prosiding.seminar.radar.nasional
TRANSCRIPT

8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 1/156
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 2/156
ProsidingSeminar Radar Nasional 2007
SEMINAR RADAR NASIONAL
Prosiding
Gedung Widya Graha LIPIJakarta, 18 – 19 April 2007
PENYELENGGARA :
Pusat Penelitian Elektronika dan TelekomunikasiLembaga Ilmu Pengetahuan Indonesia (PPET-LIPI)danSekolah Teknik Elektro dan Informatika (STEI – ITB) bekerjasama denganInternational Research Centre for Telecommunications andRadar (IRCTR) Delft University of Technology (TU Delft) The Netherlands
Jakarta, 18 – 19 April 2007 ii
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 3/156
ProsidingSeminar Radar Nasional 2007
ProsidingSeminar Radar Nasional 2007
ISBN : 9-793-68869-6
Hak cipta © 2007 oleh Pusat Penelitian Elektronika dan Telekomunikasi – LIPI
Hak cipta dilindungi undang-undang. Dilarang menyalin, memproduksi dalam segala bentuk, termasukmem-fotocopy, merekam, atau menyimpan informasi, sebagian atau seluruh isi dari buku ini tanpa ijintertulis dari penerbit.
Prosiding Seminar Radar Nasional / [editor by] Goib Wiranto, Mashury Wahab, A.A. Lestari, A.B. Suksmono, Rustini S. Kayatmo, Purwoko Adhi.vi + pp.; 21,0 x 29,7 cmISBN : 9-793-68869-6Radio Detecting and Ranging (Radar)
Technical editing by Yusuf Nur Wijayanto, Dadin Mahmudin, and Yudi Yulius Maulana.Cover design by Yadi Radiansah.
Diterbitkan oleh :
Pusat Penelitian Elektronika dan Telekomunikasi (PPET)Lembaga Ilmu Pengetahuan Indonesia (LIPI)Kampus LIPI Jl. Sangkuriang, BandungTelp. (022) 2504661 Fax. (022) 2504659
Website : www.ppet.lipi.go.id
Jakarta, 18 – 19 April 2007 iii
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 4/156
ProsidingSeminar Radar Nasional 2007
Pelindung
Deputi Ilmu Pengetahuan Teknik LIPI
Ketua Umum
Yuyu Wahyu
Panitia Pengarah
Lilik Hendradjaja, Dephan Adang Suwandi, ITBMasbah RT Siregar, LIPI
Tatang A. Taufik, BPPTHiskia Sirait, LIPI Andriyan B Suksmono, ITB A Andaya Lestari,IRCTR-IB
Endon Bharata, IRCTR-IBNana Rachmana, ITBMashury Wahab, LIPI
Syamsu Ismail, LIPIRustini S Kayatmo, LIPIPurwoko Adhi, LIPIEko Tjipto Rahardjo, UI
Panitia Pelaksana
Ridwan Effendi, ITB Andi Kirana, RCSGunawan Handayani, ITBPamungkas Daud, LIPIFredrika H K, LIPIIip Syarif Hidayat, LIPIDeni Permana K, LIPISri Hardiati, LIPIYudi Yulius Maulana, LIPIDadin Mahmudi, LIPI
Iqbal Syamsu, LIPIYusuf Nur Wijayanto, LIPIFolin Oktafiani, LIPISulistyaningsih, LIPIDedi, LIPIYadi Radiansah, LIPIZaenul Arifin, LIPIPopi Sumarni, LIPILisdiani, LIPIEndang Ridwan, LIPI
Jakarta, 18 – 19 April 2007 iv
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 5/156
ProsidingSeminar Radar Nasional 2007
KATA PENGANTAR
Ungkap syukur kami panjatkan ke hadirat Allah SWT yang telah melimpahkan rahmat dan karunianyasehingga Seminar Radar Nasional pada tanggal 18 – 19 April 2007 ini dapat terselenggara.
Selanjutnya kami mengucapkan selamat datang di kota Jakarta kepada para peserta seminar, pembicarakunci, pemakalah poster dan para undangan lainnya. Adapun maksud dan tujuan diadakannya seminar iniadalah menjadi sarana sosialisasi dan forum pertukaran informasi antara para pakar, peneliti danpengguna Radar, sehingga di akhir seminar ini diharapkan akan dapat dibentuk suatu wadah AsosiasiRadar Indonesia (ASRI) atau Ikatan Ahli Radar Indonesia (IARI) yang akan membantu pemerintah dalampermasalahan Radar di Indonesia. Suatu hal yang tidak mustahil bila teknologi, kebijakan dan pemecahanmasalah tentang Radar akan terungkap dalam seminar ini.
Seminar ini menghadirkan pembicara tamu dari pengarah/pembuat kebijakan dalam bidang Radar.
Akhirnya panitia mengucapkan terimakasih yang sebesar besarnya kepada Deputi IPT – LIPI, pembicaraundangan, peserta dan semua pihak yang telah membantu hingga terselenggaranya acara ini.
”Selamat dan sampai jumpa di seminar – seminar berikutnya”
Jakarta, 19 April 2007
Panitia
Jakarta, 18 – 19 April 2007 v
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 6/156
ProsidingSeminar Radar Nasional 2007
Daftar Isi
Susunan Panitia ................................................................................................................. iv
Kata Pengantar ................................................................................................................... v
Daftar Isi ............................................................................................................................ vi
Daftar Makalah ................................................................................................................ vii
Jakarta, 18 – 19 April 2007 vi

8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 7/156
ProsidingSeminar Radar Nasional 2007
Daftar Makalah
1. Pengunaan UAIS dan Radar Pengawas Pantai Untuk Monitoring Wilayah Perairan
Indonesia ......................................................................................................................................... 1
Mashury Wahab
2. Pengaturan Footprint Pada GPR Dengan Modified Dipole Array ....................................... 8
A Adya Pramudita, A Kurniawan, A Bayu Suksmono, A Andaya Lestari
3. Pembuatan Voltage Controlled Oscilator untuk Perangkat Pemancar Jamming ............... 14
Elan Djaelani, Daday Ruhiat
4. Frequency Modulation Continuous Wave (FM-CW) Radar .................................................21
Rustini Soemaryato Kayatmo
5. Potensi Electromagnetic Interference (EMI) dari Pancaran Sinyal Radar Spurious........... 26
Sri Hardiati
6. Perancangan Antena Mikrostrip Linear Tapered Slot Bentuk V dengan Pencatu CPW
untuk Aplikasi Radar .................................................................................................................... 31
Fitri Yuli Zulkifli, Bayu Aji, Eko Tjipto Rahardjo
7. Pendekatan Citra Radar menggunakan Parameter Time Return dan Power Return ........ 35
Yusuf Nur Wijayanto
8. Ganesha Avionics Air Traffic Control System, Pemanfaatan RADAR dalam Bidang
Pemanduan Lalu Lintas Udara Penerbangan Sipil .................................................................... 40
Oon Arfiandwi Martyono, Riza Satria Perdana
9. A Novel Ultra Wide Band (UWB) Antenna for Monostatic Microwave Radar (MMR) ..... 46 Rudy Yuwono
10. Prinsip-Prinsip Dasar dan Pertimbangan Desain dari Radar Penembus Permukaan
dengan Teknik Sintesa Frekuensi (SFCW-GPR) ........................................................................ 51
Andriyan B. Suksmono, Adya Pramudita, Endon Bharata, A. Andaya Lestari, Nana Rachmana
11. Pemrosesan Sinyal untuk Data A-Scan GPR .........................................................................58
Deni Yulian, A. Andaya Lestari
12. Pengukuran Late - Time - Ringing Antenna Menggunakan Sistem impulse GPR ......... 63Liarto, A.A. Lestari, E. Bharata
13. Beberapa Fitur pilihan pada Search-Radar yang diperlukan untuk peningkatan
Efektifitas Operasi Radar dalam Aplikasi Pesawat Patroli Maritim........................................ 67
Heri Eka Permana
14. State Feedback Robust Tracking Controller Based on Preview - Control Approach
(Teori).............................................................................................................................................. 74
Estiko Rijanto
15. Design of Radar Antenna Tracking Servo Using State Feedback Robust Tracking
Controller Based on Preview - Control Approach (Aplikasi) ................................................... 80Estiko Rijanto
Jakarta, 18 – 19 April 2007 vii
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 8/156
ProsidingSeminar Radar Nasional 2007
16. Perancangan dan Realisasi Antena Wire Dipole Pengukur Dielektrik Tanah
Menggunakan Metode FDTD 3D ..................................................................................................86
Yuyu Wahyu, Andik Setiawan, Folin Oktafiani, A.A Lestari
17. Shaking Mechanism Dynamics for Micro-strip Array Antenna Used in Surveillance
Coastal Radars ...............................................................................................................................93
Edwar Yazid, Estiko Rijanto
18. Perhitungan Faktor Reflektivitas Radar dan Intensitas Hujan dari Pengukuran
Distribusi Ukuran Titik Hujan di Surabaya ............................................................................... 99
Lince Markis, Gamantyo Hendrantoro, Achmad Mauludiyanto
19. Pengukuran Variasi Temporal Curah Hujan di Surabaya dengan Disdrometer Optic 103
Muriani, Gamantyo Hendrantoro, Achmad Mauludiyanto
20. Analisa dan Simulasi Traffic Monitoring Kendaraan Bermotor menggunakan
Bistatic Radar ............................................................................................................................... 107Pamungkas Daud, R Nurmansyah Yarnaka, Heroe Wijanto
21. Fasilitas Pengujian Antena GPR di ITB .............................................................................. 116
E. Bharata1, A.A. Lestari1, A.B. Suksmono, T.P. Soetikno D. Yulian, Liarto, A.G. Yarovoy, dan L.P.Ligthart
22. Perancangan dan Implementasi Antena Monopole 1GHz untuk Aplikasi Borehole
GPR ............................................................................................................................................... 121
Nana Rachmana, M.Nuramzan Iftari, Andriyan B Suksmono
23. Karakteristik Curah Hujan di Kotaagang menggunakan Radar Atmosfer
Katulistiwa .................................................................................................................................... 126Suaydhi
24. Model Antena Pita Lebar Perbahan Limbah dan Uji Hipotesa Antena ........................... 132
Soetamso
25. Peranan Radar Surveillance (PSR/SSR) dalam Pelayanan Lalu Lintas Udara di
Indonesia dan ADS-B sebagai Sistem Alternatif ...................................................................... 139
Abdullah Agus Ma’rufi, Moch. Abdul Azis
Jakarta, 18 – 19 April 2007 viii

8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 9/156
Prosiding
Seminar Radar Nasional 2007
Penggunaan UAIS dan Radar Pengawas Pantai
untuk Monitoring Wilayah Perairan Indonesia
Mashury WahabPusat Penelitian Elektronika dan Telekomunikasi (PPET) – LIPI
Jl. Cisitu 21/154D Bandung, 40135, IndonesiaPhone: 022- 2504661, Fax: 022- 2504659, Email: [email protected]
Abstract
Application of a UAIS and coastal surveillance Radar system to monitor Indonesian waters and also to improvethe safety on sea is described in this paper. Integration of the UAIS systems with Radar systems in a networkwill increase the number of Indonesian waters that can be covered and safety guidance can be received by alarger number of ships. Accidents at the harbor can be minimized due to the traffic of incoming and outgoing
vessels. Securing Indonesian waters against foreign infiltration can be improved by using this UAIS and Radar system. The ongoing research and development of the coastal surveillance Radar at the research centre for
electronics and telecommunications (PPET-LIPI) including its milestones is also presented in this paper.
Keywords: UAIS, coastal surveillance Radar, network, ships, safety and milestones.
Abstrak
Dalam tulisan ini dipaparkan tentang aplikasi UAIS dan Radar pengawas pantai yang dapat digunakan untukmemonitor wilayah perairan Indonesia dan juga untuk meningkatkan keselamatan pelayaran. Integrasi sistemUAIS bersama Radar dalam suatu jaringan memungkinkan banyak wilayah perairan yang dapat dicakup serta
panduan keselamatan pelayaran akan dapat diterima oleh banyak kapal. Kecelakaan dipelabuhan akibat kapalkeluar masuk dapat dihindari. Pengamanan wilayah perairan Indonesia terhadap penyusupan asing dapatdikurangi dengan menggunakan system UAIS dan Radar ini. Penelitian dan pengembangan Radar pengawas pantai yang sedang berlangsung di pusat penelitian elektronika dan telekomunikasi (PPET-LIPI) jugadipresentasikan dalam tulisan ini termasuk langkah-langkah pencapaiannya (milestone).
Kata Kunci : UAIS, Radar pengawas pantai, jaringan, kapal-kapal, keselamatan, dan pencapaian.
I. Pendahuluan
A. Universal Automatic Identification System(UAIS)UAIS (Universal Automatic Identification
System) adalah sistem transponder pemancardiatas kapal yang beroperasi dalam pita VHFuntuk maritim [4]. Sistem ini mampu untuksecara otomatis mengirimkan informasi kapalseperti identifikasi, posisi, tujuan, panjang dan
jenis kapal serta informasi keselamatan lainnya.Informasi ini disampaikan ke kapal-kapallainnya dan juga ke stasiun pengamatan ditepi pantai. Transponder AIS juga memungkinkan pesan pendek keselamatan navigasi untukdikirimkan ke kapal tertentu atau ke semuakapal disekitar kapal yang mengirimkan pesan.Jangkauan transmisi efektif dari transponderUAIS akan tergantung daya transmisi dantinggi antena. Secara umum, jangkauan inisekurang-kurangnya 20 mil laut (36 Km).
Istilah Universal digunakan karena sistemUAIS mempunyai standar internasional untukmenjamin kompatibilitas antar kapal apabila
kapal-kapal tersebut bertemu dan jugakompatibilitas komunikasi antar kapal-stasiundipantai-kapal. Pada saat komunikasi antarkapal, informasi navigasi tambahan akanmemungkinkan petugas kapal untuk meng-identifikasi dan melacak kapal sertamemberikan informasi kunci dalam rangkamenghindari tabrakan. Kapal-kapal yangdilengkapi UAIS akan lebih mudah dideteksi pada saat cuaca buruk dan ombak tinggi
dilautan.Pada saat berhubungan dengan stasiun
dipantai, kapal-kapal tidak perlu lagi untuk berkomunikasi lisan dengan stasiun karena peralatan AIS akan melakukannya secaraotomatis. Lalulintas komunikasi radio menjadi berkurang dan Petugas distasiun tidak perlusetiap waktu memanggil kapal-kapal untukmelapor. Tetapi, Petugas tetap selalu dapatmemonitor keberadaan kapal.
Aplikasi lain dari UAIS adalah:
• Transmisi pesan pendek ke kapaltertentu berkenaan dengan bahaya
Jakarta, 18 – 19 April 2007 1
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 10/156
Prosiding
Seminar Radar Nasional 2007
navigasi, manajemen lalulintas dan pelabuhan.
• AIS dengan bantuan alat lain jugadapat mengirimkan data lingkunganreal-time tentang ombak, arus dan jarak
pandang.• Transmisi data Radar.
• Membantu dalam pencarian kapal yaituuntuk kepentingan SAR ( search and
rescue).
International Maritime Organization (IMO)sesuai dengan mottonya ‘perjalanan laut yangaman dan laut yang bersih’ telah menyetujuistandar unjuk kerja AIS pada tahun 1997 yangdiajukan oleh negara-negara skandinavia danEropa barat [4]. IMO menentukan semua kapal
baru harus dilengkapi UAIS sejak 1 Juli 2002dan pada Juli 2008 semua kapal harus sudahmemiliki perangkat UAIS [4].
B. Radar Pengawas PantaiPengamanan dan pengawasan wilayah
NKRI yang terdiri dari lebih 17.000 pulaudengan 2/3 wilayah terdiri dari lautanmemerlukan aparat dan peralatan yang berjumlah sangat besar. Pada kenyataannya,kemampuan TNI-AL dan Polri untukmengawasi wilayah RI sangat terbatas sehingga
wilayah perairan Indonesia rawan akan pencurian ikan, pelanggaran wilayah olehkapal-kapal asing, pembajakan kapal laut dan penyelundupan.
Salah satu cara untuk meningkatkankemampuan aparat pemerintah dalammengawasi dan mengamankan wilayah adalahdengan menggunakan Radar pengawas pantaiuntuk mengawasi pergerakan kapal lautsehingga dapat dicegah tindakan-tindakan yangdapat merugikan NKRI dan juga tabrakan kapal
apabila hendak merapat ke pelabuhan.Pemasangan Radar pengawas pantai dengandaya besar (high power ) di kapal atau dipinggirdaratan (sekitar pantai) dapat digunakan untukmengawasi wilayah laut yang luas sampai beberapa puluh mil laut atau sampai wilayahzona ekonomi eksklusif (ZEE).
Selain untuk mengawasi wilayah perairanIndonesia, Radar juga berperan sangat pentingdalam mengatur lalulintas transportasi laut.Kapal-kapal yang masuk dan keluar pelabuhandapat diatur sehingga terhindar dari tabrakan
terutama pada saat cuaca buruk. PenggunaanRadar pantai (dengan alat UAIS)
memungkinkan wilayah perairan Indonesiadapat dimonitor sepanjang waktu sehinggatindakan illegal seperti pencurian ikan, perompakan, penyelundupan dapat segeradilakukan antisipasi.
Pengamanan wilayah Indonesia termasuk pulau-pulau terluar/terdepan akan sangatterbantu dengan adanya Radar pantai. Hal inididukung oleh fakta-fakta berikut [1, 2]:
Wilayah Indonesia terdiri dari lebih 17ribu pulau dan 2/3 diantaranya berupalautan.
Jarak dari Sabang di NAD ke Jayapuradi Papua +/- 3 ribu mil laut (5.556 km).
Jumlah Kapal TNI-AL 117 buah dan77 kapal diantaranya berusia 21-60tahun.
Perbandingan jumlah kapal terhadapluas wilayah perairan: 1:72 ribu km persegi.
Dibutuhkan sekitar 350 kapal patroliuntuk seluruh wilayah perairan.
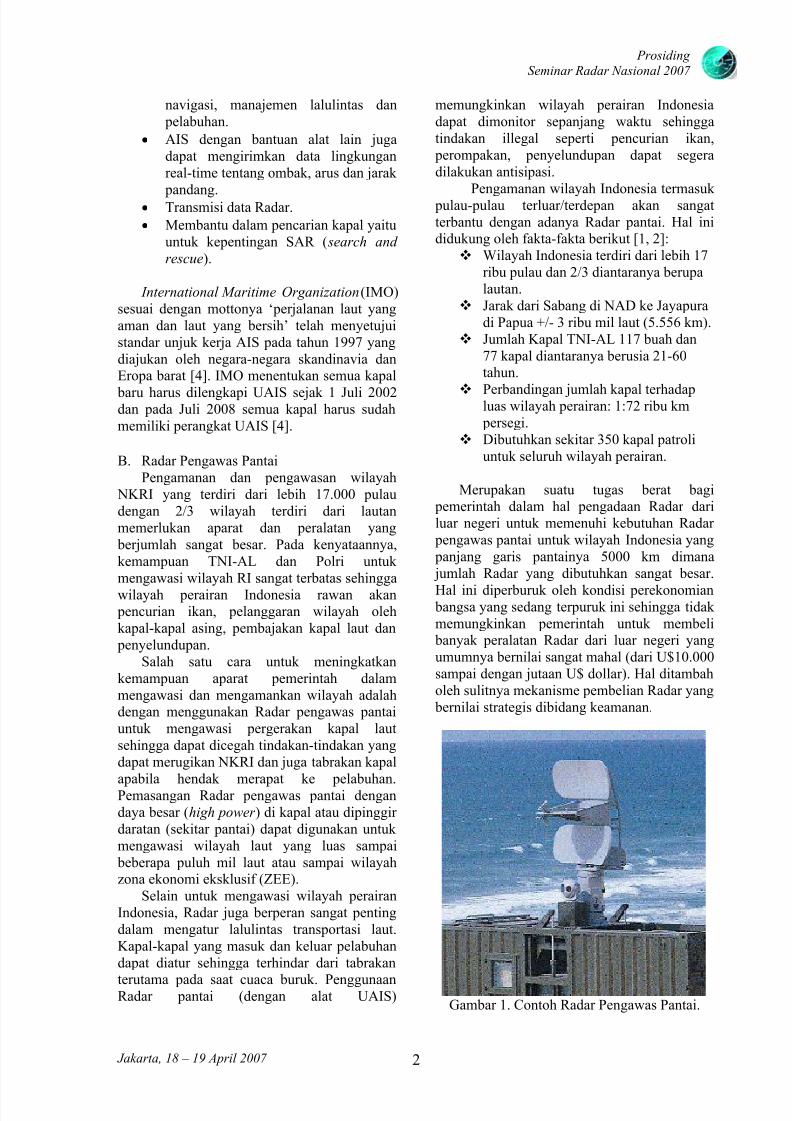
Merupakan suatu tugas berat bagi pemerintah dalam hal pengadaan Radar dariluar negeri untuk memenuhi kebutuhan Radar pengawas pantai untuk wilayah Indonesia yang panjang garis pantainya 5000 km dimana jumlah Radar yang dibutuhkan sangat besar.
Hal ini diperburuk oleh kondisi perekonomian bangsa yang sedang terpuruk ini sehingga tidakmemungkinkan pemerintah untuk membeli banyak peralatan Radar dari luar negeri yangumumnya bernilai sangat mahal (dari U$10.000sampai dengan jutaan U$ dollar). Hal ditambaholeh sulitnya mekanisme pembelian Radar yang bernilai strategis dibidang keamanan.
Gambar 1. Contoh Radar Pengawas Pantai.
Jakarta, 18 – 19 April 2007 2
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 11/156
Prosiding
Seminar Radar Nasional 2007
Gambar 3 memperlihatkan daerah jangkauan Radar pantai apabila dilakukaninstalasi Radar pantai diseluruh Indonesia.Daerah jangkauan ini ditentukan oleh daya pancar, penguatan antena, polarisasi antena danlebar berkas (beamwidth).
Setiap Radar pantai dilengkapi alat UAISuntuk kemudahan identifikasi kapal-kapal yangdimonitor. Kemudian, semua Radar pantaidihubungkan oleh suatu network (jaringan)sehingga bisa terintegrasi. Dikarenakan kondisiIndonesia yang terdiri dari kepulauan, makakomunikasi antara Radar pantai satu denganlainnya dan juga dengan stasiun pusatdilaksanakan melalui satelit sehingga bisa lebihandal.
II. Sistem UAIS
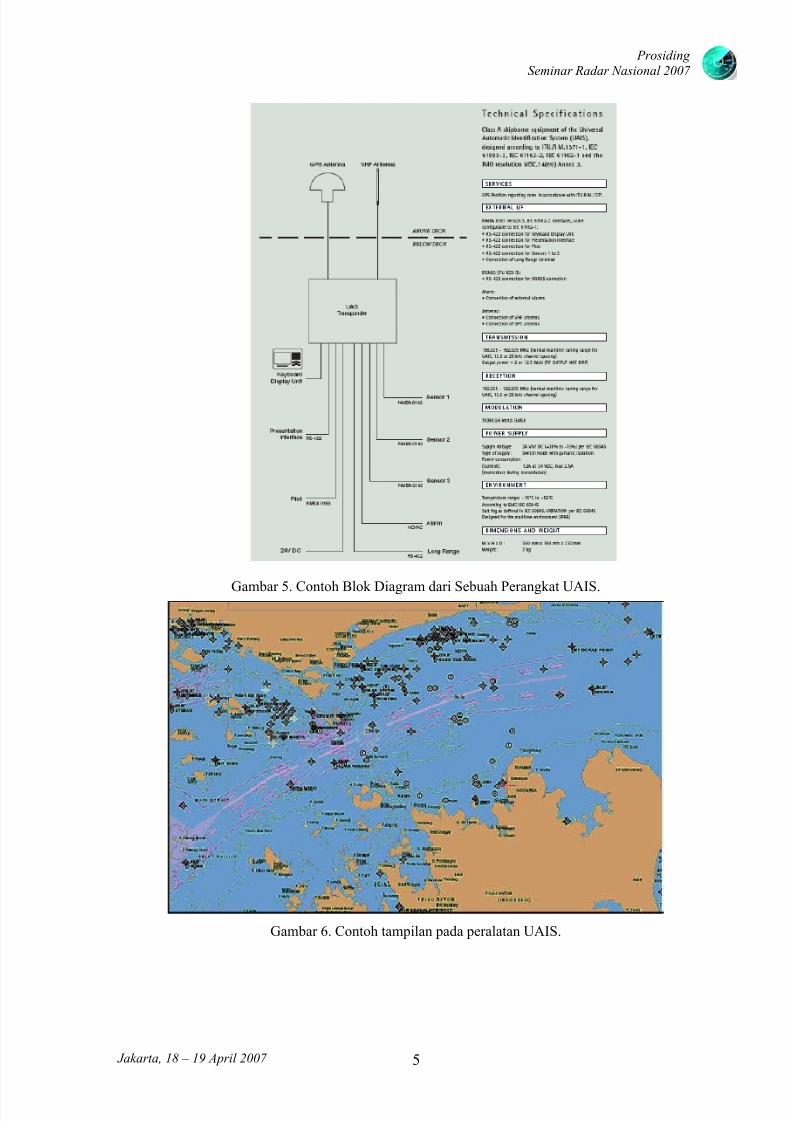
Dalam gambar 4, diperlihatkan suatuskenario lalu lintas laut dimana ada tiga kapalyang saling berhubungan satu sama lainmelalui peralatan UAIS mereka. Kapal-kapaltersebut juga berhubungan dengan stasiun-stasiun (yang memiliki Radar pantaididalamnya) yang ada dipulau-pulau yangdilewati serta dengan sebuah anjungan minyaklepas pantai. Melalui komunikasi ini, kapal-kapal dapat terhindar dari tabrakan dan dapat
mengenali satu sama lain. Informasi navigasitermasuk cuaca juga diterima kapal-kapal untukmembantu kelancaran perjalanan. Stasiun-stasiun dipulau-pulau yang dilewati turutmemandu dan memonitor kapal-kapal termasukkapal-kapal yang akan berlabuh.
International Telecommunication Union (ITU) telah menentukan dua alokasi kanal VHFuntuk UAIS yaitu pada frekuensi 161.975MHzdan 162.025MHz. Standar teknis untuk UAISdisetujui oleh ITU pada November 1998.Kriteria teknis yang ditentukan antara lain:
Karakteristik Transceiver Modulasi Format data, pesan dan kemasan TDMA (time division multiple access) Manajemen Kanal
Contoh spesifikasi minimum untuk UAISdiperlihatkan pada Tabel 1 [5].
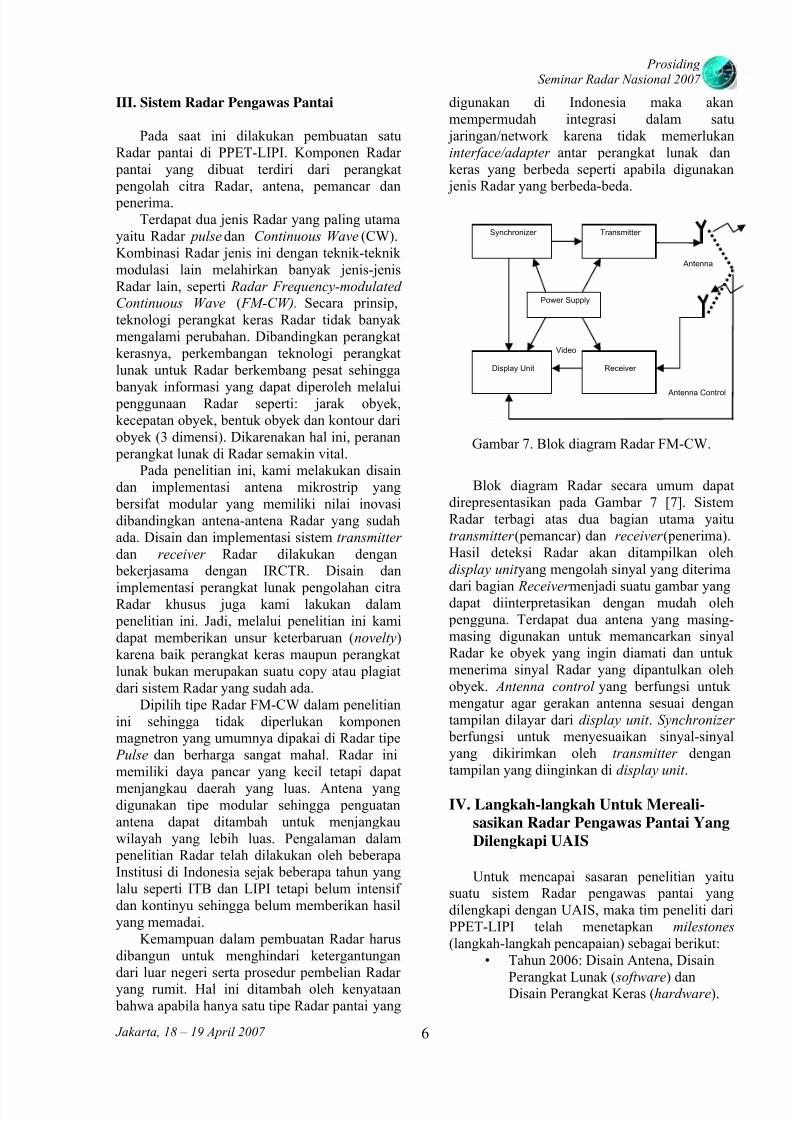
Dalam gambar 5 [6], diperlihatkansebuah blok diagram sistem UAIS yangterhubung dengan sumber daya, antena, dan
bermacam-macam peralatan/sensor dikapaltermasuk sistem navigasi terintegrasi. Pada saat
instalasi, informasi statis yang berhubungandengan kapal harus dimasukkan ke memori alatUAIS antara lain identitas, panjang, jenis kapal,dan lokasi antena. Unit akan dilengkapiminimal dengan keyboard dan display yang berfungsi untuk mengetahui status informasialat dan target.
Pada saat dalam perjalanan, peralatanUAIS akan memancarkan secara kontinyu danautomatis posisi dari kapal serta semuainformasi statis dan dinamis sesuai denganstandar IMO. Operator harus memasukkan datayang berhubungan dengan perjalanan, antaralain:
• Ketinggian kapal dibawah air• Jenis kargo berbahaya yang dibawa• Tujuan dan perkiraan sampai
• Rute yang digunakan• Status navigasi sesungguhnya
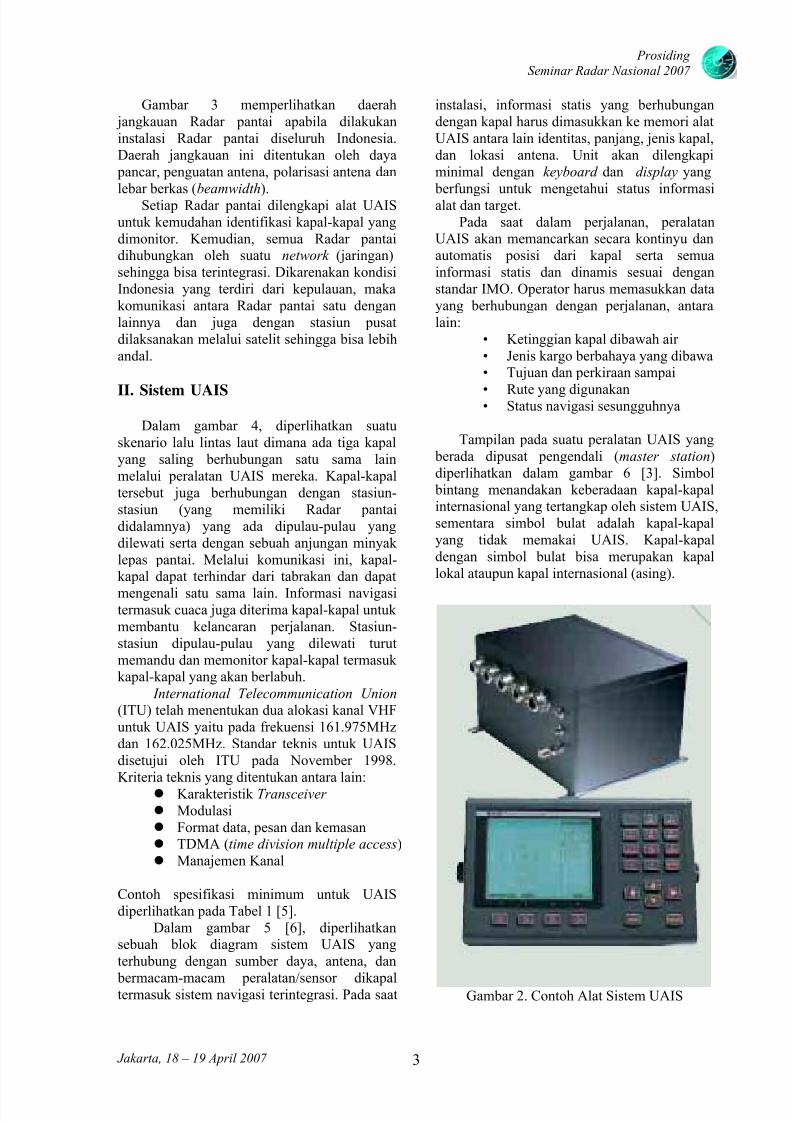
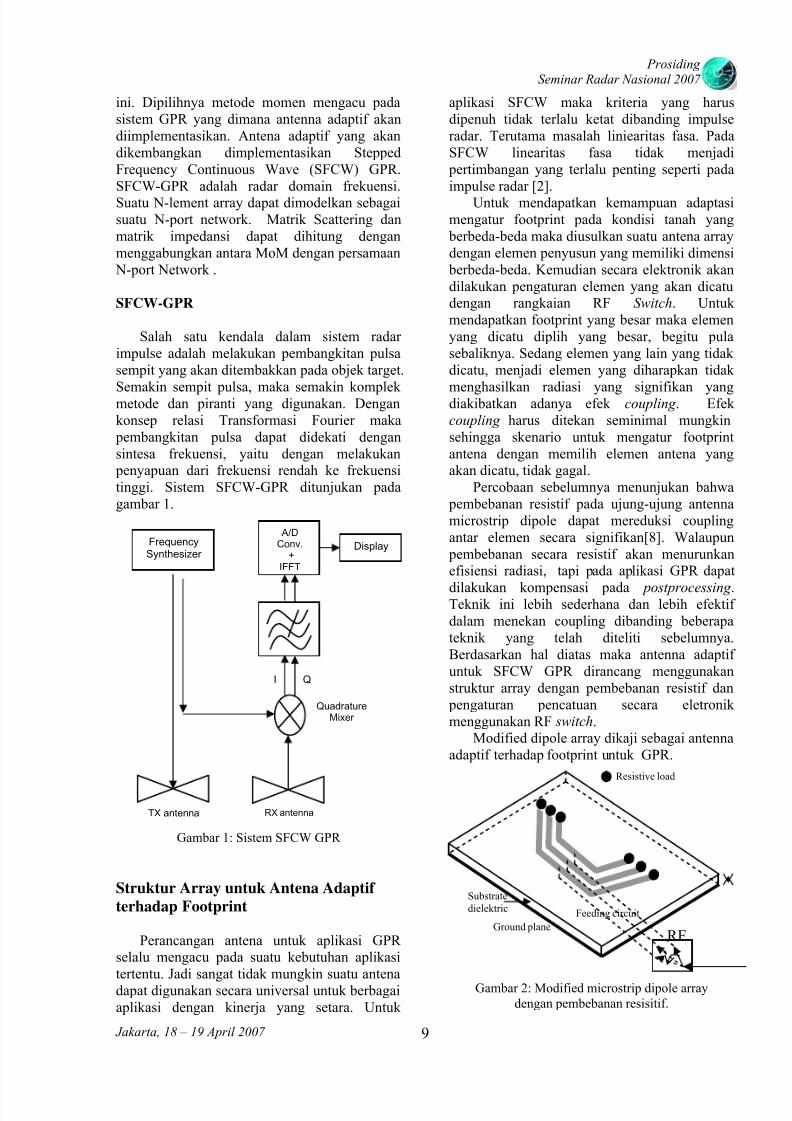
Tampilan pada suatu peralatan UAIS yang berada dipusat pengendali (master station)diperlihatkan dalam gambar 6 [3]. Simbol bintang menandakan keberadaan kapal-kapalinternasional yang tertangkap oleh sistem UAIS,sementara simbol bulat adalah kapal-kapalyang tidak memakai UAIS. Kapal-kapaldengan simbol bulat bisa merupakan kapallokal ataupun kapal internasional (asing).
Gambar 2. Contoh Alat Sistem UAIS
Jakarta, 18 – 19 April 2007 3
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 12/156
Prosiding
Seminar Radar Nasional 2007
Gambar 3. Illustrasi jangkauan deteksi Radar di seluruh wilayah Indonesia.
Gambar 4. Contoh konfigurasi sistem UAIS.
Pulau
PulauKapal 3
AnjunganMinyak LepasPantai
Stasiun 2Kapal 2
PulauStasiun 1
Kapal 1
Pulau
Tabel 1. Spesifikasi Sistem UAIS.
Jakarta, 18 – 19 April 2007 4
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 13/156
Prosiding
Seminar Radar Nasional 2007
Gambar 5. Contoh Blok Diagram dari Sebuah Perangkat UAIS.
Gambar 6. Contoh tampilan pada peralatan UAIS.
Jakarta, 18 – 19 April 2007 5
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 14/156
ProsidingSeminar Radar Nasional 2007
III. Sistem Radar Pengawas Pantai
Pada saat ini dilakukan pembuatan satuRadar pantai di PPET-LIPI. Komponen Radar pantai yang dibuat terdiri dari perangkat pengolah citra Radar, antena, pemancar dan penerima.
Terdapat dua jenis Radar yang paling utamayaitu Radar pulse dan Continuous Wave (CW).Kombinasi Radar jenis ini dengan teknik-teknikmodulasi lain melahirkan banyak jenis-jenisRadar lain, seperti Radar Frequency-modulated
Continuous Wave ( FM-CW). Secara prinsip,teknologi perangkat keras Radar tidak banyakmengalami perubahan. Dibandingkan perangkatkerasnya, perkembangan teknologi perangkatlunak untuk Radar berkembang pesat sehingga
banyak informasi yang dapat diperoleh melalui penggunaan Radar seperti: jarak obyek,kecepatan obyek, bentuk obyek dan kontour dariobyek (3 dimensi). Dikarenakan hal ini, peranan perangkat lunak di Radar semakin vital.
Pada penelitian ini, kami melakukan disaindan implementasi antena mikrostrip yang bersifat modular yang memiliki nilai inovasidibandingkan antena-antena Radar yang sudahada. Disain dan implementasi sistem transmitter dan receiver Radar dilakukan dengan bekerjasama dengan IRCTR. Disain dan
implementasi perangkat lunak pengolahan citraRadar khusus juga kami lakukan dalam penelitian ini. Jadi, melalui penelitian ini kamidapat memberikan unsur keterbaruan (novelty)karena baik perangkat keras maupun perangkatlunak bukan merupakan suatu copy atau plagiatdari sistem Radar yang sudah ada.
Dipilih tipe Radar FM-CW dalam penelitianini sehingga tidak diperlukan komponenmagnetron yang umumnya dipakai di Radar tipe
Pulse dan berharga sangat mahal. Radar inimemiliki daya pancar yang kecil tetapi dapat
menjangkau daerah yang luas. Antena yangdigunakan tipe modular sehingga penguatanantena dapat ditambah untuk menjangkauwilayah yang lebih luas. Pengalaman dalam penelitian Radar telah dilakukan oleh beberapaInstitusi di Indonesia sejak beberapa tahun yanglalu seperti ITB dan LIPI tetapi belum intensifdan kontinyu sehingga belum memberikan hasilyang memadai.
Kemampuan dalam pembuatan Radar harusdibangun untuk menghindari ketergantungandari luar negeri serta prosedur pembelian Radaryang rumit. Hal ini ditambah oleh kenyataan bahwa apabila hanya satu tipe Radar pantai yang
digunakan di Indonesia maka akanmempermudah integrasi dalam satu jaringan/network karena tidak memerlukaninterface/adapter antar perangkat lunak dankeras yang berbeda seperti apabila digunakan jenis Radar yang berbeda-beda.
Gambar 7. Blok diagram Radar FM-CW.
Blok diagram Radar secara umum dapatdirepresentasikan pada Gambar 7 [7]. SistemRadar terbagi atas dua bagian utama yaitutransmitter (pemancar) dan receiver (penerima).Hasil deteksi Radar akan ditampilkan olehdisplay unit yang mengolah sinyal yang diterima
dari bagian Receiver menjadi suatu gambar yangdapat diinterpretasikan dengan mudah oleh pengguna. Terdapat dua antena yang masing-masing digunakan untuk memancarkan sinyalRadar ke obyek yang ingin diamati dan untukmenerima sinyal Radar yang dipantulkan olehobyek. Antenna control yang berfungsi untukmengatur agar gerakan antenna sesuai dengantampilan dilayar dari display unit . Synchronizer berfungsi untuk menyesuaikan sinyal-sinyalyang dikirimkan oleh transmitter dengantampilan yang diinginkan di display unit .
IV. Langkah-langkah Untuk Mereali-
sasikan Radar Pengawas Pantai Yang
Dilengkapi UAIS
Untuk mencapai sasaran penelitian yaitusuatu sistem Radar pengawas pantai yangdilengkapi dengan UAIS, maka tim peneliti dariPPET-LIPI telah menetapkan milestones (langkah-langkah pencapaian) sebagai berikut:
• Tahun 2006: Disain Antena, Disain
Perangkat Lunak ( software) danDisain Perangkat Keras (hardware).
Synchronizer Transmitter
Display Unit Receiver
Power Supply
Antenna Control
Video
Antenna
Jakarta, 18 – 19 April 2007 6

8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 15/156
ProsidingSeminar Radar Nasional 2007
• Tahun 2007: Implementasi Antena,Perangkat Lunak dan Keras.
• Tahun 2008: Integrasi seluruh bagiansistem dan juga dengan peralatanUAIS, Testing dan Kalibrasi.
• Setelah tahun 2008, akan dilakukan pengembangan Radar pengawas pantai kedalam satu jaringan/network.
V. Hasil dan Pembahasan
Dalam tulisan ini telah dipresentasikantentang sistem UAIS dan Radar serta integrasiantara kedua sistem ini. Sistem Radar yangdilengkapi oleh UAIS sangat membantu untukmengatur lalu lintas laut diwilayah Indonesiaserta meningkatkan keselamatan pelayaranterlebih lagi pada saat cuaca buruk. Pengawasan
wilayah Indonesia juga dapat dilakukansepanjang waktu tanpa mengeluarkan ongkos besar untuk patroli kapal. Apabila ada tindakanillegal diwilayah perairan Indonesia, aparat yang berwenang dapat segera bertindak.
Spesifikasi dan blok diagram sistem UAISserta blok diagram sistem Radar juga telahdipresentasikan. Langkah-langkah pencapaiansasaran dalam penelitian berkelanjutan ini jugatelah disampaikan.
VI. Kesimpulan
Sistem UAIS dan Radar yang terintegrasiuntuk meningkatkan keselamatan pelayarandilaut dan pengawasan perairan Indonesia telahdipresentasikan dalam tulisan ini. PenggunaanRadar pengawas pantai akan sangat membantuaparat yang berwenang untuk mencegah
tindakan illegal termasuk penyusupan kapalasing di perairan Indonesia. Pembuatan jaringanRadar akan sangat membantu pengawasanwilayah Indonesia secara menyeluruh.Kemandirian bangsa dalam pembuatan Radarharus dibangun untuk menghindariketergantungan terus menerus dari pihak luarnegeri.
VII. Daftar Pustaka
[1] Harian Kompas, ’ Indonesia ButuhRatusan Kapal Patroli Laut’, 11September 2003.
[2] Poedjo Purnomo,’ Menjaga Laut SungguhTidak Mudah’, Harian Kompas, 4 Nopember 2004.
[3] Haemiwan Fathony, ’ Pemanfaatan ICTUntuk Mengamankan Selat Malaka’,Detikinet, 13 September 2005.
[4] IALA/AISM, ’ IALA Guidelines on theUniversal Automatic IdentificationSystem (AIS),’ Volume 1, Part 1-Operational Issues, Edition 1.1, December2002.
[5] OFCOM, ‘ UK Interface Requirement2025’, Version 2.0, July 2005.
[6] SAILOR, ’SAILOR UAIS 1900’, Product brochure dan diakses dari www.sailor.dk .
[7] Leo P. Ligthart, ’Short Course on RadarTechnologies’, International ResearchCentre for Telecommunications-transmission and Radar, TU Delft,September 2005.
Jakarta, 18 – 19 April 2007 7

8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 16/156
ProsidingSeminar Radar Nasional 2007
Pengaturan Footprint pada GPR dengan Modified Dipole Array
1,2)A. Adya Pramudita, 1)A. Kurniawan, 1)A. Bayu Suksmono, 1)A.Andaya Lestari1) International Research Centre for Telecommunications and Radar – Indonesian Branch (IRCTR-IB)
STEI - ITB, Jl. Ganesha 10 Bandung 40132, Indonesia ,Phone: +62-22-2501661, +62-22-25341342)Unika Atmajaya Jakarta Indonesia , [email protected]
Abstrak
Footprint antena merupakan parameter penting untuk mendapatkan hasil deteksi yang bagus dalam surveyGPR. Kondisi tanah yang berbeda-beda, yang menutupi objek akan mempengaruhi ukuran footprint antenna sehingga diperlukan antenna yang memiliki kemampuan adaptasi terhadap kondisi tanah yang berbeda-beda. Antena tersebut harus mampu menjaga agar footprint relatif konstan pada kondisi tanah yang berbeda-beda. Footprint antena berhubungan dengan dimensi dari antena. Pada paper ini, Modified dipole array diusulkan sebagai antenna adaptif terhadap footprint untuk aplikasi GPR. Dengan menggunakan RF switch circuit, makaelemen pada array yang akan dicatu dapat dipilih bersesuaian dengan footprint yang akan dihasilkan. Jika
coupling antar elemen pada array begitu signifikan maka skenario adaptasi tersebut akan gagal. Pembebananresistif digunakan untuk menekan level coupling antar elemen array.
Kata kunci : Footprint, Antena Adaptif, Modified Dipole, Coupling, Pembebanan Resistif.
Pendahuluan
Pada setiap survey GPR terdapatkemungkinan bahwa objek yang akan dideteksiterkubur pada kondisi tanah yang berbeda-beda.Kondisi tanah yang berbeda-beda aknmenyebabkan hasil pendeteksian yang berbeda- beda. Sehingga menjadi suatu hal penting bahwaantenna yang digunakan memiliki kemampuan
adaptasi terhadap kondisi tanah yang berbeda- beda tersebut.. Untuk mendapatkan hasil pendeteksian yang optimum maka pengaturanfootprint menjadi hal yang penting. Footprintyang optimum sebanding dengan dimensi luasandari objek yang akan dideteksi. Jika footprintantenna terlalu besar maka akan menghasilaknclutter yang besar. Jika footprint terlalu kecilmaka akan sulit dalam mengenali objek.
Pengaturan footprint menjadi suatutantangan dalam riset-riset pada bidang GPR.Pada paper ini dikembangkan sebuah antennayang memiliki kemampuan adaptasi terhadapkondisi tanah yang berbeda-beda sedemikinhingga footprint dapat terjaga relatif konstan.Pada paper ini dikaji array Modified dipoleuntuk antena adaptif terhadap footprint. Telahdijelaskan sebelumnya bahwa footprint antenna berhubungan dengan dimensi antena. Penelitiansebelumnya menunjukan bahwa pengaturanfootprint dilakukan dengan mengatur flare angle dari antenna wire bow-tie [1],[3]. Mengatur flareangle dari antena wire-bowtie berarti mengubah-
ubah aperture antena. Sistem antenna array yangdiuslukan terdiri dari beberapa elemen antennayang memiliki dimensi yang berbeda-beda,
namun memiliki karakteristik yang relatif sama.Footprint antenna akan besar jika dimensi antena besar dan sebaliknya. Kemudian denganmenggunakan RF Switch sirkit maka akandipilih elemen array yang akan dicatu bersesuaian dengan footprint yang akandihasilkan. RF Switch sirkit berfungsi untukmemilih elemen yang akan dicatu.
Coupling antar elemen pada array menjadi
penting untuk dipertimbangkan berhubungandengan skenario pengaturan footprint pada paragraf sebelumnya. Jika level coupling antarelemen besar maka skenario pengaturanfootprint dengan antenna array seperti yangdijelaskan sebelunya akan gagal. Terdapat beberapa metode yang yang telah diteliti untukmenekan level coupling. Level coupling padadipole array dapat ditekan dengan melapisiradiator dengan substrat dielektrik[6]. Levelcoupling pada dipole array dapat ditekan hinggadibawah -30 dB dengan memberikan slit, dan
memasang metal penghalang [7]. Metodetersebut tidak mendukung untuk mendapatkandesain yang kompak.
Pada penelitian yang kami lakukansebelunya menunjukan bahwa pembebananresistif dapat menekan level coupling anatarelemen pada array [8]. Tapi di sisi lain pembebanan resistif dapat mengurangi efisiensiradiasi. Namum pada system GPR masalah inidapat dipebaiki dengan lebih sederhana pada postprocessing. Sistem antena array ditunjukan pada gambar 2..
Methode Momonet (MoM) dipilih sebagaimetode numeric untuk analisa pada penelitian
Jakarta, 18 – 19 April 2007 8
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 17/156
ProsidingSeminar Radar Nasional 2007
ini. Dipilihnya metode momen mengacu padasistem GPR yang dimana antenna adaptif akandiimplementasikan. Antena adaptif yang akandikembangkan dimplementasikan SteppedFrequency Continuous Wave (SFCW) GPR.SFCW-GPR adalah radar domain frekuensi.Suatu N-lement array dapat dimodelkan sebagaisuatu N-port network. Matrik Scattering danmatrik impedansi dapat dihitung denganmenggabungkan antara MoM dengan persamaan N-port Network .
SFCW-GPR
Salah satu kendala dalam sistem radarimpulse adalah melakukan pembangkitan pulsasempit yang akan ditembakkan pada objek target.
Semakin sempit pulsa, maka semakin komplekmetode dan piranti yang digunakan. Dengankonsep relasi Transformasi Fourier maka pembangkitan pulsa dapat didekati dengansintesa frekuensi, yaitu dengan melakukan penyapuan dari frekuensi rendah ke frekuensitinggi. Sistem SFCW-GPR ditunjukan padagambar 1.
Gambar 1: Sistem SFCW GPR
Struktur Array untuk Antena Adaptif
terhadap Footprint
Perancangan antena untuk aplikasi GPRselalu mengacu pada suatu kebutuhan aplikasitertentu. Jadi sangat tidak mungkin suatu antenadapat digunakan secara universal untuk berbagaiaplikasi dengan kinerja yang setara. Untuk
aplikasi SFCW maka kriteria yang harusdipenuh tidak terlalu ketat dibanding impulseradar. Terutama masalah liniearitas fasa. PadaSFCW linearitas fasa tidak menjadi pertimbangan yang terlalu penting seperti padaimpulse radar [2].
Untuk mendapatkan kemampuan adaptasimengatur footprint pada kondisi tanah yang berbeda-beda maka diusulkan suatu antena arraydengan elemen penyusun yang memiliki dimensi berbeda-beda. Kemudian secara elektronik akandilakukan pengaturan elemen yang akan dicatudengan rangkaian RF Switch. Untukmendapatkan footprint yang besar maka elemenyang dicatu diplih yang besar, begitu pulasebaliknya. Sedang elemen yang lain yang tidakdicatu, menjadi elemen yang diharapkan tidak
menghasilkan radiasi yang signifikan yangdiakibatkan adanya efek coupling . Efekcoupling harus ditekan seminimal mungkinsehingga skenario untuk mengatur footprintantena dengan memilih elemen antena yangakan dicatu, tidak gagal.
Percobaan sebelumnya menunjukan bahwa pembebanan resistif pada ujung-ujung antennamicrostrip dipole dapat mereduksi couplingantar elemen secara signifikan[8]. Walaupun pembebanan secara resistif akan menurunkanefisiensi radiasi, tapi pada aplikasi GPR dapat
dilakukan kompensasi pada postprocessing .Teknik ini lebih sederhana dan lebih efektifdalam menekan coupling dibanding beberapateknik yang telah diteliti sebelumnya.Berdasarkan hal diatas maka antenna adaptifuntuk SFCW GPR dirancang menggunakanstruktur array dengan pembebanan resistif dan pengaturan pencatuan secara eletronikmenggunakan RF switch.
A/DConv.
+IFFT
FrequencySynthesizer
Display
Modified dipole array dikaji sebagai antennaadaptif terhadap footprint untuk GPR.
Gambar 2: Modified microstrip dipole arraydengan pembebanan resisitif.
I Q
TX a na
QuadratureMixer
Resistive load
nten RX antenna
Substratedielektric Feeding circuit
Ground planeRF
Jakarta, 18 – 19 April 2007 9
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 18/156
ProsidingSeminar Radar Nasional 2007
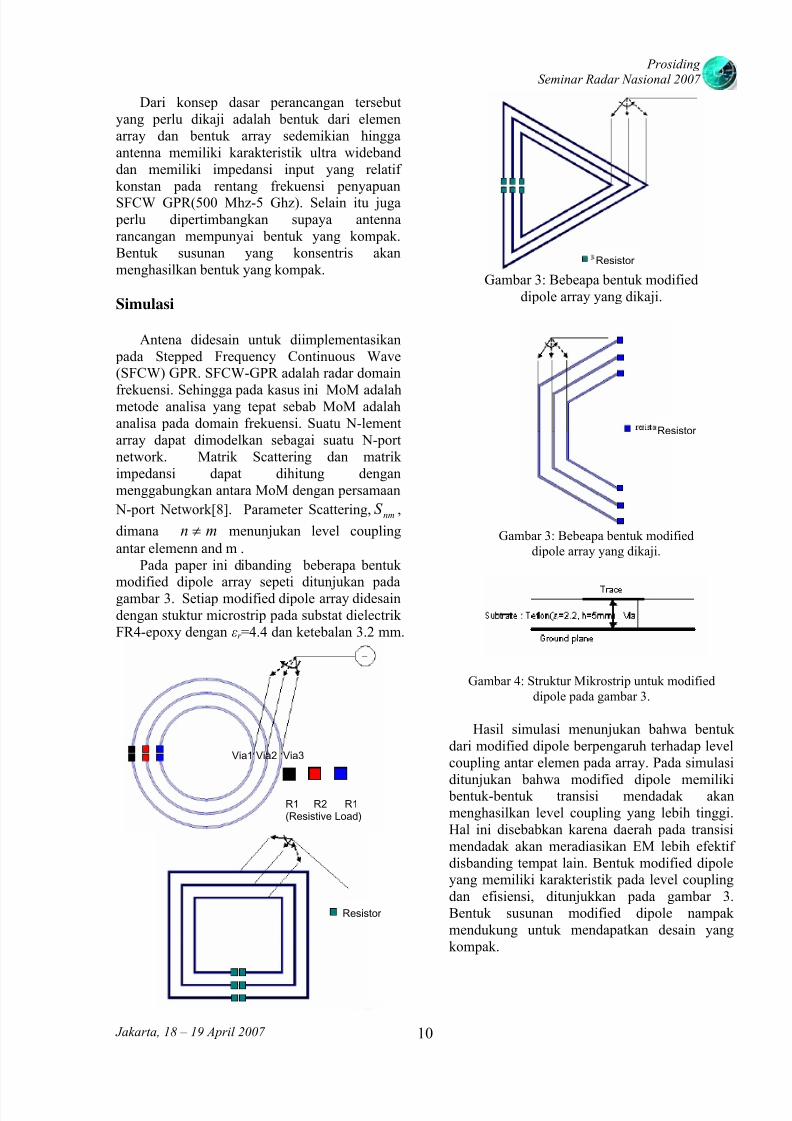
Dari konsep dasar perancangan tersebutyang perlu dikaji adalah bentuk dari elemenarray dan bentuk array sedemikian hinggaantenna memiliki karakteristik ultra widebanddan memiliki impedansi input yang relatifkonstan pada rentang frekuensi penyapuanSFCW GPR(500 Mhz-5 Ghz). Selain itu juga perlu dipertimbangkan supaya antennarancangan mempunyai bentuk yang kompak.Bentuk susunan yang konsentris akanmenghasilkan bentuk yang kompak.
Resistor
Simulasi
Antena didesain untuk diimplementasikan pada Stepped Frequency Continuous Wave(SFCW) GPR. SFCW-GPR adalah radar domain
frekuensi. Sehingga pada kasus ini MoM adalahmetode analisa yang tepat sebab MoM adalahanalisa pada domain frekuensi. Suatu N-lementarray dapat dimodelkan sebagai suatu N-portnetwork. Matrik Scattering dan matrikimpedansi dapat dihitung denganmenggabungkan antara MoM dengan persamaan
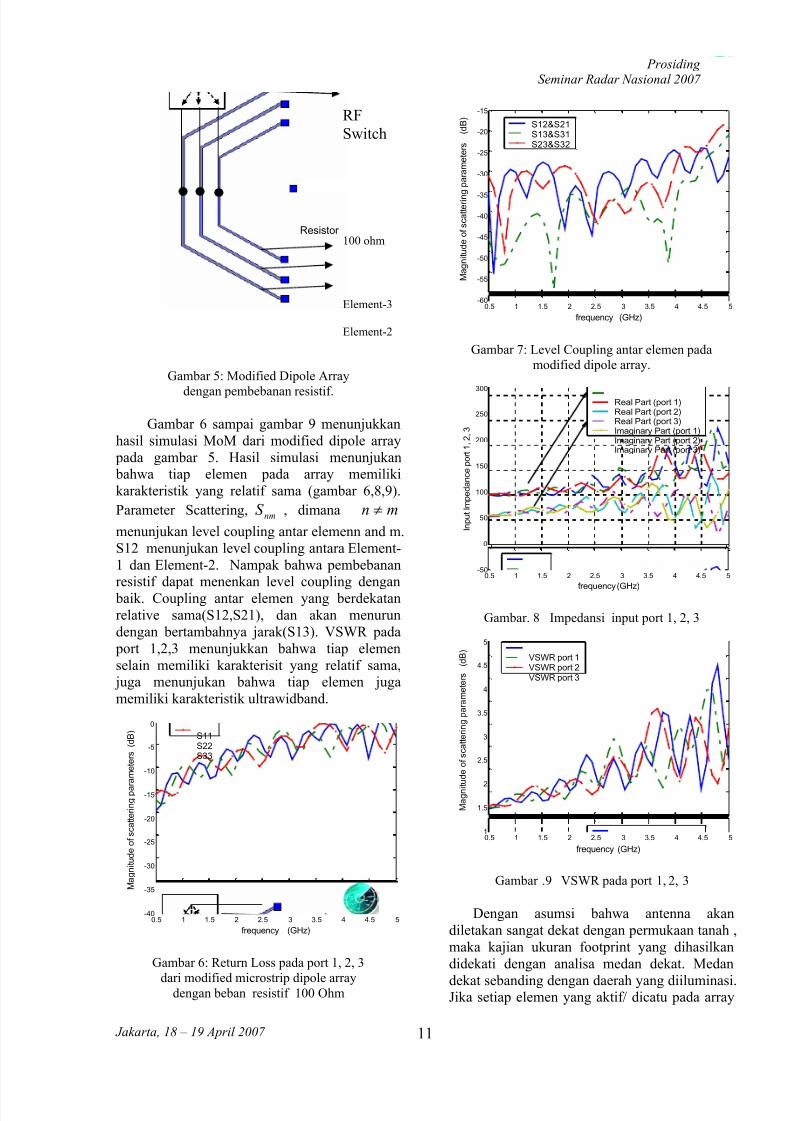
N-port Network[8]. Parameter Scattering, ,
dimana menunjukan level coupling
antar elemenn and m .
nmS
mn ≠
Pada paper ini dibanding beberapa bentuk
modified dipole array sepeti ditunjukan padagambar 3. Setiap modified dipole array didesaindengan stuktur microstrip pada substat dielectrikFR4-epoxy dengan εr =4.4 dan ketebalan 3.2 mm.
Gambar 3: Bebeapa bentuk modifieddipole array yang dikaji.
Resistor
Gambar 3: Bebeapa bentuk modifieddipole array yang dikaji.
Gambar 4: Struktur Mikrostrip untuk modifieddipole pada gambar 3.
Hasil simulasi menunjukan bahwa bentukdari modified dipole berpengaruh terhadap levelcoupling antar elemen pada array. Pada simulasi
ditunjukan bahwa modified dipole memiliki bentuk-bentuk transisi mendadak akanmenghasilkan level coupling yang lebih tinggi.Hal ini disebabkan karena daerah pada transisimendadak akan meradiasikan EM lebih efektifdisbanding tempat lain. Bentuk modified dipoleyang memiliki karakteristik pada level couplingdan efisiensi, ditunjukkan pada gambar 3.Bentuk susunan modified dipole nampakmendukung untuk mendapatkan desain yangkompak.
Via1 Via2 Via3
R1 R2 R1(Resistive Load)
Resistor
Jakarta, 18 – 19 April 2007 10
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 19/156
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 20/156
ProsidingSeminar Radar Nasional 2007
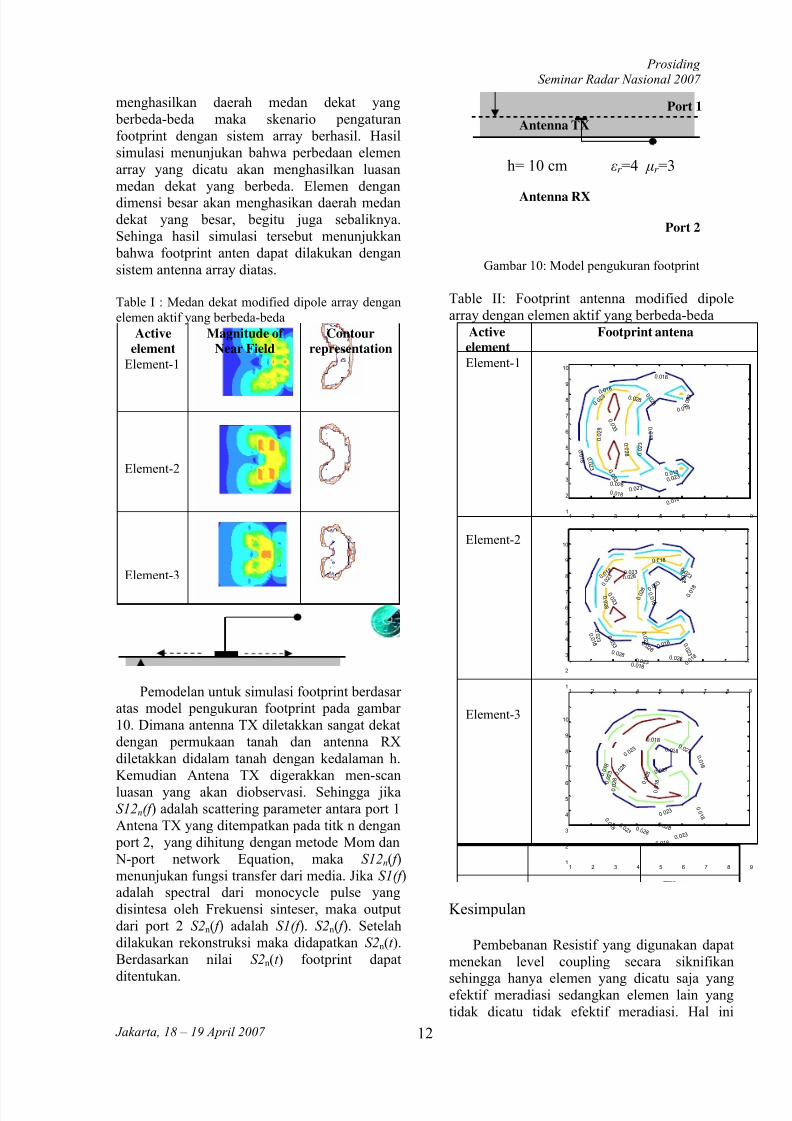
menghasilkan daerah medan dekat yang berbeda-beda maka skenario pengaturanfootprint dengan sistem array berhasil. Hasilsimulasi menunjukan bahwa perbedaan elemenarray yang dicatu akan menghasilkan luasanmedan dekat yang berbeda. Elemen dengandimensi besar akan menghasikan daerah medandekat yang besar, begitu juga sebaliknya.Sehinga hasil simulasi tersebut menunjukkan bahwa footprint anten dapat dilakukan dengansistem antenna array diatas.
Table I : Medan dekat modified dipole array denganelemen aktif yang berbeda-beda
Active
element
Magnitude of
Near Field
Contour
representation
Element-1
Element-2
Element-3
Pemodelan untuk simulasi footprint berdasaratas model pengukuran footprint pada gambar10. Dimana antenna TX diletakkan sangat dekatdengan permukaan tanah dan antenna RXdiletakkan didalam tanah dengan kedalaman h.Kemudian Antena TX digerakkan men-scanluasan yang akan diobservasi. Sehingga jikaS12n(f ) adalah scattering parameter antara port 1Antena TX yang ditempatkan pada titk n dengan port 2, yang dihitung dengan metode Mom dan N-port network Equation, maka S12n( f )menunjukan fungsi transfer dari media. Jika S1(f )adalah spectral dari monocycle pulse yangdisintesa oleh Frekuensi sinteser, maka outputdari port 2 S2n( f ) adalah S1(f ). S2n( f ). Setelahdilakukan rekonstruksi maka didapatkan S2n(t ).Berdasarkan nilai S2n(t ) footprint dapat
ditentukan.
Port 1 Antenna TX
h= 10 cm εr =4 µr =3
Antenna RX
Port 2
Gambar 10: Model pengukuran footprint
Table II: Footprint antenna modified dipolearray dengan elemen aktif yang berbeda-beda
Active
element
Footprint antena
Element-1
1 2 3 4 5 6 7 8 91
2
3
4
5
6
7
8
9
10
0. 0 1 8
0.018
0. 0 1 8
0 . 0 1 8
0. 01 8
0. 0 1 8
0 .0 18
0 . 0 1 8
0. 0 2
3 0
. 0 2 3
0 .
0 2 3
0. 0 2 3
0 . 0 2 3
0 . 0
2 3
0. 0 2 3
0 .0 2 8
0 . 0 2 8
0.028
0 .
0 2 8
0 . 0
3 3
0 . 0 3 3
Element-2
1 2 3 4 5 6 7 8 91
2
3
4
5
6
7
8
9
10
0. 0 1
8
0.018
0 . 0 1 8
0 . 0 1 8
0. 0 1 8
0. 0 1
8
0 .0 18
0 . 0 1 8
0.0230 .0 2 3
0. 0 2
3
0 . 0 2 3
0 . 0 2 3
0 .0 2 3
0 . 0 2 3
0 . 0 2 3 0.0 28
0 . 0 2 8
0 . 0 2 8
0 .0 2 8
0 .0 2 8
0 .0 2 8
0 . 0 2 8
0 . 0 3 3
0 . 0 3 3
Element-3
1 2 3 4 5 6 7 8 91
2
3
4
5
6
7
8
9
10
0.018
0 . 0 1 8
0 . 0 1 8
0.018
0 . 0 1 8
0 . 0 1 8
0 .
0 1 8
0. 0 2
3 0 .0 2 3
0. 0 2 3
0. 0 2 3
0. 0 2 3
0 .0 2 3
0 . 0
2 3 0
. 0 2 8
0 .0 2 8
0 . 0
2 8
0 .0 2 8 0 .0 2 8
0 . 0
2 8
Kesimpulan
Pembebanan Resistif yang digunakan dapatmenekan level coupling secara siknifikan
sehingga hanya elemen yang dicatu saja yangefektif meradiasi sedangkan elemen lain yangtidak dicatu tidak efektif meradiasi. Hal ini
Jakarta, 18 – 19 April 2007 12

8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 21/156
ProsidingSeminar Radar Nasional 2007
terjadi karena arus induksi akan diserap oleh beban resistif pada tiap elemen parasif.
Struktur konsentrik dapat direalisasikan pada Modified dipole array sehinggamendukung untuk mendapatkan bentuk yangkompak. Hasil simulasi menunjuka bahwaelemen array yang memiliki bentuk-bentuktransisi mendadak akan memiliki level couplingyang lebih tinggi.
Hasil simulasi menunjukan bahwa setiapelemen aktif pada antena array menghasilkanluasan medan dekat yang berbeda. Ukuranmedan dekat sebanding dengan dimensi antena.Begitu juga hasil simulasi footprint pada TabelII juga menunjukan kesimpulan yang sama.Sehingga disimpulkan bahwa pengaturanfootprint dapat dilakukan dengan sistem antenna
array yang diusulkan.
Referensi [1] A.A. Lestari, Antennas for Improved
Ground Penetrating Radar: Modeling
Tools, Analysis and Design, Ph.D.dissertaion, Delft University ofTechnology, The Netherlands, 2003.
[2] J. Daniel, Ground Penetrating Radar 2nd
Edition, IEE Radar Sonar, Navigation AndAvionics Series 15, 2004.
[3] A.A. Lestari, A.G. Yarovoy, L.P. Ligthart,
“Adaptive wire bow-tie antenna for GPRapplications”, IEEE Transactions on
Antennas and Propagation, vol. 53, no. 5, pp. 1745-1754, May 2005.
[4] A.A. Lestari, A.G. Yarovoy, L.P. Ligthart,“Numerical and experimental analysis ofcircular-end wire bow-tie antennas over alossy ground”, IEEE Transactions on
Antennas and Propagation, vol. 52, no. 1, pp. 26-35, January 2004.
[5] A.A. Lestari, A.G. Yarovoy, L.P. Ligthart,“Analysis and design of improved
antennas for GPR”, Subsurface Sensing
Technologies and Applications, vol. 3, no.4, pp. 345-376, October 2002.
[6] Pisti B Katehi, “Mutual Coupling BetweenMicrostrip Dipoles in MultielementArrays”, IEEE Transaction Antenna And
Propagation. Vol 37, No. 3, March 1989.[7] Tatsuo Itoh, “Planar Antenna Arrays for
Ku/Q Bands”, Department of ElectricalEngineering, University of California, LosAngeles, California 90095. Final Report2000-2001 for MICRO Project 00-041:Rockwell Science Center.
[8] A. Pramudita, A.Kurniawan, A.BSuksmono, “ Resistive Loading forCoupling Reduction Between element inarray antenna for GPR”, Proceeding ofJoint International Conference on TSSA-
WSSA, Bandung, Dec 2006. R. S. Elliottand G. J. Stern." The design of microstripdipole arrays including mutual coupling,Part I: Theorq ." IEFE Trans.Antennas
Propagation. vol ,4P-29. pp. 757-760.Sept. 1981.
[9] G. J. Stern and R. S. Elliott, "The designof microstrip dipole arrays Includlngmutual coupling, Part 11: Experiment."
IEEE Trans.Antennas Propagation.. vol.AP-29. pp. 761-165. Sept. 1981.
[10] N. G. Alcxopoulos and I. E. Rana.
"Mutual impedance computation between printed dipoles.".IEEE Trans.Antennas
Propagation.vol. AP-29, Jan.1981.[11] D. M. Pozar, "Input impedance and
mutual coupling of rectangular microstripantenna”, IEEE Trans. Anrennas
Propagution.vol.AP-30. Nov. 1982.[12] E. Rana and N. G. Alexopoulos, "Current
distribution and input impedance of printed dipole,” IEEE Trans. Antennas
Propagation vol. AP-29.Jan 1981(447 k
I
Jakarta, 18 – 19 April 2007 13

8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 22/156
ProsidingSeminar Radar Nasional 2007
Pembuatan Voltage Control Oscilator untuk Perangkat Pemancar Jamming
Elan Djaelani1),Daday Ruhiat2)
1)Pusat Penelitian Informatika-LIPIJl.Cisitu No.21/154D.Kompleks LIPI Bandung.40135
Telp.022-2504711,Fax.022-25047122)Pusat Penelitian Elektronika dan Telekomunikasi-LIPIJl.Cisitu No.21/154D.Kompleks LIPI Bandung.40135
Telp.022-2504660,Fax.022-2504659
Abstract
Research on developing of Voltage Control Oscilator (VCO) for a jamming signal transmitter unit has beencarried out. A jamming signal transmitter is a radio transmitter used to destroy the function of electroniccommunication system. Jamming’s done by using a signal with same frequency and much higher power level. Itmakes the receiver will detect only the higher power jamming signal, lost the intended signal, and cause
communication trouble of totally mulfunction. A jamming signal transmitter unit requires a wide bandwidth. VCO has to work on higher frequency in order to
gain a wide enough deviation, because increasing the working frequency higher increaser the deviation proportionally.Output of the VCO worked on high frequency has a wide bandwidth. Because intended signal should have lower frequency, mixing process have to be done. This system’s called heterodyne system.
Output of the mixing process, with LO frequency, is the IF operating frequency of jamming transmitter. It willbe bandpass -filtered out, amplified up to certain signal level and it will be transmitted through a broadbandantenna. After several trial’s completed, the reserach succesfully results a VCO prototype for the jammingtransmitter unit.
Keywords : Voltage Control Oscilator, jamming, IF.
Abstrak
Telah dilakukan penelitian mengenai pembuatan Voltage Control Oscilator (VCO) untuk keperluan perangkat pemancar jamming. Perangkat pemancar jamming adalah pemancar radio yang digunakan untuk melumpuhkan sistim komunikasi elektronik dengan cara menimpa atau menutupi sinyal dari suatu pemancar dengan sinyal lain
( sinyal jamming) yang mempunyai frekuensi sama dan daya yang lebih besar, sehingga penerima hanya akanmendeteksi sinyal jamming yang mempunyai daya lebih besar, ini akan mengakibatkan komunikasi terganggu atau
bahkan macet sama sekali.VCO dengan bandwidth yang lebar diperlukan untuk membuat sinyal jamming pada perangkat pemancar
jamming. Untuk memperoleh deviasi (penyimpangan) yang cukup lebar, suatu VCO harus bekerja pada frekuensi yang lebih tinggi, semakin tinggi frekuensi kerja VCO maka deviasi yang terjadi adalah berbanding lurus.
Pembuatan VCO bekerja pada frekuensi lebih tinggi akan mencapai bandwidth yang lebar,karena frekuensikeluaran yang dikehendaki lebih rendah, diperlukan proses penurunan frekuensi dengan demikian perlu proses
mixing dan sistim ini disebut dengan system heterodyne Dari proses mixing dengan frekuensi LO diperoleh frekuensi IF, dalam hal ini daerah frekuensi operasi pemancar
jamming.Selanjutnya setelah dilewatkan kedalam suatu Bandpass Filter frekuensi IF tersebut diperkuat oleh suatu
Amplifier sehingga menghasilkan daya tertentu untuk selanjutnya dipancarkan melalui sebuah Antena broadband.Setelah melalui percobaan percobaan telah dapat diperoleh prototipe VCO yang diperlukan perangkat pemancar jamming.
Kata kunci: Voltage Control Oscilator, Jamming, IF.
1. Pendahuluan
Perangkat pemancar jamming adalah pemancar radio yang digunakan untuk
melumpuhkan sistim komunikasi elektronikdengan cara menimpa atau menutupi sinyal dari
suatu pemancar dengan sinyal lain ( sinyal jamming) yang mempunyai frekuensi sama dandaya yang lebih besar , sehingga penerima hanyaakan mendeteksi sinyal jamming yang
mempunyai daya lebih besar, ini akan
Jakarta, 18 – 19 April 2007 14
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 23/156
ProsidingSeminar Radar Nasional 2007
mengakibatkan komunikasi terganggu atau bahkan macet sama sekali.
Perangkat pemancar jamming akan dibuatmempunyai spesifikasi sebagai berikut :
Daerah frekuensi: 30MHz – 80 MhzSistem: Pemancar Heterodyne
Modulasi : Modulasi Frekwensi / ModulasiAmplituda.Input Modulasi : Wideband Noise
Pembawa : Sweeper 30 – 80 MhzWaktu Sweep : VariablePower Output : 100Watts
Harmonic Frekuensi out of band- 45 dB
Antenna : Broadband Omnidirectional
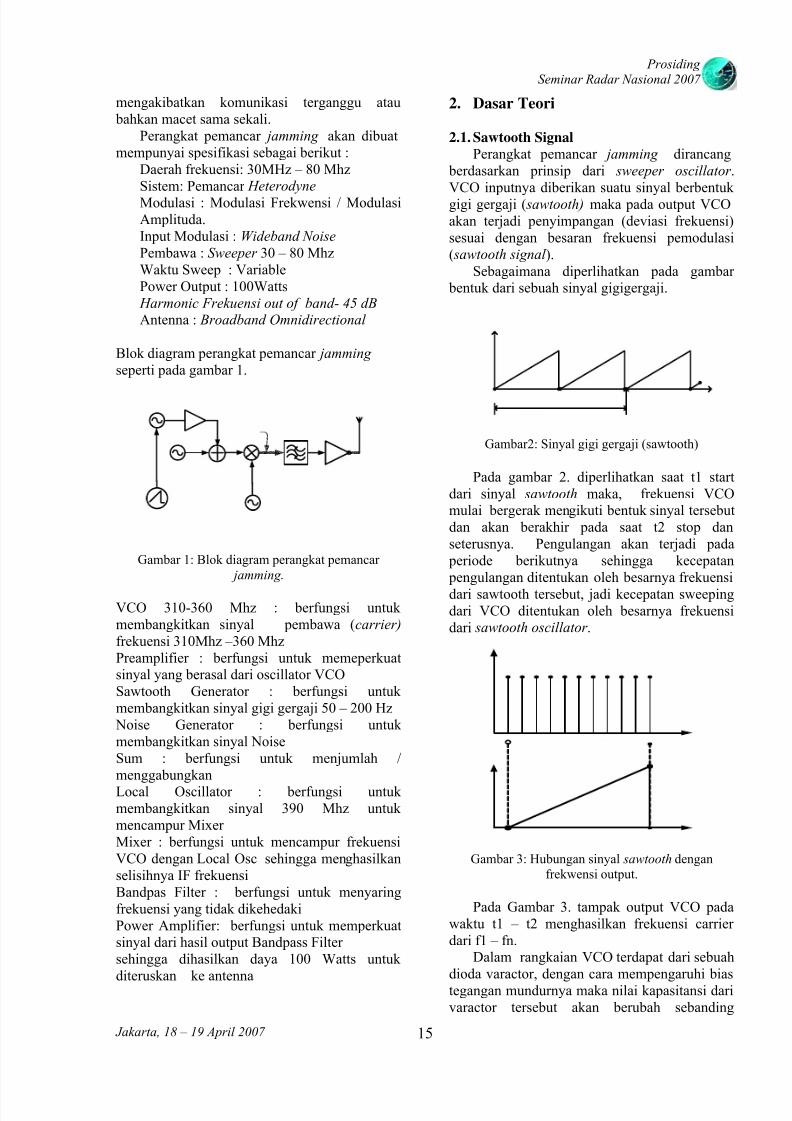
Blok diagram perangkat pemancar jamming seperti pada gambar 1.
Gambar 1: Blok diagram perangkat pemancar jamming .
VCO 310-360 Mhz : berfungsi untukmembangkitkan sinyal pembawa (carrier)
frekuensi 310Mhz –360 MhzPreamplifier : berfungsi untuk memeperkuatsinyal yang berasal dari oscillator VCOSawtooth Generator : berfungsi untukmembangkitkan sinyal gigi gergaji 50 – 200 Hz Noise Generator : berfungsi untukmembangkitkan sinyal NoiseSum : berfungsi untuk menjumlah /menggabungkanLocal Oscillator : berfungsi untukmembangkitkan sinyal 390 Mhz untukmencampur MixerMixer : berfungsi untuk mencampur frekuensiVCO dengan Local Osc sehingga menghasilkanselisihnya IF frekuensiBandpas Filter : berfungsi untuk menyaringfrekuensi yang tidak dikehedakiPower Amplifier: berfungsi untuk memperkuatsinyal dari hasil output Bandpass Filtersehingga dihasilkan daya 100 Watts untuk
diteruskan ke antenna
2. Dasar Teori
2.1. Sawtooth Signal
Perangkat pemancar jamming dirancang berdasarkan prinsip dari sweeper oscillator .VCO inputnya diberikan suatu sinyal berbentukgigi gergaji ( sawtooth) maka pada output VCOakan terjadi penyimpangan (deviasi frekuensi)sesuai dengan besaran frekuensi pemodulasi( sawtooth signal ).
Sebagaimana diperlihatkan pada gambar bentuk dari sebuah sinyal gigigergaji.
Gambar2: Sinyal gigi gergaji (sawtooth)
Pada gambar 2. diperlihatkan saat t1 startdari sinyal sawtooth maka, frekuensi VCOmulai bergerak mengikuti bentuk sinyal tersebutdan akan berakhir pada saat t2 stop danseterusnya. Pengulangan akan terjadi pada periode berikutnya sehingga kecepatan pengulangan ditentukan oleh besarnya frekuensi
dari sawtooth tersebut, jadi kecepatan sweepingdari VCO ditentukan oleh besarnya frekuensidari sawtooth oscillator .
Gambar 3: Hubungan sinyal sawtooth denganfrekwensi output.
Pada Gambar 3. tampak output VCO padawaktu t1 – t2 menghasilkan frekuensi carrierdari f1 – fn.
Dalam rangkaian VCO terdapat dari sebuahdioda varactor, dengan cara mempengaruhi biastegangan mundurnya maka nilai kapasitansi darivaractor tersebut akan berubah sebanding
Jakarta, 18 – 19 April 2007 15
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 24/156
ProsidingSeminar Radar Nasional 2007
dengan perubahan tegangan biasnya, sehinggafrekuensi VCO ikut berubah juga.
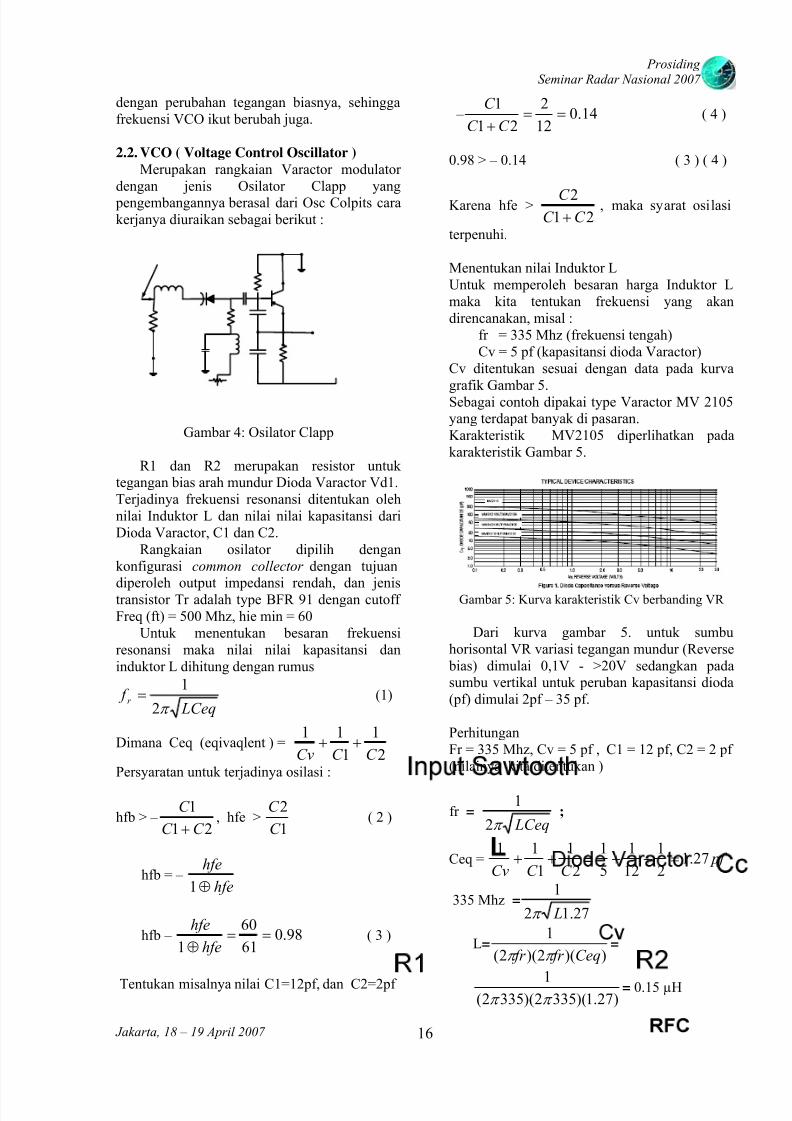
2.2. VCO ( Voltage Control Oscillator )
Merupakan rangkaian Varactor modulatordengan jenis Osilator Clapp yang pengembangannya berasal dari Osc Colpits carakerjanya diuraikan sebagai berikut :
Gambar 4: Osilator Clapp
R1 dan R2 merupakan resistor untuktegangan bias arah mundur Dioda Varactor Vd1.Terjadinya frekuensi resonansi ditentukan olehnilai Induktor L dan nilai nilai kapasitansi dariDioda Varactor, C1 dan C2.
Rangkaian osilator dipilih dengankonfigurasi common collector dengan tujuan
diperoleh output impedansi rendah, dan jenistransistor Tr adalah type BFR 91 dengan cutoffFreq (ft) = 500 Mhz, hie min = 60
Untuk menentukan besaran frekuensiresonansi maka nilai nilai kapasitansi daninduktor L dihitung dengan rumus
LCeq f r
π 2
1= (1)
Dimana Ceq (eqivaqlent ) =2
1
1
11
C C Cv++
Persyaratan untuk terjadinya osilasi :
hfb > – 21
1
C C
C
+, hfe >
1
2
C
C ( 2 )
hfb = –hfe
hfe
⊕1
hfb – 98.061
60
1==
⊕ hfe
hfe ( 3 )
Tentukan misalnya nilai C1=12pf, dan C2=2pf
– 14.012
2
21
1==
+ C C
C ( 4 )
0.98 > – 0.14 ( 3 ) ( 4 )
Karena hfe >21
2C C
C +
, maka syarat osilasi
terpenuhi.
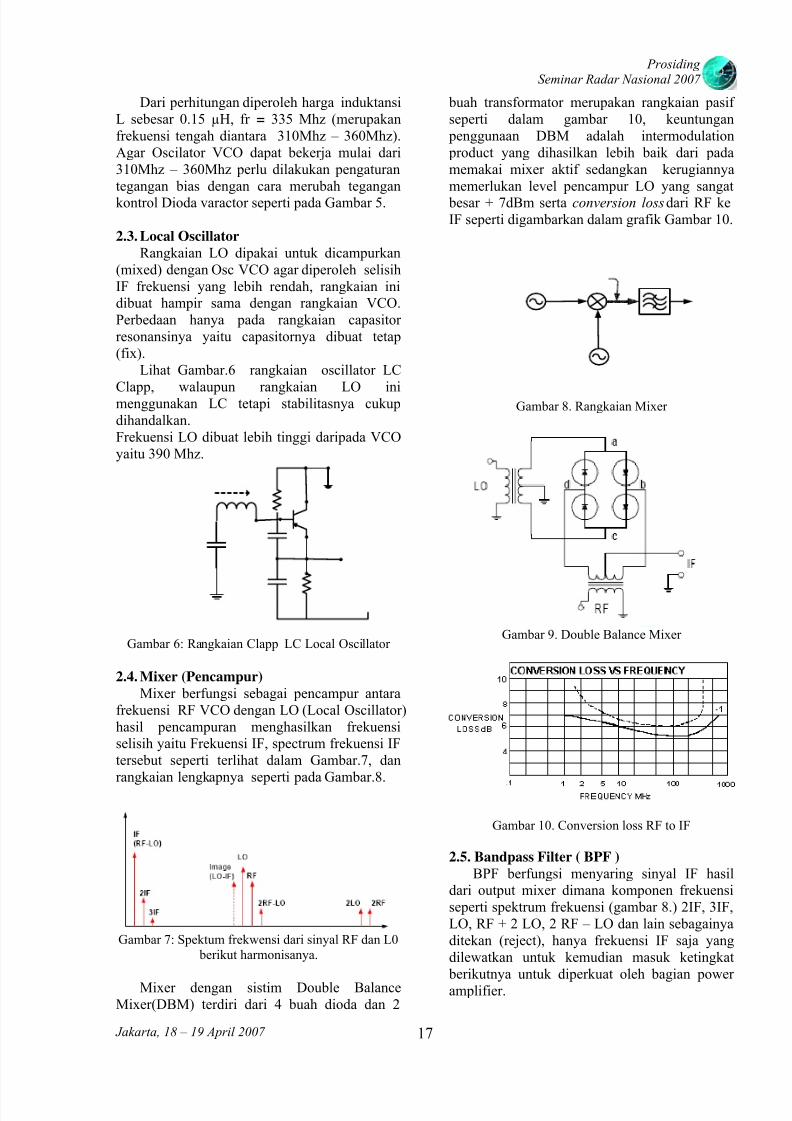
Menentukan nilai Induktor LUntuk memperoleh besaran harga Induktor Lmaka kita tentukan frekuensi yang akandirencanakan, misal :
fr = 335 Mhz (frekuensi tengah)Cv = 5 pf (kapasitansi dioda Varactor)
Cv ditentukan sesuai dengan data pada kurva
grafik Gambar 5.Sebagai contoh dipakai type Varactor MV 2105yang terdapat banyak di pasaran.Karakteristik MV2105 diperlihatkan padakarakteristik Gambar 5.
Gambar 5: Kurva karakteristik Cv berbanding VR
Dari kurva gambar 5. untuk sumbuhorisontal VR variasi tegangan mundur (Reverse bias) dimulai 0,1V - >20V sedangkan padasumbu vertikal untuk peruban kapasitansi dioda(pf) dimulai 2pf – 35 pf.
PerhitunganFr = 335 Mhz, Cv = 5 pf , C1 = 12 pf, C2 = 2 pf(nilainya kita ditentukan )
LCeqπ 2
1 fr = ;
pf 27.12
1
12
1
5
1=++
2
1
1
11
C C Cv++Ceq = =
335 Mhz =27.12
1
Lπ
))(2)(2(
1
Ceq fr fr π π L= =
)27.1)(3352)(3352(1π π
= 0.15 µH
Jakarta, 18 – 19 April 2007 16
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 25/156
ProsidingSeminar Radar Nasional 2007
Dari perhitungan diperoleh harga induktansiL sebesar 0.15 µH, fr = 335 Mhz (merupakanfrekuensi tengah diantara 310Mhz – 360Mhz).Agar Oscilator VCO dapat bekerja mulai dari310Mhz – 360Mhz perlu dilakukan pengaturantegangan bias dengan cara merubah tegangankontrol Dioda varactor seperti pada Gambar 5.
2.3. Local Oscillator
Rangkaian LO dipakai untuk dicampurkan(mixed) dengan Osc VCO agar diperoleh selisihIF frekuensi yang lebih rendah, rangkaian inidibuat hampir sama dengan rangkaian VCO.Perbedaan hanya pada rangkaian capasitorresonansinya yaitu capasitornya dibuat tetap(fix).
Lihat Gambar.6 rangkaian oscillator LC
Clapp, walaupun rangkaian LO inimenggunakan LC tetapi stabilitasnya cukupdihandalkan.Frekuensi LO dibuat lebih tinggi daripada VCOyaitu 390 Mhz.
Gambar 6: Rangkaian Clapp LC Local Oscillator
2.4. Mixer (Pencampur)
Mixer berfungsi sebagai pencampur antarafrekuensi RF VCO dengan LO (Local Oscillator)hasil pencampuran menghasilkan frekuensiselisih yaitu Frekuensi IF, spectrum frekuensi IFtersebut seperti terlihat dalam Gambar.7, danrangkaian lengkapnya seperti pada Gambar.8.
Gambar 7: Spektum frekwensi dari sinyal RF dan L0 berikut harmonisanya.
Mixer dengan sistim Double BalanceMixer(DBM) terdiri dari 4 buah dioda dan 2
buah transformator merupakan rangkaian pasifseperti dalam gambar 10, keuntungan penggunaan DBM adalah intermodulation product yang dihasilkan lebih baik dari padamemakai mixer aktif sedangkan kerugiannyamemerlukan level pencampur LO yang sangat besar + 7dBm serta conversion loss dari RF keIF seperti digambarkan dalam grafik Gambar 10.
Gambar 8. Rangkaian Mixer
Gambar 9. Double Balance Mixer
Gambar 10. Conversion loss RF to IF
2.5. Bandpass Filter ( BPF )
BPF berfungsi menyaring sinyal IF hasildari output mixer dimana komponen frekuensiseperti spektrum frekuensi (gambar 8.) 2IF, 3IF,LO, RF + 2 LO, 2 RF – LO dan lain sebagainyaditekan (reject), hanya frekuensi IF saja yangdilewatkan untuk kemudian masuk ketingkat berikutnya untuk diperkuat oleh bagian poweramplifier.
Jakarta, 18 – 19 April 2007 17
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 26/156
ProsidingSeminar Radar Nasional 2007
Spesifikasi BPFFrekuensi kerja : 30 – 80 MhzImpedansi : 50 Passband Frequency : 50 Mhz (BW)Insertion Loss filter : max 3 dBRipple factor : ± 1 dB
3. Metodologi
Pada pembuatan Voltage Control Oscilator ini penulis melaksanakan metoda reverse
engineering . Peralatan sweep generator yangada dan biasa dipergunakan di laboratoriummerupakan salah satu sumber dari bahan studiliteratur.Buku manual menerangkan prinsip kerja dari
sweep generator kami pelajari ,sehingga kami
mengetahui prinsip dari sweep generator.Pada buku tersebut juga ada diagram bloksistem sweep generator beserta diagram-skematiknya.
Komponen komponen baik pasif dan aktifseperti : transistor, resistor, capasitor, induktor,trafo dan lainnya yang ada pada buku manualdipelajari data datanya untuk dipergunakanuntuk mencari komponen ekivalennya, sesuaiyang ada di pasar komponen elektronika kita.Percobaan percobaan dilaksanakan dengan caracoba langsung tiap blok, lalu diukur hasilnya
serta hasil pengukuran dievaluasi. Uji cobadilaksanakan terus sehingga didapatkan hasilyang baik.
Dari hal diatas dapat disimpulkan bahwametodologi yang kami laksanakan adalahsebagai berikut :1. Studi literatur dari manual peralatan sweep
generator.2. Mengumpulkan data data komponen yang
dipergunakan peralatan sweep generator.3. Mengumpulkan data data komponen
equivalent yang dipergunakan peralatan
sweep generator.4.
Mendisain ulang sweep generator dengankomponen yang ada dipasar , terutama bagian Voltage Control Oscillator..
5.
Mencoba pembuatan blok rangkaian yangmerupakan bagian dari Voltage Control
Oscillator.
6. Pengukuran hasil percobaan danmelaksanakan evaluasi.
7. Mengulangi percobaan,pengukuran danevaluasi sampai didapatkan Voltage Control
Oscillator yang memenuhi persyaratanuntuk perangkat jamming.
4. Hasil dan Pembahasan
4.1. Hasil Pengukuran Sawtooth Generator
Diagram blok pengukuran adalah seperti pada Gambar 11.
Gambar 11: Diagram blok pengukuran SawtoothGenerator
Gambar 12: Foto hasil pengukuran SawtoothGenerator
Sinyal output Sawtooth Generator ini telahmampu membuat ( sebagai input VCO) VCO
mengeluarkan output frekwensi dengan deviasiyang lebar.
4.2. Hasil Pengukuran Voltage Control
Oscillator ( VCO )
Diagram blok pengukuran adalah seperti pada gambar13.
Gambar 13: Diagram blok pengukuran Voltage
Control Oscillator ( VCO )
Gambar 14: Foto hasil pengukuran Voltage ControlOscillator
Jakarta, 18 – 19 April 2007 18
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 27/156
ProsidingSeminar Radar Nasional 2007
Output VCO dengan frekwensi center = 335MHz dan levelnya = -1,5 dBm.
4.3. Hasil Pengukuran Local Oscillator
Diagram blok pengukuran adalah seperti pada Gambar 15.
Gambar 15: Diagram blok pengukuran LocalOscillator
Gambar 16: Foto hasil pengukuran Local Oscillator
Output Local Oscilator dengan frekwensi = 390MHz dan levelnya = +7 dBm.
4.4. Hasil Pengukuran VCO Yang dimodulasi
oleh Sinyal Sawtooth
Diagram blok pengukuran adalah seperti pada gambar17.
Gambar 17: Diagram blok pengukuran VCOdimodulasi Sinyal Sawtooth
Gambar.18. Foto hasil pengukuran VCO dimodulasi
Sinyal Sawtooth
Hasil pengukuran VCO dengan daerahkerja frekwensi 310 Mhz - 360 MHz danmempunyai level 0 dBm.
4.5. Hasil Pengukuran IF
Diagram blok pengukuran adalah seperti pada Gambar 19.
Gambar 19: Diagram blok pengukuran IF.
Gambar 20: Foto hasil pengukuran IF.
Hasil pengukuran IF dengan frekwensi
center = 55 Mhz dan deviasi beberapa MHzdengan level -4 dBm.
4.6. Hasil Pengukuran IF melalui BPF
Diagram blok pengukuran adalah seperti pada gambar 21.
SawtoothOscillator
LO Oscillator
IF OutVCO
IF BPF
Gambar 21: Diagram blok pengukuran IF melaluiBPF.
Jakarta, 18 – 19 April 2007 19
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 28/156
ProsidingSeminar Radar Nasional 2007
1. Suhana Hermana,ST ,Daday Ruhiat,Amd,Agus Witarna,Djaelani, Dede Ibrahim,Patricius, dan Dardi, Puslit Elektronika danTelekomunikasi-LIPI.
2. Ir.Rustamaji,MT, Jurusan Teknik Elektro,FTI, ITENAS.
3. Ir.Rusmana,MT, PenelitiDISLITBANGAL, TNI AL.
4. Bambang Sugiarto,ST, RidodiAnantaprama,ST, Agus Subekti,ST,MT.,Rico Dahlan,ST. Puslit Informatika-LIPI.
5. yang telah membantu dalam pekerjaan ini.
Gambar 22: Foto hasil pengukuran IF melalui BPF. 7. Daftar Pustaka
Hasil pengukuran IF dengan frekwensicenter = 55 Mhz dan deviasi 25 MHz dengan
level = -7 dBm.
[1] International Defense Review - ElectronicWarfare
[2] Military Technology - Electronic inDefence5. Kesimpulan
Dengan mengamati hasil pengukuran padaGambar 22 terlihat output VCO yang bekerja pada daerah 30MHz – 80 MHz , menyapusebagian dari pada daerah frekwensi tersebut.
Output VCO ini akan diperkuat oleh PowerAmplifier dan seterusnya akan dipancarkanmelalui antena yang broadband.
Frekwensi yang berubah dengan cepat dan
bergerak berulang ulang ini akan menimpa ataumenutupi sinyal dari suatu pemancar yangditerima oleh penerima yang berada pada jangkauan pemancar jamming , sehingga penerima hanya akan mendeteksi sinyal jamming yang mempunyai daya lebih besar, iniakan mengakibatkan komunikasi terganggu atau bahkan macet sama sekali.
Dari hasil pengukuran dan juga ujicobaVCO yang dibuat telah sesuai dengan kebutuhanVCO untuk perangkat pemancar jamming.
[3] Defences Electronic - The Electronic Navy
[4] R, Skaug, J.F. Hjelmstad – SpreadSpectrum In Communication
[5] Marvin K. Simon etc – Spread SpectrumCommunication
[6] Rustamaji; Elan Djaelani, ‘PemancarFrequency Hopping Spead SpectrumUntuk Pengamanan Sinyal Informasi”,Jurnal Teknologi Informasi LIPI, Vol 3 no
1, 2002.[7] Rustamaji; Elan Djaelani, ‘Frequency
Hopping Spead Spectrum Suatu TeknikPengamanan Komunikasi Pada PerangElektronika (Electronic Warfare)”,Prosiding, Pemaparan Hasil Litbang 2003LIPI, 2003
[8] Small, M,”HF Amateur Band FrequencySyntheziser”, Electronic Wireless World,Vol 85 no 1519.
[9] Plessey Semiconductor, “FrequencyDividers and Synthesyzers IC Handbook”.
6. Ucapan Terima Kasih
Penelitian ini dilaksanakan di PuslitElektronika dan Telekomunikasi-LIPI. Terimakasih disampaikan kepada :
[10] Ulrich L, Rohde; T T NBucher,”Communication Receiver :Principles and Design”,McGraw Hill.
[11] NEC, Manual Books Sweep Generator.
Jakarta, 18 – 19 April 2007 20

