proyecto: laboratorio de
TRANSCRIPT

PROYECTO: LABORATORIO DE MECANISMOS
VOLUMEN I
CARLOS A. CATACHUNGA M.
PEDRO J. CARREÑO G.
Trabajo de Grado presentado como requi-sito parcial para optar al título deIngeniero Mecánico.
Director: Ing. DIEGO LUIS CARABALI
Unrvrrsidrx{ dutoncmo de 0ccidmte
0eoro $rbiideco
36 6 ? -l'CORPORACION AUTONOMA DE OCCIDENTEDIVISION DE INGENIERIA
PROGRAMA INGENIERIA MECANICACALL 1983 \*
-\-
CN\-(\i .)
e1",(-l["l-
r8f rrufirillü]ürfifiuurrl

rá¿/ ,! i¿ ¿Q -¡si-
Aprobado por el Comité de Trabajo de Grado
designado en cumplimiento de los requisitos
exigidos por la Corporación Autónoma de
Occidente para otorgar el título de Ingeniero
Mecánico.
Presidente del Jurado
Jurado
Jurado
Cali, Enero 1983.
1l

TABLA DE CONTENIDO
VOLUMEN I
INTRODUCCION
1. DISEÑO DE ESTRUCTURA O SOPORTE
1. 1 DIMENSIONES
L.2 CALCULO DEL PESO DE LA ESTRUCTURA
1.3 ANALISIS POR COMPRESION
1.3.1 Punto de Tangencia
1.3.2 Coeficiente de Esbeltez
1.4 CALCULO DE CARGA CRITICA (PeT)
1.5 CALCULO DEL FACTOR DE SEGURIDAD (Fs)
1.6 ANALISF POR FLEXION
1.6.1 CáIcuIo de Reacciones
1.6.2 Cálculo de la Fuerza Cortante Vertical (V)
1.6.3 Cálculo de Momento Flector Máximo (M)
t.6.4 Cálcu1o de Ia Flecha Máxima
2. DISEÑO DEL EJE
pag.
1
3
4
5
6
7
I
9
10
10
11
11
t2
L2
13

2.T LOS MOMENTOS DE TORSION TRANSMITIDOPOR LA POLEA EN V Y LA POLEA PLANA
2.2 CALCULO DE LA FUERZA DE FLEXION PRO-DUCIDA POR LAS CORREAS EN V Y PLANA
2.3 CALCULO DEL VALOR DE LAS REACCIONES
2.4 CALCULO DE MOMENTOS EN CADA PUNTO
2'.F: CALCULO DE ESFUERZO DE CIZALLADORA
2.6 CALCULO DE ESFUERZOS PRINCIPALES
2.7 CALCULO DE ESFUEP'ZO ALTERNANTE
2.8 CALCULO DEL LIMITE DE FATIGA
3. TRANSMISION
S.lSELECCION DEL MOTOR
3.2 SELECCION DE POLEAS EN V
3.3 CALCULO DE VELOCIDAD Y DISTANCIA ENTRECENTROS DE CADA EJE
3.4 SELECCION DE TIPO DE CORREA
3.4. 1 Potencia de Diseño
3.4.2 Cálculo de RPM conductora y conducida
3.4.3 Cálculo ángulos de Contacto de Poleas
3.4.4 Longitud de la Correa en V.
pag.
t4
L4
15
15
16
16
L7
18
23
23
24
28
30
30
30
31
32
1V

3.4.5 Velocidad de la Correa
3.4.6 Potencia Nominal por Correa
3.4.7 Potencia Nominal Corregida
3.4.8 Cálculo de Fuerza que ejerce Ia Correa
3.4.9 Duración de la Correa
3.4. 10 Tiempos de Duración de la Correa en Horas
3.4. 11 Fuerza en Rodamientos debido a la Correa
3.5 SELECCION DE POLEAS PLANAS
3.6 SELECCION DE BANDAS O CORREAS PLANAS
3.6.1 Potencia de Diseno
3.6.2 Cálculo de RPM conductora y Conducida
3.6.3 CáIculo de ángulos de Contacto de poleas
3. 6.4 Cálculo de Longitud de la Correa plana
3. 6. 5 Velocidad de la Correa plana
3.6.6 Potencia Nominal de la Correa
3.6.7 Potencia Nominal Corregida a potencia Real
3.6.8 Fuerzas que ejerce la Correa
3.7 SELECCION DE PIÑONES PARA CADENA
3.7.1 Pnazín entre Rueda Motriz y Rueda Accionada
3.7.2 Paso de la Cadena y Velocidad de la Rueda
3. 7.3 Chequeo de Selección de la Rueda por RpM
pag.
34
34
37
40
4t
42
43
43
44
45
46
46
47
4B
48
48
49
52
53
53
54

3.7 .4 Tipos de Ruedas
3. 7.5 Diámetros de las Ruedas de Cadena
3.7.6 Distancia entre Centros de las Ruedas
3.7.7 Chequeo de Distancia entre Centros
3.7.8 Ruedas Locas
3.?.9 Materiales para las Ruedas de Cadena
3.8 VERIFICACION O CHEQUEO DE SELECCIONDE CADENA
3. 8. 1 Velocidad Lineal de la Cadena
3.8.2 Potencia que puede Transmitir la Cadena
3.8.3 Cálcu1o de Ia potencia de Diseno
4. DrSEñO CAJA DE VELOCTDADES 64
4. 1 CALCULO DE POTENCIA PARA MOVER LACAJA DE VELOCIDADES 65
4.2 CALCULO DEL DIAMETRO PRIMITIVO DELPrñoN A. 65
4.2.t Cálculo de Velocidad del piñón A. 6b
4.2.2 Cálculo de la Fuerza Tangencial del piñón A. 66
4.2.3 cálculo de carga ]Dinámica o Real del piñón A. 66
4.2.4 CáIculo del paso circular del pinón A. 66
4.2.5 Valores de Factor de Forma del piñón A 66
4.2.6 Límite de Fatiga Recomendado 66
pag.
54
55
57
CI
57
58
59
59
61
62
V1

4,2,7 CáIculo del Espesor del Diente A.
4.2.8 Cálculo Carga Diseño Piñón A
4.3 RPM DE LA RUEDA B y PrñON C.
4.3.1 Diámetro Primitivo de la Rueda B.
4.3.2 Carga de Diseño de Ia Rueda B.
4.3.3 Límite Fatiga Recomendado
4.4 DIAMETRO PRIMITIVO DEL PIÑON C.
4.4.I Fuerza Tangencial del Piñón C.
4.4.2 Carga Dinámica del Pinón C.
4.4.3 Carga del Diseño del Piñón C.
4.5 RPM DEL PIñON D y E.
4.5.1 Diámetro Primitivo y Velocidad Tangencialdel Piñón E.
4.5.2 Fuerza Tangencial de E.
4.5.3 Carga Dinámica de E.
4.5,4 Carga de Diseño de E.
4.6 RPM DEL PIÑON F.
4.6.I Fuerza Tangencial del Piñón F.
4.6.2 Carga Dinámica
4.6.3 Carga de Diseño
4.7 TENSION DE FLEXION POR LA AGMA EN UNDIENTE
pág.
67
68
6B
68
68
68
69
69
69
69
70
70
70
70
7L
7t
7L
7l
72
72
vI1

4.8 RESISTENCIA A LA FLEXION DE LOS DIE}ITESSEGUN LA AGMA
4.9 TENSION DE CONTACTO SUPERFICIAL SEGUNLA AGMA
4. 9. 1 Resistencia Superficial
4.TO DATOS PARA CONSTRUCCION DE PIÑONES
4.t0.1 Datos para Piñón A.
4.t0.2 Datos para Piñones B y D
4.10.3 Datos para Piñones C y F
4.TL CALCULO DE REACCIONES SOBRE LOS SOPOR-PORTES DE CHUMACERAS 78
4.12 DIAGRAMAS DE ESFUERZO CORTANTE EN LOS
pag.
73
73
74
75
76
76
77
81
82
B4
B4
B6
8B
90
90
92
93
EJES DE LA CAJA DE VELOCIDAD
4.13 PROYECTO DEL CUBO DE PIÑON
5 FRENO
5.1 TIPO DE FRENO
5.2 CALCULO DE FUERZA DE TRABAJO
5.3 MOMENTO DE FUERZAS NORMALES
5.4 CALCULO DE LA CAPACIDAD DE FRENADO
5.4.t Capacidad de Frenado en Zapata lado Derecho
5.4.2 Capacidad de Frenado en la Zapata lado Iz-quierdo
5.5 CALCULO DE LAS REACCIONES EN EL PINDE LA ZAPATA CON RESPECTO AL EJE Y.
¡iii

5.5.1 Cálculo de la Reacción Total
6. ENGRANAJES HELICOIDALES
6.1 TIPOS DE ENGRANAJES HELICOIDALES
6. 2 RELACIONES CINEMATICAS.CARACTERISTICASDE ESTOS ENGRANAJES
6.3 RESISTENCIA DE LOS DIENTES
6.4 CARGA DINAMICA
pág.
94
96
96
97
oo
99
7. CONJUNTO CORONA SIN-FIN
7.1 ANALIS6 DE FUERZAS DELTORNILLO SIN-FIN
7,2 CAPACIDADES DE POTENCIAMO DE TORNILLO SIN-FIN
MECANISMO
DE UN MECANIS.
100
105
111
119
L22
L22
L23
B. MECANISMO:.MANIVELA-BIELA.CORREDERA 119
8.1 CALCULO DE VELOCIDADES POR MEDIO DELPOLIGONO DE VELOCIDADES
8.2 CALCULO DE VELOCIDADES ANGULARES
8.3 CALCULO DE ACELERACIONES POR POLIC.ONODE ACELERACIONES
8. 4 RELACIONES CINEMATICAS ANALITICAS
9. ENGRANAJES CONICOS RECTOS T26
9.1 TERMINOLOGIA DE LOS ENGRANAJES CONICOS T26
UnivtniCod ¡1rt0n0m0 de lktido¡rtc
Deoro BrflrPts¡¡

9.2 DIMENSIONES DEL PIÑON Y LA RUEDA
9.3 SELECCION APROXIMADA DE LAS DIMENSIO-NES
9.4 CALCULO DE LA CARGA DINAMICA
9.5 CALCULO DE LA TENSION DE FLEXION
9.6 RESISTENCIA A LA FLEXION
9.7 CALCULO DEL COEFICIENTE DE SEGURIDAD(N)
9.8 DURACION DE LA SUPERFICIE
10. ACOPLAMIENTOS
10.1 INTRODUCCION
10. 2 ACOPLAMIENTOS RIGIDOS
10.2.1 De Platos
L0.2.2 De Compresión
L0.2.3 Tipo de Mordaza
L0.2.4 Tipo de Bridas
tfl.2.5 Junta Cardánica
10. 3 ACOPLAMIENTOS FLEXIBLES
10.3.1 Objetivos de los Acoplamientos Flexibles
10.3. 2 Condiciones que debe tener un buen Acopla-miento
10.3. 3 Acoplamiento Flexible de Corona de Pernos
x
131
t32
pag.
r27
t27
t28
130
131
135
135
r37
139
t40
L41
t4L
t44
L45
t46
t46
t47

10. 3. 4 Acoplamiento Flexible Renold
10. 3. 5 Acoplamiento Flex-Hold
10.3.6 Acoplamientos de Cruceta
10.3.7 Acoplamiento Tipo Stoel Flex
10.4 ALINEACION DE ACOPLAMIENTOS
L0.4.1 Con Ayuda de una Plomada
L0.4.2 Con Ayuda de una Batería
t0.4.3 Con Ayuda de las Láminas
10.4.4 Con Ayuda del Verüicador
Ny
de la
Ntt
Figura
pág.
149
t49
151
L52
161
t62
t62
163
165
16?
16?
167
168
t7r
173
173
t75
18?
11. LEVAS
11.1 ELEMENTOS DE UN MECANISMO DE LEVAS.FUNCIONES E IMPORTANCIA
11.1.1 Elementos de un Mecanismo de Levas
TL.z DIAGRAMAS DE DESPLAZAMIENTO
11.3 MOVIMIENTOS DEL SEGUIDOR UTILIZADOSPARA EL DISEÑO ON LEVAS
11.4 COMPARACION DE LOS MOVIMIENTOS DELSEGTIIDOR
11.4. 1 Comparación de las Características Cinemáti-cas
11. 5 MOVIMIENTO POLINOMICO
11.6 OBTENCION GRAFICA DE LA SUPERFICIE DETRABAJO DE LA LEVA
x1

11.7 ANGULO DE PRESION
11. 7. 1 Definición
tL.7.2 Análisis de fuerzas y Máximo ángulo de pre-sión permisible
11. ?.3 Métodos para reducir el Angulo de Presión
IL.7.4 Cálculo del Angulo de Presión
11.8 TAMAÑO DE LA LEVA
11. B. 1 Radio de Curvatura del perfil de la Leva
11.9 CLASES ESPECIALES DE LEVAS
11.9.1 Levas Inversas
11.9.2 Cruz de Malta
BIBLIOGRAFIA
ANEXOS
VOLUMEN I I
MANUAL DE PRACTICA
PRACTICA 1. Montajes Manivela-Biela-Corredera
PRACTICA 2. Montaje y Alineamiento de Poleas Planas
F}RA CTTCA 3. Montaje y Alineación de Poleas en V.
PRACTICA 4. Montaje de Engranajes de Dientes Rectos
pRACTICA 5. Montaje de Engranajes cónicos Rectos
xii
pág.
194
194
194
197
20L
205
205
208
208
2LO
215

PRACTICA 6. Montaje de Piñones de Cadena
PRACTICA 7. Montaje de Piñones de Cadena
PRACTICA 8. Montaje de Piñones Helicoidales con Ejesque se cl.vzarl
PRACTTCA 9. Frenos
PRACTICA 10. Construcción de Mecanismos (Mecanismo deMalta, Levas y Seguidores)
PRACTICA 11. Montaje de Acoplamientos
x111

FIGURA
F'IGURA
FIGURA
FIGURA
FIGURA
FIGURA
FIGURA
FIGURA
FIGURA
FIGURA
FIGURA
FIGURA
FIGURA
LISTA DE FIGURAS
1. Ejes de Trabajo en Perfil Angular
2. Pórtico de Estructura
3. Curvas Euler-Johnson
4. Viga Apoyada en los Extremos
5. Diagrama de Momentos
6. Asiento de Correa en Canal
7. Fuerzas que actúan sobre la Correa
8. Tipos de Ruedas
9. Esquema Caja de Velocidades
10. Freno de Zapata de Acción Externa
11. Diagrama Cinemático
12. Fuerzas que ejerce Ia rueda sobre eITornillo Sin Fin
13. Componentes de Velocidad en un Meca-nismo Sin Fin
pág.
5
6
9
11
13
25
4L
55
64
84
97
109
110
FIGURA 14. Valores representativos del Coeficientede Fricción para mecanismos de Sin Fin 111
xiv

FIGURA
FIGURA
FIGURA
FIGURA
FIGURA
FIGURA
FIGURA
FIGURA
FIGURA
FIGURA
FIGURA
FIGURA
FIGURA
FIGURA
FIGURA
FIGURA
FIGURA
FIGURA
15. Dimensiones del Piñón
16. Acoplamientos
1?. Acoplamientos de Compresión con Pestañade Seguridad
18. Acoplamiento de Manguito con Chaveta
19. Acoplamiento de Manguito con Anillos
20. Acoplamiento de Manguito con Tornillo
21. Acoplamiento de Platos
22. Trozo de Arbol de Transmisión, conAcoplamiento de Platos
23. Acoplamiento Rígido de Compresión
24. Acoplamiento de Manguito Partido
25. Acoplamiento de Bridas
26. Acoplamiento de Brida Pernado
27. Junta Cardánica
28. Acoplamiento Flexible Renold
29. Acoplamiento Flex Hold
30. Acoplamiento FIex Hold con Cilindros deCaucho
31. Acoplamiento de Cruceta
32. Acoplamiento Stoel Flex
r28
135
pag.
136
138
138
138
139
139
140
L4l
L42
t44
L45
150
151
153
t54
xv

FIGURA 33. Aplicaciones de Acoplamiento stoel Flex
FIGURA 34. Aplicaciones,de Acoplamiento stoel Flex
FIGURA 35. Anillos de Cierre- Cargas Livianas
FIGURA 36. Anillos de Cierre- Cargas Normales
FIGURA 3?. Desalineación Angular
FIGURA 38. Desalineación Paralela en Plena Acción
FIGURA 39. Desalineación Paralela- carga Máxima
FIGURA 40. Libre Flotación de Extremo
FIGURA 41. Acoplamiento stoel Flex de gran Tamaño
FIGURA 42. Alíneación con Plomada
FIGURA 43. Alineación con Batería
FIGURA 44. Alineación con Láminas
FIGURA 45. Alineación con Láminas
FIGURA 46. Alineación con Verificador
FIGURA 4?. Elementos de un Mecanismo de Levas
FIGURA 48. Leva de Disco- Seguidor Radial
FIGURA 49. Diagrama para obtener Ia superficie de
Leva
FIGURA
FIGURA
FIGURA
Movimiento Uniforme
Movimiento Parabólico
Movimiento Armónico SimPIe
50.
51.
52.
pá9.
156
156
t57
t57
158
159
159
160
161
L62
163
t64
t64
166
168
169
L72
1?3
t74
t74
xvl

FIGURA
FIGURA
FIGURA
FIGURA
FIGURA
FIGURA
FIGURA
FIGURA
FIGURA
FIGURA
FIGURA
53. Movimiento Cicloidal
54. Leva de Disco, Seguidor Radial U.AR.M.
55. Fuerzas y Máximo Angulo de Presión
56. Círculo Base Aumentado
57. Seguidor Excéntrico de Rodillo
58. Diagrama de Desplazamiento
59. Un Dercutting en Levas Pequeñas
60. Leva con Manzan¿
61. Yugo Escocés
62. Leva Inversa
63. Cruz de Malta
pag.
t74
193
196
198
199
203
207
207
209
209
2tt
xvlr

TABLA
TABLA
TABLA
TABLA
TABLA
TA BLA
TABLA 7.
1.
,
3.
4.
5.
6.
LISTA DE TABLAS
Propiedades Típicas de Materiales
Propiedades TíPicas del Núcleo de
Aceros Cementados
Secciones de Correas Recomendadas
Diámetros de Círculo Primitivo en
Milímetros, de las Poleas Normales
Factores de Servicio de Sobre-carga
Longitudes normalizadas de CorreasTrapezoidales norteamericanas constan-tes de potencia
Coeficientes de diámetro pequeño.Coeficientes de Arco de Contacto
Factores de Corrección de Longitud Kt
Coeficientes de Corrección
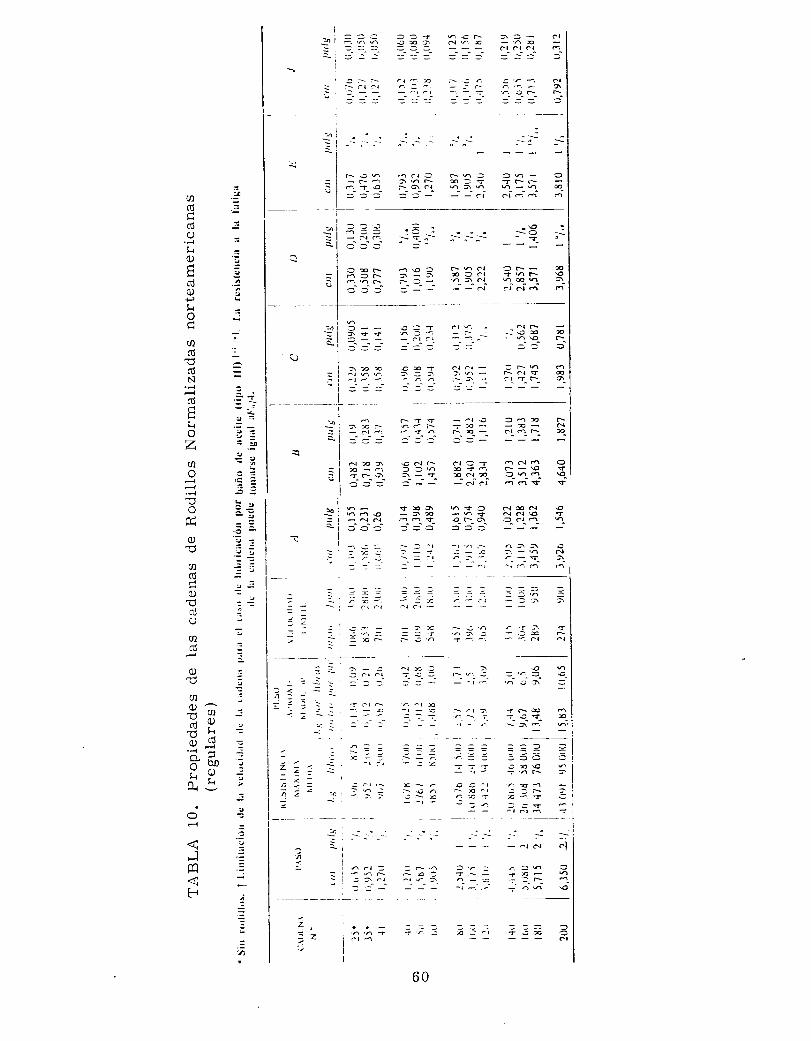
Propiedades de las cadenas de RodillosNormalizadas norteamericanas (regulares)
27
30
pág.
20
2l
26
60
63
85
33
35
38
50
TABLA
TABLA
TABLA
TABLA
TABLA
8.
o
10.
11. Coeficientes de Servicio
L2. Materiales de Fricción para Embragues
xvlll

TABLA 13.
TABLA 14.
TABLA 15.
TA BLA 16.
TABLA L7.
pág.
Factor de Materiales K, para mecanismos115de Tornillo Sin-Fín cilíndrico
Factor de corrección de la relación de116velocidades Km
Factor de VelocidaC Kr, 118
Selección de un Acoplamiento de Bridas 143
Número de caballos y dimensiones paraacoplamientos de corona 148
Universidttrl óul0n0m0 de gccidcnre
Deom 8i¡iislett
xlx

INTRODUCCION
Este proyecto de grado se ha realizado con el objetivo princi-
pal de complementar en forma teórico-práctica los conocimien-
tos adquiridos durante eI desarrollo de nuestra carrera en las
materias de Resistencia de Materiales Diseno Mecánico y Me-
canismos.
Se divide en capítulos que abarcan áreas bien definidas de
cálculo, diseño y prácticas. cada capítulo se inicia con eI es-
tablecimiento de las definiciones correspondientes, junto con
eI material ilustrativo y descriptivo consignado en planos ela-
borados en base a las normas del Dibujo de Ingeniería'
se adiciona en el material informativo los catáIogos de partes
comerciales seleccionadas como perfiles, rodamientos, motor,
bandas; para facilitar Ia identificación de las mismas'
EI conjunto está compuesto de los elementos necesarios tales

como; levas, poleas, bandas, cadena, piñones, ejes, freno,
que permiten alcanzar los objetivos que persigue eI laboratorio.
Para Ia realización de las pruebas correspondientes se elaboró
un Manual de Laboratorio que consigna los pasos a seguir para
asimilar con facilidad todas las variantes de experimentos que
otorga este importante equipo.
La diversidad de pruebas que se pueden realizar y verüicar lo
pueden ejecutar grupos de doce personas, divididos en tres sub-
grupos de cuatro que trabajarán en sus bancos o mesas corres-
pondientes para obtener los resultados que se proponen conseguir.
AI concluir este proyecto orgullosamente presentamos a nuestra
Corporación Autónoma de Occidente, este interesante equipo que
aumentará el material didáctico de los laboratorios que ofrecen
en forma práctica aI estudiante poder comprobar los conocim bn-
tos teóricos adquiridos y tener un buen criterio cuando se halle
comprometido en problemas de mecanismos.

Los diferentes
instalado sobre
1. DISEÑO DE ESTRUCTURA O SOPORTE
mecanismos que componen el laboratorio se han
tres mesas o módulos.
La mesa o módulo No. 1 consta del conjunto de transmisión. so-
bre esta se instalan las poleas y correas en V y planas, como
también piñones para cadena y su cadena. cada transmisión tiene
susrespectivosejesychumacerasquesedesignanEjel,Eje
II, Eje III. de acuerdo a diagramas que se verán más adelante.
También está montado el motor que es el encargado de darle eI
movimiento a todo este conjunto. ( V er Plano 34)
En Ia mesa o módulo No. 2 están instalados la caja de velocida-
d.es, los piñones de dientes rectos helicoidades, tornillo Sin- Fin-
Corona, los piñones de dientes rectos a 45oY eI''conjunto manive-
Ia biela corredera. cada uno de estos conj untos con sus respec-
tivos elementos para su funcionamiento. (Ver Plano 35)
3

En la mesa o Módulo 3 se encuentran instalados los acoples,
el freno y un juego de levas con sus correspondientes elemen-
tos para su funcionamiento. (Ver Plano 36)
como veremos, en los cáIculos para seleccionar el perfil angular,
se ha seleccionado a este un poco mayor. La raz6n es que cada
una de estas mesas no estarán fijas al piso o empotradas, en-
tonces las vibraciones debidas aI motor les daría poca estabi-
Iidad.
Para justüicar este sobre-diseño hemos asumido una carga de
([U. 200) libras.
1. 1 DIMENSIONES
La mesa metáIica se construyó en perfil angurar de !14" x tr lz*II ¡2" pulgadas con las siguientes dimensiones;
Altura = 40 pulgadas
Ancho = 30 Pulgadas
Profundidad = 30 Pulgadas
El perfil de la tabla tiene las siguientes características:(Figura 1)

K-716
Peso =
A (área
pulgadas
2,34 Lblpié
)= 0, 668 putgadaJ/=
S = 0,134 pulgadas
rxx= 0,449 pulgadas
v
FIGURA 1. Ejes de Trabajo en Perfil Angular
T.2 CALCULO DEL PESO DE LA ESTRUCTURA
4,48 cms2 I =0, 13g pulgadas4= 6, 33 "-"4
x=Y-0,446pulgadas
,r"= 0,292 pulgadas =0,77 cms.
de
del
w
w
L
= Peso total
= Peso x unidad
= Longitud total
W=wL
longitud
perfil utilizado
w = 2,34 Lb/pié _--e
L =(30 pulgadas x B) +(40 pulgadas x4)= 400 pulgadas= 38,3 piés
MANUAL OF CONSTRUCTION AMERICAN INSTITUTE OF STEELCoNSTRUCTTON SEVENTH EDTTION;- ig79, -p.l=5?

w-w-
2,34 x 33,3 = 77,99 Lbs.
35,45 Kg.
En este cáIculo se
derar que su valor
deprecia el peso de la soldadura por
no afecta eI resultado obtenido.
consl-
1.3 ANALISIS POR COMPRESION
40"
FIGURA 2. Pórtico de Estructura.
Para este análisis tomamos uno cualquiera de los parales que
actúan como columnas. (Figura 2)
Una columna es un elemento a compresión que tiende a fallar por
eI equilibrio inestable, pero no debe fallar por aplastamiento,
pandeo elástico, inelástico, o torcional. La característica dis-
tintiva de una columna es su esbeltez que está dada por la si-
guiente expresión:
= Longitud del elemento ( viga)
= radio de giro6
IIr
r
-ik

El material del perfil es en acero 1010 con un Sy=3230 Xglcrnz
E -- 2.1 x rc6 .Zl
Hacemos la comprobación del perfil seleccionado para un márgen
de seguridad del 4070, una carga aplicada de 100OKg. (2200 Lbs. )
y considerando una columna con un extremo fijo y otro libre con
11 = 1
4
El diseño se hace después de, varias comprobaciones de una com-
binación de las fórmulas de Euler (teórico) y de Johnson (empíri-
co).
1.3.1 Punto de Tangencia
El punto de tangencia de las curvas de las fórmulas de Euler y de
Johnson se determina en PerA
Pcr = Carga crítica Pcr = Sy
A = Area perfil A 2
Sy = 3230 Kg/cm2 Pe" =1615 Kg/cmz22A
SHIGLEY, Joseph Edward. El Proyecto en Ingeniería Mecánica.la. Edición. México, McGraw-Hill, 1979.

I.3.2 Coeficiente de Esbeltez
Se calcula en eI punto de tangencia según la fórmula de Johnson
1 = 56,64 Yr
Este resultado
hasta I = 57,r
57 ( adimensional).
nos indica que hay que
y la de Euler para Ir
Ia fórmula de Johsonutilizar
7 57.
1.3.3 Solución Gráfica
Para hallar los valores
guiente ecuación:
de Ia curva de .fohnson empleamos la si-
= 0.503
curva de Euler empleamos la siguien-
tPsl = Sy - K (l )- pero K .,I_Sy )_Arzd
21
6 = (3230 t<g/cm2)x(2 x 3.vtEF ro@-2 I( 1X2. 1x
4
Para hallar los valores de la
te ecuación:
ne
n jfzn
-(Llfi
= (1/4X3. 1416)2x2. 1x106 t<g/cm2( Llr)"
B
t4)2x(L I 4lx 2.1 x 106
Per = Per

Per - 5176290
(rlrl2
Para graficar estas ecuaciones, tomamos valores ( b?< I <_ 5T)r
supuestos, resultando las siguientes curvas; (Figura 3)
P,,A
FIGURA 3.
57
Curvas Euler-Johnson.
1.4 CALCULO DE CARGA CRITICA ( Per¡
Resolvemos eI problema con:
r = 0.77 cmzz A = 4.48 crn2 I = 100 cm.
/r
I - 100cmr i-;m-"-.Con este valor de I
rPer = 306,2 KglcrnzA
= 1291 8
Figura 3 obtenemos
o
Ir
yde
Unrvcnidod Autonomo de Ottiü¡to
D¿0ro Erlir¡t¡¡o

Pcr = 306,2 Xglcrnz x 4.48 "rn2
Per = 1371, 77 Kg
1.5 CALCULO DEL FACTOR DE SEGURTDAD ( Fs).
con eI valor de Ia carga aplicada y la carga crítica encontramos
un Fs, que se espera sea aproximado ó igual aI 4olo inicialmente
dado.
Fs=(Per-F)/F
= (1371, 77-1000) Kg/1000Kg
= 371,7 I 0.371 000
Que equivale a un 37ls, que se considera como correcto, de acuer-
do a resultados obtenidos.
1.6 ANALISIS POR FLEXION
Para este análisis tomamos un travesaño de pórtico y lo conside-
ramos como una viga apoyada en los extremos y con carga F en
eI centro. (Figura 4)
10

FIGURA 4. Viga apoyada en los extremos.
1.6. 1 Cálcu1o de Reacciones
Depreciamos
Rr=R2=
R1 = Rz
el peso de Ia viga
F Por equilibrio estático
(1000 Kg) = 500 Kg
1
T1
2
I.6,2 CáIculo de la Fuerza Cortante Verticat ( V)
Analizanso media viga, y por simetría son iguales:
F EntreAyB=EntreByC
(1000 Kg) = 500 Kg
V=lTv-1T
11

M = 1 FI4
1.6 3 Cal ulo de Momento Flector Máximo (M)
Este ocurre en el punto medio de la viga o sea en B:
M - 1 x 1000Kg x 0, 76 mt M- 190 Kgxmt.4
1.6.$ Cálcu1o de la Flecha Máxima
La flecha máxima ocurre cuando Ia viga está a plena carga en el
punto B, donde se aplica la fuerza y toma una forma cóncava ha-
cia arriba:
A24E = 2,! x 10" Kg/cm- I - 6,33 cm=
Y- I F1348 EI
Y - 1 x 1000 x ( ?6 "-l =,0,68? cm.E @"-4'ñ
t2
x

, DISEÑO DEL EJE I
Sobre el eje de 1"
diámetro. También
tro. (Ver Plano 2
diámetro eslá
está montada
de Eje).
montada la Polea
la polea plana de
de 5125" de
2t de diáme-
El eje tiene dos chaveteros de 1/8 pulg. de profundidad.
FIGURA 5. Diagrama de Momentos.
Rr ?o"
13

2.L. LOS MOMENTOSPOLEA EN V Y
TORSION TRANSMITIDO POR LAPOLEA PLANA SON:
DELA
T=V
T=v
T=V
T=p
63.000 HP
-
63.000x HPn
=)T = 69000 x 0.5 =7" L220
=+ T = 63.000 x0.5 =?PT
25.82 Ibs. Pulg.
25.82 rus. p,,,tg.g/
nulas las PérdidasEn eI caso de la
por transmisión
correa plana asumimos como
de potencia.
2.2. CALCULAMOS LA FUERZA DE FLEXION PRODUCIDA POR
LAS CORREAS EN V Y PLANA
Frr=2(F1 'I.Z) =){, =
F,. =2x25.82 lbs.pulg.vT
Asumimos. una fuerza de flexión para Ia
valor que de Fv. ya que anteriormente
pérdidas en la transmisión de potencia'
. F = fuerza que eJerce2 v polea en V.
19.67 lbs.
2\r
=" 4;-
3l- SHIGLEY, JosePh Edward. Diseno
2a Ed. México, McGraw-Hill,
Tv = torque en la Poleaen V.
r = radio de polea en V.
correa plana de igual
asumimos que no había
en Ingeniería Mecánica.1979, p.639
L4

2.3. CALCULO DEL VALOR DE LAS REACCIONES
R + R^ = (19.6? x 19.6?) lbs. =) R- + Ro = 39' 34 libras1Z1z
p,-x 30 pulgadas -19.6? lbs x 8 pulgadas -19'6?lbs'x 6pulgadas =0
I
R,"30pulgadas.15?.36tbs.pulgadas-118.02Ibs-pulgadas-0
R x 30 pulgadas - 275.38 lbs' - pulgadas = 0
I
R' = 2?5.38 libras - pulgadas R1 = 9' 1? lbs'
^ 30 pulgadas
Como O, * *, = 39. 34 lbs' ; *, = (39' 34 - 9' 1? lbs' )
R = 30.16 lbs.2
2.4. CALCULO
*"=*r't"*
*o= *r' tb *
CALCULO DE
Ma comotl -
-
u_ r/e
DE MOMENTOS EN CADA
M = 9.1? lbs x I Pulg. ia
M = 30.16 lbs.x 22 Pulg.b
ESFUERZO
s = ¿3TlJT
PI]NTO (A Y B)
M =73.36 lb.pulg.a
;M =663.51 lbs.pulg.b
S=Ic
= 1.000-0.t254l
d = 0.875 pulgadas-Mü; Perq. dU=TdItn
3lIbid, p. 582
15

G = ñ ?3.86 tbs. -pulg.3 \Jrl
o, ooszog4 p"lg. g
?3. 36 lbs. pulg
(0.875 pulg. )
32
\)"R = 1115 lbs.purgS
\tc = -luB- - n-=\J¡s
Ñ.= 663.52 lbs.pulg. ,,0.0657694 PuIg. o
2.5. CALCULO DE ESFUERZO DE CIZALLADIJRA
663. 52 lbs . pulg.@3
32
/\-: (\ = 10.088 lbs.vdB F*=
2l
YLXTa t^
=-YJapero r = 1 pulg - 1/B
2
0.4375 pulg.
7/8 pulg.2
Slaa
nda
á= J=32
2.6. CALCULO PRINCIPALES
:1=max-+x+L- z z *y
' L "-_,
= 25.82 lbs. -putg. x.0.4375 pulg." N (0.875 pulg. )t
32
CI" = 11. 29625 lbs-pulg.2 =J 0.0575481 pulg. +
DE ESFUERZOS
22
10.088 lbs +max = Z
-pdg2lT--' Ibid, pp. 582 -245
10. 088 lbs.ze';Jg7
16
= 196.45 lbs.xy p,ilg7
196.45 tbs.opulg.',

