magnitude of the geomagnetic field as observa-tion Figure 3 shows the estimation errors of correspondingorbital elements As seen from the figures when the positionerror is 1000meters the effect of the errors cannot be ignoredfor both attitude kinematics equation and the observationequation Figure 4 shows the attitude estimation errors basedon traditional EKF and robust adaptive filter It is can be seenfrom Figure 4 The estimation precision of the traditionalEKF is about 02 degrees and the maximum estimate error ofthe robust adaptive filter proposed in this paper is 01 degreesthe accuracy has improved significantly Furthermore theoscillation of robust adaptive filter estimation results issmaller and the curve is smoother it also illustrates thatthe robust adaptive filter has stronger ability to adapt to theinterference or uncertainty
5 Conclusions
In this paper a robust adaptive Kalman filtering algorithmis proposed aiming to investigate the influence of the orbitdetermination errors on the attitude determination This
6 Abstract and Applied Analysis
0 5000 10000minus06
minus04
minus02
0
02
04
Orb
ital i
nclin
atio
n er
ror (
deg)
Time (s)
(a)
0 5000 10000minus10
minus5
0
5
Time (s)
RAA
N (d
eg)
times10minus3
(b)
0 5000 10000minus2
minus1
0
1
2
True
anom
aly
erro
r (de
g)
Time (s)
(c)
0 5000 10000minus2
minus1
0
1
2
Time (s)
Arg
umen
t of p
eria
psis
erro
r (de
g)
(d)
Figure 3 Orbital elements estimation errors
7000 7500 8000 8500 9000 9500 100000
005
01
015
02
025
03
035
04
045
05
EKFRAEKF
Time (s)
Attit
ude e
stim
atio
n er
rors
(deg
)
Figure 4 Attitude estimation errors RSS
Abstract and Applied Analysis 7
algorithm not only adaptively adjusts the covariance of theobservation noise but also adjusts the covariance matrix ofone-step prediction using the adaptive factor which changesthe weight of old data and observation information in thefilter getting a more appropriate Kalman gain The noisevariance inflation factor based on Huber weight functionand adaptive factor based on the innovation proposed inthis paper ensure the approximate optimal of filtering resultsBy taking attitude determination of small satellite withmagnetometer and gyro combination as an example a seriesof mathematical simulations are carried outThe results showthat the proposed robust adaptive filtering algorithm canbetter cope with the interference of noise and uncertaintyof system model parameter which provide a higher accuracyof attitude determination results under the premise of errorsexisting in orbit parameters determination
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] J Cote and J De Lafontaine ldquoMagnetic-only orbit and attitudeestimation using the Square-Root Unscented Kalman Filterapplication to the PROBA-2 spacecraftrdquo in Proceedings ofthe AIAA Guidance Navigation and Control Conference andExhibit Honolulu Hawaii USA August 2008
[2] M L Psiaki L Huang and S M Fox ldquoGround tests ofmagnetometer-based autonomous navigation (MAGNAV) forlow-earth-orbiting spacecraftrdquo Journal of Guidance Controland Dynamics vol 16 no 1 pp 206ndash214 1993
[3] M Wiegand ldquoAutonomous satellite navigation via Kalmanfiltering of magnetometer datardquo Acta Astronautica vol 38 no4-8 pp 395ndash403 1996
[4] H Jung and M L Psiaki ldquoTests of magnetometersun-sensororbit determination using flight datardquo Journal of GuidanceControl and Dynamics vol 25 no 3 pp 582ndash590 2002
[5] J K Thienel R R Harman I Y Bar-Itzhack and M Lam-bertson ldquoResults of the magnetometer navigation (MAGNAV)inflight experimentrdquo in Proceedings of the AIAAAAS Astrody-namics Specialist Conference and Exhibit pp 206ndash222 Provi-dence RI USA August 2004
[6] P Tortora Y Oshman and F Santoni ldquoSpacecraft angular rateestimation from magnetometer data only using an analyticpredictorrdquo Journal of Guidance Control and Dynamics vol 27no 3 pp 365ndash373 2004
[7] W Ding J Wang C Rizos and D Kinlyside ldquoImprovingadaptive kalman estimation in GPSINS integrationrdquo Journal ofNavigation vol 60 no 3 pp 517ndash529 2007
[8] S Gao Y Zhong and W Li ldquoRobust adaptive filtering methodfor SINSSAR integrated navigation systemrdquo Aerospace Scienceand Technology vol 15 no 6 pp 425ndash430 2011
[9] H Zhang Y Shi and J Wang ldquoOn energy-to-peak filtering fornonuniformly sampled nonlinear systems a Markovian jumpsystem approachrdquo IEEE Transactions on Fuzzy Systems vol 22no 1 pp 212ndash222 2013
[10] H Zhang Y Shi and A Saadat Mehr ldquoRobust energy-to-peakfiltering for networked systems with time-varying delays and
randomlymissing datardquo IET ControlTheoryampApplications vol4 no 12 pp 2921ndash2936 2010
[11] H Zhang A S Mehr and Y Shi ldquoImproved robust energy-to-peak filtering for uncertain linear systemsrdquo Signal Processingvol 90 no 9 pp 2667ndash2675 2010
[12] H Zhang and Y Shi ldquoParameter-dependent 119867infin
filteringfor linear time-varying systemsrdquo Journal of Dynamic SystemsMeasurement and Control vol 135 no 2 Article ID 0210062013
[13] H Gao J Lam and C Wang ldquoMixed 119867
2119867
infinfiltering for
continuous-time polytopic systems a parameter-dependentapproachrdquo Circuits Systems and Signal Processing vol 24 no6 pp 689ndash702 2005
[14] H Zhang Y Shi and A Saadat Mehr ldquoOn 119867
infinfiltering for
discrete-time takagi-sugeno fuzzy systemsrdquo IEEE Transactionson Fuzzy Systems vol 20 no 2 pp 396ndash401 2012
[15] J Zarei M A Tajeddini and H R Karimi ldquoVibration analysisfor bearing fault detection and classification using an intelligentfilterrdquoMechatronics vol 24 pp 151ndash157 2014
[16] Y Wei J Qiu H Reza Karimi et al ldquoA new design of 119867infin
