projeto de robo para automatizac˘^ ao de testes~...
TRANSCRIPT

PROJETO DE ROBO PARA AUTOMATIZACAO DE TESTES
EM MAQUINAS DE CARTAO DE CREDITO
Luciano Vargas dos Santos
Projeto de Graduacao apresentado ao Curso
de Engenharia Eletronica e de Computacao
da Escola Politecnica, Universidade Federal
do Rio de Janeiro, como parte dos requisitos
necessarios a obtencao do tıtulo de Enge-
nheiro.
Orientadores: Heraldo Luıs Silveira de Almeida
Flavio Luis de Mello
Rio de Janeiro
Setembro de 2018



UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
Escola Politecnica - Departamento de Eletronica e de Computacao
Centro de Tecnologia, bloco H, sala H-217, Cidade Universitaria
Rio de Janeiro - RJ CEP 21949-900
Este exemplar e de propriedade da Universidade Federal do Rio de Janeiro, que
podera incluı-lo em base de dados, armazenar em computador, microfilmar ou adotar
qualquer forma de arquivamento.
E permitida a mencao, reproducao parcial ou integral e a transmissao entre bibli-
otecas deste trabalho, sem modificacao de seu texto, em qualquer meio que esteja
ou venha a ser fixado, para pesquisa academica, comentarios e citacoes, desde que
sem finalidade comercial e que seja feita a referencia bibliografica completa.
Os conceitos expressos neste trabalho sao de responsabilidade do(s) autor(es).
iv

DEDICATORIA
Ao meu amigo e primo Vinıcius (in memoriam), pelos momentos que pudemos
viver ate o inıcio dessa jornada e pelo exemplo que ficara para sempre.
v

AGRADECIMENTO
Agradeco primeiramente a minha famılia pelo apoio e por acreditarem em
mim, dando total liberdade as minhas escolhas e ao meu tempo.
A equipe de robotica UFRJ MinervaBots que me presenteou com uma se-
gunda famılia e verdadeiros amigos e me proporcionou grandes aprendizados, me
ensinando sobretudo o que e espırito de equipe.
Agradeco tambem aos meus colegas de trabalho da Stone Pagamentos, por
permitir o uso do espaco para desenvolvimento desse projeto e permitir a divulgacao
com codigo aberto. E sobretudo pelo confianca e autonomia pra tocar o projeto e
fazer acontecer.
vi

RESUMO
O presente trabalho tem como objetivo proporcionar um ambiente para tes-
tes funcionais em maquinas de cartao de credito, assegurando maior qualidade no
desenvolvimento de software para esse tipo de sistema embarcado. Esses terminais
de pagamento, denominados Point of Sale (POS), possuem especificacoes de segu-
ranca que impoem limitacoes a testes realizados somente por software. Duas dessas
limitacoes sao: os dados de um cartao de chip nao podem ser emulados por soft-
ware, e necessaria a presenca de um cartao fısico; e a insercao de senha do cartao
tambem so possıvel via interacao fısica com o teclado do terminal. Para permitir
preencher essas lacunas para um teste totalmente automatizado, foi desenvolvido um
robo capaz interagir fisicamente com o teclados de terminais POS e realizar insercao
e remocao de cartoes utilizando atuadores. Outros tipos de interacoes de usuario
com aplicacoes do terminal foram automatizadas via software com a ferramenta
Selenium. Nesse trabalho sao descritos o projeto e implementacoes de software,
as ferramentas para configuracao do ambiente de testes e o projeto mecanico do
prototipo do robo. Por fim, serao apresentados os resultados obtidos com exemplos
de cenarios de teste automatizado em aplicacao de pagamento sem necessidade de
interacao humana com o terminal.
Palavras-Chave: robotica, teste de software, garantia de qualidade.
vii

ABSTRACT
The goal of current work is provide an environment for functional testing in credit
card machines, ensuring greater quality on software developing on this kind of em-
bedded system. These payment terminals, knowns as Point of Sale (POS), has some
safety standards that limits tests to be performed only by software. Two of this
limitations are: the data of card chips can’t be emulated by software, it is manda-
tory the presence of a physical card; and the card password also is only possible by
physical interaction with terminal’s keyboard. To overcome these limitations and
allow perform functional testing fully automated, was designed a robot capable of
act physically with POS terminals for card insertion and removal and also for key-
board entry using actuators. Another kinds of user interactions with the terminal
could be performed by software using the Selenium tool. This work describes the
software project and its implementation, the tools used for performing automated
tests and also the mechanical project of the robot prototype. Finally, is presented
the obtained results with exemples of automated test cases in a payment application
without the need of human interaction.
Key-words: robotics, software testing, quality assurance.
viii
SIGLAS
API - Application Programming Interface
CAD - Computer Aided Design ou Desenho Assistido por Computador
CNC - Comando Numerico Computadorizado
EMV - Especificacao de pagamento criada pela Europay, MasterCard e Visa
FDM - Fused Deposition Modeling
IDE - Integrated Development Environment
PCI DSS - Payment Card Industry Data Security Standards
TFT LCD - Thin Film Transistor Liquid Crystal Display
PIN - Personal Identification Number
PLA - Poliacido Lactico
POS - Point Of Sale ou Ponto de Venda
PWM - Pulse Width Modulation
QA - Quality Assurance
ix

RX - Receiver
SWIG - Simplified Wrapper and Interface Generator
TX - Transmitter
UART - Universal Asynchronous Receiver-Transmitter
UML - Unified Modeling Language ou Linguagem de Modelagem Unificada
USB - Universal Serial Bus
x

Sumario
Lista de Figuras xiii
Lista de Tabelas xv
1 Introducao 1
1.1 Tema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Delimitacao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.3 Justificativa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.4 Objetivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.5 Metodologia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.6 Descricao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2 Tecnologias e Ferramentas 5
2.1 C++ e Qt Framework . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.2 Testes de Software . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.2.1 Modelo caixa-preta e testes funcionais . . . . . . . . . . . . . 6
2.2.2 Selenium WebDriver . . . . . . . . . . . . . . . . . . . . . . . 7
2.3 Arduino . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.4 Impressao 3D . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.5 Point of Sales (POS) . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.6 Aplicacao de Pagamento . . . . . . . . . . . . . . . . . . . . . . . . . 17
3 Descricao do Projeto 21
3.1 Diagrama de classes . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.1.1 PosTestTool . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
3.1.2 CardController . . . . . . . . . . . . . . . . . . . . . . . . . . 22
xi

3.1.3 KeyboardController . . . . . . . . . . . . . . . . . . . . . . . . 23
3.1.4 PrinterController . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.1.5 PosObject e KeyMap . . . . . . . . . . . . . . . . . . . . . . . 23
3.1.6 PosObjectFactory e PosModel . . . . . . . . . . . . . . . . . . 23
3.1.7 AtCore . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.2 Controle da impressora 3D . . . . . . . . . . . . . . . . . . . . . . . . 24
3.3 Controle do teclado . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
3.4 Insercao e remocao de cartao . . . . . . . . . . . . . . . . . . . . . . . 39
3.5 Biblioteca Python . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
4 Testes e Resultados Experimentais 51
5 Conclusao 58
5.1 Conclusoes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
5.2 Trabalhos Futuros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
Bibliografia 61
A Codigo Arduino 64
xii

Lista de Figuras
1.1 EFTPOS Terminal Testing Robot fornecido pela Abrantix®. . . . . . . . 3
2.1 Representacao do modelo de testes caixa-preta. . . . . . . . . . . . . . . 7
2.2 Imagem capturada de pesquisa com Google usando Selenium. . . . . . . . 8
2.3 Alguns modelos do Arduino. . . . . . . . . . . . . . . . . . . . . . . . . 9
2.4 Exemplos de modulos de sensores. . . . . . . . . . . . . . . . . . . . . . 10
2.5 Arduino Uno com shield ethernet. . . . . . . . . . . . . . . . . . . . . . 10
2.6 Arduino Uno. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.7 Impressora 3D Anet® A6. . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.8 POS modelo PAX® S920 distribuıdo pela Stone Pagamentos® S.A. . . . 16
2.9 Modelo PAX® S920 com o MAMBA em execucao. . . . . . . . . . . . . 18
2.10 web inspector do navegador Chromium na aplicacao de pagamento do
MAMBA. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.11 exemplos de paginas da aplicacao de pagamento. . . . . . . . . . . . . . 19
2.12 Diagrama de sequencia da aplicacao de pagamento. . . . . . . . . . . . . 20
3.1 Diagrama de classe da biblioteca PosTestTool. . . . . . . . . . . . . . . . 22
3.2 Diagrama de classes simplificado do controle da impressora 3D. . . . . . . 25
3.3 Vista lateral do terminal PAX® S920 mostrando inclinacao do plano do
teclado. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
3.4 Modelo da base de apoio do POS. . . . . . . . . . . . . . . . . . . . . . 29
3.5 POS PAX® S920 posicionado sobre a base de apoio. . . . . . . . . . 29
3.6 Modelagem da peca que prende a caneta capacitiva a impressora 3D. . . . 30
3.7 foto mostrando acoplamento da caneta a impressora 3D. . . . . . . . . . 30
3.8 Visao frontal do aparato. . . . . . . . . . . . . . . . . . . . . . . . . . . 31
3.9 Modelo 3D da peca que limita o fim de curso do eixo Z. . . . . . . . . . . 32
xiii

3.10 Peca que limita o fim de curso do eixo Z em foto do projeto real. . . . . . 33
3.11 Foto do projeto real proximo ao botao de fim de curso do eixo Z. . . . . . 33
3.12 Diagrama de classes que implementam atuador do teclado. . . . . . . . . 34
3.13 Exemplo de diferencas no layout do teclado. . . . . . . . . . . . . . . . . 35
3.14 Ilustracao do sistemas de coordenadas do referencial do POS. . . . . . . . 36
3.15 Visao lateral do modelo 3d do atuador linear. . . . . . . . . . . . . . . . 39
3.16 Atuador linear impresso em PLA. . . . . . . . . . . . . . . . . . . . . . 40
3.17 Modelo 3D da peca que prende cartoes de credito. . . . . . . . . . . . . . 40
3.18 aparato completo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
3.19 cartao fixado ao atuador. . . . . . . . . . . . . . . . . . . . . . . . . . . 41
3.20 Esquema da ligacao eletronica do servo com o Arduino. . . . . . . . . . . 42
3.21 vista lateral, arduino fixado ao aparato. . . . . . . . . . . . . . . . . . . 43
3.22 Pinos de comunicacao serial do Arduino. . . . . . . . . . . . . . . . . . . 44
3.23 Resposta serial da aplicacao do Arduino. . . . . . . . . . . . . . . . . . . 46
3.24 Diagrama sequencial da insercao de cartao. . . . . . . . . . . . . . . . . 48
4.1 Aplicacao para teste da API do robo. . . . . . . . . . . . . . . . . . . . 51
4.2 Posicoes do cartao em resposta aos metodos de insercao e remocao. . . . . 52
4.3 Diagrama do ambiente de testes. . . . . . . . . . . . . . . . . . . . . . . 53
4.4 Capturas de tela realizas em teste automatizado. . . . . . . . . . . . . . 56
xiv

Lista de Tabelas
2.1 Caracterısticas do Arduino Uno [1]. . . . . . . . . . . . . . . . . . . . 12
2.2 Caracterısticas da impressora 3D Anet® A6 [2]. . . . . . . . . . . . . 14
2.3 PAX® S920 distribuıdo pela Stone Pagamentos® S.A. . . . . . . . . 17
3.1 Lista de firmwares suportados pelo AtCore[3]. . . . . . . . . . . . . . 24
4.1 Tempo de execucao de transacao usando a PosTestTool. . . . . . . . . 57
xv
Capıtulo 1
Introducao
1.1 Tema
O tema deste projeto e a automatizacao de testes funcionais em aplicacoes de
maquinas de cartao de credito. Assim, e descrito o projeto um robo com atuadores
capaz de realizar insercao e remocao de cartoes e tambem pressionamento de teclas
nas maquinas de cartao.
1.2 Delimitacao
O objeto de estudo desse trabalho sao terminais POS (Point of Sales ou
Ponto de Venda). Portanto o robo para testes e projetado para se adequar a esse
tipo de dispositivo. Vale tambem ressaltar que o intuito do projeto e ter um robo
para atuar sobre uma variedade de dispositivos desse tipo, entretanto a fim de se
ter uma prova de conceito, parte do projetos ficou delimitado para atender a apenas
um modelo de POS.
1.3 Justificativa
Para se colocar um software em producao com um mınimo de qualidade e
necessario a realizacao de testes para encontrar o maximo de erros possıvel e corrigi-
los antes que possam causar uma ma experiencia para o usuario final.
Testes de software quando feitos de maneira manual podem ser bastante cus-
1

