programme de mathématiques en mpsi...
TRANSCRIPT

MPSI-MP Année 2005-2006
Programme de Mathématiques en MPSIFORMULAIRE, DEFINITIONS ET THÉORÈMES1
1 Nombres réels
• R est un corps commutatif totalement ordonné, c’est à dire un ensemble muni de deux lois + et ×, tellesque (R,+) soit un groupe commutatif, (R,+,×) un anneau intègre dans lequel tous les éléments non nulssont inversibles. R est muni d’une relation d’ordre total6 ( x6y ⇔ y−x ∈ R+) compatible avec l’addition(x6y ⇒ x+ a6y + a) et la multiplication par un réel positif. (x6y et a>0⇒ xa6ya)
• Soit A⊂ R une partie de R. On dit que A admet une borne supérieure dans R lorsqu’il existe a ∈ R telque a soit le plus petit élément de l’ensemble des majorants de la partie A, c’est à dire
∀x ∈ A, x6a et ∀b < a,∃x ∈ A, b < xLorsqu’elle existe, cette borne supérieure est unique. Elle est notée sup(A). On définit de façon symétrique
la notion de borne inférieure. Par exemple, si A =n− 1n+ 2
, n ∈ N on vérifie:
sup(A) = 1, inf(A) = min(A) = −12: noter que A ne possède pas de plus grand élément pour cet
exemple.
• On introduit par commodité l’ensemble R = R∪ −∞,+∞ , afin de pouvoir étendre la notation sup(A)à toute partie non vide de R : par exemple sup(N) = +∞
• Théorème d’existence de la borne supérieure dans RDans R, toute partie non vide et majorée admet une borne supérieure. On peut énoncer un résultat ana-
logue pour les parties non vides et minorées qui admettent une borne inférieure.
• I est un intervalle de R⇔ I est une partie convexe de R, c’est à dire:∀(x, y) ∈ I2,∀λ ∈ [0, 1],λx+ (1− λ)y ∈ I
Exemple I =]−∞,−√5]
• Inégalités triangulaires:∀(x, y) ∈ R2, ||x|− |y||6 |x+ y|6 |x|+ |y|
On obtient ||x|− |y||6 |x+ y| à partir de |x0 + y0|6 |x0|+ |y0| en posant x0 = x+ y et y0 = −xde même
∀(x, y) ∈ R2, |x− y|6 |x|+ |y|
• Congruence modulo un réel a strictement positif:Soit a > 0 : deux réels x et y sont congrus modulo a ssi y − x ∈ a.Z = ka, k ∈ ZOn montre que tout réel x est congru modulo a à un seul réel y appartenant à l’intervalle [0, a[:
∀x ∈ R,∃!n ∈ Z,∃!y ∈ [0, a[, x = na+ y1 Seuls les résultats sont énoncés, sans démonstrations, mais accompagnés d’exemples . Il ne s’agit pas d’un cours mais plutôt d’un recueil de définitions, qui peut permettre par son
caractère abrupt de vérifier que l’on a bien compris tel ou tel concept.
1 lycée Dessaignes 2005-2006

Exemple: −53≡ 13mod 2
• Partie entière d’un réel: lorsque a = 1, l’entier relatif n est appelé partie entière de x, notée n = E(x) ety = x−E(x) est parfois appelé la partie fractionnaire de x.
∀x ∈ R, x ≡ x−E(x)mod 1On retiendra:
E(x) ∈ Z et E(x)6x < E(x) + 1Remarque : On retrouve l’entier n défini plus haut dans la congruence modulo a par x = na+ y à l’aide
de la partie entière : on a en effet n = E(x
a)
• Valeur décimale approchée par défaut d’un réel:soit x ∈ [0, 1[ et n un entier naturel non nul:
∃!(a1, ..., an) ∈ 0, 1, 2, ..., 9n, si y =n
k=1
ak10−k, alors y6x < y + 10−n
y est la valeur décimale approchée par défaut de x à 10−n près. De plus∀k ∈ 1, .., n, ak = E(10kx)− 10E(10k−1x)
par exemple si x =√2− 1 = 0, 414... alors a1 = 4, a2 = 1, a3 = 4
• Isomorphisme du groupe (R,+) dans le groupe (R+∗, .)La fonction exponentielle établit un isomorphisme de groupe de (R,+) dans (R+∗, .), dont l’isomor-
phisme réciproque est la fonction logarithme népérien∀(x, y) ∈ R2, exp(x+ y) = exp(x) exp(y)∀(x, y) ∈ R+∗2, ln(xy) = ln(x) + ln(y)
Attention, isomorphisme de groupe est un terme qui,isolé, ne veut rien dire : il faut bien préciser lastructure de groupe (A, ∗..) de départ et la structure de groupe (B, T..) d’arrivée ( en fait préciser les lois )et ne pas oublier bien sûr de vérifier le caractére bijectif de l’application ainsi que le respect des lois ∗, T
2 Suites de nombres réelsUne suite de nombre réels est une application de N dans R . L’ensemble des suites de nombres réels est notéRN. On note u ∈ RN ou (un)n∈N ∈ RN.Soit u une suite de nombres réels
• u estmajorée (resp minorée) ssi∃M ∈ R,∀n ∈ N, un6M (resp un>M)
• u est bornée ssi∃M ∈ R+,∀n ∈ N, |un|6M
ce qui revient à dire qu’elle est à la fois minorée et majorée
• u est croissante (resp décroissante) si∀n ∈ N, un+1 − un>0 (resp un+1 − un60)
• On appelle suite extraite de (un)n∈N toute suite (vn)n∈N =(uϕ(n))n∈N formée de certains termes de la suiteu, extraits à l’aide d’une fonction ϕ : N→ N strictement croissante. Si u est bornée, toutes ses suitesextraites le sont. De même si u est monotone, il en va de même de toutes ses suites extraites.Par exemple, la suite (un = (1 + (−1)n)n)n∈N est minorée, non majorée, non monotone. Sa suite
extraite ( u2n+1) obtenue pour ϕ(n) = 2n+ 1 est constante égale à 0.
2 lycée Dessaignes 2004-2005

2.1 Suites convergentes
• La suite u ∈ RN est convergente vers a ∈ R lorque∀ε > 0,∃N ∈ N,∀n>N, |un − a|6ε
Par exemple la suite un =n− 1n+ 2
est convergente vers 1
• Notation: limn→∞
un = a:
limn→∞
un = a⇔ limn→∞
un − a = 0
• Remarque : il est équivalent de dire limn→∞
un = 0 ou limn→∞
|un| = 0
• Une suite est convergente s’il existe un réel a tel que limn→∞
un = a
Sinon elle diverge.Par exemple la suite un = (1 + (−1)n)n divergeToute suite convergente est bornée
• Les suites convergentes forment un sous espace vectoriel de RN. De plus:Si lim
n→∞un = a et lim
n→∞vn = b alors ∀(λ, µ) ∈ R2 (λun + µvn)n∈N converge et lim
n→∞λun + µvn = λa+ µb
• Les suites convergentes vers 0 forment un sous espace vectoriel de RN. De plusSi lim
n→+∞un = 0 et si v est bornée alors lim
n→+∞vnun = 0
• Lorsqu’une suite converge vers a > 0 ,∃N ∈ N, ∀n>N, un > 0
• Si une suite (un)n∈N converge vers a , toute suite extraite de u converge vers a.
2.2 Suites divergentes vers +∞ (resp -∞)
• La suite u diverge vers +∞ (resp -∞) ssi∀A ∈ R,∃N ∈ N,∀n>N, A6un (resp un6A)
Attention, une suite qui diverge ne diverge pas forcément vers+∞ ou -∞ comme lemontrent les exemplesun = (1 + (−1)n)n , vn = cos(n)
• Si une suite (un)n∈N diverge vers +∞ , toute suite extraite de u diverge vers +∞
• Les suites obéissent aux règles suivantes en ce qui concerne les inégalitésSi lim
n→+∞vn = 0 et si ∃N ∈ N,∀n>N, |un|6 |vn| alors lim
n→+∞un = 0
Si limn→+∞
un = +∞ et si ∃N ∈ N,∀n>N, un6vn alors limn→+∞
vn = +∞Si lim
n→∞un = lim
n→∞wn = a et si ∀n ∈ N, un6vn6wn , alors lim
n→∞vn = a
• Suites de références an, nα|a| < 1⇒ lim an = 0 , |a| > 1⇒ lim |a|n = +∞α < 0 ⇒ limnα = 0, α > 0 ⇒ limnα = +∞
2.3 Relations de Comparaison
Etant donnée une suite (vn) de nombres réels non nuls, et une suite (un) de nombres réels:
• u est dominée par v lorsque
3 lycée Dessaignes 2005-2006

∃A ∈ R+,∀n ∈ N,unvn
6AOn note un = O
n→∞(vn) (grand O )
• u est négligeable devant v lorsque:
∀ε > 0,∃N ∈ N,∀n>N, unvn
6ε
• ce qui revient à dire que :limn→∞
(unvn) = 0
On note un = on→∞
(vn) (petit o)La suite u est équivalente à la suite v lorsque un − vn = o
n→∞(vn), ce qui revient à dire que :
∀ε > 0, ∃N ∈ N, ∀n ≥ N, |un − vn| ≤ ε |vn|Ou encore lorsque vn ne s’annulle pas:
limn→∞
(unvn) = 1
On note un ∼n→∞
vn
• Si un ∼n→∞
vn et an ∼n→∞
bn alors anun ∼n→∞
bnvn etanun∼
n→∞bnvn
• Si un = an + bn et bn = on→∞
(an) alors un ∼n→∞
an
• Attention de ne pas ajouter deux équivalentsObserver le contre exemple suivant :
n+ 1 ∼n→∞
n+ 2 et − n ∼n→∞
−n+ 1n
cependant 1 n’est pas équivalent à 2 +1
n
• Une erreur très répandue est de croire que si deux suites sont équivalentes et si l’une est croissante à partird’un certain rang l’autre aussi : on peut se convaincre du contraire grâce au contre-exemple un = n, vn =n+ (−1)n
• Voici le tableau des ’’ Croissances comparées ’’
0 < a < b⇒ an = o(bn) soit lim∞(an
bn) = 0
1 < a et α ∈ R ⇒ nα = o(an) soit lim∞(a−nnα) = 0
|a| < 1 et α ∈ R ⇒ an = o(nα) soit lim∞(ann−α) = 0
α > 0 et β ∈ R ⇒ (ln(n))β = o(nα) soit lim∞(n−α(ln(n))β) = 0
α < 0 et β ∈ R ⇒ nα = o((ln(n))β) soit lim∞(nα(ln(n))−β) = 0
a ∈ R et α ∈ R ⇒ nα = o(n!) et an = o(n!) soit lim∞(an
n!) = lim
∞(nα
n!) = 0
La hiérarchie est donc la suivante lorsque a > 1 et α > 0 , la suite factorielle domine an et nα , la suitean domine nα , et la suite nα domine les suites (ln(n))β
• Si un ∼n→∞
vn alors un et vn sont de même signe à partir d’un certain rang.
2.4 Suites usuelles
4 lycée Dessaignes 2004-2005

• Suites arithmétiquesun+1 = un + r
un = u0 + nrn
k=p
uk = (n− p+ 1)up + un2
n
k=1
k =n(n+ 1)
2
• Suites géométriquesun+1 = qun
un = qnu0n
k=p
uk = up1− qn−p+11− q si q 6= 1
n
k=0
qk =1− qn+11− q
• Suites arithmético-géométriques (q 6= 1)un+1 = qun + r⇔ (un+1 − l) = q(un − l) avec l = lq + run = qn(u0 − l) + l
Exemple: un+1 = 2un + 1 et u0 = 1. On cherche le point fixe l de la fonction f(x) = 2x+ 1 qui est iciégal à -1 , puis un + 1 = 2n(u0 + 1) soit un = 2n+1 − 1
• Sommes usuellesn
k=0
k2 =n(n+ 1)(2n+ 1)
6
n
k=0
k3 = (n
k=1
k)2 =n2(n+ 1)2
4
• Suites homographiquesun+1 =
aun + b
cun + d
ces suites peuvent s’étudier en cherchant les solutions l1, l2 de l’équation l =al + b
cl + d,
puis en se ramenant lorsque l1 6= l2 à la suite vn =un − l1un − l2
, qui vérifie
vn+1 =l2l1vn
ce qui permet d’expliciter un
• Théorème de la limite monotone : Toute suite croissante de nombres réels qui est majorée est convergente: on a alors
limun = sup un, n ∈ NL’énoncé subsiste pour les suites décroissantes et minorées , et
limun = inf un, n ∈ N
• Théorème des suites adjacentes: Si deux suites u, v vérifient : u croissante , v décroissante et lim vn−un =0, alors ∀n ∈ N, un6vn et les deux suites u et v convergent vers la même limite l; de plus
∀(n, p) ∈ N, un 6 l 6 vp
5 lycée Dessaignes 2005-2006

• Théorème des segments emboités : Soit In = [un, vn] une suite d’intervalles fermés bornés non vides deR, décroissante pour l’inclusion ( ∀n ∈ N, In+1⊂In) : alors
n∈NIn 6= ∅
Cas particulier des suites dichotomiques : si la suite In = [un,vn] vérifie:
∀n ∈ N, In+1 = [un,un + vn2
] ou In+1 = [un + vn2
, vn]
alors∃l ∈ R,
n∈NIn = l
• Théorème de Bolzano-Weierstrass : Si la suite u ∈ RN est bornée , il existe une suite extraite de u quiconverge dans R.
3 Fonctions réelles d’une variable réelleSoit A une partie de R: on note RA l’ensemble des fonctions de A à valeurs dans R. (Remarque: cette notationa pour origine le cas ou A est un ensemble fini A = x1, .., xn de cardinal n, puisqu’alors une application fde A dans R est caractérisée par le n-uplet y1 = f(x1), ..., yn = f(xn) ∈ Rn. On retrouve ainsi les suitesréelles de RN comme applications de N dans R. C’est d’ailleurs comme cela qu’il faut les voir.....)Cet ensemble est muni des trois lois usuelles suivantes : si f et g sont deux fonctions appartenant à RA et siλ ∈ R , alors+ addition des fonctions: ∀x ∈ A, (f + g)(x) = f(x) + g(x),× produit des fonctions: ∀x ∈ A, (f × g)(x) = f(x)g(x). produit d’une fonction par un scalaire ∀x ∈ A, (λ.f)(x) = λf(x)Ainsi définies , ces lois font de (A,+,×, .) une R algèbre commutative, dont le vecteur nul est la fonctionconstante égale à 0 notée 0 : (x ∈ A → 0) et l’élément unité est la fonction constante égale à 1 , notée 1(x ∈ A 7→ 1)
• Une fonction f ∈ RA estmajorée , minorée , bornée si (respectivement)
∃M ∈ R+,∀x ∈ A, f(x)6M (majorée) ou ∃M ∈ R+,∀x ∈ A, f(x)>M (minorée)∃M ∈ R+,∀x ∈ A, |f(x)|6M (bornée)
• L’ensemble des fonctions bornées forme une sous-algèbre de RA
• f admet en x0 unmaximum absolu sur A (resp minimum absolu sur A) ssi
∀x ∈ A, f(x)6f(x0) (resp f(x)>f(x0))On note
f(x0) = max f(x), x ∈ A = maxx∈A
f(x) = maxAf
respectivementf(x0) = min f(x), x ∈ A = min
x∈Af(x) = min
Af
• f admet en x0 unmaximum local sur A(resp minimum local) ssi∃α > 0,∀x ∈ A∩]x0 − α, x0 + α[, f(x)6f(x0) (resp f(x)>f(x0))
• On note sup(f(x), x ∈ A) = supA(f) la borne supérieure d’une fonction définie sur A: Il s’agit d’un
élément de R. Si f est majorée sur A il s’agit d’un élément de R
• Une fonction est dite croissante (resp strictement croissante) sur A ssi∀(x, y) ∈ A2, x6y ⇒ f(x)6f(y) (resp x<y ⇒ f(x) < f(y))
Attention : le caractère continu ( non discret ) de R ne permet pas, comme pour les suites, de se ramener
6 lycée Dessaignes 2004-2005

à comparer l’image d’un élément de A avec celle de son successeur ( quel est le successeur d’un réel ....)On définit de même les fonctions décroissantes .
• Fonctions paires , impairessi A est une partie de R symétrique par rapport à 0 , une fonction f ∈ RA est dite paire ssi
∀x ∈ A, f(−x) = f(x)Elle est dite impaire ssi
∀x ∈ A, f(−x) = −f(x)La parité d’une fonction se réduit géométriquement au fait que son graphe est symétrique par rapport à
la droite x = 0 , l’imparité se traduit par le fait que le graphe est symétrique par rapport au pointO(0, 0).L’ensemble PA (resp IA) des fonctions paires sur A (resp impaires sur A) est un sous-espace vectoriel de
RA.Toute fonction f définie sur A est somme d’une fonction paire p et d’une fonction impaire i appelées
respectivement les parties paires et impaires de f
∀x ∈ A, f(x) = p(x) + i(x) avec p(x) = f(x) + f(−x)2
, i(x) =f(x)− f(−x)
2Cette écriture est unique , ce que l’on peut traduire par le fait que les deux sous espaces PA et IA sont en
somme directePA IA = RA
On peut remplacer dans ces définitions 0 par un autre réel a , ce qui revient à remplacer la fonctionx 7→ f(x) par la fonction x 7→ f(x− a)
En particulier:
• la symétrie par rapport à la droite x = a se traduit par :∀x ∈ A, f(a− x) = f(x+ a)
encore équivalentf(x) = f(2a− x)
• Un centre de symétrie en A(a, 0) se traduit par∀x ∈ A, f(a− x) = −f(x+ a)
ou encore−f(x) = f(2a− x)
• Soit T > 0. Une fonction définie sur une partie I est dite T périodique si∀x ∈ I, x+ T ∈ I et x− T ∈ I et f(x+ T ) = f(x)
On en déduit que ∀(x, k) ∈ I × Z, f(x + kT ) = f(x). La fonction f est alors définie par sa valeur surles éléments I ∩ [0, T [ grâce à la congruence modulo T.Par exemple la fonction f(x) = d(x,Z) = inf(|x− n| , n ∈ Z) qui donne la distance d’un réel x à
l’ensemble Z des entiers relatif est 1-périodique et paire. On peut reconstruire cette fonction en donnant savaleur sur l’intervalle I = [0, 0.5] :cette valeur est évidemment f(x) = x ce qui donne le graphe suivant
x 210-1-2
1
0.8
0.6
0.4
0.2
0-0.2
-0.4
7 lycée Dessaignes 2005-2006