filtering for continuous-time Markovian jump systems withtime-varying delay and partially accessible mode informationrdquoSignal Processing vol 93 no 9 pp 2392ndash2407 2013
[17] M Basin J J Maldonado and H R Karimi ldquoMean-squarefiltering for polynomial system states confused with poissonnoises over polynomial observationsrdquo Modeling Identificationand Control vol 32 no 2 pp 47ndash55 2011
[18] H R Karimi ldquoRobust delay-dependent 119867infin
control of uncer-tain time-delay systems with mixed neutral discrete anddistributed time-delays and Markovian switching parametersrdquoIEEE Transactions on Circuits and Systems I Regular Papersvol 58 no 8 pp 1910ndash1923 2011
[19] H E Soken and C Hajiyev ldquoPico satellite attitude estimationvia Robust Unscented Kalman Filter in the presence of mea-surement faultsrdquo ISA Transactions vol 49 no 3 pp 249ndash2562010
[20] C Hide T Moore and M Smith ldquoAdaptive Kalman filteringalgorithms for integratingGPS and low cost INSrdquo inProceedingsof the Position Location and Navigation Symposium (PLANSrsquo04) pp 227ndash233 April 2004
[21] CHajiyev ldquoAdaptive filtration algorithmwith the filter gain cor-rection applied to integrated INSradar altimeterrdquo Proceedingsof the Institution ofMechanical Engineers G Journal of AerospaceEngineering vol 221 no 5 pp 847ndash855 2007
[22] S C Douglas ldquoIntroduction to adaptive filtersrdquo inDigital SignalProcessing Fundamentals V KMadisetti Ed pp 1ndash18 Taylor ampFrancis Boca Raton Fla USA 2010
[23] KHKim JG Lee andCG Park ldquoAdaptive two-stageKalmanfilter in the presence of unknown random biasrdquo InternationalJournal of Adaptive Control and Signal Processing vol 20 no 7pp 305ndash319 2006
[24] Y Yang L Song and T Xu ldquoNew robust estimator for theadjustment of correlated GPS networksrdquo in Proceedings of the1st International Symposium on Robust Statistics and FuzzyTechniques inGeodesy andGIS A Carosio andHKutterer EdsNo 195 pp 199ndash208 IGP-Bericht 2001
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

4 Abstract and Applied Analysis
32 The Equivalent Covariance Matrix R119896of Observation
Vector z119896 From [24] the equivalent covariance matrix can
be obtained from bifactor variance expanding model whoseelement is
120590
119896119894119895=radic120582
119894radic120582
119895120590
119896119894119895
(21)
where 120590119896119894119895
is the corresponding element of prior variancecovariance and R
119896 120582119894 and 120582
119895are variance inflation factors
which can be taken as the reciprocal of Huber weightfunction that is
120582
119894119894=
1
1003816
1003816
1003816
1003816
V119894
1003816
1003816
1003816
1003816
=
1003816
1003816
1003816
1003816
1003816
1003816
1003816
1003816
1003816
V119894
120590V119894
1003816
1003816
1003816
1003816
1003816
1003816
1003816
1003816
1003816
le 119888
1003816
1003816
1003816
1003816
V119894
1003816
1003816
1003816
1003816
119888
1003816
1003816
1003816
1003816
V119894
1003816
1003816
1003816
1003816
ge 119888
(22)
where 119888 is constant and 119888 = 10 sim 15 V119894is standard-
ized residual Therefore the observation covariance matrixinflates when the observed error exceeds a certain rangeOtherwise the prior variance remains unchanged
33 The Selection of Adaptive Factor 120572119896 Because the innova-
tion vector can reflect the errors of the system we considersolving the adaptive factor by using innovation
In the process of filtering the innovation sequence can bedescribed as
vinn119896 = z119896minusH119896x119896(minus) (23)
and its theoretical covariance matrix is
Pinn119896 = H119896P119896(minus)H119879119896+ R119896 (24)
It can be seen from (20a)ndash(20e) in robust adaptivefiltering innovation covariance is adjusted to
Pinn119896 =1
120572
119896
H119896P119896(minus)H119879119896+ R119896 (25)
Considering that Pinn119896 represent actual innovationcovariance matrix the optimal adaptive factor 120572
119896based on
innovation covariance satisfies
Pinn119896 = Pinn119896 (26)
That is
Pinn119896 =1
120572
119896
H119896P119896(minus)H119879119896+ R119896 (27)
From (27) we obtain
120572
119896(
Pinn119896 minus R119896) = H
119896P119896(minus)H119879119896 (28)
Substituting (24) in (28) we have
120572
119896(
Pinn119896 minus R119896) = Pinn119896 minus R
119896 (29)
So the optimal adaptive factor could be expressed as
120572
119896=
tr (Pinn119896 minus R119896)
tr (Pinn119896 minus R119896)
(30)
As the value range of adaptive factor 120572119896is (0 1]
120572
119896=
1 tr (Pinn119896) ge tr (Pinn119896)
tr (Pinn119896 minus R119896)
tr (Pinn119896 minus R119896)
tr (Pinn119896) lt tr (Pinn119896) (31)
where tr(sdot) is trace of matrix By omitting the same items in(31) an approximate optimal adaptive factor can be obtained
120572
119896=
1 tr (Pinn119896) ge tr (Pinn119896)
tr (Pinn119896)
tr (Pinn119896)tr (Pinn119896) lt tr (Pinn119896)
(32)
Using the innovation vector of current sampling time todescribe the real covariance we have
Pinn119896 = Vinn119896V119879
inn119896 (33)
Consider
tr (Pinn119896) = V119879inn119896Vinn119896 (34)
The approximate optimal adaptive factor can be describedas
120572
119896=
1 tr (Pinn119896) ge tr (Pinn119896)
tr (Pinn119896)
V119879inn119896Vinn119896tr (Pinn119896) lt tr (Pinn119896)
(35)
Compared with the standard EKF the robust adaptivefiltering only adds a judgment process of two scalar factors inthe loop of each step the complexity and calculated quantityof which will not be increased substantially When the vari-ance inflation factor120582
119894119894= 1 thismeans that themeasurement
noise is the same as the original statistical characteristic therobust adaptive filtering degenerate into adaptive filteringWhen the adaptive factor 120572