8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 29/156
ProsidingSeminar Radar Nasional 2007
Frequency Modulation Continuous Wave (FM-CW) Radar
Rustini Soemaryato Kayatmo*)
*)Pusat Penelitian Elektronika dan TelekomunikasiJl. Cisitu 21/154D (Komplek LIPI Gd 20) Bandung 40135 Indonesia
Phone: 022-2504660 Fax: 022-2504659 Email: [email protected]
Abstract
All types of modulation either Pulsed or CW Radar are equally good in providing detection against abackground of thermal noise, so long as the receiving system is matched to the transmitted spectrum. The highincidence of pulsed-radar system in actual use testifies to their advantages in a number of practical matters,
however. First is the available isolation between transmitter and receiver, which is accomplished by time switchingin the duplexer of the pulsed radar. Systems using modulated CW transmissions have been built for a number of
applications, but there are always serious problems encountered in isolation of the receiver and transmitter, whichoften raise the receiver noise level above that of thermal noise. Second, the time resolution between adjacenttargets and between targets and short range clutter is usually better in the pulsed systems than is the frequencyresolution of c-w system[1]. However, FM-CW radar has grown to a mature state owing to new breakthrough in
microwave and computer hardware. FM-CW radar requires low output power, hence avoids hardwarecomplications which arise as a result of high power requirements as in case of pulsed radar[2].
Keywords : CW Radar, modulation, detection, Pulse, FM-CW.
Abstrak
Semua jenis modulasi baik radar pulsa maupun c-w, memberikan pendeteksian yang sama baiknya terhadap
background thermal noise, sepanjang system penerimanya sesuai dengan spektrum yang dipancarkan. Akan tetapi pada sistem radar pulsa (pulsed radar), dalam penggunaannya mempunyai berbagai keuntungan. Pertama,memungkinkan terjadinya isolasi antara pemancar dan penerima, yang dilakukan oleh time switching yang ada diduplexer dari radar pulsa. Sistem yang menggunakan transmisi c-w telah dibuat untuk sejumlah penggunaan,namun selalu ada permasahalan yang serius yang menyangkut isolasi antara penerima dan pemancar, yang sering
menaikkan level noise penerima diatas thermal noise. Kedua, resolusi waktu (time resolution) antara target-target yang bersebelahan dan antara target-target yang lain dan benda-benda sekitar (clutter) jarak dekat biasanya lebihbaik pada sistem radar pulsa daripada resolusii frekuensi pada system c-w[1]. Akan tetapi FM-CW radar sekarang sudah menjadi lebih matang dengan adanya terobosan di piranti keras (hardware) gelombang mikro (microwave)dan computer. FM-CW radar hanya memerlukan daya rendah, makai dapat menghindari kasulitan di piranti keras,tidak seperti pada radar pulsa yang memerlukan daya tinggi[2].
Kata kunci : CW Radar, modulasi, deteksi Pulse, FM-CW.
1. Pendahuluan
Radar atau Radio Detection and Ranging adalah suatu sistem yang menggunakangelombang elektromagnetik untuk mengamati jangkauan, ketinggian, arah atau kecepatan baikobyek bergerak maupun diam seperti pesawatterbang, kapal laut, kendaraan bermotor,keadaan cuaca dan lapangan. Adapun prinsipkerjanya adalah, suatu pemancar memancarkangelombang radio, yang direfleksikan oleh targetdan dideteksi oleh alat penerima yang biasanya berlokasi ditempat yang sama dengan alat pemancar. Walaupun sinyal radio yang
dikembalikan biasanya sangat lemah, sinyalradio tersebut dengan mudah dapat diperkuat.Hal ini memungkinkan radar dapat mendeteksi
obyek pada jangkauan dimana pancaran lainseperti suara atau sinar, sangat lemah untukdideteksi, oleh karena itu penggunaan radarmempunyai keuntungan antara lain: [3]
Dapat mendeteksi target yang beradaditempat yang sangat jauh;
Dapat mengukur jangkauan dengancepat dan teliti;
Dapat bekerja ditempat gelap dandisegala cuaca dengan uap, asap, kabutdan sebagainya;
Kecepatan relatif dari target dapatdiukur.
Adapun kelemahannya: Aspek resolusi yang terbatas:o Raw video yang mewakili sinyal
yang kembali tidak
Jakarta, 18 – 19 April 2007 21
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 30/156
ProsidingSeminar Radar Nasional 2007
mengindikasikan sudut target(target angle);
o Sulit untuk membedakan obyek-obyek yang berdekatan
Kadang-kadang sinyal yang kembali palsu
Radar banyak digunakan untuk berbagaikeperluan seperti:
Mendeteksi dan mengukur jarak obyekdi tanah, laut maupun udara;
Air Traffic Control; Guidance; Tracking Penggunaan di Meteorologi; Pengukuran kecepatan; Remote sensing Untuk menghindari benturan/tabrakan
2. Jenis-jenis Sistem Radar
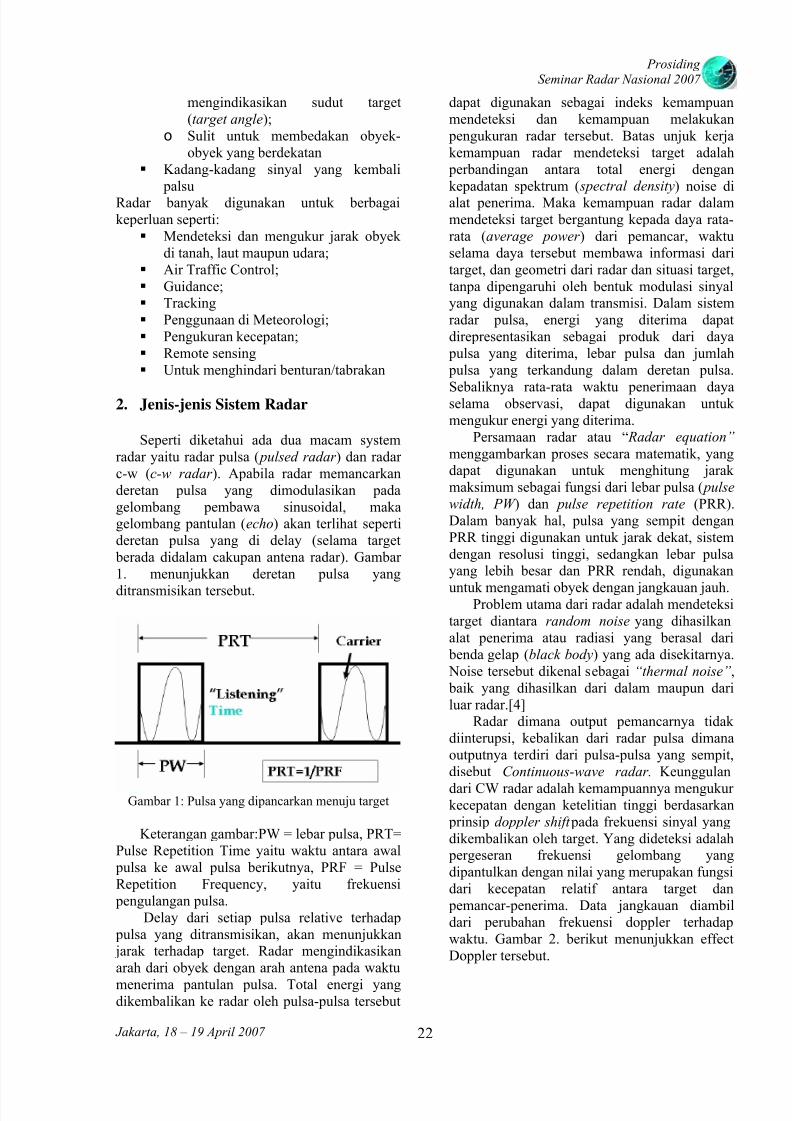
Seperti diketahui ada dua macam systemradar yaitu radar pulsa ( pulsed radar ) dan radarc-w (c-w radar ). Apabila radar memancarkanderetan pulsa yang dimodulasikan padagelombang pembawa sinusoidal, makagelombang pantulan (echo) akan terlihat sepertideretan pulsa yang di delay (selama target berada didalam cakupan antena radar). Gambar1. menunjukkan deretan pulsa yang
ditransmisikan tersebut.
Gambar 1: Pulsa yang dipancarkan menuju target
Keterangan gambar:PW = lebar pulsa, PRT=Pulse Repetition Time yaitu waktu antara awal pulsa ke awal pulsa berikutnya, PRF = PulseRepetition Frequency, yaitu frekuensi pengulangan pulsa.
Delay dari setiap pulsa relative terhadap pulsa yang ditransmisikan, akan menunjukkan jarak terhadap target. Radar mengindikasikanarah dari obyek dengan arah antena pada waktu
menerima pantulan pulsa. Total energi yangdikembalikan ke radar oleh pulsa-pulsa tersebut
dapat digunakan sebagai indeks kemampuanmendeteksi dan kemampuan melakukan pengukuran radar tersebut. Batas unjuk kerjakemampuan radar mendeteksi target adalah perbandingan antara total energi dengankepadatan spektrum ( spectral density) noise dialat penerima. Maka kemampuan radar dalammendeteksi target bergantung kepada daya rata-rata (average power ) dari pemancar, waktuselama daya tersebut membawa informasi daritarget, dan geometri dari radar dan situasi target,tanpa dipengaruhi oleh bentuk modulasi sinyalyang digunakan dalam transmisi. Dalam sistemradar pulsa, energi yang diterima dapatdirepresentasikan sebagai produk dari daya pulsa yang diterima, lebar pulsa dan jumlah pulsa yang terkandung dalam deretan pulsa.
Sebaliknya rata-rata waktu penerimaan dayaselama observasi, dapat digunakan untukmengukur energi yang diterima.
Persamaan radar atau “ Radar equation” menggambarkan proses secara matematik, yangdapat digunakan untuk menghitung jarakmaksimum sebagai fungsi dari lebar pulsa ( pulse
width, PW ) dan pulse repetition rate (PRR).Dalam banyak hal, pulsa yang sempit denganPRR tinggi digunakan untuk jarak dekat, sistemdengan resolusi tinggi, sedangkan lebar pulsayang lebih besar dan PRR rendah, digunakan
untuk mengamati obyek dengan jangkauan jauh.Problem utama dari radar adalah mendeteksi
target diantara random noise yang dihasilkanalat penerima atau radiasi yang berasal dari benda gelap (black body) yang ada disekitarnya. Noise tersebut dikenal sebagai “thermal noise”, baik yang dihasilkan dari dalam maupun dariluar radar.[4]
Radar dimana output pemancarnya tidakdiinterupsi, kebalikan dari radar pulsa dimanaoutputnya terdiri dari pulsa-pulsa yang sempit,disebut Continuous-wave radar. Keunggulan
dari CW radar adalah kemampuannya mengukurkecepatan dengan ketelitian tinggi berdasarkan prinsip doppler shift pada frekuensi sinyal yangdikembalikan oleh target. Yang dideteksi adalah pergeseran frekuensi gelombang yangdipantulkan dengan nilai yang merupakan fungsidari kecepatan relatif antara target dan pemancar-penerima. Data jangkauan diambildari perubahan frekuensi doppler terhadapwaktu. Gambar 2. berikut menunjukkan effectDoppler tersebut.
Jakarta, 18 – 19 April 2007 22
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 31/156
ProsidingSeminar Radar Nasional 2007
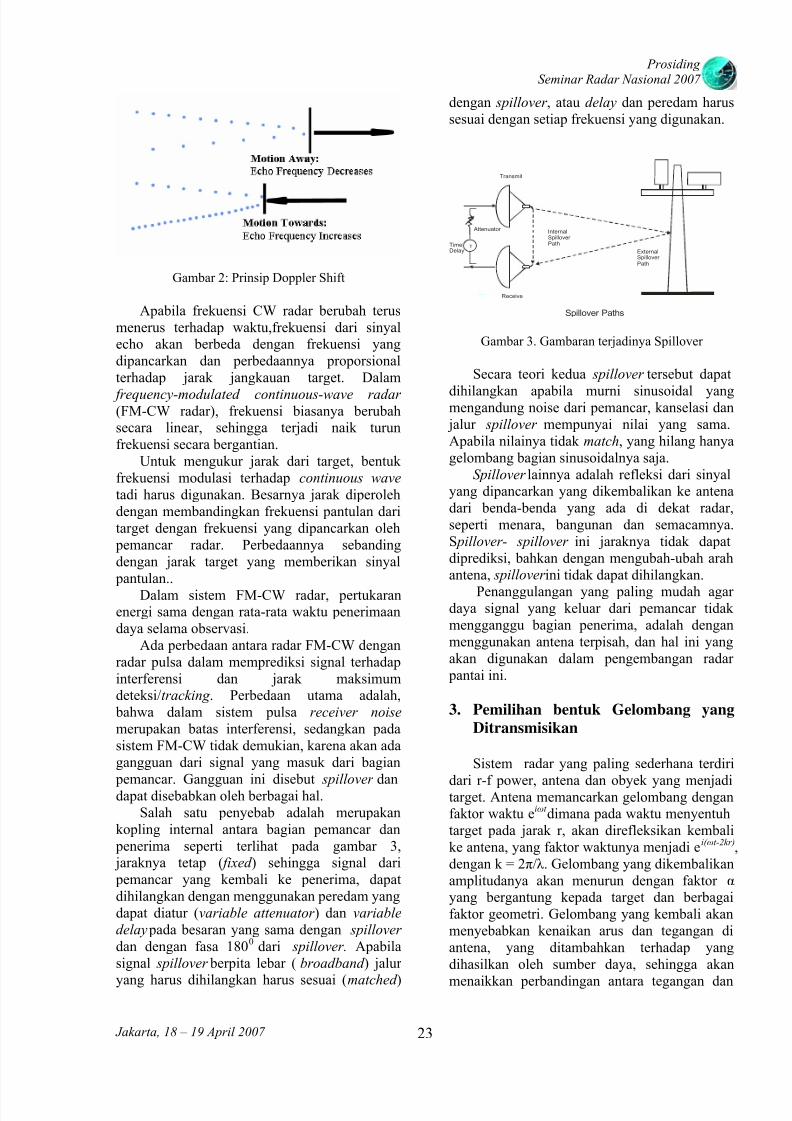
Gambar 2: Prinsip Doppler Shift
Apabila frekuensi CW radar berubah terusmenerus terhadap waktu,frekuensi dari sinyalecho akan berbeda dengan frekuensi yangdipancarkan dan perbedaannya proporsionalterhadap jarak jangkauan target. Dalam
frequency-modulated continuous-wave radar(FM-CW radar), frekuensi biasanya berubahsecara linear, sehingga terjadi naik turunfrekuensi secara bergantian.
Untuk mengukur jarak dari target, bentukfrekuensi modulasi terhadap continuous wave tadi harus digunakan. Besarnya jarak diperolehdengan membandingkan frekuensi pantulan daritarget dengan frekuensi yang dipancarkan oleh pemancar radar. Perbedaannya sebandingdengan jarak target yang memberikan sinyal pantulan..
Dalam sistem FM-CW radar, pertukaranenergi sama dengan rata-rata waktu penerimaandaya selama observasi.
Ada perbedaan antara radar FM-CW denganradar pulsa dalam memprediksi signal terhadapinterferensi dan jarak maksimumdeteksi/tracking . Perbedaan utama adalah, bahwa dalam sistem pulsa receiver noise merupakan batas interferensi, sedangkan padasistem FM-CW tidak demukian, karena akan adagangguan dari signal yang masuk dari bagian
pemancar. Gangguan ini disebut spillover dandapat disebabkan oleh berbagai hal.Salah satu penyebab adalah merupakan
kopling internal antara bagian pemancar dan penerima seperti terlihat pada gambar 3, jaraknya tetap ( fixed ) sehingga signal dari pemancar yang kembali ke penerima, dapatdihilangkan dengan menggunakan peredam yangdapat diatur (variable attenuator ) dan variable
delay pada besaran yang sama dengan spillover dan dengan fasa 1800 dari spillover. Apabilasignal spillover berpita lebar ( broadband ) jalur
yang harus dihilangkan harus sesuai (matched )
dengan spillover , atau delay dan peredam harussesuai dengan setiap frekuensi yang digunakan.
T
Transmit
Receive
Attenuator
TimeDelay
InternalSpillover Path
ExternalSpillover Path
Spillover Paths
Gambar 3. Gambaran terjadinya Spillover
Secara teori kedua spillover tersebut dapat
dihilangkan apabila murni sinusoidal yangmengandung noise dari pemancar, kanselasi dan jalur spillover mempunyai nilai yang sama.Apabila nilainya tidak match, yang hilang hanyagelombang bagian sinusoidalnya saja.
Spillover lainnya adalah refleksi dari sinyalyang dipancarkan yang dikembalikan ke antenadari benda-benda yang ada di dekat radar,seperti menara, bangunan dan semacamnya.S pillover- spillover ini jaraknya tidak dapatdiprediksi, bahkan dengan mengubah-ubah arahantena, spillover ini tidak dapat dihilangkan.
Penanggulangan yang paling mudah agardaya signal yang keluar dari pemancar tidakmengganggu bagian penerima, adalah denganmenggunakan antena terpisah, dan hal ini yangakan digunakan dalam pengembangan radar pantai ini.
3. Pemilihan bentuk Gelombang yang
Ditransmisikan
Sistem radar yang paling sederhana terdiri
dari r-f power, antena dan obyek yang menjaditarget. Antena memancarkan gelombang denganfaktor waktu eiωt dimana pada waktu menyentuhtarget pada jarak r, akan direfleksikan kembalike antena, yang faktor waktunya menjadi ei( ωt-2kr),dengan k = 2π/λ. Gelombang yang dikembalikanamplitudanya akan menurun dengan faktor α yang bergantung kepada target dan berbagaifaktor geometri. Gelombang yang kembali akanmenyebabkan kenaikan arus dan tegangan diantena, yang ditambahkan terhadap yangdihasilkan oleh sumber daya, sehingga akan
menaikkan perbandingan antara tegangan dan
Jakarta, 18 – 19 April 2007 23

8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 32/156
ProsidingSeminar Radar Nasional 2007
arus atau impedansi yang berubah terhadap nilai pada waktu tidak ada target.
Secara prinsip, impedansi ini dapat diukurdengan skala absolut dan deviasi dari skalanormal pada waktu tidak ada target, nilainyadianggap sebagai adanya target.
Dalam praktek hal ini tidak mungkin karenasignal yang dikembalikan besarnya hanya 10-9 kali tegangan yang dipancarkan, maka sebagaihasilnya variasi dari impedansi merupakan satu bagian dari 109. Variasi semacam itu hampirtidak dapat diukur baik di laboratorium, dilapangan sendiri maupun pada frekuensigelombang mikro. Oleh karena itu, perlu dibuatagar perubahan signal yang kembali dapatdiukur, selain menggunakan pengukuran secaraabsolut.
Hal ini memerlukan perubahan yangdisebabkan oleh proses modulasi. Modulasidisini dimaksudkan termasuk perubahan yangdisebabkan oleh signal yang diinduksikan olehtarget maupun signal yang berasal daritransmitter. Semua sistem radar yangdimungkinkan dapat diklasifikasikan dalamgambaran tipe modulasi dan penggunaaninformasi yang dihasilkan.
Semua jenis modulasi baik radar pulsamaupun c-w, memberikan pendeteksian yangsama baiknya terhadap background thermal
noise, sepanjang system penerimanya sesuaidengan spektrum yang dipancarkan. Akan tetapi pada sistem radar pulsa (pulsed radar), dalam penggunaannya mempunyai berbagaikeuntungan. Pertama, memungkinkan terjadinyaisolasi antara pemancar dan penerima, yangdilakukan oleh time switching yang ada diduplexer dari radar pulsa. Sistem yangmenggunakan transmisi c-w telah dibuat untuksejumlah penggunaan, namun selalu ada permasahalan yang serius yang menyangkutisolasi antara penerima dan pemancar, yang
sering menaikkan level noise penerima diatasthermal noise. Kedua, resolusi waktu (timeresolution) antara target-target yang bersebelahan dan antara target-target yang laindan benda-benda sekitar (clutter) jarak dekat biasanya lebih baik pada sistem radar pulsadaripada resolusii frekuensi pada system c-w[1].
Hal lain yang perlu dipertimbangkan padasistem CW, antara lain energi dipancarkansepanjang atau hampir sepanjang waktu. Hampirsepanjang waktu disini dapat diartikan sebagai paling tidak 10% dari waktu yang digunakanoleh sinyal untuk mencapai target. Inimerupakan presentase yang sangat besar
dibandingkan dengan yang biasanya digunakandalam radar pulsa, dimana energi yangdipancarkan biasanya kurang dari 0.1% dariwaktu. Dengan demikian untuk memperolehdaya rata-rata yang sama yang diterima olehtarget, radar pulsa memerlukan daya ouput pemancar yang jauh lebih besar dari daya output pemancar FM-CW radar.
Walaupun sistem CW mempunyaikelemahan-kelemahan dalam memberikaninformasi, namun dalam beberapa halmempunyai sejumlah alasan untukdipertimbangkan:
Pertama, ada kalanyamentransmisikan data dengankecepatan tinggi, tidak memberikankeuntungan. Sebagai contoh, dalam
hal altimeter, hanya ada satu target,yaitu tanah Arahnya sudah diketahuidan informasinya untuk jaraknyahanya memerlukan beberapa kalidalam satu detiknya. Radar altimeter biasanya melakukan observasi 100kali per detik, untuk menurunkankesalahan dalam merata-rata hasil pengukuran, walaupun demikian rateinformasi ini kecil;
Kedua, ada situasi dimana walaupunsedikit informasi dapat diperoleh
dengan mudah, banyak yang tidakmemungkinkan diperoleh. Keadaanseperti itu muncul dalam situasidimana benda-benda disekelilingnyatidak menentu, dimana sistem radar pulsa, bahkan dengan menggunakanalat MTI pun, gagal memberikaninformasi. Disisi lain sistem dopplertertentu dapat memberikaninformasiyang berguna dan memadai;
Ketiga, transmisi data dengankecepatan tinggi akan memerlukan
peralatan dengan kompleksitasw yangtinggi. Dalam beberapa hal penguatan( gain) tidak ada gunanya dan sistemCW sederhana cukup memadai;
Keempat, ada hal dimana tipe sistem pulsa tidak dapat digunakan, misalnyauntuk jangkauan yang turun sampainol misalnya
Kelima, daya yang diperlukan kecil,sehingga mengurangi kompleksitas peralatan. Dengan makin majunyaterobosan di bidang komponenelektronikik untuk peralatangelombang mikro, maka akan dapat
Jakarta, 18 – 19 April 2007 24

8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 33/156
ProsidingSeminar Radar Nasional 2007
5. Ucapan Terima Kasih
Ucapan terima kasih kami sampaikankepada PPET-LIPI dan Panitya Seminar, yangtelah memberikan kesempatan untuk menjadi pemakalah dalam Seminar RADAR Nasional ini.
dibuat peralatan yang ”fully solid
stae” jauh lebih murah daripadamenggunakan magnetron.
Dengan makin majunya di bidangcomputer, maka kelemahan-kelemahan dalam pemrosesan sinyal,yang sebelumnya sulit dilakukan, akandapat diatasi. 6. Daftar Pustaka
4. Kesimpulan
Dari uraian diatas dapat disimpulkan, bahwadengan adanya terobosan di piranti keras(hardware) gelombang mikro (microwave) dancomputer, FM-CW radar sudah semakin matang,apalagi FM-CW radar hanya memerlukan dayarendah, maka dapat menghindari kasulitan di
piranti keras, tidak seperti pada radar pulsa yangmemerlukan daya tinggi.[2], dengan demikikian peralatan CW radar dapat dibuat fully solid statedan harganya akan jauh lebih murah dari padayang menggunakan magnetron.
[1] Louis N. Ridenour, ”Radar SystemEngineering”, McGraw-Hill Book Company,Inc., New York an London 1947
[2] Ligthart, L.P.,Nieuwkerk, L.R., “Radar andSignal Processing”, IEEE Proceedings F,Volume 137, Issue 6, Dec 1990, pp. 418 –426
[3] Ligthart, L.P., “Short Course on Radar
Technologies” , Bandung Institute ofTechnology (ITB), Indonesia, September2005
[4] “Radars and Federal GovernmentApplications”, NTIA Special Publication00-40-Chapter 1, http://www.ntia.doc.gov/ osmhome/reports/ntia00-40/chapt1.htm
Jakarta, 18 – 19 April 2007 25
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 34/156
ProsidingSeminar Radar Nasional 2007
Potensi Electromagnetic Interference(EMI )
dari Pancaran Sinyal Radar Spurious
Sri Hardiati *)
*) Pusat Penelitian Elektronika dan Telekomunikasi
Jl Cisitu 21/154 D (Komplek LIPI Gd 20) 40135 INDONESIAPhone: 022 2504660 Fax: 022 2504659
Abstract
Operationa system of radar is exploiting electromagnetic spectrum, and in radar signal transmission can bedone with 2 type ,i.e. pulse transmission and continuous wave, Radiation of Radar signal has very hight energi
which will be reflected again by object, as an example is aircraft. Radar signal radiation ,in the form of pulses, has great possibility in producing Electromagnetic Interference
(EMI), that affection radar system operation and environment . Electromagnetic interference(EMI) that containsundesirable ,spurious,conducted ,or radiated signals of electrical origin, it can cause performance degradation in
operational environment.
Keywords : EMI, Radar, Noise
Abstrak
Sistem pengoperasian suatu radar adalah dengan memanfaatkan spektrum electromagnet , dan dalammentransmisikan sinyal radar dapat dilakukan dengan 2 tipe yaitu transmisi pulsa ( Pulse Transmission) dan
gelombang kontinyu (Continuous wave). Pancaran sinyal radar mempunyai enersi sangat tinggi, yang akandirefleksikan kembali oleh suatu obyek misalkan pesawat terbang.
Pancaran sinyal radar yang berupa pulsa-pulsa, besar sekali kemungkinannya sebagai penghasil Electromagnetikc Interference (EMI), yang berpengaruh tehadap pengoperasian sistem radar maupun terhadap
lingkungan sekitarnya . Electromagnetic Interference yang terdiri dari sinyal yang tidakdiinginkan,spurious,konduksi dan radiasi dari sinyal elektrik ,hal ini dapat menyebabkan penurunan performance
dalam lingkungan pengoperasiannya.
Kata kunci : EMI, Radar,Derau
1. Pendahuluan
Radar kepanjangan dari Radio Detection
And Ranging merupakan suatu alat yangmemancarkan suatu enersi radiasi, , dan enersitersebut dapat berupa gelombang kontinyu(countinuous wave/CW ) atau pulsa ,yangmempunyai enersi sangat tinggi ke suatu arah ,sehinggadengan radiasi ini benda-benda yangdilewati sinyal tersebut, sebagai contoh pesawatterbang akan memantulkan enersi yang terkirimke benda tersebut. Dan enersi radiasi yangsangat tinggi menimbulkan Electromagnetic
Interference ( EMI),.yang akan menggangudalam pengoperasian sistim radar. Pemantulanyang diberikan oleh benda-benda tersebut berupa suatu gema (echo) yang dapat diterimaoleh receiver di dekat peralatan pemancar enersitsb. Waktu berlalu antara pancaran sinyal dariradar dan kembalinya pancaran sinyal
merupakan fungsi jarak obyek/sasaran dan radaryang memancarkan sinyal tersebut.
Beberapa radar ditempatkan dalam daerahyang padat atau berjejal yang dipandang dengan pertimbangan –pertimbangan tertentu, sehinggaradar penempatannya harus bersama-samadengan peralatan lain, seperti radar harusditempatkan di bandara, pangkalan militer dansebagainya, maka penambahan secara kontinyu penggunaan radar dengan sistim melaluiudara,bantuan navigasi, observasi cuaca,satelit ,
dalam hal ini cenderung kearah penggunaanspektrum yang lebar/besar dan kepadatan penggunaan spektrum akan mengakibatkandalam persoalan gangguan (interference) yangmenjadi lebih komplek.
Radar yang mempunyai sistem untukmentransmisikan enersi elektromagnetik kearahsasaran yang dapat mendeteksi dan menentukan jangkauan dan kecepatan dari obyek/sasaran.Sinyal yang dihasilkan radar merupakan sinyalyang disengaja, yang dipancarkan ke dalamruang angkasa dan sistem berada dalamlingkungan elektromagnetik, maka perlu untukmemperhitungkan situasi electromagnetic
Jakarta, 18 – 19 April 2007 26
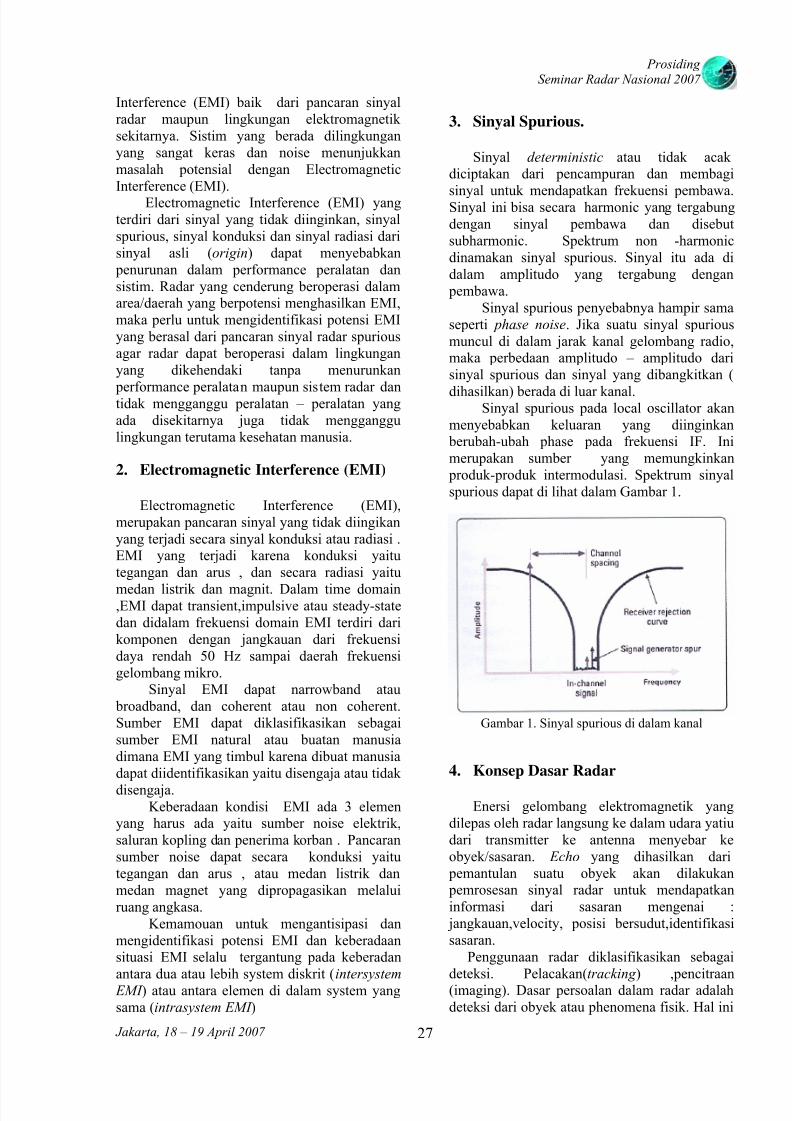
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 35/156
ProsidingSeminar Radar Nasional 2007
Interference (EMI) baik dari pancaran sinyalradar maupun lingkungan elektromagnetiksekitarnya. Sistim yang berada dilingkunganyang sangat keras dan noise menunjukkanmasalah potensial dengan ElectromagneticInterference (EMI).
Electromagnetic Interference (EMI) yangterdiri dari sinyal yang tidak diinginkan, sinyalspurious, sinyal konduksi dan sinyal radiasi darisinyal asli (origin) dapat menyebabkan penurunan dalam performance peralatan dansistim. Radar yang cenderung beroperasi dalamarea/daerah yang berpotensi menghasilkan EMI,maka perlu untuk mengidentifikasi potensi EMIyang berasal dari pancaran sinyal radar spuriousagar radar dapat beroperasi dalam lingkunganyang dikehendaki tanpa menurunkan
performance peralatan maupun sistem radar dantidak mengganggu peralatan – peralatan yangada disekitarnya juga tidak mengganggulingkungan terutama kesehatan manusia.
2. Electromagnetic Interference (EMI)
Electromagnetic Interference (EMI),merupakan pancaran sinyal yang tidak diingikanyang terjadi secara sinyal konduksi atau radiasi .EMI yang terjadi karena konduksi yaitutegangan dan arus , dan secara radiasi yaitu
medan listrik dan magnit. Dalam time domain,EMI dapat transient,impulsive atau steady-statedan didalam frekuensi domain EMI terdiri darikomponen dengan jangkauan dari frekuensidaya rendah 50 Hz sampai daerah frekuensigelombang mikro.
Sinyal EMI dapat narrowband atau broadband, dan coherent atau non coherent.Sumber EMI dapat diklasifikasikan sebagaisumber EMI natural atau buatan manusiadimana EMI yang timbul karena dibuat manusiadapat diidentifikasikan yaitu disengaja atau tidak
disengaja.Keberadaan kondisi EMI ada 3 elemen
yang harus ada yaitu sumber noise elektrik,saluran kopling dan penerima korban . Pancaransumber noise dapat secara konduksi yaitutegangan dan arus , atau medan listrik danmedan magnet yang dipropagasikan melaluiruang angkasa.
Kemamouan untuk mengantisipasi danmengidentifikasi potensi EMI dan keberadaansituasi EMI selalu tergantung pada keberadanantara dua atau lebih system diskrit (intersystem
EMI ) atau antara elemen di dalam system yangsama (intrasystem EMI )
3. Sinyal Spurious.
Sinyal deterministic atau tidak acakdiciptakan dari pencampuran dan membagi
sinyal untuk mendapatkan frekuensi pembawa.Sinyal ini bisa secara harmonic yang tergabungdengan sinyal pembawa dan disebutsubharmonic. Spektrum non -harmonicdinamakan sinyal spurious. Sinyal itu ada didalam amplitudo yang tergabung dengan pembawa.
Sinyal spurious penyebabnya hampir samaseperti phase noise. Jika suatu sinyal spuriousmuncul di dalam jarak kanal gelombang radio,maka perbedaan amplitudo – amplitudo darisinyal spurious dan sinyal yang dibangkitkan (
dihasilkan) berada di luar kanal.Sinyal spurious pada local oscillator akan
menyebabkan keluaran yang diinginkan berubah-ubah phase pada frekuensi IF. Inimerupakan sumber yang memungkinkan produk-produk intermodulasi. Spektrum sinyalspurious dapat di lihat dalam Gambar 1.
Gambar 1. Sinyal spurious di dalam kanal
4. Konsep Dasar Radar
Enersi gelombang elektromagnetik yangdilepas oleh radar langsung ke dalam udara yatiudari transmitter ke antenna menyebar keobyek/sasaran. Echo yang dihasilkan dari pemantulan suatu obyek akan dilakukan pemrosesan sinyal radar untuk mendapatkaninformasi dari sasaran mengenai : jangkauan,velocity, posisi bersudut,identifikasisasaran.
Penggunaan radar diklasifikasikan sebagaideteksi. Pelacakan(tracking ) ,pencitraan(imaging). Dasar persoalan dalam radar adalahdeteksi dari obyek atau phenomena fisik. Hal ini
Jakarta, 18 – 19 April 2007 27
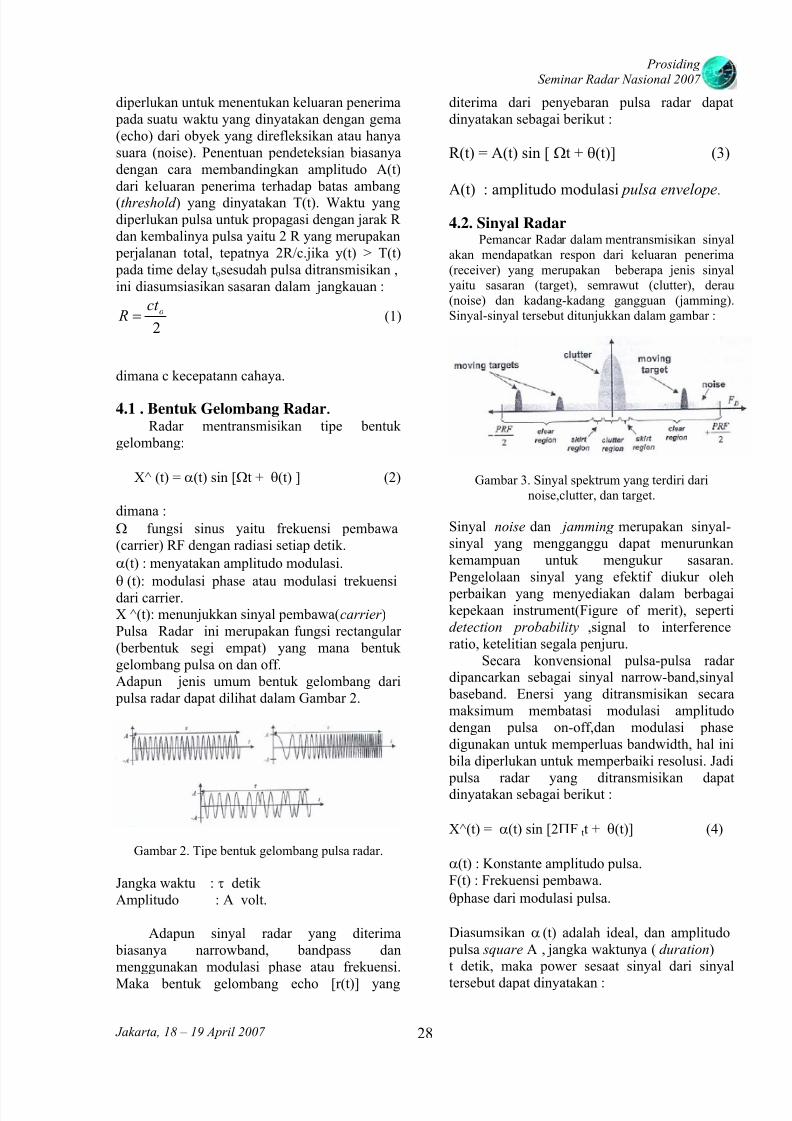
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 36/156
ProsidingSeminar Radar Nasional 2007
diperlukan untuk menentukan keluaran penerima pada suatu waktu yang dinyatakan dengan gema(echo) dari obyek yang direfleksikan atau hanyasuara (noise). Penentuan pendeteksian biasanyadengan cara membandingkan amplitudo A(t)dari keluaran penerima terhadap batas ambang(threshold ) yang dinyatakan T(t). Waktu yangdiperlukan pulsa untuk propagasi dengan jarak Rdan kembalinya pulsa yaitu 2 R yang merupakan perjalanan total, tepatnya 2R/c.jika y(t) > T(t) pada time delay to sesudah pulsa ditransmisikan ,ini diasumsiasikan sasaran dalam jangkauan :
2
oct R = (1)
dimana c kecepatann cahaya.
4.1 . Bentuk Gelombang Radar.
Radar mentransmisikan tipe bentukgelombang:
X^ (t) = α(t) sin [Ω t + θ(t) ] (2)
dimana :
Ω fungsi sinus yaitu frekuensi pembawa(carrier) RF dengan radiasi setiap detik.
α(t) : menyatakan amplitudo modulasi.
θ (t): modulasi phase atau modulasi trekuensidari carrier.X ^(t): menunjukkan sinyal pembawa(carrier )Pulsa Radar ini merupakan fungsi rectangular(berbentuk segi empat) yang mana bentukgelombang pulsa on dan off.Adapun jenis umum bentuk gelombang dari pulsa radar dapat dilihat dalam Gambar 2.
Gambar 2. Tipe bentuk gelombang pulsa radar.
Jangka waktu : τ detikAmplitudo : A volt.
Adapun sinyal radar yang diterima biasanya narrowband, bandpass danmenggunakan modulasi phase atau frekuensi.
Maka bentuk gelombang echo [r(t)] yang
diterima dari penyebaran pulsa radar dapatdinyatakan sebagai berikut :
R(t) = A(t) sin [ Ωt + θ(t)] (3)
A(t) : amplitudo modulasi pulsa envelope .
4.2. Sinyal RadarPemancar Radar dalam mentransmisikan sinyal
akan mendapatkan respon dari keluaran penerima(receiver) yang merupakan beberapa jenis sinyalyaitu sasaran (target), semrawut (clutter), derau(noise) dan kadang-kadang gangguan (jamming).Sinyal-sinyal tersebut ditunjukkan dalam gambar :
Gambar 3. Sinyal spektrum yang terdiri darinoise,clutter, dan target.
Sinyal noise dan jamming merupakan sinyal-sinyal yang mengganggu dapat menurunkankemampuan untuk mengukur sasaran.Pengelolaan sinyal yang efektif diukur oleh
perbaikan yang menyediakan dalam berbagaikepekaan instrument(Figure of merit), sepertidetection probability ,signal to interferenceratio, ketelitian segala penjuru.
Secara konvensional pulsa-pulsa radardipancarkan sebagai sinyal narrow-band,sinyal baseband. Enersi yang ditransmisikan secaramaksimum membatasi modulasi amplitudodengan pulsa on-off,dan modulasi phasedigunakan untuk memperluas bandwidth, hal ini bila diperlukan untuk memperbaiki resolusi. Jadi pulsa radar yang ditransmisikan dapatdinyatakan sebagai berikut :
X^(t) = α(t) sin [2Π F t t + θ (t)] (4)
α(t) : Konstante amplitudo pulsa.F(t) : Frekuensi pembawa.
θ phase dari modulasi pulsa.
Diasumsikan α (t) adalah ideal, dan amplitudo pulsa square A , jangka waktunya ( duration)t detik, maka power sesaat sinyal dari sinyal
tersebut dapat dinyatakan :
Jakarta, 18 – 19 April 2007 28
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 37/156
ProsidingSeminar Radar Nasional 2007
2
2 A P s = (5)
Sinyal pada keluaran penerima merupakan suatukombinasi echo x^(t) dari, sasaran ,clutter dannoise dan kemungkinan jamming. Sasaran dan
clutter merupakan echo yang tertunda dari pulsayang ditransmisikan, dan pulsa ini merupakansinyal narrowband meskipun amplitudo danmodulasi phase secara umum berubah-ubah. Noise yang ditrerima terlihat seperti sinyal acak. Jadi sinyal yang diterima menghasilkan echo pulsa tunggal dari penyebaran pada jangkauanR o = c t 0 /2 yang dapat dinyatakan :
(6))()()(
)]()(2[
0 t net t bt y
t t t F j t
+−=+− φ π
n(t): noise yang diterima.B(t): amplitudo echo.
φ(t): modulasi phase echo
5. Interaksi Electromagnetic Interference
(EMI) dan Radar
Pancaran sinyal Radar termasuk pancaranyang dibuat manusia yang secara umummerupakan sinyal radiasi narrowband dancoherent. Pancaran radar merupakan penghasil
Electromagnetic Interference (EMI), hal inidisebabkan :1. Daya pulsa puncak ( peak pulse )
mempunyai level tinggi , dimana levelnyasampai beberapa megawatt.
2. Menggunakan spektrum yang melebar ,halini disebabkan short pulse menempati baseband yang lebar.
3. Radiasi harmonic secara relatif tinggi.4. Frekuensi pembawa (carrier ) tinggi
,dimana radar dalam mengopersikan sinyalkopling efisien.
Dan Radar dalam pengoerasiannyamenggunakan spektrum frekuensi sampai beberapa GHz.
Penekanaan pancaran spurious dari radarkarena diperlukan untuk mengeliminasi clutter dan enersi yang tidak diinginkan untuk pengperasian dengan lingkunganelektromagnetik yang berbeda. Pancaranspurious yang rendah yang tergabung denganradar tersebut , maka potensi interaksi EMIdengan spektrum yang lain diperkirakan akan berkurang.
Bentuk gangguan kopling pancaranspurious dari pemancar radar, terjadi ketika out-
of-band atau pancaran energi spurious dari pemancar radar di dalam passband setasiun penerima . Dan bila level pancaran tidakdiinginkan relatif tinggi terhadap sinyal yangdiinginkan , maka terjadi penurunan performance pada penerima. Faktor dominanyang mempengaruhi level pancaran spuriousdari system radar adalah tipe dari peralatan pemancar radar yang digunakan.
Adapun potensi , Pancaran radar spuriousdapat dinyatakan sbb :
L p = (C/I) – C + P T + G T + GR (*) – L T – L R -FDR IF (7)
Dimana :L p : Rugi-rugi saluran propagasi antara
antenna pemancar dan penerima yangdiperlukan untuk menghalangi gangguan dari pancaran radar spurious.(dB).C/I : Carrier to noise ratio pada output IF yangdiperlukan untuk mendapatkan criteria performance.(dB).C : Level sinyal carrier yang diterima padaantenna stasiun bumi.PT : daya peak dari pemancar radar(dBm).GT : Gain antenna main beam dariradar.(dBi)
GR (*) : Gain antenna di bumi dengan arah daristasiun radar.LT : Insertion Loss dalam stasiun pemancarradar (dB).LR : Insertion Loss dalam stasiun penerima(dB ).FDR IF : Frequency-dependent rejection dari pancaran yang tidak diingini .radar
:
6. Kesimpulan
Potensi Electromagnetic Interference dari
sinyal radar spurious , bila tidak dikendalikanmaka frekuensi gelombang elektromagnetikyang dimiliki radar tersebut akan mempengaruhikondisi lingkunganFaktor-faktor yang mempengaruhi level pancaran spurious dari sistim radar adalah tipekeluaran sinyal dari transmitter yang digunakan.
7. Daftar Pustaka
[1] Violette, J.L.N., White, D.R.J., Violette,
M.F., “Electromagnetic Compatibility
Jakarta, 18 – 19 April 2007 29

8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 38/156
ProsidingSeminar Radar Nasional 2007
Handbook”, Van Nostrand Reinhold
Company, New York, 1987.[4] David K. Barton., ” Radar System
Analysis“,Artect House Inc., New York,1979.[2] Paul, C.R., “Introduction to Electro-
magnetic Compatibility“, John Wiley &Sons Inc., New York, 1992.
[5] Tim Williams., “EMC For ProductDesigners“, Newness, Oxford, 1996.
[6] Mark A Richards,. “Fundamental of RadarSignal Processing”, Mc Graw – Hill 2005.
[3] Kraus, J.D., Fleisch, Daniel, A.F.,“Electromagnetic with Applications”McGraw-Hill, Boston, 1999.
Jakarta, 18 – 19 April 2007 30
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 39/156
ProsidingSeminar Radar Nasional 2007
Perancangan Antena Mikrostrip Linear Tapered Slot Bentuk V dengan
Pencatu CPW untuk Aplikasi Radar
Fitri Yuli Zulkifli1, Bayu Aji2 and Eko Tjipto Rahardjo3
ANTENNA PROPAGATION AND MICROWAVE RESEARCH GROUP (AMRG)
CENTER FOR INFORMATION AND COMMUNICATION ENGINEERING RESEARCH (CICER)Department of Electrical Engineering, University of Indonesia
Kampus Baru UI Depok, West Java,16424, [email protected]
Abstract
In this paper, a modified and compact design of V-Shaped Linear Tapered Slot Antenna (V-LTSA) with theCoplanar Waveguide (CPW) Feeding for radar application is proposed. This antenna design has an impedancebandwidth of over 4 GHz.
Keyword s: V-LTSA, Radar
Abstrak
Makalah ini memaparkan sebuah rancangan yang kompak dari antena mikrostrip Linear Tapered Slotberbentuk V dengan teknik pencatuan CPW untuk aplikasi Radar. Perancangan antena ini menghasilkan lebar pitalebih dari 4 GHz.
Kata kunci: V-LTSA, Radar
1. Pendahuluan
Kebutuhan akan perangkat antena yang bentuknya kecil, ringan, mudah dibawa (praktis)semakin menarik dewasa ini. Antena mikrostripmempunyai karakteristik yang memenuhikebutuhan tersebut namun mempunyaikelemahan yaitu memiliki lebar pita yang sempit.Hal ini kini dapat ditanggulangi dengan banyakteknik seperti pemberian slot pada rancanganantenna, salah satunya adalah Teknik Linear Tapered Slot khususnya berbentuk V (V-LTSA = V-Shaped Linear Tapered Slot Antenna)yang mempunyai banyak kelebihan seperti
mampu memiliki pita lebar dan bentuk sangatkompak [1], [2].
Karakterisktik pita lebar kini diminati untuk berbagai aplikasi termasuk untuk aplikasi Radar.Salah satu aplikasi radar adalah Surface
Penetrating Radar yang pada umumnya bekerja pada frekuensi 10 MHz - 5GHz [3]. Bahkanketertarikan kepada ultrawideband radarsemakin meningkat yang berarti perlunya perancangan antena yang berkarakteristik pitalebar dan memenuhi unjuk kerja yangdibutuhkan tersebut.
Perancangan V-LTSA pada penelitian initidak lepas dari keinginan untuk memenuhi
kebutuhan aplikasi radar akan antena yang berkarakteristik pita lebar. Penelitian in didasari
penelitian yang telah dilakukan oleh [2], [4] dan[5]. Penelitian [2] merupakan V-LTSA yangmenggunakan teknik pencatu uniplanar
microstrip-to-coplanar strip line yang desainnyalebih kompleks. Pada [3], pencatu yangdigunakan CPW namun rancangan antena bukan
Linear Tapered Slot bentuk V. yangmenghasilkan pita lebar namun rancangan masihrumit. Penelitian [5] juga menggunakan Linear
Tapered Slot namun memiliki lebar pita dari3,15 GHz – 5,6 GHz.
Penggunaan tekinik pencatuan CPW banyak
menarik perhatian peneliti karena kelebihannya berupa radiation loss yang rendah, dispersi yanglebih sedikit, mudah diintegrasikan denganMicrowave Integrated Circuits (MMIC) danlebih mudah untuk diatur impedansi matchingantena. Dari kelebihan teknik pencatuan CPWini, maka rancangan antena pada penelitian iniakan menggunakan teknik CPW.
Penelitian ini ingin merancang V-LTSAyang lebih sederhana bentuknya dibandingkan[2] dan [4] dan memiliki lebar pita yang lebihlebar dari [5]. Antena ini dirancang untuk
bekerja pada frekuensi sekitar 1,5 GHz – 6 GHz.
Jakarta, 18 – 19 April 2007 31

8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 40/156
ProsidingSeminar Radar Nasional 2007
2. Teori Dasar
A. V-LTSAV-LTSA merupakan pengembangan dari
LTSA yang ditujukan untuk mempermudah
packaging dari aplikasi MMIC. V-LTSA dapatdimodelkan dengan metode spectral domain [6].Metode ini didasarkan atas fungsi Green’s danmetode momen dalam spectral domain. Hal inidilakukan untuk mendapatkan koefisien refleksidan aliran listrik yang tidak terduga di dalamantena. Dalam pemodelan ini, seluruh domaintraveling wave digunakan untukmerepresentasikan arus insiden dan reflektifyang terjadi sepanjang line feeding antena. Jikatraveling waves pada antena merambat searahsumbu x, maka berdasarkan definisi dari
spectral domain exact Green’s function, kitamendapatkan rumus [6] :
dengan G
xx, Gxy, Gyx, Gyy = Green’s Function Jinc = Arus Listrik InsidenJref = Arus Listrik ReflektifJx, Jy = Komponen x,y dari Arus
Listrik Keluar antena
Semua parameter di atas berdasarkan spectral domain. Agar metode momen dapat berlaku, maka pada persamaan (1) dan (2) harusditambahkan lagi faktor arus yang tidak terdugayaitu berupa 2 fungsi basis berikut ini [6].
(3)
(4)
),(~
),(~
1
y x
N
n
xnn y x x
s k k f ak k J ∑=
=
),(~
),(~
1
y x
N
n
ynn y x y
s k k f bk k J ∑=
=
dengan N = jumlah dari fungsi basisan, bn = koefisien expansi tidak terdugaf xn (k x,k y), f yn (k x,k y) = fungsi basis dari
spectral domain
B. Pencatuan CPWKinerja antena mikrostrip slot dengan
pencatuan CPW tergantung pada beberapafaktor diantaranya panjang slot (ls), lebar slot
(Ws), lebar saluran CPW (G), dan jarak antarsaluran CPW (W), seperti ditunjukkan padaGambar 1. Matching impedansi antena untuk
mendapatkan besar impedansi karakteristik 50 Ω dilakukan dengan mengatur perbandingan W/G.Pemanjangan panjang slot(ls) akanmenyebabkan frekuensi kerja menurun[7].
ls
Ws
W
G
(1)
Gambar 1: Prinsip kerja pencatuan CPW [7]
Asumsi yang digunakan pada analisis CPWadalah semua interface dari struktur, termasukslot, dapat diganti dengan dinding magnetik.Untuk mempermudah analisis, struktur darisaluran transmisi dapat dibagi dua, yaitu
setengah bagian atas yang berada diatas bagianmetal, dan setengah bagian bawah yang beradadibawah bagian metal. Kapasitansi per unit panjang dari tiap setengah bagian ditentukandengan mentransformasi bagian tersebutmenjadi geometri plat paralel menggunakantransformasi konformal. Nilai kapasitansi iniakan menentukan karakteristik dari saluranCPW. Konfigurasi saluran pencatu CPW yangdigunakan pada percobaan kali ini adalahsaluran CPW dengan ketebalan substrat yangterbatas dan lebar ground yang terbatas seperti
ditunjukkan pada Gambar 2 berikut ini.
(2)
Gambar 2: Konfigurasi CPW yang digunakan
Dari gambar 2, dapat terlihat bahwa :h = Ketebalan substrat (cm)2a = Jarak antar saluran pencatuan CPW (cm)2b = 2 x lebar slot saluran pencatuan CPW + 2a(cm)2Co = Lebar substrat yang dipakai (cm)
Jakarta, 18 – 19 April 2007 32
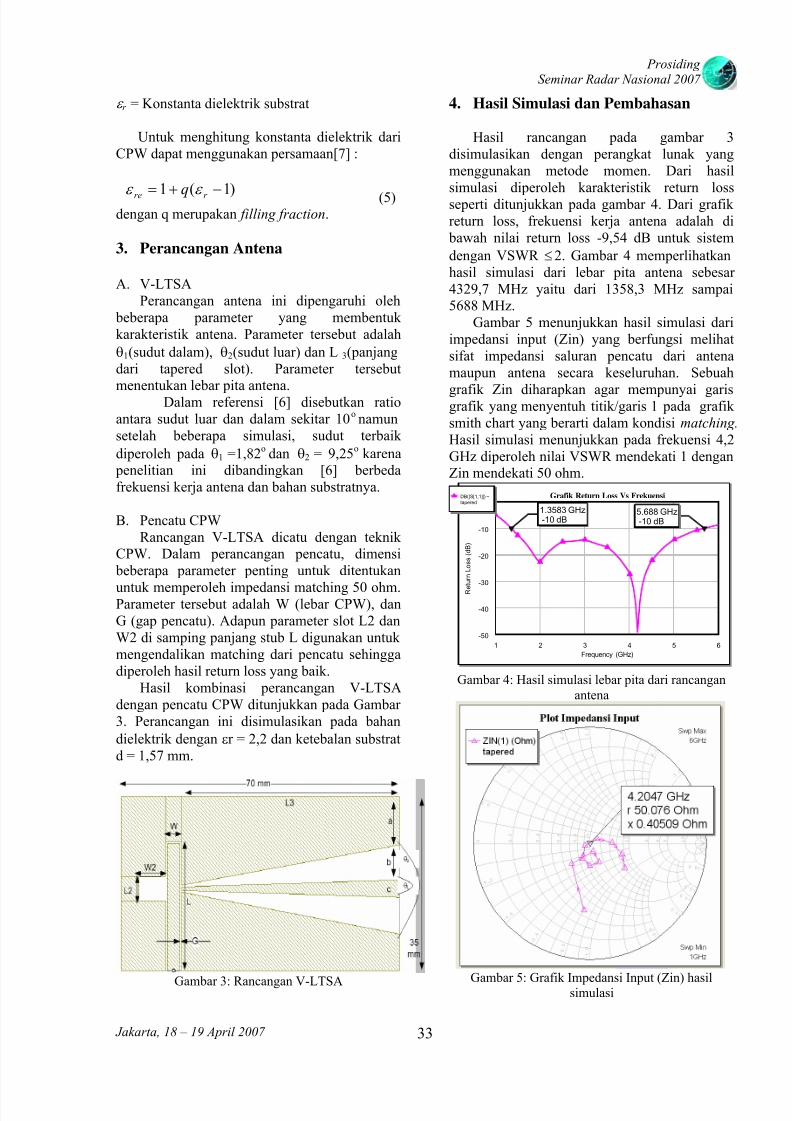
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 41/156
ProsidingSeminar Radar Nasional 2007
ε r = Konstanta dielektrik substrat
Untuk menghitung konstanta dielektrik dariCPW dapat menggunakan persamaan[7] :
)1(1 −+= r re q ε ε (5)dengan q merupakan filling fraction.
3. Perancangan Antena
A. V-LTSAPerancangan antena ini dipengaruhi oleh
beberapa parameter yang membentukkarakteristik antena. Parameter tersebut adalah
θ1 (sudut dalam), θ2 (sudut luar) dan L 3 (panjangdari tapered slot). Parameter tersebut
menentukan lebar pita antena.Dalam referensi [6] disebutkan ratioantara sudut luar dan dalam sekitar 10o namunsetelah beberapa simulasi, sudut terbaik
diperoleh pada θ1 =1,82o dan θ2 = 9,25
okarena
penelitian ini dibandingkan [6] berbedafrekuensi kerja antena dan bahan substratnya.
B. Pencatu CPWRancangan V-LTSA dicatu dengan teknik
CPW. Dalam perancangan pencatu, dimensi beberapa parameter penting untuk ditentukan
untuk memperoleh impedansi matching 50 ohm.Parameter tersebut adalah W (lebar CPW), danG (gap pencatu). Adapun parameter slot L2 danW2 di samping panjang stub L digunakan untukmengendalikan matching dari pencatu sehinggadiperoleh hasil return loss yang baik.
Hasil kombinasi perancangan V-LTSAdengan pencatu CPW ditunjukkan pada Gambar3. Perancangan ini disimulasikan pada bahan
dielektrik dengan εr = 2,2 dan ketebalan substratd = 1,57 mm.
Gambar 3: Rancangan V-LTSA
4. Hasil Simulasi dan Pembahasan
Hasil rancangan pada gambar 3disimulasikan dengan perangkat lunak yangmenggunakan metode momen. Dari hasilsimulasi diperoleh karakteristik return lossseperti ditunjukkan pada gambar 4. Dari grafikreturn loss, frekuensi kerja antena adalah di bawah nilai return loss -9,54 dB untuk sistem
dengan VSWR ≤ 2. Gambar 4 memperlihatkanhasil simulasi dari lebar pita antena sebesar4329,7 MHz yaitu dari 1358,3 MHz sampai5688 MHz.
Gambar 5 menunjukkan hasil simulasi dariimpedansi input (Zin) yang berfungsi melihatsifat impedansi saluran pencatu dari antenamaupun antena secara keseluruhan. Sebuah
grafik Zin diharapkan agar mempunyai garisgrafik yang menyentuh titik/garis 1 pada grafiksmith chart yang berarti dalam kondisi matching. Hasil simulasi menunjukkan pada frekuensi 4,2GHz diperoleh nilai VSWR mendekati 1 denganZin mendekati 50 ohm.
1 2 3 4 5 6
Frequency (GHz)
Grafik Return Loss Vs Frekuensi
-50
-40
-30
-20
-10
0
R e
t u r n L o s s ( d B )
5.688 GHz -10 dB
1.3583 GHz -10 dB
DB(|S[1,1]|) ~tapered
Gambar 4: Hasil simulasi lebar pita dari rancangan
antena
Gambar 5: Grafik Impedansi Input (Zin) hasilsimulasi
Jakarta, 18 – 19 April 2007 33

8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 42/156
ProsidingSeminar Radar Nasional 2007
5. Kesimpulan
Perancangan V-LTSA dengan pencatu CPWdalam makalah ini mempunyai karakteristik pitalebar. Hasil simulasi menunjukkan lebar pitaantena lebih dari 4 GHz. Kemampuan dariantena ini diharapkan dapat digunakan untukaplikasi Radar yang membutuhkan karakteristik pita lebar.
[3] D. J. Daniels, ”Surface Penetrating Radar”,The Institution of Electrical Engineers,London, UK, 1996
[4] Xiao-Dong Wu, Kai Chang, “CoplanarWaveguide Feed Linear Tapered SlotAntenna”, 1993 IEEE Int. Antennas and
Propagat Symp. Dig , page 364-367, vol.1,28 June-2 July 1993.
[5] I.G. Irawan, E.T. Rahardjo,” A Design ofLinearly Tapered Slot Antenna with CPWFeed for Ultra Wideband Application”,Proceeding the 2nd Indonesia Japan JointScientific Symposium, Indonesia, 6-8September 2006
6. Daftar Pustaka
[1] Yngvesson, K.S., Korzeniowski, T.L.,Young-Sik Kim, Kollberg, E.L., Johan-sson,J.F., “The Tapered Slot Antenna – A NewIntegrated Element for Millimeter-WaveApplications”, IEEE Trans. on Antennas
and Propagat., vol. 37, no. 2, Februari 1989.
[6] Wang, H. Y., Mirshekax-Syahkal, D.,Dilworth, I. J., “Numerical Modeling of V-Shaped Linearly Tapered Slot Antennas”
1997 IEEE Int. Antennas and Propagat.Symp. Dig., page 1118 – 1121, IEEE vol.2,13 – 18 July 1997.
[2] Simons,R.N., Dib,N.I., Lee,R.Q., Katehi,L.P.B., “Integrated Uniplanar Transition forLinearly Tapered Slot Antenna”, IEEE
Trans. On Antennas and Propagat., Vol. 43, No 9, September 1995.
[7] Garg, R., Bhartia, P., Bahl, I., Ittipiboon, A.,“ Microstrip Antenna Design Handbook ”,Artech House, Inc., Norwood, MA, 2001.
Jakarta, 18 – 19 April 2007 34

8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 43/156
ProsidingSeminar Radar Nasional 2007
Pendekatan Citra Radar dengan Parameter Time Return dan Power Return
Yusuf Nur Wijayanto*)
*) Pusat Penelitian Elektronika dan Telekomunikasi – LIPIJl. Cisitu 21/ 154D Bandung 40135 Telp. 022 250 4660, 250 4661 Fax. 022 250 4659
Email : [email protected]
Abstract
The modern day, have been developed digital signal processing technique and image processing to supportradar system. In this research have been simulated of radar image processing use Matlab program. In this paper, simulation of radar image processing use time return and power return method as parameter. The parametersobtained with analysis data receive by receiver. The result is value and curve approach of radar image processing
use time return and power return as parameter.
Keywords : Radar image processing, time return, power return
Abstrak
Dewasa ini telah dikembangkan teknik digital signal processing dan image processing untuk mendukung sistem radar. Pada penelitian ini telah dilakukan simulasi pengolahan citra radar menggunakan program Matlab.Simulasi pengolahan citra radar pada makalah ini menggunakan metode time return dan power return sebagai parameter. Parameter tersebut diperoleh dengan manganalisa data yang diterima oleh receiver. Hasil yangdiperoleh berupa nilai dan grafik pendekatan pengolahan citra radar menggunakan parameter time return dan
power return.
Kata kunci : Pengolahan citra radar, time return, power return
1. Pendahuluan
Radar merupakan kepanjangannya adalah Radio Detecting and Ranging . Aplikasi yangtelah banyak digunakan antara lain pada bidangmiliter, mengukur kecepatan, sebagai pengendalilalu-lintas, dan lain-lain[1].
Teknologi radar diawali dengan teorielektromagnetik modern. Pada tahun 1886,Herzt memaparkan tentang pantulan darigelombang radio dan pada tahu 1900, Teslamemaparkan tentang konsep dari deteksielektromagnetik dan pengukuran kecepatan[1].Kemudian dikembangkan oleh banyak ilmuanantara lain Marconi, Taylor and Young. Padatahun 1934 ditemukan continuous wave (CW)dimanfaatkan untuk sistem radar[1]. Dewasa initelah dikembangkan teknologi digital signal
processing (DSP) dan image processing untukmendukung sistem radar. Teknologi ini dapatmemberikan solusi untuk menginterprestasikan bentuk target (benda yang dideteksi) danmenentukkan jenisnya. Aplikasi radar banyakdigunakan dalam berbagai bidang antara lain pada militer, air traffic, kapal laut dan lain
sebagainya.
Dengan mengikuti perkembangan radar penggunakan teknologi infromasi ( software)
baik sebagai DSP maupun image processing ,maka pada makalah ini dipaparkan tentangteknik image processing pada radarmenggunakan program Matlab[6]. Metode yangdigunakan pada pendekatan citra radar dengan parameter time return dan power return.
2. Dasar Teori
Radar merupakan sistem penginderaan jarak jauh yang mampu mendeteksi dan menentukan jarak suatu obyek menggunakan gelombangelektromagnetik. Panjang gelombang yangdigunakan adalah pada spektrum gelombangradio, yang lebar spektrumnya antara 104 kmsampai 1 cm. Sistem radar biasanyamenggunakan panjang gelombang sekitar 10 cmyang sesuai dengan frekuensi sekitar 3 GHz[1,2].
Radar diklasifikasikan berdasarkankegunaanya antara lain sebagai detection,tracking , dan imaging . Dalam makalah iniditekankan radar sebagai detection dan imaging
sehingga teknik akusisi data/ sinyal dan reduksi
interferensi penting dalam sistem ini[1].
Jakarta, 18 – 19 April 2007 35
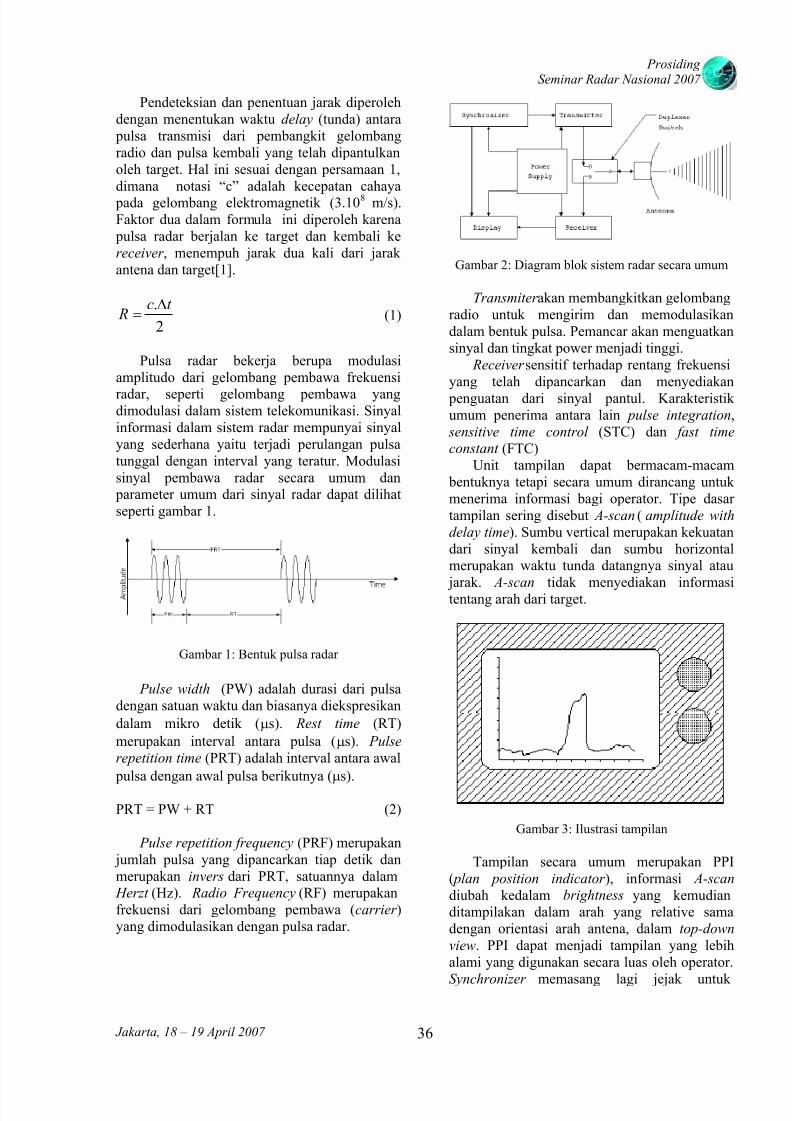
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 44/156
ProsidingSeminar Radar Nasional 2007
Pendeteksian dan penentuan jarak diperolehdengan menentukan waktu delay (tunda) antara pulsa transmisi dari pembangkit gelombangradio dan pulsa kembali yang telah dipantulkanoleh target. Hal ini sesuai dengan persamaan 1,dimana notasi “c” adalah kecepatan cahaya pada gelombang elektromagnetik (3.108 m/s).Faktor dua dalam formula ini diperoleh karena pulsa radar berjalan ke target dan kembali kereceiver , menempuh jarak dua kali dari jarakantena dan target[1].
2
. t c R
∆= (1)
Pulsa radar bekerja berupa modulasi
amplitudo dari gelombang pembawa frekuensi
radar, seperti gelombang pembawa yangdimodulasi dalam sistem telekomunikasi. Sinyalinformasi dalam sistem radar mempunyai sinyalyang sederhana yaitu terjadi perulangan pulsatunggal dengan interval yang teratur. Modulasisinyal pembawa radar secara umum dan parameter umum dari sinyal radar dapat dilihatseperti gambar 1.
Gambar 1: Bentuk pulsa radar
Pulse width (PW) adalah durasi dari pulsadengan satuan waktu dan biasanya diekspresikan
dalam mikro detik (µs). Rest time (RT)
merupakan interval antara pulsa (µs). Pulse
repetition time (PRT) adalah interval antara awal
pulsa dengan awal pulsa berikutnya (µs).
PRT = PW + RT (2)
Pulse repetition frequency (PRF) merupakan jumlah pulsa yang dipancarkan tiap detik danmerupakan invers dari PRT, satuannya dalam
Herzt (Hz). Radio Frequency (RF) merupakanfrekuensi dari gelombang pembawa (carrier )yang dimodulasikan dengan pulsa radar.
Gambar 2: Diagram blok sistem radar secara umum
Transmiter akan membangkitkan gelombangradio untuk mengirim dan memodulasikandalam bentuk pulsa. Pemancar akan menguatkansinyal dan tingkat power menjadi tinggi.
Receiver sensitif terhadap rentang frekuensiyang telah dipancarkan dan menyediakan
penguatan dari sinyal pantul. Karakteristikumum penerima antara lain pulse integration,
sensitive time control (STC) dan fast time
constant (FTC)Unit tampilan dapat bermacam-macam
bentuknya tetapi secara umum dirancang untukmenerima informasi bagi operator. Tipe dasartampilan sering disebut A-scan ( amplitude with
delay time). Sumbu vertical merupakan kekuatandari sinyal kembali dan sumbu horizontalmerupakan waktu tunda datangnya sinyal atau
jarak. A-scan tidak menyediakan informasitentang arah dari target.
Gambar 3: Ilustrasi tampilan
Tampilan secara umum merupakan PPI( plan position indicator ), informasi A-scan diubah kedalam brightness yang kemudianditampilakan dalam arah yang relative samadengan orientasi arah antena, dalam top-down
view. PPI dapat menjadi tampilan yang lebihalami yang digunakan secara luas oleh operator.
Synchronizer memasang lagi jejak untuk
Jakarta, 18 – 19 April 2007 36
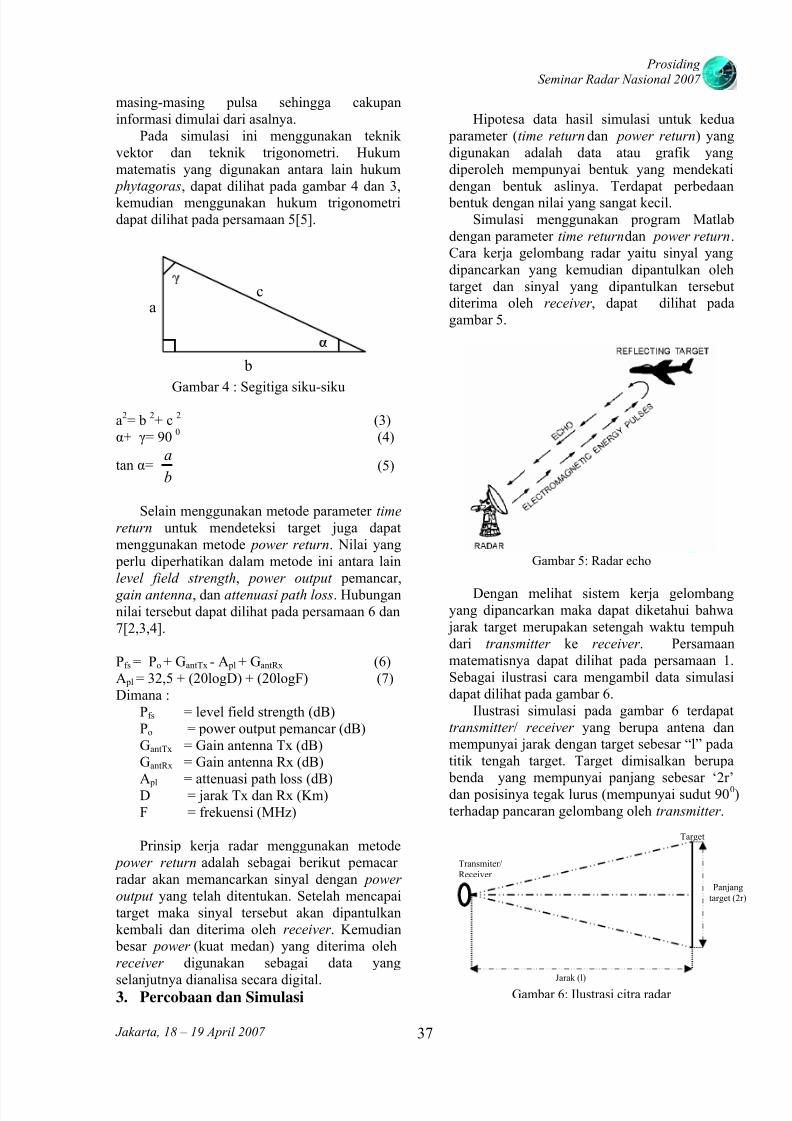
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 45/156
ProsidingSeminar Radar Nasional 2007
masing-masing pulsa sehingga cakupaninformasi dimulai dari asalnya.
Pada simulasi ini menggunakan teknikvektor dan teknik trigonometri. Hukummatematis yang digunakan antara lain hukum
phytagoras, dapat dilihat pada gambar 4 dan 3,kemudian menggunakan hukum trigonometridapat dilihat pada persamaan 5[5].
Gambar 4 : Segitiga siku-siku
a2 = b
2 + c
2 (3)
α + γ = 900
(4)
tan α =b
a (5)
Selain menggunakan metode parameter time
return untuk mendeteksi target juga dapatmenggunakan metode power return. Nilai yang perlu diperhatikan dalam metode ini antara lainlevel field strength, power output pemancar,
gain antenna, dan attenuasi path loss. Hubungannilai tersebut dapat dilihat pada persamaan 6 dan7[2,3,4].
Pfs = Po + GantTx - A pl + GantRx (6)A pl = 32,5 + (20logD) + (20logF) (7)Dimana :
Pfs = level field strength (dB)Po = power output pemancar (dB)GantTx = Gain antenna Tx (dB)GantRx = Gain antenna Rx (dB)
A pl = attenuasi path loss (dB)D = jarak Tx dan Rx (Km)F = frekuensi (MHz)
Prinsip kerja radar menggunakan metode power return adalah sebagai berikut pemacarradar akan memancarkan sinyal dengan power
output yang telah ditentukan. Setelah mencapaitarget maka sinyal tersebut akan dipantulkankembali dan diterima oleh receiver . Kemudian besar power (kuat medan) yang diterima olehreceiver digunakan sebagai data yang
selanjutnya dianalisa secara digital.3. Percobaan dan Simulasi
Hipotesa data hasil simulasi untuk kedua parameter (time return dan power return) yangdigunakan adalah data atau grafik yangdiperoleh mempunyai bentuk yang mendekatidengan bentuk aslinya. Terdapat perbedaan bentuk dengan nilai yang sangat kecil.
Simulasi menggunakan program Matlabdengan parameter time return dan power return.Cara kerja gelombang radar yaitu sinyal yangdipancarkan yang kemudian dipantulkan olehtarget dan sinyal yang dipantulkan tersebutditerima oleh receiver , dapat dilihat padagambar 5.
Gambar 5: Radar echo
Dengan melihat sistem kerja gelombangyang dipancarkan maka dapat diketahui bahwa jarak target merupakan setengah waktu tempuhdari transmitter ke receiver . Persamaanmatematisnya dapat dilihat pada persamaan 1.Sebagai ilustrasi cara mengambil data simulasidapat dilihat pada gambar 6.
Ilustrasi simulasi pada gambar 6 terdapattransmitter / receiver yang berupa antena danmempunyai jarak dengan target sebesar “l” padatitik tengah target. Target dimisalkan berupa benda yang mempunyai panjang sebesar ‘2r’dan posisinya tegak lurus (mempunyai sudut 900)terhadap pancaran gelombang oleh transmitter .
Gambar 6: Ilustrasi citra radar
ca
b
Transmiter/Receiver
Target
Panjangtarget (2r)
Jarak (l)
Jakarta, 18 – 19 April 2007 37

