projeto hidrÁulico da unidade integrada de … · 2016-10-10 · 3.6 válvulas ... 6.5 motor...
TRANSCRIPT

PROJETO HIDRÁULICO DA UNIDADE INTEGRADA DE JATEAMENTO
Gabriel Bizzo Sotomayor
Projeto de graduação apresentado ao Curso de
Engenharia Mecânica da Escola Politécnica, da
Universidade Federal do Rio de Janeiro, como parte
dos requisitos necessários à obtenção do título de
Engenheiro.
Orientador: Reinaldo de Falco
Rio de Janeiro
Setembro de 2016
ii
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
Departamento de Engenharia Mecânica
DEM/POLI/UFRJ
PROJETO HIDRÁULICO DA UNIDADE INTEGRADA DE JATEAMENTO
Gabriel Bizzo Sotomayor
PROJETO DE GRADUAÇÃO SUBMETIDO AO CORPO DOCENTE DO CURSO DE
ENGENHARIA MECÂNICA DA ESCOLA POLITÉCNICA DA UNIVERSIDADE FEDERAL
DO RIO DE JANEIRO COMO PARTE DOS REQUISITOS NECESSÁRIOS PARA A
OBTENÇÃO DO GRAU DE ENGENHEIRO MECÂNICO.
Aprovado por:
_____________________________________
Prof. Reinaldo de Falco, M.Sc.
_____________________________________
Prof. Jules Ghislain Slama, D.Sc.
_____________________________________
Prof. Fábio Luiz Zamberlan, D.Sc
RIO DE JANEIRO, RJ – BRASIL
SETEMBRO de 2016

iii
Sotomayor, Gabriel Bizzo
PROJETO HIDRÁULICO DA UNIDADE
INTEGRADA DE JATEAMENTO/ Gabriel Bizzo Sotomayor. –
Rio de Janeiro: UFRJ/ Escola Politécnica, 2016.
X, 91 p.: il.; 29,7 cm
Orientador: Reinaldo de Falco
Projeto de Graduação – UFRJ/ Escola Politécnica/ Curso
de Engenharia Mecânica, 2016.
Referências Bibliográficas: p. 91.
1.Hidráulica. 2. Equipamentos Hidráulicos. 3.Perda de
Carga. I. De Falco, Reinaldo. II. Universidade Federal do Rio de
Janeiro, Escola Politécnica, Curso de Engenharia Mecânica. III.
Projeto Hidráulico da Unidade Integrada de Jateamento.

iv
À minha família.

v
Agradecimentos
À toda minha família, em especial, aos meus pais, Gabriel Paulo Gutierrez Sotomayor e
Marilucia Bizzo de Pinho, e ao meu irmão, Hugo Bizzo Sotomayor por acreditarem no meu
potencial e por me apoiarem por toda a minha vida.
À minha namorada Gabriella Soares e aos meus amigos que me acompanharam durante
toda esta jornada, em especial, ao Pedro Abreu.
Ao meu orientador Reinaldo de Falco pelo permanente apoio, e sobretudo, pela sabedoria
com que encaminhou a execução deste trabalho.

vi
Resumo do Projeto de Graduação apresentado à Escola Politécnica/ UFRJ como parte dos
requisitos necessários para obtenção do grau de Engenheiro Mecânico.
PROJETO HIDRÁULICO DA UNIDADE INTEGRADA DE JATEAMENTO
Gabriel Bizzo Sotomayor
Setembro/2016
Orientador: Reinaldo de Falco
Curso: Engenharia Mecânica
Poços de petróleo durante seu ciclo produtivo exigem periodicamente o uso de
equipamentos para a manutenção da produção. Estes equipamentos devem, preferencialmente,
utilizar equipamentos com histórico de baixo índice de manutenção, que impacta os aspectos
econômicos da produção de petróleo em campos terrestres. Nesse contexto, este trabalho apresenta
todas etapas envolvidas no projeto de um circuito hidráulico para unidade de jateamento integrada.
Após a apresentação dos conceitos básicos relacionados a teoria da hidráulica, incluindo a
descrição dos principais componentes hidráulicos, são descritos os requisitos do projeto para o
circuito hidráulico de cada sistema da unidade de jateamento integrada. A partir destes requisitos
são apresentados, para cada um dos sistemas, os diagramas dos circuitos hidráulicos e cálculos para
seleção dos equipamentos. Por fim o trabalho conclui que a integração dos três circuitos hidráulicos
apresentou uma oportunidade de otimização na solução de engenharia e demonstrou ser viável
tecnicamente.
Palavras-chave: Equipamentos hidráulicos, hidráulica, jateamento, perda de carga, motores,
bombas, válvulas

vii
Abstract of Undergraduate Project presented to POLI/UFRJ as a partial fulfillment of the
requirements for the degree of Mechanical Engineer.
HYDRAULIC PROJECT OF INTEGRATED JETTING UNIT
Gabriel Bizzo Sotomayor
September/2016
Advisor: Reinaldo de Falco
Course: Mechanical Engineering
Oil wells during their production cycle periodically require the use of equipment for the
maintenance of production. These devices should preferably use equipment with a history of low
maintenance, which impacts the economics of oil production in onshore fields. In this context, this
work presents all steps involved in the design of a hydraulic circuit for integrated jetting unit. After
the presentation of the basic concepts of the theory of hydraulics, including the description of the
hydraulic components, describes the design requirements for the hydraulic circuit of each system's
integrated blasting unit. From these requirements are presented, for each of the systems, circuits
diagrams of hydraulic equipment and calculations for selection. Finally, the paper concludes that
the integration of the three hydraulic circuits presented an optimization opportunity in engineering
solution and proved to be technically feasible.
Keywords: Hydraulic equipments, hydraulic, jetting, pressure drop, motors, pumps, valves

viii
Sumário
1 Introdução ....................................................................................................................... 14
1.1 Objetivo ............................................................................................................... 15
1.2 Estrutura do Trabalho .......................................................................................... 15
2 Conceitos Teóricos ......................................................................................................... 16
2.1 Força ......................................................................................................................... 16
2.2 Pressão ..................................................................................................................... 16
2.3 Vazão ....................................................................................................................... 16
2.4 Fluido ....................................................................................................................... 16
2.4.1 Massa Específica ............................................................................................... 17
2.4.2 Viscosidade Dinâmica ....................................................................................... 17
2.5 Hidrocinética ............................................................................................................ 17
2.5.1 Lei da Conservação da Energia ......................................................................... 17
2.5.2 Escoamento ....................................................................................................... 17
2.5.3 Perda de Carga ................................................................................................... 18
3 Equipamentos Hidráulicos .............................................................................................. 22
3.1 Tanque ...................................................................................................................... 22
3.2 Tubulação ................................................................................................................. 23
3.3 Bomba ...................................................................................................................... 23
3.3.1 Bomba de Engrenagens Externas ...................................................................... 24
3.4 Motor ........................................................................................................................ 25
3.4.1 Motor de Engrenagens Internas ......................................................................... 25
3.4.2 Motor de Pistão Radial ...................................................................................... 26
3.5 Cilindros ................................................................................................................... 27

ix
3.6 Válvulas ................................................................................................................... 28
3.6.1 Válvula Direcional ............................................................................................ 28
3.6.2 Válvula Limitadora de Pressão .......................................................................... 29
3.6.3 Válvula de Contrabalanço ................................................................................. 29
3.6.4 Válvula Divisora de Fluxo ................................................................................ 30
3.6.5 Válvula Controladora de Vazão ........................................................................ 30
3.6.6 Válvula de Retenção .......................................................................................... 31
3.7 Manômetro ............................................................................................................... 31
3.8 Trocador de Calor .................................................................................................... 32
3.9 Filtro ......................................................................................................................... 33
4 Requisitos de Projeto ...................................................................................................... 34
4.1 Sistema de Movimentação ....................................................................................... 35
4.1.1 Guincho Principal .............................................................................................. 35
4.1.2 Guincho Auxiliar ............................................................................................... 36
4.1.3 Carretel .............................................................................................................. 38
4.1.4 Potência ............................................................................................................. 39
4.2 Sistema de Bombeamento ........................................................................................ 40
4.2.1 Bomba Tríplex ................................................................................................... 40
4.2.2 Bomba de Acionamento .................................................................................... 41
4.2.3 Potência ............................................................................................................. 43
4.3 Sistema de Posicionamento ...................................................................................... 44
4.3.1 Cilindros Patola ................................................................................................. 44
4.3.2 Cilindros Mastro ................................................................................................ 44
4.3.3 Cilindros Pescoço de Ganso .............................................................................. 45
4.3.4 Potência ............................................................................................................. 46
x
5 Circuito Hidráulico ......................................................................................................... 47
5.1 Circuito Hidráulico do Sistema de Movimentação .................................................. 48
5.2 Circuito Hidráulico do Sistema de Bombeamento ................................................... 51
5.3 Circuito Hidráulico do Sistema de Posicionamento ................................................ 53
6 Cálculos para Seleção dos Equipamentos ....................................................................... 55
6.1 Sistema de Movimentação ....................................................................................... 55
6.1.1 Motores .............................................................................................................. 55
6.1.2 Perdas de Carga ................................................................................................. 58
6.2 Sistema de Bombeamento ........................................................................................ 66
6.2.1 Motores .............................................................................................................. 66
6.2.2 Perdas de Carga ................................................................................................. 68
6.3 Sistema de Posicionamento ...................................................................................... 78
6.3.1 Cilindros ............................................................................................................ 78
6.3.2 Perdas de Carga ................................................................................................. 78
6.4 Bombas ..................................................................................................................... 85
6.5 Motor Diesel ............................................................................................................ 88
7 Conclusão ....................................................................................................................... 90
8 Bibliografia ..................................................................................................................... 91

xi
Lista de figuras
Figura 1: Unidade de Jateamento ...................................................................................... 14
Figura 2: Sonda de Intervenção ......................................................................................... 14
Figura 3: Entrada ............................................................................................................... 19
Figura 4: Saída ................................................................................................................... 20
Figura 5: Redução .............................................................................................................. 20
Figura 6: Joelho ................................................................................................................. 21
Figura 7: T ......................................................................................................................... 21
Figura 8: Tanques .............................................................................................................. 22
Figura 9: Tubulações ......................................................................................................... 23
Figura 10: Tipo de bombas ................................................................................................ 24
Figura 11: Bomba de engrenagens externas (mecanismo) ................................................ 24
Figura 12: Bomba de engernagens externas ...................................................................... 25
Figura 13: Motor de engrenagens internas ........................................................................ 26
Figura 14: Motor de pistões radiais ................................................................................... 26
Figura 15: Cilindro ............................................................................................................ 27
Figura 16: Válvula Direcional ........................................................................................... 28
Figura 17: Válvula limitadora de pressão .......................................................................... 29
Figura 18: Válvula de contrabalanço ................................................................................. 29
Figura 19: Válvula divisora de fluxo ................................................................................. 30
Figura 20: Válvula controladora de vazão ......................................................................... 30
Figura 21: Válvula de retenção .......................................................................................... 31
Figura 22: Manômetro ....................................................................................................... 31
Figura 23: Trocador de calor ............................................................................................. 32
Figura 24: Filtro ................................................................................................................. 33
Figura 25: Organograma da unidade integrada de jateamento .......................................... 34
Figura 26: Guincho principal ............................................................................................. 35
Figura 27: Guincho auxiliar ............................................................................................... 36
Figura 28: Carretel ............................................................................................................. 38
Figura 29: Gráfico de potências do sistema de movimentação ......................................... 39
Figura 30: Catálogo Hammelmann .................................................................................... 40