tosos por exigir muitas horas de trabalho e tambem podem incorrer em muitos erros
por se tratarem de tarefas longas e repetitivas, estando o trabalhador sujeito ao
cansaco e eventual distracao no processo. Assim, sempre que possıvel, a automa-
tizacao de testes de software garante maior consistencia e confiabilidade uma vez
que uma rotina de testes, se bem implementada, sera executada da mesma forma.
Em dispositivos POS e necessaria interacao fısica com o dispositivo para
realizacao de um pagamento. Portanto, para completa automatizacao de testes, e
necessario o uso de atuadores roboticos para realizacao de tarefas como insercao de
cartao de credito e digitacao com o teclado do dispositivo. Dessa forma, o projeto
desenvolvido nesse trabalho se torna uma ferramenta importante para garantia da
qualidade de software de dispositivos POS, permitindo testes mais consistentes e
sem necessidade de interacao humana.
1.4 Objetivos
O presente projeto tem intuito de fornecer um robo como ferramenta para
testes automatizados em maquinas de cartao de credito a fim de garantir maior
qualidade no desenvolvimento de softwares para esse tipo de dispositivo. Dessa
forma, tem-se como objetivos especıficos:
• Construir um robo capaz de inserir, remover cartoes de credito e pressionar
teclas.
• Projetar uma arquitetura de software do robo.
• Fornecer como ferramenta para analistas de teste uma API (Application Pro-
gramming Interface) para controle do robo.
1.5 Metodologia
Primeiramente foi feita uma pesquisa de produtos disponıveis no mercado para
solucao do problema. As solucoes encontradas utilizam bracos roboticos ou sistema
de controle de 3 eixos para acionamento das teclas de dispositivos POS e a solucao
que mais se aproximou da proposta foi o EFTPOS Terminal Testing Robot fornecido
2
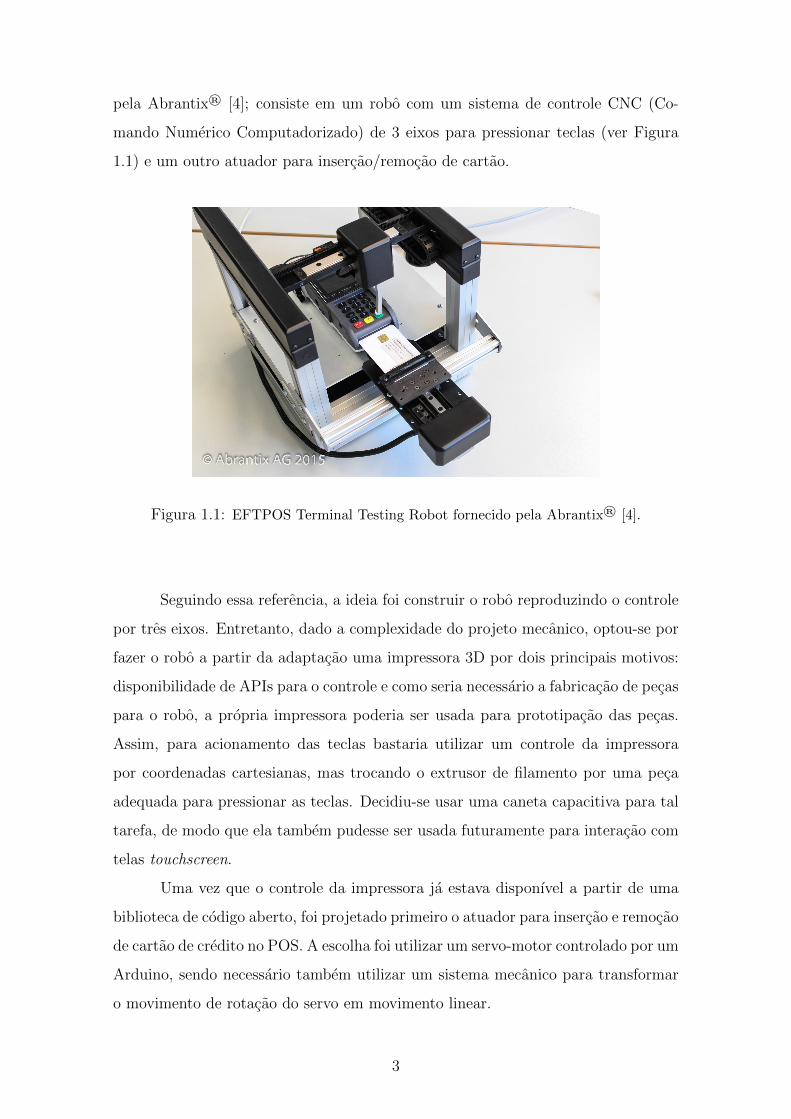
pela Abrantix® [4]; consiste em um robo com um sistema de controle CNC (Co-
mando Numerico Computadorizado) de 3 eixos para pressionar teclas (ver Figura
1.1) e um outro atuador para insercao/remocao de cartao.
Figura 1.1: EFTPOS Terminal Testing Robot fornecido pela Abrantix® [4].
Seguindo essa referencia, a ideia foi construir o robo reproduzindo o controle
por tres eixos. Entretanto, dado a complexidade do projeto mecanico, optou-se por
fazer o robo a partir da adaptacao uma impressora 3D por dois principais motivos:
disponibilidade de APIs para o controle e como seria necessario a fabricacao de pecas
para o robo, a propria impressora poderia ser usada para prototipacao das pecas.
Assim, para acionamento das teclas bastaria utilizar um controle da impressora
por coordenadas cartesianas, mas trocando o extrusor de filamento por uma peca
adequada para pressionar as teclas. Decidiu-se usar uma caneta capacitiva para tal
tarefa, de modo que ela tambem pudesse ser usada futuramente para interacao com
telas touchscreen.
Uma vez que o controle da impressora ja estava disponıvel a partir de uma
biblioteca de codigo aberto, foi projetado primeiro o atuador para insercao e remocao
de cartao de credito no POS. A escolha foi utilizar um servo-motor controlado por um
Arduino, sendo necessario tambem utilizar um sistema mecanico para transformar
o movimento de rotacao do servo em movimento linear.
3

Para identificar a posicao das teclas de um POS de forma simples, as carac-
terısticas fısicas do dispositivos foram descritas em um arquivo texto que e usado
pelo software para que o robo aperte as teclas na posicao correta.
Todo o software para desenvolvimento dos atuadores foi feito utilizando uma
aplicacao com interface grafica. Depois de testes e validacao, por fim foi projetada
uma arquitetura de software para desacoplar a GUI (Graphical User Interface ou
interface grafica do usuario) do que viria ser a API de controle do robo.
Para completar o ambiente de testes e automatizar outras interacoes com
as interfaces graficas do terminal POS, e possıvel utilizacao de ferramentas que
se comunicam diretamente o software de terminais POS de desenvolvimento. O
projeto foi desenvolvido com conhecimento e permissao da Stone Pagamentos S.A
[5], utilizando terminais de desenvolvimento com um dos sistemas desenvolvidos pela
empresa.
1.6 Descricao
O capıtulo 2 apresenta as principais tecnologias e ferramentas utilizadas para
implementacao do projeto com breves exemplos de utilizacao.
O capıtulo 3 detalha o projeto de software para controle do robo e tambem des-
creve como foi feita a adaptacao da impressora 3D e projeto eletronico e fısico para
construcao do robo
O capitulo 4 mostra um caso de teste automatizado utilizando a API de comu-
nicacao com o robo.
O capıtulo 5 apresenta as conclusoes e pontos de melhoria para trabalhos futuros.
4
Capıtulo 2
Tecnologias e Ferramentas
Nesse capıtulo serao apresentadas as tecnologias e ferramentas utilizadas para
implementacao tecnica do projeto. Tambem sera apresentada ao final do capıtulo o
sistema a que se aplica o ambiente de testes.
2.1 C++ e Qt Framework
O C++[6] e uma linguagem de programacao criada por Bjarne Stroustrup
em 1983 no Bell Labs, desenvolvida inicialmente como uma extencao a lingua-
gem C; e uma linguagem multiparadigma, incluindo orientacao a objetos, pro-
gramacao generica e linguagem imperativa. Ainda hoje a linguagem esta em cons-
tante evolucao, sendo o padrao ISO/IEC 14882, conhecido como C++17 (ou C++1z)
a sua ultima revisao, lancada em dezembro de 2017[7].
O Qt, criado em 1993, e bastante conhecido como um framework para de-
senvolvimento de aplicacoes graficas multiplataforma com C++, mas ele oferece
tambem um grande conjunto de ferramentas para desenvolvimento de aplicacoes
console e bibliotecas. Ele e um toolkit (conjunto de ferramentas) com mais de 55
modulos e mais de 1650 classes, com foco em alto desempenho e produtividade [8].
O Qt pode ser encontrado em sistemas de bordo de carros, avioes, em aplicacoes
medicas, automacao industrial. Atualmente na versao 5.11.0, ele e mantido e li-
cenciado pela The Qt Company e sendo tambem um framework de codigo aberto,
recebe muitas contribuicoes de comunidades de software livre [9].
Uma das grandes contribuidoras do Qt, e atualmente a maior comunidade
5

de software livre do mundo, e a KDE, bastante conhecida pelo ambiente grafico
para Linux KDE Plasma [10]. A comunidade foi fundada em 1996 e produz varios
aplicacoes e bibliotecas utilizando o Qt como principal ferramenta.
O Qt oferece modulos para comunicacao via porta serial, bluetooth, NFC
ou rede para o controle de dispositivos perifericos ou equipamentos, oferecendo ao
desenvolvedor classes de simples utilizacao sem a necessidade de implementacao de
protocolos, o que facilitou o desenvolvimento da comunicacao com o robo.
2.2 Testes de Software
Na criacao de um software e pratica comum os desenvolvedores realizarem
testes para assegurar que o programa esta de acordo com os requisitos do sistema.
Entretanto, e pouco provavel que o desenvolvedor consiga cobrir todos possıveis ca-
sos durante o teste e e muito comum que no desenvolvimento de alguma funcionali-
dade, alguma outra funcionalidade ja desenvolvida seja impactada e o desenvolvedor
nao perceba a relacao.
Os processos de Quality Assurance (QA) [11] tem como objetivo explorar um
sistema em busca de erros a fim de minimizar os riscos deles serem encontrados pelo
usuario final e assim garantir uma melhor qualidade de software.
2.2.1 Modelo caixa-preta e testes funcionais
Um importante modelo de testes e o teste caixa-preta. Nesse modelo e levado
em conta somente os requisitos do software e nao se utiliza dos detalhes de sua
implementacao na realizacao de um caso de teste. O programa e tratado como
uma caixa-preta; sao realizados diversos casos de teste com varias possibilidades de
entradas e os dados de saıda sao comparados com o que se espera dos requisitos[12].
6

Figura 2.1: Representacao do modelo de testes caixa-preta.
Uma aplicacao do modelo caixa-preta sao os testes funcionais, usados para
se testar funcionalidades do software que esta sendo desenvolvido. Para realizacao
desse tipo de testes, existem varios softwares para automatizacao de tarefas; nesse
projeto foi utilizado o Selenium WebDriver [13] para aplicacoes Qt.
2.2.2 Selenium WebDriver
O Selenium e uma ferramenta que permite automatizacao de tarefas em na-
vegadores web. Foi criado inicialmente como proposta para automatizar testes em
sites, mas nao esta restrito a somente isso [13]. Com ele e possıvel simular a uti-
lizacao de uma pagina web por um usuario. No exemplo a seguir um exemplo escrito
em Python, o o Selenium e utilizado para automatizar uma busca no Google usando
o navegador Chromium e em seguida um printscreen de tele e capturado (ver Figura
2.2).
1 import time
2 from selenium import webdriver
3 from selenium.webdriver.common.keys import Keys
4
5 browser = webdriver.Chrome()
6 browser.get('http://www.google.com')
7
8 search = browser.find_element_by_name('q') # procura caixa de pesquisa
9 search.send_keys("busca no google usando selenium")
10 search.send_keys(Keys.RETURN) # pressiona tecla RETURN
11 browser.save_screenshot("google_result.png") # salva imagem do navegador
12 time.sleep(5) # espera 5 segundos para ver resultado
13 browser.quit()
7

Figura 2.2: Imagem capturada de pesquisa com Google usando Selenium.
No exemplo explicitado, o proprio script que automatiza a busca e o res-
ponsavel por iniciar o navegador na pagina desejada. Ja no caso do projeto, a
pagina web alvo esta sendo executada em uma aplicacao embarcada no POS. O Se-
lenium tambem permite a automatizacao de paginas remotas via arquitetura cliente-
servidor. Para tal, e necessario que a aplicacao alvo tenha um servidor do Selenium
para que o script cliente possa se comunicar pela rede. No projeto foi utilizada uma
implementacao de codigo aberto do Selenium WebDriver para aplicacoes Qt feita
pela Cisco® [14]. Assim, a aplicacao Qt embarcada inicia um servidor do Selenium
em uma determinada porta e dessa forma o script como cliente pode se comunicar
com a aplicacao remota acessando o endereco disponibilizado.
2.3 Arduino
O Arduino e uma plataforma de prototipagem eletronica criada por Massimo
Banzi, David Cuartielles, Tom Igoe, Gianluca Martino e David Mellis em 2005 [15].
A placa original foi projetada sobre um microcontrolador Atmel AVR® com suporte
a entradas digitais e analogicas, e tambem alguns componentes complementares
como entrada USB e conector para alimentacao por fonte de tensao.
8

O objetivo do projeto era fornecer uma plataforma de baixo custo, expansıvel
e acessıvel para novatos e profissionais. Hoje a plataforma e bastante difundida
e aplicada em diversas areas, sendo possıvel encontrar o Arduino sendo usado em
exposicoes interativas de arte ou ate em projetos comerciais.
Tanto o hardware quanto software (IDE) sao licenciados sob livre direito de copia,
assim podem ser encontradas no mercado e em comunidades de software livre di-
versas variacoes do Arduino e uma grande variedade de modulos que se conectam a
placa. A Figura 2.3 apresenta exemplos de placas oficiais.
Figura 2.3: Alguns modelos do Arduino.
Alem das placas bases, ha no mercado muitos modulos de sensores (ver Figura
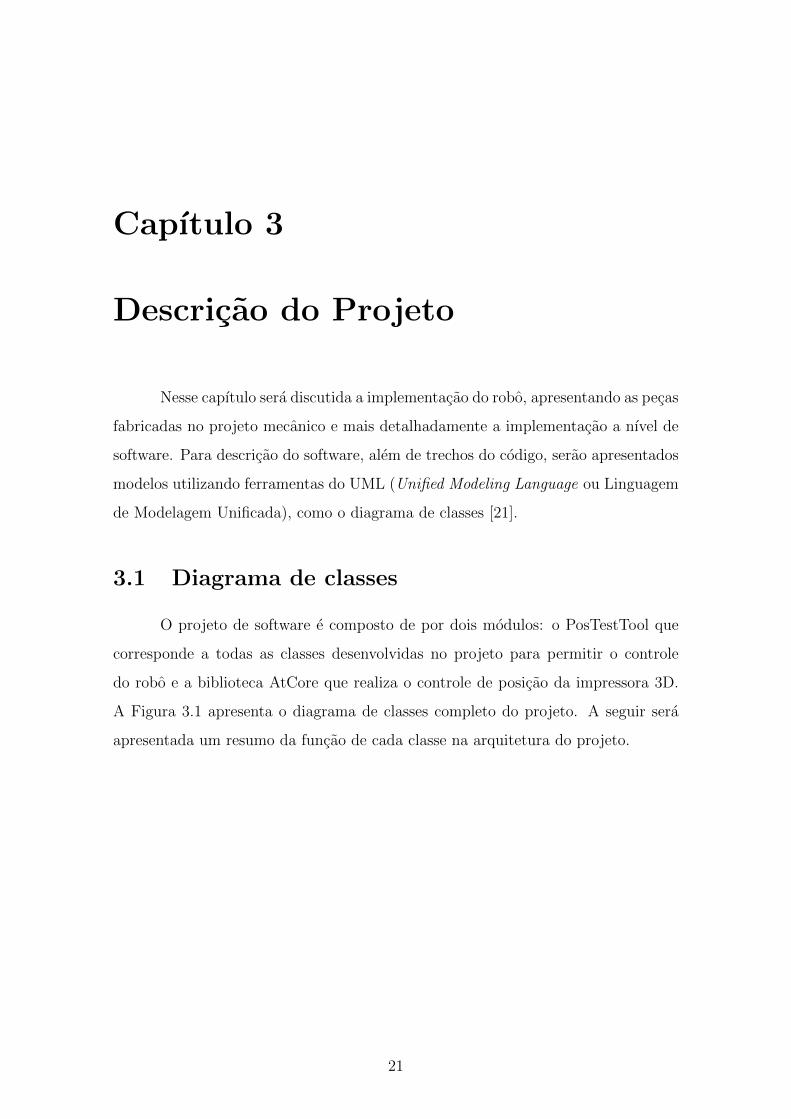
2.4) e placas de expansao, conhecidas como shields que tem intuito de adicionar mais
funcionalidade ao Arduino sem que o usuario leigo em eletronica tenha necessidade
de criar suas proprias placas. A Figura 2.5 apresenta um shield ethernet conectado
a um Arduino.
9
Figura 2.4: Exemplos de modulos de sensores.
Figura 2.5: Arduino Uno com shield ethernet.
A linguagem de programacao padrao do Arduino e o C++, que combina com a
biblioteca Wiring fornecendo funcoes e classes para facilitar o uso de entradas e
saıdas, comunicacao serial, etc. O trecho de codigo a seguir exemplifica a estrutura
basica do codigo principal de um programa em Arduino:
10

void setup()
{
// coloque instruc~oes para serem executadas na inicializac~ao
}
void loop()
{
// o codigo principal deve ficar aqui e ira executar repetidamente
}
As funcoes setup() e loop() devem ser obrigatoriamente implementadas. A
funcao setup() sera executada no boot do Arduino apenas uma vez, ja a funcao loop,
sera executada logo apos ao termino da execucao de setup() e ficara executando
repetidamente.
Para o projeto, o Arduino foi utilizado para fazer para o controle de um
servo-motor para insercao de cartao que sera melhor detalhada no capıtulo 3. O
modelo utilizado foi o Arduino Uno, ilustrado na figura 2.6 e detalhado na Tabela
2.3.
Figura 2.6: Arduino Uno.
11

