rancang bangun sistem pengukuran putaran sudu turbin dan
TRANSCRIPT

Seminar Nasional Applied Science and Technology Innovation 2012 (ASTECHNOVA 2012) ISSN: 2086-0005
Yogyakarta, 22 November 2012
RANCANG BANGUN SISTEM PENGUKURAN PUTARAN SUDU TURBIN DAN
PEREKAM DATA BERBASIS MIKROKONTROLER AVR ATMEGA16 PADA
TURBIN ANGIN DI PANTAI BARU, NGENTAK, BANTUL
Hanapi Ali
1, Nazrul Effendy
2, Rachmawan Budiarto
3
123Jurusan Teknik Fisika, Fakultas Teknik,Universitas Gadjah Mada
Jl.Grafika 2, Yogyakarta 55281
Telp. (0274) 58088, Faks. (0274)580882
E-mail: [email protected]
ABSTRAKS
Kecepatan angin dan desain sudu mempengaruhi besarnya kecepatan putaran sudu, sehingga data kecepatan
putar sudu turbin menjadi salah satu acuan untuk berbagai keperluan seperti mendesain sudu turbin, data
pembanding dengan output generator dalam menentukan kinerja generator, dan sistem keamanan turbin.
Tujuan dari penelitian ini adalah merancang bangun sistem pengukuran yang dapat memberikan data kondisi
terkini dari frekuensi putaran sudu turbin angin serta menyimpan data tersebut setiap waktunya.
Penelitian ini dilaksanakan di dua tempat yaitu di laboratorium Energi Terbarukan Jurusan Teknik Fisika
UGM, dan Pembangkit Listrik Tenaga Hibrid (PLTH) Angin-Surya di Pantai Baru. Sistem yang dirancang
meliputi sistem pengukuran kecepatan putaran sudu turbin yang dilengkapi dengan perekam data. Sistem
pengukuran kecepatan terdiri dari laser pointer dan fotodioda serta memori MMC berkapasitas 512MB untuk
menyimpan data.
Hasil penelitian menunjukkan bahwa resolusi rata–rata alat ukur sebesar 1 rps dengan tingkat akurasi sebesar
98,84% dan pada tingkat kepercayaan 95% nilai presisinya adalah 15,92 rpm. Rentang pengukuran sebesar 0-
9999 rpm. Sistem perekam data yang dirancang mampu menyimpan data selama 115 hari untuk pengambilan
data setiap 10 detik selama 24 jam setiap hari.
Kata Kunci : Sudu Turbin, Perekam Data, mikrokontroler, pengukuran
1. PENDAHULUAN
Di Pantai Baru, Ngentak, Bantul, D.I Yogyakarta, sedang dilakukan pengembangan pemanfaatan alternatif baru dan terbarukan untuk menghasilkan listrik dengan mensinergikan sistem sel surya dan turbin angin.
Turbin angin adalah alat yang digunakan untuk merubah energi angin (kinetik) menjadi energi listrik. Dalam menghasilkan listrik, turbin angin dipengaruhi oleh kecepatan angin, desain sudu, dan kinerja generator. Kecepatan angin dan desain sudu mempengaruhi besarnya kecepatan putaran sudu sehingga data kecepatan putar sudu turbin menjadi salah satu acuan untuk berbagai keperluan seperti mendesain turbin, data pembanding dengan output generator dalam menentukan kinerja generator dan sistem keamanan turbin.
Permasalahan yang terjadi pada turbin angin di Pantai Baru adalah tidak adanya data history kecepatan putar sudu turbin. Oleh karena itu, diperlukan suatu sistem pengukuran yang dapat menyimpan data tersebut setiap waktunya dan memberikan kondisi terkini dari putaran sudu turbin angin.
Tujuan yang ingin dicapai adalah menghasilkan perangkat sistem pengukuran serta perekam data yang efektif dan efisien,dalam pengertian memiliki fungsi yang optimum yaitu
mempunyai kapasitas data yang cukup besar dan memiliki sisi kepraktisan dalam penggunaan.
2. TINJAUAN PUSTAKA
Nur Rohman (2005) dalam penelitiannya merancang bangun sensor cup-anemometer, wind
vane yang berbasis optocouler dengan phototransistor sebagai penerima cahaya dan infrared sebagai pemancar cahaya. Rancangan alat pengukur kecepatan angin ini dibuat untuk menghasilkan 10 pulsa tiap putaran cup. dari hasil pengujian untuk memperolaeh nilai konversi sensor kecepatan angin didapatkan rata-rata cacah pulsa tiap 10 detik dengan kecepatan angin 1,1 meter/detik sebagai hasil pengukuran sebelumnya dengan anemometer pembanding, sebesar 99,7 pulsa/10 detik = 9,97 pulsa/detik. Standart deviasinya adalah sebesar 7,66007 pulsa/detik. Dengan rasio penyimpangan putaran cup sebesar 7,68%[1].