Exercice: démontrer que f est définie sur R par f(x) = x−E(x+ 12) 2
• Une fonction est Lipchitzienne de rapport k > 0 sur l’intervalle I ssi∀(x, y) ∈ I2, |f(x)− f(y)|6k |x− y|
3.1 Etude locale d’une fonction
• Une application f de I dans R admet la limite a ∈ R lorsque x tend vers x0 ∈ R lorsque∀Va ∈ Ta, ∃Wx0 ∈ Tx0, ∀x ∈Wx0 ∩ I, f(x) ∈ Va
Notation: limx→x0
f(x) = a
Dans cette définition, si b ∈ R, Tb désigne l’ensemble des intervalles ouverts voisinages de b définiscomme suit :
b ∈ R : Tb = ]b− α, b+ α[,α > 0b = −∞ : T−∞ = ]−∞,m[,m ∈ Rb = +∞ : T+∞ = ]m,+∞[,m ∈ R
Il faut donc comprendre que la définition précédente se développe comme 9 définitions différentes. Ladéfinition pour a et x0 réels donne par exemple:
∀ε > 0,∃α > 0, ∀x ∈]x0 − α, x0 + α[∩I, f(x) ∈]a− ε, a+ ε[
ou encore en termes de valeurs absolues∀ε > 0,∃α > 0, |x− x0| < α et x ∈ I ⇒ |f(x)− a| < ε
• f est continue au point x0 ∈ R si et seulement six0 ∈ I et lim
x→x0f(x) = f(x0)
ceci se traduit par∀ε > 0,∃α > 0, |x− x0| < α et x ∈ I ⇒ |f(x)− f(x0)| < ε
α s’appelle lemodule de continuité locale en x0, il dépend bien entendu à la fois de x0 et de ε : en clairf(x) est aussi proche que l’on veut de f(x0) pourvu que x soit assez proche de x0
• f admet un prolongement par continuité en x0 si∃a ∈ R, lim
x→x0f(x) = a et x0 /∈ I
la fonction prolongée f est égale à f sur I et de plusf(x0) = a
f est alors continue en x0
• Toute fonction admettant une limite finie a en un point est bornée dans un voisinage de ce point.une fonction qui est bornée au voisinage d’un point n’admet pas forcément de limite en ce point comme
le prouve l’exemple f(x) = sin(1
x) sur ]0, 1] pour x0 = 0
• Les fonctions obéissent aux propriétés usuelles des limites (voir suites)
• Si la fonction f est continue au point x0 et si la suite (un)n∈N converge vers x0, alors la suite (vn = f(un))n∈Nconverge vers f(x0)
• Caractérisation séquentielle de la continuité:
2 Solution: poser g(x) =¯x−E(x+ 1
2)
¯. Démontrer que la fonction g est 1 périodique et vérifie:
∀x ∈ [−1/2, 1/2[, g(x) = |x| = f(x)
8 lycée Dessaignes 2004-2005

f est continue au point x0 si et seulement si pour toute suite (un)n∈N qui converge vers x0, alors la suite(vn = f(un))n∈N converge vers f(x0).Remarque: il peut être parfois utile d’utiliser cette caractérisation de la continuité pour démontrer qu’une
fonction est continue en un point.
• Théorème de la limite monotone:
Soit f une fonction croissante (resp décroissante) sur l’intervalle I =]α,β[⊂R. Alors– si f est majorée sur I (resp minorée sur I), elle admet une limite à gauche l = lim
x→β−f(x) ∈ R en β
de plusl = lim
x→β−f(x) = sup
x∈I(f(x)) respectivement l = lim
x→β−f(x)= inf
x∈I(f(x))
– sinon limx→β−
f(x) = +∞ respectivement limx→β−
f(x) = −∞
3.2 Relations de comparaisons
Soit x0 ∈ R , f et g deux fonctions définies sur un intervalle I contenant ]x0−r, x0[ou ]x0, x0+r[ ou la réuniondes deux, on définit les relations de comparaisons suivantes
• f est négligeable devant g en x0 ssi∀ε > 0,∃α > 0,∀x ∈ I − x0 , |x− x0| < α⇒ |f(x)|6ε |g(x)|
ceci se notef(x) = o
x→x0g(x)
cela revient, si g ne s’annule pas localement au voisinage de x0, à:
limx→x0x6=x0
f(x)
g(x)= 0
• f est dominée par g en x0 ssi∃A > 0,∃α > 0,∀x ∈ I − x0 , |x− x0| < α⇒ |f(x)|6A |g(x)|
ceci se notef(x) = O
x→x0g(x)
celà revient, si g ne s’annule pas localement au voisinage de x0, à dire que la fonction x 7→f(x)
g(x)est bornée
au voisinage de x0
• f est équivalente à g en x0 ssif(x)− g(x) = o
x→x0g(x)
ceci se notef(x) ∼
x→x0g(x)
cela revient, si g ne s’annule pas localement au voisinage de x0, à:
limx→x0x6=x0
f(x)
g(x)= 1
• Si f(x) ∼x0g(x) et a(x) ∼
x0b(x) alors a(x)f(x) ∼
x0b(x)g(x) et
a(x)
f(x)∼x0
b(x)
g(x)
• Si f(x) = a(x) + b(x) et b(x) =o(x0
a(x)) alors f(x) ∼x0b(x)
• Attention à ne pas ajouter les équivalents (voir suites ) , ni à tirer des conséquences sur la monotonie localed’une fonction à partir d’un équivalent.
9 lycée Dessaignes 2005-2006

• Si f(x) ∼x0g(x) et si g est positive sur un voisinage de x0 , alors f est également positive sur un certain
voisinage de x0 (qui n’est pas forcément le même )
3.3 Relations de comparaisons des fonctions usuelles en +∞
α < β ⇒ eαx = o+∞
(eβx) soit lim+∞(eαx
eβx) = 0
α ∈ R et β ∈ R+∗ ⇒ xα = o+∞
(eβx) soit lim+∞(xαe−βx) = 0
α < β ⇒ xα = o+∞
(xβ) soit lim+∞xα−β = 0
α > 0 et β ∈ R ⇒ (ln(x))β = o+∞
(xα) soit lim+∞x−α(ln(x))β = 0
α < β ⇒ xβ =o0(xα) soit lim
0xβ−α = 0
α > 0 et β ∈ R ⇒ (x)α =o0(ln(x)β) soit lim
0xα(ln(x))−β = 0
• On peut retenir de façon simple que les exponentielles dominent toujours sur les puissances et que les puis-sances dominent toujours sur le logarithme (et les puissances du logarithme) dans les problèmes de conflitsde limites du type 0×∞,Attention de bien rester dans le cadre d’application du théorème : par exemple ne pas proposer
limx→+∞
e√ln(x)
x2= +∞ !!!!
sous prétexte que l’exponentielle l’emporte sur la puissance . En effet ici
e√ln(x)
x2= exp[ ln(x)− 2 ln(x)] = exp[ ln(x)(1− 2 ln(x))] →
x→+∞0
• f admet un développement limité à l’ordre n en x0 si et seulement si il existe n + 1 réels a0, ..., an , unintervalle ]x0 − α, x0 + α[ ( ou ]x0 − α, x0[ ou ]x0, x0 + α[ ) et
∀x ∈]x0 − α, x0 + α[, f(x) =n
k=0
ak(x− x0)k+ ox→x0
(x− x0)n
• Fonction x→ 1
1− x au voisinage de x = 0
1
1− u =n
k=0
uk+ ou→0
(un)
1
1 + u=
n
k=0
(−1)kuk+ ou→0
(un)
3.4 Fonction continue sur un intervalle
• Une fonction f définie sur l’intervalle I est continue sur I ssi elle est continue en tous les points de I (continuité à droite ou à gauche s’il s’agit d’une extrémité de I qui appartient à I)
• L’image d’un intervalle I par une fonction f continue sur I est un intervalle J = f(I)
• L’image d’un intervalle fermé borné I = [a, b] par une fonction continue sur I est l’intervalle fermé f(I) =[α,β] : ceci revient à dire que la fonction f est bornée et atteint ses bornes supérieures et inférieures surle compact [a, b]
• Si f est continue et strictement croissante sur l’intervalle I =]a, b[ , alorsJ = f(I) =] lim
x→a+f(x), lim
x→b−f(x)[
et f réalise une bijection de I dans f(I):
10 lycée Dessaignes 2004-2005

De plus la bijection réciproque f−1 de f est elle même continue sur J et demêmemonotonie que f : songraphe dans le p^lan rapporté à un repère orthonormé est obtenu par la symétrie orthogonale par rapportà la première bissectrice appliquée au graphe de f.On a un énoncé analogue si f est strictement décroissante
• Une fonction f définie sur I à valeur dans R est uniformément continue sur I ssi∀ε > 0,∃α > 0,∀(x, y) ∈ I2, |x− y| < α⇒ |f(x)− f(y)| < ε
ceci revient à dire que non seulement f est continue en tout point de I , mais que de plus le module decontinuité locale de f en chaque point de I ne dépend que de ε.Par exemple la fonction x 7→√x est uniformément continue sur [0,+∞[En effet supposons 06y6x et |x− y| < α. On a donc
– ou bien 06x6α dans ce cas √x−√y 6√x6√α– ou bien α < x et dans ce cas
√x−√y = |x− y|√
x+√y6 |x− y|√
x6 α√
α=√α
Il suffit donc de choisir α = ε2 qui est donc un module de continuité uniforme sur [0,+∞[ pour cettefonction.
• Théorème de Heine : Toute fonction continue sur un compact y est uniformément continue
4 Nombres complexes
4.1 Corps des nombres complexes
• C = a+ ib, (a, b) ∈ R2 est un corps commutatif ,dont R est un sous-corps , lorsqu’il est muni des deuxlois de composition internes:
(a+ ib) + (c+ id) = a+ b+ i(b+ d)
(a+ ib)× (c+ id) = ac− bd+ i(ad+ bc)l’élément i vérifie i2 = −1
Pour z = a+ ib ∈ C, a = Re(z) et b = Im(z)sont les parties réelles et imaginaires de z.
• Pour z = a+ ib ∈ C , z = a− ib est le conjugué de z
• Si l’on introduit la loi de composition externe : (λ, z) ∈ R×C → λ.z ∈ C , C devient une R algèbre dedimension 2 sur le corps R des nombres réels, dont une base est par exemple (1, i).
• |z| désigne lemodule de zPour z = a+ ib ∈ C, |z| =
√a2 + b2>0
|zz0| = |z| |z0| ; si z0 6= 0 z
z0=|z||z0|
max(|Re(z)| , |Im(z)|) ≤ |z| ≤ |Re(z)|+ |Im(z)|
• Inégalité triangulaire∀(z, z0) ∈ C2, ||z|− |z0||6 |z + z0|6 |z|+ |z0|
Cette inégalité s’interprète en terme de distance : en effet si A,B,C sont trois points du plan d’affixesrespectifs a, b, c, en prenant z = b− a et z0 = c− b, on a donc z + z0 = c− a et l’inégalité triangulaire setraduit par
|AB −BC|6AC6AB +BC
11 lycée Dessaignes 2005-2006

cas d’égalité : |z + z0|= |z|+|z0| se produit si et seulement si les deux complexes z, z0 sont proportionnelsdans un rapport positif ce qui signifie qu’il existe λ ∈ R+ tel que z0 = λz ou z = 0
• On note U = z ∈ C, |z| = 1 l’ensemble des nombres complexes de module 1.Noter que ∀z ∈ C∗, z|z| ∈ U, ce qui signifie que tout nombre complexe non nul est proportionnel dans
un rapport positif à un et un seul élément de U. (U,×) est un sous groupe du groupe multiplicatif (C∗,×)
• Notation d’Euler∀θ ∈ R on pose eiθ = cos(θ) + i sin(θ)eiθ = 1
cos θ =eiθ + e−iθ
2, sin θ =
eiθ − e−iθ2i
∀z ∈ U, ∃!θ ∈ [0, 2π[, z = eiθ
∀(θ, θ0) ∈ R2, eiθ = eiθ0 ⇔ θ − θ0 ≡ 0mod(2π)
∀(θ, θ0) ∈ R2, eiθ × eiθ0 = ei(θ+θ0)
Ainsi l’application Φ : R → Uθ 7→ eiθ
est un morphisme surjectif de (R+) dans (U,×) dont le noyauest égal à 2πZ
• Formule de Moivre∀θ ∈ R,∀n ∈ Z, (cos θ + i sin θ)n = cos(nθ) + i sin(nθ)
On en déduit en particulier l’expression de cos(nθ) et sin(nθ) en fonction des puissances de cos(θ) enutilisant la formule du binôme de Newton
cos(nθ) =
E(n/2)
k=0
n2k
(−1)k cosn−2k(θ)(1− cos2(θ))k = Tn(cos(θ))
sin(nθ) = sin(θ)
E((n−1)/2
k=0
n2k + 1
(−1)k cosn−2k−1(θ)(1− cos2(θ))k
Tn est le nieme polynôme de Tchebichev
On en déduit également la linéarisation de cosn(θ) et sinn(θ) en développant (eiθ + e−iθ
2)n à l’aide du
binôme de Newton et en regroupant deux par deux les termes de la somme obtenue
cosn(θ) =1
2n
n
k=0
nk
cos((2k − n)θ)
• argument d’un nombre complexe non nul∀z ∈ C∗, ∃!θ ∈ [0, 2π[, z = |z| eiθ
θ est appelé détermination principale de l’argument de zarg(zz0) ≡ arg(z) + arg(z0)mod(2π)
• Racine nieme de l’unité
∀n ∈ N∗, zn = 1⇔ ∃k ∈ 0, 1, .., n− 1 , z = e2ikπ
n
L’ensemble Un des racines niemes de l’unité dans C est un groupe multiplicatif de cardinal n , engendrépar z1 = e
2iπn :
Un = 1, z1, z21 , ..., z
n−11 avec z1 = e
2iπn
• Racine nieme d’un complexe a = ρeiθ
∀n ∈ N∗, zn = ρeiθ ⇔ ∃k ∈ 0, 1, .., n− 1 , z = ρ1/nei(θ+2kπn
)
Les images dans le plan des racines niemes de a forment un polygône régulier à n sommets, distribués sur
12 lycée Dessaignes 2004-2005

le cercle de centre O et de rayon |a|1/n . Pour les obtenir toutes , il suffit de multiplier l’une d’entre elles partous les éléments de Un.
4.2 Exponentielle complexe
• Exponentielle complexe∀z ∈ C, ez = eRe(z)ei Im(z)
si z = x+ iy alors ex+iy = ex(cos(y) + i sin(y))|ez| = ex et arg(ez) = y
En particulier ∀(z, z0) ∈ C2, ezez0 = ez+z0: l’exponentielle réalise un morphisme de groupe surjectif de(C,+) dans (C∗,×) , dont le noyau est 2iπZ. Ceci signifie que
ez = 1⇔ ∃k ∈ Z, z = 2ikπ
• Equation ez = aez = a = |a| ei arg(a) ⇔ z = ln(|a|) + i arg(a) + 2ikπ avec k quelconque dans Z
4.3 Les complexes en géométrie plane
• u ∈ C : l’application z 7→ z + u s’interprète comme la translation de vecteur −→u où−→u admet u pour affixe
• θ ∈ R : l’application z 7→ eiθz s’interprète comme la rotation d’angle θ et de centre 0
• λ ∈ R : l’application z 7→ λz s’interprète comme l’homothétie de centre 0 et de rapport λ
• l’application z → λeiθ(z − z0) + z0 s’interprète comme la similitude directe de centre A d’affixe z0, derapport λ et d’angle θ.
• Soient A,B,M trois points du plan d’affixe respectifs a, b, z: on az − az − b =
MA
MBet arg(
z − az − b ) =
\(−−→MB−−−→,MA)
• Les quatres points A,B,C,D sont cocycliques ou alignés ssi
arg(c− ac− b ) = arg(
d− ad− b )mod π
A,B,C,D sont cocycliques ou alignés ⇔ (c− a)(d− b)(c− b)(d− a) ∈ R
4.4 Trigonométrie
•cos(x+ y) = cos(x) cos(y)− sin(x) sin(y)cos(x− y) = cos(x) cos(y) + sin(x) sin(y)
sin(x+ y) = sin(x) cos(y) + sin(y) cos(x)
sin(x− y) = sin(x) cos(y)− sin(y) cos(x)
•cos(p) + cos(q) = 2 cos(
p+ q
2) cos(
p− q2)
cos(p)− cos(q) = −2 sin(p+ q2) sin(
p− q2)
sin(p) + sin(q) = 2 sin(p+ q
2) cos(
p− q2)
13 lycée Dessaignes 2005-2006

sin(p)− sin(q) = 2 sin(p− q2) cos(
p+ q
2)
•cos(a) cos(b) =
cos(a+ b) + cos(a− b)2
sin(a) sin(b) =cos(a− b)− cos(a+ b)
2
sin(a) cos(b) =sin(a+ b) + sin(a− b)
2•
tan(x+ y) =tan(x) + tan(y)
1− tan(x) tan(y)
tan(x− y) =tan(x)− tan(y)1 + tan(x) tan(y)
•cos(2θ) = cos2(θ)− sin2(θ) = 2 cos2(θ)− 1 = 1− 2 sin2(θ)
sin(2θ) = 2 sin(θ) cos(θ)
tan(2θ) =2 tan(θ)
1− tan2(θ)•
1 + cos(θ) = 2 cos2(θ
2) 1− cos(θ) = 2 sin2(θ
2)
•eiθ + eiθ
0= 2 cos(
θ − θ0
2)ei
θ+θ02 1 + eiθ = 2 cos(
θ
2)ei
θ2
cette formule s’interprète comme la somme de deux vecteurs unitaires , formant ainsi la diagonale d’unlosange qui est aussi sa bissectrice intérieure.
• arc moitié
cos(θ) =1− t21 + t2
, sin(θ) =2t
1 + t2, tan(θ) =
2t
1− t2 avec t = tan(θ
2)
5 Calcul différentiel
5.1 Dérivée en un point, fonction dérivée
• La fonction f : I → R étant définie sur un voisinage de x0 est dérivable en x0 si et seulement si
∃l ∈ R, limh→0
f(x0 + h)− f(x0)h
= l = limx→x0
f(x)− f(x0)x− x0
Définition équivalente (développement limité d’ordre 1)∃l ∈ R ,∀x ∈ I, f(x) = f(x0) + l(x− x0)+ o
x→x0(x− x0)
l est le nombre dérivé de f en x0 , noté f 0(x0)Toute fonction qui est dérivable au point x0 est continue en x0La réciproque est fausse comme le prouve l’exemple de la fonction x→ |x| en x0 = 0
• f est dérivable sur l’intervalle I si elle l’est en tout point de I , et à droite ou à gauche en ses éventuellesextrémités si I est ferméf 0 : x ∈ I 7→ f 0(x) est alors appelée la fonction dérivée de f
14 lycée Dessaignes 2004-2005