xii
Figura 31: Catálogo bomba PGP - Vazões ........................................................................ 41
Figura 32: Catálogo bomba PGP - Potência ...................................................................... 42
Figura 33: Gráfico de potências do sistema de bombeamento .......................................... 43
Figura 34: Gráfico de potências do sistema de posicionamento ........................................ 46
Figura 35: Circuito hidráulico ........................................................................................... 47
Figura 36: Circuito hidráulico sistema de movimentação ................................................. 48
Figura 37: Circuito hidráulico sistema de bombeamento .................................................. 51
Figura 38: Circuito hidráulico sistema de posicionamento ............................................... 53
Figura 39: Catálogo motores MR ...................................................................................... 56
Figura 40: Catálogo motor OMS ....................................................................................... 57
Figura 41: Características fluido ISO VG 68 .................................................................... 58
Figura 42: Gráfico comando VP 120 ................................................................................. 61
Figura 43: Gráfico válvula CP441-2 .................................................................................. 62
Figura 44: Gráfico válvula de retenção modelo 1633........................................................ 63
Figura 45: Gráfico trocador de calor Vista Hydraulics...................................................... 64
Figura 46: Gráfico filtro HR19 .......................................................................................... 64
Figura 47: Catálogo motor MR .......................................................................................... 67
Figura 48: Catálogo motor PGM 030 ................................................................................ 68
Figura 49: Gráfico comando VP 80 ................................................................................... 72
Figura 50: Gráfico reguladora de vazão modelo 1227 ...................................................... 73
Figura 51: Gráfico válvula de retenção modelo 1600........................................................ 74
Figura 52: Gráfico trocador de calor Vista Hydraulics...................................................... 75
Figura 53: Gráfico filtro HR 19 ......................................................................................... 76
Figura 54: Gráfico comando VP 80 ................................................................................... 81
Figura 55: Gráfico válvula de retenção modelo 1200........................................................ 82
Figura 56: Gráfico trocador de calor Vista Hydraulics...................................................... 83
Figura 57: Gráfico filtro HR 19 ......................................................................................... 83
Figura 58: Catálogo bomba PGP ....................................................................................... 86
Figura 59: Tabela eixos bomba PGP 350 .......................................................................... 87
Figura 60: Tabela de desempenho bomba PGP 350 .......................................................... 88
Figura 61: Tabela motor diesel MWM - Linha Industrial ................................................. 89

xiii
Lista de Tabelas
Tabela 1: Acidentes sistema de movimentação ................................................................. 60
Tabela 2: Perda de carga sistema de movimentação.......................................................... 65
Tabela 3: Acidentes sistema de bombeamento .................................................................. 71
Tabela 4: Perda de carga sistema de bombeamento .......................................................... 77
Tabela 5: Cilindros sistema de posicionamento ................................................................ 78
Tabela 6: Acidentes sistema de posicionamento ............................................................... 80
Tabela 7: Perda de carga sistema de posicionamento ........................................................ 84
Tabela 8: Resumo pressões e vazões dos sistemas ............................................................ 85

14
1 Introdução
Poços de petróleo durante seu ciclo produtivo exigem periodicamente técnicas para a
manutenção da produção. Para tanto, são utilizados equipamentos que desempenham diversas
funções dentro do poço de petróleo. Entre estas funções, está a utilização da Unidade Integrada de
Jateamento que incorpora funções de uma sonda convencional de intervenção com um sistema de
jateamento que auxilia na manutenção da produção. O custo das operações com estes equipamentos
tem impacto significativo, e restrições orçamentárias decorrentes do baixo preço do barril do
petróleo, sugerem que sejam empregadas soluções de engenharia que tenham um baixo índice de
manutenção. Neste caso, a integração dos circuitos hidráulicos reduz o emprego de diversos
equipamentos, otimizando o sistema e consequentemente reduzindo custos de fabricação e
manutenção.
Figura 1: Unidade de Jateamento
Figura 2: Sonda de Intervenção

15
1.1 Objetivo
O objetivo deste trabalho é dimensionar parte dos equipamentos do circuito hidráulico de
uma unidade integrada de jateamento utilizada na intervenção de poços de petróleo.
1.2 Estrutura do Trabalho
Este trabalho está estruturado em 06 capítulos. O primeiro capítulo apresenta uma breve
introdução descrevendo a motivação do trabalho a descrição do problema e a definição do objetivo.
O capítulo 2 apresenta os conceitos teóricos necessários para o dimensionamento dos
circuitos hidráulicos.
O capítulo 3 apresenta equipamentos hidráulicos utilizados para o projeto do circuito
hidráulico da Unidade Integrada de Jateamento.
O capítulo 4 apresenta as funcionalidades referentes aos principais equipamentos da
unidade integrada de jateamento, bem como os parâmetros necessários ao dimensionamento dos
componentes do circuito hidráulico.
O capítulo 5 apresenta os diagramas dos circuitos hidráulicos associados a uma descrição
do seu funcionamento.
O capítulo 6 desenvolve os cálculos de perda de carga e outros parâmetros necessários ao
dimensionamento dos componentes do sistema hidráulico da unidade integrada de jateamento.
O capítulo 7 apresenta as conclusões deste trabalho.

16
2 Conceitos Teóricos
2.1 Força
Força é qualquer influência capaz de produzir uma alteração no movimento de um corpo.
A unidade de medida de força é o NEWTON (N). E, podemos converter em:
9,81 𝑁 = 1 𝑘𝑔𝑓
2.2 Pressão
Pressão é o quociente de uma determinada força distribuída por uma área. No sistema
internacional, a unidade de pressão é o Pascal (Pa). Trabalharemos com as seguintes conversões:
1 𝑃𝑎 = 1𝑁
𝑚2
1 𝑏𝑎𝑟 = 105 𝑃𝑎 = 10,197 𝑚 𝐻20
2.3 Vazão
Vazão representa um determinado volume de fluido que passa por uma seção em um
determinado tempo. Utilizaremos neste projeto a unidade de litros por minuto (l/min).
2.4 Fluido
Fluido é uma substância que se deforma continuamente sob a aplicação de uma tensão de
cisalhamento, não importando o quão pequeno seja seu valor. Como o movimento do fluido
continua sobre a aplicação dessa tensão, definimos um fluido também como uma substância que
não pode sustentar uma tensão de cisalhamento quando em repouso.

17
2.4.1 Massa Específica
A massa especifica de um fluido é definida pela quantidade de massa em um determinado
volume. Neste projeto trabalharemos principalmente como a unidade de Kg/m3.
2.4.2 Viscosidade Dinâmica
A viscosidade é a resistência que o fluido apresenta ao escoamento. Sendo que essa
resistência é definida como o atrito interno que é resultante do movimento de uma camada de fluido
em relação à outra. A unidade de trabalho será [Kg/(m x s)].
2.5 Hidrocinética
É o estudo das leis dos movimentos dos fluidos e suas efetivas forças.
2.5.1 Lei da Conservação da Energia
A lei da conservação da energia quando aplicada a um fluido em movimento afirma que a
energia total da vazão de um fluido não muda contanto que não seja adicionada energia de
procedência externa, ou que escape energia interna. Desta forma, se desprezarmos as perdas, temos
que:
𝑔 ∗ ℎ +𝑝
𝜌+
𝑣2
2= 𝑐𝑜𝑛𝑠𝑡.
2.5.2 Escoamento
Até uma determinada velocidade os fluidos se movimentam em camadas (escoamento
laminar) através da seção circular. Nesta altura a camada interna do fluido apresenta maior

18
velocidade. A camada mais externa se mantém imóvel em contato com a parede do tubo. Se
aumentarmos a vazão, após uma velocidade crítica, o perfil do fluxo se torna randômico
(escoamento turbulento).
Em termos práticos, para estimarmos o perfil do fluxo calculamos o número de Reynolds
do escoamento (Re) de acordo com a seguinte formula:
𝑅𝑒 =𝜌 ∗ 𝑣 ∗ 𝐷
𝜇
Para valores de Reynolds menores que 2000, temos que o escoamento é laminar e acima de
4000 o fluxo é turbulento. E, entre estes valores, o fluxo é instável, podendo ser laminar em casos
que se tem uma velocidade muito baixa e/ou fluido muito viscoso.
2.5.3 Perda de Carga
A perda de carga (hf) é a energia perdida pela unidade de peso do fluido quando este escoa.
Podemos desmembrar a perda de carga em duas partes, a normal (hfn) e a localizada (hfL).
ℎ𝑓 = ℎ𝑓𝑛 + ℎ𝑓𝐿
A unidade da perda de carga é dada em mH20.
2.5.3.1 Perda de Carga Normal
Como neste projeto trabalharemos apenas com fluxos laminares, a perda de carga normal
segue a formula abaixo:
ℎ𝑓𝑛 = 32 ∗𝜇 ∗ 𝐿 ∗ 𝑣
𝜌 ∗ 𝑔 ∗ 𝐷

19
Onde [𝜇] é a viscosidade dinâmica do fluido, [L] representa o comprimento total da
tubulação, [v] é a velocidade de escoamento, [D] é o diâmetro interno da tubulação, [𝜌] é a massa
especifica do fluido e [g] é a aceleração da gravidade.
2.5.3.2 Perda de Carga Localizada
São aquelas devidas a distúrbios locais do fluxo ao passar por acidentes, tais como entradas,
saídas, joelhos, curvas, reduções, entre outros. Neste projeto, como o fluxo é laminar e os acidentes
são conhecidos, iremos calcular as perdas de carga através do método direto, cuja formula esta
representada abaixo.
ℎ𝑓𝐿 = 𝐾 ∗𝑣2
2 ∗ 𝑔
Na expressão acima, K é um coeficiente experimental tabelado para cada tipo de acidente.
Sendo assim, iremos apresentar em seguida as tabelas para os acidentes encontrados neste projeto,
de acordo com De Falco (1998).
2.5.3.2.1 Entrada
Figura 3: Entrada
20
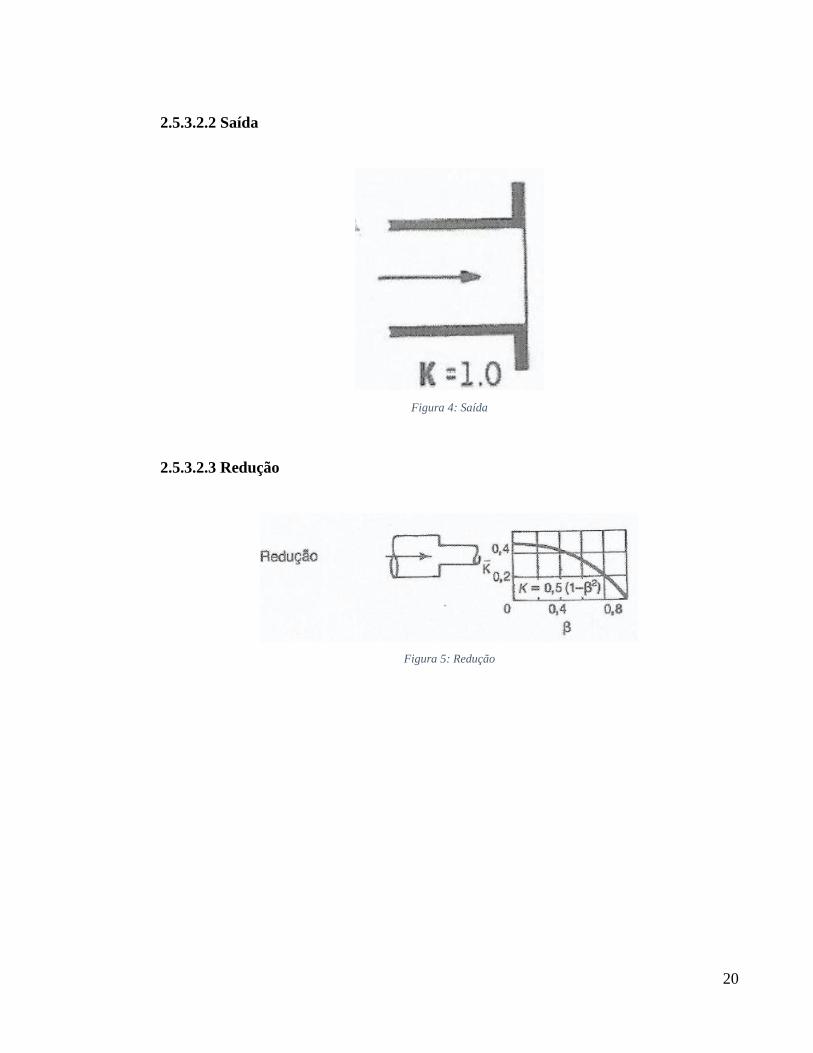
2.5.3.2.2 Saída
Figura 4: Saída
2.5.3.2.3 Redução
Figura 5: Redução

21
2.5.3.2.4 Joelho
Figura 6: Joelho
2.5.3.2.5 T (rosqueado)
Figura 7: T

22
3 Equipamentos Hidráulicos
Neste capitulo serão brevemente descritos os equipamentos hidráulicos utilizados na
Unidade Integrada de Jateamento.
3.1 Tanque
O tanque, também conhecido como reservatório hidráulico, é utilizado para o
armazenamento do fluido de trabalho, contribui para a troca de calor e para a decantação das
partículas contaminantes. Devido a essas tarefas o reservatório deve ter a sua capacidade
determinada conforme a necessidade, um indicativo é que normalmente o reservatório deve ter
capacidade de modo igual ou superior a três vezes o volume da vazão da bomba do sistema.
Figura 8: Tanques

23
3.2 Tubulação
Tubulação são linhas que conectam os equipamentos do sistema hidráulico, conduzindo o
fluido de trabalho. Podem ser tubos rígidos de aço ou flexíveis como as mangueiras. A tubulação
é selecionada de acordo com as pressões e vazões do sistema hidráulico, bem como analisando o
fluido de trabalho e as condições do meio na qual será instalada.
Figura 9: Tubulações
3.3 Bomba
As bombas são utilizadas nos circuitos hidráulicos, para converter energia mecânica em
energia hidráulica. A ação mecânica cria um vácuo parcial na entrada da bomba, o que permite que
a pressão atmosférica force o fluido do tanque, através da linha de sucção, a penetrar na bomba. A
bomba passará o fluido para a abertura de descarga, forçando-o através do sistema hidráulico.
Embora as bombas possuam uma enorme diversidade de princípios construtivos, são
classificadas, de forma mais ampla, como não-positivas quando o fluxo for continuo e como
positivas quando o fluxo for pulsante.