8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 46/156
ProsidingSeminar Radar Nasional 2007
Pengambilan data dilakukan denganmemacarkan gelombang dari transmitter pada pada target dengan sembilan titik yang dibagisama besar dari masing-masing ujung target.Jadi misalkan target mempunyai panjang 9 m,maka besar interval sampling data sebesar 1 m.Dari gambar ilutrasi tersebut di substitusikan pada persamaan 1, maka dapat diperoleh besarnya waktu tempuh sinyal baik kembali kereceiver dan ke target.
Misalkan panjang target 9 m dan jarakantara antena dan titik tengah target sebesar 30Km. Untuk mendapatkan besarnya waktutempuh dari transmitter kembali ke receiver saatdiukur pada posisi tengah target denganmensubstusikan nilai tersebut pada persamaan 1,maka besarnya time return adalah 200 µs.
Gambar 7 : Pengukuran pada ujung target
Kemudian untuk mendapatkan time return
pada salah satu posisi ujung target dapatdigambarkan seperti gambar 7. Untukmendapatkannya dengan mensubstitusikan nilai jarak transmitter dengan ujung target. Nilai jarak ini dapat diperoleh menggunakan hukum phytagoras, sesuai dengan persamaan 3. Jadi
besar jaraknya adalah 30000,000267 m (≅30Km), maka time return yang diperoleh sebesar
200,0000018 µs (≅200 µs).Pada saat menggunakan metode power
return prinsipnya sama dengan metode timereturn. Misalkan jarak target sebesar 30 Km dan
panjang target sebesar 9 m, besar power outputadalah 62,5 dBm, besar gain antena receiver dantransmitter adalah 10 dB, dan besar frekuensiyang dipancarkan adalah 500 MHz. Denganmensubstitusikan nilai tersebut pada persamaan6 dan 7, maka diperoleh besarnya level field
strength yang diterima oleh receiver yangdipantulkan pada posisi tengah target sebesar -39,54202 dBm. Untuk mendapatkan besar
power return pada salah satu ujung dari targetdapat dicari dengan menentukan jarak antaraantena dengan ujung target yang besarnya
30000,000267 m (≅30 Km), maka besar power
return adalah -39,54204 dBm.
Bentuk target lain yang digunakan padasimulasi ini antara lain bidang cekung, cembung,segitiga lancip, dan segitiga tumpul. Ilustrasimasing-masing target dapat dilihat pada gambar8.
Gambar 8: Bentuk target
4. Hasil dan Analisa
Hasil simulasi menggunakan program
Matlab version 7.0.4 untuk pendekatan citraradar dapat dilihat pada grafik gambar 9 dan 10. Nilai grafik ini diambil pada jarak target 30 Kmdan besar target 9 m untuk 5 buah bentuk targetseperti gambar 7 dan 8.
Gambar 9: Grafik simulasi menggunakan parametertime return
Transmiter/Receiver
l
r
Target
L
r
r
r
r
r
r
r
r
(a) (c)
(b) (d)
Jakarta, 18 – 19 April 2007 38
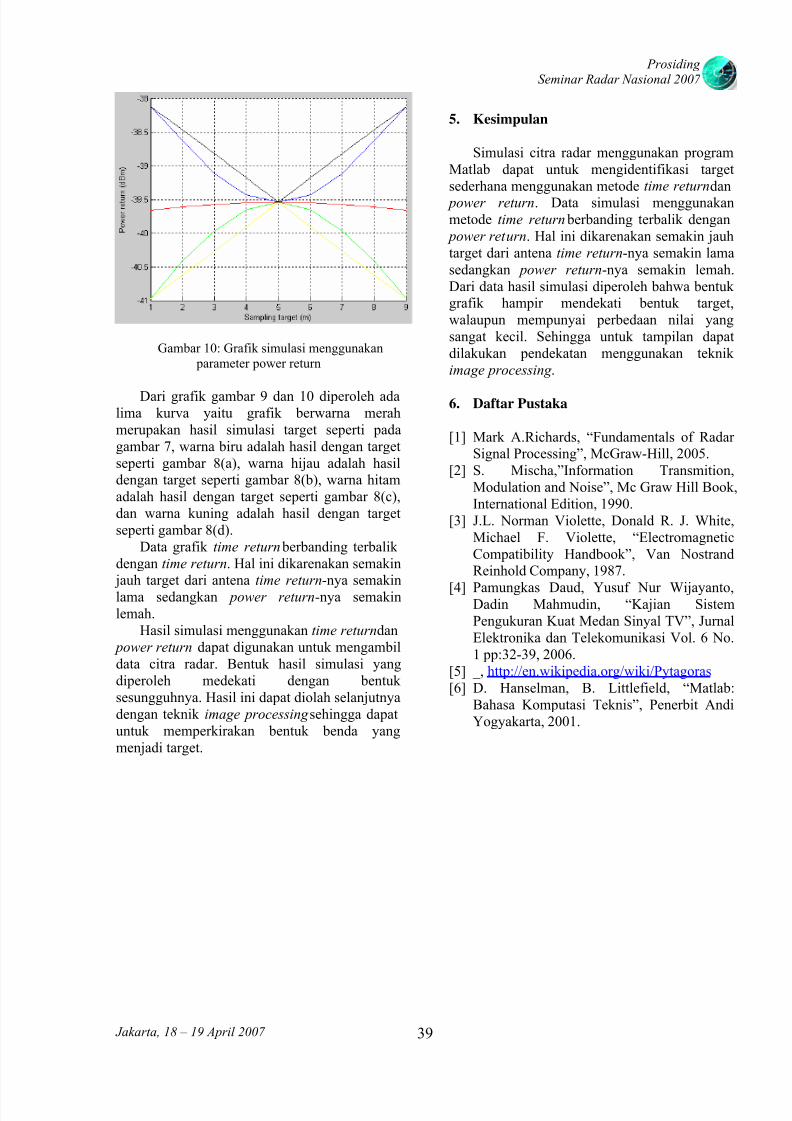
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 47/156
ProsidingSeminar Radar Nasional 2007
5. Kesimpulan
Simulasi citra radar menggunakan programMatlab dapat untuk mengidentifikasi targetsederhana menggunakan metode time return dan
power return. Data simulasi menggunakanmetode time return berbanding terbalik dengan
power return. Hal ini dikarenakan semakin jauhtarget dari antena time return-nya semakin lamasedangkan power return-nya semakin lemah.Dari data hasil simulasi diperoleh bahwa bentukgrafik hampir mendekati bentuk target,walaupun mempunyai perbedaan nilai yangsangat kecil. Sehingga untuk tampilan dapatdilakukan pendekatan menggunakan teknikimage processing .
Gambar 10: Grafik simulasi menggunakan parameter power return
Dari grafik gambar 9 dan 10 diperoleh adalima kurva yaitu grafik berwarna merahmerupakan hasil simulasi target seperti padagambar 7, warna biru adalah hasil dengan targetseperti gambar 8(a), warna hijau adalah hasildengan target seperti gambar 8(b), warna hitamadalah hasil dengan target seperti gambar 8(c),dan warna kuning adalah hasil dengan targetseperti gambar 8(d).
6. Daftar Pustaka
[1] Mark A.Richards, “Fundamentals of RadarSignal Processing”, McGraw-Hill, 2005.
[2] S. Mischa,”Information Transmition,Modulation and Noise”, Mc Graw Hill Book,International Edition, 1990.
[3] J.L. Norman Violette, Donald R. J. White,Michael F. Violette, “ElectromagneticCompatibility Handbook”, Van NostrandReinhold Company, 1987.
Data grafik time return berbanding terbalikdengan time return. Hal ini dikarenakan semakin jauh target dari antena time return-nya semakinlama sedangkan power return-nya semakinlemah.
[4] Pamungkas Daud, Yusuf Nur Wijayanto,Dadin Mahmudin, “Kajian SistemPengukuran Kuat Medan Sinyal TV”, JurnalElektronika dan Telekomunikasi Vol. 6 No.1 pp:32-39, 2006.
Hasil simulasi menggunakan time return dan power return dapat digunakan untuk mengambildata citra radar. Bentuk hasil simulasi yangdiperoleh medekati dengan bentuksesungguhnya. Hasil ini dapat diolah selanjutnyadengan teknik image processing sehingga dapatuntuk memperkirakan bentuk benda yangmenjadi target.
[5] _, http://en.wikipedia.org/wiki/Pytagoras [6] D. Hanselman, B. Littlefield, “Matlab:
Bahasa Komputasi Teknis”, Penerbit AndiYogyakarta, 2001.
Jakarta, 18 – 19 April 2007 39

8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 48/156
ProsidingSeminar Radar Nasional 2007
Ganesha Avionics Air Traffic Control System, Pemanfaatan RADAR
dalam Bidang Pemanduan Lalu Lintas Udara Penerbangan Sipil
Oon Arfiandwi Martyono, Riza Satria Perdana PT LAPI Divusi
Jl Kyai Gede Utama 12, Bandung 40132, IndonesiaPhone: +62 22 2501925 Fax: +62 22 2516752Email: [email protected], [email protected]
Abstrak
Ganesha Avionics adalah sistem lengkap dan optimum untuk pemanduan lalu lintas udara penerbangan sipil
(Air Traffic Control System/ATCS) yang menggunakan RADAR sebagai tulang punggung sumber informasi. Sistemini sarat akan teknologi dan menomor-satukan keselamatan penerbangan.
Di wilayah Indonesia (dengan luas sekitar delapan juta kilo meter persegi) tersebar sejumlah situs RADARdengan tipe, umur perangkat, dan karakteristik yang beragam. Sistem pemanduan lalu lintas udara menggunakan sejumlah RADAR sebagai masukan. Permasalahan yang muncul dari penggunaan RADAR yang beragam adalahantarmuka dan format data RADAR yang beragam pula. Untuk menanggulangi hal tersebut pada Ganesha Avionics
digunakan embedded system Ethernity yang berfungsi sebagai RADAR interface. Pemrosesan Ethernitymenghasilkan data berbasis TCP/IP dengan format yang telah dikonversi berdasarkan standar internasional.
Kesulitan lain yang muncul adalah proses tracking objek yang ditangkap oleh sejumlah RADAR. Sistem yangmenangani sejumlah RADAR harus memiliki kemampuan multi radar tracking, salah satu implementasinya denganmelakukan proses coincide. Proses tersebut berfungsi agar sebuah objek pesawat yang ditangkap oleh sejumlah RADAR dapat dimunculkan hanya sebagai satu objek (bukan sebanyak jumlah RADAR yang menangkapnya).
Semakin banyak RADAR dengan lingkup beririsan akan menyebabkan proses coincide semakin rumit. Sehubungandengan itu, Ganesha Avionics memiliki subsistem Radar Data Processing System (RDPS) yang melakukan multi
radar tracking. RDPS mampu menangani masukan hingga tiga puluh dua RADAR (kurang lebih setara dengan sepuluh ribu
objek pesawat). Tugas lain RDPS dalam pemanduan lalu lintas udara antara lain pemrosesan properti objek pesawat dan perhitungan alert. Pemrosesan properti objek pesawat antara lain: estimasi, filter, prediksi, sertainterpolasi terhadap posisi dan vektor kecepatan pesawat. Perhitungan alert yang dilakukan misalnya Short Term
Conflict Alert, Minimum Safe Altitude Warning, dan Restricted Area Intrusion. Dalam pemrosesan tersebut di atas, RDPS & Ethernity memenuhi aspek pemrosesan waktu nyata (real time processing) dan aspek reliabilitas sebagaihigh-availability software (system).
Pengguna dari sistem pemanduan lalu lintas udara (ATCS) adalah Air Traffic Controller (ATC). Denganbantuan sistem tersebut, ATC dapat meningkatkan efisiensi penggunaan bahan bakar pesawat dan penggunaanarea udara (airspace) oleh pesawat dengan aturan separation minima. ATCS sebagai sistem lengkap memrosesdata RADAR kemudian menampilkannya pada suatu tampilan grafis. Dalam Ganesha Avionics, ATC berinteraksi
langsung dengan subsistem Human Machine Interface (HMI) yang berfungsi sebagai media tampilan grafis danantarmuka penerima perintah/instruksi. HMI mendapatkan data pesawat dari RDPS (setelah melakukan pemrosesan dari sejumlah RADAR). Dalam pengolahan dan pengelolaan data rencana penerbangan, HMIberinteraksi dengan Flight Data Processing System (FDPS). ATCS juga menggunakan sistem surveillance non- RADAR untuk berkomunikasi dengan pesawat melalui lapisan datalink antara sistem pemandu di darat dengan pesawat di udara (Air-Ground Datalink). Dalam komunikasi tersebut HMI berinteraksi dengan Air Ground Data
Processing System (AGDPS).Ganesha Avionics saat ini merupakan produk nasional pertama dan satu-satunya dalam bidang pemanduan
lalu lintas udara penerbangan sipil (Air Traffic Control System/ATCS).
Kata kunci: Ganesha Avionics, pemanduan lalu lintas udara, penerbangan sipil, RADAR, Radar Data ProcessingSystem (RDPS), multi radar tracking, real time software engineering, high-availability software.
Pendahuluan
Indonesia merupakan Negara kepulauanterbesar di dunia yang terbentang antara 6derajat lintang utara sampai 11 derajat lintang
selatan dan 97 – 141 derajat bujur timur [1].Untuk dapat menjangkau wilayah yang luasnya
hampir 8 juta kilo meter persegi tersebut [1],Angkatan Udara Republik Indonesia, DirektoratJenderal Perhubungan Udara, PT(Persero)Angkasa Pura I, dan PT(Persero) Angkasa PuraII bahu-membahu dalam hal menyediakan dan
memanfaatkan Radar yang tersebar di berbagailokasi di Indonesia.
Jakarta, 18 – 19 April 2007 40
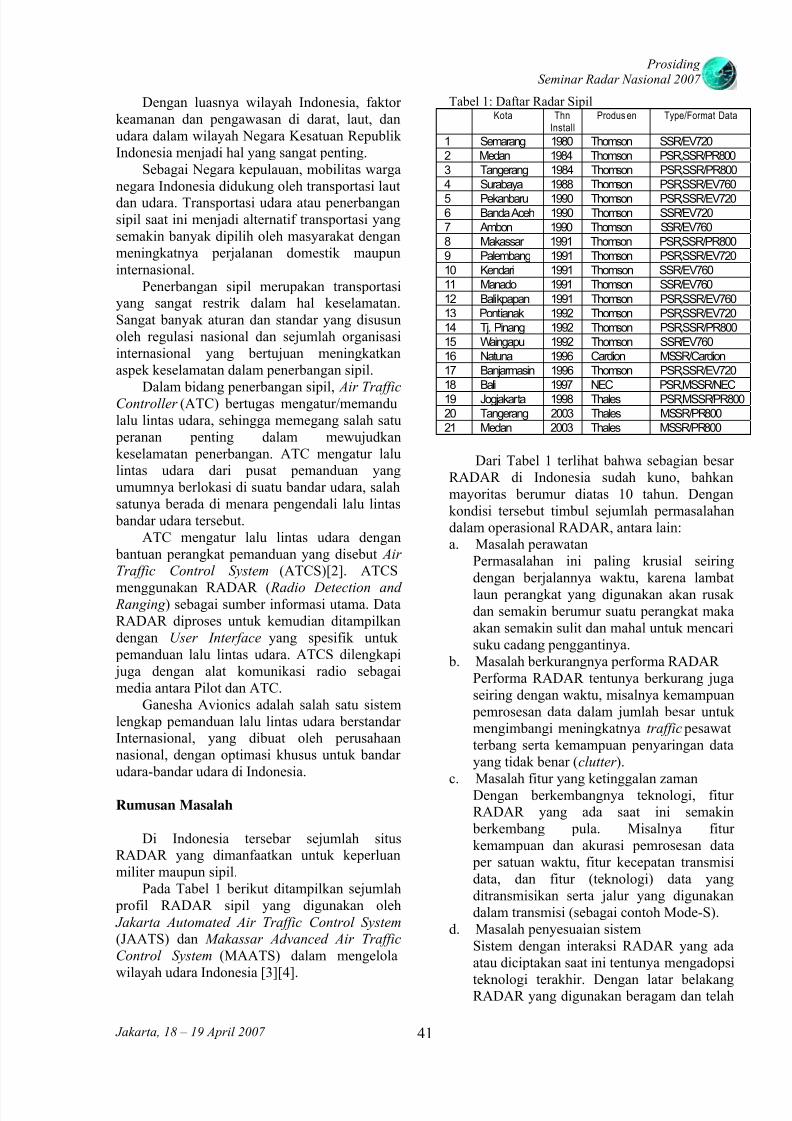
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 49/156
ProsidingSeminar Radar Nasional 2007
Dengan luasnya wilayah Indonesia, faktorkeamanan dan pengawasan di darat, laut, danudara dalam wilayah Negara Kesatuan RepublikIndonesia menjadi hal yang sangat penting.
Sebagai Negara kepulauan, mobilitas warganegara Indonesia didukung oleh transportasi lautdan udara. Transportasi udara atau penerbangansipil saat ini menjadi alternatif transportasi yangsemakin banyak dipilih oleh masyarakat denganmeningkatnya perjalanan domestik maupuninternasional.
Penerbangan sipil merupakan transportasiyang sangat restrik dalam hal keselamatan.Sangat banyak aturan dan standar yang disusunoleh regulasi nasional dan sejumlah organisasiinternasional yang bertujuan meningkatkanaspek keselamatan dalam penerbangan sipil.
Dalam bidang penerbangan sipil, Air TrafficController (ATC) bertugas mengatur/memandulalu lintas udara, sehingga memegang salah satu peranan penting dalam mewujudkankeselamatan penerbangan. ATC mengatur lalulintas udara dari pusat pemanduan yangumumnya berlokasi di suatu bandar udara, salahsatunya berada di menara pengendali lalu lintas bandar udara tersebut.
ATC mengatur lalu lintas udara dengan bantuan perangkat pemanduan yang disebut Air
Traffic Control System (ATCS)[2]. ATCS
menggunakan RADAR ( Radio Detection and Ranging ) sebagai sumber informasi utama. DataRADAR diproses untuk kemudian ditampilkandengan User Interface yang spesifik untuk pemanduan lalu lintas udara. ATCS dilengkapi juga dengan alat komunikasi radio sebagaimedia antara Pilot dan ATC.
Ganesha Avionics adalah salah satu sistemlengkap pemanduan lalu lintas udara berstandarInternasional, yang dibuat oleh perusahaannasional, dengan optimasi khusus untuk bandarudara-bandar udara di Indonesia.
Rumusan Masalah
Di Indonesia tersebar sejumlah situsRADAR yang dimanfaatkan untuk keperluanmiliter maupun sipil.
Pada Tabel 1 berikut ditampilkan sejumlah profil RADAR sipil yang digunakan oleh Jakarta Automated Air Traffic Control System (JAATS) dan Makassar Advanced Air Traffic
Control System (MAATS) dalam mengelolawilayah udara Indonesia [3][4].
Tabel 1: Daftar Radar SipilKota Thn
InstallProdus en Type/Format Data
1 Semarang 1980 Thomson SSR/EV720
2 Medan 1984 Thomson PSR,SSR/PR800
3 Tangerang 1984 Thomson PSR,SSR/PR800
4 Surabaya 1988 Thomson PSR,SSR/EV760
5 Pekanbaru 1990 Thomson PSR,SSR/EV7206 Banda Aceh 1990 Thomson SSR/EV720
7 Ambon 1990 Thomson SSR/EV760
8 Makassar 1991 Thomson PSR,SSR/PR800
9 Palembang 1991 Thomson PSR,SSR/EV720
10 Kendari 1991 Thomson SSR/EV760
11 Manado 1991 Thomson SSR/EV760
12 Balikpapan 1991 Thomson PSR,SSR/EV760
13 Pontianak 1992 Thomson PSR,SSR/EV720
14 Tj. Pinang 1992 Thomson PSR,SSR/PR800
15 Waingapu 1992 Thomson SSR/EV760
16 Natuna 1996 Cardion MSSR/Cardion
17 Banjarmasin 1996 Thomson PSR,SSR/EV720
18 Bali 1997 NEC PSR,MSSR/NEC
19 Jogjakarta 1998 Thales PSR,MSSR/PR800
20 Tangerang 2003 Thales MSSR/PR800
21 Medan 2003 Thales MSSR/PR800
Dari Tabel 1 terlihat bahwa sebagian besarRADAR di Indonesia sudah kuno, bahkanmayoritas berumur diatas 10 tahun. Dengankondisi tersebut timbul sejumlah permasalahandalam operasional RADAR, antara lain:a. Masalah perawatan
Permasalahan ini paling krusial seiringdengan berjalannya waktu, karena lambat
laun perangkat yang digunakan akan rusakdan semakin berumur suatu perangkat makaakan semakin sulit dan mahal untuk mencarisuku cadang penggantinya.
b. Masalah berkurangnya performa RADARPerforma RADAR tentunya berkurang jugaseiring dengan waktu, misalnya kemampuan pemrosesan data dalam jumlah besar untukmengimbangi meningkatnya traffic pesawatterbang serta kemampuan penyaringan datayang tidak benar (clutter ).
c. Masalah fitur yang ketinggalan zamanDengan berkembangnya teknologi, fiturRADAR yang ada saat ini semakin berkembang pula. Misalnya fiturkemampuan dan akurasi pemrosesan data per satuan waktu, fitur kecepatan transmisidata, dan fitur (teknologi) data yangditransmisikan serta jalur yang digunakandalam transmisi (sebagai contoh Mode-S).
d. Masalah penyesuaian sistemSistem dengan interaksi RADAR yang adaatau diciptakan saat ini tentunya mengadopsi
teknologi terakhir. Dengan latar belakangRADAR yang digunakan beragam dan telah
Jakarta, 18 – 19 April 2007 41

8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 50/156
ProsidingSeminar Radar Nasional 2007
berumur mengakibatkan sistem yangdigunakan di Indonesia harus memilikitoleransi dengan berbagai tipe RADARkuno (legacy RADAR system).
Selain problematika operasional RADAR,dalam sistem pemanduan lalu lintas udara (yangnotabene berinteraksi secara langsung denganRADAR) muncul sejumlah permasalahan,antara lain:a. Mayoritas sistem yang menggunakan
RADAR terutama di bidang pemanduan lalulintas udara penerbangan sipil adalah sistem buatan perusahaan luar negeri. Hal iniadalah permasalahan utama bagi perkembangan sistem yang memanfaatkanRADAR di Indonesia, terutama karena efek
dari permasalahan ini menimbulkansejumlah permasalahan lainnya (dijelaskandalam poin berikutnya).
b. Sistem yang dibeli dari luar negericenderung harganya akan meningkat, karenadipengaruhi oleh proses import barang, proses instalasi dan pengujian di lokasi ( site
acceptance test ) oleh ahli dari luar negeri, bahkan proses training serta pengujian di pabrik ( factory acceptance test ) olehsejumlah orang Indonesia ke lokasi pabrik diluar negeri.
c. Belum berakhir di bagian serah terimasistem, ternyata masa pemeliharaan sistemoleh perusahaan luar negeri seringmenempuh masalah. Sistem pemanduan lalulintas udara membutuhkan respon yangcepat jika terjadi masalah (misalnya:ditemukan bugs pada sistem), sedangkan pekerjaan pemeliharaan dilakukan secara jarak jauh (remote) dari luar negeri.Demikian juga mengenai minimnyadukungan oleh perusahaan nasional terhadap perangkat keras yang digunakan (misalnya
komputer). Setelah proses pemeliharaan berakhir, belum tentu telah terjadi transfer
of knowledge pada pihak yangmengoperasikan sistem.
d. Setelah sistem operasional, kadang munculkebutuhan penambahan fitur (baru atauupgrade). Ternyata harga dari penambahanfitur oleh perusahaan luar negeri tidaklahmurah, bahkan tidak sedikit yang sehargasatu buah sistem baru.
Disisi lain, pemilik dan pengguna RADARyang ada di Indonesia tidak dapat begitu sajamengganti RADAR dan sistem yang
menggunakan RADAR dengan yang baru,karena transisi perpindahannya akanmembutuhkan usaha yang besar. Proses transisi bukan hanya semata-mata dipandang dari segiteknis dalam melakukan perpindahan sistem,tetapi transisi dari segi sumber daya manusia bahkan membutuhkan usaha yang lebih besar.Proses alih teknologi dan peningkatan kualitassumber daya manusia harus menjadi konsentrasiyang tidak kalah penting bagi pihak pemilik dan pengguna RADAR di Indonesia. Suatu contohyang sederhana adalah mayoritas RADAR
Processor yang saat ini berbasis komputer,sedangkan sumber daya manusia dari penggunasistem tersebut masih sangat minim dalam pengetahuan dan pemanfaatan komputer.
Analisis dan Pembahasan
Didasari dari permasalahan yang muncul dilingkungan operasional pemanfaatan RADARdan pertimbangan keadaan bangsa Indonesiasaat ini, tidak mungkin hanya mengandalkan produk dan solusi dari luar negeri. Untukmengatasi permasalahan tersebut, seharusnyadilakukan proses rekayasa (engineering ) oleh perusahaan nasional dalam menghasilkan sistemlengkap yang dapat memenuhi kebutuhanoperasional pemanfaatan RADAR di bidang
pemanduan lalu lintas udara penerbangan sipil.Solusi dari sebagian besar permasalahan
tersebut adalah produk Ganesha Avionics.Ganesha Avionics adalah sistem lengkap danoptimum untuk pemanduan lalu lintas udara penerbangan sipil. Ganesha Avionics merupakan produk dari perusahaan nasional.
Sebagai sistem lengkap, Ganesha Avionicsterdiri dari sejumlah subsistem pendukung yangterintegrasi, antara lain:1. Ethernity Radar Connector
Ethernity merupakan perangkat embedded
antarmuka Ganesha Avionics dengan RADAR.Sebagai antarmuka, Ethernity memiliki tigafungsi utama, antara lain: pengubah protokolkomunikasi data RADAR, pengubah format dataRADAR, dan media penganalisis data RADAR.
Yang dimaksud sebagai pengubah protokolkomunikasi data RADAR adalah melakukankonversi dari synchronous serial (sebagai protokol yang mayoritas digunakan olehRADAR) menjadi TCP/IP (Transport Control
Protocol/Internet Protocol ), ataupun proseskonversi sebaliknya dari TCP/IP menjadi
synchronous serial .
Jakarta, 18 – 19 April 2007 42
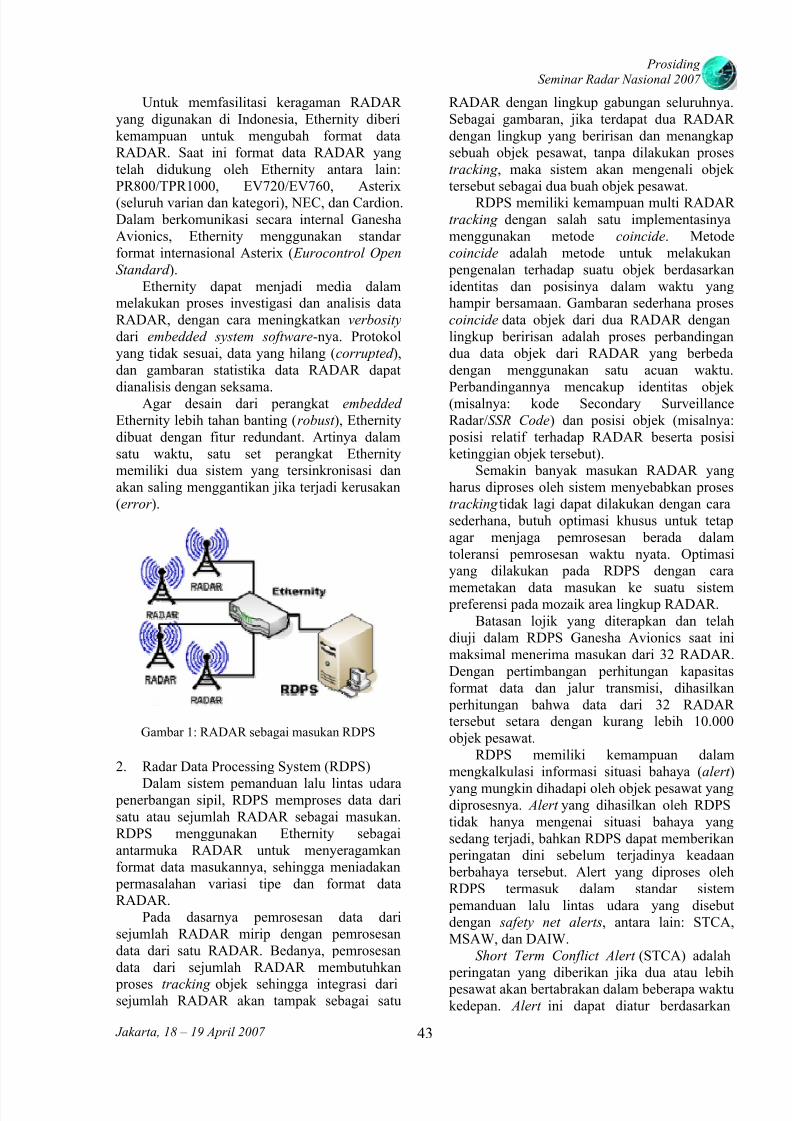
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 51/156
ProsidingSeminar Radar Nasional 2007
Untuk memfasilitasi keragaman RADARyang digunakan di Indonesia, Ethernity diberikemampuan untuk mengubah format dataRADAR. Saat ini format data RADAR yangtelah didukung oleh Ethernity antara lain:PR800/TPR1000, EV720/EV760, Asterix(seluruh varian dan kategori), NEC, dan Cardion.Dalam berkomunikasi secara internal GaneshaAvionics, Ethernity menggunakan standarformat internasional Asterix ( Eurocontrol Open
Standard ).Ethernity dapat menjadi media dalam
melakukan proses investigasi dan analisis dataRADAR, dengan cara meningkatkan verbosity dari embedded system software-nya. Protokolyang tidak sesuai, data yang hilang (corrupted ),dan gambaran statistika data RADAR dapat
dianalisis dengan seksama.Agar desain dari perangkat embedded Ethernity lebih tahan banting (robust ), Ethernitydibuat dengan fitur redundant. Artinya dalamsatu waktu, satu set perangkat Ethernitymemiliki dua sistem yang tersinkronisasi danakan saling menggantikan jika terjadi kerusakan(error ).
Gambar 1: RADAR sebagai masukan RDPS
2. Radar Data Processing System (RDPS)
Dalam sistem pemanduan lalu lintas udara penerbangan sipil, RDPS memproses data darisatu atau sejumlah RADAR sebagai masukan.RDPS menggunakan Ethernity sebagaiantarmuka RADAR untuk menyeragamkanformat data masukannya, sehingga meniadakan permasalahan variasi tipe dan format dataRADAR.
Pada dasarnya pemrosesan data darisejumlah RADAR mirip dengan pemrosesandata dari satu RADAR. Bedanya, pemrosesandata dari sejumlah RADAR membutuhkan
proses tracking objek sehingga integrasi darisejumlah RADAR akan tampak sebagai satu
RADAR dengan lingkup gabungan seluruhnya.Sebagai gambaran, jika terdapat dua RADARdengan lingkup yang beririsan dan menangkapsebuah objek pesawat, tanpa dilakukan prosestracking , maka sistem akan mengenali objektersebut sebagai dua buah objek pesawat.
RDPS memiliki kemampuan multi RADARtracking dengan salah satu implementasinyamenggunakan metode coincide. Metodecoincide adalah metode untuk melakukan pengenalan terhadap suatu objek berdasarkanidentitas dan posisinya dalam waktu yanghampir bersamaan. Gambaran sederhana prosescoincide data objek dari dua RADAR denganlingkup beririsan adalah proses perbandingandua data objek dari RADAR yang berbedadengan menggunakan satu acuan waktu.
Perbandingannya mencakup identitas objek(misalnya: kode Secondary SurveillanceRadar/SSR Code) dan posisi objek (misalnya: posisi relatif terhadap RADAR beserta posisiketinggian objek tersebut).
Semakin banyak masukan RADAR yangharus diproses oleh sistem menyebabkan prosestracking tidak lagi dapat dilakukan dengan carasederhana, butuh optimasi khusus untuk tetapagar menjaga pemrosesan berada dalamtoleransi pemrosesan waktu nyata. Optimasiyang dilakukan pada RDPS dengan cara
memetakan data masukan ke suatu sistem preferensi pada mozaik area lingkup RADAR.
Batasan lojik yang diterapkan dan telahdiuji dalam RDPS Ganesha Avionics saat inimaksimal menerima masukan dari 32 RADAR.Dengan pertimbangan perhitungan kapasitasformat data dan jalur transmisi, dihasilkan perhitungan bahwa data dari 32 RADARtersebut setara dengan kurang lebih 10.000objek pesawat.
RDPS memiliki kemampuan dalammengkalkulasi informasi situasi bahaya (alert )
yang mungkin dihadapi oleh objek pesawat yangdiprosesnya. Alert yang dihasilkan oleh RDPStidak hanya mengenai situasi bahaya yangsedang terjadi, bahkan RDPS dapat memberikan peringatan dini sebelum terjadinya keadaan berbahaya tersebut. Alert yang diproses olehRDPS termasuk dalam standar sistem pemanduan lalu lintas udara yang disebutdengan safety net alerts, antara lain: STCA,MSAW, dan DAIW.
Short Term Conflict Alert (STCA) adalah peringatan yang diberikan jika dua atau lebih pesawat akan bertabrakan dalam beberapa waktukedepan. Alert ini dapat diatur berdasarkan
Jakarta, 18 – 19 April 2007 43

8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 52/156
ProsidingSeminar Radar Nasional 2007
waktu sebelum pesawat bertabrakan untukmemberikan peringatan dini.
Minimum Safe Altitude Warning (MSAW)adalah peringatan yang diberikan oleh sistem jika suatu pesawat terbang dengan ketinggian di bawah ketinggian minimum yang ditetapkan pada area dimana pesawat tersebut terbang.Alert ini dapat diatur berdasarkan waktusebelum pesawat mencapai area dan ketinggianyang tidak diperbolehkan, misalnya di areatersebut terdapat gunung atau bangunan tinggi.
Danger Area Infringement Warning (DAIW)adalah peringatan yang diberikan oleh sistem jika suatu pesawat terbang memasuki areawilayah udara yang terlarang, misalnya area peperangan atau area latihan militer.
Selain mengkalkulasi alert , RDPS memiliki
fungsi untuk memproses properti objek pesawat,antara lain: posisi pesawat relatif terhadapRADAR, ketinggian relatif pesawat, vektor(arah dan besaran) kecepatan pesawat, informasistatus dan kualitas data dari objek yangdiinformasikan oleh RADAR.
Pemrosesan properti objek ada yanglangsung dapat dimanfaatkan untuk kebutuhan pengendalian lalu lintas udara dan ada juga yangmembutuhkan pemrosesan lebih lanjut. Contohdata yang diproses lebih lanjut adalah data posisi pesawat dan vektor kecepatan untuk mengurangi
nilai error data yang diterima dari satu atausejumlah RADAR. Pemrosesan data tersebutmenggunakan perhitungan matematis metodeKalman atau Bayesian. Metode tersebutmelakukan estimasi, filter, prediksi, daninterpolasi ( smoothing ) yang bertujuan untukmenekan nilai error , memberikan koreksi, sertamengatasi data pencilan [5][6][7][8].
Sebagai contoh digunakan perhitungan besaran kecepatan pesawat relatif terhadap posisi di darat ( ground speed ). Untuk suatu pesawat yang berada dalam keadaan jelajah
(cruising ) seharusnya besaran kecepatan pesawat relatif stabil, sedangkan data yangdihasilkan oleh RADAR berfluktuasi. Prosesfilter dan estimasi dapat mengkalkulasikecepatan pesawat sehingga menghasilkan datadengan minimum error . Data yang telahdiproses digunakan sebagai keluaran dari RDPS,sehingga bersesuaian dengan data kenyataannya.
Gambar 2: Sistem Secara Global
3. Human Machine Interface (HMI)HMI adalah subsistem user interface/
tampilan grafis dari Ganesha Avionics yang berinteraksi secara langsung dengan pengguna
(dalam hal ini Air Traffic Controller/ATC).ATC menggunakan HMI yang telah dipadukandengan sistem komunikasi radio (antara ATCdan Pilot) untuk memberikan instruksi dan perintah dalam memandu lalu lintas udara.
HMI diciptakan untuk mengakomodasikebutuhan spesifik pemanduan lalu lintas udara,antara lain: tampilan situasi udara dilengkapidengan sistem filter, tampilan alert , antarmuka pemrosesan rencana penerbangan, sistemkoordinat relatif RADAR dan sistem koordinat bumi, menu map categories, menu handoff ,
menu sehubungan pesawat (advanced label ,track history, velocity vector ), dan menu situasiudara (range bearing , range center , range ring ).
Seluruh interaksi yang dilakukan oleh ATC pada HMI akan terekam dan tersimpan padamedia yang tersentralisasi. Rekaman interaksiini dapat diputar ulang ( playback ) untukmelakukan investigasi jika terjadi suatu event tertentu (misalnya: kecelakaan pesawat terbang).
Pemanduan lalu lintas udara menggunakansistem dengan sumber informasi dari RADARakan meningkatkan efisiensi penggunaan bahan
bakar pesawat dan area udara (airspace) melalui pemanfaatan aturan separation minima.4. Flight Data Processing System (FDPS)
FDPS adalah sistem pengelolaan datarencana penerbangan ( flight data) yangtersinkronisasi dengan sistem surveillance(RDPS dan AGDPS) dan berkomunikasi melalui
Aeronautical Fixed Telecommunication Network (AFTN) antar unit penyedia layanan penerbangan ( Air Traffic Services/ATS).
FDPS melakukan sejumlah pemrosesan data penerbangan antara lain: simulasi penerbangan berdasarkan riil performa pesawat serta simulasi
Jakarta, 18 – 19 April 2007 44
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 53/156
ProsidingSeminar Radar Nasional 2007
5. Tim Pengembang Ganesha Avionics AirTraffic Control System: Hananto Widhi S.,Puspa Indahati S., M. Octamanullah, Iwan A.Lubis, Herman Setiawan, Arie Minandar,Budiono, dan E. Erinda E.
pemodelan bentuk bumi dan wilayah udarasesuai standar internasional.5. Air Ground Data Processing System
Air Ground Data Processing System(AGDPS) adalah sistem pemroses data
surveillance yang menggunakan komunikasimelalui lapisan datalink antara sistem di pesawatdengan sistem pengendali di darat ( Air-Ground
Datalink ).AGDPS memproses Automatic Dependent
Surveillance-Broadcast (ADS-B) dan ADS-Contract (ADS-C) Controller Pilot Data LinkCommunication (CPDLC).
Daftar Referensi
[1] Departemen Komunikasi dan Informatika,“Profil Indonesia”, (2005), Portal NasionalRepublik Indonesia. Diakses tanggal 16Maret 2007, darihttp://www.indonesia.go.id/index.php/content/view/112/336/.
Kesimpulan [2] Nolan, Michael S., “Fundamentals of AirTraffic Control”, Thomson Brooks/Cole,Belmont, California, USA. 2004.Pemanfaatan RADAR di bidang pemanduan
lalu lintas udara di Indonesia dapatmeningkatkan efisiensi penggunaan bahan bakardan pemanfaatan area udara (airspace) seiringdengan meningkatnya traffic penerbangan sipil.
[3] Data konfigurasi (adaptation) JakartaAutomated Air Traffic System (JAATS).Diakses tanggal 21 Maret 2007.
[4] Data konfigurasi (adaptation) MakassarAdvanced Air Traffic System (MAATS).Diakses tanggal 21 Maret 2007.
Ganesha Avionics adalah produk dari perusahaan nasional yang menjadi solusimenyeluruh dari permasalahan yang muncul dilingkungan operasional pengguna RADAR diIndonesia, termasuk juga peningkatan kualitassumber daya manusia pengguna sistemnya.
[5] Brookner, Eli, “Tracking and KalmanFiltering Made Easy”, John Wiley & Sons,Canada. 1998.
[6] Gelb, Arthur, “Applied OptimalEstimation”, The MIT Press, USA. 1974.Alih teknologi di bidang pemanfaatan
RADAR dan sistem pengendalian lalu lintas
udara dapat lebih banyak diserap dandiimplementasikan di Indonesia jika apresiasiterhadap produk nasional lebih ditingkatkan.
[7] Wikimedia Foundation, Inc., “Kalman
Filter”, (2007), Kalman Filter – Wikipedia,the free encyclopedia. Diakses tanggal 16Maret 2007, darihttp://en.wikipedia.org/wiki/Kalman_filter.
Ucapan Terima Kasih [8] Wikimedia Foundation, Inc., “RecursiveBayesian Estimation”, (2007), RecursiveBayesian Estimation – Wikipedia, the freeencyclopedia. Diakses tanggal 16 Maret2007, dari http://en.wikipedia.org/wiki/Recursive_Bayesian_estimation.
Segala puji dan syukur hanya kepada AllahSWT sehingga penulis dapat menyelesaikanmakalah untuk Seminar Radar Nasional.
Penulis juga menyampaikan terima kasihkepada semua pihak yang telah membantu, yaitukepada:
[9] Liem, Inggriani. “Modul Reliability”,Program Magister Informatika Bidang
Khusus Rekayasa Perangkat LunakWaktu-Nyata Institut Teknologi Bandung,Bandung, Indonesia. 1999.
1. Bapak Adi Mulyanto, Direktur Utama PTLAPI Divusi.
2. Ibu Dr. Ir. M.M. Inggriani Liem, SekolahTeknik Elektronika & Informatika, sebagaireviewer makalah.
[10] Pusat Data dan Informasi DepartemenPerhubungan Republik Indonesia,“Departemen Perhubungan RepublikIndonesia”, (2005), Portal DepartemenPerhubungan Republik Indonesia. Diaksestanggal 18 Maret 2007, darihttp://www.dephub.go.id/.
3. Bapak Wiyono, ATC System Specialist,Bandara Internasional Soekarno – HattaJakarta.
4. Bapak Nur Djadmiko, PTO Dinas TeknikOtomasi, Bandara Internasional HasanuddinMakassar. [11] Skolnik, Merrill I., “Introduction to Radar
Systems”, McGraw-Hill, Singapore. 2001.
Jakarta, 18 – 19 April 2007 45

8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 54/156
ProsidingSeminar Radar Nasional 2007
A Novel Ultra Wide Band (UWB) Antenna
for Monostatic Microwave Radar(MMR)
Rudy Yuwono*)
*)Electrical Departement, Engineering Faculty, University of Brawijaya
Jl Haryono 167 Malang. 65145.Phone:0062-341-554166 Fax:0062-341-551430. Email:[email protected]
Abstract
Ultra wide-band (UWB) technology is revolutionary wireless wideband communication to provide more information
and higher data rates which very low power. Wideband antenna is essential for providing wireless wide bandcommunications The proposed wide band antenna was rugby-ball antenna with various dimension and material.The name rugby-ball is taken due the shape is similar to the ball used in rugby sport. Through simulation andexperiment, the rugby-ball antenna was designed. In this paper, the material used for antenna fabrication was
Aluminums. The performed simulation and measurement confirmed that the proposed antenna is considered to beultra wideband antenna. This antenna could radiate pulse of Monostatic Microwave Radar(MMR) having full width
half maximum (FWHM) of 150 ps and t r of 100 ps.
Keywords : Ultra wide-band (UWB) Antenna, Monostatic Microwave Radar(MMR)
Introduction
The starting point of UWB technology is1960 with the development of time-domainelectromagnetic. It characterizes the behavior oftransient of certain class of microwave throughimpulse response instead of swept frequency
response. So that the linear time invariant (LTI)could be fully characterized by its impulseresponse h(t). In particular, the output y(t) ofsystem which has any arbitrary input x(t) could be determined by the convolution integral [1]:
Hewlet-Packard (1962) introduced thesampling oscilloscope for measuring subnanosecond pulse generation of impulseresponse for microwave networks. So that thedevelopment of the very short electrical pulses(sub-nanosecond) for ultra wide band (UWB)can be determined and measured. Thistechnology was also referred to base band,carrier-free or impulse radio, and carrier less.The term of “Ultra Wide Band (UWB)” wasintroduced by U.S.A`s department of defenses in1989.
UWB is series of very short electrical pulses (sub-nanosecond) that all exist allfrequency simultaneously, not only in particular
frequency. UWB technology is revolutionarywireless wideband communication to provide
more information and higher data rates whichvery low power.
Wideband antenna is essential for providing wireless wide band communicationsthat has percent of Bandwidth ( Bpc) more than25% and ratio of Bandwidth ( Br ) more than 1:3any of these devices
needs low profile features, linear polarizationand unidirectional pattern in compact size.However, the exciting wideband antenna areelectrically large and provide single circular polarization [2]
∞
−= ut xuht y )()()( Monostatic Microwave Radar (MMR) System
UWB monostatic radar system consist ofan electrical pulse generator for pico-second pulse generation and UWB antenna to transmitand receive these pulses. The electrical pulsegenerator should generate short pulses, generally
with sub nano-second temporal widths, as a basic signal structure rather than generating andmodulating a sinusoidal carrier. On the receiverside, a time domain sampler or digitizer should be used to detect these signal [3].
The antenna in UWB system is very essential.In the previous development of UWB radar wasUWB bistatic microwave radar. Current research ison UWB monostatic microwave radar as shown inFig. 1. The changing from bistatic to monostatic is possible by employing directional coupler. Thissystem will be efficient in space and weight and so
that the radar become more portable.
Jakarta, 18 – 19 April 2007 46
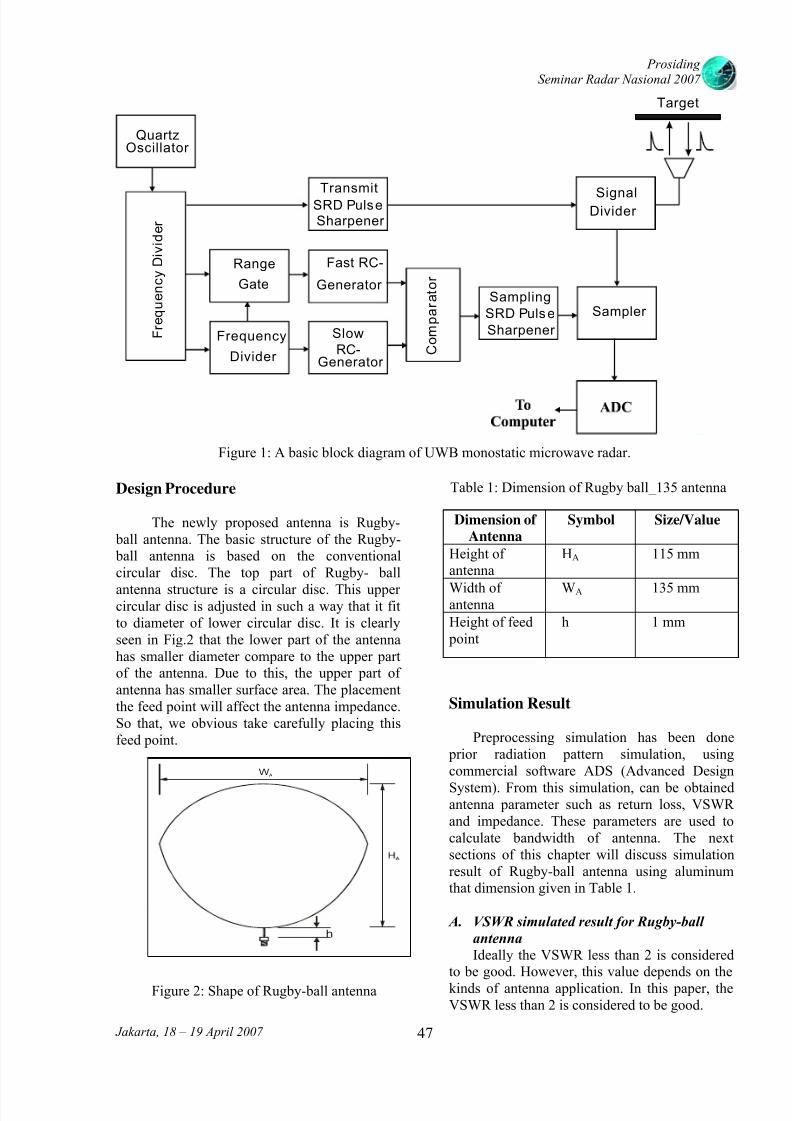
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 55/156
ProsidingSeminar Radar Nasional 2007
QuartzOscillator
Transmit
SRD PulseSharpener
Frequency
Divider
Fast RC-
Generator
Slow
RC-Generator
C o m p a r a t o r
Sampling
SRD Pulse
Sharpener
Sampler
Target
SignalDivider
Range
Gate
F r e q u e n c y D i v i d e r
Figure 1: A basic block diagram of UWB monostatic microwave radar.
Design Procedure
W A
h
The newly proposed antenna is Rugby-
ball antenna. The basic structure of the Rugby-
ball antenna is based on the conventional
circular disc. The top part of Rugby- ball
antenna structure is a circular disc. This uppercircular disc is adjusted in such a way that it fit
to diameter of lower circular disc. It is clearly
seen in Fig.2 that the lower part of the antenna
has smaller diameter compare to the upper part
of the antenna. Due to this, the upper part of
antenna has smaller surface area. The placement
the feed point will affect the antenna impedance.
So that, we obvious take carefully placing this
feed point.
Figure 2: Shape of Rugby-ball antenna
Table 1: Dimension of Rugby ball_135 antenna
Dimension of
Antenna
Symbol Size/Value
Height of
antenna
HA 115 mm
Width ofantenna
WA 135 mm
Height of feed
point
h 1 mm
Simulation Result
Preprocessing simulation has been done
prior radiation pattern simulation, using
commercial software ADS (Advanced Design
System). From this simulation, can be obtainedantenna parameter such as return loss, VSWR
and impedance. These parameters are used to
calculate bandwidth of antenna. The next
sections of this chapter will discuss simulation
result of Rugby-ball antenna using aluminum
that dimension given in Table 1.
A. VSWR simulated result for Rugby-ball
antenna
Ideally the VSWR less than 2 is considered
to be good. However, this value depends on the
kinds of antenna application. In this paper, the
VSWR less than 2 is considered to be good.
Jakarta, 18 – 19 April 2007 47
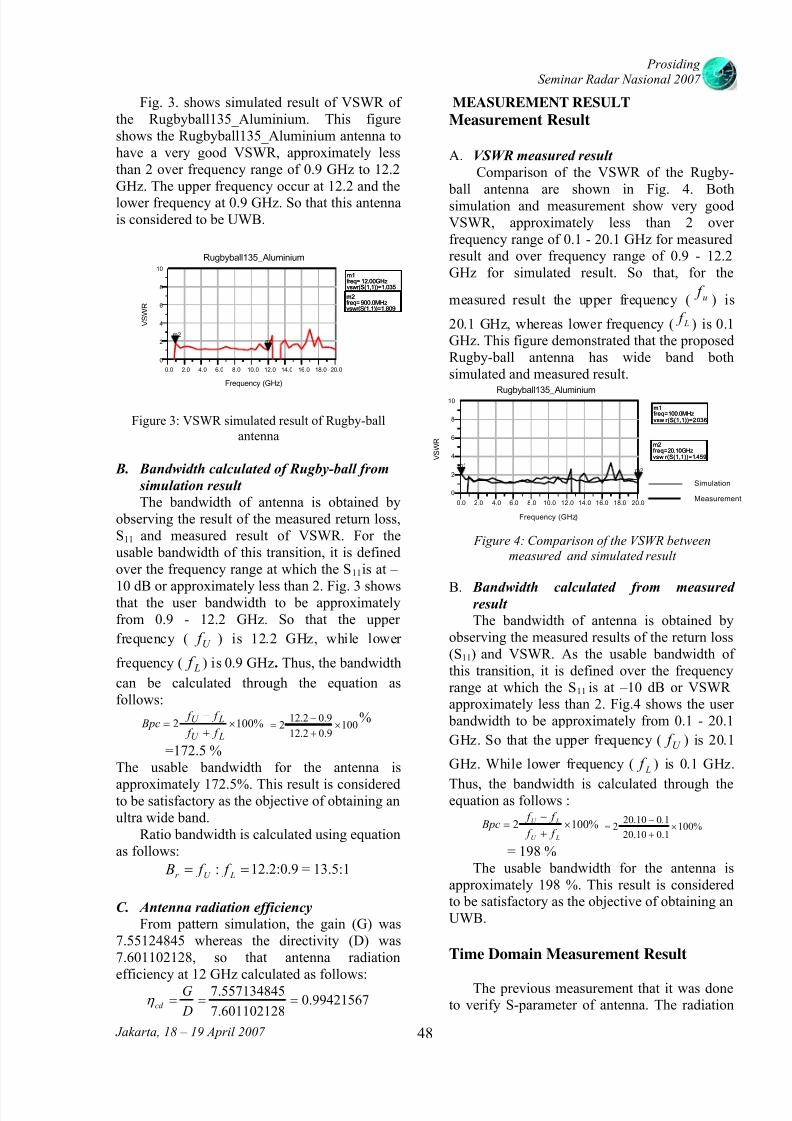
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 56/156
ProsidingSeminar Radar Nasional 2007
Fig. 3. shows simulated result of VSWR ofthe Rugbyball135_Aluminium. This figureshows the Rugbyball135_Aluminium antenna tohave a very good VSWR, approximately lessthan 2 over frequency range of 0.9 GHz to 12.2GHz. The upper frequency occur at 12.2 and thelower frequency at 0.9 GHz. So that this antennais considered to be UWB.
m1freq=vswr(S(1,1))=1.035
12.00GHz
m2freq=vswr(S(1,1))=1.809
900.0MHz
m1freq=vswr(S(1,1))=1.035
12.00GHz
m2freq=vswr(S(1,1))=1.809
900.0MHz
2.0 4.0 6.0 8.0 10.0 12.0 14.0 16.0 18.00.0 20.0
2
4
6
8
0
10
Frequency (GHz)
V S W R
m1m2
Rugbyball135_Aluminium
Figure 3: VSWR simulated result of Rugby-ball
antenna
B. Bandwidth calculated of Rugby-ball from
simulation result
The bandwidth of antenna is obtained byobserving the result of the measured return loss,S11 and measured result of VSWR. For theusable bandwidth of this transition, it is definedover the frequency range at which the S11 is at –
10 dB or approximately less than 2. Fig. 3 showsthat the user bandwidth to be approximatelyfrom 0.9 - 12.2 GHz. So that the upper
frequency ( ) is 12.2 GHz, while lower
frequency ( ) is 0.9 GHz. Thus, the bandwidth
can be calculated through the equation asfollows:
U f
L f
%1002 ×+
−=
LU
LU
f f
f f Bpc 100
9.02.12
9.02.122 ×
+−
=%
=172.5 %The usable bandwidth for the antenna is
approximately 172.5%. This result is consideredto be satisfactory as the objective of obtaining anultra wide band.
Ratio bandwidth is calculated using equationas follows:
== LU r f f B : 12.2:0.9 = 13.5:1
C.
Antenna radiation efficiency
From pattern simulation, the gain (G) was7.55124845 whereas the directivity (D) was7.601102128, so that antenna radiationefficiency at 12 GHz calculated as follows:
0.99421567601102128.7
557134845.7===
D
Gcd
η
MEASUREMENT RESULT
Measurement Result
A. VSWR measured result
Comparison of the VSWR of the Rugby-
ball antenna are shown in Fig. 4. Bothsimulation and measurement show very goodVSWR, approximately less than 2 overfrequency range of 0.1 - 20.1 GHz for measuredresult and over frequency range of 0.9 - 12.2GHz for simulated result. So that, for the
measured result the upper frequency ( ) is
20.1 GHz, whereas lower frequency ( ) is 0.1GHz. This figure demonstrated that the proposedRugby-ball antenna has wide band bothsimulated and measured result.
u f
L f
m1freq=vsw r(S(1,1))=2.036
100.0MHz
m2freq=vsw r(S(1,1))=1.459
20.10GHz
m1freq=vsw r(S(1,1))=2.036
100.0MHz
m2freq=vsw r(S(1,1))=1.459
20.10GHz
2.0 4.0 6.0 8.0 10.0 12.0 14.0 16.0 18.00.0 20.0
Figure 4: Comparison of the VSWR betweenmeasured and simulated result
B. Bandwidth calculated from measuredresult
The bandwidth of antenna is obtained byobserving the measured results of the return loss(S11) and VSWR. As the usable bandwidth ofthis transition, it is defined over the frequencyrange at which the S11 is at –10 dB or VSWRapproximately less than 2. Fig.4 shows the user bandwidth to be approximately from 0.1 - 20.1
GHz. So that the upper frequency ( ) is 20.1
GHz. While lower frequency ( ) is 0.1 GHz.
Thus, the bandwidth is calculated through theequation as follows :
U f
L f
%1002 ×+
−=
LU
LU
f f
f f Bpc %100
1.010.20
1.010.202 ×
+
−=
= 198 %The usable bandwidth for the antenna is
approximately 198 %. This result is consideredto be satisfactory as the objective of obtaining anUWB.
Time Domain Measurement Result
The previous measurement that it was doneto verify S-parameter of antenna. The radiation
2
4
6
8
0
10
Frequency (GHz)
V S W R
m1m2
Rugbyball135_Aluminium
Simulation
Measurement
Jakarta, 18 – 19 April 2007 48
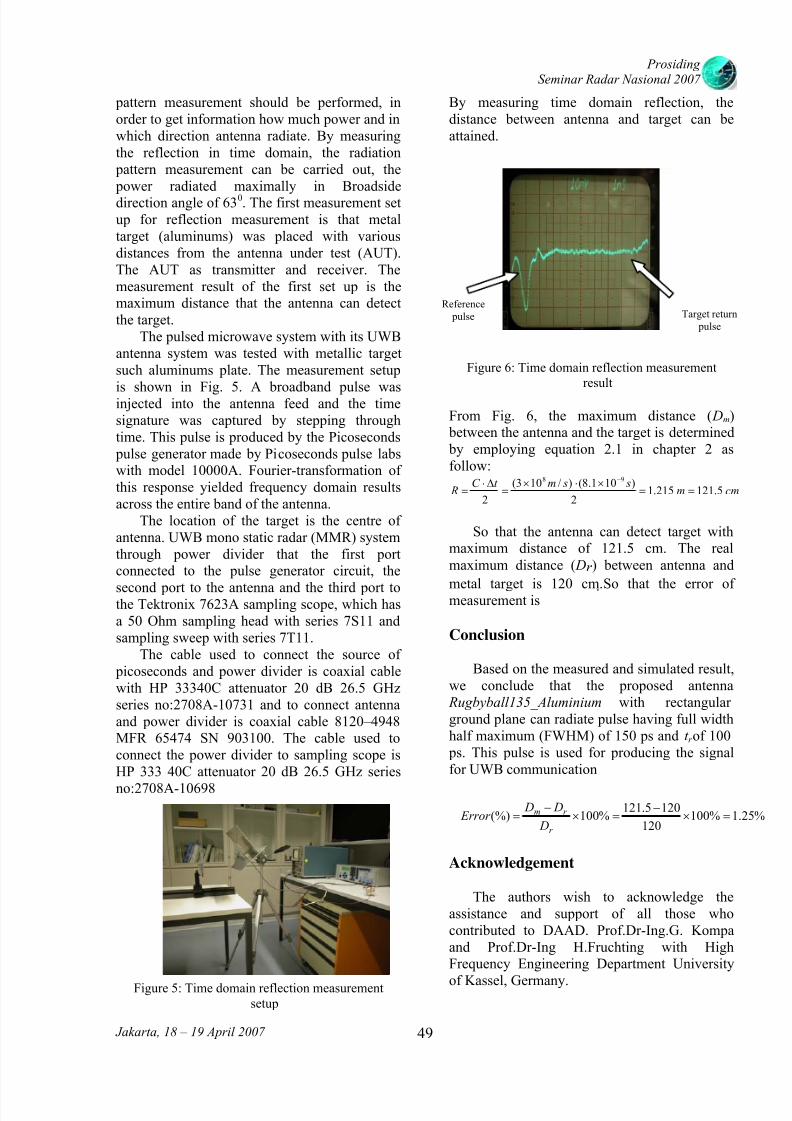
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 57/156
ProsidingSeminar Radar Nasional 2007
pattern measurement should be performed, inorder to get information how much power and inwhich direction antenna radiate. By measuringthe reflection in time domain, the radiation pattern measurement can be carried out, the power radiated maximally in Broadsidedirection angle of 630. The first measurement setup for reflection measurement is that metaltarget (aluminums) was placed with variousdistances from the antenna under test (AUT).The AUT as transmitter and receiver. Themeasurement result of the first set up is themaximum distance that the antenna can detectthe target.
The pulsed microwave system with its UWBantenna system was tested with metallic targetsuch aluminums plate. The measurement setup
is shown in Fig. 5. A broadband pulse wasinjected into the antenna feed and the timesignature was captured by stepping throughtime. This pulse is produced by the Picoseconds pulse generator made by Picoseconds pulse labswith model 10000A. Fourier-transformation ofthis response yielded frequency domain resultsacross the entire band of the antenna.
The location of the target is the centre ofantenna. UWB mono static radar (MMR) systemthrough power divider that the first portconnected to the pulse generator circuit, the
second port to the antenna and the third port tothe Tektronix 7623A sampling scope, which hasa 50 Ohm sampling head with series 7S11 andsampling sweep with series 7T11.
The cable used to connect the source of picoseconds and power divider is coaxial cablewith HP 33340C attenuator 20 dB 26.5 GHzseries no:2708A-10731 and to connect antennaand power divider is coaxial cable 8120–4948MFR 65474 SN 903100. The cable used toconnect the power divider to sampling scope isHP 333 40C attenuator 20 dB 26.5 GHz series
no:2708A-10698
Figure 5: Time domain reflection measurementsetup
By measuring time domain reflection, thedistance between antenna and target can beattained.
Reference pulse Target return
pulse
Figure 6: Time domain reflection measurementresult
From Fig. 6, the maximum distance ( Dm) between the antenna and the target is determined by employing equation 2.1 in chapter 2 asfollow:
cmm s smt C
R 5.121215.12
)101.8()/103(
2
98
==×⋅×
=∆⋅
=−
So that the antenna can detect target with
maximum distance of 121.5 cm. The realmaximum distance ( Dr ) between antenna and
metal target is 120 cm. So that the error ofmeasurement is
Conclusion
Based on the measured and simulated result,we conclude that the proposed antenna
Rugbyball135_Aluminium with rectangularground plane can radiate pulse having full widthhalf maximum (FWHM) of 150 ps and t r of 100 ps. This pulse is used for producing the signalfor UWB communication
%25.1%100120
1205.121%100(%) =×
−=×
−=
r
r m
D
D D Error
Acknowledgement
The authors wish to acknowledge theassistance and support of all those whocontributed to DAAD. Prof.Dr-Ing.G. Kompaand Prof.Dr-Ing H.Fruchting with HighFrequency Engineering Department University
of Kassel, Germany.
Jakarta, 18 – 19 April 2007 49
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 58/156
ProsidingSeminar Radar Nasional 2007
References [10] D. Chatterje, “The ConvergenceConsideration in Space-Domain Moment-Method Analysis of a Class of Wide-BandMicrostrip Antennas,” IEEE transactions
on Antennas and Propagation, Vol. 48, No. 2, February 2000, pp.147-160.
[1] K.Y. Lai, A.L. Sinipoli, and W.D.Burnside, “A novel antenna for ultra wide band application,” IEEE transactions on
Antennas and Propagation, Vol. 40, July1992, pp. 755-760.[2] J.R Andrews,“ Picosecond Pulse
Generator for UWB Radars”, PicosecondPulse Labs,Colorado,http://www.picosecond.com , 2001
[11] M.A Gonzales de Aza, J. Zapata, and J.A.Encinar, “Broadband Cavity-Backed andCapacitvely Probe Microstrip PatchArrays,” IEEE transactions on Antennas
and Propagation, Vol. 48, No. 5, May2000, pp. 784-789.[3] A. Duzdar, “ Design and Modelling of an
UWB Antenna for pulsed Microwave
Radar Sensor ”, Ph.D Disertation, KasselUniversität, 2001.
[12] J.H. Lu, C.L. Tang, and K.L. Wong,“Single Feed Slotted Equilateral-Triangular Microstrip Antenna forCircular Polarization,” IEEE transactions
on Antennas and Propagation, Vol. 47,
No. 7, July 1999, pp. 1174-1178.
[4] D.M. Pozar, “ Microwave Engineering ”,second Edition, John Wiley and Sons Inc.,
Massachuset, 1998. [13] G.P. Gauthier, A. Courtay, and G.M.Rebeiz, “Microstrip Antennas onSynthesized Low Dielectric Dielectric-Constant Substrate,” IEEE transactions on
Antennas and Propagation, Vol. 45, No. 8,August 1997, pp. 1310-1311.
[5] R.E. Collin, “ Foundations for microwave
Engineering ”, second edition, Mc Graw-Hill International, 1992.
[6] G. Kompa, “ Microwave and
Milimeterwave ”, Department of HighFrequency Engineering, Kassel University,2003. [14] S. Weigand, G.H. Huff, K.H. Pann, and
J.T. Bernhard, “Analysis and Design ofBroadband Single-Layer Microstrip PatchAntennas,” IEEE transactions on
Antennas and Propagation, Vol. 51, No. 3,
August 2003, pp. 457-466.
[7] C.A. Balanis, “ Antenna Theory: Analysis
and Design ”, John Willey and Sons, NewYork, 1997.
[8] W.L Stutzman and G.A Thiele, “ Antenna
Theory and Design ”, John Willey andSons, New York, 1998. [15] R. Rajaraman, “ Design of Vivaldi Antenna
Array For the Snow Radar ”, MasterThesis, Kansas University, 2004.
[9] S.Y. Suh, “ A Comprehensive Investigation
New Planar Wideband Antennas”, Ph.DDisertation, Virginia Polytechnic Instituteand State University, 2002.
[16] J.J Paul, “Wide Band Linearly TaperedSlot Antenna”, Bachelor Thesis,Queensland University, 2004.
Jakarta, 18 – 19 April 2007 50

8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 59/156
ProsidingSeminar Radar Nasional 2007
Prinsip-Prinsip Dasar dan Pertimbangan Desain dari Radar Penembus
Permukaan dengan Teknik Sintesa Frekuensi (SFCW-GPR)
Andriyan B. Suksmono, Adya Pramudita, Endon Bharata, A. Andaya Lestari, Nana Rachmana
Sekolah Teknik Elektro dan Informatika
IRCTR-Indonesia BranchInstitut Teknologi Bandung, Jl. Ganesha No. 10 Bandung, IndonesiaPhone: +62-22-2501661, Fax:+62-22-2534133, email: [email protected]
Abstract
This paper describes basic principles and design considerations of SFCW-GPR (Stepped Frequency Continuous
Wave-Ground Penetrating Radar). Fourier relation between time domain and frequency domain representation ofan impulse is used as a fundamental principle in deriving parameters of the radar. This relationship also implies signal processing algorithm and signal synthesis performance. A simple homodyne SFCW-GPR is used as anexample. Performance on various uniform frequency-sampling scenarios is simulated and discussed.
Keywords: radar imaging, Fourier transform, SFCW-GPR, frequency sampling, homodyne system
Abstrak
Makalah ini menjelaskan prinsip-prinsip dasar dan pertimbangan-pertimbangan yang perlu diperhatikan dalam
mendesain radar penembus tanah yang menggunakan teknik sintesa frekuensi (SFCW-GPR/ Stepped FrequencyContinuous Wave-Ground Penetrating Radar). Hubungan impuls dalam kawasan waktu dan kawasan frekuensi
melalui teorema Fourier dipakai sebagai dasar dalam menentukan besaran-besaran penting dalam system radar.Teorema ini sekaligus menentukan algoritma dan kinerja dari pengolahan sinyal GPR. Sebagai contoh disajikandan dianalisis sistem SFCW-GPR sederhana yang memakai teknik homodyne. Kinerja berbagai skenario pencuplikan-frekuensi seragam disimulasikan dan hasilnya dianalisis.
Kata kunci: pencitraan radar, transformasi Fourier, radar pensintesa frekuensi, pencuplikan frekuensi, system
homodyne
1. Pendahuluan
Radar penembus permukaan (GPR/Ground
Penetrating Radar ) adalah suatu alat pencitragelombang elektromagnetik yang mampumelihat benda-benda di bawah permukaan tanah.Desain GPR sangat bergantung pada tujuanaplikasi. Spesifikasi GPR untuk mencitra objek bawah tanah yang dalam (mis. air) akan berbedadengan yang akan dipakai untuk melihat objek
dekat permukaan (mis. ranjau). Demikian pula, persyaratan resolusi citra hasil yang dikehendaki juga akan mempengaruhi desain.
Pada prinsipnya ada dua macam teknologi pancaran radiasi EM yang biasa dipakai dalamGPR, yaitu teknik pancaran impuls dan teknik pemancaran gelombang kontinyu. Makalah ini berfokus pada GPR jenis kedua, yakni radardengan teknik SFCW (Stepped-Frequency
Continuous Wave). Untuk kepentingan praktistertentu yang memerlukan resolusi tinggi, maka pulsa (efektif) yang diperlukan juga harus sangatsingkat (dalam orde sub-nano detik). Sumber pulsa yang demikian sangat sulit dicari, mahal
dan memerlukan penguat dengan persyaratanyang tidak sederhana. Masalah ini dapat diatasidengan teknik SFCW, meskipun akanmengakibatkan peningkatan waktu pengolahan.Teknik multipleksing ruang-frekuensi, dimanasecara serempak beberapa frekuensi dapatdipancarkan pada beberapa titik koordinatspasial sekaligus dapat mengatasi permasalahankecepatan pencitraan.
Penguasaan teknologi ini akan
meningkatkan kemampuan Indonesia dalammenguasai teknologi GPR pada khususnya, danteknologi radar pada umumnya karena secara prinsip teknologinya sama seperti pada radarlainnya (radar cuaca, radar surveilance dst).
2. Prinsip Kerja dan Geometri
Pencitraan GPR
Citra benda yang diperoleh sistem radar pada dasarnya merupakan sekumpulan pantulan
gelombang sebagai fungsi dari posisi. Untuksebuah radar ideal, kita bisa menganggap pulsa
radar sebagai suatu fungsi delta Dirac δ (t ),
Jakarta, 18 – 19 April 2007 51
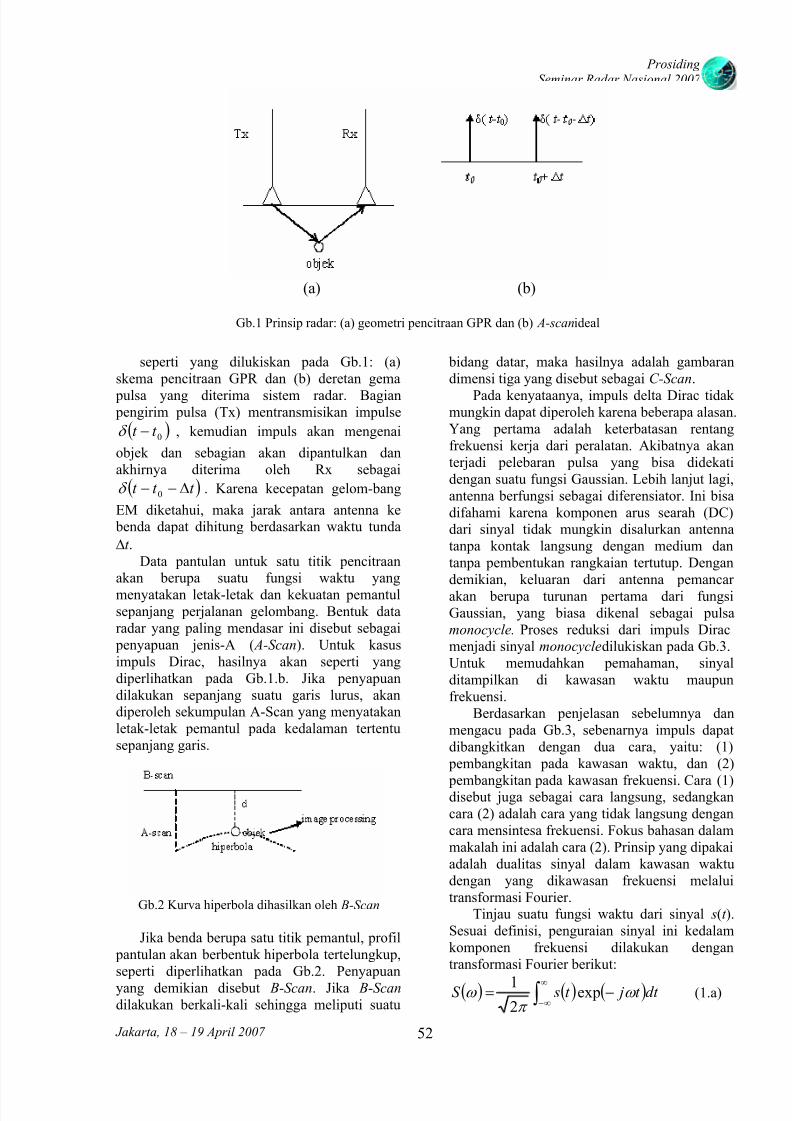
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 60/156
ProsidingSeminar Radar Nasional 2007
seperti yang dilukiskan pada Gb.1: (a)skema pencitraan GPR dan (b) deretan gema
pulsa yang diterima sistem radar. Bagian pengirim pulsa (Tx) mentransmisikan impulse
( 0t t − )δ , kemudian impuls akan mengenai
objek dan sebagian akan dipantulkan danakhirnya diterima oleh Rx sebagai
( t t t ∆−− 0 )δ . Karena kecepatan gelom-bang
EM diketahui, maka jarak antara antenna ke benda dapat dihitung berdasarkan waktu tunda
∆t .Data pantulan untuk satu titik pencitraan
akan berupa suatu fungsi waktu yang
menyatakan letak-letak dan kekuatan pemantulsepanjang perjalanan gelombang. Bentuk dataradar yang paling mendasar ini disebut sebagai penyapuan jenis-A ( A-Scan). Untuk kasusimpuls Dirac, hasilnya akan seperti yangdiperlihatkan pada Gb.1.b. Jika penyapuandilakukan sepanjang suatu garis lurus, akandiperoleh sekumpulan A-Scan yang menyatakanletak-letak pemantul pada kedalaman tertentusepanjang garis.
Gb.2 Kurva hiperbola dihasilkan oleh B-Scan
Jika benda berupa satu titik pemantul, profil pantulan akan berbentuk hiperbola tertelungkup,seperti diperlihatkan pada Gb.2. Penyapuanyang demikian disebut B-Scan. Jika B-Scan dilakukan berkali-kali sehingga meliputi suatu
bidang datar, maka hasilnya adalah gambarandimensi tiga yang disebut sebagai C-Scan.
(a) (b)
Gb.1 Prinsip radar: (a) geometri pencitraan GPR dan (b) A-scan ideal
Pada kenyataanya, impuls delta Dirac tidakmungkin dapat diperoleh karena beberapa alasan.Yang pertama adalah keterbatasan rentangfrekuensi kerja dari peralatan. Akibatnya akanterjadi pelebaran pulsa yang bisa didekatidengan suatu fungsi Gaussian. Lebih lanjut lagi,antenna berfungsi sebagai diferensiator. Ini bisadifahami karena komponen arus searah (DC)dari sinyal tidak mungkin disalurkan antennatanpa kontak langsung dengan medium dantanpa pembentukan rangkaian tertutup. Dengandemikian, keluaran dari antenna pemancarakan berupa turunan pertama dari fungsiGaussian, yang biasa dikenal sebagai pulsamonocycle. Proses reduksi dari impuls Diracmenjadi sinyal monocycle dilukiskan pada Gb.3.Untuk memudahkan pemahaman, sinyalditampilkan di kawasan waktu maupunfrekuensi.
Berdasarkan penjelasan sebelumnya danmengacu pada Gb.3, sebenarnya impuls dapatdibangkitkan dengan dua cara, yaitu: (1) pembangkitan pada kawasan waktu, dan (2)
pembangkitan pada kawasan frekuensi. Cara (1)disebut juga sebagai cara langsung, sedangkancara (2) adalah cara yang tidak langsung dengancara mensintesa frekuensi. Fokus bahasan dalammakalah ini adalah cara (2). Prinsip yang dipakaiadalah dualitas sinyal dalam kawasan waktudengan yang dikawasan frekuensi melaluitransformasi Fourier.
Tinjau suatu fungsi waktu dari sinyal s(t ).Sesuai definisi, penguraian sinyal ini kedalamkomponen frekuensi dilakukan dengantransformasi Fourier berikut:
( ) ( ) ( )∫∞
∞−−= dt t jt sS ω
π ω exp
21 (1.a)
Jakarta, 18 – 19 April 2007 52
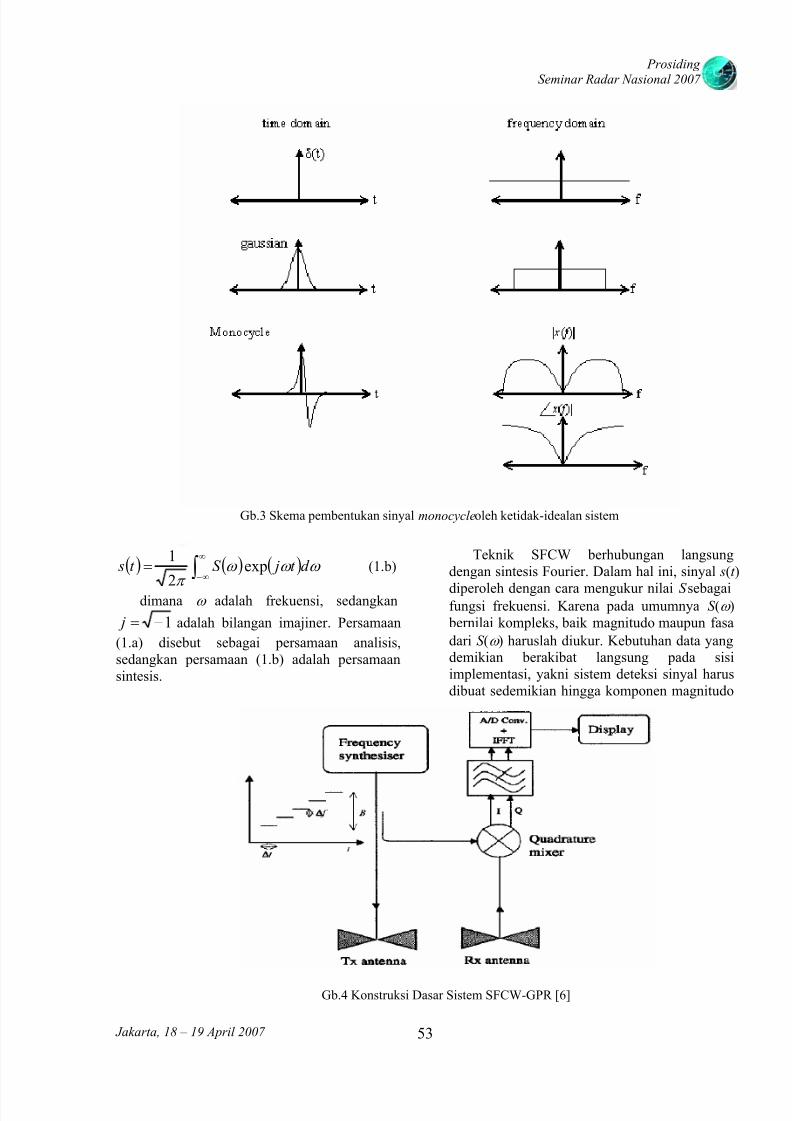
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 61/156
ProsidingSeminar Radar Nasional 2007
( ) ( ) ( )∫∞
∞−= ω ω ω
π d t jS t s exp
2
1 (1.b)
dimana ω adalah frekuensi, sedangkan
1−= j adalah bilangan imajiner. Persamaan
(1.a) disebut sebagai persamaan analisis,sedangkan persamaan (1.b) adalah persamaansintesis.
Teknik SFCW berhubungan langsungdengan sintesis Fourier. Dalam hal ini, sinyal s(t )
diperoleh dengan cara mengukur nilai S sebagaifungsi frekuensi. Karena pada umumnya S (ω ) bernilai kompleks, baik magnitudo maupun fasa
dari S (ω ) haruslah diukur. Kebutuhan data yangdemikian berakibat langsung pada sisiimplementasi, yakni sistem deteksi sinyal harusdibuat sedemikian hingga komponen magnitudo
Gb.3 Skema pembentukan sinyal monocycle oleh ketidak-idealan sistem
Gb.4 Konstruksi Dasar Sistem SFCW-GPR [6]
Jakarta, 18 – 19 April 2007 53

8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 62/156
ProsidingSeminar Radar Nasional 2007
dan fasa, atau bagian riil dan imajiner bisadidapatkan. Perangkat yang mampu melakukan pengukuran sinyal kompleks ini adalah pendemodulasi kuadratur (Quadrature
Demodulator ). Dengan terukurnya S (ω ), makasecara prinsipil, s(t ) yang merupakan data A-
scan dapat diperoleh dari proses integrasitersebut diatas.
3. Teknik Sintesa Frekuensi untuk
Radar
Pada kenyataanya, nilai S (ω ) tidak bisa
diperoleh untuk ω kontinyu, melainkan hanyauntuk sejumlah berhingga titik-titik pengamatan.Ini berarti bahwa data S hanya dapat diperoleh
untuk sekumpulan frekuensi ω yang berubah
secara diskrit saja.Dengan demikian, proses yang sebenarnya
lebih sesuai untuk memodelkan sistem radarSFCW adalah analisis dan sintesis sinyaldengan transformasi Fourier diskrit (DFT) sbb:
⎟ ⎠
⎞⎜⎝
⎛ −= ∑
−
=
k N
jn s
N S
N
n
nk
π 2exp
1 1
0
(2.a)
⎟ ⎠
⎞⎜⎝
⎛ = ∑
−
=
n N
jk S
N s
N
k
k n
π 2exp
1 1
0
(2.b)
Sintesa pulsa dilakukan dengan persamaan(2.b), sedangkan koefisien Fourier S k diperolehdari pengukuran. Indeks k berhubungan denganfrekuensi ke-k dari sinyal. Yang dilakukan saat pengukuran adalah, sekumpulan sinyal denganfrekuensi tertentu dipancarkan kemudiantanggapannya diukur untuk mendapatkan
estimasi dari koefisien Fourier yang bernilai
kompleks.
k S ˆ
Diagram blok sederhana dari sistem SFCW-
GPR diperlihatkan pada Gb.4. Pada gambartersebut, sekumpulan gelombang dengan
frekuensi tertentu (ω n) dibangkitkan oleh frequency synthesizer dan dipancarkan secara berturutan melalui antena UWB. Penerima akanmenangkap pantulan gelombang melalui antenalain untuk di-demodulasi dengan demodulatorkuadratur. Hasilnya adalah sinyal I n (inphase)dan sinyal Qn (quadrature) yang secara bersama-sama membentuk koefisien kompleks
( ) ( ) ( )nnn jQ I S ω += (3)
Setelah dicuplik dengan ADC, pengolahsinyal akan merekonstruksi sinyal kawasanwaktu s(t ) dengan pengolah IFFT.
4. Beberapa Pertimbangan dalam
Desain SFCW-GPR dan Simulasi
4.1 Pertimbangan Desain
Ada beberapa hal penting yang perludipertimbangkan dalam merancang sistemSFCW-GPR, diantaranya adalah: lama pancaran
untuk satu frekuensi tertentu (∆t ), frekuensi
pusat ω0 dan rentang frekuensi kerja, jumlahfekuensi yang digunakan ( N ), spasi antar
frekuensi ω n, tingkat kuantisasi ADC, danketersediaan komponen. Berikut ini penjelasansingkat dari masing-masing:
• Lama pancaran (∆t ) dan jumlah frekuensi N :kedua hal ini akan menentukan kecepatan pencitraan radar. Batas minimum-nya adalah settling-time dari pensintesis dan kecepatanADC, sedangkan batas maksimumnya berhubungan dengan lama waktu pencitraan
yang diinginkan. Jika ∆t terlalu kecil, adakemungkinan pembangkit frekuensi belummencapai keadaan tunak. Disisi lain, jikanilainya terlalu besar, maka waktu untukmendapatkan data akan terlalu lama. Halterakhir harus diperhitungkan untuk pencitraan benda yang bergerak dan penentuan kecepatan penyapuan radar.
• Rentang frekuensi kerja dan pusat frekuensi
ω0: frekuensi kerja akan sangatmempengaruhi aplikasi dari GPR. Radar
dengan ω0 rendah akan mampu menembus permukaan yang lebih dalam. Sebaliknya,
radar dengan ω0 besar lebih cocok untuk pencitraan dangkal. Lebar pita (BW) berhubungan langsung dengan resolusi,semakin tinggi BW semakin besar pula
resolusinya.• Tingkat kuantisasi ADC: hal ini akan
menentukan lebar dinamika sinyal yangdiperoleh. Sebagai gambaran, ADC 8 bitdapat dipakai untuk mengkuantisasi sinyaldengan lebar dinamika 41 dB, 12 bit bisamencapai 65 dB, 14 bit mampumengkuantisasi sinyal 77 dB, sedangkanuntuk sinyal dengan lebar dinamik 89 dB,sistem perlu ADC 16 bit.
• Ketersediaan komponen: meskipun dari perhitungan bisa diperoleh disain yang
bagus, implementasi menjadi perangkat
Jakarta, 18 – 19 April 2007 54
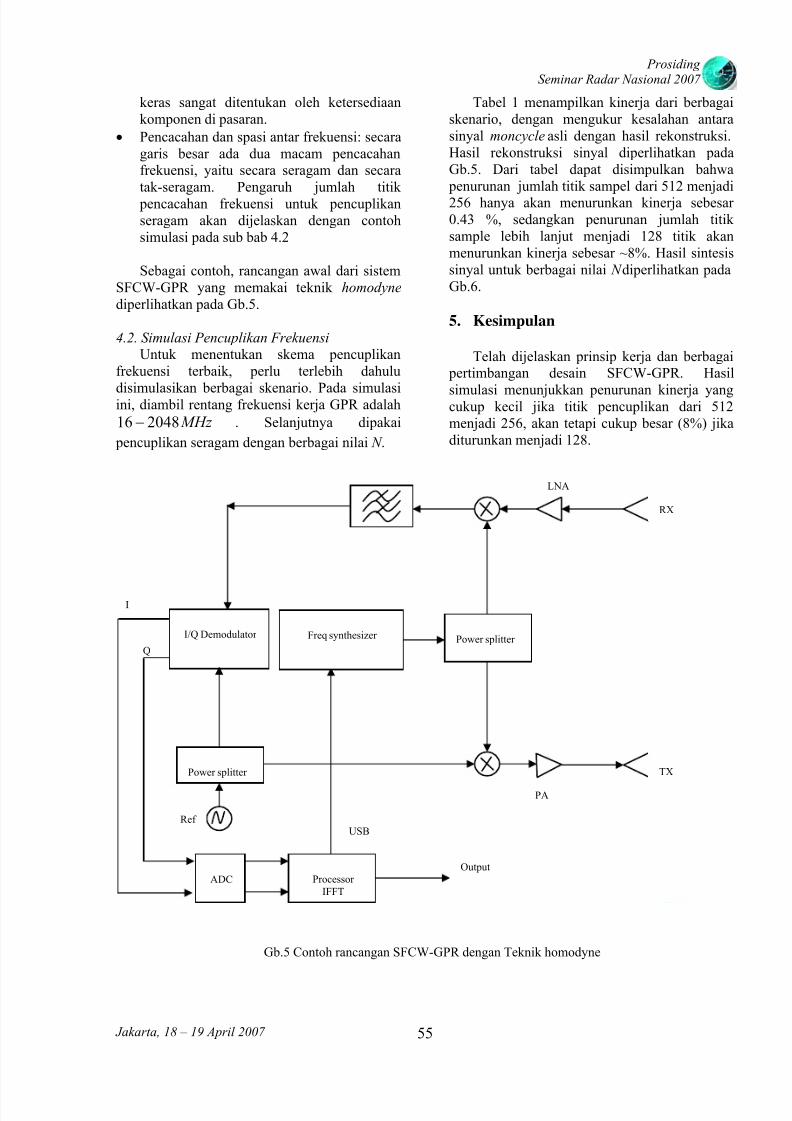
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 63/156
ProsidingSeminar Radar Nasional 2007
keras sangat ditentukan oleh ketersediaankomponen di pasaran.
• Pencacahan dan spasi antar frekuensi: secaragaris besar ada dua macam pencacahanfrekuensi, yaitu secara seragam dan secaratak-seragam. Pengaruh jumlah titik pencacahan frekuensi untuk pencuplikanseragam akan dijelaskan dengan contohsimulasi pada sub bab 4.2
Sebagai contoh, rancangan awal dari sistemSFCW-GPR yang memakai teknik homodyne
diperlihatkan pada Gb.5.
4.2. Simulasi Pencuplikan Frekuensi
Untuk menentukan skema pencuplikanfrekuensi terbaik, perlu terlebih dahulu
disimulasikan berbagai skenario. Pada simulasiini, diambil rentang frekuensi kerja GPR adalah
. Selanjutnya dipakai
pencuplikan seragam dengan berbagai nilai N .
MHz 204816 −
Tabel 1 menampilkan kinerja dari berbagaiskenario, dengan mengukur kesalahan antarasinyal moncycle asli dengan hasil rekonstruksi.Hasil rekonstruksi sinyal diperlihatkan padaGb.5. Dari tabel dapat disimpulkan bahwa penurunan jumlah titik sampel dari 512 menjadi256 hanya akan menurunkan kinerja sebesar0.43 %, sedangkan penurunan jumlah titiksample lebih lanjut menjadi 128 titik akanmenurunkan kinerja sebesar ~8%. Hasil sintesissinyal untuk berbagai nilai N diperlihatkan padaGb.6.
5. Kesimpulan
Telah dijelaskan prinsip kerja dan berbagai pertimbangan desain SFCW-GPR. Hasil
simulasi menunjukkan penurunan kinerja yangcukup kecil jika titik pencuplikan dari 512menjadi 256, akan tetapi cukup besar (8%) jikaditurunkan menjadi 128.
LNA
RX
Q
Ref
Power splitter
ProcessorIFFT
USB
I/Q Demodulator Freq synthesizer
Power splitter
I
TX
PA
OutputADC
Gb.5 Contoh rancangan SFCW-GPR dengan Teknik homodyne
Jakarta, 18 – 19 April 2007 55
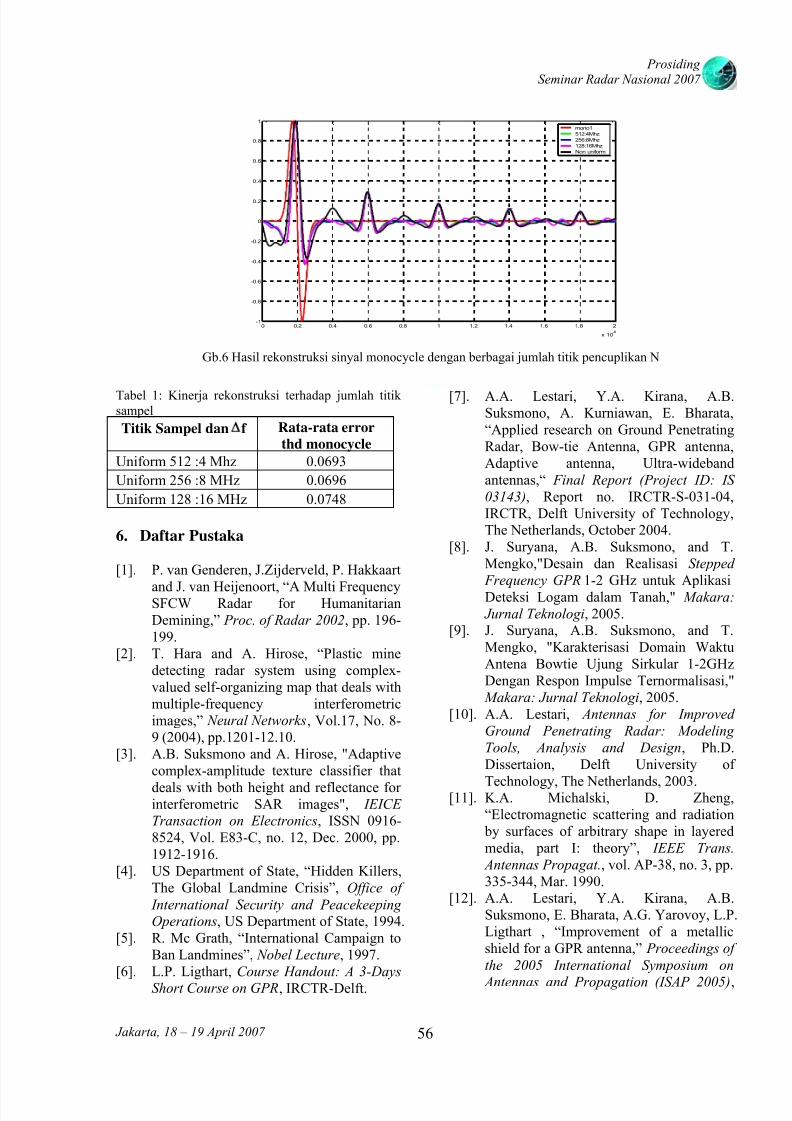
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 64/156
ProsidingSeminar Radar Nasional 2007
Tabel 1: Kinerja rekonstruksi terhadap jumlah titiksampel
Titik Sampel dan f Rata-rata error
thd monocycle
Uniform 512 :4 Mhz 0.0693
Uniform 256 :8 MHz 0.0696
Uniform 128 :16 MHz 0.0748
6. Daftar Pustaka
[1]. P. van Genderen, J.Zijderveld, P. Hakkaart
and J. van Heijenoort, “A Multi FrequencySFCW Radar for HumanitarianDemining,” Proc. of Radar 2002, pp. 196-199.
[2]. T. Hara and A. Hirose, “Plastic minedetecting radar system using complex-valued self-organizing map that deals withmultiple-frequency interferometricimages,” Neural Networks, Vol.17, No. 8-9 (2004), pp.1201-12.10.
[3]. A.B. Suksmono and A. Hirose, "Adaptivecomplex-amplitude texture classifier that
deals with both height and reflectance forinterferometric SAR images", IEICE
Transaction on Electronics, ISSN 0916-8524, Vol. E83-C, no. 12, Dec. 2000, pp.1912-1916.
[4]. US Department of State, “Hidden Killers,The Global Landmine Crisis”, Office of
International Security and Peacekeeping
Operations, US Department of State, 1994.[5]. R. Mc Grath, “International Campaign to
Ban Landmines”, Nobel Lecture, 1997.[6]. L.P. Ligthart, Course Handout: A 3-Days
Short Course on GPR, IRCTR-Delft.
[7]. A.A. Lestari, Y.A. Kirana, A.B.Suksmono, A. Kurniawan, E. Bharata,“Applied research on Ground PenetratingRadar, Bow-tie Antenna, GPR antenna,Adaptive antenna, Ultra-widebandantennas,“ Final Report (Project ID: IS
03143), Report no. IRCTR-S-031-04,IRCTR, Delft University of Technology,The Netherlands, October 2004.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
x 10-8
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
mono1
512:4Mhz
256:8Mhz
128:16Mhz
Non uniform
Gb.6 Hasil rekonstruksi sinyal monocycle dengan berbagai jumlah titik pencuplikan N
[8]. J. Suryana, A.B. Suksmono, and T.Mengko,"Desain dan Realisasi Stepped
Frequency GPR 1-2 GHz untuk AplikasiDeteksi Logam dalam Tanah," Makara:
Jurnal Teknologi, 2005.[9]. J. Suryana, A.B. Suksmono, and T.
Mengko, "Karakterisasi Domain WaktuAntena Bowtie Ujung Sirkular 1-2GHzDengan Respon Impulse Ternormalisasi,"
Makara: Jurnal Teknologi, 2005.[10]. A.A. Lestari, Antennas for Improved
Ground Penetrating Radar: Modeling
Tools, Analysis and Design, Ph.D.Dissertaion, Delft University of
Technology, The Netherlands, 2003.[11]. K.A. Michalski, D. Zheng,“Electromagnetic scattering and radiation by surfaces of arbitrary shape in layeredmedia, part I: theory”, IEEE Trans.
Antennas Propagat., vol. AP-38, no. 3, pp.335-344, Mar. 1990.
[12]. A.A. Lestari, Y.A. Kirana, A.B.Suksmono, E. Bharata, A.G. Yarovoy, L.P.Ligthart , “Improvement of a metallicshield for a GPR antenna,” Proceedings of
the 2005 International Symposium on
Antennas and Propagation (ISAP 2005),
Jakarta, 18 – 19 April 2007 56