• Si f est dérivable sur l’intervalle I et admet en un point x0 intérieur à I un extrémum local , alors f 0(x0) = 0la réciproque est fausse comme le montre le contre exemple x 7→ f(x) = x3 en 0D’autre part l’énoncé de ce théorème suppose que x0 est intérieur à I , et ceci est un point fondamental
, pensez à la fonction x→ x sur I = [0, 1] qui admet son maximum en 1
• Composée : si f est dérivable en x0 et g l’est en f(x0) alors gof est dérivable en x0 et(gof)0(x0) = f 0(x0)× g0(f(x0))
• Si f est dérivable sur I , de dérivée continue en x0 et si f 0(x0) 6= 0 alors f est localement bijective d’unvoisinage de x0 sur un voisinage de y0 = f(x0) et sa bijection réciproque f−1 est dérivable en y0 : de plus
(f−1)0(y0) =1
f 0(x0)On peut retenir aussi la formule sous la forme
(f−1)0 =1
f 0of−1
• Opérations(f + g)0 = f 0 + g0 (fg)0 = f 0g + fg0
(f
g)0 =
f 0g − fg0g2
(1
f)0 =
−f 0f2
(√f)0 =
f 0
2√f
(exp(f))0 = f 0 exp(f) (fα)0 = αf 0fα−1
ln(|f |)0 = f 0
f(sin(f))0 = f 0 cos(f), (cos(f))0 = −f 0 sin(f)
• Dérivées d’ordre supérieurf est k fois dérivable sur l’intervalle I ssi elle est k − 1 fois dérivable sur I et si la fonction f (k−1) est
dérivable sur I : On pose alorsf (k) = (f (k−1))0
• f est de classe Ck sur I si elle est k fois dérivable sur I et si sa dérivée f (k) est continue sur I .On introduit ainsi un opérateurD dit opérateur de dérivation sur l’ensemble des fonctions k fois dériv-
ables à valeurs dans l’ensemble des fonctions k − 1 fois dérivables sur I . Cet opérateur est défini parD(f) = f 0. On note Dk (lire D puissance k) l’opérateur DoDoD...oD , k fois , et l’on a ainsi:
Dk(f) = f (k)
En particulier DioDj(f) = DjoDi(f) = Di+j(f) pour toute fonction de classe Ci+j sur I
• L’opérateur D ainsi que tous les opérateurs Dk sont linéaires
• Formule de Leibniz: si f et g sont de classe Ck sur I , fg l’est également et
Dn(fg) =n
k=0
nk
Dk(f)Dn−k(g)
• Complément sur la dérivée d’ordre n d’une composée : et pourquoi bon dieu ne parle t’on jamais de ladérivée niemede la composée de deux fonctions de classe Cn, il doit bien y avoir une formule ...oui la voici
Dn(gof)(x) =n!
m1!m2!..mq!Dp(g)of(x)
D(f)(x)
1!
m1 D2(f)(x)
2!
m2
...Dqf(x)
q!
mq
où cette somme est étendue à toutes les suites d’entiers positifs (mi)1≤i≤q vérifiantm1 + 2m2 + ..+ qmq = n
et où p désigne la sommem1 +m2 + ..+mq = p
par exemple si n = 2 , 2 = 1 × 0 + 2 × 1 = 1 × 2 + 2 × 0 donne les deux suites m1 = 2,m2 = 0 etm1 = 0,m2 = 1 d’où :
(gof)”(x) =2!
0!1!g0(f(x))
f”(x)
2!+2!
2!0!g”(f(x))(f 0(x))2
15 lycée Dessaignes 2005-2006

On comprendra que l’on évite d’en parler....Exercice3 : calculer (gof)(3)(x) et vérifier que la formule est vraie pour n = 3
5.2 Etude globale des fonctions dérivables
• Théorème de RolleSi f est continue sur [a, b] et dérivable sur ]a, b[ , et si f(a) = f(b) alors il existe un point c ∈]a, b[ tel que
f 0(c) = 0
• Théorème des accroissements finisSi f est continue sur [a, b] et dérivable sur ]a, b[ , alors il existe un point c ∈]a, b[ tel que f 0(c) =
f(b)− f(a)b− a
• Inégalité des accroissements finisSi f est continue sur [a, b] dérivable sur ]a, b[ et si sa dérivée est bornée , alors
|f(b)− f(a)|6 |b− a| supx∈]a,b[
(|f 0(x)|)
en notant k = supx∈]a,b[
(|f 0(x)|) ceci revient à dire que f est k lipchitzienne sur [a, b]
• Théorème de prolongement de la dérivéeSi f est continue sur [a, b], dérivable sur ]a, b[, et si f 0 admet une limite finie l à droite au point a , alors
f est de classe C1 sur [a, b[ et f 0(a) = lIl faut cependant faire très attention car le comportement de la dérivée peut être divergent au point a
bien que la fonction f soit dérivable en a . L’exemple le plus simple est la fonction f(x) = x2 sin(1/x) (prolongée par continuité en 0) qui est dérivable sur R : f 0(x) = 2x sin 1
x− cos 1
xsi x 6= 0 et f 0(0) = 0, et
cependant limx→0
f 0(x) n’existe pas
x 0.40.20-0.2-0.4
0.4
0.2
0
-0.2
-0.4
x→ x2 sin(1/x) sur [−0.5, 0.5]
x 0.10.050-0.05-0.1
0.01
0.005
0
-0.005
-0.01
Zoom sur [−0.1, 0.1]Un théorème qui énonce des conditions suffisantes ( et pas forcément nécessaires : en français courant
’’ca suffit mais ce n’est pas obligatoire’’) pour qu’une propriété soit vérifiée doit être analysé d’autant plussoigneusement afin d’éviter de confondre le nécessaire et le suffisant. Travailler sur le nécessaire et lesuffisant par rapport à une propriété , c’est la situer dans le contexte de la logique mathématique un peucomme on situerait un nombre sur une droite.
5.3 Fonctions convexes
• La fonction f : I → R est convexe sur l’intervalle I ssi l’une des propriétés équivalentes suivantes estvérifiée:
3 (gof)(3)(x) = g(3)(f(x))(f 0(x))3 + 3g(2)(f(x))f 0(x)f (2)(x) + g0(f(x))f (3)(x)obtenue avec les triplets(m1,m2,m3) = (0, 0, 1), (1, 1, 0), (3, 0, 0)
16 lycée Dessaignes 2004-2005

a) ∀(x, y) ∈ I2,∀λ ∈ [0, 1], f(λx+ (1− λ)y)6λf(x) + (1− λ)f(y)
b) ∀n>2,∀(λ1, ...,λn) ∈ (R+)n,∀((x1, .., xn) ∈ In,ni=1 λi = 1⇒ f( n
i=1 λixi)6ni=1 λif(xi)
c) ∀a ∈ I, l’application ta : x→ ta(x) =f(x)− f(a)x− a est croissante sur I − a
d) ∀(x, y, z) ∈ I3, x < y < z ⇒ f(y)− f(x)y − x 6f(z)− f(x)
z − x 6f(z)− f(y)z − y
e) la partie A = (x, y) ∈ R2, x ∈ I, y>f(x) est une partie convexe du plan R2
• D’un point de vue géométrique la convexité d’une fonction sur un intervalle I se traduit par le fait que pourtout couple de points A,B du graphe de f , l’arc de courbe
_
AB est situé au dessous de la corde AB
• Si la fonction f est de classe C1 sur I alorsf est convexe sur I ⇔ f 0 est croissante sur I
Dans ce cas ,le point de vue géométrique se traduit par le fait que pour tout point A du graphe de f , l’arcde courbe
_
AB est situé au dessus de la tangente en A au graphe de f soit∀a ∈ I,∀x ∈ I, f 0(a)(x− a) + f(a)6f(x)
• Inégalités de convexités pour les fonctions usuelles∀x ∈ R∗+, ln(x)6x− 1∀u ∈ ]−1,+∞[, ln(1 + u)6u∀x ∈ R, 1 + x6ex
∀x ∈ ]− 1,+∞[,√1 + x ≤ 1 + x
2Exercice : Démontrer l’inégalité 4
∀x ∈ [0,π/4], x ≤ tan(x) ≤ 4xπ
6 Intégration sur un segment des fonctions à valeurs réelles
6.1 Fonctions continues par morceaux
• Une fonction f ∈R[a,b] est dite en escalier sur [a, b] ssi il existe une subdivision a0 = a < a1 < .. < an = bde [a, b] telle que pour tout i ∈ 1, .., n , la restriction de f à l’intervalle ouvert ]ai−1, ai[ soit constante : onnotera λi = f(x) la valeur de la fonction f sur ]ai−1, ai[. L’ensembleEsc([a, b],R) des fonctions en escaliersur I est un sous espace vectoriel de R[a,b]Si f est en escalier sur la subdivision (a0, a1, ..., an) on note
b
a
f =n
i=1
(ai − ai−1)λi
L’application f → b
af est une forme linéaire sur Esc([a, b],R)
• Une fonction f définie sur I = [a, b] est continue par morceaux sur I s’il existe une subdivision a0 = a <a1 < .. < an = b de I telle que f soit continue sur chacun des intervalles ouverts ]ai, ai+1[ de la subdivision, et admette une limite finie à gauche et à droite en chacun des points de la subdivision
4 la fonction x → tan(x) vérifie tan ”(x) =2 sin(x)
cos3(x)qui est positif sur l’intervalle [0,π/4]. Elle y est donc convexe or la
pente de tangente en 0 est 1 = tan0(0) et la corde a pour équation y =4x
π
17 lycée Dessaignes 2005-2006

La condition d’existence d’une limite peut aussi s’énoncer comme suit : la restriction de f à chacun des in-tervalles ouverts ]ai, ai+1[ admet un prolongement par continuité sur le fermé [ai, ai+1].On noteC0m([a, b],R)l’ensemble des fonctions continues par morceaux sur [a, b]: c’est un sous espace vectoriel de R[a,b]
• Approximation uniforme d’une fonction de C0m([a, b],R) par une fonction en escalierSoit f une fonction continue par morceaux sur [a, b] , il est possible de l’encadrer par deux fonctions en
escalier dont la différence n’excède pas une valeur ε fixée arbitrairement∀ε > 0, ∃(ϕ,ψ) ∈ Esc([a, b],R)2, ∀x ∈ [a, b], ϕ(x)6f(x)6ψ(x) et ψ(x)− ϕ(x)6ε
On peut également formuler cela à l’aide d’une borne supérieure:∀ε > 0, ∃ϕ ∈ Esc([a, b],R), sup
x∈[a,b](|f(x)− ϕ(x)|) ≤ ε
6.2 Intégrale d’une fonction continue par morceaux
• Il existe une application , appelée intégrale au sens de Riemman , définie sur C0m([a, b],R) à valeurs dans Ret notée b
a: f → b
af telle que
– l’application b
aest linéaire
– ∀f ∈ Esc([a, b],R) , b
af = n
i=1(ai − ai−1)λiOn note également b
af(t)dt , ou
[a,b]f
• On a les propriétés suivantesf>0 ⇒ b
af>0
f6g ⇒ b
af6 b
ag
b
af 6 b
a|f |
∀c ∈ [a, b], b
af =
c
af +
b
cf
• Valeur moyenne d’une fonction : Lorsque la fonction f est continue par morceaux sur [a, b] , si l’on prendla moyenne arithmétique
Mn =1
n+ 1
n
i=0
f(an,i)
des valeurs de la fonction f aux n+ 1 points
an,0 = a, an,k = a+ kb− an, ..., an,n = b
régulièrement distribués sur [a, b] , alors cette moyenne tend, lorsque n tend vers∞, vers la valeur moyennede f sur [a, b]
1
b− ab
a
f
• Inégalités de la moyenneb
a
f 6(b− a) supI|f |
b
a
fg 6 sup[a,b]
|f |b
a
|g|
• L’intégrale comme produit scalaireSi f est continue sur [a, b] et positive , alors b
af = 0⇒ f = 0
On définit sur C0([a, b],R) la forme bilinéaire symétrique , définie positive
(f | g) =b
a
fg
18 lycée Dessaignes 2004-2005

C’est le produit scalaire canonique sur C0([a, b],R)La norme associée , appelée norme N2 est définie par
N2(f) =b
a
f2
• Inégalité de Cauchy-Schwarz
∀(f, g) ∈ C0([a, b],R)2,b
a
fg 6b
a
f2b
a
g2 ou encore |(f | g)|6N2(f)N2(g)
Il y a égalité dans cette inégalité ssi les deux fonctions f et g sont proportionnelles
• Somme de RiemmanSi f est continue sur [a, b] , et si (σn = (ai,n)06i6n)n∈N∗ est une suite de subdivisions de [a, b] telles que
le pas πn = max16i6n
(ai,n − ai−1,n) de σn tende vers 0 lorsque n → ∞ alors pour toute suite (xi,n) telle que∀n ∈ N∗,∀i ∈ 1, .n , xi,n ∈ [ai−1,n, ai,n], on a
limn→∞
n
i=1
(ai,n − ai−1,n)f(xi,n) =b
a
f
ni=1(ai,n−ai−1,n)f(xi,n) est appelée sommedeRiemann de f pour la ’’subdivision pointée’’ (ai,n, xi,n)06i6n
• Somme de Riemman équirépartie
∀f ∈ C0([a, b],R), limn→∞
b− an
n
k=1
f(a+ k b−an) =
b
a
f
Cette formule est aussi connue sous le nom de formule des rectangles , on montre queb− an
n
k=1
f(a+ k b−an)−
b
a
f = O(1
n)
• Formule des trapèzessi f est continue sur [a, b] , en notant ak = a+ k
b− an
, la méthode des trapèzes consiste à approximer lafonction f par la fonction g affine par morceaux sur la subdivision (ak)06k6n, valant f(ak) en ak pour toutentier k
In(f) =b
a
g(t)dt =b− a2n
n
k=1
[f(ak−1) + f(ak)]
On obtient lorsque f est de classe C2
In(f)−b
a
f = O(1
n2)
• Onpeut affiner l’approximation en utilisant une fonction g dont la formule sur chacun des segments [ak, ak+1]est le polynôme de degré 2 qui vérifie
g(ak) = f(ak), g(ak + ak+1
2) = f(
ak + ak+12
), g(ak+1) = f(ak+1)
La formule des trois niveaux donne alorsak+1
ak
g(t)dt =f(ak) + 4f(
ak + ak+12
) + f(ak+1)
6
puis en sommant, on obtient la formule de Simson :
Jn(f) =b− a6n
n
k=1
(f(ak−1) + 4f(ak−1 + ak
2) + f(ak))
19 lycée Dessaignes 2005-2006