24
Figura 10: Tipo de bombas
3.3.1 Bomba de Engrenagens Externas
É uma bomba de deslocamento positivo, amplamente utilizada devido ao seu excelente
custo-benefício. Conforme verificamos na figura X, neste tipo de bomba, o fluido entra quando os
dentes das engrenagens desengrenam sendo conduzido pelo espaço existente entre os dentes e a
carcaça, para o lado da saída onde os dentes das engrenagens engrenam e forçam o fluido para fora
do sistema. Uma vedação positiva é realizada entre os dentes e a carcaça, e entre os próprios dentes
de engrenamento. As bombas de engrenagem têm geralmente um projeto não compensado.
Figura 11: Bomba de engrenagens externas (mecanismo)

25
Este tipo de bomba também permite a utilização de múltiplas unidades, reduzindo o custo
de instalação, proporcionando a montagem de duas ou mais bombas em um único eixo motriz,
requerendo menor espaço de montagem e possibilitando o uso de uma única linha de entrada
(sucção). As vazões das secções da bomba podem ser direcionadas para circuitos específicos ou
podem combinar-se para produzir alta vazão, maior que a de uma bomba simples.
Figura 12: Bomba de engernagens externas
3.4 Motor
Os motores hidráulicos transformam a energia de trabalho hidráulico em energia mecânica
rotativa, que é aplicada ao objeto resistivo por meio de um eixo. Todos os motores consistem
basicamente de uma carcaça com conexões de entrada e saída e de um conjunto rotativo ligado a
um eixo. Assim como as bombas, existem uma grande variedade de princípios construtivos para
os motores, dentre eles:
3.4.1 Motor de Engrenagens Internas
Também conhecido como motor orbital, os motores de engrenagens internas são motores
de baixa velocidade e alto torque, utilizam o conceito internamente de rotor gerotor, com vantagens
construtivas. O rotor elememto de potência não orbita, somente gira. Esta função é executada pela
orbitação do anel externo, eixo feito de uma única peça. O complexo engrenamento é mantido entre
o eixo e o rotor, desde que não haja movimento relativo entre eles.

26
Figura 13: Motor de engrenagens internas
3.4.2 Motor de Pistão Radial
O motor de pistão radial consiste de pinos pivotados que direcionam o fluxo de fluido para
dentro e para fora de um cilindro, um alojamento para um pistão e um rotor contendo um anel de
reação excêntrico. O pistão se mantém em constante contato com o anel devido as ações da força
centrífuga e reação do pistão. Na medida que o eixo principal rotaciona, os pistões em um lado se
retraem e fazendo com que o fluído na medida que oeste passa pela porta de sucção entre no
cilindro. Quando o pistão passa pelo ponto de maior excentricidade do anel força o fluído a entrar
na porta de descarga.
Figura 14: Motor de pistões radiais

27
3.5 Cilindros
Cilindros hidráulicos transformam trabalho hidráulico em energia mecânica linear, a qual é
aplicada a um objeto resistivo para realizar trabalho. Um cilindro consiste de uma camisa de
cilindro, de um pistão móvel e de uma haste ligada ao pistão. O pistão divide o interior do cilindro
em duas câmaras, a inferior e a da haste. A pressão hidraulica atua no pistão para produzir o
movimento linear.
Figura 15: Cilindro

28
3.6 Válvulas
As válvulas são elementos lógicos fundamentais em circuitos hidráulicos e servem, de
modo geral, para controlar a pressão, a direção e/ou volume de fluido no circuito hidráulico.
3.6.1 Válvula Direcional
Também conhecida como comando hidráulico, esta válvula consiste de um corpo com
passagens internas que são conectadas e desconectadas por uma parte móvel, permitindo ou não a
passagem de fluxo em uma determinada direção. Para a seleção deste tipo de válvula devemos
sempre observar o número de posições e vias, a posição normal e o tipo de acionamento.
Figura 16: Válvula Direcional

29
3.6.2 Válvula Limitadora de Pressão
Também conhecida como válvula de segurança, tem por função limitar a pressão máxima
do circuito hidráulico, garantindo que os equipamentos não operem com pressões superiores as
recomendadas pelos respectivos fabricantes.
Figura 17: Válvula limitadora de pressão
3.6.3 Válvula de Contrabalanço
São válvulas que permitem o fluxo livre para o atuador e que bloqueiam o fluxo reverso,
até que sejam acionadas por uma pressão inversamente proporcional à carga, liberando a passagem
do fluxo reverso. Eles empregam uma válvula de retenção na direcção do fluxo livre, e uma válvula
de alívio para controlar o fluxo na direção inversa.
Figura 18: Válvula de contrabalanço

30
3.6.4 Válvula Divisora de Fluxo
As válvulas divisoras de fluxo são aplicadas nas situações nas quais se necessita dividir o
fluxo proporcionalmente a partir de uma única entrada de fluido.
Figura 19: Válvula divisora de fluxo
3.6.5 Válvula Controladora de Vazão
A função da válvula controladora de vazão é a de reduzir o fluxo da bomba em uma linha
do circuito. Ela desempenha a sua função por ser uma restrição maior que a normal no sistema. As
válvulas controladoras de vazão são aplicadas em sistemas hidráulicos quando se deseja obter um
controle de velocidade em determinados atuadores, o que é possível através da diminuição do fluxo
que passa por um orifício.
Figura 20: Válvula controladora de vazão

31
3.6.6 Válvula de Retenção
Tem por função permitir a passagem de fluido somente em uma direção. Quando a pressão
na entrada da válvula é alta o suficiente para vencer a mola que segura o assento, o fluxo passa pela
válvula. Se o fluxo estiver na direção contrária, o assento retorna a sua posição original, não
permitindo a passagem de fluido.
Figura 21: Válvula de retenção
3.7 Manômetro
O manômetro é um aparelho que mede o diferencial de pressão. Neste projeto, foram
utilizados somente os manômetros do tipo Bourdon, que consiste em uma escala calibrada em
unidades de pressão e um indicador ligado, através de um mecanismo, a um tubo oval ligado
conectado a pressão a ser medida.
Figura 22: Manômetro

32
3.8 Trocador de Calor
Como todo sistema hidráulico aquece devido ao trabalho realizado e as perdas de carga, o
trocador de calor, também conhecido como resfriador, tem por função resfriar o fluido. Nos
resfriadores a ar, como o utilizado nesse projeto, o fluido é bombeado através de tubos aletados.
Para dissipar o calor, o ar é soprado sobre os tubos e aletas por um ventilador. Os resfriadores a ar
são geralmente usados onde a água não está disponível facilmente.
Figura 23: Trocador de calor

33
3.9 Filtro
O filtro tem por função evitar a contaminação do fluido utilizado no sistema hidráulico por
partículas indesejáveis, evitando assim o mau funcionamento e até a perda precoce dos
equipamentos.
Figura 24: Filtro

34
4 Requisitos de Projeto
A unidade integrada de jateamento deve realizar operações comuns em sondas de produção
terrestres (SPT), bem como as funções de uma unidade de jateamento tradicional. A seguir, iremos
dividir as funcionalidades de acordo com os sistemas apresentados na Figura 25.
Figura 25: Organograma da unidade integrada de jateamento
Cada sistema possui acionamento independente, podendo trabalhar em conjunto com os
outros. As operações internas dos sistemas serão detalhadas a seguir.
Unidade Integrada de Jateamento
Sistema de Movimentação
Guincho Principal
Guincho Auxiliar
Carretel
Sistema de Bombeamento
Bomba Triplex
Bomba de Acionamento
Sistema de Posicionamento
Cilindros Patola
Cilindros Mastro
Cilindros Pescoço de Ganso

35
4.1 Sistema de Movimentação
O sistema de movimentação inclui os seguintes equipamentos:
4.1.1 Guincho Principal
A função do guincho principal é movimentar o cabo de aço permitindo içar ou abaixar
colunas de produção ou quaisquer outros equipamentos de sub-superfície, para dentro ou fora do
poço.
Figura 26: Guincho principal
Para atender as necessidades de operação, o guincho principal deve ter capacidade de tração
de 5,0 toneladas e uma velocidade efetiva de 40 m/min. Assim a potência necessária do guincho é
calculada:
𝑇𝑟𝑎çã𝑜 = 5,0 𝑡 = 5.000 𝑘𝑔𝑓 = (5.000 ∗ 9,81) = 49.050,00 𝑁
𝑉𝑒𝑙𝑜𝑐𝑖𝑑𝑎𝑑𝑒 = 40 𝑚/ min = 0,66667 𝑚/𝑠
𝑃𝑜𝑡ê𝑛𝑐𝑖𝑎 = 49.050,00 ∗ 0,66667 = 32.700 𝑊 = 32,7 𝐾𝑤

36
E, para calcularmos a rotação e o torque necessários para o motor hidráulico que acionará
o guincho principal, devemos considerar o diâmetro do tambor do guincho e a redução acoplada
ao motor.
𝑅𝑒𝑑𝑢çã𝑜 (𝑖): 1: 30
𝐷𝑖â𝑚𝑒𝑡𝑟𝑜 𝑑𝑜 𝑡𝑎𝑚𝑏𝑜𝑟 (𝐷𝑖𝑎. ): 900 𝑚𝑚 = 0,9 𝑚
𝑅𝑃𝑀 (𝑤) = 30 ∗40
(𝜋 ∗ 0,9) = 424,62 𝑟𝑝𝑚
𝑇𝑜𝑟𝑞𝑢𝑒 𝑀𝑜𝑡𝑜𝑟 = 49.050 ∗ (0,9
2) ∗ (
1
30) = 735,75 𝑁𝑚
4.1.2 Guincho Auxiliar
A função do guincho auxiliar é permitir a movimentação de equipamentos auxiliares fora
do poço, como tubos no estaleiro.
Figura 27: Guincho auxiliar

37
Para atender as necessidades de operação, o guincho principal e o guincho auxiliar devem
ter capacidades de tração de 2,0 toneladas de carga e uma velocidade efetiva de 60 m/min.Desta
forma, a potência necessária do guincho é calculada:
𝑇𝑟𝑎çã𝑜 = 2,0 𝑡 = 2.000 𝑘𝑔𝑓 = (2.000 ∗ 9,81) = 19.620,00 𝑁
𝑉𝑒𝑙𝑜𝑐𝑖𝑑𝑎𝑑𝑒 = 60 𝑚/ min = 1,0 𝑚/𝑠
𝑃𝑜𝑡ê𝑛𝑐𝑖𝑎 = 19.620,00 ∗ 1,0 = 19.620 𝑊 = 19,62 𝐾𝑤
E, para calcularmos a rotação e o torque necessários para o motor hidráulico que acionará
o guincho auxiliar, devemos considerar o diâmetro do tambor do guincho e a redução acoplada ao
motor.
𝑅𝑒𝑑𝑢çã𝑜 (𝑖): 1: 10
𝐷𝑖â𝑚𝑒𝑡𝑟𝑜 𝑑𝑜 𝑡𝑎𝑚𝑏𝑜𝑟 (𝐷𝑖𝑎. ): 289 𝑚𝑚 = 0,289 𝑚
𝑅𝑃𝑀 (𝑤) = 10 ∗60
(𝜋 ∗ 0,289) = 661,18 𝑟𝑝𝑚
𝑇𝑜𝑟𝑞𝑢𝑒 𝑀𝑜𝑡𝑜𝑟 = 19.620 ∗ (0,289
2) ∗ (
1
10) = 283,5 𝑁𝑚