119896= 1 it degenerates into robust
filtering When 120582
119894119894= 1 and 120572
119896= 1 it is the traditional
Kalman filtering So the robust adaptive filtering is stillKalman filtering substantially which is capable of adapting tothe influence of uncertain factors by adjusting the parametersproperly and can realize the states estimate in the conditionof uncertain factors
For nonlinear continuous system
x = 119891 (x) + w (36a)
z = ℎ (x) + v (36b)
Abstract and Applied Analysis 5
By Taylor series expansion and discretization we obtain arobust adaptive filtering algorithm for nonlinear continuoussystem Consider
x119896(minus) = int
119896Δ119905
(119896minus1)Δ119905
119891 (x119896minus1
(+)) 119889119905(37a)
P119896(minus) =
1
120572
119896
(Φ119896minus1
P119896minus1
(+)Φ119879
119896minus1+Q119896) (37b)
K119896= P119896(minus)H119879119896(H119896P119896(minus)H119879119896+ R119896)
minus1 (37c)
x119896(+) = x
119896(minus) + K
119896(z119896minus ℎ (x
119896(minus))) (37d)
P119896(+) = (I minus K
119896H119896)P119896(minus) (37e)
where Φ119896= 119868 + (120597119891(119909)120597119909)|x=x119896(minus) sdot Δ119905 H119896 = (120597ℎ(119909)
120597119909)|x=x119896(minus) and Δ119905 are sampling time steps
4 Mathematical Simulation and Analysis
In this section the performance of the robust adaptivefiltering is verified by mathematical simulation
In the simulation the real parameters ofmicrosatellite aregiven as below
The moment of inertia of satellite is
J = [[
181 04 minus048
04 163 minus461
minus048 minus461 1795
]
]
kgm2 (38)
The initial position and velocity of satellite are
r0= [516306203 427599216 minus856]
119879m
v0= [minus32881720 39649749 52634825]
119879ms(39)
The initial attitude quaternion and angular velocity are
q0= [0 0 0 1]
119879
1205960= [0 0 0]
119879 rads(40)
The measurement accuracy of magnetometer is 100 nTthe constant drift of gyro is 3 degh the measurementaccuracy of it is 01 radh the sampling period is 1 s and thesimulation time is 10000 s
For the determination of orbit taking the earth magneticfield as measurement information and using the standardEKF algorithm for estimation the initial simulation parame-ters are set as follows and the simulation results are shown inFigure 2 to Figure 3
r0= [516406203 427699216 1000]
119879m
v0= [minus31881720 38649749 51634825]
119879ms
Q0= diag ([1 1 1 1 1 1] lowast 1119890 minus 8)
P0= diag ([1000 1000 1000 100 100 100]2)
(41)
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000minus3
minus25
minus2
minus15
minus1
minus05
0
05
1
15
Posit
ion
estim
atio
n er
rors
(m)
Time (s)
times104
Figure 2 Position estimation errors
After determining the satellite orbit parameters takingthe estimated results as the input of the attitude determinesystem attitude robust adaptive filtering algorithm is adoptedto determine the attitude and simulation initial parameters asfollows and the simulation results are shown in Figure 4
q0= [00523 minus00474 00523 09961]
119879
b0= [35 35 35]
119879 deg h
Q0= diag ([1 1 1 1 1 1] lowast 1119890 minus 10)
P0= diag ( [00474 00523 00474 024119890 minus 5
024119890 minus 5 024119890 minus 5]
2)
(42)
Figure 2 shows the three-axis position estimation errorsby taking the magnitude of the geomagnetic field as observa-tion Figure 3 shows the estimation errors of correspondingorbital elements As seen from the figures when the positionerror is 1000meters the effect of the errors cannot be ignoredfor both attitude kinematics equation and the observationequation Figure 4 shows the attitude estimation errors basedon traditional EKF and robust adaptive filter It is can be seenfrom Figure 4 The estimation precision of the traditionalEKF is about 02 degrees and the maximum estimate error ofthe robust adaptive filter proposed in this paper is 01 degreesthe accuracy has improved significantly Furthermore theoscillation of robust adaptive filter estimation results issmaller and the curve is smoother it also illustrates thatthe robust adaptive filter has stronger ability to adapt to theinterference or uncertainty
5 Conclusions
In this paper a robust adaptive Kalman filtering algorithmis proposed aiming to investigate the influence of the orbitdetermination errors on the attitude determination This
6 Abstract and Applied Analysis
0 5000 10000minus06
minus04
minus02
0
02
04
Orb
ital i
nclin
atio
n er
ror (
deg)
Time (s)
(a)
0 5000 10000minus10
minus5
0
5
Time (s)
RAA
N (d
eg)
times10minus3
(b)
0 5000 10000minus2
minus1
0
1
2
True
anom
aly
erro
r (de
g)
Time (s)
(c)
0 5000 10000minus2
minus1
0
1
2
Time (s)
Arg
umen
t of p
eria
psis
erro
r (de
g)
(d)
Figure 3 Orbital elements estimation errors
7000 7500 8000 8500 9000 9500 100000
005
01
015
02
025
03
035
04
045
05
EKFRAEKF
Time (s)
Attit
ude e
stim
atio
n er
rors
(deg
)
Figure 4 Attitude estimation errors RSS
Abstract and Applied Analysis 7
algorithm not only adaptively adjusts the covariance of theobservation noise but also adjusts the covariance matrix ofone-step prediction using the adaptive factor which changesthe weight of old data and observation information in thefilter getting a more appropriate Kalman gain The noisevariance inflation factor based on Huber weight functionand adaptive factor based on the innovation proposed inthis paper ensure the approximate optimal of filtering resultsBy taking attitude determination of small satellite withmagnetometer and gyro combination as an example a seriesof mathematical simulations are carried outThe results showthat the proposed robust adaptive filtering algorithm canbetter cope with the interference of noise and uncertaintyof system model parameter which provide a higher accuracyof attitude determination results under the premise of errorsexisting in orbit parameters determination