On démontre que lorsque f est de classe C3
Jn(f)−b
a
f = O(1
n3)
Exercice: sur un logiciel de calcul , programmez la formule des rectangles, la formule des trapèzes et laformule de Simson, pour la fonction f(x) = sin(x) sur [a, b] = [0, 1] et n = 10 . Validez les inégalités enmesurant l’erreur. 5
6.3 Intégration et dérivation
• Soit f ∈ C0(I,C). F est une primitive de f sur l0intervalle I si et seulement si F est dérivable sur I et siF 0 = f .
• Deux primitives de f sur l’intervalle I diffèrent d’une constante.
• Soit f ∈ C0(I,C) et a ∈ I : Alors l’unique primitive de f qui s’annule en a est la fonction
F (x) =x
a
f(t)dt
En particulier∂
∂x(
x
a
f(t)dt) = f(x)
∂
∂x(
v(x)
u(x)
f(t)dt) = v0(x)f(v(x))− u0(x)f(u(x))
• Si F est une primitive de f sur I alorsb
a
f(t)dt = F (b)− F (a) = [F (x)]ba
• Intégration par partiesSi f est de classe C1 ainsi que g sur [a, b]
b
a
f(t)g0(t)dt = [f(x)g(x)]ba −b
a
f 0(t)g(t)dt
• Changement de variableSi f est continue sur I et si ϕ est de classe C1 sur [α,β] à valeurs dans I , alors
ϕ(β)
ϕ(α)
f(t)dt =β
α
ϕ0(u).foϕ(u)du
6.4 Formules de Taylor
• Formule de Taylor-YoungSoit f une fonction de classe Cn+1 sur un intervalle I ouvert contenant a : On a
∀x ∈ I, f(x) = f(a) +n
k=1
(x− a)kk!
Dk(f)(a)+ o(x− a)nx→a
• Formule de Taylor avec reste sous forme d’une intégraleSoit f une fonction de classe Cn+1 sur un intervalle I ouvert contenant a : On a
∀x ∈ I, f(x) = f(a) +n
k=1
(x− a)kk!
Dk(f)(a) +1
n!
x
a
(x− t)nDn+1(f)(t)dt
5 Erreurs: rectangles 0.04; trapèzes 0.00038, Simson 0.000000016
20 lycée Dessaignes 2004-2005
• Inégalité de Taylor-LagrangeSoit f une fonction de classe Cn+1 sur un intervalle I ouvert contenant a et b : On a
f(b)− f(a)−n
k=1
(b− a)kk!
Dk(f)(a) 6 |b− a|n+1
(n+ 1)!maxt∈[a,b]
( Dn+1(f)(t)
6.5 Etude des fonctions usuelles
6.5.1 Fonctions exponentielles, logarithmes, puissances
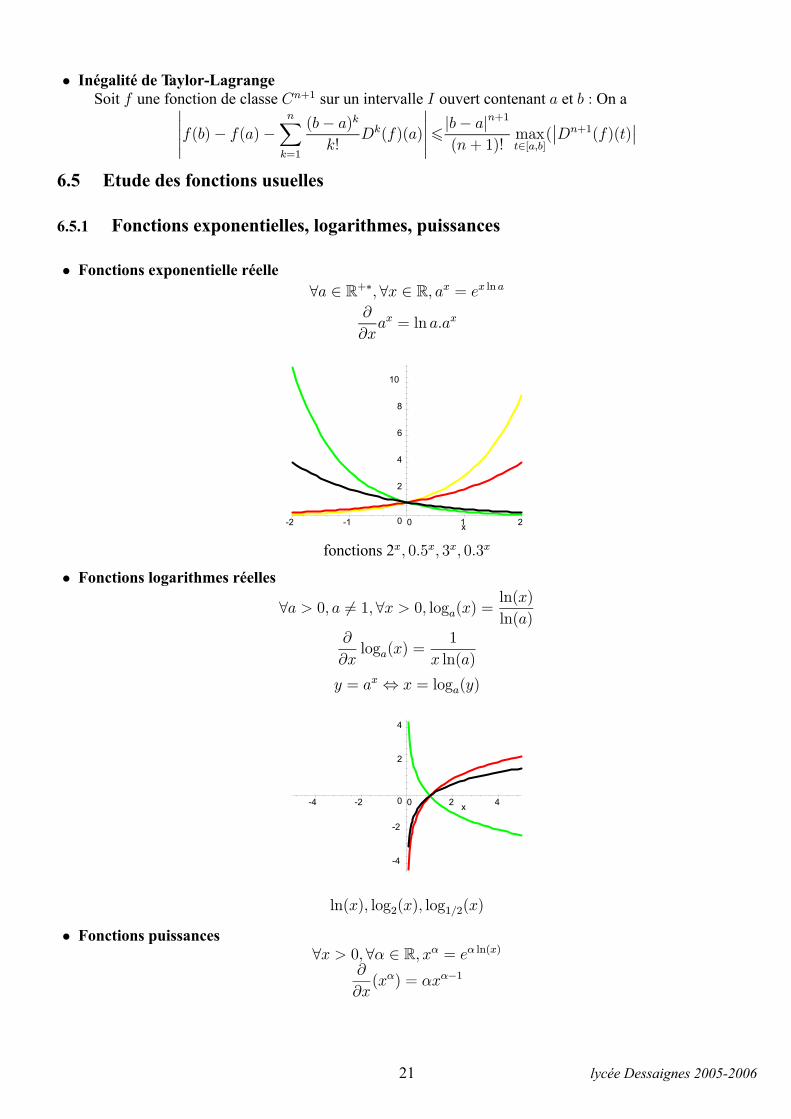
• Fonctions exponentielle réelle∀a ∈ R+∗,∀x ∈ R, ax = ex ln a
∂
∂xax = ln a.ax
x 210-1-2
10
8
6
4
2
0
fonctions 2x, 0.5x, 3x, 0.3x
• Fonctions logarithmes réelles
∀a > 0, a 6= 1,∀x > 0, loga(x) =ln(x)
ln(a)∂
∂xloga(x) =
1
x ln(a)
y = ax ⇔ x = loga(y)
x 420-2-4
4
2
0
-2
-4
ln(x), log2(x), log1/2(x)
• Fonctions puissances∀x > 0,∀α ∈ R, xα = eα ln(x)
∂
∂x(xα) = αxα−1
21 lycée Dessaignes 2005-2006
x 543210
5
4
3
2
1
0
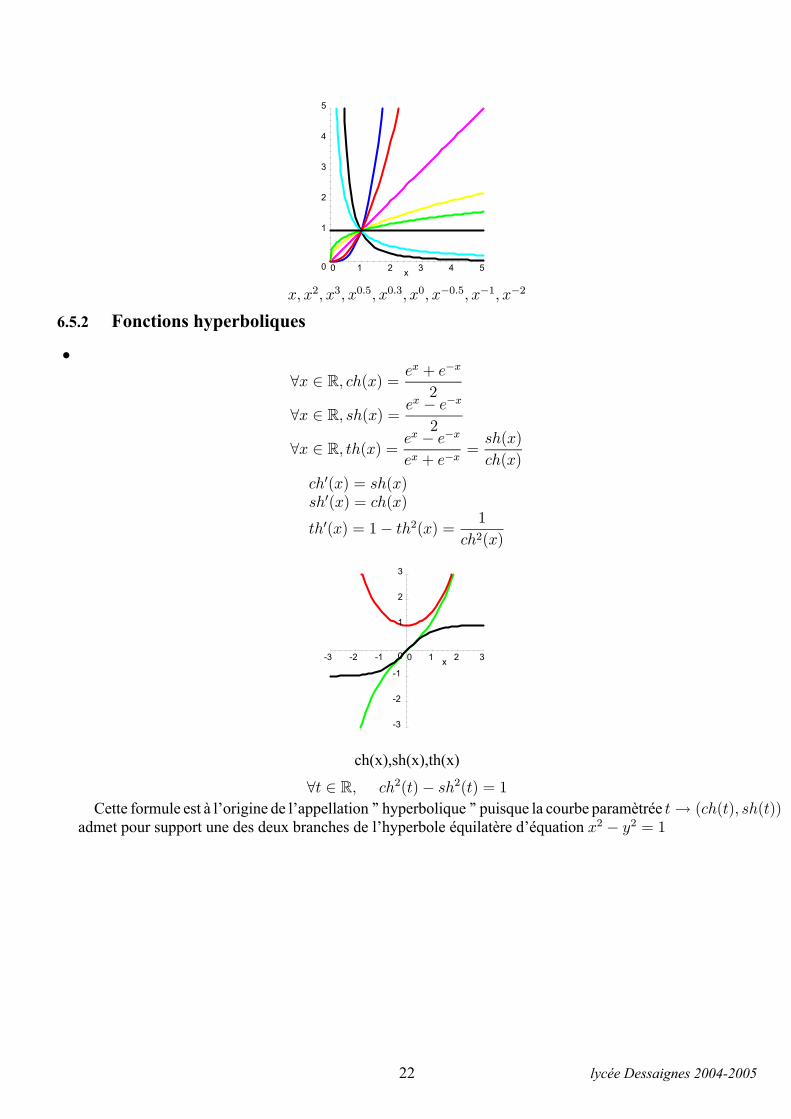
x, x2, x3, x0.5, x0.3, x0, x−0.5, x−1, x−2
6.5.2 Fonctions hyperboliques
•∀x ∈ R, ch(x) = ex + e−x
2
∀x ∈ R, sh(x) = ex − e−x2
∀x ∈ R, th(x) = ex − e−xex + e−x
=sh(x)
ch(x)
ch0(x) = sh(x)sh0(x) = ch(x)
th0(x) = 1− th2(x) = 1
ch2(x)
x 3210-1-2-3
3
2
1
0
-1
-2
-3
ch(x),sh(x),th(x)
∀t ∈ R, ch2(t)− sh2(t) = 1Cette formule est à l’origine de l’appellation ’’ hyperbolique ’’ puisque la courbe paramètrée t→ (ch(t), sh(t))
admet pour support une des deux branches de l’hyperbole équilatère d’équation x2 − y2 = 1
22 lycée Dessaignes 2004-2005

32.521.510.50
3
2
1
0
-1
-2
-3
x=ch(t),y=sh(t): branche d hyperbole
6.5.3 Fonctions circulaires
• sin,cos,tan
cos(x) = Re(eix), sin(x) = Im(eix), tan(x) =sin(x)
cos(x)
cos2(x) + sin2(x) = 1c’est le paramètrage du cercle de centre 0 et de rayon 1 qui est à l’origine de la dénomination circulaire
∂
∂x(cos(x)) = − sin(x), ∂
∂x(sin(x)) = cos(x)
∂
∂x(tan(x)) = 1 + tan2(x) =
1
cos2(x)
x420-2-4
10.5
0-0.5-1
cos(x): R→ [−1, 1]
x420-2-4
10.5
0-0.5-1
sin(x):R→ [−1, 1]
x 3210-1-2-3
3
2
1
0
-1
-2
-3
tan(x): R− π
2+ kπ → R
• La fonction cos établit une bijection de [0,π] dans [−1, 1] , la bijection réciproque est notée arccos
23 lycée Dessaignes 2005-2006

x 10.50-0.5-1
3
2.5
2
1.5
1
0.5
0
arccos(x): [−1, 1]→ [0,π]
∂
∂x(arccos(x)) =
−1√1− x2
∀x ∈ [−1, 1], cos(arccos(x)) = x
∀x ∈ [0,π], arccos(cos(x)) = x
Remarque:∀x ∈ [π, 2π], arccos(cos(x)) = 2π − x,∀x ∈ [2π, 3π], arccos(cos(x)) = x− 2π
• La fonction sin établit une bijection de [−π/2,π/2] dans [−1, 1] , la bijection réciproque est notée arcsin
x 10.50-0.5-1
1
0.5
0
-0.5
-1
arcsin(x): [−1, 1]→ [−π
2,−π
2]
∂
∂x(arcsin(x)) =
1√1− x2
∀x ∈ [−1, 1], sin(arcsin(x)) = x
∀x ∈ [−π/2,π/2], arcsin(sin(x)) = x
• La fonction tan établit une bijection de ] − π/2,π/2[ dans ] −∞,+∞[ , la bijection réciproque est notéearctan
∂
∂x(arctan(x)) =
1
1 + x2
∀x ∈ R, tan(arctan(x)) = x
∀k ∈ Z,∀x ∈]− π/2 + kπ,π/2 + kπ[, arctan(tan(x)) = x− kπ
∀x ∈ R∗, arctan(x) + arctan(1x) = signe(x)
π
2
24 lycée Dessaignes 2004-2005

x420-2-4
1.51
0.5
0-0.5-1
-1.5
x→ arctan(x)
6.5.4 Fonction exponentielle complexe
• a = x + iy est un complexe et t ∈ R. On rappelle que exp(at) = ext(cos(yt) + i sin(yt)). Soit ϕ unefonction dérivable définie sur une partie de R à valeurs dans C: ϕ(t) = Re(ϕ(t)) + i Im(ϕ(t). On a alorsles deux formules
∀a ∈ C, ∂∂teat = aeat
∂∂teϕ(t) = ϕ0(t)eϕ(t)
6.6 Primitives des fonctions usuelles
• le symbole désigne l’ensemble des primitives de la fonction considéréeOn a précisé sur quels intervalles ces formules sont valables.
∀a ∈ C,∀n ∈ Z− −1 , (t− a)ndt = (t− a)n+1n+ 1
+ C R− a si n < 0 et R si n ≥ 01
tdt = ln(|t|) + C ]0,+∞[ et ]−∞, 0[
cos(t)dt = sin t+ C R
tan(t)dt = − ln |cos(t)|+ C R− π/2 + kπ
P = polynome et a ∈ C∗ : eatP (t)dt = eatQ(t) + C R deg P=deg Q1
1 + t2dt = arctan(t) + C R
a ∈ R∗+ :1
a2 + t2dt =
1
aarctan(
t
a) + C R
1
sin tdt = ln( tan(
x
2) ) + C R− kπ
25 lycée Dessaignes 2005-2006

ch(t)dt = sh(t) + C R1
1− t2dt =1
2ln(
1 + t
1− t ) + C R− −1, 1
α ∈ R, α 6= −1, tαdt =tα+1
α+ 1+ C ]0,+∞[
ln(t)dt = t ln(t)− t+ C ]0,+∞[
sin(t)dt = − cos(t) + C R
eatdt =eat
a+ C R
1√1− t2
dt = arcsin(t) + C ]− 1, 1[1
cos(t)dt = ln( tan(
x
2+
π
4) ) + C R− π/2 + kπ
sh(t)dt = ch(t) + C R
th(t)dt = ln(|ch(t)|) + C R
6.7 Développements limités des fonctions usuelles
• Les développements suivants sont au voisinage de 0
f(x0 + t) = f(x0) +n
k=1f (k)(x0)
tk
k!+ ot→0(tn)
eat =n
k=0aktk
k!+ ot→0(tn)
sin(t) =n
k=0(−1)k t2k+1
(2k + 1)!+ ot→0(t2n+2)
cos(t) =n
k=0(−1)k t
2k
(2k)!+ ot→0(t2n+1)
tan(t) = t+ 13t3 +O (t4)
sh(t) =n
k=0
t2k+1
(2k + 1)!+ ot→0(t2n+2)
26 lycée Dessaignes 2004-2005

ch(t) =n
k=0
t2k
(2k)!+ ot→0(t2n+1)
th(t) = t− 13t3 +O (t4)
(1 + t)α = 1 + nk=1
α(α−1)...(α−k+1)k!
tk + ot→0(tn)
ln(1 + t) = nk=1
(−1)k+1k
tk + ot→0(tn)
ln(1− t) = − nk=1
1ktk + ot→0(tn)
1
1− t =nk=0 t
k + ot→0(tn)
1
1 + t= n
k=0(−1)ktk + ot→0(tn)
arctan(t) = nk=0
(−1)k2k + 1
t2k+1 + ot→0(t2n+2)
7 Fonctions intégrables ur un intervalle quelconque
• Soit f une fonction continue sur l’intervalle I de R à valeurs dans R+.f est intégrable sur I si et seulement si il existe un réelM>0 tel que
∀[a, b]⊂I,b
a
f(t)dt6M
Dans ce cas on définit
I
f = sup[a,b]⊂I
b
a
f(t)dt = limn→∞
bn
an
f(t)dt
avec ∞n=0[an, bn] = I et ∀n ∈ N, [an, bn]⊂[an+1, bn+1]
• Si f est une fonction continue sur l’intervalle I de R à valeurs dans R+ non intégrable , alors
sup[a,b]⊂I
b
a
f(t)dt = +∞
Il arrive que l’on utilise pour les fonctions positives la dénomination : intégrale convergente , intégraledivergente , au lieu de fonction intégrable, fonction non intégrable. C’est parfois plus commode car celapermet de parler de la nature d’une intégrale : le théorème suivant justifie cette appellation.
• Soit F une primitive quelconque de f sur I = [a, c[ , f étant positive sur [a, c[ :f est intégrable sur [a, c[ ⇔ F admet une limite finie en c−
et dans ce cas
[a,c[
f(t)dt = limb→c−
b
a
f(t)dt = limb→c−
F (b)− F (a)
• Intégrabilité de t 7→ 1
tαsur [1,+∞[
1
tαest intégrable sur [1,+∞[ ⇔ α > 1
• Intégrabilité de t 7→ 1
tαsur ]0, 1]
1
tαest intégrable sur ]0, 1] ⇔ α < 1
27 lycée Dessaignes 2005-2006

• Intégrabilité de t 7→ 1
(b− t)α sur [c, b[
1
(b− t)α est intégrable sur [c, b[ ⇔ α < 1
• Si f et g sont équivalentes au point b et si f est positive sur [c, b[ alors[c,b[f(t)dt et
[c,b[g(t)dt sont de
même nature
• Par définition, une fonction f continue sur I est intégrable sur I si et seulement si |f | l’est.
8 Equations différentielles
• Soit a une fonction continue sur l’intervalle I contenant α.L’ensemble des solutions de l’équation différentielle linéaire homogène du premier ordre
(H) y0(x)− a(x)y(x) = 0forme un sous espace vectoriel de RI de dimension 1 , admettant pour base la fonction
x→ y(x) = expx
α
a(t)dt
la solution générale est donc donnée par
y(x) = λe
x
α
a(t)dt
• Si b est une fonction continue sur I, l’ensemble des solutions de l’équation avec second membre(E) y0 − a(x)y(x) = b(x)
s’obtient en ajoutant à la solution générale de (H) une solution particulière de (E) , que l’on peut trouver enfaisant ’’varier la constante’’ λ. On obtient:
y(x) =x
α
b(t)e
− t
α
a(u)du
dt+ µ e
x
α
a(t)dt
• Soient a, b, c trois éléments de C. On appelle équation différentielle linéaire du second ordre à coefficientsconstants l’équation
(E) ay”(x) + by0(x) + cy(x) = 0l’équation caractéristique de (E)
(eq) aX2 + bX + c = 0
gère les solutions de (E) sur R à valeurs dans C par l’intermédiaire de son discriminant∆
– ∆ 6= 0 ; si r1, r2 sont les deux racines complexes de (eq)(E)⇔ ∃(λ, µ) ∈ C2, y(x) = λer1x + µer2x
les solutions de E forment ainsi un espace vectoriel de dimension 2 , admettant pour base le couplede fonctions (x→ er1x,x→ er2x)
– ∆ = 0 ; si r1est la racine double complexe de (eq) alors(E)⇔ ∃(λ, µ) ∈ C2, y(x) = λer1x(λ+ µx)
les solutions de E forment ainsi un espace vectoriel de dimension 2, admettant pour base le couple defonctions (x→ er1x,x→ xer1x)Remarque : on retrouve les solutions à valeurs dans R en prenant la partie réelle des solutions com-
plexes. Par exemple l’équation différentielle y”(x) + y0(x) + y(x) = 0 admet pour solutions réellesx 7→ Re(λejx + µejx) ou j = e 2iπ3 = −1
2+ i
√32
28 lycée Dessaignes 2004-2005

On montre alors que les solutions s’expriment sous la forme
y(x) = αe−12x cos(
√3
2x) + βe−
12x sin(
√3
2x)
9 Notions sur les fonctions de deux variables
9.1 Espace R2. Fonctions continues
9.1.1 Espace R2
• Normes usuelles :Soit x = (x1, x2) ∈ R2
N∞(x) = sup(|x1| , |x2|)N2(x) = x21 + x
22
N1(x) = |x1|+ |x2|sont trois exemples de normes sur R2. N2 est la norme euclidienne. Ces normes sont équivalentes .
N∞(x)6N2(x)6N1(x)62N∞(x)Dans la suite on note N l’une d’entre elles
• Partie bornée A ⊆ R2 est bornée ssi∃M ∈ R+,∀x ∈ A,N(x)6M
• Boule ouverte (resp fermée) de centre a et de rayon r pour la norme NB(a, r) = x ∈ R2, N(x− a) < rB0(a, r) = x ∈ R2, N(x− a) ≤ r
• Adhérence d’une partieUn point a ∈ R2 est adhérent à A s’il est limite d’une suite de points de A, c’est à dire s’il existe une
suite (an)n∈N d’éléments de A telle que limn→∞
N(a− an) = 0.L’adhérence A de A est l’ensemble des point adhérents à A.Par exemple l’adhérence de B(a, r) dans R2 est B0(a, r).Exercice 6. Démontrer que l’adhérence de Q2 dans R2 est égale à R2.
• Partie ouverteUne partie de R2 est ouverte si et seulement si , lorsqu’elle contient un point a elle contient au moins une
boule ouverte centrée en AExemple A =]0,∞[×]0,∞[ est une partie ouverte car si a = (a1, a2) ∈ A , alors B(a,min(a1, a2))⊂AA =]0,∞[×[0,∞[ ne l’est pas car le point (1, 0) ∈ A mais aucune boule de centre (1, 0) n’est incluse
dans A
• Partie ferméeUne partie A est fermée lorsque
A = ACela revient au même de dire que le complémentaire de A est une partie ouverte
• Théorème de Bolzano-WierstrassDe toute suite bornée de points de R2 on peut extraire une sous suite-convergente.
6 SoitX = (x, y) ∈ R2.Posons xn =E(10nx)
10n∈ Q, yn =
E(10ny)
10n∈ Q.
la suiteXn = (xn, yn) est une suite de Q2 qui vérifie N∞(X −Xn) ≤ 10−n donc qui converge versX
29 lycée Dessaignes 2005-2006

