programming haskell faspp11 final12
TRANSCRIPT

7/31/2019 Programming Haskell Faspp11 Final12
http://slidepdf.com/reader/full/programming-haskell-faspp11-final12 1/5
Programming Future Parallel Architectures
with Haskell and Intel ArBB
Bo Joel SvenssonDept. of Computer Science and Engineering
Chalmers University of Technology
Gothenburg, Sweden
Email: [email protected]
Ryan NewtonIntel Corporation
Hudson, MA
Email: [email protected]
Abstract—New parallel architectures, such as Cell, Intel MIC,GPUs, and tiled architectures, enable high performance but areoften hard to program. What is needed is a bridge betweenhigh-level programming models where programmers are mostproductive and modern parallel architectures. We propose thatthat bridge is Embedded Domain Specific Languages (EDSLs).
One attractive target for EDSLs is Intel ArBB, a virtualmachine for parallel, vectorized computations. We propose to wedArBB with the functional programming language Haskell, usingan EDSL that generates code for the ArBB VM. This Haskellintegration provides added safety guarantees compared to otherArBB interfaces. Further, our prototype, Harbb, is one of thefirst EDSL implementations with optimized backends for multipleparallel architectures (CPU, NVIDIA GPU, and others), allowingportability of source code over devices and their accelerators.
I. INTRODUCTION
Are radical new parallel architectures market-feasible if they
require significant changes for programmers? The jury is out.
In recent years we have seen difficult-to-program chips suffer
(e.g. Cell) and GPU vendors strive to enable more traditional
programming features [1] (e.g. C++). There is an increasingtension between ease of programming and efficiency.
The tension shows across diverse chip markets. For exam-
ple, small embedded devices are most power efficient if their
processors and operating systems omit programming features
such as virtual memory and threads [2]. At the other end of
the power spectrum, GPU’s graphics performance may suffer
due to inclusion of hardware to ease GPGPU programming. In
short, there is an opportunity cost to including extra hardware
for programmability.
In this paper, we argue that a specific technique holds
the greatest promise of solving the programmability dilemma.
Domain-specific languages, embedded within general purpose
languages (EDSLs) enable familiar programming models and flexible mapping onto new hardware. The key to having
this cake and eating it too is metaprogramming. Familiar
programming features are present, but are eliminated at an
intermediate (metaprogram evaluation) phase and therefore do
not reach the parallel hardware itself.
In pursuit of this vision, we offer a new EDSL implementa-
tion, called Harbb, that combines existing systems, Accelerate
[3] and ArBB [4], to produce a unified high-level programming
environment equally suited to multicore, vectorized CPUs, as
to GPUs and other accelerators (such as Intel MIC chips [5]).
Harbb is a single EDSL implementation with independently
optimized backends by different teams; namely, the ArBB
backend for CPU/MIC, and a CUDA backend for NVIDIA
GPU. This makes Harbb an appealing platform for fair
CPU/GPU comparisons, as well as a compelling programming
model for single-source portable performance across a rangeof parallel architectures, present and future.
I I . EMBEDDED DOMAIN-SPECIFIC LANGUAGES
Domain-specific languages—from Makefiles and LATEX to
Matlab—are almost too ubiquitous to notice. Most relevant
to our purposes, domain-specific languages (DSLs) that target
a narrow domain and expose communication patterns to the
compiler have achieved performance-portability across a wide
range of parallel architectures. StreamIt[6] is a good example.
DSLs may start out simple and focused, but if they gain
popularity they quickly grow in complexity to rival full-blown
languages. Feature creep can make DSL implementations
complex and expensive to maintain. Further, non-standard
DSL syntax and features present a learning curve for users.
In the last ten years an attractive solution to this dilemma
has emerged: embed each DSL into a general-purpose host
language that can provide common functionality with familiar
syntax and semantics.
When embedding, host language programs generate DSL
programs; the deeper the embedding, the more integrated the
DSL into the syntax and type-system of the host language.
A key host-language feature for embedding is that language
constructs can be overloaded to operate over abstract syntax
trees (ASTs)1. For example, the following simple function
operates on scalars:float f(float x) { return (2*x - 1); }
But simply by changing the types, f might be lifted to operate
on expressions (which, when evaluated, will yield floats):
exp<float> f(exp<float> x) {return (2*x - 1);
}
1This ad-hoc polymorphism is accomplished, for example, throughoperator-overloading in C++ or type classes in Haskell.