= 5044 lbs.o + ?pl4 1936 tbs.2 + 38b92, 602 lbs2FuLlE" pur.g:r- putg;4
= 5044 lbs + ZS4BOSZB tbs2p"Tp nurg. +
= 5044 lbs + 5047,829 tbs. : = 10.091 lbs.r"t*.z p"W7 -ffi,,.,
Z= 2 - (x )-+ o - =z (zi 2
10.088 .lbs. - 10.08t_&E ' * (196.4b tbs. )
2 p,Wz ;G oF5044 lbs- - 25441986 tbs2 + 88b92, 602 1bs2 a
ñisz pul$ 4 ffi-. n
,5044 lbs.
o - 25480528 lbs'
pulg. " putfi
5044 lbs.o -5047,824lbs. : -3.0824pulg. - pulg.
2.7 . CALCULO DE ESFUERZO ALTMNANTE
22"t = la - la 2^* 2a 1 =
l=
a = ( 10 091 lbs 2).
P-uIg' ")- 10.091 lbs. ^(-3.0824) Ibs + (g.0BZ4 lbs )purs-3 purp p"k-2i
L7

a = (1.01828 x 108 + 31 104,498 + 9, 501189? ) 1bs.2P'EF
a = 1. 01859 x 108 lbs.2 : r = 10 092 lbsputs;4 a ;@;2
2.8 CALCULO DEL LIMITE DE FATIGAq/
Se = Ka. Kb. Kc. Kd. Ke. Kf. Sfe
Se = límite de resistencia a Ia fatiga
S'e = Iímite de resistencia a la fatiga de Ia muestra de vigarotatoria
Ka = factor de superficie
Kb = factor de tamaño
K = factor de confiabilidadc
Kd = factor de temperatura
K" = factor de modificación por concentración de] esfuerzo
Kf = factor de efectos diversos
K" = 0.08 asumimos un acabado a máquina
Kb = 0.85 por 0.3 d 2 pulg.
gtIbid, p.582
18

K^-1-0.08 zr.tc
donde R = confiabilidad de1 eje
ft = 0.99 asumido: r= 2,326
conR=0.99Y Zr=2.326:
Kc = 0.814
Kd = 1 va a trabajar en un lugar seco
K^ - 1 pero K^ = 1.3 concentración de esfuerzo por cuñero--eKff
Ku=
Averiguemos características del material Tabla I
Acero 1020 Normalizado A1S1
Módulo de elasticidad : E = 30 x t06 t¡s lputg'2
Módulo de elasticidad en cizalladora = 11.5 x 106 lbs/pulg.
Resistencia de fluencias en tensión = S"t = 0, 6 S,
Coeficiente de Poisson = 0.3
3Densidad = 0,284 lbs/PuIg.
S cortante = 54.000 kiloP lPu¿tg.Zs
S = 50.000 kilop/pulg.v
BHN=131 Rockwell-874
Sfe = 0.b Su : Su' = 0.5 (140 800) PSi: S"' = ?0 400 PSi
S.enelpuntoB=0.8x0.85x0.814x0.769x1.3x0.769xRO 400 PSI 1e
1-KF
1.3= 0.769

TABLA 1. Propiedades Típicas de Materiales.
I
M1l ERI^L I
N.P l,f.s1 l
t\lA \ | tltA
RL5I5I LN( IA'I
rq ; s.(r{)
r 5 | \l¡ ¡
l,)
RESIS'f IN('t ^t)t t.l t,t-NLtA
!N 'l RA( L l(lNs!
I 757(a)25(d)
AI ARUA.I
NtrLlilol, tN l
j,(Jó t ¡)r1(2 ¡,trlg,1,
-t5
2-s
25
It'1a
3 t,..5
2t)35JI1g1)
ü
l425
;;lr)lll627
22t6t6t.ll8t6r5t9t9rti.tll(rllr5l8t5
REouc-lcróN i r.rorARE^
| (BHN)
It_Lsi l kg/ern'Lst
I licrr o tlulue\ccr.r forjado(ll0l(,(klCrut5(k)L. I r)l()C t trl(r( I i r,.l(lO | 0lu( k)(.j I (i2.1
O Io.t(|Llr)15cti)45CIU95Bttll(k)ltill3cl il8cl l l8(k)()t I4rlI l.l0t.lfr45-2l| 7ic)?.) a 0( e)
I l5rJ325t4c)4 06:l4ll(r4 I .It)(c).1 .1.10( c )
aó.1{){ c)5l.1t)(c)5l4r,t ü)[0 {rj56.ltt570( I
,'155y.l.¡ | |
1l¡ lrr
I ilJ 504 017 5E
I 445 4t)
3791. 5.lrI021 4)4 077 58
31el 5.r
4 218 oi,4 49' 0.1
5 062 7)7 381 r054 359 ó2
| ,rrrrrr,,rrlrr sirrr¡lc ' ,t l7.t1.r){ll1a,¡' 2 53t
li:lr.r,l,r e¡¡ lrlt¡ .i Tlll 61
ló
l:rlil.,,l., cl ltt,l ).rrl 11
I .¡rrrl¡¡ r,l,r ¡sl)rrl)l( 4 )tr!) (,)
l?j.ltl I 7¡i
, ir,¡¡ ¡rt,ilrz,rtlLr: lt.:,.,. r,1,,
' l;:t11,,,1., ett I t l.rL I irrrrtrr,rrlrt sirtt¡tlc ) lrrrl:l-;rrrriru,rl,, sint¡rlc ) (,1.1
I l-.il¡iltiir(l() 5rtlIlllc i 5 !/7(,
i | ;rrrrirrirrlo siruplc ', u719j N,rr rrrirf izarf rt 't 9lr3
lAeirb,rtlo ctl frio i .5 8.J5
j l ;'rrrirridu oiruple I 4 1)l l
I l.;rnrirrrrrlo sinrple I : :l.t] I::tir.rtl.r en frltr i 61.1
l(xJ I roo(, (51E" c) r x 2er,
..1 'l r9
.l {¡ )7
I 8674 42t)3 3143 5152 9524 64rJ
.l (r5tr12tr ()
85(,,0
l,¡l8..1
?n15
ü(lI ttJ
55
6 _.\
4850
bb52
5l55
5980't2.1 s
4ó75¡i .|
92
t15'll
120t10t4bló()lt4r05I rt5
I l(r126
r37t10r43t3liltl5ót49\'79r90215285l?0138
t49r80235229
2202853003403't 5
| 2ó0
57
61
5,t
69bL59A1
5658A<
lo40407057
46ól56
726054
5lIJ
t<
{5itr5i52
5j5){1
J]óI48
()íJt l2()0 (649"C),7e{i ltl()(jf E()0 (42?- cl it.] r.{? r87OQT 1000 (538" C) I 7'r5l r0óoQl' 1000 (538" C) | 9 t)2 t37oQT tr)(x) (J38 " C) i rrr o rc r 5 r
(J I lr.r(,(l (518 - C) it | (,70 ró6
:?1J 1.'iil! ts.l.r"""! i'l lrli ll!
3 917 56
4 218 ó(l6 r87 88
5 9(j_s 8.1
9 843 lrl()5 554 79'1 ?4t r 037915 ll38 577 t72e49t t156 i\'lt) 95
b 198 9ló 198 9l7 3t I l().1'l 945 r ll5 551 7L)
ó 046 EC'
b {i7 l2(,I l ó()0 165
9 49t r-15
? 3ll 104
949t l15
j -r 5uu
i 1867i 4 l4u
i .r oz.l
I 5uól
IIllli -t ¿'t"
1527rI 5 ¡íl)I ó4ó8ll2 l0ll, ewtI I43'r| 9140Ito:oeil i 219
1 s LtrsIr-¡nI r lsrI e r4(lI E 99,)
:\'Ol Il(fr (,591'Cti ilt:v t27Iislit.¡rlt¡ str l¡io
J I i7i ll2
Esrtf,irrf,) cn l¡ir¡ | E 511 122()(Jl' il,rr{r (5Jti- C) ll{r6Eü l5lO()i lUrr(r (518" C; lttt:^1o tSt:l::tir;rtl., crr l¡ir) I 7 381 105
24E248ll0100
i 'lt)I i)J
| 330 .I
| 42e
I 152
I 3r r
I ló(i
152
r50l::tir;rtl., crr l¡ir) I 7 381 105
lr:rr¡,rtlo crr l¡io l0 :i l tJ (,¡i5 l l5r)(l I tr,tn| (j.t8- (l) lt
' 2.1,r l6rr
( )( ) | rJiJ() ta2?' (l) i t > at,x zz0()(l'l ru00 (538' C) lrz ois r uooQr ruJO (538" C) 1t068ó 152oQ r l l0{) (593" C) il2 055 r8r)
I oltr 8s
i ? tl.lt-r 1t}0
i t(, 546 | -50
II4 068 J{rtr
lll 24e ró0
| 949t r35lll r08 t58
20

TABLA 2. Propiedades TípicasCementados.
del Núcleo de Aceros
NUM.AISI
l:5lAl)U(¿)
| '' I -- -
Al,tti,,tt t't,ttu,!c l..rí,,r1,,1,r'_ I !,,r,,rr.1 Esresor
ttJt:!.,tt¡r lltrrt',r,t ,,,', ,,, l"!'l-', NI¡B't !¿rrJ I zt , t,\ ltorntl
Al,tti,,tt I'trttu ,!c l..ttiirr i !tit'Ltt.ttt t, I etl
! ?;,;,, I NIrB I IZtt,l Zu , (S lx;rAS))! t Lt,,,,,u 5.Ud , :'"" tliltltt¡t Rock., ' trrt ttt'(d, i ur¡, ciu ", I I J{,
k¡47urrr' 1,.,r ts/,rrr¡ lsi I t2") | /- I lgrri ¡ie/ll)r5/e¡,¡ nÉ/eil¡ \sr I ri , I - i lgr¡) plc/lt) I f)¡ru pulg_-_,_^__
1___- j_i__ _ t_jt l]] lt jl.].t 4ói32 t.7l llqy ll:,s 9l icoz ll,ut90,oqg5 e't(, h., I ¡¿,7 55 3l I ol rrt.l i I rf) i ie) Gl5 0-).1 ñt) i )t5 :o i to r 6{) 16{) i r fr) I 1*; ast
i¿ii ;: tji: flill i ¿l i ll; i,;:l 3! tit i tii Í:l? 0lr) tr¡{r .t .5?0 ó5 i 30 i o0 i zr0 | .,l,c 70 i (1,) iJl (;iil e5r t/() , t.rd truj H I so I :sz j l,s .t{, i (l) (g) (e)
1:ll: l,t 1?j1 i-"ili i i5 rn i r¡ is - rri.:-1*¡ ,9vll r4r r?73.{ n0il? I so I I c.z 45 I rt^) i r;) i;isyir ;;i ;L; ,íól;; I í r ''' i ¿:; ;; l;; l:i Hi12 ó.j5 tr{rr r tr,.{75 r.rv l'rr,S I Su I rói I r,t 57 ( 57,5, l.ió¡ O.óízt2 141 l7l. lu 05.{ t.tj I t5,3 | su :sz j o,s 41 Cbr ; r,Dr o,olz
,t.to- r:ui,,ozc til-r8- rl ,r5 ,Fró-t5_l d-l-(r,) G)e4el n51 ?361 lu5Lte j ss i luo j i,: eo r rri i iii órl
cl0r5(b)Cl()2(t,r )
Cl0l0(¡ )
Cl l l7(b)
s\V(.¡ l'tJ\\'(.) I
5W() |
sw(.) I
350JIXI
.10(J
I i{)
231?(u)2317ía)25 I 5(a)
l(X.)l)o(¿ I
DWQ IDOíJ l'
lüJ,t()ul(xl
3l l5(a)32 I 5(a)
E33l o(b)E3r l0(b)
D()(l't'so(2.1sfJQ I
DC,QI'
3(XJ
J(,0450l0u
34lJ(a) ISO(l'l'10(l311 5(a) | DOQ I -l(ru
4ó?0(b)lDoQt 4504l{2r)(b) I 5( )(.)'l .}rr{}.ld2Li{ b) i 5-( )(.) I { 5(r
arr:,lt'rl Isorll .itxlseuo(¡)lso()t 4iu8610(b)IIr(,(Jt trx)
l:9ll(Xb) | ()(l .lrcelr)
i rlc¡,lc l, lu(.1
I
;
a
15252 2ri lr t7d r5rl ll j 5u tzv I t,t 32 ,(o0.5 1.52{ 0.{Jó0r0 19.1 t.¡5 ü b0e 9.t i 2,,8 | 5ó i 293 j ó,6 48 iC59 ' l,ytt.s o,ors
t-_ _- ,_ _1___i___._l_, __ _J_____l8511 r22 5.l|] 't'1 |22 |Se :qu I ¡,8 64 iCO2 'l.SZr OOeO8 085 il.5: 5.tt3 11 | 22,s | 62 : 235 | t(),7 .]E lcso I l.szr o.r,oo
14 ll? l(,7; il ?{t ló? I 13,8 | 52 ; 415 I 6,r 44 i('ol i r,lg.r 0,0a2H 4r0 2u| [ 9Jó t8.r I r3 | 53 | 4t5 | t,,5 a? ,ci?,si l,te] 0;N7
r¡zñ luulrurzs r+n-Tr,sfsr r 388 itt ir, tecii.r¡ru¡rsrf ?.il 167: 8.{l? 120 f t.r,3 j sr ¡ :.il I ¿,0 29 '.C(,1 'l.y¡o o.oie9351 |]r] 5n35 81 i20 ls0 lzel lr,r, 55 ic6{ lr,ituoiozoiiitlilll;rlTy tr) lt.t l.l.t ; li,l I 5, i 375 I i,8 5? l( -1y,5 o,y9r) 0,0J9
- l- -- i----r -t?) .),let tJ5 i lJ,5 I ó0 | 363 I E,.t 6t l(-02 r,ry_r 0,M?t1-1 , .)'112 l19 15,3 | 62 I 363 | ?,.¡ 5.{ (_-60, j] t,:,_, tt,oSS
l7y tr) lt.t l.l.t i lj,j I ,r, I ,,0 57 *y,5 o,rr. o,ore
r)') 5 \il tI t5.: , 5? i 3?l I c,l ó8 rrr , 1r¡ (e)
I:().||0(b) I.St)(J'll:'rll()ll))iIX)(Jl'l:9lri)(,r) S()(J'll:9lltl(e) : S(JQ I
I
Ee3r0(d) lsoQ'r
100Jlt(l
.lrf )
3(XJ
3u0
r) rr.t t.r5 l )y2 t05 lb,5 ] óó I 2el i t2,8 9l I (f) I (8) (g)
e56r ri6l óó0e c{ I ls I tz I zn ln,e s¡ | (rl I G) (e)
21

S" en el punto B = 39051 1b?. Zpulg. -
fl=Se: n=39051 lbs.. : rl=3.86a 10092 PuIg. "
n = factcr de seguridad
= esfuerzo alternantea
Se = límite de fatiga
M = momento
n = factor de seguridad
2.g CHEQUEO DEL DIAMETRO DEL EJE
32 M n tlsd- Se
tlgd = 32 x 3,36 x 3.86 lbs-Pulg.
39051 lbs ñ
wrg.'. 1/3 , tlsa = gOO1,42Z2 pu1g.3 i + d = (0.073860S pulg.3)
t22682,33
d=0,41957 pulg. -'? d=0,4195?x64 + d- 27 pulg'M
La presencia de no afecta el límite de fatiga a Ia flexión
según Sines.
EI diámetro correcto sería 27 164 y hemos asumido un eje de
1" con eI 0bjetivo de darle estabilidad y rigidez a este conjunto'
22

3. TRANSMISION
3.1 SELECCION DEL MOTOR
Como eI objetivo principal que se persigue con este motor, es
simplemente una transmisión de movimiento y no de potencia,
se ha seleccionado un motor cuyas caracterr"rr""" son las
siguientes:
Marca General Electric
HP tlz
R. P. M. 3390
Voltios 220 l38O
Amp. 2 z 1.?
Frecuencia 60 Hertz
Temperatura 40'C
Fases Trifásico
Este motor es de arranque directo ya que puede trabajar a 220
voltios o 380 voltios que para nuestro caso lo utilizaremos con23

el primer voltaje anotado para corriente alterna.
Este motor consta de:
- Un rotor en jaula de ardilla
- Un estator
- Dos escudos o tapas
- Una caja de Bornes
En los escudos, a cada lado del estator van montados unos ro-
damientos de bolas sobre las cuales gira el rotor.
EI diámetro del eje donde va montada la polea es de 18 mm.
3.2. SELECCION DE POLEAS EN V
Para transmitir el movimiento de rotación o ciror lar continuo
de un órgano a otro que se encuentra a cierta distancia del
primero, se emplean las poleas de transmisión.
Las poleas en v o acanaladas tienen esta forma para guiar la
coffea. Además, de impedir que la correa se salga a causa de
una mala alineación de los ejes, hace que el contacto con la co-
rrea se realice en los costados únicamente, dejando un huelgo
entre su fondo y la cara interior de Ia correa. sufici. ente para24

permitir su ventilación. Las poleas en V vienen con una, dos,
tres y mas canales. Estas poleas se construyen de acero pren-
sado, fundiciór¡ aluminio, gü€ son las más comunes.
Ver Plano 3 de Polea en V. (Figura 6)
FIGURA 6. Asiento de Correa en Canal
Como el motor previamente seleccionado es de ll2 HP y 3390
RPM de acuerdo a Tabla (3) seleccionamos una polea en V tipo
A.
Para seleccionar su diámetro recurrimos a Tabla (4) que nos
sugiere el diámetro mínimo para esta clase de motores (se
tiene en cuenta ángulo de contacto mínimo).
Diámetro asumido: 2 pu1g.
Para eI diámetro de Ia polea en V conducida, 1o asumimos ma-
yor, con el objeto de disminuir la velocidad en la transmisión.
25

TABLA 3. Secciones de Correas Recomendadas
'l'
ilot|()B
Yelocidad
. sinc¡.R.P.M,3.ooo
1.50O
1.OOO
?C.1I)w
3 .000
1.500
750
3.0001.5O0'l nnñ
7ro600
3.O00
1.500
1.000
750
600
3.ooo
1 .500
1.0c0
750
6oo
_ uoToR
Vel ocid.adC .V. si-ncr.
'lR 1 <n^L ) L . )vv
15 1.COO
15 75015 6C0
15 5oo
20 1.50C
20 1.OOO
20 75O
20 600
20 500
Sección
TI
B. o C.
B. o C.
¡
v-
C.o D.
C.o D.
t, .o !.
D.
nioToR. ..
Velocid.adC .v. sincr.
. B.P.M.lOO 1.500100 l.ooo1Oo .75O
100 600
1OO 5OO
1OO - . ,428
100 375
c. Y.
*1
L
J/43/4)/+
:/o1
1
1
I1'
7t1+1rL2r -1,L?
1+.
2
2
2
2
2
Se cción
A.
Á.
A.
A.
A.
A
t
A.
A.A.
4.
I
A^?
A.o 3.i^a
A.o 3.'. A.o B.
C*c 3
D.c Z
D.o
D.o E
D.o i
D.o I
t25I2'r2512'1?q
1 ^CLa)
150
150
150
1rqr50150'l Rn
200
200
.200200
1.000
750
600
500
42t)'..
37'. . :.*1,-.'.
1.OOO
2\
25
25
2'25
)rr
30
lo3o
A^
AOtv
40AA
1 .5oo
1.000
i50OUU
500
1-5oo1 .000
.'C^l)v
6oc
I = ^.n
750
600
26
IIIIII
I
u.
D.o
E.
E.
5.
5.

TABLA 4. Diámetros de Círculo Primitivo en Milímetros,de las Poleas Normales.
Sección nArt Sección'B'r Se cción ttC" Sección trDrt Sección iEn
' a'l
94
97
99
102
104
107
.109tl2r21
'L52
+?8218
279
345
406
.508'-615
13?
r42t47r52rr7153
168
173
1?8
218
229
279
33oA^<
508
635
762
965
229
2)4
239
244
249
214
219
269
33o
406
508
610
762
914
1.118
r.27OI.422t.626
3lo340
351
391
3TL
381
457
559
686
838
1.016
1.219
r.4731.7?8
2.o83
2 -4lg
546
559
572
,84597610
686
7e7
889
1.016
1.1681.320
t.4737.6i61.830
2.r342.438
27

Diámetro asumido 5. 1/4 pulg.
3.3. CALCULO DE VELOCIDAD Y DISTANCIA ENTRE CEN.TROS DE CADA EJE.
Calculamos velocidades (RPM) en cada eje¡
Ver Plano 4.
Transmisión entre motor y eje I.
Esta transmisión se efectúa por correa en V.
Motor 0.5 HP 3390 RPM
Diámetro polea motoriD = 2 pulg.id^-,_.*.-.. = 1.828125rr/ prlmltlvo
Diámetro polea en eje IiD = 5.25 pulg.
dl = 5.0?8115rfprimitivo
n =dN1 n =1.828L25x 3390 n =L.22O RPMT --
I b.o?812b I-ut
Distancia entre centro del Motor aI Eje I
C = 26.375 pulg.I
Transmisión entre Eje I y Eje II
Esta transmisión se efectúa por banda plana.
Diámetro Polea Mayor - D = 2.5 pulg. (mortada en eje II).p
28

Diámetro Polea Menor = OO = 2.0 pulg. (montada en el eje I)
RPM del eje t *, = t.220 RPM
n = dNl n=2xL.22o 11 = 9?6RPMil il 2.5 II
Luego RPM de Eje II = 976 RPM
Distancia entre centro de Ejes I y II "r,
= 2t'625 Pulg'
Transmisión entre Ejes II y III
Esta transmisión se efectúa por cadena
El piñón menor tiene t2 dientes (montado en Ejes II)
El piñón mayor tiene 18 dientes (mcr¡ tado en Eie III)
La cadena es número 40 que tiene (paso) P = 0' 5 pulgadas
A veriguemos los diámetros primitivos de los piñones¡
D = P P=PasodecadenaoPiñónc ffi N = número de dientes del piñón
D^ rr = P D-., = 0.5 D -, = L.932 Pulg.u -- sen (180) crr s"" (15) c rI
ED = 0.5 D = 0.5 D = 2.88 pulg.-c III SJ, T1s0) -cIII Ten (-lO- cIII
1B
n =dN n =L.932 x976 n =654RPMIII T- III ---;88- III
Luego RPM de Eje III = 654 RPM.
29
Univenidorf Áulonomo ds 0(cidünte
De0ro Erbli0t{0

Distancia entre centro de entre Ejes II y III.
C = 28 pulgadasilI
3.4. SELECCION DE TIPO DE CORREA
Tenemos un motor de 0.5 HP. 3.390 RPM, dos poleas; de 2
pulgadas de diámetro exterior y 5.250 de diámetro exterior.
Asumimos que eI motor va a trabajar 8 horas diarias.
3.4.t. Potencia de Diseño
HP :HP K--- diseño motor servicio
Para seleccion"t K"ur,ri"io como sabemos que (A) no va a es-
tar sometido a sobre-cargas, entonces eI factor de servicio
será de 1. 0 como va a trabajar solamente 8 horas se agregará
0.1 quedando así el Kservicio en 1.1. (Tabla 5)
TABLA 5. Factores de Servicios de Sobrecarga
Porcentaje de sobrecarga 0 25 50 75 100 150Factor de Servicio 1 . 0 1. 1 L.2 1. 3 L.4 1. 5
- n 5 x 1.1 HPHP - U.--- diseño diseno
3.4.2. CáIculo de RPM conductora y conducida
Calculamos r-(RPM)d=D tl =dor
- n., trl D-
30

tr1 = 1.929125 x 3390 n2= 1.220 RPM-rd = p primitivo polea menor
D - A primitivo polea mayor
Corro Ia distancia entre centros la hemos asumido
como 26.318 = 26.375 pulgadas
3.4.3. Cálcuto ángulos de contacto de poleas
Calculamos ángulos de contactJ
(Polea mayor y Polea menor)
or=-1
t(- 2 Sen D - d2C
2 x 26.375
(0.616113)
0* it- 2 sen 'c..rbo-z)
0r= fi- z s.rr-l
A= lt - z (3. bgzg) + 0s = tT - 7.oB4G = !72.9s"y;L78"
Or,=5(+zsen to-o ,,O =fi+2sent u.z5o-z2C L 2"26.375
0l = + zsen t,0.06161118) = 0u= fr+ z G.bBz3)
f/roro, p.63931

0=L
al=f7s
O=L
I(+7.0642 =0 =18?.6L
Angulos de contacto Polea Menor
Angulos de contacto Polea MaYor
3.4.4. Longitud de Ia Correa en
r i2 2L = \ Ac - (D-d) + (1/2) (D 0.V1
L- 4 (26.375) - (5.250 - 2l
3.019 +2 x 3.2635)
rf-L =\ /2783.5624 - 10.5625 + 0.5
8t_,CATALOC'O DE CORREAS
V.
+dO)s
+ 0.5 (5.250 x
"DAYCO", 1980, p.3
32
(15.849?5 + 6.527)
277t.9999 + 0.5 (22.3?675)
L = 52.649785 + 11.188375 .
L = 63.838 pulgadas
Nota: Convertimos Grados a Radianes dividiendo por 57.3.
De catálogo Dayco seleccionamgÉ una correa tipo A-64. Este
catafogo nos da las siguientes características;9/'
a = 1/2 pulg.
b - LLl32 pulg.
Long. Ext. 66.3 pulg.

TABLA6.LongitudesnormalizadasdeCorreasTrapezoi-dalesnorteamericanasconstantesdepotencia.
El ralr¡r,l,l, rr¡ir¡ cs cl (li¡i¡llrtr0 ¡rrirDitiro rlc lir ¡lolcir nlo|l()r tlttd ¡lcl¡t r¡tili¿ursc
eot¡ osl;¡ sccció¡r. Si sc cr¡¡llea rrrut polcit rrriir; ¡rut¡ucli:t, ltl ¡lrttlrrrltlc cs t¡tte lrt corrc:t
lorrg:r l)¡cit ir¡n¡ciórt. I estii cxpresatlit ctt ptllglttl;ts (¡ trr (c¡ll¡lllllros).
sEccloN ^
DJ"'r, -- r,,;k(7,62 cnt)
D, tttltt = 5,4 Ptilg(13,71 cttt)
I),tttítr=9 ¡rtrlg(22,ü6 t:ttt )
l), tttitt = lJ ¡nilg(Ji cttt)
secc¡óx s sr:CClóN C SI:('CION ¡)
-V- L-rnrrtr (-Co- Lottgitul t. Cu' I-ottgitudrrcil prirttitivrt ', tÍeu lttlttttltt'untint. PulE lt ttt) ', ,ttittt ¡ntlg (crtt)
A26 71 ,3A3l 32,3A35 36,3A3E 3e,3
A42 41,3
A4ó 4'l,3A5r 52,3
A55 56,3
A60 61,3AóE 69,3A?5 ?6,3AEO 8l ,3A85 8ó,3A90 91,3A9ó 97,3
^105 l0ó,1
At l2 l 13,3
Al20 121,3Ar2E 129,3
lJ35 .lb,E (91,4)
B38 3e,8 (l0l,l)B42 43,8 (l I I
'2)846 4't ,8 (l2l,4)85r 52,E (134,1)
u55 56,8 (144,2)
860 6l ,8 ( I 56,9)Bó8 ó9,8 (111,2)
u?5 ?6,8 (195,0)
rtsl E2,8 (210,3)
835 86,8 (220,4)
Ilgo 91,8 (213'l )
ll97 98,8 (250,9)gr(f5 lLl6,8 (211,2)
til 12 I I 3,8 1289,0)Bl20 l2l,E (30ti,3)
lJ 128 l?9,ti (329,6)
53,9 ( l-l(,,9)ó?,9 ( t-5e,?)'t0,9 ( r 60,0)'t't,9 (19?,8)
83,9 (213,1)8?,9 (721,2)92,9 (235,9)98,9 (251,2)
l0?,9 {17.¡,o)I 1.1,9 (2,l,f,l)122,9 1312,llI 30,9 t 3 32,.1 )
l4ó,9 (lll,l I
160,9 (4(,E,6)
l?5,9 ({.16.?)
182,9 r.l(,1,5 r
l9?,9 ( 1(,l,br?12,9. (5{o,?l240,9 16l I,b)2',10,9 (6uE,0r
3U0,9 (1L{,2)330,9 (6^ltr,.1)
3ó0,9 (91(),6)
390,9 (t9l,tl)4?O,9 (.1(i()9,0)
r2l,l (ll3,l)| 3l,l (331,5)r47,3 (374,1)ró1,3 (409,?)
| 7ó,3 (14?,E)| 83,3 (465,5)r 98,1 ( 503,ó)I | 3,1 (54 I,?)l,l(J,tl (61 |,ó)??(),8 (6¡t7,E)
l({r,li r7(il,0)l:r(,,s (d40,2)
3bu,¡i (9 | 6,4)J()0,ti (!^)2,6)4lr,,fi ( l 0Ó8,E)..lt{t.ri (l12l,l))lr r,¡i ( I l? 3,ó)6lxJ,tj ( | J2ó,0)(rfrtl,ll ( l6?1,4)
(bv,l)(E2,0)(97,?',)
(e9,8)
( l()9,9 )
(r20,1 )
( 1 32,8)fl 4 3,0)
il )5,7 )
( 176,(ll( 19.1,0)(10f,,5)
(2r9,1)(2Jl,'t¡(:{?,1 )
( l7( r,tl )(2dl,i)f108,|)(]l8,rl )
c5lCÓT)
c68C?5
c8lc85c90c96
c t05cl r2cr20c 128
cl44cl58cl Tlcr80c 195
c2l0c240c2?0c300c3l0c3óoc39t)c420
f) I l(l;rJll¡JiDr44IDI5E
iorrriDlsurDt95I l).r ro
'l)l{(}DlTt)I):10(l
,l)llr)I ).tólr
;D'l'r)lXlll
'l)Jñrl
lJl.¡r)I )(t{ rr )
l)(¡(rl¡lll41 145,8 (3?0,3)lll 58 I 59,8 (405,8)lJt73 174,8 (444,0)
IJtEU r81,8 (4ó1,7)
Iil 9-5 116,8 (499,6)
lJllr) lll,8 (53?,9)lJllu 24U,1 (610,3)
fJ27u 710,3 (688,0)B3oo 300,3 (162,'1)
Conslantcs Paral)otcncir nollri¡rll:
u - 1,'137c = 13,962¿ = 0,0134
Constantes put.,potencia ltot¡¡i¡¡¡l:
a = 2,68+c - 5,3?6¿ - 0,013ó
Constuntcs Parüpo(cncia nontiltal:
u = 8,'192c = 38,819¿ = 0,0416
Co¡¡stat)tcs Parill)otc¡rcra nor¡¡inal:
tt = 18,788c = ll?,7c = 0,0848
Ct¡- Lottgitttl ( t'' I'ottgittulrtctt lrt¡ttitit¡t ¡t''t I'titttititttuunt. pulg ttut) tttt¡tt. lntlÉ ((ttl)
33

Long. Int. 64. 1 PuIg.
Peso Aprox. 0.4I lbs.
3.4.5. Velocidad de Ia Correa
VeI. = f¡d. nn
Vel. =
l2
Vel. = t. ?75 pies/minuto
d = diámetro polea menor
n =RPM
3.4.6 Potencia Nominal Por Correa
co¿ ot
HP=nominal
De tabla 6
a = 2.684
c = 5.326
e = 0.136
D = Diámetro primitivo de polea menor
K = Corrección por relación de diámetrosd
Tabla 734

za;z s.s-s E llI !i=== ==== -i--
s¡-OoÉr-r€
haÉ3r-l--r.
i
I
I
I
I
J
0)71
Uc)5r
G)ñac)IcOOOO
0) r-1rt ;^
UO
.i -,-
o oc,)
f.-
'1
an
F{
vrh.l=
-- €- -_ ---.--irli-:
=^ -: €- r-==l=
1-rf,-
--l
II
I
^ -
.t - ¡1,
=----\- - - - ^t-----l
;=iii= l;=;-=---- :': - --:---j^; >::^-n --:--.4
= 1::: i 4.;-ñ;-3,-::-:-:-: ----er
I
I
-'l
35

D^ = 5.078125t.828125
D1
HPnominal
HPnominal
D2 = 2.77D
I
D^ = Primitivo Polea Mayor2
tabla (7) y con relación
= 1.13
de diámetros, r= 2.77De
Kd
0.09r3\fro \u7?5/
- 5.326-TlreT
0.0136 (177il2.r-o-
x 1775
10
l- o. oe= 12.684 (0.56338) - 2.3566371
I
- 42.848.5 | x 1. ?75
T_l
HPnominal
HPnominal
HPnomular36
Hp = f turn (0.e49GGe) - z.BboGS?r - 0.0428;J x
__Jnominal L_
t.775
= E
b4'e11b - ,. Bnnnq t.775
(0.1494259) t.775
= O.267

3.4.7 . Potencia Nominal Co"tegid" 9/
calculamos la potencia nominal corregida, es decir con los
factores que la modifican por longitud (KL) y por arco de
contacto (K )e
HP =HP K Kcorregido nominal I L
Donde Ko es coeficiente de corrección por arco de contactoU
distinto a l80o, de Tabla 7 y con ;
DZ' D1 = 5.250-2 DZ-Dl =0.t2BZc 26.375 c
K = 0.99e
K = Coeficiente de efecto de longitud ya que las correas cor-L
tas se flexan más frecuentemente alrededor de las po-
leas largas.
De Tabla 8 con correas Tipo A-64 K = 0.ggL
HP =HP xK Kcorregido nominal 0 L
HP =0.267 x0.99x0.99corregido
9lFAIRES, Virgil Moring. Diseño de Elementos de Máquinas. 4a
Edición.Barcelona, Montaner y Simón S.A., L977, p.600
37

TABLA 8. Factores de Corrección de Longitud K,
l)L5l(,N,\( tr )N
f)L l^ t()\r,ttul)N()RNlAt l¿r\l),\
Cilt l,nlg l)J
sL((tr)N IRANSVLRS.\t. t)l. I^ ((JxRLA
L
--T
¡
ób,(.)
18,788,9
,
eó,5 j
l()ó,ó i
I ló,8la¡) s
l ir,ll5r J
t7?,1
I 9( r,5)f r'l r205, ,1
fr\r¡22 E,b
2,1-1,E
24 b,,1
26b,72 84,5101,r(
1)5 r
3ó 5,84() | ,34f9,4as't )
495,353],4609,6ó8 5,8'162,O
818,29t4,4990,6
106ó,tit?tQ')
l3'l | .(,1524,r)l6?t¿,4
Itl
lt.l),t8
4)
¡!i¡(){ l
('¡
?5¡rU
¡i I
¡irvo
9tt97
| ()5
||2Ilo
llEti{t5trl 7.l180
195
2t0240lJtl-l(){}
-t.lol6(i3904 2()
480
5-l(lb00(r6f I
(),8 I
rl,N.l
0,rJ7(),88
0,90
lr,rl(,,().1
I r,:/(,
l ),(r¡;
l,l)(J
l,(lll,{}4
l,rJ5
i ,()6
l,0lJ
l, t0l,llI,ll
t.t4
0,El0,830,85
0,870,890,9u0,91(),95
u,91
(),9tJ
0,99|,(.)0
l,021,041,05
|,0'1
1,08
t,tl1,1,1
l,l5|,ló
r,18t,l9t1)r a(t,27
0,80
u,8lu,8 5
0,8?
u,890,9()0,91
0,cr
(i,94lr o5
tJ,9'l
0,981,00I,L)2I,04r,05
l,07I,08|,t I
I,l4I ,16
I,l9t,2l| .)1
..(I,Eó
(J,¡i?
( ), r)o
f ),91
u,94
0,9ó0,96l,(x)t,().1
l,ll5
l,o71,09I,l II l')
l,r(¡
l,t5| ,lU| 1l
ft,gl
0,92r),94
0,96{ ),9!)
t ,(,1
|,03t,05| ,0?| ,09r t)
I ,l4| ,17l,l9
3B