Tabela 2.1: Caracterısticas do Arduino Uno [1].
Microcontrolador ATmega328P
Tensao de Entrada (recomendada) 7-12V
Tensao de entrada (limite) 6-20V
Pinos de entrada/saıda digital 14
Pinos de entrada/saıda digital com PWM 6
Pinos de entrada analogica 6
Corrente Contınua por pino 20 mA
Corrente Contınua por pino 3,3V 50 mA
Memoria Flash 32 KB
SRAM 2 KB
EEPROM 1 KB
Clock 16 MHz
2.4 Impressao 3D
Impressao 3D e uma tecnologia de prototipagem rapida que permite a fabricacao
de um modelo 3D desenhado por CAD (Computer Aided Design ou Desenho Assis-
tido por Computador) por meio da adicao de um material. A grande vantagem da
prototipagem rapida e permitir fabricar uma peca em poucos minutos ou horas e
assim testa-la para validar o modelo, o que acelera muito o desenvolvimento ate se
ter um modelo final[16].
12

Figura 2.7: Impressora 3D Anet® A6.
As impressoras 3D tem se tornado mais acessıveis financeiramente e tambem
mais compactas. Com isso estao sendo vastamente utilizadas nao so na industria,
mas tambem para uso domestico. As impressoras mais populares sao as que usam
tecnologia FDM (Fused Deposition Modeling), que consiste na fusao e deposicao de
um polımero. Esses polımeros sao comercializados em rolos na forma de filamentos
e existem em diversos materiais, onde os mais comuns sao o PLA (poliacido latico)
e o ABS (Acrilonitrila Butadieno Estireno). O material e aquecido por uma peca
chamada cabeca extrusora ou bico extrusor ate fundir e depositado em camadas
sobrepostas.
13

A Figura 2.7 apresenta o modelo que foi utilizado no projeto para impressao
das pecas e posteriormente foi adaptado como robo de testes. A Anet® A6 [2] e
uma impressora de baixo custo do tipo FDM com estrutura em acrılico. A Tabela
2.4 apresenta algumas especificacoes do modelo.
Tabela 2.2: Caracterısticas da impressora 3D Anet® A6 [2].
Volume de impressao 220x220x250mm
Velocidade de impressao 100mm/s
Precisao de espessura de camada 0,1-0,3mm
Acuracia em Posicao XY 0,012mm
Acuracia em Posicao Z 0,004mm
Material para impressao ABS, PLA, HIPS, etc
Tipo de arquivo G-code
Para impressao de um modelo 3D e necessario a utilizacao de uma ferramenta
denominada fatiadora ou slicer que tem como funcao converter um modelo 3D para
o formato que a impressora consegue interpretar para fabricacao de uma peca. O
G-code e uma linguagem de programacao para maquinarios que usam Comando
Numerico Computadorizado (CNC), no caso da impressao 3D ele basicamente e
composto por comandos para posicionamento geometrico da cabeca extrusora, velo-
cidade de extrusao, controle de temperatura do bico extrusor, temperatura da base,
etc. Como exemplo, o comando G-code a seguir tem como resultado mover o bico
extrusor para as coordenadas (X,Y,Z) = (10.1, 6.32, 2.34) mm.
G1 X10 . 1 Y6.32 Z2 .34
O controle da impressora necessario para as funcoes do robo e feito atraves do
envio de comandos G-code para impressora com auxılio de uma API, que e explicado
com mais detalhes na Sessao 3.2. Para modelagem das pecas impressas do robo foi
utilizado CAD Onshape [17], uma ferramenta de modelagem 3D online e o material
utilizado foi o PLA.
14

2.5 Point of Sales (POS)
Popularmente conhecido como ”maquininha de cartao”ou ”maquineta de
cartao”, o POS e um dispositivo embarcado para processamento de pagamentos
com cartao do tipo chip-and-PIN. Trata-se de um tipo de pagamento especificado
pelas normas EMV [18], que sao normas de pagamento criadas pela Europay®,
MasterCard® e Visa®, as tres empresas que criaram originalmente os padroes e
hoje os padroes sao mantidos pela EMVCo. Numa transacao chip-and-PIN, a au-
tenticacao e feita por meio de um identificador de 4 ou 6 dıgitos, o PIN (Personal
Identification Number) e e necessaria uma troca de mensagens entre o dispositivo
POS e o chip do cartao de credito. A norma ISO/IEC 7816-3 define o protocolo de
comunicacao entre chip e leitor de cartao, as mensagens sao trocadas por comandos
chamados de APDU (Application Protocol Data Units)[19].
O acesso a etapa de autenticacao do PIN e limitado de forma que para faze-lo
e necessario realizar uma chamada a uma funcao disponibilizada pela fabricante do
POS que executa a captura do PIN pela teclado do dispositivo e ja realiza o processo
de autenticacao com o chip do cartao. Assim nao e possıvel fazer interceptacao da
senha no fluxo de pagamento e por isso nao e possıvel inserir via software um PIN
para realizacao de testes em ambiente de producao.
Sao encontrados no mercado uma grande variedade de terminais POS. Para
o usuario, os terminais se diferenciam em portabilidade, duracao de bateria, tipos
de conectividade, tipo de tela. Para o desenvolvedor de aplicacoes para POS, cada
fabricante disponibiliza sua API (Application Programming Interface ou Interface
de Programacao de Aplicacoess) de desenvolvimento proprietaria. Alem disso, cada
modelo possui suas especifidades de sistema operacional e arquitetura de processa-
dor. Atualmente, as fabricantes de terminais POS lideres do mercado sao: Ingenico®
(Estadunidense), Verifone® (Francesa) e PAX® (Chinesa).
No Brasil, os dispositivos POS sao fornecidos pelas adquirentes, que sao as
instituicoes responsaveis por credenciar lojistas a transacionarem pagamentos de
credito e debito e tambem sao responsaveis por fazer o processamento das transacoes.
Para realizar uma transacao usando cartao de credito, alem da da leitura dos dados
do cartao pelo POS, e necessario autorizacao do emissor do cartao que verifica se o
15

portador do cartao possui saldo para transacionar e tambem e necessaria autorizacao
da bandeira do cartao, que e quem regula as regras de processamento de transacoes.
Quem realiza esse intermedio entre emissor, bandeira, portador do cartao e lojistas
sao as adquirentes. Segundo a ABECS (Associacao Brasileira das Empresas de
Cartoes de Credito e Servicos), o mercado de adquirencia transacionou so no primeiro
trimestre de 2018, 220 bilhoes de reais [20]. As quatro maiores adquirentes do
mercado atualmente sao: Cielo®, Rede®, Getnet® e Stone Pagamentos®.
Cada adquirente fornece dispositivos POS com suas proprias aplicacoes pro-
prietarias. O modelo utilizado para esse projeto foi o S920 da fabricante PAX®
com a aplicacao desenvolvida pela Stone Pagamentos®. A Tabela 2.3 apresenta as
caracterısticas do terminal e a Figura 2.8 apresenta uma ilustracao do modelo em
questao.
Figura 2.8: POS modelo PAX® S920 distribuıdo pela Stone
Pagamentos® S.A.
16

Tabela 2.3: PAX® S920 distribuıdo pela Stone Pagamentos® S.A.
Processador ARM11 32-bit 400MHz
Memoria Flash 256MB
Memoria RAM 128MB
Display 3,5 polegadas, 240x320 pixels TFT LCD
Conectividade 2G, 3G, Wi-Fi e Bluetooth
Sistema Operacional Linux
2.6 Aplicacao de Pagamento
O MAMBA, acronimo para Manufacturer Agnostic Multi-platform Base Ap-
plication, e a aplicacao base desenvolvida pela Stone Pagamentos® S.A. para seus
terminais POS lancados desde marco de 2018. A proposta de desenvolvimento era
fazer uma aplicacao que pudesse ser independente da API dos fabricantes de POS,
a fim de se ter uma aplicacao unica para diferentes terminais. Assim, melhorando
a manutenibilidade e escalabilidade da plataforma. Antes do MAMBA, cada ter-
minal possuıa seu proprio software, o que trazia o inconveniente de ter que se dar
manutencao a diferentes sistemas com o mesmo proposito.
17

Figura 2.9: Modelo S920 com o MAMBA em execucao.
Um diferencial da plataforma e que as suas diversas funcoes sao divididas em
aplicativos, possuindo um aplicativo para pagamento, outro aplicativo para confi-
guracoes, aplicativo para geracao de relatorio de transacoes. A plataforma foi desen-
volvida usando C++ com o framework Qt e alem disso, as interfaces dos aplicativos
(frontend) sao todos feitos utilizando as tecnologias web: HTML, CSS e JavaScript
(ver Figura 2.10). Dessa forma, na proposta de automatizacao de testes funcionais,
e possıvel utilizar a ferramenta Selenium WebDriver, apresentada na sessao 2.3.
18

Figura 2.10: web inspector do navegador Chromium na aplicacao de paga-
mento do MAMBA.
(a) Pagina de selecao
do metodo de paga-
mento.
(b) Pagina de entrada
da senha do cartao.
(c) Pagina de paga-
mento aprovado.
Figura 2.11: exemplos de paginas da aplicacao de pagamento.
A Figura 2.11 mostra algumas capturas de tela da aplicacao de pagamento
e a Figura 2.12 apresenta o diagrama de sequencia com um dos fluxos possıveis
de pagamento com sucesso. Inicialmente o usuario insere o cartao no POS para
iniciar fluxo de pagamento. Nesse fluxo, ele escolhe a forma de pagamento (credito,
debito), insere o valor desejado para pagamento, o numero de parcelas caso seja
escolhido credito e entao o PIN do cartao e solicitado. Caso a senha esteja correta,
a transacao e enviada para adquirente que ira fazer o processamento da transacao e
retornar o resultado. Por fim, o recibo da transacao e impresso no caso de sucesso
19