9.1.2 Fonctions continues
• Une fonction définie sur A⊂ R2 à valeurs dans C est lipchitzienne sur A si et seulement si il existe k > 0tel que
∀(x, y) ∈ A2, |f(x)− f(y)|6kN(x− y)
• Une fonction définie sur A⊂ R2 à valeurs dans C est continue en a ∈ A si et seulement si∀ε > 0,∃α > 0,∀x ∈ A,N(x− a) < α⇒ |f(x)− f(a)| < ε
Il est clair que toute fonction lipchitzienne sur A est continue en tout point de A
• Applications partielles en un pointSoit f définie en a = (a1a2). On appelle applications partielles f1, f2 au point a les deux applications
f1(x) = f(x, a2)
f2(y) = f(a1, y)
elles reviennent à considérer une restriction de f sur chacune des deux droites passant par a et parallèleaux axes Ox,Oy
• Définition séquentielle de la continuitéf est continue en a si et seulement si pour tout suite (un)n∈N de points deA qui converge vers a ( c’est
à dire telle que limn→∞
N(un − a) = 0) , alors la suite (f(un))n∈N converge vers f(a)
• Toute fonction continue sur une partie A qui est fermée et bornée , à valeurs dans R , est bornée et atteintses bornes
• La continuité dans R2 est une notion assez délicate . Par exemple, il est nécéssaire pour une fonction fcontinue en a que ses deux applications partielles soient continues en a1 et a2 mais ce n’est pas suffisant:ceci provient du fait qu’il existe une infinité de directions pour s’approcher d’un point dans R2( de plus onpeut s’approcher d’un point sans nécéssairement suivre un direction donnée, par exemple en suivant unespirale qui s’enroule autour de ce point) ceci n’est pas le cas dans R .
Par exemple, l’application f : (x, y) → f(x, y) =xy2
x2 + y2et f(0, 0) = 0 est continue en (0, 0) car
|f(x, y)− f(0, 0)|6x , en effet cela prouve que f(x, y) tend vers f(0, 0) lorsque le couple (x, y) tendvers (0, 0). Dans cet exemple les deux applications partielles f1 = f2en (0, 0) sont nulles. Considéronsmaintenant l’application g : (x, y) → g(x, y) =
xy
x2 + y2et g(0, 0) = 0 . Elle n’est pas continue en (0, 0)
car limn→∞
g(1
n,1
n) =
1
2et limn→∞
g(1
n,−1n) = −1
2, cependant g1 = g2 = 0 sont toutes deux continues en 0
puisqu’elles sont nulles.
• Il peut être parfois commode de passer en coordonnées polaires pour prouver la continuité d’une applicationen 0,en posant r = x2 + y2 et x = r cos θ, y = r sin θ. En effet dire que (x, y) → (0, 0) se traduit parr → 0 . Par exemple dans le cas de f et g, on trouve f(x, y) = r cos θ sin2 θ et g(x, y) = cos θ sin θ , cequi permet alors facilement de retrouver les résultats précédents
Exercice7: soit f(x, y) =|x|α |y|β
(x2 + y2)γ, f(0, 0) = 0 où α,β, γ sont trois réels positifs. Etudier la continuité
de f
9.2 Fonctions de deux variables: calcul différentiel.
• Dérivée selon un vecteur hf est une fonction définie autour du point a = (a1, a2) ∈ R2 et
−→h = (h1, h2) ∈ R2 − 0 est un vecteur
7 f(x, y) = rα+β−2γ |cos θ|α |sin θ|β . Si α + β − 2γ > 0 alors f(x, y) →(x,y)→(0,0) 0. Si α + β − 2γ ≤ 0 , en fixantθ=π/4 , f(x, y)9(x,y)→(0,0) 0
30 lycée Dessaignes 2004-2005

donné. Il s’agit alors de considérer l’application d’une variable réelleϕ→h: t→ ϕ→
h(t) = f(a+ t
−→h )
et de regarder si elle est dérivable en 0. On pose alors:∂f
∂−→h(a) = lim
t→0f(a+ th)− f(a)
t= lim
t→0f(a1 + th1, a2 + th2)− f(a1, a2)
t
Remarque : on le note parfois ∂→hf(a)
• Dérivées partiellesOn dérive selon −→e1 ,et −→e2 vecteurs de la base canonique de R2
∂f
∂−→e1(a) est noté:
∂f
∂x(a) = lim
t→0f(a+ te1)− f(a)
t= lim
t→0f(a1 + t, a2)− f(a1, a2)
t∂f
∂−→e2(a) est noté
∂f
∂y(a) = lim
t→0f(a+ te2)− f(a)
t= lim
t→0f(a1, a2 + t)− f(a1, a2)
t
• Développement limité à l’ordre 1 en aSi les dérivées partielles de f existent et sont continues sur un voisinage de a = (a1, a2) alors f admet au
point a un développement limité à l’ordre 1 donné par l’expression suivante de f(a+h) oùh = (h1, h2) ∈ R2f(a+ h) = f(a) + dfa(h) + o(h)
avec dfa(h1, h2) =∂f
∂x(a)h1 +
∂f
∂y(a)h2
dfa est appelé la différentielle en a de f
• Gradient de fgrad(f)(a) = (
∂f
∂x(a),
∂f
∂y(a)) ∈ R2
ce vecteur donne la direction des plus fortes variations de la fonction f
(grad(f)(a) | (h1, h2)) =∂f
∂x(a)h1 +
∂f
∂y(a)h2 = dfa(h1, h2)
ce qui signifie d’après l’inégalité de Cauchy-Schwarz que|dfa(h1, h2)|6N2(grad(f)(a))N2(h)
dfa(h1, h2) est maximum lorsque h et colinéaire au gradient de fPar exemple si f(x, y) = x2 + 4y2, on trouve
−−−−−−−−−−→grad(f)(a1, a2) = (2a1, 8a2).
La ligne de niveau de f qui passe par le point (a1, a2) est l’ellipse d’équation x2 + 4y2 = a21 + 4a22.
Si le point m(x, y) se déplace dans la direction de−−−−−−−−−−→grad(f)(a1, a2), il maximise l’accroissement de f.
Sur le graphique qui suit on a représenté deux lignes de niveau de l’application f(x, y) = x2 + 4y2, c’està dire les parties du plan définies par: f(x, y) = k ou k est une constante (ici k = 5 , k = 6) . Lorsquel’on se trouve au point m(1, 1) pour k = 5, si l’on veut augmenter la fonction f le plus possible , il faut sedéplacer dans la direction donnée par
−−−−−−−−→grad(f)(1, 1) = (2, 8) indiquée sur la figure . Noter que la direction
du gradient est orthogonale à la direction de la tangente en M à la ligne de niveau, ce qui est tout à fait
31 lycée Dessaignes 2005-2006

logique puisque l’on souhaite s’en échapper le plus vite possible.
x 3210-1-2-3
y
3
2
1
0
-1
-2
-3
deux lignes de niveaux de x2 + 4y2 et gradient
• Soit A⊂ R2, et f ∈ RA. f admet au point a ∈ A unmaximum local ssi∃α > 0, ∀x ∈ A ∩B(a,α), f(x)6f(a)
• Si f est de classe C1 sur une partie ouverte A de R2 et admet en un point a de A un extrémum local , alorsdfa = 0 , ou ce qui revient au même grad(f)(a) = 0
9.3 Dérivées d’ordre supérieur
• f est de classeCk sur la partieA deR2 ssi elle y est de classeCk−1 et si toutes ses dérivées partielles d’ordrek − 1 sont de classe C1 sur AOn note alors pour xi ∈ x, y
∂
∂x1(
∂k−1f∂x2...∂xk
) =∂kf
∂x1...∂xkPar exemple
∂2f
∂x∂y(a1, a2) = lim
t→0
∂f
∂y(a1 + t, a2)−
∂f
∂y(a1, a2)
t
∂2f
∂y2(a1, a2) = lim
t→0
∂f
∂y(a1, a2 + t)−
∂f
∂y(a1, a2)
t
• Théorème de Schwarz: Si f est de classe C2 sur A∂2f
∂x∂y=
∂2f
∂y∂x
9.4 Champs de vecteurs
• Un champ scalaire C2 dans R2 est une application de classe C2 d’une partie A de R2 à valeurs dans R :
f :A → R(x, y) → f(x, y)
−−−−−→grad(f)(x, y) = (
∂f
∂x(x, y),
∂f
∂y(x, y))
Exemple: en physique, le potentiel est un champs scalaire.
• Un champ de vecteurs C2 dans R3 est une application de classe C2 d’une partie A de R3 à valeurs dansR3 :
f :A → R3m = (x, y, z) → f(m) =(f1(x, y, z), f2(x, y, z), f3(x, y, z))
Exemple: En physique , le champ de gravité de la terre.
32 lycée Dessaignes 2004-2005

On représente souvent un champ de vecteurs par la famille des couples (m, f(m)). voici par exempleun champ sur R2,associé à l’équation différentielle du modèle de Volterra modélisant l’évolution d’une
population (x =proies, y =prédateurs) x0 = x(1− y)y0 = 3y(x− 1)
• Divergence
div(f)(x, y, z) =∂f1∂x(x, y, z) +
∂f2∂y(x, y, z) +
∂f3∂z(x, y, z)
=
∂f1∂x∂f2∂y∂f3∂z (x,y,z)
.111
• Rotationnelrot(f)(x, y, z) = (
∂f3∂y− ∂f2
∂z,∂f1∂z− ∂f3
∂x,∂f2∂x− ∂f1
∂y)(x, y, z)
=
∂
∂x∂
∂y∂
∂z
∧f1f2f3
(x, y, z)
10 Nombres et structures algébriques
10.1 Ensembles, applications
10.1.1 Ensembles
• Soient R,S deux propositions: on définit les propositionsRetS, RouS, R⇒ S, nonR, R⇔ S par la table de vérité suivante
33 lycée Dessaignes 2005-2006

R S RetS RouS R⇒ S nonR R⇔ SV V V V V F VV F F V F F FF V F V V V FF F F F V V V
(non(RetS)) ⇔ ((nonR) ou (nonS))(non(RouS)) ⇔ ((nonR) et (nonS))(non(non(R)) ⇔ R
• Implication(R ⇒ S)⇔ (nonR ou S)
[non(R ⇒ S)]⇔ (R et nonS)En clair , une implication est fausse lorsque son hypothèseR ( ou prémisse) est vraie et que sa conclusionS
est fausse. Par exemple l’implication 2 < 1⇒ 1 < 2 est vraie ( eh oui!) mais l’implication 5 < 6⇒ 6 < 5est fausse.
• Quantificateurs[non[∀x ∈ E,R(x))]]⇔ [∃x ∈ E, nonR(x)][non[∃x ∈ E,R(x))]]⇔ [∀x ∈ E, nonR(x)]
Sur ce sujet , on ne peut que conseiller de lire le livre de Lewiss Caroll : Logique sans peine, édité chezHermann et illustré parmaxErnst dont voici quelquesmorceaux choisis, présentés sous forme de syllogismesdont il faut trouver la conclusionSyllogismeN1 SyllogismeN2Aucun de mes fils n 0est malhonnete Tous les chats comprennent le francaison respecte toujours un homme honnete8 quelques poulets sont des chats 9
SyllogismeN3Seuls les braves meritent la victoirequelques fanfarons sont des l aches10
• Raisonnement par contrapposée(R⇒ S)⇔ (nonS ⇒ nonR)
Par exemple si f ∈ RI et a ∈ I, il revient au même de prouver que[[f est continue en a]⇒ [pour toute suite ( un)n∈N convergente vers a, la suite f(un))n∈N converge vers
f(a)] ]ou que[ [il existe une suite ( un)n∈N convergente vers a telle que la suite f(un))n∈N ne converge pas vers f(a)]⇒
[ f n’est pas continue en a]]Noter que la négation de la phrase ’’pour toute suite (un)n∈N convergente vers a, la suite (f(un))n∈N con-
verge vers f(a)” a tout d’abord nécessité de l’écrire : [∀u ∈ IN, P (u)⇒ Q(u)] où P (u) est la proposition’’u converge vers a” et Q(u) la proposition ’’(f(un))n∈N converge vers f(a)” , afin de pouvoir la nier sousla forme [∃u ∈ IN, P (u) et non Q(u)]On comprend ainsi l’intérêt de l’écriture quantifiée sous la forme la plus dépouillée d’une proposi-
tion mathématique : cela évite l’ambiguïté d’une interprétation hasardeuse . Il ne faut cependant pastomber dans l’excès inverse , qui peut rendre un discours mathématique totalement indigeste: le mieux estl’ennemi du bien.
• Soit E un ensemble . On définit l’ensemble P(E) des parties de E8 Aucun de mes fils n est jamais traité sans respect9 quelques poulets comprennent le français10 quelques fanfarons ne méritent pas la victoire
34 lycée Dessaignes 2004-2005

P(E) = A,A⊆ENoter que: ∅ ∈ P(E)
• Soit E un ensemble et R(x) une fonction propositionnelle , c’est à dire une proposition dont la valeur devérité dépend de x ∈ EF = x ∈ E,R(x) définit une partie de E , formée des éléments de E tels que la proposition R(x) soit
vraieExemples F = x ∈ R, 1 + x+ x2 ∈ R− : vérifier que F = ∅
G = x ∈ C, 1 + x+ x2 ∈ R− vérifier que G = x =−12+ ib, b ∈ R et |b| ≥
√3
211
• Soient R,S deux fonctions propositionnelles sur E etF = x ∈ E,R(x) , G = x ∈ E,S(x)
On a alors
F ∩G = x ∈ E, R(x) et S(x)F ∪G = x ∈ E, R(x) ou S(x)CE(F ) = x ∈ E, non(R(x))
• Produit cartésienE × F = (x, y), x ∈ E et y ∈ F
10.1.2 Applications , lois de composition
• Une application de E (ensemble de départ) vers F (ensemble d’arrivée ) est la donnée d’une partie G deE × F appelée graphe de f : qui doit vérifier
∀x ∈ E, ∃!y ∈ F, (x, y) ∈ GOn appelle y l’image de x (elle est unique ), et x un antécédent de y (il n’est pas forcément unique , et
peut ne pas exister si l’on prend un élément y quelconque dans F ) et l’on notey = f(x)
On note f(E) ou Im(f) l’ensembleIm(f) = y ∈ F, ∃x ∈ E, y = f(x)
Plus généralement, si A⊂E, on appelle image de la partieA et l’on note f(A) l’ensemble des images deséléments de A
f(A) = y ∈ F, ∃x ∈ A, y = f(x)Inversement si F 0 est une partie de F on note
−1f (F 0), image réciproque de F 0 par f, l’ensemble des
éléments de E dont l’image est élément de F 0 :−1f (F 0) = x ∈ E,∃y ∈ F 0, y = f(x)
Attention : ne pas confondre cette notation avec f−1 , bijection réciproque de f.On note FE l’ensemble des applications de E vers F .Exemple12 : Soit f : R→ R définie par f(x) = x−E(x). Déterminer
f(Z),1
f (0),1
f (1/2), f(R),1
f (]0, 1[)
• Identité de EIdE :
E → Ex → IdE(x) = x
11 poser x = a+ ib et identifier12 f(Z) = 0 ,
1
f (0) = Z,1
f (1/2) = Z+1/2, f(R) = [0, 1[,1
f (]0, 1[) = R− Z
35 lycée Dessaignes 2005-2006

• Une application f ∈ FE estf est injective ⇔ [∀(x, x0) ∈ E2, [f(x) = f(x0)⇒ x = x0]]
f est surjective ⇔ [∀y ∈ F, ∃x ∈ E, y = f(x)]
f est bijective ⇔ [∀y ∈ F, ∃!x ∈ E, y = f(x)]
• La composée de deux injections (resp surjections , resp bijections ) est injective (resp surjective , respbijective)
• Si gof est injective (resp surjective) alors f est injective (resp g est surjective)
• Si f ∈ FE est bijective, il existe une unique application f−1 ∈ EF vérifiant∀(x, y) ∈ E × F, y = f(x)⇔ x = f−1(y)
f−1 est la bijection réciproque de ffof−1 = IdF
f−1of = IdE
• Loi de composition interne sur E . On nomme ainsi toute application de E ×E à valeurs dans E
∗ : E ×E → E(x, y) → x ∗ y
Notation : si n ∈ N∗ alors xn = x ∗ x.. ∗ x , n fois est l’itéré nieme de x pour la loi ∗
• Associativité∗ associative ⇔ ∀(x, y, z) ∈ E3, x ∗ (y ∗ z) = (x ∗ y) ∗ z
quand une loi est associative il est inutile de mettre des parenthèses : attention certaines lois ne sont pasassociatives ... par exemple la loi définie sur N∗ par a ∗ b = ab ne l’est pas puisque (ab)c = abc 6= a(bc) engénéral
• Elément neutre : Il existe un élément neutre e pour ∗ dans E ssi∀x ∈ E, e ∗ x = x ∗ e = x
Si e existe et si la loi ∗ est associative , alors e est unique.
• Inverse d’un élément : Si e existe et si la loi ∗ est associative , on dit que l’élément x est inversible pour ∗ssi il existe un élément x0 tel que
x0 ∗ x = x ∗ x0 = ex0 est alors unique et s’appelle l’inverse de x pour la loi ∗: il est noté x−1
• Commutativité∗ commutative⇔ ∀(x, y) ∈ E2, x ∗ y = y ∗ x
Exercice13: Soit un ensemble E muni d’une loi ∗ qui est associative, qui posséde un élément neutre e, ettelle que ∀x ∈ E, x2 = e : alors la loi ∗ est commutative
10.1.3 Relations d’équivalences, relations d’ordre
• Une partition de l’ensembleE est une famille (Ei)i∈I de parties non vides et disjointes deE dont la réunionest égale à E
i∈IEi = E, et ∀(i, j) ∈ I2, i 6= j ⇒ Ei ∩Ej = ∅ et ∀i ∈ I, Ei 6= ∅
• Une relation d’équivalence sur E est la donnée d’une partition (Ei)i∈I de E . On définit alorsR parxRy ⇔ ∃i ∈ I, x, y ⊂ Ei
R est réflexive : ∀x ∈ E, xRx
13 ∀(x, y) ∈ E2, x ∗ y ∈ E , donc (x ∗ y)2 = e = (x ∗ y) ∗ (x ∗ y) , donc (x ∗ e) ∗ y = [x ∗ [(x ∗ y) ∗ (x ∗ y)]] ce qui donnegrâce à l’associativité x ∗ y = y ∗ x
36 lycée Dessaignes 2004-2005