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] J Cote and J De Lafontaine ldquoMagnetic-only orbit and attitudeestimation using the Square-Root Unscented Kalman Filterapplication to the PROBA-2 spacecraftrdquo in Proceedings ofthe AIAA Guidance Navigation and Control Conference andExhibit Honolulu Hawaii USA August 2008
[2] M L Psiaki L Huang and S M Fox ldquoGround tests ofmagnetometer-based autonomous navigation (MAGNAV) forlow-earth-orbiting spacecraftrdquo Journal of Guidance Controland Dynamics vol 16 no 1 pp 206ndash214 1993
[3] M Wiegand ldquoAutonomous satellite navigation via Kalmanfiltering of magnetometer datardquo Acta Astronautica vol 38 no4-8 pp 395ndash403 1996
[4] H Jung and M L Psiaki ldquoTests of magnetometersun-sensororbit determination using flight datardquo Journal of GuidanceControl and Dynamics vol 25 no 3 pp 582ndash590 2002
[5] J K Thienel R R Harman I Y Bar-Itzhack and M Lam-bertson ldquoResults of the magnetometer navigation (MAGNAV)inflight experimentrdquo in Proceedings of the AIAAAAS Astrody-namics Specialist Conference and Exhibit pp 206ndash222 Provi-dence RI USA August 2004
[6] P Tortora Y Oshman and F Santoni ldquoSpacecraft angular rateestimation from magnetometer data only using an analyticpredictorrdquo Journal of Guidance Control and Dynamics vol 27no 3 pp 365ndash373 2004
[7] W Ding J Wang C Rizos and D Kinlyside ldquoImprovingadaptive kalman estimation in GPSINS integrationrdquo Journal ofNavigation vol 60 no 3 pp 517ndash529 2007
[8] S Gao Y Zhong and W Li ldquoRobust adaptive filtering methodfor SINSSAR integrated navigation systemrdquo Aerospace Scienceand Technology vol 15 no 6 pp 425ndash430 2011
[9] H Zhang Y Shi and J Wang ldquoOn energy-to-peak filtering fornonuniformly sampled nonlinear systems a Markovian jumpsystem approachrdquo IEEE Transactions on Fuzzy Systems vol 22no 1 pp 212ndash222 2013
[10] H Zhang Y Shi and A Saadat Mehr ldquoRobust energy-to-peakfiltering for networked systems with time-varying delays and
randomlymissing datardquo IET ControlTheoryampApplications vol4 no 12 pp 2921ndash2936 2010
[11] H Zhang A S Mehr and Y Shi ldquoImproved robust energy-to-peak filtering for uncertain linear systemsrdquo Signal Processingvol 90 no 9 pp 2667ndash2675 2010
[12] H Zhang and Y Shi ldquoParameter-dependent 119867infin
filteringfor linear time-varying systemsrdquo Journal of Dynamic SystemsMeasurement and Control vol 135 no 2 Article ID 0210062013
[13] H Gao J Lam and C Wang ldquoMixed 119867
2119867
infinfiltering for
continuous-time polytopic systems a parameter-dependentapproachrdquo Circuits Systems and Signal Processing vol 24 no6 pp 689ndash702 2005
[14] H Zhang Y Shi and A Saadat Mehr ldquoOn 119867
infinfiltering for
discrete-time takagi-sugeno fuzzy systemsrdquo IEEE Transactionson Fuzzy Systems vol 20 no 2 pp 396ndash401 2012
[15] J Zarei M A Tajeddini and H R Karimi ldquoVibration analysisfor bearing fault detection and classification using an intelligentfilterrdquoMechatronics vol 24 pp 151ndash157 2014
[16] Y Wei J Qiu H Reza Karimi et al ldquoA new design of 119867infin
filtering for continuous-time Markovian jump systems withtime-varying delay and partially accessible mode informationrdquoSignal Processing vol 93 no 9 pp 2392ndash2407 2013
[17] M Basin J J Maldonado and H R Karimi ldquoMean-squarefiltering for polynomial system states confused with poissonnoises over polynomial observationsrdquo Modeling Identificationand Control vol 32 no 2 pp 47ndash55 2011
[18] H R Karimi ldquoRobust delay-dependent 119867infin
control of uncer-tain time-delay systems with mixed neutral discrete anddistributed time-delays and Markovian switching parametersrdquoIEEE Transactions on Circuits and Systems I Regular Papersvol 58 no 8 pp 1910ndash1923 2011
[19] H E Soken and C Hajiyev ldquoPico satellite attitude estimationvia Robust Unscented Kalman Filter in the presence of mea-surement faultsrdquo ISA Transactions vol 49 no 3 pp 249ndash2562010
[20] C Hide T Moore and M Smith ldquoAdaptive Kalman filteringalgorithms for integratingGPS and low cost INSrdquo inProceedingsof the Position Location and Navigation Symposium (PLANSrsquo04) pp 227ndash233 April 2004
[21] CHajiyev ldquoAdaptive filtration algorithmwith the filter gain cor-rection applied to integrated INSradar altimeterrdquo Proceedingsof the Institution ofMechanical Engineers G Journal of AerospaceEngineering vol 221 no 5 pp 847ndash855 2007
[22] S C Douglas ldquoIntroduction to adaptive filtersrdquo inDigital SignalProcessing Fundamentals V KMadisetti Ed pp 1ndash18 Taylor ampFrancis Boca Raton Fla USA 2010
[23] KHKim JG Lee andCG Park ldquoAdaptive two-stageKalmanfilter in the presence of unknown random biasrdquo InternationalJournal of Adaptive Control and Signal Processing vol 20 no 7pp 305ndash319 2006
[24] Y Yang L Song and T Xu ldquoNew robust estimator for theadjustment of correlated GPS networksrdquo in Proceedings of the1st International Symposium on Robust Statistics and FuzzyTechniques inGeodesy andGIS A Carosio andHKutterer EdsNo 195 pp 199ndash208 IGP-Bericht 2001
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Abstract and Applied Analysis 5
By Taylor series expansion and discretization we obtain arobust adaptive filtering algorithm for nonlinear continuoussystem Consider
x119896(minus) = int
119896Δ119905
(119896minus1)Δ119905
119891 (x119896minus1
(+)) 119889119905(37a)
P119896(minus) =
1
120572
119896
(Φ119896minus1
P119896minus1
(+)Φ119879
119896minus1+Q119896) (37b)
K119896= P119896(minus)H119879119896(H119896P119896(minus)H119879119896+ R119896)
minus1 (37c)