7/31/2019 Programming Haskell Faspp11 Final12
http://slidepdf.com/reader/full/programming-haskell-faspp11-final12 2/5
A common arrangement is for the host language program to
execute at runtime but to generate ASTs that are executed by
a just-in-time (DSL) compiler. This use of metaprogramming
(program generation) differs from the more common usage of
preprocessors and macros, which typically add extra phases of
computation before compile time—increasing the number of
compile-time rather than runtime phases.
One reason that EDSLs are good for productivity is that the
programmer gains the software engineering benefits of the host
language (object-orientation, higher-order-functions, modules,
etc), while not paying the cost at runtime for additional layers
of abstraction or indirection. Indeed, the embedded languages
for performance-oriented EDSLs are often simple, first-order
languages without pointers [7], [3].
As a research area, EDSLs and two-stage DSLs have been
actively pursued for at least a decade [8], [7] but are gaining
steam recently [9], [10] and are beginning to appear in com-
mercial products [4]. Further, EDSL techniques have spread
beyond their origin in the programming languages community.
For example, both Stanford’s Parallel Programming Labora-
tory (PPL) and the Berkeley Parlab are creating EDSLs as theirflagship parallel programming solutions for domains such as
machine learning and rendering [10]. Moreover, EDSLs need
not be hosted by esoteric research languages—Intel’s ArBB
embeds an array language in C++ and Berkeley’s Copperhead
[9] generates CUDA from simple Python code.
For the remainder of this paper we will focus our discussion
on the Intel ArBB VM, a virtual machine for just-in-time
generation of vector codes, which implements a restricted
domain-specific language of array computations. In this pa-
per we introduce High-level ArBB, (Harbb), an EDSL that
internally uses the ArBB VM. While Intel’s ArBB package
already includes an EDSL targeting the VM (for C++), Harbb
offers additional advantages, including more succinct pro-grams and additionally safety guarantees—namely, complete
deterministic-by-construction parallel programs (across both
host and VM languages).
III. HARBB = ARBB + ACCELERATE
Our first Harbb prototype adapts an existing EDSL called
Accelerate (Data.Array.Accelerate). Accelerate targets high-
level data-parallel programming in Haskell. Previous work on
Accelerate has focused on developing a CUDA-backend for
GPU programming. In this paper we describe our effort to
retarget Accelerate to ArBB.
With respect to determinism guarantees, the existing Intel
ArBB product represents an integration of the safe (ArBBVM) with the unsafe (C++). In the Haskell context, because
purely functional computations are guaranteed deterministic
(even when executed in parallel), and because ArBB compu-
tations invoked by Haskell functions are themselves free of
side-effects, Harbb achieves a guarantee of determinism for
complete programs that combine both Haskell computation
and ArBB VM computation.
The Accelerate programming model consists of collective
operations that can be performed over arrays, together with a
simple language of scalar expressions—in the current release,
the Haskell type system enforces that parallelism not be nested.
Accelerate’s collective operations include Map (akin to parallel
for loops) ZipWith (a generalization of elementwise vector
addition) and Fold (sum generalized)—familiar operations for
programmers versed in the functional paradigm. All of these
collective operations are easily parallelizable.
dotProd (xs :: Vector Float)(ys :: Vector Float) =
let xs_ = use xs
ys_ = use ys
in fold (+) 0 (zipWith (*) xs_ ys_)
The Accelerate code listing above specifies a function that
takes two 1-dimensional arrays as inputs (of type Vector
Float, e.g. a vector of floats). The result of the function is a
single scalar. The use function is applied to an array to convert
it for use in the collective operations provided by Accelerate;
use may result in copying the array to, for example, the GPU
in the case of Accelerate’s CUDA backend.
After applying use to bring in input data, the programmer
then constructs a data-parallel program from collective oper-ations. Above, fold is a function that takes three arguments,
here those arguments are (+), 0 and zipWith (*) xs_ ys_ .
zipWith, in turn, is a function taking three arguments, (*),
xs_ and ys_ . The zipWith operation here applies pairwise
multiplication to the two arrays and the fold sums up all the
elements into a single scalar.
Accelerate’s CUDA backend implements collective opera-
tions using a hand-tuned “skeleton” for each operation (and
possibly for different hardware versions). The kernel—for ex-
ample, the function to mapped over the dataset—is instantiated
into the body of the skeleton code. The resulting program is
compiled using the NVIDIA CUDA compiler and dynamically
linked into the running Haskell program.