(caso contrario uma tela de erro e exibida) e a aplicacao solicita que o usuario retire
o cartao para se encerrar.
Figura 2.12: Diagrama de sequencia da aplicacao de pagamento.
20
Capıtulo 3
Descricao do Projeto
Nesse capıtulo sera discutida a implementacao do robo, apresentando as pecas
fabricadas no projeto mecanico e mais detalhadamente a implementacao a nıvel de
software. Para descricao do software, alem de trechos do codigo, serao apresentados
modelos utilizando ferramentas do UML (Unified Modeling Language ou Linguagem
de Modelagem Unificada), como o diagrama de classes [21].
3.1 Diagrama de classes
O projeto de software e composto de por dois modulos: o PosTestTool que
corresponde a todas as classes desenvolvidas no projeto para permitir o controle
do robo e a biblioteca AtCore que realiza o controle de posicao da impressora 3D.
A Figura 3.1 apresenta o diagrama de classes completo do projeto. A seguir sera
apresentada um resumo da funcao de cada classe na arquitetura do projeto.
21
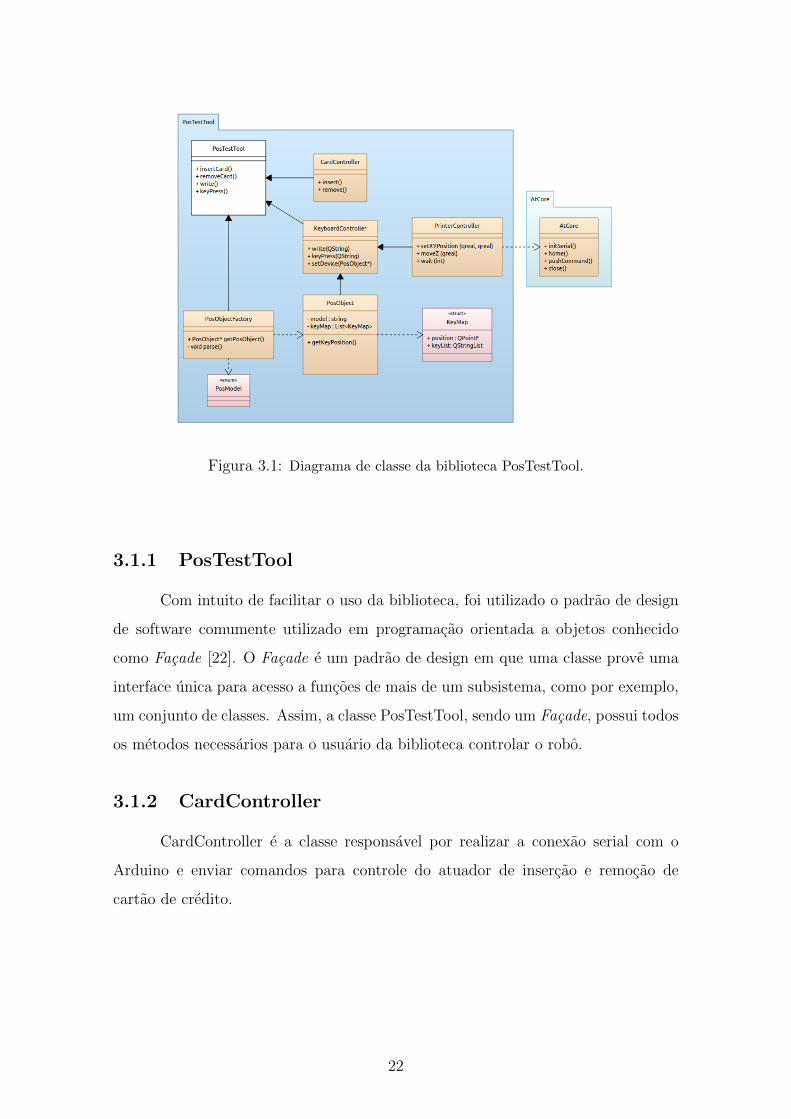
Figura 3.1: Diagrama de classe da biblioteca PosTestTool.
3.1.1 PosTestTool
Com intuito de facilitar o uso da biblioteca, foi utilizado o padrao de design
de software comumente utilizado em programacao orientada a objetos conhecido
como Facade [22]. O Facade e um padrao de design em que uma classe prove uma
interface unica para acesso a funcoes de mais de um subsistema, como por exemplo,
um conjunto de classes. Assim, a classe PosTestTool, sendo um Facade, possui todos
os metodos necessarios para o usuario da biblioteca controlar o robo.
3.1.2 CardController
CardController e a classe responsavel por realizar a conexao serial com o
Arduino e enviar comandos para controle do atuador de insercao e remocao de
cartao de credito.
22
3.1.3 KeyboardController
A classe KeyboardController e a responsavel por receber as entradas de teclas
desejadas e enviar para a classe PrinterController as coordenadas para acionamento
das teclas para se ter a entrada desejada, podendo ser o acionamento de uma tecla
especıfica ou a insercao de um texto.
3.1.4 PrinterController
E a classe que recebe as coordenadas desejadas para posicao cartesiana da
cabeca extrusora da impressora 3D e realiza o controle por meio da biblioteca At-
Core.
3.1.5 PosObject e KeyMap
A classe PosObject descreve o modelo do POS com as caracterısticas ne-
cessarias para o controle do robo, como a lista de KeyMap que e uma struct formada
pela posicao cartesiana da tecla e a lista de caracteres contidos nela.
3.1.6 PosObjectFactory e PosModel
A classe PosObjectFactory utiliza o padrao de design de software conhecido
como Factory, uma padrao criacional que tem como objetivo a criacao de um objeto
de forma que o usuario da classe nao precise conhecer os detalhes de implementacao
para criacao do objeto. Essa classe tem como objetivo retornar um objeto da classe
PosObject a partir da selecao do modelo de POS desejado, representado pelo tipo
enumerado PosModel.
3.1.7 AtCore
A classe AtCore pertence a uma biblioteca externa AtCore, criada por um
grupo de desenvolvedores da KDE com objetivo de realizar o controle de impressoras
3D. A utilizacao da classe PrinterController como intermediaria entre a Keyboard-
Controller e a AtCore permite que seja mais facil a substituicao da biblioteca AtCore
se necessario, uma vez que se trata de um componente externo.
23
3.2 Controle da impressora 3D
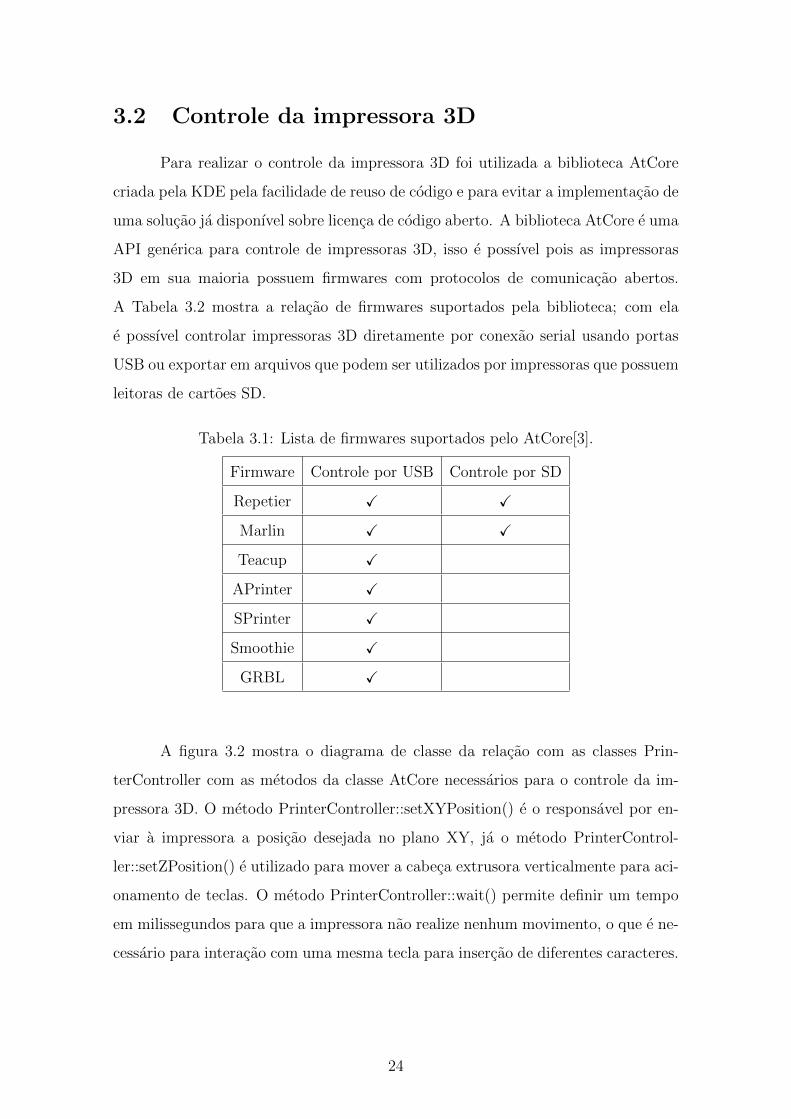
Para realizar o controle da impressora 3D foi utilizada a biblioteca AtCore
criada pela KDE pela facilidade de reuso de codigo e para evitar a implementacao de
uma solucao ja disponıvel sobre licenca de codigo aberto. A biblioteca AtCore e uma
API generica para controle de impressoras 3D, isso e possıvel pois as impressoras
3D em sua maioria possuem firmwares com protocolos de comunicacao abertos.
A Tabela 3.2 mostra a relacao de firmwares suportados pela biblioteca; com ela
e possıvel controlar impressoras 3D diretamente por conexao serial usando portas
USB ou exportar em arquivos que podem ser utilizados por impressoras que possuem
leitoras de cartoes SD.
Tabela 3.1: Lista de firmwares suportados pelo AtCore[3].
Firmware Controle por USB Controle por SD
Repetier X X
Marlin X X
Teacup X
APrinter X
SPrinter X
Smoothie X
GRBL X
A figura 3.2 mostra o diagrama de classe da relacao com as classes Prin-
terController com as metodos da classe AtCore necessarios para o controle da im-
pressora 3D. O metodo PrinterController::setXYPosition() e o responsavel por en-
viar a impressora a posicao desejada no plano XY, ja o metodo PrinterControl-
ler::setZPosition() e utilizado para mover a cabeca extrusora verticalmente para aci-
onamento de teclas. O metodo PrinterController::wait() permite definir um tempo
em milissegundos para que a impressora nao realize nenhum movimento, o que e ne-
cessario para interacao com uma mesma tecla para insercao de diferentes caracteres.
24

Figura 3.2: Diagrama de classes simplificado do controle da
impressora 3D.
O trecho de codigo a seguir mostra como e feita a conexao com a impressora
3D. No construtor da classe PrinterController e feito uma busca em todos os dispo-
sitıvos serial conectados ao computador pela string de identificacao do fabricante do
dispositivo, ”1a86”no caso da impressora Anet® A6. O identificador da porta serial
correspondente e entao passado como parametro ao metodo AtCore::initSerial() e
caso haja falha na conexao, o metodo dispara uma excecao uma vez que a conexao
com a impressora e estritamente necessaria para o controle do robo. Caso contrario,
o metodo AtCore::home() e chamado, ele e responsavel por realizar a calibracao da
origem do sistema de coordenadas cartesianas, em seguida e definida uma posicao
segura no eixo Z que garante que o atuador do teclado se mova livremente no plano
XY sem entrar em contato com o dispositivo POS.
25
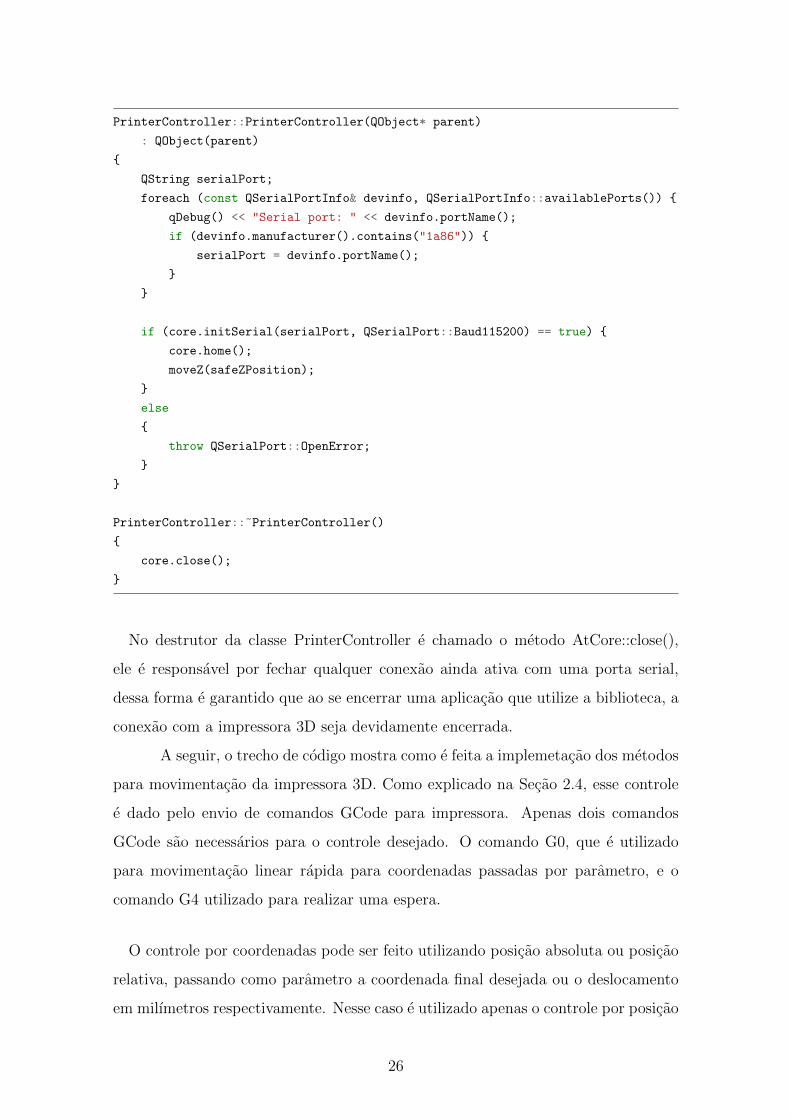
PrinterController::PrinterController(QObject* parent)
: QObject(parent)
{
QString serialPort;
foreach (const QSerialPortInfo& devinfo, QSerialPortInfo::availablePorts()) {
qDebug() << "Serial port: " << devinfo.portName();
if (devinfo.manufacturer().contains("1a86")) {
serialPort = devinfo.portName();
}
}
if (core.initSerial(serialPort, QSerialPort::Baud115200) == true) {
core.home();
moveZ(safeZPosition);
}
else
{
throw QSerialPort::OpenError;
}
}
PrinterController::~PrinterController()
{
core.close();
}
No destrutor da classe PrinterController e chamado o metodo AtCore::close(),
ele e responsavel por fechar qualquer conexao ainda ativa com uma porta serial,
dessa forma e garantido que ao se encerrar uma aplicacao que utilize a biblioteca, a
conexao com a impressora 3D seja devidamente encerrada.
A seguir, o trecho de codigo mostra como e feita a implemetacao dos metodos
para movimentacao da impressora 3D. Como explicado na Secao 2.4, esse controle
e dado pelo envio de comandos GCode para impressora. Apenas dois comandos
GCode sao necessarios para o controle desejado. O comando G0, que e utilizado
para movimentacao linear rapida para coordenadas passadas por parametro, e o
comando G4 utilizado para realizar uma espera.
O controle por coordenadas pode ser feito utilizando posicao absoluta ou posicao
relativa, passando como parametro a coordenada final desejada ou o deslocamento
em milımetros respectivamente. Nesse caso e utilizado apenas o controle por posicao
26

absoluta, devendo-se executar uma chamada ao metodo AtCore::setAbsolutePosition()
antes de enviar o comando GCode pelo metodo AtCore::pushCommand().
void PrinterController::setXYPosition(QPointF point)
{
core.setAbsolutePosition();
core.pushCommand(
GCode::toCommand(GCode::G0, QStringLiteral("X%1 Y%2")
.arg(QString::number(point.x()), QString::number(point.y()))));
}
void PrinterController::setZPosition(qreal z)
{
core.setAbsolutePosition();
core.pushCommand(
GCode::toCommand(GCode::G0, QStringLiteral("Z%1")
.arg(QString::number(z))));
}
void PrinterController::wait(int millisseconds)
{
core.pushCommand(
QStringLiteral("G4 P%1")
.arg(QString::number(millisseconds)));
}
Com esses metodos explicitados ja e possıvel realizar o controle de entradas
pelo teclado do dispositivo POS.
27

3.3 Controle do teclado
Para realizar a interacao com o teclado fısico do dispositivo POS, e utili-
zado um controle por coordenadas cartesianas. Como explicitado na Secao 3.2, a
classe PrinterController apresenta apenas duas funcoes pra controle da impressora
3D, uma para movimentacao da cabeca extrusora no plano XY e outra para mo-
vimentacao no eixo Z. Tendo apenas esses dois tipos de movimentacao disponıveis,
o controle e feito da seguinte forma: utiliza-se a movimentacao no plano XY para
alinhamento do atuador com a tecla desejada e a movimentacao do eixo Z para
realizar o pressionamento da tecla.
Pelo design fısico do dispositivo POS, o plano das teclas possui uma inclinacao
com relacao ao plano da base de apoio como e possıvel observar na Figura 3.3. Dessa
forma, para nao precisar realizar um deslocamento no eixo Z diferente para cada
tecla e para garantir que a caneta as pressione ortogonalmente, uma base de apoio e
colocada para posicionar o plano das teclas paralelo ao plano da base da impressora
3D e consequentemente paralelo ao plano XY de movimentacao da cabeca extrusora
da impressora.
Figura 3.3: Vista lateral do terminal PAX® S920 mostrando inclinacao do plano do
teclado.
Na figura 3.4 e possıvel observar o modelo 3D da peca projetada e o resultado
obtido com o posicionamento do POS sobre a base, nota-se que agora o plano das
teclas do dispositivo ficou paralelo ao plano da base.
28

Figura 3.4: Modelo da base de apoio do POS.
(a) POS sobre base, modelo 3D (b) POS sobre base, vista lateral, modelo 3D.
(c) POS sobre base, projeto real.
Figura 3.5: POS PAX® S920 posicionado sobre a base de apoio.
29
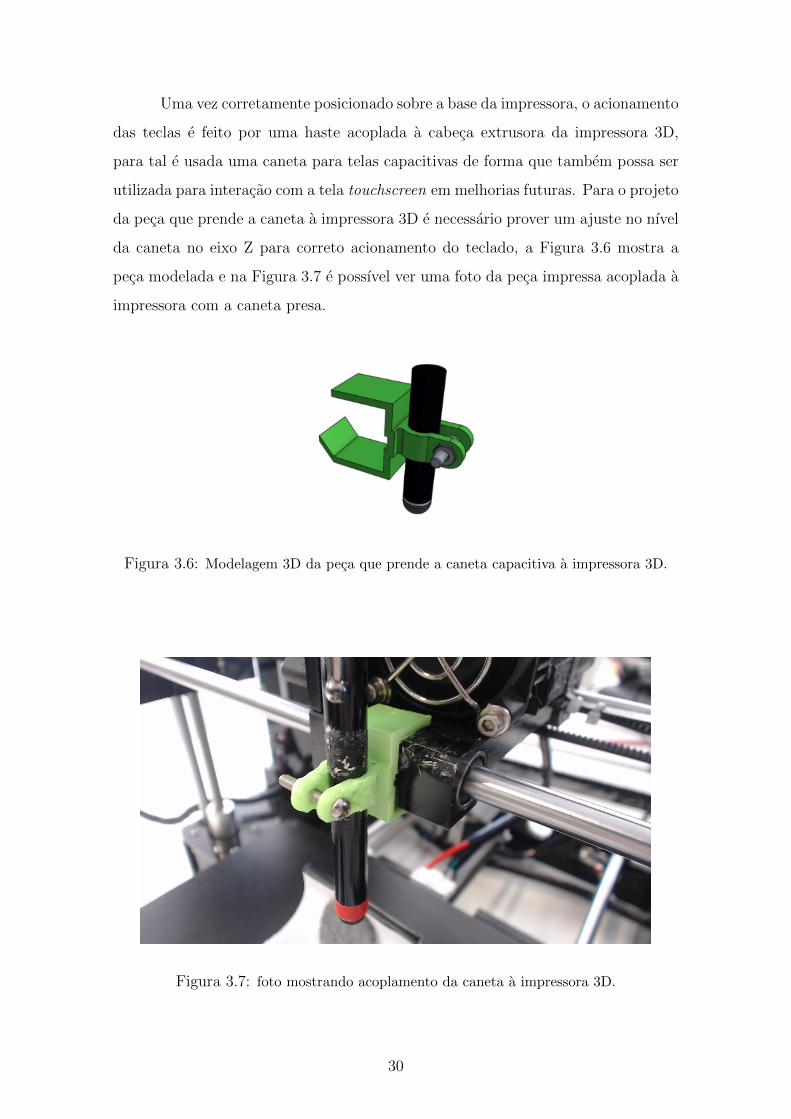
Uma vez corretamente posicionado sobre a base da impressora, o acionamento
das teclas e feito por uma haste acoplada a cabeca extrusora da impressora 3D,
para tal e usada uma caneta para telas capacitivas de forma que tambem possa ser
utilizada para interacao com a tela touchscreen em melhorias futuras. Para o projeto
da peca que prende a caneta a impressora 3D e necessario prover um ajuste no nıvel
da caneta no eixo Z para correto acionamento do teclado, a Figura 3.6 mostra a
peca modelada e na Figura 3.7 e possıvel ver uma foto da peca impressa acoplada a
impressora com a caneta presa.
Figura 3.6: Modelagem 3D da peca que prende a caneta capacitiva a impressora 3D.
Figura 3.7: foto mostrando acoplamento da caneta a impressora 3D.
30