x119896(+) = x
119896(minus) + K
119896(z119896minus ℎ (x
119896(minus))) (37d)
P119896(+) = (I minus K
119896H119896)P119896(minus) (37e)
where Φ119896= 119868 + (120597119891(119909)120597119909)|x=x119896(minus) sdot Δ119905 H119896 = (120597ℎ(119909)
120597119909)|x=x119896(minus) and Δ119905 are sampling time steps
4 Mathematical Simulation and Analysis
In this section the performance of the robust adaptivefiltering is verified by mathematical simulation
In the simulation the real parameters ofmicrosatellite aregiven as below
The moment of inertia of satellite is
J = [[
181 04 minus048
04 163 minus461
minus048 minus461 1795
]
]
kgm2 (38)
The initial position and velocity of satellite are
r0= [516306203 427599216 minus856]
119879m
v0= [minus32881720 39649749 52634825]
119879ms(39)
The initial attitude quaternion and angular velocity are
q0= [0 0 0 1]
119879
1205960= [0 0 0]
119879 rads(40)
The measurement accuracy of magnetometer is 100 nTthe constant drift of gyro is 3 degh the measurementaccuracy of it is 01 radh the sampling period is 1 s and thesimulation time is 10000 s
For the determination of orbit taking the earth magneticfield as measurement information and using the standardEKF algorithm for estimation the initial simulation parame-ters are set as follows and the simulation results are shown inFigure 2 to Figure 3
r0= [516406203 427699216 1000]
119879m
v0= [minus31881720 38649749 51634825]
119879ms
Q0= diag ([1 1 1 1 1 1] lowast 1119890 minus 8)
P0= diag ([1000 1000 1000 100 100 100]2)
(41)
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000minus3
minus25
minus2
minus15
minus1
minus05
0
05
1
15
Posit
ion
estim
atio
n er
rors
(m)
Time (s)
times104
Figure 2 Position estimation errors
After determining the satellite orbit parameters takingthe estimated results as the input of the attitude determinesystem attitude robust adaptive filtering algorithm is adoptedto determine the attitude and simulation initial parameters asfollows and the simulation results are shown in Figure 4
q0= [00523 minus00474 00523 09961]
119879
b0= [35 35 35]
119879 deg h
Q0= diag ([1 1 1 1 1 1] lowast 1119890 minus 10)
P0= diag ( [00474 00523 00474 024119890 minus 5
024119890 minus 5 024119890 minus 5]
2)
(42)
Figure 2 shows the three-axis position estimation errorsby taking the magnitude of the geomagnetic field as observa-tion Figure 3 shows the estimation errors of correspondingorbital elements As seen from the figures when the positionerror is 1000meters the effect of the errors cannot be ignoredfor both attitude kinematics equation and the observationequation Figure 4 shows the attitude estimation errors basedon traditional EKF and robust adaptive filter It is can be seenfrom Figure 4 The estimation precision of the traditionalEKF is about 02 degrees and the maximum estimate error ofthe robust adaptive filter proposed in this paper is 01 degreesthe accuracy has improved significantly Furthermore theoscillation of robust adaptive filter estimation results issmaller and the curve is smoother it also illustrates thatthe robust adaptive filter has stronger ability to adapt to theinterference or uncertainty
5 Conclusions
In this paper a robust adaptive Kalman filtering algorithmis proposed aiming to investigate the influence of the orbitdetermination errors on the attitude determination This
6 Abstract and Applied Analysis
0 5000 10000minus06
minus04
minus02
0
02
04
Orb
ital i
nclin
atio
n er
ror (
deg)
Time (s)
(a)
0 5000 10000minus10
minus5
0
5
Time (s)
RAA
N (d
eg)
times10minus3
(b)
0 5000 10000minus2
minus1
0
1
2
True
anom
aly
erro
r (de
g)
Time (s)
(c)
0 5000 10000minus2
minus1
0
1
2
Time (s)
Arg
umen
t of p
eria
psis
erro
r (de
g)
(d)
Figure 3 Orbital elements estimation errors
7000 7500 8000 8500 9000 9500 100000
005
01
015
02
025
03
035
04
045
05
EKFRAEKF
Time (s)
Attit
ude e
stim
atio
n er
rors
(deg
)
Figure 4 Attitude estimation errors RSS
Abstract and Applied Analysis 7
algorithm not only adaptively adjusts the covariance of theobservation noise but also adjusts the covariance matrix ofone-step prediction using the adaptive factor which changesthe weight of old data and observation information in thefilter getting a more appropriate Kalman gain The noisevariance inflation factor based on Huber weight functionand adaptive factor based on the innovation proposed inthis paper ensure the approximate optimal of filtering resultsBy taking attitude determination of small satellite withmagnetometer and gyro combination as an example a seriesof mathematical simulations are carried outThe results showthat the proposed robust adaptive filtering algorithm canbetter cope with the interference of noise and uncertaintyof system model parameter which provide a higher accuracyof attitude determination results under the premise of errorsexisting in orbit parameters determination
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] J Cote and J De Lafontaine ldquoMagnetic-only orbit and attitudeestimation using the Square-Root Unscented Kalman Filterapplication to the PROBA-2 spacecraftrdquo in Proceedings ofthe AIAA Guidance Navigation and Control Conference andExhibit Honolulu Hawaii USA August 2008
[2] M L Psiaki L Huang and S M Fox ldquoGround tests ofmagnetometer-based autonomous navigation (MAGNAV) forlow-earth-orbiting spacecraftrdquo Journal of Guidance Controland Dynamics vol 16 no 1 pp 206ndash214 1993
[3] M Wiegand ldquoAutonomous satellite navigation via Kalmanfiltering of magnetometer datardquo Acta Astronautica vol 38 no4-8 pp 395ndash403 1996
[4] H Jung and M L Psiaki ldquoTests of magnetometersun-sensororbit determination using flight datardquo Journal of GuidanceControl and Dynamics vol 25 no 3 pp 582ndash590 2002