IV. INTEL ARRAY BUILDING BLOCKS (ARBB )
The operations exposed by ArBB are similar to those of Ac-
celerate. In ArBB, parallel computations are expressed using
a set of built-in primitives. All vectorization and threading is
managed internally by ArBB. The programmer uses collective
operations with a clear semantics such as add_reduce that
computes the sum of the elements in a given array. ArBB also
has language constructions for control flow, conditionals and
loops. These operations have their usual sequential semantics
and are not parallelized by the system, rather, only specific
collective operations are executed in parallel.Today’s existing ArBB product is embedded in C++ and
provides special types for scalars and arrays (e.g. dense<f32>
rather than vector<float>). Using ArBB/C++ to express the
dot product computation can be done as follows:
void dot_product(const dense<f32>& a,
const dense<f32>& b,
f32& c)
{c = add_reduce(a * b);
}

7/31/2019 Programming Haskell Faspp11 Final12
http://slidepdf.com/reader/full/programming-haskell-faspp11-final12 3/5
High-levelvector program
Acceleratefront-end
AccelerateGPU backend
AccelerateArBB backend
CUDAArBB VM
Host-languageexecution
Original Source
Fig. 1. Architecture of the Harbb system.
Note that arithmetic operators such as (*) are overloaded
for to operate on arrays as well as scalars (e.g. a * b above).
Thus, the above C++ function multiplies two arrays before
summing them with add_reduce:
The code listing below is indicative to the amount of glue
code needed to invoke an ArBB computation2. It shows how
the dot product code is launched using call and how data is
bound, bind, for use in ArBB.
int main()
{double a[SIZE];
double b[SIZE];
for ( int i = 0; i < SIZE; ++i) {a[i] = ...; b[i] = ...;
}dense<f32> va, vb;
f32 vc;
bind(va, a, SIZE);
bind(vb, b, SIZE);
call(dot_product)(va, vb, &vc);
...
}
The model provided by Accelerate is slightly richer than that
of ArBB. Even the two very simple dot_product examples
above manage to illustrate this. In Accelerate there is a more
general reduction primitive called fold where in ArBB there
are specific reductions, add_reduce, mul_reduce and so on.
Not visible in these small examples is another difference,
Accelerate operations are generalized to arbitrary dimensions
while ArBB operations are limited to 1, 2, and 3 dimensions
(and 0, i.e. scalar). These differences aside, the ArBB and
Accelerate programming models are very similar.
V. IMPLEMENTATION OF HARBB
Using Accelerate and ArBB together, we propose a layered
architecture for Harbb, pictured in Figure 1. The host language
execution (via Haskell in this case) executes the programmer’s
source code, generating a vector program in the restricted
language of the Accelerate front-end. Then either Accelerate
backend—ArBB or CUDA—may be used. The bottom layer
of the ArBB backend consists of a direct mapping of the ArBB
virtual machine API (VMAPI) into Haskell including one-to-
one bindings for each C function. To [partially] automate the
creation of these bindings we used the C2HS system [11]. The
2In OpenCL and CUDA the glue code situation is even worse
ArBB/Haskell bindings are very low-level. The idea is that the
ArBB/Haskell bindings should be used to implement backends
for higher-level data-parallel EDSLs.
To address the functionality mismatch between Accelerate
and ArBB, when possible we reencode the users Accelerate
program using existing ArBB mechanisms. Our prototype
does not support 100% of Accelerate’s compute model (for
example, only supporting up to three-dimensional arrays), but
the remaining functionality can be mapped onto ArBB in time
using known methods—for example, our compiler could map
higher dimensional arrays onto a specific lower-dimensional
data-layout.
One example of a functionality discrepancy bridged by our
implementation is reductions. As mentioned in IV, Accelerate
allows the programmer to reduce using an arbitrary associative
function, but ArBB has only built-in reductions with fixed
operations (add, multiply, xor, etc). We plan to provide general
reductions in the ArBB backend by a two-fold strategy:
1) Attempt to map an Accelerate reduction directly onto an
ArBB primitive such as add_reduce.
2) Apply a general reduction technique based on log(N )map operations over successively halving array sizes.
Essentially, cut the array in half, combine the halves,
repeat. In [12] this approach is explained in the context
of CUDA.