38
4.1.3 Carretel
A função do carretel é movimentar o tubo de aço flexível para dentro e fora do poço com o
objetivo de realizar a operação de jateamento da formação.
Figura 28: Carretel
Assim como os guinchos principal e auxiliaro carretel deve ter capacidade de tração de 1
tonelada de carga e uma velocidade efetiva de 60 m/min. Logo, a potência necessária do carretel é
calculada:
𝑇𝑟𝑎çã𝑜 = 1,0 𝑡 = 1.000 𝑘𝑔𝑓 = (1.000 ∗ 9,81) = 9.810,0 𝑁
𝑉𝑒𝑙𝑜𝑐𝑖𝑑𝑎𝑑𝑒 = 60 𝑚/ min = 1,0 𝑚/𝑠
𝑃𝑜𝑡ê𝑛𝑐𝑖𝑎 = 9.810,0 ∗ 1,0 = 9.810 𝑊 = 9,81 𝐾𝑤
E, para calcularmos a rotação e o torque necessários para o motor hidráulico que acionará
o carretel, devemos considerar o diâmetro do tambor do guincho e a redução acoplada ao motor.
𝑅𝑒𝑑𝑢çã𝑜 (𝑖): 1: 6

39
𝐷𝑖â𝑚𝑒𝑡𝑟𝑜 𝑑𝑜 𝑡𝑎𝑚𝑏𝑜𝑟 (𝐷𝑖𝑎. ): 600 𝑚𝑚 = 0,6 𝑚
𝑅𝑃𝑀 (𝑤) = 6 ∗60
(𝜋 ∗ 0,6) = 191,08 𝑟𝑝𝑚
𝑇𝑜𝑟𝑞𝑢𝑒 𝑀𝑜𝑡𝑜𝑟 = 9.810 ∗ (0,6
2) ∗ (
1
6) = 490,5 𝑁𝑚
4.1.4 Potência
No sistema de movimentação, os equipamentos trabalham de forma independente, como
podemos verificar no gráfico a seguir.
Figura 29: Gráfico de potências do sistema de movimentação
Assim, a potência total do sistema não será soma de cada uma individualmente, mas sim a
maior potência requerida que, no caso, é a do guincho principal com o valor 32,7 Kw.

40
4.2 Sistema de Bombeamento
O sistema de bombeamento é composto pelos seguintes equipamentos:
4.2.1 Bomba Tríplex
A bomba Tríplex tem a função de gerar a vazão e pressão necessárias pra jatear a formação.
Para cumprir esse objetivo, a bomba deve ser capaz de fornecer uma pressão de até 500 bar com
uma vazão de 15 lpm. Desta forma, selecionamos a seguinte bomba HDP20 da Hammelmann
conforme o catalogo a seguir.
Figura 30: Catálogo Hammelmann

41
Através dos dados fornecidos pelo fabricante, verificamos que a potência necessária é de
15 Kw e a rotação de 750 rpm. Assim, para calcularmos o torque para acionamento da bomba,
temos:
𝑇𝑜𝑟𝑞𝑢𝑒 [𝑁𝑚] = 9.548,8 ∗𝑃𝑜𝑡ê𝑛𝑐𝑖𝑎 [𝐾𝑤]
𝑟𝑝𝑚 = 9.548,8 ∗
15
750= 190,97 𝑁𝑚
Com esses dados podemos calcular o motor hidráulica que acionará a bomba Tríplex do
sistema.
4.2.2 Bomba de Acionamento
A bomba de acionamento tem como função entregar energia hidráulica para acionar a
ferramenta hidráulica de corte do revestimento. Para o pleno funcionamento da ferramenta, a
bomba deve fornecer uma vazão de 24 l/min e uma pressão máxima de 120 bar. Para atender esta
necessidade, selecionamos a bomba PGP030 com engrenagem de 1” da fabricante Parker através
da análise do catálogo do fornecedor (ver Fig).
Figura 31: Catálogo bomba PGP - Vazões

42
Figura 32: Catálogo bomba PGP - Potência
Como o catálogo fornece a potência necessária com uma pressão de operação de 172 bar,
vamos calcular uma conversão linear para calcular a potência necessária a 120 bar. Desta forma,
temos que:
𝐸𝑓𝑖𝑐𝑖ê𝑛𝑐𝑖𝑎 = 𝑃𝑜𝑡. [𝑘𝑤]/( 𝑃𝑟𝑒𝑠𝑠ã𝑜[𝑏𝑎𝑟]
𝑉𝑎𝑧ã𝑜 [𝑙𝑝𝑚]) = 11/(
172
24,5) = 1,566
𝑃𝑜𝑡ê𝑛𝑐𝑖𝑎 = 1,566 ∗120
24= 7,834 𝐾𝑤
Logo, a potência necessária para atender as especificações da bomba de acionamento é de
7,834 Kw.
43
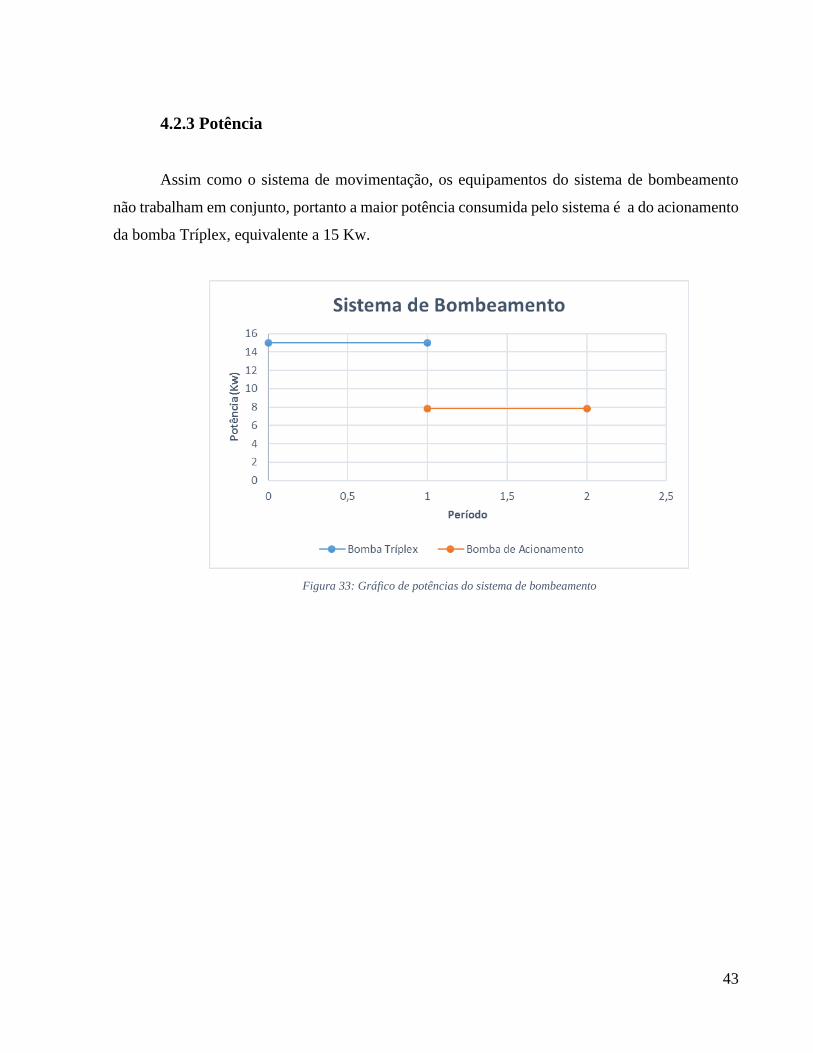
4.2.3 Potência
Assim como o sistema de movimentação, os equipamentos do sistema de bombeamento
não trabalham em conjunto, portanto a maior potência consumida pelo sistema é a do acionamento
da bomba Tríplex, equivalente a 15 Kw.
Figura 33: Gráfico de potências do sistema de bombeamento

44
4.3 Sistema de Posicionamento
O sistema de posicionamento é composto pelos seguintes equipamentos:
4.3.1 Cilindros Patola
O subsistema é composto por 4 cilindros posicionados de forma a dar estabilidade e suportar
a carga aplicada a toda estrutura da Unidade Integrada de Jateamento. Cada cilindro deve suportar
uma carga máxima de 8.000 kgf e devem completar o curso total em 3 minutos. O cilindro
selecionado possui as seguintes características:
Diâmetro êmbolo: 150 mm
Diâmetro haste: 80 mm
Curso: 2.000 mm
Desta forma, para calcularmos a potência necessária por cilindro temos que:
𝑉𝑒𝑙𝑜𝑐𝑖𝑑𝑎𝑑𝑒 =
2.0001.0003 ∗ 60
= 0,0111 𝑚/𝑠
𝑃𝑜𝑡ê𝑛𝑐𝑖𝑎 𝑇𝑜𝑡𝑎𝑙 = 4 ∗[(8.000 ∗ 9,81) ∗ 0,0111]
1000= 4 ∗ 0,871 = 3,484 𝐾𝑤
4.3.2 Cilindros Mastro
Este subsistema é composto por 2 cilindros que são acionados em conjunto com objetivo
de elevar e descer o mastro quando necessário. Cada cilindro deve suportar uma carga máxima de
7.000 kgf e devem completar o curso total em 5 minutos. O cilindro selecionado possui as seguintes
características:

45
Diâmetro êmbolo: 150 mm
Diâmetro haste: 80 mm
Curso: 1.900 mm
Desta forma, para calcularmos a potência necessária por cilindro temos que:
𝑉𝑒𝑙𝑜𝑐𝑖𝑑𝑎𝑑𝑒 =
1.9001.0005 ∗ 60
= 0,00633 𝑚/𝑠
𝑃𝑜𝑡ê𝑛𝑐𝑖𝑎 𝑇𝑜𝑡𝑎𝑙 = 2 ∗[(7.000 ∗ 9,81) ∗ 0,00633]
1000= 2 ∗ 0,434 = 0,869 𝐾𝑤
4.3.3 Cilindros Pescoço de Ganso
Este subsistema é composto por 2 cilindros que são acionados separadamente com objetivo
de posicionar o pescoço de ganso para a operação de jateamento. Cada cilindro deve suportar uma
carga máxima de 2.500 kgf e devem completar o curso total em 1 minuto. O cilindro selecionado
possui as seguintes características:
Diâmetro êmbolo: 70 mm
Diâmetro haste: 50 mm
Curso: 700 mm
Desta forma, para calcularmos a potência necessária por cilindro temos que:
𝑉𝑒𝑙𝑜𝑐𝑖𝑑𝑎𝑑𝑒 =
7001.0001 ∗ 60
= 0,01166 𝑚/𝑠
𝑃𝑜𝑡ê𝑛𝑐𝑖𝑎 𝑇𝑜𝑡𝑎𝑙 = 2 ∗[(700 ∗ 9,81) ∗ 0,01166]
1000= 2 ∗ 0,08 = 0,16 𝐾𝑤

46
4.3.4 Potência
Embora os cilindros deste sistema estejam submetidos a esforços em um mesmo período,
estes somente consomem potência quando estão em movimento. A seguir verificaremos, através
do gráfico de potências, que o pico ocorre nos cilindros da patola.
Figura 34: Gráfico de potências do sistema de posicionamento

47
5 Circuito Hidráulico
Após conhecermos e calcularmos todos os requisitos de projeto no capítulo anterior,
apresentamos o circuito hidráulico que será utilizado para acionar cada equipamento dos
sistemas. Este circuito hidráulico foi projetado especificamente para atender as necessidades da
Unidade Integrada de Jateamento e em seguida foi simulado através do software Automation
Studio.
Figura 35: Circuito hidráulico
Com o intuito de facilitar a análise do circuito hidráulico, dividiremos o mesmo em 03
sistemas apresentados a seguir:
Sistema de Movimentação;
Sistema de Bombeamento;
Sistema de Posicionamento.