[5] J K Thienel R R Harman I Y Bar-Itzhack and M Lam-bertson ldquoResults of the magnetometer navigation (MAGNAV)inflight experimentrdquo in Proceedings of the AIAAAAS Astrody-namics Specialist Conference and Exhibit pp 206ndash222 Provi-dence RI USA August 2004
[6] P Tortora Y Oshman and F Santoni ldquoSpacecraft angular rateestimation from magnetometer data only using an analyticpredictorrdquo Journal of Guidance Control and Dynamics vol 27no 3 pp 365ndash373 2004
[7] W Ding J Wang C Rizos and D Kinlyside ldquoImprovingadaptive kalman estimation in GPSINS integrationrdquo Journal ofNavigation vol 60 no 3 pp 517ndash529 2007
[8] S Gao Y Zhong and W Li ldquoRobust adaptive filtering methodfor SINSSAR integrated navigation systemrdquo Aerospace Scienceand Technology vol 15 no 6 pp 425ndash430 2011
[9] H Zhang Y Shi and J Wang ldquoOn energy-to-peak filtering fornonuniformly sampled nonlinear systems a Markovian jumpsystem approachrdquo IEEE Transactions on Fuzzy Systems vol 22no 1 pp 212ndash222 2013
[10] H Zhang Y Shi and A Saadat Mehr ldquoRobust energy-to-peakfiltering for networked systems with time-varying delays and
randomlymissing datardquo IET ControlTheoryampApplications vol4 no 12 pp 2921ndash2936 2010
[11] H Zhang A S Mehr and Y Shi ldquoImproved robust energy-to-peak filtering for uncertain linear systemsrdquo Signal Processingvol 90 no 9 pp 2667ndash2675 2010
[12] H Zhang and Y Shi ldquoParameter-dependent 119867infin
filteringfor linear time-varying systemsrdquo Journal of Dynamic SystemsMeasurement and Control vol 135 no 2 Article ID 0210062013
[13] H Gao J Lam and C Wang ldquoMixed 119867
2119867
infinfiltering for
continuous-time polytopic systems a parameter-dependentapproachrdquo Circuits Systems and Signal Processing vol 24 no6 pp 689ndash702 2005
[14] H Zhang Y Shi and A Saadat Mehr ldquoOn 119867
infinfiltering for
discrete-time takagi-sugeno fuzzy systemsrdquo IEEE Transactionson Fuzzy Systems vol 20 no 2 pp 396ndash401 2012
[15] J Zarei M A Tajeddini and H R Karimi ldquoVibration analysisfor bearing fault detection and classification using an intelligentfilterrdquoMechatronics vol 24 pp 151ndash157 2014
[16] Y Wei J Qiu H Reza Karimi et al ldquoA new design of 119867infin
filtering for continuous-time Markovian jump systems withtime-varying delay and partially accessible mode informationrdquoSignal Processing vol 93 no 9 pp 2392ndash2407 2013
[17] M Basin J J Maldonado and H R Karimi ldquoMean-squarefiltering for polynomial system states confused with poissonnoises over polynomial observationsrdquo Modeling Identificationand Control vol 32 no 2 pp 47ndash55 2011
[18] H R Karimi ldquoRobust delay-dependent 119867infin
control of uncer-tain time-delay systems with mixed neutral discrete anddistributed time-delays and Markovian switching parametersrdquoIEEE Transactions on Circuits and Systems I Regular Papersvol 58 no 8 pp 1910ndash1923 2011
[19] H E Soken and C Hajiyev ldquoPico satellite attitude estimationvia Robust Unscented Kalman Filter in the presence of mea-surement faultsrdquo ISA Transactions vol 49 no 3 pp 249ndash2562010
[20] C Hide T Moore and M Smith ldquoAdaptive Kalman filteringalgorithms for integratingGPS and low cost INSrdquo inProceedingsof the Position Location and Navigation Symposium (PLANSrsquo04) pp 227ndash233 April 2004
[21] CHajiyev ldquoAdaptive filtration algorithmwith the filter gain cor-rection applied to integrated INSradar altimeterrdquo Proceedingsof the Institution ofMechanical Engineers G Journal of AerospaceEngineering vol 221 no 5 pp 847ndash855 2007
[22] S C Douglas ldquoIntroduction to adaptive filtersrdquo inDigital SignalProcessing Fundamentals V KMadisetti Ed pp 1ndash18 Taylor ampFrancis Boca Raton Fla USA 2010
[23] KHKim JG Lee andCG Park ldquoAdaptive two-stageKalmanfilter in the presence of unknown random biasrdquo InternationalJournal of Adaptive Control and Signal Processing vol 20 no 7pp 305ndash319 2006
[24] Y Yang L Song and T Xu ldquoNew robust estimator for theadjustment of correlated GPS networksrdquo in Proceedings of the1st International Symposium on Robust Statistics and FuzzyTechniques inGeodesy andGIS A Carosio andHKutterer EdsNo 195 pp 199ndash208 IGP-Bericht 2001
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
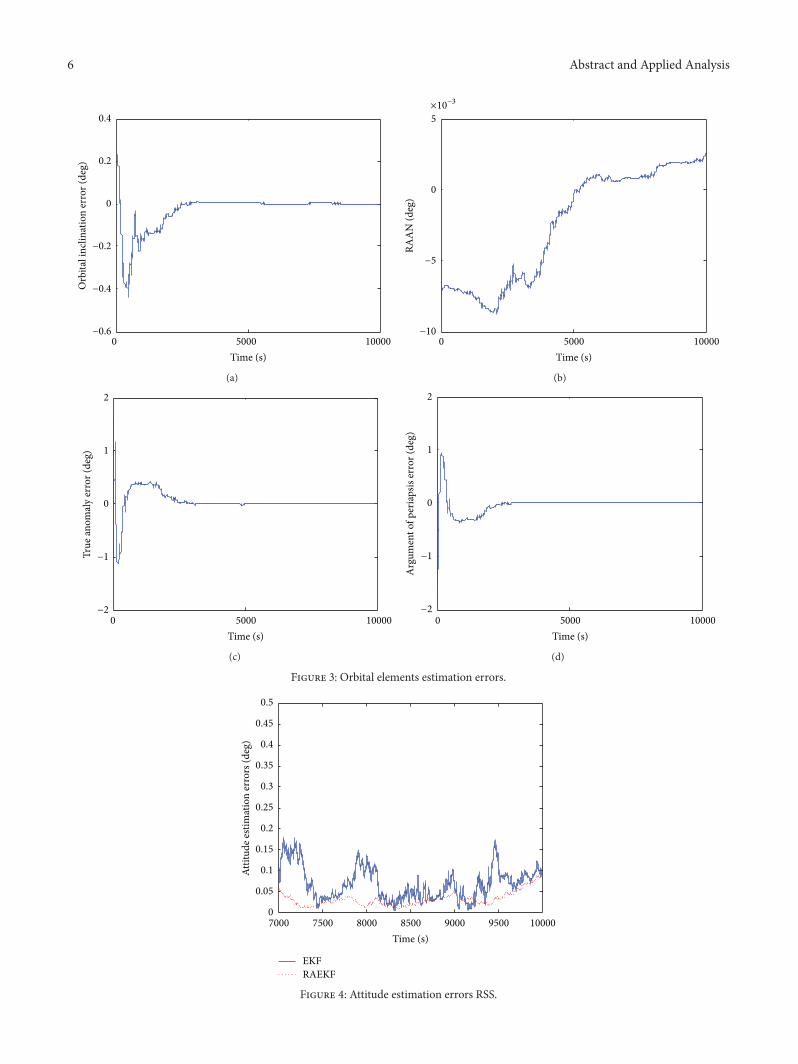
6 Abstract and Applied Analysis
0 5000 10000minus06
minus04
minus02
0
02
04
Orb
ital i
nclin
atio
n er
ror (
deg)
Time (s)
(a)
0 5000 10000minus10
minus5
0
5
Time (s)
RAA
N (d
eg)
times10minus3
(b)
0 5000 10000minus2
minus1
0
1
2
True
anom
aly
erro
r (de
g)
Time (s)
(c)
0 5000 10000minus2
minus1
0
1
2
Time (s)
Arg
umen
t of p
eria
psis
erro
r (de
g)
(d)
Figure 3 Orbital elements estimation errors
7000 7500 8000 8500 9000 9500 100000
005
01
015
02
025
03
035
04
045
05
EKFRAEKF
Time (s)
Attit
ude e
stim
atio
n er
rors
(deg
)
Figure 4 Attitude estimation errors RSS
Abstract and Applied Analysis 7
algorithm not only adaptively adjusts the covariance of theobservation noise but also adjusts the covariance matrix ofone-step prediction using the adaptive factor which changesthe weight of old data and observation information in thefilter getting a more appropriate Kalman gain The noisevariance inflation factor based on Huber weight functionand adaptive factor based on the innovation proposed inthis paper ensure the approximate optimal of filtering resultsBy taking attitude determination of small satellite withmagnetometer and gyro combination as an example a seriesof mathematical simulations are carried outThe results showthat the proposed robust adaptive filtering algorithm canbetter cope with the interference of noise and uncertaintyof system model parameter which provide a higher accuracyof attitude determination results under the premise of errorsexisting in orbit parameters determination