In our current experiments, approach (2) is significantly
slower. Therefore, the ideal would be that ArBB exposed
general reduction directly in its programming model. We
expect this functionality to be added in future releases. In the
meantime we plan to explore a technique that would allow
us to maximize the number of situations in which (1) above
applies. Namely, a reduce operation can often be factored into
a map followed by a reduce. For example, a reduction that
multiplies each input number by a coefficient and sums theresults can be split into a map phase for the multiplication
followed by the built-in add_reduce operator.
Another choice faced by our implementation is the granular-
ity at which the ArBB JIT is invoked. Specifically, should each
collective operation result in its own call to the ArBB JIT (in
ArBB terminology, immediate-mode, akin to the pre-OpenGL
3.0 immediate mode), or should multiple collective operations
be placed together inside an ArBB function and passed to the
JIT? We will call the latter approach retained-mode.
Retained-mode generally offers performance benefits; a
bigger chunk is given to the JIT compiler, enabling cross-
optimization between collective operations. Our prototype
Accelerate backend uses ArBB in a combination of immediate-and retained-mode. The main collective operations are com-
piled using the retained-mode. For example, in the case of a
map f operation first the function to be mapped is created and
compiled using retained-mode then a small mapper function
is also created and compiled using retained-mode. Between
the collective operations the backend needs to perform data
management and copying, which are performed in immediate-
mode. It is our belief that Harbb would benefit from using
retained-mode exclusively but we leave that as future work.
7/31/2019 Programming Haskell Faspp11 Final12
http://slidepdf.com/reader/full/programming-haskell-faspp11-final12 4/5
blackscholes (xs :: Vector (Float,Float,Float)) =
map kernel (use xs)
kernel x =
let (price, strike, years) = unlift x
r = 0.02 – riskfree constant v = 0.30 – volatility constant sqrtT = sqrt years
d1 = (log (pr ice / str ike) +
(r + 0.5 * v * v) * years) /
(v * sqrtT)d2 = d1 - v * sqrtT
c n d d = d >* 0 ? (1.0 - cndfn d, cndfn d)
cndD1 = cnd d1
cndD2 = cnd d2
expRT = exp (-r * years)
in lift ( price * cndD1 -
strike * expRT * cndD2
, strike * expRT * (1.0 - cndD2) -
price * (1.0 - cndD1))
cndfn d =
let poly = horner coeff
coeff = [0, 0.31, -0.35, 1.78, -1.82, 1.33]
rsqrt = 0.39894228040143267793994
k = 1.0 / (1.0 + 0.2316419 * abs d)
in rsqrt * exp (-0.5*d*d) * poly k
horner coeff x =
let m a d d a b = b*x + a
in foldr1 madd coeff
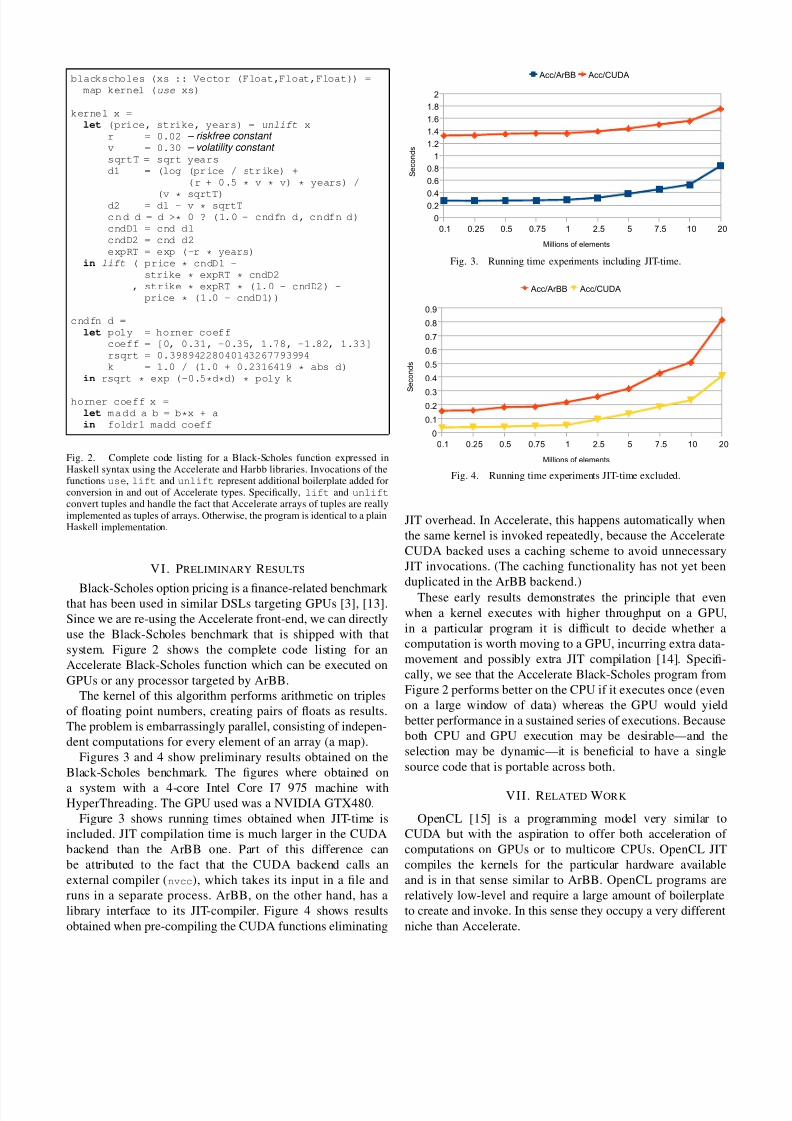
Fig. 2. Complete code listing for a Black-Scholes function expressed inHaskell syntax using the Accelerate and Harbb libraries. Invocations of thefunctions use, lift and unlift represent additional boilerplate added forconversion in and out of Accelerate types. Specifically, lift and unlift