48
5.1 Circuito Hidráulico do Sistema de Movimentação
O circuito hidráulico do sistema de movimentação tem por objetivo acionar o guincho
principal, o guincho auxiliar e o carretel, e é representado conforme o diagrama abaixo:
Figura 36: Circuito hidráulico sistema de movimentação
Começaremos a análise pelo tanque, que armazena o fluido de trabalho do sistema, que
neste caso é o óleo ISO VG 68. Assim que a válvula de bloqueio é aberta, o fluido passa por filtros
em direção a bomba A com intuito de eliminar possíveis partículas que danifiquem os
equipamentos.
49
Quando a bomba A é acionada pelo motor diesel acoplado, o fluido é pressurizado e segue
em direção a válvula de segurança. Essa válvula tem por função limitar a pressão máxima do
sistema, garantindo que os equipamentos não trabalhem em pressões superiores a que eles tenham
sido projetados, evitando assim vazamentos e a própria perda de equipamentos. Ela está conectada
diretamente ao tanque de óleo, é normalmente fechada e é acionada quando a pressão da linha
atinge uma pressão superior a regulada.
Em seguida, o fluido segue em direção ao comando duplo. Esse comando possui uma
válvula de segurança acoplada com o intuito de proteger os carreteis internos, limitando a pressão
dos equipamentos que acionam o guincho principal e auxiliar, e que quando acionada direciona o
fluxo para tanque diretamente. Neste comando, o fluido passa primeiramente pela válvula
direcional que aciona o guincho principal. Caso essa válvula seja acionada em uma direção, o fluxo
passa pela válvula de contrabalanço e segue em direção ao motor, permitindo a rotação do guincho
principal para um sentido. E quando a válvula direcional é acionada para o outro sentido, o fluxo
também passa pela contrabalanço e segue em direção ao motor para rotacionar o guincho principal
para o outro sentido. A função da válvula de contrabalanço é de impedir o fluxo caso não seja
acionada pela válvula direcional, funcionando como um freio, não permitindo a movimentação do
guincho principal por forças externas ao sistema hidráulico. E em paralelo, ao motor que aciona o
guincho principal, encontra-se uma válvula estranguladora que controla a velocidade de rotação do
motor. Quando a válvula estranguladora estiver totalmente fechada, o motor estará em sua rotação
máxima, pois todo o fluxo está sendo direcionado para o motor. A medida que a válvula se abre, a
rotação diminui, pois parte da vazão que deveria estar passando pelo motor retorna para o tanque.
Caso esse comando permaneça na posição neutra, o fluido segue em direção a segunda
válvula direcional dentro do comando, a que aciona o guincho auxiliar. E assim como a primeira
válvula direcional, caso a segunda válvula seja acionada em uma direção o fluxo passa pela válvula
de contrabalanço e segue em direção ao motor, permitindo a rotação do guincho auxiliar para um
sentido. E, quando acionada para o outro sentido, o fluxo também passa pela contrabalanço e segue
em direção ao motor para rotacionar o guincho auxiliar para o outro sentido. A função da válvula
de contrabalanço também é a mesma, de impedir o fluxo caso não seja acionada pela válvula
direcional, funcionando como um freio hidráulico. Além disso, o motor do guincho auxiliar
também possui uma válvula estranguladora para controlar a rotação da mesma forma que no
guincho principal.

50
Quando as duas válvulas direcionais pertencentes ao comando estão na posição neutra, o
fluxo vai em direção ao segundo comando, que possui apenas uma válvula direcional. E assim
como os guinchos principais e auxiliares, quando a válvula estiver acionada para uma direção o
fluxo passará pela válvula de contrabalanço e em seguida pelo motor, permitindo a rotação do
carretel em um sentido. Quando a válvula estiver acionada na direção oposta, o fluxo passará pela
válvula de contrabalanço e entrará no motor pelo lado oposto, fazendo com que o carretel rotacione
para o outro lado. E da mesma forma que os guincho principal e auxiliar, o motor do carretel possui
uma válvula estranguladora em paralelo para controlar a rotação.
E, caso todas as válvulas direcionais estejam na posição neutra ou uma delas ativada para
uma direção, o fluido retorna passando pelo trocador de calor para retirar o calor gerado
principalmente pelas perdas de carga do sistema, mantendo o fluido em sua faixa de temperatura
ideal para trabalho. Esse procedimento é essencial pois se a temperatura do fluido aumentar a
viscosidade diminui, ocasionando a perda de eficiência do sistema devido ao aumento de
vazamentos internos. Em seguida, o fluido passa por mais uma filtragem, garantindo que qualquer
impureza seja retirada, e chega ao tanque.
Vale ressaltar, que o sistema possui diversas válvulas de retenção estrategicamente
posicionadas para que o fluido siga diretamente para o tanque sem que interfira nos outros sistemas.

51
5.2 Circuito Hidráulico do Sistema de Bombeamento
O circuito hidráulico do sistema de bombeamento deve acionar as bombas Tríplex e a de
acionamento, como representado na Figura X.
Figura 37: Circuito hidráulico sistema de bombeamento
52
Assim como o sistema de movimentação, quando permitimos a passagem de fluido pela
válvula de bloqueio, o fluido localizado no tanque passa pelo filtro e entra na bomba. Ao acionar
o motor diesel, a bomba B gera fluxo em direção a válvula de segurança. Por sua vez, a válvula de
segurança possuiu uma regulagem independente do sistema anterior, dependendo da capacidade
dos equipamentos que trabalham neste sistema. Em seguida, o fluxo segue para o comando que
possui uma válvula direcional e outra válvula de segurança acoplada. Caso a válvula direcional
esteja na posição neutra, o fluido passa por uma válvula de retenção e então segue o caminho de
retorno para o tanque.
Quando a válvula direcional está acionada na posição de fluxos paralelos, o fluido segue
em direção ao motor hidráulico que aciona a bomba da ferramenta. Aválvula estranguladora
controla a rotação do motor e o fluido passa por uma válvula de retenção e segue o caminho de
retorno ao tanque.
Quando a válvula direcional está acionada na posição de fluxos cruzados, o procedimento
é o mesmo anteriormente citado, porém o fluido segue em direção ao motor hidráulico que aciona
a bomba Tríplex. Assim como no sistema de movimentação, o fluxo, uma vez que esteja retornando
ao tanque, passa por um trocador de calor para resfriar o fluido e por um filtro para reter as
partículas, antes de retornar ao tanque.

53
5.3 Circuito Hidráulico do Sistema de Posicionamento
O circuito hidráulico do sistema de posicionamento tem a função de acionar os cilindros da
patola, do mastro e do pescoço de ganso, e é representado pelo diagrama a seguir.
Figura 38: Circuito hidráulico sistema de posicionamento
Da mesma forma que o sistema de movimentação e o de bombeamento, assim que a válvula
de bloqueio é aberta, o fluido sai do tanque em direção a bomba C, passando pelo filtro. Quando a
bomba C é acionada pelo mesmo motor diesel que aciona as bombas A e B, o fluido segue em
direção a válvula de segurança que também possui a função de limitar a maior pressão de trabalho
do sistema. E, caso a pressão seja maior que a pressão regulada na válvula, ela abre passagem
gerando fluxo em direção a linha de retorno do tanque. Nessa linha o fluido passará por uma válvula
de retenção e depois seguirá para o mesmo trocador de calor e filtro do sistema de bombeamento.

54
Após a saída da bomba e em paralelo com a válvula de seguranca, o fluxo segue para um
comando quádruplo, que possui quatros válvulas direcionais e uma válvula de segurança acoplada.
Cada válvula direcional controla o avanço e o retorno de uma patola, dependendo da direção em
que é acionada. O retorno dessas válvulas a posição neutra é feito por molas. As válvulas
direcionais podem ser acionadas em conjunto ou independentes, dependo da posição desejada em
cada patola. Quando as válvulas direcionais estão na posição neutra, elas não permitem fluxo pelas
linhas do cilindro, fazendo com que eles suportem cargas externas e se mantenham na mesma
posição.
Ao passar pelo comando quádruplo, o fluxo segue para uma válvula de retenção e em
seguida para o comando duplo que controla os cilindros do pescoço de ganso. Neste comando
encontramos duas válvulas direcionais e uma de segurança acoplada. Cada válvula direcional
controla o avanço e o retorno de um dos cilindros do pescoço de ganso. E, da mesma forma que no
comando que controla as patolas, o retorno da válvula direcional a posição neutra é feito por molas
e, uma vez nessa posição, ela não permite fluxo proveniente do cilindro, mantendo-o estável na
posição desejada.
Ao passar pelo comando que controla os cilindros do pescoço de ganso, o fluxo segue por
outra válvula de retenção e em seguida para o comando que controla os cilindros do mastro. Este
comando é composto por uma válvula direcional e uma válvula de segurança acoplada. Quando a
válvula direcional está na posição de fluxos paralelos, o fluido segue por uma válvula divisora de
fluxo e em seguida aciona as válvulas de contrabalanço para permitir o avanço dos cilindros do
mastro. E, quando a válvula direcional está na posição de fluxos cruzados, o fluido segue para as
válvulas de contrabalanço permitindo o retorno do cilindro. Em paralelo as válvulas de
contrabalanço temos uma válvula estranguladora para controlar a vazão direcionada aos cilindros
e, desta forma, controlar a velocidade de avanço e retorno.
Após passar pelo comando que controla os cilindros do mastro, o fluxo segue por mais uma
válvula de retenção e então segue em direção ao tanque passando pelo mesmo trocador de calor e
filtro do sistema de bombeamento.

55
6 Cálculos para Seleção dos Equipamentos
Neste capítulo serão apresentados os cálculos necessários para que a unidade integrada de
jateamento realize todas as funções necessárias. Primeiramente calcularemos as vazões e pressões
necessárias para cada sistema, incluindo a perda de carga, e em seguida as bombas e o motor diesel
para acionamento.
6.1 Sistema de Movimentação
Como conhecemos os requisitos de cada sistema, iremos calcular os motores hidráulicos
necessários para atuar cada equipamento e em seguida calcularemos as respectivas perdas de carga
do sistema.
6.1.1 Motores
Tendo em vista que o guincho principal é o equipamento que demanda maior potência no
sistema de movimentação, começaremos a análise por este equipamento. Para tal, necessitamos um
motor hidráulico que seja capaz de entregar um torque de 735,75 Nm e rotação de 424,62 rpm.
Analisando os tipos de motores mais comuns na indústria, verificamos que um motor hidráulico de
pistões radiais atende estes requisitos. Sendo assim, foi selecionado o motor MR 250 D da
fabricante Parker, conforme verificado pela tabela do fabricante.

56
Figura 39: Catálogo motores MR
Logo, para atingirmos os requisitos, o sistema hidráulico de movimentação deve ser capaz
de prover as seguintes vazões e pressões:
𝑉𝑎𝑧ã𝑜 = 424,62 ∗ (250,9
1000) = 106,5 𝑙/𝑚𝑖𝑛
𝑃𝑟𝑒𝑠𝑠ã𝑜 =735,75
4= 183,9 𝑏𝑎𝑟

57
Uma vez que temos a vazão e pressão máxima do sistema de movimentação, calcularemos
os motores hidráulicos do guincho auxiliar e do carretel. Para o guincho auxiliar, necessitamos de
um motor capaz de gerar 283,5 Nm de torque e 661,8 rpm de rotação. Analisando novamente os
motores mais comuns na indústria e pela tabela X, foi selecionado o motor MR 160 C da fabricante
Parker.
E, para o carretel, o motor necessita entregar 490,5 Nm de torque e 191,08 rpm de rotação.
Desta forma, selecionamos o motor orbital OMS315 da fabricante Sauer Danfoss, conforme
verifica-se no gráfico a seguir.
Figura 40: Catálogo motor OMS
Note que este motor possui uma vazão máxima menor que a vazão utilizada no sistema
hidráulico de movimentação. Por isso, a válvula estranguladora que está paralela ao motor do
carretel deve ser regulada de forma a sempre permitir uma certa passagem de fluxo, de modo a
proteger o motor hidráulico.