Outra adaptacao fısica necessaria e o ajuste do fim de curso da impressora; a
calibracao do sistema de coordenadas da impressora e feita por meio de tres botoes
de fim de curso, um para cada eixo cartesiano. Uma vez a origem de um eixo
e calibrada, a impressora nao pode se deslocar para posicoes negativas no eixo.
Como o fim de curso do eixo Z e originalmente posicionado de forma que a ponta
da cabeca extrusora fique a uma distancia bem proxima a base da impressora, e
necessario uma adaptacao no fim de curso pois o dispositivo POS colocado sobre a
base da impressora ocupa uma altura consideravel, e assim o curso do eixo Z deve
ser alterado para nao haver colisao entre o dispositivo e a impressora. A Figura 3.8
apresenta uma visao frontal do aparato sobre a impressora com a cabeca extrusora
na posicao de origem desejada, assim e possıvel notar que a cabeca extrusora nao
deve se deslocar muito para baixo, somente o suficiente para acionamento das teclas.
Figura 3.8: Visao frontal do aparato.
Dessa forma, uma peca projetada e acoplada na impressora para que o botao
31
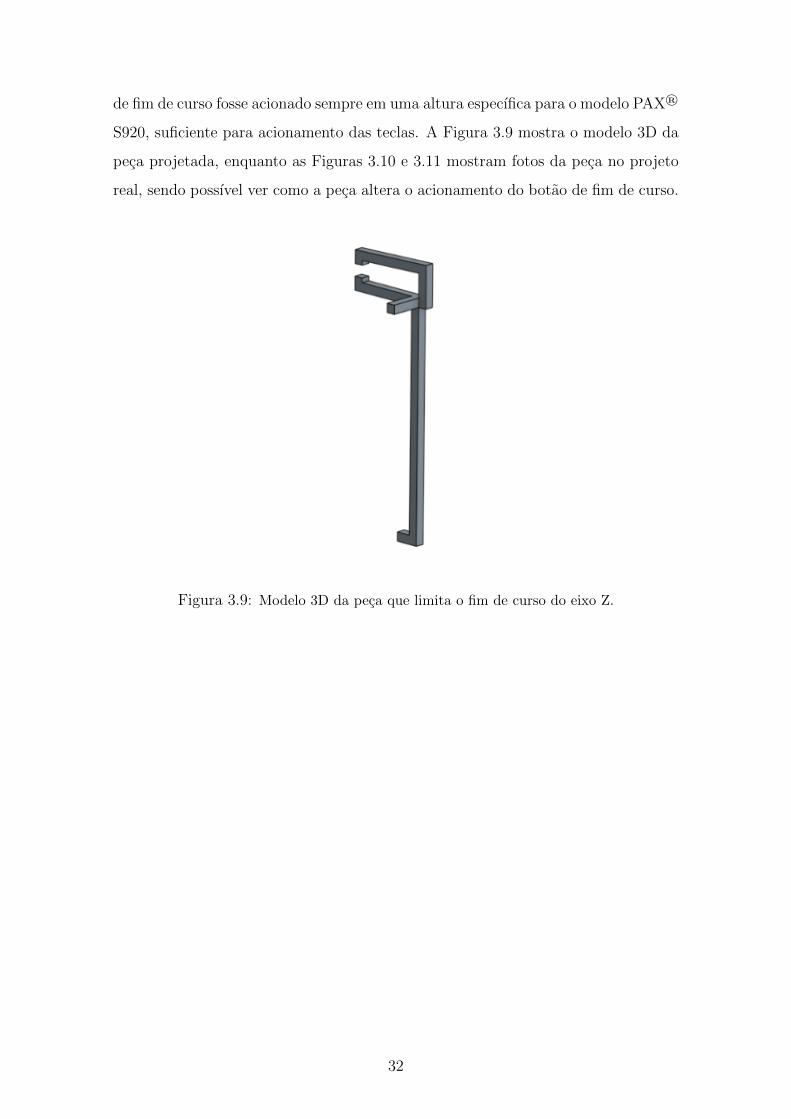
de fim de curso fosse acionado sempre em uma altura especıfica para o modelo PAX®
S920, suficiente para acionamento das teclas. A Figura 3.9 mostra o modelo 3D da
peca projetada, enquanto as Figuras 3.10 e 3.11 mostram fotos da peca no projeto
real, sendo possıvel ver como a peca altera o acionamento do botao de fim de curso.
Figura 3.9: Modelo 3D da peca que limita o fim de curso do eixo Z.
32

Figura 3.10: Peca que limita o fim de curso do eixo Z em foto do projeto real.
Figura 3.11: Foto do projeto real proximo ao botao de fim de curso do eixo Z.
Sob a otica do software implementado para interacao com o teclado, a Figura
33
3.12 apresenta um diagrama de classes simplificado do projeto mostrando apenas as
classes envolvidas no controle do teclado.
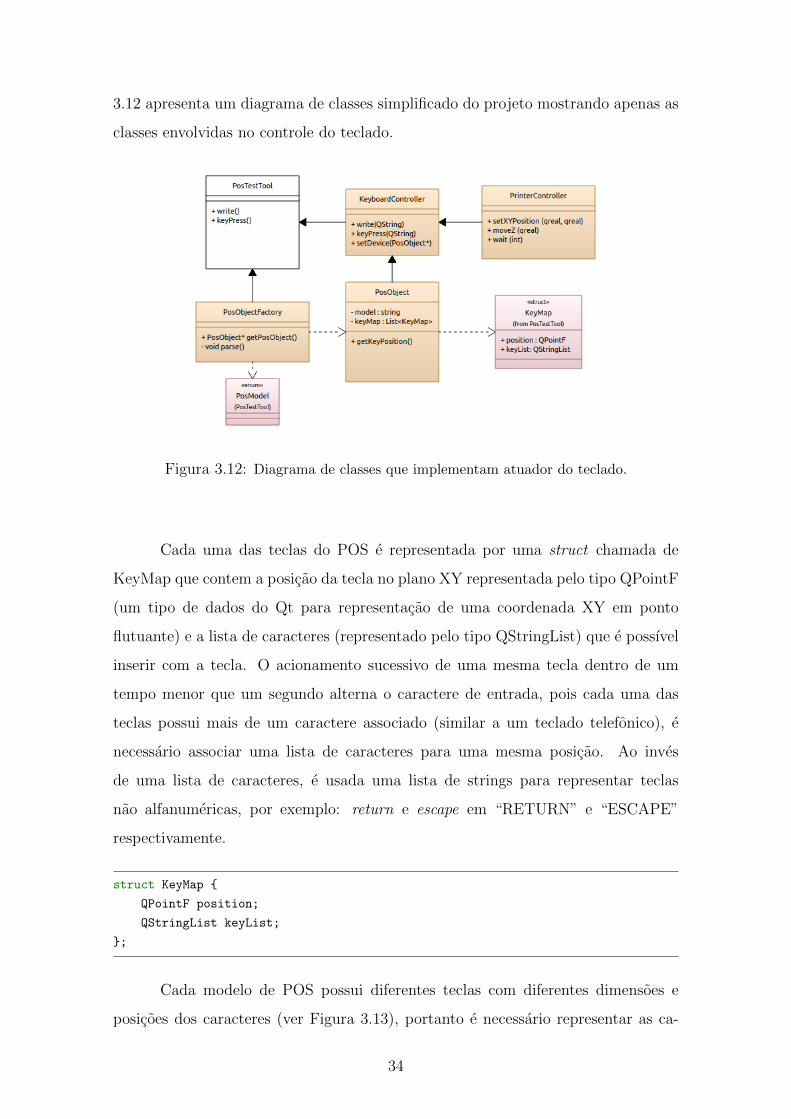
Figura 3.12: Diagrama de classes que implementam atuador do teclado.
Cada uma das teclas do POS e representada por uma struct chamada de
KeyMap que contem a posicao da tecla no plano XY representada pelo tipo QPointF
(um tipo de dados do Qt para representacao de uma coordenada XY em ponto
flutuante) e a lista de caracteres (representado pelo tipo QStringList) que e possıvel
inserir com a tecla. O acionamento sucessivo de uma mesma tecla dentro de um
tempo menor que um segundo alterna o caractere de entrada, pois cada uma das
teclas possui mais de um caractere associado (similar a um teclado telefonico), e
necessario associar uma lista de caracteres para uma mesma posicao. Ao inves
de uma lista de caracteres, e usada uma lista de strings para representar teclas
nao alfanumericas, por exemplo: return e escape em “RETURN” e “ESCAPE”
respectivamente.
struct KeyMap {
QPointF position;
QStringList keyList;
};
Cada modelo de POS possui diferentes teclas com diferentes dimensoes e
posicoes dos caracteres (ver Figura 3.13), portanto e necessario representar as ca-
34

racterısticas do dispositivo em um modelo de dados. Assim, a classe PosObject e
usada para armazenar as caracterısticas do dispositivo POS, tal como dimensoes,
nome do modelo e uma lista de KeyMap.
(a) Teclado do terminal PAX® S920. (b) Teclado do terminal PAX® D210.
Figura 3.13: Exemplo de diferencas no layout do teclado.
Para armazenar as caracterısticas de um dispositivo, e utilizado um arquivo
JSON (JavaScript Object Notation ou Notacao de Objetos JavaScript), um formato
para representacao de objetos. O trecho a seguir e mostra parte estrutura do arquivo
JSON usado para representar o as caracterıscas do POS modelo PAX® S920.
{
"vendor": "PAX",
"model": "S920",
"width": 77,
"height": 165,
"keyboardMap": [
{
"x": 15,
"y": 36,
"keyList": ["1", "q", "z", "."]
},
{
"x": 30,
"y": 36,
"keyList": ["2", "a", "b", "c"]
},
"..."
]
}
Os valores das coordenadas x e y de uma tecla estao representando a posicao
35
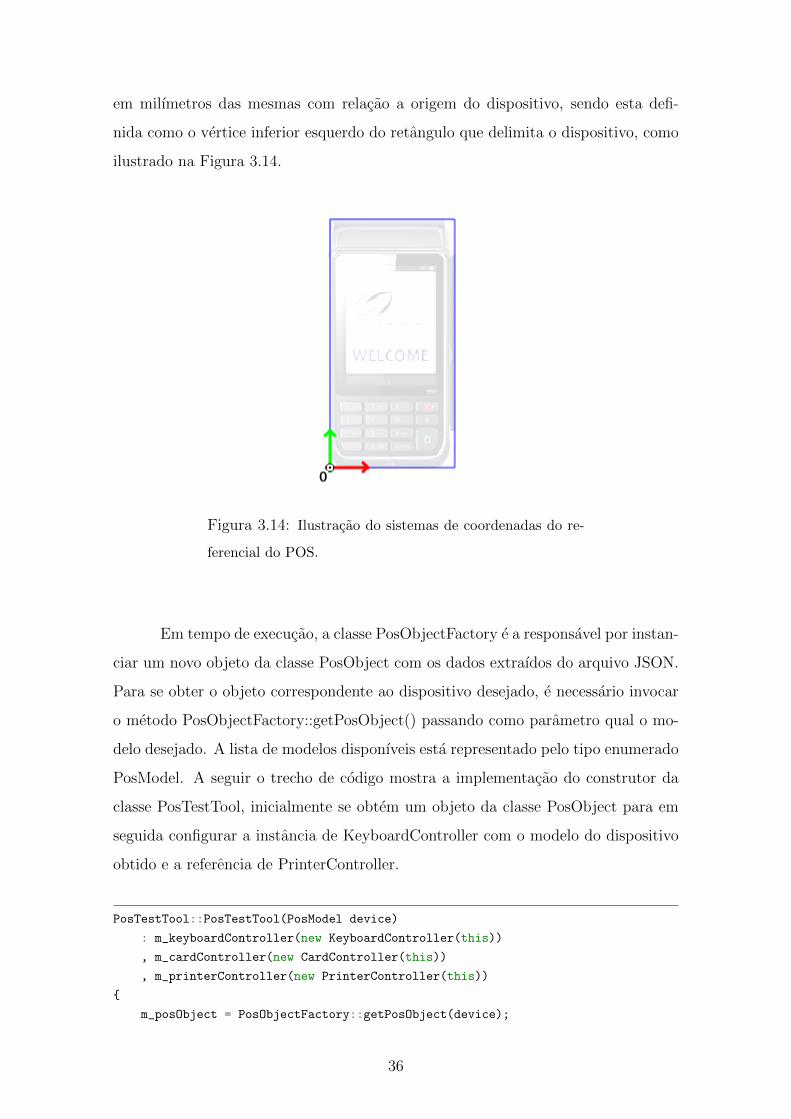
em milımetros das mesmas com relacao a origem do dispositivo, sendo esta defi-
nida como o vertice inferior esquerdo do retangulo que delimita o dispositivo, como
ilustrado na Figura 3.14.
Figura 3.14: Ilustracao do sistemas de coordenadas do re-
ferencial do POS.
Em tempo de execucao, a classe PosObjectFactory e a responsavel por instan-
ciar um novo objeto da classe PosObject com os dados extraıdos do arquivo JSON.
Para se obter o objeto correspondente ao dispositivo desejado, e necessario invocar
o metodo PosObjectFactory::getPosObject() passando como parametro qual o mo-
delo desejado. A lista de modelos disponıveis esta representado pelo tipo enumerado
PosModel. A seguir o trecho de codigo mostra a implementacao do construtor da
classe PosTestTool, inicialmente se obtem um objeto da classe PosObject para em
seguida configurar a instancia de KeyboardController com o modelo do dispositivo
obtido e a referencia de PrinterController.
PosTestTool::PosTestTool(PosModel device)
: m_keyboardController(new KeyboardController(this))
, m_cardController(new CardController(this))
, m_printerController(new PrinterController(this))
{
m_posObject = PosObjectFactory::getPosObject(device);
36