Menurut penelitian yang dilakukan oleh Akur Prihartanto(2012) tentang perlu adanya suatu alat untuk melakukan pemantauan performa dari sistem PLTS tersebut agar dapat dijadikan sebagai acuan dalam melakukan evaluasi dan pemeliharaan sistem. Salah satu bagian yang penting dari sistem yang perlu dipemantauan adalah performa Solar-
PV yang merupakan inti dari sistem PLTS. Penelitian ini adalah melakukan perancangan sebuah sistem yang mampu mepemantauan Solar-

Seminar Nasional Applied Science and Technology Innovation 2012 (ASTECHNOVA 2012) ISSN: 2086-0005
Yogyakarta, 22 November 2012
PV pada sistem PLTS di daerah terpencil. Karena objek permasalahan terletak pada daerah terpencil, maka sistem Data Logger menjadi solusi untuk mengatasi permasalahan pemeliharaan sistem tersebut. Sistem yang dirancang memiliki kemampuan untuk melakukan pengukuran dan penyimpanan data hasil pengukuran disertai data waktu. Parameter yang diukur adalah tegangan dan arus dari Solar-PV. Sedangkan data disimpan dalam memory MMC dengan kapasitas 1 GB. Perancangan data logger yang dihasilkan mampu melakukan pengukuran tegangan dengan rentang 0-25V, resolusi 0,1 V, akurasi 98,7%± 0,4 dan tingkat presisi 2,8%. Sedangkan untuk pengukuran arus memiliki rentang 0-10 A resolusi 0,04 A, akurasi 98,97%± 0,04 dan tingkat presisi 1,21%. Sistem data logger yang dirancang mampu mengumpulkan 31.395.840 data pengukuran disertai waktu dan memory penuh dalam waktu 726 hari untuk pengambilan data setiap detik selama 12 jam setiap hari[2].
3. DASAR TEORI
3.1 Sistem Pembangkit Listrik Tenaga Angin
Teknologi dalam merubah gerak kinetik angin adalah teknologi yang sudah dipakai sejak ribuan tahun silam. Biasanya disebut sebagai penggilingan angin (wind mills). Wind mills dahulu digunakan untuk menggiling biji-bijian atau memotong kayu. Sekarang wind mills telah berubah
menjadi turbin angin yang digunakan dalam pembangkitan energi listrik.[3]
Sistem komplit dalam merubah dari enegi angin ke energi listrik disebut wind energy
convertion system (WECS). Skema inti dari WECS ditunjukkan pada gambar 3.1.
Gambar 3.1. Wind Energy Convertion System (WECS) [3]
Salah satu tipe dari turbin yang sering
digunakan adalah tipe horizontal. Disebut tipe horizontal karena rotor dari turbin tersusun sejajar dengan tanah oleh karena itu juga horizontal dengan aliran angin. Sistem komponen dari turbin angin ditunjukkan oleh Gambar 3.2 [4].
Gambar 3.2.Sistem Komponen Turbin Angin [4]
1. Rotor Rotor adalah tempat pisau kincir (blade) berada. Blade pada rotor mempunyai bentuk yang aerodinamis. Ketika angin menabrak blade, maka blade akan memutar poros yang terhubung ke generator. Blade harus kuat, ringan, dan tahan
lama. Biasanya blade dibuat dari komposit fiberglass yang diperkuat plastik atau kayu.
2. Generator Fungsi generator adalah membangkitkan listrik. Ketika terjadi putaran maka akan menyebabkan perubahan fluks medan magnet sehingga

Seminar Nasional Applied Science and Technology Innovation 2012 (ASTECHNOVA 2012) ISSN: 2086-0005
Yogyakarta, 22 November 2012
membangkitkan gaya gerak listrik. Listrik yang dihasilkan berupa Direct Current (DC) atau Alternating Current (AC). Pada skala kecil biasanya generator menghasilkan arus AC dan disimpan ke baterai.
3. GearBox
Turbin diatas 10KW biasanya menggunak gearbox untuk meningkatkan putaran poros. Sedangkan turbin dibawah itu biasanya tidak dilengkapi dengan gearbox.
4. Yaw System
Yaw sistem berfungsi sebagai penyeimbang turbin. Yaw sistem akan mengarahkan rotor tegak lurus dengan arah angin. Untuk sistem kecil biasanya dengan menambahkan ekor pada turbin.