58
6.1.2 Perdas de Carga
As perdas de carga nos sistemas hidráulicos influenciam diretamente na seleção da bomba
e do respectivo motor diesel para acionamento. Para o cálculo das perdas de carga é necessário
definir as propriedades do fluido utilizado no sistema que, no caso, é o óleo mineral ISO VG 68.
Seguem as propriedades necessárias:
Figura 41: Características fluido ISO VG 68
E, como a pressão máxima necessária para acionar o motor do guincho principal é muito
maior que as outras, calcularemos somente as perdas de carga referentes a esse equipamento, pois
a bomba de acionamento será a mesma para todo o sistema de movimentação. Sendo assim,
calcularemos as perdas de carga nos seguintes equipamentos:
25,4 metros de tubulação
01 comando
01 válvula de contrabalanço dupla
01 válvula reguladora de vazão
01 trocador de calor
01 filtro
03 manômetros

59
6.1.2.1 Tubulação
Atendendo os requisitos de vazão, pressão e fluido foi selecionado uma tubulação nova de
aço soldado com diâmetro interno de 1½”.
Para calcularmos a perda de carga na tubulação, utilizaremos a seguinte fórmula:
ℎ𝑡𝑛 = 32 ∗ 𝜇 ∗ 𝐿 ∗𝑉
𝜌 ∗ 𝑔 ∗ 𝐷
A fórmula para velocidade de escoamento é escrita na forma de:
𝑉 = 4 ∗𝑄
𝜋 ∗ 𝐷2
Substituindo os valores e realizando as conversões necessárias, temos:
𝑉 = 4 ∗
(106,5 ∗ (1
60) ∗ (1
1000))
𝜋 ∗ (1,5 ∗25,41000)
2 = 1,56 𝑚/𝑠
Calculando o número de Reynolds, temos:
𝑅𝑒 =𝜌 ∗ 𝑉 ∗ 𝐷
𝜇
𝑅𝑒 =878 ∗ 1,56 ∗ (1,5 ∗
25,41000)
(878 ∗ 68 ∗ 10−6)= 874
Como o número de Reynolds é menor que 2000, podemos considerar esse escoamento
como laminar, e como o comprimento total é de 25,4 metros, temos que:

60
ℎ𝑡𝑛 = 32 ∗ (878 ∗ 68 ∗ 10−6) ∗ 25,4 ∗1,56
878 ∗ 9,81 ∗ (1,5 ∗25,41000)
ℎ𝑡𝑛 = 0,23 𝑚 𝐻2𝑂 = 0,0225 𝑏𝑎𝑟
Ainda encontramos na tubulação os seguintes acidentes que possuem perdas de carga
especificas que devem ser adicionadas, como:
14 entradas
14 saídas
1 reduções
3 T’s rosqueados
2 Joelhos rosqueados
Realizaremos o cálculo das perdas de carga em cada acidente através do método direto, cuja
formula é dada a seguir.
ℎ𝑡𝑎 = 𝐾 ∗𝑉2
2 ∗ 𝑔
Segundo De Falco (1998), temos que os valores de K são:
Tabela 1: Acidentes sistema de movimentação
Acidentes Qtd. K Total
Entrada 14 0,5 7
Saída 14 1 14
Redução 1 0,01 0,01
T Rosqueado 3 1 3
Joelho 2 1,1 2,2
Total 26,21

61
Sendo assim, temos que a total de perda de carga por acidentes é:
ℎ𝑡𝑎 = 26,21 ∗1,562
2 ∗ 9,81= 3,25 𝑚 𝐻20 = 0,318 𝑏𝑎𝑟
Logo, a perda de carga total da tubulação é igual a:
ℎ𝑡 = ℎ𝑡𝑛 + ℎ𝑡𝑎 = 0,01128 + 0,318 = 0,32928 𝑏𝑎𝑟
6.1.2.2 Comando
Para atender requisitos de sistema, foi selecionado o comando da série VP 120 da fabricante
Vista Hydraulics. E, segundo o gráfico abaixo fornecido pelo fabricante, temos que a perda de
carga no comando é de 3,8 bar.
Figura 42: Gráfico comando VP 120

62
6.1.2.3 Válvula de Contrabalanço Dupla
Assim como o comando, para atender os requisitos do sistema hidráulico de movimentação,
foi selecionado a válvula CP441-2 da fabricante Comatrol. E, segundo o gráfico abaixo fornecido
pelo fabricante, temos que a perda de carga na válvula é de 22 bar.
Figura 43: Gráfico válvula CP441-2

63
6.1.2.4 Válvula Reguladora de Vazão
Assim como o comando e a válvula de contrabalanço, para atender os requisitos do sistema
hidráulico de movimentação, foi selecionado a válvula modelo 1633 da série 6F da fabricante
Parker. E, segundo o gráfico abaixo fornecido pelo fabricante, temos que a perda de carga na
válvula é de 1,9 bar.
Figura 44: Gráfico válvula de retenção modelo 1633
6.1.2.5 Trocador de calor
Foi selecionado o trocador de calor modelo VEH25B da fabricante Vista Hydraulics, e,
segundo o gráfico abaixo fornecido pelo fabricante, temos que a perda de carga na válvula é de 0,2
bar.

64
Figura 45: Gráfico trocador de calor Vista Hydraulics
6.1.2.6 Filtro
Foi selecionado o filtro da linha HR19 da fabricante Newtec, e, segundo o gráfico abaixo
fornecido pelo fabricante, temos que a perda de carga na válvula é de 0,19 bar.
Figura 46: Gráfico filtro HR19

65
6.1.2.7 Manômetros
A perda de carga nos manômetros pode ser considerada como nula.
Logo, a perda de carga total para o guincho principal, que consome a maior potência no
sistema de movimentação, está descrita na tabela a seguir.
Tabela 2: Perda de carga sistema de movimentação
Equipamentos Perda de Carga
(bar)
Tubulação 0,329
Comando 3,8
Válvula de Contrabalanço 22
Válvula Reguladora de Vazão 1,9
Trocador de Calor 0,2
Filtro 0,19
Manômetros 0
Total 28,419
66
6.2 Sistema de Bombeamento
Assim como o sistema de movimentação, iremos calcular os motores hidráulicos
necessários para atuar cada equipamento e em seguida calcularemos as respectivas perdas de carga
do sistema.
6.2.1 Motores
Tendo em vista que a bomba Tríplex é o equipamento que demanda maior potência no
sistema de movimentação, começaremos a análise por este equipamento. Para tal, necessitamos um
motor hidráulico que seja capaz de entregar um torque de 190,97 Nm e rotação de 750 rpm.
Analisando os tipos de motores mais comuns na indústria, verificamos que um motor hidráulico de
pistões radiais atende estes requisitos. Sendo assim, foi selecionado o motor MR 93 B da fabricante
Parker, conforme verificado pela tabela do fabricante.

67
Figura 47: Catálogo motor MR
Logo, para atingirmos os requisitos, o sistema hidráulico de movimentação deve ser capaz
de prover as seguintes vazões e pressões:
𝑉𝑎𝑧ã𝑜 = 750 ∗ (92,6
1000) = 69,45 𝑙/𝑚𝑖𝑛
𝑃𝑟𝑒𝑠𝑠ã𝑜 =190,97
1,5= 127,3 𝑏𝑎𝑟

68
Conhecendo a vazão e pressão máxima do sistema de bombeamento, para a bomba de
acionamento, necessito de um motor capaz de gerar 900 rpm de rotação e o seguinte torque:
𝑇𝑜𝑟𝑞𝑢𝑒 = 9.548,8 ∗7,834
900= 83,1 𝑁𝑚
De acordo com a tabela abaixo e analisando novamente os motores mais comuns na
indústria, foi selecionado o motor PGM 030 com largura de engrenagem de 1½” da fabricante
Parker.
Figura 48: Catálogo motor PGM 030
6.2.2 Perdas de Carga
Assim como no sistema de movimentação, o circuito hidráulico do sistema de
bombeamento também trabalha com o óleo mineral ISO VG 68. E, como a maior pressão
necessária no sistema é para acionar a bomba Tríplex, calcularemos somente as perdas de carga
referentes a esse equipamento. Logo, calcularemos as perdas de carga nos seguintes equipamentos:

69
18,1 metros de tubulação
01 comando
01 válvula reguladora de vazão
01 válvula de retenção
01 trocador de calor
01 filtro
02 manômetros
6.2.2.1 Tubulação
Atendendo os requisitos de vazão, pressão e fluido foi selecionado uma tubulação nova de
aço soldado com diâmetro interno de 1”. Assim como no sistema anterior, primeiramente
calcularemos a velocidade do fluido.
𝑉 = 4 ∗
(69,45 ∗ (1
60) ∗ (1
1000))
𝜋 ∗ (1 ∗25,41000
)2 = 2,28 𝑚/𝑠
E calculando o número de Reynolds, temos:
𝑅𝑒 =𝜌 ∗ 𝑉 ∗ 𝐷
𝜇
𝑅𝑒 =878 ∗ 2,28 ∗ (1 ∗
25,41000)
(878 ∗ 68 ∗ 10−6)= 851

70
Novamente, como o número de Reynolds é menor que 2000, consideramos o escoamento
como laminar, e como o comprimento total é de 18,1 metros, temos que:
ℎ𝑡𝑛 = 32 ∗ (878 ∗ 68 ∗ 10−6) ∗ 18,1 ∗2,28
878 ∗ 9,81 ∗ (1 ∗25,41000)
ℎ𝑡𝑛 = 0,36 𝑚 𝐻2𝑂 = 0,0353 𝑏𝑎𝑟
Ainda encontramos na tubulação os seguintes acidentes que possuem perdas de carga
especificas que devem ser adicionadas, como:
6 entradas
6 saídas
1 redução
3 T’s rosqueados
1 joelho rosqueado
Realizaremos o cálculo das perdas de carga em cada acidente através do método direto, cuja
formula é dada a seguir.
ℎ𝑡𝑎 = 𝐾 ∗𝑉2
2 ∗ 𝑔
71
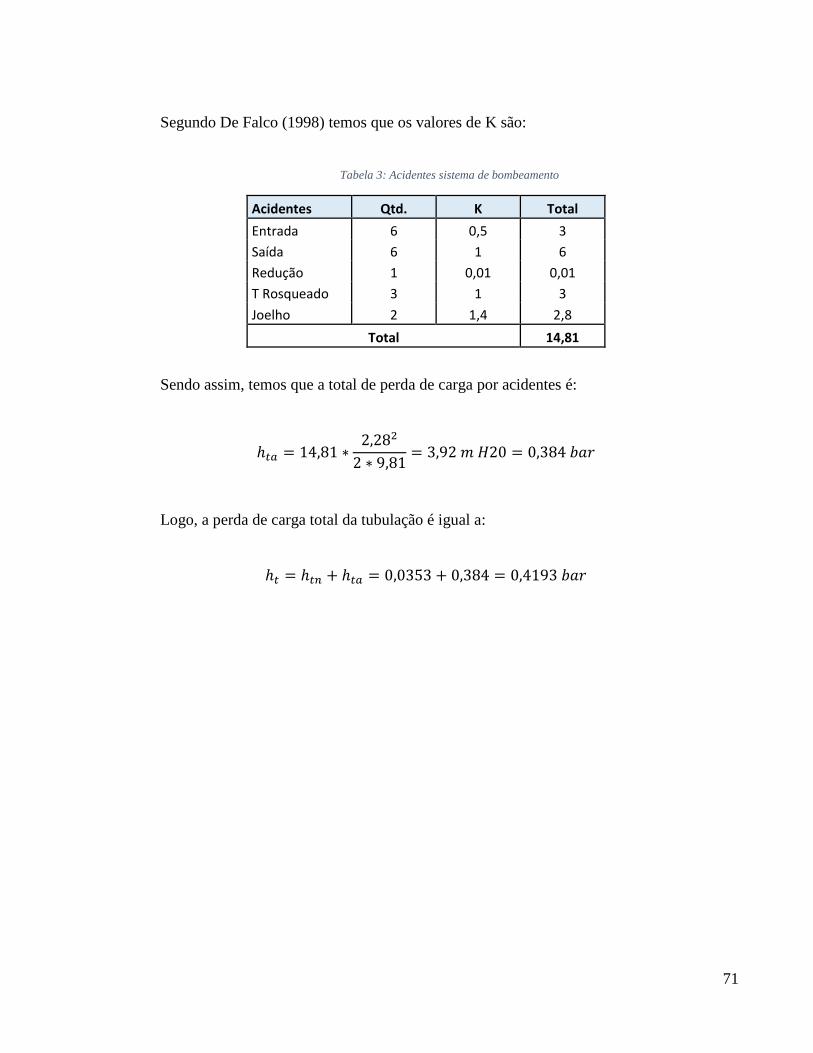
Segundo De Falco (1998) temos que os valores de K são:
Tabela 3: Acidentes sistema de bombeamento
Acidentes Qtd. K Total
Entrada 6 0,5 3
Saída 6 1 6
Redução 1 0,01 0,01
T Rosqueado 3 1 3
Joelho 2 1,4 2,8
Total 14,81
Sendo assim, temos que a total de perda de carga por acidentes é:
ℎ𝑡𝑎 = 14,81 ∗2,282
2 ∗ 9,81= 3,92 𝑚 𝐻20 = 0,384 𝑏𝑎𝑟
Logo, a perda de carga total da tubulação é igual a:
ℎ𝑡 = ℎ𝑡𝑛 + ℎ𝑡𝑎 = 0,0353 + 0,384 = 0,4193 𝑏𝑎𝑟

72
6.2.2.2 Comando
Para atender requisitos de sistema, foi selecionado o comando da série VP 80 da fabricante
Vista Hydraulics. E, segundo o gráfico abaixo fornecido pelo fabricante, temos que a perda de
carga no comando é de 3,1 bar.
Figura 49: Gráfico comando VP 80

73
6.2.2.3 Válvula Reguladora de Vazão
Para atender os requisitos do sistema hidráulico de bombeamento, foi selecionado a válvula
modelo 1227 da série 6F da fabricante Parker. E, segundo o gráfico abaixo fornecido pelo
fabricante, temos que a perda de carga na válvula é de 3,6 bar.
Figura 50: Gráfico reguladora de vazão modelo 1227

74
6.2.2.4 Válvula Retenção
Novamente, para atender os requisitos do sistema hidráulico, foi selecionado a válvula
modelo 1600 da série C da fabricante Parker. E, segundo o gráfico abaixo fornecido pelo fabricante,
temos que a perda de carga na válvula é de 4,7 bar.
Figura 51: Gráfico válvula de retenção modelo 1600

75
6.2.2.5 Trocador de calor
Foi selecionado o trocador de calor modelo VEH14A da fabricante Vista Hydraulics, e,
segundo o gráfico abaixo fornecido pelo fabricante, temos que a perda de carga na válvula é de
0,75 bar.
Figura 52: Gráfico trocador de calor Vista Hydraulics

76
6.2.2.6 Filtro
Foi selecionado o filtro da linha HR19 da fabricante Newtec, e, segundo o gráfico abaixo
fornecido pelo fabricante, temos que a perda de carga na válvula é de 0,23 bar.
Figura 53: Gráfico filtro HR 19
6.2.2.7 Manômetros
A perda de carga nos manômetros pode ser considerada como nula.