HP = 0.26tcorregido
si fuéramos a transmitir potencia, esta correa no sería Ia
adecuada ya que solo transmite 0.261 HP. Para corregir esto,
podríamos cambiar eI diámetro de la polea menor a 2-1/8 la
que transmitiría 0.51 HP. como seguidamente se demuestra:
Vel = d.N = VeI = * 2.125 * 3390 = VeI = 1886 pies
LZ tZ minuto
g 0.09 2
Hpnominal= a 10" - c - *uV K¿DT IU
3 0'09 'Hp nominal = 2.684 10 """ -@ - 0.013€ (1886)- 18?9,1886 t. t3xZ, tZS 10o 10"
0.09Hp nominal = 2.684 (0.5302226) - 5.326 - 48375, 145 1886
2.4oLi5 -f, T
Hp nominal = 2,684 (0,944499) - 2.2t80t14 - 0,0483?51 1'886
HP nominal = 2.5350353 - 2, 2663865 1'886
HP nominal = (0.2686488). 1.886
HP nominal = (0, 5066 HP nominal 0.51
Univenidad autonomo da Otcidcnrt
Degto Brbirof"'o
r-B10
39

3.4.8. Cálculo de Fuerza que ejerce Ia correa.
Calculamos la fuetza que ejerce la correa en V.
F. = HP 33.000 ¡i' = Fuerza en el lado tirante'm ^2
F. HP = Potencia a Transmitir- r (33.000 constante)
VeI = velocidad lineal de correa
p F^ = Relación según ángulo de1 2 contacto
t, Es la relación según el ángulo de contacto
Feo Para nuestro caso el ángulo de contacto es de 173'
Con este valcr vamos a la Figura 7 y encontra-
mos:
tolF. : FZ =4'65
I
Ibid, p. 551t0l
40

FIGURA 'l Fuerzas que actúan sobre la Correa
Vel. =3fb N Vel = 5Úx s 25 x 3390 Vel = 4.6b9 Piesminutot2
F = 0,5 33.000t 4.659(I - 1)
4,65
F=1
t2
16.500T.T5'7
F1
F -F= 4,65 2 7
4,65
Correa
4.57 lbs.
F =4,51 lbs2
4,65F2
', = 0.9? Ibs.
3.4.9. Duración de la
Como
pico(v)
, ToffiF =% *t +rü ;f, =K"
Fuerza centrífuga
Fuerza lado tirante
Fuerza flexión
F
F
F
c
1
b 4l

Kb; K" Constante para cálculo de correas según Tipo A.1!/
Para correa Tipo A K"= 0.561 ; Kb= 15?
Fc= 0,561 ( 465912 Fc= 12.1? lbs.1 000
Fb= Kb Fb = t'l Fb = 78.5 lbs.
Dt2
Dl = Diámetro polea menor
Fpico= t2.17 lbs.+ 4,51 lbs. + 78.5lbs. Fpico = 95.18 lbs.
Con Fpico= 95, 18 lbs. nos da una duración de 1 x 108 ciclos
de viaa9l
Vueltas = Vel = 4.659 Vueltas = 72.68IVIinuto Lor¡g. W Nlinuto
Clgl." = 72,68 x 2 Ciclos = L45Minuto Minuto
Si se cumple que 2 ciclos Entonces;wtEuto
3.4. 10 Tiempos de Duración de Ia Correa en Horas
t = Número de ciclos de vida | = 1 x 108 ciclos de vidaCiclos /M inuto 145 ciclos/minuto
LLI
-' FERNANDEZ.., cla.uQig, Diseno Mecágico. cali, universidaddel Valle, División de Ingeniería, Depto. - de Ingenieiíá
Mecánica, 1970 p. 3 (Conf.erencias)121
- Ibid. p.3 42

t - 689555, 17 minuto t - It. gZ, bg horas60 minutos/hora
3.4. 11 Fuerza en Rodamientos debido a la corre^El
Fuerza en Rodamientos = número de correas (F1+ F2)
Fuerza en Rodamientos = 1 (4. bl + 0.92) Ibs.
Fuerza en Rodamientos = b.48 lbs.
3.5. SELECCION DE POLEAS PLANAS
Dentro de las poleas que se utilizan para transmitir el movi-
miento de rotación o circular continuo de un elemento a otro
que se encuentra a cierta distancia del primero se encuentran
las Poleas planas. Ver Plano G.
Normalmente además de transmitir el movimiento enunciado
anteriormente, su objetivo es cambiar el número de revolucio-
nes entre uno y otro eje, que también es el objetivo nuestro.
Las poleas que transmiten por correa plana tienen un pequeño
abombamiento para mejor adherencia. Generalmente estas
poleas constan de¡
t3lIbid, p.10
43

Cubo-LlantaYBrazos.
Se ha seleccionado una polea de 2 pulgadas de diámetro para
ser instalada como motriz o la que comunica el movimiento y
otra de 2-t12 pulgadas como polea conducida o la que recibe
eI movimiento, con el objeto de disminuú R.P.M.
3.6. SELECCION DE BANDAS O CORREAS PLANAS
Definición:
Correas son tiras largas delgadas y flexibles, planas o trapezaoi-
des, que establecen la unión entre dos poleas sobre las que se
apoyan y hacen girar en virtud del rozamiento.
Se construyen de cuero, algodór¡ lona, pelo de camello, caucho
y sus extremos se unen por costura, pegándolos, remachándolos
o con ganchos.
Hay correaS hechaS de una capa, dos capa5, etc. Una correa de
algodón o de lona de cuatro capas, equivale a una sencilla de
L+-tcuero
t4l-'SERVICIO NACIONAL DE APRENDTZAJE ,'SENA'' CuTsos de
Aprendizaje.Auxiliar del Mecánico de Mantenimiento Inds.Bogotá, 1963, pp.6-8
44

Seleccionamos una correa plana de algodón (consiste en va-
rias telas o driles de algodón (entretejidas y compactadas en
aceite de linaza) de 1/4 espesor y 1.3/8 de ancho (cuatro ca-
pas).
Luego los datos para lc cáIculos correspondientes de la co-
rrea plana son¡
RPM eje I (conductora) = t.220
RPM eje II (conducida) = 976
C__ (distancia entre centros) = 2L.625 pulgadasII
3. 6. 1. Potencia de Diseno
Asumimos que eI motor va a trabajar 8 horas diarias.
HP =HP Kdiseño motor servicio
Para seleccionar K de servicio : (Tabla 5).
Como sabemos que no va a estar sometido a sobrecargas,
entonces el factor de servicio es Kservicio = 1.0 como va a
trabajar solamente 8 horas, se agregará a 0.1 quedando el
factor de servicio :
K - 1'o + o' 1 K"""rri"io = 1' 1'
HP = 0.5 x 1.1 HP = o'55diseño diseño
45

3.6.2. Cálculo de RPM conductora y conducida'
RPM conductora = 1.220
D-d.
n2
r{
n 1 rv¡ = * 11 n2.=
t1'¿ D
= 976 RPM
2.0 puls. x 1.220 RPMz, b purgs.
3.6.3. Cálculo de ángulos de contacto de pol""sE1
C = 2t,625 pulg.
e =f(- 2 sen-lS
-1g =-JL-Sen (z,s'2.0 )s \Ñwl
D=2,5 Pulg. d - 2,0 Pulg.
lo-¿\t-l\2C t
o = 5¡['-s
= 9I+L
= fi+ Sen
= lf + s"rr-l
e=L
= 9f+
9T+ sen-t ¡*g0L
g =ff-s"rr-tfo,u \-- e = tf -sen-t(0, 115606)s WSI- s
(0.662388)-+ 0" = 1?9.33+ 0" = 179"
sen t l"-g-\\zc I
(0.415606) t e (0.662388)L
Op. Cit.
46
tu /tor*tr, virgil Moring. p. 583

0 = 190.66 x, g = 181oL.VL
€ = Angulo de contacto Polea menors
g- = Angulo de contacto Polea MaYorL
D = Diárnetro Polea Mayor
d = Diámetro Polea menor
C = Distancia entre centros
3.6.4. Cálculo de longitud de la corre" pt"*É/
2L-2C+1.5?(D+d)+(D-d)
4C
| = 2 x 2L.625+ 1.5? (2.5 + 2.0) + (2.5 - z.Of4 x 2t.625
L = 43.25 + ?.065 + 0.25 - L =50.315 + 2.8901? x I0386J
L = 50.31? Pulgadas
L = Longitud de correa en pulgadas
C = Distancia entre centros
D - Diámetro Polea Mayor en Pulgadas
d - Diámetro Polea Menor en Pulgadas
47
t6l- Ibid, p.582

3.6.5. Velocidad de la Correa Plana.
d = diámetro polean=RPM
Nominal de la Correa
= HP = 1.375 x 798 pies x 4%
HP
b
V
Np
= 1.829
Ancho de Ia correa
Velocidad Tangencial
Número de Pliegues
I" t i "_]229t2Vel. = 5-C¿ tt = Vel. =
Vel. = 798. 48 pies/min.
3. 6. 6. Potencia
HP=b.V.NT4orp
Como el arco de contacto de las poleas es de 180o aproximada-
mente, no hay necesidad de afectar este resultado por un factor
de corrección de contacto. Corp vemos, esta correa está bien
seleccionada pues puede transmitir hasta 1,5 HP aproximadamen-
te y solamente se está transmitiendo tlz IJP, luego está bien
seleccionada.
3.6.? Potencia Nominal Corregida a Potencia Real.
L7 lHp = HPlPulg. x C x C x C^-',.realmPft7l- Ibid, p. 589

C = Jaula de Ardilla de arranque directom
C = 0.5m
C = Polea menor de 4 pulg. C = 0. 5pp
C = Ambiente de polvo Co = 0.74fI
HP/pulg. con 600 pies/min. y una capa de cuero'
transmite 1. 3
HP/ Pulg.
HP =1.3x0.5xO.74 = HP =O.2405real real
C = Coeficiente de corrección para tipo de transmisión. (Ta-m
bta J)
C = Coeficiente de corrección para diámetro de poleap
C = Coeficiente de corrección para condiciones combustiblesf
3. 6. I . Fuerzas que ejerce la Correa rc |=cr e2
/a\J Algodón
ri- =!72.500g2- jU algodón
L= 6 t= dT -
t8l- Ibid,' pp. 581,589,593
Univcnidut !utonomo de ktidtflrc
Deoto Erbliotelo
49

$ úJ CD '-{f- cO cO tr-
oooof-corotúl ^
ro(oD-coo)o. -.ÉF.TOOO U OOOOOFI
GCd!|^o .Y$HSa fi
eEE$¡*- 'i r'''
a x*bpÉEH b gs E-Eafft ; E6 Ed*-ó.9 á 'tE ooS'o H 3 o .g'E dca - É
F g-T._ o o o)
x -i<ro¡- tÚ 'É 3 t a
fvvv¡- a É al c),. -Eo'rr3F 5.:Er=o!o Eooo* ait*Fü H ;ig"^- * O O O r. é = Ct':'l F ^,A^ gEEÉ*,H E ügEg'EÉ HEE..8.ÉH E intió Y o 6 6'n Y (r o o o-c9bo EóóóE' o 9F-o:E Ho*-BF g ",áHEt I ,i^SS._ 6 E.Í " "68 H.;vF3 :g SHnnEE ó+,oddo? E EHS$16¡l F'i.', oooooaooi o E s. cÚ dA-Y :=ño'r<.> U <FUO
50
S{odXc¡(ny0)¡r'r-! +vñv^YÉ-rcd.:HüI.
Í{;CH+> v r'-{ Cú
C) - '-{3 ó c'9oooS. C,, C¡ Hoi5X: dd--E ñ F9- t{ ¡i*nSr!ru;cdd*O, '>Ori.rOddY.vF{F{ (UnFl¡1+¡u.d.dé
€1J ñ!F!H.N
!uooOücrqrtu'*d€ rn
3's g iE 5 5'f¿dd!Uü';<
trU
vI.izH
zor\
oAHFr
aO.dc)
c)HfroUc)
ao+tq)
.F{
+{c)oU
Ifn
F

-FFF(\t = I lado tirante Uz = 2 lado flojoAA
G = "o
inicialA
LgIF. -F =33000xHP = F-F 33000x0.5-l-1 -z t z= zgE-tang.
", - Fz = 20.60 = F1 -
', = 2o lbs.
F.=20+F^(a)LZ
L = 50 pulg.
(Suponemos ajuste en distancia entre centros; L l4l
E"= T*- e = ry# 8o= o'01
q = C' €-2=, q = 1?2.500 (0.01) ? q = 1?2.5 PSI
F= ( A=7F =(r xtxb=7F-t72.5 x0.250x1.375o vo o " o o
F =59,2 + F l;60lbs.oo
1q + tfi- = 2 YF- +\q .\E = 2 1/6¡"
\Fl . \tr' = 2xt.744s4, {i .ll{'= 1b.4e lbs.
tel- SHIGLEY, Joseph Edward. Op. Cit. p.581
51

,F +F =(15.49)- F +F =239.9
12-/t2
F + F x- 240 Lbs. (b)y2
Reemplazando (¿) en (b)
25.83+F +F =240 Lbs.--,2F_=240-2022-'22F =220 F =220 -\F-=110Lbs.- -2 -2 T=7 2
F' = 130 Lbs.1
3. 7 SELECCION DE PÑONES PARA CADENA
Se quiere disminuir velocidad a partir de la que nos entrega el
motor. Se ha seleccionado un piñón de 12 dientes que es el mí-
nimo recomendable para velocidades medias o baja".4/(v"t Pla-
nos?yB.)
EI número de dientes de las ruedas o piñones para cadenas, debe
ser tan grande como Io permitan las condiciones del proyecto. Un
número elevado de dientes reducidará el ruido, el desgaste de la
,ol--'OBERG. Erik v JONES. F.D. Manual Universal de Ia TécnicaMecánicd. Barcelona, Editorial Labor S. A., L977, p.967
52

cadena en la rueda y la pérdida de energía por rozamiento.
Las ruedas con 8 o 9 dientes pueden destruir Ia cadena ( )
La razón entre la rueda rnotriz y la accionada no debe sobre-
pasardelaB.
Pare. la rueda accionada se asumió una de 18 dientes.
3. ?. 1 . F'az6n entre rueda motriz y rueda accionada.
RuedaMotriz =l_12 --g =i=2Rueda accionada 18 I 3
3.7.2. Paso de la cadena y velocidad de la rueda
La velocidad máxima de la rueda pequeña debe tenerse en cuen-
ta cuando se determina eI paso de la cadena. Una velocidad alta
de la rueda se obtendrá mejor con un p' so pequeño que con uno
grande.
Una larga serie de observaciones y experimentos ha demostrado
que el factor velocidad de la cadena, poco importa por si solo
53

para Ia acción destructiva entre Ia cadena y la rueda; pero
una alta velocidad de la rueda combinada con un paso grande,
se comprobó que era muy destructiva y ruidosa' por el cho-
quequeseproduceentrelaruedaylacadena'alasentarse
ésta. La intensidad de este choque crece en proporción al
pesodelacadenayalcuadradodelavelocidadconqueel
rodillo lega a la rueda Ll
3.?.3. Chequeo de selección de la rueda por RPM' Para
rueda de t2 dientes cadena número 40 con un paso de !12", Ias
revoluciones, del engranaje deben ser 1940 RPM y Ia rueda
montada como motriz gira a 654 RPM, luego pcr éste factor
está bien selecciona a^-U
3.7.4. Tipos oe Ro"d"s4/
Hayvariostiposderuedasdecadenaderodillo:
TIpo A Es sencillamente un disco con sus dientes
entallados
TIPO B Con un cubo a un costado
542tl; trbid,-'Ibid,Elroro,
p. 968p.9?3
p.0?6

z %A
FIGURA B Tipos de
TIPO
TIPO
Diámetro máximo del
menos eI paso.
3. 7. 5. Diámetros de las
Los diámetros primitivos
calcular por Ia fórmula:
241
- Ibid, p. 9?6
Ruedas
cubos a ambos costados
un cubo suelto
cubo de la rueda = diámetro primitivo
241ruedas de cadena-
de las ruedas de cadena, se pueden
C
D
con
con
55

D - P D =DiámetroPrimitivo-P fen-Gs-O''¡ P
N P = Paso de la rueda
N = Número de dientes
EI diámetro máximo de cubo o ranura se halla por Ia fórmula:
MHD = P ( Cot. 180'- 1) = 0,039 (ei pulgadas)
N
MHD=P(Cot.1BO"-1)-0.?60(enmilímetros)N
Diámetro exterior e interior de las ruedas de cadenas de ro-
dillos
D = P ( 0.6 + Cot. 180')ext N
D. D.dlnt P
Diámetro calibrador
Si una rueda de cadena tiene un número impar de dientes, el
diámetro de fondo modificado para eI calibrado de la rueda
puede determinarse por Ia fórmula siguiente;
D =diámetro-primitivop
D - =D Co 90 -d"calibrador "P - s -ñ- r
P = pasp
56

N = Número de dientes
Dext = Diámetro exterior
Dirrt = Diámetro interior
d" = Diámetro de rodillo de la cadena
3. ?. 6 Distancia entre Centros de las R,r"A"" 4/
como regla general no debe ser menor que 1, b veces el diá-
metro de la rueda mayor, no inferior a treinta (s0) veces el
paso, ni superior a sesenta (60) veces el paso.
3.7.7 Chequeo de distancia entre Centros
No inferior a 30 veces el paso¡
p = ll2 co = 28 pulgds. ll2 x Bo = cl = lb pulgadas.
15 Menor de 28, Co está bien
L 12 x 6O = C2 = 30 30 mayor de 28 Co está bien.
3.7.8 Ruedas Locas
251
Ibid, p. 976
57

cuando las ruedas tienen una distancia fija de centro o no son
ajustables, puede ser aconsejable instalar una rueda 1oca para
contrarre star Ia comba. La rueda loca debe colocarse prefe-
rentemente contra el tramo flojo y entre los dos tramos de Ia
cadena. cuando se aplica en el tramo tirante para reducir Ia
vibrac ión, debe estar en el lado inferior y situada de tal modo
que la cadena corra en línea recta entre las dos ruedas de tra-
bajo. una rueda se desgastará excesivamente si eI número de
dientes es demasiado pequeño y la velocidad demasiado alta,
porque se produce impacto entre dientes y rodillos, aunque Ia
rueda loca no soporte ninguna carga.
3.7.9 Materiales para las Ruedas de Cadena
Las ruedas de menos de 25 dientes deben ser preferentemente
de acero Brinell para velocidades próximas a b90 pieslmin. 6
180 mts. /min.
Para velocidades mayores de 590 pies/min., acero de 0.20 de
carbono, cementado, templado y revenido ó acero de 0. 40 ó
más de carbono tratado térmicamente y rever ido, estando Ia
dureza entre 300 y 450 Brinell.

Las ruedas mayores pueden hacerse de acero sin tsrrplar, ba-
rras fundaidas ó forjadas, según eI servicio a que estarán suje-
tas.
3.8 VERIFICACION O CHEQUEO DE SELECCION DE CADENA
Asumimos cadena número 40.
Según Tabla 10 de Cadenas
Número cadena = DiPaso = tl2i0 rodillos = 5116
Ancho rodillos = Slt1jResistencia media de Tensión = 3.?00lbs.
Velocidad límte = 2.300 pies/minuto.
EI piñón menor lo asumimos de 12 dientes.
3.8.1Velocidad Lineal de la Cadena
V = N.P. n para nuestro caso: N = RPML2
P - Paso
n = Número de dientes delpiñón
vt"den" - I\' P n V"adena = 9?6 x o'5 x 12
n caqena rz
Vcadena = 488 Pies/minuto
Luego esta velocidad es correcta para nuestro caso ya que la59
tlnivcnidod dufonomo de úkcidoota
Depto Brbiiotro
-.r€ :)--=-- -!<rE- elór
Cl=T -dñua-, r-€!a¡É -6ó-clcl -Óq
ht3 d€N €-hv Nd9 T€- r_ cl 3- cl.1 "13=-
:--i-'^N
^l-ñ
l
€r?
CIC
ú
i.t-=IIl^I-lnt--t-It-l-t-¡-t-IIl^lñt1t^.t-L_II
l¡
t-I
li| ^l
rd!-
r-f¡-- ^-r-c¡é.-.f^
d-a €a¡r--- -:6Íra a-$
ñ- e¡¡6ñ€ -a€-dd ñ-t
t-:^f a¡ ' : -4
a^¡f\-\-l'^:-c-,->)i>E _ ^t _
: l:
.2 : ?
:::=:-l' - - l-l.. :
=i-¿::- -:=<-Áz' k:l{r
q
q
::l:3,^:^.-at-:ai
-.J.-, -.f ; 3.^¡-...-:!r--'_,_'-.c|.|
===: i F-a=. :=1.:-__tñ¡^¡ar_
'= :1¡-.- -)-j-^-,J-'==:r-:::Err¿'^
=-f'-n:t :-l
a-:^¡¡::c¡-l-€:=== ::--alr'--ln
4
^\l'tl¿. I!i,^.t=
:l...4r- | ¿ 5 .¡-, i=--
cla . ¿ a : .t f J -
1
60
=IvJ '=
n.r\ a
'i5r=o'!alr.rl á
av!9sS{\JJ
(t)rr{ :
(gN.H
IH<9=
H
^a=7. :ú2
-9fñ
Y .::
I !o
u!-d==vua
vr--Jd.-:
d -id
=

velocidad límite para esta cadena es de 2.300 pies/minuto'
4BB menor de 2.300 lPies/minuto)'
3.8.2. Potencia que puede transmitir la cadena
Hp = o. oo4 (Nrr) 1, 08 no, I p(3-0, o?P) ( )
Hp = 0, 004 (12)1'oB (9?6)0'n o, 5(3-0' 0710' 5)
Hp = 0,004 (14,6391) (490.34) 0,5(3-0' 035)
HP = 0.004 (14.6391) (490.34) o, 52' 965
HP =(0, 585564) (490, 34) (0, 1280?)
261HP = 3,67
De esta forma también comprobamos que la cadena está bien
seleccionada pues puede transmitir hasta 31 67 HP y nosotros
solamente vamos a transmitir 0, 5 HP 31 67 HP mayor de
O, 5 HP, luego está bien.
N = Número diente rueda menortS
n =RPM
P = Paso
261
- FAIRES, Virgil Moring. Op. Cit. p. 610
61

3.8.3 Cálculo de la Potencia de Diseño
rdiseno = HP motor ' Ks
Ks = Coeficiente de servicio
Motor eléctrico- Ejes de Transmisión-Carga moderad" K"= I,2
Ks lo extraemos de Ia Tabla 11.
A este factor (K") de servicio, le podemos restar O,Z ya que su
funcionamiento no va a ser constante, sino intermitente, además
que va a trabajar en un ambiente seco. K"= 1,2-0,2 K"=1,0
HPdir"no = o' 5x1' o HPdiseno = o' 5
62

TABLA 11. Coeficientes de Servicio.
srrrrrur fl,2 r lrtr r¡¡l'rcr ¡l¡rrlr'|\ l'¡rr¿r t¡rt¡¡ rut;¡:i:';::..:,i:.liltti:],,::::ill;::1":;:r"Tli::::l;lll,l,,lf
t,;j,,::'',,:."';l:";,,:l'lJl";,,1',";i, j;i";1,;1,;:,;;; llffii-:l*i":ll"lf:, j,""1,,,ii:li:c(,trtirrr¡¡¡ lrrr¡r! 'rc tt' t"ll.ll,,,tl.",a;,,,,; ;;;';i'"i iurr..¡,,,,,itrricrrl. cs- ttrrrtplclatrtcttlcIr)(¡¡; lrrrl!t¡ll\it¡t¡ts ¡tetl' .,-...-^..^..- -;;;;,.,.,,r,rrr ti,rnlitros ntCdios del:l;l;,,1i;:::::"1i";;:',1;;i:i,l;lil'l i,"ilj'"."¡i'i:.¡;:"i:i:f:ii';::),,::lili",H,,:[Xil:",:l:iiltcrtttlf(lllÜ .l (lc lclllprrr¡trr¡¡' '-¡r¡" "'-"-'-"'-l¿"uicit, ittctrrlirrtrl() ¡triltcip:rllllerrlclu\ \ill,rrr! rlllc srj clretrctlll¡¡l¡ trl t" 1it::i:-"i:..] r-.¡nr.r¡rirlulcsi si¡r cr¡rb¡¡r-l:l,,l"J;il::,lli::?i,::'l;l;';i',::l ;;,",;;;;;;;l;,;"_.::t::::::,:,,fÍ::I',',',','.il,si..
c.'';r';i'tr''ttfer'r! (rt't' "'") t '" t;";;t;;;t;itt;t clctt¡e¡¡los tlc lr¡¡rrs¡r¡isió¡¡'go, ¡trturlctt scrlir tlc gttt
ItÁqtrtl,rs cuNl)('crokAs
h!otLttts t'l¡tltitos I lluto'"t rléctricos""¿:..a'-1,^"
li,tr,irtu 1 C A. nottolásicos law¡t'ultt
C.¡1 . .1'' ¡uult ur' i seile' ',i,i,,,', ,'.,, ttt'¡ttt(l,i r ''' ulttt ¡xtr o dtu ittli'
| )i¡r(,¡¡lr¡i (rl I ztnivtttoMAqulNAs
coN¡JUCt lf A5
r\ gttarlott:, liqtlttltll:r(i.r(lo¡as ¡)rfa lcYd)'l tatl:potlarlotc5, clnl)d(lt¡ul'rrlttr'¡\-l',Ilr(lt it(lol ls, l(-rl llo\'l orrtos o trtáqitittu: Jc lo:''rt
l¡cqttcño: vct¡lilutlo¡c: lril5l¡ l(| ( \'
.lc c¿tluttu si¡rfi¡r con arrastrc ' ''lrituradora:, machacutJoras, etc
lrlolino: (lE martillos ' :
f¡ulv c riz¡,lo¡a s
ll('n¡btrs (ultcrnutivas)l¡urtl(!rl¡(lul us, PrclISas| | el lec)I atl¡lrt¡les cla:tlicatlotcs, crll¡d(l(¡lr!
lvlt¡lir¡o: ltrllt¡latc5.
( utltplc50lc5 y solllu'lotu: (!l"rl{'lrrr\r I
'l tat¡)polt,rdolc: rlc lttll¡cl'ti' "r' t"'l)irtanro: Y altctttarlutc:lijes ttc tratrrtrll\i!5ll (¡ tlc li¡'u'r
I
ir1 áqrrirtus'hcrti¡tI¡iunt¡: (otl 'rr I i
Nlir.¡ttittas tlc ittt¡rlttltttll,ril)l)ils (8triltol¡d5l :
( i¿¡ll¿rloru:._ .1 ._ : _
frl ulil¡us tlc bt¡lu ¡
Nlc/.ld(l()lüs (PaPct¡
Sicrrl: ci I ctllarcs( orltl)rcrulc\ (altcrttaliv<ls)l'ra,,r¡,otru,ltltcs, dc caf¡Bllutlc5' tlc I
t,all.l¿ alt¡cutrda, tlc torltillU :ittlitr' I
rl
rl
1,2
.¡
t,61,4
( ilbrc!lJl¡lc5Vurrt il¡.ltlt crV c rt I il,l,l.r¡ .:( ()rrttllt¡.t\ rlc
I a¡¡,1¡r¡¡ er .,l( c li ,l ! ( (l{, | .r t,
o lot¡)os i¿ttlol cs
¡lc rltt¡las.lc ¡ceirltt tll¡cclu
Ittlrtl¡¡¡tilus .lu ll()t'r!t(;ll
t lc^tllc\!
t,6
I
63
l,ü

4. DISEÑO CAJA DE VELOCIDADES
FIGURA 9. Esquema Caja Velocidades
Sevaa
rectos.
N =53a
N =38f
diseñar una caja de velocidades con
movidos por un manubrio. Sistema:
; N = 4B;N = 38;N - 48;r':'¡ =
bcde
6 piñones cilíndricos
Ejes paralelos. : i
61
64

Movimiento Manual = 20 RPM
Relación de velocidad = 517
Piñones cilíndricos rectos = t4-L12"- aIhura completa
4.!. CALCULO DE POTENCIA PARA MOVER LA CAJA DEVELOCIDADES
Se le aplica al manubrio una fuerza de 3 Kgs.
T = F.B = 3. Kgs. x 2.21 Ibs. x 6 pulg. f = 39,61 pulg.Kgs.
HP = T x n = 39.0t lbs/pulg. x 2O RPM Pot. = 0, 125 HPog. 0-00
A sumimos P = t2 (paso ordinario) por ser más común
T = torque
n=RPM
4.2. CALCULO DEL DIAMETRO PRIMITTVO DEL PIÑON A.
ND_^ -A =53=4.417pulg.P,.P:,.2
4.2.L. Cálculo de velocidad del Pinón A.D
PV = x -A x n =PA12x 4.417 pulg. x 20 RPM x pies = 23.12 pies/min.
12 pulg.
65

39.6 tbs/pulg.4.4t7 l2 pulg.
4.2.2. Cálculo de la l-uerza tangencial del Piñón A.
_T = t7.930 lbs.
A P12
4.2.9. CáIcuto de Carga Dinámica o ReaI del Piñón A.
600 x V-F = tA x FAt
600
= 18 . 62 lbs.
= 600 x 23. 12 x 17.93600
= Fuerza dinámica
4.2.4. Cálcuto del Paso circular del Pinón A.
= 5lx 4.4t7 = 0.261 pulg.53
A
Fd
Fd
N
A
(
N
NB
4.2.6. Límite de Fatiga Recomend"do4l
27 1
-' sHrcl,Eyd "t*"fft rliy;r;d r.?"r"ecto
en Ingeniería Mecánica . México,
66
P =9Td
4.2.5. Valores de factor de Forma del Piñón A.
) Con ángulo de presión = t4-112" - altura completa :
¿ Y - 0.349
Y - 0.343

g = acero cementado ASSAB 760 = 55000 PSI (cerrentado)
2S ._. = 55000 x 0.349 = 19195 lbs/pulg.y prnon
S = 55000 x 0.343 = 18865 Lbs/pulg.y rueda
a=2Ng = 2x48 =0.495Np+Ng 53+ 48
^2K=b" Sen0 (1 + 1)
L.4 E Epg6 281
E -E =30x10Pg
$; = 30000 PSI (Esfverzo estático - Fórmula Lewis)e
2K = (30000 PSI) x Sen l4-1l2"(! * 1 o = 10.62^oot.4 30xI0- 30x1
4.2.7. Cálculo del Espesor del Diente A.
Fd=d b QK b=FdP dQK
p
18 . 62 Ibs.b= é7 | = 0.80164.477 pulg. x 0.495 x 10.62
9 <b qt\+ I a7.09413 +0.75pp12t2
281
- Ibid, p. 621
67

4.2.8. Cálculo Carga Diseno Pinón A.
tO (diseño)
-Se
> F.d
byp
\
(lewis) Fb = F = 30000x 0.8 x 0. 349 = 698 lbs.bT
698 lbs. >) 18.62 lbs.
4.3. RPM DE LA RUEDA
t b b3 = tb
Y PIÑON C
nh=22RpM=rcNa=N.
D
d=p
b
4.3.2.
2048na
4.3.1. Diámetro primitivo de la rueda B.
Límite Fatiga Recomendado
= 22 RPM ; N = 38; y = 0.33c
y = 0.3468
48 = 4000 pulg. V_ = j(* 4 x 22 = 28. 12 pies/min.
-rz oo r
Carga de Diseño de la rueda B.
30000 x 0.8 x 0.343 = 686 lbs.Tuo t) to
4. 3. 3.
n=nbc
N =48;d

y = (Factor Forma de Lewis)
S =55000 x 0.33 = 18.150 PSIv
c
S = 55000 x 0.34 = 18.700 PSIY"d
a=2x48 =1.11 K=10.6238+48
4.4. DIAMETRO PRIMITTVO DEL PIÑON C.
d =Nc = 38 =3.16pulg.VPp:.2
c
J[-* g .16 x 22 = 18.2 pies/wtin.P"n
T = 63000 x HP = 63000 x 0.0125 = 35.79 lbs.pulg.n22
4.4.L. Fuerza Tangencial del Piñón C.
F = 35. ?9 lbs. pulg. = 22.65 lbs.t@c
4.4.2. Carga dinámica det Piñón C.
F =600+18.2x 22.65 P=23.33 lbs.d
-600 -4===========
4.4.3. Carga del diseño del Piñón C.
F- = S b Y = 30000 x 0.8 x 0.33 = 660 lbs.h
-
L',ept2
tlniarsido¡ Aulonomo dt kcidcote
0epto $¡[hsteto
69

F (660 lbs)2F (23.33 lbs.)bd
4.5. RPM DEL PIÑON D Y E
nc= Nd N-38x22 =L7.41 RPM=tl
n Nc d 48d
Ne=61;y= 0.356 N =38; y=0.33f
4.5.t. Diámetro primitivo y velocidad tangencial del Piñón E.
d = 61 = 5.08 pulgs.p
-Lze
V = 5fx 5.08 x 17.4L = 23.15 pies/min.PnT = 63000 x 0.0125 = 45.23 lbs.pulg.T
4.5.2. Fuerza Tangencial de E.
F = 45.23 lbs. /pulg. = t7.80 lbs."^ 5.0812 pulg.e
4.5.3. Carga Dinámica de E.
F =600x23.15 x17.80 F =18.48lbs.d 600 4============
70

4.5.4. Carga de Diseño de E.
F =30000x0.8x0.356 F =7t2 lbs.bT b
F (7tz rbs. ) ) F (23.30 lbs. )
bd
4.6. RPM DEL PIÑON F.
ne = ry ; n = 17.41 x 61 = 27.94 RPM
nNEf38f
d - 38 = 3.16 pulgs.pn
V = Jtx 3.16 x 27.94 = 23.t2 pies/min.pnf
T = 63000 x 0.0125 T = 28.18 lbs. pulg.m-4.6.1. Fuerza Tangencial del Piñón F.
F = 28.18 = t7.83 lbs.twf
4.6.2. Carga Dinámica
F = 600x23.72 x1?.83 F =18.52lbs.d 600 4=============
7L

4.6.3. Carga de Diseño
F = 30000 x 0.8 x 0.33 F. = 660 Ibs.b T =i===========
F (660 lbs) F (918.52 lbs. )bd
4/1uid, p. 621
4.7. TENSION DE FLEXION POR LA AGMA EN UN DIENTE
t - Ft Ko P Ks Km Ft = 18 lbs. | = 1/2 pulg. P - 12wKo = 1 (uniforme -uniforme)
Kv = t (carga dinámica depreciable)
Ks = t.25 (engranajes - bastos- cementados)
Km = 1.6 (b = 0.5 pulg. - menos exacto)ro/
J = 0.43 (53 y 48 T - Punto más alto)3'
t - 18 lbs. x 1 x L2 x t.25 x 1.6 t - 2.009,3 lbs/pulg.2
Lo cual comprueba de acuerdo a la potencia a transmitir, que
está sobrediseñado sobre la tensión de llexión.
72

4.8 RESISTENCIALA AGMA
Sad = Sat K
ALA FLEXION DE LOS DIENTES SEGUN
1x1 x2
Sad = 25000 PSI
Sat = b0000 pSI (450 BHN :7
K -1(vidainfinita)L
- 1 (temperatura baja)
- 1 (confiabilidad 99%)
52R)cKK
tr
Sad = 5000
S
x1
KT
Kr
F -2s
Luego los Piñones están proyectados satisfactoriamente.
S <a< sad
4. 9 TENSION DE CONTACTO SUPERFICIAL SEGUN LA AGMA
G=c Ft Co Cs Cm Cfp
2 300
CvDbI
acero-aceroC
C
r*
C
D
b
=
p
=
o
=l
= 4.4L7 putg.
= t 12 pulg.
1.0 uniforme-uni-forme
1,0 carga dinámica no apreciable
73