5. Sistem Peringatan dan kendali Digunakan untuk melindungi sistem yang turbin angin. Sistem berupa regulator baterai, pengendali yaw system, sikring pada inverter, dan lain-lain. Biasanya sistem ini berada pada ruang kendali.
3.2 Optocoupler
Menurut bahasa, opto berarti cahaya dan coupler
adalah pemicu. Sehingga optocoupler dapat diartikan device yang bekerja dengan pemicu cahaya. Optocoupler terbagi menjadi dua bagian yaitu: a. Receiver
Receiver atau penerima adalah komponen yang peka terhadap cahaya, seperti photodiode dan phototransistor.
b. Transmitter
Transmitter terdiri dari pemancar cahaya yang menjadi picu dalam sistem optocoupler. Cahaya ini yang ditangkap oleh receiver.
Prinsip kerja dari optocoupler adalah jika antara LED dengan photodiode terdapat penghalang maka photodiode akan off sehingga keluaran akan berlogika high. Sedangkan jika tidak ada penghalang antara LED dan potodioda maka photodiode akan on dan membangkitkan sinyal low. Gambar 3.3 menunjukkan komponen dari optocoupler.
Gambar 3.3 Skema Komponen dari Optocoupler
Pemasangan dari optocoupler pada sistem pengukuran kecepatan turbin diadopsi dari
tachometer digital berbasis optik seperti ditunjukkan oleh Gambar 3.4.
Gambar 3.4. Skema Pengukuran
3.3 Mikrokontroler
Atmega16 memiliki fitur yang cukup lengkap seperti 16KB Flash yang bisa di baca dan tulis, 512 byte EEPROM, 1KB SRAM, 32 input dan output, 3 timer dengan berbagai mode kerja, Analog Digital
Converter (ADC), serial peripheral interface
(SPI),Pulse Width Modulation (PWM) dan lainnya. Mikrokontroller ATMega16 memiliki arsitektur harverd, yaitu memisahkan memori untuk program dan memori untuk data sehingga dapat memaksimalkan unjuk kerjanya. Instruksi dalam memori program dieksekusi dalam satu alur tunggal, dimana pada saat satu instruksi dikerjakan instruksi berikutnya sudah diambil dari memori program. Konsep inilah yang memungkinkan intsruksi– instruksi dapat dieksekusi dalam setiap satu siklus clock [5].
32 x 8 bit register serba guna digunkan untuk mendukung operasi pada Aritmetic Logic Unit
(ALU) yang dapat dilakukan dalam 1 siklus.

Seminar Nasional Applied Science and Technology Innovation 2012 (ASTECHNOVA 2012) ISSN: 2086-0005
Yogyakarta, 22 November 2012
Gambar 3.5. Blok Diagram ATMega16 [5]
Mikrokontroler atmega 16 memiliki 3 jenis memori yaitu memori program, memori data dan memori EEPROM [5]. a. Memori program (Flash)
Atmega 16 memiliki kapasitas memori program sebesar 8 Kbyte dimulai dari alamt 0000h sampai 1FFFh dengan masing-masing alamat memiliki lebar data sebesar 16 bit. Memori program ini terbagi menjadi 2 bagian yaitu bagian program boot dan bagian program aplikasi. Jika bagian boot ridak digunakan maka semua kapasitas memori program digunakan untuk program aplikasi. Dalam penggunaannya memori flash dapat di tulis dan dihapus sebanyak 10.000 kali. Pengalamatan memori program ditunjukkan pda Gambar 3.6.
Gambar 3.6. Memori Program (Flash) [5] b. Memori Data
AVR ATmega16 mempunyai memori data yang terbagi menjadi 3 bagian,yaitu 32 register umum, 64 register I/O dan 1K byte SRAM internal. General Purposeregister menempati alamat data paling bawah, yaitu $00 sampai$1Fsedangkan memory I/O menempati 64 alamat berikutnya mulai dari $20hingga $5F. 1024 memory berikutnya digunakan untuk SRAM yaitu padaalamat $60 hingga $45. Berikut Gambar 3.7 menunjukkan konfigurasi memori data ATmega16.
Gambar 3.7 Peta Memori Data
ATMega16
c. Memori EEPROM Atmega 16 memiliki memori EEPROM
sebesar yang terpisah dari memori program maupun memori data. Untuk mengakses memori EEPROM ini diperlakukan seperti mengakses data eksternal sehingga waktu eksekusinya relatif lebih lama bila dibandingkan dengan mengakses SRAM. Konfigurasi pin AtMega 16 ditunjukkan pada Gambar 3.8.