8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 65/156
ProsidingSeminar Radar Nasional 2007
vol. 3, pp. 965-968, Seoul, Korea, August2005.
[13]. A.A. Lestari, Y.A. Kirana, A.B.Suksmono, E. Bharata, A.G. Yarovoy, L.P.Ligthart , “A ground penetrating radarantenna with improved shield,”
Proceedings of the 11th International
Symposium on Antenna Technology and
Applied Electromagnetics (ANTEM 2005), pp. 406-407, Saint-Malo, France, June2005.
Jakarta, 18 – 19 April 2007 57

8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 66/156
ProsidingSeminar Radar Nasional 2007
Pemrosesan Sinyal untuk Data A-Scan GPR
Deni Yulian 1, A. Andaya Lestari 2,3
1Radar and Communication Systems (RCS)Segitiga Emas Business Park, Unit No. 6 Jalan Prof. Dr. Satrio, Kav. 6 Jakarta 12940, Indonesia
Phone: +62-21-57951133 Fax: +62-21-57951138, Email : [email protected] International Research Centre for Telecommunications and Radar – Indonesian BranchSTEI – ITB, Jalan Ganesha 10 Bandung, Indonesia, Email : [email protected]
3 International Research Centre for Telecommunications and Radar – TU DelftMekelweg 4 2628 CD Delft, The Netherlands
Abstract
In GPR, processing of the received signals is important for detecting and identifying the targets and fordiscriminating the targets from clutter caused by reflections from soil inhomogeneities. This paper discusses the
signal processing techniques for reducing clutter and increasing the quality of B-Scan images produced by the GPR system owned by Radar Communication Systems (RCS). The techniques include zero-offset removal, noise
reduction, clutter reduction, ground reflection removal, and background removal, which are all needed to increasethe quality of B-Scans carried out in a GPR survey. As a result, the obtained subsurface images are improved toallow more accurate interpretation by the user.
Keyword : Signal Processing, GPR, B-Scan, Noise Reduction, Zero-offset Removal, Clutter Reduction, Ground Reflection Removal, Background Removal
Abstrak
Dalam aplikasi GPR, pemrosesan sinyal merupakan suatu hal yang sangat penting untuk dapat mengenali,
mengidentifikasi dan memisahkan target yang di deteksi dari cluter yang disebabkan oleh ketidakhomogenan tanah. Pada paper ini akan dibahas mengenai teknik pemrosesan sinyal untuk mereduksi clutter dan memperbaiki kualitas
citra B-Scan yang dihasilkan oleh sistem GPR yang dimiliki oleh Radar Communication System (RCS).
Pemrosesan sinyal yang dilakukan meliputi zero-offset removal, noise reduction, clutter reduction, groundreflection removal, dan background removal yang semuanya diperlukan untuk meningkatkan kualitas citra B-Scanhasil survey GPR sehingga objek yang dideteksi dapat dengan mudah diinterpretasikan.
Kata Kunci : Pemrosesan Sinyal, GPR, B-Scan, Zero-offset Removal, Noise Reduction, Clutter Reduction, Ground Reflection Removal, Background Removal
1. Pendahuluan
Ground Penetrating Radar (GPR) telahdigunakan secara luas dalam berbagai aplikasisebagai alat untuk menyelidiki kondisi di bawah
permukaan tanah tanpa harus menggali danmerusak tanah. GPR bekerja denganmemancarkan gelombang elektromagnetik kedalam tanah dan menerima sinyal yangdipantulkan untuk mendeteksi dan menentukanletak berbagai objek yang terletak di bawah permukaan tanah.
Selain menerima sinyal hasil refleksi daritarget yang dideteksi, receiver juga menerimahamburan sinyal lainnya yang dipantulan oleh benda-benda disekitar target atau yang biasadisebut dengan clutter yang dapat menimbulkan
efek masking terhadap target yang dideteksi.Oleh karena itu, diperlukan suatu pemrosesan
sinyal lebih lanjut untuk mereduksi pengaruhdari clutter tersebut sehingga sinyal hasilrefleksi yang diterima bebas dari interferensi.Tujuan utama dilakukannya pemrosesan sinyalterhadap sinyal yg diterima oleh antena
penerima GPR ini adalah untuk menghasilkangambaran kondisi di bawah permukaan tanahyang dapat dengan mudah dibaca dandiinterpretasikan oleh user atau untuk dapatmengklasifikasikan target berdasarkan proseduratau template yang telah diketahui [1]
Melihat peran penting pemrosesan sinyaldiatas, maka sudah menjadi keharusan bagisetiap sistem GPR untuk menerapkan pemrosesan sinyal lebih lanjut terhadap datahasil survey GPR-nya. Pada paper ini kita akanmelihat bagaimana peran dari pemrosesan sinyal
dalam memperjelas gambaran kondisi di bawah
Jakarta, 18 – 19 April 2007 58

8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 67/156
ProsidingSeminar Radar Nasional 2007
permukaan tanah atau target yang dideteksi olehsistem GPR.
2. Metode Pemrosesan Sinyal
Secara garis besar pemrosesan data hasilsurvey GPR diklasifikasikan kedalam tiga bagian berdasarkan dimensi data yangdiprosesnya, yaitu pemrosesan data A-Scanuntuk memproses data satu dimensi dan B-Scanserta C-Scan untuk memproses data dua dimensi.Pada paper ini hanya akan di bahas mengenai pemrosesan data A-Scan hasil survey GPR.
Dalam pemrosesan data A-Scan ini,sedikitnya ada 5 tahapan pemrosesan sinyalyang dapat dilakukan untuk dapat meningkatkankualitas citra B-Scan hasil survey GPR sehingga
dapat dengan mudah diinterpretasikan. Tahap pertama adalah zero offset removal. Zero offset
removal ini bertujuan untuk menghilangkankomponen DC dari sinyal balik yang diterimaoleh antena GPR dengan cara memastikan bahwa nilai tengah dari data A-Scan mendekatinol, dengan asumsi distribusi probabilitas dariA-Scan adalah simetris terhadap nilai tengahnyadengan nilai tengah terpendeknya konstansepanjang durasi waktu A-Scan. Salah satualgoritma yang dapat dipakai untuk melakukanhal tersebut ditunjukkan pada persamaan 1 [1].
0
1' ( ) ( ) ( )
N
n n n
n
A t A t A t N =
= − ∑ (1)
dimana,An(t)=sample data yang belum diprosesA'n(t)=data yang telah di proses, dann=jumlah sampel
Algoritma diatas hanya berlaku untuk sinyaldengan nilai tengah terpendeknya konstan
sepanjang durasi waktu A-Scan dan memilikidistribusi probabilitas amplitudo yang simetris.
Tahap kedua adalah noise reduction yang bertujuan untuk mereduksi variansi noisedengan faktor √ N dan memberikan peningkatandalam signal-to-noise ratio (S/N) yang setaradengan 10 log10 N dB. Hal ini dapat dicapaidengan merata-ratakan semua sample individualA-Scan atau merata-ratakan A-Scan setiap beberapa sample dan menyimpan hasilnyasecara berulang. Averaging tidak berpengaruhterhadap pengurangan clutter , akan tetapi dapat
mengurangi random noise pada data hasil surveyGPR.
Formula yang biasa digunakan untuk prosesini adalah,
1
1
( ) ' ( )' ( ) ' ( ) n n
n n
A t A t A t A t
K
−
−
−= +
(2)
Dimana,An(t) =sample data yang belum diprosesA'n(t)=sample data yang sudah dirata-ratakan
Faktor pembagi K yang dipilih harusdisesuaikan dengan nlai n atau nilai tetaplainnya yang akan memberikan nilai perata-rataan yang tepat. Nilai perata-rataan juga harusdisesuaikan dengan kecepatan laju radar, jikatidak data akan terkontaminasi oleh sample-sampel yang berdekatan.
Tahap ketiga adalah clutter reduction.Metode ini dapat dilakukan dengan caramengurangkan setiap sample A-Scan denganrata-rata dari kumpulan A-Scan atau B-Scanyang diambil dari area tertentu yang dikehendaki,misalnya:
, , ,
1
1' ( ) ( ) ( )
a N
n a n a n a
aa
A t A t A t N =
= − ∑ (3)
Dimana, N = 1 sampai N ( N = Jumlah Sampel)A = 1 sampai N a (N a = jumlah sinyal A-Scan)An,a(t) = sinyal A-Scan yang belum diprosesA’n,a(t) = sinyal A-Scan yang telah diproses
Metode ini dapat bekerja dengan baik jika jumlah target terbatas dan secara fisik terpisahdengan cukup baik antara satu dengan lainnya[1].
Dua tahap selanjutnya adalah ground
reflection removal untuk menghilangkan
pengaruh refleksi yang kuat antara antena dan permukaan tanah dan background removal untuk memisahkan target dari lingkungan sekitarsehingga yang tampak pada hasil B-Scan hanyarefleksi yang disebabkan oleh target saja.Metode ini dapat dilakukan dengan melakukansubtraksi sinyal hasil refleksi yang diterima olehantena penerima GPR pada chanel 1 dan chanel2 atau sebaliknya. Metode ini bekerja hanya jikaantena pemancar dan penerima di susun dalamdifferential setup. Pada mode ini, sinyal yangditerima dari pantulan objek yang memiliki
dimensi jauh lebih kecil dari panjang gelombangsinyal yang dipancarkan akan mengalami
Jakarta, 18 – 19 April 2007 59
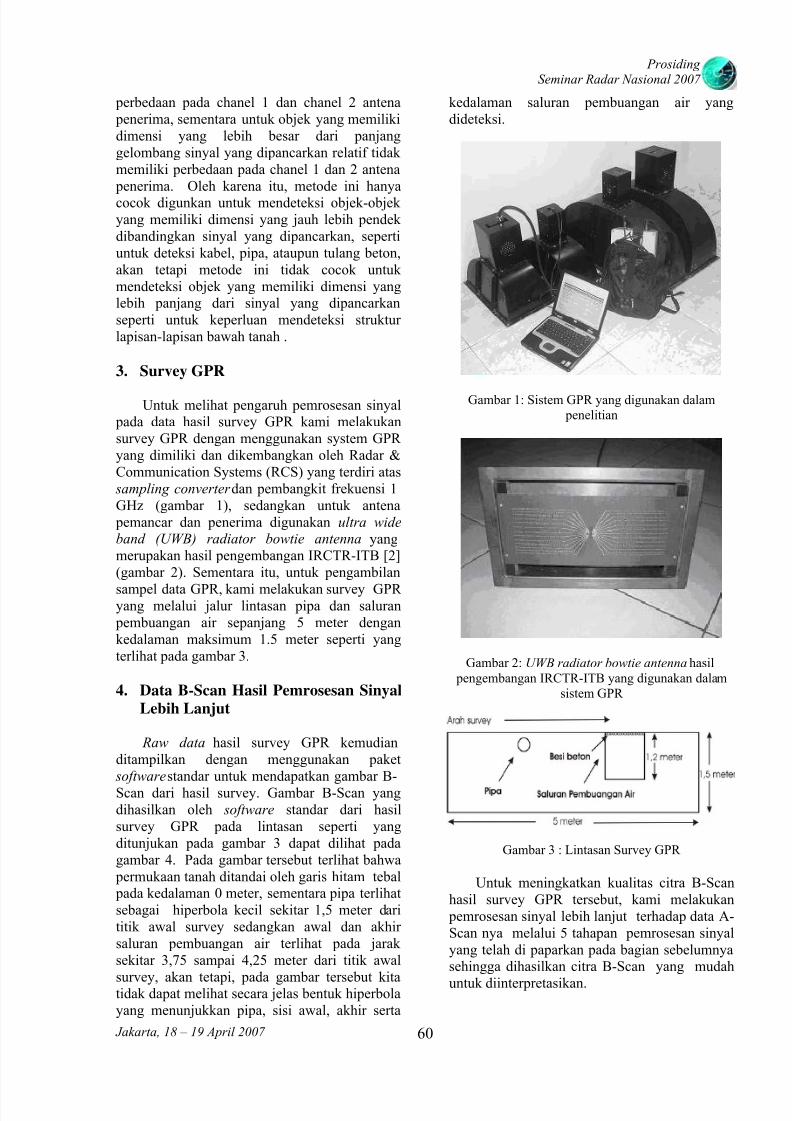
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 68/156
ProsidingSeminar Radar Nasional 2007
perbedaan pada chanel 1 dan chanel 2 antena penerima, sementara untuk objek yang memilikidimensi yang lebih besar dari panjanggelombang sinyal yang dipancarkan relatif tidakmemiliki perbedaan pada chanel 1 dan 2 antena penerima. Oleh karena itu, metode ini hanyacocok digunkan untuk mendeteksi objek-objekyang memiliki dimensi yang jauh lebih pendekdibandingkan sinyal yang dipancarkan, sepertiuntuk deteksi kabel, pipa, ataupun tulang beton,akan tetapi metode ini tidak cocok untukmendeteksi objek yang memiliki dimensi yanglebih panjang dari sinyal yang dipancarkanseperti untuk keperluan mendeteksi strukturlapisan-lapisan bawah tanah .
3. Survey GPR
Untuk melihat pengaruh pemrosesan sinyal pada data hasil survey GPR kami melakukansurvey GPR dengan menggunakan system GPRyang dimiliki dan dikembangkan oleh Radar &Communication Systems (RCS) yang terdiri atas
sampling converter dan pembangkit frekuensi 1GHz (gambar 1), sedangkan untuk antena pemancar dan penerima digunakan ultra wide
band (UWB) radiator bowtie antenna yangmerupakan hasil pengembangan IRCTR-ITB [2](gambar 2). Sementara itu, untuk pengambilan
sampel data GPR, kami melakukan survey GPRyang melalui jalur lintasan pipa dan saluran pembuangan air sepanjang 5 meter dengankedalaman maksimum 1.5 meter seperti yangterlihat pada gambar 3.
4. Data B-Scan Hasil Pemrosesan Sinyal
Lebih Lanjut
Raw data hasil survey GPR kemudianditampilkan dengan menggunakan paket
software standar untuk mendapatkan gambar B-Scan dari hasil survey. Gambar B-Scan yangdihasilkan oleh software standar dari hasilsurvey GPR pada lintasan seperti yangditunjukan pada gambar 3 dapat dilihat padagambar 4. Pada gambar tersebut terlihat bahwa permukaan tanah ditandai oleh garis hitam tebal pada kedalaman 0 meter, sementara pipa terlihatsebagai hiperbola kecil sekitar 1,5 meter darititik awal survey sedangkan awal dan akhirsaluran pembuangan air terlihat pada jaraksekitar 3,75 sampai 4,25 meter dari titik awal
survey, akan tetapi, pada gambar tersebut kitatidak dapat melihat secara jelas bentuk hiperbolayang menunjukkan pipa, sisi awal, akhir serta
kedalaman saluran pembuangan air yangdideteksi.
Gambar 1: Sistem GPR yang digunakan dalam penelitian
Gambar 2: UWB radiator bowtie antenna hasil pengembangan IRCTR-ITB yang digunakan dalam
sistem GPR
Gambar 3 : Lintasan Survey GPR
Untuk meningkatkan kualitas citra B-Scanhasil survey GPR tersebut, kami melakukan pemrosesan sinyal lebih lanjut terhadap data A-Scan nya melalui 5 tahapan pemrosesan sinyalyang telah di paparkan pada bagian sebelumnyasehingga dihasilkan citra B-Scan yang mudah
untuk diinterpretasikan.
Jakarta, 18 – 19 April 2007 60
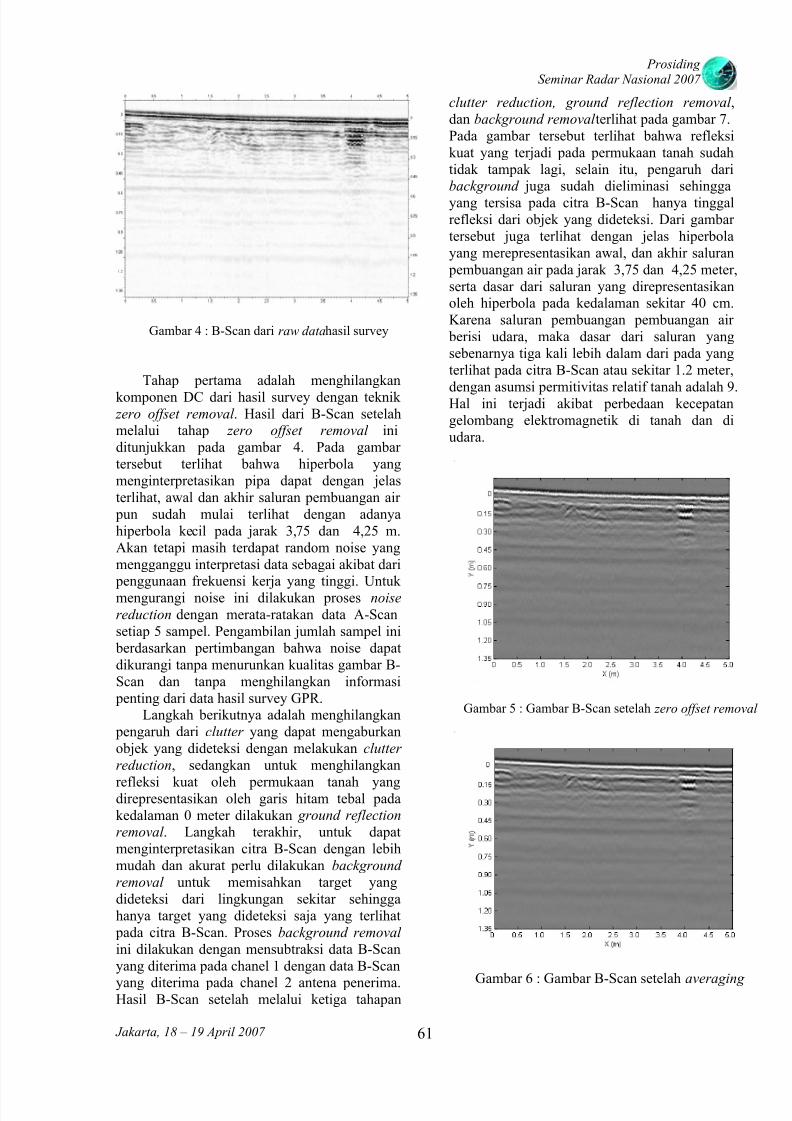
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 69/156
ProsidingSeminar Radar Nasional 2007
Gambar 4 : B-Scan dari raw data hasil survey
Tahap pertama adalah menghilangkan
komponen DC dari hasil survey dengan teknik zero offset removal . Hasil dari B-Scan setelahmelalui tahap zero offset removal iniditunjukkan pada gambar 4. Pada gambartersebut terlihat bahwa hiperbola yangmenginterpretasikan pipa dapat dengan jelasterlihat, awal dan akhir saluran pembuangan air pun sudah mulai terlihat dengan adanyahiperbola kecil pada jarak 3,75 dan 4,25 m.Akan tetapi masih terdapat random noise yangmengganggu interpretasi data sebagai akibat dari penggunaan frekuensi kerja yang tinggi. Untukmengurangi noise ini dilakukan proses noise
reduction dengan merata-ratakan data A-Scansetiap 5 sampel. Pengambilan jumlah sampel ini berdasarkan pertimbangan bahwa noise dapatdikurangi tanpa menurunkan kualitas gambar B-Scan dan tanpa menghilangkan informasi penting dari data hasil survey GPR.
Langkah berikutnya adalah menghilangkan pengaruh dari clutter yang dapat mengaburkanobjek yang dideteksi dengan melakukan clutter
reduction, sedangkan untuk menghilangkan
refleksi kuat oleh permukaan tanah yangdirepresentasikan oleh garis hitam tebal padakedalaman 0 meter dilakukan ground reflection
removal . Langkah terakhir, untuk dapatmenginterpretasikan citra B-Scan dengan lebihmudah dan akurat perlu dilakukan background
removal untuk memisahkan target yangdideteksi dari lingkungan sekitar sehinggahanya target yang dideteksi saja yang terlihat pada citra B-Scan. Proses background removal ini dilakukan dengan mensubtraksi data B-Scanyang diterima pada chanel 1 dengan data B-Scan
yang diterima pada chanel 2 antena penerima.Hasil B-Scan setelah melalui ketiga tahapan
clutter reduction, ground reflection removal ,dan background removal terlihat pada gambar 7.Pada gambar tersebut terlihat bahwa refleksikuat yang terjadi pada permukaan tanah sudahtidak tampak lagi, selain itu, pengaruh daribackground juga sudah dieliminasi sehinggayang tersisa pada citra B-Scan hanya tinggalrefleksi dari objek yang dideteksi. Dari gambartersebut juga terlihat dengan jelas hiperbolayang merepresentasikan awal, dan akhir saluran pembuangan air pada jarak 3,75 dan 4,25 meter,serta dasar dari saluran yang direpresentasikanoleh hiperbola pada kedalaman sekitar 40 cm.Karena saluran pembuangan pembuangan air berisi udara, maka dasar dari saluran yangsebenarnya tiga kali lebih dalam dari pada yangterlihat pada citra B-Scan atau sekitar 1.2 meter,
dengan asumsi permitivitas relatif tanah adalah 9.Hal ini terjadi akibat perbedaan kecepatangelombang elektromagnetik di tanah dan diudara.
Gambar 5 : Gambar B-Scan setelah zero offset removal
Gambar 6 : Gambar B-Scan setelah averaging
Jakarta, 18 – 19 April 2007 61
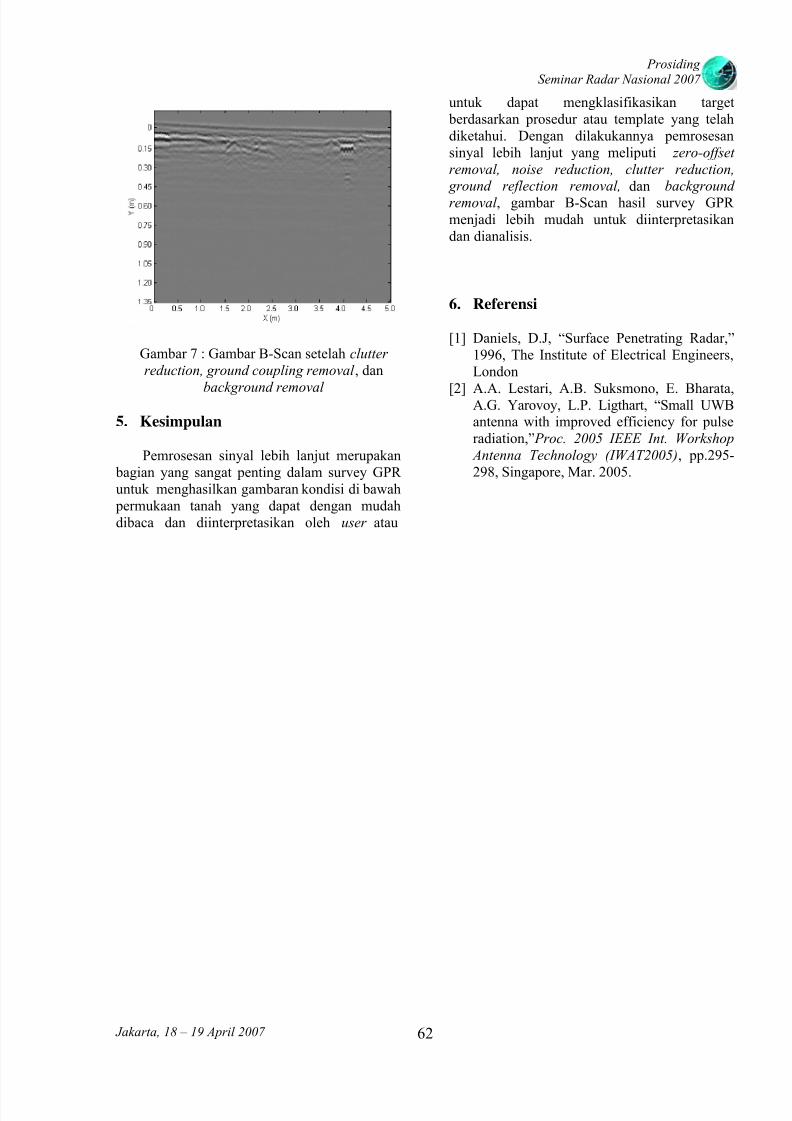
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 70/156
ProsidingSeminar Radar Nasional 2007
Gambar 7 : Gambar B-Scan setelah clutter
reduction, ground coupling removal , dan
background removal
5. Kesimpulan
Pemrosesan sinyal lebih lanjut merupakan bagian yang sangat penting dalam survey GPRuntuk menghasilkan gambaran kondisi di bawah permukaan tanah yang dapat dengan mudahdibaca dan diinterpretasikan oleh user atau
untuk dapat mengklasifikasikan target berdasarkan prosedur atau template yang telahdiketahui. Dengan dilakukannya pemrosesansinyal lebih lanjut yang meliputi zero-offset
removal, noise reduction, clutter reduction,
ground reflection removal, dan background
removal , gambar B-Scan hasil survey GPRmenjadi lebih mudah untuk diinterpretasikandan dianalisis.
6. Referensi
[1] Daniels, D.J, “Surface Penetrating Radar,”1996, The Institute of Electrical Engineers,London
[2] A.A. Lestari, A.B. Suksmono, E. Bharata,A.G. Yarovoy, L.P. Ligthart, “Small UWBantenna with improved efficiency for pulseradiation,” Proc. 2005 IEEE Int. Workshop
Antenna Technology (IWAT2005), pp.295-298, Singapore, Mar. 2005.
Jakarta, 18 – 19 April 2007 62

8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 71/156
ProsidingSeminar Radar Nasional 2007
Pengukuran Late - Time - Ringing Antenna Menggunakan
Sistem impulse GPR
Liarto3, A.A. Lestari1, E. Bharata2 1 International Research Centre for Telecom and Radar – Indonesian Branch (IRCTR-IB), Indonesia
2
Bandung Institute of Technology (ITB), Indonesia3Radar & Communication Systems (RCS)Segitiga Emas Business Park, Unit No. 6 Jalan Prof. Dr. Satrio, Kav. 6 Jakarta 12940, Indonesia
Abstract
GPR (Ground Penetrating Radar) is a kind of radar used to detect buried objects in near surface. Late-time-ringing effect changes the shapes of GPR transmit pulses, causing the objects undetected. Suppressing the late-
time- ringing can be conducted by loading resistor to the antenna. In this research the late-time-ringing is measuredusing impulse GPR system for bow-tie antenna loaded by chip SMD resistor and dipole antenna loaded by resistorabsorber material. The result shows that the bow-tie antenna with chip SMD resistor suppressed the late-time-ringing maximally at the frequency of 1 GHz while the dipole antenna with resistor absorber material suppressed
maximally at the frequency of 200 MHz.
Keywords: late-time-ringing, bow-tie antenna, dipole antenna
Abstrak
GPR (Ground Penetrating Radar) adalah radar deteksi objek tersembunyi pada permukaan dangkal. Besarnya late-time-ringing menyebabkan perubahan bentuk pulsa transmit GPR sehingga objek tertutupi. Late-
time-ringing dapat dikurangi dengan melakukan pembebanan resistif antena. Pada penelitian ini dilakukan pengukuran late-time-ringing menggunakan sistem impulse GPR pada antena bow-tie terbebani chip resistor SMD,dan pada antena dipole terbebani resistor material absorber. Dari pengukuran di peroleh hasil, antena bow-tiedengan pembebanan chip resistor SMD memiliki penekanan late-time-ringing maksimum pada frekwensi 1 GHz,dan antena dipole dengan pembebanan resistor material absorber memiliki penekanan late- time-ringing maksimum
pada frekwensi 200MHz.
Kata kunci : Late-time-ringing, antena bow-tie, antena dipole
1. Pendahuluan
Pemanfaatan GPR untuk eksplorasi permukaan dangkal (maksimal kedalaman ±50m) pada masa sekarang terjadi peningkatan, inikarena penggunaan resolusi tinggi dan termasuksistem yang bersifat nondestruktif. AplikasiGPR diantaranya untuk keperluan sipil (deteksi
keretakan jalan, konstruksi jembatan, konstruksifondasi banguan), keperluan militer (deteksiranjau darat) dan keperluan arkeologi (deteksisitus-situs purbakala).
Data objek diperoleh secara lengkap bilaGPR memiliki penekanan maksimal terhadaplate-time-ringing antenanya. Late-time-ringing adalah berubahnya bentuk pulsa GPR karenarefleksi internal antena sehingga objektertutupi. Besarnya late-time-ringing dapat dikurangi dengan teknik pembebanan resistifantena.
Pembebanan resistor antena dapat dilakukanmenggunakan chip resistor SMD maupundengan resistor material absorber . Pengukuranlate-time-ringing secara konvensional dilakukandengan perangkat laboratorium (spectrum
analyzer atau network analyzer), dibahas pada paper [1-4]. Pengukuran late-time-ringing secaranonkonvensional dilakukan menggunakan
sistem GPR. Penelitian ini melakukan pengukuran late-time-ringing dengan metodenonkonvensional pada antena bow-tie dengan pembebanan chip resistor SMD (gambar 1) danantena dipole yang dibebani resistor material
absorber (gambar 2 ), desain kedua antenatersebut dibahas pada paper [2-4]. Pengukuranlate-time-ringing menggunakan sistem GPRsecara langsung dilakukan karena metode inilebih praktis untuk tahap aplikasi dibandingkan pengukuran secara konvensional. Penetrasisistem GPR ditentukan oleh tinggi rendahnya
frekwensi transmit (f c transmit) yang digunakan.
Jakarta, 18 – 19 April 2007 63
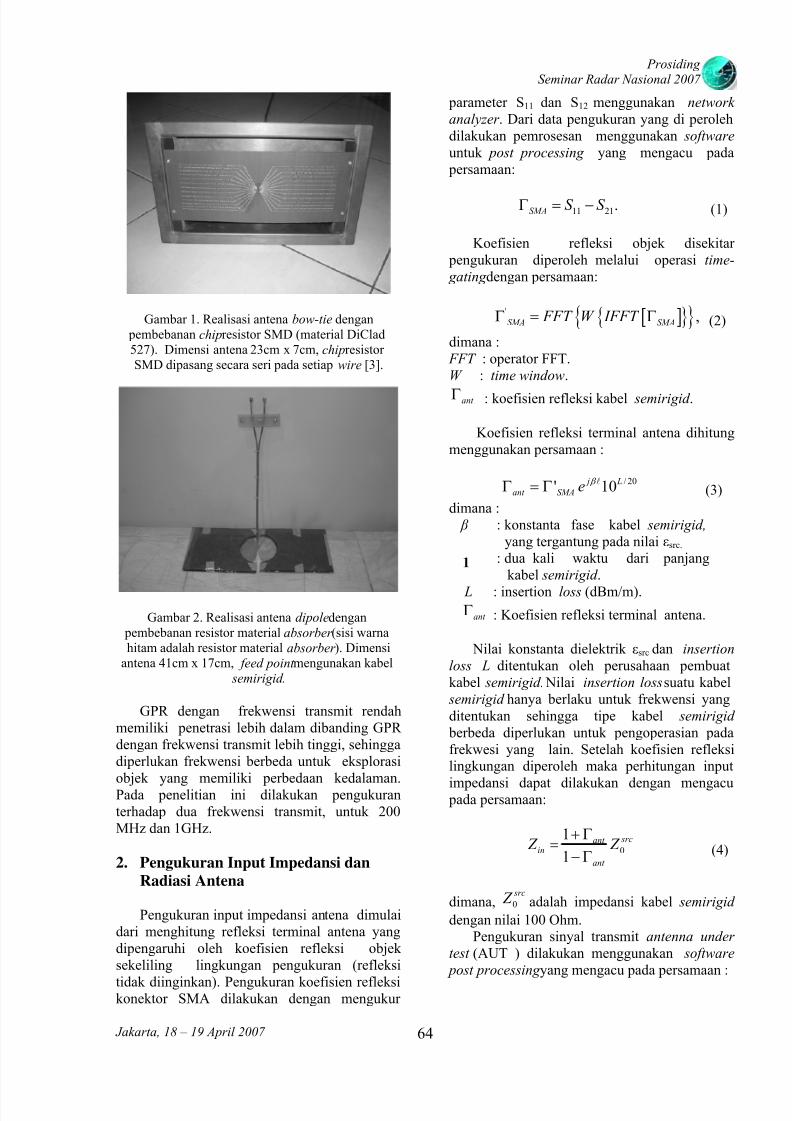
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 72/156
ProsidingSeminar Radar Nasional 2007
Gambar 1. Realisasi antena bow-tie dengan pembebanan chip resistor SMD (material DiClad527). Dimensi antena 23cm x 7cm, chip resistorSMD dipasang secara seri pada setiap wire [3].
Gambar 2. Realisasi antena dipole dengan pembebanan resistor material absorber (sisi warnahitam adalah resistor material absorber ). Dimensi
antena 41cm x 17cm, feed point mengunakan kabel semirigid .
GPR dengan frekwensi transmit rendahmemiliki penetrasi lebih dalam dibanding GPRdengan frekwensi transmit lebih tinggi, sehinggadiperlukan frekwensi berbeda untuk eksplorasiobjek yang memiliki perbedaan kedalaman.Pada penelitian ini dilakukan pengukuranterhadap dua frekwensi transmit, untuk 200MHz dan 1GHz.
2. Pengukuran Input Impedansi dan
Radiasi Antena
Pengukuran input impedansi antena dimulaidari menghitung refleksi terminal antena yangdipengaruhi oleh koefisien refleksi objeksekeliling lingkungan pengukuran (refleksi
tidak diinginkan). Pengukuran koefisien refleksikonektor SMA dilakukan dengan mengukur
parameter S11 dan S12 menggunakan network
analyzer . Dari data pengukuran yang di perolehdilakukan pemrosesan menggunakan software untuk post processing yang mengacu pada persamaan:
11 21.SMAS S Γ = − (1)
Koefisien refleksi objek disekitar pengukuran diperoleh melalui operasi time-
gating dengan persamaan:
[ ] ' ,SMA SMA
FFT W IFFT Γ = Γ (2)
dimana : FFT : operator FFT.W : time window.
ant Γ : koefisien refleksi kabel semirigid .
Koefisien refleksi terminal antena dihitungmenggunakan persamaan :
/ 20' 10 j L
ant SMAe β Γ = Γ l
(3)
dimana : β : konstanta fase kabel semirigid,
yang tergantung pada nilai εsrc.
: dua kali waktu dari panjangkabel semirigid .
L : insertion loss (dBm/m).
ant Γ : Koefisien refleksi terminal antena.
Nilai konstanta dielektrik εsrc dan insertion
loss L ditentukan oleh perusahaan pembuatkabel semirigid. Nilai insertion loss suatu kabel
semirigid hanya berlaku untuk frekwensi yangditentukan sehingga tipe kabel semirigid berbeda diperlukan untuk pengoperasian padafrekwesi yang lain. Setelah koefisien refleksilingkungan diperoleh maka perhitungan input
impedansi dapat dilakukan dengan mengacu pada persamaan:
0
1
1
srcant in
ant
Z Z + Γ
=− Γ (4)
dimana, 0
src Z adalah impedansi kabel semirigid
dengan nilai 100 Ohm.Pengukuran sinyal transmit antenna under
test (AUT ) dilakukan menggunakan software
post processing yang mengacu pada persamaan :
l
Jakarta, 18 – 19 April 2007 64
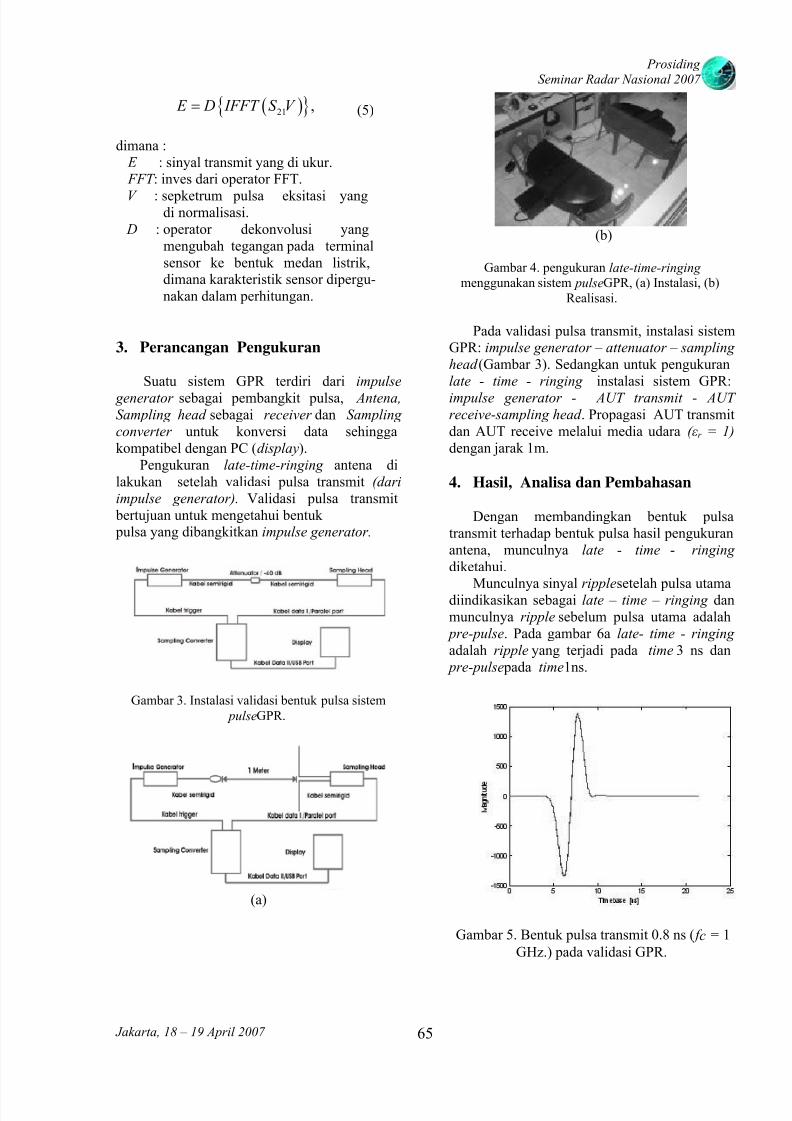
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 73/156
ProsidingSeminar Radar Nasional 2007
( ) 21 , E D IFFT S V = (5)
dimana : E : sinyal transmit yang di ukur. FFT : inves dari operator FFT.
V : sepketrum pulsa eksitasi yangdi normalisasi.
D : operator dekonvolusi yangmengubah tegangan pada terminalsensor ke bentuk medan listrik,dimana karakteristik sensor dipergu-nakan dalam perhitungan.
3. Perancangan Pengukuran
Suatu sistem GPR terdiri dari impulse
generator sebagai pembangkit pulsa, Antena, Sampling head sebagai receiver dan Sampling
converter untuk konversi data sehinggakompatibel dengan PC (display).
Pengukuran late-time-ringing antena dilakukan setelah validasi pulsa transmit (dari
impulse generator). Validasi pulsa transmit bertujuan untuk mengetahui bentuk pulsa yang dibangkitkan impulse generator.
Gambar 3. Instalasi validasi bentuk pulsa sistem pulse GPR.
(a)
(b)
Gambar 4. pengukuran late-time-ringing menggunakan sistem pulse GPR, (a) Instalasi, (b)
Realisasi.
Pada validasi pulsa transmit, instalasi sistemGPR: impulse generator – attenuator – sampling
head (Gambar 3). Sedangkan untuk pengukuranlate - time - ringing instalasi sistem GPR:
impulse generator - AUT transmit - AUTreceive- sampling head . Propagasi AUT transmitdan AUT receive melalui media udara ( εr = 1)
dengan jarak 1m.
4. Hasil, Analisa dan Pembahasan
Dengan membandingkan bentuk pulsatransmit terhadap bentuk pulsa hasil pengukuranantena, munculnya late - time - ringing diketahui.
Munculnya sinyal ripple setelah pulsa utamadiindikasikan sebagai late – time – ringing danmunculnya ripple sebelum pulsa utama adalah
pre-pulse. Pada gambar 6a late- time - ringing adalah ripple yang terjadi pada time 3 ns dan
pre-pulse pada time 1ns.
Gambar 5. Bentuk pulsa transmit 0.8 ns ( f c = 1
GHz.) pada validasi GPR.
Jakarta, 18 – 19 April 2007 65
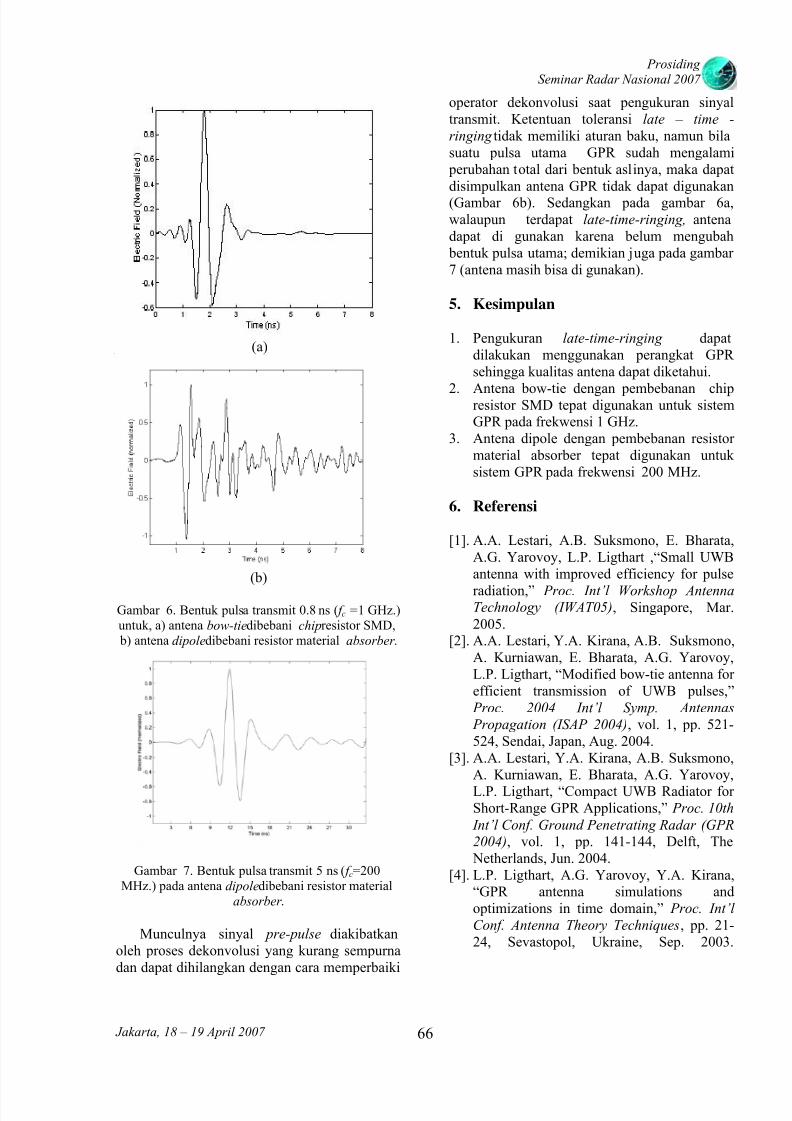
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 74/156
ProsidingSeminar Radar Nasional 2007
(a)
(b)
Gambar 6. Bentuk pulsa transmit 0.8 ns ( f c =1 GHz.)untuk, a) antena bow-tie dibebani chip resistor SMD, b) antena dipole dibebani resistor material absorber .
Gambar 7. Bentuk pulsa transmit 5 ns ( f c =200MHz.) pada antena dipole dibebani resistor material
absorber .
Munculnya sinyal pre-pulse diakibatkanoleh proses dekonvolusi yang kurang sempurnadan dapat dihilangkan dengan cara memperbaiki
operator dekonvolusi saat pengukuran sinyaltransmit. Ketentuan toleransi late – time -
ringing tidak memiliki aturan baku, namun bilasuatu pulsa utama GPR sudah mengalami perubahan total dari bentuk aslinya, maka dapatdisimpulkan antena GPR tidak dapat digunakan(Gambar 6b). Sedangkan pada gambar 6a,walaupun terdapat late-time-ringing, antenadapat di gunakan karena belum mengubah bentuk pulsa utama; demikian juga pada gambar7 (antena masih bisa di gunakan).
5. Kesimpulan
1. Pengukuran late-time-ringing dapatdilakukan menggunakan perangkat GPRsehingga kualitas antena dapat diketahui.
2. Antena bow-tie dengan pembebanan chipresistor SMD tepat digunakan untuk sistemGPR pada frekwensi 1 GHz.
3. Antena dipole dengan pembebanan resistormaterial absorber tepat digunakan untuksistem GPR pada frekwensi 200 MHz.
6. Referensi
[1]. A.A. Lestari, A.B. Suksmono, E. Bharata,A.G. Yarovoy, L.P. Ligthart ,“Small UWBantenna with improved efficiency for pulse
radiation,” Proc. Int’l Workshop AntennaTechnology (IWAT05), Singapore, Mar.2005.
[2]. A.A. Lestari, Y.A. Kirana, A.B. Suksmono,A. Kurniawan, E. Bharata, A.G. Yarovoy,L.P. Ligthart, “Modified bow-tie antenna forefficient transmission of UWB pulses,”
Proc. 2004 Int’l Symp. Antennas
Propagation (ISAP 2004), vol. 1, pp. 521-524, Sendai, Japan, Aug. 2004.
[3]. A.A. Lestari, Y.A. Kirana, A.B. Suksmono,A. Kurniawan, E. Bharata, A.G. Yarovoy,L.P. Ligthart, “Compact UWB Radiator forShort-Range GPR Applications,” Proc. 10th
Int’l Conf. Ground Penetrating Radar (GPR
2004), vol. 1, pp. 141-144, Delft, The Netherlands, Jun. 2004.
[4]. L.P. Ligthart, A.G. Yarovoy, Y.A. Kirana,“GPR antenna simulations andoptimizations in time domain,” Proc. Int’l
Conf. Antenna Theory Techniques, pp. 21-24, Sevastopol, Ukraine, Sep. 2003.
Jakarta, 18 – 19 April 2007 66

8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 75/156
ProsidingSeminar Radar Nasional 2007
Beberapa Fitur pilihan pada Search-Radar yang diperlukan untuk
peningkatan Efektifitas Operasi Radar dalam Aplikasi
Pesawat Patroli Maritim
Heri Eka Permana *)
*) Staf di Dvisi Aircraft Development Center – PT. Dirgantara IndonesiaJl. Pajajaran 154, Bandung 40174 INDONESIA
phone: +62-22-6054453, fax: +62-22-6054284, Email :[email protected]
Abstract
Among the use of applied technology which is very feacible to be realized in Indonesia presently is to installa number of special avionics systems on the commuter tipe of aircrafts manufactured by own country aircraftindustry suited into maritime patrol aircrafts (MPA). These MPA are thuss fully prepared for conduting the patrol
mission with main mission for guarding the national water. One of the special avionics system for the MPA which isvery important is an airborne radar called Search Radar.
In order to improve the effectiveness of the use of the Search Radar in the MPA mission, it is important toensure some radar features such as sea clutter suppression, CFAR, pulse compression, frequency agility, ISAR,
track while scan fully applied. This will in turns offer better operability, reliability and performance.The featuresare desribed more in radar operation perspective.
Keywords : Sea clutter suppression, CFAR, Pulse Compression, Frequency Agility, ISAR, Track While Scan.
Abstrak
Salah satu pemanfaatan teknologi yang sangat dimungkinkan realisasinya di Indonesia kini adalah dengan
memasang sejumlah peralatan avionics khusus (sistem sensor) pada pesawat buatan dalam negeri yang mampumengudara sebagai pelaksana misi patroli maritim. Salah satu peralatan avionics khusus yang diperlukan oleh sebuah pesawat patroli maritime adalah Search radar.
Untuk meningkatkan efektifitas penggunaan Search radar diperlukan beberapa fitur pilihan seperti seaclutter suppression, CFAR, pulse compression, frequency agility, ISAR, track while scan sehingga memberikan
kemudahan, kehandalan, serta performansi yang optimal. Beberapa fitur ini dijelaskan dalam perspektif pengoperasian radar.
Kata kunci: Sea clutter suppression, CFAR, Pulse Compression, Frequency Agility, ISAR, Track While Scan.
1. Pendahuluan
Dengan kondisi alam wilayah NKRI yangterdiri atas pulau-pulau dengan luasan lautnyayang mencapai 2/3 dari total wilayah, maka pengawasan wilayah perairan menjadi
kebutuhan yang amat vital. Oleh karenanya penggunaan Maritime Patrol Aircraft (MPA) , yakni pesawat khusus untuk misi patroli maritim,dapat menjadi solusi. Mengingat luas perairanIndonesia sekitar 1.577.300 km persegi dengangaris pantai yang panjang totalnya mencapai54.716 km itu, ditengarai sangat rentan terhadap pencurian ikan dan kekayaan laut lainnya.
Oleh karena itu pengoperasian search radar
yang terpasang pada pesawat-pesawat MPAakan diperoleh luasan wilayah maritimIndonesia yang lebih besar lagi dibandingkan
jika hanya digunakan radar pantai saja, ataudengan radar kapal. Karena dengan karak-
teristik khas dari pesawat terbang, peman-tauandari ketinggian memberikan jarak pan-danglebih jauh. Pemantauan maritimpun dilakukansecara cepat, sehingga memung-kinkan untukmenyapu area-area yang ter-sebar. Dengankecepatan pesawat juga me-mungkinkan untuk
reaksi lebih cepat pula.Sejumlah pesawat khusus untuk misi Patroli
Maritim yang diproduksi oleh PT. DirgantaraIndonesia (PTDI) desain awalnya merupakan pesawat angkut sipil yang dikembangkan lebihlanjut serta diper-lengkapi dengan sejumlah peralatan avionics (aviation electronics) sepertiSearch Radar , FLIR/TV , Camera, Video
Recorder , ESM , IRS/GPS , FMS dan lain-lain.Dari sekian itu, search radar merupakan perlatan avionic yang mempunyai peranancukup vital untuk tugas pemantauan teritorial,
karena kemampuannya mendeteksi target-targetdi permukaan laut seperti kapal tanker, oil-rig,
Jakarta, 18 – 19 April 2007 67
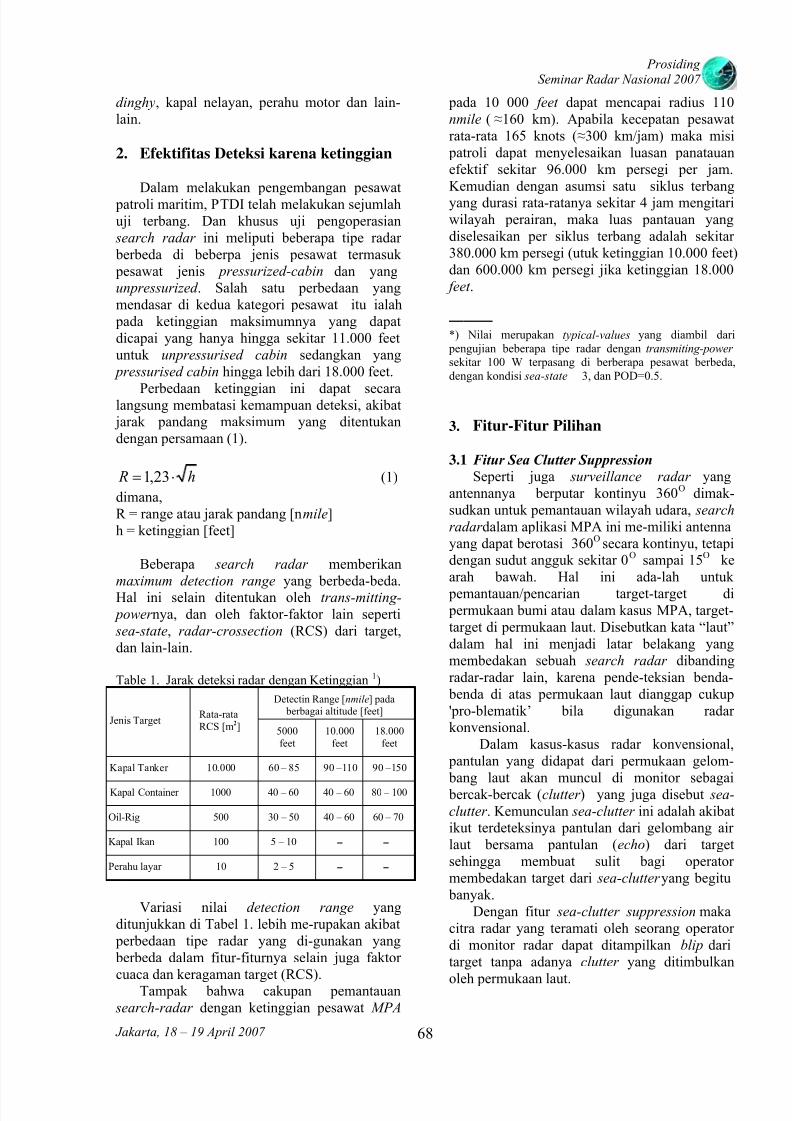
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 76/156
ProsidingSeminar Radar Nasional 2007
dinghy, kapal nelayan, perahu motor dan lain-lain.
2. Efektifitas Deteksi karena ketinggian
Dalam melakukan pengembangan pesawat patroli maritim, PTDI telah melakukan sejumlahuji terbang. Dan khusus uji pengoperasian
search radar ini meliputi beberapa tipe radar berbeda di beberpa jenis pesawat termasuk pesawat jenis pressurized-cabin dan yangunpressurized . Salah satu perbedaan yangmendasar di kedua kategori pesawat itu ialah pada ketinggian maksimumnya yang dapatdicapai yang hanya hingga sekitar 11.000 feetuntuk unpressurised cabin sedangkan yang
pressurised cabin hingga lebih dari 18.000 feet.
Perbedaan ketinggian ini dapat secaralangsung membatasi kemampuan deteksi, akibat jarak pandang maksimum yang ditentukandengan persamaan (1).
h R ⋅= 23,1 (1)
dimana,R = range atau jarak pandang [nmile]h = ketinggian [feet]
Beberapa search radar memberikanmaximum detection range yang berbeda-beda.Hal ini selain ditentukan oleh trans-mitting-
power nya, dan oleh faktor-faktor lain seperti sea-state, radar-crossection (RCS) dari target,dan lain-lain.
Table 1. Jarak deteksi radar dengan Ketinggian 1)
Detectin Range [nmile] pada berbagai altitude [feet]
Jenis TargetRata-rataRCS [m2] 5000
feet10.000
feet18.000
feet
Kapal Tanker 10.000 60 – 85 90 –110 90 –150
Kapal Container 1000 40 – 60 40 – 60 80 – 100
Oil-Rig 500 30 – 50 40 – 60 60 – 70
Kapal Ikan 100 5 – 10 – –
Perahu layar 10 2 – 5 – –
Variasi nilai detection range yangditunjukkan di Tabel 1. lebih me-rupakan akibat perbedaan tipe radar yang di-gunakan yang berbeda dalam fitur-fiturnya selain juga faktorcuaca dan keragaman target (RCS).
Tampak bahwa cakupan pemantauan search-radar dengan ketinggian pesawat MPA
pada 10 000 feet dapat mencapai radius 110nmile ( ≈160 km). Apabila kecepatan pesawatrata-rata 165 knots (≈300 km/jam) maka misi patroli dapat menyelesaikan luasan panatauanefektif sekitar 96.000 km persegi per jam.Kemudian dengan asumsi satu siklus terbangyang durasi rata-ratanya sekitar 4 jam mengitariwilayah perairan, maka luas pantauan yangdiselesaikan per siklus terbang adalah sekitar380.000 km persegi (utuk ketinggian 10.000 feet)dan 600.000 km persegi jika ketinggian 18.000
feet .
———*) Nilai merupakan typical-values yang diambil dari pengujian beberapa tipe radar dengan transmiting-powersekitar 100 W terpasang di berberapa pesawat berbeda,dengan kondisi sea-state 3, dan POD=0.5.
3. Fitur-Fitur Pilihan
3.1 Fitur Sea Clutter Suppression
Seperti juga surveillance radar yangantennanya berputar kontinyu 360O dimak-sudkan untuk pemantauan wilayah udara, search
radar dalam aplikasi MPA ini me-miliki antennayang dapat berotasi 360O secara kontinyu, tetapidengan sudut angguk sekitar 0O sampai 15O kearah bawah. Hal ini ada-lah untuk
pemantauan/pencarian target-target di permukaan bumi atau dalam kasus MPA, target-target di permukaan laut. Disebutkan kata “laut”dalam hal ini menjadi latar belakang yangmembedakan sebuah search radar dibandingradar-radar lain, karena pende-teksian benda- benda di atas permukaan laut dianggap cukup'pro-blematik’ bila digunakan radarkonvensional.
Dalam kasus-kasus radar konvensional, pantulan yang didapat dari permukaan gelom- bang laut akan muncul di monitor sebagai bercak-bercak (clutter ) yang juga disebut sea-
clutter . Kemunculan sea-clutter ini adalah akibatikut terdeteksinya pantulan dari gelombang airlaut bersama pantulan (echo) dari targetsehingga membuat sulit bagi operatormembedakan target dari sea-clutter yang begitu banyak.
Dengan fitur sea-clutter suppression makacitra radar yang teramati oleh seorang operatordi monitor radar dapat ditampilkan blip daritarget tanpa adanya clutter yang ditimbulkan
oleh permukaan laut.
Jakarta, 18 – 19 April 2007 68
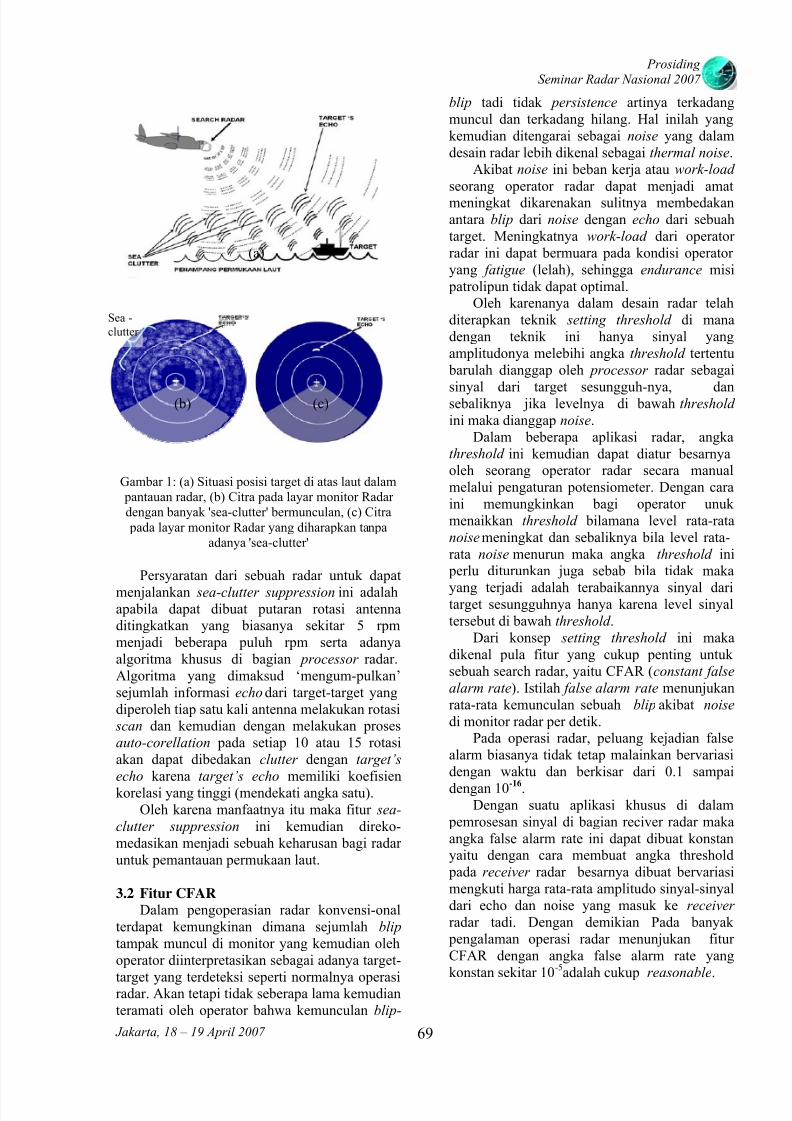
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 77/156
ProsidingSeminar Radar Nasional 2007
(a)
(b) (c)
Oleh karenanya dalam desain radar telahditerapkan teknik setting threshold di manadengan teknik ini hanya sinyal yangamplitudonya melebihi angka threshold tertentu barulah dianggap oleh processor radar sebagai
sinyal dari target sesungguh-nya, dansebaliknya jika levelnya di bawah threshold
ini maka dianggap noise.
Gambar 1: (a) Situasi posisi target di atas laut dalam pantauan radar, (b) Citra pada layar monitor Radardengan banyak 'sea-clutter' bermunculan, (c) Citra pada layar monitor Radar yang diharapkan tanpa
adanya 'sea-clutter'
Persyaratan dari sebuah radar untuk dapat
menjalankan sea-clutter suppression ini adalahapabila dapat dibuat putaran rotasi antennaditingkatkan yang biasanya sekitar 5 rpmmenjadi beberapa puluh rpm serta adanyaalgoritma khusus di bagian processor radar.Algoritma yang dimaksud ‘mengum-pulkan’sejumlah informasi echo dari target-target yangdiperoleh tiap satu kali antenna melakukan rotasi
scan dan kemudian dengan melakukan prosesauto-corellation pada setiap 10 atau 15 rotasiakan dapat dibedakan clutter dengan target’s
echo karena target’s echo memiliki koefisienkorelasi yang tinggi (mendekati angka satu).
Oleh karena manfaatnya itu maka fitur sea-
clutter suppression ini kemudian direko-medasikan menjadi sebuah keharusan bagi radaruntuk pemantauan permukaan laut.
3.2 Fitur CFAR
Dalam pengoperasian radar konvensi-onalterdapat kemungkinan dimana sejumlah blip
tampak muncul di monitor yang kemudian olehoperator diinterpretasikan sebagai adanya target-
target yang terdeteksi seperti normalnya operasiradar. Akan tetapi tidak seberapa lama kemudianteramati oleh operator bahwa kemunculan blip-
blip tadi tidak persistence artinya terkadangmuncul dan terkadang hilang. Hal inilah yangkemudian ditengarai sebagai noise yang dalamdesain radar lebih dikenal sebagai thermal noise.
Akibat noise ini beban kerja atau work-load
seorang operator radar dapat menjadi amatmeningkat dikarenakan sulitnya membedakanantara blip dari noise dengan echo dari sebuahtarget. Meningkatnya work-load dari operatorradar ini dapat bermuara pada kondisi operatoryang fatigue (lelah), sehingga endurance misi patrolipun tidak dapat optimal.
Dalam beberapa aplikasi radar, angkathreshold ini kemudian dapat diatur besarnyaoleh seorang operator radar secara manualmelalui pengaturan potensiometer. Dengan caraini memungkinkan bagi operator unukmenaikkan threshold bilamana level rata-ratanoise meningkat dan sebaliknya bila level rata-rata noise menurun maka angka threshold ini perlu diturunkan juga sebab bila tidak maka
yang terjadi adalah terabaikannya sinyal daritarget sesungguhnya hanya karena level sinyaltersebut di bawah threshold .
Dari konsep setting threshold ini makadikenal pula fitur yang cukup penting untuksebuah search radar, yaitu CFAR (constant false
alarm rate). Istilah false alarm rate menunjukanrata-rata kemunculan sebuah blip akibat noise
di monitor radar per detik.Pada operasi radar, peluang kejadian false
alarm biasanya tidak tetap malainkan bervariasidengan waktu dan berkisar dari 0.1 sampai
dengan 10-16.Dengan suatu aplikasi khusus di dalam
pemrosesan sinyal di bagian reciver radar makaangka false alarm rate ini dapat dibuat konstanyaitu dengan cara membuat angka threshold pada receiver radar besarnya dibuat bervariasimengkuti harga rata-rata amplitudo sinyal-sinyaldari echo dan noise yang masuk ke receiver
radar tadi. Dengan demikian Pada banyak pengalaman operasi radar menunjukan fiturCFAR dengan angka false alarm rate yangkonstan sekitar 10
-5 adalah cukup reasonable.
Sea -
clutter
Jakarta, 18 – 19 April 2007 69
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 78/156
ProsidingSeminar Radar Nasional 2007
3.3 Fitur Pulse Compression
Pada umumnya search radar meru-pakanradar pulsa, artinya di dalam pende-teksiankeberadaan target serta jaraknya memanfaatkangelombang carier yang dipan-caran dan diterimaoleh antenna akibat pe-mantulan dari target-target. Gelombang carier yang digunakandibentuk sebagai pulsa-pulsa yang oleh antennadipancarkan ke segala arah dengan melaluirotasi antenna. Radar dikatakan mendeteksiadanya suatu target di suatu sektor tertentuadalah apabila processor di bagian receiver
radar berhasil mengkorelasikan sejumlah pulsa pantulan dari target (echo) dengan mencocokaninterval waktu antar pulsa serta tenggang waktu(delay) kedatangan pula-pulsa echo yang bersesuaian pada sektor tersebut.
Untuk memproleh daya pemisah pada arahazimuth ( cross-range resolution) banyak search
radar didesain dengan antenna yangmemungkinkan menghasilkan lebar berkasgelombang carier (beam-width) yang hinggasesempit 3o saja.
Ketika antenna yang digunakan meman-carkan pulsa ini diulang-ulang sampai ra-tusan pulsa terpancar dan kembali di setiap sektor arahrotasi antena, maka suatu target akanmendapatkan iluminasi pulsa sertamemantulkannya dalam ratusan pulsa pula pada
satu sektor tertentu. Semakin banyak jumlahderetan pulsa yang didapat tentu peluangterjadinya deteksi atau probability of detection
(POD) juga meningkat.Persoalan yang sering muncul dalam
pengoperasian radar adalah tidak hanya POD,serta cross-range resolution yang tinggimelaikan seberapa jangkauan deteksi yang bisaditawarkan serta berapa range resolution.Dimana range resolution ini berhubungandengan daya pembeda atas target-target yanglokasinya berdekatan satu dengan lainnya pada
arah radial. Salah satu contoh skenario lain didalam misi patroli maritim adalah seperti yangdiilustrasikan pada gambar 2. dimana ada duatarget yang lokasinya pada bearing yang samatetapi terpisahkan satu dengan lainnya hanyaterpaut 150 m, maka yang sering terjadi padamonitor radar hanya muncul satu blip saja. Iniartinya pulse-widthnya tidak cukup sempit. Halini terkait dengan kenyataan dalam pemancarangelombang mikro yang dimodulasikan dalam bentuk pulsa-pulsa, dimana pemancaran energiyang dibawa pulsa sebanding dengan pulse-
width ( τ) besarnya berbanding terbalik dengan
band-width dari gelombang carier mengikuti per-samaan (2) dan (3).
ρ =c τ
2 (2)
ρ = c2 B (3)
dimana,ρ = resolusi ( range resolution)c = cepat rambat gelombang elektromagnetik
τ = lebar pulsa ( pulse width)B = band width
Tetapi bila pulse-widthnya dibuat lebihsempit lagi akibatnya jarak deteksi menurun,sebab dengan pulse-width yang sempit energi
lebih kecil dan cepat menga-lami attenuasi disaat propagasinya. Terlihat di sini ada dua halyang tampaknya saling kontradiksi antara peningkatan jarak deteksi dengan range
resolution. Meskipun secara teoritis mengikuti persamaan (4) jarak jangkauan deteksi dapatditingkatkan dengan yang tiga hal yang dapat,yakni melalui peningkatan transmiting power,
antenna gain dan sensitivity.
)()4( 3
24
maxSNR F
LGG P R S r t t
π
σλ = (4)
dimana,R max = Maximum detection range [m]Pt = transmitting power [dBm]Gt = gain pada sisi receiver [dB ]Gr = gain pada sisi receiver [dB]Ls = losses [dB ]σ = RCS[m 2]λ = panjang gelombang [m]F = Noise Figure [dBm]SNR = Signal to Noise Ratio [dB]
Namun dalam kenyataannya dua para-meter pertama tadi merupakan besaran yangkhususnya dalam aplikasi pesawat terbangmengalami kendala-kendala mengingat dayalistrik yang dibatasi oleh kapasitas alternatoryang memungkinkan untuk sebuah pesawatterbang. Demikian pula dengan antenna gain
yang berkaitan dengan dimensi antenna, hal ini juga merupakan kendala khas dari aplikasi di pesawat terbang dimana dimensi serta beratadalah sangat dibatasi agar pesawat tidakterkena penalti pada performansi terbangnya.
Sementara itu, sensitivity sering dianggap bersifat given untuk jenis receiver tertentu.
Jakarta, 18 – 19 April 2007 70

8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 79/156
ProsidingSeminar Radar Nasional 2007
Oleh karena itu perlu diterapkan tekniktersendiri untuk melakukan optimasi antara jarakdeteksi dan range resolution yang telahditawarkan dalam teknik pulse compresion yang bisa juga dipandang sebagai fitur tersendiri.
(a)
(b) (c)
Gambar 2. (a) Situasi posisi kedua buah target yang bedekatan dalam pantauan search radar (b) Citra padamonitor Radar yang muncul sebagai satu 'blip' saja (c)
Citra pada monitor Radar seperti yang diharapkantanpa dimana dua buah blip yang terpisah.
Pulse compression ini telah dimung-kinkan berkat adanya kemajuan di teknologi transmiter dan processor yang terus berkembang. Diantaranya dengan adanya transmiter danmicrowave-amplifier yang solid-state jenis TWT
(travelling wave tube). Dibandingkan denganradar konvensional yang masih menggunakantransmiter sekaligus dari jenis magnetron, makadengan amplifier TWT dimungkinkan bagisebuah search radar untuk melakukan berbagaihal. Di antaranya menjadi mudah memanipulasi banyak parameter radar seperti pulse-width
(PW), pulse repetition interval (PRI), sampaimemvariasikan frekuensi gelombang carier .
Karena frekuensi gelombang carier da-patdivariasikan, maka satu pulsa dengan pulsa berikutnya bisa dibentuk dari gelom-bang carier
pada frekuensi yang berbeda, bahkan satu pulsa
dapat dibentuk dari gelom-bang carier dengan beberapa nilai frekuensi.
Hal ini yang dilakukan dalam teknik Pulse
compression, dimana setiap pulsa dibentuk darigelombang carier frekuensinya yang bervariasisecara linear terhadap lebar pulsa ( FM-
modulation). Dengan variasi frekuensi dalamtiap pulsa maka pembang-kitan pulsa di sisitransmiter tidak harus sempit, karena denganadanya FM-modu-lation ini satu pulsa yanglebar akan ’dibagi-bagi’ dalam satuan yang lebihkecil sesuai dengan banyaknya perubahanfrekuensi.
Sebagai contoh pulsa yang dibangkitkandengan lebar normal 10 mikro detik dapat di jadikan sesempit 20 nano detik yang tentunyaharus digunakan jalur pendispersi. Jalur ini
biasanya menggunakan prinsip surface acousticwave (SAW) yang dapat memungkinkan untukmenunda sebahagian pulsa serambi lebih depanagar ’ditumpuk’ di ujung jalur transmisi dengansisa sebagian pulsa yang lebih belakang. Dengan penum-pukan ini dapat dimungkinkan pulsa- pulsa yang terpancar dari antenna memiliki peak
power tinggi (karena ditumpuk) dan sekaligusmenyempitkan pulse-width.
Jalur pendispersi ini ditempatkan di duatempat yakni setelah transmiter dan sebelumreceiver dengan tujuan untuk melakukan
rekonstruksi baik saat sebelum dipancarkanmaupun ketika pantulan yang kembali diterimaantenna sesaat sebelum masuk ke receiver .
3.4 Fitur Frequency Agility
Dengan memanfaatkan transmiter jenisTWT yang memungkinkan bagi pembang-kitangelombang carier dengan frekuensi yangdiubah-ubah ini, maka bisa menambah fitur lainyang berkenaan dengan perubahan frekuensigelombang carier yakni fitur frequency agility.
Manfaat Fitur frequency agility sebenarnya
tidak secara langsung berkaitan dengandetection performance dari radar. Akan tetapi bila dikaitkan dengan situasi operasi searchradar yang diperuntukan bagi operasi militer juga, maka ada kebutuhan dari operasi radaragar dapat tetap effektif beroperasi tanpa adanyagangguan jamming oleh kekuatan lawan.
Pada prakteknya, seorang operator radardiberikan akses untuk memilih kombinasi 3sampai 20 frekuensi gelombang carier yang iainginkan di suatu saat tertentu, dan kombina-sinya dapat ia ubah dengan 3 atau 4 macamkombinasi frekuensi lainnya di waktu lain.Dengan demikian, kemungkinan pihak lawan
Jakarta, 18 – 19 April 2007 71

8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 80/156
ProsidingSeminar Radar Nasional 2007
untuk dapat melakukan jamming pada frekuensitertentu akan dapat diperkecil.
Dalam rangka memperkecil peluang bagilawan melakukan jamming teknik lain jugadiberlakukan di dalam search radar yangemnggunakan transmiter serta amplifier yang
solid-state seperti pada jenis TWT ini yaitudengan memvariasikan PRI. Dengan demikianakan lebih sulit lagi jamming dilakukan. Teknikmemvariasikan PRI ini dikenal pula dengan
pulse repetition frequency (PRF) agility.
3.5 Fitur ISAR
Kemampuan ISAR sangat membantuoperator di pesawat patroli maritim dalammelakukan identifikasi atau recognition target-target melalui citra sintetik yang dihasilkan oleh
radar yang berkemampuan ISAR. Citra sintetikseperti yang diilus-trasikan pada gambar 3.semacam silhouette dari target yang di survey iniditampilkan pada sebuah window terpisah dimonitor setelah beberapa detik posisi antenna berhenti sejenak mengarah ke target yangdi survey tadi. Pada saat citra ISAR dari suatutarget telah terbentuk maka antenna segera berotasi kembali guna mlanjutkan proses search,sementara citra silhouette tadi dibuat freeze padawindow tersendiri untuk evaluasi lanjutanhingga kemudian akan terhapus saat dilakukan
kembali proses survey ISAR pada target berikutnya.
Kamampuan ISAR dirasakan banyakmembantu operator dikarenakan proses iden-tifikasi atau recognition atas target bisadilakukan meski jaraknya masih sekitar 80 kmdi mana unaided eye observation masihtidak dimungkinkan. Meskipun citra silhouette
yang didapat tidaklah persis seperti citra yang biasa didapat dari sebuah camera, akan tetapiuntuk seorang operator yang terlatih, citra ISARini telah cukup memberikan informasi tentang
target sehinga cukup confident untuk dikatakanapakah target tersebut dari jenis kapal tankeratau kapal perang, misalnya.
(a)
(b)
Gambar 3. (a) Citra ISAR (citra sintetik) yang muncul pada monitor Radar seperti silhouette (b) Foto dari
target yang diambil dengan kamera
3.6 Fitur Track While Scan(TWS)
Kemampuan lain yang disebut TWS jugadirasakan sangat membantu operator pesawat patroli maritim dalam melakukan pemantauan
atas sejumlah target yang tersebar luas di atas perairan. Dalam area tersebut target-target bisasa berupa kapal-kapal yang jumlahnya bisademikian padat hingga 100 target atau bahkanlebih. Hal ini tentunya bagi operator radar cukupmeningkatkan work-load nya jika terus menerusharus mengikuti (tracking ) puluhan sejumlahtarget tersebut.
Dengan fitur TWS seorang operator dapatmemberi nomor identitas atas target-targettertentu yang dianggap ‘menarik’ ataumencurigakan untuk dievaluasi. Kemudianmelalui processornya radar yang dilengkapi fiturTWS ini akan menginformasikan kecepatanserta arah haluan target setiap saat.
Prinsip kerja tracking pada fitur TWS ini berbeda dengan pengertian tracking yangdimiliki oleh radar pengendalian misile dimanaarah antennanya terus menerus mengikuti arahmisile, adapun kemampuan TWS dalam search
radar ini antenanya tetap berotasi secarakontinyu memonitor seluruh sector. Hal inidimungkinkan karena di dalam memori
processor dari search radar ini tersimpansejumlah posisi dari target-target yang telahditandai oleh operator tadi dan posisi-posisi initerus menerus diupdate sehingga prubahan demi perubahan posisi target memberikan informasikecepatan serta arah haluan.
Dengan otomatisai yang ditawarkan fiturTWS ini dapat menurunkan work-load darioperator radar, sehingga dapat mencegahoperator mencapai kondisi fatigue yang padaakhirnya meningkatkan ‘endurance’ operatortersebut.
Jakarta, 18 – 19 April 2007 72

8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 81/156
ProsidingSeminar Radar Nasional 2007
4. Kesimpulan
Untuk melakukan patroli atas wilayahmaritim Indonesia yang demikian luas penggunaan search-radar yang dipasang di pesawat terbang dapat menjadi solusi yang tepatkarena dengan ketinggian serta kecepatan pergerakan pesawat membuat cakupan pemantauan laut menjadi sangat luas jikadibandingkan dengan ground based radar
maupun shipborne radar .Untuk memperoleh efektifitas pengo-
perasian search radar di pesawat patrolimaritime sangat direkomendasikan untukmemastikan fitur-fitur radar seperti sea clutter
suppression, CFAR, pulse compression,
frequency agility, ISAR, dan Track While Scan
diimplementasikan.
5. Ucapan TerimakasihUcapan terimakasih disampaikan kepada
Bapak Andi Alisjahbana dan Bapak RangsangWiwaswan selaku Management P.T. DI. Juga
kepada Bapak Sugeng Wiyono dan Bapak MulaWarman Wangsaputra selaku specialis avionikyang telah memberikan masukan-masukan untuk penulisan makalah ini.
6. Referensi
[1] Allen, Chris, 'Radar Pulse Compression’Information and TelecommunicationTechnology Center, June 2004.
[2] Edde, Byron. Radar Principles, Technology,Applications, Prentice-Hall Inc. New Jersey,1993.
[3] Gardner, W. J. R., Anti Submarine Warfare,Royal naval College, London 1996.
[4] Kingsley, S. and Quegan S., Understandingradar Systems, McGraw-Hill, London, 1996.
[5] Hovanessian, S.A. ‘Radar System DesignAnalysis’ Artech House, Inc., Northwood,MA, 1984
[6] ‘Down to Earth’ Magazine No. 45,May2000: Coastal Resources – Jakarta, 2000
Jakarta, 18 – 19 April 2007 73

8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 82/156
Prosiding
Seminar Radar Nasional 2007
State Feedback Robust Tracking Controller
Based on Preview- Control Approach∞ H
Estiko Rijanto
Pusat Penelitian Tenaga Listrik dan Mekatronik (Puslit Telimek),LEMBAGA ILMU PENGETAHUAN INDONESIA (LIPI),
Research Center for Electrical Power and Mechatronics,INDONESIAN INSTITUTE OF SCIENCES,
Jl. Cisitu No.21/154D, Bandung 40135, Indonesia; email: [email protected].
Abstrak
Di dalam makalah ini diusulkan sebuah metoda baru merancang pengendali tracking menggunakan
pendekatan kendali preview- (H tak terhingga). Nama kendali preview- pada makalah ini memiliki arti
kombinasi antara teori kendali preview dan teori kendali . Dengan mengasumikan bahwa jalur lintasan
objek radar dapat diprediksi untuk beberapa waktu pencuplikan ke depan, maka informasi tentang sinyal
referensi masa depan ini dapat digunakan untuk membuat pengendali trakcing yang memiliki kinerja yang lebihbaik. Di lain pihak, teori kendali digunakan untuk membuat sistem kendali lebih kokoh (robust) terhadap
gangguan internal maupun eksternal seperti gaya tiupan angin. Pada makalah ini tata kendali umpan balik
keadaan telah diformulasikan berdasarkan prinsip maksimum dan teori defferential game. Selain itu, hubungan
antara fungsi pinalti dan -norm juga telah dianalisa.
∞ H ∞ H
∞ H
∞ H
∞ H
Kata kunci: umpan balik keadaan, kokoh, tracking, pengendali, preview, kendali kokoh (tak terhingga),
radar, target, lintasan, jalur.∞ H
Abstract
This paper proposes a novel design method of a state feedback robust tracking controller based on preview-
(infinity) control approach. The name of preview- control in this paper implies the combination between
preview control theory and control theory. By assuming that the radar target future travel path can be
predicted for certain number of sampling period, the future information of reference signal can be utilized to
construct a tracking controller with better tracking performance. On the other hand, the control theory has
been used to make the control system more robust against internal and external disturbances including wind
force. The formulation of state feedback preview- control law has been carried out by the use of the
maximum principle and differential game theory. Moreover, the relation between the cost function and -
norm criterion has been analyzed.
∞
H ∞
H
∞ H
∞ H
∞ H
∞ H
Key words: state feedback, robust, tracking, controller, preview, control, radar, target, travel, path.∞ H
1. Introduction
A tracking radar should follows the position of one or more objects in space,ignoring the content of the space not occupied by the target(s) being tracked. In Single TargetTrack (STT) the radar follows a single objectand ignores all others. In Multi Target Track(MTT) the radar continuously monitors the position of several targets, with each targetsampled many times per second.Effectively,one radar performs the function of
as many tracking radars as there are targets being tracked. Multi-target tracking requires
that the antenna’s beam position be changeableessentially instantaneously, and this isnormally possible only with electronicallyscanned antennas. For true tracking to take place, the target(s) must be sampled at the Nyquist rate for the track servo bandwidth andtarget maneuvering bandwidths [1].
By the use of the so called β α − filter
whose parameters are tuned using the Kalmanfilter algorithm the radar target travel path can be predicted [2]. When the radar target travel path undergoes totally unpredictable high-Gmaneuvers it is often desired to use multipletracking gates [3].
74
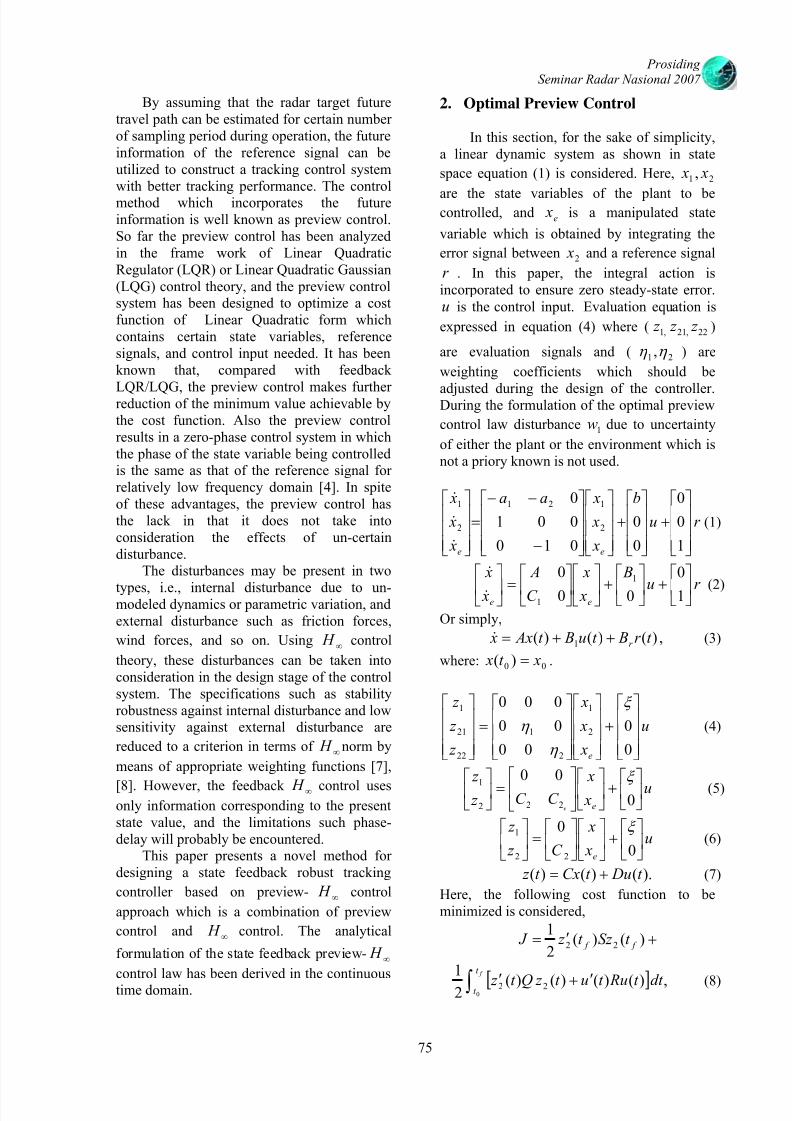
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 83/156
ProsidingSeminar Radar Nasional 2007
By assuming that the radar target futuretravel path can be estimated for certain numberof sampling period during operation, the futureinformation of the reference signal can beutilized to construct a tracking control systemwith better tracking performance. The controlmethod which incorporates the futureinformation is well known as preview control.So far the preview control has been analyzedin the frame work of Linear QuadraticRegulator (LQR) or Linear Quadratic Gaussian(LQG) control theory, and the preview controlsystem has been designed to optimize a costfunction of Linear Quadratic form whichcontains certain state variables, referencesignals, and control input needed. It has beenknown that, compared with feedback
LQR/LQG, the preview control makes furtherreduction of the minimum value achievable bythe cost function. Also the preview controlresults in a zero-phase control system in whichthe phase of the state variable being controlledis the same as that of the reference signal forrelatively low frequency domain [4]. In spiteof these advantages, the preview control hasthe lack in that it does not take intoconsideration the effects of un-certaindisturbance.
The disturbances may be present in two
types, i.e., internal disturbance due to un-modeled dynamics or parametric variation, andexternal disturbance such as friction forces,
wind forces, and so on. Using control
theory, these disturbances can be taken intoconsideration in the design stage of the controlsystem. The specifications such as stabilityrobustness against internal disturbance and lowsensitivity against external disturbance are
reduced to a criterion in terms of norm by
means of appropriate weighting functions [7],
[8]. However, the feedback control usesonly information corresponding to the presentstate value, and the limitations such phase-delay will probably be encountered.
∞ H
∞ H
∞ H
This paper presents a novel method fordesigning a state feedback robust tracking
controller based on preview- control
approach which is a combination of preview
control and control. The analytical
formulation of the state feedback preview-
control law has been derived in the continuoustime domain.
∞ H
∞ H
∞ H
2. Optimal Preview Control
In this section, for the sake of simplicity,a linear dynamic system as shown in state
space equation (1) is considered. Here,
are the state variables of the plant to becontrolled, and is a manipulated state
variable which is obtained by integrating the
error signal between and a reference signal
21 , x x
e x
2 x
r . In this paper, the integral action isincorporated to ensure zero steady-state error.
is the control input. Evaluation equation is
expressed in equation (4) where ( )
are evaluation signals and (
u
22,21,1 z z z
21 ,η η ) are
weighting coefficients which should be
adjusted during the design of the controller.During the formulation of the optimal preview
control law disturbance due to uncertainty
of either the plant or the environment which isnot a priory known is not used.
1w
r u
b
x
x
xaa
x
x
x
ee ⎥
⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−
−−
=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
1
0
0
0
0
010
001
0
2
121
2
1
&
&
&
(1)
(2)r u
B
x
x
C
A
x
x
ee ⎥⎦
⎤
⎢⎣
⎡
+⎥⎦
⎤
⎢⎣
⎡
+⎥⎦
⎤
⎢⎣
⎡
⎥⎦
⎤
⎢⎣
⎡
=⎥⎦
⎤
⎢⎣
⎡
1
0
00
0 1
1&
&
Or simply,
,)()()( 1 t r Bt u Bt Ax x r ++=& (3)
where: 00 )( xt x = .
u
x
x
x
z
z
z
e ⎥
⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
0
0
00
00
000
2
1
2
1
22
21
1 ξ
η
η (4)
(5)u x
x
C C z
z
ee
⎥⎦⎤⎢⎣⎡+⎥⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡=⎥⎦
⎤⎢⎣
⎡
0
00
222
1
ξ
(6)u x
x
C z
z
e
⎥⎦
⎤⎢⎣
⎡+⎥
⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡
0
0
22
1 ξ
).()()( t Dut Cxt z += (7)
Here, the following cost function to beminimized is considered,
+′= )()(2
122 f f t Sz t z J
[ ] ,)()()()(2
1
022 dt t Rut ut z Qt z
f t
t ∫ ′+′ (8)
75
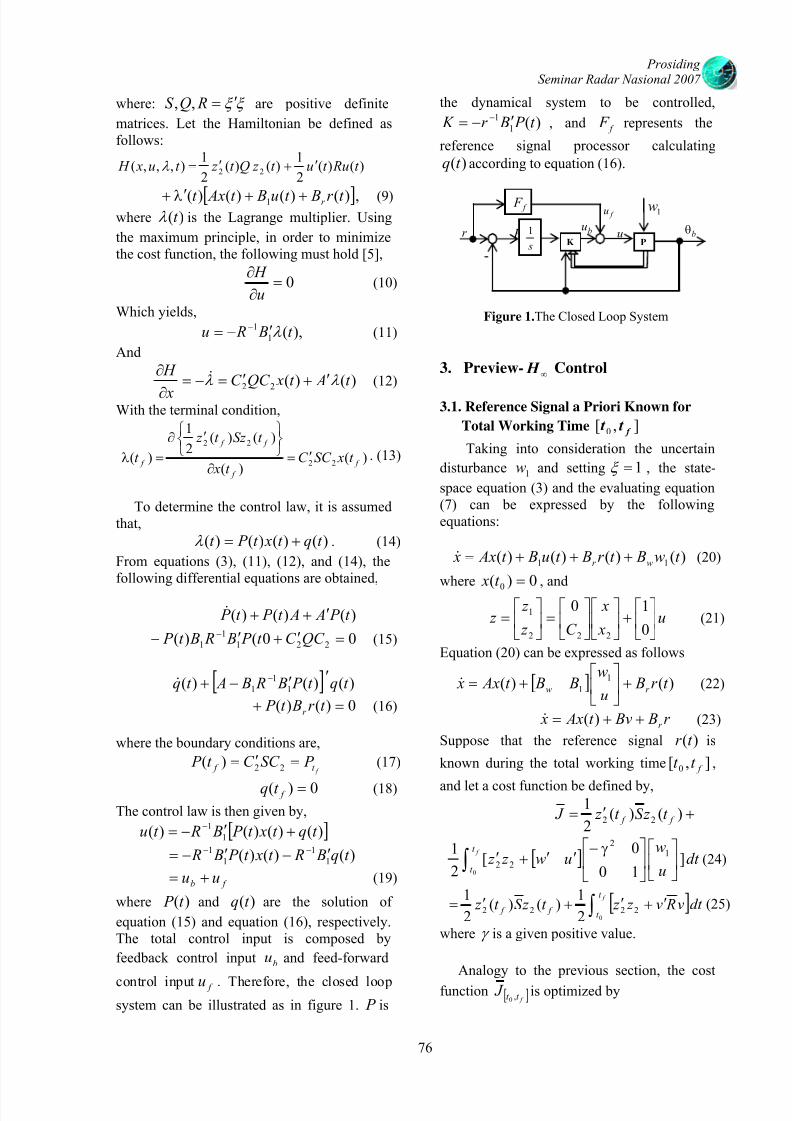
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 84/156
ProsidingSeminar Radar Nasional 2007
where: ξ ξ ′= RQS ,, are positive definite
matrices. Let the Hamiltonian be defined asfollows:
)()(2
1)()(
2
1),,,( 22 t Rut ut z Qt z t u x H ′+′=λ
[ ],)()()()( 1 t r Bt u Bt Axt r ++λ′+ (9)where )(t λ is the Lagrange multiplier. Using
the maximum principle, in order to minimizethe cost function, the following must hold [5],
0=∂∂
u
H (10)
Which yields,
u (11)),(1
1 t B R λ ′−= −
And
)()(22 t At xQC C
x
H λ λ ′+′=−=
∂
∂& (12)
With the terminal condition,
)()(
)()(2
1
)( 22
22
f
f
f f
f t xSC C t x
t Sz t z
t ′=∂
⎭⎬⎫
⎩⎨⎧ ′∂
=λ . (13)
To determine the control law, it is assumedthat,
)()()()( t qt xt P t +=λ . (14)
From equations (3), (11), (12), and (14), thefollowing differential equations are obtained,
)()()( t P A At P t P ′++&
(15)00()( 221
1
1 =′+′− − QC C t P B R Bt P
[ ] )()()( 1
1
1 t qt P B R B At q ′′−+ −&
0)()( =+ t r Bt P r (16)
where the boundary conditions are,
(17) f t f P SC C t P =′= 22)(
(18)0)( = f t q
The control law is then given by,
[ ])()()()( 1
1 t qt xt P B Rt u +′−= −
)()()( 1
1
1
1 t q B Rt xt P B R ′−′−= −−
(19) f b uu +=
where and are the solution of
equation (15) and equation (16), respectively.The total control input is composed by
feedback control input u and feed-forward
control input . Therefore, the closed loopsystem can be illustrated as in figure 1. P is
the dynamical system to be controlled,
, and F represents the
reference signal processor calculating
according to equation (16).
)(t P )(t q
b
f u
)(1
1 t P Br K ′−= − f
)(t q
f u
bu
f F
f F s
1
K P
1w
bθ
u
r
-
Figure 1. The Closed Loop System
3. Preview- Control∞ H
3.1. Reference Signal a Priori Known for
Total Working Time [ ],0 f t t
Taking into consideration the uncertain
disturbance and setting1w 1=ξ , the state-
space equation (3) and the evaluating equation(7) can be expressed by the followingequations:
)()()()( 11 t w Bt r Bt u Bt Ax x wr +++=& (20)
where 0)(0
=t x , and
(21)u x
x
C z
z z ⎥
⎦
⎤⎢⎣
⎡+⎥
⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡=
0
10
222
1
Equation (20) can be expressed as follows
(22)[ ] )()(1
1 t r Bu
w B Bt Ax x r w +⎥
⎦
⎤⎢⎣
⎡+=&
r B Bvt Ax x r ++= )(& (23)
Suppose that the reference signal r is
known during the total working time [ ,
and let a cost function be defined by,
)(t
],0 f t t
+′= )()(2
122 f f t z S t z J
[ ] dt u
wuw z z
f t
t ]
10
0[
2
1 12
220
⎥⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡ γ−′′+′∫ (24)
[ ]dt v Rv z z t z S t z f t
t f f ∫ ′+′+′=
02222
2
1)()(
2
1(25)
where γ is a given positive value.
Analogy to the previous section, the cost
function [ f t t J ,0 ] is optimized by
76