convert tuples and handle the fact that Accelerate arrays of tuples are reallyimplemented as tuples of arrays. Otherwise, the program is identical to a plainHaskell implementation.
VI . PRELIMINARY RESULTS
Black-Scholes option pricing is a finance-related benchmark that has been used in similar DSLs targeting GPUs [3], [13].
Since we are re-using the Accelerate front-end, we can directly
use the Black-Scholes benchmark that is shipped with that
system. Figure 2 shows the complete code listing for an
Accelerate Black-Scholes function which can be executed on
GPUs or any processor targeted by ArBB.
The kernel of this algorithm performs arithmetic on triples
of floating point numbers, creating pairs of floats as results.
The problem is embarrassingly parallel, consisting of indepen-
dent computations for every element of an array (a map).
Figures 3 and 4 show preliminary results obtained on the
Black-Scholes benchmark. The figures where obtained on
a system with a 4-core Intel Core I7 975 machine withHyperThreading. The GPU used was a NVIDIA GTX480.
Figure 3 shows running times obtained when JIT-time is
included. JIT compilation time is much larger in the CUDA
backend than the ArBB one. Part of this difference can
be attributed to the fact that the CUDA backend calls an
external compiler (nvcc), which takes its input in a file and
runs in a separate process. ArBB, on the other hand, has a
library interface to its JIT-compiler. Figure 4 shows results
obtained when pre-compiling the CUDA functions eliminating
)
*+% *+,- *+- *+.- % ,+- - .+- %* ,*
*
*+,*+/
*+0
*+1
%
%+,
%+/
%+0
%+1
,
45564722 455689:4)
;<==<>?@)>A)#=#B#?$@
! # 5 > ? C @
) )
Fig. 3. Running time experiments including JIT-time.
)
)
) )
*+% *+,- *+- *+.- % ,+- - .+- %* ,*
*
*+%
*+,*+D
*+/
*+-
*+0
*+.
*+1
*+E
45564722 455689:4)
;<==<>?@)>A)#=#B#?$@
! # 5 > ? C @
Fig. 4. Running time experiments JIT-time excluded.
JIT overhead. In Accelerate, this happens automatically when
the same kernel is invoked repeatedly, because the Accelerate
CUDA backed uses a caching scheme to avoid unnecessary
JIT invocations. (The caching functionality has not yet been
duplicated in the ArBB backend.)
These early results demonstrates the principle that even
when a kernel executes with higher throughput on a GPU,
in a particular program it is difficult to decide whether a
computation is worth moving to a GPU, incurring extra data-
movement and possibly extra JIT compilation [14]. Specifi-
cally, we see that the Accelerate Black-Scholes program from
Figure 2 performs better on the CPU if it executes once (even
on a large window of data) whereas the GPU would yield
better performance in a sustained series of executions. Because
both CPU and GPU execution may be desirable—and the
selection may be dynamic—it is beneficial to have a single
source code that is portable across both.