Gambar 3.8 Konfigurasi Pin ATMega16 [5]
3.4 Memori MMC
Multi Media Card (MMC) dalah penyimpan
data yang murah dan mudah didapatkan, yang diaplikasikan pada banyak peralatan seperti kamera digital, handphone dan PDA. Dalam berinteraksi dengan devais yang lain MMC mempunyai protokol sendiri. Namun agar lebih kompatible dengan kontroler yang ada maka ditambahkan mode komunikasi pada MMC yaitu komunikasi Serial
Pheriperal Interface (SPI) [6].
Gambar 9. Konfigurasi Pin SD Card dan MMC[6]
Konfigurasi PIN SDCard atau MMC ditunjukkan
pada gambar 3.14. MMC atau SD card bekerja pada kisaran tegangan 2,7 – 3,6 volt. Konsumsi arus sampai beberapa puluh miliamper. Pada mode komunikasi SPI data yang dikirim atau diterima tetap dan data yang di tranfer sesuai dengan pola komunikasi serial. Komunikasi antara MMC dan mikrokontroler bersifat dua arah.

Seminar Nasional Applied Science and Technology Innovation 2012 (ASTECHNOVA 2012) ISSN: 2086-0005
Yogyakarta, 22 November 2012
3.5 Tabel FAT
Jenis FAT 12,16,32. Fat 12 telah usang karena hanya mampu menyimpan file maksimal kurang dari 16 MB. Sedang kan fat 16 dan 32 masih kerap digunakan. Perbedaan mendasar antara ketiganya adalah ukuran dalam bits setiap entry pada FAT table struktur dalam disk. Pada FAT12 setiap entry table fat berukuran 12-bit, FAT16 berukuran 16-bit dan FAT32 berukuran 32-bit. Dalam memahamai cara kerja FAT terdapat istilah-istilah di dalamnya yaitu sector dan kluster. Sector adalah unit dasar pemetaan dalam suatu memori semua perintah menulis dan membaca ke memori (MMC) dilakukan didalam sektor. Sektor biasanya berukuran 512 byte. Cluster merupakan satuan yang terdiri dari beberapa sektor data.
Secara umum, struktur dari FAT16 terdiri dari Master Boot Record, Partition Boot Record,
FAT Tabel, Root Directory dan Data Region. Dalam sebuah disk bisa terdapat satu partisi atau lebih. Secara keseluruhan, struktur FAT16 dapat ditampilkan dalam Tabel 1.
Tabel 1. Struktur Data pada File System FAT16
Contents Master Boot Record (Amongst other things this specifies the
address of each of the main partitions).
Partition 1 The Boot Record. Located in the first sector of a
partition
FAT table 1
FAT table # (specified by ‘Number of Copies of
FAT’ in master boot record. A value of 2 is
normal)
Root directory
Data area for files and other directories. (This
area occupies the remainder of the disk, or the
space to the start of the next partition).
Partition 2 The Boot Record. Located in the first sector of a
partition
FAT table 1
FAT table # (specified by ‘Number of Copies of
FAT’ in master boot record. A value of 2 is
normal)
Root directory
Data area for files and other directories. (This
area occupies the remainder of the disk, or the
space to the start of the next partition).
4. PELAKSANAAN PENELITIAN
4.1 Perancangan Optocoupler
Sensor optocoupler ini dibagi menjadi dua bagian. Yang pertama adalah pemicu cahaya (coupler). Rangkaian pemicu terdiri dari hambatan R1_330 dan LED. Fungsi resistor sebagai pembatas arus agar tidak merusak LED. Rangkaian yang kedua adalah rangkaian sensor cahaya. Rangkaian sensor cahaya ini adalah penerapan dari pembagi tegangan. Ketika photodiode terkena paparan cahaya maka akan terjadi perubahan resistansi di dalam photodioda. Sehingga dapat dianalogikan seperti variable resistor. Rangkaian pembagi tegangan ditunjukkan Gambar 10.
Gambar 10. Rangkaian Pembagi Tegangan Jadi besarnya tegangan DATA yang dihasilkan
dari pembagian tegangan tergantung dari besarnya resistansi pada R1. Maka di dapatkan rumus 1.
���� � ������_��� ��� …………..………..(1)
4.2 Perancangan Sistem Mikrokontroler Mikrokontroler merupakan bagian penting
dalam sistem data logger yang dirancang. Bagian ini adalah yang mengolah data dan informasi sehingga semua komponen terhubung dengan bagian ini. Pemilihan mikrokontroler juga menjadi penting karena terdapat banyak sekali tipe-tipe mikrokontroler yang ada. Pemilihan mikrokontroler harus disesuaikan dengan kebutuhan sistem yang akan dibangun. Gambar 4.2 memperlihatkan rangkaian sistem mikrokontroler yang didesain menggunakan software Eagle PCB Layout Editor versi 5.11.0.