77
Logo, a perda de carga total para o acionamento da bomba Tríplex, que consome a maior
potência no sistema de bombeamento, está descrita na tabela a seguir.
Tabela 4: Perda de carga sistema de bombeamento
Equipamentos Perda de Carga
(bar)
Tubulação 0,42
Comando 3,1
Válvula Reguladora de Vazão 3,6
Válvula Retenção 4,7
Trocador de Calor 0,75
Filtro 0,23
Manômetros 0
Total 12,8

78
6.3 Sistema de Posicionamento
No sistema de posicionamento, como os cilindros foram requisitos do projeto e não há
motores neste circuito hidráulico, iremos calcular primeiramente as vazões e pressões de cada
cilindro e depois as respectivas perdas de carga do sistema.
6.3.1 Cilindros
Como o dimensionamento dos cilindros foram requisitos de projeto, segue tabela com as
devidas pressões e vazões:
Tabela 5: Cilindros sistema de posicionamento
Cilindros Patola Cilindros Mastro Cilindros Pescoço
de Ganso
Dia. Êmbolo (mm) 150 150 70
Dia. Haste (mm) 80 80 50
Curso (mm) 2.000 1.900 700
Carga (kgf) 8.000 7.000 2.500
Velocidade (m/s) 0,0111 0,00633 0,01166
Pressão (bar) 44,41 38,86 63,73
Vazão (l/min) 47,08 26,85 10,77
6.3.2 Perdas de Carga
Assim como nos sistemas anteriores, o circuito hidráulico do sistema de posicionamento
também trabalha com o óleo mineral ISO VG 68. E, como a maior pressão e vazão necessárias no
sistema são para acionar o cilindro da patola, calcularemos somente as perdas de carga referentes
a este atuador. Logo, calcularemos as perdas de carga nos seguintes equipamentos:

79
37,3 metros de tubulação
01 comando
03 válvulas de retenção
01 trocador de calor
01 filtro
02 manômetros
6.3.2.1 Tubulação
Atendendo os requisitos de vazão, pressão e fluido foi selecionado uma tubulação nova de
aço soldado com diâmetro interno de ¾”. Assim como no sistema anterior, primeiramente
calcularemos a velocidade do fluido.
𝑉 = 4 ∗
(47,08 ∗ (1
60) ∗ (1
1000))
𝜋 ∗ (0,75 ∗25,41000)
2 = 2,75 𝑚/𝑠
E calculando o número de Reynolds, temos:
𝑅𝑒 =𝜌 ∗ 𝑉 ∗ 𝐷
𝜇
𝑅𝑒 =878 ∗ 2,75 ∗ (0,75 ∗
25,41000)
(878 ∗ 68 ∗ 10−6)= 770
Novamente, como o número de Reynolds é menor que 2000, consideramos o escoamento
como laminar, e como o comprimento total é de 37,3 metros, temos que:

80
ℎ𝑡𝑛 = 32 ∗ (878 ∗ 68 ∗ 10−6) ∗ 37,3 ∗2,75
878 ∗ 9,81 ∗ (0,75 ∗25,41000)
ℎ𝑡𝑛 = 1,19 𝑚 𝐻2𝑂 = 0,116 𝑏𝑎𝑟
Ainda encontramos na tubulação os seguintes acidentes que possuem perdas de carga
especificas que devem ser adicionadas, como:
10 entradas
10 saídas
4 reduções
1 T’s rosqueados
4 joelhos rosqueados
Realizaremos o cálculo das perdas de carga em cada acidente através do método direto, cuja
formula é dada a seguir.
ℎ𝑡𝑎 = 𝐾 ∗𝑉2
2 ∗ 𝑔
Segundo De Falco (1998), temos que os valores de K são:
Tabela 6: Acidentes sistema de posicionamento
Acidentes Qtd. K Total
Entrada 10 0,5 5
Saída 10 1 10
Redução 4 0,01 0,04
T Rosqueado 1 1 1
Curva 4 1,7 6,8
Total 22,84

81
Sendo assim, temos que a total de perda de carga por acidentes é:
ℎ𝑡𝑎 = 17,12 ∗2,752
2 ∗ 9,81= 8,80 𝑚 𝐻20 = 0,862 𝑏𝑎𝑟
Logo, a perda de carga total da tubulação é igual a:
ℎ𝑡 = ℎ𝑡𝑛 + ℎ𝑡𝑎 = 0,116 + 0,862 = 0,978 𝑏𝑎𝑟
6.3.2.2 Comando
Para atender requisitos de sistema, foi selecionado o comando da série VP 80 da fabricante
Vista Hydraulics. E, segundo o gráfico abaixo fornecido pelo fabricante, temos que a perda de
carga no comando é de 3,5 bar.
Figura 54: Gráfico comando VP 80

82
6.3.2.3 Válvula Retenção
Novamente, para atender os requisitos do sistema hidráulico, foi selecionado a válvula
modelo 1200 da série C da fabricante Parker. E, segundo o gráfico abaixo fornecido pelo fabricante,
temos que a perda de carga na válvula é de 7,3 bar.
Figura 55: Gráfico válvula de retenção modelo 1200
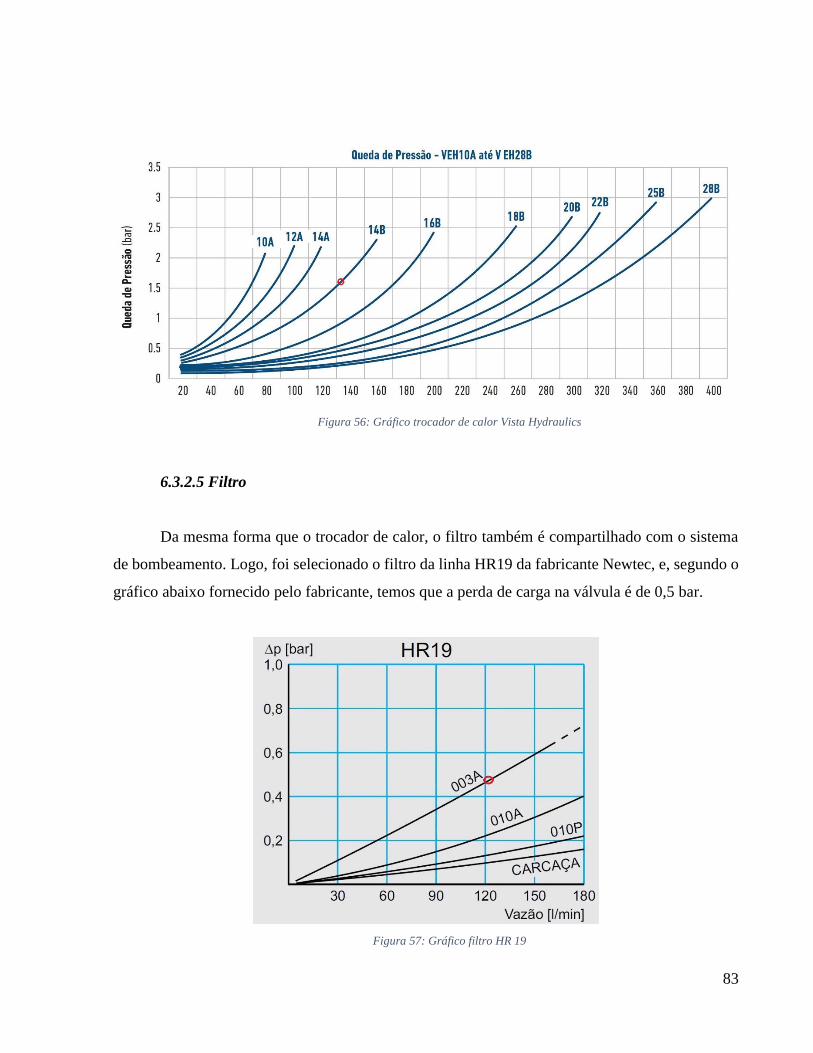
6.3.2.4 Trocador de calor
Como o trocador de calor é compartilhado com o do sistema de bombeamento, temos que
o trocador de calor selecionado é o modelo VEH14A da fabricante Vista Hydraulics. Adicionando
a vazão do sistema de bombeamento e, segundo o gráfico abaixo fornecido pelo fabricante, temos
que a perda de carga na válvula é de 1,6 bar.
83
Figura 56: Gráfico trocador de calor Vista Hydraulics
6.3.2.5 Filtro
Da mesma forma que o trocador de calor, o filtro também é compartilhado com o sistema
de bombeamento. Logo, foi selecionado o filtro da linha HR19 da fabricante Newtec, e, segundo o
gráfico abaixo fornecido pelo fabricante, temos que a perda de carga na válvula é de 0,5 bar.
Figura 57: Gráfico filtro HR 19
84
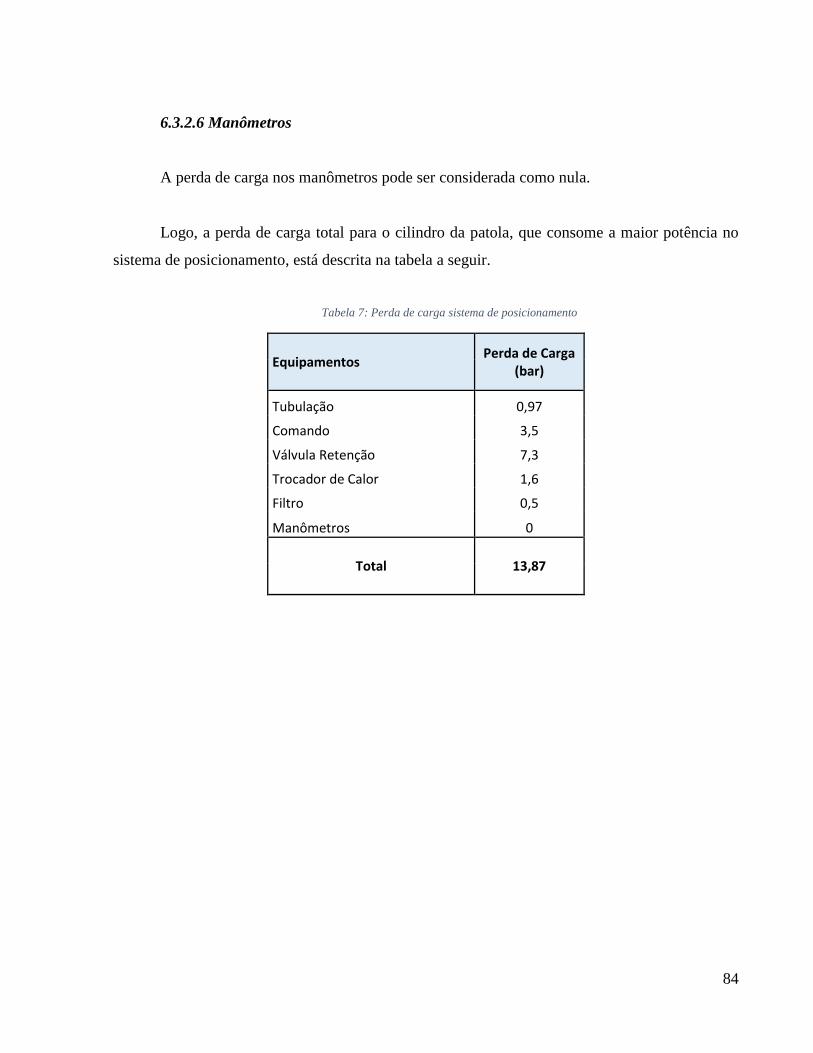
6.3.2.6 Manômetros
A perda de carga nos manômetros pode ser considerada como nula.
Logo, a perda de carga total para o cilindro da patola, que consome a maior potência no
sistema de posicionamento, está descrita na tabela a seguir.
Tabela 7: Perda de carga sistema de posicionamento
Equipamentos Perda de Carga
(bar)
Tubulação 0,97
Comando 3,5
Válvula Retenção 7,3
Trocador de Calor 1,6
Filtro 0,5
Manômetros 0
Total 13,87