m_keyboardController->setDevice(m_posObject);
m_keyboardController->setPrinterController(m_printerController);
}
Tendo o dispositivo configurado e o ponteiro para o controlador da impres-
sora, ja e possıvel utilizar m keyboardController para atuar sobre o teclado. A classe
KeyboardController possui somente dois metodos para tal, o metodo Keyboard-
Controller::write() que tem como funcao a entrada de uma sequencia de caracteres,
podendo ser por exemplo a insercao de uma senha de 4 dıgitos; e o metodo Keybo-
ardController::keyPress() para insersao de um unico caractere. Os metodos PosTest-
Tool::write() e PosTestTool::keyPress() sao apenas chamadas para esses metodos de
KeyboardController. O trecho de codigo seguir apresenta um exemplo simples de
programa em C++ com Qt utilizando a biblioteca PosTestTool para escrever “tcc”
com o teclado do POS.
1 #include "postesttool.h"
2 #include <QCoreApplication>
3 int main(int argc, char* argv[])
4 {
5 QCoreApplication a(argc, argv);
6 PosTestTool ptt(PosModel::PAX_S920);
7 ptt.write("tcc");
8 return a.exec();
9 }
Para entender como o metodo KeyboardController::write() funciona, veja
o trecho de codigo a seguir. O metodo consiste em iterar sobre os caracteres
de uma string recebida como parametro e executar o metodo KeyboardControl-
ler::keyPress() passando a tecla correspondente ao caractere pelo numero de vezes
necessario para se ter o caractere desejado. Repare que, no caso de caracteres con-
secutivos localizados na mesma tecla, e necessario realizar uma espera para o POS
reconhecer como caracteres de entrada diferentes.
void KeyboardController::write(QString phrase)
{
// Verifica se foi escolhido um dispositivo POS e se impressora foi configurada.
// Caso contrario, aborta execuc~ao.
if (m_device == nullptr || m_printerController == nullptr) {
37

qCritical() << "Device or printer not set up";
return;
}
// Move impressora para uma altura fora de contato com o POS
m_printerController->moveZ(PrinterController::safeZPosition);
QPair<QPointF, int> lastCharPosition;
// Itera sobre string 'phrase'
foreach (QChar character, phrase) {
// Obtem a posic~ao do caractere
QPair<QPointF, int> charPosition = m_device->getKeyPosition(character);
// Espera se caractere esta na mesma tecla que caractere anterior
if (charPosition.first == lastCharPosition.first)
m_printerController->wait(500);
// Pressiona tecla para se obter o caractere
keyPress(character);
lastCharPosition = charPosition;
}
// Retorna impressora para posic~ao fora de contato com o POS
m_printerController->moveZ(PrinterController::safeZPosition);
}
void KeyboardController::keyPress(QString key)
{
if (m_device == nullptr || m_printerController == nullptr) {
qCritical() << "Device or printer not set up";
return;
}
// Obtem a posic~ao da tecla correspondente ao caractere.
QPair<QPointF, int> charPosition;
charPosition = m_device->getKeyPosition(key);
// Verifica se caractere foi encontrado.
// Caso contrario, aborta execuc~ao do metodo.
if (charPosition.first == QPointF(0, 0)) {
qError() << "charactere not found";
return;
}
// Move impressora para posic~ao correspondente a tecla.
m_printerController->moveZ(PrinterController::safeZPosition);
m_printerController->setXYPosition(charPosition.first);
// Pressiona tecla pelo numero de vezes necessario
38

// para se ter o caractere desejado.
for (int i = 0; i <= charPosition.second; ++i) {
m_printerController->moveZ(0);
m_printerController->moveZ(PrinterController::safeZPosition / 2);
}
m_printerController->moveZ(PrinterController::safeZPosition);
}
3.4 Insercao e remocao de cartao
Para insercao e remocao de cartoes de credito no POS, foi projetado um atuador
linear pelo acoplamento de uma engrenagem circular presa a um servo-motor com
uma cremalheira de dentes retos, dessa forma o deslocamento linear da cremalheira
e diretamente proporcional ao angulo de controle do servo-motor, ver Figura 3.15.
Portanto para realizar insercao e remocao de cartao basta definir um angulo ne-
cessario para deslocar o cartao de forma que o sensor do dispositivo POS detecte ou
nao a presenca do cartao.
Figura 3.15: Visao lateral do modelo 3d do atuador linear.
A Figura 3.16 mostra a peca ja impressa montada no robo. E importante
notar que foi necessario fixar a peca sobre outra com objetico de nivelar o atuador
para que um cartao de credito, quando fixado ao aparato, ficasse no mesmo nıvel
da entrada de cartao do dispositivo POS. A peca mostrada na Figura 3.17 e usada
para fixacao de cartoes de credito; o rebaixo retangular ao lado esquerdo da peca na
39

figura foi feito para colagem da peca a cremalheira; no lado direito existem dois furos
para parafusos usados para que a peca possa comprimir os cartoes e estes ficarem
bem fixos.
Figura 3.16: Atuador linear impresso em PLA.
Figura 3.17: Modelo 3D da peca que prende cartoes de
credito.
40

Figura 3.18: aparato completo.
Figura 3.19: cartao fixado ao atuador.
41

O motor utilizado no projeto foi o Hitec HS-311, que possui um angulo de
rotacao de 180º. O diagrama da Figura 3.20 apresenta o a conexao do servo-motor
com o Arduino. O servo-motor possui tres terminais, dois para alimentacao (conec-
tados aos pinos +5V e GND) e um para controle, conectado ao pino digital 9 do
Arduino.
Figura 3.20: Esquema da ligacao eletronica do servo com o Arduino.
42

Figura 3.21: vista lateral, arduino fixado ao aparato.
Para controlar o servo-motor, foi utilizada a biblioteca <Servo.h> que ja vem
instalada por padrao com o Arduino. A biblioteca expoe a classe Servo com alguns
metodos para facilitar o controle; a seguir um exemplo de utilizacao retirado dos
exemplos disponıveis com a IDE do Arduino, o exemplo em questao mostra como
controlar a posicao de um servo-motor a partir de uma entrada analogica controlada
por um potenciometro.
1 /*
2 Controlling a servo position using a potentiometer (variable resistor)
3 by Michal Rinott <http://people.interaction-ivrea.it/m.rinott>
4
5 modified on 8 Nov 2013
6 by Scott Fitzgerald
7 http://www.arduino.cc/en/Tutorial/Knob
8 */
9
10 #include <Servo.h>
11
12 Servo myservo; // cria objeto para controlar servo
13
14 int potpin = 0; // pino analogico para conectar potenciometro
15 int val; // variavel para guardar valor de leitura anal[ogica do potenciometro
43

16
17 void setup() {
18 myservo.attach(9); // configura o pino do servo para 9
19 }
20
21 void loop() {
22 val = analogRead(potpin); // le o valor do potenciometro (entre 0 e 1023)
23 val = map(val, 0, 1023, 0, 180); // escala o valor da leitura (entre 0 e 255)
24 myservo.write(val); // define posic~ao do servo com o valor escalado
25 delay(15); // espera o servo chegar na posic~ao
26 }
Tendo o controle do servo definido, falta somente a implementacao a comu-
nicacao do Arduino com o programa rodando no computador, que foi feita utilizando
a entrada USB. Todo arduino possui pelo menos uma porta serial disponıvel para
comunicacao via protocolo UART (Universal Asynchronous Receiver/Transmiter).
Esse tipo de comunicacao e Full-duplex, que permite transmitir e receber dados ao
mesmo tempo. Essa comunicacao pode feita pelos pinos RX (pino digital 0) e TX
(pino digital 1) ou via USB. Uma vez que a comunicacao serial e utilizada, nao e
possıvel utilizar esses pinos como entrada e saıda digitais.
Figura 3.22: Pinos de comunicacao serial do Arduino.
Para tratar mensagens recebidas pela porta serial, a biblioteca do Arduino
possui a funcao serialEvent() que e chamada toda vez que chega algum dado pelo
pino de leitura RX e pode ser reimplementada para tratamento desses dados. O
trecho de codigo a seguir e utilizado para concatenar cada caractere recebido pela
porta serial na variavel inputString e definindo a string como completa quando um
caractere \n (fim de linha) e recebido.
1 /*
2 SerialEvent occurs whenever a new data comes in the hardware serial RX. This
44

3 routine is run between each time loop() runs, so using delay inside loop can
4 delay response. Multiple bytes of data may be available.
5 */
6 void serialEvent()
7 {
8 while (Serial.available())
9 {
10 // get the new byte:
11 char inChar = (char)Serial.read();
12 // add it to the inputString:
13 inputString += inChar;
14 // if the incoming character is a newline, set a flag so the main loop can
15 // do something about it:
16 if (inChar == '\n')
17 {
18 stringComplete = true;
19 }
20 }
21 }
Na funcao loop, tendo a string completa o programa compara com as opcoes
disponıveis, executa a respectiva acao e logo depois limpa o valor de inputString
para poder receber novos comandos.
1 void loop()
2 {
3 // print the string when a newline arrives:
4 if (stringComplete)
5 {
6 Serial.println("Received command: " + inputString);
7
8 if (inputString == "insert\n")
9 {
10 Serial.println("Insert card");
11 linearActuator.write(insertAngle);
12 }
13 else if (inputString == "remove\n")
14 {
15 Serial.println("Remove card");
16 linearActuator.write(removeAngle);
17 }
18 else
19 {
20 Serial.println("Nothing to do");
21 }
22
45

23 // clear the string:
24 inputString = "";
25 stringComplete = false;
26 }
27 }
A Arduino IDE possui uma ferramenta chamada “Serial Monitor” que per-
mite enviar dados para o Arduino via porta serial e tambem visualizar dados re-
cebidos do computador pelo Arduino. Na Figura 3.23 exemplifica a resposta do
programa a diferentes entradas.
Figura 3.23: Resposta serial da aplicacao do Arduino.
A comunicacao serial de um programa Qt com um dispositivo USB e feita pela
classe CardController para entender como e feita . A classe possui um objeto membro
da classe QSerialPort que e uma classe disponıvel no Qt para fazer comunicacao com
dispositivos em portas seriais e dois metodos publicos reponsaveis por mandar os
comandos de insercao e remocao de cartao ao Arduino.
1 #ifndef CARDCONTROLLER_H
2 #define CARDCONTROLLER_H
3
4 #include <QObject>
5 #include <QSerialPort>
6
7 class CardController : public QObject {
46
8 Q_OBJECT
9 public:
10 explicit CardController(QObject* parent = nullptr);
11 ~CardController();
12 void insert();
13 void remove();
14
15 private:
16 QSerialPort m_serialPort;
17 };
18
19 #endif // CARDCONTROLLER_H
O trecho de codigo a seguir destaca o construtor da classe CardController,
onde e feita a conexao com o Arduino. Inicialmente e feita uma iteracao em todas as
portas seriais disponıveis utilizando a classe QSerialPortInfo para pegar informacoes
e procurar em qual o Arduino esta conectado. Note que e esperado que o computador
esteja conectado a somente um Arduino, o responsavel pelo controle do atuador
linear.
1 CardController::CardController(QObject* parent)
2 : QObject(parent)
3 {
4 foreach (const QSerialPortInfo& devinfo, QSerialPortInfo::availablePorts()) {
5 if (devinfo.description().contains("Arduino")) {
6 m_serialPort.setPortName(devinfo.portName());
7 }
8 }
9
10 m_serialPort.setBaudRate(QSerialPort::Baud115200);
11 m_serialPort.setDataBits(QSerialPort::Data8);
12 m_serialPort.setFlowControl(QSerialPort::NoFlowControl);
13 m_serialPort.setParity(QSerialPort::NoParity);
14 m_serialPort.setStopBits(QSerialPort::OneStop);
15
16 if (!m_serialPort.open(QIODevice::ReadWrite)) {
17 qCritical() << QObject::tr("Falha ao abrir porta %1, erro: %2")
18 .arg(m_serialPort.portName())
19 .arg(m_serialPort.errorString())
20 << endl;
21 }
22 }
23
24 CardController::~CardController() { m_serialPort.close(); }
47

Ao ser encontrado, algumas configuracoes necessarias para se comunicar com
o Arduino sao setadas e e aberta a conexao pelo medoto QserialPort::open(). Caso
haja falha na abertura da porta, uma mensagem de erro crıtico e exibida. Uma
vez aberta a conexao, e possıvel se comunicar com o Arduino utilizando o metodo
QSerialPort::write() herdado da classe QIODevice para enviar dados, o trecho de
codigo a seguir apresenta a implementacao dos metodos insert e remove.
1 void CardController::insert() { m_serialPort.write("insert\n"); }
2
3 void CardController::remove() { m_serialPort.write("remove\n"); }
Assim o diagrama sequencial para insercao de cartao ficaria como na Figura
3.24, uma vez que os dados sao apenas enviados para o Arduino de maneira assin-
crona e nao se espera uma resposta da acao.
Figura 3.24: Diagrama sequencial da insercao de cartao.
3.5 Biblioteca Python
O projeto foi criado com intuito de fornecer uma API para que um analista
de testes pudesse utilizar o robo de dentro de seus scripts de testes. Assim, e
interessante que o usuario da ferramenta nao precise ficar restrito a utilizacao apenas
de C++ para utiliza-la. Em computacao, e chamado de binding uma API que
48
proporciona essa ligacao entre uma linguagem de programacao e uma biblioteca ou
servico de outra linguagem de programacao.
Para geracao de um binding da biblioteca para outra linguagem existe a li-
mitacao da biblioteca ser dependente de framework. Apesar do Qt de fornecer varias
classes que facilitaram o desenvolvimento da API, ele tambem impos a dependencia
de suas bibliotecas. Portanto para expor a API a outras linguagens, e preciso que es-
sas linguagens tambem tenham suporte ao Qt. Algumas das linguagens que possuem
bindings do Qt sao: Python, C#, Go, Haskell e Ruby.
Uma decisao de projeto levando em conta a experiencia em programacao da
equipe de analistas de testes foi disponibilizar inicialmente uma API em Python.
Para isso foi utilizado o SWIG, que e uma ferramenta de software para conectar
programas escritos em C ou C++ com outras linguagens, dentre elas o Python.
Para utilizar o SWIG e necessario criar um arquivo com extensao .i descrevendo
as interfaces que serao expostas para a linguagem desejada. A seguir e mostrado o
conteudo do arquivo postesttool.i que apenas expoe as classes PosTestTool e a enum
class PosModel.
1 /* file: postesttool.i */
2 %module postesttool
3 %{
4 /* Put header files here or function declarations like below */
5 #include "postesttool.h"
6 #include "model/posobject.h"
7 %}
8 %include <std_string.i>
9 /* list functions to be interfaced: */
10 class PosTestTool
11 {
12 public:
13 PosTestTool(PosModel device);
14 void insertCard();
15 void removeCard();
16 void keyPress(std::string key);
17 void write(std::string text);
18 };
19 enum class PosModel {
20 PAX_S920
21 };
Para gerar o binding basta entao executar o SWIG via linha de comando
49