Cm = 1. 6 menos exacto
Cf = 1.0 Engranajes cilíndricos
D^ = 4.417 pulg. = 1.10z llbd-D
1
Carga línea primitiva - L4-L12"; I - 0.065, Figura ( )
Ft = 18 lbs.
H = 2.300 18x1 x 1 x 1.6 x 1.0 - H =32.577.5?PSI. 065
4. 9. 1. Resistencia Superficial
SrCCH - 'e L H - 190000 x 1 x 1 = H - 190.000 PSI
ct )(% l-1
Sf = 190.000e
C = 1.0L
Ct - 1 (T menor de 121.5"c)
Cr = ! (99%)
S" =2.24O K K =9000t. 11
S = 2.240 9000 = 2t2.000 PSIfe
c-1H
74

s = 190.000fe
Fs = 212.000 PSI Fs = t.tZ190. 000 PSI
Este coeficiente de seguridad indica que el diseno es correcto,
por 1o tanto el desgaste no origina problemas de funcionamien-
to, 1o que da una confiabilidad deL L2To.
4. 10 DATOS PARA CONSTFIJCCION DE PIÑONES
"" (pago circular) =
==s.=' = 3.Lf;6 = o.262 pulg.
P (PITCH) = 12 por más comercial
D. ext. (Diámetro exterior) = lrJ * 2
P
Juego (J) = 0.157 = 0.167 = 0.0120 pulg.P12
S (altura de cabeza) = Pc = 0.262 = 0.833 pulg.I¡
S- (Altura de pie) = 1.15? = 1.15? = 0.0964 pulg.t*n
H (altura total) = 2.757 = 2.t57 = 0. 1797 pulg.PN
30/P^ (profundidad del dierÉe) = H * J = 0.L797 + 0.012 = 0.191 pulg.-
D
30/Ibid, p.621
75

T (Grueso Diente) = 1.5706 = 1.5706 = 0.131 pulg.PN
4.10.1 Datos Para Piñón A.
53 dientes
PICTCH = 12
Pc = 0.262 pulg.
T = 0.131 pulg.
P = 0.191 pulg.D
A = \4-112"
d = 4.4t7p
D - d + 25 = 4.417 + (0.833) = 4.583p
,.D = p 2P = 4.583 pulg. - (0. 191)- = 4.20t pulg.
ext D
4.tO.2. Datos para Piñones B Y D.
48 dientes
PITCH = 12
PC = Q.262 pulg.
T = Q.131 pulg.
76

PD
o
dp
D
= 0. 191 pulg.
t4-L | 2"
4,000 pulg.
=48+2=4.L66 pulg.t2
= 4.166 pulg. - 2 (0.191) = 3.784 pulg.
ext.
Dint.
4. 10.3 Datos para Piñones C Y F.
38 dientes
PITCH = 12
Pc = 0.262 pulg.
T = 0.131 pulg.
D = 3.16? pulg.p
D =38+2 =
ext tz
P * 0.191 pulg.D
A = L4-L12"
D = 3,333 - 2 (0.191)int.
D = 2,95t pulg.int.
4.L0.4 Datos para Piñón E.
3,333 pulg.
61 dientes 77

a
d
PITCH = 12
P = 0.262 pulg.c
T = 0.131 pulg.
P = 0.191 pulg.D
= t4-t12"
= 5.083 pulg.p
D_ ,= 61 + 2 = 5.249 pulg.ext n
D = 5.249'2 (0.191)=4.867 pulg.int.
4.LL. CALCULO DE REACCIONES SOBRE LOS SOPORTES DECHUMACERAS
F=Ft TangS; Ft=r
33000 HP ; Fr = 33000 HP Tang. A
Fr
Fr
Vp
Fr
F
C
E
p
= t7.93 Tang L4-t12" =
= 22.65 Tang t4-Ll2' =
4.63 Lbs =
B
5.85 Lbs = FrD
Fr = 1?.80 Tang L4-I12" = 4.60 Lbs = Fr
7B

tvlA.
P="x1
0 17. 83
2. 9? lbs
Al
x3-IBBx=0
Ar¡ = L4. Bb lbs.--'-1
4.63 Lbs
les Lbo
BX
I
Un*"'¿o¡ Aulonomo Úe ftcidento
Depro Bit¡iroteto
Bx
¿
MA1
BYt
4. 63
o. 77
x3lB
Lbs.
By1
AYt
-0
3. 85 Lbs.79
4.ar u 5t
t7.8? tLs
zz.es Lbs

b¡<
3
M -0A2
1?.83 x 3 + BX t8-22.65 x 9 = 0
.Bx = 8.35 lbs. Ax = 3.53 lbs.
M -0Az
4.63x3-5.85x9+BY18-0By = 2.15 lbs. AY = 0.93 lbs.
M- - 0A3
22.65 x I - 17.8 x 15 +BX 18=0
Bx = 3.5 Ibs. Ax = 8.35 lbs.
4
9x.
I4r. - o
-35.85 x 9 + By 18-4.6 x 15 = 0
By = 0.90 Lbs. Ay = 2.15 Ibs.
80
5.85 LbJ

M. -0A
+
1?.8 x 5 -
Bx = 14.84
M -0A4
4.6x15=
BY = 3.83
encuentra en el punto esfuerzo
3 Pulg. = 11.55 Lbs/Pulg.
81
18 B x =o
Lbs. Ax=Z.96 lbs.
By 18
Lbs. Ay = 0.76 Lbs.
4.t2. DIAGRAMAS DE ESFUE'PIZO CORTANTE EN LOS EJES DELA CAJA DE VELOCIDAD
Momento máximo se
M = 3.85 Lbs. xmax-
cortante 0.
o.17

Momento Resistente =
Considerando las fuerzas que actúan, asumo una tensión de pro-
yecto te I de 120 lbs/p,rlg.2
3
_g-ff (momento resistente/sección circular)32
= 0.09625 putg.3
= 0.993 pulg.
Luego D - 1 pulgadaeles
4.T3 PROYECTO DEL CIJBO DE PIÑON
3rlSegún Shigley no hay reglas generales para proyectar - , cubos,
luego acogiéndonos a los parámetros dados proyectamos una lon-
gitud igual a 314 pulg. para obtener una longitud de chaveta sufi-
ciente, además de transmitir el par a través del cubo sin con-
centraciones de tensión importantes.
Se recomienda que el diámetro delcubo sea dos veces el diáme-
3tlIbid, P.622
n/fIYImax.Tc
B
C
I=C
11.55 lbs/pulg.
82

tro del eje, por 1o cual damos un diámetro de 2 pulg'
El chavetero debe ser aproximaü mente eL 25olo del diámetro del
eje;loquedaríaunadimensióndet|4depulgadaenestecaso.
83

5. FRENO
5. 1 TIPO DE FRENO
Aro con zapatas interiores.
Material del Aro:
Material de las Zapatas:
(Figura 10)
Fundición
Asbesto moldeado
29" ¿go
,?40
FIGURA lOI'reno de Zapata de Acción ExternaB4
(Tabla 12)

Éc¡:c
L?,=sLc
j; ¿
:.= -tQc u
:5 E'=-o E.59 0tE o<0 üc! EE- t
r_> ¡=l =YZ c
=. :;F
:c J ú-:=s-= : :=: t !==
c =
e-i : .:=N: : -.úé.=
= €Fxu^oÉ i :-c : a
i:€ Za= < Q
€- e :
,O : =rE - c
{': '- v-c 3 a
'? z .9<: c ,!N= : ;-.j L,
= ó;9 ¿ a
tco¿o s B
A€ i A-gg.s E r
.::-GEr: a- o9< - ESE Ú P-o o t=
'nl ! r !Y é i:E i9::v.u-=o ;i:G;:6 ¿u:Y g "¿7::,9 E3 ¿
-'¡ 1c =-.o-G=P F Ui "d.E F Y:cu !=í
L}e f c d.-a9
< 3 c l-: =---=-cC o
F+ss-== iE=='i ¡:ti i!2,
=
=ÉE . Éil::! '?2É,i""íE=,.? í;.s:,'= I:;;¡;r :nÉ5;É-'¡É ¡
F;ÉÉ: Éi;FE:€ É:€l¡:?i; Éi:::: ti¡:iii ;;;;r=!;i Ii::;= ::::i:: ii:;'j:i¡ i
. : i::'_vc 5':F
, a c -e ¿= a :: =:: :-¡ { zz:? :
=é é ¡É.
=- N
-A^ ; -;--=3. t E;;E éN _r.
c > u-- ¡
=z¿.¿<
Nr.c-dNtlgeRSt
-a
I
Nú)ar-,N-;;ñ
N=-;;YYI €N-
-C-Cc -cic
!E
N
i E :iEE i: E s9 E! É tsÉs:!! s: i €ii Po E trcEcccc =c c Éc c o€ c c o c c c q9! c o o 6 c c c
== ü ¿Pr===E
== = ¡== ;
EE !E gEeE!:: :; : E:: =Ee €€;e:EE.;E eE E
=.ee .=9Eppp eEqEPg.e 9.o q fpP^ ce¡!qe uEE!!!..E u! i E!.Eg .5==<<< <=<==== r= = <¡-< =
-"É .€€{:'E!I o .Yt c
=:. z;Z: = :: =
= : -a : -- (i;;s.:=s
! i-7 ! o--:: f!.á =E< <:; !'
6 rEi s:.! ñ o=.;;=-==== - : - i
== i u-"2 F 't_ = = :=; _ =Z:9.= : :l_- "-._?t=í: ! ! L:: c:?i : .r! itziE:+É=
85
-oG
cU
c
6s--OCCCCÉV,s,F.cg-
= !n=-:-_?.vgv=\
c
zLE
Z/F =.
Ia
c
v.c,<qr-e-Ye-e_
= = 5 ¿5é- I r.6r¡
tJl0)5hnC!
C1
rit
ñH
rQ
H
G)rd
a
dg.lI!{5
=vc!ucd3
u
^rt Ea
'I
añ
t-r
S É,É r'r.
I
.cz
oo
a
t
6(!
G
,.

Superficies de contacto: Asbesto moldeado-Fundición
Coeficiente de Fricción en Seco: f = 0.2 a 0.5 (asumimos 0.35)
Temperatura¡ = 500o F.
Presión máxima = 150(f,u"ÉpofS.3
Ancho de Zapata = 1 pulgada
Nomenclatura;
P - Presión máximaa
0a = Angulo donde está Pa
f - Coeficiente de fricción
b = Ancho de Ia zapata
a = Distancia del centro del sistema aI centro de pivote
el = Angulo del centro del pivote adonde inicia material de za-pata.
$, = Angulo de barrido del material de zapata'¿
Mf = Momento de fuerzas de fricción
Mn = Momento de fuerza normal
C = Unión entre centro de pivote y cabeza de zapata
5.2 CALCULO DE FUEP"ZA DE TRABAJO
Averiguamos distancia (a) del centro deI sistema al centro del

pivot e por Pitágoras
Ia = l [(1.7sor' + (o. tBTs)"J purg.
a = ,l s. oob + o, o3b1b6z
a = .l s. oszoosz putg.z
a = L.76 Pulgadas.
calculamos el momento de las fuerzas de fricción en eI punto A.
La zapata del lado derecho es auto-bloqueante ya que se opone aI
sentido de giro (hay posibilidad de que F = 0).
Para hallar la fuerza F debemos considerar que la presión se
produce en la zapata.
!?t )Sen0(r-aCose)de | /
Para el caso de este freno:
01= 0 t, = L24" 0" = 90o (donde la presión sería Ia máxima)
ñT-- SHIGLEY, J.E. Diseño en Ingeniería Mecánica, Op.Cit.p.60g
87
x
0
fPabSen
Mf= 1r
a("
),,
Sen0"=1
Integrando de 0
/Mf = fpa ¡.r
senr-a
Mf= Pa b'f f
1 = 0 hasta 0, = t24"
- a Sen2 g, )2'
senae l
')
Cos o, - alz Sen2 gr. ) |')
[t " co" eJez - ^fr,
0 ;'l
Sen P"
Mf = 0.35 x 150
(r-r
lPvLg.z
tbsL
Mf=
Mf=
Mf=
Mf. =
(r-r - Cos 0,
111,5625 Lbs
se.r2 (tz<¿)
111,5625 Lbs
111,5625 Lbs
3O2, t6 Lbs-pulg.
5.3 MOMENTO DE FUERZAS NORMALES
Mn=PebraSenl-
a f::Sen2
88
(2, 12Pulg. - 2, 125pulg. Cos (t2a)-1, ?6 p"Ig.
(2,!25 pulg + 1,1BB2B51 pulg.-0.60482?b pulg).
(2.7084576 pulgadas).
d9

Integrando de 0 = 0 hasta 0 = t24"t2
Mn=Pa.b.r.a f-9 -1 sen2rlt'sen o t2 4 J
a ,g \oMn=Pa.b.r. a( 2 - 1 Sen2o )
sen o-\2 Z 2/a
Mn-t
+
/t24" nr-1 sen2(124))(,-f 1Bo 4 /
Mn = 561 lbs.pulg. ( t.oaz - 1 sen (zas))\4/
Mn = 561 lbs.pulg. ( t.O* - (-0.231?96) )\/
Mn = b61 lbs. pul g. ( 1. 082 + 0. Z 31796 )
Mn = 561 lbs.pulg. (1.3139001)
Mn = 737.t lbs.pulg.
F = Mn - Mf (auto-bloqueante) donde C= Unión recta entre centro1 C de pivote y cabeza de zapata.
C = 2 + L.75 Q = 3.75 pulg.
F = (?37.1 - 302.16) lbs.pulg..F = 434.94 lbs.t ,t F
* : Este dato está en grados y hay que restarlo con númerosreales. Se conviete a real.
89
lfniwnidod Autonomo de &odñ¡fo
0eOto $rfli¡tor4

)l)
pu
p
s.
40
s.
1g
Ibs
,pu
t2o
lb
Ib
.p
0o- Cos (
ffil;248.35?81
248.3578t
387.24 lbs
tg
(C,
Pu
T
T
T
F = 115.98 lbs. (fuerza que se aplica en la cabeza de la za-1 Pata lado derecho)
5.4. CALCULO DE LA CAPACIDAD DE FRENADO
5.4.
J=Sen 0
a
T = 0.35 x 150 Ibs. /pulg. x 1 pulg. (2.175 pulg. )
Analizamos Ia zapala de lado izquierdo. La fuerza en esta zapata
debe ser menor que la del lado derecho por ser no autobloquean-
t€, como consecuencia su capacidad de frenado también será
menor que la del lado derecho.
(Mn) (Pa) (Pa)2 - 2 .Mn - 2 (Mn)
]M (p") ? z (p") 1
n)l 1 1
331
- Ibid, p.608
1. Capacidad de frenado en zapala.lado derecho
f.Pal.b.r.2(Cos e 1 - Cos gr)E/
(1- (-0.55e. re3))
. (1.55e1e3)
1g.
uIgpu
90

Mn = 737.1 rF". p"lg. (P") 2 ; Mn = 4. 91 pulg.3 {e"r)2@'2
Como : F = Un + N4_no autobloqueante2C
(Mf ) ^ (Pa).sabemos que : ,#
=;#r1
(Pa) ^(Mf) =- (ur)' 2 (Pa). 1I
(Pa)(Mf) = 2 x 302. 16 Ibs.PuIg.
¿ t50 lbs . lpulg. á
(Mf¡^= 2.0L44 pulg. t ("")z2
Mn-Mf Mn +MfF = ! 1;p= 2 2 Si F -F
t2
F = F = 4.9r4pulg.t,t", z + 2.or44pulg.tt"")tt2.
(Pa). (4.gt4 + 2.0144) Pulg.3F=lr-r=á- 1 'Z B. Zb prltg.
1C2C
(Pa)^ (6.9284) Pulg.3F=F='
'2 = F = F^ = (pa)^ x ln 8475733 pulg.7 2 3.?5pulg. t 2 2
Como F = 115.98 Lbs ? (Pa) = 115.98 lbs. 2 .t 2 7.8475733 Pulg.
2(Pa) = 62,78 lbs. /pulg.
2
Para la zapata del lado izquierdo si quisiéramos podíamos usar
un material diferente al de la zapata del lado derecho (por ejem-
plo, que fuera más económico), pero realmente no se justüica91

la economía que se gane con el material si en otros procesos
vamos a tener düicultades. Además, es conveniente que esto sea
estandarizado, ya que la presión máxima para Ia zapata del
Iado izquierdo nos dió un valor mucho más bajo.
5.4.2. Capacidad de Frenado en la zapata. de lado izquierdo.
2T = f.r. . (Pet ¡n ''2'- ( cos or - Cos oo)- SenO
a
T = 0.35 (2.1?5 putg.)2 oz.?g lbs./pulg.2x t pulg. (Cos 0'-Cos 124")
2
T = I03,946 lbs.putg. (1 - (-0.559193))2
T = 103,946 lbs.pulg. (1+0.559f93)2
T = 109,76 lbs. pulg.2
T =T*Ttotal t 2
T = (387.24 + I09.76 lbs.pulg. )
total
T = 496.48 lbs.pulg. (capacidad total del freno).total
92

5.5. CALCULO DE LAS REACCIONES EN EL PIN DE LA ZA-PATA CON RESPECTO AL EJE Y.
,l:i"
sz)
- r [tl,
- tt4 r"'.r]o J-t
f1 sen2o )ll4 zJJ
2n (124'l
-l(- o.zsrzot iJ
()
Rx = Pa.b.r.sño
a
-t f ,t, - 1/4 sen 2
g2
o
,r]
-Fx-
[[',, sen
con el eje X,
Fx=FSen0
es decir no hayComo en nuestro caso Fx coincide
desplazamiento del pivote, entonces
Fx=Fxo Fx=0
f, , a"Rx = Pa. b.r. )lttZ Sen s
I
SenTII Ja f Lt-0
f,Y-
f'r, t"
(. 2ll1 SenOllz 2
(-
x 2.t25 pulg.
-0-Pa. b.r.
Reemplazando: Rx= -TÉ;-o'ó-
Rx = t5o lbs. /pulg.Z * L pulg.
o.3b (rz+rl - r sen 2 <rz\l2-x 180" T 'J
341Ibid, p. 609
Rx = B1B rbs. J o.rnruu, - (0.¡s I r.0821fLL
341
93

f A^ñr | ^ o -'l
Rx = g1B rus. [0.943652 - 0.35 (1.0821 + 0.231?9U
Rx = 318 lbs.Io.r+sosz - 0.35 (1.0821 + 0.231?9Ü
Rx = 318 rbs I o. s+sosz - 0.3b (I.21B8eG)J
Rx = 318 lbs. (0.343652 - 0.4598636)
Rx = 318 lbs. (-0.1162)
Rx = -37, 038 lbs.
5.5.1. Cálculo de la Reacción Total
Rv = P"' b r lro t, - tl.senZtrti r ( ttz r. ?of' -F
s""e L : o Ya-o
2Ry = 150 lbs/pulg. x 1 pulg. x 2.125 pulg' x
Sen 90"
f-o -r
l'zlz-tl4senzQ +f (1 12sen'20 ) I -FvL z 2-
Ry = 318 lbs. f tz¿ * I - 1/4 Sen (t241 +L 2xIB0
+ 0.35 (1/2 sen2 (tziJ I - F cos o'
Ry = 318 rbs. ftr.oezro+rl - (-0.231?e6) +
+0. s5 to. s+aos)l] - 115. e8 lbs.
Ry = 318 lbs. I r.313e + o-t202?84]- 115. eG lbs'
Ry = 3tB lbs. I t, +r+rzas] -[rr5, eB lbs-]
Ry = 456,06869 lbs - 115,98 lbs.
Ry = 340 lbs. 94

R
R
resultante =
resultante =
resultante
resultante
resultante
R
R
(37.038 lbs. ) + (340 lbs. )
1169?1.82 IbsS
342 tbs.
95

6. ENGRANAJES HELICOIDALES
6. 1. TIPOS DE ENGRANAJES HELICOIDA LES
Los hay para: Ejes Paralelos y para Ejes no Paralelos. Los no
paralelos o engranajes helicoidales cruzados, Son aquellos en
que las Iíneas de centro de los ejes no son paralelos ni se cor-
tan.
Los dientes de engranajes helicoidales cruzados tienen contacto
de punto entre sí que se convierte en contacto de línea a medida
351que se desgastan las ruedas.-
Para el engranaje de ruedas helicoidales cruzados se debe cum-
361plir - -'
rn/-'Ibid, p. 538361
- FAIRES, Virgil M., Op. Cit. p.530
96

a. Tengan eI mismo Paso normal (Pm)
b. Tengan eI mismo ángulo de presión normal (/rn)
c. No es necesario que Ia inclinación de los dientes sea opuesta'
Como el contacto sobre un diente determinado empieza en un ex-
tremo, siempre con otros dientes en contacto, y lte go hacen con-
tacto las secciones subsiguientes del diente, éste toma Ia carga
gradualmente. La línea de contacto nunca está de una parte a
otra de Ia punta completa, como en los dientes de engranajes ci-37 1
líndricos rectos, sino que siempre es diagonatT
6.2. RELACIONES CINEMATICAS.CARACTERISTICAS DE ESTOS
ENGRANAJES, (Figura 11)
FIGURA 11. Diagrama Cinemático
37 1
- Ibid, p.52297

f=z=
Angulo
vr.ventre
(sit
+ t¡)'2
ejes de ruedas
ambos tienen Ia misma inclinación)
(si tienen diferente inclinación)z= q),1
-N N -.,
C = | f t 1 + 2 \ |
P- Lc;8, c*, P j
t, = v, sen V, + tr t"^ P,
Si Z = 90'?vv- I =
u'Cos yt , Ces gt,
Tl Dr cos t/tNt= tNz
Pcn
Las fuerzas que actúan sobre estos
tornillo Sin-Fin. (Ver Plano 9)
U = Ansulo de héliceI-
C = Distancia entre centros
Pm = Paso normal
Vs = Velocidad de deslizamiento
N = Número de dientes
D = Diámetro Primitivo
Pcm = Paso circular normal
= TIDz cos V z
engranajes es análoga al
e = Rerdimiento

6.3 RESISTENCIA DE LOS DIENTES
F = s.b.Y 381
s KP,fon
6.5. CARGA LIMITE DE DESGASTE
6 .4. CARGA DINAMICA
,Fd = F't' + 0.05 vm (Ft +e.b.cos¿ P ) cos,/ lú.s.
-t'-Tl
,
0.95 vm + (Ft + c.b.Cos¿ ty f tz
Fw = b. Dp.Q. Kg. Libras,Cos'Y
381
Ibid, p. 52 6
[JntsasiCod lulonomc dr 0rcidente
Depto Erbiroteto
oo

7 . CONJUNTO CORONA SIN-FIN
Estos engranajes se emplean para conectar ejes que se cruzan
y normalmente lo hacen a 90i no exi ste razón alguna para que
no puedan conectarse ejes que se crucen a un ángulo diferente
en el caso de que eI proyecto lo t"qti"t".E/
EI Tornillo Sin-Fin es el elemento que tiene los dientes en for-
ma de filete de tornillo ordinario; se conoce a estos dientes con
el nombre normaLízado de guías. Los tornillos Sin-Fin de em-
pleo común tienen una a ocho guías (Ver Plano 10) y no existe
relación definida entre el número de guías y el diámetro primi-
tivo del tornillo. se pueden proyectar cor¡ superficies primitivas
cilíndricas como Se ve , o bien tener una forma aglobada, tal
que el tornillo Sin-Fin abra ce o envuelva parcialmente a Ia rue-
da. En el primer caso, se trata de un tornillo recto y en el
3e/- SHIGLEY, Josep Edward.
la. Edición. México,Análisis Cinemático de Mecanismos-MeGraw-Hill, 1979, p. 321
100

segundo caso, de un tornillo hiperbólico'
En general,
ma permite
se engrana
ción Simple
la rueda es el elemento
que envuelva o rodee eI
con un tornillo recto, el
(Ver Plano 11).
conducido del Par Y su for-
pinón o tornillo. Si la rueda
engranaje se llama de Ac-
de simple acción Puede verse en
tornillo Sin-Fin con angulo entre
ambos el mismo tiPo de hélice a
valores de los ángulos de tas hé-
101
Se obtiene un engranaje de doble acción cuando el piñón es hiper-
bóIico, pues entonces cada elemento envuelve parcialmente al
otro; la combinación de un tornillo Sin-Fin y su rueda, es aná-
loga a un par de ruedas helicoidales que conectan ejes que se
cruzan excepto en el hecho de que cada rueda envuelve parcial-
mente a la otra. Por esta razón el contacto Se presenta sobre
una recta, mientras en las ruedas helicoidales hemos visto que
el contacto es puntual; debido a esto son capaces de transmitir
más potencia. Cuando se utilizan engranajes de tornillo hiperbó-
lico se puede transmitir aún más potencia'
La nomenclatura de las ruedas
eI Plano 12. Un engranaje de
Ios ejes de 90! debe tener en
derecha o izquierda, Pero los

lices normalmente son muy diferentes. En el tornillo, el ángu-
1o de |a héIice es bastante grande y muy pequeña en la rueda.
Debido a ello es costumbre
para el tornillo y el ángulo
Conviene hacerlo así, pues
complementario del ángulo
rueda.
Para especificar eI
indica eI paso axial
especificar el ángulo de hélice I
de inclinación ,n para la rueda.
el ángulo de hélice del tornillo es
de inclinación de la hé[ce de Ia
paso en un engranaJe
del tornillo y el paso
de tornillo Sin-Fin se
circular de Ia rueda.
El diámetro primitivo de la rueda
da con diente ,""¡or9l
dg : Pt . Ng 6 dg = m.NgTI
dg = Diámetro primitivo
Pt = Paso transversal
Ng = Número de dientes
m = Módulo
es eI mismo que para una rue-
Ingenieria Mecánica,
to2
9/rrrr"""", J. E. Diseño en Op. Cit. p.540

El díámetro primitivo del tornillo puede tener cualquier valor,
pero siempre es igual al de la herramienta empleada para ta-
llar la rueda. La AGMA recomienda la relación siguiente entre
el diámetro primitivo del tornillo y Ia distancia C entre centros:
0.875d = 0.68C (m. m. )
1
0.8?5d- 1 Ct T.z.
(pulgadas)
Análisis Cinemático de Mecanismos, Op. Cit.
103
El paso de hélice en eI tornillo tiene el mismo significado que
en un tornillo ordinario ltl y es la distancia H que recorre
un punto de la hélice cuando el tornillo Sin-Fin gira una w eI-
ta. Cuando el tornillo solo tiene una guía, el paso de hélice es
igual al paso axial, y en general, se puede escribir:
H - Px' Nw 11 = Paso de la hélice
Px= Paso axial
Nw= Número de guías de1 tornillo
EI paso de hélice y el ángulo de héIice están relacionados por
Ia fórmula:
\= arco Tang. ). = Angulo de hélice
4-- SHTGLEY, J. E.
p.324
il+Tl dw

Las guías de los tornillos normalmente se tallan en fresadora o
en el torno.
Los dientes de la rueda se tallan normalmente por generación
c on fresa madre.
Excepto en el espacio libre del fondo de los dientes, el torni-
11o Sin-Fin debe ser un duplicado exacto de la herramienta con
que se talla Ia rueda, si se pretende obtener la acción.
por esta raz6n cuando sea posible, el tornillo debe proyectarse
de forma que tenga las dimensiones de los útiles de tallado
existentes para mecanizar las ruedas. Los ángulos de presión
utilizados en los engranajes de tornillo Sin-Fin, varían mucho
y dependen del valor del ángulo de héIice. Se obtiene una ac-
ción satisfactoria entre los dientes cuando eI ángulo de presión
es 1o bastante grande para eliminar la interferencia de tallado
en los dientes de la rueda. Buckimgham, recomienda estos
valores:
Angulo de hélice ( X) ( ) Angulo de Presion ( d')
o - 16 t4-tl2
16 - 25 20 LO4
25 -35 25

35-45 30
Una profundidad de diente suficiente, casi directamente proporcio-
nal al ángulo de hélice, s€ obtiene haciendo la profundidad de los
dientes proporcional al paso normal. Basándose en los dientes de
profundidad completa de los engranajes rectos, en los que el
addendun es igual al módulo, se deducen las siguientes proporcio-
nes para los dientes de los engranajes de tornillo Sin-Fin.
Addendun = 0.3183 Pn
Profundidad total = 0.6366 Pn
Espacio libre de
Fondo 0.50 Pn
7.T. ANALISIS DE F'UERZAS DEL MECANISMO TORNILLOSIN.FIN
Si se desprecia la fricción, entonces Ia única fuerza ejercida
por eI engranaje sería W que tiene tres componentes octogona-xyz
Ies: W, W yW
Por la configuración geométrica de 1¿ Fig.12 se aprecia que¡
w* = W Cos 0 sentr
wY = W Sen g r, (a) tob

W =WCosP cos I
Ahora se utilizarán los subíndices W y G para indicar las fuer-
zas que actúan contra el gusano y el engrane respectivamente.
Se observa que f¡/ "" Ia fuerza radial, o de separación, para el
gusano y Ia rueda. La fuerza tangencial que actúa sobre el tor-
nillo Sin-Fin W* y sobre el engrarre .s W', suponiendo que eI
ángulo entre ejes es de 90? La fuerza axial sobre el Sin-F'in es
W' y sobre Ia rueda Wx. Puesto que las fuerzas en eI engrane
son opuestas a las que actúan en el tornillo, estas relaciones se
resumen como sigues
v= \[ (b)
w
w
= - \j[/Ga
=-WGr
-w
wr
W =-W -Wwa
Al utilizar las ecuaciones
de la rueda es paralelo a
es paralelo a Ia dirección
derecho de coordinadas.
(a) y (b) es útil observar que el eje
la dirección x, que el eje del Sinfin
z, y que se ha empleado un sistema
gt
106

En el estudio de los dientes de engranes cilíndricas rectos se
vió que eI movimiento de un diente relativo al del diente embo-
nante es un rodamiento, prirc ipalmente; de hecho, cuando el
contacto ocurre en el punto de paso, el movimiento es una roda-
dura simple. En contraste, el movimiento relativo entre b s
dientes de gusano y rueda es un deslizamiento puro y, asú es
de esperar que la fricción tenga una función importante en el
funcionamiento de un mecanismo de Sin-Fin, introduciendo el
coeficiente de fricción se obtiene otro conjunto de relaciones si-
milar al de las ecuaciones (a). En la Figura se ve que la
fuerza W, ncr mal al perfil del diente del Sinfin, produce una
fuerza de fricción Wf = .[W, que tiene una componente /W.
Cos I, €r la dirección negativa de x, y otra componente/-W
Sen tr , €r la dirección positiva de z.
Por tanto, la ecuación (a) se convierte en:
xW = W (Cos0 Sentr+ y'Cos ,\ )
n
0n
0
wy
w (Cos
-w
='W
Sen
Cos I -lSen). )n
Desde luego, la ec uación (b) sigue siendo válida.t07

Si se sustituye W'en la tercera de las ecuaciones (b) y se
multiplican ambos miembros porrll, s€ halla que la fuerza de
fricción o rozafiaiento es:
wf =/w= My'Sen¡ - Cos 0 Cos)'
n
Hay otra relación útil que puede obtenerse resolviendo simultánea
mente la primera y la tercera ecuación de (b), para tener urra re-
lación entre las dos fuerzas tangenciales.
EI resultado es:
w -w fcosgn SenI+/'Cos)- (d)lwt ctl. r.J
n
La eficiencia N se puede definir por Ia ecuación:
w\r - wt (sin fricción) (e)
W (con fricción)wt
Se sustituye la ecuación (d), con f = O, en el numerador de Ia
ecuación (e) y la misma ecuación, sin cambio alguno, €r el deno-
minador de ésa. Después de reordenar resulta que la eficiencia
ES:
Cos P -¡ü"tang.{
(c)
N= o (f)
108
Cos 0n + Cot. I

llnn'€**rrVn- 7
FIGURA 12 . Fuerzas que ejerce Ia rueda sobre eI tornilloSin-Fin.
si se selecciona un valor típico del coeficiente de fricción, por
e jemplo¡
l= 0.05 y los ángulos de presión, se usará Ia ecuación f . des-
pejando los ángulos de hélice de loa 30o se llega a los interesan-
tes resultados que se muestran en la Tabla No. 1 . Eficiencia
de mecanismos de Tornillo Sin-Fin para :
,/=o.05
llni*nidad dutonnrno rie Orcidiflte
0eoto Brbi,oteto
109

ANGULO DE HELICEGrados
(y) EFICIENCIAo/o
(1,
1.02.55.07.5
10.015. 020 .025.030.0
25.246. I69.6?1.976.882.786.088.089.2
1..&/- L-Jtu ln)
FIGURA 13 . Componentes de velocidad en un mecanismoSin-Fin.
Muchos experimentos han demostrado que el coeficiente de fric-
ción depende de Ia velocidad relativa o de deslizamiento. En
Fig. 13 , Vg es la velocidad en la línea de paso de la rueda y
110
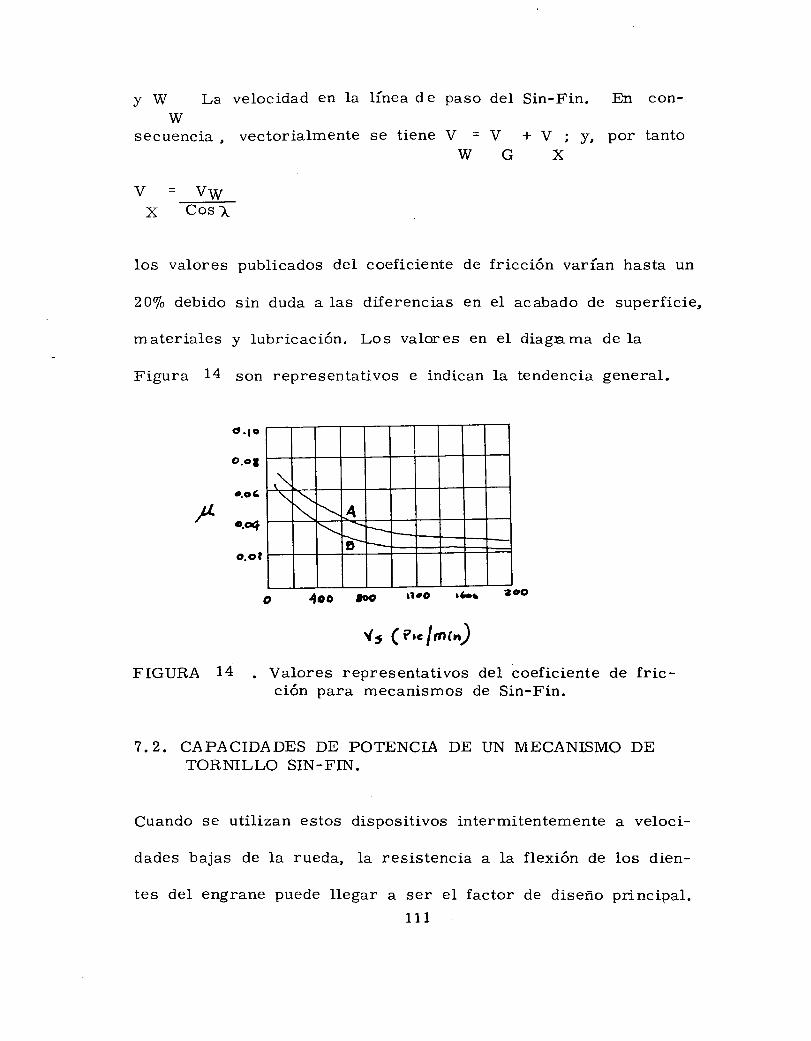
y W La velocidad en Ia línea d e paso del Sin-Fin. ür con-w
secuencia, vectorialmente se tiene V = ! + V I y, por tantowGx
v=vwX Costr
Ios valores publicados del coeficiente de fricción varían hasta un
20% debido sin duda a las diferencias en el acabado de superficie,
materiales y lubricación. Los valores en eI diagrama de la
Figura t4 son representativos e indican Ia tendencia general.
c-lc
o.ot
..oG
o.q
o-oa
O iOO &g ¡r.O ¡f¡¡ aco
V¡ ( e,.lmin)
FIGURA 14 . Valores representativos del coeficiente de fric-.ación para mecanismos de Sin-Fin.
7.2. CAPACIDADES DE POTENCIA DE UN MECANISMO DETORNILLO SIN-FIN.
Cuando se utilizan estos dispositivos intermitentemente a veloci-
dades bajas de Ia rueda, la resistencia a Ia flexión de los dien-
tes del engrane puede llegar a ser eI factor de diseño principal.111
(
A
D.-