8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 85/156
ProsidingSeminar Radar Nasional 2007
)()()()( 22
1 t q Bt xt P Bt w ww ′+′= −−
γ γ (26)
)()()()( 11 t q Bt xt P Bt u ′−′−= , (27)
where )(),( t qt P are solutions of the
following differential equations,
)()()( t P A At P t P ′++&
0)()( 22
2
11 =′+′−′− − C C t P B B B Bt P wwγ (28)
[ ] )()()()( 2
11 t qt P B B B B At q ww
′′γ−′−+ −&
0)()( =+ t r Bt P r (29)
The boundary conditions are,
0)( 22 >′= C S C t P f (30)
0)( = f t q . (31)
In order to analyze the relationship
between the cost function and -norm
criterion, the following mathematicaldefinition is introduced [6].
∞ H
1)],0[
2
20
2 )(T
T
wdt ww z z ε−≤′γ−′∫
γ <⇔],0[ T w
z
2)],0[
2
20
2 )(T
wdt ww z z ε−≤′γ−′∫∞
γ <⇔ ∞w
z
where ε is a small positive parameter.
When the transfer function matrix from
uncertain disturbance to the evaluation
signal is denoted by1w
z
)()(
)(
1
sT sw
s z zw= (32)
the design criterion in terms of -norm can
be expressed as follows∞ H
γ <∞ zwT . (33)According to the induced norm concept, thiscriterion is equivalent with the followingcriterion [6].
.(34)∫∞
∞ <′γ−′=0
11
2 0)]()()()([ dt t wt wt z t z J
On the order hand, assuming T t t f += 0 and
, form the cost function in equation (25),
the following cost function can be defined
00 =t
[ ] T T F T Fx x J ′=,
, (35)∫ ′γ−′+ T dt t wt wt z t z 0
112 )]()()()([
where )( f t P F = .
Let define a Lyapunov function of theenergy as:
x P xV ′= , (36)
Then the following equation must hold,
0][00
=′−′+′+′∫T T
x P xdt x P x x P x x P x &&&
(37)
Substituting equation (23) into equation (37)the following equation is obtained,
∫ ′′+′++′+′T
x P Buu B P x x A P P A P x0
11 )()([ &
dt x P Bww B P x ww )]( 11 ′′+′+
0)(00
=′′+′+′− ∫ dt x P Br r B P x x P x r
t
r
T . (38)
Since adding equation (38) into the cost
function of equation (34) does not change thevalue, the cost function can be expanded asfollows,
[ ] +′−′= T
T T F T x P x Fx x J 0,
∫⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
′
γ−′
α
′′′T
w
w
dt
u
w
x
P B
P B
B P B P
uw x0
1
1
2
1
1
10
0][
∫ ′′+′+T
r r dt x P Br r B P x0
)( . (39)
where )( 22C C A P P A P ′++′+= &α .
By substituting P & of equation (28) into
equation (39) and recalling that 0)0( = x
yields
[ ] dt x P Bu x P Bu J T
F T ][][ 10
1, ′+′′+= ∫
∫ ′γ−′′γ−γ− −T
ww dt x P Bw x P Bw0
2
1
2
1
2][][
∫ ′′+′+ T
r r dt x P Br r B P x0
)( (40)
If 0)( =t r , the third term in the right side of
equation (40) become zero. In this case the
saddle point is given by
)()()(*)(1
t xt P Bt ut u ′−== (41)
)()()(*)( 2 t xt P Bt wt w w′== −γ (42)
where are optimum solution for
controlled input and disturbance, respectively.
Here, can be interpreted as the worst
disturbance.
**,wu
*w
Therefore, the cost function above can be
expressed by
77

8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 86/156
ProsidingSeminar Radar Nasional 2007
],0[,
2
2
2
],0[,
2
2],[ **T T F T wwuu J −γ−−= (43)
for any controlled input u and any disturbance
. For the optimum control input, equation
(43) means that
w
γ <],0[ T
zwT . (44)
If T is assumed to be infinity, then 0= P & , and
the norm criterion of equation (33) or
equation (34) is satisfied.∞ H
When , by substituting the
optimum in equation (26) and u in
equation (27) into the cost function in equation(40), the following is obtained
0)( ≠t r
)(1 t w
∫ ′−′= −T
wwopt F T dt t q B B B Bt q J 0
11
1
],[ )]())(([(
∫ ′+′+T
r r dt x P Br B P x0
][ (45)
According to the induced norm, the followingrelation are obtained
XT T opt F T T zw F x J T ′−= ],[],0[ (46)
∞∞∞∞ ′−= X opt F zw F x J T ],[][
(47)
Therefore when the reference signal is
present, the -norm criterion of the transfer
function from the disturbance to the evaluationsignal is affected by it.
)(t r
∞ H
3.2 Reference Signal Previewed for a
Certain Short Interval of Time ],[ 00 τ t t
In this case, it is assumed that the
reference signal is known only during a
certain interval of time
)(t r
τ which is much lesser
than the total working time T which isassumed to be long enough. During the
interval ],[ 00 τ +t t the following cost function
is considered
. (48)dt t wt wt z t z J t
t ])()()()([0
01121 ∫
τ+
′γ−′=
Since for the rest interval of time ],[ 00 τ +t t
the reference signal is unknown, it isconsidered as uncertain disturbance along
with . Assuming that)(1 t w T is infinity,
during this interval the following cost functionis considered
dt t wt wt z t z J t
])()()()([0
22 ∫
∞
τ+ ′γ−′= . (49)
Where
. (50)⎥⎦⎤⎢
⎣⎡=
)()(
1 t wt r w
Therefore, total cost function to be optimizedis
21 J J J tot += . (51)
From linear Optimal control Theory it is wellknown that the optimum value of the cost
function is2 J )(ˆ)( 002 τ τ ++′= t x P t x J . (52)
where P ˆ is the solution of the followingAlgebraic Riccati Equation
22ˆˆ C C P A A P ′+′+
0ˆ)]([ˆ 2
11 =+′−′− − P B B B B B B P wwr r γ (53)
From equations (49), (51), (52) the cost
function can be expressed as:tot J
+++′= )(ˆ)( 00 τ τ t x P t x J tot
∫ τ+
′γ−′0
0
)]()()()([ 112t
t dt t wt wt z t z (54)
Since the cost function of equations (54) and(35) are similar with the only difference intheir terminal conditions, the control law
which optimizes the cost function of
equations (54) subject to the constraint ofequation (20), is also given by equation (27)
with calculated from equation (28) and
tot J
)(ˆ t P
)(t q calculated from equation (29).
More over, since the cost function ofequation (54) and (35) are similar with theonly difference in their terminal conditions, the
analysis of -norm of the transfer function
from the disturbance to the evaluation
signal can be carried out in similar way as
in the previous subsection
∞ H
)(1 t w
)(t z
4. Conclusions and Discussions
The preview- control law has been
derived which has the feedback and feedforward parts. The control law is given bysolving a Riccati equation and by calculating adifferential equation of the signal used in thefeed forward part. Concerning the prediction offuture value of reference signal, two resultshave been obtained, i.e., reference signal
previewed for total working time , and
reference signal previewed for a certain short
interval of time
∞ H
],[ 0 f t t
],[ 00 τ +t t .
From the analysis of -norm criterionit has been found that the reference signal has
∞ H
78

8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 87/156
ProsidingSeminar Radar Nasional 2007
an effect on the value of the -norm of the
transfer function from the disturbance to theevaluation signal.
∞ H
5. References
[1] Byron Edde, ”RADAR: Principles,Technology, Applications”, Prentice HallInc., New Jersey, 1993.
[2] T. R. Benedict and G. W.Bordner, ”Synthesis of an Optimal Set ofRadar Tracking-While-Scan SmoothingEquations”, IRE Transactions, vol.AC-7, pp.27-32, July 1962.
[3] G. V. Trunk, ”Survey on Radar ADT”, Naval Research Laboratory Report 8698,June 1983.
[4] M. Hayase and K. Ichikawa, ”OptimalServo Systems Utilizing Future Value ofDesired Function”, Journal of the society
of instrumentation and control engineers, No.1, Vol.5, pp.86-94, Japan, 1969.
[5] A.P. Sage and C.C. White III, ”OptimumSystem Control”, Prentice-Hall, NewJersey, 1977.
[6] M. Green and D.J.N. Limbeer, ”LinearRobust Control”, Prentice-Hall, NewJersey, 1995
[7] B.A. Francis, ”A Course in Controltheory”, Lecture Notes in Control andInformation Sciences, Springer-Verlag,Heidelberg, 1987
∞ H
[8] Doyle J.C., Glover K., Khargonekar P.,and Francis B., ”State-Space Solutions to
Standard and Control Problems”,IEEE Trans. on Automatic Control, vol.34,
No.8,1989.
2 H ∞ H
79

8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 88/156
Prosiding
Seminar Radar Nasional 2007
Design of Radar Antenna Tracking Servo
Using State Feedback Robust Tracking Controller
Based on Preview- Control Approach ∞ H
Estiko RijantoPusat Penelitian Tenaga Listrik dan Mekatronik (Puslit Telimek),LEMBAGA ILMU PENGETAHUAN INDONESIA (LIPI),
Research Center for Electrical Power and Mechatronics,INDONESIAN INSTITUTE OF SCIENCES,
Jl. Cisitu No.21/154D, Bandung 40135, Indonesia; email: [email protected].
Abstract
This paper presents an application of preview- control method on designing a radar antenna tracking
servo. Assuming that the radar target future travel path can be estimated for certain number of sampling periodduring operation, the future information of the reference signal can be utilized to construct a tracking control system having better tracking performance towards the reference signal as well as robustness against
disturbance. In this paper, the preview- control uses state feedback. The tracking performance towards the
reference signal is analyzed both in frequency domain and in time domain. The frequency responses are
compared with those of the control systems designed using either only feedback control or conventional
optimum preview control. To evaluate the time response, reference signals of type of sinusoidal and sigmoid
function have been applied. From the numerical analysis results obtained in this study it has been verified that
the control system with preview- controller has better tracking performance than that which uses only
feedback controller, and also that it performs better disturbance attenuation characteristics than a control system designed using only optimum preview controller.
∞ H
∞ H
∞ H
∞ H ∞ H
Keywords: radar, antenna, tracking, servo, state feedback, preview, , controller.∞ H
Abstrak
Makalah ini mengetengahkan sebuah aplikasi metoda kendali preview- (H tak terhingga) dalam
perancangan tracking servo untuk antena radar. Dengan mengasumsikan bahwa jalur lintasan target radardapat diprediksi untuk beberapa waktu pencuplikan ke depan, maka informasi masa depan ini dapat digunakan
untuk merancang pengendali traking yang memiliki sifat lebih kokoh terhadap gangguan dan memiliki kinerja
tracking yang lebih baik. Pengendali preview- pada makalah ini menggunakan umpan balik keadaan.
Performansi tracking terhadap sinyal referensi telah dianalisa baik pada domain frekuensi maupun padadomain waktu. Responsi frekuensi telah dibandingkan dengan responsi frekuensi sistem kendali yang dirancang
hanya berdasarkan pengendali , dan juga telah dibandingkan dengan sistem kendali yang dirancang hanya
berdasarkan pengendali preview optimum konvensional. Untuk mengevaluasi responsi waktu, sinyal referensi
berbentuk sinusoidal dan sinyal referensi berbentuk fungsi sigmoid telah digunakan. Dari hasil analisa numerik yang diperoleh, di makalah ini telah dibuktikan bahwa sistem kendali yang memakai pengendali preview-
memiliki kinerja tracking lebih baik daripada sistem yang dirancang hanya berdasarkan kendali , dan juga
bahwa sistem tersebut lebih kokoh terhadap gangguan daripada sistem yang dirancang hanya menggunakan pengendali preview optimum.
∞ H
∞ H
∞ H
∞ H
∞ H
Kata kunci: radar, antena, tracking, servo, umpan balik keadaan, pengendali, preview, .∞ H
1. Introduction
A tracking radar should follows the positionof one or more objects in space, ignoring thecontent of the space not occupied by the target(s)
being tracked. In Single Target Track (STT) theradar follows a single object and ignores allothers. In Multi Target Track (MTT) the radar
continuously monitors the position of severaltargets, with each target sampled many times per
80
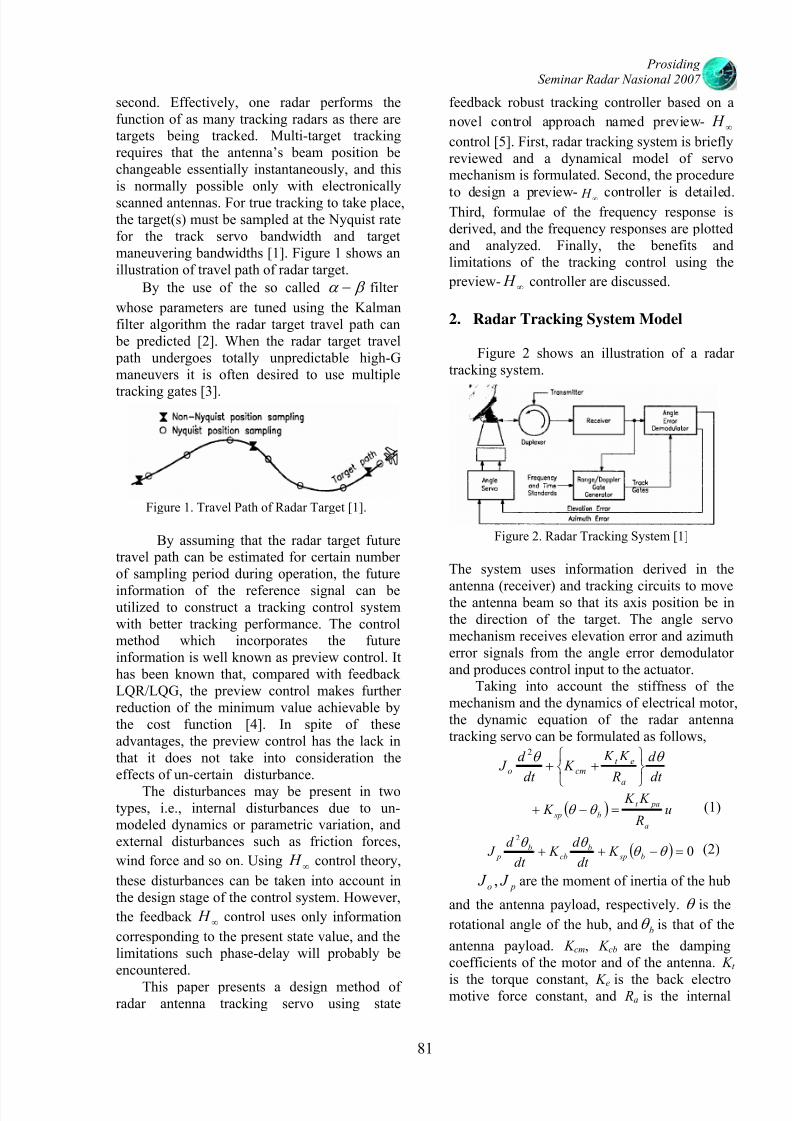
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 89/156
ProsidingSeminar Radar Nasional 2007
second. Effectively, one radar performs thefunction of as many tracking radars as there aretargets being tracked. Multi-target trackingrequires that the antenna’s beam position bechangeable essentially instantaneously, and thisis normally possible only with electronicallyscanned antennas. For true tracking to take place,the target(s) must be sampled at the Nyquist ratefor the track servo bandwidth and targetmaneuvering bandwidths [1]. Figure 1 shows anillustration of travel path of radar target.
By the use of the so called β α − filter
whose parameters are tuned using the Kalmanfilter algorithm the radar target travel path can be predicted [2]. When the radar target travel path undergoes totally unpredictable high-Gmaneuvers it is often desired to use multiple
tracking gates [3].
Figure 1. Travel Path of Radar Target [1].
By assuming that the radar target futuretravel path can be estimated for certain numberof sampling period during operation, the future
information of the reference signal can beutilized to construct a tracking control systemwith better tracking performance. The controlmethod which incorporates the futureinformation is well known as preview control. Ithas been known that, compared with feedbackLQR/LQG, the preview control makes furtherreduction of the minimum value achievable bythe cost function [4]. In spite of theseadvantages, the preview control has the lack inthat it does not take into consideration theeffects of un-certain disturbance.
The disturbances may be present in twotypes, i.e., internal disturbances due to un-modeled dynamics or parametric variation, andexternal disturbances such as friction forces,
wind force and so on. Using control theory,
these disturbances can be taken into account inthe design stage of the control system. However,
the feedback control uses only information
corresponding to the present state value, and thelimitations such phase-delay will probably beencountered.
∞ H
∞ H
This paper presents a design method ofradar antenna tracking servo using state
feedback robust tracking controller based on a
novel control approach named preview-
control [5]. First, radar tracking system is brieflyreviewed and a dynamical model of servomechanism is formulated. Second, the procedure
to design a preview- controller is detailed.Third, formulae of the frequency response isderived, and the frequency responses are plottedand analyzed. Finally, the benefits andlimitations of the tracking control using the
preview- controller are discussed.
∞ H
∞ H
∞ H
2. Radar Tracking System Model
Figure 2 shows an illustration of a radartracking system.
Figure 2. Radar Tracking System [1]
The system uses information derived in the
antenna (receiver) and tracking circuits to movethe antenna beam so that its axis position be inthe direction of the target. The angle servomechanism receives elevation error and azimutherror signals from the angle error demodulatorand produces control input to the actuator.
Taking into account the stiffness of themechanism and the dynamics of electrical motor,the dynamic equation of the radar antennatracking servo can be formulated as follows,
dt
d
R
K K K
dt
d J
a
et cmo
θ θ
⎭
⎬⎫
⎩
⎨⎧
++2
( ) u R
K K K
a
pat
b sp =−+ θ θ (1)
( ) 02
=−++ θ θ θ θ
b spb
cbb
p K dt
d K
dt
d J (2)
po J J , are the moment of inertia of the hub
and the antenna payload, respectively. θ is the
rotational angle of the hub, and bθ is that of the
antenna payload. K cm, K cb are the dampingcoefficients of the motor and of the antenna. K t
is the torque constant, K e is the back electromotive force constant, and Ra is the internal
81
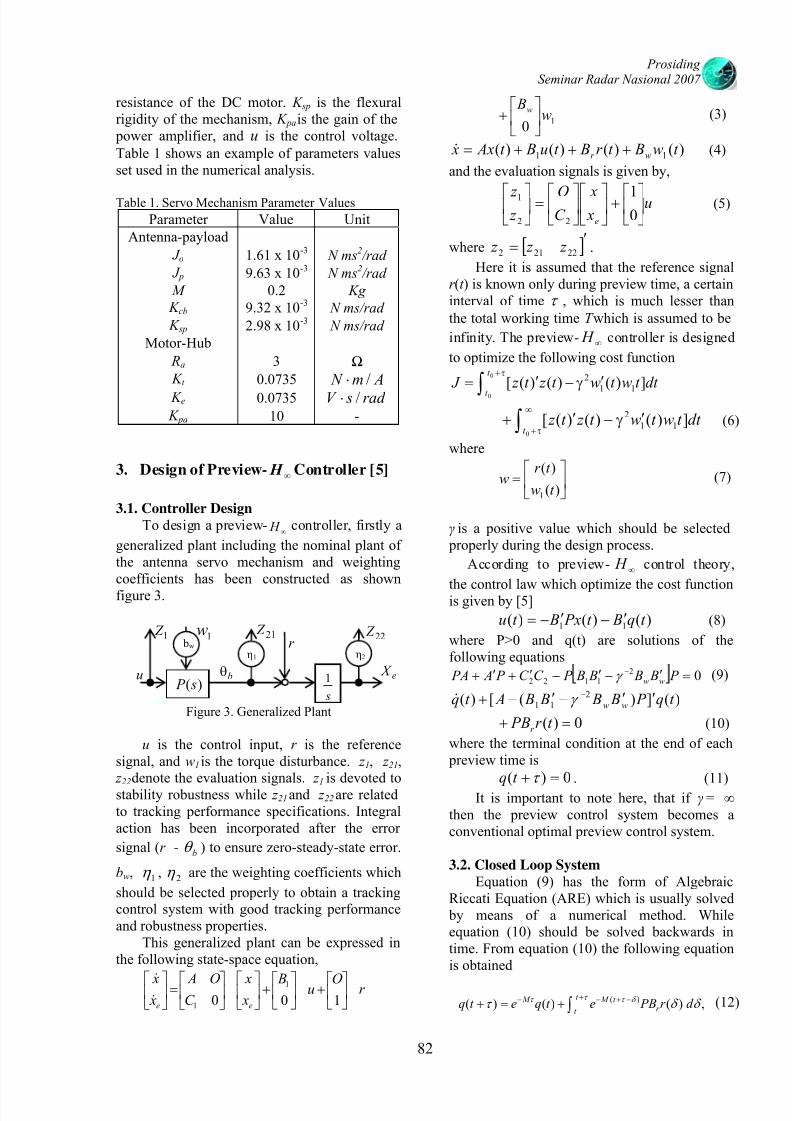
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 90/156
ProsidingSeminar Radar Nasional 2007
resistance of the DC motor. K sp is the flexuralrigidity of the mechanism, K pa is the gain of the power amplifier, and u is the control voltage.
Table 1 shows an example of parameters valuesset used in the numerical analysis.
Table 1. Servo Mechanism Parameter Values
Parameter Value Unit
Antenna-payload
J o 1.61 x 10-3 N ms
2 /rad
J p 9.63 x 10-3 N ms2 /rad
M 0.2 Kg
K cb 9.32 x 10-3 N ms/rad
K sp 2.98 x 10-3 N ms/rad
Motor-Hub
Ra 3 Ω
K t 0.0735 Am N /⋅
K e 0.0735 rad sV /⋅ K pa 10 -
3. Design of Preview- Controller [5]∞ H
3.1. Controller Design
To design a preview- controller, firstly a
generalized plant including the nominal plant ofthe antenna servo mechanism and weightingcoefficients has been constructed as shownfigure 3.
∞ H
Figure 3. Generalized Plant
u is the control input, r is the referencesignal, and w1 is the torque disturbance. z 1, z 21,
z 22
denote the evaluation signals. z 1is devoted to
stability robustness while z 21 and z 22 are relatedto tracking performance specifications. Integralaction has been incorporated after the error
signal (r - bθ ) to ensure zero-steady-state error.
bw , 1η , are the weighting coefficients which
should be selected properly to obtain a trackingcontrol system with good tracking performanceand robustness properties.
2η
This generalized plant can be expressed inthe following state-space equation,
r Ou B x x
C O A
x x
ee
⎥⎦⎤⎢
⎣⎡+⎥
⎦⎤⎢
⎣⎡+⎥
⎦⎤⎢
⎣⎡⎥
⎦⎤⎢
⎣⎡=⎥
⎦⎤⎢
⎣⎡
1001
1&&
10
w Bw
⎥⎦
⎤⎢⎣
⎡+ (3)
)()()()( 11 t w Bt r Bt u Bt Ax x wr +++=& (4)
and the evaluation signals is given by,
(5)u x x
C O
z z
e
⎥⎦⎤⎢
⎣⎡+⎥
⎦⎤⎢
⎣⎡⎥
⎦⎤⎢
⎣⎡=⎥
⎦⎤⎢
⎣⎡
01
22
1
where .[ ]′= 22212 z z z
Here it is assumed that the reference signalr (t ) is known only during preview time, a certaininterval of time τ , which is much lesser than
the total working time T which is assumed to be
infinity. The preview- controller is designed
to optimize the following cost function∞ H
∫
τ+′γ−′=
0
0
])()()([11
2t
t
dt t wt wt z t z J
(6)∫∞
τ+′γ−′+
0
])()()([ 11
2
t dt t wt wt z t z
where
⎥⎦
⎤⎢⎣
⎡=
)(
)(
1 t w
t r w (7)
γ is a positive value which should be selected properly during the design process.
According to preview- control theory,
the control law which optimize the cost functionis given by [5]
∞ H
)()()( 11 t q Bt Px Bt u ′−′−= (8)1w
where P>0 and q(t) are solutions of thefollowing equations
02
1122 =′−′−′+′+ − P B B B B P C C P A PAww
γ (9)
)(])([)( 2
11 t q P B B B B At q ww ′′−′−+ −γ &
0)( =+ t r PBr (10)
where the terminal condition at the end of each preview time is
0)( =+ τ t q. (11)
It is important to note here, that if γ = ∞ then the preview control system becomes aconventional optimal preview control system.
3.2. Closed Loop System
Equation (9) has the form of AlgebraicRiccati Equation (ARE) which is usually solved by means of a numerical method. Whileequation (10) should be solved backwards intime. From equation (10) the following equationis obtained
(12),)()()( )( δ δ τ τ δ τ τ d r PBet qet q r
t
t
t M M ∫ + −+−− +=+
)( s P s
1
bw η2
1 Z 21
bθ
η1
Z r
u
e X
22 Z
82
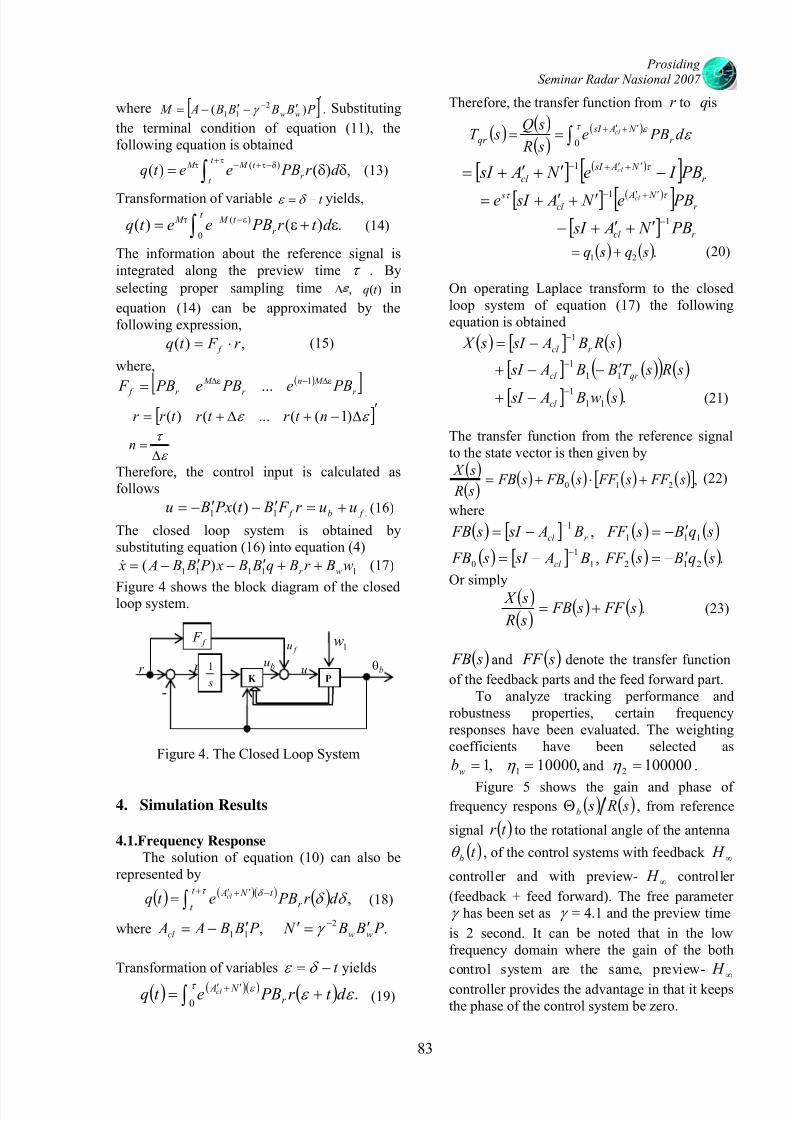
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 91/156
ProsidingSeminar Radar Nasional 2007
where Substituting
the terminal condition of equation (11), thefollowing equation is obtained
[ ] .)( 211
′′−′−= − P B B B B A M wwγ
(13),)()( )( δδ= ∫ τ+ δ−τ+−τ d r PBeet q r
t
t
t M M
Transformation of variable t −= δ ε yields,
(14).)()(0
)( ε+ε= ∫ ε−−τd t r PBeet q r
t t M M
The information about the reference signal isintegrated along the preview time τ . By
selecting proper sampling time )(, t q∆ in
equation (14) can be approximated by thefollowing expression,
,)( r F t q f ⋅= (15)
where,( )
r
M n
r
M
r f PBe PBe PB F
ε∆−ε∆
=
1
...
[ ]′∆−+∆+= ε ε )1((...()( nt r t r t r r
ε
τ
∆=n
Therefore, the control input is calculated asfollows
.11 )( f b f uur F Bt Px Bu +=′−′−= (16)
The closed loop system is obtained bysubstituting equation (16) into equation (4)
11111 )( w Br Bq B B x P B B A x wr ++′−′−=& (17)
Figure 4 shows the block diagram of the closedloop system.
Figure 4. The Closed Loop System
4. Simulation Results
4.1.Frequency Response
The solution of equation (10) can also berepresented by
( ) ( )( ) ( )∫ + −′+′= τ δ
δ δ t
t r
t N Ad r PBet q cl , (18)
where ., 2
11 P B B N P B B A A wwcl ′=′′−= −γ
Transformation of variables t −= δ ε yields
(19)( ) ( )( ) ( ) .0
ε ε τ ε
d t r PBet q r N Acl += ∫ ′+′
Therefore, the transfer function from r to isq
( ) ( )
( )( )∫
′+′+== τ ε
ε 0
d PBe s R
sQ sT r
N A sI qr
cl
[ ] ( )[ ] r
N A sI
cl PB I e N A sI cl −′+′+= ′+′+− τ 1
[ ] ( )[ ] r N A
cl s PBe N A sI e cl τ τ ′+′−′+′+= 1
[ ] r cl PB N A sI 1−′+′+−
(20)( ) ( ).21 sq sq += On operating Laplace transform to the closedloop system of equation (17) the followingequation is obtained
( ) [ ] ( ) s R B A sI s X r cl
1−−=
[ ] ( )( ) ( ) s R sT B B A sI qr cl 11
1 ′−−+ −
[ ] ( ).111 sw B A sI cl
−−+ (21)
The transfer function from the reference signalto the state vector is then given by
( )( )
( ) ( ) ( ) ( )[ ],210 s FF s FF s FB s FB s R
s X +⋅+= (22)
where
( ) [ ] ,1
r cl B A sI s FB −−= ( ) ( ) sq B s FF 111
′−=
( ) [ ] ,1
1
0 B A sI s FB cl
−−= ( ) ( ).212 sq B s FF ′−=
Or simply
( )( )
( ) ( ). s FF s FB s R
s X += (23)
f u
bu
f F
f F s
1
K P
1w
bθ
u
r
-
( ) s FB and ( ) s FF denote the transfer function
of the feedback parts and the feed forward part.To analyze tracking performance and
robustness properties, certain frequencyresponses have been evaluated. The weightingcoefficients have been selected as
,10000,1 1 == η wb and 1000002 =η .
Figure 5 shows the gain and phase offrequency respons ( ) ( ) s R sbΘ , from reference
signal ( )t r to the rotational angle of the antenna
( )t bθ , of the control systems with feedback
controller and with preview- controller
(feedback + feed forward). The free parameter
∞ H
∞ H
γ has been set as γ = 4.1 and the preview time
is 2 second. It can be noted that in the lowfrequency domain where the gain of the both
control system are the same, preview-
controller provides the advantage in that it keepsthe phase of the control system be zero.
∞ H
83
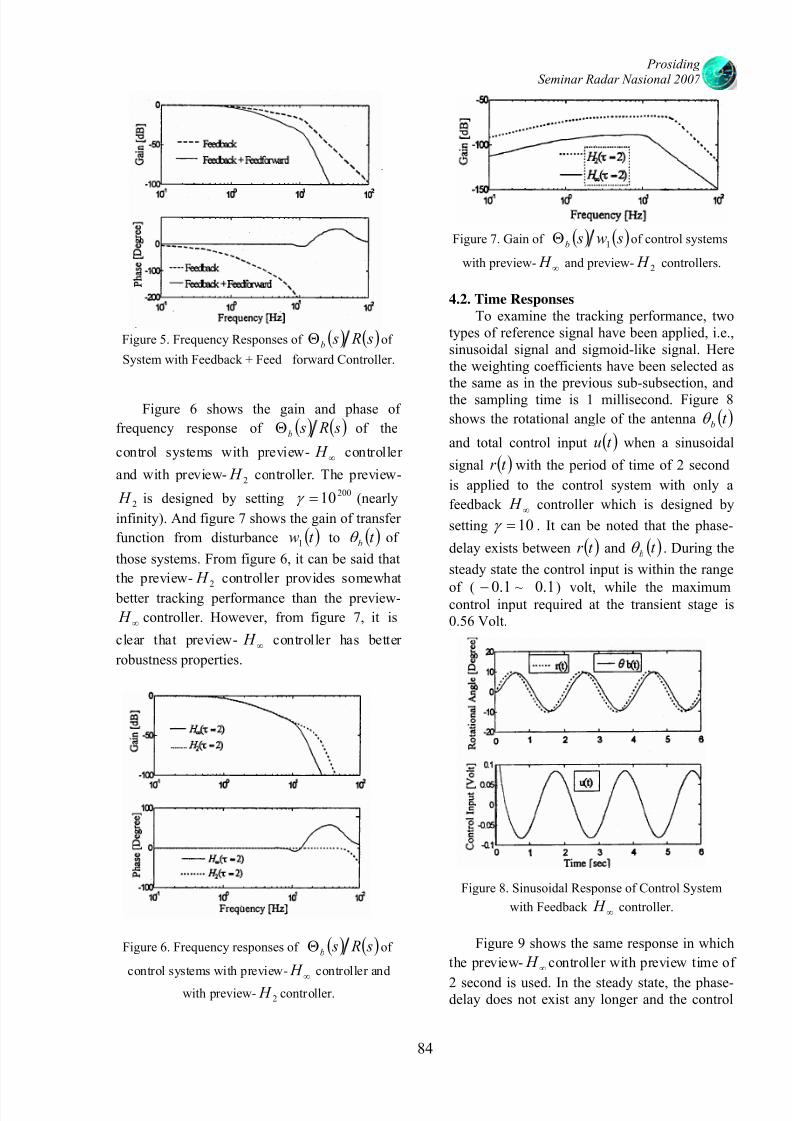
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 92/156
ProsidingSeminar Radar Nasional 2007
Figure 5. Frequency Responses of ( ) ( ) s R sbΘ of
System with Feedback + Feed forward Controller.
Figure 6 shows the gain and phase of
frequency response of ( ) ( ) s R sbΘ of the
control systems with preview- controller
and with preview- controller. The preview-
is designed by setting (nearly
infinity). And figure 7 shows the gain of transfer
function from disturbance to
∞ H
2 H
2 H 20010=γ
( )t w1 ( )t bθ of
those systems. From figure 6, it can be said that
the preview- controller provides somewhat
better tracking performance than the preview-
controller. However, from figure 7, it is
clear that preview- controller has better
robustness properties.
2 H
∞ H
∞ H
Figure 6. Frequency responses of ( ) ( ) s R sbΘ of
control systems with preview- controller and
with preview- controller.
∞ H
2 H
Figure 7. Gain of ( ) ( ) sw sb 1Θ of control systems
with preview- and preview- controllers.∞ H 2 H
4.2. Time Responses
To examine the tracking performance, twotypes of reference signal have been applied, i.e.,sinusoidal signal and sigmoid-like signal. Herethe weighting coefficients have been selected asthe same as in the previous sub-subsection, andthe sampling time is 1 millisecond. Figure 8
shows the rotational angle of the antenna ( )t bθ
and total control input when a sinusoidal
signal
( )t u
( )t r with the period of time of 2 second
is applied to the control system with only a
feedback controller which is designed by
setting
∞ H
10=γ . It can be noted that the phase-
delay exists between and( )t r ( )t bθ . During the
steady state the control input is within the range
of ( 1.0− ~ ) volt, while the maximumcontrol input required at the transient stage is0.56 Volt.
1.0
Figure 8. Sinusoidal Response of Control System
with Feedback controller.∞ H
Figure 9 shows the same response in which
the preview- controller with preview time of
2 second is used. In the steady state, the phase-delay does not exist any longer and the control
∞ H
84
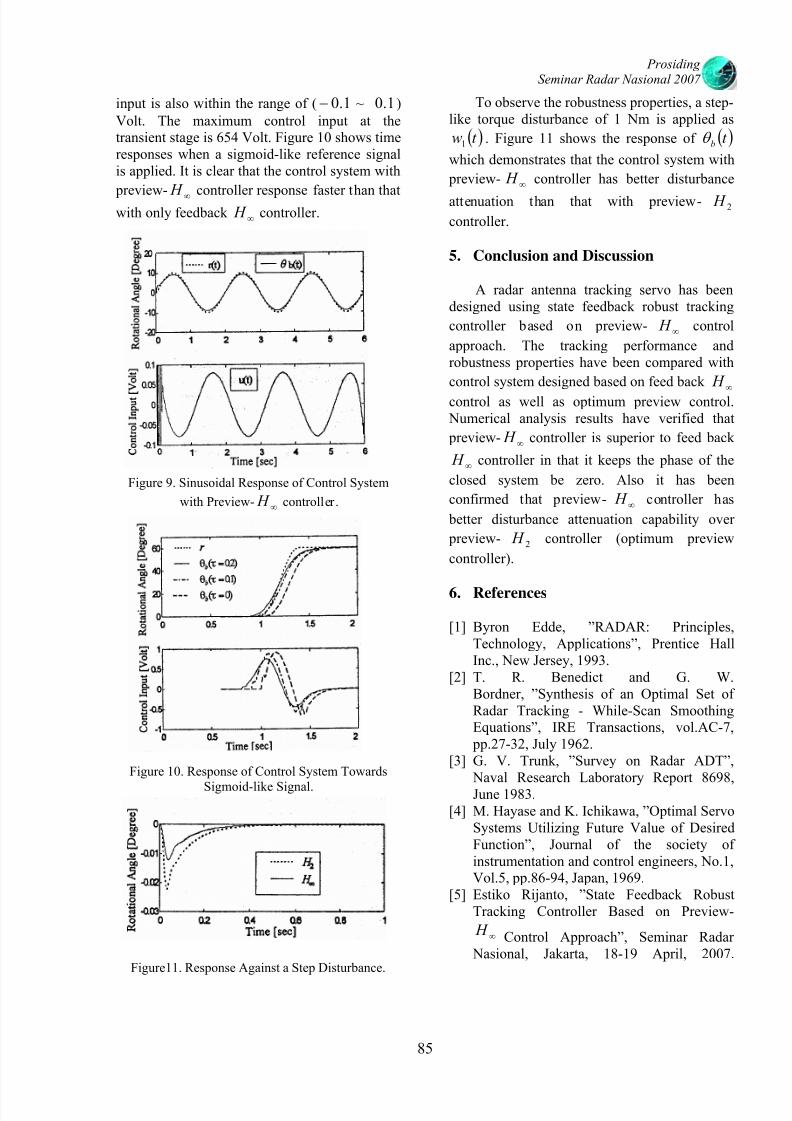
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 93/156
ProsidingSeminar Radar Nasional 2007
input is also within the range of ( ~ )
Volt. The maximum control input at thetransient stage is 654 Volt. Figure 10 shows timeresponses when a sigmoid-like reference signalis applied. It is clear that the control system with
preview- controller response faster than thatwith only feedback controller.
1.0− 1.0
∞ H ∞ H
Figure 9. Sinusoidal Response of Control System
with Preview- controller.∞ H
Figure 10. Response of Control System Towards
Sigmoid-like Signal.
Figure11. Response Against a Step Disturbance.
To observe the robustness properties, a step-like torque disturbance of 1 Nm is applied as
( )t w1 . Figure 11 shows the response of ( )t bθ
which demonstrates that the control system with
preview- controller has better disturbance
attenuation than that with preview-
controller.
∞ H
2 H
5. Conclusion and Discussion
A radar antenna tracking servo has beendesigned using state feedback robust tracking
controller based on preview- control
approach. The tracking performance androbustness properties have been compared with
control system designed based on feed back
control as well as optimum preview control. Numerical analysis results have verified that
preview- controller is superior to feed back
controller in that it keeps the phase of the
closed system be zero. Also it has been
confirmed that preview- controller has
better disturbance attenuation capability over
preview- controller (optimum preview
controller).
∞ H
∞ H
∞ H
∞ H
∞ H
2 H
6. References
[1] Byron Edde, ”RADAR: Principles,Technology, Applications”, Prentice HallInc., New Jersey, 1993.
[2] T. R. Benedict and G. W.Bordner, ”Synthesis of an Optimal Set ofRadar Tracking - While-Scan SmoothingEquations”, IRE Transactions, vol.AC-7, pp.27-32, July 1962.
[3] G. V. Trunk, ”Survey on Radar ADT”, Naval Research Laboratory Report 8698,June 1983.
[4] M. Hayase and K. Ichikawa, ”Optimal ServoSystems Utilizing Future Value of DesiredFunction”, Journal of the society ofinstrumentation and control engineers, No.1,Vol.5, pp.86-94, Japan, 1969.
[5] Estiko Rijanto, ”State Feedback RobustTracking Controller Based on Preview-
Control Approach”, Seminar Radar Nasional, Jakarta, 18-19 April, 2007.
∞ H
85

8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 94/156
ProsidingSeminar Radar Nasional 2007
PERANCANGAN DAN REALISASI ANTENA WIRE DIPOLE PENGUKUR
DIELEKTRIK TANAH MENGGUNAKAN METODE FDTD 3D
Yuyu Wahyu 1), Andik Setiawan2) ,Folin Oktafiani 1), A.A Lestari3) 1)
Pusat Penelitian Elektronika dan Telekomunikasi2) Jurusan Teknik Elektro Sekolah Tinggi Teknologi Telkom,Bandung3) International Research Centre for Telecom and Radar – Indonesian Branch (IRCTR-IB), Indonesia
Abstract In ground penetrating radar (GPR) the antennas are a crucial part that critically determines the performance of the
whole GPR system. One of them is GPR utility. One of them is GPR utility for measuring the level of grounddielectric (conductivity and permittivity). Commonly, for solving problem we use different antenna for different
ground type. That adaptation approach can be done by arranging antenna length. In that consideration, in thisresearch we try develop a ground dielectric measurer of GPR utility antenna with optimum antenna length and the ground target dielectric, so can be found the optimum resolution and penetration according to expected result.Then,hoped the difference length of antenna configuration, conductive for adaptation footprint antenna. The proposed
GPR antenna are wire dipole antenna with 15 cm length, 30 cm length and 60 cm length, where each antennaoptimized each other according to different type of ground dielectric. So, there is a relation between length antenna
with the level of ground dielectric. For electromagnetic analysis in time domain we use FDTD 3D software for perceiving input impedance of antenna.
Key words :GPR, Wire dipole antenna, FDTD, input impedance
Abstrak
Dalam kebanyakan sistem ground penetrating radar (GPR), antena memainkan peran yang sangat penting (krusial).
Salah satunya adalah utility GPR untuk mengukur tingkat dielektrik suatu jenis tanah (konduktivitas dan permitivitas) . Secara umum untuk mengatasi masalah di atas adalah dengan menggunakan antena dengan panjang
yang berbeda – beda untuk setiap pengukuran suatu jenis tanah tertentu. Dalam penelitian ini, mencoba untuk
mengembangkan antena utility GPR pengukur dielektrik tanah yang optimum antara harga pembuatan, keakuratan,dan kemudahan pencarian bahan antena terhadap target yang diukur tingkat dielektriknya. Antena utility GPR pengukur dielektrik tanah pada penelitian ini berbentuk wire dipole dengan panjang 15 cm, 30 cm, dan 60 cm sertaterbuat dari bahan tembaga. Untuk keperluan analisis menggunakan software FDTD 3D (Finite Difference Time
Domain).
Kata Kunci :GPR, antena wire dipole, FDTD, impedansi input
1. PENDAHULUAN
1.1 Gambaran Umum GPR
Istilah Ground Penetrating Radar (GPR), ground probing radar , subsurface radar
atau surface penetrating radar mengacu padasebuah metode geofisika yang menggunakanteknik elektromagnetik yang dirancang untukmenghasilkan cross-sectional profile
berkelanjutan atau merekam corak ataukarakteristik di bawah atau dipermukaan tanahtanpa mengebor ataupun menggali tanah. Akantetapi, untuk mengetahui kedalaman yang akanditembus oleh GPR itu, diperlukan informasi
mengenai kondisi dielektrik dari target tersebut.Kondisi dielektrik target khususnya tanah,memiliki tingkat dielektrik yang berbeda – beda.
Hal tersebut tergantung dari jenis tanah, tingkatkelembaban, kadar air, dan meterial – materiallain yang dikandungnya.
1.2 Antena
Menurut definisi yang terdapat pada
The IEEE Standard Definitions of Terms for
Antenas (IEEE Std 145-1973), antena adalahsuatu alat yang digunakan untuk meradiasikanatau menerima gelombang radio. Dari siniterlihat bahwa suatu struktur dikatakan antenaadalah ketika struktur tersebut dapat berfungsisebagai penerima maupun, meradiasikangelombang radio. Jenis antena yang dipakai pada penelitian ini adalah berbentuk wire dipole
dengan diameter wire 2 mm, terbuat daritembaga dengan panjang 15 cm, 30 cm, dan 60
86
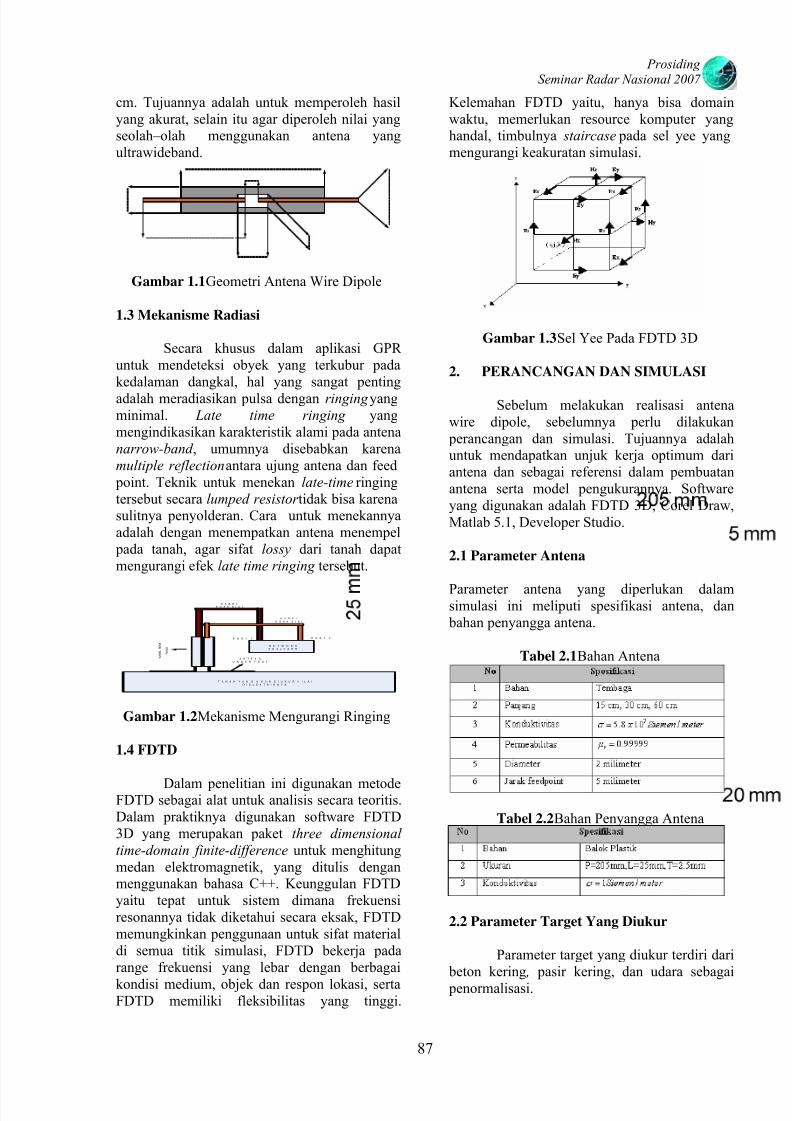
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 95/156
ProsidingSeminar Radar Nasional 2007
cm. Tujuannya adalah untuk memperoleh hasilyang akurat, selain itu agar diperoleh nilai yangseolah–olah menggunakan antena yangultrawideband.
Gambar 1.1 Geometri Antena Wire Dipole
1.3 Mekanisme Radiasi
Secara khusus dalam aplikasi GPRuntuk mendeteksi obyek yang terkubur padakedalaman dangkal, hal yang sangat pentingadalah meradiasikan pulsa dengan ringing yangminimal. Late time ringing yangmengindikasikan karakteristik alami pada antenanarrow-band , umumnya disebabkan karenamultiple reflection antara ujung antena dan feed point. Teknik untuk menekan late-time ringingtersebut secara lumped resistor tidak bisa karenasulitnya penyolderan. Cara untuk menekannyaadalah dengan menempatkan antena menempel pada tanah, agar sifat lossy dari tanah dapatmengurangi efek late time ringing tersebut.
Gambar 1.2 Mekanisme Mengurangi Ringing
1.4 FDTD
Dalam penelitian ini digunakan metodeFDTD sebagai alat untuk analisis secara teoritis.Dalam praktiknya digunakan software FDTD3D yang merupakan paket three dimensional
time-domain finite-difference untuk menghitungmedan elektromagnetik, yang ditulis denganmenggunakan bahasa C++. Keunggulan FDTDyaitu tepat untuk sistem dimana frekuensiresonannya tidak diketahui secara eksak, FDTDmemungkinkan penggunaan untuk sifat materialdi semua titik simulasi, FDTD bekerja padarange frekuensi yang lebar dengan berbagai
kondisi medium, objek dan respon lokasi, sertaFDTD memiliki fleksibilitas yang tinggi.
Kelemahan FDTD yaitu, hanya bisa domainwaktu, memerlukan resource komputer yanghandal, timbulnya staircase pada sel yee yangmengurangi keakuratan simulasi.
Gambar 1.3 Sel Yee Pada FDTD 3D
2. PERANCANGAN DAN SIMULASI
Sebelum melakukan realisasi antenawire dipole, sebelumnya perlu dilakukan perancangan dan simulasi. Tujuannya adalahuntuk mendapatkan unjuk kerja optimum dariantena dan sebagai referensi dalam pembuatanantena serta model pengukurannya. Softwareyang digunakan adalah FDTD 3D, Corel Draw,Matlab 5.1, Developer Studio.
2.1 Parameter Antena
Parameter antena yang diperlukan dalamsimulasi ini meliputi spesifikasi antena, dan bahan penyangga antena.
Tabel 2.1 Bahan Antena
Tabel 2.2 Bahan Penyangga Antena
2.2 Parameter Target Yang Diukur
Parameter target yang diukur terdiri dari beton kering , pasir kering, dan udara sebagai penormalisasi.
N E T W O R K A N A L Y S E R
K A B E L S E M I
R I G I D
K A B E LK O A K S I A L
A N T E N AU N D E R T E S T
P O R T 1 P O R T 2
K A B E LK O A K S I A L
T A N A H Y A N G A K A N D I U K U R N I L A ID I E L E K T R I K N Y A
87
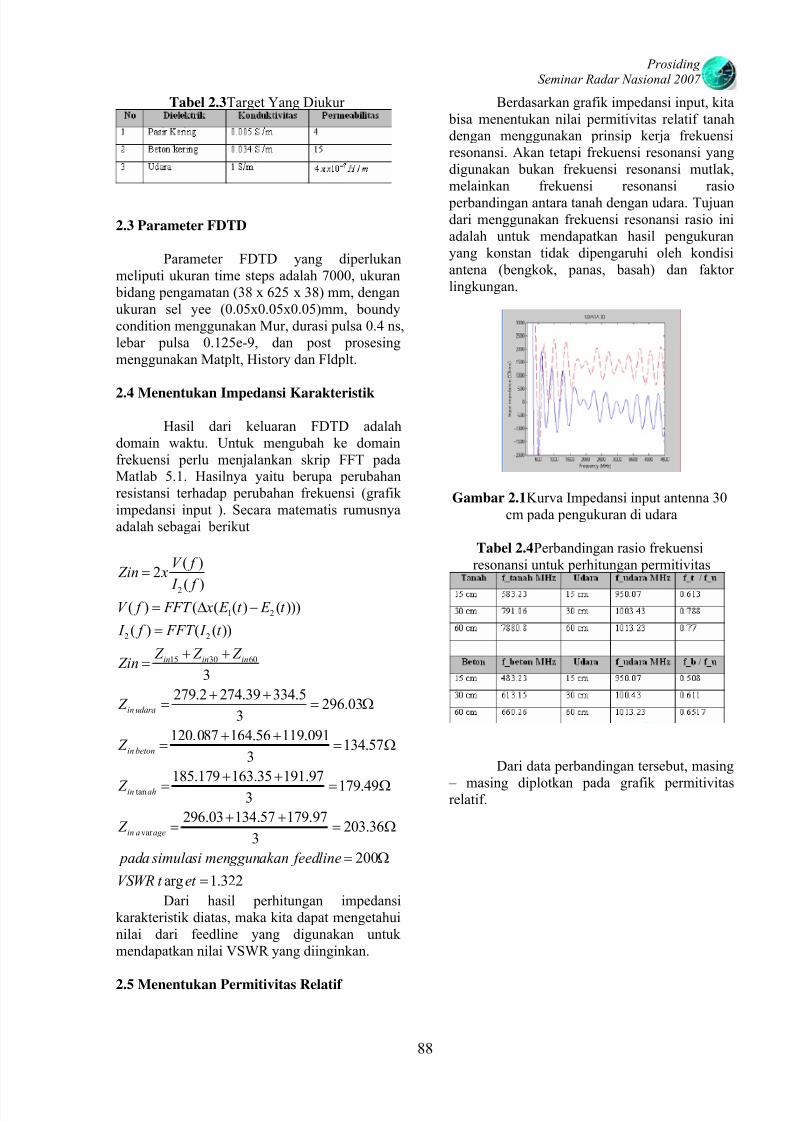
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 96/156
ProsidingSeminar Radar Nasional 2007
Tabel 2.3 Target Yang Diukur
2.3 Parameter FDTD
Parameter FDTD yang diperlukanmeliputi ukuran time steps adalah 7000, ukuran bidang pengamatan (38 x 625 x 38) mm, denganukuran sel yee (0.05x0.05x0.05)mm, boundycondition menggunakan Mur, durasi pulsa 0.4 ns,lebar pulsa 0.125e-9, dan post prosesingmenggunakan Matplt, History dan Fldplt.
2.4 Menentukan Impedansi Karakteristik
Hasil dari keluaran FDTD adalahdomain waktu. Untuk mengubah ke domainfrekuensi perlu menjalankan skrip FFT padaMatlab 5.1. Hasilnya yaitu berupa perubahanresistansi terhadap perubahan frekuensi (grafikimpedansi input ). Secara matematis rumusnyaadalah sebagai berikut
2
1 2
2 2
15 30 60
tan
var
( )2
( )( ) ( ( ( ) ( )))
( ) ( ( ))
3
279.2 274.39 334.5296.03
3
120.087 164.56 119.091134.57
3
185.179 163.35 191.97179.493
in in in
in
in
in
in
Zin
Zin
Z
Z
Z
Z
udara
beton
ah
a
V f x
I f V f FFT x E t E t
I f FFT I t
Z Z Z
=
= ∆ −
=
+ +=
+ += = Ω
+ += = Ω
+ += = Ω
296.03 134.57 179.97203.36
3
200
arg 1.322
age
pada simulasi menggunakan feedline
WR t et
+ += = Ω
= Ω
=VS
Dari hasil perhitungan impedansikarakteristik diatas, maka kita dapat mengetahuinilai dari feedline yang digunakan untukmendapatkan nilai VSWR yang diinginkan.
2.5 Menentukan Permitivitas Relatif
Berdasarkan grafik impedansi input, kita bisa menentukan nilai permitivitas relatif tanahdengan menggunakan prinsip kerja frekuensiresonansi. Akan tetapi frekuensi resonansi yangdigunakan bukan frekuensi resonansi mutlak,melainkan frekuensi resonansi rasio perbandingan antara tanah dengan udara. Tujuandari menggunakan frekuensi resonansi rasio iniadalah untuk mendapatkan hasil pengukuranyang konstan tidak dipengaruhi oleh kondisiantena (bengkok, panas, basah) dan faktorlingkungan.
Gambar 2.1 Kurva Impedansi input antenna 30cm pada pengukuran di udara
Tabel 2.4 Perbandingan rasio frekuensiresonansi untuk perhitungan permitivitas
Dari data perbandingan tersebut, masing
– masing diplotkan pada grafik permitivitasrelatif.
88
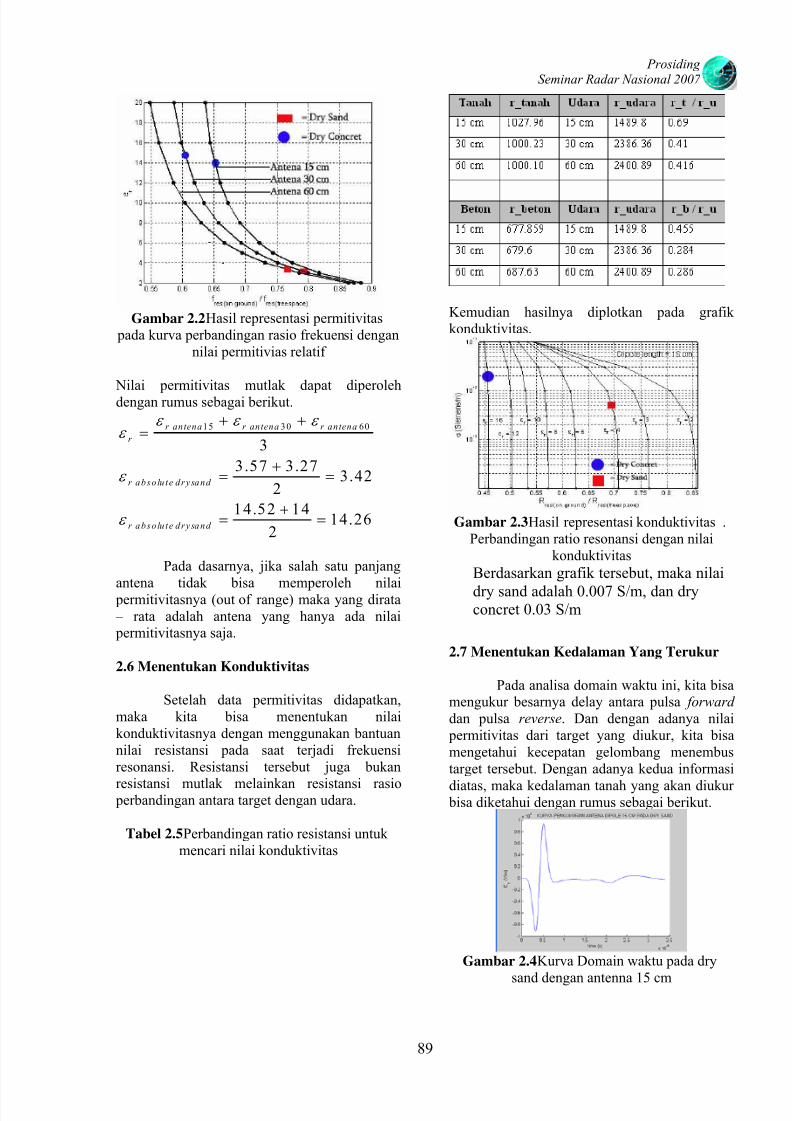
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 97/156
ProsidingSeminar Radar Nasional 2007
Gambar 2.2 Hasil representasi permitivitas pada kurva perbandingan rasio frekuensi dengan
nilai permitivias relatif
Nilai permitivitas mutlak dapat diperolehdengan rumus sebagai berikut.
15 30 60
3
3.57 3.273.42
2
14.52 1414.26
2
r antena r antena r antena
r
r abso lu te drysand
r abso lu te drysand
ε ε ε ε
ε
ε
+ +=
+= =
+= =
Pada dasarnya, jika salah satu panjang
antena tidak bisa memperoleh nilai permitivitasnya (out of range) maka yang dirata – rata adalah antena yang hanya ada nilai permitivitasnya saja.
2.6 Menentukan Konduktivitas
Setelah data permitivitas didapatkan,maka kita bisa menentukan nilaikonduktivitasnya dengan menggunakan bantuannilai resistansi pada saat terjadi frekuensiresonansi. Resistansi tersebut juga bukan
resistansi mutlak melainkan resistansi rasio perbandingan antara target dengan udara.
Tabel 2.5 Perbandingan ratio resistansi untukmencari nilai konduktivitas
Kemudian hasilnya diplotkan pada grafikkonduktivitas.
Gambar 2.3 Hasil representasi konduktivitas .Perbandingan ratio resonansi dengan nilai
konduktivitas
Berdasarkan grafik tersebut, maka nilai
dry sand adalah 0.007 S/m, dan dryconcret 0.03 S/m
2.7 Menentukan Kedalaman Yang Terukur
Pada analisa domain waktu ini, kita bisamengukur besarnya delay antara pulsa forward dan pulsa reverse. Dan dengan adanya nilai permitivitas dari target yang diukur, kita bisamengetahui kecepatan gelombang menembustarget tersebut. Dengan adanya kedua informasi
diatas, maka kedalaman tanah yang akan diukur bisa diketahui dengan rumus sebagai berikut.
Gambar 2.4 Kurva Domain waktu pada dry
sand dengan antenna 15 cm
89
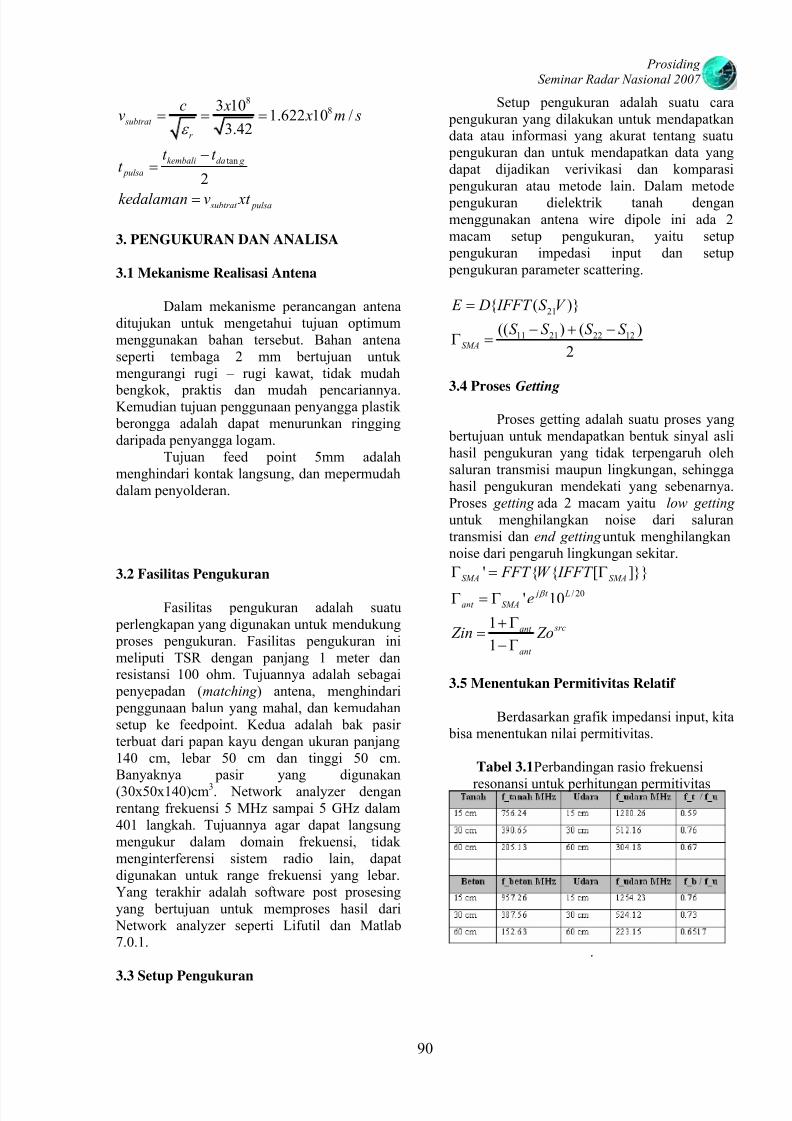
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 98/156
ProsidingSeminar Radar Nasional 2007
88
tan
3 101.622 10 /
3.42
2
subtrat
r
kembali da g
pulsa
subtrat pulsa
c xv
t t t
kedalaman v xt
ε = = =
−=
=
x m s
3. PENGUKURAN DAN ANALISA
3.1 Mekanisme Realisasi Antena
Dalam mekanisme perancangan antenaditujukan untuk mengetahui tujuan optimummenggunakan bahan tersebut. Bahan antenaseperti tembaga 2 mm bertujuan untukmengurangi rugi – rugi kawat, tidak mudah
bengkok, praktis dan mudah pencariannya.Kemudian tujuan penggunaan penyangga plastik berongga adalah dapat menurunkan ringgingdaripada penyangga logam.
Tujuan feed point 5mm adalahmenghindari kontak langsung, dan mepermudahdalam penyolderan.
3.2 Fasilitas Pengukuran
Fasilitas pengukuran adalah suatu perlengkapan yang digunakan untuk mendukung proses pengukuran. Fasilitas pengukuran inimeliputi TSR dengan panjang 1 meter danresistansi 100 ohm. Tujuannya adalah sebagai penyepadan (matching ) antena, menghindari penggunaan balun yang mahal, dan kemudahansetup ke feedpoint. Kedua adalah bak pasirterbuat dari papan kayu dengan ukuran panjang140 cm, lebar 50 cm dan tinggi 50 cm.Banyaknya pasir yang digunakan(30x50x140)cm3. Network analyzer denganrentang frekuensi 5 MHz sampai 5 GHz dalam401 langkah. Tujuannya agar dapat langsungmengukur dalam domain frekuensi, tidakmenginterferensi sistem radio lain, dapatdigunakan untuk range frekuensi yang lebar.Yang terakhir adalah software post prosesingyang bertujuan untuk memproses hasil dari Network analyzer seperti Lifutil dan Matlab7.0.1.
3.3 Setup Pengukuran
Setup pengukuran adalah suatu cara pengukuran yang dilakukan untuk mendapatkandata atau informasi yang akurat tentang suatu pengukuran dan untuk mendapatkan data yangdapat dijadikan verivikasi dan komparasi pengukuran atau metode lain. Dalam metode pengukuran dielektrik tanah denganmenggunakan antena wire dipole ini ada 2macam setup pengukuran, yaitu setup pengukuran impedasi input dan setup pengukuran parameter scattering.
21
11 21 22 12
( )
(( ) ( )
2SMA
E D IFFT S V
S S S S
=
− + −Γ =
3.4 Proses Getting
Proses getting adalah suatu proses yang bertujuan untuk mendapatkan bentuk sinyal aslihasil pengukuran yang tidak terpengaruh olehsaluran transmisi maupun lingkungan, sehinggahasil pengukuran mendekati yang sebenarnya.Proses getting ada 2 macam yaitu low getting untuk menghilangkan noise dari salurantransmisi dan end getting untuk menghilangkannoise dari pengaruh lingkungan sekitar.
/ 20
' [ ]
' 10
1
1
SMA SMA
j t L
ant SMA
srcant
ant
FFT W IFFT
e
Zin Zo
β
Γ = Γ
Γ = Γ
+ Γ=
− Γ
3.5 Menentukan Permitivitas Relatif
Berdasarkan grafik impedansi input, kita bisa menentukan nilai permitivitas.
Tabel 3.1 Perbandingan rasio frekuensi
resonansi untuk perhitungan permitivitas
.
90
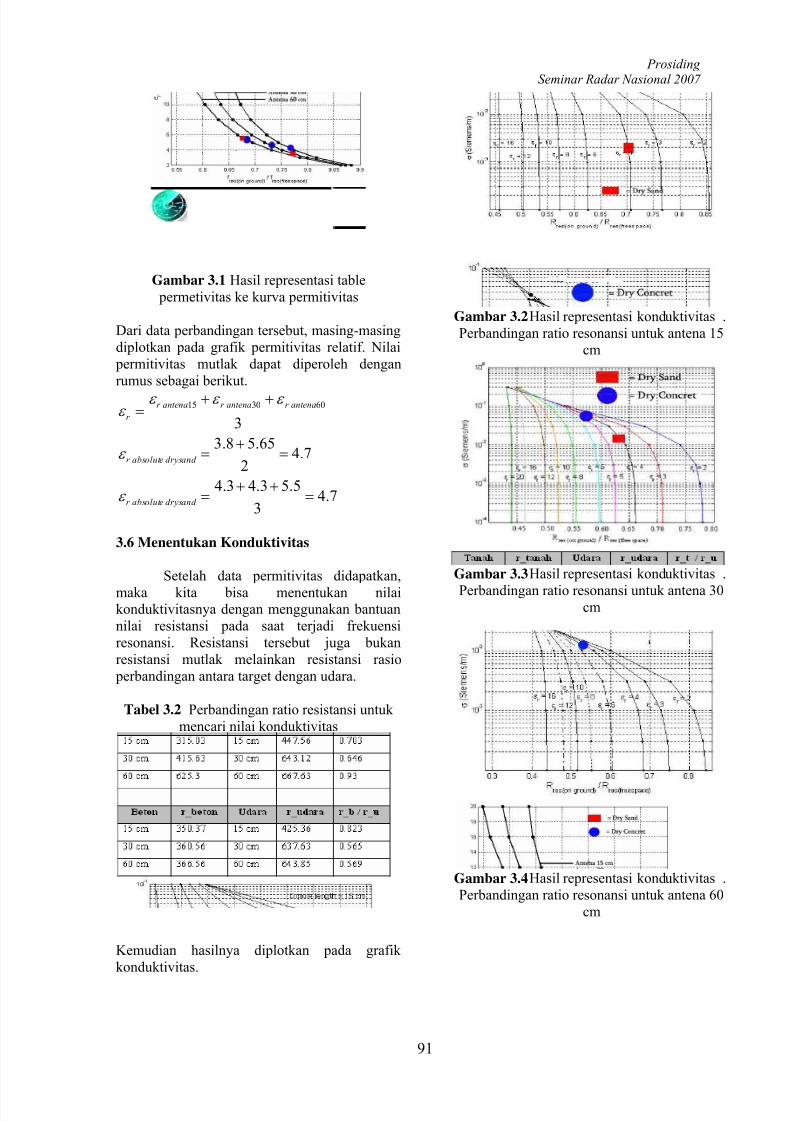
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 99/156
ProsidingSeminar Radar Nasional 2007
Gambar 3.1 Hasil representasi table permetivitas ke kurva permitivitas
Dari data perbandingan tersebut, masing-masingdiplotkan pada grafik permitivitas relatif. Nilai permitivitas mutlak dapat diperoleh denganrumus sebagai berikut.
15 30 60
3
3.8 5.654.7
2
4.3 4.3 5.54.7
3
r antena r antena r antena
r
r absolute drysand
r absolute drysand
ε ε ε ε
ε
ε
+ +=
+= =
+ += =
3.6 Menentukan Konduktivitas
Setelah data permitivitas didapatkan,
maka kita bisa menentukan nilaikonduktivitasnya dengan menggunakan bantuannilai resistansi pada saat terjadi frekuensiresonansi. Resistansi tersebut juga bukanresistansi mutlak melainkan resistansi rasio perbandingan antara target dengan udara.
Tabel 3.2 Perbandingan ratio resistansi untukmencari nilai konduktivitas
Kemudian hasilnya diplotkan pada grafikkonduktivitas.
Gambar 3.2 Hasil representasi konduktivitas .Perbandingan ratio resonansi untuk antena 15
cm
Gambar 3.3 Hasil representasi konduktivitas .
Perbandingan ratio resonansi untuk antena 30cm
Gambar 3.4 Hasil representasi konduktivitas .Perbandingan ratio resonansi untuk antena 60
cm
91
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 100/156
ProsidingSeminar Radar Nasional 2007
15 30 60
3
0.002 0.0150.0085
2
0.065 0.012 0.03852
antena antena antenaabsolut
drysand
dryconcret
σ σ σ σ
σ
σ
+ +=
+= =
+= =
3.7 Menentukan Kedalaman Yang Terukur
Pada analisa domain waktu ini, kita bisamengukur besarnya delay antara pulsa forwarddan pulsa reverse. Dan dengan adanya nilai permitivitas dari target yang diukur, kita bisamengetahui kecepatan gelombang menembustarget tersebut. Dengan adanya kedua informasidiatas, maka kedalaman tanah yang akan diukur
bisa diketahui dengan rumus sebagai berikut.8
8
tan
15 30 60tan
tan
3 101.383 10 /
4.7
2
( )
3
0.207 0.242 0.1720.2073
subtrat
r
kembali da g
pulsa
subtrat pulsa
antena antena antenamutlak ah
mutlak ah
c xv x
t t t
kedalaman s v xt
S S S S
S
ε = = =
−=
=
+ +=
+ +=
m s
m=
4. KESIMPULAN
Setelah melakukan semua proses perancangan,simulasi, realisasi dan pengukuran antena wire
dipole dengan panjang 15 cm, 30cm, dan 60 cm,maka dapat disimpulkan bahwa :1. Dengan menggunakan analisa FDTD 3D
terbukti bahwa dengan penempatan antena pada media lossy dielektrik dapatmengurangi efek ringging.
2. Substrat dengan komposisi molekul yang padat dan kompak memiliki penetrasigelombang yang dangkal daripada molekulyang renggang.
3. Antena dengan panjang 60 cm memilikitingkat penetrasi yang lebih dangkal daripadaantena dengan panjang 15 cm dan 30 cm.
4. Dalam pengukuran tingkat permitivitas relatifsimulasi untuk pasir kering adalah 3.42, padatabel permitivitas 4 dan pengukuran yangsesungguhnya 4,2. Dan untuk beton keringadalah 14.26, pada tabel permitivitas 15 dan pengukuran yang sesungguhnya 4,7.
5. Dalam pengukuran tingkat konduktivitassimulasi untuk pasir kering adalah 0.007, pada tabel permitivitas 0.005 dan pengukuranyang sesungguhnya 0.0085. Dan untuk beton
kering adalah 0.030, pada tabel konduktivitas0.034 dan pengukuran yang sesungguhnya0.0385
6. Command Mat3D dalam FDTD 3D sangatdianjurkan untuk digunakan karena commandini dapat mengetahui secara geometrikebenaran dan kesalahan dalam menentukangeometri antena
5. DAFTAR PUSTAKA
[1] Iskander, Magdy F., Elegtromagnetic
Fields and Waves, Prentice Hall, 1992..[2] Judawisastra,Herman, Catatan Kuliah :Antena dan Propagasi, Penerbit ITB.[3] Kraus, Jhon, Antennas, McGraw-Hill,1988.[4]. A.A. Lestari, A.G Yarovoy, L.PLighart,”Ground Influence on the inputImpedance of transient dipole and bowtieantennas” IEEE trans. Antennas Propagate,vol.52,no.8,pp.1970-1975,aug.2004
92

8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 101/156
Prosiding
Seminar Radar Nasional 2007
Shaking Mechanism Dynamics for Micro-strip Array Antenna
Used in Surveillance Coastal Radars
Edwar Yazid and Estiko Rijanto
Pusat Penelitian Tenaga Listrik dan Mekatronik (Puslit Telimek),LEMBAGA ILMU PENGETAHUAN INDONESIA (LIPI),
Research Center for Electrical Power and Mechatronics,INDONESIAN INSTITUTE OF SCIENCES,
Jl. Cisitu No.21/154D, Bandung 40135, Indonesia; email: [email protected].
Abstrak
Di dalam makalah ini diusulkan sebuah mekanisme baru yang disebut mekanisme penggeleng yangdigunakan untuk menggerakkan antenna radar jenis micro-strip array yang dipakai pada radar pantai. Salah satu keunggulan jenis antena micro-strip array adalah memiliki masa yang ringan. Jika prinsip frekuensi-modulated continuous wave (FMCW) yang digunakan sebagai radar maka tidak mememerlukan catu dayatinggi seperti pada radar pulsa. Kombinasi penggunaan radar jenis micro-strip array dan prinsip FMCW
berkontribusi pada penghematan energi. Mekanisme menggelengkan antena ke kanan dan ke kiri arah suduthorisontal yang diusulkan pada makalah ini bertujuan untuk lebih meningkatkan mutu hasil pengolahan sinyalradar. Di dalam makalah ini telah dilakukan perbandingan antara mekanisme rotasi konvensional denganmekanisme baru yang diusulkan. Hasil analisa numerik menunjukkan bahwa mekanisme yang diusulkan dapatmeningkatkan jumlah hit per siklus rotasi dan dapat meningkatkan nilai rasio S/N, tetapi dengan biaya berupa
kebutuhan energi tambahan karena adanya pengaruh inersia mekanisme.
Kata kunci: Mekanisme penggeleng, antena, radar pantai, micro-strip array,FMCW, rotasi, rasio S/N.
Abstract
This paper proposes a new mechanism named shaking mechanism used for moving micro-strip array radarantenna which is used in coastal radars. One advantage of micro-strip array antenna is that it is light weight.
On the other hand, by using frequency modulated continuous wave (FMCW) radar it requires lower output power than pulse radars hence avoids hardware complications which arise as a result of high powerrequirements. Combination between micro-strip array antenna and FMCW radar contributes to energy saving.The shaking mechanism which moves the coastal radar beam point in azimuth direction is proposed in this paper
to further enhance the quality of radar signal processing. Comparison study has been conducted between the proposed mechanism and the conventional rotation mechanism. From numerical analysis results obtained in this
study, it is concluded that the proposed shaking mechanism enhances number of hit per cycle and enlarges S/Nratio value at the cost of additional energy consumption due to inertia of the mechanism.
Key words: shaking mechanism, antenna, coastal radar, micro-trip array, FMCM, rotation, S/N ratio.
1. Introduction
To extract radar target information froman echo signal, the signal must first beconditioned to have sufficient magnitude toovercome the effects of interference. Radarequation is used to predict echo power andinterfering power to help in making thedetermination of whether or not the conditionis satisfied. A surveillance radar presents aspecial case of radar equation for two reasons, both related to its search pattern. It has a
limited time-on-target ( -the time for eachscan that a particular target is within the beam
of the antenna), and it does not point the peakgain of the antenna at targets for all hits in alook.
OT T
A surveillance radar must scan rapidly tocover their assigned scan area in as short atime as possible. Also, short scan time reducesthe radar target maneuvering possible betweenscans and help maintain more accurate target position report. However, it must scan slowlyenough so that the required number of hits isreceived from within the antenna’s beam width.
Radar equation for a surveillance radar is
unique primarily because of the need to useantenna scan rate, beam width, and PRF to
93