escolhendo o arquivo postesttool.i da seguinte forma:
$ swig3 . 0 −c++ −python p o s t e s t t o o l . i
Depois de executado, o SWIG ira gerar dois arquivos postesttool.py com
a API que devera ser importada num script Python que deseje usar a biblioteca
e o arquivo postesttool wrap.cxx que deve ser compilado com a biblioteca C++.
Alem disso, deve ser incluıdo na compilacao, o cabecalho Python.h do diretorio de
instalacao do Python.
Apos o processo de geracao do binding, e possıvel importar a API em um
script Python. A trecho de codigo a seguir implementa o mesmo exemplo mostrado
na sessao 3.3, desta vez escrito em Python:
1 #!/usr/bin/env python
2 # -*- coding: utf-8 -*-
3 import sys
4 import postesttool as POS
5 from PySide.QtCore import *
6 from PySide.QtGui import *
7 if __name__ == '__main__':
8 app = QApplication(sys.argv)
9 ptt = POS.PosTestTool(POS.PosModel_PAX_S920)
10 ptt.write("tcc")
11 app.exec()
50
Capıtulo 4
Testes e Resultados Experimentais
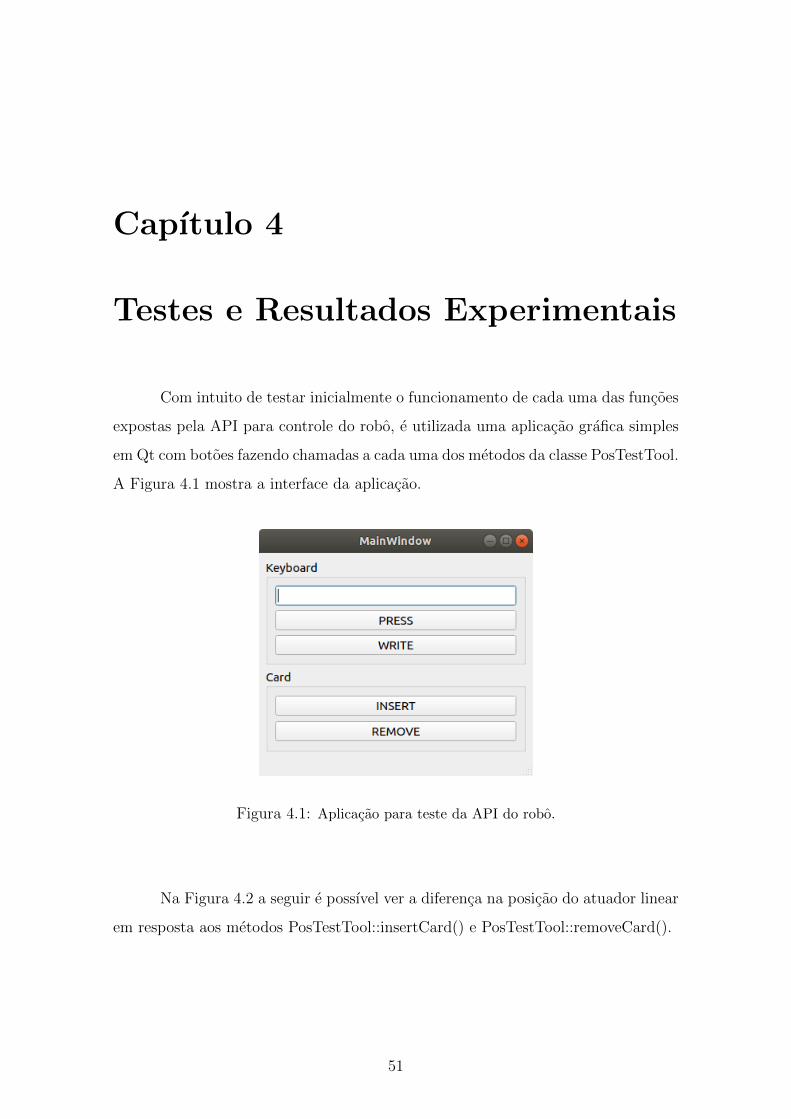
Com intuito de testar inicialmente o funcionamento de cada uma das funcoes
expostas pela API para controle do robo, e utilizada uma aplicacao grafica simples
em Qt com botoes fazendo chamadas a cada uma dos metodos da classe PosTestTool.
A Figura 4.1 mostra a interface da aplicacao.
Figura 4.1: Aplicacao para teste da API do robo.
Na Figura 4.2 a seguir e possıvel ver a diferenca na posicao do atuador linear
em resposta aos metodos PosTestTool::insertCard() e PosTestTool::removeCard().
51
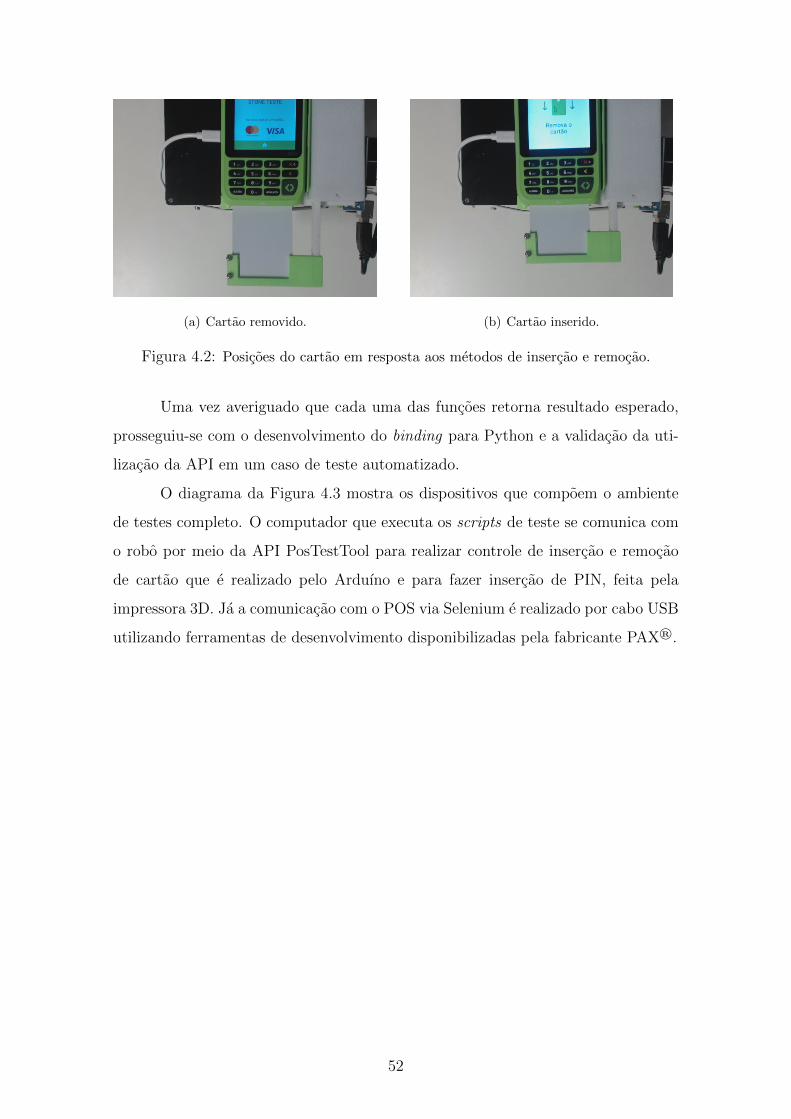
(a) Cartao removido. (b) Cartao inserido.
Figura 4.2: Posicoes do cartao em resposta aos metodos de insercao e remocao.
Uma vez averiguado que cada uma das funcoes retorna resultado esperado,
prosseguiu-se com o desenvolvimento do binding para Python e a validacao da uti-
lizacao da API em um caso de teste automatizado.
O diagrama da Figura 4.3 mostra os dispositivos que compoem o ambiente
de testes completo. O computador que executa os scripts de teste se comunica com
o robo por meio da API PosTestTool para realizar controle de insercao e remocao
de cartao que e realizado pelo Arduıno e para fazer insercao de PIN, feita pela
impressora 3D. Ja a comunicacao com o POS via Selenium e realizado por cabo USB
utilizando ferramentas de desenvolvimento disponibilizadas pela fabricante PAX®.
52

Figura 4.3: Diagrama do ambiente de testes.
O exemplo a seguir mostra uma automatizacao de uma transacao de debito
utilizando o Selenium e a API, passando por todas etapas ate aprovacao ou nao da
transacao. E importante notar que os metodos de PosTestTool sao executados de
maneira assıncrona, enquanto os metodos do Selenium sao sıncronos e bloqueiam a
execucao da aplicacao, dessa forma e necessario incluir um tempo de espera no qual
e chamado o metodo QApplication.processEvents() que e usado para nao bloquear
a execucao da aplicacao Qt, processando sua fila de eventos.
1 import sys
2 import time
3 # Importac~ao de modulos do Selenium
4 from selenium import webdriver
5 from selenium.webdriver.common.keys import Keys
6 from selenium.webdriver.common.by import By
7 from selenium.common.exceptions import TimeoutException
8 from selenium.webdriver.common.desired_capabilities import DesiredCapabilities
53

9 from selenium.webdriver.support.ui import WebDriverWait
10 from selenium.webdriver.support import expected_conditions as ExpectedConditions
11
12 # Importac~ao da biblioteca PosTestTool e dependencias
13 sys.path.append('./posTestTool')
14 import postesttool as POS
15 from PySide.QtCore import *
16 from PySide.QtGui import *
17
18 # Parametros de pagamento
19 paymentMethod = "Debito"
20 paymentAmount = "R$ 0,10"
21 installmentsMethod = "2"
22 installmentsNumber = "3"
23 cardPassword = "1234"
24
25 if __name__ == '__main__':
26 app = QApplication(sys.argv)
27
28 # Cria uma instancia de PosTestTool (inicia conexao com o robo)
29 ptt = POS.PosTestTool(POS.PosModel_PAX_S920)
30
31 # Espera ate termino da calibrac~ao inicial
32 for n in range(300):
33 time.sleep(0.1)
34 QApplication.processEvents()
35
36 # Insere cartao
37 ptt.insertCard()
38 QApplication.processEvents()
39
40 # Conecta ao servidor remoto do Selenium e procura janela com titulo 'Pagamento'
41 driver = webdriver.Remote(
42 command_executor='http://127.0.0.1:9517',
43 desired_capabilities={'browserStartWindow': 'Pagamento', 'reuseUI': True})
44
45 wait = WebDriverWait(driver, 5)
46
47 # Espera troca de pagina e seleciona metodo de pagamento
48 payment_applications_pages = wait.until(
49 ExpectedConditions.visibility_of_element_located(
50 (By.ID,"scr-methods")))
51 paymentApplicationElements = payment_applications_page
52 .find_elements_by_class_name("collection-item")
53 for element in paymentApplicationElements:
54 if paymentMethod in element.text:
55 element.click()
56 break
54

57
58 # Espera troca de pagina e insere valor desejado
59 element = wait.until(
60 ExpectedConditions.visibility_of_element_located(
61 (By.ID,'inp-proposed-amount')))
62 driver.execute_script(
63 "document.getElementById('inp-proposed-amount').value = '"
64 + paymentAmount + "'")
65 element.send_keys(Keys.RETURN)
66
67 # Insere PIN e confirma usando PosTestTool
68 ptt.write(cardPassword)
69 ptt.keyPress('RETURN')
70
71 # Espera ate termino da inserc~ao de senha
72 for n in range(300):
73 time.sleep(0.1)
74 QApplication.processEvents()
75
76 # Verifica se transacao teve erro ou sucesso
77 WebDriverWait(driver, 150).until(
78 lambda driver:
79 driver.find_element_by_id('scr-print-receipt').is_displayed()
80 or driver.find_element_by_id('scr-error').is_displayed()
81 )
82
83 if driver.find_element_by_id('scr-print-receipt').is_displayed():
84 driver.save_screenshot('payment_success.png')
85 # Caso tenha sucesso cancela impress~ao de recibo
86 driver.find_element_by_id('btn-print-receipt-no').click()
87 else:
88 # Caso tenha erro salva captura de tela em arquivo
89 driver.save_screenshot('payment_error.png')
90
91 # Remove cartao
92 ptt.removeCard()
O script salva em arquivo uma imagem com a captura de tela da aplicacao
caso ocorra erro no processamento da transacao. Assim, forcando um caso de erro
no qual uma transacao nao e completada por falha de conexao com a rede, por
exemplo, a execucao do script ira gerar a imagem mostrada na Figura 4.4.
55
(a) Captura de tela no caso de
sucesso na transacao.
(b) Captura de tela da mensa-
gem de erro de rede.
Figura 4.4: Capturas de tela realizas em teste automatizado.
O caso de teste anteriormente mostrado poderia ser alterado para ser facil-
mente configuravel e receber os parametros de pagamento por linha de comando
como mostrado a seguir.
import sys
[...]
# Parametros de pagamento
paymentMethod = sys.argv[0]
paymentAmount = sys.argv[1]
installmentsMethod = sys.argv[2]
installmentsNumber = sys.argv[3]
cardPassword = sys.argv[4]
Assim, poderia ser executado diversos casos de teste de pagamento com base
em diferentes parametros, compondo uma massa de dados de testes. Ainda, essas
rotinas poderiam ser programadas para serem realizadas periodicamente ou toda vez
que fosse gerada uma nova versao da aplicacao do POS de maneira automatizada e
consistente, sem necessidade de intervencao humana durante execucao dos testes.
A Tabela 4 mostra o tempo de execucao do teste transacional acima repetido
algumas vezes em condicao de boa conectividade, garantindo sucesso nas transacoes.
E possıvel observar que o tempo de execucao do teste e praticamente constante em
48 segundos.
56
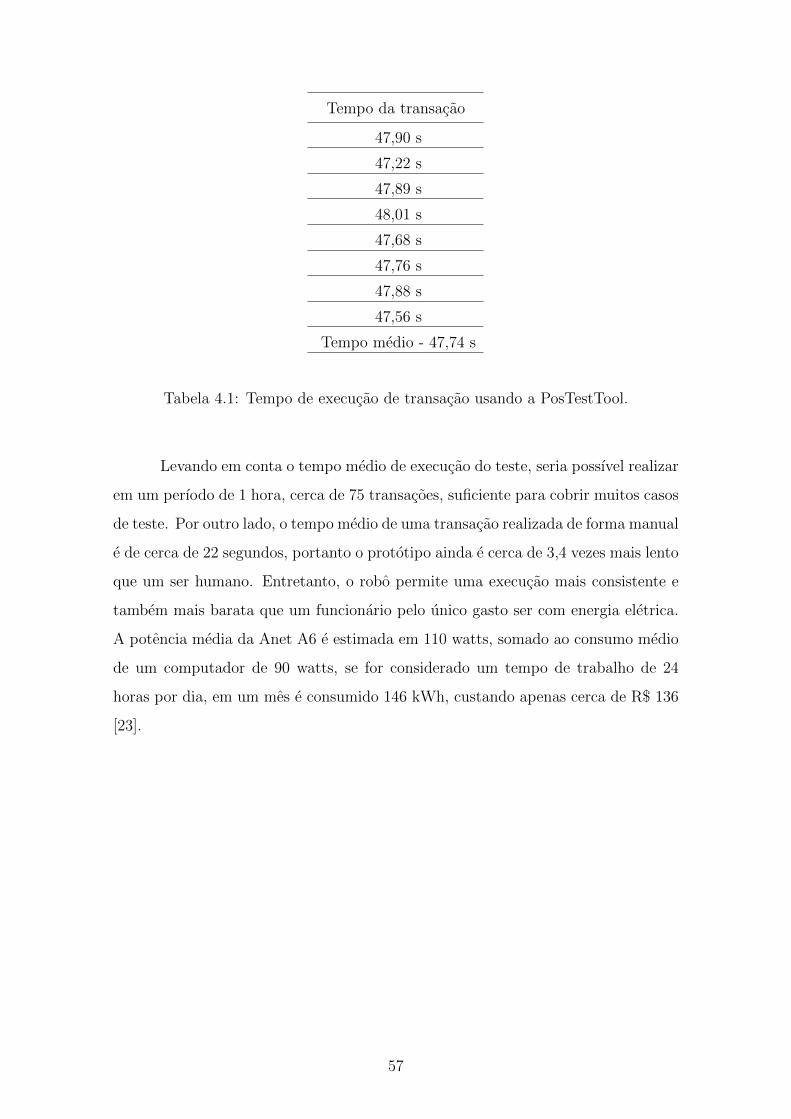
Tempo da transacao
47,90 s
47,22 s
47,89 s
48,01 s
47,68 s
47,76 s
47,88 s
47,56 s
Tempo medio - 47,74 s
Tabela 4.1: Tempo de execucao de transacao usando a PosTestTool.
Levando em conta o tempo medio de execucao do teste, seria possıvel realizar
em um perıodo de 1 hora, cerca de 75 transacoes, suficiente para cobrir muitos casos
de teste. Por outro lado, o tempo medio de uma transacao realizada de forma manual
e de cerca de 22 segundos, portanto o prototipo ainda e cerca de 3,4 vezes mais lento
que um ser humano. Entretanto, o robo permite uma execucao mais consistente e
tambem mais barata que um funcionario pelo unico gasto ser com energia eletrica.
A potencia media da Anet A6 e estimada em 110 watts, somado ao consumo medio
de um computador de 90 watts, se for considerado um tempo de trabalho de 24
horas por dia, em um mes e consumido 146 kWh, custando apenas cerca de R$ 136
[23].
57