VII. RELATED WOR K
OpenCL [15] is a programming model very similar to
CUDA but with the aspiration to offer both acceleration of
computations on GPUs or to multicore CPUs. OpenCL JIT
compiles the kernels for the particular hardware available
and is in that sense similar to ArBB. OpenCL programs are
relatively low-level and require a large amount of boilerplate
to create and invoke. In this sense they occupy a very different
niche than Accelerate.

7/31/2019 Programming Haskell Faspp11 Final12
http://slidepdf.com/reader/full/programming-haskell-faspp11-final12 5/5
Microsoft Accelerator [16] is an embedded language with
similar aspirations as ArBB, that is, to target a diverse range
of architectures using the same source code. Accelerate can
be used from the C# language or the functional F# language
and targets GPUs or of CPUs and their vector units.
Many CPU and GPU comparisons, and some CPU/GPU
workload partitioners [17], rely on redundant hand-written
versions of all kernels (though some systems like Qilin [18]
allow a single source code). It is difficult in this kind of
scenario to make fair comparisons, controlling for the amount
of effort put into the respective implementations. For example,
comparing unoptimized serial CPU implementations vs. GPU
ones is not informative [19]. In Harbb controlling for effort
need happen only once—both CUDA and ArBB are indepen-
dently optimized by their respective teams of engineers—not
for each benchmark.
VIII. DISCUSSION AND CONCLUSIONS
We have demonstrated that an EDSL such as Accelerate is
sufficiently platform-independent to break free of its original
hardware target (CUDA/GPU) and create efficient programs on
other architectures. This gives us hope that Harbb/Accelerate
programs will be forward-portable to future parallel architec-
tures and instruction sets.
The EDSL approach changes the playing field for the
designer of compiler backends. Rather than contending with
full blown languages and their complexities (e.g. pointers,
aliasing, inheritance, virtual functions, etc), compiler backends
can focus on simple value-oriented compute languages.
But the EDSL method solves only part of the performance-
portability problem. Simple as EDSL target languages may
be, there remains a substantial challenge in mapping them
efficiently to the diversity of parallel architectures available
now and in the near future. For example, the idiosyncrasiesof memory bank access on NVIDIA GPUs must be taken into
account to generate efficient implementations of the high-level
collective operations that we have discussed.
This is a compiler backend research challenge. The skele-
tons method mentioned in Section III is one approach to this
problem, as are the optimizations studied in the Copperhead
[9] and Obsidian [20] projects. On the other hand, systems
that rely on advanced optimizations typically suffer to some
extent from performance-predictability problems. Thus achiev-
ing portable, predictable performance on a wide range of
architectures—even for the simplest target languages—will be
the subject of much future work.
REFERENCES
[1] NVIDIA. (2009) NVIDIA’s next generation cuda compute architecture:Fermi. [Online]. Available: http://www.nvidia.com/content/PDF/fermiwhite papers/NVIDIA Fermi Compute Architecture Whitepaper.pdf
[2] J. Hill, R. Szewczyk, A. Woo, S. Hollar, D. Culler, and K. Pister,“System architecture directions for networked sensors,” in Architecturalsupport for programming languages and operating systems, ser.ASPLOS-IX. New York, NY, USA: ACM, 2000, pp. 93–104.[Online]. Available: http://doi.acm.org/10.1145/378993.379006
[3] M. M. T. Chakravarty, G. Keller, S. Lee, T. L. McDonell, and V. Grover.Accelerating Haskell Array Codes with Multicore GPUs. [Online].Available: http://www.cse.unsw.edu.au/ ∼chak/papers/CKLM+10.html
[4] Intel. Intel array building blocks. [Online]. Available: http://software.intel.com/sites/products/collateral/arbb/arbb product brief.pdf
[5] L. Seiler, D. Carmean, E. Sprangle, T. Forsyth, M. Abrash, P. Dubey,S. Junkins, A. Lake, J. Sugerman, R. Cavin, R. Espasa, E. Grochowski,T. Juan, and P. Hanrahan, “Larrabee: a many-core x86 architecture forvisual computing,” ACM Trans. Graph., vol. 27, pp. 18:1–18:15, August2008. [Online]. Available: http://doi.acm.org/10.1145/1360612.1360617
[6] M. I. Gordon et al., “Exploiting coarse-grained task, data, and pipelineparallelism in stream programs,” in ASPLOS-XII: Proceedings of the12th international conference on Architectural support for programming
languages and operating systems. New York, NY, USA: ACM, 2006,pp. 151–162.