Puesto que bs dientes del Sin-Fin son intrínsecamente más re-
sistentes que los de su rueda, por lo general no se los calcula,
aunque pueden utilizarse los métodos para calcular los esfuerzos
en los dientes de un tornillo. Los dientes de las ruedas del Sin-
Fín son gruesos y cortos en los dos bordes de la cara y delga-
dos en el plano central; esto hace difícil determinar el esfr¡ rzo
por flexión. Buckingham adapta Ia ecuación de Lewis como sigue;
[:wGt
Pn'FO . Y
Pn = PX. Cos ).
tr
wGt
Pn
Px
FG
Y
Esfuerzo por flexión, lb/pulg.2
Carga transmitida, tb.
Paso circular normal, pulg.
Paso circular axial, pulg.
Ancho de cara de la rueda, pulg.
Factor de forma de Lewis relacionado con el pasocircular
Angulo de AvanceI=Puesto que la ecuación solo es una aproximación poco precisa,
no se considera la concentración de esfuerzos. También por esta
raz6n, los factores de forma no están relacionados con el núme-LL2

ro de dientes, sino solamente con eI ángulo de presión normal.
Los valores de Y se tienen en la tabla siguiente.
Valores del factor de forma y para mecanismos de tornillo SinFin
ANGULO DE PRESION NORMAL FACTOR DE FORMA Y0 Grados'n
L4-t I 2
20
25
30
0.100
0. L25
0.150
0.175
La ecuación de la AGMA para Ia potencia nominal de entrada (en
HP) de un mecanismo de tornillo Sin-Fin es:
w , d . N v .wP- ct c W + s f (a)
126000 m 33000G
El primer término del segundo miembro es la poterrc ia de salida
y el segundo es la pérdida de potencia. La carga transmitida
permisible W t se calcula con la ecuación:G
0.8Wf,=K.d
c s G ' F-K.K (b)emv
113

La notación de las ecuaciones (a) y (b), es como sigue3
W t - Carga a transmitir, Ib.G
d = Diámetro de paso de la rueda, pulg.G
n = Velocidad del tornillo, rpm.w
m = Relación de transmisión = N / NGGW
Vs = Velocidad de deslizamiento en eI diámetro medio deltornillo, pie/ min.
Wf = Fuerza de fricción, lb.
Ks = Factor de corrección por tamaño y materiales
Fe = Ancho de cara efectivo; esta dimensión es el ancho decara de la rueda o dos tercios del diámetro de pasodel Sin-Fín; se usa el menor de estos valores
Km = Factor de corrección de Ia relación de velocidades
Kv = Factor de velocidad
tt4

oroooooeOf-<tOl.l)OtOoo)o)o)@@r-
ooooñ¡@$oc- (o (o (ovvococoCO f- t-
olf)oooo9O(OdtOf-caOñco(ocorr¡torrl
cfj
ñl+ta(ú
E{trO(oc-1t5
Cd
oodb0FI
g. iHYS{l-¡ +,ogfr C)
Éo
oEd
oóOE.d .cd
+)on(JvE¡^9'Yñ,r
cdHCdod
o)
lioaHOJ-o.:oil o)9Vñ{ñ{C:É 9óHIoFiu
f{
E €#^rA.;:
. ñJoca ol¡
9.;4I egm14 C) ).{
E-{ < i:
f{E.E.F{
rJh
I
'F{ao
F{.F{
¡'{oLr
q)
aoH
a'd
0)
H

ñto^1
0)(O \tl
oo
tO tO lf) tO t-C\: Fl CO str co
É@ót-c-(o\l v9vvv
tr1oN(úreHU ooooooo
OOOOOOOcD stt ro (o c- co o
vJvo) o c\:C- cO cO
OOO
stl \tt O CO
c\r stl (o Ódtif-F-r-H
.H
(oot-{ g\l
gooooo-1ácoo)o^t<l
Fl Ft
ostr(Y)or.l)o)(ooroo)Alstrl-oÉrororo(oco(0t-!Mooooooo
É\oNHbootootooooAdHcacD{t{trocot-
rQNd
116
M(nq)zt¡rl
.H
oo)
q)
rO.F{
alF{
0)S{
o
0)€\o.d
0)Í{f{
fr+t
oh
<lFl
"l
F{

Los valores del factor de materiales para gu.sanos de acero
templado que embonan con ruedas de bronce se indican en la Ta-
bla 3. Debe observarse eI efecto del factor de corrección por ta-
maño mientras aumenta el ancho de cara. Los valores del fac-
tor de corrección de la relación de velocidades K y el factorm
de velocidad K se encuentran en las Tablas 4 y 5 respectivamen-V
te.
Lt7

co o) o)o@r-r{ooooo
cooosflro${t6aFl Fl t-l
OOOO
(OOt-rfjlf)ÉtO@t-CO^1 ^¡
Fl Ft Flaa
OOOOO
ooooooooooooco@ooooñt ^: cD $t ro co
oooooooo@oñ¡dlFl
^1 C\¡
^1
oostr coF{ Fl
coooo)orcoto|l)<rFrco(oúicf)cfJ cf) ca c\t
^l c\¡ c\
ooooooo
6l(0r-{€@t-<t^tcDt-{l rü1 <l CfJ CYf
ooooo
oooooooooof-@o)o^l
Fl Fl
oooooooolrJotrJolf)06rJ CrJ <l <l tO ll) (O
Ft@@oro6¡oto ro ro
ooo
|lJcY)o@^lr-tO@co (o co ro
oooo
O) f- sF CO Frstt stt $ CO 6.J(o co (o co (o
ooooo
ooo935R;íFtFtooooooFr ^:t
cr¡ $ co @
EG).'-{A
118
'J
oF{
o
(d!"io
c)
ñl
o0)
V!(d
oo
C).7t
fro€C)
rorl
-t
rn
Er

8. MECANISMO: MANIVELA- BIELA -CORREDERA
uno de los mecanismos con er que más nos encontramos en Ia
vida diaria, es el de manivela-biela-corredera.
En eI caso que nos ocupa, consiste en un volante que aI accionar-
lo nos da un movimiento circular continuo. En este volante y pi-
votada está montada la biela y a ésta finalmente, está montada
un pistón (corredera) que convierte el movimiento en lineal alter-
no. El pistón va dentro de una camisa que está fijada a la es-
tructura (Ver esquema cinemático, plano 13),
8.1 CALCULO DE VELOCIDADES POR MEDIO DEL POLIGONODE VELOCIDADES
Es un método gráfico que se utiliza como un camino rápido para
resolver Ia cinemática de los problemas de mecanismos en eI4rl
Plano. -'
421Ibid, , P.84
tlnivrrsidui Áut0n0m0 de Ottidutt
Deglo $rUroteto
119

Asumimos una velocidad en el punto B (pistón o corredera) de
1 metro/seg. (Ver plano 14).
Ha1lamos las velocidades de los puntos A y B.
Trazamos el diagrama vectorial comenzando por trazar
dulo, dirección y sentido tar como está en el diagrama
co en polígonos de aceleración y velocidad.
Vs de mó-
cinemáti-
Para hallar la velocidad de A escribimos la siguiente ecuación
de la velocidad relativa:
--121V- =\/ +V-ABAB
Los números sobre los términos de la ecuación indican los datos
conocidos de cada vector. Se sabe que la dirección de VO es per-pendicular a 0, A pero se ignora su módulo.
De v" se conocen la dirección y el módulo. puesto que los pun-
tos A y B pertenecen al mismo sóIido rígido no se pueden consi-
derar aisladamente. por tanto, la única posibilidad de que A pue-
da moverse respecto de B es en una dirección perpendicular a AB
ó línea que los une.
En consecuencia Ia dirección voB h" de ser perpendicular a BA.
120

La ecuación descrita anteriormente proporciona todo lo necesario
para construir el diagrama vectorial o polígono de velocidades.
Establece que el vector V"O debe sumarse al vector Vg dando
como resultado VO.
Trazamos, por tanto, una recta perpendicular a AB que pase por
eI extremo de V" el origen de Vr4 estará en eI extremo de Vg
y Vgg tendrá la dirección de esta línea.
A continuación se traza una recta con la dirección de V4; la in-
tersección de las dos líneas ( Ve y Veg) construídas, conducen
al conocimiento de los módulos de Vg y Vee. Así se completa
el polígono de velocidades. Se hace notar que a medida que las
líneas sean más finas se podrá medir con más precisión eI valor
de las velocidades.
El polo de este polígono es 0,, donde el suíndice indica que se
trata de un polígono de velocidades. Por conveniencia para el di-
bujo se debe asumir una escala por polígono de velocidades y con
escala tz20t
VB=, 1 mt/seg. (asumido)
VA = 0.96 mts&seg.
VAB= 0.58 Mts/seg.t21

8.2 CALCULO DE VELOCIDADES ANGULARES
VA= Wz x lg2 - A S Wr= Vo W2- 0. g6 mts.0.030 mts/seg.
r 02-A
WZ = 32 Rad/seg.
vAB= w3 tAB ws = tAt wo= 9.59 mts. .- . AB r 0. 160 mts/seg.
*g = 3.6875 Rad/seg.
8.3 CALCULO DE ACELERACIONES POR POLIGONO DE ACE-LERACIONES
El polígono de aceleraciones se obtiene de la misma forma que
se obtuvo el de velocidades. (Ver plano 1b)..
"tB¡¡ - = w2 3teA í "teA = (3, 6g?b rad lr"g)2 x 0, 160 mts.
"""O = 2,l?56 Mts lr"g.2
2
"A= W;. r 0Z-A ) tO = (BZ rad/seg)2 * 0.080 mts.
"A= 30.72 mts/seg.2
a =a +a a =1bmtsl"ug.2 porpolígonoBBBAB
"t AB = 81.6 mts/seg.2 rzz

B. 4 RELACIONES CINEMATICAS431
ANALITICAS -
AB
[{=
=r BC=,
Siendo e el desplazamiento vertical entre A y C.
En un mecanismo centrado, e = 0
Ia corredera es Vp = H W
-En el movimiento de
Vx= HW
I+ e
retroceso de Ia corredera
Tl -e
EI coeficiente K ó relación entre las velocidades medias en las
carreras de retroceso y avance tiene por valor;
K =Tl+ e K- Vx y Cos Q = P * ,2 - o.b H2
En el movimiento
Ia velocidad media
rl - 0
La posición de la
Vp
corredera respecto al
l" -rz
punto A viene dada por
del
de
punto B (según Ia flecha( desde Bro a Bo,
El *ortEv NIKov, s. A.GiIi, 1975, P. 97
Mecanismos.
123
Barcelona Ed. Gustavo

el segmento¡
A
X = r Cos e + I Cosl y Sen / = r SenV+ e
Sent/ = trSen/+ X,I
ConX= e : I= rr ) T
cos /) = L - rlz\2 senzt1- 12 x sen f - rlz x2 L2
sustituyendo en la fórmula de X esta última expresión se obtiene:
r)( = r fcos 17+ _l_ - Llztrsen2 V - ),x senf - rlz ^*r]I
Velocidad de Ia corredera
v-dx V=: rW[senf * 1/2],Sen!g+IX Co"{Jdt
Aceleración de Ia corredera
a = d.2 " ., z. = - rw2 [co"cl+ ].Cos|q -].x senú-lT1 | | | t-
t
si eI mecanismo biela-manivela es centrado, se hace en las fór-
mulasanteriorese=X=0
Las fórmulas exactas para este mecanismo biela *nanivela -corre-
dera centrado que es normalmente empleado, son:
V - - rW Sen(tf+?)cos I 124

= _ r*r[ Costf +V +Cos t/
trco"2 r{ I;;ry-rL/ = Arc. Sen
wz = dVdt
€r=d2V' dt2
().senf)
w2' = w^ Cos qcos g
;€z = - trTl ( 1- tr2) sen Ll
cosS t/
L25

9. ENGRANAJES CONICOS RECTOS
Estoe engranajes se utilizan para transmitir el movimiento de
dos ejes que se cortan, aunque se fabrican corrientemente para
un ángulo de ejes igual a 90o, pueden fabricarse ó disenarse
prácticamente para casi cualquier ángulo.
SóIo se pueden considerar exactos los dientes generados. Los dien-
tes pueden hacerse de fundiciór¡ fresados o generados.
9.1 TERMINOLOGIA DE LOS ENGRANAJES CONICOS
El díametro primitivo como el paso circunferencial se calculan
de la misma manera que para Ios engranajes cilíndricos. Debe
observarse que eI juego es uniforme. Los ángulos primitivos están
definidos por los conos primitivos que se cortan en el ápice (ver
Plano 16 ).
Tag ''f, = Np T angt'= lleNg Ñp
t26

Los engranajes cónicos normalizados de dientes rectos se ta-
llan empleando un ángulo de presión de 20o, alturas de cabeza
y base desiguales y dientes de altura completa. Esto aumenta la
raz6n de contacto, evita el rebajado y aumenta la resistencia del
piñón.
9.2 DIMENSIONES DEL PIÑON Y LA RUEDA (VCT PIANO 1?)
Z = 30 (Número de dientes);Np = Ng
h - 0.250 (Profundidad del diente)
Pc = 0.375 (Paso)
D = 3, 500 (Diámetro primitivo)
R = 45" (Angulo Primitivo)
P=B
9.3 SELECCION APROXIMADA DE LAS DIMENSIONES
Torque de Diseño (T)
T = 63000 HPllp
suponemos que los engranajes tienen que transmitir 1Hp a b00
RPM con una carga uniforme. Tanto el piñón como Ia rueda es-L27

tán montados exterior a los cojinetes. EI
con un tratamiento térmico para eI piñón
rueda de 300 Bhn.
material, os un acero
de 250 Bhn y para Ia
458.74 pies/Min.
Se asume que Ios momentos de inercia son 0.347 Slugs Pulg.
para el pinón y O.347 Slugs-eulg2. para Ia rueda.
llSot'
FIGURA 15. Dimensiones
9.4 CALCULO DE LA CARGA DINAMICA
de
(
V
V
= Velocidad
= 2TIRN =
Ia línea primitiva
2 Tl ) ( 1.75) ( soo¡ =
t2
wt = Carga transmitida
t2
728

mp = mg = Masa efectiva de los engranajes
I = Momento de Inercia = 0.347
R = Radio primitivo = 1.?b pulgadas
mP= I - 0.347 = 0.113 Álug = mg.R- (1. 75)-
wt= 33000 HPV
= 33000 x (1)458. 14
= 72 Lbs.
= 0.0127 = 0.0b6b pulg.wm=
m=
Masa efectiva total
mp mg = Lt13 x 0. 118mp+ mg 0.
C -v2 (Cos
113 + 0.113
t' * cor/ )R
W=1
W = Fuerza necesaria1
R
para acelerar las masas
w = (0. OOL|) (0.0565) (458. L4)2 . Cos 4bo+ Cos ¿b"t.75 1.75
W = 11.5 lbs.1
Como los piñones están montados exterior a
un error de movimiento de 0.003 pulgadas.
te de deformación es 4g80 (c):t
W = FC + W = (0.5). (4980) + 72 = 2b62 lbs.2
los cojinetes, se toma
Seg,ir, 13l el coeficien-
441
- SHIGLEY, J. E. proyecto enp.89
Ingeniería Mecánica, Op. Cit.t29

451La carga de aceleración es:
wwW - "1 "2
= (11.5) (2562.1 = 11.44 lbs.a 11.5 + 2562
La carga dinámica es:
wd = wt + w" (2wz - wa)
Wd = ?2 lbs. + tL.44 (2 x 2562 - Lt.44l
Wd = 313.84 lbs.
9.5. CALCULO DE LA TENSION DE FLEXION
tAsumimos W- = Wd por trabajar con el método de Buckingham.
Kv -1
P =$
J = 0.255
Ks = 0.59
Km = 1.3
Ko = 1.0
= Wd Ko P Ks Km = (313.84) (1) (8) (0.59) (1.3) = 15103.81 PSI
Kv. F. J. (1) (0. 5) (0.255)
451Ibid, pp. 483-48 5-422
130

e. 6. RESTsTENCIA A LA FLExIoN t 6l )
2Sg = 19999 lbs/pulg
Sp = 1?000 lbs/pulgz
K -1(vidainfinita)L
K = f (99olo seguridad)r
Kt - 1 (Temperatura 70oC)
Como los coeficientes de corrección son la unidad (1), |a resis-
tencia a la flexión es igual aI límite de fatiga:
(f- = 17000 PSI [ = 19000 PSI"P -g
s.7. cALCr.rLO DEL COEFTCIENTE DE SEGURTDAD (tf)
n.p = Sp +n = 1?000 PSI = t.t25-l
O Y 15103.81 PSI
ng = Sg = 19000 PSI = !.257f 15103,81 PSr
Estos resultados garantizan que los dientes no fallarán por ten-
sión de flexión n mayor de 1.
131

9.8 DURACION DE LA SUPERFICIE
Los valores a emplear en este caso para hallar la duración de
la superficie son los siguientes:
cp = 28oo
Wt = Wd = 313.84 lbs.
Co.= 1
Cv=1wt=wdCs=t=Cf
Dp = 3.500 Pulg.
F = 0.5 pulg.
Cm = t.25
I = 0.066461c = 1.0
L
para este estudio utilizaremos el criterio de Ia resistencia
al contacto, basado en la dureza de Ia rueda:
S = 400 Bhn - 10000 = 400 (300) - 10000fe
S- = 110000 PSIIe
461
- Ibid, P.428 t32

wt co cs cm ct
U H = 2800 I (313.84) (I) (I) (1.25) (I) ={ffir
[n= cp
Luego la tensión
(|rr = 163183. s4
CrDf FI
de contacto por este método será:
x 1.0 = 87386.48 PSIb- s-'
133
? IH = 163188,48 PSr
Los coeficientes de corrección de la resistencia utilizados son
todos, la unidad y como la tensión es mayor que la resistencia
al contacto, este método predice un fallo de supe ficie.
Las ecuaciones de Buckingham dan cargas dinámicas que son
algo altas.
Por tanto será interesante resolverlo utilizando la carga transmi-
tida real en lugar de Wd y empleando un coeficiente Cv para
tener en cuenta el efecto dinámico.
Cv = 0.8 Carga dinámica moderada.
313.84
Ahora encontramos un coeficiente de seguridad contra er fa110
en la suPerficie igual a:
n = 110000 PSI 11 = t.26J'z-ffidTsi =========
LarazíndelacargadeBuckinghamalacargatransmitidaes:
313.84 = 4.35 Que es un Poco alta72
Peroporinvestigacionesypruebasseconsideraquelacarga
dinámicapuedevariarentreseisydiezveceselvalordela
carga transmitida para altas velocidades, cuando el par transmi-
tido es pequeño' aunque estos son casos muy especiales'
134

10. ACOPLAMIENTOS
10.1 INTRODUCCION
En esta unidad estudiaremos cómo la transmisión del movimien-
to giratorio entre dos árboles se puede efectuar por medio de
juntas.
FIGTIRA. 116 Acoplamientos
Bajo este nombre consideraremos algunos órganos en fcrma de
estuches como los que se ven en la Figura 16 que también se
llaman uniones tanto para comunicar el movimiento entre dos
135

árboles como para unir o acoplar las partes de un árbol de
transmisión, que están colocadas según un mismo eje, de ma-
nera que se puede considerar como prolongac ión una parte de
Ia otra; también sirven para comunicar eI movimiento entre
dos ejes en línea recta con dirección paralela, ó inclinada, 6
en planos diferentes. Se explica por qué taz6n razón las juntas
no siempre son fijas sino que en muchos casos son temporales
y sirven entonees para hacer solidarios los árboles que deben
comunicar el movimiento, para Io cual y con miras a un estu-
dio metodológico agrupamos los órganos de acople en dos gran-
des grupos, a saber: Acoples rígidos y flexibles'
F IGURA t7 Acoplamientos de Compresión con Pestaña de Se-guridad.
En estos sistemas estudiaremos cómo Ia transmisión del movi-
miento puede efectuarse ya con la taz6n constante de las velo'
cidades, como sucede con Ia junta de Oldham (Figura .' ).
136

Se explica en detalle las principales juntas articuladas como
son la de Oldham, la Universidad de Articulación Cardánica
para transmitir esfuerzos cuyos eies están en ángulo mayor de
135'.
Hoock la Cardánica, estableciendo nítidamente la diferencia
existente entre juntas y embragues que permiten el acoplamien-
to de árboles que no solo difieren de velocidad de rotación,
sino que hasta puede pararse. uno, continuando el otro su giro
con entera indePendencia.
10. 2 ACOPLAMIENTOS RIGIDOS
Se usan para unir ejes que están perfectamente alineados y los
cuales no tienen esfuerzos de torsión muy grandes.
Existen dos clases:
a. De manguito con chaveta, ( Figura 18)
b. De Manguito con anillo, ( rigura 19)
c. De Manguito con Tornillo (Figura 20)
Estos acoples consisten en dos medios manguitos que se colo-
can sobre Ios extremos de} árbol a unir; generalmente son de
función o de acero. Colocados sobre los extremos del árbol a
137
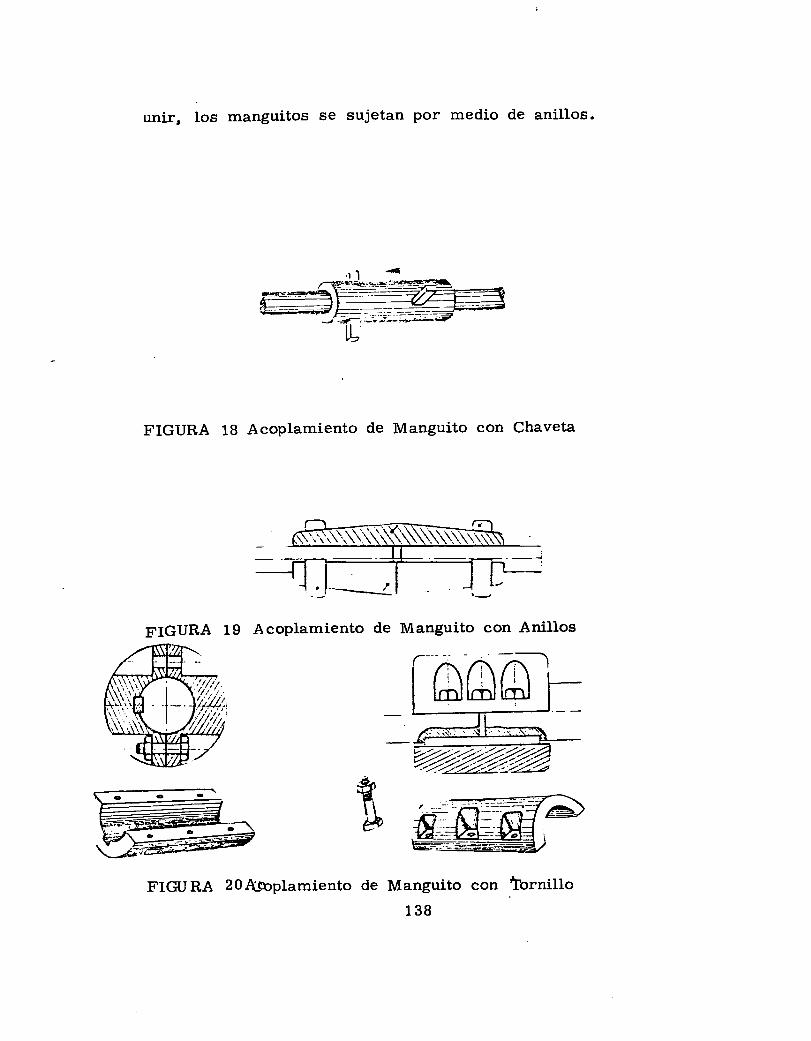
unir, Ios manguitos se sujetan por medio de anillos.
t E=-'.--:-------:'-=J'.!-,.:-.;--:*--#
LL
FIGURA 18 Acoplamiento de Manguito con Chaveta
FIGURA 19 Acoplamiento de Manguito con Anillos
Manguito138
con tbrnillo
i,t/,¡.t
l/,|"h'
FIq, RA 2 0 {oplamiento de

10.2.1 De Platos
Consiste en dos platos P chaveteados a los extremos de los ár-
boles y provistos de un cierto número de agujeros destinados a
recibir los tornillos de unión b. EI encaje de los dos platos
asegura un centrado riguroso. Unos resaltes ( ) previstos en
el moldeo impiden el giro de las tuercas. (Figura 21)
FIGURA 21' Acoplamiento de Platos
La Figura-.?:! representa un tro zo de
visto de un semi-manguito de platos
to así para su acoplamiento.
árbol de transmisión pro-
en cada extremos, dispues-
de Transmisión, con Acoplatriento
139
Trozo de Arbolde Platos
llnicaidod Áulonomo da kcidonh
Doto Eibliotero
FIGURA 22

LO.2.2 De ComPresron
Acoplamientos rígidos de compresión. Consiste en un manguito
ranurado en forma de cono doble exteriormente, y cilíndrico
interiormente, que es comprimido sobre los ejes para acoplar-
Ios por medio de dos platillos de seguridad, Ios cuales llevan
en eI centro unos conos vaciados que ajustan con los del man-
guito por medio de pernos ( Figura p3 ).
FIGURA 2g Acoplamiento Rígido de Compresión
En eI manguito existen ranuras que parten de un mismo extre-
mo, sin llegar aI otro, alternadas, y una más contada a 1o largo
de toda su longitud, lo que asegura un ajuste uniforme y seguro,
aunque eI eje sea de diámetro un tanto menor que el interior del
del manguito.
140

tO.2.3 TiPo de Mordaza
Este acoplamiento, Ilamado también de manguito partido, cons-
ta de dos mitades longitudinales sujetas entre sí por medio de
pernos con tuercas, distribuídos en igual número a cada lado
como muestra Ia Figura 24 En este acoplamiento como en to-
dosseempleancuñasparatransmitirelmovimientoderotación
de un eje a otro.
FTGURAz4 AcoPlamiento de M anguito Partido
tO.2.4 TiPo de Bridas
se ve este acoPlamiento, eI cual consiste en dosEn Ia Fig:.25
141

placas iguales
atraviesan las
unidas por medio de
alas de las bridas.
tornillos y tuercas que
FIGURA SAcoPlamiento de Bridas
En la siguiente
un acoplamiento
unir.
tabla se encuentra resumida Ia selección de
de bridas, en función del diámetro del eje a
Este tipo de acoplamiento es muy fácil de instalar, pues basta
montar cada mitad sobre los extremos de los ejes a unir, aco-
modar las cuñas en sus cuñeros y poner los tornillos de unión
apretándolos alternativamente. (Figura 26)
L42

\t{ sül !ül\- \. \-t{ CrO Cr)rttc\l ro \t{ o
6N\tl\. \. \-t{ t{ 6Att¡
Al r¡) cn tr
$@$N@\- \- \. \- \_CD rO t{ F{ t-!lttrt{<l 6aFCON
t-{
c\t€süG\¡oo\. \. \. \. \.Fl t-{ F{ F{ trttttlF{ stl Cr:, F lt) r{
t{
stloo\tloooo\. \. \_ \- \_t{l¡)6CI)t-ltttr
FI6r:^lCOlOOFl
€c\rtütN@\. \. \. \- \.r{ F{ F{ t-{ t-ttttl
t-{ (') N co str o)
fl.f, fl-fl f,,f,f;É* f;t, tt¡;üH ;üÉ *üiEel Esl EeE
Ésr Ésr És;143
adEf{mo)rd
o+,E0)
E(ú
o,oc)
É5o!É
rQ
oo0)
0)arcl
Jm
t-{

Es importante
alineados.
tener en cuenta que los ejes a unir estén bien
FIGURA 26 Acoplamiento de Brida Pernado
tO.2.5 Junta Cardánica
Esta junta simple universal es ideal para transmitir movimien-
to entre ejes que no siempre están en línea recta. El ángulo
más común que forman los dos ejes es de 135", mostrado en
la Figura
Es muy usada Ia Ju4ta Cardánica en automotriz, donse se re-
quiere unir el árbol principal de Ia caja de velocidades con el
puente trasero, donde se requiere que exista un pequeño movi-
miento en todas direcciones. Esto es necesario porque eI puen-
te trasero lo mismo que eI eje de Ia junta cardáñica, están
144

montados en los muelles traseros,
partes rígidas del chasis.
cambiando su posición a las
La Figura 27
cardánica.
muestra las partes constitutivas de una junta
FIGURA 2? Junta Cardánica
10. 3 ACOPLAMIENTOS FLEXIBLES
Son un tipo indispensable en las transmisiones modernas de
fuerza, por estar provistos de brochas o anillos de goma, sir-
ven para transmitir suavemente de uno a otro árbol la potenciat45

que uno de ellos recibe, y dadas sus condiciones aislantes
elásticas, €s el más indicado para acoplamientos directos de
turbinas y dinamos u otras máquinas eléctricas o de combus-
tión interna a bombas centrífugas, ventiladores, €tc.¡ para
cargas ligeras o pesadas y velocidades altas o bajas.
10.3. 1 Objetivos de los Acoplamientos Flexibles
Su objetivo primario es prote ger la maquinaria motora y mo-
vida contra deterioros que pueden resultar de la desalÍneación,
vibraciones de los ejes, choques repentinos, golpes de carga,
extremos flotantes o expansión del eje.
10.3.2 Condiciones que debe tener un buen Acoplamiento
Proporcionar sus superficies conductoras fácilmente recambia-
bles.
A segurar superficies bien lubricadas y como resultado un mí-
nimo desgaste.
Facilitar ttElasticidad"
146

10.3. 3 Acoplamiento Flexible de Corona de Pernos
Este tipo mostrado en Ia Figura fué hecho popular por eI
Ingeniero De Laval, de fama en las turbinas de vapor, Y €s
el más usado entre todos los acoplamientos flexibles y fácil
de instalar en las máquinas donde hay poco peligro de desali-
neamiento excesivo de los ejes, como ocurre en el caso de
que eI emento conductor y el conducido van montados en un
mismo banco.
Construcción y Funcionamiento: Los detalles característicos
de su construcción se ven en la Figura los pernos están forra-
dos con manguitos de caucho que actúan como amortiguadores
de choques entre los dos árboles.
Los dos discos con pestañas o bordes se construyen de hierro
o acero provistos de cierto número de muñones o pernos que
encajan en cavidades alternadas que hay en Ia cara opuesta.
En la Tabla siguiente se encuentra el acoplamiento adecuadÓ
para determinado eje, capacitado para transmitir hasta 2.5OO
CV a 100 R.P.M.t47

TABLA 17. Número de Caballos y Dimensiones para Acopla-mientos de Corona.
..ex;cA.4-b-
,dt-
.[ñ!iim& c{.q IIX),.¡- r-
Dr¿.E6.¿h!*
a r"&-
l'cl*ai¡. & |*¡-;;zt Ia r-.1J'^dte I
gtdoErroin-o.ta prryoae
cl¡lrl¡r¿ttt'tttt¡l¡ir l.¡ {l?s P,¡ li- | "n l r',, I e.. I ** I',5!l¡ ?.i r ñ65i 1r,¡ r,J !'" i l¡i¡ Ir .1l¡,¡ 1'n
e¡. I I'n c 'h gi¡ 2 9{¡ lr r¡ !¡,¡
7h a l'ü !5r) 8lt rl¡ ?II ?¡¡ ltia l¡h l¡¡t
3 t5 ltt tun 3 ¡Jr s 9r .l¡ 5rrlr PJ.
tOtt¡ 2 Zit tsú 3rlr ¡r¡ rcr, 3ri¡ Fr. 6rrj¡ 1t¡.
t? !8 uh r8 ?¡. q. llr¡r 9J¡ 6¡i¡ ?¡' 9,.
Itjr 5ó 9L rt95 1'h .,. 13'jr |/lt I 9,. 9!r
r5 :6 3i¡ il6 *lt 'J¡ l5 .l;¡ Fq 9i¡ T:t
l6rl¡ r02 3¡tt 19rO 5:Jr rh l6tjr'¿
1G lI!'j¡ ü-'t
l8 t!15 s;. 't:it, Ytr rr¡¡ rs #.¡ loi, l,!9r gh
n '!21 4l¡ 360 7r;r'. ¡lr t¡ Pn 7?¿t 13tr'¡ Tit
a 3r0 F¡¡ 8t(t 8tl¡ ¡r;r g 7q. 1t¡ :¡P;¡ 9i
n a,:l(, #tt 713 ¡0 rl,r n Fir rFi liari¡ s,¡
ll 65(l Gr¡: fto tl ¡¡a 30 I 90'J. f¡Fo 3t¡¡
t6 s0 ?tb 560 ll¡jr th 35 a0 s 20!¡¡ 3n
lz l&n gtt as It 1¡ It Ll 8t ZFlt lttt
3 m l{Fr¡ t¡I' q) al¡ f8 1l l? ütl¡ r%
148

10. 3. 4 Acoplamiento Flexible Renold
Este acoplamiento está compuesto de un disco de goma, como
se ve en la Figura 28 vulcanizado y reforzado por plazas de
acero.
Este acoplamiento puede tolerar una diferencia limitada de de-
salineación, ya sea axial ó angular. Está construído para absor-
ber choques y vibraciones.
10. 3. 5 Acoplamiento Flex-Hold
Este es un tipo de acoplamiento elástico que en lugar de tener
un disco de goma, como el anterior, tiene una serie de esferas
de caucho que desempeñan eI mismo oficio del disco de goma.
Es muy útit y práctico ya que absorve las vibraciones y los
cheques que se presm tan en toda transformación. (Figura 29)
La Figura 30' es un tipo semejante. al anterior, pero en lugar
de las esferas de caucho, usa cilindros de caucho. Tiene las
mismas características del acoplamiento FIex-Hol.
Univeridod lufonomo de lkridenfc
0epto B¡bl'otero
149

Flexible Renold
150
FIGURA.28 rcoplamiento

FIGIJRA 29 AcoPlamiento FIex HoId
FIGURA.30 AcoPlamiento FIex Hold con Cilindros de Caucho
10.3.6 Acoplamientos de Cruceta
Los acoplamientos flexihles Renold transmiten el momento de
torsión directamente mediante una cruceta de goma resistente151

al aceite la cual está ubicada entre las mandíbulas interpues-
tas de dos medios cuerpos.
Disenados para transmitir pequeñas potencias a altas velocida-
des, estos acoplamientos operan cqr éxito en condiciones acei-
tosas y permiten pequeños desplazamientos axiales o angulares.
La elasticidad de la cruceta protege a la fuente motriz de car-
gas impulsivas o vibraciones. No son necesarios chaveteros da-
do que se suministran con tornillos de presión. (Figura 31)
10.3. 7 Acoplamiento tipo Stoel Flex
Acopramiento tipo stoel Flex, adaptable a más del g0lo de todas
las instalaciones. (Figura 32)
Ventajas sobresalientes del Sistema:
Emparrillado elástico. Las intensidades de los golpes se miti-
gan por la deflexión de los cubos de conexión del emparrillado
elástico. se amortigua la vibración por el cambio de frecuen-
cia que acompaña al cambio de carga.
L52