Seminar Nasional Aplikasi Teknologi Informasi 2009 (ASTECHNOVA 2009) ISBN: 979-756-061-6
Yogyakarta, 20 Juni 2009
Gambar 11. Rangkaian Sistem Mikrkontroler
4.3 Perancangan Perangkat Lunak
Mikrokontroler adalah programable chip. Agar dapat mengolah daya maka mikrokontroller harus di program terlebih dahulu. Dalam memprogram ATMega16 diperlukan compiler untuk menterjemahkan bahasa pemrograman ke hexadesimal. Salah satu compiler yang mudah dalam penggunaannya adalah Code Vision AVR. Di dalam software CV AVR dilengkapi dengan library untuk memudahkan dalam melakukan pemrograman. Selain itu, CodeVision AVR juga dilengkapai dengan Tool Wizard yang membantu membuat program inisialisasi penting pada mikrokontroler AVR. Compiler ini mendukung listing program dengan
bahasa C. Bahasa C merupakan bahasa pemrograman tingkat menengah yang cukup mudah untuk dimengerti. Alasan penggunaan CV AVR sebagai compiler dalam merancang sistem ini juga dikarenakan penulis menggunakan bahasa pemrograman C. Bahasa C termasuk dalam bahasa pemrograman tingkat menengah, sehingga lebih mudah dipahami dibandingkan bahasa pemrograman tingkat rendah seperti assembly. Agar dapat mengunduh program dari PC menuju mikrokontroler melalui Universal Serial Bus (USB) maka dibutuhkan downloader. Downloader yang digunakan adalah AVR ISP mk II. Algoritma perangkat lunak ditunjukkan Gambar 12.

Seminar Nasional Aplikasi Teknologi Informasi 2009 (ASTECHNOVA 2009) ISBN: 979-756-061-6
Yogyakarta, 20 Juni 2009
Gambar 12. Diagram Alir Perangkat Lunak
5. HASIL DAN PEMBAHASAN
5.1. Kalibrasi
Kalibrasi sensor cahaya atau optocoupler dilakukan dengan menghitung cacahan perdetik yang ditangkap / diterima dan membandingkan dengan hasil yang di dapatkan tachometer standar. Tachometer yang digunakan adalah merek Lutron tipe DT-2236. Pengukuran dilakukan sebanyak 8
kali untuk tiap masukan. Dari data tersebut didapatkan nilai rata-rata dan standar deviasinya. Perbandingan antara nilai rata-rata yang dihasilkan tachometer standar dibandingkan dengan tachometer data logger. Perbandingan keduanya menghasilkan persamaan y = 59,63x+4,97 yang berarti gain sebesar 5,63 dan faktor koreksi sebesar 4,97 dengan koefisien deteminasi sebesar 0,999. Hasil grafik kalibrasi ditunjukkan oleh Gambar 5.1.
Gambar 5.1. Grafik Hasil Kalibrasi
Seminar Nasional Aplikasi Teknologi Informasi 2009 (ASTECHNOVA 2009) ISBN: 979-756-061-6
Yogyakarta, 20 Juni 2009
Menghitung besarnya penyimpangan antara kalibrator dan alat ukur dengan rumus 2.
���%� � �����������������
� ������� �!�� " ���!�����!� � 100% …… . �2�
dan didapatkan RP rata – rata sebesar 1,16% .
5.2. Analisa Akurasi dan Presisi
Akurasi menyatakan harga terdekat dari pembacaan sebuah instrumen untuk variable yang diukur terhadap nilai sebenarnya. Akurasi dapat dihitung dari ketidakakuratan [8]. Ketelitian dikutip sebagai persentase yang didasarkan pada pembacaan skala penuh instrumen [9]. Nilai ketidakakuratan dapat ditentukan dari penyimpangan atau bias antara kalibrator dan alat yang dikalibrasi. Sehingga didapatkan bias rata-rata absolutnya sebesar 15,33 rpm. Sehingga didapatkan nilai ketidakakuratan seperti ditunjukkan oleh persamaan 3.
�(�)� � �!�(�� �
*+,-.,/,0.,/,,*-123/-4,2,5673856793:+,7 100%……………………(3)
Nilai akurasi dapat ditentukan dengan
persamaan4.