R est symétrique : ∀(x, y) ∈ E2, xRy ⇔ yRxR est transitive : ∀(x, y, z) ∈ E3, [[xRy et yRz]⇒ [xRz]]
Un système de représentants pourR est la donnée d’une partie F de E telle que∀x ∈ E,∃!y ∈ F, xRy
La classe d’équivalence de l’élément x de E est définie parCl(x) = y ∈ E, xRy
Remarque: Il existe un unique élément i0 de I tel que Cl(x) = Ei0∀(x, y) ∈ E2, [Cl(x) ∩ Cl(y) = ∅ ou Cl(x) = Cl(y)]
Par exemple si n est un entier naturel non nul, la relation xRy ⇔ x ≡ y mod n est une relationd’équivalence sur Z. La classe de x est Cl(x) = x + nZ. Il existe n classes disjointes E0, ..., En−1.(Ek = Cl(k) = k + nZ)06k6n−1
• Une relation C est une relation d’ordre sur E si C est réflexive , transitive et antisymétriqueC est antisymétrique: ∀(x, y) ∈ E2, [xCy et yCx]⇒ x = y
C est un ordre total si ∀(x, y) ∈ E2, [xCy ou yCx]Un ordre non total est dit partielPar exemple la relation6 est une relation d’ordre total surR. la relation⊂ est une relation d’ordre partiel
sur P(E) lorsque Card(E) ≥ 2
• Majorant, minorant d’une partie ASoit A⊂E . a ∈ E est un majorant de A (resp minorant) ssi ∀x ∈ A, xCa (resp aCx)
• Plus grand élément, plus petit élément
max(A) = a⇔ a est un majorant de A et a ∈ Amin(A) = a⇔ a est un minorant de A et a ∈ A
lorsqu’ils existentmax(A),min(A),sont uniquesPar exemple si E = P(N) , et A = ∅, 1, 2 , 1, 3 , 1, 2, 7 ,a = 1, 2, 3, 7 est un majorant de A , mais n’est pas plus grand élément de A, a = ∅ est le plus petit
élément de AExercice : Comparer max
i(min
j(ai,j)) et min
j(max
i(ai,j)) . Vérifier sur l’exemple a =
1 43 2
Solution:maxi(min
j(ai,j)) 6 min
j(max
i(ai,j))
en général il n’y a pas égalité : On étudie la cas général :∀i, j, ai,j6max
i(ai,j)
doncminj(ai,j)6min
j(max
i(ai,j)) (indépendant de i et j)
doncmaxi(min
j(ai,j)) 6 min
j(max
i(ai,j))
en effet sur notre exemple on constate quemaxi(min
j(ai,j)) = 2 et min
j(max
i(ai,j)) = 3
10.2 Nombres entiers naturels , ensembles finis , dénombrement
10.2.1 Nombres entiers naturels
• Toute partie non vide de N possède un plus petit élément . Toute partiemajorée non vide de N possède unplus grand élément.
37 lycée Dessaignes 2005-2006

• Principe de récurrence . Soit A une partie de N telle quen0 ∈ A
∀n ∈ A, [n>n0 et n ∈ A] ⇒ [n+ 1 ∈ A]Alors n ∈ N, n>n0⊂A
• Principe de récurrence avec prédécesseurs .Soit A une partie de N telle que
n0 ∈ A
∀n ∈ A, [ n0, .., n⊂A] ⇒ [n+ 1 ∈ A]Alors n ∈ N, n>n0⊂A
10.2.2 Ensembles finis
• L’ensemble E est fini ssi il existe un entier naturel n tel que E soit en bijection avec 1, .., n : n est alorsunique , et se note Card(E) ( autres notations [E], #E )
• ∅ est fini de cardinal nul
• Si E est fini alors toute partie E0⊂E de E est finie etCard(E0)6Card(E)
De plusCard(E0) = Card(E)⇒ E0 = E
• Soit E et F deux ensembles finis de cardinaux égaux . Soit d’autre part f ∈ FE : On af injective ⇔ f surjective ⇔ f bijective
• Soient E et F deux ensembles et Φ une bijection de E dans F ;Alors si E est fini, F l’est également et ils ont le même cardinal
10.2.3 Sommes et produits
•n
i=1
ai = a1 + ...+ an
n
i=1
ai = a1 × a2...× an
n
i=1
(
p
j=1
ai,j) =
p
j=1
(n
i=1
ai,j) =(i,j)∈1,.,n×1,..,p
ai,j
n
i=1
(
p
j=1
aibj) = (n
i=1
ai)(
p
i=1
bj) =(i,j)∈1,.,n×1,..,p
aibj
10.2.4 Opérations sur les ensembles finis. Dénombrement
• Si E et F sont deux ensembles finis , E ∪ F,E ∩ F le sont etCard(E ∪ F ) = Card(E) + Card(F )− Card(E ∩ F )
Card(E ∪ F ∪G) = Card(E) + Card(F ) + Card(G)
−Card(E ∩ F )− Card(F ∩G)− Card(E ∩G)+Card(E ∩ F ∩G)
38 lycée Dessaignes 2004-2005

Card(n
i=1
Ei) =n
k=1
(−1)k+1(i1,..,ik)∈Pk(1,..n)
Card(Ei1 ∩ .. ∩Eik)
Pk(1, ..n) désignant ici l’ensemble des parties à k éléments de 1, ..n
• Produit cartésienCard(E × F ) = Card(E)× Card(F )
• Lemme des bergersSoit f une application surjective de E dans F telle que
∃p ∈ N∗,∀y ∈ F,Card(−1f (y)) = p
alorsCard(E) = p× Card(F )
• Ensemble FE des applications de E dans F parfois noté F(E,F )Card(FE) = Card(F )Card(E)
• Ensemble des parties de ECard(P(E)) = 2Card(E)
Cette formule se démontre en utilisant la bijection Φ : P(E) → F(E, 0, 1)A → 1A
ou 1A est définie par : ∀x ∈ E, 1A(x) = 1 si x ∈ A et 1A(x) = 0 si x /∈ A1A est la fonction caractéristique de A
• Nombre d’injectionsSoit E,F deux ensembles finis de cardinal respectifs p = Card(E),n = Card(F ) tels que p6n. le nombre d’injections de E dans F est
Apn = n(n− 1)..(n− p+ 1)cela revient à choisir successivement les images des éléments de E, en prenant soin de les choisir dif-
férentes .
• Nombre de bijections Si E et F sont de même cardinal , le nombre de bijections de E dans F estAnn = n!
Une application bijective de E dans lui même est appelée permutation de E.
S(E) = f ∈ EE, f bijectivecard(S(E)) = n!
• CombinaisonsSoit E un ensemble de cardinal n . On appelle combinaison à p éléments de E toute partie de E de
cardinal p. Il existe Cpn parties à p éléments de E
np
=n(n− 1)..(n− p+ 1)
p!=
n!
p!(n− p)!np
+n
p− 1 =n+ 1p
Formule de Pascal
n
k=0
nk
= 2n,n
k=0
(−1)n nk
= 0
np
=n
p
n− 1p− 1
39 lycée Dessaignes 2005-2006

np
=n
n− pn+p
k=n
nk
=n+ 1
n+ p+ 1
• Triangle de Pascaln\p 0 1 2 3 4 5 60 1 0 0 0 0 0 01 1 1 0 0 0 0 02 1 2 1 0 0 0 03 1 3 3 1 0 0 04 1 4 6 4 1 0 05 1 5 10 10 5 1 06 1 6 15 20 15 6 1
Exercice 14: Déterminer le nombre d’applications 1, 2, .., 2n dans lui même qui transforme tout nombrepair en un nombre pair , et dont la restriction à l’ensemble des nombres impairs est injective.
10.3 Structures algébriques usuelles
• Un groupe est un couple (G, ∗) formé d’un ensembleGmuni d’une loi de composition interne ∗, associative, possédant un élément neutre e , et telle que tous les éléments de E possédent un inverse dans E
• Soit (G, ∗) un groupe et G0 une partie non vide de G . G0 est un sous-groupe de G si elle est stable pour laloi ∗ et si de plus (G0, ∗) est un groupe. Ceci est équivalent à montrer que
e ∈ G0
∀(x, y) ∈ G02, x ∗ y−1 ∈ G0
• Une application f de (G, $) dans (H,$) est unmorphisme ssi∀(x, y) ∈ G, f(x$y) = f(x)$f(y)
Si f est un morphisme surjectif et si (G, $) est un groupe alors (H,$) est un groupe et de pluseH = f(eG)
f(x−1) = (f(x))−1
• Le noyau d’un morphisme de groupe f estker(f) = x ∈ G, f(x) = eH
C’est un sous groupe de (G, $)
• L’image d’un morphisme de groupe f estIm(f) = f(G)
• Un morphisme f est injectif ssi ker(f) = eG . Il est surjectif ssi Im(f) = H
• Un groupe est commutatif ssi la loi du groupe l’est . (Z,+) est un exemple de groupe commutatif10.3.1 Sous groupe engendré par un élément.
14 Une telle application f est entièrement connue lorsque l’on connait le couple formé de ses deux restrictions (f1, f2) auxnombres pairs P et aux nombres impairs I. Pour déterminer l’image des éléments de P, il faut et suffit que l’on se donne uneapplication de P dans lui même ce qui correspond à nn choix. Pour déterminer l’image des éléments I il faut et il suffit que l’onse donne une injection de I dans E , ce qui correspond à An2n =
2n!
n!choix possibles . Or le cardinal des possibilités pour le
couple (f1, f2) correspond à celui d’un produit cartésien. Il y a doncnn.2n!
n!telles applications.
40 lycée Dessaignes 2004-2005

• Soit (G, ∗) un groupe commutatif et a ∈ G . On note∀n ∈ N∗, an = a ∗ .. ∗ a, n fois∀n ∈ Z−, an = (a−n)−1 et a0 = e.
Gr(a) = an, n ∈ ZL’ensemble Gr(a) est un sous-groupe de G appelé sous groupe engendré par aPar exemple si (G, ∗) = (U,×) est le groupe des complexes de module 1, et a = e
2iπ5
Gr(a) = 1, a, a2, a3, a4 = U5n’est autre que le sous groupe des racines cinquièmes de l’unité dans C.
• Ordre d’un élément dans un groupeSoit a ∈ G. On dit que a est d’ordre fini ssi il existe un entier p>1 tel que
ap = e et ∀k ∈ 1, .., p− 1 , ak 6= e.p est l’ordre de a :il est unique lorsqu’il existe , mais n’existe pas nécessairementpar exemple dans (U,×), a = ei n’est pas d’ordre fini 15, alors que a = e
2iπ5 est d’ordre 5
• Groupe cyclique . Un groupe G est cyclique lorsqu’il existe un élément a de ce groupe tel queGr(a) = G
Par exemple (Z,+) est cyclique car Z = Gr(1) = Gr(−1) , U5 est cyclique car U5 = Gr(e2iπ5 ) ,
cependant (R,+) n’est pas cyclique puisque si a 6= 0, Gr(a) = Za = na, a ∈ Z , et Za 6= ROn appelle générateur d’un groupe cyclique tout élément a qui vérifie Gr(a) = G
• Le groupe Un des racines niemes de l’unité est cyclique , de cardinal n. Il admet pour générateur α = e2iπn ,
ainsi que tous les éléments de la forme αk ou 16k6n− 1 est un nombre premier avec n.10.3.2 Le groupe symétrique
• Groupe symétrique . On nomme ainsi le groupe Sn des permutations de 1, .., nCard(Sn) = n!
• La transposition ti,j de Sn est l’application telle que ti,j(i) = j, ti,j(j) = i qui laisse tous les autres élémentsde 1, .., n invariants
• Le cycle ci1,..,ikest l’application c telle que ∀j ∈ 1, .., k − 1 , c(ij) = ij+1 et c(ik) = i1Une transposition est un cycle de longueur 2
• Génération de Sn par les transpositions∀σ ∈ Sn,∃p ∈ N∗,∃t1, .., tp, p transpositions telles que σ = t1ot2o.......otp
Remarque : toute permutation peut se décomposer comme produit commutatif de cycles à supports dis-
joints Par exemple f : 1 2 3 4 5 6 74 1 5 2 3 7 6 est la composée commutative de c1,4,2, c3,5, c6,7
• Signature d’une permutation∀σ ∈ Sn,σ = t1ot2o.......otp ⇒ ε(σ) = (−1)p
L’application ε est un morphisme de (Sn, o) dans (−1, 1 ,×). C’est d’ailleurs le seul morphisme nontrivial.
• Le noyau de ce morphisme est l’ensemble des permutations dont la signature est égale à 1 , que l’on nommepermutations paires
An = σ ∈ Sn, ε(σ) = 1An est un sous groupe de Sn, appelé groupe alterné.
15 en effet ak = eik : ak = 1⇔ k = 2rπ ⇔ k = r = 0 car sinon on aurait π ∈ Q
41 lycée Dessaignes 2005-2006

• Exercice: peut on passer de la position du taquin n 1 :1 2 34 5 67 8
à la position n 2 :2 1 34 5 67 8
en
utilisant la case vide pour faire glisser les pièces verticalement ou horizontalement ? 16
10.3.3 Anneaux, Corps
• Un anneau (A,+,×) est un ensemble muni de deux lois internes +,× tel que(A,+) est un groupe commutatif× est associative× possède un élément neutre 1A× est distributive sur +
si la loi × est commutative , l’anneau est dit commutatif
• Eléments inversiblesOn note A∗ l’ensemble des éléments de A qui admettent un inverse pour la loi ×
A∗ = x ∈ A,∃y ∈ A, xy = yx = 1AA∗ est un groupe multiplicatif
• Corps .Un corps est un anneau commutatif dans lequel tous les éléments non nuls sont inversibles
• Un anneau commutatif est intègre ssi∀(x, y) ∈ A2, xy = 0⇒ x = 0 ou y = 0
(Z,+,×) est un anneau intègre . (Q,+,×) est un corps
• Divisibilité dans Z. Soient (a, b) ∈ Z2. b est unmultiple de a ssi il existe k ∈ Z tel que b = kadans ce cas a est un diviseur de b. On le note:
a | b⇔ ∃k ∈ Z, b = ka
• Division euclidienne dans Z∀(a, b) ∈ Z×N∗,∃!(q, r) ∈ Z×N, a = bq + r et 06r6b− 1
q est le quotient et r est le reste dans la division euclidienne de a par b
• Formule du binômeSoit A un anneau et x, y deux éléments de A qui commutent . Alors
(x+ y)n =n
k=0
nk
xkyn−k
xn − yn = (x− y)(n−1
k=0
xn−k−1yk)
x2 − y2 = (x− y)(x+ y)x3 − y3 = (x− y)(x2 + xy + y2)x3 + y3 = (x+ y)(x2 − xy + y2)
10.3.4 Espaces vectoriels
16 Non . associons à chaque position du taquin la suite des chiffres lus dans la table en parcourant successivement les lignes degauche à droite. On obtient ainsi une permutation de 1, .., 8 . la position n2 définit une permutation de signature -1, alors quela position n1 a pour signature 1 : or toutes les transformations possibles sur le taquin sont soit l’identité pour le glissementshorizontaux, soit des cycles d’ordre 3 pour les glissements verticaux, dont la signtaure est égale à 1. Il est donc impossibleen composant de telles permutations d’obtenir une signature égale à −1
42 lycée Dessaignes 2004-2005

• Soit (E,+) un groupe commutatif etK un corps . On nomme loi de composition externe surE à domained’opérateurs dans K toute application de K×E dans E notée (α, x)→ α.x qui vérifie les quatre axiomes
• ∀(x, y) ∈ E2,∀(α,β) ∈ K2,α.(x+ y) = α.x+ α.y(α+ β).x = α.x+ β.x
α.(β.x) = (αβ).x1K.x = x
Le triplet (E,+, .) est alors appelé K espace vectorielLes éléments de E sont appelés vecteurs . Le vecteur nul est noté 0ELes éléments de K sont appelés scalaires. Le scalaire nul est noté 0K
• Une partie F de E est un sous-espace vectoriel de E ssi F est un sous groupe additif de E , stable pour . ,ce qui revient à dire que
F 6= ∅ et ∀(x, y) ∈ F, ∀α ∈ K, x+ αy ∈ F
• Soient (E,+, .) et (F,⊕,¯) deux K espaces vectoriels et f ∈ FE . f est une application linéaire ssi lesdeux propriétés suivantes sont vérifiées
∀(x, y) ∈ E2, f(x+ y) = f(x)⊕ f(y)∀(x,α) ∈ E ×K, f(α.x) = α¯ f(x)
On note L(E,F ) l’ensmble des applications linéaires de E dans F
• Une forme linéaire sur E est une application linéaire de E dans KRem: il suffit de bien comprendre comment fonctionnent les formes linéaires pour comprendre l’algèbre
linéaire , ce sont en effet les briques élémentaires de cette théorieL(E,K) est noté E∗ , c’est le dual de E
• La composée de deux applications linéaires est linéaire
• Un endomorphisme de E est une application linéaire de E dans EOn note L(E) l’ensemble des endomorphismes de E
• On appelle isomorphisme de E vers F toute application linéaire bijective de E dans FOn note parfois Isom(E,F ) l’ensemble des isomorphismes de E vers F
• On appelle automorphisme de E tout isomorphisme de E dans E .On note GL(E) l’ensemble des automorphismes de E
• Si f est un isomorphisme de E dans F , alors f−1est un isomorphisme de F dans E
• Espace produitSoient (E,+, .) et (F,⊕,¯) deux K espaces vectoriels . E × F est un K espace vectoriel lorsqu’il est
muni des lois produit (E × F, ¢,¡)(x, y sont deux vecteurs quelconques et α un scalaire quelconque )
(x, y)¢ (x0, y0) = (x+ x0, y ⊕ y0)α¡ (x, y) = (α.x,α¯ y)
Il va de soi que ces symboles sont là pour montrer la distinction entre les différentes lois , et que dans lapratique pour ne pas compliquer inutilement, on note souvent l’addition + et la loi externe . quelquesoitl’espace dans lequel on travaille.
• Soit X un ensemble et (E,+, .) un K espace vectoriel . l’ensemble F(X,E) = EX des applications deX dans E est espace vectoriel sur K lorsqu’il est muni des lois (EX ,⊕,¯) (f et g sont deux applicationsquelconques et α un scalaire quelconque)
∀x ∈ X, (f ⊕ g)(x) = f(x) + g(x)∀x ∈ X, (α¯ f)(x) = α.f(x)
43 lycée Dessaignes 2005-2006