-a... -{'_a.l=.1-{
i,:-r::... i
?t
,T
F IGURA.31 Acoplamiento de Cruceta
153

,íi| ..
u'
FIGURA 32 A@plamiento Stoel FIex
Facilidades de Alineación: La alineación paralela se verifica
rápidamente colocando transversalmente una regla sobre los
dos cubos y valíendose de una hoja o tira calibradora. La a1i-
neación angular se verifica con bloque de separaci.ón y calibra-
dor en eI intersticio entre las caras de los cubos.
r54

Flexibilidad de Desalineraci. ón: La porción sobresaliente de
los dientes de los cubos, sobre la cual pasa la tapa, permite
expedir la articulación entre los dos cubos, la tapa o cubierta
y el emparrillado. Esto, a su turno, habilita aI acomplamien-
to para compensar cualquier desalineación angular o paralela
del árbol.
Tapa Flotante: Las idénticas mitades de la tapa están res-
guardadas por rebordes dispuestos sobre los tornillos de cabe-
za y tuercas que las mantiene unidas. La empaquetadura entre
las mitades sirve de cierre a la grasa en el acoplamiento.
Anillos de Cierre: Los anillos de Ceoprene resistentes a la
grasa, entre la tapa y los cubos, impiden las pérdidas de ltr-
bricante y la entrada de agua, polvo, etc.
Piezas ldénticas: Los dos cubos y las mitades de Ia tapa son
idénticas. Cada cubo p ede perforarse y acuñarse para adap-
tarse a varios diámetros de árbol.
Lubricación: EI abastecimiento del lubricante en el acoplador
es suficiente para varios meses de trabajo, sin necesidad de
rellenarlo. Se mantiene lleno agregándole lubricante a interva-155

Ios regulares, por medio de conexiones normales de engrase.
FIGURA 33 Apticaciones de Stoel Flex
FIGURA 34 Apticaciones de Acoplamiento Stoel Flex
Las figuras 33 y 34 son acplicaciones del acoplamiento ante-
rior.
Bajo Cargas Livianas (Figura 35). EI emparrillado soporta la
correa sólo en los bordes exteriores de las ranuras, lo que
establece un largo trecho libre y elástico entre los bordes ex-
teriores de ambos cubos. La fuerza se transmite casi por el
Iado largo del escalón o barra del emparrillado.
156

Bajo Cargas Normales ( Figura 36 ).: El emparrillado soporta
a la correa en una superficie más grande de las ranuras y el
trecho del escalón o barra del emparrillado se acorta, trans-
mite más fuerza manteniendo de esta manera Ia capacidad pa-
ra absorber choques y amortiguar la vibración
FIGURA SSAniltos de Cierre -Cargas Livianas
FIGURA 36 Aniltos de Cierre -Cargas Normales
Desalineación Paralela
neación paralela entra
( Figura 38 ).:
en plena acción157
Cuando existe desali-
la ranura. EI movimien-

to del emparrillado en las ranuras bien lubricadas, se acomo-
da a Ia desalineación y permite al mismo tiempo, el funciona-
miento completo de la acción del emparrillado y ranura del
acoplamiento para absorber los choques y amortiguar las vibra-
ciones.
Desalineación Angular ( Figura 37 ).: Bajo Ia desalineación an-
gular, Ia construcción del acoplamiento permite una acción os-
cilante y corrediza de Ia paruilla y cubos bien lubricados, lo
cual introduce
FIGURA 37 Desalineación Angular
158

Wg.li -='-a{-+t i:-,1
FIGIIRA 38 Desalineación Paralela en Plena Acción
FIGURA 39 Desalineación Paralela- -Carga'Máxima
Bajo Cargas Máximas ( Figura 39 ).: Los escalones o barras
del emparriltado descansan en casi todas las superficies cur-
vas de las ranuras. El trecho del escalón ó barran del empa-
rrillado se acorta mucho. Bajo el impaco o choque de las car-
gas intensas, el emparrillado se dobla y continúa transmitiendo
Univcnidod üulonomo ds ftc¡doflto
0egto Sibt¡otec¡
159

Ia fuerza.
L ibre Flotación de Extremo ( Figura 4O l, A causa de que eI
emparrillado se desliza libremente entre las ranuras lubrica-
das, este acoplamiento permite flotación de extremos sin res-
tricción para los árboles de los miembros impulsadores o im-
pulsados. La flotación extremo se puede limitar a Ia cantidad
necesaria
FIGURA 40 Libre Flotación de Extremo
En los acoplamientos, como el mostrado en la Figura 4L , se
distingue su funcionamiento irreprochable tanto en trituradoras
de piedra como en molinos de'bolas, 1o mismo que en lamina-
doras y otras máquinas de fabricación de acero que usan trans-
misiones hasta de ?.000 H. P. a 100 RPM, lo cual significa ex-160

trema exigencia y obliga
cer bien el sistema para
al mecánico de mantenimiento a cono-
su perfecta conservación
FIGURA 41 gran Tamaño
10.4 ALINEACION DE ACOPLAMIENTOS
La alineación correcta de los acoplamientos es de gran impor-
tancia para obtener el correcto funcionamiento de estos.
La primera etapa en eI proceso de alineación de un acopla-
miento consiste en asegurarse si las dos mitades del acopla-
miento son concéntricas con eI eje, donde van a ser montadas
y ai sus caras son paralelas.
La segunda etapa consiste en inspeccionar cuidadosamente todas
las partes componentes del acoplamiento con el fin de eliminar
toda rebaba ó abolladura. 16l

A continuación se exponen
usan en el alineamiento de
los métodos más sencillos que
los acoplamientos.
se
L0.4.1 Con Ayuda de una plomada
Ajústese Ia mitad de un acoplamiento, si es de un acoplamien-
to dividido, de manera que su cara esté a plomo (vertical).
Para lograr esto, cuéIguese una plomáda sobre su cara; para
Iograr que la plomada quede rápidamente estable, haga sumer-
gir su extremo en aceite u otro medio bien denso. Repita la
misma operación con la otra mitad del acoplamiento. (Figura 42)
FIGURA 42 Alienación con plomada
10.4.2 Con Ayuda de una Batería.762

Manténgase un conductor eléctrico desnudo a una distrancia
conveniente de Ia cara del aoplamiento. Hágase girar esta mi-
tad del acoplamiento, si está descentrada, hará contacto con
el conductor cerrando de esta manera eI circuíto, que es acu-
sado por el timbre, Repítase eI mismo proceso con la otra
mitad del acoplamiento y procédase a asegurarlo aI eje, una
vez alineado. (Figura 43)
FIGURA 43 Alineación con l;aterÍa
10.4.3 Con Ayuda de las Láminas N y Nt
Sepárense las
puedan girar
dos mitades
Iibremente.
del acoplamiento de manera que
90o sobre el plato163
Márquense cuatro puntos a del acoplamiento

FIGURA 44Alineación con Láminas
FIGURA 45 ¡lineación con Láminas
y en uno de ellos colóquese el dispositivo mostrado en la fi-
gura; con un calibrador de láminas compruébese la luz (E) exis-
tente entre el tornillo de graduaciór y la pestaña de la otra
mitad del acoplamiento L64

comíjase el descentramiento por medio de suplementos (lámi-
nas). Esta prueba de alineamiento se puede hacer con rela-
ción al eje del segundo plato, como indica 1# Figura s (44 y 45')
10.4.4 Con Ayuda del Verüicador de la Figura
El verificador de la Figura46 es adecuado para acoplamientos
verticales y horizontales. Su extremo en V se mantiene apo-
yado firmemente contra eI saliente o eI eje sobre eI cual es-
tá montado el acoplamiento. El brazo plano (E) se apoya con-
tra la cara del acoplamiento con el cuadrante indicador sobre
la pestaña del mismo,
El indicador y su bloque se mueve contra Ia pestaña hasta
que la aguja del indicador recorra parte de una vuelta, indi-
cando de esta manera cualquier descentramiento.
Una vez corregida cualquier irregularidad, procédase a ajus-
tar el acoplamiento al eje.
Las principales causas que producen la desalineación de los
acoplamientos son:165

e
I
I
(->-)
c)
d)
e)
FIGURA 46 Alineación con Verificador
a) Rotura de los tornillos que sujetan los platos.
b) Desgaste excesivo del saliente del acopramiento y de Ia pesta-
ña del mismo.
Rotura del medio flexible.
Desgaste de la cuña y del cuñero.
Rotura de los prisioneros.
166

11. LEVAS
11.1 ELEMENTOS DE UN MECANISMO DE LEVAS. FIJNCTO-NES E IMPORTANCIA
un mecanismo de levas consiste de un mínimo de tres elemen-
tos esenciales la leva, el seguidor y el soporte. Los dos pri-
meros son elementos móviles los cuales están montados sobre
un soporte fijo. Por definiciór¡ una leva es un elemento mecá-
nico el cual es utilizado para transmitir un movimiento especi-
ficado a otro elemento llamado sqguf&r, por medio de contacto
directo. (Figura 47)
11.1.1 Elementos de un Mecanismo de Levas
Los mecanismos de levas son sencillos, fáciles de disenar y
ocupan poco espacio. Se puede obtener casi cualquier tipo de
movimiento del seguidor (en tanto que Ia leva rota ordinaria-
mente con velocidad angular constante) y se adaptan fácilmente
16?

tG6ct EC { -¡32\
,,fft*LCyó
a¡'5ctu27€
Cq)1r&c7E '.(b)
FIGURA 47 Elementos de un Mecanismo de Levas
como substitutos de operaciones manuales. Por estas razones
los mecanismos de levas son ampliamente utilizados en moto-
res de combustión interna, en las máquinas automáticas mo-
dernas como prensas de imprenta, maquinaria de calzado, ma-
quinaria textil, máquinas para tallar engranajes, etc.
!L.2 DIAGRAMAS DE DESPI.AZAMIENTO
A menudo es bastante difícil obtener una idea buena de las
características del movimiento del seguidor basándose única-
r.nente en Ia forma de Ia superficie de Ia leva. Se puede obte-
ner un gráfico más explicativo si se desarrollar algún círculo168
1

de Ia leva (por ejemplo el círculo primo) y se grafican las
posiciones radiales del seguidor en una dirección perpendicu-
lar a esta superficie desarrollada.
Esto se ha hecho en la Figura 48 y eI gráfico obtenido se
denomina diagrama de desplazamiento
l= de¡or.oltc ce i c.r.l,cul¡ prrfr,c I
;CE'i;i nso
2 L3
ccr
on
Funios
45
de :nf le ¡rdn
89tOltNurneres de fcg puntos
de Fos¡ctón
(b)
FIGURA 48. Leva de Disco- Seguidor Radial
En este caso las divisiones en Ia abscisa están identificadas
por medio de números tomados de Ia gráfica utilizada para cons-
truir eI perfil de Ia leva. Las divisiones en ra abscisa pueden
corresponder a grados o segundos ya que en la mayoría de los
casos Ia leva rota con velocidad angular constante w y entonces
el desprazamiento angula 0 se puede convertir fácirmente a tiem-
po por medio de Ia ecuación p = wt.169
Uninridod turonomo dl 0dentlDegb Sibltdeco

La longitud de la abscisa sería entonces 960o, ó si se ha he-
cho las divisiones en segundos, su longitud sería el número de
segundos.necesarios para que la leva complete una revolución .
EI diagrama de desplazamiento de la Figura 4g representa
un tipo de movimiento del seguidor llamado DRD que quiere
decir descanso, elevación, descanso. También puede interpre-
tarse como descanso, retorno, descanso; este símbolo signifi-
ca que un movimiento del segudor está precedido y seguido
por un descanso. Después de un movimiento del tipo DRD, nor-
malmente ocurre un retorno aún cuando esto no es esencial ya
que puede seguir otro tipo de movimiento (por ejemplo otra ele-
vac6n).
Existe otro tipo de movimiento llamado DRRD lo cual signifi-
ca que el seguidor realiza un descanso, elevación, retorno y
de nuevo descanso. Esta clasificación también incluye un movi-
miento compuesto de descanso, retorno, elevaciórg descanso,
es decir, con eI descanso en la parte trsuperiortt de Ia carre-
ra. La diferencia entre eI movimiento anterior y eI actual es
eI hecho de que hay al menos dos períodos de descanso en un
movimiento DRD, pero soramente uno en un movimiento DRRD.1?0

Eriste un tercer tipo de movimiento, RRR 1o cual significa ele-
vación, retorno, elevaciór¡ sin descansos. cuando se desea ob-
tener este tipo de movimiento generalmente se utiliza otra clase
de mecanismo que en Ia mayoría de los casos realiza mejor el
trabajo.
Los puntos de transición
de paso rePresentados en
can la pendiente máxima
de presión es máximo.
o inflexión corresponden a los puntos
la figura ( ¿g' ) . Estos puntos identifi-
de la curva de Ia leva donde el ángulo
11.3 MOVIMIENTOS DEL SEGUIDOR UTLLTZADOS PARA ELDISEÑO DE LEVAS.
El diagrama de desplazamiento rePresenta el movimiento del
seguidor del mecanismo de levas. Para una elevación o un re-
torno del seguidor correspondientes a un ángulo dado de la leva,
se selecciona Ia curva de desplazamiento de acuerdo "'r*" ""-racterísticas dinámicas para operación a alta rapidez. (Figuia 49)
Cuando las máquinas se mueven lentamente, a menudo no es im-
portante Ia clase de movimiento utilizado para el seguidor; pero
cuando la rapidez aumenta eS necesario tener en cuenta laS ca-
racterísticas dinámicas más importantes como son la aceleración
17t

y et jerk (tirón). La aceleración determina las fuerzas de iner-
cia de acuerdo a la relación f' = m a. Si Ia desaceleración es
grande, eI resorte unido al seguidor de la ieva debe ser 10 su-
ficientemente fuerte para mantenerlo en contacto con eIIa. En
este caso se produce un esfuerzo muy grande en el punto de
contacto 1o cual causa desgaste.
Su¡erf¡cre de lo fcvalo levo eslocrGDorto
desde lo posrcrór, O
I,2 ,3., etc.
ohlentóo monfentendo
I rotcFdo el segrrrdor
hosio los postctones
IZ
seguldor de lrostocrón deroC¡llo
ringulo Ce presrón
3
bose
,r.7rlo" "'o dei sesuttl or
:iLo""to prrmrt¡vo ode poso
prttnr lryo
I
C\: > e,rculo..v\- suFerl l c¡e
Frrtñfl¡yo
.rotcuán .i\d. lo levo i \
(o)
tle la levg
obtener la Superficie
r72
/,punlo
!-- 'Il-'I c'It¿
FIGURA 49 llx'agrama para de Ia Leva

EI JERK es Ia razírl de cambio de la aceleración con respecto
aI tiempo, J = d a . si hay un cambio súbito de aceleracióndt
esto da como resultado un valor alto para eI Jerk y un cambio
repentino de la fuerza que actúa sobre el seguidor de Ia leva-
Esto trae como consecuencia Ia aparición de choques. En una
leva disenada apropiadamente eI jerk debe ser mínimo.
Lt.A COMPARACION DE LOS MOVIMIENTOS DEL SEGIIIDOR
11.4. 1. Comparación de las características cinemáticas de
cuatro movimientos básicos los cuales tienen descansos aI prin-
cipio y aI final del movimiento. (Figuras 50 y 51)
-J-Lt
FIGURA 5q. Movimiento Unüorme.
173

AfuFIGURA 51. Movimiento Parabólico
FIGURA 52. Movimiento Armónico Simple
FIGURA 53. Movimiento Cicloidal
!r.?
t74

La Fi$ura 52 muestra que en eI movimiento armónico
el Jerk también toma valor infinito 1o que hace que este movi-
miento no sea muy utilízado a altas velocidades'
Aunque el valor relativamente alto de la aceleración en eI mo-
vimiento cicloidal puede ocasionar problemas a altas velocida-
des, eI Jerk tiene sie mpre un valor finito lo que hace que este
movimiento sea el mejor de los que se han presentado hasta
ahora. (Figura 53)
11. 5 MOVIMIENTO POLINOMICO
Especialmente a altas velocidades los movimientos básicos es-
tudiados en las secciones anteriores pueden ser deficientes.
Combinando algunos de ellos se pueden obtener diagrarr¡a s de
desplazamiento más apropiados. Al hacer esto, las curvas de
desplazamiento deben ser tangentes en las uniones y en estos
puntos las aceleraciones deben ser iguales.
Otro método para obtener diagramas de desplazamiento adecua-
dos es utilizar una ctrrva polinómica. Se puede usar este tipo
de curva para obtener casi cualquier movimiento, aunque en
algunos casos los cálculos son difíciles.175

La ecuación polinómica es:
Y - B + B 0 + B 0 + B 0 + .....t234
siendo y la elevación del seguidor y 0 el ángulo de la leva.
Las constantes dependen de las condiciones de frontera. Para
utilizar la ecuación se definen tantas condiciones de frontera
corrD se deseen y su número será igual al número de términos
utilizados en el polinomio.
Como ejemplo del uso de la ecuación seleccionemos las siguien-
tes condiciones:
Para0=Qy=Qy=Qy=Q
Para 0 y = d y = 0..: y = Q
Hay seis condiciones de frontera, por lo tanto eI polinomio se
escribe en Ia siguiente forma:
2o45y=B +B 0 + B 0 +B 0' B 0- B Q (a)t23456
La primera y segunda derivadas de (a) con respecto aI tiempo
sorr: 176

jI = *Bz+ 2wB Q + swB 02 + 4wB p3 + swe 04 ft)3456
o. 2 2 2 2 .3t- =2wB + 6wB 0 +12w-B.0+zow-B 0 (c)
34b6
Substituyendo las condiciones de frontera en las ecuaciones (a),
(b) y (c), se obtiene eI siguiente sistema de ecuaciones lineales
simultáneas:
0=8,I
0=wB2
o = 2w2B3
d = s *FB *hzt *p7t *p4B_ + put^Lz'3'4/5/6
4o = wB +2wttB +Bw pzt +4wp7e +5wp B
z/3'4'5'6
o = z*28 + a*2 ¡a s + tzw2B p' , + zowzn^ p3g / 4 5 6/
Resolviendo estas ecuaciones, se obtienen los siguientes resulta-
dos:
B =0, B =0, B =0, B =!Q..1{-, B = -t 2 3 4 rls 5
/
86= 6 d
15 d,7
pu t77

La ecuación de desplazamiento se determina sustituyendo estas
constantes en la ecuación (a)
,, = 1o d 03 - 15d 04 + o d 05¡¿ 3 /A4 65/- /-r /"
Esta ecuación recibe el nombre de polinomio 3-4-5, debido a los
términos que contiene.
La velocidad , aceleración y jerk son:
y =& 02 - 6o dw 03 + 3odln¡ 04
7t- /t 4 ,ftu
l=6odw2 A lsody2 gz +:r¿oay-?03
T -/¿4 Fu'J' = 6odw3 - B6odwl 0 + 86o dw3 027VV/
El valor máximo de la velocidad se obtiene cuando I =pl Z;
Ia ecuación se puede escribir en la siguiente fcma:
--1+=Bodwo2 l-1-z(o )*/-g-)'zt
--
P3 L \ P / \ P / )
y max = 1.875 dw
13
ymax= I f 1-1+ rl41"ry1 )1?8

El valor máximo de Ia acetreración (en valor absoluto) se obtiene
cuando0=0.2886cuando0=0.?88.-i-//J ,,p
En este caso la ecuación queda:
, r 21y= 6o dwz g I t- s / 0 ) * z | 0 \' tT L \V/ \rtt )
Tomando A = Q.288 se tiene :
nzl-ty*"s= 60 dwo (0.288) lr-g (o.zBB+z (0.083)l
7Lr'y' max = 5. 18 d*2
¡22
Si se hubiera tomado 0 = 0.788 eI resultado hubiera sido:T.. ,y max = - 5. 18 dw'a/-En el caso del jerk es necesario hallar su valor cuando
y Q = Pl2. Tomando la ecuación se obtiene:
i,' = 6odw3 | 1 - 6 / 0 )+ 6 lA ) 'lT L \/r/ \T/ r
Cuando0 =Qy 0 =,p
... 3v =-91-E3rA'fJ/
Uni¡tsidod Autonomo ds 0rcidt,hOepto Eiblior¿co
179

3 f ' . \ , -'l
i" = 6o.dw" I r -6 ,rtz) + 6 (rl+)l .'.T L \ t \ ')
/
Cuarrdo 0 = /btz
'j,'=-Llz l60d*3\\T/ó sea el valor máximo del jerk ocurre cuando 0 = Q y
g =FPara comparar este rro vimiento con los estudiados anteriormente
se tomarán d, /) , w iguales a 1. En este caso se obtienen los
siguientes resultados.
ymax = 1.875
ymax=5. 18
'¡l'max = 60.0
Se puede observar entonces que si se utiliza una ecuación potinó-
mica para el desplazamiento del seguidor los valces máximos
de las cantidades cinemáticas son aceptables.
Ejemplo:
El seguidor de una leva, Ia cual grr a a 1800 RPM, se desplaza
una dbtancia d = 5tt mientras la leva rota g0? Se desea que la
ecuación para el desplazamiento del seguidor sea un polinomio que
satisfaga las siguientes condiciones de frontera:180

Para 0 =Q y=Q Y = Q j¡' = Q
,atPara Q =/t y = d y = Q y = Q
Estudiar las características cinemáticas del movimiento. De
acuerdo con las ecuaciones los valores máximos de la velocidad,
aceleración y jerk son:
y*^-. = (1.8?5) (5) (4.8) in/seg = 28.75 pulg/seg.(1.5?o?)
l'*"* = (5. 18) (5)o(4.8)2 pulg/seg? = Z4g pulg/seg.(!.5707)'
' y' = (60) (5) (4.8)3 pulg/seg3 = 8550 pulg/seg3-max @
Para un análisis completo es conveniente obtener gráficos de las
diferentes cantidades cinemáticas. En eI centro de cálculo elec-
trónico de la Universidad del Valle se encuentran disponibles una
serie de programas para computador (almacenados en el disco
correspondiente a llrgeniería Mecánica) por medio de los cuales
se puedén obtener los gráficos mencionados anteriormente.
AI finat de esta sección se muestra un listado de ellos con los
resultados obtenidos para este caso particular. El paquete de
programas consiste de un programa principal (almacenado) llama-181

do P0LIN el cual lee los valores de las diferentes variables utili-
zadas en Ia graficación y llama varias subrutinas cuyos nombre s
y funciones son las siguientes:
SUBRUTINA
COEFC
LIEQS
GDDSL
GDVSL
GDASL
GDJSL
SIGNIFICADO DE LAS VARIABLES:
NORDE
BETA
FUNCION
Evalúa, basándose en las condiciones
de frontera, las ecuaciones cinemáti-
cas (desplazamiento, velocidad, etc. )
para hallar el valor numérico de los
coeficientes de los B (I) que en este
caso constituyen las incognitas cuyo
valor se desea determinar.
Determina el valor de les B (I)
Construye eI diagrarna de desplaza-
miento.
Construye el diagra ma de velocidad.
Construye eI diagrarra de aceleración.
Construye el diagrerra de jerk.
Número de términos del polinomio
Angulo de la leva (en radianes)
t82

DIST
DELTA
OMEGA
TERM
ANG
Desplazamiento del seguidor
Incremento del angulo p (en grados)
utilizado cuando se evalúan las ecua-
ciones para obtener las diferentes
gráficas.
Velocidad angular de la leva.
Vector utilizado para escoger las
ecuaciones cinemáticas que se van
a utilizar. Por ejemplo si TERM(I)
es igual a 1, se utiliza la ecuación
de desplazamiento, si es igual a 2,
Ia de veleidad, si es igual a 3, Ia
de aceleración y finalmente si es
igual a 4, Ia de jerk.
Vector utilizado para indicar los va-
lores de p utilizados para evaLuar
las ecuaciones en el orden escogido
por medio de TERM.
Inicialmente es un vector utilizado
para suministrar los r¡aloes de los
términos independientes de las ecua-
cior¡es anteriores. AI final por medio
183
B

1a.
2a.
3a.
de LIEQS represente el vector que
contiene los valores de los coeficien-
tes de1 polinomio,
TARJETAS NECESARIAS:
Tarjeta llxEG PoLIN
Tarjeta VALOR DE NpRDE (FgnUeTO 12)
Tarjeta y siguientes: c oN FoRMATO 8F10.0 SE LEEN LOS
VALORES DE BETA, DIST, DELTA, OUNGA, TERM (I)'
ANG (I) B (I).
RESTRICCIONES:
1. El valor máximo del número de términos del polinomio es 10.
En caSo de que fuera mayor solamente es necesario cambiar eI
DIMENSTON de p0LrN
Z. Las gráficas de las diferentes cantidades cinemáticas se cons-
truyen tomando una longitud de 8tt para el eje 0 y de 6fr para el
eje correspondiente a ta cantidad cinemática graficada-
3. Las divisiones en el eje 0 se hacen cada I0o
4. Actualmente, debido a las limitaciones existentes, se obtiene
en primer lugar el diagrama de desplazamiento por medio del184

PLOTTER y luego el programa para con eI objeto de colocar una
nueva hoja de papel para obtener el diagrama de velocidad. La
operación se repite con el objeto de obtener los diagramas de ace-
leración y jerk.
DATOS CORRESPONDIENTES AL EJEMPLO:
NORDE = $
BETA = t.5?0?963 radianes
DIST = 5rt
DELTA = 1o
puncg = 4.8 rad/seg.
TERM (f) = t.
TERM (2) = 2.
TERM (3} = 3.
TERM (4) = 1.
TERM (5) = 2.
TERM (6) = 3.
ANG (1) = 0.
ANG (2) = 0.
ANG (3) = Q.
ANG (4) = t.5?0?963
ANG (5) = 1.5?07963
(ecuación de desplazamiento)
(ecuación de velocidad)
(ecuación de aceleración)
(ecuación de desplazamiento)
(ecuación de velocidad)
(ecuación de aceleración)
185

ANG (6) = 1.5?0?963
B(1) = 0.
B(2) = Q.
B(3) = Q.
B(4) = 5.
B(5) = Q.
8(6) = 0.
A continuación se muestran los listados de los programas y los
resultados obtenidos en eI computador.
Not":
1. Con respecto a estos listados se ha hecho el siguiente cambio
en las subrutinas GDVSL, GDASL, GDJSL: después de la instruc-
ción FI = 0 se ha colocado:
CALL SCALE (1., o., 0. )
Esto con eI objeto de definir inicialmente las escalas para grafica-
ción.
2. Si ta gráfica se hace en una hoja de papel tamaño oficio, al em-
pezar la pluma de PLOTTER debe estar en Ia siguiente posición;
186

11.6 OBTENCION GRAFICA DE LA SUPERF'ICIE DE TRABAJODE LA LEVA.
Se ha visto anteriormente que algunas de las curvas utilizadas para
el movimiento del seguidor pueden obtenerse gráficamerrte. Sin
embargo, cuando se requiere un alto grado de precisión deben
calcularse las ordenadas de la curva analíticamente.
En general, en el trazado de una leva se conocen la posición
inicial, carrera, dirección y el movimiento utilizado para el se-
guidor, lo mismo que Ia velocidad angular de la leva, sus ángulos
de giro correspondientes a la elevación, descanso, retorno, etc.
y la situación de su eje con relación al seguidor. El problema por
18?

lo tanto es determinar el perfil de la leva que comunicará al segui-
dor el movimiento deseado. El método general para la solución
gráfica es el siguiente.
1. Dibuje eI círculo base. En la práctica se decide sobre su tamaño
de acuerdo con los requisitos del diseño de la máquina (espacio
obtenible, etc. )
En los problemas a menudo se establece su diámetro o este se
puede escoger de acuerdo al val.or máximo permisible del ríngulo
de presión.
2. Dibuje Ia trayectoria de1 punto de trazo del seguidor en su posi-
ción apropiada con respecto al eje de la leva, ya sea una línea recta
para seguidores de translación recíproca o un arco de círculo para
seguidores oscilantes.
3. Debido a que se conoce la carrera D del seguidor correspondierr
te a un ángulo total de la leva B, dividida este ángulo en un número
apropiado de partes igl ales para representar unidades iguales de
tiempo y dividida la trayectoria del punto de trazo del seguidor en
el mismo número de partes, estando determinada la magnitud de
cada una de ellas por eI movimiento escogido para el seguidor.
4. Encuentre puntos de la curva teórica (curva primitiva). Esto se188

puede hacer por medio del principio de inversión cinemática y se
ilustra en Ia Figura
5. Dibuje la superficie de contacto del seguidor correspondiente a
cada una de las posiciones del punto de trazo en la curva teórica
(para un seguidor de rodillo, ésta superficie es un cilindro repre-
sentado en el dibujo por un círculo cuyo centro es el punto de trazo)
6. Dibuje una curva cqrtinua tangente a todas las posiciones de la
superficie de contacto del seguidor. Esta curva esla superficie
de trabajo de la leva.
EJEMPLO: LEVA DE DISCO, SECUIDOR RADIAL DE RODILLO,
M OVIMIEN TO IJNIF ORM EMEN TE A C E LERA DO-RE TA RDAD O.
Un seguidor radial de translación recíproca tiene una elevación de
1.8rt con UARM mientras la leva rota 150oCC, descar¡sa durante
los 30o de rotación siguientes y retorna con UARM durante los
restantes 180?
La rapidez de Ia leva es 420 RPM: a) encuentra gráficamente Ia
superficie de trabajo de Ia leva; b) calcule la aceleración y Ia ve-
locidad máxima del seguidor durante su elevaciór. Cómo varía el
jerk? 1g9
Uninnidod lutonomo dl 0rridcntr
0e0|t Eibllolro

a) Solución: Se escoge un tamaño para el círculo base, por ejemplo
R=2rt ya que no se incluye este dato en eI enunciado del problema.
Se traza el círculo base y se determina la trayectoria descrita por
el punto de trazo (línea A07). Para determinar el punto 0 tome
como radio del rodillo Ilztt, Debido a que el movimiento es UARM
se divide el ángulo (0A6) correspondiente a Ia elevación del segui-
dor en un número PAR de partes iguales (seis en este caso) para
representar intervalos iguales de tiempo. Se divide la carrera del
seguidor en 6 partes en la forma descrita en V (b) para el caso del
movimiento UARM.
Para obtener los puntos 1, 2, 3, .... sobrela curva primitiva
(curva teórica) imaginamos que el seguidor se mueve alrededor
de la leva y se desplaza aL mismo tiempo hacia afuera. Si la leva
rota en sentido contrario de las agujas del relo (CC) eI movimiento
equivalente del seguidor estando Ia leva estacionaria es en sentido
de las agujas del reloj (CL).
Es buena idea para evitar errores numerar los puntos de la trayec-
toria del seguidor como lt, 2', 3t, . . . etc. y los puntos corres-
pondientes a las posiciones del punto de trazo sobre la curva teórica
como 1, 2, 3, . . . etc.
190

Cuando el seguidor rota el ángulo 0A1 debe haberse desplazado una
distancia 01r, por lo tanto con centro en A y radio Alr construya
un arco de círculo para obtener el punto 1 sobre la línea A1. Simi-
larmente con centro en A y radio A2t cmstruya un arco de círcr¡lo
para obtener el punto 2 sobre la línea 42. Se repite eI procedimien
to anterior para obtener los puntos 3, 4, 5 y 6.
Debido a que de 6 a 7 hay un descanso, esta parte de la curva es
un arco de círculo con centro en A y radio A6. El retorno se rea-
Iiza también con UARM por lo tanto podemos utilizar las mismas
divisiones sobre 06t utilizadas para la eler¡ación teniendo en
cuenta que es necesario dividir eI ángulo de retorno (f801 en 6 par-
tes iguales.
Obtenga los puntOs 8, 9, ... !2. La curva primitiva es una curva
suave que une loS puntos encontrados anteriormente. COn centro
en estos puntos y radio 1/'r (radio del rodillo) dibuje arcos de
círculo que representan las diferentes posiciones del rodillo. La
superficie de trabajo se obtiene trazando una curva suave tangente
a todas estas posiciones. Si se utiliza otro diámetro para el rodi-
llo se tendrá una stperficie de trabajo düerente.
b) Tomando la ecuación191

4d w27Siendo n = 420 RPM =
Además p = 1 500
360.
't' = (41 (1.8) (L4 rI )2(2.6312
? RPS. Se obtiene w = 14 TI rad/seg.
2I = 2.63 rad.
PuIg
Seg 2
V = 2o3o Pulg/segz
a
v
La velocidad máxima ocurre cuando A = p lZ; en este punto
2dwmax
= (21
max z
= 60.4 pulg/seg.
Pulgseg
max
Durante este movimiento que es del tipo DRDR teóricamente ra
acereración cambia instantáneamente al principio en la mitad y al
final de la carrera; por Io ta¡rto el jerk es ir¡finito en estos puntos.
v
v
t92

/t/t/l¡i
i!
i
\
CURVAT¿AR'CA
FIGURA 54. LEVA DE DISCO. SEGUIDOR RADIAL U.AR. M.
193

TL.7 ANGULO DE PRESION
11.7. 1. Definición
Como se puede observar en Ia figura 54 el punto de contacto entre
el rodillo y Ia leva no está siempre sobre la línea central del segui-
dor a aún cerca de ella (vea el punto k en la posición 3).
En ausencia de fricción (y deflexlón) la cual es relativamente peque-
ña, }a fuerza en el punto de contacto es normal a las superficies;
epor 10 tanto ko es la línea de acción de Ia fuerza N ejercida por
la leva sobre eI seguidor. EI ángulo que K3N hace con Ia lúrea cen-
trat g3 del seguidor es llamado el ángulo de presión 0 en el punto
3. Entonces, podemos definir el ángulo de presión para seguidores
de rodillo y levas de disco como el ángulo entre la línea de recorri-
do del seguidor y la normal a las superficies en contacto.
lL.7.2. Análisis de fuerzas y máximo ángulo de presión permisi-
ble.
Conref erencia a la Figura 55 son:
N = Fuerza normal (1b) entre Ia leva y el seguidor de rodillo
F = Fuerza externa 18) ejercida sobre eI seguidor
Rr.Ro = Fuerzas de reacción (lb) ejercidas por el sopcrte sobre- 4 eI seguidor
194

I = Coeficiente de fricción entre el seguidor y el sqorte
b = Distancia entre los puntos de contacto del seguidor y el so-ponte (in)
d = Diárre tro del seguidor (in)
a = Distancia en voladizo del seguidor (in)
Se descompone Ia fuerza normal N en 2 componentes: la componen-
te horizontal N Senp y Ia componente vertical NCoso . Consideran-
do el seguidor como un cuerpo libre se tiene3
Zt"-o;Rt -Rz -N senP = Q
Zfy= o;Ncos0 = T-/,(R, + *r) = Q
IuRt = o; + F * lRz d + a N seno - +
Ncos0 - RrO = Q
Eliminando R, y RZ en las tres ecuaciones anteriores obtene-
mos:
N=F bcos0-' Q,/" */b-,/' d)Seno
Entonces:
N=psi:F 195

ll*a/
FIGURA 55.
aVcos/
- /
It\
\
Fuerzas
N/t
\/
y Máximo Angulo de Presión
bcos 0
Debido a
bir:
bcos 0
tang
(2¡t a *,p
que ,/'o podemcis escri-
b -uZal senp- o
es una cantidad muy pequeña
(zf a *,/
0- bp¿ffiul
b) Sen0 =Q
196