� �!��� � 100% " �(�)� � �!�(�� …........(4) Sehingga nilai dari ketidakakuratannya
(15,33/6784)100% = 0,23% dan nilai akurasinya sebesar 100% - 0,23% = 99,77%.
Presisi menyatakan tingkat kesamaan hasil pembacaan dalam sekelompok pengukuran yang dilakukan pada kondisi yang sama. Semakin kecil nilai standar deviasi menandakan semakin besar peluang mendekati nilai rata-ratanya [doeblin]. Dengan asumsi hasil pengukuran terdistribusi normal, untuk tingkat kepercayaan 95% nilai pengukuran dapat ditentukan dengan ± 2s dengan dan s seperti ditunjukkan rumus 5 dan 6 [9].
� ∑ =>?>@A7 ………………………….(5)
� � B∑ �=A0=�C?>@A70� ……………………(6)
Sehingga didapatkan standar deviasi rata-rata sebesar 7,97 dan untuk tingkat kepercayaan 95% tingkat presisinya adalah ± 15,92 rpm.
5.3. Analisis Penggunaan Memori
Berikut merupakan formula perhitungan untuk kapasitas waktuk penyimpanan data pada MMC. Hal ini dimaksudkan sebagai saran bahwa penggunaan MMC berkapasitas MegaByte saja, dapat menampung sejumlah data dengan waktu yang
cukup lama.
( � DE� FGH�A+ I 60 24L ……………….(7)
X = Kapasitas waktu untuk menyimpan data pada MMC (hari) M = Kapasitas memori pada MMC 512 = Kapasitas per sektor (address) pada
MMC (byte)
i = nilai interrupt timer yang diberikan pada sistem
60(1) = jumlah detik per menit 60(2) = jumlah menit per jam 24 = jumlah jam per hari Pemakaian Memori sebesar 512 MB dengan laju
penyimpanan data setiap 10 detik maka didapatkan kapasitas waktu untuk menyimpan selama 115 hari dengan pengambilan data selama 24 jam terus menerus.
5.4. Hasil Pengujian dengan Turbin Angin 1kW
Spesifikasi turbin angin kapasitas 1 kW yang
diteliti adalah sebagai berikut: 1. Jumlah sudu 3 2. Diameter sudu 1,5 m 3. Tipe generator 240 VAC 3 fase 4. Kecepatan putaran 300 rpm 5. Sistem pengarah plat ekor 360o 6. Berat Generator 25 kg 7. Kecepatan start 3 m/s 8. Kecepatan nominal 12 m/s 9. Kecepatan cut off 24 m/s
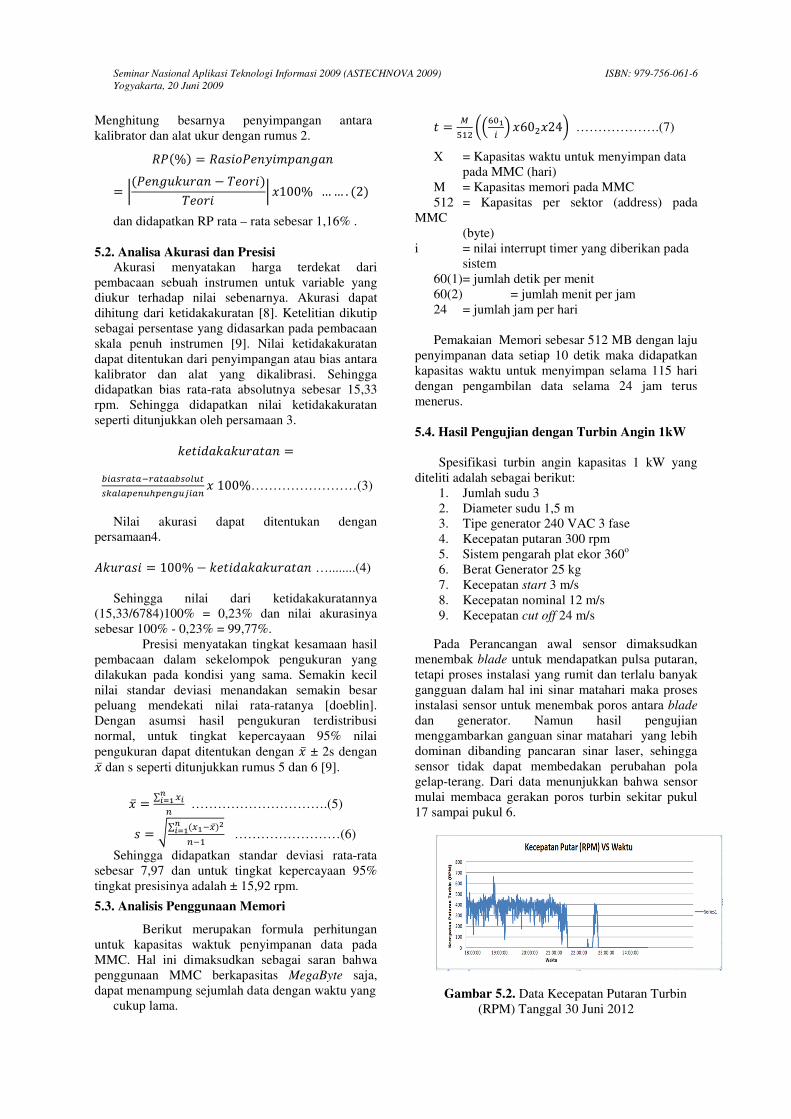
Pada Perancangan awal sensor dimaksudkan menembak blade untuk mendapatkan pulsa putaran, tetapi proses instalasi yang rumit dan terlalu banyak gangguan dalam hal ini sinar matahari maka proses instalasi sensor untuk menembak poros antara blade
dan generator. Namun hasil pengujian menggambarkan ganguan sinar matahari yang lebih dominan dibanding pancaran sinar laser, sehingga sensor tidak dapat membedakan perubahan pola gelap-terang. Dari data menunjukkan bahwa sensor mulai membaca gerakan poros turbin sekitar pukul 17 sampai pukul 6.
Gambar 5.2. Data Kecepatan Putaran Turbin (RPM) Tanggal 30 Juni 2012

Seminar Nasional Applied Science and Technology Innovation 2012 (ASTECHNOVA 2012) ISSN: 2086-0005
Yogyakarta, 22 November 2012