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] J Cote and J De Lafontaine ldquoMagnetic-only orbit and attitudeestimation using the Square-Root Unscented Kalman Filterapplication to the PROBA-2 spacecraftrdquo in Proceedings ofthe AIAA Guidance Navigation and Control Conference andExhibit Honolulu Hawaii USA August 2008
[2] M L Psiaki L Huang and S M Fox ldquoGround tests ofmagnetometer-based autonomous navigation (MAGNAV) forlow-earth-orbiting spacecraftrdquo Journal of Guidance Controland Dynamics vol 16 no 1 pp 206ndash214 1993
[3] M Wiegand ldquoAutonomous satellite navigation via Kalmanfiltering of magnetometer datardquo Acta Astronautica vol 38 no4-8 pp 395ndash403 1996
[4] H Jung and M L Psiaki ldquoTests of magnetometersun-sensororbit determination using flight datardquo Journal of GuidanceControl and Dynamics vol 25 no 3 pp 582ndash590 2002
[5] J K Thienel R R Harman I Y Bar-Itzhack and M Lam-bertson ldquoResults of the magnetometer navigation (MAGNAV)inflight experimentrdquo in Proceedings of the AIAAAAS Astrody-namics Specialist Conference and Exhibit pp 206ndash222 Provi-dence RI USA August 2004
[6] P Tortora Y Oshman and F Santoni ldquoSpacecraft angular rateestimation from magnetometer data only using an analyticpredictorrdquo Journal of Guidance Control and Dynamics vol 27no 3 pp 365ndash373 2004
[7] W Ding J Wang C Rizos and D Kinlyside ldquoImprovingadaptive kalman estimation in GPSINS integrationrdquo Journal ofNavigation vol 60 no 3 pp 517ndash529 2007
[8] S Gao Y Zhong and W Li ldquoRobust adaptive filtering methodfor SINSSAR integrated navigation systemrdquo Aerospace Scienceand Technology vol 15 no 6 pp 425ndash430 2011
[9] H Zhang Y Shi and J Wang ldquoOn energy-to-peak filtering fornonuniformly sampled nonlinear systems a Markovian jumpsystem approachrdquo IEEE Transactions on Fuzzy Systems vol 22no 1 pp 212ndash222 2013
[10] H Zhang Y Shi and A Saadat Mehr ldquoRobust energy-to-peakfiltering for networked systems with time-varying delays and
randomlymissing datardquo IET ControlTheoryampApplications vol4 no 12 pp 2921ndash2936 2010
[11] H Zhang A S Mehr and Y Shi ldquoImproved robust energy-to-peak filtering for uncertain linear systemsrdquo Signal Processingvol 90 no 9 pp 2667ndash2675 2010
[12] H Zhang and Y Shi ldquoParameter-dependent 119867infin
filteringfor linear time-varying systemsrdquo Journal of Dynamic SystemsMeasurement and Control vol 135 no 2 Article ID 0210062013
[13] H Gao J Lam and C Wang ldquoMixed 119867
2119867
infinfiltering for
continuous-time polytopic systems a parameter-dependentapproachrdquo Circuits Systems and Signal Processing vol 24 no6 pp 689ndash702 2005
[14] H Zhang Y Shi and A Saadat Mehr ldquoOn 119867
infinfiltering for
discrete-time takagi-sugeno fuzzy systemsrdquo IEEE Transactionson Fuzzy Systems vol 20 no 2 pp 396ndash401 2012
[15] J Zarei M A Tajeddini and H R Karimi ldquoVibration analysisfor bearing fault detection and classification using an intelligentfilterrdquoMechatronics vol 24 pp 151ndash157 2014
[16] Y Wei J Qiu H Reza Karimi et al ldquoA new design of 119867infin
filtering for continuous-time Markovian jump systems withtime-varying delay and partially accessible mode informationrdquoSignal Processing vol 93 no 9 pp 2392ndash2407 2013
[17] M Basin J J Maldonado and H R Karimi ldquoMean-squarefiltering for polynomial system states confused with poissonnoises over polynomial observationsrdquo Modeling Identificationand Control vol 32 no 2 pp 47ndash55 2011
[18] H R Karimi ldquoRobust delay-dependent 119867infin
control of uncer-tain time-delay systems with mixed neutral discrete anddistributed time-delays and Markovian switching parametersrdquoIEEE Transactions on Circuits and Systems I Regular Papersvol 58 no 8 pp 1910ndash1923 2011
[19] H E Soken and C Hajiyev ldquoPico satellite attitude estimationvia Robust Unscented Kalman Filter in the presence of mea-surement faultsrdquo ISA Transactions vol 49 no 3 pp 249ndash2562010
[20] C Hide T Moore and M Smith ldquoAdaptive Kalman filteringalgorithms for integratingGPS and low cost INSrdquo inProceedingsof the Position Location and Navigation Symposium (PLANSrsquo04) pp 227ndash233 April 2004
[21] CHajiyev ldquoAdaptive filtration algorithmwith the filter gain cor-rection applied to integrated INSradar altimeterrdquo Proceedingsof the Institution ofMechanical Engineers G Journal of AerospaceEngineering vol 221 no 5 pp 847ndash855 2007
[22] S C Douglas ldquoIntroduction to adaptive filtersrdquo inDigital SignalProcessing Fundamentals V KMadisetti Ed pp 1ndash18 Taylor ampFrancis Boca Raton Fla USA 2010
[23] KHKim JG Lee andCG Park ldquoAdaptive two-stageKalmanfilter in the presence of unknown random biasrdquo InternationalJournal of Adaptive Control and Signal Processing vol 20 no 7pp 305ndash319 2006
[24] Y Yang L Song and T Xu ldquoNew robust estimator for theadjustment of correlated GPS networksrdquo in Proceedings of the1st International Symposium on Robust Statistics and FuzzyTechniques inGeodesy andGIS A Carosio andHKutterer EdsNo 195 pp 199ndash208 IGP-Bericht 2001
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Abstract and Applied Analysis 7