8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 102/156
ProsidingSeminar Radar Nasional 2007
account for the antenna scan loss and therequired integration number. In a system wherethe signal processor determines integrationnumber (all digital signal processors), the scanrate can be set so that the number of pulsestransmitted as the antenna beam scans past agiven point matches the integration number inthe signal processor.
The time-on-target is the time the
antenna beam requires to scan one antenna beam width. Another parameter is data
gathering time ( ), also known as dwell time
( ), integration time , and look time . If
the beam width, scan rate, PRF, and signal
processing match one another, and are
equal. If the scan and integration parameters
match the following holds [1]
OT T
d T
d T I T LT
OT T d T
ω
θ )(3 Az
OT d T T == (1)
where )(3 Az θ is the 3 dB azimuth beam width
of the antenna [degree], and ω is the antenna
scan rate [degree/second]. More over, thesignal-to-noise ratio (S/N) for the surveillanceradar is proportional to the 3 dB azimuth beamwidth as well as PRF and proportional to theinverse of the scan rate [2].
ω
θ PRF
N S
Az ⋅
≈
)(3
/ (2)Continuous Wave (CW) and Frequency
Modulated Continuous Wave (FMCW) radars presents an entirely different problemregarding the prediction of signal-to-interference and maximum detection/trackingranges than do pulsed radars. The primarydifference is that, while in pulse radars,receiver noise is the ultimate limitinginterference, in CW and FMCW radars, theultimate limiting interference is usually
contamination of the receiver input by thetransmitter which is called spillover.If a CW or FMCW radar has sufficient
isolation between transmitter and receiver andsufficient transmit stability, noise again becomes limiting, and the system can betreated much the same as if it was a pulsedradar. The signal-to-noise (S/N) ratio for a CWor FMCW radar limited by receiver noise is
proportional to the look (dwell) time [1]. LT
S
L L
f
N T = (3)
where is the number of samples in a dwell,
and is the sample frequency [Hz].
L N
S f
Applications like coastal managementand ship guidance required increased datadensity compared to single point
measurements with current meters and wave bouys. Remote sensing techniques also havethe advantage of no need to install a mooringin the open sea, which can be damaged by badweather conditions or ships passing too near.High frequency radars at 25 MHz to 30 MHzhave been used as coastal radars with ground-wave propagation [3].
Mechanical technology playsimportant role in radar technologydevelopment. One example whichdemonstrates the significance of mechanical
technology development can be found in the paper entitled Mechanical TechnologyDevelopment on a 35-m Deployable RadarAntenna for Monitoring Hurricanes [4].
In order to solve the trade off betweenthe S/N ratio specification and maneuveringtarget position detection accuracy specification,in this paper a new antenna rotatingmechanism named shaking mechanism is proposed. The shaking mechanism isconsidered to be feasible since it is used tomove a micro-strip array antenna which isusually light in weight. This new mechanism provides an advantage where it is applied to asurveillance coastal radar since the radar needsonly to scan the area in the sea direction.
2. Antenna Shaking Mechanism
Figure 1 shows an illustration of themicro-strip array antenna used in asurveillance coastal radar. Radar antenna hasseveral functions including: 1) act as a
transducer and impedance match between thetransmitter and the propagation medium, and between the medium and the receiver, 2) provide gain to concentrate the transmittedsignal in a preferred direction, 3) steer thetransmitted power to the desired angular position, and 4) provide for effective receptionover a small angular direction only and tomove the response to the desired direction(steer the received beam).
In a conventional surveillance coastalradar, the antenna is rotated in a certain
angular velocity. An example of antenna usedfor a coastal radar has horizontal beam width
94
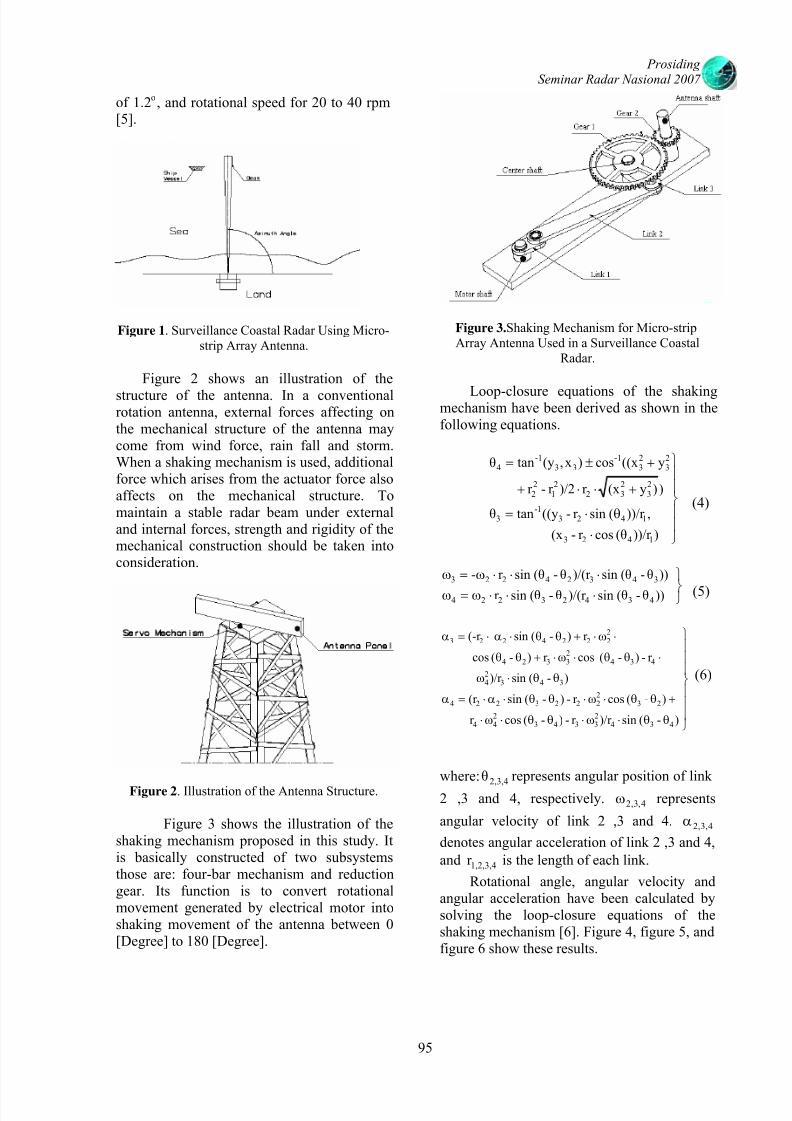
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 103/156
ProsidingSeminar Radar Nasional 2007
of 1.2o , and rotational speed for 20 to 40 rpm[5].
Figure 1. Surveillance Coastal Radar Using Micro-strip Array Antenna.
Figure 2 shows an illustration of the
structure of the antenna. In a conventionalrotation antenna, external forces affecting onthe mechanical structure of the antenna maycome from wind force, rain fall and storm.When a shaking mechanism is used, additionalforce which arises from the actuator force alsoaffects on the mechanical structure. Tomaintain a stable radar beam under externaland internal forces, strength and rigidity of themechanical construction should be taken intoconsideration.
Figure 2. Illustration of the Antenna Structure.
Figure 3 shows the illustration of theshaking mechanism proposed in this study. Itis basically constructed of two subsystemsthose are: four-bar mechanism and reductiongear. Its function is to convert rotationalmovement generated by electrical motor intoshaking movement of the antenna between 0[Degree] to 180 [Degree].
Figure 3. Shaking Mechanism for Micro-stripArray Antenna Used in a Surveillance Coastal
Radar.
Loop-closure equations of the shakingmechanism have been derived as shown in thefollowing equations.
)))/r (θcosr -(x
,))/r (sinr -((ytanθ
))y(xr )/2r -r
y((xcos)x,(ytanθ
1423
14231-
3
23
232
21
22
23
23
-133
-14
⎪⎪
⎭
⎪⎪
⎬
⎫
⋅
θ⋅=
+⋅⋅+
+±=
(4)
))θ-(θsin)/(r θ-(θsinr
))θ-(θsin)/(r θ-(θsinr -
43423224
34324223
⎭⎬
⎫
⋅⋅⋅ω=ω
⋅⋅⋅ω=ω
(5)
)-(sin)/r r -)-(cosr
)-(cosr -)-(sin(r
)-(sin)/r
r -)-( cosr )-(cos
r )-(sin(-r
43423343
244
2322223224
34324
43423324
22224223
⎪⎪⎪
⎭
⎪⎪⎪
⎬
⎫
θθ⋅ω⋅θθ⋅ω⋅
+θθ⋅ω⋅θθ⋅α⋅=α
θθ⋅ω
⋅θθ⋅ω⋅+θθ
⋅ω⋅+θθ⋅α⋅=α
(6)
where: represents angular position of link
2 ,3 and 4, respectively. represents
angular velocity of link 2 ,3 and 4.
2,3,4
θ
4,3,2ω
4,3,2α
denotes angular acceleration of link 2 ,3 and 4,
and is the length of each link.1,2,3,4r
Rotational angle, angular velocity andangular acceleration have been calculated bysolving the loop-closure equations of theshaking mechanism [6]. Figure 4, figure 5, andfigure 6 show these results.
95
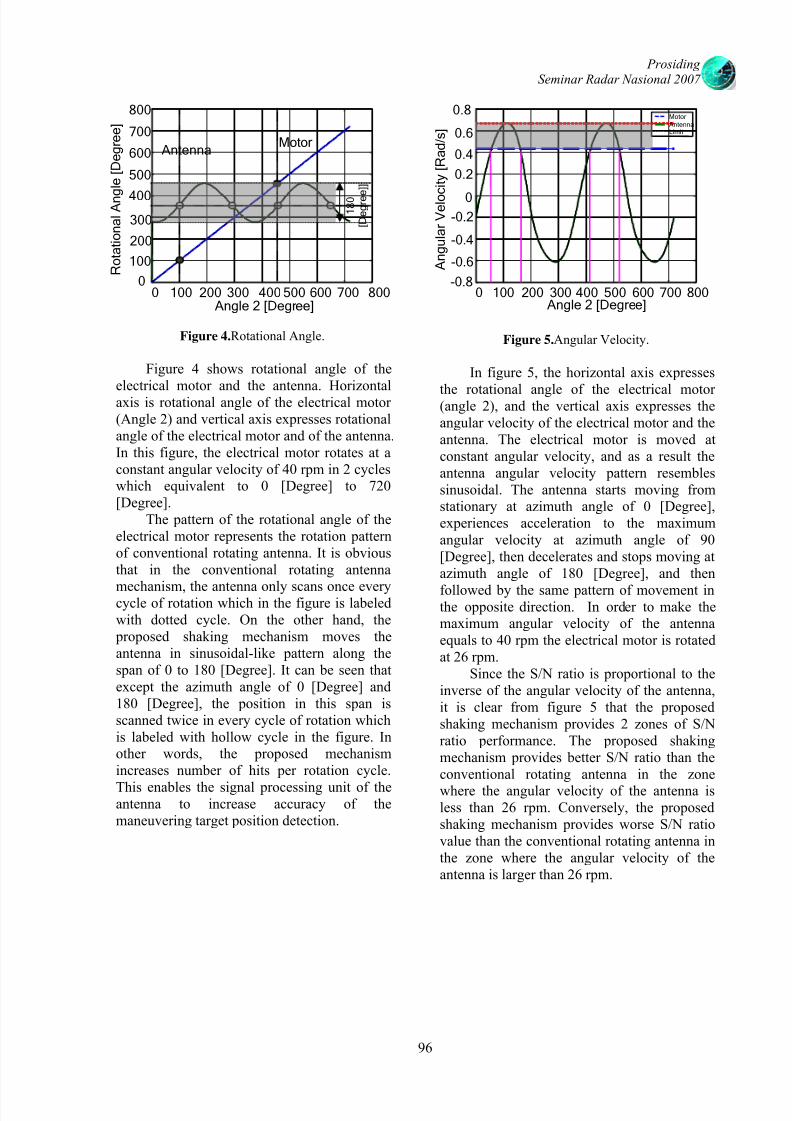
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 104/156
ProsidingSeminar Radar Nasional 2007
Figure 4. Rotational Angle.
Figure 4 shows rotational angle of the
electrical motor and the antenna. Horizontalaxis is rotational angle of the electrical motor(Angle 2) and vertical axis expresses rotationalangle of the electrical motor and of the antenna.In this figure, the electrical motor rotates at aconstant angular velocity of 40 rpm in 2 cycleswhich equivalent to 0 [Degree] to 720[Degree].
The pattern of the rotational angle of theelectrical motor represents the rotation patternof conventional rotating antenna. It is obviousthat in the conventional rotating antenna
mechanism, the antenna only scans once everycycle of rotation which in the figure is labeledwith dotted cycle. On the other hand, the proposed shaking mechanism moves theantenna in sinusoidal-like pattern along thespan of 0 to 180 [Degree]. It can be seen thatexcept the azimuth angle of 0 [Degree] and180 [Degree], the position in this span isscanned twice in every cycle of rotation whichis labeled with hollow cycle in the figure. Inother words, the proposed mechanismincreases number of hits per rotation cycle.
This enables the signal processing unit of theantenna to increase accuracy of themaneuvering target position detection.
Figure 5. Angular Velocity.
In figure 5, the horizontal axis expresses
the rotational angle of the electrical motor(angle 2), and the vertical axis expresses theangular velocity of the electrical motor and theantenna. The electrical motor is moved atconstant angular velocity, and as a result theantenna angular velocity pattern resemblessinusoidal. The antenna starts moving fromstationary at azimuth angle of 0 [Degree],experiences acceleration to the maximumangular velocity at azimuth angle of 90[Degree], then decelerates and stops moving atazimuth angle of 180 [Degree], and then
followed by the same pattern of movement inthe opposite direction. In order to make themaximum angular velocity of the antennaequals to 40 rpm the electrical motor is rotatedat 26 rpm.
Since the S/N ratio is proportional to theinverse of the angular velocity of the antenna,it is clear from figure 5 that the proposedshaking mechanism provides 2 zones of S/Nratio performance. The proposed shakingmechanism provides better S/N ratio than theconventional rotating antenna in the zone
where the angular velocity of the antenna isless than 26 rpm. Conversely, the proposedshaking mechanism provides worse S/N ratiovalue than the conventional rotating antenna inthe zone where the angular velocity of theantenna is larger than 26 rpm.
0 100 200 300 400 500 600 700 800-0.8
-0.6
-0.4
-0.20
0.2
0.4
0.6
0.8Motor
AntennaLimit
0 100 200 300 400 500 600 700 8000
100
200
300
400
500
600
700
800
1 8 0
[ D e g r e e ] ]
Angle2[Degree]
Motor Antenna
R o t a t i o n a l A n g l e
[ D e g r e e ]
A n g u l a r V e l o c i t y
[ R a d / s ]
Angle2[Degree]
96
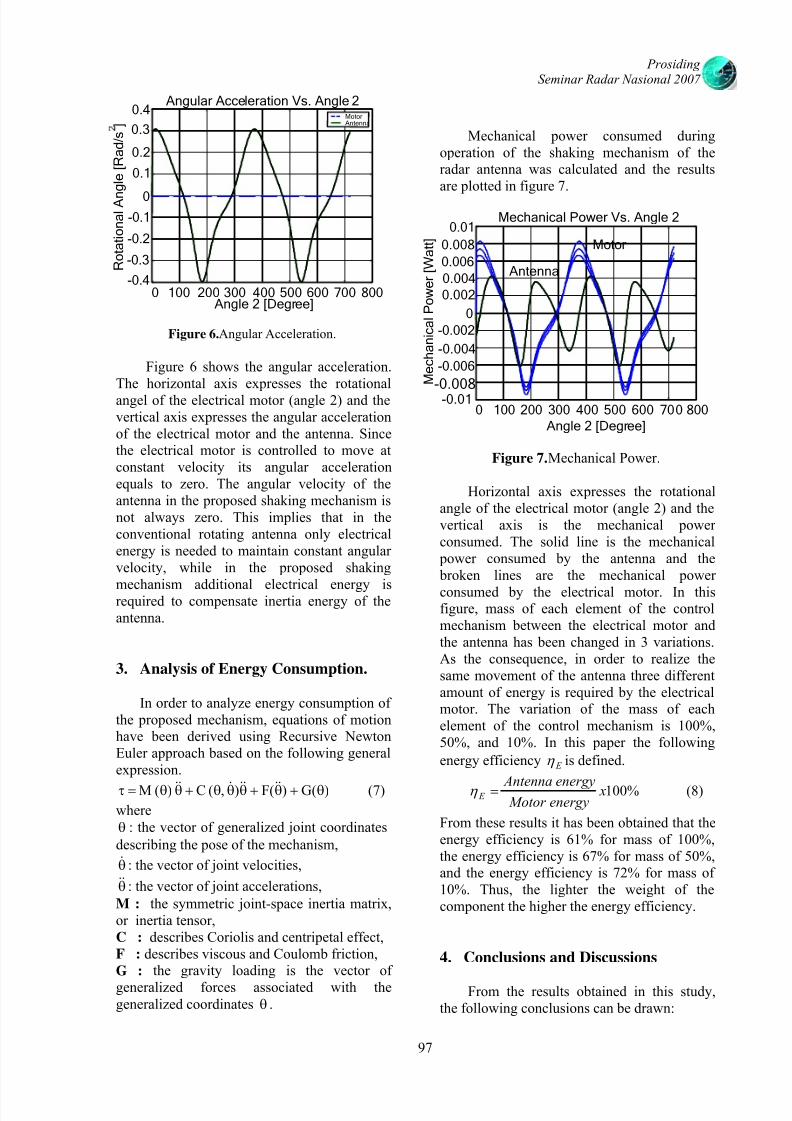
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 105/156
ProsidingSeminar Radar Nasional 2007
Figure 6. Angular Acceleration.
Figure 6 shows the angular acceleration.The horizontal axis expresses the rotationalangel of the electrical motor (angle 2) and thevertical axis expresses the angular accelerationof the electrical motor and the antenna. Sincethe electrical motor is controlled to move atconstant velocity its angular accelerationequals to zero. The angular velocity of theantenna in the proposed shaking mechanism isnot always zero. This implies that in theconventional rotating antenna only electricalenergy is needed to maintain constant angularvelocity, while in the proposed shaking
mechanism additional electrical energy isrequired to compensate inertia energy of theantenna.
3. Analysis of Energy Consumption.
In order to analyze energy consumption ofthe proposed mechanism, equations of motionhave been derived using Recursive NewtonEuler approach based on the following generalexpression.
)G()(F),(C)(M θ+θ+θθθ+θθ=τ &&&&&&& (7)
where
θ : the vector of generalized joint coordinates
describing the pose of the mechanism,
θ& : the vector of joint velocities,
θ&& : the vector of joint accelerations,
M : the symmetric joint-space inertia matrix,or inertia tensor,C : describes Coriolis and centripetal effect,F : describes viscous and Coulomb friction,G : the gravity loading is the vector of
generalized forces associated with thegeneralized coordinates θ .
Mechanical power consumed duringoperation of the shaking mechanism of theradar antenna was calculated and the resultsare plotted in figure 7.
Figure 7. Mechanical Power.
Horizontal axis expresses the rotationalangle of the electrical motor (angle 2) and thevertical axis is the mechanical powerconsumed. The solid line is the mechanical power consumed by the antenna and the broken lines are the mechanical power
consumed by the electrical motor. In thisfigure, mass of each element of the controlmechanism between the electrical motor andthe antenna has been changed in 3 variations.As the consequence, in order to realize thesame movement of the antenna three differentamount of energy is required by the electricalmotor. The variation of the mass of eachelement of the control mechanism is 100%,50%, and 10%. In this paper the following
energy efficiency E η is defined.
%100 xenergy Motor energy Antenna E =η (8)
From these results it has been obtained that theenergy efficiency is 61% for mass of 100%,the energy efficiency is 67% for mass of 50%,and the energy efficiency is 72% for mass of10%. Thus, the lighter the weight of thecomponent the higher the energy efficiency.
AngularAccelerationVs.Angle2
4. Conclusions and Discussions
From the results obtained in this study,the following conclusions can be drawn:
0 -0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4 Motor Antenna
R o t a t i o n a l A n
g l e
[ R a d / s ]
MechanicalPowerVs.Angle2
0 100 200 300 400 500 600 700 800-0.01
0
0.002
0.004
0.006
0.008
0.01
M e c h a n i c a l P o w e r [ W a t t ]
Motor
Antenna
100
Angle2[Degree]
Angle2[Degree] 200 400 500 300 600 700 800
-0.002
-0.004
-0.006
-0.008
97
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 106/156
ProsidingSeminar Radar Nasional 2007
6. References1) The proposed shaking mechanism
increases number of hit per cycle, thusincreases the maneuvering target position detection accuracy.
[1] Byron Edde, ”RADAR: Principles,Technology, Applications”, Prentice HallInc., New Jersey, 1993.
2) The shaking mechanism provides betterS/N ratio than the conventional rotatingantenna where the angular velocity isless than 26 rpm and it provides worseS/N ratio than the conventional rotatingantenna where the angular velocity ishigher than 26 rpm.
[2] IEEE Standard Radar Definition, Instituteof Electrical and Electronics EngineersStandard 686-1982, New York, 1982.
[3] K.W.Gurgel, H.H.Essen, andT.Schlick, ”Application of Coastal Radarsfor Monitoring the Coastal Zone”,Euromar Workshop’99, 1999.
3) The shaking mechanism requiresadditional energy supply to realize theantenna movement due to inertia energyconsumption.
[4] Houfei Fang and Eastwood Im,“Mechanical Technology Development ona 35-m Deployable Radar Antenna forMonitoring Hurricanes”, Earth ScienceTechnology Conference 2006, June 28th,
2006.
4) The energy efficiency of the proposed
mechanism can be enlarged by usinglight weight component of the shakingmechanism compared to the mass of theantenna.
[5] Masbah RT.Siregar, et.al., “Developmentof Coastal Surveillance Radar in a Radar Network”, Proposal for a CooperativeResearch Project, Indonesian Institute ofSciences and Delf University ofTechnology, 2006.5. Acknowledgment
The authors would like to thanks to Mr.Muhammad Fathul Hikmawan for hisassistance in making mechanical drawings.
[6] A.R.Holowenko and Cendy Prapto,“Dinamika Permesinan”, PenerbitErlangga, 1992.
98

8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 107/156
ProsidingSeminar Radar Nasional 2007
Perhitungan Faktor Reflektivitas Radar dan Intensitas Hujan
dari Pengukuran Distribusi Ukuran Titik Hujan di Surabaya
Lince Markis1,2 ) , Gamantyo Hendrantoro1 ) , Achmad Mauludiyanto1) 1)Institut Teknologi Sepuluh Nopember,Fakultas Teknologi Industri,Jurusan Teknik Elektro
Kampus ITS Sukolilo, Surabaya 60111 INDONESIA2)Politeknik Negeri Padang ,Jurusan Teknik ElektroKampus Limau Manis , Padang INDONESIA
Email : [email protected] , [email protected] , [email protected]
Abstrak
Salah satu besaran yang digunakan dalam radar cuaca adalah factor reflektivitas radar. Dalam penelitian ini akanmembahas mengenai perhitungan factor reflektifitas radar dan intensitas hujan dari pengukuran distribusi ukuran
titik hujan di Surabaya dengan menggunakan alat Disrometer. Kemudian membandingkan dengan penelitian sebelumnya Marshall-Palmer dan Matsuo Sekine. Faktor reflektivitas radar yang dihasilkan berbeda dengan yangditurunkan dari Marshall-Palmer.
Kata kunci: Faktor Reflektifitas Radar, Distribusi Ukuran Titik Hujan, Intensitas Hujan.
Pendahuluan
Radar cuaca menggunakan besaran faktorreflektivitas radar Z dalam mengukur intensitashujan. Besaran Z ini kemudian diubah keintensitas hujan R dengan menerapkan relasi Z-
R yang berbentuk . Koefisien a dan b
dapat dihitung dengan regresi linier berdasarkandistribusi ukuran titik hujan (DSD). Beberapa penelitian telah melakukan penelitian untukmenghitung faktor reflektivitas radar. Marshall-Palmer [1] telah menghasilkan faktor
reflektifitas . Sekine [2]
menghasilkan nilai faktor reflektivitas
yang berbeda dengan Marshall-
Palmer melalui perhitungan distribusi titik hujandengan model distribusi Weibull. Selain itudistribusi ukuran titik hujan Marshall-Palmeruntuk Rayleigh scattering [3] mendapatkan hasil
yang berbeda dimana . Dari
penelitian [4] Joss- Waldvogel yang jugamenggunakan alat ukur disdrometer dandibandingkan dengan alat ukur yang lain sepertispectrometer dan Doppler radar untukmendapatkan hubungan antara distribusi ukurantitik hujan dan diameter titik hujan. Pada penelitian ini digunakan rumus distribusi ukurantitik hujan dari Joss-Waldvogel. Kemudian pada peneliti selanjutnya [5] mengenai hubunganatenuasi spesifik (Y) terhadap intensitas hujan(R) dan Reflektivitas radar (Z). Pada penelitian
ini kami melakukan pengukuran distribusiukuran titik hujan dengan menggunakan alatukur Disdrometer untuk menghitung nilai faktor
reflektivitas radar kususnya untuk wilayahIndonesia. Perbedaan nilai distribusi titik hujandari model Marshal-Palmer yang dibandingkandengan Sekine menunjukan bahwa modelMarshal-Palmer yang menjadi dasar penggunaan pada negara-negara tropis tidaksesuai namun dari hasil penelitian tersebut sudahmenunjukan persamaan bentuk kurva yang linier.Pada paper ini dijelaskan tentang pendahuluan
pada bagian 1, distribusi ukuran titik hujan(DSD) dan hubungan reflektivitas radar (Z) dancurah hujan (R) pada bagian 2, pengukuran dananalisa pada bagian 3, hasil yang didapatkan pada bagian 4 kemudian kesimpulan dari penelitian ini pada bagian 5.
b Ra Z .=
6.1.200 R Z =
6.1.286 R Z =
47.1.296 R Z =
Parameter-parameter Hujan
Distribusi ukuran titik hujan Joss-Waldvogel[4] :
DT v A
C D N
T ∆∆= ...)( (1)
Fungsi N(D) merepresentasikan jumlah dari titikhujan per interval diameter dalam millimeter dan per meter kubik di udara. Dengan N(D) adalahdistribusi ukuran titik hujan dalam m-3mm-1, C jumlah titik hujan, A luasan sensor cm2, vT
terminal velocity ms-1, T ∆ periode rata-rata
dalam detik, D∆ selisih diameter mm.Intensitas hujan dalam mm/jam menurut
Roderic [6]. Dengan intensitas hujan R mm/jam,diameter titik hujan D mm, distribusi ukuran
99
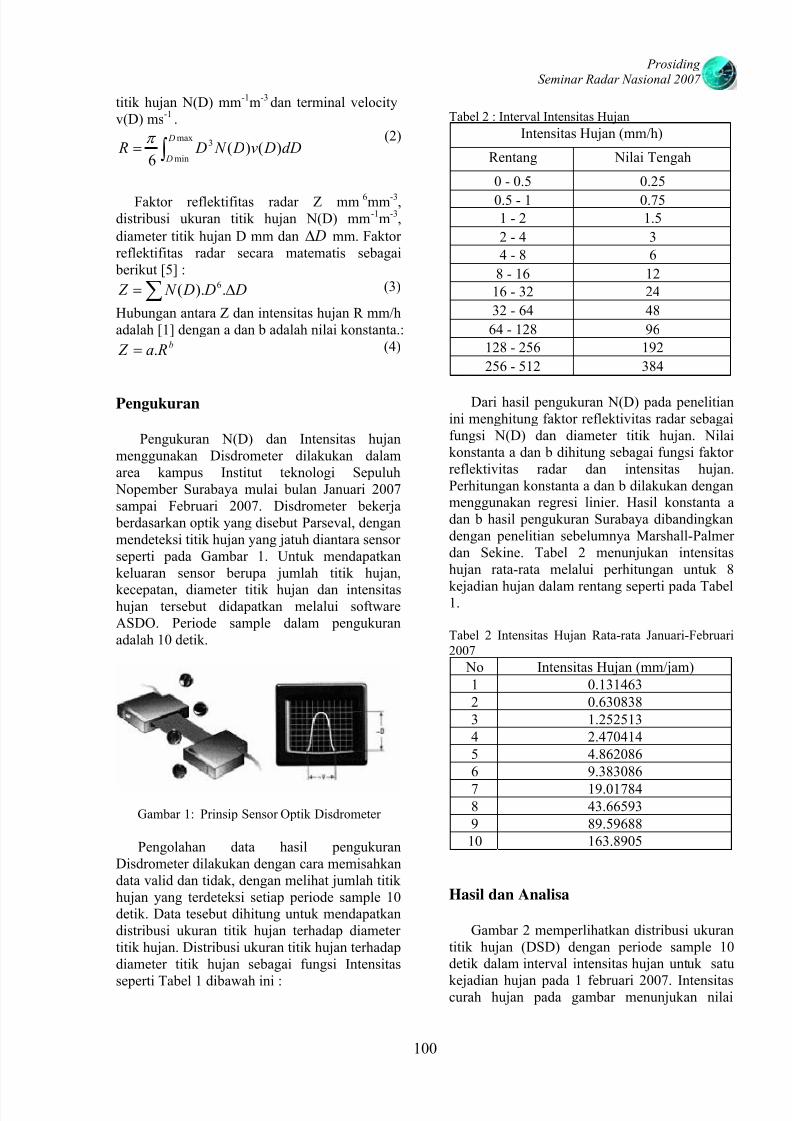
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 108/156
ProsidingSeminar Radar Nasional 2007
titik hujan N(D) mm-1m-3 dan terminal velocityv(D) ms
-1.
dD Dv D N D R D
D)()(
6
max
min
3∫= π
(2)
Faktor reflektifitas radar Z mm 6mm-3,distribusi ukuran titik hujan N(D) mm-1m-3,
diameter titik hujan D mm dan mm. Faktorreflektifitas radar secara matematis sebagai berikut [5] :
D∆
∑ ∆= D D D N Z .).( 6 (3)
Hubungan antara Z dan intensitas hujan R mm/hadalah [1] dengan a dan b adalah nilai konstanta.:
b Ra Z .= (4)
Pengukuran
Pengukuran N(D) dan Intensitas hujanmenggunakan Disdrometer dilakukan dalamarea kampus Institut teknologi Sepuluh Nopember Surabaya mulai bulan Januari 2007sampai Februari 2007. Disdrometer bekerja berdasarkan optik yang disebut Parseval, denganmendeteksi titik hujan yang jatuh diantara sensorseperti pada Gambar 1. Untuk mendapatkankeluaran sensor berupa jumlah titik hujan,
kecepatan, diameter titik hujan dan intensitashujan tersebut didapatkan melalui softwareASDO. Periode sample dalam pengukuranadalah 10 detik.
Gambar 1: Prinsip Sensor Optik Disdrometer
Pengolahan data hasil pengukuranDisdrometer dilakukan dengan cara memisahkandata valid dan tidak, dengan melihat jumlah titikhujan yang terdeteksi setiap periode sample 10detik. Data tesebut dihitung untuk mendapatkandistribusi ukuran titik hujan terhadap diametertitik hujan. Distribusi ukuran titik hujan terhadapdiameter titik hujan sebagai fungsi Intensitas
seperti Tabel 1 dibawah ini :
Tabel 2 : Interval Intensitas Hujan
Intensitas Hujan (mm/h)
Rentang Nilai Tengah
0 - 0.5 0.25
0.5 - 1 0.751 - 2 1.5
2 - 4 3
4 - 8 6
8 - 16 12
16 - 32 24
32 - 64 48
64 - 128 96
128 - 256 192
256 - 512 384
Dari hasil pengukuran N(D) pada penelitianini menghitung faktor reflektivitas radar sebagaifungsi N(D) dan diameter titik hujan. Nilaikonstanta a dan b dihitung sebagai fungsi faktorreflektivitas radar dan intensitas hujan.Perhitungan konstanta a dan b dilakukan denganmenggunakan regresi linier. Hasil konstanta adan b hasil pengukuran Surabaya dibandingkandengan penelitian sebelumnya Marshall-Palmerdan Sekine. Tabel 2 menunjukan intensitashujan rata-rata melalui perhitungan untuk 8
kejadian hujan dalam rentang seperti pada Tabel1.
Tabel 2 Intensitas Hujan Rata-rata Januari-Februari2007
No Intensitas Hujan (mm/jam)
1 0.131463
2 0.630838
3 1.252513
4 2.470414
5 4.862086
6 9.383086
7 19.017848 43.66593
9 89.59688
10 163.8905
Hasil dan Analisa
Gambar 2 memperlihatkan distribusi ukurantitik hujan (DSD) dengan periode sample 10detik dalam interval intensitas hujan untuk satu
kejadian hujan pada 1 februari 2007. Intensitascurah hujan pada gambar menunjukan nilai
100
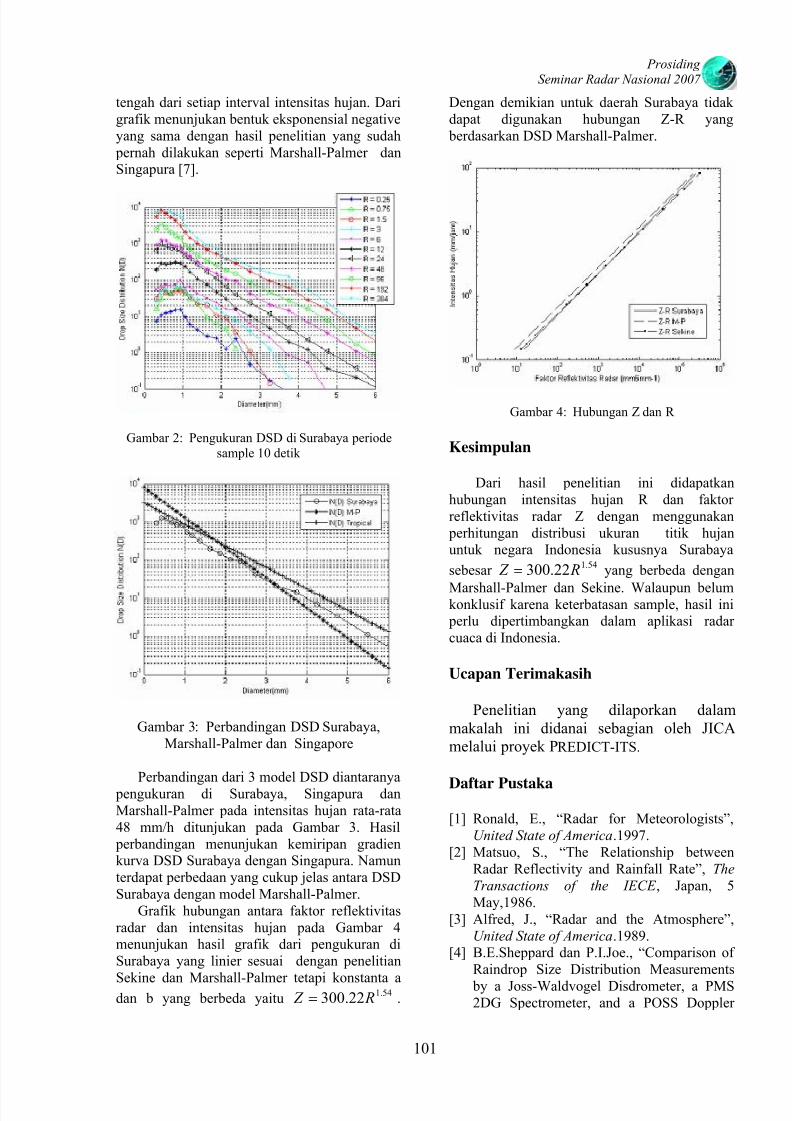
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 109/156
ProsidingSeminar Radar Nasional 2007
tengah dari setiap interval intensitas hujan. Darigrafik menunjukan bentuk eksponensial negativeyang sama dengan hasil penelitian yang sudah pernah dilakukan seperti Marshall-Palmer danSingapura [7].
Gambar 2: Pengukuran DSD di Surabaya periodesample 10 detik
Gambar 3: Perbandingan DSD Surabaya,Marshall-Palmer dan Singapore
Perbandingan dari 3 model DSD diantaranya pengukuran di Surabaya, Singapura danMarshall-Palmer pada intensitas hujan rata-rata48 mm/h ditunjukan pada Gambar 3. Hasil perbandingan menunjukan kemiripan gradienkurva DSD Surabaya dengan Singapura. Namunterdapat perbedaan yang cukup jelas antara DSDSurabaya dengan model Marshall-Palmer.
Grafik hubungan antara faktor reflektivitasradar dan intensitas hujan pada Gambar 4menunjukan hasil grafik dari pengukuran diSurabaya yang linier sesuai dengan penelitian
Sekine dan Marshall-Palmer tetapi konstanta adan b yang berbeda yaitu .
Dengan demikian untuk daerah Surabaya tidakdapat digunakan hubungan Z-R yang berdasarkan DSD Marshall-Palmer.
54.122.300 R Z =
Gambar 4: Hubungan Z dan R
Kesimpulan
Dari hasil penelitian ini didapatkanhubungan intensitas hujan R dan faktorreflektivitas radar Z dengan menggunakan perhitungan distribusi ukuran titik hujanuntuk negara Indonesia kususnya Surabaya
sebesar yang berbeda dengan
Marshall-Palmer dan Sekine. Walaupun belumkonklusif karena keterbatasan sample, hasil ini perlu dipertimbangkan dalam aplikasi radarcuaca di Indonesia.
54.122.300 R Z =
Ucapan Terimakasih
Penelitian yang dilaporkan dalammakalah ini didanai sebagian oleh JICAmelalui proyek PREDICT-ITS.
Daftar Pustaka
[1] Ronald, E., “Radar for Meteorologists”,United State of America.1997.
[2] Matsuo, S., “The Relationship betweenRadar Reflectivity and Rainfall Rate”, The Transactions of the IECE , Japan, 5May,1986.
[3] Alfred, J., “Radar and the Atmosphere”,United State of America.1989.
[4] B.E.Sheppard dan P.I.Joe., “Comparison ofRaindrop Size Distribution Measurements
by a Joss-Waldvogel Disdrometer, a PMS2DG Spectrometer, and a POSS Doppler
101

8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 110/156
ProsidingSeminar Radar Nasional 2007
Radar”, Atmosphere and Oceanic
Technology, Canada, 29 October, 1993.[6] Roderic L., “The Relationship in the
Calculation of Rain Attenuation ”, IEEE The Transactions on Antennas and Propagation,vol AP.26 , March ,1978.
[5] Gamantyo, H dan Zawadzki., “Derivation ofParameters of Y-Z Power-Law RelationFrom Raindrop Size DistributionMeasurements and Its Application in theCalculation of Rain Attenuation From RadarReflectivity Factor Measurements” IEEE
Transaction Antennas, vol, 5, January 2003.
[7] Tat-soon Yeo., “Tropical Raindrop SizeDistribution for the Prediction of RainAttenuation of Microwaves in the 10-40GHz Band”, The Transactions of Antennas
and Propagasi , vol 49, January ,2001.
102

8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 111/156
ProsidingSeminar Radar Nasional 2007
Pengukuran Variasi Temporal Curah Hujan
di Surabaya dengan Disdrometer Optic
Muriani 1,2), Gamantyo Hendrantoro 1), Achmad Mauludiyanto 1)
1) Institut Teknologi Sepuluh Nopember, Fakultas Teknologi Industri, Jurusan Teknik Elektro
Kampus ITS Sukolilo, Surabaya 60111, INDONESIAEmail : [email protected], [email protected], [email protected] 2) Universitas Sains dan Teknologi Jayapura, Teknik Elektro
Jl. Raya Sentani, Padang Bulan, Jayapura 99351, INDONESIA
Abstrak
Salah satu fungsi radar cuaca adalah mendeteksi adanya hujan, dan mengukur intensitasnya sebagai fungsi posisi citra radar cuaca diperbaharui sekali dalam beberapa menit tergantung dari kecepatan rotasi antena. Oleh
karena itu perlu dipertimbangkan variasi temporal curah hujan. Dimana pengukuran curah hujan secara langsungdilakukan di ITS Surabaya menggunakan disdrometer optic yang kemudian data ini dapat menjadi pertimbangandalam interprestasi Citra Radar khususnya dalam menganalisa variasi curah hujan terhadap waktu. Dalam penelitian ini diperoleh autokorelasi ternormalisasi rata-rata dari curah hujan yang akan dibandingkan dengan
data autokorelasi ternormalisasi Barcelona. Dimana diperoleh bahwa autokorelasi ternormalisasi pengukuran diSurabaya lebih tinggi dibandingkan Barcelona.
Kata kunci: Curah Hujan, Autokorelasi, Variasi Temporal.
Pendahuluan
Salah satu fungsi radar cuaca adalahmendeteksi adanya hujan, sekaligus mengukurintensitasnya sebagai fungsi posisi Citra radarcuaca diperbaharui sekali dalam beberapa menit,
tergantung dari kecepatan rotasi antena [1].Dengan demikian untuk analisa variasi temporalcurah hujan dengan radar perlu dipertimbangkankecepatan variasi curah hujan terhadap waktu.
Dipihak lain terobosan baru dibidangkomunikasi di Indonesia perlu dilakukan,misalnya pemakaian frekuensi diatas 10 GHz,karena semakin tinggi frekuensi akan semakin besar bandwith-nya. Namun pada systemkomunikasi radio dengan menggunakangelombang millimeter mengalami masalah yangdiakibatkan oleh redaman hujan dan efeknya
akan menggangu keandalan sistem komunikasi[2]. Indonesia dikenal mempunyai curah hujanyang sangat tinggi, sehingga efek dari redamanhujan sangat berpengaruh terhadap keandalanlink komunikasi.
Redaman hujan mengakibatkan terjadinyafading yaitu peristiwa pelemahan sinyal yangditerima oleh antena penerima berada dibawah batas threshold. Peristiwa fading ini sangat berpengaruh pada penyampaian gelombangelektromagnetik karena dapat menyebabkansinyal yang diterima akan terganggu. Terjadinyafading disebabkan oleh lamanya hujan dan besarnya curah hujan (mm/h) yang terjadi setiap
saat. Sehingga diperlukan pengukuran dan pencatatan dilapangan untuk mengetahui curahhujan rata-rata (mm/h) di suatu negara, yangkemudian data itu dapat dipakai untuk berbagaikalkulasi peredaman sinyal karena hujan.
Karena kurangnya penelitian tentang
karakteristik variasi temporal curah hujan untuknegara-negara yang memiliki iklim tropis untukitu dalam penelitian ini akan terfokus padakarakteristik pengukuran curah hujan yang berubah-ubah terhadap waktu (variasi temporal)dalam suatu daerah dengan geografis tertentuyang memiliki iklim tropis seperti di Indonesia.
Peneliti [3] telah meneliti suatu modelAutoregressive (AR) untuk simulasi curah hujandengan variasi waktu, dimana koefisien ARdiperoleh dari statistik curah hujan dan fungsiautokorelasi diperoleh dari pengukuran curah
hujan. Hasil autokorelasi ternormalisasi prediksimetode AR dibandingkan dengan hasil pengukuran Barcelona. Hasilnya menunjukkan bahwa metode AR cukup baik digunakansebagai model untuk mensimulasikan hujan.
Peneliti [4] juga meneliti tentang fungsiautokorelasi temporal dari redaman hujan padasebuah link komunikasi dapat diperoleh dari pengukuran redaman hujan secara langsung pada link komunikasi radio. Dimana dalamkasus ini diasumsikan panjang link kurang dari 1km dan curah hujannya bersifat homogen.
Peneliti [5] meneliti tentang ESD (EnergiSpectral Density), PSD (Power Spectral Density)
103
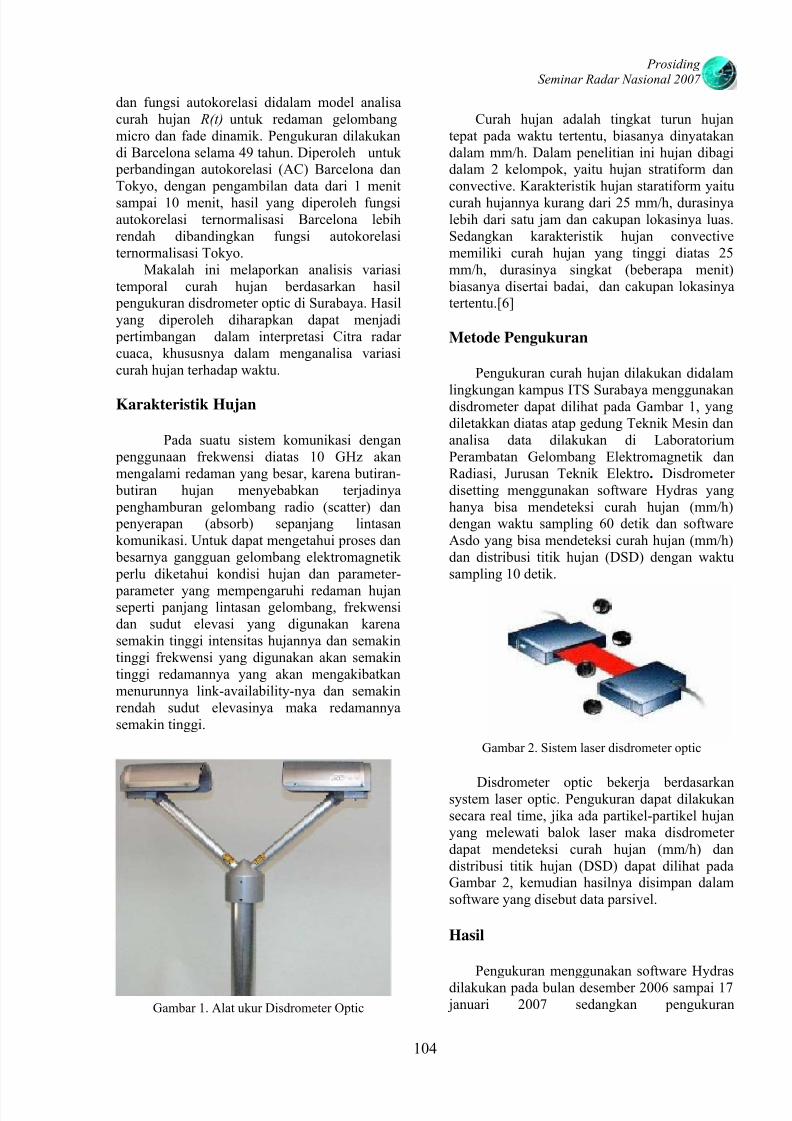
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 112/156
ProsidingSeminar Radar Nasional 2007
dan fungsi autokorelasi didalam model analisacurah hujan R(t) untuk redaman gelombangmicro dan fade dinamik. Pengukuran dilakukandi Barcelona selama 49 tahun. Diperoleh untuk perbandingan autokorelasi (AC) Barcelona danTokyo, dengan pengambilan data dari 1 menitsampai 10 menit, hasil yang diperoleh fungsiautokorelasi ternormalisasi Barcelona lebihrendah dibandingkan fungsi autokorelasiternormalisasi Tokyo.
Makalah ini melaporkan analisis variasitemporal curah hujan berdasarkan hasil pengukuran disdrometer optic di Surabaya. Hasilyang diperoleh diharapkan dapat menjadi pertimbangan dalam interpretasi Citra radarcuaca, khususnya dalam menganalisa variasicurah hujan terhadap waktu.
Karakteristik Hujan
Pada suatu sistem komunikasi dengan penggunaan frekwensi diatas 10 GHz akanmengalami redaman yang besar, karena butiran- butiran hujan menyebabkan terjadinya penghamburan gelombang radio (scatter) dan penyerapan (absorb) sepanjang lintasankomunikasi. Untuk dapat mengetahui proses dan besarnya gangguan gelombang elektromagnetik perlu diketahui kondisi hujan dan parameter-
parameter yang mempengaruhi redaman hujanseperti panjang lintasan gelombang, frekwensidan sudut elevasi yang digunakan karenasemakin tinggi intensitas hujannya dan semakintinggi frekwensi yang digunakan akan semakintinggi redamannya yang akan mengakibatkanmenurunnya link-availability-nya dan semakinrendah sudut elevasinya maka redamannyasemakin tinggi.
Gambar 1. Alat ukur Disdrometer Optic
Curah hujan adalah tingkat turun hujantepat pada waktu tertentu, biasanya dinyatakandalam mm/h. Dalam penelitian ini hujan dibagidalam 2 kelompok, yaitu hujan stratiform danconvective. Karakteristik hujan staratiform yaitucurah hujannya kurang dari 25 mm/h, durasinyalebih dari satu jam dan cakupan lokasinya luas.Sedangkan karakteristik hujan convectivememiliki curah hujan yang tinggi diatas 25mm/h, durasinya singkat (beberapa menit) biasanya disertai badai, dan cakupan lokasinyatertentu.[6]
Metode Pengukuran
Pengukuran curah hujan dilakukan didalam
lingkungan kampus ITS Surabaya menggunakandisdrometer dapat dilihat pada Gambar 1, yangdiletakkan diatas atap gedung Teknik Mesin dananalisa data dilakukan di LaboratoriumPerambatan Gelombang Elektromagnetik danRadiasi, Jurusan Teknik Elektro. Disdrometerdisetting menggunakan software Hydras yanghanya bisa mendeteksi curah hujan (mm/h)
dengan waktu sampling 60 detik dan softwareAsdo yang bisa mendeteksi curah hujan (mm/h)dan distribusi titik hujan (DSD) dengan waktusampling 10 detik.
Gambar 2. Sistem laser disdrometer optic
Disdrometer optic bekerja berdasarkansystem laser optic. Pengukuran dapat dilakukansecara real time, jika ada partikel-partikel hujanyang melewati balok laser maka disdrometerdapat mendeteksi curah hujan (mm/h) dandistribusi titik hujan (DSD) dapat dilihat padaGambar 2, kemudian hasilnya disimpan dalamsoftware yang disebut data parsivel.
Hasil
Pengukuran menggunakan software Hydras
dilakukan pada bulan desember 2006 sampai 17 januari 2007 sedangkan pengukuran
104
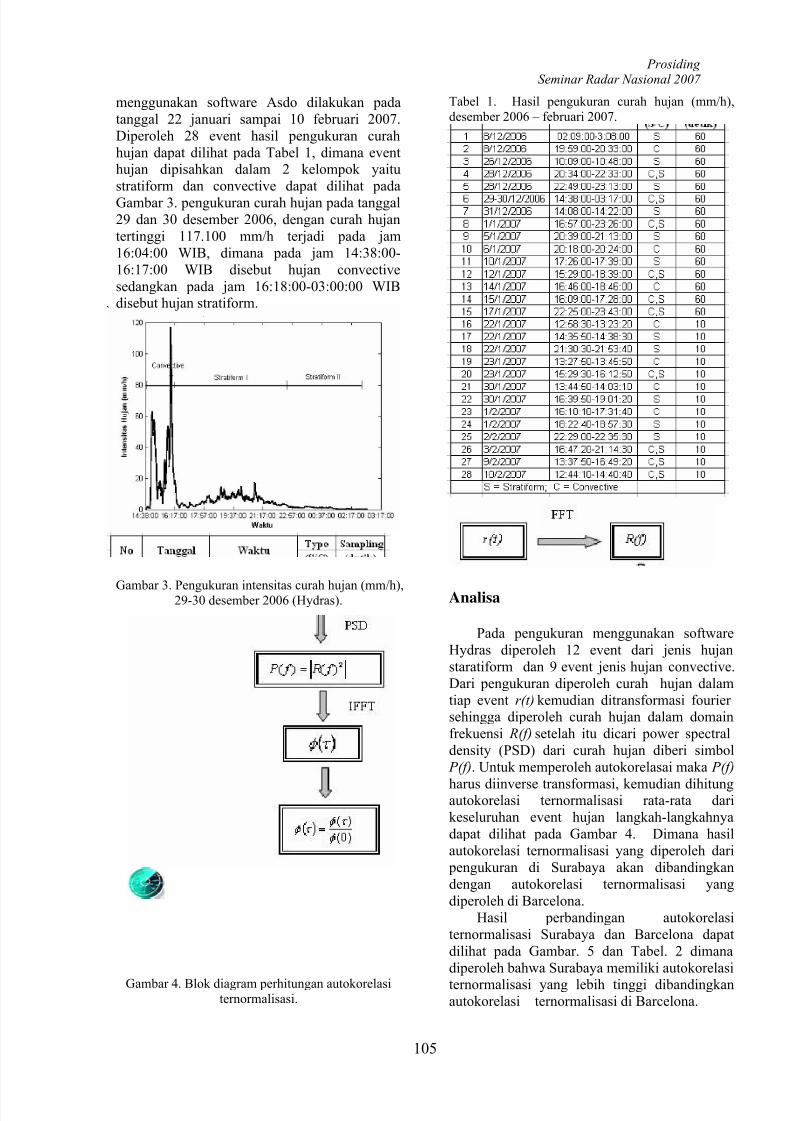
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 113/156
ProsidingSeminar Radar Nasional 2007
menggunakan software Asdo dilakukan padatanggal 22 januari sampai 10 februari 2007.Diperoleh 28 event hasil pengukuran curahhujan dapat dilihat pada Tabel 1, dimana eventhujan dipisahkan dalam 2 kelompok yaitustratiform dan convective dapat dilihat padaGambar 3. pengukuran curah hujan pada tanggal29 dan 30 desember 2006, dengan curah hujantertinggi 117.100 mm/h terjadi pada jam16:04:00 WIB, dimana pada jam 14:38:00-16:17:00 WIB disebut hujan convectivesedangkan pada jam 16:18:00-03:00:00 WIBdisebut hujan stratiform.
Gambar 3. Pengukuran intensitas curah hujan (mm/h),29-30 desember 2006 (Hydras).
Gambar 4. Blok diagram perhitungan autokorelasiternormalisasi.
Tabel 1. Hasil pengukuran curah hujan (mm/h),desember 2006 – februari 2007.
Analisa
Pada pengukuran menggunakan softwareHydras diperoleh 12 event dari jenis hujanstaratiform dan 9 event jenis hujan convective.Dari pengukuran diperoleh curah hujan dalamtiap event r(t) kemudian ditransformasi fouriersehingga diperoleh curah hujan dalam domainfrekuensi R(f) setelah itu dicari power spectraldensity (PSD) dari curah hujan diberi simbol
P(f). Untuk memperoleh autokorelasai maka P(f)
harus diinverse transformasi, kemudian dihitungautokorelasi ternormalisasi rata-rata darikeseluruhan event hujan langkah-langkahnyadapat dilihat pada Gambar 4. Dimana hasilautokorelasi ternormalisasi yang diperoleh dari pengukuran di Surabaya akan dibandingkandengan autokorelasi ternormalisasi yangdiperoleh di Barcelona.
Hasil perbandingan autokorelasiternormalisasi Surabaya dan Barcelona dapatdilihat pada Gambar. 5 dan Tabel. 2 dimanadiperoleh bahwa Surabaya memiliki autokorelasi
ternormalisasi yang lebih tinggi dibandingkanautokorelasi ternormalisasi di Barcelona.
105
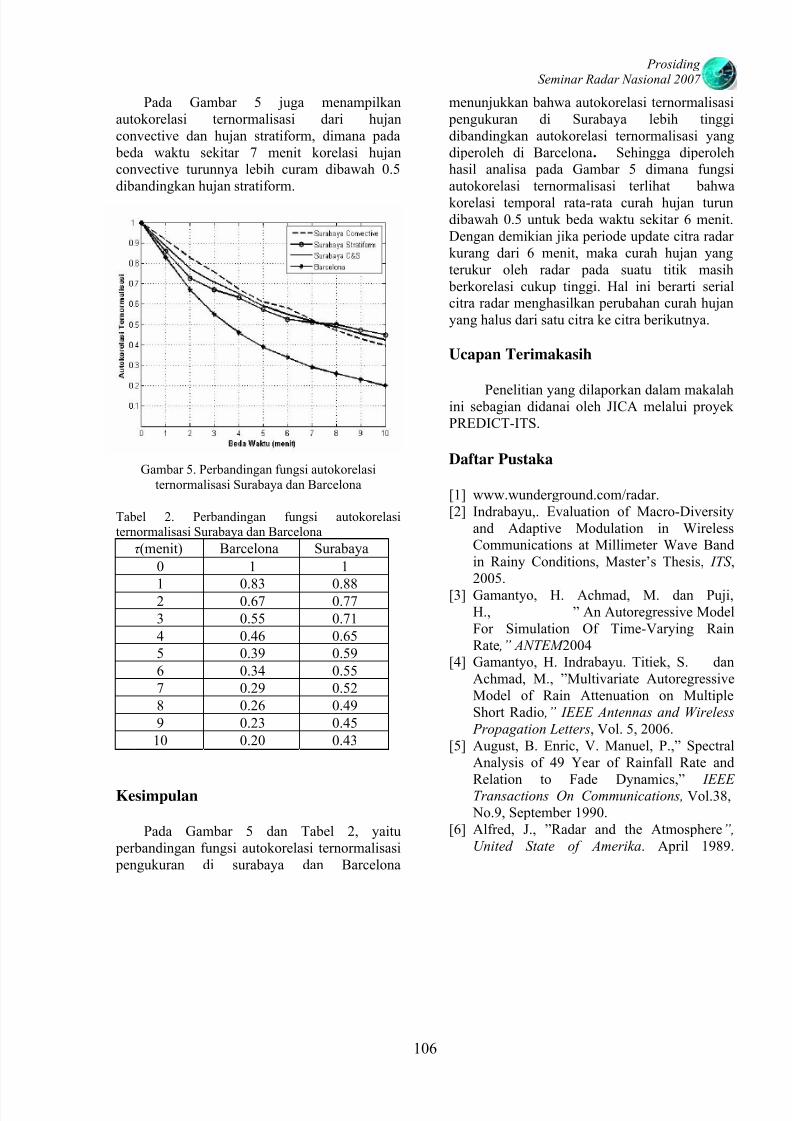
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 114/156
ProsidingSeminar Radar Nasional 2007
Pada Gambar 5 juga menampilkanautokorelasi ternormalisasi dari hujanconvective dan hujan stratiform, dimana pada beda waktu sekitar 7 menit korelasi hujanconvective turunnya lebih curam dibawah 0.5dibandingkan hujan stratiform.
Gambar 5. Perbandingan fungsi autokorelasiternormalisasi Surabaya dan Barcelona
Tabel 2. Perbandingan fungsi autokorelasiternormalisasi Surabaya dan Barcelona
τ (menit) Barcelona Surabaya
0 1 1
1 0.83 0.882 0.67 0.77
3 0.55 0.71
4 0.46 0.65
5 0.39 0.59
6 0.34 0.55
7 0.29 0.52
8 0.26 0.49
9 0.23 0.45
10 0.20 0.43
Kesimpulan
Pada Gambar 5 dan Tabel 2, yaitu perbandingan fungsi autokorelasi ternormalisasi pengukuran di surabaya dan Barcelona
menunjukkan bahwa autokorelasi ternormalisasi pengukuran di Surabaya lebih tinggidibandingkan autokorelasi ternormalisasi yangdiperoleh di Barcelona. Sehingga diperolehhasil analisa pada Gambar 5 dimana fungsiautokorelasi ternormalisasi terlihat bahwakorelasi temporal rata-rata curah hujan turundibawah 0.5 untuk beda waktu sekitar 6 menit.Dengan demikian jika periode update citra radarkurang dari 6 menit, maka curah hujan yangterukur oleh radar pada suatu titik masih berkorelasi cukup tinggi. Hal ini berarti serialcitra radar menghasilkan perubahan curah hujanyang halus dari satu citra ke citra berikutnya.
Ucapan Terimakasih
Penelitian yang dilaporkan dalam makalahini sebagian didanai oleh JICA melalui proyekPREDICT-ITS.
Daftar Pustaka
[1] www.wunderground.com/radar.[2] Indrabayu,. Evaluation of Macro-Diversity
and Adaptive Modulation in WirelessCommunications at Millimeter Wave Bandin Rainy Conditions, Master’s Thesis, ITS ,2005.
[3] Gamantyo, H. Achmad, M. dan Puji,H., ” An Autoregressive ModelFor Simulation Of Time-Varying RainRate ,” ANTEM 2004
[4] Gamantyo, H. Indrabayu. Titiek, S. danAchmad, M., ”Multivariate AutoregressiveModel of Rain Attenuation on MultipleShort Radio ,” IEEE Antennas and Wireless
Propagation Letters, Vol. 5, 2006.[5] August, B. Enric, V. Manuel, P.,” Spectral
Analysis of 49 Year of Rainfall Rate and
Relation to Fade Dynamics,” IEEETransactions On Communications, Vol.38, No.9, September 1990.
[6] Alfred, J., ”Radar and the Atmosphere”, United State of Amerika. April 1989.
106

8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 115/156
ProsidingSeminar Radar Nasional 2007
Analisa dan Simulasi Traffic Monitoring Kendaraan Bermotor
menggunakan Bistatic RADAR
Pamungkas Daud1 , R Nurmansyah Yarnaka2, Heroe Wijanto3 1Pusat Penelitian Elektronika dan Telekomunikasi Jl.Cisitu 21/154 D(Komplek LIPI Gd.20) 40135, Bandung ,
Phone : 022 2504660 Fax : 022 2504659 Email : [email protected] 2, 3Jurusan Teknik Elektro Sekolah Tinggi Teknologi Telkom, [email protected], [email protected]
Abstract
Bistatic radar is radar system that separates the location of the transmitter and the receiver at different places. This passive radar system operates with electromagnetic wave radiation, which is transmitted continually by the
transmitter; then those transmitted signals are reflected by objects and received by the receiver. Those reflected signals, which are received by the receiver, are signals that have changed in frequency, amplitude and phase as aresult of objects radial velocity and motion direction relative to the transmitter, and position of the objects relativeto transmitter and receiver as well. In the end, those alterations information is used for estimating the type, velocity,
and motion direction of objects.
Keywords : Bistatic radar, radar cross section, doppler frequency.
Abstrak
Bistatic radar adalah sistem radar yang memisahkan penempatan transmitter dan receiver di lokasi yang berbeda.Sistem radar pasif ini bekerja berdasarkan radiasi gelombang yang dipancarkan oleh transmitter secara kontinyu,
sinyal tersebut dipantulkan oleh objek dan diterima di receiver. Sinyal pantulan yang diterima di receiver adalah sinyal yang telah berubah frekuensi, amplitudo, dan fasanya akibat pengaruh dari kecepatan dan arah pergerakandari objek relatif terhadap transmitter, dan posisi dari objek relatif terhadap transmitter dan receiver. Informasi perubahan frekuensi, amplitudo, dan fasa ini digunakan untuk memperkiraan jenis, kecepatan, dan arah pergerakandari objek.
Kata kunci : Bistatic radar, radar cross section, frekuensi doppler.
1. Pendahuluan
1.1 Latar Belakang
• Tingkat mobilisasi masyarakat yangsemakin tinggi.
• Peningkatan daya beli masyarakat dan banyaknya kemudahan untuk kredit
kendaraan bermotor tanpa didukung dengan penambahan sarana transportasi yangmemadai, maka volume kendaraan bermotortiap hari semakin meningkat. Hal inimenyebabkan angka kemacetan semakinmeningkat.
• Berkembangnya industri seluler, maka pertumbuhan pengguna seluler pun semakin bertambah. Hal ini menyebabkan banyaknyasarana komunikasi seluler yang dapatdigunakan untuk keperluan traffic
monitoring . Sehingga biaya implementasi
bistatic radar akan jauh lebih murah.
• Akhir – akhir ini di Universitas Roke ManorInggris sedang diadakan penelitian tentangkemungkinan pengimplementasian sistembistatic radar pada sistem seluler yangdisebut CELLDAR, singkatan dari celluler
radar .
1.2 Perumusan Masalah• Mekanisme pengiriman dan penerimaansinyal.
• Pensimulasian sistem
1.3 Tujuan dan Kegunaan
• Memahami prinsip dasar sistem bistaticradar.
• Meneliti kemungkinan penerapan sistem bistatic radar pada sistem seluler digital.
1.4 Metoda Penelitian
• Studi literatur.
107
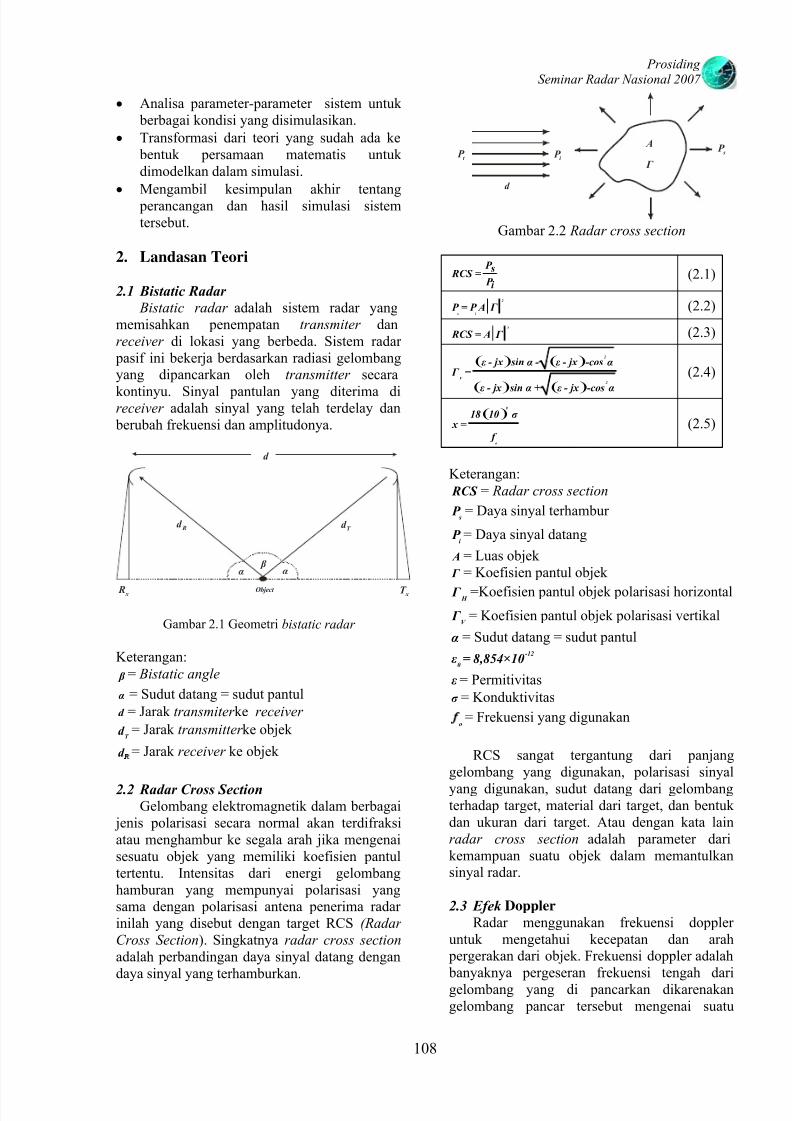
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 116/156
ProsidingSeminar Radar Nasional 2007
• Analisa parameter-parameter sistem untuk berbagai kondisi yang disimulasikan.
i P s P
A
Γ t
P
d
• Transformasi dari teori yang sudah ada ke bentuk persamaan matematis untukdimodelkan dalam simulasi.
• Mengambil kesimpulan akhir tentang perancangan dan hasil simulasi sistemtersebut.
2. Landasan Teori
2.1 Bistatic Radar
Bistatic radar adalah sistem radar yangmemisahkan penempatan transmiter dan
receiver di lokasi yang berbeda. Sistem radar pasif ini bekerja berdasarkan radiasi gelombangyang dipancarkan oleh transmitter secara
kontinyu. Sinyal pantulan yang diterima direceiver adalah sinyal yang telah terdelay dan berubah frekuensi dan amplitudonya.
d
Rd T d
x R x T Object
β α α
Gambar 2.1 Geometri bistatic radar
Keterangan:
β = Bistatic angle
α = Sudut datang = sudut pantul
d = Jarak transmiter ke receiver
T d = Jarak transmitter ke objek
d = Jarak receiver ke objek
2.2
Radar Cross SectionGelombang elektromagnetik dalam berbagai
jenis polarisasi secara normal akan terdifraksiatau menghambur ke segala arah jika mengenaisesuatu objek yang memiliki koefisien pantultertentu. Intensitas dari energi gelombanghamburan yang mempunyai polarisasi yangsama dengan polarisasi antena penerima radarinilah yang disebut dengan target RCS (Radar
Cross Section). Singkatnya radar cross section adalah perbandingan daya sinyal datang dengandaya sinyal yang terhamburkan.
Gambar 2.2 Radar cross section
P s RCS =
P i (2.1)
2
s i P = P A Γ (2.2)
2
RCS = A Γ (2.3)
( ) ( )
( ) ( )
2
V 2
ε - jx sin α - ε - jx -cos α Γ =
ε - jx sin α + ε - jx -cos α
(2.4)
( )9
o
18 10 σ x =
f
(2.5)
Keterangan: RCS = Radar cross section
s P = Daya sinyal terhambur
i P = Daya sinyal datang
A = Luas objek Γ = Koefisien pantul objek
H Γ =Koefisien pantul objek polarisasi horizontal
V Γ = Koefisien pantul objek polarisasi vertikal
α = Sudut datang = sudut pantul-12
0ε = 8,854×10
ε = Permitivitas
σ = Konduktivitas
o= Frekuensi yang digunakan
RCS sangat tergantung dari panjanggelombang yang digunakan, polarisasi sinyal
yang digunakan, sudut datang dari gelombangterhadap target, material dari target, dan bentukdan ukuran dari target. Atau dengan kata lain
radar cross section adalah parameter darikemampuan suatu objek dalam memantulkansinyal radar.
2.3 Efek Doppler
Radar menggunakan frekuensi doppleruntuk mengetahui kecepatan dan arah pergerakan dari objek. Frekuensi doppler adalah banyaknya pergeseran frekuensi tengah darigelombang yang di pancarkan dikarenakangelombang pancar tersebut mengenai suatu
108
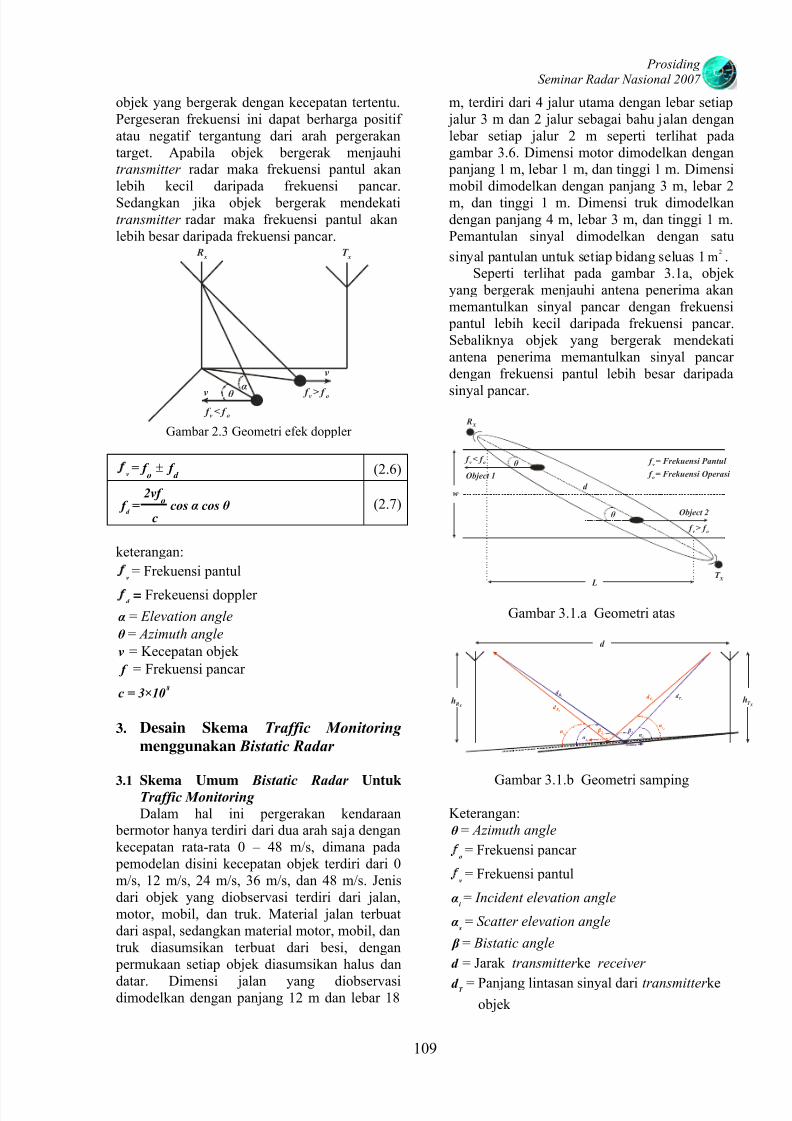
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 117/156
ProsidingSeminar Radar Nasional 2007
objek yang bergerak dengan kecepatan tertentu.Pergeseran frekuensi ini dapat berharga positifatau negatif tergantung dari arah pergerakantarget. Apabila objek bergerak menjauhitransmitter radar maka frekuensi pantul akanlebih kecil daripada frekuensi pancar.Sedangkan jika objek bergerak mendekatitransmitter radar maka frekuensi pantul akanlebih besar daripada frekuensi pancar.
x R
θ α
v o f > f
v o f < f
v
v
x T
Gambar 2.3 Geometri efek doppler
v o d = f f ± (2.6)
d
o2vf
f = cos α cos θ c
(2.7)
keterangan:
v= Frekuensi pantul
d = Frekeuensi doppler
α = Elevation angle
θ = Azimuth angle
v = Kecepatan objek
f = Frekuensi pancar8
c = 3×10
3. Desain Skema Traffic Monitoring
menggunakan Bistatic Radar
3.1 Skema Umum Bistatic Radar UntukTraffic Monitoring
Dalam hal ini pergerakan kendaraan bermotor hanya terdiri dari dua arah saja dengankecepatan rata-rata 0 – 48 m/s, dimana pada pemodelan disini kecepatan objek terdiri dari 0m/s, 12 m/s, 24 m/s, 36 m/s, dan 48 m/s. Jenisdari objek yang diobservasi terdiri dari jalan,motor, mobil, dan truk. Material jalan terbuatdari aspal, sedangkan material motor, mobil, dantruk diasumsikan terbuat dari besi, dengan permukaan setiap objek diasumsikan halus dan
datar. Dimensi jalan yang diobservasidimodelkan dengan panjang 12 m dan lebar 18
m, terdiri dari 4 jalur utama dengan lebar setiap jalur 3 m dan 2 jalur sebagai bahu jalan denganlebar setiap jalur 2 m seperti terlihat padagambar 3.6. Dimensi motor dimodelkan dengan panjang 1 m, lebar 1 m, dan tinggi 1 m. Dimensimobil dimodelkan dengan panjang 3 m, lebar 2m, dan tinggi 1 m. Dimensi truk dimodelkandengan panjang 4 m, lebar 3 m, dan tinggi 1 m.Pemantulan sinyal dimodelkan dengan satu
sinyal pantulan untuk setiap bidang seluas 1 .2
m
Seperti terlihat pada gambar 3.1a, objekyang bergerak menjauhi antena penerima akanmemantulkan sinyal pancar dengan frekuensi pantul lebih kecil daripada frekuensi pancar.Sebaliknya objek yang bergerak mendekatiantena penerima memantulkan sinyal pancardengan frekuensi pantul lebih besar daripada
sinyal pancar.
X T
X R
Object 1
Object 2
o f = Frekuensi Operasi
v f = Frekuensi Pantul
d
v o f < f
v o f > f
w
L
θ
θ
Gambar 3.1.a Geometri atas
d
X Rh X T h
1 β 2 β 2sα
2i α
2T d
2 Rd
1i α1sα
1T d 1 Rd
Gambar 3.1.b Geometri samping
Keterangan:θ = Azimuth angle
o= Frekuensi pancar
v= Frekuensi pantul
i α = Incident elevation angle
sα = Scatter elevation angle
β = Bistatic angle
d = Jarak transmitter ke receiver
T d = Panjang lintasan sinyal dari transmitter keobjek
109
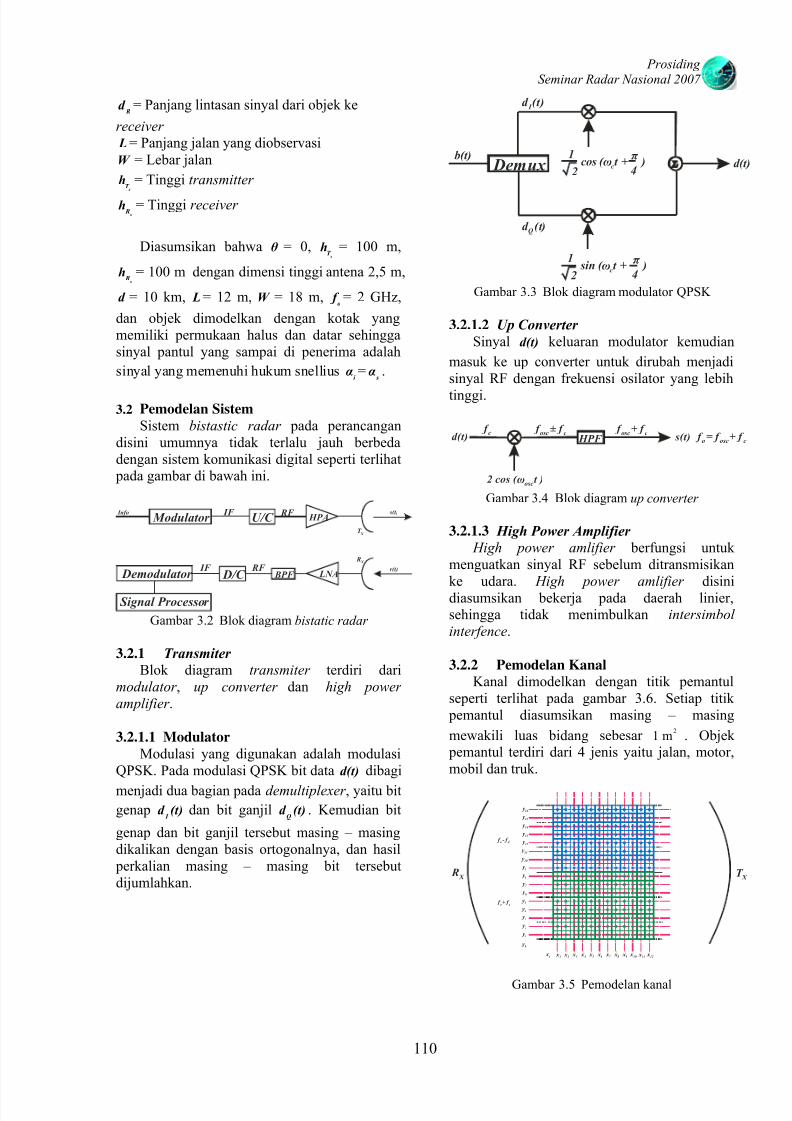
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 118/156
ProsidingSeminar Radar Nasional 2007
Demux b(t)
I d (t)
Qd (t)
d(t)c
1cos ( ω t + )
42
π
c
1sin ( ω t + )
42
π
Rd = Panjang lintasan sinyal dari objek ke
receiver L = Panjang jalan yang diobservasiW = Lebar jalan
x T
h = Tinggi transmitter
x R
h = Tinggi receiver
Diasumsikan bahwa θ = 0, = 100 m,
= 100 m dengan dimensi tinggi antena 2,5 m,
= 10 km, L = 12 m, W = 18 m, = 2 GHz,
dan objek dimodelkan dengan kotak yangmemiliki permukaan halus dan datar sehinggasinyal pantul yang sampai di penerima adalah
sinyal yang memenuhi hukum snellius = .
x T
h
x R
h
d o
f
i α
sα
3.2 Pemodelan Sistem
Sistem bistastic radar pada perancangandisini umumnya tidak terlalu jauh berbedadengan sistem komunikasi digital seperti terlihat pada gambar di bawah ini.
Modulator U/C HPA
LNA D/C Demodulator
Signal Processor
IF RF
RF IF
X T
X R
Info s(t)
r(t) BPF
Gambar 3.2 Blok diagram bistatic radar
3.2.1 Transmiter
Blok diagram transmiter terdiri darimodulator , up converter dan high power
amplifier .
3.2.1.1 Modulator
Modulasi yang digunakan adalah modulasiQPSK. Pada modulasi QPSK bit data dibagi
menjadi dua bagian pada demultiplexer , yaitu bit
genap dan bit ganjil . Kemudian bit
genap dan bit ganjil tersebut masing – masingdikalikan dengan basis ortogonalnya, dan hasil perkalian masing – masing bit tersebutdijumlahkan.
d(t)
I d (t)
Qd (t)
Gambar 3.3 Blok diagram modulator QPSK
3.2.1.2 Up Converter Sinyal keluaran modulator kemudian
masuk ke up converter untuk dirubah menjadisinyal RF dengan frekuensi osilator yang lebih
tinggi.
d(t)
HPF
osc2 cos ( ω t )
d(t) osc c
f ± f osc c
f + f s(t)
c f
o osc c f = f + f
Gambar 3.4 Blok diagram up converter
3.2.1.3 High Power Amplifier High power amlifier berfungsi untuk
menguatkan sinyal RF sebelum ditransmisikanke udara. High power amlifier disinidiasumsikan bekerja pada daerah linier,sehingga tidak menimbulkan intersimbol
interfence.
3.2.2 Pemodelan Kanal
Kanal dimodelkan dengan titik pemantulseperti terlihat pada gambar 3.6. Setiap titik pemantul diasumsikan masing – masing
mewakili luas bidang sebesar . Objek pemantul terdiri dari 4 jenis yaitu jalan, motor,mobil dan truk.
21 m
X R
X T
1 x 2 x 3 x 4 x 5 x 6 x 7 x 8 x 9 x 10 x 11 x 12 x
1 y
2 y
5 y
4 y
3 y
6 y
7 y
8 y
9 y
10 y
11 y
12 y
13 y
14 y
15 y
16 y
o d f + f
o d f - f
n x
k y
Gambar 3.5 Pemodelan kanal
110

8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 119/156
ProsidingSeminar Radar Nasional 2007
v
16
v k
k=1
r (t) = r (t)å (3.1)
vk k v k v k v k v
r (t) = y j (t) + y z (t) + y m (t) + y t (t) (3.2)
Keterangan:v
r (t) = Sinyal terima pada masing – masing
v = 0 m/s, 12 m/s, 24 m/s, 36 m/s, 48m/s,
pada masing –masing arah pergerakan
vk
r (t)= Sinyal terima pada masing – masing k,
1 k 16 ≤ ≤
3.2.2.1 Pemodelan Jalan
Daerah observasi jalan dimodelkan dengandimensi panjang 12 m dan lebar 16 m. Lebar
masing – masing jalur 3 m, dan 2 m untuk lebar bahu jalan.
T dj
T dj R
dj
Rdj
1 j (t)
12 j (t)
s(t)
100m
5000m
X Rj
X Rj
1 x
2 x
3 x
4 x
5 x
6 x
7 x
8 x
9 x
10 x
11 x 12
x
1α j 12
α j
x R 10 km x
T
Gambar 3.6 Pemodelan jalan
n
I c osc12
k v amp Rj
n=1
Q c osc
1 π d (t) cos(2π (
n
n
f + f )t + - ∆φ j )42
y j (t)= A
1 π +d (t) sin(2π (f + f )t + - ∆φ j )42
æ ö÷ç ÷ç ÷ç ÷ç ÷ç ÷ç ÷ç ÷÷ç ÷ç ÷çè ø
å (3.3)
Keterangan:
k v y j (t) =Sinyal yang di pantulkan oleh jalan,
1 n 12≤ ≤
nampRj
A = Amplituda terima sinyal yang di
pantulkan oleh jalan
n ∆φ j = Beda fasa sinyal yang di pantulkan oleh
jalan
3.2.2.2 Pemodelan MotorMotor dimodelkan dengan dimensi panjang1 m, lebar 1 m, dan tinggi 1 m.
1T dz
12T dz
1 Rdz
12 Rdz
1 z (t)
12 z (t)
s(t)
12α z 1
α z
1m
99m
1 x Rz
12 x Rz
5000m
1 2 3 4 5 6 7 8 9 10 11 12
1 x
2 x 3
x 4
x 5
x 6
x 7 x
8 x
9 x
10 x
11 x 12
x
x R 10 km x
T
Gambar 3.7 Pemodelan motor
n
n
n
I c osc d 12
k v amp Rz
n=1
Q c osc d
1 π d (t) cos(2π (f + f ± fz )t + - ∆φ z )
42 y z (t)= A
1 π +d (t) sin(2π (f + f ± fz )t + - ∆φ z )42
æn
n
ö÷ç ÷ç ÷ç ÷ç ÷ç ÷ç ÷ç ÷÷ç ÷ç ÷çè
å
ø
(3.4)
Keterangan:
k v y z (t) = Sinyal yang di pantulkan oleh motor,
1 n 12≤ ≤
nampRz
A = Amplituda terima sinyal yang di
pantulkan oleh motor
nd
fz = Frekuensi doppler motor
n ∆φ z = Beda fasa sinyal yang di pantulkan oleh
Motor
3.2.2.3 Pemodelan Mobil
Mobil dimodelkan dengan dimensi panjang3 m, lebar 2 m, dan tinggi 1 m.
1T dm
12T dm
1 Rdm
12 Rdm
1m (t)
12m (t)
s(t)
1m
99m1 x Rm
12 x Rm
5000m
mobil 1 mobil 2 mobil 3 mobil 4
1 x
2 x 3
x 4
x 5
x 6
x 7 x
8 x
9 x
10 x
11 x 12 x
nαm
nαm
x R 10 km x
T
Gambar 3.8 Pemodelan mobil
n
n
n
I c osc d 12
k v amp Rm
n=1
Q c osc d
1 π d (t) cos(2π (f + f ± fm )t + - ∆φm )
42 y m (t)= A
1 π +d (t) sin(2π (f + f ± fm )t + - ∆φm )
42
æ ön
n
÷ç ÷ç ÷ç ÷ç ÷ç ÷ç ÷ç ÷÷ç ÷ç ÷çè ø
å (3.5)
Keterangan:
k v y m (t)= Sinyal yang di pantulkan oleh mobil,
1 n 12≤ ≤
nampRm
A = Amplituda terima sinyal yang di
pantulkan oleh mobil
nd
fm = Frekuensi doppler mobil
n ∆φm = Beda fasa sinyal yang di pantulkan oleh
mobil
3.2.2.4 Pemodelan Truk
Truk dimodelkan dengan dimensi panjang 4m, lebar 3 m, dan tinggi 2 m.
T dt
T dt Rdt
Rdt
1t (t)
12t (t)
s(t)
αt αt
2m
98m x Rt
x Rt
5000m
1 x 2 x 3 x 4 x 5 x 6 x 7 x 8 x 9 x 10 x 11 x 12 x
truk 1 truk 2 truk 3
x R 10 km x T
Gambar 3.9 Pemodelan truk
n
n
n
I c osc d 12
k v amp Rt
n=1
Q c osc d
1 π d (t) cos(2π (
n
n
f + f ± ft )t + - ∆φt )42
y t (t)= A1 π
+d (t) sin(2π (f + f ± ft )t + - ∆φt )42
æ ö÷ç ÷ç ÷ç ÷ç ÷ç ÷ç ÷ç ÷÷ç ÷ç ÷çè ø
å (3.6)
Keterangan:
k v y t (t) = Sinyal yang di pantulkan oleh truk,
1 n 12≤ ≤
nampRt
A = Amplituda terima sinyal yang di
111
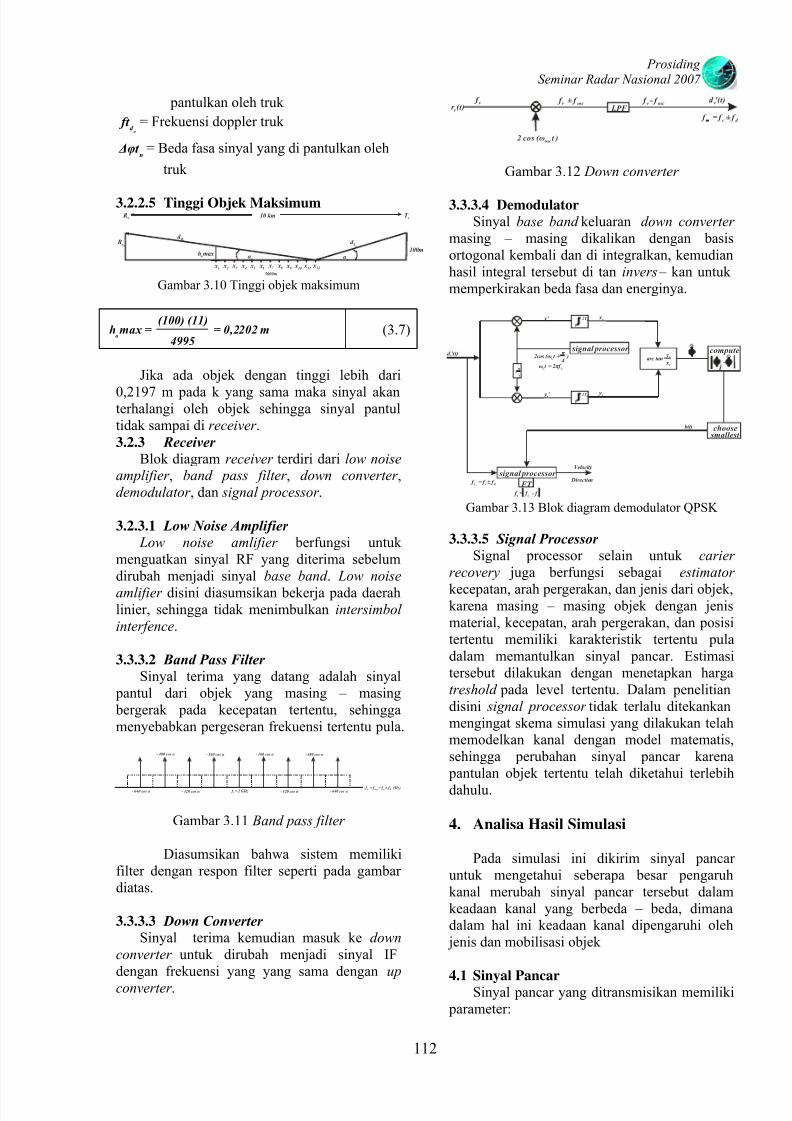
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 120/156
ProsidingSeminar Radar Nasional 2007
pantulkan oleh truk
nd
ft = Frekuensi doppler truk
n ∆φt = Beda fasa sinyal yang di pantulkan oleh
truk
osc2 cos ( ω t )
v osc f ± f v osc f - f LPF
vd '(t)
vr (t) v f
r c d f = f ± f
3.2.2.5 Tinggi Objek Maksimum
100m
x R 10 km
1 x 2 x 3 x 4 x 5 x 6 x 7 x 8 x
9 x 10 x 11 x 12 x
nT d n Rd
nα
n x R
x T
5000m
oh max n
α
Gambar 3.10 Tinggi objek maksimum
o
(100) (11)h max = = 0,2202 m
4995 (3.7)
Jika ada objek dengan tinggi lebih dari
0,2197 m pada k yang sama maka sinyal akanterhalangi oleh objek sehingga sinyal pantultidak sampai di receiver . 3.2.3 Receiver
Blok diagram receiver terdiri dari low noise
amplifier , band pass filter , down converter ,demodulator , dan signal processor .
3.2.3.1 Low Noise Amplifier
Low noise amlifier berfungsi untukmenguatkan sinyal RF yang diterima sebelumdirubah menjadi sinyal base band . Low noise
amlifier disini diasumsikan bekerja pada daerahlinier, sehingga tidak menimbulkan intersimbol
interfence.
3.3.3.2 Band Pass Filter
Sinyal terima yang datang adalah sinyal pantul dari objek yang masing – masing bergerak pada kecepatan tertentu, sehinggamenyebabkan pergeseran frekuensi tertentu pula.
v f = 2 GHz v osc c d f = f + f ± f (Hz)
160 cos α+
320 cos α+
480 cos α+
640 cos α+
- 160 cos α
- 320 cos α
- 480 cos α
- 640 cos α
Gambar 3.11 Band pass filter
Diasumsikan bahwa sistem memilikifilter dengan respon filter seperti pada gambardiatas.
3.3.3.3 Down Converter
Sinyal terima kemudian masuk ke down
converter untuk dirubah menjadi sinyal IFdengan frekuensi yang yang sama dengan up
converter .
Gambar 3.12 Down converter
3.3.3.4 Demodulator
Sinyal base band keluaran down converter masing – masing dikalikan dengan basisortogonal kembali dan di integralkan, kemudianhasil integral tersebut di tan invers – kan untukmemperkirakan beda fasa dan energinya.
0
0
v
v
yarc tan
x
compute
-
i
choosesmallest
v x
v y
b(t)
B2T
B2T
π-
2
vr
π 2cos ( ω t + )
4
v vr r ω t = 2π f
signal processor Direction
Velocity
vd '(t)
vd r c f = f - f
FT vr c d f = f ± f
v x'
v y '
signal processor
Gambar 3.13 Blok diagram demodulator QPSK
3.3.3.5 Signal Processor
Signal processor selain untuk carier
recovery juga berfungsi sebagai estimator
kecepatan, arah pergerakan, dan jenis dari objek,karena masing – masing objek dengan jenismaterial, kecepatan, arah pergerakan, dan posisitertentu memiliki karakteristik tertentu puladalam memantulkan sinyal pancar. Estimasitersebut dilakukan dengan menetapkan hargatreshold pada level tertentu. Dalam penelitiandisini signal processor tidak terlalu ditekankanmengingat skema simulasi yang dilakukan telahmemodelkan kanal dengan model matematis,sehingga perubahan sinyal pancar karena pantulan objek tertentu telah diketahui terlebih
dahulu.
4. Analisa Hasil Simulasi
Pada simulasi ini dikirim sinyal pancaruntuk mengetahui seberapa besar pengaruhkanal merubah sinyal pancar tersebut dalamkeadaan kanal yang berbeda – beda, dimanadalam hal ini keadaan kanal dipengaruhi oleh jenis dan mobilisasi objek
4.1 Sinyal PancarSinyal pancar yang ditransmisikan memiliki parameter:
112
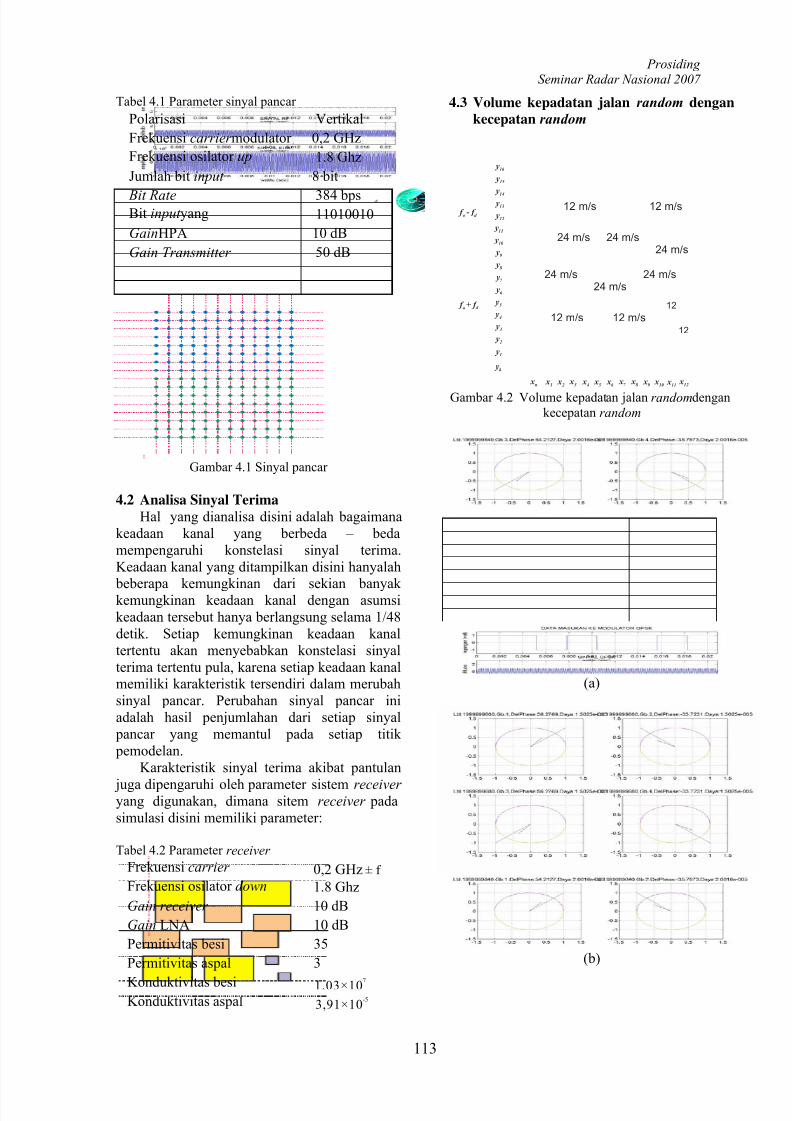
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 121/156
ProsidingSeminar Radar Nasional 2007
Tabel 4.1 Parameter sinyal pancar
Polarisasi Vertikal
Frekuensi carrier modulator 0,2 GHz
Frekuensi osilator up 1.8 Ghz
Jumlah bit input 8 bit
Bit Rate 384 bpsBit input yang 11010010
Gain HPA 10 dB
Gain Transmitter 50 dB
Gambar 4.1 Sinyal pancar
4.2 Analisa Sinyal Terima
Hal yang dianalisa disini adalah bagaimanakeadaan kanal yang berbeda – bedamempengaruhi konstelasi sinyal terima.Keadaan kanal yang ditampilkan disini hanyalah
beberapa kemungkinan dari sekian banyakkemungkinan keadaan kanal dengan asumsikeadaan tersebut hanya berlangsung selama 1/48detik. Setiap kemungkinan keadaan kanaltertentu akan menyebabkan konstelasi sinyalterima tertentu pula, karena setiap keadaan kanalmemiliki karakteristik tersendiri dalam merubahsinyal pancar. Perubahan sinyal pancar iniadalah hasil penjumlahan dari setiap sinyal pancar yang memantul pada setiap titik pemodelan.
Karakteristik sinyal terima akibat pantulan
juga dipengaruhi oleh parameter sistem receiveryang digunakan, dimana sitem receiver padasimulasi disini memiliki parameter:
Tabel 4.2 Parameter receiver
Frekuensi carrier 0,2 GHz ± f
Frekuensi osilator down 1.8 Ghz
Gain receiver 10 dB
Gain LNA 10 dB
Permitivitas besi 35
Permitivitas aspal 3
Konduktivitas besi 71,03×10Konduktivitas aspal -5
3,91×10
4.3 Volume kepadatan jalan random dengan
kecepatan random
12 m/s 12 m/s
24 m/s24 m/s
24 m/s
12
12
24 m/s24 m/s24 m/s
12 m/s12 m/s
o d f + f
o d f - f
1 x
2 x 3
x 4
x 5
x 6
x 7 x
8 x
9 x
10 x
11 x 12
x
1 y
2 y
5 y
4 y
3 y
6 y
7 y
8 y
9 y
10 y
11 y
12 y
13 y14
y
15 y
16 y
n x
k y
Gambar 4.2 Volume kepadatan jalan random dengan
kecepatan random
(a)
(b)
113
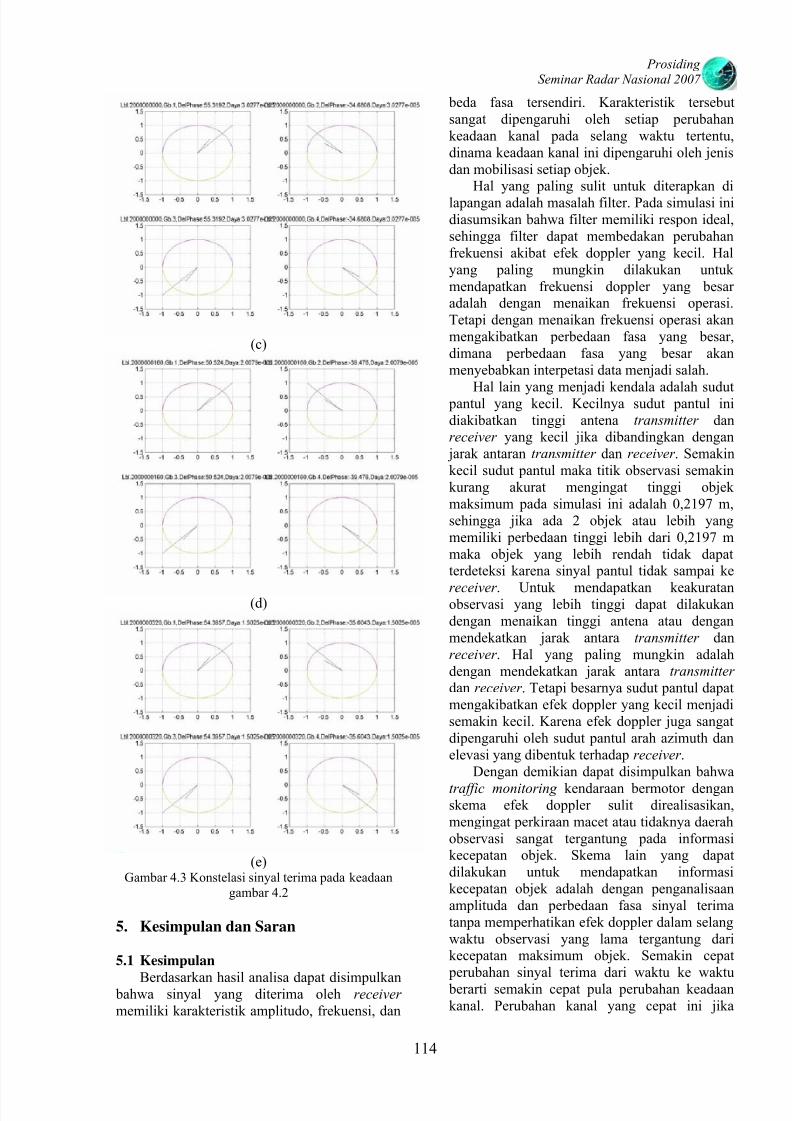
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 122/156
ProsidingSeminar Radar Nasional 2007
(c)
(d)
(e)Gambar 4.3 Konstelasi sinyal terima pada keadaan
gambar 4.2
5. Kesimpulan dan Saran
5.1 Kesimpulan
Berdasarkan hasil analisa dapat disimpulkan bahwa sinyal yang diterima oleh receiver memiliki karakteristik amplitudo, frekuensi, dan
beda fasa tersendiri. Karakteristik tersebutsangat dipengaruhi oleh setiap perubahankeadaan kanal pada selang waktu tertentu,dinama keadaan kanal ini dipengaruhi oleh jenisdan mobilisasi setiap objek.
Hal yang paling sulit untuk diterapkan dilapangan adalah masalah filter. Pada simulasi inidiasumsikan bahwa filter memiliki respon ideal,sehingga filter dapat membedakan perubahanfrekuensi akibat efek doppler yang kecil. Halyang paling mungkin dilakukan untukmendapatkan frekuensi doppler yang besaradalah dengan menaikan frekuensi operasi.Tetapi dengan menaikan frekuensi operasi akanmengakibatkan perbedaan fasa yang besar,dimana perbedaan fasa yang besar akanmenyebabkan interpetasi data menjadi salah.
Hal lain yang menjadi kendala adalah sudut pantul yang kecil. Kecilnya sudut pantul inidiakibatkan tinggi antena transmitter danreceiver yang kecil jika dibandingkan dengan jarak antaran transmitter dan receiver . Semakinkecil sudut pantul maka titik observasi semakinkurang akurat mengingat tinggi objekmaksimum pada simulasi ini adalah 0,2197 m,sehingga jika ada 2 objek atau lebih yangmemiliki perbedaan tinggi lebih dari 0,2197 mmaka objek yang lebih rendah tidak dapatterdeteksi karena sinyal pantul tidak sampai ke
receiver . Untuk mendapatkan keakuratanobservasi yang lebih tinggi dapat dilakukandengan menaikan tinggi antena atau denganmendekatkan jarak antara transmitter danreceiver . Hal yang paling mungkin adalahdengan mendekatkan jarak antara transmitter
dan receiver . Tetapi besarnya sudut pantul dapatmengakibatkan efek doppler yang kecil menjadisemakin kecil. Karena efek doppler juga sangatdipengaruhi oleh sudut pantul arah azimuth danelevasi yang dibentuk terhadap receiver .
Dengan demikian dapat disimpulkan bahwa
traffic monitoring kendaraan bermotor denganskema efek doppler sulit direalisasikan,mengingat perkiraan macet atau tidaknya daerahobservasi sangat tergantung pada informasikecepatan objek. Skema lain yang dapatdilakukan untuk mendapatkan informasikecepatan objek adalah dengan penganalisaanamplituda dan perbedaan fasa sinyal terimatanpa memperhatikan efek doppler dalam selangwaktu observasi yang lama tergantung darikecepatan maksimum objek. Semakin cepat perubahan sinyal terima dari waktu ke waktu berarti semakin cepat pula perubahan keadaankanal. Perubahan kanal yang cepat ini jika
114
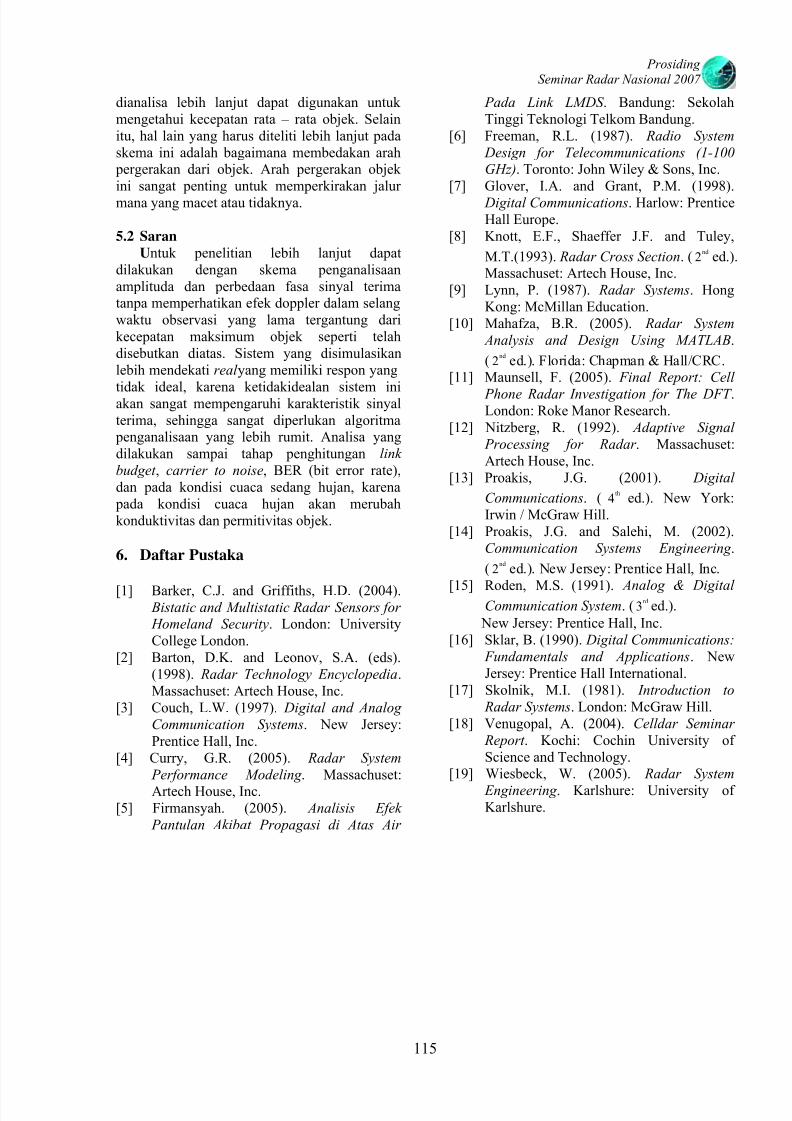
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 123/156