85
6.4 Bombas
Para calcular as bombas necessárias devemos analisar os requisitos de cada sistema da
Unidade Integrada de Jateamento que se encontram resumidos na tabela X.
Tabela 8: Resumo pressões e vazões dos sistemas
Sistema de Movimentação
Sistema de Bombeamento
Sistema de Posicionamento
Pressão (bar) 212,3 140,1 58,3
Vazão (l/min) 106,5 69,5 47,1
Por requisito do projeto, como devemos acionar os sistemas através de um motor Diesel,
optamos por utilizar uma única bomba de unidades múltiplas acoplada diretamente ao eixo do
motor, funcionando como três bombas independentes, mas sempre com a mesma rotação definida
pelo motor. Desta forma, considerando que o motor diesel trabalhará com 1.700 rpm,
selecionamos as seguintes bombas da série PGP 350 da fabricante Parker, de acordo com o
catalogo a seguir:
Sistema de Movimentação: PGP 350 – 1½”
Sistema de Bombeamento: PGP 350 – 1”
Sistema de Posicionamento: PGP 350 – ¾”

86
Figura 58: Catálogo bomba PGP
E, como toda potência consumida é alimentada através de um eixo motriz comum, a mesma
é limitada pela resistência mecânica do eixo. Para definir esta limitação de potência, usamos o fator
“PL”, sendo “P” a pressão de trabalho e “L” a soma da largura das engrenagens. Para unidades
múltiplas é necessário calcular o fator PL para cada secção da unidade, analisando a somatória para
cada eixo de ligação considerado e para o eixo de entrada, temos que:

87
𝑃𝐿 = ∑ 𝑃𝑟𝑒𝑠𝑠ã𝑜 (𝑝𝑠𝑖) 𝑥 𝐿𝑎𝑟𝑔𝑢𝑟𝑎 𝐸𝑛𝑔𝑟𝑒𝑛𝑎𝑔𝑒𝑚 (𝑝𝑜𝑙. )
𝑃𝐿𝐸𝑖𝑥𝑜 𝑀𝑜𝑡𝑟𝑖𝑧 = (1,5 ∗ (14,5 ∗ 212,3)) + (1 ∗ (14,5 ∗ 140,3)) + (0,75 ∗ (14,5 ∗ 58,1))
𝑃𝐿𝐸𝑖𝑥𝑜 𝑀𝑜𝑡𝑟𝑖𝑧 = 7283,7
𝑃𝐿𝐸𝑖𝑥𝑜 𝐿𝑖𝑔𝑎çã𝑜 = (1 ∗ (14,5 ∗ 140,3)) + (0,75 ∗ (14,5 ∗ 58,1)) = 2666,2
E, comparando-as com a capacidade nominal para cada tipo de eixo, verificamos que o eixo
chavetado SAE “C” atende as especificações, conforme tabela abaixo.
Figura 59: Tabela eixos bomba PGP 350
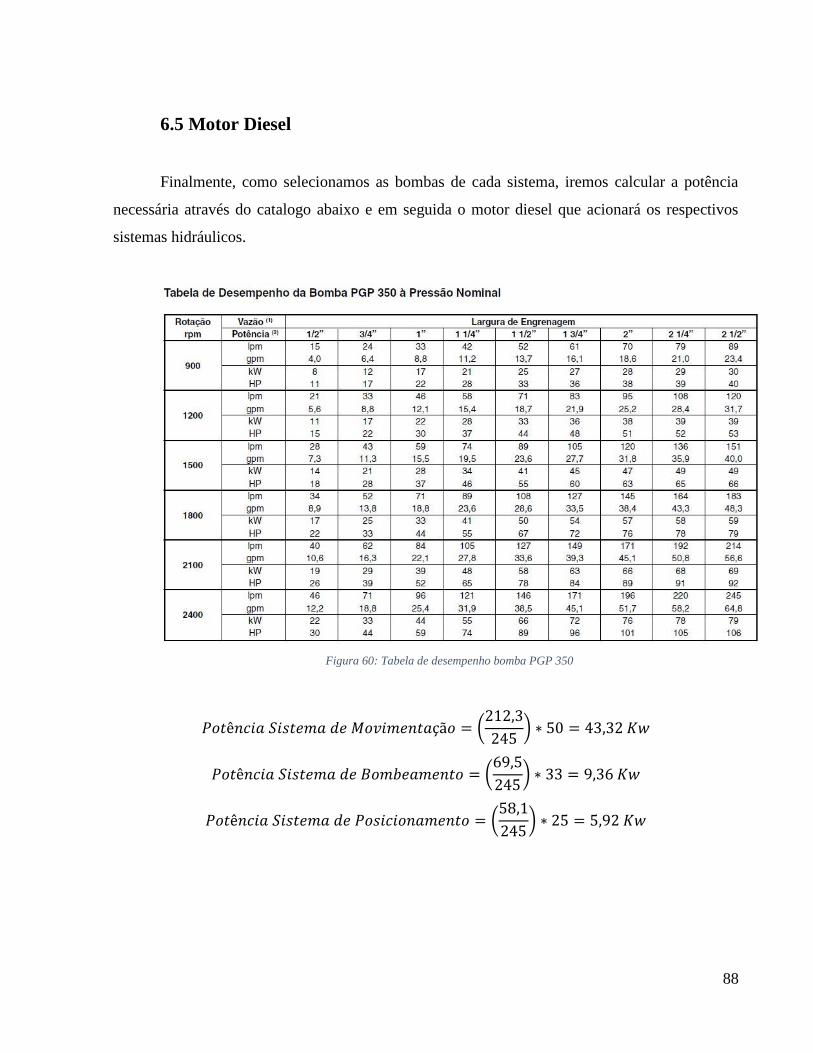
88
6.5 Motor Diesel
Finalmente, como selecionamos as bombas de cada sistema, iremos calcular a potência
necessária através do catalogo abaixo e em seguida o motor diesel que acionará os respectivos
sistemas hidráulicos.
Figura 60: Tabela de desempenho bomba PGP 350
𝑃𝑜𝑡ê𝑛𝑐𝑖𝑎 𝑆𝑖𝑠𝑡𝑒𝑚𝑎 𝑑𝑒 𝑀𝑜𝑣𝑖𝑚𝑒𝑛𝑡𝑎çã𝑜 = (212,3
245) ∗ 50 = 43,32 𝐾𝑤
𝑃𝑜𝑡ê𝑛𝑐𝑖𝑎 𝑆𝑖𝑠𝑡𝑒𝑚𝑎 𝑑𝑒 𝐵𝑜𝑚𝑏𝑒𝑎𝑚𝑒𝑛𝑡𝑜 = (69,5
245) ∗ 33 = 9,36 𝐾𝑤
𝑃𝑜𝑡ê𝑛𝑐𝑖𝑎 𝑆𝑖𝑠𝑡𝑒𝑚𝑎 𝑑𝑒 𝑃𝑜𝑠𝑖𝑐𝑖𝑜𝑛𝑎𝑚𝑒𝑛𝑡𝑜 = (58,1
245) ∗ 25 = 5,92 𝐾𝑤

89
Logo, para o cálculo da potência máxima necessária, temos que:
𝑃𝑜𝑡ê𝑛𝑐𝑖𝑎 𝑀á𝑥. = ∑ 𝑃𝑜𝑡ê𝑛𝑐𝑖𝑎 𝑆𝑖𝑠𝑡𝑒𝑚𝑎𝑠
𝑃𝑜𝑡ê𝑛𝑐𝑖𝑎 𝑀á𝑥. = 43,32 + 9,36 + 5,92 = 58,6 𝐾𝑤
E, para selecionarmos o motor diesel, iremos multiplicar a potência máxima por um
coeficiente de rendimento, no valor de 125%. Esse coeficiente é utilizado para suprir as possíveis
perdas de potência entre o motor diesel a as bombas hidráulicas acopladas. Desta forma, temos:
𝑃𝑜𝑡ê𝑛𝑐𝑖𝑎 𝑀𝑜𝑡𝑜𝑟 𝐷𝑖𝑒𝑠𝑒𝑙 = 1,25 ∗ 58,6 = 73,25 𝐾𝑤
De acordo com o fabricante, o motor diesel necessário para impulsionar o sistema é o
modelo 229-6 N (linha industrial). A figura a seguir informar os dados do motor diesel, bem
como as outras opções do fabricante.
Figura 61: Tabela motor diesel MWM - Linha Industrial

90
7 Conclusão
Através da metodologia aplicada neste trabalho, concluímos que o circuito hidráulico para
a Unidade Integrada de Jateamento foi projetado de acordo com os requisitos operacionais
apresentados para intervenções em poços de petróleo, trabalhando com equipamentos presentes na
indústria. O fato de integrarmos os circuitos hidráulicos dos três sistemas representa uma enorme
otimização dos sistemas, pois trabalhamos apenas com um motor diesel e uma bomba múltipla,
sem interferir nas operações de intervenção, visto que os sistemas operam de forma independente.
A Unidade Integrada de Jateamento, após passar por uma rigorosa fase de
comissionamento, encontra-se operando com o circuito hidráulico projetado neste trabalho.
Embora o circuito hidráulico esteja operando perfeitamente e com alto grau de
confiabilidade, em um trabalho futuro recomenda-se um estudo para aumentar o grau
automatização da Unidade Integrada de Jateamento, acrescentando válvulas acionadas por
solenoides e comandadas por controladores lógicos programáveis (PLC) e também a adição de
sensores para medição e estudo de indicadores importantes para as operações de intervenção, como
pressão, vazão e temperatura do circuito. Vale a pena ressaltar, que este estudo deve envolver
conhecimentos avançados em automação pois a unidade opera em zonas com atmosfera explosiva,
requisitando equipamentos específicos para manter o alto grau de segurança das operações.

91
8 Bibliografia
[1] DE MATTOS, E.E., DE FALCO, R., Bombas Industriais, 2 ed., Rio de Janeiro, Editora
Interciência, 1998.
[2] FOX, R.W., PRITCHARD, P.J., MCDONALD, A.T., Introdução à Mecânica dos Fluidos, 7
ed., Rio de Janeiro, Editora LTC, 2010.
[3] EXNER, H., FREITAG, R., GEIS, I., H., et al. Hidráulica Básica, 3.1 ed., São Paulo, Bosch
Rexroth AG, 2005.
[4] Tecnologia Hidráulica Industrial, apostila M2001-1 BR, São Paulo, Parker Hannifin, 1999.
[5] GOMES, M. R., ANDRADE, M., FERRAZ, F., Apostila de Hidráulica, Bahia, Centro Federal
de Educação Tecnológica da Bahia, 2008.
[6] BUDYNAS, R. G., NISBETT, J. K., Elementos de Máquinas de Shigley, 8 ed., Porto Alegre,
Editora McGraw-Hill, 2011.
[7] SMITH, P., ZAPPE, R. W., Valve selection Handbook, 5 ed., Oxford, Editora Elsevier, 2004.
[8] THOMAS, J. E., Fundamentos da Engenharia de Petróleo, 2 ed., Rio de Janeiro, Editora
Interciência, 2004.
[9] Hammelmann – Products – High Pressure Pumps – HPD 20 – Details. Disponível em:
<http://www.hammelmann.de/us/produkte/hochdruckpumpen/uebersicht/hdp-20/hdp-20-
details.php>
[10] MWM Motores Industriais. Disponível em: < http://www.mwm.com.br/site.aspx/Industrial>
[11] Vista Hydraulics. Disponível em: < http://www.vistahydraulics.com.br/produtos.php>
[12] Parker – Produtos. Disponível em: < http://ph.parker.com/br/pt/products>
[13] Sauer Danfoss – Products – Orbital Motors.
Disponível em: < http://powersolutions.danfoss.com/products/orbital-motors/>
[14] Filtros Newtec – Produtos – Filtros de Retorno.
Disponível em: < http://www.filtrosnewtec.com.br/index.php/produtos/31-filtros-de-retorno>
[15] Comatrol – Produtos. Disponível em: <http://www.comatrol.com/products>