Capıtulo 5
Conclusao
5.1 Conclusoes
Os objetivos propostos pelo projeto foram todos atendidos levando em conta
a prova de conceito de se automatizar testes para um determinado modelo de POS,
o PAX S920. Para automatizacao de outros modelos com teclado fısico, e apenas
necessaria uma adaptacao de estrutura do robo, por outro lado, a arquitetura do
software nao precisa de outras adequacoes, so e necessario inserir um arquivo JSON
descrevendo o novo modelo.
Para implementacao do projeto, se utilizou de algumas ferramentas de codigo
aberto, o que foi um grande facilitador. Com isso ficou claro que no processo de
desenvolvimento de um software e essencial a pesquisa de ferramentas que podem
ser utilizadas antes de se iniciar a fase de implementacao.
A ideia inicialmente era utilizar somente o robo para automatizacao das en-
tradas em testes funcionais, realizando todas passos do fluxo transacional como
insercao de valor de pagamento por interacao com teclado. Entretanto, pela vanta-
gem da aplicacao da Stone Pagamentos ser feita com tecnologia web, o Selenium e
capaz de fazer esse tipo de automatizacao de entrada de maneira mais eficaz. As-
sim, e possıvel concluir que nao e necessario o uso de uma unica ferramenta para a
automatizacao de testes, podendo-se combinar a utilizacao do robo somente quando
necessario e ferramentas de teste ja consolidadas como o Selenium quando possıvel.
O projeto cumpriu com a proposta de fornecer uma ferramenta capaz de
automatizar a execucao do fluxo de pagamento em terminais POS, sendo assim
58

capaz de auxiliar durante os processos de qualidade de software.
5.2 Trabalhos Futuros
Embora a API ja seja utilizavel para automatizacao de testes funcionais,
alguns pontos ainda necessitam de melhoria:
• Adequar estrutura do robo para se adequar a diferentes modelos de POS, pois
a base de apoio e o fim de curso foram projetados especificamente para o PAX
S920.
• Remover a dependencia do Qt da API. A dependencia traz o inconveniente do
analista de testes ter que se adequar a somente linguagens que tenham suporte
ao Qt.
• Permitir o controle do robo remotamente. Atualmente toda comunicacao com
o robo e feita por porta serial, assim os scripts de testes transacionais precisam
ser executados na maquina em que o robo esta conectado, dificultando o uso
da ferramenta por mais de um analista de teste ou desenvolvedor.
• Implementar interacao com teclado virtual. Alguns modelos de POS mais
recentes no mercado nao possuem teclado fısico e por isso utilizam teclado
virtual que devem ser utilizador por touchscreen.
• Utilizar OCR (Optical Character Recognition ou reconhecimento otico de ca-
racteres) para alinhar a posicao correta das teclas e assim realizar um controle
em malha fechada.
• Implementar atuador para passar cartoes de tarja magnetica.
• Projetar mecanismo para realizar troca de cartoes.
• Utilizar atuador para nivelamento do dispositivo POS ao inves de utilizar uma
base diferente para cada modelo.
Para o primeiro item, basta projetar pecas com ajustes de largura, compri-
mento e inclinacao do dispositivo, mantendo porem a posicao da origem do dispo-
59

sitivo. Tambem seria necessario alteracao na maneira que e feito o fim de curso do
eixo Z.
O controle remoto do robo poderia ser feito pela implementacao de uma
aplicacao servidor em um computador embarcado no robo que aceitasse comandos
via requisicoes pela rede, isso consequentemente iria remover a dependencia do fra-
mework Qt para o utilizador da API.
O controle de teclados virtuais tem uma complexidade porque para aumen-
tar a seguranca de privacidade do PIN, o teclado virtual numerico e exibido com
os numeros em posicoes randomicas, isso porque a interacao com telas touchscreen
deixa marcas visıveis e se a posicao fosse fixa seria mais facil identificar o PIN inse-
rido. Portanto, nesse caso para identificar a posicao dos algarismos seria necessario
usar uma camera e algoritmos de visao computacional.
O atuador para cartoes de tarja magnetica poderia ser igual ao atuador linear
utilizado para insercao e remocao de cartao, mas com a peca para segurar o cartao
diferente. Seria tambem necessario expandir o codigo do Arduino para adicionar
mais um comando e expor um metodo na API para executar a acao.
O projeto atual ainda exige o trabalho manual de realizar troca de cartoes
do robo e alem disso, ainda e necessario fornecer os dados de entrada para o cartao.
Seria possıvel eliminar essa etapa manual projetando um meio de realizar a troca
de cartoes de teste de maneira automatizada e armazenar suas informacoes em uma
base de dados.
Vale ainda ressaltar que o projeto tratou-se de um prototipo; como o robo
foi feito a partir da conversao de uma impressora 3D, isso tornou os seus custos de
construcao mais elevado. Para evolucao do robo para um produto e necessario o
projeto de mecanismos mais adequados.
60

Referencias Bibliograficas
[1] “Arduino Uno Rev3”, https://store.arduino.cc/usa/arduino-uno-rev3, 2018,
(Acesso em 27 Fevereiro 2018).
[2] “Anet A6 3D Printer-Shenzhen Anet Technology Co.,Ltd”,
http://www.anet3d.com/English/3D Printer/105.html, (Acesso em 1 Marco
2018).
[3] “AtCore: Main Page”, https://atelier.kde.org/static/atcore doc/index.html,
(Acesso em 28 Fevereiro 2018).
[4] “EFTPOS Terminal Testing Robot - Abrantix Pty Ltd”,
http://www.abrantix.com/AXRobot.html, (Acesso em 27 Fevereiro 2018).
[5] “Stone Pagamentos”, https://www.stone.com.br/, (Acesso em 16 Setembro
2018).
[6] STROUSTRUP, B., The C++ Programming. New York, Osborne, 2013.
[7] “ISO/IEC 14882:2017 - Programming Languages – C++”,
https://www.iso.org/standard/68564.html, 2017, (Acesso em 28 Fevereiro
2018).
[8] “All Classes — Qt 5.11”, http://doc.qt.io/qt-5/classes.html, 2018, (Acesso em
26 Junho 2018).
[9] “Complete software development framework – Qt”, https://www.qt.io/what-
is-qt/, 2018, (Acesso em 28 Fevereiro 2018).
[10] “Plasma - KDE.org”, https://www.kde.org/plasma-desktop, (Acesso em 28 Fe-
vereiro 2018).
61

[11] “Quality Assurance - Wikipedia”, https://en.wikipedia.org/wiki/Quality assurance,
(Acesso em 16 Setembro 2018).
[12] MYERS, G. J., The Art of Software Testing, 3rd Edition, chapter The Psyco-
logy and Economics of Software Testing, New Jersey, John Wiley & Sons, pp.
5–18, 2012.
[13] “Selenium - Web Browser Automation”, https://www.seleniumhq.org/, (Acesso
em 1 Marco 2018).
[14] “cisco-open-source/qtwebdriver: WebDriver implementation for Qt”,
https://github.com/cisco-open-source/qtwebdriver, (Acesso em 1 Marco
2018).
[15] “Arduino - Wikipedia”, https://pt.wikipedia.org/wiki/Arduino, 2018, (Acesso
em 27 Fevereiro 2018).
[16] VOLPATO, N., Prototipagem Rapida - Tecnologias e Aplicacoes. Sao Paulo,
Blucher, 2007.
[17] “Onshape: Modern CAD. Finally.”, https://www.onshape.com/, (Acesso em 1
Marco 2018).
[18] “HOME - EMVCo”, https://www.emvco.com, 2018, (Acesso em 27 Fevereiro
2018).
[19] “EMV - Wikipedia”, https://en.wikipedia.org/wiki/EMV, 2018, (Acesso em 27
Fevereiro 2018).
[20] “ABECS - Graficos”, https://www.abecs.org.br/indicadores-graficos, 2018,
(Acesso em 16 Setembro 2018).
[21] “UML - Wikipedia, a enciclopedia livre”, https://pt.wikipedia.org/wiki/UML,
(Acesso em 14 Julho 2018).
[22] GAMMA, E., Design Patterns: Elements of Reusable Object-Oriented Software.
Addison-Wesley, 1995.
62

[23] “Portal Light - Composicao da tarifa”, http://www.light.com.br/para-
residencias/Sua-Conta/composicao-da-tarifa.aspx, (Acesso em 17 Setembro
2018).
63
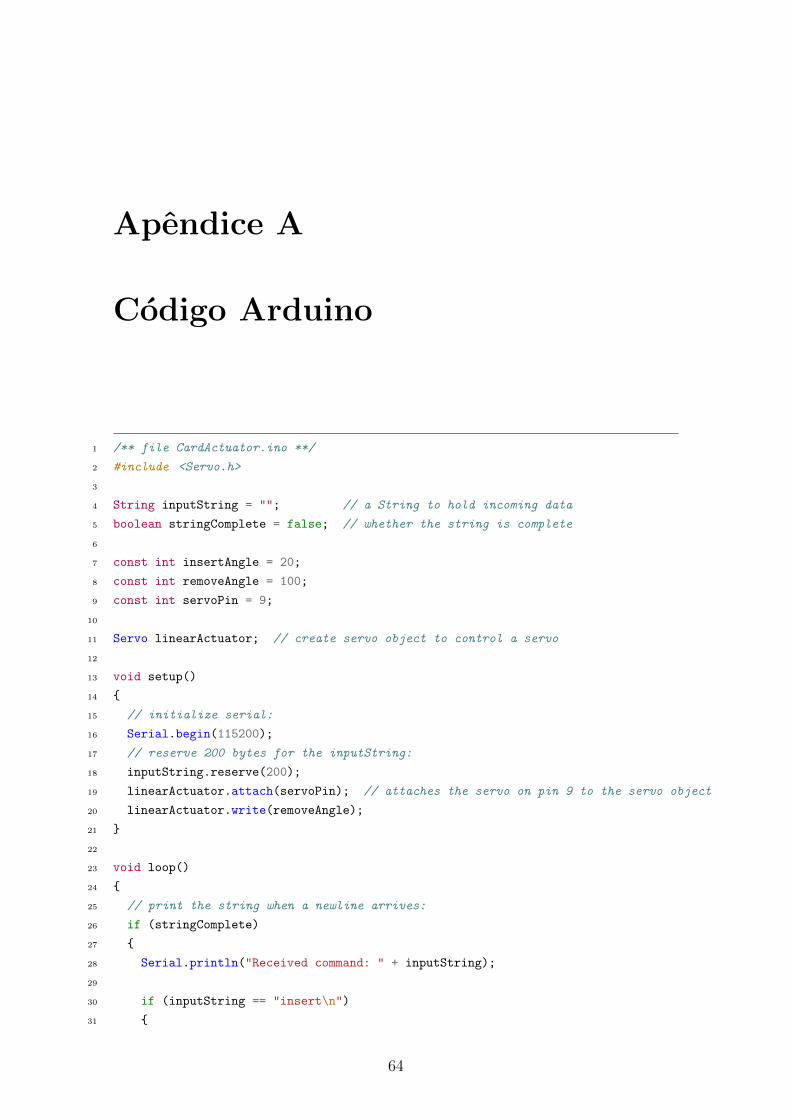
Apendice A
Codigo Arduino
1 /** file CardActuator.ino **/
2 #include <Servo.h>
3
4 String inputString = ""; // a String to hold incoming data
5 boolean stringComplete = false; // whether the string is complete
6
7 const int insertAngle = 20;
8 const int removeAngle = 100;
9 const int servoPin = 9;
10
11 Servo linearActuator; // create servo object to control a servo
12
13 void setup()
14 {
15 // initialize serial:
16 Serial.begin(115200);
17 // reserve 200 bytes for the inputString:
18 inputString.reserve(200);
19 linearActuator.attach(servoPin); // attaches the servo on pin 9 to the servo object
20 linearActuator.write(removeAngle);
21 }
22
23 void loop()
24 {
25 // print the string when a newline arrives:
26 if (stringComplete)
27 {
28 Serial.println("Received command: " + inputString);
29
30 if (inputString == "insert\n")
31 {
64

32 Serial.println("Insert card");
33 linearActuator.write(insertAngle);
34 }
35 else if (inputString == "remove\n")
36 {
37 Serial.println("Remove card");
38 linearActuator.write(removeAngle);
39 }
40 else
41 {
42 Serial.println("Nothing to do");
43 }
44
45 // clear the string:
46 inputString = "";
47 stringComplete = false;
48 }
49 }
50
51 /*
52 SerialEvent occurs whenever a new data comes in the hardware serial RX. This
53 routine is run between each time loop() runs, so using delay inside loop can
54 delay response. Multiple bytes of data may be available.
55 */
56 void serialEvent()
57 {
58 while (Serial.available())
59 {
60 // get the new byte:
61 char inChar = (char)Serial.read();
62 // add it to the inputString:
63 inputString += inChar;
64 // if the incoming character is a newline, set a flag so the main loop can
65 // do something about it:
66 if (inChar == '\n')
67 {
68 stringComplete = true;
69 }
70 }
71 }
65