• En particulier L(E,F ) est un sous espace vectoriel de FE . De plus∀(u, u0, v, v0) ∈ L(F,G)2 × L(E,F )2,∀α ∈ Kuo(v + αv0) = uov + α.uov0
(u+ αu0)ov = uov + α.u0ovce que l’on traduit en disant que les deux applications suivantes sont linéaires
Φu :L(E,F ) → L(E,G)v → uov
Φv :L(F,G) → L(E,G)u → uov
• Noyau , Image . soit f ∈ L(E,F ).Im(f) = f(E) = y ∈ F, ∃x ∈ E, y = f(x)
ker(f) =−1f (OF) = x ∈ E, f(x) = OF
Im(f) est un sous espace vectoriel de F , et ker(f) est un sous-espace vectoriel de E
• Equation u(x) = b. Soit u ∈ L(E,F ) et b ∈ FL’équation u(x) = b dont l’inconnue est x ∈ E n’admet aucune solution lorsque b /∈ Im(f). Si b ∈ Im(f)
, et si x0 est un antécédent de b par u alorsu(x) = b = u(x0)⇔ x− x0 ∈ ker(u)
• Combinaison linéaire . Soient (xi)16i6n une famille de vecteurs de E. On appelle combinaison linéaire decette famille tout vecteur x qui s’écrit
x =n
i=1
αi.xi
où les αi sont des scalairesPar exemple , la fonction f1 : x → cos(2x) est combinaison linéaire des fonctions f2 : x → sin2(x) et
f3 : x→ cos2(x): en effet f1 = f3 − f2• Soient F , G deux sous-espaces vectoriels de E . Alors F ∩G est aussi un sous-espace vectoriel de E . Lessous-espaces OE et E sont appelés les sous-espaces triviaux
• Sous-espace vectoriel engendré par une partieSoitA une partie deE . On appelle sous-espace vectoriel engendré parA le plus petit sous espace vectoriel
de E qui contient A . C’est aussi l’ensemble de toutes les combinaisons linéaires possibles d’éléments deA. On le note vect(A)vect(A) =
F, sev deE contenantA
F
vect(A) = x ∈ E, ∃n ∈ N∗, ∃(α1, ..,αn) ∈ Kn, ∃(x1, .., xn) ∈ An, x =n
k=1
αi.xi
• Somme de deux sous- espaces vectoriels F et G de EF +G = z ∈ E, ∃(x, y) ∈ F ×G, z = x+ yF +G = vect(F ∪G)
• Sous-espaces supplémentairesDeux sous espaces vectoriel F et G de E sont supplémentaires ssi
F +G = EF ∩G = OE
Ceci revient à dire que tout vecteur x de E s’écrit de manière unique sous la forme d’une sommex = xF + xG, xF ∈ F, xG ∈ G
44 lycée Dessaignes 2004-2005

xF s’appelle le projeté de x sur F parallèlement à G.On note alors
E = F ⊕G
• Projecteurs associésl’ application pF :
E → Ex → xF
est la projection sur F parallèlement à G : elle vérifiepFopF = pF
Im(pF ) = ker(Id− pF ) = Fker(pF ) = Im(Id− pF ) = G
On définit de même la projection pG sur G parallèlement à F .pF + pG = IdE
pF et pG sont des projecteurs associés.
• Caractérisation des projecteurs . soit p ∈ L(E)pop = p⇔ p est la projection sur Im(p) parallèlement à ker(p)
L’écriturex = p(x) + (x− p(x))
met en évidence la décomposition de x en somme d’un vecteur p(x) de Im(p) et d’un vecteur x − p(x)de ker(p)Remarque : on dit indifféremment projection vectorielle ou projecteur
10.3.5 Algèbres
• Soit A un ensemble muni de deux lois de composition internes notées + et × et d’une loi de compositionexterne sur le corps K. (A,+,×, .) est une K algèbre si et seulement si
(A,+, .) est un K espace vectoriel(A,+,×) est un anneau commutatif
∀α ∈ K2,∀(x, y) ∈ A2,α.(x× y) = (α.x)× y = x× (α.y)
• Soit E un K espace vectoriel . (L(E),+, o, .) est une K algèbre
10.4 Arithmétique élémentaire
10.4.1 Numération
• Numération en base a, où a est un entier >2Soitn ∈ N. Il existe un unique entier naturel p , et un unique (p+1)-uplet (α0, ...,αp) ∈ 0, 1, .., a− 1p+1
tel que
n =
p
k=0
αkak
et αp 6= 0 . Les αk sont appelés les chiffres de l’écriture de n en base aOn obtient αk par l’algorithme suivant écrit en langage MAPLE
decomp : = proc(n, a)
local ,L,m, r;L : = NULL; m := n;
whilem < > 0 do
r : = irem(m, a); m := iquo(m, a);
L : = L, r
45 lycée Dessaignes 2005-2006

od;
RETURN(L)
end;
Ici NULL désigne la liste vide , irem le reste iquo le quotientdecomp(100, 3); réponse : 1, 0, 2, 0, 1
• Algorithme d’exponentiation rapide :Pour calculer xn on décompose n en base 2: n = p
i=0 αi2i , puis on remarque que
xn =i tel que αi=1
x2i
De plus la suite x2i vérifie x2i+1 = (x2i)2. Il suffit donc de calculer x, x2, x4, .., x2p par élévation au carrésuccessives , ce qui fait p ∼ ln2(n) calculs , et de multiplier celles de ces puissances dont l’indice est tel queαi = 1. on gagne donc un facteur
n
ln2(n)par rapport à la méthode simple qui consisterait à multuplier x , n
fois pas lui même. Par exemple si n = 106; le gain est de l’ordre de 50000
multrap : = proc(x, n)
local m, p, y, r;
m : = n; p := 1; y := x;
while m < > 0 do r := irem(m, 2);m := iquo(m, 2);
if r = 1 then p := p ∗ y fi;y : = yˆ2 od;
RETURN(p);
end;
multrap(x, 100) : Reponse x100
Remarque : on peut encore faire mieux en utilisant la base 3 et le fait que tout entier naturel peut s’écrire pi=0 αi3
i avec αi =−1, 0, 1
10.4.2 Divisibilité dans l’anneau Z
• Ensemble des diviseurs positifs de n∀n ∈ N∗, Div(n) = k ∈ N, k | n
• Plus grand commun diviseur , plus petit commun multiplep gcd(m,n) = n ∧m = max(Div(|n|) ∩Div(|m|))ppcm(n,m) = n ∨m = min(nZ ∩mZ ∩N∗)
• Nombres premiers entre euxn ∧m = 1⇔ n etm sont premiers entre eux
Dans ce casn ∨m = |nm|
• Paramétrage d’un couple d’entiers à l’aide de leur pgcd∀(n,m) ∈ N2,∃!(n0,m0) ∈ N2 , n0 ∧m0 = 1 et n = n0(n ∧m) etm = m0(n ∧m)
• Lien entre pgcd et ppcm(n ∧m)(n ∨m) = |nm|
46 lycée Dessaignes 2004-2005

• Théorème de Bezout : n etm sont deux entiers relatifsn ∧m = 1⇔ ∃(u, v) ∈ Z2, nu+mv = 1n ∧m = d⇒ ∃(u, v) ∈ Z2, nu+mv = d
la réciproque est vraie lorsque d = 1 , mais fausse dans les autres cas
• Théorème de Gauss[n ∧m = 1 et n | mp]⇒ n | p
• Algorithme d’Eucliden ∧m est le dernier reste non nul dans la suite strictement décroissante rk d’entiers naturels définie
para = bq0 + r0, b = r0q1 + r1, r0 = r1q2 + r2, r1 = r2q3 + r3...etc.
p gcd : = proc(a, b)
local x, y, z;
x : = a; y := b; z := irem(a, b);
while z < > 0 do x := y; ,y := z; z := irem(x, y) od;RETURN(y);
end;
Exercice17: a, b étant deux entiers naturels non nuls donnés, déterminer tous les entiers c tels quec | ab, a | bc, b | ac
10.4.3 Nombres premiers
• Nombres premiersUn entier naturel p ≥ 2 est premier ssi
Div(p) = 1, p
• Si p est premier , il est premier avec tout nombre qu’il ne divise pas
• L’ensemble P des nombres premiers est infini
• Décomposition en facteurs premiers
∀n ∈ N∗, ∃!r ∈ N∗, ∃!(p1, .., pr) ∈ Pr, p1 < .. < pr, ∃!(α1, ..,αr) ∈ N∗r, tels que n =r
i=1
pαii
On définit la fonction valuation d’ordre p , notée vp par :
vp(n) =0 si p ne figure pas dans la décomposition en facteurs premiers de n
α si p figure dans la décomposition en facteurs premiers de n avec l’exposant αOn a alors
vp(nm) = vp(n) + vp(m)
vp(n
m) = vp(n)− vp(m)
Exercice18. Combien y a t’il de solution c au problème c | ab, a | bc, b | ac lorsque a = 900 etb = 54
10.5 Polynômes, fractions rationnelles
17 posons d = a ∧ b, a = dα, b = dβ. On doit alors résoudre c | αβd2, α | βc, β | αc et puisque α ∧ β = 1, on endéduit par le théorème de Gauss que α | c, β | c, donc αβ | c . Enfin c = kαβ | αβd2 ⇔ k | d2. Les solutions sont donc lesentiers c = kαβ où k est un diviseur de d2.18 On a ici d = 18 = 2× 32 , d’ou d2 = 22 × 34. un diviseur de d2 s’écrit k = 2α × 3β avec 0 ≤ α ≤ 2 et 0 ≤ β ≤ 4. Il y adonc 15 solutions positives
47 lycée Dessaignes 2005-2006

10.5.1 Algèbre K[X] et corps K(X)
• Polynôme : c’est une suite a = (an)n∈N ∈ KN, nulle à partie d’un certain rang .On note X la suite (0, 1, 0, 0, ....) et 1 la suite (1, 0, 0, 0, ....)On définit les lois +, ×, . par
(a+ b)n = an + bn
(a× b)n =n
k=0
akbn−k
(α.a)n = αanOn remarque que Xp = (0, 0, .., 0, 1, 0, 0, ...), puis que tout polynôme a peut s’écrire comme une com-
binaison linéaire de la famille (X i)i∈N. Dès lors, on abandonne la notation séquentielle (an)n∈N pour unenouvelle notation :
P =n
k=0
akXk
(K[X],+×, .) est une K algèbre intègre
• Degré d’un polynôme
si an 6= 0, deg(n
k=0
akXk) = n
deg(0) = −∞ par conventionan 6= 0 est le coefficient dominant de P .Lorsque an = 1 P est unitaire
deg(PQ) = deg(P ) + deg(Q)
deg(αP ) = deg(P )
deg(P +Q) ≤ max(deg(P ), deg(Q))
• Espace Kp[X]les polynômes de degré inférieur ou égal à p forment un sous-espace vectoriel de E noté Kp[X]
• Division euclidienne dans K[X]∀(A,B) ∈ K[X]× (K[X]− 0), ∃!(Q,R) ∈ K[X]2
A = BQ+R et deg(R) < deg(B)
Q est le quotient et R le reste dans la division euclidienne de A par B
• Divisibilité :Le polynôme B divise le polynôme A ssi il existe un polynôme Q tel que A = BQ, ce qui se note
B | A
• Corps K(X)C’est le corps des fractions de K[X]
K(X) =P
Q, (P,Q) ∈ K[X]×K[X]− 0
SiP
Q∈ K(X) on définit le degré de F par
deg(F ) = deg(P )− deg(Q)
48 lycée Dessaignes 2004-2005

10.5.2 Fonction polynômiale, fonction rationnelle
• Soit P = nk=0 akX
k ∈ K[X], on appelle fonction polynomiale associée à P la fonction
fP :K → Kx 7→ n
k=0 akxk
• Equation algébriqueC’est une équation du type fP (x) = 0 ,ou fP est la fonction polynomiale associée à P
n
k=0
akxk = 0K
• Racine(s) d’un polynômeCe sont les solutions de l’équation algébrique fP (x) = 0 associée au plolynôme P
α est racine de P ⇔ fP (α) = 0
α est racine de P ⇔ le reste dans la division de P par (X − α) est nul
• Ordre de multiplicité d’une racineα est racine de P d’ordre r > 0⇔ (X − α)r | P et non[(X − α)r+1 | P ]α est racine de P d’ordre r > 0⇔ [fP (α) = f
0P (α) = .. = f
(r−1)P (α) = 0] et [f (r)P (α) 6= 0]
• Pôles d’une fraction rationnelleF =
P
Qadmet pour pôles les réels a racines du polynômeQ telles que l’ordre de a dansQ soit strictement
supérieur à l’ordre de a dans P ( si a n’est pas racine de P ce second ordre est nul)
• Formules de Taylor pour les polynômes
P (X) =
deg(P )
n=0
(X − a)nn!
P (n)(a)
P (a+X) =
deg(P )
n=0
Xn
n!P (n)(a)
• Un polynôme est scindé sur K si ce polynôme peut s’écrire comme produit de polynômes de degrés 1
P = an
k=1
(X − αk) (1)
(α1, ..,αn) sont alors les racines de P
• Relations entre coefficients et racines de P :Soit
P =n
k=0
akXk (2)
un polynôme scindé admettant (α1, ..,αn) pour racines : On a les formules−an−1an
=i
αi
+an−2an
=1≤i<j≤n
αiαj
−an−3an
=1≤i<j<k≤n
αiαjαk
(−1)kan−kan
=1≤i1<i2<..<ik≤n
αi1αi2..αik
49 lycée Dessaignes 2005-2006

(−1)ka0an
=n
k=1
αk
Ces formules s’obtiennent en développant (1) et en identifiant dans (2)
an
k=1
(X − αk) = a(Xn −
i
αiXn−1 +
i<j
αiαjXn−2 + ...+ (−1)n
n
k=1
αk)
• Théorème de d’Alembert-Gaussdans C[X] , tous les polynômes sont scindés
Les polynômes irréductibles de C[X] sont donc ceux dont le degré est 1Les polynômes irréductibles de R[X] sont ceux dont le degré est 1 ou ceux dont le degré est 2 et dont le
discriminant est négatif
• Factorisation de aX2 + bX + c ∈ C[X] lorsque ∆ = b2 − 4ac < 0aX2 + bX + c = a(X − z)(X − z)
où
z =−b+ i
√4ac− b22a
et z =−b− i
√4ac− b22a
• Factorisation de Xn − 1 dans C , dans R
Xn − 1 =n−1
k=0
(X − e2ikπn )
X2n − 1 = (X − 1)(X + 1)n−1
k=1
(X2 − 2 cos(kπn)X + 1)
X2n+1 − 1 = (X − 1)n
k=1
(X2 − 2 cos( 2kπ2n+ 1
)X + 1)
Exercice19 : Montrer que si p ≤ n , le polynôme P = X2p +X2p−1 + 1 divise le polynômeQ = X2n +X2n−1 + 1
10.5.3 Divisibilité dans l’anneau K[X]
• La théorie du pgcd est en tout point analogue à celle développée dans Z , ceci tient au fait que l’anneau Z etl’anneau K[X] sont tous deux euclidiens (munis d’une division euclidienne)
10.5.4 Décomposition en éléments simples d’une fraction rationnelle
• Partie entière : Soit F = P
Qune fraction rationelle de C[X]. Il existe un unique polynôme E tel que
F = E +P1Q
et deg(P1) < deg(Q)
E est la partie entière de F
• Décomposition en éléments simples
19 Les racines de P = X2p + X2p−1 + 1 = (X2p−1 − j)(X2p−1 − j2) sont les 2p−1 racines ’’2p−1 iemes” de j et les 2p−1racines ’’ 2p−1 iemes ’’ de j2 ( conjuguées des précédentes ) Soit α une de ces racines , par exemple telle que α2
p−1= j : On a
α2n−1
=hα2
p−1i2n−p
= j2n−p
or j4 = j , j8 = j2, j16 = j...etc ( soit j soit j2). Donc Q(α) = (α2n−1 − j)(α2n−1 − j2) =
α2n
+ α2n−1
+ 1 = 0. On en déduit que Q est divisible par P puisque les racines de P sont toutes simples
50 lycée Dessaignes 2004-2005

Si Q = rk=1(X − αk)
pk , alors la fraction F =P
Qs’écrit de manière unique
F = E +r
k=1
pk
j=1
λj,k(X − αk)j
où E est la partie entière de F
L’expression pkj=1
λj,k(X − αk)j
s’appelle la partie polaire de F relative au pôle αk
• Calcul de λj,pkLe numérateur de la fraction
λpk,k(X − αk)pk
s’obtient en multipliant F par (X −αk)pk et en donnant àX la
valeur αk. On peut alors procéder de même en soustrayantλpk,k
(X − αk)pkà F pour obtenir
λpk−1,k(X − αk)pk−1
et
ainsi de suite
• Cas d’un pôle simpleSi α est un pôle simple de F , la partie polaire relative à α dans F s’écrit
λ
(X − α)où
λ =P (α)
Q0(α)
• Décomposition en éléments simples de P0
Psi P = r
k=1(X − αk)pk alors
P 0
P=
r
k=1
pk(X − αk)
On retrouve cette formule de façon heuristique en dérivant
” ln(P ) =r
k=1
pk ln(X − αk) ”
11 Algèbre Linéaire
11.1 Espaces vectoriels de dimension finie
11.1.1 Familles libres, génératrices, bases
• Une famille (ai)16i6n de vecteurs de l’espace vectoriel E est libre ssi la seule combinaison linéaire desvecteurs de la famille qui soit nulle est celle dont tous les coefficients sont nuls
∀(λ1, ..,λn) ∈ Kn,n
k=1
λiai = 0E ⇒ (λ1, ..,λn) = (0K, 0K, .., 0K)
• Une famille est liée si il existe une combinaison linéaire nulle autre que la combinaison trivialen
k=1
λiai = 0E et (λ1, ..,λn) 6= (0K, 0K, .., 0K)
C’est donc une famille non libreattention: (λ1, ..,λn) 6= (0K, 0K, .., 0K) signifie que l’un au moins des λi est non nul et non que tous les
λi sont non nulsPar exemple dans R[X] la famille (X, (X−1)2, (X+1)2) est liée puisque −4X−(X−1)2+(X+1)2 = 0Lorsque qu’une famille contient le vecteur nul , elle est liée
51 lycée Dessaignes 2005-2006

la famille (ai)16i6n de vecteurs de l’espace vectoriel E est liée ssi l’un des vecteurs de la famille peuts’exprimer comme une combinaison linéaire des autresPar exemple : X = −1/4(X − 1)2 + 1/4(X + 1)2
• Famille libre de cardinal 1Une famille (a) de un vecteur unique est libre ssi a 6= 0E
• Famille libre de cardinal 2Une famille (a, b) de deux vecteur est libre ssi b 6= 0E et a n’est pas colinéaire à b ( a /∈ V ect(b))
• Famille libre de cardinal 3Une famille (a, b, c) de trois vecteurs est libre ssi c 6= 0E et b n’est pas colinéaire à c ( b /∈ V ect(c)) et
a /∈ V ect(b, c)On pourrait continuer ainsi cette caractérisation , cependant la meilleure façon de prouver qu’une famille
est libre est sans conteste de revenir à la définition originalen
k=1
λiai = 0E ⇒ (λ1, ..,λn) = (0K, 0K, .., 0K)
Exemple20: Montrer que la famille des fonctions fi(x) = (sin(ix))1≤i≤n est libre
• Famille génératrice de EUne famille (ai)16i6n est génératrice ssi tout vecteur de E est combinaison linéaire des vecteurs de cette
famille , ou encoreV ect((ai)16i6n) = E
Soit : ∀x ∈ E,∃(λ1, ..,λn) ∈ Kn, x =n
k=1
λiai
Par exemple la famille (1, X, ..,Xn) est génératrice dans Kn[X] , mais ne l’est pas dans Kn+1[X]
• Base : une famille (ai)16i6n est une base de E ssi elle est à la fois libre et génératriceDans ce cas
∀x ∈ E,∃!(x1, .., xn) ∈ Kn, x =n
k=1
xiai
La suite finie (x1, .., xn) s’appelle la suite des coordonnées de x
• Base canonique de Kn : C’est(ei = (δi,j)16j6n)16i6n
où δi,j =0 si i 6= j1 si i = j est le symbole de Kroneker
ei = (0, 0, .., 1iiemeposition, 0, .., 0)
• Caractérisation d’une application linéaire de L(E,F ) par la donnée des images des vecteurs d’unebase de ESoit (ai)16i6n une base deE et (bi)16i6n une famille de n vecteurs quelconques de F . Il existe une et une
seule application linéaire f ∈ L(E,F ) qui vérifie∀i ∈ 1, .., n , f(ai) = bj
Elle est définie par la formule
∀x ∈ E, si x =n
i=1
xiai alors f(x) =n
i=1
xibi
20 remarquons tout d’abord que si i 6= j,−2R π0sin(ix) sin(jx)dx =
R π0cos((i+j)x)+cos((i−j)x)dx = 0 Supposons
une relation de la formePni=1 λifi = 0 . Soit j un entier compris entre 1 et n. On a donc 0 =
R π0fj(x)(
Pni=1 λifi(x))dx =
λjR π0sin2(jx)dx ce qui prouve que λj = 0 . La méthode utilise le produit scalaire (f | g) =
R π0fg, employé par exemple dans
les séries de Fourier.
52 lycée Dessaignes 2004-2005