8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 124/156
ProsidingSeminar Radar Nasional 2007
Fasilitas Pengujian Antena GPR di ITB
E. Bharata1,3, A.A. Lestari1,2, A.B. Suksmono1,3, T.P. Soetikno4, D. Yulian5, Liarto5,
A.G. Yarovoy2, dan L.P. Ligthart1,2 1International Research Centre for Telecom and Radar – Indonesian Branch (IRCTR-IB) – ITB, Indonesia
2International Research Centre for Telecom and Radar (IRCTR) – TU Delft, The Netherlands3Institut Teknologi Bandung (ITB), Indonesia
4Innovative Design Engineering (IDE), Indonesia5Radar & Communication Systems (RCS), Indonesia
Abstract
This paper describes the GPR antenna test facility developed by IRCTR-IB at ITB. Facility consists of a
GPR test range, a PC-controlled scanner, a UWB sensor, and measuring equipment. Test range was constructed asa wooden sandbox of 3 m x 3 m x 1.6 m and filled with dry sand with relative permittivity of 5.1. The scanner isused for accurate antenna positioning above the sand and fully controlled from a PC. A control software hasbeen developed to allow automatic data acquisition and antenna positioning, important for measurements ofantenna footprints. The measuring equipment consists of a vector network analyzer, a sampling converter, and pulse generators to allow accurate measurements in frequency as well as time domain.
Keywords: Antenna measurement, GPR antenna, GPR test range.
Abstrak
Makalah ini menguraikan fasilitas pengujian antena GPR yang dibangun oleh IRCTR-IB di ITB. Fasilitastersebut terdiri atas test range GPR, scanner, sensor UWB, dan peralatan pengukuran. Test range berupa kotakberukuran 3 m x 3 m x 1.6 m terbuat dari bahan kayu dan berisi pasir kering dengan permitivitas relative 5.1.Scanner yang dikendalikan oleh PC digunakan untuk menempatkan secara akurat antena yang diukur tepat di atas permukaan pasir. Perangkat lunak pengendali dibuat untuk melakukan akuisisi data dan penempatan antena secara otomatis, terutama untuk pengukuran antena footprint. Peralatan pengukuran yang terdiri atas vector
network analyzer, sampling converter, dan pulse generator diperlukan untuk melakukan pengukuran di domain frekuensi maupun di domain waktu.
Kata kunci: Pengukuran antena, antena GPR, test range GPR.
1. Pendahuluan
Tidak seperti pada antena konvensional,antena GPR pada umumnya dioperasikan dekatdan diarahkan ke permukaan tanah. Oleh karenaitu untuk menganalisis antena GPR secarakomprehensif dibutuhkan fasilitas pengujiankhusus yang secara prinsip berbeda dari yangdibutuhkan oleh antena konvensional. Fasilitastersebut terdiri atas:(a) Test range yang terdiri atas sebidang tanah
atau pasir yang homogen untukmenganalisis antena yang ditempatkandekat permukaannya.
(b) Platform yang dirancang khusus untukantena yang akan diukur.
(c) Peralatan pengukuran yang sesuai.Dengan menggunakan fasilitas seperti di atas,karakteristik antena GPR yang ditempatkan
dekat dengan permukaan tanah dapat dianalisissecara akurat dan tepat. Faktor-faktor penting
untuk dianalisis antara lain adalah footprintantena, pengaruh tanah terhadap impedansimasukan antena, dan bentuk gelombang pancarsubsurface. Footprint antena GPR memberikan bentuk dan ukuran pada permukaan tanah yangdisinari oleh antena, sehingga menunjukkanresolusi cross-range antena, yang penting untukmengoptimasi kinerja GPR [1]. Selain itu telahdiketahui secara luas bahwa jika antenaditempatkan dekat ke permukaan tanah,impedansi masukannya berubah secara tajamdengan perubahan elevasi [2]. Karenaimpedansi masukan antena yang stabilmerupakan faktor kunci dalam menentukan performansi GPR, maka penting untukmelakukan karakterisasi impedansi masukanantena sebagai fungsi dari elevasinya di atas permukaan tanah. Dengan fasilitas pengujianantena di atas dapat dilakukan karakterisasi
tersebut terhadap antena GPR.
116
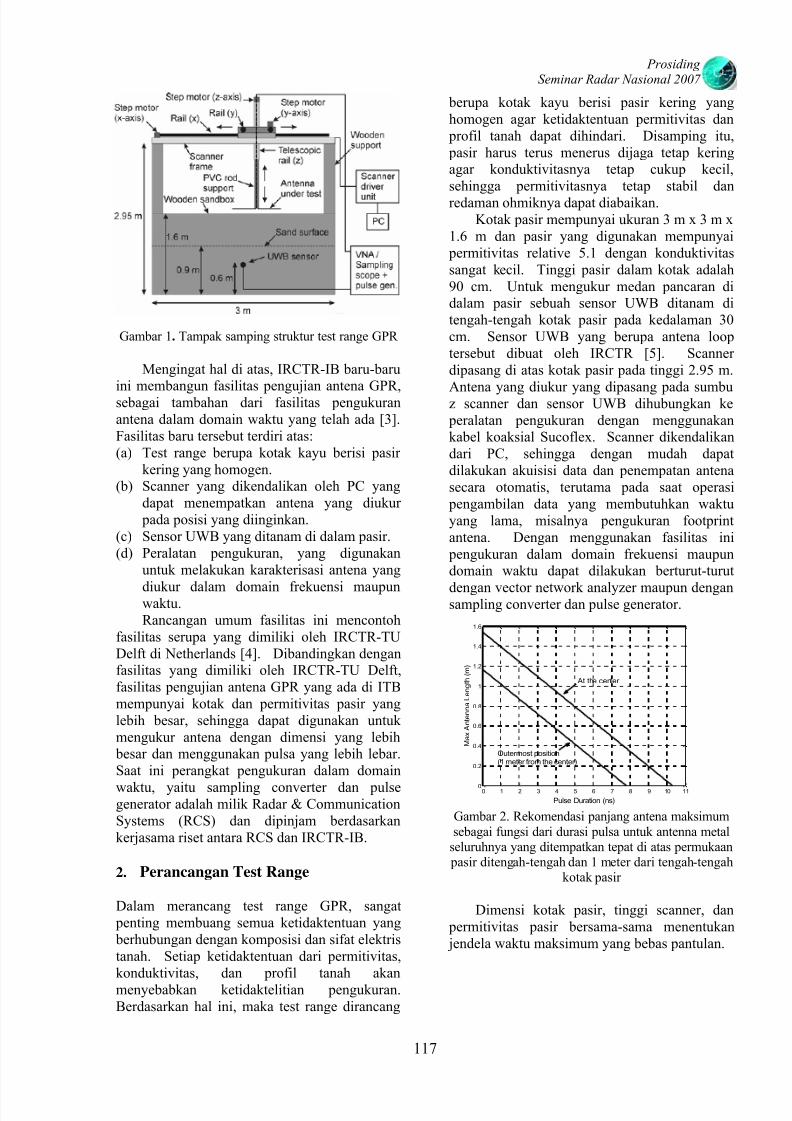
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 125/156
ProsidingSeminar Radar Nasional 2007
Gambar 1. Tampak samping struktur test range GPR
Mengingat hal di atas, IRCTR-IB baru-baru
ini membangun fasilitas pengujian antena GPR,sebagai tambahan dari fasilitas pengukuranantena dalam domain waktu yang telah ada [3].Fasilitas baru tersebut terdiri atas:(a) Test range berupa kotak kayu berisi pasir
kering yang homogen.(b) Scanner yang dikendalikan oleh PC yang
dapat menempatkan antena yang diukur pada posisi yang diinginkan.
(c) Sensor UWB yang ditanam di dalam pasir.(d) Peralatan pengukuran, yang digunakan
untuk melakukan karakterisasi antena yang
diukur dalam domain frekuensi maupunwaktu.Rancangan umum fasilitas ini mencontoh
fasilitas serupa yang dimiliki oleh IRCTR-TUDelft di Netherlands [4]. Dibandingkan denganfasilitas yang dimiliki oleh IRCTR-TU Delft,fasilitas pengujian antena GPR yang ada di ITBmempunyai kotak dan permitivitas pasir yanglebih besar, sehingga dapat digunakan untukmengukur antena dengan dimensi yang lebih besar dan menggunakan pulsa yang lebih lebar.Saat ini perangkat pengukuran dalam domain
waktu, yaitu sampling converter dan pulsegenerator adalah milik Radar & CommunicationSystems (RCS) dan dipinjam berdasarkankerjasama riset antara RCS dan IRCTR-IB.
2. Perancangan Test Range
Dalam merancang test range GPR, sangat penting membuang semua ketidaktentuan yang berhubungan dengan komposisi dan sifat elektristanah. Setiap ketidaktentuan dari permitivitas,konduktivitas, dan profil tanah akanmenyebabkan ketidaktelitian pengukuran.Berdasarkan hal ini, maka test range dirancang
berupa kotak kayu berisi pasir kering yanghomogen agar ketidaktentuan permitivitas dan profil tanah dapat dihindari. Disamping itu, pasir harus terus menerus dijaga tetap keringagar konduktivitasnya tetap cukup kecil,sehingga permitivitasnya tetap stabil danredaman ohmiknya dapat diabaikan.
Kotak pasir mempunyai ukuran 3 m x 3 m x1.6 m dan pasir yang digunakan mempunyai permitivitas relative 5.1 dengan konduktivitassangat kecil. Tinggi pasir dalam kotak adalah90 cm. Untuk mengukur medan pancaran didalam pasir sebuah sensor UWB ditanam ditengah-tengah kotak pasir pada kedalaman 30cm. Sensor UWB yang berupa antena looptersebut dibuat oleh IRCTR [5]. Scannerdipasang di atas kotak pasir pada tinggi 2.95 m.
Antena yang diukur yang dipasang pada sumbuz scanner dan sensor UWB dihubungkan ke peralatan pengukuran dengan menggunakankabel koaksial Sucoflex. Scanner dikendalikandari PC, sehingga dengan mudah dapatdilakukan akuisisi data dan penempatan antenasecara otomatis, terutama pada saat operasi pengambilan data yang membutuhkan waktuyang lama, misalnya pengukuran footprintantena. Dengan menggunakan fasilitas ini pengukuran dalam domain frekuensi maupundomain waktu dapat dilakukan berturut-turut
dengan vector network analyzer maupun dengansampling converter dan pulse generator.
0 1 2 3 4 5 6 7 8 9 10 110
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Pulse Duration (ns)
M a x A n t e n n a L e n g t h ( m )
At the center
Outermost position(1 meter from the center)
Gambar 2. Rekomendasi panjang antena maksimumsebagai fungsi dari durasi pulsa untuk antenna metal
seluruhnya yang ditempatkan tepat di atas permukaan pasir ditengah-tengah dan 1 meter dari tengah-tengah
kotak pasir
Dimensi kotak pasir, tinggi scanner, dan permitivitas pasir bersama-sama menentukan jendela waktu maksimum yang bebas pantulan.
117
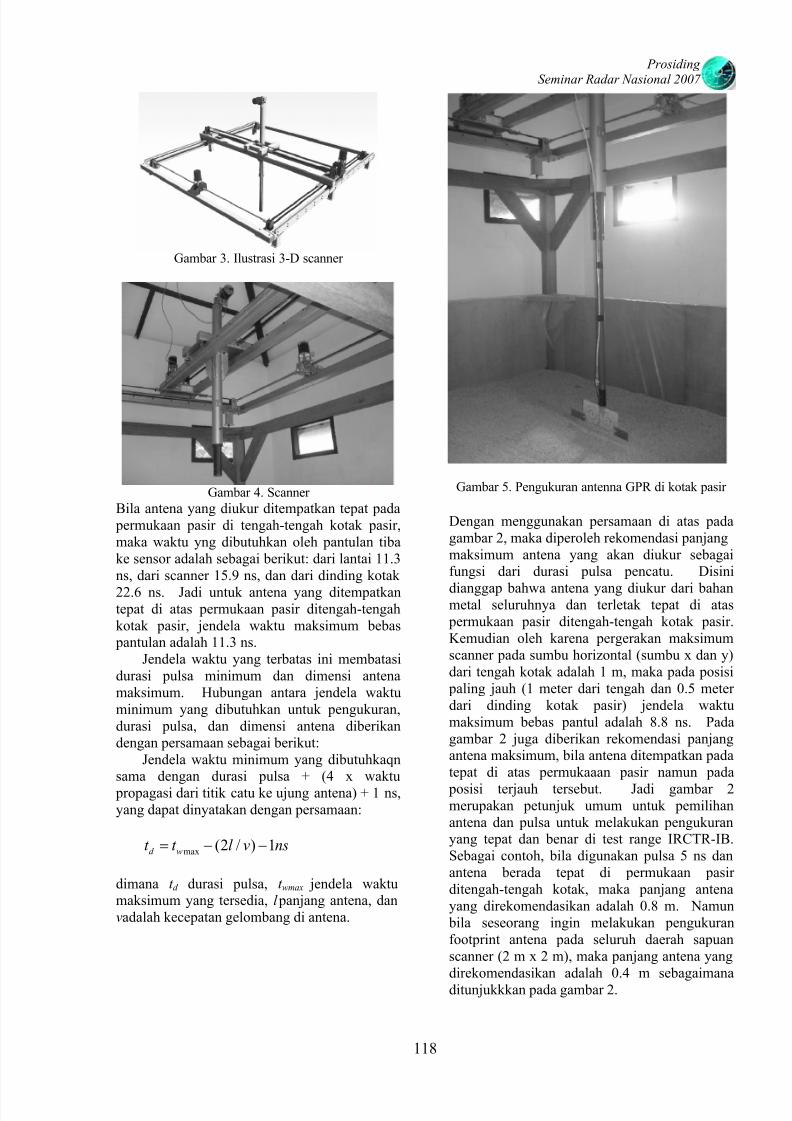
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 126/156
ProsidingSeminar Radar Nasional 2007
Gambar 3. Ilustrasi 3-D scanner
Gambar 4. Scanner
Bila antena yang diukur ditempatkan tepat pada permukaan pasir di tengah-tengah kotak pasir,maka waktu yng dibutuhkan oleh pantulan tibake sensor adalah sebagai berikut: dari lantai 11.3ns, dari scanner 15.9 ns, dan dari dinding kotak
22.6 ns. Jadi untuk antena yang ditempatkantepat di atas permukaan pasir ditengah-tengahkotak pasir, jendela waktu maksimum bebas pantulan adalah 11.3 ns.
Jendela waktu yang terbatas ini membatasidurasi pulsa minimum dan dimensi antenamaksimum. Hubungan antara jendela waktuminimum yang dibutuhkan untuk pengukuran,durasi pulsa, dan dimensi antena diberikandengan persamaan sebagai berikut:
Jendela waktu minimum yang dibutuhkaqnsama dengan durasi pulsa + (4 x waktu propagasi dari titik catu ke ujung antena) + 1 ns,yang dapat dinyatakan dengan persamaan:
max (2 / ) 1d w
t t l v n= − − s
dimana t d durasi pulsa, t wmax jendela waktumaksimum yang tersedia, l panjang antena, danv adalah kecepatan gelombang di antena.
Gambar 5. Pengukuran antenna GPR di kotak pasir
Dengan menggunakan persamaan di atas padagambar 2, maka diperoleh rekomendasi panjangmaksimum antena yang akan diukur sebagaifungsi dari durasi pulsa pencatu. Disini
dianggap bahwa antena yang diukur dari bahanmetal seluruhnya dan terletak tepat di atas permukaan pasir ditengah-tengah kotak pasir.Kemudian oleh karena pergerakan maksimumscanner pada sumbu horizontal (sumbu x dan y)dari tengah kotak adalah 1 m, maka pada posisi paling jauh (1 meter dari tengah dan 0.5 meterdari dinding kotak pasir) jendela waktumaksimum bebas pantul adalah 8.8 ns. Padagambar 2 juga diberikan rekomendasi panjangantena maksimum, bila antena ditempatkan padatepat di atas permukaaan pasir namun pada
posisi terjauh tersebut. Jadi gambar 2merupakan petunjuk umum untuk pemilihanantena dan pulsa untuk melakukan pengukuranyang tepat dan benar di test range IRCTR-IB.Sebagai contoh, bila digunakan pulsa 5 ns danantena berada tepat di permukaan pasirditengah-tengah kotak, maka panjang antenayang direkomendasikan adalah 0.8 m. Namun bila seseorang ingin melakukan pengukuranfootprint antena pada seluruh daerah sapuanscanner (2 m x 2 m), maka panjang antena yangdirekomendasikan adalah 0.4 m sebagaimanaditunjukkkan pada gambar 2.
118
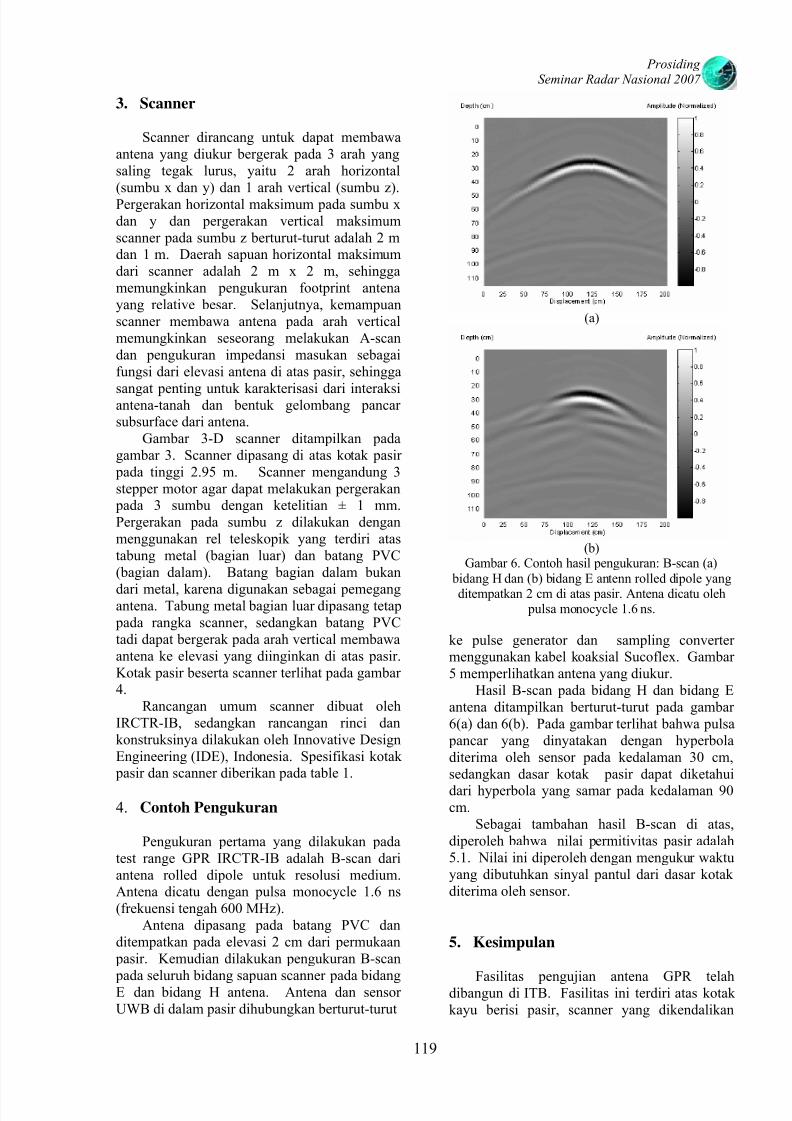
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 127/156
ProsidingSeminar Radar Nasional 2007
3. Scanner
Scanner dirancang untuk dapat membawaantena yang diukur bergerak pada 3 arah yangsaling tegak lurus, yaitu 2 arah horizontal(sumbu x dan y) dan 1 arah vertical (sumbu z).Pergerakan horizontal maksimum pada sumbu xdan y dan pergerakan vertical maksimumscanner pada sumbu z berturut-turut adalah 2 mdan 1 m. Daerah sapuan horizontal maksimumdari scanner adalah 2 m x 2 m, sehinggamemungkinkan pengukuran footprint antenayang relative besar. Selanjutnya, kemampuanscanner membawa antena pada arah verticalmemungkinkan seseorang melakukan A-scandan pengukuran impedansi masukan sebagaifungsi dari elevasi antena di atas pasir, sehingga
sangat penting untuk karakterisasi dari interaksiantena-tanah dan bentuk gelombang pancarsubsurface dari antena.
Gambar 3-D scanner ditampilkan padagambar 3. Scanner dipasang di atas kotak pasir pada tinggi 2.95 m. Scanner mengandung 3stepper motor agar dapat melakukan pergerakan pada 3 sumbu dengan ketelitian ± 1 mm.Pergerakan pada sumbu z dilakukan denganmenggunakan rel teleskopik yang terdiri atastabung metal (bagian luar) dan batang PVC(bagian dalam). Batang bagian dalam bukan
dari metal, karena digunakan sebagai pemegangantena. Tabung metal bagian luar dipasang tetap pada rangka scanner, sedangkan batang PVCtadi dapat bergerak pada arah vertical membawaantena ke elevasi yang diinginkan di atas pasir.Kotak pasir beserta scanner terlihat pada gambar4.
Rancangan umum scanner dibuat olehIRCTR-IB, sedangkan rancangan rinci dankonstruksinya dilakukan oleh Innovative DesignEngineering (IDE), Indonesia. Spesifikasi kotak pasir dan scanner diberikan pada table 1.
4. Contoh Pengukuran
Pengukuran pertama yang dilakukan padatest range GPR IRCTR-IB adalah B-scan dariantena rolled dipole untuk resolusi medium.Antena dicatu dengan pulsa monocycle 1.6 ns(frekuensi tengah 600 MHz).
Antena dipasang pada batang PVC danditempatkan pada elevasi 2 cm dari permukaan pasir. Kemudian dilakukan pengukuran B-scan
pada seluruh bidang sapuan scanner pada bidangE dan bidang H antena. Antena dan sensorUWB di dalam pasir dihubungkan berturut-turut
(a)
(b)Gambar 6. Contoh hasil pengukuran: B-scan (a)
bidang H dan (b) bidang E antenn rolled dipole yang
ditempatkan 2 cm di atas pasir. Antena dicatu oleh pulsa monocycle 1.6 ns.
ke pulse generator dan sampling convertermenggunakan kabel koaksial Sucoflex. Gambar5 memperlihatkan antena yang diukur.
Hasil B-scan pada bidang H dan bidang Eantena ditampilkan berturut-turut pada gambar6(a) dan 6(b). Pada gambar terlihat bahwa pulsa pancar yang dinyatakan dengan hyperboladiterima oleh sensor pada kedalaman 30 cm,sedangkan dasar kotak pasir dapat diketahui
dari hyperbola yang samar pada kedalaman 90cm.
Sebagai tambahan hasil B-scan di atas,diperoleh bahwa nilai permitivitas pasir adalah5.1. Nilai ini diperoleh dengan mengukur waktuyang dibutuhkan sinyal pantul dari dasar kotakditerima oleh sensor.
5. Kesimpulan
Fasilitas pengujian antena GPR telahdibangun di ITB. Fasilitas ini terdiri atas kotakkayu berisi pasir, scanner yang dikendalikan
119
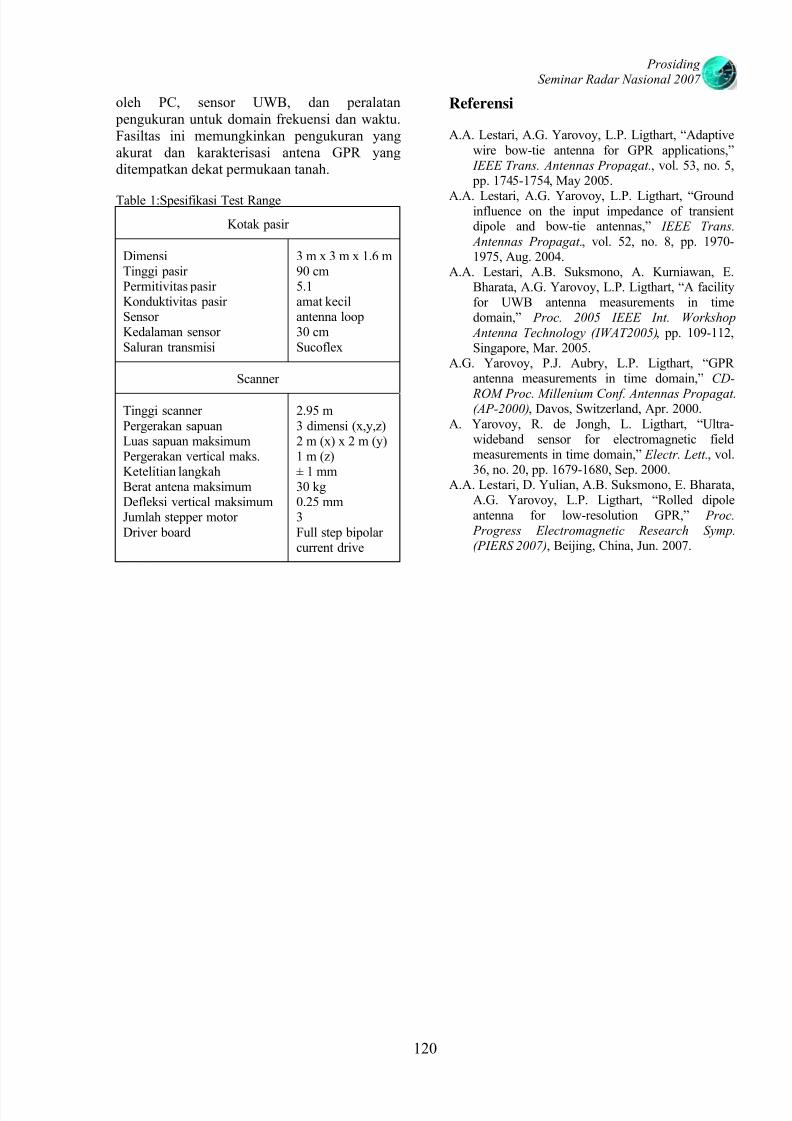
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 128/156
ProsidingSeminar Radar Nasional 2007
oleh PC, sensor UWB, dan peralatan pengukuran untuk domain frekuensi dan waktu.Fasiltas ini memungkinkan pengukuran yangakurat dan karakterisasi antena GPR yangditempatkan dekat permukaan tanah.
Table 1:Spesifikasi Test Range
Kotak pasir
DimensiTinggi pasirPermitivitas pasirKonduktivitas pasirSensorKedalaman sensorSaluran transmisi
3 m x 3 m x 1.6 m90 cm5.1amat kecilantenna loop30 cmSucoflex
Scanner
Tinggi scannerPergerakan sapuanLuas sapuan maksimumPergerakan vertical maks.Ketelitian langkahBerat antena maksimumDefleksi vertical maksimumJumlah stepper motorDriver board
2.95 m3 dimensi (x,y,z)2 m (x) x 2 m (y)1 m (z)± 1 mm30 kg0.25 mm3Full step bipolarcurrent drive
Referensi
A.A. Lestari, A.G. Yarovoy, L.P. Ligthart, “Adaptivewire bow-tie antenna for GPR applications,” IEEE Trans. Antennas Propagat., vol. 53, no. 5, pp. 1745-1754, May 2005.
A.A. Lestari, A.G. Yarovoy, L.P. Ligthart, “Groundinfluence on the input impedance of transientdipole and bow-tie antennas,” IEEE Trans.
Antennas Propagat., vol. 52, no. 8, pp. 1970-1975, Aug. 2004.
A.A. Lestari, A.B. Suksmono, A. Kurniawan, E.Bharata, A.G. Yarovoy, L.P. Ligthart, “A facilityfor UWB antenna measurements in timedomain,” Proc. 2005 IEEE Int. Workshop
Antenna Technology (IWAT2005), pp. 109-112,Singapore, Mar. 2005.
A.G. Yarovoy, P.J. Aubry, L.P. Ligthart, “GPRantenna measurements in time domain,” CD-
ROM Proc. Millenium Conf. Antennas Propagat.(AP-2000), Davos, Switzerland, Apr. 2000.
A. Yarovoy, R. de Jongh, L. Ligthart, “Ultra-wideband sensor for electromagnetic fieldmeasurements in time domain,” Electr. Lett., vol.36, no. 20, pp. 1679-1680, Sep. 2000.
A.A. Lestari, D. Yulian, A.B. Suksmono, E. Bharata,A.G. Yarovoy, L.P. Ligthart, “Rolled dipoleantenna for low-resolution GPR,” Proc. Progress Electromagnetic Research Symp.(PIERS 2007), Beijing, China, Jun. 2007.
120

8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 129/156
ProsidingSeminar Radar Nasional 2007
Perancangan dan Implementasi Antena Monopole 1GHz
untuk Aplikasi Borehole GPR
Nana Rachmana, M.Nuramzan Iftari, Andriyan B SuksmonoTelecommunication Research Group, School of Electrical and Informatics Engineering, ITB
Jl. Ganesha No.10 Bandung 40132 Indonesia
Abstraks
Pada paper ini dibahas mengenai simulasi dan implementasi perancangan antena monopole dengan frekuensi1GHz yang dapat dipergunakan untuk keperluan Ground Penetrating Radar (GPR) dengan teknik Borehole. Antenamonopole ini cukup sederhana dan mudah dibuat dengan akurasi yang cukup baik dengan implementasi dan
pengukurannya menunjukan hasil yang sama dengan hasil simulasinya. Antena yang dibuat dicoba digunakandalam simulasi borehole GPR dengan GPRMAX 2D/3D, dengan hasil simulasi menunjukkan sistem dapat
mendeteksi suatu benda berbentuk bola yang tersimpan didalam pasir dengan cukup presisi.
1. Pendahuluan
Antena monopole adalah antenna yangsangat popular dan sering digunakan. Antena inidapat digunakan untuk aplikasi broadcasting,radio mobil, layanan komunikasi bergerak jalurdarat, dan yang terbaru untuk telepon seluler.Antenna monopole vertical diatas tanah secaraluas digunakan untuk siaran radio AM denganrentang frekuensi dari 535-1605 KHz[4].
Antenna monopole memiliki pola radiasiomnidirectional sehingga antenna ini juga dapatdigunakan untuk mendeteksi adanya objekdibawah tanah dengan teknik borehole. Denganmeningkatnya frekuensi antenna akanmenurunkan tinggi dari antenna tersebutsekaligus akan meningkatkan redaman sinyal propagasi karena adanya efek skin[3]. Biladitinjau dari segi ekonomis dan mobilitas, tinggiantenna minimum adalah yang lebih baik. Makadari itu diperlukan pengembangan- pengembangan terbaru dalam teknologi radaruntuk membuat antenna dengan tinggi minimumserta besar efek skin yang memadai agar sinyal
elektromagnetik antena dapat menembus suatumedium tertentu dan berhasil ditangkap olehantena penerima.
Teori Antena Monopole
Antena monopole merupakan antenadengan tinggi ¼ panjang gelombang dan lebar pita yang relatif besar hingga 10%[6]. Antenamonopole biasanya dicatu dari kabel koaksialmenuju ground plane dan tidak memerlukan balun transformer. Bagaimanapun, performansi
antena monopole
dipengaruhi oleh ukuran ground plane yang
secara ideal harus lebih luas. Dibandingkandengan antenadipole, antena monopole memiliki besarimpedansi ½ dari impedansi antena dipole yaitusebesar (36.5+j21.3)ohm[1]. Adapun ketebalandari antenna monopole mempunyai efek yangsangat kecil terhadap besar impedansi input.
Pada umumnya, besar nilai konduktivitasground plane dari antena monopole sangat tinggisehingga penetrasi sinyal elektromagnetik (EM)kedalam ground plane dapat diabaikan. Akibatdari ground plane ini semua radiasi diarahkan ke bagian lengan atas sehingga besar rapat daya
untuk tiap sudut menjadi dua kali lebih besar
daripada antena dipole yang memancarkan dayadengan sama besar.
Adapun medan jauh antena monopole
dengan tinggi adalah
Dimana medan listrik (Eθ ) berada pada bidangelevasi ,dan medan magnet (H ) berada pada bidang azimuth . Pada gambar diatas terdapat
beberapa parameter antenna yaitu = sudut
elevasi, = sudut azimuth, r = jarak radial titik
sumber menuju titik observasi, k = =
konstanta gelombang EM, adalah panjang
gelombang, Io adalah arus maksimum, =
impedansi intrinsik. Rapat daya dan intensitas
Jakarta, 18 – 19 April 2007 121
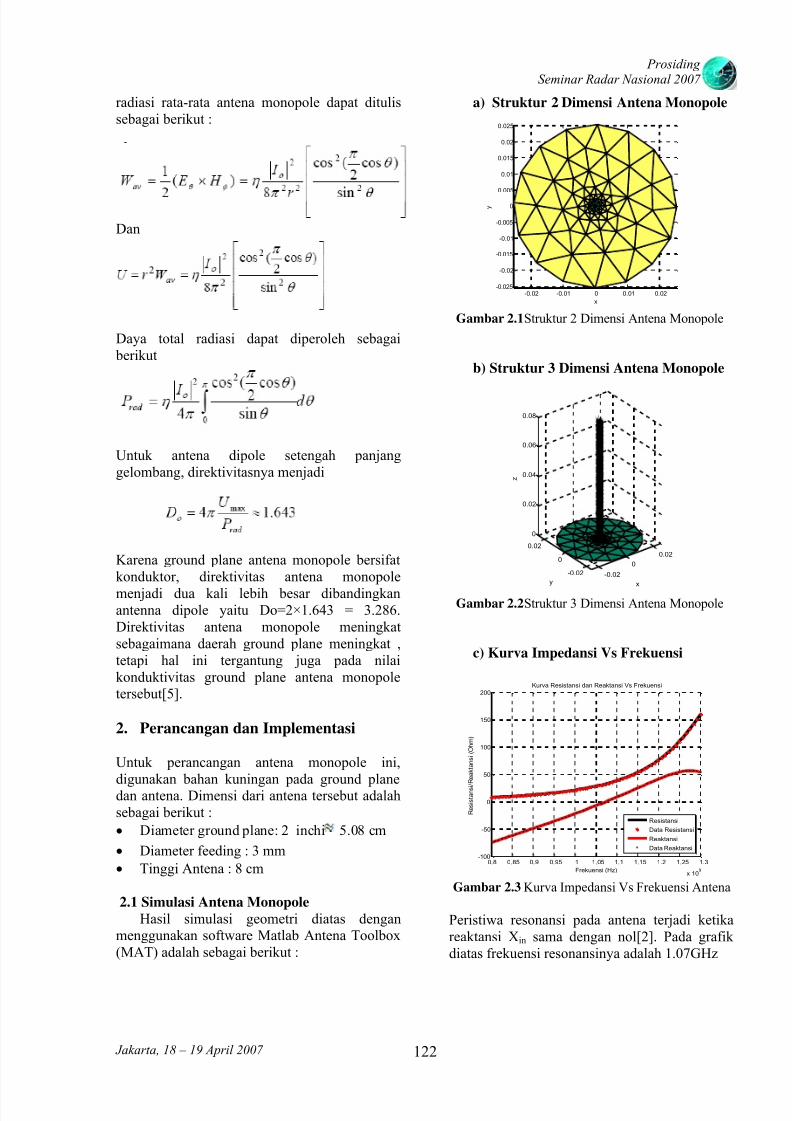
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 130/156
ProsidingSeminar Radar Nasional 2007
radiasi rata-rata antena monopole dapat ditulissebagai berikut :
Dan
Daya total radiasi dapat diperoleh sebagai berikut
Untuk antena dipole setengah panjanggelombang, direktivitasnya menjadi
Karena ground plane antena monopole bersifatkonduktor, direktivitas antena monopole
menjadi dua kali lebih besar dibandingkanantenna dipole yaitu Do=2×1.643 = 3.286.Direktivitas antena monopole meningkatsebagaimana daerah ground plane meningkat ,tetapi hal ini tergantung juga pada nilaikonduktivitas ground plane antena monopoletersebut[5].
2. Perancangan dan Implementasi
Untuk perancangan antena monopole ini,
digunakan bahan kuningan pada ground planedan antena. Dimensi dari antena tersebut adalahsebagai berikut :
• Diameter ground plane: 2 inchi 5.08 cm
• Diameter feeding : 3 mm
• Tinggi Antena : 8 cm
2.1 Simulasi Antena Monopole
Hasil simulasi geometri diatas denganmenggunakan software Matlab Antena Toolbox(MAT) adalah sebagai berikut :
a) Struktur 2 Dimensi Antena Monopole
-0.02 -0.01 0 0.01 0.02-0.025
-0.02
-0.015
-0.01
-0.005
0
0.005
0.01
0.015
0.02
0.025
x
y
Gambar 2.1 Struktur 2 Dimensi Antena Monopole
b) Struktur 3 Dimensi Antena Monopole
-0.02
0
0.02
-0.02
0
0.02
0
0.02
0.04
0.06
0.08
xy
z
Gambar 2.2 Struktur 3 Dimensi Antena Monopole
c) Kurva Impedansi Vs Frekuensi
0.8 0.85 0.9 0.95 1 1.05 1.1 1.15 1.2 1.25 1.3
x 109
-100
-50
0
50
100
150
200
Frekuensi (Hz)
R e s i s t a n s i / R e a k t a n s i ( O h m )
Kurva Resistansi dan Reaktansi Vs Frekuensi
Resistansi
Data Resistansi
Reaktansi
Data Reaktansi
Gambar 2.3 Kurva Impedansi Vs Frekuensi Antena
Peristiwa resonansi pada antena terjadi ketika
reaktansi Xin sama dengan nol[2]. Pada grafik
diatas frekuensi resonansinya adalah 1.07GHz
Jakarta, 18 – 19 April 2007 122
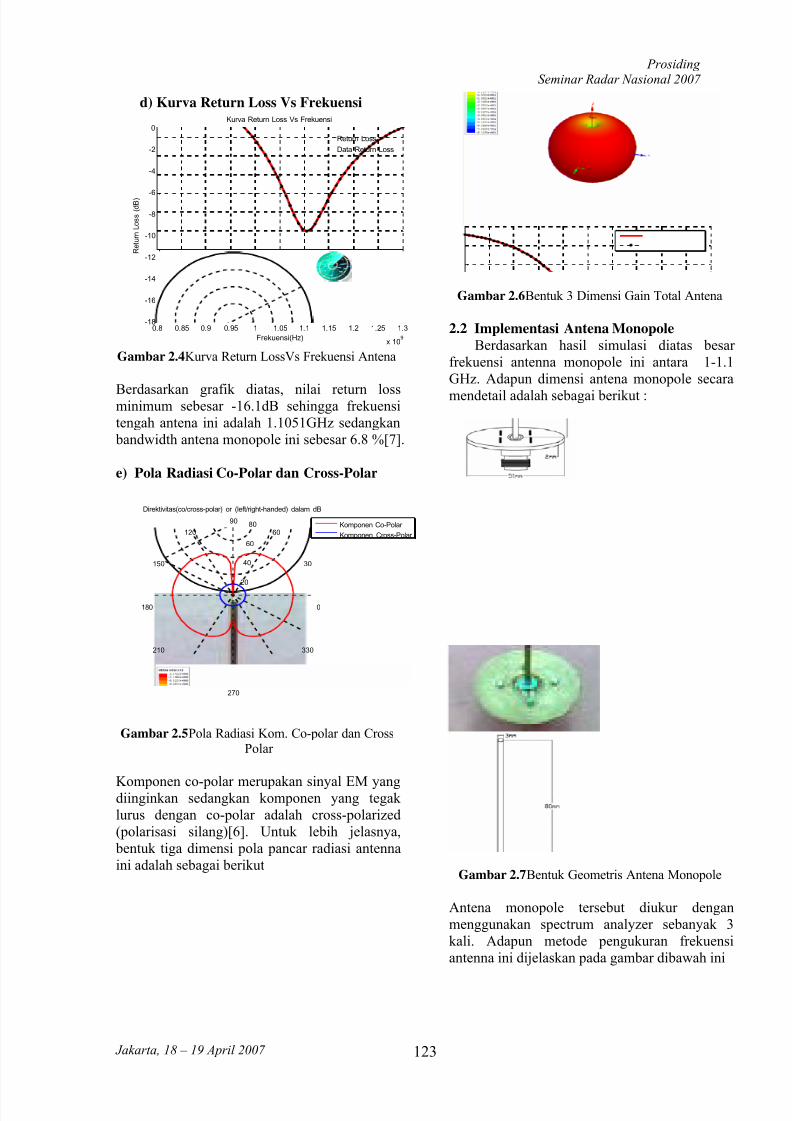
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 131/156
ProsidingSeminar Radar Nasional 2007
d) Kurva Return Loss Vs Frekuensi
0.8 0.85 0.9 0.95 1 1.05 1.1 1.15 1.2 1.25 1.3
x 109
-18
-16
-14
-12
-10
-8
-6
-4
-2
0
Frekuensi(Hz)
R e t u r n L o s s ( d B )
Kurva Return Loss Vs Frekuensi
Return Loss
Data Return Loss
Gambar 2.4 Kurva Return LossVs Frekuensi Antena
Berdasarkan grafik diatas, nilai return lossminimum sebesar -16.1dB sehingga frekuensitengah antena ini adalah 1.1051GHz sedangkan bandwidth antena monopole ini sebesar 6.8 %[7].
e) Pola Radiasi Co-Polar dan Cross-Polar
20
40
60
80
30
210
60
240
90
270
120
300
150
330
180 0
Direktivitas(co/cross-polar) or (left/right-handed) dalam dB
Komponen Co-Polar
Komponen Cross-Polar
Gambar 2.5 Pola Radiasi Kom. Co-polar dan Cross
Polar
Komponen co-polar merupakan sinyal EM yangdiinginkan sedangkan komponen yang tegaklurus dengan co-polar adalah cross-polarized(polarisasi silang)[6]. Untuk lebih jelasnya, bentuk tiga dimensi pola pancar radiasi antennaini adalah sebagai berikut
Gambar 2.6 Bentuk 3 Dimensi Gain Total Antena
2.2 Implementasi Antena Monopole
Berdasarkan hasil simulasi diatas besarfrekuensi antenna monopole ini antara 1-1.1GHz. Adapun dimensi antena monopole secara
mendetail adalah sebagai berikut :
Gambar 2.7 Bentuk Geometris Antena Monopole
Antena monopole tersebut diukur denganmenggunakan spectrum analyzer sebanyak 3kali. Adapun metode pengukuran frekuensiantenna ini dijelaskan pada gambar dibawah ini
Jakarta, 18 – 19 April 2007 123
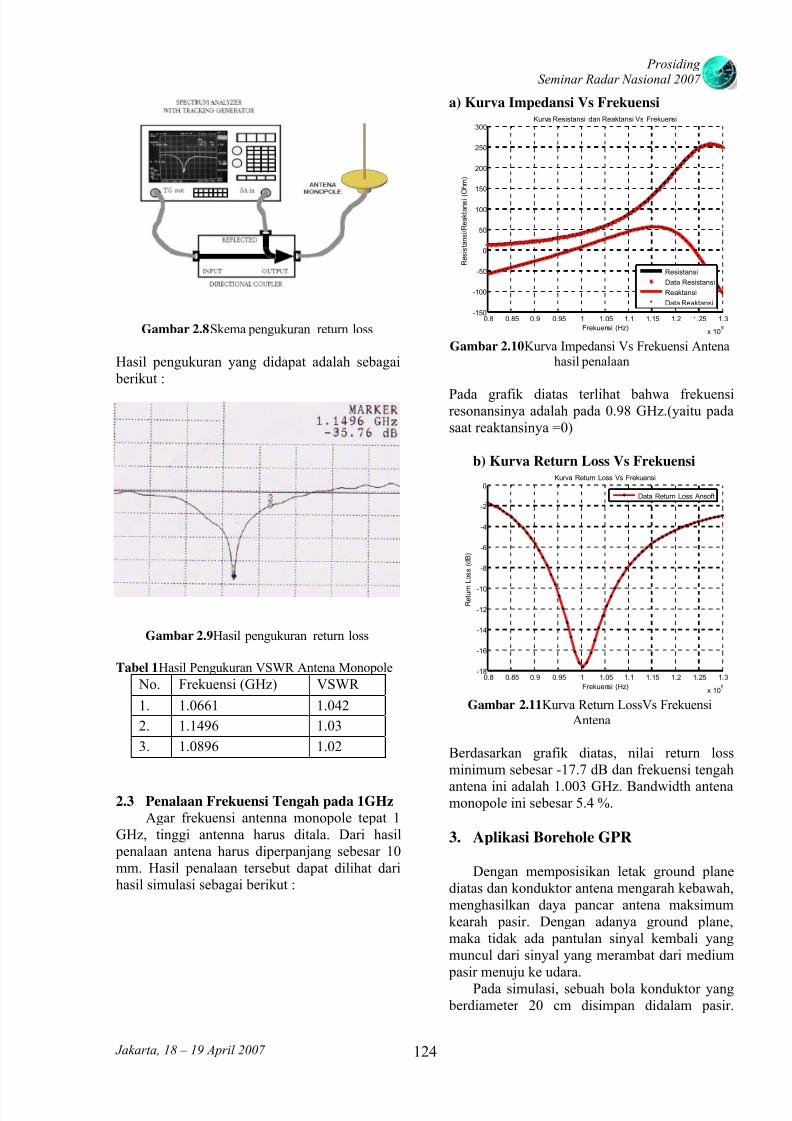
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 132/156
ProsidingSeminar Radar Nasional 2007
Gambar 2.8 Skema pengukuran return loss
Hasil pengukuran yang didapat adalah sebagai berikut :
Gambar 2.9 Hasil pengukuran return loss
Tabel 1 Hasil Pengukuran VSWR Antena Monopole
No. Frekuensi (GHz) VSWR
1. 1.0661 1.042
2. 1.1496 1.03
3. 1.0896 1.02
2.3 Penalaan Frekuensi Tengah pada 1GHz
Agar frekuensi antenna monopole tepat 1GHz, tinggi antenna harus ditala. Dari hasil penalaan antena harus diperpanjang sebesar 10mm. Hasil penalaan tersebut dapat dilihat darihasil simulasi sebagai berikut :
a) Kurva Impedansi Vs Frekuensi
0.8 0.85 0.9 0.95 1 1.05 1.1 1.15 1.2 1.25 1.3
x 109
-150
-100
-50
0
50
100
150
200
250
300
Frekuensi (Hz)
R e s i s t a n s i / R e a k t a n s i (
O h m )
Kurva Resistansi dan Reaktansi Vs Frekuensi
Resistansi
Data Resistansi
Reaktansi
Data Reaktansi
Gambar 2.10 Kurva Impedansi Vs Frekuensi Antena
hasil penalaan
Pada grafik diatas terlihat bahwa frekuensiresonansinya adalah pada 0.98 GHz.(yaitu padasaat reaktansinya =0)
b) Kurva Return Loss Vs Frekuensi
0.8 0.85 0.9 0.95 1 1.05 1.1 1.15 1.2 1.25 1.3
x 109
-18
-16
-14
-12
-10
-8
-6
-4
-2
0
Frekuensi (Hz)
R e t u r n
L o s s ( d B )
Kurva Return Loss Vs Frekuensi
Data Return Loss Ansoft
Gambar 2.11 Kurva Return LossVs Frekuensi
Antena
Berdasarkan grafik diatas, nilai return lossminimum sebesar -17.7 dB dan frekuensi tengah
antena ini adalah 1.003 GHz. Bandwidth antenamonopole ini sebesar 5.4 %.
3. Aplikasi Borehole GPR
Dengan memposisikan letak ground planediatas dan konduktor antena mengarah kebawah,menghasilkan daya pancar antena maksimumkearah pasir. Dengan adanya ground plane,maka tidak ada pantulan sinyal kembali yangmuncul dari sinyal yang merambat dari medium pasir menuju ke udara.
Pada simulasi, sebuah bola konduktor yang berdiameter 20 cm disimpan didalam pasir.
Jakarta, 18 – 19 April 2007 124
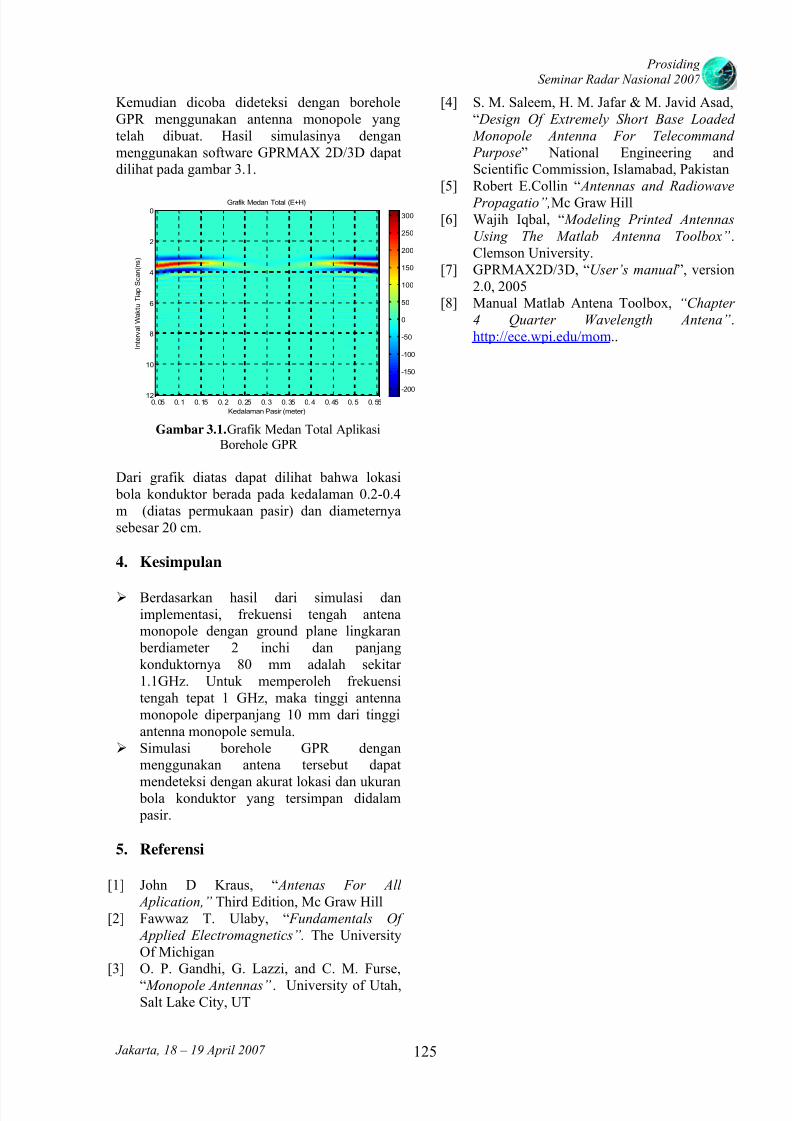
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 133/156
ProsidingSeminar Radar Nasional 2007
Kemudian dicoba dideteksi dengan boreholeGPR menggunakan antenna monopole yangtelah dibuat. Hasil simulasinya denganmenggunakan software GPRMAX 2D/3D dapatdilihat pada gambar 3.1.
Kedalaman Pasir (meter)
I n t e r v a l W a k t u T i a p S c a n ( n s )
Grafik Medan Total (E+H)
0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5 0.55
0
2
4
6
8
10
12 -200
-150
-100
-50
0
50
100
150
200
250
300
Gambar 3.1. Grafik Medan Total Aplikasi
Borehole GPR
Dari grafik diatas dapat dilihat bahwa lokasi bola konduktor berada pada kedalaman 0.2-0.4m (diatas permukaan pasir) dan diameternyasebesar 20 cm.
4. Kesimpulan
Berdasarkan hasil dari simulasi danimplementasi, frekuensi tengah antenamonopole dengan ground plane lingkaran berdiameter 2 inchi dan panjangkonduktornya 80 mm adalah sekitar1.1GHz. Untuk memperoleh frekuensitengah tepat 1 GHz, maka tinggi antennamonopole diperpanjang 10 mm dari tinggiantenna monopole semula.
Simulasi borehole GPR denganmenggunakan antena tersebut dapat
mendeteksi dengan akurat lokasi dan ukuran bola konduktor yang tersimpan didalam pasir.
5. Referensi
[1] John D Kraus, “ Antenas For All
Aplication,” Third Edition, Mc Graw Hill[2] Fawwaz T. Ulaby, “ Fundamentals Of
Applied Electromagnetics”. The UniversityOf Michigan
[3] O. P. Gandhi, G. Lazzi, and C. M. Furse,
“ Monopole Antennas”. University of Utah,Salt Lake City, UT
[4] S. M. Saleem, H. M. Jafar & M. Javid Asad,“ Design Of Extremely Short Base Loaded
Monopole Antenna For Telecommand
Purpose” National Engineering andScientific Commission, Islamabad, Pakistan
[5] Robert E.Collin “ Antennas and Radiowave
Propagatio”, Mc Graw Hill[6] Wajih Iqbal, “ Modeling Printed Antennas
Using The Matlab Antenna Toolbox”.Clemson University.
[7] GPRMAX2D/3D, “User’s manual ”, version2.0, 2005
[8] Manual Matlab Antena Toolbox, “Chapter
4 Quarter Wavelength Antena”.http://ece.wpi.edu/mom..
Jakarta, 18 – 19 April 2007 125