algorithm not only adaptively adjusts the covariance of theobservation noise but also adjusts the covariance matrix ofone-step prediction using the adaptive factor which changesthe weight of old data and observation information in thefilter getting a more appropriate Kalman gain The noisevariance inflation factor based on Huber weight functionand adaptive factor based on the innovation proposed inthis paper ensure the approximate optimal of filtering resultsBy taking attitude determination of small satellite withmagnetometer and gyro combination as an example a seriesof mathematical simulations are carried outThe results showthat the proposed robust adaptive filtering algorithm canbetter cope with the interference of noise and uncertaintyof system model parameter which provide a higher accuracyof attitude determination results under the premise of errorsexisting in orbit parameters determination
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] J Cote and J De Lafontaine ldquoMagnetic-only orbit and attitudeestimation using the Square-Root Unscented Kalman Filterapplication to the PROBA-2 spacecraftrdquo in Proceedings ofthe AIAA Guidance Navigation and Control Conference andExhibit Honolulu Hawaii USA August 2008
[2] M L Psiaki L Huang and S M Fox ldquoGround tests ofmagnetometer-based autonomous navigation (MAGNAV) forlow-earth-orbiting spacecraftrdquo Journal of Guidance Controland Dynamics vol 16 no 1 pp 206ndash214 1993
[3] M Wiegand ldquoAutonomous satellite navigation via Kalmanfiltering of magnetometer datardquo Acta Astronautica vol 38 no4-8 pp 395ndash403 1996
[4] H Jung and M L Psiaki ldquoTests of magnetometersun-sensororbit determination using flight datardquo Journal of GuidanceControl and Dynamics vol 25 no 3 pp 582ndash590 2002
[5] J K Thienel R R Harman I Y Bar-Itzhack and M Lam-bertson ldquoResults of the magnetometer navigation (MAGNAV)inflight experimentrdquo in Proceedings of the AIAAAAS Astrody-namics Specialist Conference and Exhibit pp 206ndash222 Provi-dence RI USA August 2004
[6] P Tortora Y Oshman and F Santoni ldquoSpacecraft angular rateestimation from magnetometer data only using an analyticpredictorrdquo Journal of Guidance Control and Dynamics vol 27no 3 pp 365ndash373 2004
[7] W Ding J Wang C Rizos and D Kinlyside ldquoImprovingadaptive kalman estimation in GPSINS integrationrdquo Journal ofNavigation vol 60 no 3 pp 517ndash529 2007
[8] S Gao Y Zhong and W Li ldquoRobust adaptive filtering methodfor SINSSAR integrated navigation systemrdquo Aerospace Scienceand Technology vol 15 no 6 pp 425ndash430 2011
[9] H Zhang Y Shi and J Wang ldquoOn energy-to-peak filtering fornonuniformly sampled nonlinear systems a Markovian jumpsystem approachrdquo IEEE Transactions on Fuzzy Systems vol 22no 1 pp 212ndash222 2013
[10] H Zhang Y Shi and A Saadat Mehr ldquoRobust energy-to-peakfiltering for networked systems with time-varying delays and
randomlymissing datardquo IET ControlTheoryampApplications vol4 no 12 pp 2921ndash2936 2010
[11] H Zhang A S Mehr and Y Shi ldquoImproved robust energy-to-peak filtering for uncertain linear systemsrdquo Signal Processingvol 90 no 9 pp 2667ndash2675 2010
[12] H Zhang and Y Shi ldquoParameter-dependent 119867infin
filteringfor linear time-varying systemsrdquo Journal of Dynamic SystemsMeasurement and Control vol 135 no 2 Article ID 0210062013
[13] H Gao J Lam and C Wang ldquoMixed 119867
2119867
infinfiltering for
continuous-time polytopic systems a parameter-dependentapproachrdquo Circuits Systems and Signal Processing vol 24 no6 pp 689ndash702 2005
[14] H Zhang Y Shi and A Saadat Mehr ldquoOn 119867
infinfiltering for
discrete-time takagi-sugeno fuzzy systemsrdquo IEEE Transactionson Fuzzy Systems vol 20 no 2 pp 396ndash401 2012
[15] J Zarei M A Tajeddini and H R Karimi ldquoVibration analysisfor bearing fault detection and classification using an intelligentfilterrdquoMechatronics vol 24 pp 151ndash157 2014
[16] Y Wei J Qiu H Reza Karimi et al ldquoA new design of 119867infin
filtering for continuous-time Markovian jump systems withtime-varying delay and partially accessible mode informationrdquoSignal Processing vol 93 no 9 pp 2392ndash2407 2013
[17] M Basin J J Maldonado and H R Karimi ldquoMean-squarefiltering for polynomial system states confused with poissonnoises over polynomial observationsrdquo Modeling Identificationand Control vol 32 no 2 pp 47ndash55 2011
[18] H R Karimi ldquoRobust delay-dependent 119867infin
control of uncer-tain time-delay systems with mixed neutral discrete anddistributed time-delays and Markovian switching parametersrdquoIEEE Transactions on Circuits and Systems I Regular Papersvol 58 no 8 pp 1910ndash1923 2011
[19] H E Soken and C Hajiyev ldquoPico satellite attitude estimationvia Robust Unscented Kalman Filter in the presence of mea-surement faultsrdquo ISA Transactions vol 49 no 3 pp 249ndash2562010
[20] C Hide T Moore and M Smith ldquoAdaptive Kalman filteringalgorithms for integratingGPS and low cost INSrdquo inProceedingsof the Position Location and Navigation Symposium (PLANSrsquo04) pp 227ndash233 April 2004
[21] CHajiyev ldquoAdaptive filtration algorithmwith the filter gain cor-rection applied to integrated INSradar altimeterrdquo Proceedingsof the Institution ofMechanical Engineers G Journal of AerospaceEngineering vol 221 no 5 pp 847ndash855 2007
[22] S C Douglas ldquoIntroduction to adaptive filtersrdquo inDigital SignalProcessing Fundamentals V KMadisetti Ed pp 1ndash18 Taylor ampFrancis Boca Raton Fla USA 2010
[23] KHKim JG Lee andCG Park ldquoAdaptive two-stageKalmanfilter in the presence of unknown random biasrdquo InternationalJournal of Adaptive Control and Signal Processing vol 20 no 7pp 305ndash319 2006
[24] Y Yang L Song and T Xu ldquoNew robust estimator for theadjustment of correlated GPS networksrdquo in Proceedings of the1st International Symposium on Robust Statistics and FuzzyTechniques inGeodesy andGIS A Carosio andHKutterer EdsNo 195 pp 199ndash208 IGP-Bericht 2001
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of