Para este valor de A la fuerza normal N es teóricamente infinita;
en otras palabras el seguidor se aplastará contra eI soporte. Enton-
ces el ángulo de presión debe ser menor que T"rrg-1
f b 1 ó, el ángulo de presión'TrL l(2a+b) J
máximo permisible es 0max
=Tang 1 f b IL -jz"+bl- J
En la práctica el valor máximo permitido para 0 al diseñar la
leva depende de la experiencia ya que es afectado marcadame nte
por diferentes detalles del diseño oomo son eI tamaño del círculo
base, el mor¡imiento utilizado para el seguidor, etc. En general un
valor utilizado para empezar a diseñar Ia leva es 30", aunque debe
tratarse de disminuir el valor del ángulo de presión máximo real
tanto como sea posible.
11.7.3. Métodos para reducir eI ángulo de presión.
EI ángulo de presión de una leva cuando se especifica el desplaza-
miento del seguidor puede reducirse en las siguientes formas:
197

a) Aumentando el diámetro del círculo bases Supóngase que un se-
mientras la levaguidor de rodillo se desplaza una distancia d
rota un ángulo. (Figura 56 )
Para el círculo base menor el ángulo de presión es 0r. Comparan-
do este valor con el correspondiente al círculo base mayor se
puede ver facilmente que fi > 0
--..f t -l- t- ,-. - ----fPg'rtt 0e 0 ¡gYQ --:-___
-/
FIGI]RA 56. Circulo- Base Aumentado
1
o4,r
r-- A;TF,x;
198

De acuerdo a lo anterior aumentando eI tamaño de la leva Se reduce
eI ángulo de presión, pero una leva más grande produce desbalan-
ceos en el eje de Levas especialmente para valores grandes de Ia
rapidez, necesita más espacio y hace que las dimensiones de otros
elementos disenados sean mayores. Por 1o tanto es necesario tra-
tar de buscar un punto intermedio entre Ia necesidad de disenar
una leva que ocupe poco espacio y aI mismo tiempo obtener un
ángulo de Presión Pequeño.
b) Cambiando eI valor de Ia excentricidad del seguidor. Para mos-
trar en qué forma puede afectar un cambio de Ia excentricidad eI
valor del ángulo de presiór¡ se tratará de expresar este úItinrlo
A=\" curYÚfebrico
A
cirtulc- /Á,- i--\ lipnmo --fr, ,.q.,. f/\ i "l,, e \ I Vz,/ |
-"ii- ry\\, r. r ,,\\"
r/'\{z'57. Seguidor Excéntrico de Rodillo
/1+|-I
Uninridod lutonomo de Occidrntr
Degto liblioteto
FIGURA
199

en términos de una ecuación matemática. En algunos casos depen-
diendo del movimiento utilizado para el seguidor la ecuación puede
ser difíciI de resolver excepto por métodos gráficos o por medio
del computador. Con referencia a la Figura 5? una leva csrduce
un seguidor excéntrico de rodillo.
De acuerdo a Ia figura anterior se tiene:
Entonces:
y= ("*y) *" rlw t- e+LL
tang S (J,/wr,) _ e
a+y
aunque tanto y como *" aparecen en la
ecuación anterior el ángulo de presión no depende de Ia velocidad,
por ejemplo si se utiliza el movimiento cicloidal se tendría:
dWL (1 -cos 2YI 0 / wL) - etan[ = /e ,."
a* d ( -lsen
-2 II
200
9_P
2II O )lt/

(1-cosTan 0
-1SenE-
o sea er ángulo de presión es soramente función de la geometría
y del ángulo que haya girado la leva.
Para los seguidores radiales e = 0 y entonces ra ecu ación queda:
TangP - i,/ w l-,
ra+y
La ecuación muestra que el efecto neto de la excentricidad es re-
ducir el valor del ángulo de presión. Es por esta razínque no se
onsidera este ángulo como un factor importante en el diseño de
los mecanismos de levas que utilicen seguidores excéntricos. En
algunos casos esto es válido Fra seguidores de cara plana y se-
guidores oscilantes.
tt.7.4. Cálculo del ángulo de presión.
En un diagrama de desplazamiento y para un seguidor de transra-
ción recíproca, la pendiente máxima ocurre en el punto de infle-
xión, el cual es también el punto correspondiente a la rapi dez má-201
2\r 0dvd(07
nv

xima. A pesar de que hay métodos matemáticos Para calcular la
magnitud y localización de1 ángulo de presión máximo para cual-
quier leva que tenga un seguidor de rodillo, restringiremos nues-
tro estudio aI caso de levas de disco con seguidor radial de rodi-
IIo. Como se ha visto anteriormente, la pendiente del diagrama
de desplazamiento representa en alguna escala la rapidez y con
ciertas con&i ones, también representa el ángulo de presión.
La diferencia entre la rapidez y la pendiente es debido a que la
pendiente es adimensional.
Por 1o tanto, la pendiente en cualquier punto de un diagrama de
desplazamiento se puede obtener multiplicando la rapidez del se-
guidor V. por una escala de tiempo K.r ; o sea-rt
Tang P = -g-dx
= (V- PuIg ) (
seg
Klt seg )
pulg
El valor de K. t que debe utilizarse corresponde a la longitud delt
ttcírculo de referencia tt. Para aclarar eSte concepto conSidere
eI punto (Figura 58 ).
La lúrea 3K es normal al perfil de Ia leva en K y a Ia curva primi-
tiva en 3, eI ángulo de presión es aBK. La línea mn es tangente a202

t\\\
\'\i\t'. l)
\i\(o\
I='1¡
I8'lr'l-oi- -.-
Circttl¡ cft .*frnnn,^ pp,nc! yvnlo J
--/tl ¡vnl.:2
circtlc f,r'-o'\
(e) \| 't"ol.'ao.. = 2r.r:. (¡*,|:.:) ------1,-- - -*_-:
FIGURA 58. Diagrama de Desplazamiento .
Ia curva primitiva y 3 p es tangente al círculo de radio A3. Enton-
ces el ángulo n3p es igual a 0 3. Esto permite decir que si se toma
Ia longitud de Ia circur¡ferencia de radio rB ( en este caso es el
círculo primitivo ya que pasa por el punto de paso) para eI eje de
las abscisas del diagrama de desplazamiento, Ia pendiente de Ia
curva de desplazamiento en el punto 3 será el ángulo de presión
or
\9r
rxI
;'f;9'
203

verdadero en esa posición. Similarmente se obtendría el ángulo de
presión verdadero para Ia posición 2 en un diagrama de desplaza-
miento cuya longitud fuera igual a Ia de la circunferencia de radio
"2 porqoe la tangente 2u al círcr¡lo A2 y la tangente a Ia curva 2w
definen eI ángulo de presión 0, en 2.
Sea ns
entonces
K.lt
(RPS) la rapidez angular de la leva:
2 llr rns tiene unidades de pulg/seg y por 1o tanto
=t -ZT rns-
para un diagrama de longitud 2 Il r (pulg)
Considere cualquier punto X situado en la curva teónica (curva
pri mitiva) a un radio r = rp y donde rp es el radió del círculo
primo (igual al radio del círculo base más el radio del rodillo)
y el valor de y es el desplazamiento del seguidor desde su posición
inicial 0. La longitud de la circunferencia correspondiente es
2Ytr - 2 11(rp + 1Y). Si la leva tiene rapidez angular
ns entonces Kr =tx Vx = vf =vf2 TI(rp+y) (rp+ylw Ve
donde 0 es el ángulo de presión para cualquierx
y del seguidor; V es la rapidez del punto de lac zo4
desplazamiento
leva sih¡ado a

rp +y.
La ecuación no depende del movimiento del seguidor, cuando el se-
guidor es radial de rodillo. La ecuación se puede usar para calcu-
lar el ángulo de presión en un punto, ó para calcular el radio rb
del círculo base si se conoce el ángulo de presión.
11.8 TAMAÑO DE LA LEVA
Generalmente es deseable una leva pequeña porque es más compac-
ta, tiene menos vibración a alta rapidez, sufre menoÉ¡ desgaste y
además si se va a producir una gran cantidad de ellas uIr¿I reduc-
ción pequeña en el tamaño puede representar una notable disminu-
ción en los costos. Hay tres factores que determinan el tamaño de
la leva, eI ángulo de presión, el radio de curvatura del perfil de
la leva y el tamaño de Ia manzana. Anteriormente se ha relaciona-
do eI tamaño del círculo base (eI cual determina el tamaño de la
leva) con eI ángulo de presió$ estudiaremos ahora los otros 2 fac-
tores.
11.8.1. Radio de curvatura del perfil de la leva.
En Ia figura 59A y 598 se muestran dos levas para las cuales se
ha especificado la misma carrera d, el mismo seguidor de rodillo205

y el mismo ángulo total de la leva. El perfil de la leva de la figura
( sg ) ( A ) es suave y tiene un radio de curvatura apropiado mien-
tras que }a leva de Ia figural/5g3) tiene una forma aguda en la parte
máS alta. La carrera real es dt, ]a cual es menor que la carrera
especificada d. Por lo tanto, el seguidor no tiene el movimiento
deseado. Este fenómeno que puede ocurrir cuando la leva es muy
pequeña se llama Undercutting. Para evitarlo se puede adoptar una
ó ambas de las soluciones siguientes:
1. Aumentar eI diámetro del círculo base. Esto trae comodesven-
taja el aumento del tamaño de la leva.
2. Reducir eI tamaño del rodillo del seguidor. En estos casos es
necesario que el radio del rodillo no sea mayor que eI radio de
curvatura mínimo de la curva teórica, sin embargo hay un }ímite
para el tamaño míaimo de1 rodillo ya que debe ser 1o suficiente-
mente grande para alojar un eje y cojinetes y además los esfuer-
zos de contacto aumentan cuando el tamaño del rodillo disminuye.
Si la 1eva tiene una 1¡ra¡'za¡,a, Figura (60 ) debe ser lo suficiente-
mente grande para acomodarla y a su vez Ia manzana debe ser lo
suficientemente grande con respecto al eje para hacer que la
concentración de esfuerzos en Ia chaveta esté dentro de límites206

C;..u/, E,-.
0u¡vu d,Trabajc
/
¡
A
F IGURA 59. g¡ Dercutting en
/I
t
BLevas Pequeñas
1-1.8.2. Tamaño de Ia manzana.
Hasgré
Manzana
207
FIGIJRA 60. Leva con

permitidos. Si la leva no tiene rnanza,na,, la leva misma tendrá que
ser mayor que el eje.
11.9. CLASES ESPECIALES DE LEVAS
11.9.1. Levas inversas
En una leva de este tipo las funciones de los elementos se invier-
ten, el cuerpo que describe una trayectoria especificada es el ele-
mento conducido y el ¡¡odillo es el conductor. En la figura (61 ),
se muestra el yugo escocés eI cual es un e jemplo típico de esta
clase de leva. Este es un mecanismo que produce movimiento ar-
mónico del elemento D cuando la biela C rota con IEr pidez constan-
te. La rapidez del punto P es siempre V Cos.q
En las levas inversas eI brazo conductor que lleva el rodillo puede
oscilar o girar 3603 La forma de Ia ranura depende del movimien-
to deseado y puede ser como la mostrada en Ia Figura (62 l.
Estos mecanismos se utilizan cuando las cargas son pequeñas como
sucede en las máquinas de coser. El procedimiento más utilizado
para dibujar las levas inversas es supqrer una serie de posiciones
del elemento conductor separadas intervalos iguales de tiempo y
208

FIGURA 61 . Yugo Escocés.
FIGURA 62 . Leva inversa.
Uninnidod lulonomo óg 0ttidcnl¡
l}cPh libhleto
Rqann l_---#- b&th
209

determinar las posiciones correspondientes del elemento conducido
de acuerdo al movimiento deseado; hiego prcyectar los puntos de
tal forma que definan la línea central de la ranura.
11.9.2. Cruz de Malta
La craz de Malta o mecanismo de Ginebra llamado así porque fue
utilizado inicialrnente en Ginebra para prevenir el daño de los re-
lojes al darles cuerda, podría incluirse dentro de la categoría de
levas inversas, aunque existe una diferencia con respecto a
ellas; mientras que eI elemento conducido en las levas inversas
oscila ó tiene un movimiento de translación recíproca, en la crvz
de malta rota en forma intermitente (tiene períodos de descanso)
y siempre 1o hace en el mismo sentido. Actualmente este meca-
nismo es utilizado ampliamente en aplicaciones de alta y baja ra-
pidez, por ejemplo en dispositivos de transpcte y alimentación
de materia prima, en contadores de revoluciones y en otros ele-
mentos que tengan movimiento intermitente.
La forma en la cual trabaja este mecanismo es la siguiente3 con
referencia a la Figura ( 63 ), eI elemento C, el cual pdría ser
ur¡a rueda dentada conducida por otra rueda P, rota ccn rapidez
2rÜ

constante y contiene el rodillo A. Si C rota en sentido de las agu-
jas del reloj, el rodillo A entra en una ranuraradial (estas ranu-
ras no son necesariamente radiales) hecho en Ia rueda G hacien-
do que G rote mientras A se mueve hasta Ia posición D Ia cual
es el punto de salida. Mientras tanto Ia ranura K se moverá a
Ia posición inieial A.
FIGURA 63. Cruz de Malta
Cuando eI pasador se mueve de la posición A Ia posición A
(por el camino DEA ) la rueda conducida permanece quieta. Vol-
viendo nuevamente a Ia posición A, eI rodillo entra en la si-
eú
t.,\
\FN¿,..\ |+'
2rt

guiente ranura y hace que la rueda conducida gire un ángulo p.
La placa H, la cual se muestra sombreada, se une al conductor
c er cual podría ser una biera en cuyo extremo está el rodilro
A. La forma entre las ranuras de Ia rueda conducida tiene
prácticamente eI mismo radio que. H. cuando el pasador sale
en D, H hace contacto cqr una parte circt¡lar de G y la mantie-
ne quieta hasta que d. pasador entre en la ranura siguiente. se
corta eI arco MdN de la placa H para que haya cierta torera-
ción con respecto al radio r de Ia rueda G.
La distancia Ad debe ser un poco mayor que ab, y el ángulo
MBA = 6 =aBD(tambiénABa = I =ABN= AKo )
para que la placa bloquee la rueda G.
se pueden utilizar varias ranuras (B o más), estando el número
máximo limi.tado por el tamaño der rodi[o y las dimensiones
del mecanismo real.
En la figura ( 68 ), eI rodillo A hace una revolución por cada
1/5 de vuelta de G. eI elemento conducido acelera y desacelera
durante su movimiento. si la rapidez es grande, s€ puede redu-
cir la aceleración máxima usando ranuras que no sean radiales
pero esto es más costoso. La aceleración máxima ocurre cerca212

de las posiciones correspondientes a 113 y 21 3 del movimiento
de G.
En la cruz de malta, mostrada, el rodillo A se mueve radial-
mente en el momento inicial, de tal forma que no exi.ste com-
ponente transversal de V , Esto da como resultado una inicia-A
ción suave del movimiento, 1o que constituye La razón por la
cual el ángulo BAO debe ser 90?
Sinembargo, la aceleración inicial no es cero, por 1o tanto eI
jerk es infinito, hay una carga aplicada súbitamente y esto
trae como resultado ruídos y vibraciones especialmente si la
rapidez es grande.
El procedimiento para obtener gráficamente este r¡e canismo
es el siguiente: habiendo decidido el valon de r dibuje la cir-
cunferencia AKD de g. Divida esta circunferencia en el número
de ranuras deseado, cole ando 2 ranuras A y D equidistantes
de Ia línea de centros BO.
Desde A dibuje una línea perpendicular a AO la cual intercepta
Ia línea de los centros en el punto B eI cual es eI mejor eje
de rotación para C. Esto define el radio AB, La curva MdN213
debe ser tal que proporcione cierta tolerancia al elemento con-
ducido; haga eI ángulo MBN = ángulo ABD; haga la distancia
Ad un poco mayor que ab.
Debido a que este es un método de error y ensayo si el tama-
ño de las partes no es Io suficientemente grande para acomodar
los ejes, chavetas y mEurzanas, escoja un valor mayor para r.
2t4

BIBLIOGRAFIA
AMERICAN INSTITUTE OF STEEL CONSTRUCTION. Manualof Steel Construction. Seventh Edition, 1979.
CATALOGO DE CORREAS "DAYCO", 1990.
CHUREH, J.A. On Harrisbergerts Adjustable
FAIRES, Virgil Moring. Diseno de Elementos de Máquinas.4a Edición. Barcelona, Montaner y Simón S.A., L977.
FAIRES, Virgil Moring. Mechanism Fith Edition. McGraw-Hill Koga Kusha. International Student Edition, 1960.
FERNANDEZ, Claudio. Diseño Mecánico. CaIi, Universidaddel Valle, División de Ingeniería, Departamento de Inge-niería Mecánica, 1970 (Conferencias).
HAM, Crane y ROGERS. Mecánica de Máquinas.
KOZHEV NIKOV, S. A . Mecanismos. Barcelona, Ed. GustavoGili, 19?5.
MATTHEI. G. K. y TESAR, D. Formalized Matrix Mett¡odfor nlJr Derivative Trapezoidal Motion Specificationsform cams.Communications of the WorldCongress for the Theory of Machines and Mechanisms.Yugoblavia, Kupari, 1971.
OBERG, Erik y JONES, F. D. Manual Universal de la Téc-nica Mecánica. Barcelona, Editorial Labor S.A., L977.
2t5

SERVICIO NACIONAL DE APRENDIZAJE ''SENA'" DiViSióNIndustrial. cursos de Aprendizaje. Auxiliar del Mecánicode Mantenimiento Industrial. Bogotá, 1968.
SHIGLEY, Joseph Edward. Diseño en Ingeniería Mecánica. zaEdición. México, McGraw-Hill, 1g?b.
SHIGLEY, Joseph Edward. proyecto en Ingeniería Mecánica.1a Edición. México, McGraw-Hill, 1g?g.
SHIGLEY' Joseph Edward. Análisis cinemático de Mecanismos.la Edición. México, McGraw-Hill, 19?6.
SHIGLEY, Joseph Edward. Kinematic Analysis of Mechanisms.second Edition. Méxieo, McGraw-Hill Book co., 1969.
TAo, D. c. Fundamentals of Applied Kinematics. First EditionAddison \üesley publishing Co., 196?.
2L6

A NEXOS

PROYECTO: LABORATORIO DE MECANISMOS
VOLUMEN TI
MANUAL DE PRACTÍCAS
CARLOS A. CATACHTJNGA M.
PEDRO J. CARREÑO G.
Trabajo ife Grado presentado como requi-sito parcial para optar al título deIngeniero Mecánico
Director: Ing. DIEGO LI,IS CARABALI
UniYcsidod áutonomo da 0(cidciltc
Depto Biblio{xo
coRpoRAcroN AuroNoMA DE occrDENTE 35 6 6 rrDIVISION DE INGEMERIA
PROGRAMA INGENIERIA MECAMCAcALI, 1983
l8f '"?t¿?ÉL ;rilil{lutüliluilütuuilüilil $lt
o(1X\-

Tá3 /' !,! 3!0-aflev.<,'
TABLA DE CONTENIDO
VOLUMEN IT
PRACTICA 1. Montaje: Manivela-Biela-Corredera
PRACTICA 2. Montaje y Alineamiento de PoleasPlanas
PRACTICA 3. Montaje y Alineación de Poleas en V.
PRACTICA 4. Montaje de Engranajes de Dientes Rec-tos
PRACTICA 5. Montaje de Engranajes Cónicos Rectos
PRACTICA 6. Montaje de Piñones de Cadena
PRACTICA 7. Montaje de Conjunto sin-F'in Corona
PRACTICA 8. Montaje de Piñones Helicoidales conEjes que se cruzane
PRACTICA 9. Frenos
PRACTICA 10. Construcción de Mecanismos (Meca-nismo de Malta, Levas y Seguidores)
PRACTICA 11. Montaje de Acoplamientos
Univanidcd üutonomo de 0ttidctttc
l}egto EibliorP.o

LISTA DE PLANOS
VOLUMEN II
PLANO 1. Estructura ó Mesa
PLANO 2. Ejes I-II-UI
PLANO 3. Polea en V.
PLANO 4. Mesa para Transmisión Flexible
PLANO 5.
PLANO 6. Polea Plana
PLANO 7. Piñón Para Cadena
PLANO 8. Piñón para Cadena
PLANO 9. Fuerzas en Engranaje Helicoidal
PLANO 10. Tornillo Sin Fin
PLANO 11. Sistema Sin Fin - Corona
PLANO 12. Tornillo Sin Fin Recto
PLANO 13. Manivela-Biela-Corredera
PLANO 14. Polígono de Velocidades
PLANO 15. Polígono de Aceleraciones

PLANO 16. Sistema Piñones Cónicos
PLANO 17. Piñón Cónico Recto
PLANO 18. Leva de Intermitencia
PLANO 19. Combinaciones de Levas
PLANO 20. Leva con Balancín Plano
PLANO 21. Levas Planas con Ranuras
PLANO 22. Leva Cilíndrica de Varias vueltas
PLANO 23. Leva Plana-Seguidor Cilíndrico
PLANO 24. Leva Alabe
PLANO 25. Leva de Corazón
PLANO 26. Excéntrica-seguidor Cuchillo-Plano
PLANO 2?. Leva con Varilla de Pié P1ano
PLANO 28. Leva con Retorno instantáneo del Seguidor
PLANO 29. Leva Cilíndrica
PLANO 30. Craz de Malta-Cuatro Bamas
PLANO 31. Cruz de Malta Externa
PLANO 32. Cruz de Malta Interno
PLANO 33. Proyecto de una Cruz de Malta
PLANO 34. Mesa Módulo 1
PLANO 35. Mesa Módul.o 2
PLANO 36. Mesa Módulo 3"

CORPORACION AUTONOMA DE OCCIDENTEDIVISION DE INGENIERIASDEPARTAMENTO DE MECANICA
LABORATORIO DE MECANISMOS
PRACTICA 1. MONTAJE: MANIVEI,A- BIELA - CORREDERA
OBJETIVO
A. Aprender en forma visual como es la transformación de
los diferentes movimientos.
B. Conocer una biela, uh Pistón
INTRODUCCION TEORICAÉ:
Con este mecanismo transformamos el movimiento circular
continuo en rectilíneo alternativo.
Sobre el eje en el que está montado el volante que dá eI movi-
miento circular continuo, está montado aI final de la biela y
al otro extremo de ésta, va montado el pistón que para nos-
otros es la misma cgrredera, el cual eStá guiando por una ttca-
misatt o deslizadora.
El movimiento circular continuo que transmite el rrclante al ser
acciom.do a Ia manivela que para nuestro caso, es circular y se
encuentra unida a la biela en punto tangencial de radio (rL es

transmitido a la biela y éste a su vez 1o transmite a la corre-
dera o pistón, convirtiendo su movimiento en rectilíneo alterna-
tivo.
PREGUNTAS:
1. Qué es una biela?
2. Qué es una manivela?
3. Cuáles son los puntos muertos y en qué momento se
logran en el conjunto manivela-biela-corredera.
4. Qué es carrera?
5. Determine Ia carrera de este conjunto?
6. Cuál es el radio de la manivela?
7 . La carrera tien e alguna relación con la biela, con la
manivela, explique su negación o afirmación.

CORPORACION AUTONOMA DE OCCIDEI\TEDIVISION DE INGENIERIADEPARTAMENTO DE MECANICA
LABORATORIO DE MECANISMOS
PRACTICA 2. MONTAJE Y ALINEAMIENTO DE POLEAS PLA-NAS.
OBJETIVO
A. Aprender a montar y alinear poleas planas y st¡s respecti-
vas correas.
B. Detectar errores de montaje y suS consecuencias tanto en
Ia máquina como en el elemento.
INTRODUCCION TEORICA
Para transmitir fuerza y movimiento entre ejes paralelos o en
ángulo que se encuentren a cierta distancia entre sd, se utilizan
los mecanismos de er¡lace flexible. Constan de polea y elemento
flexible que en este caso es una correa plana.
La rotaeión se transmite por Ia fuerza de rozamiento que apare-
ce como consecuencia de una presión entre loS cuerpos en contac -
to (la polea y la correa).

MATERIALES
Dos poleas planas con sus respectivos ejes y chumaceras
Una correa Plana
Un juego de llaves poligonales y de bocas abiertas
Martillo de Bronce
Juego de llaves AIIen
Regla rígida rectificada de 1/8 x 1 mt.
Flexómetro
Tacómetro
PROCEDIMIENTO
En el Banco metálico de montaje, efectuar el montaje de las
dos poleas planas en sus respectivos ejes.
Efectúe el alineamiento y tensionamiento de las poleas planas
utilizando la regla rígida.
Mida las r.p.m. de los ejes conductor y conducido.
PREGIJNTAS
1. por qué se deben alinear las poleas con una regla rígida y
no con una Piola.

2. De qué materiales se pueden construir estas poleas?
3. Cómo se dividen las poleas planas en cuanto a su construc-
ción?
4. Diga las partes principales de una polea plana?
5. Diga algunas clases de poleas planas?
6. Deduzca una fórmula para encontrar Ia longitud de la correa
plana?
7. Deduzca las fórmulas para encontrar la relación de transmi-
sión, partiendo de la velocidad tangencial de las poleas.
8. Qué ventajas da eI utilizar una polea tensora en el sistema?
9. Por qué razones Ia máxima relación de tra¡¡smisión en
correas planas es de 1 a 5 ?
10 Qué es una correa?
11 Cómo es Ia construcción de correas planas. Materiales,
capag, etc.
tZ Cuáles son las condiciones para un buen montaje de correas
planas.
13 Por qué eI arco de contacto debe tener un valor mínimo en
las poleas planas. Escriba la fórmu1a para el arco de con-
tacto.
t4 Qué es tensión efectiva?
15 Halle Ia fórmula para Ia capacidad transmisora de Ia correa
en caballos, de una correa plana?
Univcsidod oulonomo ft 0rtidsrtc
Oepto Eibliotffo

16 Escriba la fórmula para calc.ular el ancho mÍnimo de una
correa plana.
l? Cómo calcularía la longitud de una correa cruzada?
18 Diga algunos sistemas de unión de las correas planas
19 Haga algunos esquemas para montajes de correas planas
de ejes que no son paralelos y de ejes en ángulo
20 Haga una tabla de ventaias y desventajas entre correas
planas y comeas en V.

CORPORACION AUTONOMA DE OCCIDEI\TIE
DIVISION DE INGENIERIAóspenteMENTo DE MEcANTcA
LABORATORIO DE MECANISMOS
PRACTICA 3. MONTAJE Y ALINEAMIENTO DE POLEAS EN V.
A.
OBJETIVO
Aprender a montar
correas
B. Detectar erores
ta máquina como
y alinear Poleas enVysusresPectivas
montaje Y sus
el elemento.
congecuencias tanto ende
en
INTRODUCCION TEORICA
Paratrarrsmitirfuerzaymovimientoentreejesparalelosque
se encuentren a cierta distancia entre sí' se utilizan los meca-
nismosdeenlaceflexible.Estosconstandepoleayelemento
flexible.ElelementoflexibleenestecasoeslacorreaenV.
con las correas y los cables Ia rotación se transmite por Ia
fuerza, de rozamiento' que aparece como consecr¡encia de una
presiónentreloscuerposencontacto(lapoleaycorreao
cable).

MATERIALES
Dos poleas en V tipo A con sus respectivos ejes y chumaceras.
Correas en V tiPo A
Juego de llaves poligonales y de bocas abiertas
Martillo de bronce
Juego de llaves Allen
Regla rígida rectificada de 1/8 x 1 metro
Flexómetro
Tacómetro
PROCEDIMIENTO
En el banco metálico de montaje' efectúan el montaje del motor
con su respectiva polea en V y eI eje con chum¿rceras y su
polea en V uniéndolas por la correa en V.
Efectúe eI alineamiento y tensionamiento de las poleas en V
utilizando la regla rígida rectificada.
Mida las r.p.m. de los ejes conductor y conducido'

PREGUNTAS
1. Cuáles son las ventajas de usar poleas en V?
2.Segúnsuformadegargantaoranura'cuántasclasesde
poleas en V haY? Cite algunas'
3. Según su forma de montaje en eI eje, cite algunos tipos de
poleas en V.
4. Deduzca una fórmula para enccntrar la longitud de Ia correa
en V.
b. Deduzca las fórmulas para encontrar la relación de tra¡rsmi-
sión partiendo de la velocidad tangencial de las poleas?
6.Quéventajasdaelutilizarunapoleatensoraenelsistema?
7. Cuáles son laS relaciones de transmisiones máximas para
poleas en V?
g. Cómo es el principio básico de funcionamiento de las co-
rreas en V?
9. Cuál es la utilidad de las correas en V?
10 cuáles son las partes constitutivas de una correa en v?
11 CuáIes son loS tamaños normales de las correas en v y en
qué se diferencian entre sí'
tZ Cuál es la raz6n máxima de velocidad para tmnsmisiones
con correas en V.
13 Cuáles son laS condiciones para un buen montaje de correas
en V.

t4 Qué puede decir de las correas en V eslabonadas y de las
dentadas?

CORPORACION AUTONOMA DE OCCIDENTE
DIVISION DE INGENIERIADEPARTAMENTO DE MECANICA
LABORATORIO DE MECANISMOS
PRACTICA4.MoNTAJEDEENGRANAJESDEDIENTESREcToS
OBJETTVO
Comosemontanlosengranajesycómoseobtieneyutiliza
la relación de transmisión'
INTRODUCCION TEORICA
Los engranajes sirven para transmitir un movimiento rotativo
entre dos ejes.
La rotación se transmite por medio de engranajes cilíndricos,
cuando los ejes son Paralelos'
Los engranajes se düerencian además' por la fqrra de los
dientes; Ia gener atriz de las superficies latelales de los dien-
tes es paralela al eje de rotación en los engranajes rectos'
para el trazado de los perfiles de los dientes en los engranajes

cilíndricos circulares, se emplean en Ia práctica la envolvente
de circur¡ferencia.
MATERIALES
Bastidor para montaje de engranajes
Cuatro ejes de 1" pa 43 cms' de longitud
Ocho cojinetes de ltt de sopcrte lateral
Un juego de engranajes (6) rectos
Un juego de llaves Allen
Un juego de llaves poligonales y de bocas abiertas
Martlllo de Bronce
Tacómetro
PROCEDIMIENTO
Primera Parte.
Monte un tren sencillo de engranaies; con eI tacómetro tome
Ias r.p.m. del eje conductor y conducido y obtenga las relacio-
re s de transmisión en cada uno de ellos'

Segunda Parte.
Monte en eI tren anterior, una rueda intermedia; tome las
r.p.m. de los ejes conductor y conducido y obtenga la relación
de transmisión.
TABLA DE DATOS
MONTAJEZZZNN1 m 2 t 2 PRACTICA CALCULO
Primera parte
Segunda parte
Tercera Parte
Monte un tren compuesto con 4 engranajes, utilizando como primera
conductora y como úItima conducida. Tome las r.p.m. de los ejes
conductor y conducido (primero y úItimo) y obtenga la relación de
transmisión.
Cuarta Parte.
Monte un tren compuesto con 6 engranajes como primera conductora
y como última conducida.
¡j¡¡v66idcrl 0utonomo da Occithntc
0epr¡ Srbliol¿to

Tome las r.p.ffi. de los eies conductor y conducido (primero y
último) y obtenga la relación de transmisión.
Nota: Para hacer girar los engranajes hágalo de la palanca
dispuesta para tal fín en el lado izquierdo de1 bastidor y asuma
usted mismo un número de r.P.rrr.
MONTAJE Z Z Z Z Z Z N N iI 2 3 4 5 6 1 2 PRACTICA CALCULO
Tercera Parte
Cuarta Parte
Z = Número de Dientes
N = R. P.M.
! = Relación de Transmisión
Para efecto de montaje de los piñones téngase en cuenta la
siguienta tabla:
MODULO Juego Mó- Juego Módu Juegom. m. dulo m. m. lo m' m'
0.8 a 2 0.05 a 0. 10 4 0.L2 a 0.20 10 0.28 a 0.40
2 a 2.5 0.0? a O.t2 5 O. 15 a O.22 tZ 0'35 a 0'50
2.5 a 3 0.Og a 0.13 6 O.27 a 0.28 16 0'46 a 0'68
3.5 0.10 a 0.17 8 O.22 a 0.35 25 0'63 a L'OZ

PREGIJNTAS
1. eué es un tren sencillo de engranajes. Uno compuesto?
2. Qué ventajas y desventajas tiene cada uno de los métodos
de ajuste de engranaje?
3. Utilizando la velocidad tangencial en el diámetro primitivo,
deduzca la relación de transmisión sencilla?
4. Compare las relaciores de transmisión encontradas en las
partes primera y segunda y explique la taz6n de su discre-
pancia o igualdad?
b. eué otros elementos del tren (lra. y 2da. parte) nos dan
también la relación de transmisión?
6. Cuál es eI sentido de giro de los ejes conductor y conduci-
do en Ia primera parte y cuáI en la segunda parte y por
qué?
7. Deduzca una fórmula para encontrar la relación de transmi-
sión en un tren compuesto de cualquier número de ruedas?
8. De qué depende la capacidad de cargr de un piñón?
9. Según la disposición de sus ejes y el tipo de dentado, cómo
se clasifican los engranajes?
10 Escriba Ia nomenclatura principal de los engranajes?
11 Dónde encuentra usted aplicaciones de engranajes, cite algu-
nos ejemplos.

tZ Qué cuidados especiales de deben tener al efectuar montaje
de engranajes?
13 En un mal montaje qué clase de contactor entre dientes
encontramos?
t4 Qué son las marcas de referencia de un par de engranajes?
15 Cuáles son las fallas más comunes de los engranajes y el
por qué de estas fallas?

CORPORACION AUTONOMA DE OCCIDENTE
DIVISION DE INGENIERIADEPARTAMENTO DE MECANICA
I,ABORATOR,IO DE MECANISMOS
PRACTICAS.MoNTAJEDEENGRANAJEScoNIcoSREcToS
OBJETIVO
Como se monta esta clase de engranajes'
INTRODUCCION TEORICA
Los engranajes cónicos de dentado recto efectúan la tra¡rsmisión
del movimiento de ejes que se cortan, generalmente en ángulo
recto.Seutilizanparavelocidadesmedianasyproducenruido.
MATERIALES
Bases para montaje de estos Piñones
Dos Ejes de ltr x 314 x 6" de longitud
Dos engranajes de dientes cónicos rectos
Un juego de llaves Allen
Martillo de Bronce
PROCEDIMIENTO
Monte en sus respectivas bases los dos Piñones. Aplicando azul
de prusia, negro de humo o cualquier otro colorante apropiado

entre los dientes de los piñones, déjelos montados correcta-
mente.
PREGI]NTAS:
1. Qué relación de transmisión existe entre estos dos piñones?
2. Cuál es el sentido de giro de conductor y conducido?
3. Cite algunas aplicaciones de este tipo de engranajes?
4. Qué es un engranaje cónico en espiral?
5. Qué es un engranaje cónico zerol?

CORPORACION AUTONOMA DE OCCIDENTEDIVISION DE INGENIERIADEPARTAMENTO DE MECANICA
LABORATORIO DE MECANISMOS
PRACTICA 6. MONTAJE DE PIÑONES DE CADENA
OBJETIVO
A. Aprender a montar piñones de cadena y sus respectivas
cadenas.
B. Detectar errores de montaje y sus consecrrncias tanto
en la máquina como en el elemento.
INTRODUCCION TEORICA
Para la transmisión de fuerza y movimiento entre ejes parale-
Ios que se encuentren a cierta dista¡rcia entre sí, se utilizan
los mecanismos de erüace flexible. Estos constan de piñones
para cadena y el erüace flexible es la cadena.
La rotación y fuerza se transmiten debido al arrastre entre el
diente del piñón y el eslabón.
MATERIALES
Dos piñones para cadena con sus respectivos ejes y ehumaceras.
Cadena de acuerdo aI paso de los piñones.

Juego de llaves poligonales y de bocas abiertas
Juego de llaves Allen
Martillo de Bronce
Regla rígida de 1/8 x 1 mt'
Flexómetro
Tacómetro
PROCEDIMIENTO
En el banco metárico de montaje, efectuar el montaje de ros
dospiñonesparacadenaensuejerespectivoerüazadospor
medio de Ia cadena.
Efectúe el alineamiento y tensión del conjunto u tilizando Ia
regla rígida rectificada'
Mida las r.p.rrr. de los ejes conductor y conducido'
PREGUNTAS
1. En que'forma tensionó la cadena?
2. cuáI es Ia raz6n de transmisión entre rueda motriz y rueda
acciomda?
3. Qué tipos de ruedas para cadenas hay?
4.Quéventajasydesventajaspresentenunatransmisiónpor
cadena?