8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 134/156
Prosiding
Seminar Radar Nasional 2007
Karakteristik Curah Hujan di Kototabang
menggunakan Radar Atmosfer Katulistiwa
SuaydhiPusat Pemanfaatan Sains Atmosfer dan Iklim – LAPAN
Jl. Dr. Junjunan 133 Bandung 40173Telp. (022) 6037445, Fax: (022) 6037443
Email: [email protected]
Abstrak Hujan merupakan parameter atmosfer penting yang mempengaruhi hidrologi permukaan tanah, proses-prosesdi pantai, stabilitas lereng, dan sirkulasi iklim dan panas global. Pemahaman tentang intensitas dan distribusihujan dapat memperbaiki perlindungan sumber daya lingkungan dan manusia, dan meningkatkan pengetahuan
tentang proses geofisis tanah, laut, dan atmosfer. Secara historis, pengukuran hujan di Indonesia masihmenggunakan penakar hujan (rain gauge) tradisional yang tersebar di wilayah yang sangat luas. Penggunaan
data penakar hujan dalam penelitian hujan terbatas pada statistik besarnya curah hujan dan periodisitaskejadiannya. Namun untuk meneliti aspek fisisnya diperlukan peralatan yang dapat mengamati fenomena hujan
secara lebih akurat dalam ruang dan waktu. Hal ini diperlukan untuk mengembangkan algoritma prakiraancurah hujan yang lebih akurat. Penelitian tentang mikrofisika hujan kini telah dapat dilakukan dengan adanya
Radar Atmosfer Katulistiwa atau Equatorial Atmosphere Radar (EAR) di Kototabang (Sumatra Barat) yangtelah beroperasi sejak pertengahan tahun 2001. Bebarapa fasilitas pengamatan awan dan hujan tersedia di
lokasi tersebut, di antaranya disdrometer, optical raingauge, X-band rain radar dan boundary layer radar. Dari instrumen-instrumen ini, karakteristik curah hujan di Kototabang dan sekitarnya dapat dipelajari. Denganmenggunaka metode diameter rata-rata tetes hujan dan simpangan bakunya, penentuan tipe hujan konvektifdan stratiform telah dilakukan. Curah hujan di Indonesia umumnya mendapat pengaruh dari fenomena osilasi
Madden-Julian (MJO) yang berperioda antara 30 – 60 harian, tak terkecuali yang teramati di daerah Kototabang. Pada waktu fase MJO tidak aktif, hujan di Kototabang lebih didominasi oleh proses konveksi lokal.
Hujan dari konveksi lokal ini memiliki ukuran butir hujan rata-rata yang lebih besar dibandingkan denganhujan yang terjadi pada waktu fase MJO aktif. Pada fase aktif ini, hujan dihasilkan dari awan-awan skala global dan hujan tipe stratiform lebih sering terjadi.
Kata Kunci: EAR, hujan konvektif, hujan stratiform, MJO.
Abstract Rainfall is an important atmospheric parameter that affects the soil surface hydrology, coastal processes, general circulation, and global heat. Understanding the intensity and distribution of rainfall would improve the protection of environmental and human resources, and also improve our knowledge about soil, marine, and
atmospheric geophysical processes. Until very recently, rainfall measurements in Indonesia are obtained withconventional rain gauge which scattered across very large area of the Indonesian archipelago. The use of data from conventional rain gauges for research is constrained to rain statistics and its periodicity. To investigatethe physical aspects of rainfall, the drops of each rainfall have to be measured in very high temporal resolution.This is needed to develop a more accurate algorithm of rainfall estimates. With the establishment of Equatorial
Atmosphere Radar (EAR) at Kototabang (West Sumatra), which is in operational status since mid 2001,microphysical investigation of rainfall can now be conducted. Several instruments which are dedicated toobserve cloud and rain phenomena are disdrometer, optical rain gauge, X-band rain radar, and boundary layerradar. Characteristics of rainfall at Kototabang and its vicinity are investigated using data from the EAR site. Amethod based on the characteristics of the diameter of the raindrops is used to distinguish rainfall types,between convective and stratiform. Indonesian rainfall is generally influenced by the Madden Julian Oscillation(MJO), which has a cycle between 30 and 60 days, and Kototabang area is no exception. During the inactive
phase of MJO, rainfall at Kototabang is dominated by local convective processes. Rain from this localconvection generally has larger mean raindrop size than that occurs during the active phase of MJO. During
the active phase, rain is generated from large scale clouds, and stratiform rain is more frequently observed.
Keywords: EAR, convective rain, stratiform rain, MJO.
Jakarta, 18 – 19 April 2007 126
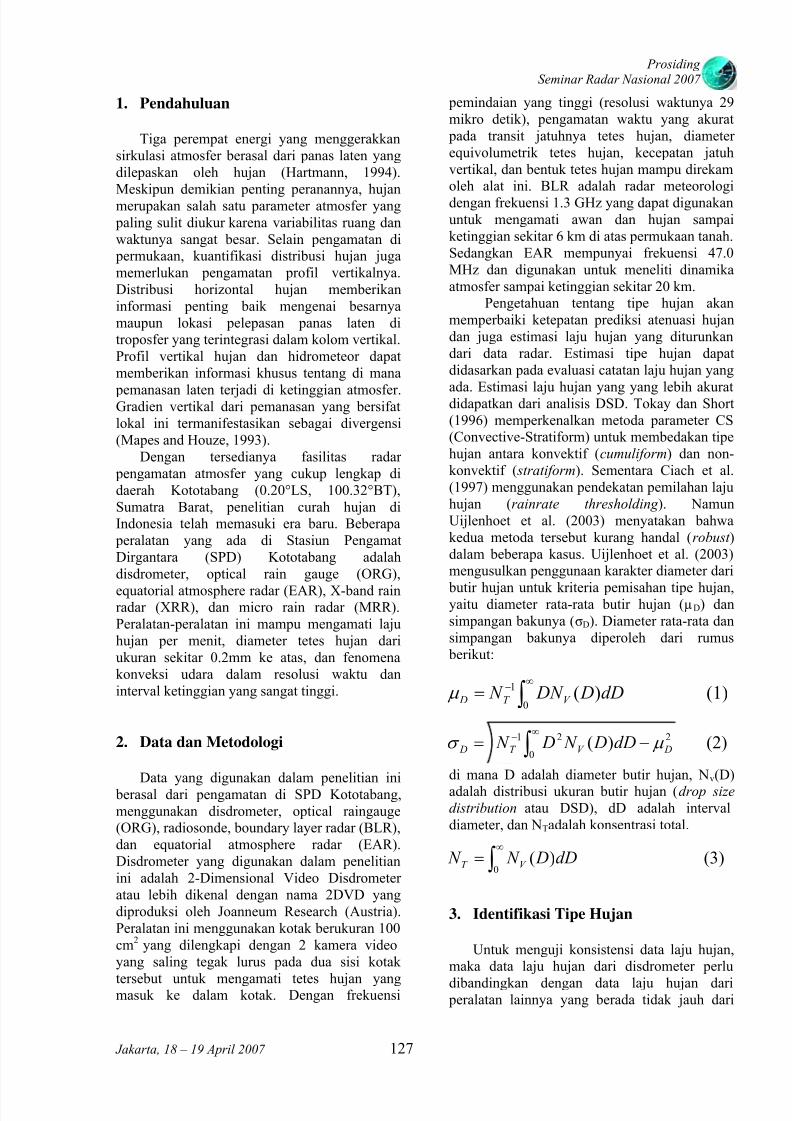
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 135/156
ProsidingSeminar Radar Nasional 2007
1. Pendahuluan
Tiga perempat energi yang menggerakkansirkulasi atmosfer berasal dari panas laten yangdilepaskan oleh hujan (Hartmann, 1994).
Meskipun demikian penting peranannya, hujanmerupakan salah satu parameter atmosfer yang paling sulit diukur karena variabilitas ruang danwaktunya sangat besar. Selain pengamatan di permukaan, kuantifikasi distribusi hujan jugamemerlukan pengamatan profil vertikalnya.Distribusi horizontal hujan memberikaninformasi penting baik mengenai besarnyamaupun lokasi pelepasan panas laten ditroposfer yang terintegrasi dalam kolom vertikal.Profil vertikal hujan dan hidrometeor dapatmemberikan informasi khusus tentang di mana
pemanasan laten terjadi di ketinggian atmosfer.Gradien vertikal dari pemanasan yang bersifatlokal ini termanifestasikan sebagai divergensi(Mapes and Houze, 1993).
Dengan tersedianya fasilitas radar pengamatan atmosfer yang cukup lengkap didaerah Kototabang (0.20°LS, 100.32°BT),Sumatra Barat, penelitian curah hujan diIndonesia telah memasuki era baru. Beberapa peralatan yang ada di Stasiun PengamatDirgantara (SPD) Kototabang adalahdisdrometer, optical rain gauge (ORG),
equatorial atmosphere radar (EAR), X-band rainradar (XRR), dan micro rain radar (MRR).Peralatan-peralatan ini mampu mengamati lajuhujan per menit, diameter tetes hujan dariukuran sekitar 0.2mm ke atas, dan fenomenakonveksi udara dalam resolusi waktu daninterval ketinggian yang sangat tinggi.
2. Data dan Metodologi
Data yang digunakan dalam penelitian ini berasal dari pengamatan di SPD Kototabang,menggunakan disdrometer, optical raingauge(ORG), radiosonde, boundary layer radar (BLR),dan equatorial atmosphere radar (EAR).Disdrometer yang digunakan dalam penelitianini adalah 2-Dimensional Video Disdrometeratau lebih dikenal dengan nama 2DVD yangdiproduksi oleh Joanneum Research (Austria).Peralatan ini menggunakan kotak berukuran 100cm
2 yang dilengkapi dengan 2 kamera video
yang saling tegak lurus pada dua sisi kotak
tersebut untuk mengamati tetes hujan yangmasuk ke dalam kotak. Dengan frekuensi
pemindaian yang tinggi (resolusi waktunya 29mikro detik), pengamatan waktu yang akurat pada transit jatuhnya tetes hujan, diameterequivolumetrik tetes hujan, kecepatan jatuhvertikal, dan bentuk tetes hujan mampu direkamoleh alat ini. BLR adalah radar meteorologidengan frekuensi 1.3 GHz yang dapat digunakanuntuk mengamati awan dan hujan sampaiketinggian sekitar 6 km di atas permukaan tanah.Sedangkan EAR mempunyai frekuensi 47.0MHz dan digunakan untuk meneliti dinamikaatmosfer sampai ketinggian sekitar 20 km.
Pengetahuan tentang tipe hujan akanmemperbaiki ketepatan prediksi atenuasi hujandan juga estimasi laju hujan yang diturunkandari data radar. Estimasi tipe hujan dapatdidasarkan pada evaluasi catatan laju hujan yang
ada. Estimasi laju hujan yang yang lebih akuratdidapatkan dari analisis DSD. Tokay dan Short(1996) memperkenalkan metoda parameter CS(Convective-Stratiform) untuk membedakan tipehujan antara konvektif (cumuliform) dan non-konvektif ( stratiform). Sementara Ciach et al.(1997) menggunakan pendekatan pemilahan lajuhujan (rainrate thresholding ). NamunUijlenhoet et al. (2003) menyatakan bahwakedua metoda tersebut kurang handal (robust )dalam beberapa kasus. Uijlenhoet et al. (2003)mengusulkan penggunaan karakter diameter dari
butir hujan untuk kriteria pemisahan tipe hujan,yaitu diameter rata-rata butir hujan (µD) dansimpangan bakunya (σD). Diameter rata-rata dansimpangan bakunya diperoleh dari rumus berikut:
(1) )(0
1∫∞−= dD D DN
di mana D adalah diameter butir hujan, Nv(D)adalah distribusi ukuran butir hujan (drop size
distribution atau DSD), dD adalah intervaldiameter, dan NT adalah konsentrasi total.
3. Identifikasi Tipe Hujan
Untuk menguji konsistensi data laju hujan,maka data laju hujan dari disdrometer perlu
dibandingkan dengan data laju hujan dari peralatan lainnya yang berada tidak jauh dari
N V T Dµ
(2) )(0
221∫∞− −= DV T D dD D N D N µ σ
(3) )(0∫∞
= dD D N N V T
Jakarta, 18 – 19 April 2007 127
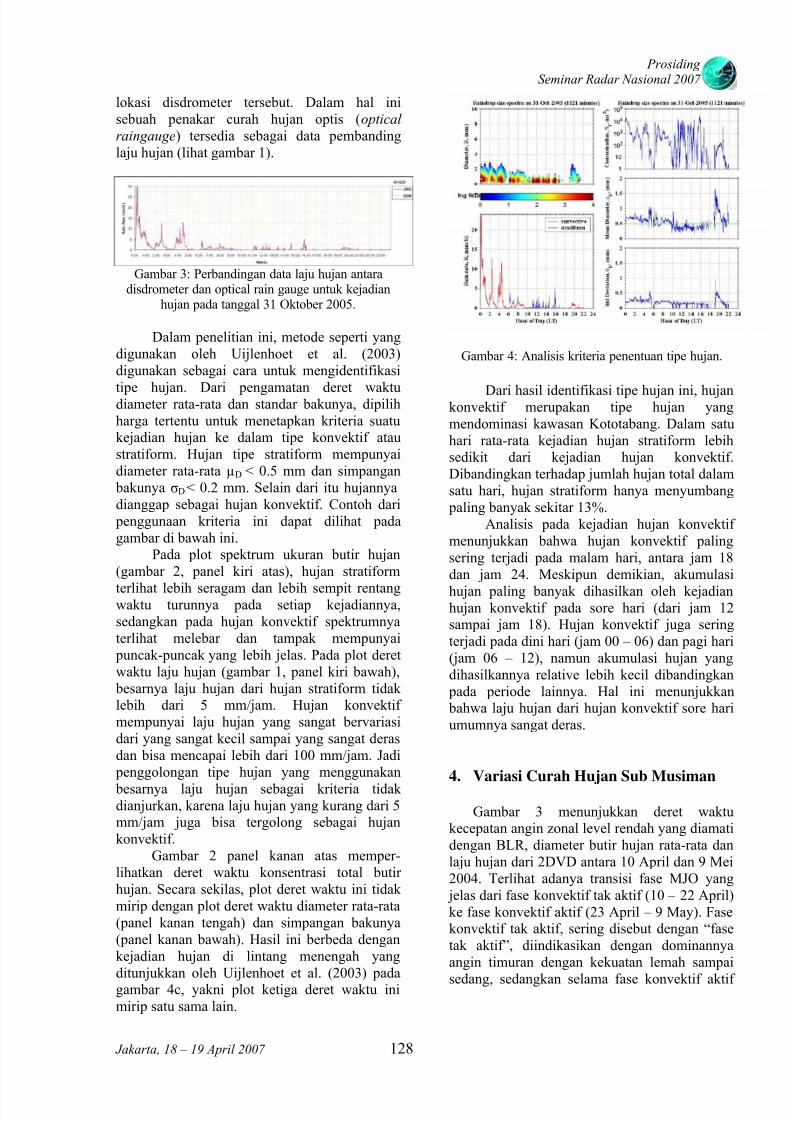
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 136/156
ProsidingSeminar Radar Nasional 2007
lokasi disdrometer tersebut. Dalam hal inisebuah penakar curah hujan optis (optical
raingauge) tersedia sebagai data pembandinglaju hujan (lihat gambar 1).
Gambar 3: Perbandingan data laju hujan antaradisdrometer dan optical rain gauge untuk kejadian
hujan pada tanggal 31 Oktober 2005.
Dalam penelitian ini, metode seperti yangdigunakan oleh Uijlenhoet et al. (2003)digunakan sebagai cara untuk mengidentifikasi
tipe hujan. Dari pengamatan deret waktudiameter rata-rata dan standar bakunya, dipilihharga tertentu untuk menetapkan kriteria suatukejadian hujan ke dalam tipe konvektif ataustratiform. Hujan tipe stratiform mempunyaidiameter rata-rata µD < 0.5 mm dan simpangan bakunya σD < 0.2 mm. Selain dari itu hujannyadianggap sebagai hujan konvektif. Contoh dari penggunaan kriteria ini dapat dilihat padagambar di bawah ini.
Pada plot spektrum ukuran butir hujan(gambar 2, panel kiri atas), hujan stratiform
terlihat lebih seragam dan lebih sempit rentangwaktu turunnya pada setiap kejadiannya,sedangkan pada hujan konvektif spektrumnyaterlihat melebar dan tampak mempunyai puncak-puncak yang lebih jelas. Pada plot deretwaktu laju hujan (gambar 1, panel kiri bawah), besarnya laju hujan dari hujan stratiform tidaklebih dari 5 mm/jam. Hujan konvektifmempunyai laju hujan yang sangat bervariasidari yang sangat kecil sampai yang sangat derasdan bisa mencapai lebih dari 100 mm/jam. Jadi penggolongan tipe hujan yang menggunakan
besarnya laju hujan sebagai kriteria tidakdianjurkan, karena laju hujan yang kurang dari 5mm/jam juga bisa tergolong sebagai hujankonvektif.
Gambar 2 panel kanan atas memper-lihatkan deret waktu konsentrasi total butirhujan. Secara sekilas, plot deret waktu ini tidakmirip dengan plot deret waktu diameter rata-rata(panel kanan tengah) dan simpangan bakunya(panel kanan bawah). Hasil ini berbeda dengankejadian hujan di lintang menengah yangditunjukkan oleh Uijlenhoet et al. (2003) padagambar 4c, yakni plot ketiga deret waktu inimirip satu sama lain.
Gambar 4: Analisis kriteria penentuan tipe hujan.
Dari hasil identifikasi tipe hujan ini, hujankonvektif merupakan tipe hujan yangmendominasi kawasan Kototabang. Dalam satuhari rata-rata kejadian hujan stratiform lebihsedikit dari kejadian hujan konvektif.Dibandingkan terhadap jumlah hujan total dalamsatu hari, hujan stratiform hanya menyumbang paling banyak sekitar 13%.
Analisis pada kejadian hujan konvektifmenunjukkan bahwa hujan konvektif palingsering terjadi pada malam hari, antara jam 18dan jam 24. Meskipun demikian, akumulasi
hujan paling banyak dihasilkan oleh kejadianhujan konvektif pada sore hari (dari jam 12sampai jam 18). Hujan konvektif juga seringterjadi pada dini hari (jam 00 – 06) dan pagi hari(jam 06 – 12), namun akumulasi hujan yangdihasilkannya relative lebih kecil dibandingkan pada periode lainnya. Hal ini menunjukkan bahwa laju hujan dari hujan konvektif sore hariumumnya sangat deras.
4. Variasi Curah Hujan Sub Musiman
Gambar 3 menunjukkan deret waktukecepatan angin zonal level rendah yang diamatidengan BLR, diameter butir hujan rata-rata danlaju hujan dari 2DVD antara 10 April dan 9 Mei2004. Terlihat adanya transisi fase MJO yang jelas dari fase konvektif tak aktif (10 – 22 April)ke fase konvektif aktif (23 April – 9 May). Fasekonvektif tak aktif, sering disebut dengan “fasetak aktif”, diindikasikan dengan dominannyaangin timuran dengan kekuatan lemah sampai
sedang, sedangkan selama fase konvektif aktif
Jakarta, 18 – 19 April 2007 128
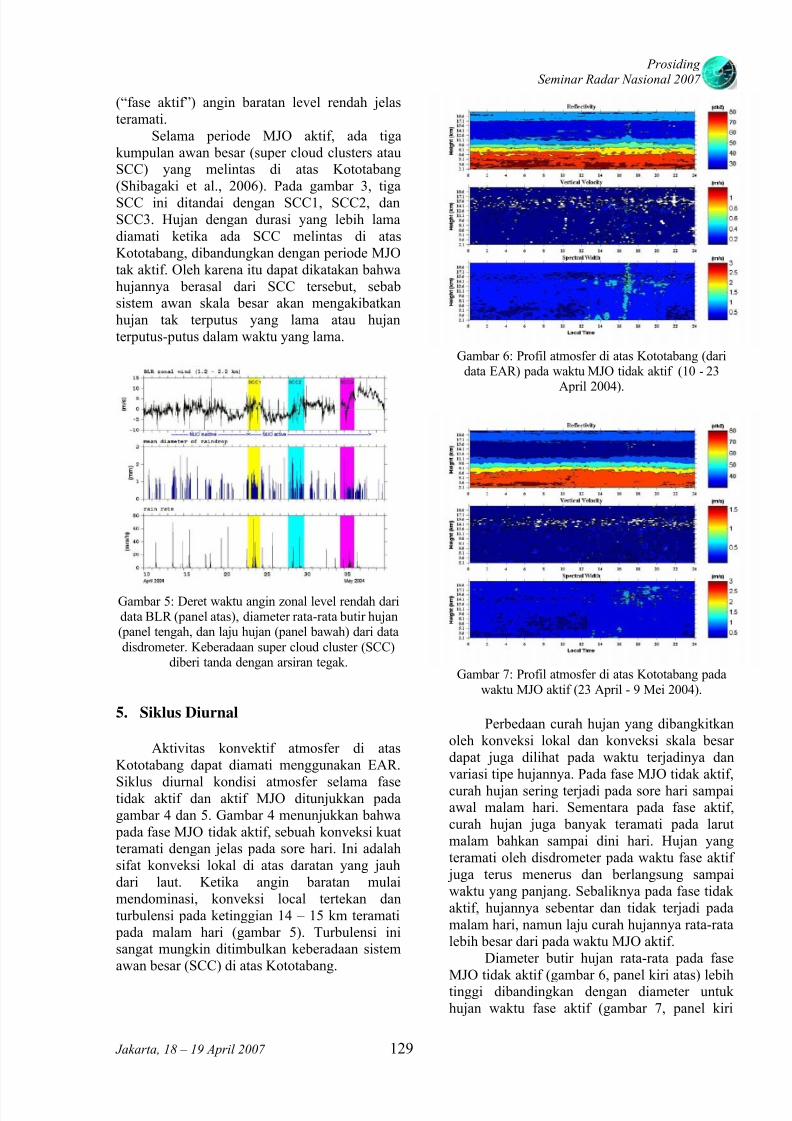
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 137/156
ProsidingSeminar Radar Nasional 2007
(“fase aktif”) angin baratan level rendah jelasteramati.
Selama periode MJO aktif, ada tigakumpulan awan besar (super cloud clusters atauSCC) yang melintas di atas Kototabang(Shibagaki et al., 2006). Pada gambar 3, tigaSCC ini ditandai dengan SCC1, SCC2, danSCC3. Hujan dengan durasi yang lebih lamadiamati ketika ada SCC melintas di atasKototabang, dibandungkan dengan periode MJOtak aktif. Oleh karena itu dapat dikatakan bahwahujannya berasal dari SCC tersebut, sebabsistem awan skala besar akan mengakibatkanhujan tak terputus yang lama atau hujanterputus-putus dalam waktu yang lama.
Gambar 5: Deret waktu angin zonal level rendah daridata BLR (panel atas), diameter rata-rata butir hujan(panel tengah, dan laju hujan (panel bawah) dari datadisdrometer. Keberadaan super cloud cluster (SCC)
diberi tanda dengan arsiran tegak.
5. Siklus Diurnal
Aktivitas konvektif atmosfer di atasKototabang dapat diamati menggunakan EAR.
Siklus diurnal kondisi atmosfer selama fasetidak aktif dan aktif MJO ditunjukkan padagambar 4 dan 5. Gambar 4 menunjukkan bahwa pada fase MJO tidak aktif, sebuah konveksi kuatteramati dengan jelas pada sore hari. Ini adalahsifat konveksi lokal di atas daratan yang jauhdari laut. Ketika angin baratan mulaimendominasi, konveksi local tertekan danturbulensi pada ketinggian 14 – 15 km teramati pada malam hari (gambar 5). Turbulensi inisangat mungkin ditimbulkan keberadaan sistemawan besar (SCC) di atas Kototabang.
Gambar 6: Profil atmosfer di atas Kototabang (daridata EAR) pada waktu MJO tidak aktif (10 - 23
April 2004).
Gambar 7: Profil atmosfer di atas Kototabang padawaktu MJO aktif (23 April - 9 Mei 2004).
Perbedaan curah hujan yang dibangkitkanoleh konveksi lokal dan konveksi skala besardapat juga dilihat pada waktu terjadinya danvariasi tipe hujannya. Pada fase MJO tidak aktif,
curah hujan sering terjadi pada sore hari sampaiawal malam hari. Sementara pada fase aktif,curah hujan juga banyak teramati pada larutmalam bahkan sampai dini hari. Hujan yangteramati oleh disdrometer pada waktu fase aktif juga terus menerus dan berlangsung sampaiwaktu yang panjang. Sebaliknya pada fase tidakaktif, hujannya sebentar dan tidak terjadi padamalam hari, namun laju curah hujannya rata-ratalebih besar dari pada waktu MJO aktif.
Diameter butir hujan rata-rata pada fase
MJO tidak aktif (gambar 6, panel kiri atas) lebihtinggi dibandingkan dengan diameter untukhujan waktu fase aktif (gambar 7, panel kiri
Jakarta, 18 – 19 April 2007 129
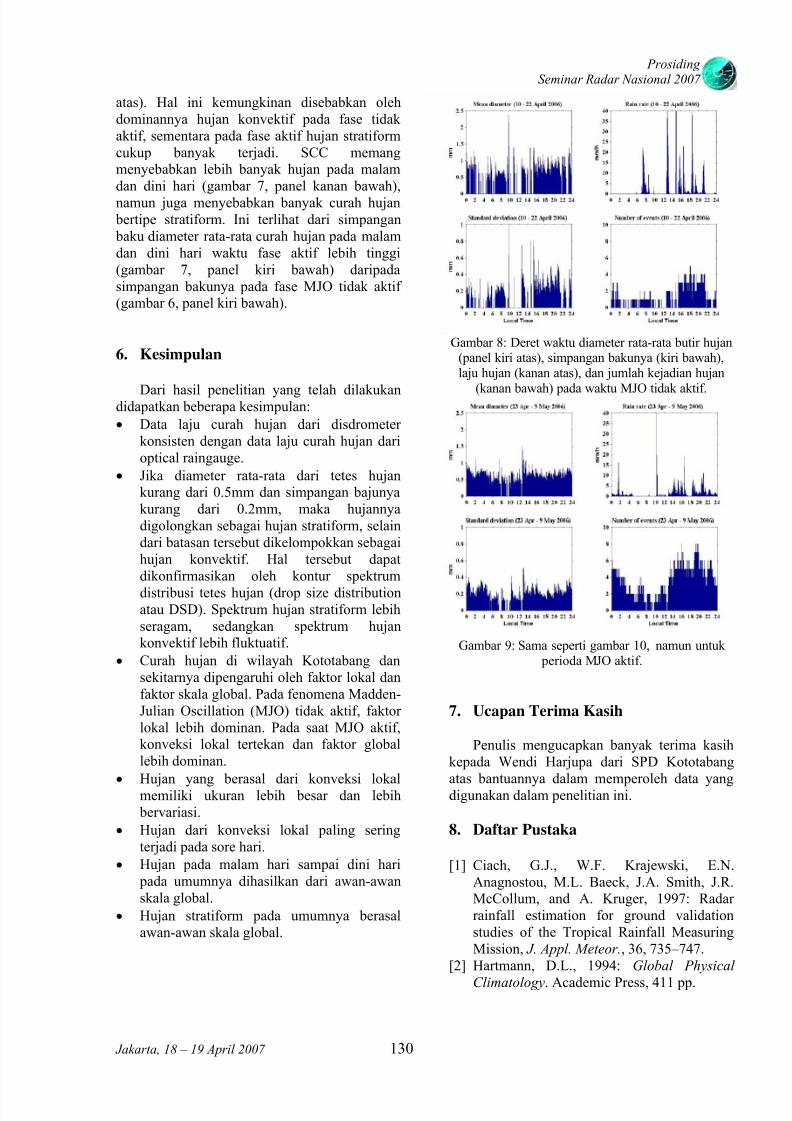
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 138/156
ProsidingSeminar Radar Nasional 2007
atas). Hal ini kemungkinan disebabkan olehdominannya hujan konvektif pada fase tidakaktif, sementara pada fase aktif hujan stratiformcukup banyak terjadi. SCC memangmenyebabkan lebih banyak hujan pada malamdan dini hari (gambar 7, panel kanan bawah),namun juga menyebabkan banyak curah hujan bertipe stratiform. Ini terlihat dari simpangan baku diameter rata-rata curah hujan pada malamdan dini hari waktu fase aktif lebih tinggi(gambar 7, panel kiri bawah) daripadasimpangan bakunya pada fase MJO tidak aktif(gambar 6, panel kiri bawah).
6. Kesimpulan
Dari hasil penelitian yang telah dilakukandidapatkan beberapa kesimpulan:
• Data laju curah hujan dari disdrometerkonsisten dengan data laju curah hujan darioptical raingauge.
• Jika diameter rata-rata dari tetes hujankurang dari 0.5mm dan simpangan bajunyakurang dari 0.2mm, maka hujannyadigolongkan sebagai hujan stratiform, selaindari batasan tersebut dikelompokkan sebagaihujan konvektif. Hal tersebut dapatdikonfirmasikan oleh kontur spektrum
distribusi tetes hujan (drop size distributionatau DSD). Spektrum hujan stratiform lebihseragam, sedangkan spektrum hujankonvektif lebih fluktuatif.
• Curah hujan di wilayah Kototabang dansekitarnya dipengaruhi oleh faktor lokal danfaktor skala global. Pada fenomena Madden-Julian Oscillation (MJO) tidak aktif, faktorlokal lebih dominan. Pada saat MJO aktif,konveksi lokal tertekan dan faktor globallebih dominan.
• Hujan yang berasal dari konveksi lokalmemiliki ukuran lebih besar dan lebih bervariasi.
• Hujan dari konveksi lokal paling seringterjadi pada sore hari.
• Hujan pada malam hari sampai dini hari pada umumnya dihasilkan dari awan-awanskala global.
• Hujan stratiform pada umumnya berasalawan-awan skala global.
Gambar 8: Deret waktu diameter rata-rata butir hujan(panel kiri atas), simpangan bakunya (kiri bawah),laju hujan (kanan atas), dan jumlah kejadian hujan
(kanan bawah) pada waktu MJO tidak aktif.
Gambar 9: Sama seperti gambar 10, namun untuk perioda MJO aktif.
7. Ucapan Terima Kasih
Penulis mengucapkan banyak terima kasihkepada Wendi Harjupa dari SPD Kototabang
atas bantuannya dalam memperoleh data yangdigunakan dalam penelitian ini.
8. Daftar Pustaka
[1] Ciach, G.J., W.F. Krajewski, E.N.Anagnostou, M.L. Baeck, J.A. Smith, J.R.McCollum, and A. Kruger, 1997: Radarrainfall estimation for ground validationstudies of the Tropical Rainfall MeasuringMission, J. Appl. Meteor., 36, 735–747.
[2] Hartmann, D.L., 1994: Global Physical
Climatology. Academic Press, 411 pp.
Jakarta, 18 – 19 April 2007 130
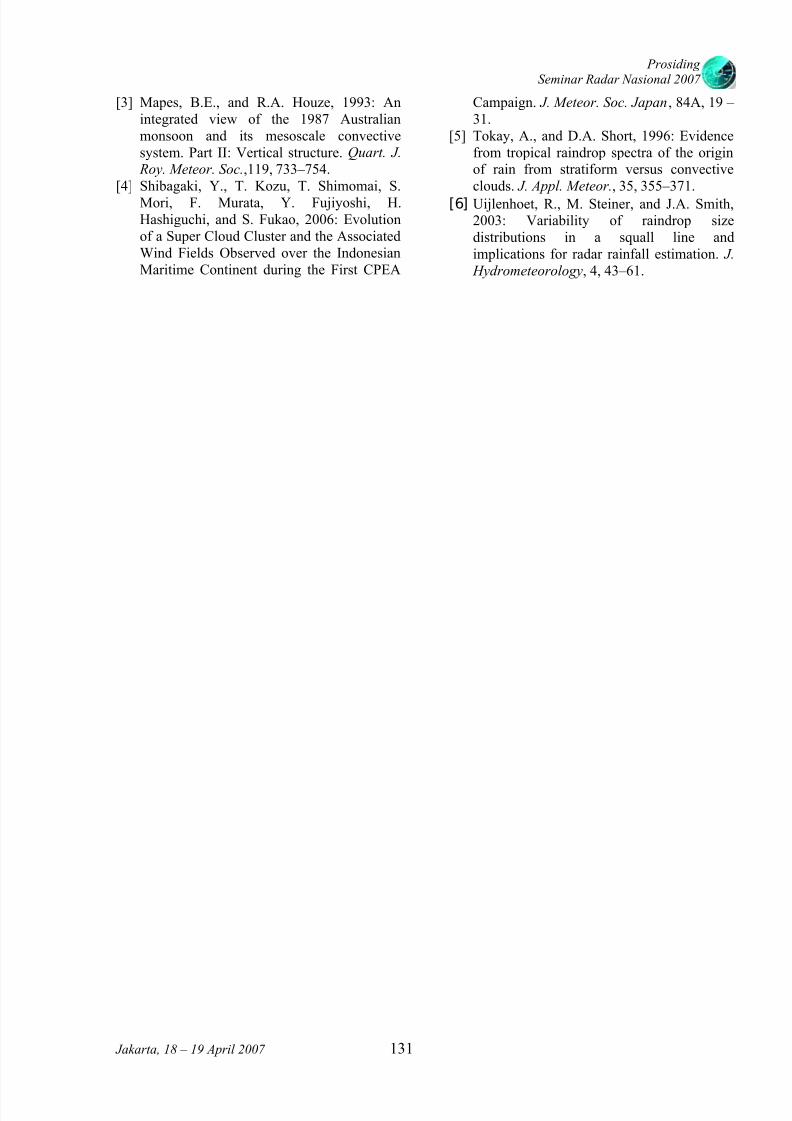
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 139/156
ProsidingSeminar Radar Nasional 2007
[3] Mapes, B.E., and R.A. Houze, 1993: Anintegrated view of the 1987 Australianmonsoon and its mesoscale convectivesystem. Part II: Vertical structure. Quart. J.
Roy. Meteor. Soc.,119, 733–754.[4] Shibagaki, Y., T. Kozu, T. Shimomai, S.
Mori, F. Murata, Y. Fujiyoshi, H.Hashiguchi, and S. Fukao, 2006: Evolutionof a Super Cloud Cluster and the AssociatedWind Fields Observed over the IndonesianMaritime Continent during the First CPEA
Campaign. J. Meteor. Soc. Japan, 84A, 19 –31.
[5] Tokay, A., and D.A. Short, 1996: Evidencefrom tropical raindrop spectra of the originof rain from stratiform versus convectiveclouds. J. Appl. Meteor., 35, 355–371.
[6] Uijlenhoet, R., M. Steiner, and J.A. Smith,2003: Variability of raindrop sizedistributions in a squall line andimplications for radar rainfall estimation. J.
Hydrometeorology, 4, 43–61.
Jakarta, 18 – 19 April 2007 131
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 140/156
ProsidingSeminar Radar Nasional 2007
MODEL ANTENA PITA LEBAR BERBAHAN LIMBAH
DAN UJI HIPOTESIS ANTENA
SoetamsoDepartemen Teknik Elektro STTTelkom
Jl. Telekomunikasi – Dayeuh Kolot Bandung 40257Tlp. 62 22 7564500 – 7564108 Fax. 62 22 7565933
E – mail : [email protected]
ABSTRAKSelama 16 minggu dapat dihasilkan (10-1) prototipe model antena pita lebar dan dapat dihemat waktu 16% dari studi normal, secara penyelarasan tridharma dengan QS. 17 : 27, kebanyakan berdasarkan definisi baru tentangantena; dan satu sistem pengukuran konstanta bahan.
Kata kunci : keselarasan tridharma, model pita lebar, definisi baru.
ABSTRACT
Within 16 weeks, (10-1) prototypes of wide band antenna model and 16% of usual time study is saved byharmonizing the tridharma with QS 17 : 27, mostly based on a new definition of antenna; and one of material
constant measurement system.
Key word : harmonizing the tridharma, wide band model, new definition.
1. PENDAHULUANPara pemboros itu saudara syaitan dan
ingkar kepada Tuhannya. Begitulah rangkumansabda Allah di dalam Al Quran surat ke-17 ayat ke27 ( QS 17 : 27[1] ). Supaya tunduk kepada Allahmaka harus berhemat. Karena itulah maka ketigadharma dari tridharma dilaksanakan secara serentak
supaya hemat waktu, biaya dan sumber dayalainnya. Pembelajarannya secara pengembangtelitian yang menghasilkan suatu prototipe untuk mengembangkan kemandirian dankeramahan lingkungan.
Pembelajar sebagai manajer – kelas danfasilitator dalam pengembangan potensi,menyediakan berbagai judul pengembangtelitian beserta abstraknya ( sebagian ) yang berkaitandengan mata pelajaran tertentu yang diampunya.Khas untuk pelajaran teknik antena, setiap judul berguna untuk studi kelompok dalam persiapan dan pelaksanaan praktikum. Pengembangan selanjutnyauntuk Proyek Akhir perorangan. Sebagian judul berkaitan dengan definisi lama dan sebagianlainnya yang berdefinisi baru supaya dapatdibandingkan.
Sembilan prototipe model antena pita lebardan satu sistem uji konstanta bahan dapatdihasilkan oleh 10 mahasiswa yang di bimbing olehseorang pembimbing – 1 yang mengajar danmenyediakan judul dengan bantuan seorang pembimbing – 2 untuk setiap mahasiswa. Kali inidilaksanakan selama September 2006 sampaiJanuari 2007. Sepuluh rancangbangun dan NIMPemroyek akhir dan Pembimbing – 2 – nya sepertidi tabel T 1.
T. 1 Prototipe 9 Antena &1 Uji Bahan
NoPrototipe( Judul )
NIM611.....
Pb - 2Catatan
1TriculaUnidireksional
040062 ARF CT
2Tricula Omni 2,0± 0,5 GHz
041005 KRS -
3Hexagonal Omni2,0 ± 0,5 GHz 041017 ARF CC
4Septagonal Omni1,6 - 2,2 GHz
041021 TEA C
5CatursilangBinomial 2,0 ±0,3 GHz Omni
041023 TEA -
6AntenaDemonstrator
040054 SPY C
7Bikonikal Acuan2,0 ± 0,5 GHzOmni
030032 BSM
8Kolinier OmniBikonikal Kawat
030056 BSN
9Kolinier SlotKupu Unidir 030012 BSN
10Penguji KonstantaLimbah
030016 SWD
Keterangan :61104....,...03...= D3 angkatan 2004, 2003CT = Cumlaude IPK tertinggiCC = Cumlaude tercepatC = CumlaudePb – 2 = singkatan nama Pembimbing – 2tersebut di Ucapan Terimakasih.
132
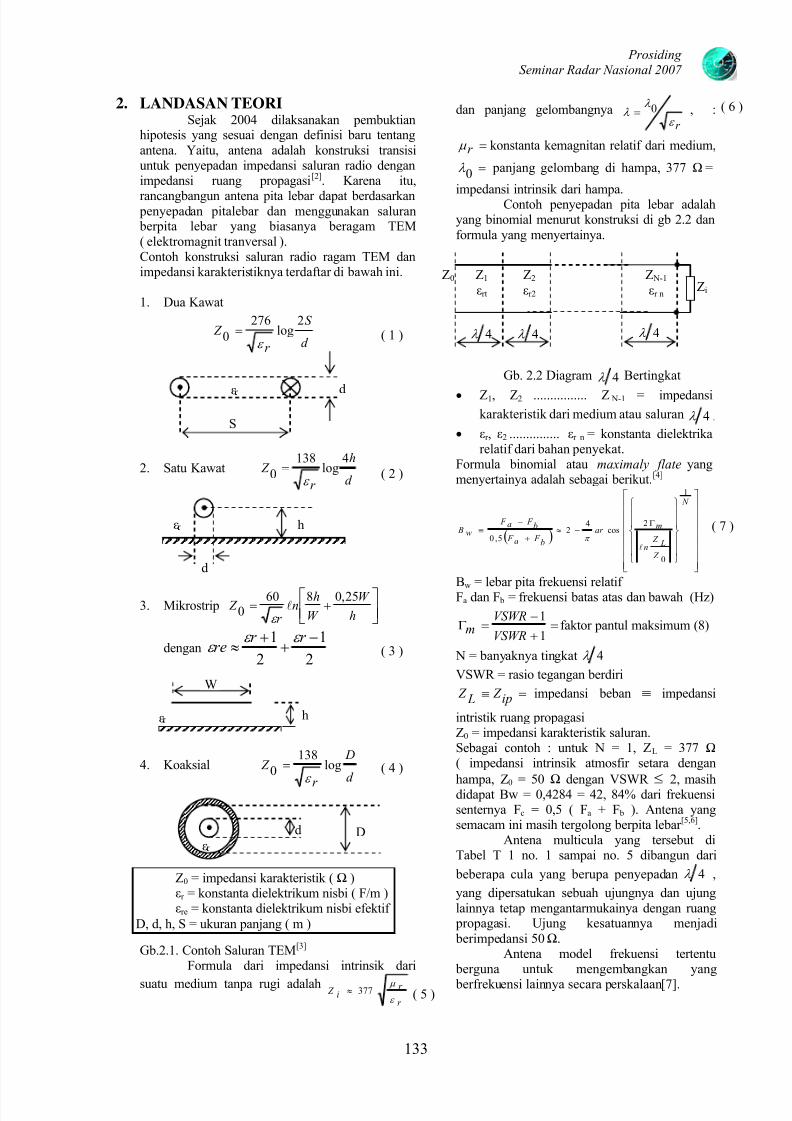
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 141/156
ProsidingSeminar Radar Nasional 2007
2. LANDASAN TEORISejak 2004 dilaksanakan pembuktian
hipotesis yang sesuai dengan definisi baru tentangantena. Yaitu, antena adalah konstruksi transisiuntuk penyepadan impedansi saluran radio denganimpedansi ruang propagasi[2]. Karena itu,
rancangbangun antena pita lebar dapat berdasarkan penyepadan pitalebar dan menggunakan saluran berpita lebar yang biasanya beragam TEM( elektromagnit tranversal ).Contoh konstruksi saluran radio ragam TEM danimpedansi karakteristiknya terdaftar di bawah ini.
1. Dua Kawat
d
S
r
Z 2
log276
0ε
=
2. Satu Kawatd
h
r
Z 4
log138
0ε
=
3. Mikrostrip ⎥⎦⎤
⎢⎣⎡ +=
h
W
W
hn
r Z
25,08600 l
ε
dengan2
1
2
1 −+
+≈
r r re
ε ε ε
4. Koaksiald
D
r
Z log138
0ε
=
Gb.2.1. Contoh Saluran TEM[3]
Formula dari impedansi intrinsik dari
suatu medium tanpa rugi adalahr
r i Z
ε
µ 377≈ ,
dan panjang gelombangnyar ε
λ λ 0= , :
=r µ konstanta kemagnitan relatif dari medium,
panjang gelombang di hampa, 377 Ω =
impedansi intrinsik dari hampa.
=0λ
Contoh penyepadan pita lebar adalahyang binomial menurut konstruksi di gb 2.2 danformula yang menyertainya.
Gb. 2.2 Diagram 4λ Bertingkat
( 6 )
Z0 Z1
εrt
Z2
εr2
Z N-1
εr nZi
• Z1, Z2 ................ Z N-1 = impedansi
karakteristik dari medium atau saluran 4λ .
• εr , ε2 ............... εr n = konstanta dielektrikarelatif dari bahan penyekat.
Formula binomial atau maximaly flate yangmenyertainya adalah sebagai berikut.[4]
( )
⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
⎪⎪
⎭
⎪⎪
⎬
⎫
⎪⎪
⎩
⎪⎪
⎨
⎧
Γ−≈
+
−≡
N
Z
L Z n
mar
b F a F
b F a F
w B
1
0
2cos
42
5,0l
π
Bw = lebar pita frekuensi relatif
Fa dan F b = frekuensi batas atas dan bawah (Hz)
=+
−=Γ
1
1
VSWR
VSWRm faktor pantul maksimum (8)
N = banyaknya tingkat 4λ
VSWR = rasio tegangan berdiri
=≡ ip Z L Z impedansi beban ≡ impedansi
intristik ruang propagasiZ0 = impedansi karakteristik saluran.Sebagai contoh : untuk N = 1, ZL = 377 Ω ( impedansi intrinsik atmosfir setara dengan
hampa, Z0 = 50 Ω dengan VSWR ≤ 2, masihdidapat Bw = 0,4284 = 42, 84% dari frekuensisenternya Fc = 0,5 ( Fa + F b ). Antena yangsemacam ini masih tergolong berpita lebar
[5,6].
Antena multicula yang tersebut diTabel T 1 no. 1 sampai no. 5 dibangun dari
beberapa cula yang berupa penyepadan 4λ ,
yang dipersatukan sebuah ujungnya dan ujung
lainnya tetap mengantarmukainya dengan ruang propagasi. Ujung kesatuannya menjadi
berimpedansi 50Ω.Antena model frekuensi tertentu
berguna untuk mengembangkan yang
berfrekuensi lainnya secara perskalaan[7].
S
ε d
h
d
ε
W
ε h
ε
d D
Z0 = impedansi karakteristik ( Ω )εr = konstanta dielektrikum nisbi ( F/m )εre = konstanta dielektrikum nisbi efektif
D, d, h, S = ukuran panjang ( m )
( 1 )
( 2 )
( 3 )
( 4 )
( 5 )
( 7 )
4λ 4λ 4λ
133
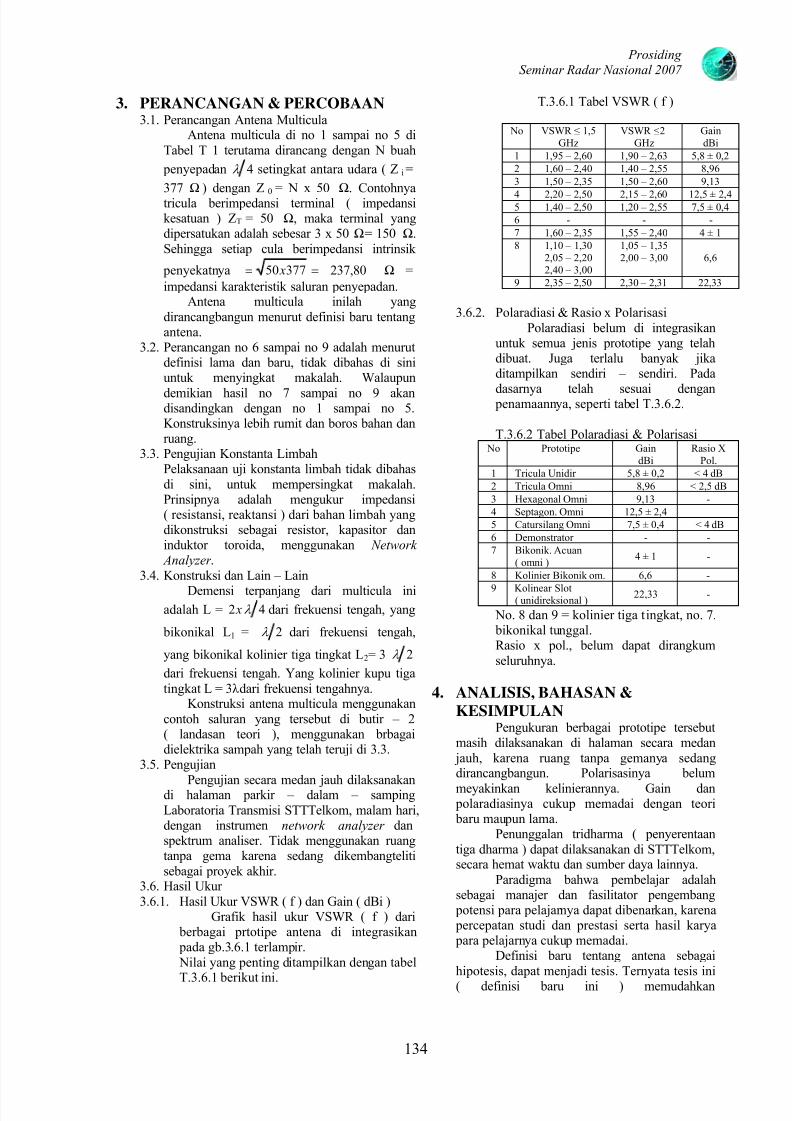
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 142/156
ProsidingSeminar Radar Nasional 2007
3. PERANCANGAN & PERCOBAAN3.1. Perancangan Antena Multicula
Antena multicula di no 1 sampai no 5 diTabel T 1 terutama dirancang dengan N buah
penyepadan 4λ setingkat antara udara ( Z i =
377 Ω ) dengan Z 0 = N x 50 Ω. Contohnyatricula berimpedansi terminal ( impedansikesatuan ) ZT = 50 Ω, maka terminal yangdipersatukan adalah sebesar 3 x 50 Ω = 150 Ω.Sehingga setiap cula berimpedansi intrinsik
penyekatnya == 37750 x 237,80 Ω =
impedansi karakteristik saluran penyepadan.Antena multicula inilah yang
dirancangbangun menurut definisi baru tentangantena.
3.2. Perancangan no 6 sampai no 9 adalah menurutdefinisi lama dan baru, tidak dibahas di siniuntuk menyingkat makalah. Walaupun
demikian hasil no 7 sampai no 9 akandisandingkan dengan no 1 sampai no 5.Konstruksinya lebih rumit dan boros bahan danruang.
3.3. Pengujian Konstanta LimbahPelaksanaan uji konstanta limbah tidak dibahasdi sini, untuk mempersingkat makalah.Prinsipnya adalah mengukur impedansi( resistansi, reaktansi ) dari bahan limbah yangdikonstruksi sebagai resistor, kapasitor daninduktor toroida, menggunakan Network Analyzer .
3.4. Konstruksi dan Lain – Lain
Demensi terpanjang dari multicula iniadalah L = 42 λ x dari frekuensi tengah, yang
bikonikal L1 = 2λ dari frekuensi tengah,
yang bikonikal kolinier tiga tingkat L2 = 3 2λ
dari frekuensi tengah. Yang kolinier kupu tigatingkat L = 3λ dari frekuensi tengahnya.
Konstruksi antena multicula menggunakancontoh saluran yang tersebut di butir – 2( landasan teori ), menggunakan brbagaidielektrika sampah yang telah teruji di 3.3.
3.5. Pengujian
Pengujian secara medan jauh dilaksanakandi halaman parkir – dalam – sampingLaboratoria Transmisi STTTelkom, malam hari,dengan instrumen network analyzer danspektrum analiser. Tidak menggunakan ruangtanpa gema karena sedang dikembangtelitisebagai proyek akhir.
3.6. Hasil Ukur3.6.1. Hasil Ukur VSWR ( f ) dan Gain ( dBi )
Grafik hasil ukur VSWR ( f ) dari berbagai prtotipe antena di integrasikan pada gb.3.6.1 terlampir. Nilai yang penting ditampilkan dengan tabel
T.3.6.1 berikut ini.
T.3.6.1 Tabel VSWR ( f )
N 1,5 ≤ 2dBi
o VSWR ≤GHz
VSWR GHz
Gain
1 2,60 2,63 0,21,95 – 1,90 – 5,8 ±
2 2,40 2,55 8,961,60 – 1,40 –
3 2,35 2,60 9,131,50 – 1,50 –
4 2,50 2,6 2,42,20 – 2,15 – 0 12,5 ±5 2,50 2,55 0,41,40 – 1,20 – 7,5 ±
6 - - -
7 2,35 2,401,60 – 1,55 – 4 ± 1
8 1,302,203,00
1,353,00 6,6
1,10 –2,05 –2,40 –
1,05 –2,00 –
9 2,50 2,31 2,332,35 – 2,30 – 2
3.6.2. Polaradiasi & Rasio x Polarisasi
Polaradiasi belum di integrasikanuntuk semua jenis prototipe yang telahdibuat. Juga terlalu banyak jikaditampilkan sendiri – sendiri. Pada
dasarnya telah sesuai dengan penamaannya, seperti tabel T.3.6.2.
T.3.6.2 Tabel Polaradiasi & Polarisasi No tipe ain
dBiio X
Pol.Proto G Ras
1 Tricula Unidir 0,2 dB5,8 ± < 4
2 Tricula Omni 8,96 dB< 2,5
3 Hexagonal Omni 9,13 -
4 Septagon. Omni 2,412,5 ±
5 Catursilang Omni 0,4 dB7,5 ± < 4
6 Demonstrator - -
7 Bikonik. Ac( om
uanni )
-4 ± 1
8 Kolinier Bikonik om. 6,6 -
9 Kolinear( unidireksio
Slotnal )
2,33 -2
No. 8 dan 9 = kolinier tiga tingkat, no. 7. bikonikal tunggal.Rasio x pol., belum dapat dirangkumseluruhnya.
4. ANALISIS, BAHASAN &
KESIMPULANPengukuran berbagai prototipe tersebut
masih dilaksanakan di halaman secara medan jauh, karena ruang tanpa gemanya sedangdirancangbangun. Polarisasinya belum
meyakinkan kelinierannya. Gain dan polaradiasinya cukup memadai dengan teori baru maupun lama.
Penunggalan tridharma ( penyerentaantiga dharma ) dapat dilaksanakan di STTTelkom,secara hemat waktu dan sumber daya lainnya.
Paradigma bahwa pembelajar adalahsebagai manajer dan fasilitator pengembang potensi para pelajarnya dapat dibenarkan, karena percepatan studi dan prestasi serta hasil karya para pelajarnya cukup memadai.
Definisi baru tentang antena sebagaihipotesis, dapat menjadi tesis. Ternyata tesis ini
( definisi baru ini ) memudahkan
134
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 143/156
ProsidingSeminar Radar Nasional 2007
perancangbangunan antena pita lebar bergainmemadai dan berdimensi kecil dan ringkas.
Model prototipe berbagai antena ini dapatdiskalakan untuk wilayah frekuensi lainnya.Dibuktikan puluhan tahun lalu di PT INTI PerseroBandung, oleh penulis ini.
UCAPAN TERIMAKASIH
Ucapan terimakasih disampaikan kepadaseluruh sivitas akademika STTTelkom, terutamakepada :1. Para mahasiswa dan para asisten laboratoria beserta
Ketua Laboratoria Transmisi STTTelkom,khususnya para pemroyek akhir yang NIM – nyatercantum di Tabel T.1 di pendahuluan.
2. Para pembimbing – 2, yaitu Saudara dan Bapak :(1) ARF = Arfianto Fahmi, ST, MT
(2) KRS = Kris Sujatmoko, ST, MT(3) TEA = Ir. Teha Tearalangi(4) SPY = Drs. Suprayogi, MT(5) BSM = Ir. Bambang Sumajudin, MT(6) BSN = Bambang Setia Nugraha, ST, MT(7) SWD = Drs. Suwandi, Msi.
DAFTAR PUSTAKA
[1] Departemen Agama RI, Al Quran danTerjemahannya, Ed. Baru – revisi 2000, KaryaUtama, Surabaya 2000.
[2] Soetamso dan Dr. Mukhidin, ST, MPd, LaporanPenelitian Pembelajaran Inkuiris tentang Antena,STTTelkom, 2005.
[3] Jasik cs, Antenna Engineering Handbook, Mc Graw Hill Inc, NY, 1984
[4] Pozar David M, Microwave Engineering, JohnWiley & Sons 3th Ed., Singapore, 2003.
[5] Connor FR, Antennas, 2nd Ed, Edward Arnold ,London, 1992.
[6] Kraus JD, Cs, Antennas For All Aplications, McGraw Hill.Inc., Singapore, 2002.
[7] Week Walter L, Cs, Antenna Engineering, Tata McGraw Hill Comp. LTD, New Delhi, 1974.
135
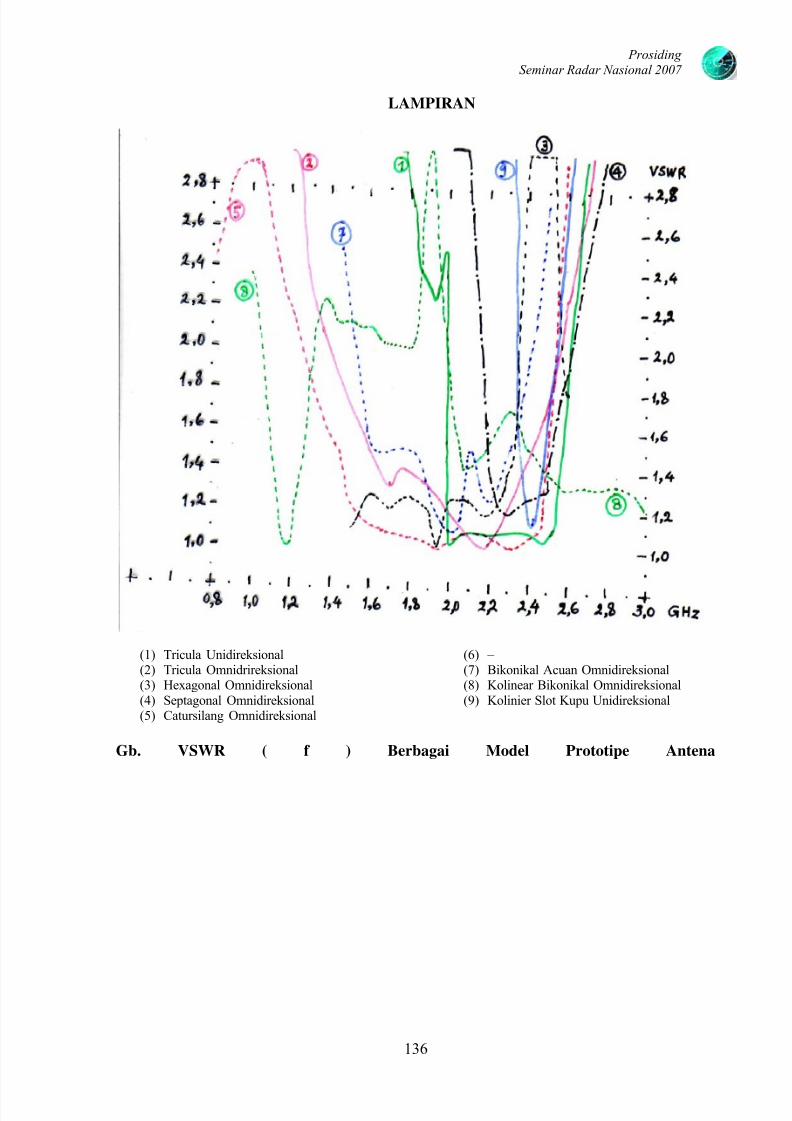
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 144/156
ProsidingSeminar Radar Nasional 2007
LAMPIRAN
(1) Tricula Unidireksional(2) Tricula Omnidrireksional(3) Hexagonal Omnidireksional(4) Septagonal Omnidireksional(5) Catursilang Omnidireksional
(6) –(7) Bikonikal Acuan Omnidireksional(8) Kolinear Bikonikal Omnidireksional(9) Kolinier Slot Kupu Unidireksional
Gb. VSWR ( f ) Berbagai Model Prototipe Antena
136
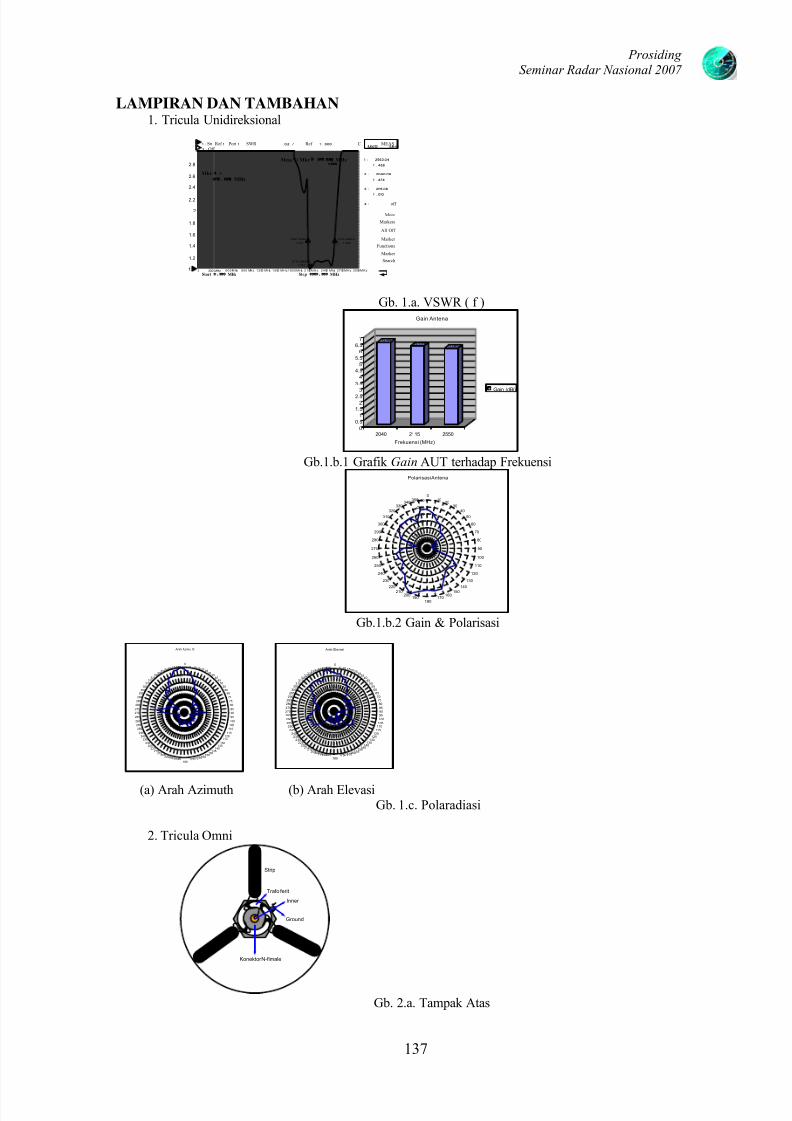
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 145/156
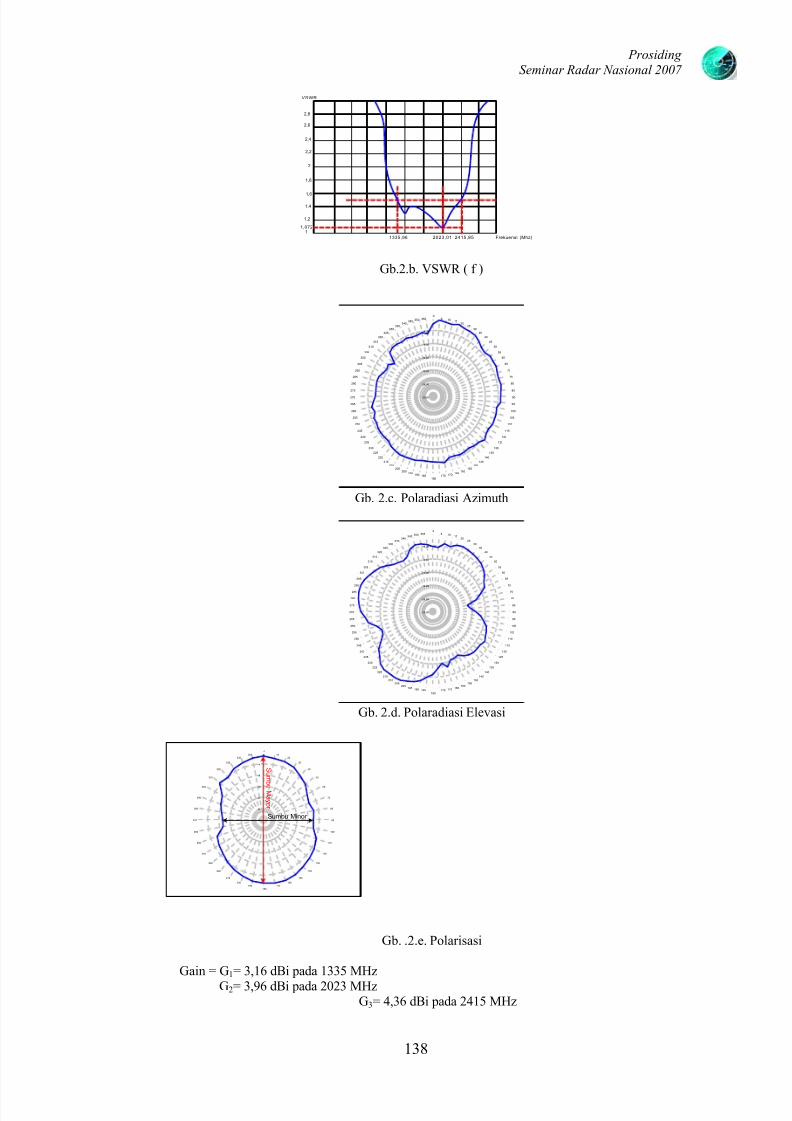
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 146/156
ProsidingSeminar Radar Nasional 2007
Gb.2.b. VSWR ( f )
Gb. 2.c. Polaradiasi Azimuth
Gb. 2.d. Polaradiasi Elevasi
Gb. .2.e. Polarisasi
Gain = G1 = 3,16 dBi pada 1335 MHz
G2 = 3,96 dBi pada 2023 MHzG3 = 4,36 dBi pada 2415 MHz
1
1,2
1,4
1,6
1,8
2
2,2
2,4
2,6
2,8
1335,96
-29,00
-24,00
-19,00
-14,00
-9,00
-4,00
05 10
1520
2530
35
40
45
50
55
60
65
70
75
80
85
90
95
100
105
110
115
120
125
130
135
140
145
150155
160165
170175180
185190195
200205
210
215
220
225
230
235
240
245
250
255
260
265
270
275
280
285
290
295
300
305
310
315
320
325
330335
340345
350 355
-29,00
-24,00
-19,00
-14,00
-9,00
-4,00
05 10 15
2025
30
35
40
45
50
55
60
65
70
75
80
85
90
95
100
105
110
115
120
125
130
135
140
145150
155160
165170175180
185190195200
205210
215
220
225
230
235
240
245
250
255
260
265
270
275
280
285
290
295
300
305
310
315
320
325
330335
340345 350 355
2023,01 2415,85
VSWR
Frekuensi (Mhz)
1,072
-29
-24
-19
-14
-9
-4
0
10
20
30
40
50
60
70
80
90
100
110
120
130
140
150
160
170
180
190
200
210
220
230
240
250
260
270
280
290
300
310
320
330
340
350
Sumbu Minor
S um
b uM a y or
138

8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 147/156
ProsidingSeminar Radar Nasional 2007
Peranan Radar Surveillance (PSR/SSR)
dalam Pelayanan Lalu Lintas Udara di Indonesia
dan ADS-B sebagai Sistem Alternatif
Abdullah Agus Ma’rufi *), Moch. Abdul Azis *)*) Airport and Air Traffic Services Technology PT. DIRGANTARA INDONESIA (PERSERO)
INDONESIAN AEROSPACE (IAe)GPT. Lt. 5 - Jl. Pajajaran 154 Bandung – 40174 INDONESIA
Phone : 022-6054289; Fax : 022-6054284e-mail : [email protected] , [email protected]
Abstract
The current status of the global Air Traffic Services (ATS) is evolutionary changing because of air traffic growththat generating development on the CNS/ATM (Communication, Navigation, Surveillance / Air Traffic Management) technology. This condition has been pushing to the regulations changing in aviation world. The
Surveillance Radar system (PSR/SSR) is essential equipments and have an important role in the ATS system. Existing condition of the Indonesian’s surveillance radar is growing old, therefore it is impacting to less optimal
of the ATS system. ADS-B (Automatic Dependent Surveillance Broadcast) provide an alternative solution for the surveillance system that complementary with radar, even has potential to radar technology replacement in orderto support Air Traffic Services.
Abstrak
Sistem pelayanan lalu lintas udara global sedang mengalami perubahan evolutif sebagai akibat dari pertumbuhan lalu lintas udara yang memicu perkembangan teknologiCNS/ATM (Cmmunication, Navigation,Surveillance / Air Traffic Management. Kondisi ini telah mendorong terjadinya perubahan regulasi di dunia penerbangan. Sistem Radar Surveillance (PSR/SSR) merupakan peralatan yang esensial dan berperan pentingdalam sistem pelayanan lalu lintas udara. Kondisi peralatan radar surveillance di Indonesia sudah tua,
sehingga berdampak pada pelayanan lalu lintas udara yang kurang optimal. Teknologi ADS-B(AutomaticDependent Surveillance Broadcast) memberikan solusi alternatif sistem surveillance yang
komplementer dengan radar bahkan berpotensi menggantikan teknologi radar untuk menunjang pelayanan lalulintas udara.
Kata Kunci : ATS, Radar, PSR, SSR, ADS-B, Surveillance, CNS/ATM, ruang udara, FIR
1. Pendahuluan
Indonesia adalah salah satu negara anggotaOrganisasi Penerbangan Sipil Internasional
(ICAO). Oleh karena itu, berbagai persyaratanyang berhubungan dengan sistem pengaturan penerbangan sipil, sebagaimana tercantum didalam dokumen Konvensi Chicago 1944 [1]dan Annex-nya, berikut dokumen teknik,dokumen operasional, dan konvensiinternasional lain yang terkait harus dipenuhisesuai dengan kepentingan nasional. Dalam halini, system pelayanan manajemen/pengendalian lalu lintas udara yang ditetapkanharus sesuai dengan peraturan / regulasi yangtercantum dalam dokumen ICAO tersebut.
Regulasi dunia penerbangan di dunia saatini sedang mengalami perubahan. Hal ini
sebagai akibat dari pertumbuhan jumlah lalulintas penerbangan yang cukup pesat namuntidak dapat diakomodasi oleh system pengendalian lalu lintas penerbangan eksisting
saat ini. Masalah ini selanjutnya memicu perkembangan teknologi, khususnya yang berkaitan dengan new
CNS/ATM(Communication, Navigation,
Surveillance / Air Traffic Management). ICAOmendefinisikan CNS/ATM sebagai sistemkomunikasi, navigasi, dan surveillance yangmenggunakan teknologi berbasis digital dandatalink, termasuk system satelit dengan berbagai tingkatan otomasi yang digunakanuntuk menunjang system manajemen lalulintas udara secara global dan seamless[2].
Implementasi CNS/ATM menjanjikan sistemmanajemen lalu lintas udara yang lebih
139
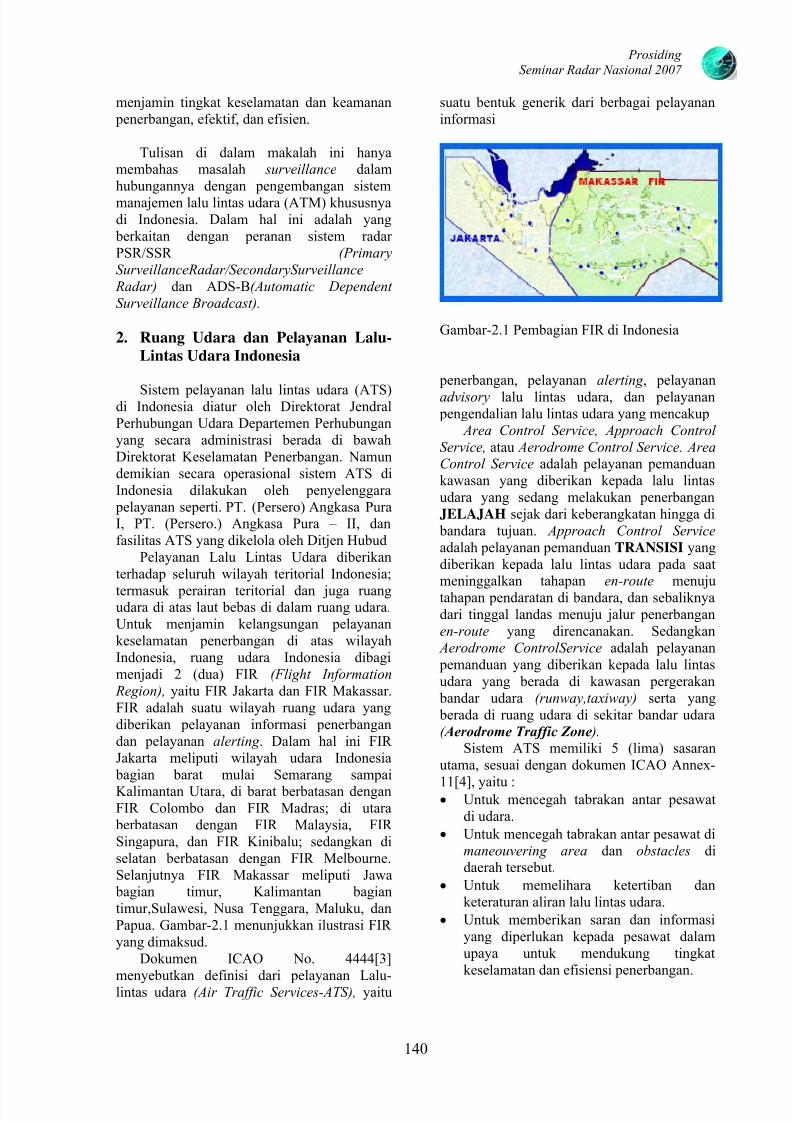
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 148/156
ProsidingSeminar Radar Nasional 2007
menjamin tingkat keselamatan dan keamanan penerbangan, efektif, dan efisien.
Tulisan di dalam makalah ini hanyamembahas masalah surveillance dalamhubungannya dengan pengembangan sistemmanajemen lalu lintas udara (ATM) khususnyadi Indonesia. Dalam hal ini adalah yang berkaitan dengan peranan sistem radarPSR/SSR (Primary
SurveillanceRadar/SecondarySurveillance
Radar) dan ADS-B(Automatic Dependent
Surveillance Broadcast).
2. Ruang Udara dan Pelayanan Lalu-
Lintas Udara Indonesia
Sistem pelayanan lalu lintas udara (ATS)di Indonesia diatur oleh Direktorat JendralPerhubungan Udara Departemen Perhubunganyang secara administrasi berada di bawahDirektorat Keselamatan Penerbangan. Namundemikian secara operasional sistem ATS diIndonesia dilakukan oleh penyelenggara pelayanan seperti. PT. (Persero) Angkasa PuraI, PT. (Persero.) Angkasa Pura – II, danfasilitas ATS yang dikelola oleh Ditjen Hubud
Pelayanan Lalu Lintas Udara diberikanterhadap seluruh wilayah teritorial Indonesia;
termasuk perairan teritorial dan juga ruangudara di atas laut bebas di dalam ruang udara.Untuk menjamin kelangsungan pelayanankeselamatan penerbangan di atas wilayahIndonesia, ruang udara Indonesia dibagimenjadi 2 (dua) FIR (Flight Information
Region), yaitu FIR Jakarta dan FIR Makassar.FIR adalah suatu wilayah ruang udara yangdiberikan pelayanan informasi penerbangandan pelayanan alerting . Dalam hal ini FIRJakarta meliputi wilayah udara Indonesia bagian barat mulai Semarang sampaiKalimantan Utara, di barat berbatasan denganFIR Colombo dan FIR Madras; di utara berbatasan dengan FIR Malaysia, FIRSingapura, dan FIR Kinibalu; sedangkan diselatan berbatasan dengan FIR Melbourne.Selanjutnya FIR Makassar meliputi Jawa bagian timur, Kalimantan bagiantimur,Sulawesi, Nusa Tenggara, Maluku, danPapua. Gambar-2.1 menunjukkan ilustrasi FIRyang dimaksud.
Dokumen ICAO No. 4444[3]
menyebutkan definisi dari pelayanan Lalu-lintas udara (Air Traffic Services-ATS), yaitu
suatu bentuk generik dari berbagai pelayananinformasi
Gambar-2.1 Pembagian FIR di Indonesia
penerbangan, pelayanan alerting , pelayanan
advisory lalu lintas udara, dan pelayanan pengendalian lalu lintas udara yang mencakup
Area Control Service, Approach Control Service, atau Aerodrome Control Service. Area
Control Service adalah pelayanan pemanduankawasan yang diberikan kepada lalu lintasudara yang sedang melakukan penerbanganJELAJAH sejak dari keberangkatan hingga di bandara tujuan. Approach Control Service
adalah pelayanan pemanduan TRANSISI yangdiberikan kepada lalu lintas udara pada saatmeninggalkan tahapan en-route menujutahapan pendaratan di bandara, dan sebaliknyadari tinggal landas menuju jalur penerbanganen-route yang direncanakan. Sedangkan
Aerodrome ControlService adalah pelayanan pemanduan yang diberikan kepada lalu lintasudara yang berada di kawasan pergerakan bandar udara (runway,taxiway) serta yang berada di ruang udara di sekitar bandar udara( Aerodrome Traffic Zone ).
Sistem ATS memiliki 5 (lima) sasaranutama, sesuai dengan dokumen ICAO Annex-
11[4], yaitu :• Untuk mencegah tabrakan antar pesawatdi udara.
• Untuk mencegah tabrakan antar pesawat dimaneouvering area dan obstacles didaerah tersebut.
• Untuk memelihara ketertiban danketeraturan aliran lalu lintas udara.
• Untuk memberikan saran dan informasiyang diperlukan kepada pesawat dalamupaya untuk mendukung tingkatkeselamatan dan efisiensi penerbangan.
140
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 149/156
ProsidingSeminar Radar Nasional 2007
• Untuk memberikan pengarahan kepada pesawat yang terlibat di dalam operasiSearch and Rescue.
Dalam hal ini, negara harus dapatmemberikan keyakinan bahwa tingkat pelayanan lalu lintas udara, dan sistemkomunikasi, navigasi, surveillance, serta prosedur ATS yang diaplikasikan pada ruangudara atau lingkungan bandar udara yangdimaksud, adalah tepat dan sesuai untukmempertahankan tingkat keselamatan (level
ofsafety) yang dapat diterima. Untukmemberikan keyakinan bahwa tingkatkeselamatan di daerah pelayanan lalu lintasudara sudah dipertahankan, maka pihakotoritas ATS harus mengimplementasikan
program manajemen keselamatan yang formaldan sistematik untuk pelayanan lalu lintasudara di bawah koridor hukum. Bahkan jikadipandang perlu sesuai dengan regulasi ICAO,maka program manajemen keselamatan ATSharus ditetapkan berdasarkan pada perjanjiannavigasi udaratingkat regional.
3. Sistem Surveillance
“Radio Technical Commission for
Aeronautics” (RTCA)[5] mendifinisikan “surveillance” sebagai proses deteksi, tracking,
mengetahui karakteristik pesawat, dan
mengobservasi pesawat, wahana, serta
fenomena cuaca untuk digunakan sebagai penuntun operasi-operasi penerbangan agar aman dan efisien.
Surveillance adalah fungsi kunci pada
sistem manajemen ruang udara karena secara
taktis dapat memberikan dukungan tingkat keyakinan separasi antar pesawat dan secara
strategis dapat melakukan perencanaan aliran
lalu lintas udara. Tujuan utama dari surveillance yang diinginkan di masa depan
adalah untuk memberikan dukungan fungsi manajemen ruang udara sebagai berikut[6] : a. Tingkat Keyakinan Separasi Jangka
PendekSurveillance memberikan informasi
mengenai status keadaan pesawat saat ini padadisplay controller sebagai input pada fungsiseparasi otomatis, misalnya : sistem Minimum
Safe Altitude Warning (MSAW) untuk
melakukan deteksi dini jika ada potensi pesawat akan menabrak gunung (potential
flight into terrain). Selanjutnya, di masa depan
surveillance akan memberikan fungsitambahan untuk monitoring konfirmasilintasan dalam arah lateral danvertikal, serta untuk melakukan pengecekanotomatis antara path intent versus path clearances. b. Tingkat Keyakinan Separasi Jangka
Menengah Surveillance saat ini berfungsimemberikan informasi keadaan untuk perencanaan ruang udara berdasarkan sektordan load management. Di masa depan,
surveillance akan memberikan fungsi otomatisuntuk melihat trend conflict probe pada jangkamenengah (sekitar 20 menit) ke depan(lookahead ). Hal ini berguna untuk mendeteksi potensi tabrakan antar pesawat di ruang udara.Fungsi otomasi ini akan memerlukan
peningkatan kemampuan surveillance dalamupaya untuk memberikan prediksi lintasanyang akurat dan dapat dipercaya untuk periodalookahead jangka menengah.c. Perencanaan Ruang Udara Jangka
MenengahDi masa depan, fungsi surveillance harus
dapat mendukung perencanaan aliran lalulintas udarajangka menengah dan sistemmanajemen keberangkatan dan kedatangan bandar udara pusat penyebaran (hub) yang padat dimana beban lalu lintas udara dapat
menyebabkan aliran lalu lintas udara menjaditidak efisien dan jenuh.d. Manajemen Aliran dan Perencanaan
Jangka Panjang / StrategisSalah satu tujuan dari sistem manajemen
aliran ruang udara masa depan adalah transisidari sistem keberangkatan yang di-managed
kepada sistem kedatangan yang di-managed .Fungsi surveillance untuk mendukungmanajemen aliran ruang udara yang strategisadalah dengan memberikan status yang akuratdan informasi intent untuk melakukan prediksi
jangka panjang. Kendali otomatis aliran lalulintas en-route seperti sektor dinamismemerlukan prediksi lintasan yang akuratuntuk analisis beban sektor dan manajemenaliran.
Pada intinya, sistem surveillance
merupakan suatu elemen yang esensial dalamsetiap-operasi manajemen lalu lintas udarayang terintegrasi (Integrated Air Traffic
Management - ATM). Sistem surveillance yangdiinginkan di masa depan adalah sistem yangmampu untuk melakukan ekstraksi berbagai parameter penerbangan yang akanmeningkatkan kinerja ATM dan mampu
141
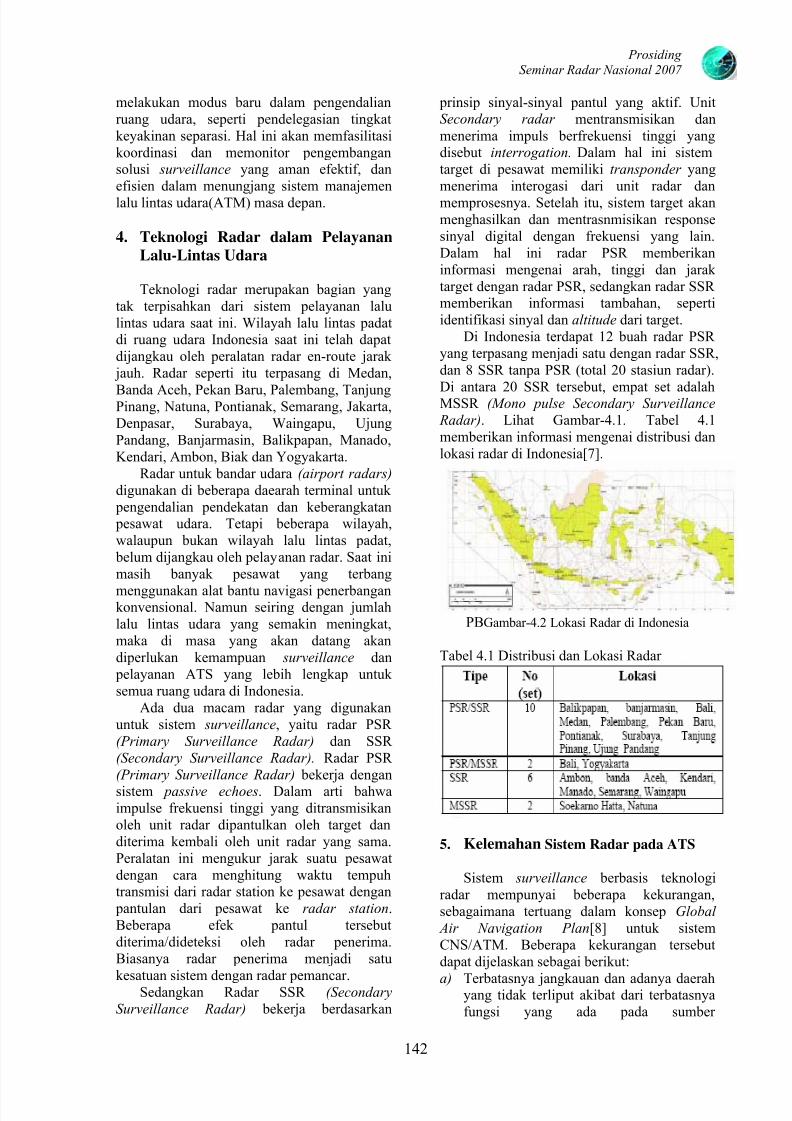
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 150/156
ProsidingSeminar Radar Nasional 2007
melakukan modus baru dalam pengendalianruang udara, seperti pendelegasian tingkatkeyakinan separasi. Hal ini akan memfasilitasikoordinasi dan memonitor pengembangansolusi surveillance yang aman efektif, danefisien dalam menungjang sistem manajemenlalu lintas udara(ATM) masa depan.
4. Teknologi Radar dalam Pelayanan
Lalu-Lintas Udara
Teknologi radar merupakan bagian yangtak terpisahkan dari sistem pelayanan lalulintas udara saat ini. Wilayah lalu lintas padatdi ruang udara Indonesia saat ini telah dapatdijangkau oleh peralatan radar en-route jarak jauh. Radar seperti itu terpasang di Medan,
Banda Aceh, Pekan Baru, Palembang, TanjungPinang, Natuna, Pontianak, Semarang, Jakarta,Denpasar, Surabaya, Waingapu, UjungPandang, Banjarmasin, Balikpapan, Manado,Kendari, Ambon, Biak dan Yogyakarta.
Radar untuk bandar udara (airport radars)
digunakan di beberapa daearah terminal untuk pengendalian pendekatan dan keberangkatan pesawat udara. Tetapi beberapa wilayah,walaupun bukan wilayah lalu lintas padat, belum dijangkau oleh pelayanan radar. Saat inimasih banyak pesawat yang terbang
menggunakan alat bantu navigasi penerbangankonvensional. Namun seiring dengan jumlahlalu lintas udara yang semakin meningkat,maka di masa yang akan datang akandiperlukan kemampuan surveillance dan pelayanan ATS yang lebih lengkap untuksemua ruang udara di Indonesia.
Ada dua macam radar yang digunakanuntuk sistem surveillance, yaitu radar PSR(Primary Surveillance Radar) dan SSR(Secondary Surveillance Radar). Radar PSR(Primary Surveillance Radar) bekerja dengansistem passive echoes. Dalam arti bahwaimpulse frekuensi tinggi yang ditransmisikanoleh unit radar dipantulkan oleh target danditerima kembali oleh unit radar yang sama.Peralatan ini mengukur jarak suatu pesawatdengan cara menghitung waktu tempuhtransmisi dari radar station ke pesawat dengan pantulan dari pesawat ke radar station.Beberapa efek pantul tersebutditerima/dideteksi oleh radar penerima.Biasanya radar penerima menjadi satu
kesatuan sistem dengan radar pemancar.Sedangkan Radar SSR (Secondary Surveillance Radar) bekerja berdasarkan
prinsip sinyal-sinyal pantul yang aktif. UnitSecondary radar mentransmisikan danmenerima impuls berfrekuensi tinggi yangdisebut interrogation. Dalam hal ini sistemtarget di pesawat memiliki transponder yangmenerima interogasi dari unit radar danmemprosesnya. Setelah itu, sistem target akanmenghasilkan dan mentrasnmisikan responsesinyal digital dengan frekuensi yang lain.Dalam hal ini radar PSR memberikaninformasi mengenai arah, tinggi dan jaraktarget dengan radar PSR, sedangkan radar SSRmemberikan informasi tambahan, sepertiidentifikasi sinyal dan altitude dari target.
Di Indonesia terdapat 12 buah radar PSRyang terpasang menjadi satu dengan radar SSR,dan 8 SSR tanpa PSR (total 20 stasiun radar).
Di antara 20 SSR tersebut, empat set adalahMSSR (Mono pulse Secondary Surveillance
Radar). Lihat Gambar-4.1. Tabel 4.1memberikan informasi mengenai distribusi danlokasi radar di Indonesia[7].
PBGambar-4.2 Lokasi Radar di Indonesia
Tabel 4.1 Distribusi dan Lokasi Radar
5. Kelemahan Sistem Radar pada ATS
Sistem surveillance berbasis teknologiradar mempunyai beberapa kekurangan,sebagaimana tertuang dalam konsep Global
Air Navigation Plan[8] untuk sistemCNS/ATM. Beberapa kekurangan tersebutdapat dijelaskan sebagai berikut:
a)
Terbatasnya jangkauan dan adanya daerahyang tidak terliput akibat dari terbatasnyafungsi yang ada pada sumber
142

8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 151/156
ProsidingSeminar Radar Nasional 2007
sensor (Primary and Secondary
Surveillance Radar). Termasuk didalamnya adalah tidak terliputnya areaantar Trans Oceanic, tidak terliputnya pesawat dalam kondisi terbang rendah,tidak terliputnya wahana Surface
Movement , munculnya efek Silence Cones,dan efek Blind Area, dsb. Dimana pada beberapa kasus, seperti misalnya padadaerah Trans Oceanic,keputusankeputusan pada Air Traffic
Control membutuhkan informasi-informasiuntuk pengendalian lalu-lintas udara hanya berdasarkan laporan-laporan denganmenggunakan Voice Report lewat radiokomunikasi dari dan ke ATC . b)Adanya penggunaan Mechanical Rotation pada
antenna radar, serta adanya periode Scanning Antenna yang tidak sesuaidengan kebutuhan, serta ketidak-mungkinan mengadaptasi Reporting Rate
yang dibutuhkan oleh ATC. b) Terjadinya efek Garbling , sehingga
hasilnya tidak optimal dan kurang bagus,atau pada kasus tertentu bahkan dapat jugakehilangan target pesawat.
c) Tidak tersedianya data dan informasi yangada di pesawat melebihi data yangditransmisikan, yaitu hanya Mode A and
Mode C (Mode Identifikasi dan Altitude).d) Tidak adanya kemampuan untuk
dioperasikan secara bersama dengansistem lain, karena peralatan yang beroperasi sekarang mempunyaikemampuan dan performansi yang berbedaantar peralatan tersebut.
e) Kekurangan jumlah kemungkinan fungsi pengkodean Mode-A (hanya 4096kemungkinan) dan sering terjadinya penggantian kode selama terbang akibat peraturan-peraturan di wilayah tersebut,
serta kemungkinan terjadinya duplikasi pengkodean dengan pesawat lain.
f) Kurang mampunya sistem untukmendukung aplikasi-aplikasi penerbanganke depan, karena tidak tersedianya data“surveillance” pada cockpit “aircrew” dalam bentuk direct monitor.
g) Kurang mampunya sistem untukmendukung aplikasi “Surface Surveillance”.
Akibat dari berbagai permasalahantersebut di atas dan adanya kendala biayauntuk pengadaan peralatan radar baru, serta
ditambah pula dengan dibutuhkannya berbagai persyaratan yang menyangkut tingkat kapasitas,fleksibilitas, dan efisiensi untuk mengantisipasikemungkinan pertumbuhan lalu-lintas udara,yang tidak cukup hanya mengandalkankemampuan sistem surveillance yang adasekarang. Maka untuk menanggulangi berbagaiketerbatasan dan kekurangan tersebut,Indonesia harus memikirkan langkah-langkahstrategis untuk pengembangan danimplementasi teknologi surveillance di masadepan.
Ada beberapa strategi pengembanganteknologi surveillance, antara lain SSR Mode-S dengan “enhanced services”, Automatic
Dependent Surveillance-Addressed
(ADSAddressed - ADS-A) atau ADS – Contract
(ADS-C), dan ADS - Broadcast (ADS-B). Dengan adanya strategi pengembanganteknologi ini diharapkan dapat menutupi danmenanggulangi keterbatasan-keterbatasanfungsi ATS yang berbasis pada sistem
surveillance yang sudah ada.
6. Implementasi Teknologi ADS-B
Sistem surveillance baru, ADS-Bmemberikan alternatif terhadap potensiinvestasi teknologi radar yang bernilai jutaan
dolar. Penggunaan teknologi ADS-Bmemungkinkan penghematan sampai sekitar90% dalam pembelian dan ongkos pemeliharaan. Hal ini akan secara signifikanmereduksi tekanan pada penambahan biaya pelayanan lalu lintas udara.
“Automatic Dependent Surveillance”
(ADS) didefinisikan sebagai[8] proses pengolahan dan pengiriman pesan, termasuk pesan posisi dari pengirim dan berbagaiinformasi surveillance lainnya seperti :kecepatan, tujuan dan identitas terbang.
Informasi ini digunakan oleh pesawat terbanguntuk mengatur dan merubah informasi penuh penggunaan teknologi ADS-B sebagaikomponen penunjang sistem CNS/ATM dimasa depan.
Berdasarkan RTCA DO-242[5], ADS-Bdipergunakan di pesawat atau wahana darat(surface vehicle) dengan menggunakanwilayah ruang udara dan permukaan daratuntuk pergerakannya. Dalam hal ini pesawatdan wahana darat tersebut memancarkan sinyalyang berisi data-data state vector (posisihorisontal/vertikal, dan kecepatan horisontal/
143
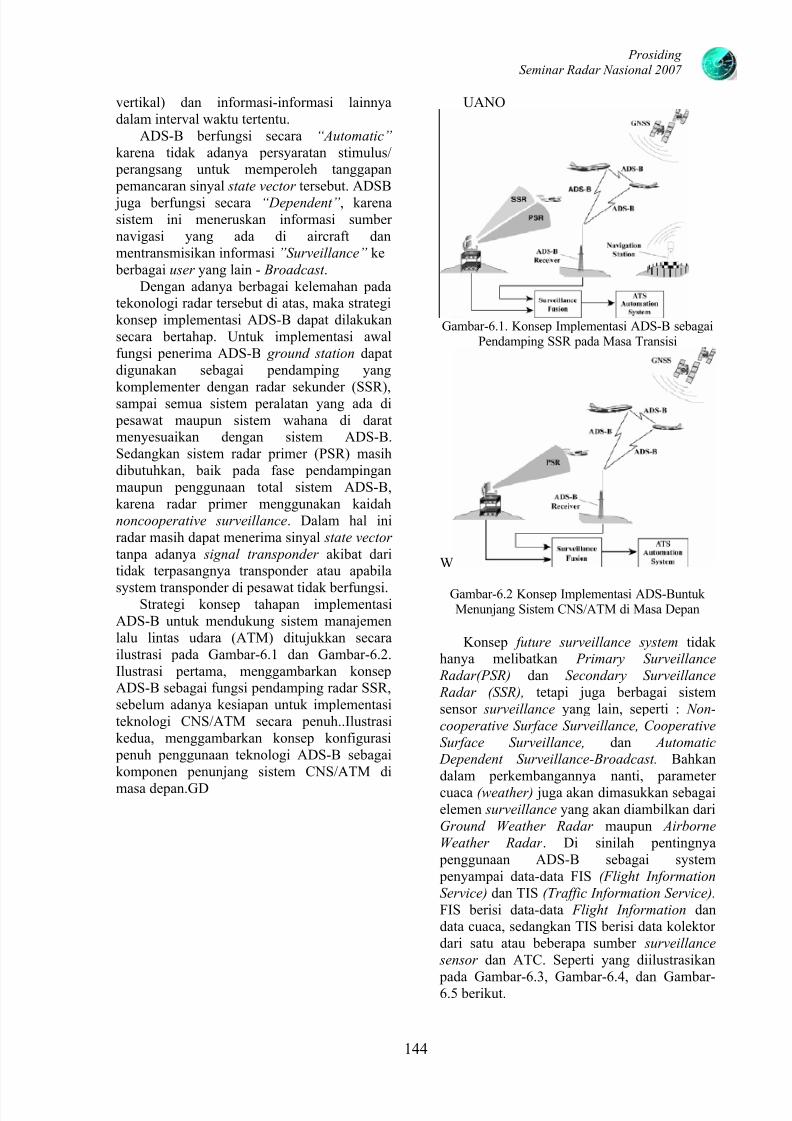
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 152/156
ProsidingSeminar Radar Nasional 2007
vertikal) dan informasi-informasi lainnyadalam interval waktu tertentu.
ADS-B berfungsi secara “Automatic”
karena tidak adanya persyaratan stimulus/ perangsang untuk memperoleh tanggapan pemancaran sinyal state vector tersebut. ADSB juga berfungsi secara “Dependent”, karenasistem ini meneruskan informasi sumbernavigasi yang ada di aircraft danmentransmisikan informasi ”Surveillance” ke berbagai user yang lain - Broadcast .
Dengan adanya berbagai kelemahan padatekonologi radar tersebut di atas, maka strategikonsep implementasi ADS-B dapat dilakukansecara bertahap. Untuk implementasi awalfungsi penerima ADS-B ground station dapatdigunakan sebagai pendamping yang
komplementer dengan radar sekunder (SSR),sampai semua sistem peralatan yang ada di pesawat maupun sistem wahana di daratmenyesuaikan dengan sistem ADS-B.Sedangkan sistem radar primer (PSR) masihdibutuhkan, baik pada fase pendampinganmaupun penggunaan total sistem ADS-B,karena radar primer menggunakan kaidahnoncooperative surveillance. Dalam hal iniradar masih dapat menerima sinyal state vector
tanpa adanya signal transponder akibat daritidak terpasangnya transponder atau apabila
system transponder di pesawat tidak berfungsi.Strategi konsep tahapan implementasi
ADS-B untuk mendukung sistem manajemenlalu lintas udara (ATM) ditujukkan secarailustrasi pada Gambar-6.1 dan Gambar-6.2.Ilustrasi pertama, menggambarkan konsepADS-B sebagai fungsi pendamping radar SSR,sebelum adanya kesiapan untuk implementasiteknologi CNS/ATM secara penuh..Ilustrasikedua, menggambarkan konsep konfigurasi penuh penggunaan teknologi ADS-B sebagaikomponen penunjang sistem CNS/ATM di
masa depan.GD
UANO
Gambar-6.1. Konsep Implementasi ADS-B sebagai
Pendamping SSR pada Masa Transisi
W
Gambar-6.2 Konsep Implementasi ADS-Buntuk Menunjang Sistem CNS/ATM di Masa Depan
Konsep future surveillance system tidak hanya melibatkan Primary Surveillance
Radar(PSR) dan Secondary Surveillance
Radar (SSR), tetapi juga berbagai sistemsensor surveillance yang lain, seperti : Non-
cooperative Surface Surveillance, Cooperative
Surface Surveillance, dan Automatic
Dependent Surveillance-Broadcast. Bahkandalam perkembangannya nanti, parametercuaca (weather) juga akan dimasukkan sebagaielemen surveillance yang akan diambilkan dariGround Weather Radar maupun Airborne
Weather Radar . Di sinilah pentingnya penggunaan ADS-B sebagai system penyampai data-data FIS (Flight Information Service) dan TIS (Traffic Information Service).
FIS berisi data-data Flight Information dandata cuaca, sedangkan TIS berisi data kolektordari satu atau beberapa sumber surveillance
sensor dan ATC. Seperti yang diilustrasikan
pada Gambar-6.3, Gambar-6.4, dan Gambar-6.5 berikut.
144
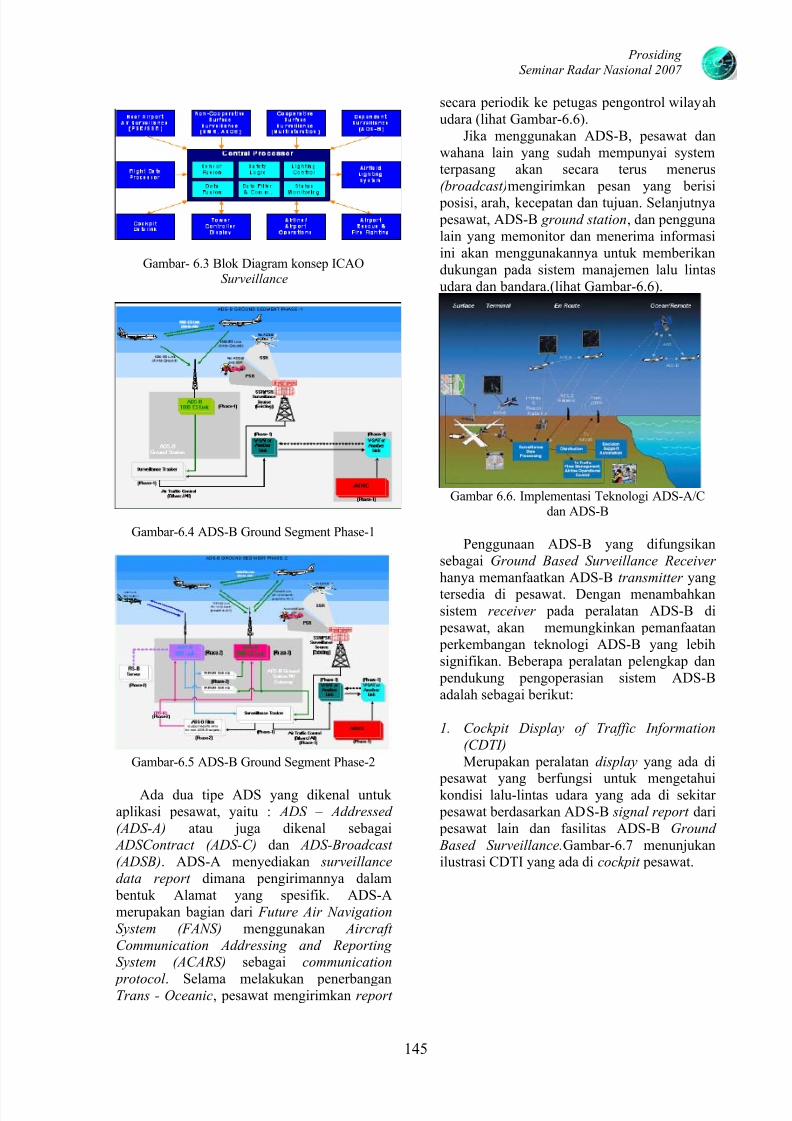
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 153/156
ProsidingSeminar Radar Nasional 2007
Gambar- 6.3 Blok Diagram konsep ICAOSurveillance
Gambar-6.4 ADS-B Ground Segment Phase-1
Gambar-6.5 ADS-B Ground Segment Phase-2
Ada dua tipe ADS yang dikenal untukaplikasi pesawat, yaitu : ADS – Addressed
(ADS-A) atau juga dikenal sebagai ADSContract (ADS-C) dan ADS-Broadcast
(ADSB). ADS-A menyediakan surveillance
data report dimana pengirimannya dalam bentuk Alamat yang spesifik. ADS-Amerupakan bagian dari Future Air Navigation
System (FANS) menggunakan Aircraft
Communication Addressing and Reporting
System (ACARS) sebagai communication
protocol . Selama melakukan penerbanganTrans - Oceanic, pesawat mengirimkan report
secara periodik ke petugas pengontrol wilayahudara (lihat Gambar-6.6).
Jika menggunakan ADS-B, pesawat dan
wahana lain yang sudah mempunyai systemterpasang akan secara terus menerus(broadcast)mengirimkan pesan yang berisi posisi, arah, kecepatan dan tujuan. Selanjutnya pesawat, ADS-B ground station, dan penggunalain yang memonitor dan menerima informasiini akan menggunakannya untuk memberikandukungan pada sistem manajemen lalu lintasudara dan bandara.(lihat Gambar-6.6).
Gambar 6.6. Implementasi Teknologi ADS-A/Cdan ADS-B
Penggunaan ADS-B yang difungsikansebagai Ground Based Surveillance Receiver hanya memanfaatkan ADS-B transmitter yang
tersedia di pesawat. Dengan menambahkansistem receiver pada peralatan ADS-B di pesawat, akan memungkinkan pemanfaatan perkembangan teknologi ADS-B yang lebihsignifikan. Beberapa peralatan pelengkap dan pendukung pengoperasian sistem ADS-Badalah sebagai berikut:
1.
Cockpit Display of Traffic Information
(CDTI)
Merupakan peralatan display yang ada di
pesawat yang berfungsi untuk mengetahuikondisi lalu-lintas udara yang ada di sekitar pesawat berdasarkan ADS-B signal report dari pesawat lain dan fasilitas ADS-B Ground Based Surveillance.Gambar-6.7 menunjukanilustrasi CDTI yang ada di cockpit pesawat.
145
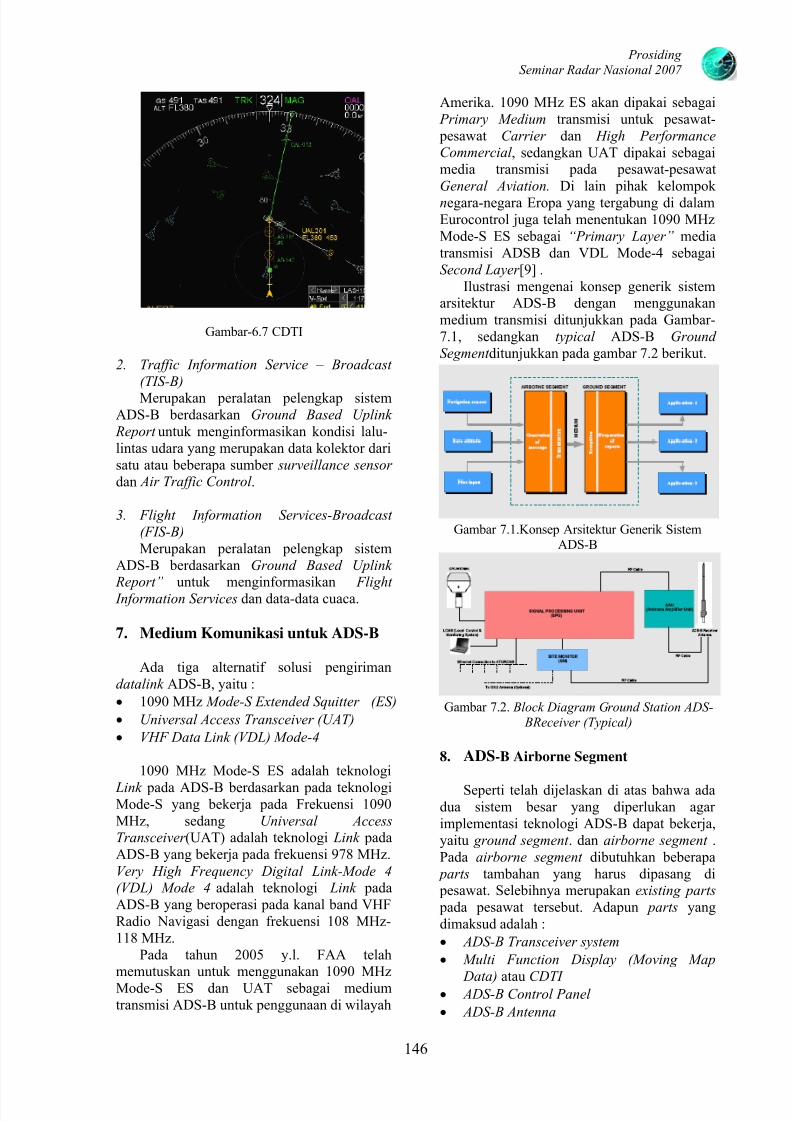
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 154/156
ProsidingSeminar Radar Nasional 2007
Gambar-6.7 CDTI
2. Traffic Information Service – Broadcast
(TIS-B)
Merupakan peralatan pelengkap sistemADS-B berdasarkan Ground Based Uplink
Report untuk menginformasikan kondisi lalu-lintas udara yang merupakan data kolektor darisatu atau beberapa sumber surveillance sensor
dan Air Traffic Control .
3.
Flight Information Services-Broadcast
(FIS-B)
Merupakan peralatan pelengkap sistemADS-B berdasarkan Ground Based Uplink
Report” untuk menginformasikan Flight Information Services dan data-data cuaca.
7. Medium Komunikasi untuk ADS-B
Ada tiga alternatif solusi pengirimandatalink ADS-B, yaitu :
• 1090 MHz Mode-S Extended Squitter (ES)
• Universal Access Transceiver (UAT)
• VHF Data Link (VDL) Mode-4
1090 MHz Mode-S ES adalah teknologi
Link pada ADS-B berdasarkan pada teknologiMode-S yang bekerja pada Frekuensi 1090MHz, sedang Universal Access
Transceiver (UAT) adalah teknologi Link padaADS-B yang bekerja pada frekuensi 978 MHz.Very High Frequency Digital Link-Mode 4
(VDL) Mode 4 adalah teknologi Link padaADS-B yang beroperasi pada kanal band VHFRadio Navigasi dengan frekuensi 108 MHz-118 MHz.
Pada tahun 2005 y.l. FAA telahmemutuskan untuk menggunakan 1090 MHzMode-S ES dan UAT sebagai mediumtransmisi ADS-B untuk penggunaan di wilayah
Amerika. 1090 MHz ES akan dipakai sebagai Primary Medium transmisi untuk pesawat- pesawat Carrier dan High Performance
Commercial , sedangkan UAT dipakai sebagaimedia transmisi pada pesawat-pesawatGeneral Aviation. Di lain pihak kelompoknegara-negara Eropa yang tergabung di dalamEurocontrol juga telah menentukan 1090 MHzMode-S ES sebagai “Primary Layer” mediatransmisi ADSB dan VDL Mode-4 sebagaiSecond Layer [9] .
Ilustrasi mengenai konsep generik sistemarsitektur ADS-B dengan menggunakanmedium transmisi ditunjukkan pada Gambar-7.1, sedangkan typical ADS-B Ground
Segment ditunjukkan pada gambar 7.2 berikut.
Gambar 7.1.Konsep Arsitektur Generik SistemADS-B
Gambar 7.2. Block Diagram Ground Station ADS- BReceiver (Typical)
8. ADS-B Airborne Segment
Seperti telah dijelaskan di atas bahwa adadua sistem besar yang diperlukan agarimplementasi teknologi ADS-B dapat bekerja,yaitu ground segment . dan airborne segment .Pada airborne segment dibutuhkan beberapa
parts tambahan yang harus dipasang di pesawat. Selebihnya merupakan existing parts pada pesawat tersebut. Adapun parts yangdimaksud adalah :
• ADS-B Transceiver system
• Multi Function Display (Moving Map
Data) atau CDTI• ADS-B Control Panel
• ADS-B Antenna
146
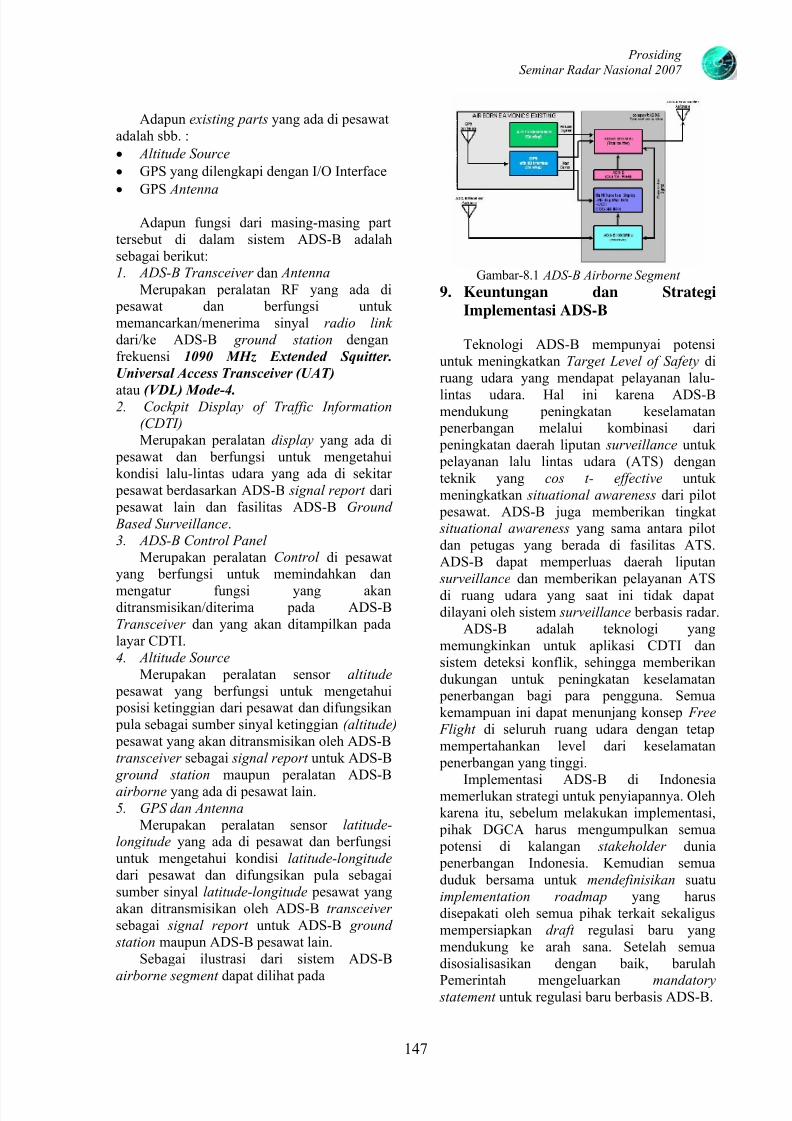
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 155/156
ProsidingSeminar Radar Nasional 2007
Adapun existing parts yang ada di pesawatadalah sbb. :
• Altitude Source
• GPS yang dilengkapi dengan I/O Interface
• GPS Antenna
Adapun fungsi dari masing-masing parttersebut di dalam sistem ADS-B adalahsebagai berikut:1.
ADS-B Transceiver dan Antenna
Merupakan peralatan RF yang ada di pesawat dan berfungsi untukmemancarkan/menerima sinyal radio link
dari/ke ADS-B ground station denganfrekuensi 1090 MHz Extended Squitter.
Universal Access Transceiver (UAT)
atau (VDL) Mode-4.2.
Cockpit Display of Traffic Information
(CDTI)
Merupakan peralatan display yang ada di pesawat dan berfungsi untuk mengetahuikondisi lalu-lintas udara yang ada di sekitar pesawat berdasarkan ADS-B signal report dari pesawat lain dan fasilitas ADS-B Ground Based Surveillance.3.
ADS-B Control Panel
Merupakan peralatan Control di pesawatyang berfungsi untuk memindahkan dan
mengatur fungsi yang akanditransmisikan/diterima pada ADS-BTransceiver dan yang akan ditampilkan padalayar CDTI.4.
Altitude Source
Merupakan peralatan sensor altitude
pesawat yang berfungsi untuk mengetahui posisi ketinggian dari pesawat dan difungsikan pula sebagai sumber sinyal ketinggian (altitude) pesawat yang akan ditransmisikan oleh ADS-Btransceiver sebagai signal report untuk ADS-B
ground station maupun peralatan ADS-Bairborne yang ada di pesawat lain.5.
GPS dan Antenna
Merupakan peralatan sensor latitude-
longitude yang ada di pesawat dan berfungsiuntuk mengetahui kondisi latitude-longitude
dari pesawat dan difungsikan pula sebagaisumber sinyal latitude-longitude pesawat yangakan ditransmisikan oleh ADS-B transceiver
sebagai signal report untuk ADS-B ground
station maupun ADS-B pesawat lain. Sebagai ilustrasi dari sistem ADS-B
airborne segment dapat dilihat pada
Gambar-8.1 ADS-B Airborne Segment
9. Keuntungan dan Strategi
Implementasi ADS-B
Teknologi ADS-B mempunyai potensiuntuk meningkatkan Target Level of Safety diruang udara yang mendapat pelayanan lalu-
lintas udara. Hal ini karena ADS-Bmendukung peningkatan keselamatan penerbangan melalui kombinasi dari peningkatan daerah liputan surveillance untuk pelayanan lalu lintas udara (ATS) denganteknik yang cos t- effective untukmeningkatkan situational awareness dari pilot pesawat. ADS-B juga memberikan tingkat situational awareness yang sama antara pilotdan petugas yang berada di fasilitas ATS.ADS-B dapat memperluas daerah liputan
surveillance dan memberikan pelayanan ATSdi ruang udara yang saat ini tidak dapatdilayani oleh sistem surveillance berbasis radar.
ADS-B adalah teknologi yangmemungkinkan untuk aplikasi CDTI dansistem deteksi konflik, sehingga memberikandukungan untuk peningkatan keselamatan penerbangan bagi para pengguna. Semuakemampuan ini dapat menunjang konsep Free
Flight di seluruh ruang udara dengan tetapmempertahankan level dari keselamatan penerbangan yang tinggi.
Implementasi ADS-B di Indonesiamemerlukan strategi untuk penyiapannya. Olehkarena itu, sebelum melakukan implementasi, pihak DGCA harus mengumpulkan semua potensi di kalangan stakeholder dunia penerbangan Indonesia. Kemudian semuaduduk bersama untuk mendefinisikan suatuimplementation roadmap yang harusdisepakati oleh semua pihak terkait sekaligusmempersiapkan draft regulasi baru yangmendukung ke arah sana. Setelah semuadisosialisasikan dengan baik, barulah
Pemerintah mengeluarkan mandatory statement untuk regulasi baru berbasis ADS-B.
147
8/18/2019 Prosiding.seminar.radar.nasional.
http://slidepdf.com/reader/full/prosidingseminarradarnasional 156/156
ProsidingSeminar Radar Nasional 2007
10. Kesimpulan
1. Lalu lintas udara di ruang udara Indonesiamengalami peningkatan. Oleh karena itudiperlukan sistem manajemen lalu lintas
udara yang mengacu pada perkembanganteknologi CNS/ATM.2. Radar PSR/SSR merupakan peralatan
surveillance yang berperanan pentingdalam sistem pelayanan lalu lintas udara.
3. Kondisi peralatan radar di Indonesia sudah banyak yang berusia tua. Di samping itusistem radar juga mempunyai beberapakelemahan yang akan berpengaruh padasistem pelayanan lalu lintas udara.
4. ADS-B merupakan sistem alternatif yangdapat digunakan sebagai sistem
pendamping yang komplementer atau bahkan berpotensi sebagai sistem pengganti radar SSR di masa depan
5. Implementasi ADS-B memerlukan penyiapan dua sistem besar, yaitu ground
segment dan airborne segment . Untuk itudiperlukan strategi dan roadmap
implementasi ADS-B yang jelas denganmelibatkan partisipasi aktif dari seluruh
stakeholder dunia penerbangan diIndonesia.
kepada Bp. Harjoso (PT. Angkasa Pura I) danBp. Wiyono (PT. Angkasa Pura II ) atasupdate informasi yang diberikan dalam rangka penyusunan tulisan ini.
12. Daftar Pustaka
[1] ICAO, “Convention on International Civil
Aviation“, Doc 7300/8, Eight Edition,2000.
[2] CANSO, ” Demistifying CNS/ATM ”,CANSO CNS/ATM Working Group, FinalVersion , June 1999.
[3] ICAO, ” Air Traffic Management ”:, Doc.4444, ATM/501, Fourteenth Edition., 2001
[4] ICAO Doc Annex 11, “Air TrafficServices”.
[5] RTCA DO 242, ‘Minimum AviationSystem Performance Standards forAutomatic Dependent SurveillanceBroadcast(ADS-B).
[6] Dottir, Aslaug Haralds, ‘ Air Traffic
Management Concept Baseline Definition,
Boeing Commercial Airplane Group’, Nextor Report #RR-97-3, October 31,1997.
[7] JICA Report, Studi Rencana Induk tentangKebijakan Strategis Sektor AngkutanUdara Indonesia di Republik Indonesia,