Gambar 5.3. Data Kecepatan Putaran Turbin (RPM) pada Tanggal 1 Juli 2012
Gambar 5.4. Data Kecepatan Putaran Turbin (RPM) pada Tanggal 2 Juli 2012
Gambar 5.5. Data Kecepatan Putaran Turbin (RPM) pada Tanggal 3 Juli 2012
5.5. Rancangan Perbaikan Instalasi pada Turbin
Ketidaksempurnaan instalasi pada turbin mempunyai pengaruh yang sangat signifikan terhadap hasil pengukuran Ketidaksempunaan ini disebabkan kurangnya perhitungan gangguan matahari terhadap pemicu cahaya (laser) dan kesulitan dalam memasang alat pada turbin yang berada di atas menara dengan ketinggian 15 meter. Penambahan isolator cahaya adalah salah satu rancangan perbaikan instalasi seperti ditunjukkan Gambar 5.6 dan 5.7.
Gambar 5.6 Rancangan Perbaikan Instalasi
Tampak Samping
Gambar 5.7 Rancangan Perbaikan Instalasi Tampak Depan (Blade Diabaikan)
Gambar 5.8 Diagram Pemasangan Alat
V.8 Rancangan Perbaikan pada Elemen Perasa
atau Optocoupler
Optocoupler adalah elemen perasa yang berbasis cahaya yang terdiri dari pengirim cahaya serta penerima cahaya. Salah satu masalah terbesarnya adalah derau dari sumber cahaya luar

Seminar Nasional Applied Science and Technology Innovation 2012 (ASTECHNOVA 2012) ISSN: 2086-0005
Yogyakarta, 22 November 2012
seperti lampu dan matahari. Penyelesaian dari masalah ini salah satunya adalah dengan mengirim pulsa cahaya infra merah dengan frekuensi tertentu dan membangun penerima cahaya yang hanya menerima cahaya pada frekuensi yang sama dengan memotong frekuensi diatas atau dibawah frekuensi cahaya dari pengirim cahaya. Pemotongan frekuensi tersebut dengan menambahkan filter.
Ada banyak jenis sensor di pasaran, salah satunya adalah modul penerima infra merah seperti yang ditunjukkan Gambar 5.9(a). modul sensor Infra merah tersebut sudah dilengkapi dengan filter dan regulator tegangan. Sensor ini biasanya tanggap pada frekuensi 40 kHz.
(a) (b)
Gambar 5.9 Sensor Infra Merah (a) fisik IR (b) Cara Kerja [10]
Proses dimana modul infra merah mendeteksi frekuensi 40 kHz di tunjukkan oleh Gambar 5.9(b). Cahaya dengan frekuensi 40 kHz dibangkitkan oleh pengirim cahaya menumbuk objek dan dipantulkan dengan sinyal yang lebih lemah namun pada frekuensi yang sama melewati IR-PASS filter dan diterima oleh fotodioda. Demikian juga cahaya matahari dan sumber cahaya lainnya akan melewati IR-PASS filter dan hanya bisa dilewati oleh infra merah sehingga cahaya tampak tidak dilewatkan. Pada tahap ini cahaya yang diterima oleh fotodioda masih memiliki derau. Kemudian derau tersebut difilter untuk didapatkan cahaya pada frekuensi 40 KHz saja serta ditingkatkan sinyalnya oleh amflifier sehingga didapatkan tegangan keluaran 0 atau 5 volt.