5.Cuáles}anormageneralparadeterminarladistanciaentre
centros?
6. Qué papel desempeñan las ruedas locas en una transmisión
por cadena?
7.Cuálessonlasrelacionesdetransmisiónmáximaspara
cadenas?
8. Cuáles son las partes constitutivas de una cadena?
9.Cuálessonlaspartesprincipalesdeunpiñónparacadena?
10Hallelafórmulaparacalcularlapotenciaquepuedetrans-
mitir la cadena'

CORPORACION AUTONOMA DE OCCIDENTEDIVISION DE INGENIERIASDEPARTAMENTO DE MECANICA
LABORATORIO DE MECANISMOS
PRACTICA 7. MChTTAJE DE CONJI'NTO SIN IIIN CORONA.
OBJETIVO
Aprender a efectuar un montaje de conjunto Sin Fin-Corona.
INTRODUCCION TEORICA
Los conjuntos Sin Fin-Corona de dentado recto sirven para
transmitir altas potencias y velocidades.
El tornillo Sin Fin siempre engrana con una rueda, presentando
este sistema propiedades especiales que los hace insustituibles
con muchas aplicaciones, tales como, la obtención de grandes
reducciones de velocidad, funcionamiento silencioso y reducido
espacio.
Los tornillos sin fin pueden tener uno, dos, tres, o más entra-
das.
MATERIALES
Un tornillo Sin Fin
Una corona
Dos cojinetas para tornillo Sin Fin

Soporte de corona
Juego de llaves poligonales y de bocas abiertas
Juego de Llaves Allen
Tijera para cortar lámina
Lámina o shim de varios espesores (0.002; 0.004; 0.0006).
PROCEDIMIENTO
Monte el tornillo Sin Fin en sus respectivos cojinetes asegufan-
dose que después de apretados los cojinetes, el tornillo sin Fin
quede girando libremente con su nespectivo soporte; monte ahora
}a corona de forma ta} que engrane con el tornillo Sin Fin'
A1 ajustar eI soporte de la corona sobre eI ba¡rco de montajes'
debe asegurarse que entre eI tornillo Sin Fin y la corona queden
Ios huelgos necesarios para que estando la corona engranada
con eI tornillo Sin Fin, éste quede girando tan libremente como
cuando estaba montado solo sin la corona. si observa algún ajus-
te rrcalcett el soporte de Ia corona hasta obtener un montaje
comecto. si es necesario use azul de prusia o negro de humo
entre los dientes.
Haciendo urul marca entre la corona y el tornillo Sin Fin' cuente
cuantas vueltas ha de $irar eI tornillo Sin Finr cuando la corona

ha girado una vuelta comPleta.
PREGI'NTAS
1. Cuál es la relación entre el Sin Fin y la Corona?
2. Por qué un conjunto Sin Fin-Corona son capaces de trans-
mitir grandes Potencias?
B. Normalmente de qué material están hechos el Sin Fin y la
Coror¡a y Por quét
4. Preferencialmente qué tipo de lubricante se usa en el sis-
tema tornillo Sin Fin - Corona.
5. Qué relación debe haber entre el diámetro del tornillo y
la corona? Por qué?
illi*oiac¡ -luronomo de octiünte
f)eoro $i[li¡ts{q

CORPORACION AUTONOMA DE OCCIDENTEDIVISION DE INGENIERIASDEPARTAMENTO DE MECANICA
LABORATORIO DE MECANISMOS
PRACTICA 8. MONTAJE DE PIÑONES HELICOIDALES CON
EJES QUE SE CRUZAN.
OBJETIVO
Cómo ge montan los engranajes y cómo se obtienen y utilizan
la relación de transmisión.
INTRODUCCION TEORICA
Los engranajes sirven para transmitir un movimiento rotativo
entre dos ejes.
La rotación se transmite por medio de engranajes hiperboloides
cuando los ejes se cruzan forma¡rdo cualquier ángulo.
Estos engranajes se utilizan para velocidades elevadas; son más
silenciosos que los dientes rectos pero tienen la desventaja de
causar fuerza axial.
MATERIALES
Bastidor para montaje de los engranajes
Dos engranajes helicoidales

Cuatro a¡rillos de sujección
Un juego de llaves Allen
Martillo de Bronce
Azul de Prusia o negro de humo
PROCEDIMIENTO
como los dos piñones ya están montados en sus respectivos
ejesprocedaasualineamiento,colservadoloshuelgosentre
ambos piñones. Aplicando azul de prusia u otro cdorante
apropiadoenlosdientesdelospiñores,déjelosmontadoscorrec-
tamente.
PREGIJNTAS
lSegúnelnúmerodedientesdeestospiñones,quérelación
de transmisión se Puede obtener?
2 CuáI es eI sentido de giro de conductor y conducido?
g Qué otros tipos de piflones helicoidales existen?
4Escribalasrecomendacionesespecialesquesedeban
cumplir para eI engranaje de ruedas helicoidales?

CORPORACION AUTONOMA DE OCCIDENTEDIVISION DE INGENIERIASDEPARTAMENTO DE MECANICA
LABORATORIO DE MECANISMOS
PRACTICA 9. FRET{OS
OBJETryO
Conocer el comportamiento interior de un freno con zapatas
interiores.
INTRODUCCION TEORICA
El tipo de freno con zapatas interiores se caracleriza por tener
Ias zapatas dispuestas interiormente aI tambor a frenar.
Los frenos son elementos de máquinas que absorben toda la
energía cinética y potencial en un proceso de frenado, dando
como resultado la detención de las partes en movimiento; la
energía aborbida se disipa en calor.
PROCEDIMIENTO
En el banco de montaje procédase a efectuar un frenado suave
con la palanca dispuesta para tal efecto. Observe eI movimiento
desde esta palanca hasta el lugar de las zapatas. Observe el Iu-
gar de pivote de ambas zapatas. Observe la leva que efectua el

desplazamiento de las zapatas. Obseve que hace regresar las
zapatas a su lugar inicial cuando ha cesado Ia acción dei fre-
nado. Observe la capacidad interior para Ia disipación de calor.
PREGIJNTAS
1. Dé una descripción breve sobre como trabaja este freno.
2. De qué depende la capacidad de frenado?
3. Diga otras clases de frenos?
4. Para aumentar la disipación de calor qué se puede emplear
en la carcaza?
5. Cómo debe ser la fuerza de acción en este tipo de freno?

CORPORACION AUTONOMA DE OCCIDENTEDIVISION DE INGENIERIASDEPARTAMENTO DE MECANICA
I-ABORATORIO DE MECANISMOS
PRACTICA 10. CONSTRUCCION DE MECANISMOS (MECANIS-MO DE MALTA, LEVAS, Y SEGUIDORES)
OBJETTVOS
Diseñar mecanismos de Ma1ta de n pasos y diseñar mecanismos
de leva y su seguidor, de formas diferentes.
INTRODUCCION TEORICA
El mecanismo de la Cruz de Malta consiste en una manivela con
su fespectivo eje y la rueda de la Cruz en la cual los ejes de
simetría de las ranuras y de las manivelas son perpendiculares
entre sí cuando se produce el enganche o desenganche de ambas.
La manivela, que normalmente, gira a velocidad angular cons-
tante, lleva un rodillo que se introduce en la ranura.
Durante una revolución completa de la manivela, la rueda de Ia
crvz de malta gira una fracción de vuelta, definida por el número
de ranuras que existen. EI segmento circtüar ligado a la manivela
proporciona un freno de Ia rueda de la crruz contra rotaciones in-

debidas cuando el rodilto está fuera de Ia ranura, y así la ma¡r-
tiene corocada correctamente para que el rodillo se pueda intro-
ducirenlaranuracorrespondientesindificultad.
El instructor mostrará un mecanismo de malta de x Pa6os con
relación de 5 a 1 y tiempos de paradas iguales'
EI instructor mostrará unas levas y sus seguidores de formas
diferentes.
PROCEDIMIENTO
A. Diseñe un mecanismo de Malta según el requerimiento del
instructor.
B. Diseñe una leva y su seguidor según el requerimiento del
instructor
C. Diga algunas aplicaciones de estos mecanismos'
PREGUNTAS
1. Con qué otro nombre se conoce la Cruz de Malta'
Z. Cuáles son los elementos mínimos indispensables para el
proyecto de una .Ctuz de Malta'
g. Cuántas ranuras como mínimo son indispensables en una
Cruz de Malta.
Unin¡sidcd luionomo de Ocdd;orn
Deplo B¡bl'ota.o

4.
5.
Diga algunos ejemplos donde se empleee Ia Ctuz de Malta.
En un mecanismo de Ctuz de Ma1ta interna cómo gira la
rueda de la crvz con respecto al sentido de giro de la
manivela.

CORPORACION AUTONOMA DE OCCIDENT EDIVISION DE INGENIERIASDEPARTAMENTO DE MECANICA
I-,ABORATORIO DE MECANISMOS
PRACTICA 11. MCNTAJE DE ACOPLAMIENTOS
OBJETIVO
Conocer dos de las varias clases de acoplamientos que existen
y aprender a efectuar su montaje y alineación.
INTRODUCCION TEORICA
Acoplamiento es un órgano mecánico que se les puede llamar
también, uniones tanto para comunicar el movimiento entre dos
árboles, como para unir o acoplar las partes de un árbol de
transmisión, que están colocados según un mismo eje, de
ma¡era que se puede considerar como prolongación una parte
de la otra; también sirven para comunicar el movimiento entre
dos ejes en línea recta con dirección paralela, inclinada o en
planos diferentes.
Los acoples se dividen en: acoples rígidos y acoples flexibles.
Acoples rígidos: se usanr para unir ejes que están perfectamente
alineados y los cuales no tienen esfuerzos de torsión muy gra¡r-
des.

Dentro de los acoples rígidos citaremos:
De ma¡rguito
De platos
De comPrensión
De Mordaza
De Bridas
Dentados (a escuadra o con espiral)
Junta Cardánica
Los acoPles flexibles son:
Corona de Pernos
Renold
Flex-Hol
Tipo Cenidor
Tipo metálico modelo elástico
De cruceta
Aarflex
De cadena tiPo Morse
Paranuestrocasotenemosacoplestiporígidoyflexible.
Rígidos:
Junta Cardánica

Dentado en esPiral
Flexible:
De cruceta o trPata de Aranatr
MATERIALES
Una junta cardánica sencilla
Un acoplamiento de dentado en espiral
Un acoPlamiento de cruceta
Soportes y ejes para cada uno de estos acoplamientos
una promada o una batería o un caribrador de galgas o un indi
cador de carátula
Un juego de llaves Allen
Un martillo de bronce
PROCEDIMIENTO
Enelbancometálicodispuestoparaestemontajeprocédasea
instalar la junta cardánica. seguidamente monte el acople den-
tado en espiral y alinielo horizontal y verticalmente' finalmente
monteelacopledecrucetao||platadearaña''ytambién
alinielo.
Algunas fcmas de alinear los acoplamientos
La alineación correcta de los acoplamientos es de gran impor-
tancia para obtener el correcto funcionamiento de estos'

Asegúrese que las
el eje donde van a
dos mitades del acople son concéntricas con
ser montadas y si sus caras con paralelas'
Para alinear con una Plomada¡
Ajústese la mitad de un acoplamien-
to de manera que su cara quede Per-
fectamente a Plomo (vertical)
Para lograr esto cuélguese una plo-
mada sobre su cara lateral. RePita
la operación Para la otra mit ad'
Con ayuda de una batería:
Mantenga un cmductor eléctrico des-
nudo a una distancia conveniente de
Ia cara del acoplamiento. Hágase gi-
rar esta mitad del acoplamiento' si
está descentrada, hará contacto con
el conductor cerrando de esta manera
el circuito que es acusado por el tim-
bre. Repítase eI mismo Proceso con
la otra mitad del acoPlamiento.

Con ayuda del Calibrador de Galgas: Ajústese las dos mitades
del acople. Haga cuatro marcas a 90" en acople. Introdúzcase
una ga"Iga de un espesor adecuado al diámetro exterior del aco-
ple. Si en todos los cuatro puntos marcados entre la galga con
Ia misma facilidad el acople está centrado, o de lo contrario
procédase a alinearlo.
Con ayuda de un indicador de carátula: Es eI méOdo más preci-
so. Móntense las dos mitades y ajustadas. Monte el indicador
de carátula sobre eI eje en el cual está mmtado el acople. Gire
una vuelta completa y mire Ia aguja del indicador; s[ Ia aguja
no se desplaza de su lugar inicial, el acople está alineado
(horizontal o vertical) de acuerdo donde se haya colocado eI
brazo del indicador. Procédase de Ia misma fortna en el sentido
que hace falta (horizontal o vertical).
PRE GT]NTAS
1. CuáI es la diferencia entre acople dentado recto y en espiral.
Cuándo se usa cada uno.
2. Qué es una Junta Cardánica Simple y una Dob}e. Cuando se
usa cada una.
3. Qué es un acople de cruceta (pata de araña). Por qué es
flexible?

4. Cuáles son las principales causas que producen la des-
alineación de los acoplamientos?
5. Cuáles son los objetivos principales de los acoples
flexibles.

l¡fFzlrfo
96- (,t
=ooGu¡trf Él
==<r-o=P=
oo=32z(Jl¡l-
l¡fc¡
9É,o|={1É,ooJ
Jo
6É,
Ec3>-l¡¡- JÉo
@¡¡6
EHáP3oa

l¡lFzH-cl(,< c,too
E-ñc¡
=<5-ozP=
U'o=32
zúl¡f
=trfoIÉ,okGooJ
zI(tsElr¡a,oo
J:fÉ,l¡lFr
H¡
FII
Hc'}lr¡?t||
Olzo-Jo.
fooE
3E q¡¡- JEo
I
J torft
torfl
!otr)
o ¡¡t s3
1ll
(, 1l¡ tÉt 1,l.
o F, tt I
¡$lJ
E!o
! !L t

I l¡¡IFlzI l¡ft_c¡tz-l -t= c,lx ctt=oo
G l¡f|¡|O
=É¡
5l
(\¡olrl
a¡¡ato¿
zoC'gÉ,¡¡v,@o
U'o=9zEl¡¡
=l¡JoIG.-.L-
É,oe9 lalJI
(É,l¡,F.
l¡lEÍ
5
blc¡
b,Eat12l
Or
-2
o,
JÉ
oÉ3sqÉ-J It
i'/ A \',\
\ ",.\
| -/ ,' ,,.'.. t.-\-.1-/ ,t ./\:=-E:.i
I
zIoC)||¡o
(,zl ,¡/rc

l¡fF-lrfc¡6C'ol¡fc¡
-
-oED
lol<c¡6Glú
=-3
G¡ooaaE!o¿
2ogEl¡,ooo
3no-3t,-I)
=C'lrf
=l¡¡oo-Gl-
Go@
J
J
É,lrlF.
l¡¡FÉo,
Jlrlolr¡Eo.I
aD:!|!
56EaCot:00cI6t-
ol2o2
o.
Io.5q)(D (,iz ¡Hoo
t¡¡c¡

l¡lF-¡¡¡eC'C'olúc¡
ü-oF3
fr|ootaIoo2
u,o=U'-zC)1r¡
=l¡loo-GoEGooJ
JsEl¡lF-
ol-o2Jo.
Jg¿et¡ i ..9¿81

lrfFzlrfe
aC)=odofrx=<5t
zP=
Qo=9,zEl¡¡
=l¡Jcl
IGoFÉ,ooJ
É,l¡lF.
R9_te€E6
J(,o¡l
JfrG
3" {;=J2o (t
gcl
aac¡
booboo
ttato
¡f'G¡rt
tof)\
cc¡
lG|aa
btcú
Cc¡
brOt\
tG|
0eG|
.jTao
br)GlG|
Iot?
rt
N G| F
Noeo
xEq

l¡lFzl¡fe
clC'aQdoE-üo=<5-ozoF
e
Nod
taE.gB2
U'o=ozC'lr¡
=l¡foo-É,okÉ,ooJ
É,lr,FI
Joo5
jo@t|¡o

l¡fFzl¡lc¡-C'C'ol¡¡o
-o2oF
=
c¡
o-oÉ,lrf
-2=
(\¡ooa.E
E
2
=oot3¡looo oo
=32zC)l¡J
=1r¡oIÉ,okÉ,ooJ
J
al¡¡FI
.-oIooCgCl¡¡
co
a0xotIL
o?3oc¡
(tgt¡¡
ff!
3"8tz9¡¡-JÉ,
8¡¡o
\
/\ -- --/////
II

t¡¡F=l¡Jc¡-afJe(,do
Etüo=<5-oz
P3
U'o=9,z()1r¡
=l¡¡oIÉ,okÉ,o@
J
J3G¡¡lFI
fÍ
sn $t= jHB
¡¡c¡
lrHSloolgt
IE lr--frl

l¡¡
E¡¡¡o-ct c)tt(,clo
-rr l¡¡I¡¡ o
=<=-JO
=oF3
(t,o=9,
=C)l¡¡
=l¡loIEo-Eo@
J
-o(,sÉ,lr¡ooo
ocIoa(,
3É,l¡lF-
o.?=o6
o|-o2
o-
J(,o¡¡
fo
oÉocif;21¡¡-rÉ,oo¡t
a
II
\
)()
('

l¡¡Fzlrf
^e=(,actaoF-tr¡Cl
=<=--oz
P:)
G|o3aáEoo2
oo-Iz(tlrf
=lr¡oIÉ,ok5oJ
J
É,¡¡lt:tf-
l|¡FEÉ
|r¡ó¡¡GE.o2
o(taE
c|!Coo
coF
o2DIo
co¿rGó(D El- -¡É,o
(Dl¡¡c¡
oll|¡¡l IrP

E¡Glr¡oo
0EteaLI U,o
=9zC'l¡f
=¡¡fc¡
o-É,pEÉ,o@
5
E(,T¡lL
Cr|ooaáEao-
lrlFztr¡c¡-c¡C'
<c)c¡o6ñH=<=--o
=t
J
É,¡¡FI
,
23!
e(,oú2
Hf
Fz(t
l¡lFGo-
Jl¡¡ol¡¡Eo.oz
t'Lo€a
0(,IoaoI
goÉo-
qzo=JG
o?3oct
J(,olr¡ =v,
f,<fo
ar É,
Eo 3>2 ¡¡¡- JEo
(D¡¡cl
l¡lFÉÉ
EEoo|rit ocfd||tl
3
/l/l"rt 0ü
Etao
Oat
E
t-

t
a(,
Él¡¡ooo
3t,o=3n-zC'l¡l
=l¡¡cr
IÉ,okÉ,ooJ
-ol¡¡E
G|ooa¡Cao-
l¡fF-l¡lct-tr!(,gct
=o3wt¡¡ C|
-<=-JO
zoF=
É,l¡¡F,
t
ú-?HP
(to¡zl¡¡ÉG
F2(t
l¡¡FÉ,
o-
J
l¡¡ou¡G@-I
¡!0P(,Ia
totOoo.
olzo2Jq.
oD3oc¡
C'v,l¡J
u,
fo
oÉ9dÉ>-¡¡-JÉ,o
(9go
l¡¡FEo.

a-alo
oo
zo6IE||¡oo6
oEataau¡ U'o
-34zctl¡l
=lrfo
-(,¡¡lr
G|o(D
a¡Eao-
tút-zlrfota-t
c¡ct<C'go3tc lrllrl c¡
=<5--o=b;J
JfE¡¡¡Ft
Í6
ÉorzH
fr
É-(,
t¡lFÉ,
ñ
J
¡¡o¡¡Go-o2
tacEoIottocoItoo,
Olzoz
o.
o?3oc¡
J(t(nl¡l
-o
fo
AÉ,
Ed 3>z¡¡- JÉ,9
¡¡a
trlFÉ,
É

rlÉl (
il il\|\
-q
E¡¡o6o
JsGl¡¡F(fT
F-(,
t?CIOc5 oo
=32
zC'l¡J
=l¡foIGokGooJ
-(ttrf|!
(r|oq:¡E!B-
l¡fFzl¡¡c¡-c¡(,
<C,oo-c lrltro=<5--o2
P3
oot\oa(t
$
Eo.2
Hl¡JFG
Í
lr¡olrlÉ,o.o-
ao('co(t
aoC
t5
E
oEaag,
Or-ozJA,
o?3Eo
JC)o¡¡ =g,
JÉ
oE9do>2 ¡¡¡- -GO ou
o
l¡¡Fef

ao
$É,
aI
z-@I3I v,o
=Izúlrf
=l¡fc¡
9É,okGooJ
a(,u¡|!
N@o-:aa
oz
¡¡fF-lrfe
aC)z<)do-9-üo=<5--o
=PD
El¡¡F<f-
otoFIE
E.g
H
oD36ct
É2(t
N
ts¡FGÉ
J
b¡ct
b¡ÉG-o2
o(,ac,
osCo()
6Go.
0lz
Io.
J(,v,lrl
2o
ffoÉo'd f>D-fco
(,t¡¡6
l¡¡
Ef

zI(,tɡJaoo
IEv,3
o(t
(,
.9tca
7o.E
aE
ooJ
tno=3n
z(,l¡f
=l¡JoIÉ,pEÉ,o@
J
-o|lll!
Crlo3aoE!eG
¡rlF-lr¡o
--q(,gC,3o9wl¡¡ É|
=<=-.JO
2oFD
gÉ,l¡JF.
s
Eot2uGtl
F-E
l¡¡FÉo.
lúcl
lr¡ÉoII
ol-o2
G
oa=@c¡
othl¡¡
zo
¡ErfOGgi,o<(,>2 ¡l¡l--Éo
(Dt¡¡o
l¡JF5c

E
3Ét¡|t,oo
!ga! oo
=9z()l¡J
=l¡JoIEpEGooJ
a(,l¡¡|!
GIa3a¡Eoto-
trfF=lrfcl-Cl c,¡l
É82wtro=<=--ozoFD
3El¡¡F.
Éz=üÉ()o.ZHÉ,f
É¿C)
l¡¡FGÍ
u¡cl
lr¡G@-2
3aJ
t||oC0tocAEoo
@W
F|IFlsi I iol lo,H
-te4?á]iI
clzo-A.
o?=co
JC)(n¡¡
-o
doÉgot ú>z ¡
É,ool¡l6
l¡¡FÉ,
ñ

-I(),É,l|¡g,Eo
Itt: 3r,o
-2zC'lrf
=l¡¡o
IÉ,
EÉ,IJ
!(,l¡¡|¡.
(rlo!a¡E!c2
üfFztúcl
--li g,
Ét3r,G l¡¡u¡c¡
=<=--oz
P3
J
-É,
t¡¡FI
$
NL
9
EorZ
H
F-()
lrlFEÉ
J
l¡¡ol¡¡É,6.I
oceo.
st,Cooo
ta,
0
J
olzo-d
o.¡DIa
úoü¡
-t
doÉ3:ql¡-JÉ,o
(D¡¡ct
E¡FEÉ

-IoÉlrloEo
otoa¿ 3no
=9,z()l¿¡
=lr¡o
IÉ,pE5@
J
-C'l¡¡E
G¡tTE!,
lrlF=H-Clc¡<(tgo
9wEo;<=--ct
=P=
É,¡¡
.ÍDü
Éorzl¡¡É,G,f
F=()
l¡¡EÉ
J
tücl
l¡¡É,@Ioz
aotco
cooaE.9qaIaJ
Olzoz,
Jo.
83oo
C'ol¡¡
2ct
¡EÉ,
éoú>zjl¡¡ -ÉO (9
btE
l¡lFEÉ

E('tÉl¡lú,oo
tot: 3r,o
-2zC,l¡l
=tr¡c¡
IGoFÉ,ooJ
aol¡¡b.
alo3a3Eao2
¡¡fF=l¡fc¡a6<ctao
9 rttúo
=r-ozoF3
3Él¡lFT
g
B
É(,oEf;
F-o
l¡lFEf
l¡¡o¡¡É6-o=
aoat
6.go
O!to(,EcEoa
2o2
G
o?foc¡
J(tv,lr¡
-t
eÉ
3* tU- I
trlo
l¡¡FÉ,É

-ofÉ,l¡¡3t6o
9EÉFotJ oo
=Lz()l¡¡
=l¡¡o9É,okEooJ
-ol¡¡lL
G|oC:a¡Eato2
lr¡F=l¡¡o
oei<()c¡o9wEo=<==-ozoF3
J
=É,l¡¡F-
oo
(t 9?
eC)oa,
H
Éz(,
ttlFH
u¡ol¡lÉot2
og!c
6o?tOaoIItgcI
Ol-o-(Jo.
o-3@
c¡
I
I
/
-rs*.-rrr-t'mM(Ol_\-Y t\-]-l
I
JooUJ
=g,
Jo
aÉ,
ád ú>2, jH- oo
¡¡c¡
l¡¡FÉÉ

=o.J
Eb¡v,Eo
o
oat oo
=32
z(tl¡¡
=
l¡fcl
IÉ
EÉo@
J
tolr¡lr
aao6l
aá¡tto2
l¡fFzl¡lc¡-c¡c)<(,oo
-lr trllr¡ Cl
=<<=-ozoF3
É,lr,FT
I36
E,2uGf
FzC'
l¡lFÉ,
Í
J
lr¡c¡
btEo-o2
a€
otaJ
Or
=o-JG
o?3oo
(tol¡¡
=o
d
Y; ií; ()
:lr¡- JGO
(Dgo
túFEÉ

-I(JsÉ,l¡¡doo
o
afrt
cl
€H0o(,
I0o
3r,o=9,z(,l¡¡
=l¡lo9É,b-[É,ooJ
-(tl¡¡¡!
NooaaEao2
l¡fFzt¡lcloo<()go
or lrluto;<==-ozoF
=
=Él¡lF-
I?
Eo.2l¡lÉ,cf
F-C'
¡¡¡FÉ,
Í
J
lr¡ol¡¡G@-oz
N
gozJo.
oa3Icl
(,3t,
l¡¡
zct
JÉ
oÉe¿6>- ¡l¡l-JGO o
lr¡cr
lt¡FÉÉ

IN_AI
I
NA
-oaGlr¡atloo
oo=9,z()lr¡
=
l¡¡c¡
IÉ,0EÉ,o6J
-olr¡|¡-
clo3|¡s!Eae2
l¡¡F=l¡¡c¡aIc¡c)<()6io
F-Eo
=<=--ozPD
J
E¡¡F.
o(,
(, tg(tor-
Hf
Éz(,
GI
l¡¡F
F
lr¡ol¡¡
fr
,
oc-go.
IIG,ttC'
o!
EaeDIg(,
t3'x¡¡¡
Olzo-Jo,
otDoo
(,atlr¡
=v,
c@
o.5(,)(' 0,=¡¡¡ÉO
('¡¡E
l¡¡FÉÉ,
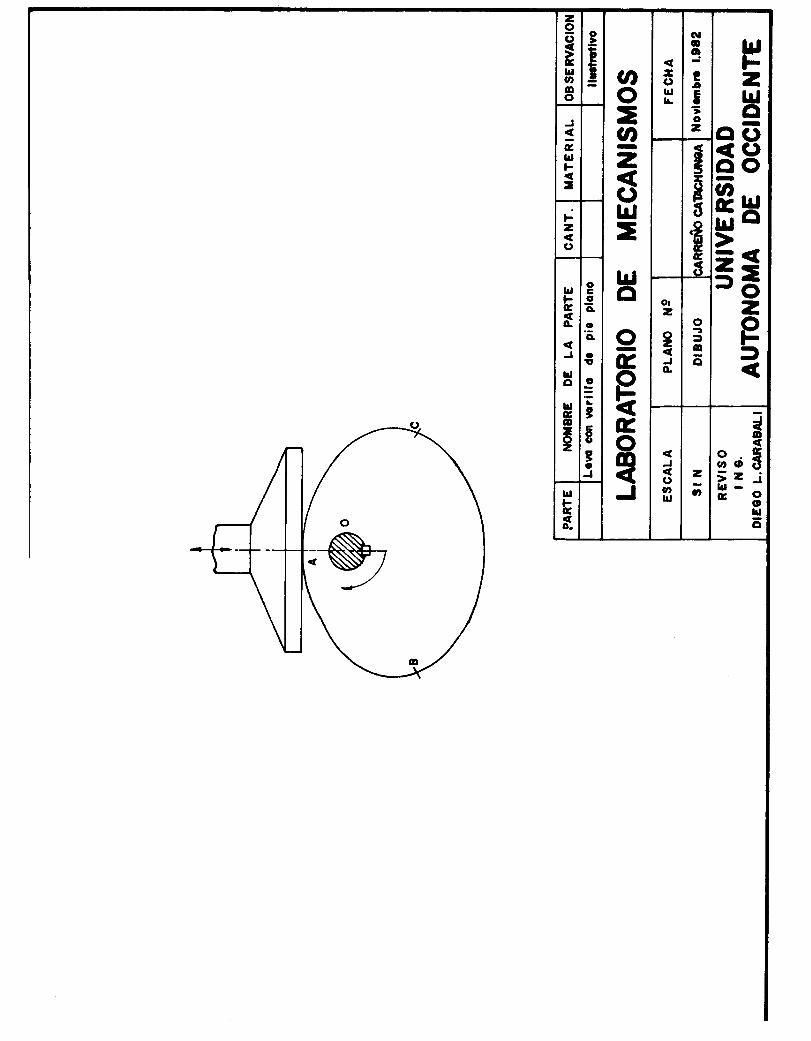
zI(,sÉl¡lo@o
o
Et=
U'o=c2
=()lrl
=l¡lcl
IÉ,pEÉ,ooJ
t()l¡¡lr
G¡oo
ta5to-
tdF-l¡lo-c¡C'<(,ao
E.Ea=<==-o
-P=
3ú,l¡¡FI
ga
H.fiÉ,Gf
É-(,
b,FGo.
ü¡ol¡¡ÉoI9
ocoooA
a!
:LIE(,
BaJ
ot2
o2
o.
o?eoc¡
(,v,l¡¡
zo
coÉ,I(JjooI¡c¡
oooj-¡t-Gl¡¡
FÉÉ

I
N-Y -t ({ñfVi
I
-Iogtl¡¡a@o
ctcat oo
=v,-z(,lrf
=l¡¡oo-É,
PÉ,o€J
aC)lrll¡.
c|oootEaEo2
l¡fFzl¡lct-ct('!t(,::o
Pwtl¡o={=--rOz
PD
sOE
l¡¡FI
ItI8gEt.E
o
€6a,
3s
o-3üÉoorz¡¡E¿t
F-()
l¡lFGf
l¡¡ol¡¡
fr-I
ol-
Io.
o?3foc¡
()ol¡J =o
J6
o.Ísrfo<l-1¡¡-JÉ,O
(au¡o
l¡¡
Eo.

ws[|s
6(,sÉlrlg,oo
0.=ott= oo
=o-z()l¡¡
=lrlc¡
IÉ,IEÉ,ooJ
(,l¡¡lr
Nooa3E!Bz
lúFzl¡¡o-Ilc¡o
< (')ooE-tro=<==-oz
P=
J3É,l¡¡F.
ú3!()
5ot2t||É,É,Í
FzC'
l¡lFÉ,
ñ
J
lrlc¡
u¡c,6tz
o(,!C
o
ctaJ
gl2
o2
d
o.?:6o
JC)at,¡¡
-U'
¡oAÉ,
Ed3>zjH-oo
¡¡c¡
l¡lFE,
É

áF/
//
/ ,rs\ **tt
\ ---')-
\ -/ - v2
;\'ñ'/€T-N-r iI'l | \\ FA
ÉosÉ,l¡¡ooo
!ELtt IQlol=
l3nl=t<lqtl¡l
=lrfcl
oallfrolklE, Iolel5t
€-(tl¡¡lt
No3aIEatt
l|¡F-l¡¡e
c¡C'
É89wEo
=f-ozP=t
ElrlF.
3
Hor2H
fr
F-(,
l¡lFGÉ
¡¡ct
b¡É.Eto-
tEb!¡oLct(,I
ooII¡aL(t
ol-o2J4
o?tEcl
(,(t,lr¡
za,
coo.5g|)(9 (i:= -.¡cB
¡¡a
l¡lFÉ,
Í

NfE(,
Jl!l;l \"( I n/=\MSd\ l+lr ñ)/-i-\( "lmYltrrP )---t-a
t¡¡l
=1z':<l-l
zo(,sGl¡¡aoo
É,l¡¡F<fI
oo=v,I)z(,l¡f-
H
IGpEÉ,ooJ
a(,l¡¡t!
0l2ozJG
JC'U,u¡
6lo3a¡Ea
tr?nEC'
'lG
fr
a-fIo
2o
II l¡fIFl- l¡lc¡oE
<C'go9wñc¡
=Í-o
-PD
il
3' 3j7 :Hggo
o(,
(,
F-(t
l¡¡Fco.
l¡Jolr¡É,o.?
ocaIl¡l
o:oItrat(,
l¡¡
E<fo.

-o,É,l¡¡u,Eo
o.toaa v,o
=9=C)l¡¡
=
l¡fclo-rGokGoof
-o¡¡lr
G|o3a¡E!-
tdF-l¡¡c¡-c¡c)
É8
Es
=f-ozP3
Jsc,l¡¡FI
ú3-(,
Eo
i-
uÉ,f
F2C'
HÉ,
ñ
J
l¡¡c¡
UJEoIo2
ocoC
0|'Ia!ra,o
olzo-JG
o?Doo
(,al¡¡ =.D
fo
.rGñ¿ ú>2 ¡ll- dGO
ogo
HEÉ

á3Él¡¡ooo
EoLO.9É¡ u,o
=LzC'l¡f
=l¡¡oIGIEGo@
J
aC'¡¡IL
G'oo¿OLaEo3-
lr¡F=l¡lc¡-c¡(,
<C'9oU'
frH-<53
=P3
JfE¡¡E.
A-- .e
:lo
, V-.-----
o
i/'l-\EEc | \r:e3' -rPt l;EÉl
\e-l_l__/\ilG#¿l-_-\ I
Eg ETc3e :l
-lal
;!E
{o5Eúo'ñÉÉat
É2(t
¡¡FG,fJlr¡o¡¡G6.o2
T€I(,EtaE
ttt¡ot
Ol2o-J&
o?3gC¡
J(tC'olr¡
-o
3
3¡ 3
¡= d¡¡a
l¡,FGÉ

l¿lFzl¡Jo()L)ol¡Jo
=ozoFf,(:
ó
oaÍEl¡l¿z3
U'o=(n
=()l¡J
=lrfoIIEokfromJ
BBt¿.ogt(,aI¡t
o¡Co
E(,oEaA
;=oJDoo-
o0A
gaa
oLaEo=
0E0c
oE
Ol-
o!ct:C¡

,aEoItEtatso C"o
U'
=()l¡J
=UJooÉ.pkÉ.o(n
J
G|o.o
o-o3|'t5
3.C¡3
a¡.
EC'
a.9!!C'
ortabLc(teIaA
lllFzrdo
ofJ4()do6É, lrll¡J O¿z=)=oz
Pf,
:¡E-
jco(,
.r|c=oJ3oo-
o
oo
Io!
o\cEoz
oC0A
E
o.-
üco!ot3o
¿(to¡¡
E¡oeo(' -9t-- u
E.i!EJ
o0o.
l)+:i(tI

l¡JFz
^ l¡J
=ogof/)c)tro
=H=ozoF=
U'a¿,az()l¡J
=l¡JoIE,IEÉ,om
J
oItG¿3a,ooct
aIo(t
o¡CoLboC'
eItao-
oboo-
o0o
-9
o!
o!Eo-
rtoz,
otoo-
Lo¡
cIot¡c¡