[7] R. R. Newton, L. D. Girod, M. B. Craig, S. R. Madden, andJ. G. Morrisett, “Design and evaluation of a compiler for embeddedstream programs,” in Proceedings of the 2008 ACM SIGPLAN-SIGBED
conference on Languages, compilers, and tools for embedded systems,ser. LCTES ’08. New York, NY, USA: ACM, 2008, pp. 131–140.[Online]. Available: http://doi.acm.org/10.1145/1375657.1375675
[8] C. Elliott, “Programming graphics processors functionally,” inProceedings of the 2004 Haskell Workshop. ACM Press, 2004.[Online]. Available: http://conal.net/papers/Vertigo/
[9] B. Catanzaro, M. Garland, and K. Keutzer, “Copperhead: compilingan embedded data parallel language,” in Proc. of Principlesand practice of parallel programming, ser. PPoPP ’11. NewYork, NY, USA: ACM, 2011, pp. 47–56. [Online]. Available:http://doi.acm.org/10.1145/1941553.1941562
[10] Stanford. Stanford pervasive parallelism laboratory. [Online]. Available:
http://ppl.stanford.edu/wiki/index.php/Pervasive Parallelism Laboratory[11] M. M. Chakravarty, “C → Haskell, or Yet Another Interfacing Tool,”
in In Koopman and Clack [23. Springer-Verlag, 1999, pp. 131–148.[12] M. Harris. Optimizing parallel reduction in CUDA. [Online]. Avail-
able: http://developer.download.nvidia.com/compute/cuda/1 1/Website/ projects/reduction/doc/reduction.pdf
[13] G. Mainland and G. Morrisett, “Nikola: Embedding Compiled GPUFunctions in Haskell,” in Proceedings of the third ACM Haskellsymposium on Haskell. ACM, 2010, pp. 67–78. [Online]. Available:http://doi.acm.org/10.1145/1863523.1863533
[14] C. Gregg and K. Hazelwood, “Where is the data? why you cannotdebate gpu vs. cpu performance without the answer,” in Symposiumon Performance Analysis of Systems and Software (ISPASS), 2011.
[15] Khronos OpenCL Working Group, “The opencl specification, version1.0.29,” http://khronos.org/registry/cl/specs/opencl-1.0.29.pdf, 2008.
[16] M. Research. An i ntroducti on to microsoft accel eratorv2. [Online]. Available: http://research.microsoft.com/en-us/projects/
accelerator/accelerator intro.docx[17] M. D. Linderman, J. D. Collins, H. Wang, and T. H. Meng,
“Merge: a programming model for heterogeneous multi-core systems,”SIGPLAN Not., vol. 43, pp. 287–296, March 2008. [Online]. Available:http://doi.acm.org/10.1145/1353536.1346318
[18] C.-K. Luk, S. Hong, and H. Kim, “Qilin: exploiting parallelism onheterogeneous multiprocessors with adaptive mapping,” in Proc. of
IEEE/ACM International Symposium on Microarchitecture, ser. MICRO42. New York, NY, USA: ACM, 2009, pp. 45–55. [Online]. Available:http://doi.acm.org/10.1145/1669112.1669121
[19] V. W. Lee, C. Kim, J. Chhugani, M. Deisher, D. Kim, A. D.Nguyen, N. Satish, M. Smelyanskiy, S. Chennupaty, P. Hammarlund,R. Singhal, and P. Dubey, “Debunking the 100x gpu vs. cpu myth:an evaluation of throughput computing on cpu and gpu,” SIGARCH Comput. Archit. News, vol. 38, pp. 451–460, June 2010. [Online].Available: http://doi.acm.org/10.1145/1816038.1816021
[20] Joel Svensson, “Obsidian: GPU Kernel Programming in Haskell,”
Computer Science and Enginering, Chalmers University of Technology, Gothenburg, Tech. Rep. 77L, 2011, iSSN 1652-876X.[Online]. Available: http://publications.lib.chalmers.se/cpl/record/index.xsql?pubid=136543