Perancangan sistem elektronika dari
optocoupler dengan modul infra merah ini ditunjukkan dalam Gambar 5.10. Sensor terdiri dari pengirim dan penerima. Rangkaian penerima tersusun atas 4 gerbang NAND dan transistor 2N2222A dan led infra merah. Dua gerbang NAND yang pertama bertindak sebagai osilator untuk membangkitkan sinyal infra merah pada frekuensi 40 kHz. Dua gerbang lainnya berfungsi sebagai enable dan disable dari pengirim cahaya. Potensio R1 berfungsi sebagai pengatur arus yang masuk ke dalam LED. Potensio R2 bertindak sebagai pengatur frekuensi. Untuk rangkaian penerima dilengkapi dengan low pass RC filter, C2 dan R6 berfungsi
untuk mereduksi derau yang disebabkan oleh pemakaian supply yang sama antara pengirim dan penerima [10].
Gambar 5.10 Rangkaian Pengirim dan Penerima
Cahaya [10]
I. Kesimpulan dan Saran
VI.1. Kesimpulan
1. Sistem data logger mampu bekerja dengan baik dengan media penyimpanan data berupa MMC dengan kapasitas 512 GB. Data disimpan dalam format txt dan mampu ditampilkan pada sistem operasi Windows menggunakan software Notepad.
2. Sistem pengukuran tidak dapat digunakan pada siang hari karena gangguan cahaya matahari.
3. Pemakaian laser lebih sensitif dibandingkan LED karena lebih terfokus.
4. Penyimpangan rata-rata sebesar 0,51% pada pengujian 1 sudu.
5. Resolusi sebesar 59,63 RPM.
VI.2. Saran
Hasil perancangan sistem pengukuran RPM masih memerlukan penyempurnaan agar dapat diperoleh fungsi yang lebih optimal. Saran untuk menyempurnakan sistem yang dibuat antara lain : 1. Penggunaan Sensor Berbasis magnetik dan
ultra sonik agar tidak terpengaruh sinar matahari.
2. Merancang sistem dengan resolusi yang lebih tinggi, untuk basis cahaya maka semakin banyak pola gelap terang semakin bagus.
3. Media penyimpan data dikembangkan dari MMC pada perancangan ini menjadi media yang mampu menampung file lebih besar dan lebih praktis seperti USB (Unit Serial Bus).

Seminar Nasional Applied Science and Technology Innovation 2012 (ASTECHNOVA 2012) ISSN: 2086-0005
Yogyakarta, 22 November 2012
DAFTAR PUSTAKA
[1] Rohman Nur, 2005, Skripsi: Anemometer Digital
Berbasis Mikrokontroler AT89S8252, Jurusan Teknik Fisika Fakultas Teknik UGM, Yogyakarta.
[2] Prihartanto Akur, 2012, Skripsi: Perancangan Data
Logger Untuk Pemantauan Daya Keluaran Solar
Photovoltaic pada Sistem Pembangkit Listrik Tenaga
Surya Menggunakan Memori Multi Media Card, Jurusan Teknik Fisika Fakultas Teknik UGM, Yogyakarta.
[3] Verdonschot M.J.,2009, Modeling and Control of Wind
Turbines Using a Continuously Variable Transmission, Department Mechanical Engineering, Eindhoven University of Technology.
[4] Naturaal Resource Canada, 2003, Stand-Alone Wind
Energy Systems: A Buyer’s Guide, Canada. [5] Atmega16 Datasheet. Data Teknis, Atmel, 2002. [6] How to use MMC/SDC. http://elm-
chan.org/docs/mmc/mmc_e.html,16Juni 2011 [7] MMC / SD Memori Card FAT16 / FAT32 Driver
Technical Manual. Data Teknis, Embedded-code.com. [8] Fraden Jacob. Handbook of Modern Sensors. New York,
2010. [9] Doeblin Ernest O. Measurement System. Mc Graw-Hill,
New York, 1993 [10] Kamal Ibrahim. Infra-Red Proximity Sensor Part 2.
Diakses dari http://www.ikalogic.com/infra-red-proximity-sensor-part-2/