11.1.2 Dimension d’un espace vectoriel
• Un espace vectoriel E surK est de dimension finie s’il possède une partie génératrice finieG. Dans ce cassi l’on considère une famille libre L⊂G, on démontre qu’il existe une base B de E telle que L⊂B⊂G
• Dans ce cas toutes les bases de E ont même cardinal n appelé dimension de E : n = dimE
• Théorème de la base incomplèteToute famille libre de E peut se complèter en une base de E
• Extraction d’une sous famille basiquetoute famille génératrice de E admet une sous famille qui est une base de E.
• Deux espaces vectoriels de dimension finie sont isomorphes si et seulement si ils ontmême dimension.
• Critères pour qu’une famille finie soit basique en dim finie :Si L une famille libre de E :
card(L)6dimEL est une base de E ⇔ card(L) = dimE
Si G une famille génératrice de E :card(G)>dimE
G est une base⇔ card(G) = dimE
• Base de E × Fsi (ai)16i6n et (bj)16i6m sont des bases respectives de E et F , alors
((ai, 0F )16i6n, ((0E, bj)16i6m)
constitue une base de E × Fdim(E × F ) = dim(E) + dim(F )
• Base de L(E,F )si (ai)16i6n et (bj)16i6m sont des bases respectives deE et F , alors la famille des application (ui,j) 16i6n
16j6mdéfinies par
∀i ∈ 1..n ,∀j ∈ 1..m ,∀k ∈ 1..n , ui,j(ak) = δi,kbjest une base de L(E,F ) et l’application f définie par
∀i ∈ 1..n , f(ai) =m
k=1
λk,ibk
admet dans cette base l’expression
f =m
k=1
n
i=1
λk,iui,k
En particulierdim(L(E,F )) = dim(E)× dim(F )
• Dual E∗ de E
L(E,K) = E∗ est le dual de Eles éléments de E∗ sont les formes linéaires
dim(E∗) = dim(E)
• Formes linéaires coordonnéesSoit (ai)16i6n une base de E . Tout vecteur x de E s’écrit de façon unique sous la forme x = n
i=1 xiai.
53 lycée Dessaignes 2005-2006

Pour un indice i fixé , l’application
e∗i :E → Kx → xi
s’appelle la iemeforme coordonnéee∗i ∈ E∗ (e∗i )16i6n est une base du dual de E
Par exemple si E = R4, et si ( ei)16i64 est la base canonique de E, alors pour x = (1,−2, 3,−4) ,e∗1(x) = 1, e
∗2(x) = −2, e∗3(x) = 3, e∗4(x) = −4
Si l’on considère l’application
ϕ :E −→ Kx = (x1, x2, x3, x4) 7−→ x1 − x3 + 2x4
alors ϕ est une forme linéaire etϕ = e∗1 − e∗3 + 2e∗4
11.1.3 Dimension d’un sous-espace vectoriel
• Tout sous-espace vectoriel F d’un espace vectoriel de dimension finie E est lui même de dimension finie ,de plus
dimF6dimE et dimF = dimE ⇔ F = E
• Rang d’une famille de vecteursSoit (ai)i∈1,..,p une famille de p vecteurs de E. Le rang de cette famille est la dimension du sous-espace
V ect((ai)16i6p) qu’elle engendrerg((ai)i∈1,..,p) = dim[V ect((ai)16i6p)]
rg((ai)i∈1,..,p) ≤ min(p, dimE)rg((ai)i∈1,..,p) = p⇔ (ai)i∈1,..,p est librerg((ai)i∈1,..,p) = dim(E)⇔ (ai)i∈1,..,p est génératrice
• Supplémentaires en dimension finiesiE est de dimension finie, tout sous espace F deE possède des sous-espaces vectoriels supplémentaires
G . De plus
F ⊕G = E ⇔ F +G = Edim(F ) + dim(G) = dim(E)
⇔ F ∩G = 0Edim(F ) + dim(G) = dim(E)
Attention, la notion algèbrique de supplémentaire ne doit absolument pas être confondue avec la notionensembliste de complémentaire. Par exemple si l’on considère l’espace E = R2 rapporté à sa base canon-ique, le sous espace F = V ect(e1) admet une infinité de sous espaces supplémentaires G = V ect(u) ( ilest nécéssairement de dimension 1), il suffit de choisir un vecteur u non colinéaire à e1 de telle sorte queV ect(e1) ∩ V ect(u) = 0E
• Formule de Grassmanndim(F +G) = dim(F ) + dim(G)− dim(F ∩G)
11.1.4 Rang d’une application linéaire
• Soit u ∈ L(E,F ) et S un supplémentaire de ker(u) dans E. Alors la restriction de u à S établit un isomor-phisme de S dans Im(u)
ker(u)⊕ S = U ⇒ u|S ∈ Isom(S, Im(u))
• Théorème du rangdim(ker(u)) + dim(Im(u)) = dim(E)
54 lycée Dessaignes 2004-2005

• Rang d’une application linéairerg(u) = dim(Im(u)
rg(u) + dim(ker(u)) = dim(E)
rg(u) ≤ min(dim(E), dim(F ))rg(u) = dim(E) ⇔ u injectiverg(u) = dim(F ) ⇔ u surjective
• Eléments inversibles de L(E)Soit u ∈ L(E) un endomorphisme de E
u est un automorphisme de E ⇔ keru = 0E ⇔ rg(u) = dim(E)
• Groupe linéaire GL(E)GL(E) = u ∈ L(E), u inversible
(GL(E), o) est un groupe
• Homothéties de rappport λ 6= 0On nomme ainsi l’application λ.IdE : x→ λxL’ensemble des homothéties est un sous-groupe de GL(E)
• Affinité de base F de direction G et de rapport λSoient F,G deux sous-espaces vectoriels supplémentaires dans E : F ⊕G = E. L’affinité de base F de
directionG et de rapport λ est l’application qui au vecteur x = xF +xG associe le vecteur f(x) = xF +λxG
x = xF + xG → f(x) = xF + λxG
f = pF + λ.pGoù pF et pG sont les projecteurs associés à F et G
• Cas particulier de la symétrie par rapport à F et de direction GIl s’agit de l’application
x = xF + xG → s(x) = xF − xGs = pF − pG = 2pF − IdE = IdE − 2pGs2 = IdE
• Caractérisation des symétriesSoit f ∈ L(E) telle que
f2 = IdEAlors
ker(f − IdE)⊕ ker(f + IdE) = Ede plus f est la symétrie par rapport au sous-espace ker(f − IdE) de ses vecteurs invariants , et de directionle sous-espace ker(f + IdE) des vecteurs transformés en leur opposé.D’autre part si l’on note p la projection sur ker(f − IdE) dans la direction de ker(f + IdE)
s = 2p− IdE
55 lycée Dessaignes 2005-2006

symétrie vectorielleExercice21: Soit f l’application linéaire de R3 dans R4 telle que
f((x, y, z)) = (x+ y, x+ z,−x+ y − 2z, 2x− y + 3z)Déterminer rg(f) et une base de ker f , Im f
11.2 Calcul matriciel
11.2.1 Opérations sur les matrices
• Une matrice n à lignes et p colonnes dans le corps K est une application de 1, .., n × 1, .., p à valeursdans K . On la note
M = (mi,j)16i6n16j6p
Mn,p(K) est l’ensemble de ces matrices.(Mn,p(K),+, .) est un K espace vectoriel lorsqu’il est muni des lois usuelles( voir l’ensemble des applications deX dans E : F(X,E), ici X = 1, .., n × 1, .., p et E = K)
• Base canonique deMn,p(K)Soit (i, j) ∈ 1, .., n×1, .., p .On noteEi,j la matrice qui admet un 1 en position (i, j) et des 0 ailleurs
. On a donc∀(k, l) ∈ 1, .., n × 1, .., p , (Ei,j)k,l = δi,kδk,l
(Ei,j)k,l désignant le terme d’indice (k, l) de la matice Ei,j et δ le symbole de kroneckerdim(Mn,p(K)) =np
• Produit matricielSoit A = (ai,j)16i6n
16j6p∈Mn,p(K) et B = (bi,j)
16i6p16j6q
∈Mp,q(K)
On définit C = AB ∈Mn,q(K) par C = (ci,j)16i6n16j6q
avec
∀(i, j) ∈ 1, .., n × 1, .., q , ci,j =p
k=1
ai,kbk,j
Par exemple
a0 b0 c0
d0 e0 f 0 ×a bc de f
=a0a+ b0c+ c0e a0b+ b0d+ c0fd0a+ e0c+ f 0e d0b+ e0d+ f 0f
21 dans l’ordre on trouve ker f = V ect(e1 − e2 − e3), on en déduit que 1 + rg(f) = 3 donc que rg(f) = 2 donc Im(f) =V ect(f(e1), f(e2), f(e3)) est un sous espace vectoriel deR4 de dimension 2 engendré par la famillle libre ( f(e1) = (1, 1,−1, 2),f(e2) =(1, 0, 1,−1)). Noter que l’on remarque que f(e1 − e2 − e3) = 0⇒ f(e3) = f(e1)− f(e2)
56 lycée Dessaignes 2004-2005

a bc de f
× a0 b0 c0
d0 e0 f 0 =a0a+ d0b ab0 + be0 ac0 + bf 0
ca0 + dd0 b0c+ e0d cc0 + df 0
ea0 + fd0 eb0 + fe0 c0e+ f 0f
• Isomorphisme canonique entreMn,p(K) et L(Kp,Kn)(Ndlr: c’est sans doute le point le plus important à comprendre en algèbre linéaire )Soit f ∈ L(Kp,Kn): on note B =(ej)16i6p la base canonique de Kp et C =(εi)16i6n celle de Kn. On
appelle matrice de f de la base B dans la base C la matriceM = (mi,j)16i6n
16j6pdont les coefficients sont définis par
∀j ∈ 1, .., p , f(ej) =n
i=1
mi,jεi
M =
m1,1 . . . . . . m1,p...
......
...mn,1 . . . . . . mn,p
Soit x = pj=1 xjej un vecteur de Kp: on noteX =
x1x2...xp
∈Mp,1(K), que l’on identifiera à x. Dans
ce cas f(x) = ni=1 yiεi image de x par f est identifiée au vecteur colonne Y =
y1y2...yn
∈Mn,1(K). On
a alorsMX = Y
m1,1 . . . . . . m1,p...
......
...mn,1 . . . . . . mn,p
×
x1x2...xp
=
y1y2...yn
Exercice22 Déterminer la matrice de l’application linéaire f de R3 dans R2 définie parf((a, b, c)) = (a+ b,−a+ b+ c)
• AlgèbreMn(K) des matrices carréeson noteMn(K) =Mn,n(K) .Le produit matriciel × définit une loi de composition interne dansMn(K)(Mn(K),+,×, .) est une K algèbre, en général non commutative et non intègre (sauf si n = 1)par exemple
1 21 2
× 1 −11 −1 =
3 −33 −3
1 −11 −1 × 1 2
1 2=
0 00 0
22 mat(f) =
µ1 1 0−1 1 1
¶57 lycée Dessaignes 2005-2006

L’élément unité est la matrice
In =
1 0 . . . 0
0 1 0...
... 0. . . 0
0 . . . 0 1Une matrice est dite scalaire si elle est de la forme λIn : Les matrices scalaires forment un sous espace
vectoriel deMn(K) de dimension 1 , stable pour × (sous algèbre)Une matrice est dite diagonale si elle est de la forme
M =
a1,1 0 . . . 0
0 a2,2 0...
... 0. . . 0
0 . . . 0 an,nLes matrices diagonales forment un sous espace vectoriel deMn(K) de dimension n, stable pour× (sous
algèbre)une matrice est dite triangulaire supérieure si elle est de la forme
M =
a1,1 a1,2 . . . a1,n
0 a2,2...
... 0. . . an−1,n
0 . . . 0 an,n
Les matrices triangulaires supérieures forment un sous espace vectoriel deMn(K) de dimensionn(n+ 1)
2,
stable pour × (sous algèbre)Exercice 23. Montrer que le produit de deux matrices de Mn(K) triangulaires supérieures est triangulaire
supérieure
• Matrices inversibles , Groupe linéaireSoitM ∈ Mn(K). M est inversible ssi elle admet un inverse pour la loi × , c’est à dire s’il existe une
matriceM−1 telle queMM−1 =M−1M = In
L’ensemble des matrices inversibles deMn(K) forme un groupe pour le produit matriciel , appelé groupelinéaire
GLn(K)
1 23 4
−1=
−2 132−12
1 21 2
/∈ GL2(R)
• TranspositionSoitM ∈Mn,p(K) . On note tM ∈Mp,n(K) la matrice telle que
∀(i, j) ∈ 1, .., p × 1, .., n , (tM)i,j =Mj,i
t(AB) = tB tAt(λA+ µB) = λtA+ µtB
• Cas particulier des matrices colonnes
23 soitM = (mi,j) et N = (ni,j) vérifiant : i > j ⇒ mi,j = ni,j = 0. Posons C = MN. Soient i, j deux indices tels quei > j. On a ci,j =
Pnk=1mi,knk,j = 0 car si k < i alorsmi,k = 0 et si k ≥ i alors k > j et donc nk,j = 0
58 lycée Dessaignes 2004-2005
Si X =
x1x2...xp
, alors tX = x1 x2 . . . xp
en particulier si X =
x1x2...xp
et Y =
y1y2...yp
tY X = y1 y2 . . . yp ×
x1x2...xp
=
p
k=1
xiyi ∈ K
Remarque : XtY =
x1x2...xp
× y1 y2 . . . yp =
x1y1 x1y2 . . . x1yp... x2y2
...xp−1y1
... . . . xp−1ypxpy1 xpy2 . . . xpyp
en colonnes on obtient XtY = y1X y2X . . . ypX
• Matrices carrées symétriques , antisymétriquesSoitM ∈Mn(K). M est symétrique (resp antisymétrique) si et seulement si tM =M (resp tM = −M
)Sn(K) = M ∈Mn(K),M = tM ,An(K) = M ∈Mn(K),−M = tM
dim(Sn(K)) =n(n+ 1)
2, dim(An(K)) =
n(n− 1)2
M =M + tM
2+M − tM
2Sn(K)⊕An(K) =Mn(K)
11.3 Matrices et applications linéaires
• Matrice d’une application linéairesoit u ∈ L(E,F ) et B =(ej)16j6p une base de E, C =(εi)16i6n une base de FOn appelle matrice de u de la base B dans la base C la matrice
matB,C(u) = (mi,j)16i6n16j6p
dont les coefficients sont définis par
∀j ∈ 1, .., p , u(ej) =n
i=1
mi,jεi
matB,C(u) =
m1,1 . . . . . . m1,p...
......
...mn,1 . . . . . . mn,p
soit x = pj=1 xjej est un vecteur de E, on note
X = matB(x) =
x1x2...xp
∈Mp,1(K)
59 lycée Dessaignes 2005-2006

que l’on identifiera à x. Dans ce cas u(x) = ni=1 yiεi, image de x par u, est identifiée au vecteur colonne
Y = matC(u(x)) =
y1y2...yn
∈Mn,1(K)
On a alorsmatB,C(u)×matB(X) = matC(u(x))
m1,1 . . . . . . m1,p...
......
...mn,1 . . . . . . mn,p
×
x1x2...xp
=
y1y2...yn
Exercice24 Déterminer la matrice de l’application linéaire f de R2[X] dans R3[X] définie parf(P ) = XP (X + 1)
lorsque l’espace de départ et l’espace d’arrivée sont rapportés aux bases canoniques
• Matrice de la composée de deux applications linéaires.Soit u ∈ L(E,F ), v ∈ L(F,G) et E =(ek)16k6p une base de E, E 0 =(e0j)16j6q une base de F, et
E” =(e”i)16i6n une base de G. On a la formulematE,E”(vou) = matE0,E”(v)×matE,E0(u)
en effet : si x ∈ E,matE”(v [u(x)]) = matE 0,E”(v)×matE 0(u(x)) = matE0,E”(v)×matE,E0(u)×matE(x)
or par définitionmatE”(v [u(x)]) = matE,E”(vou)×matE(x)
En identifiant les deux relations , et du fait que cette égalité a lieu pour tout vecteur x ∈ E on en déduitle résultat.
• Matrice d’un endomorphismesoit u ∈ L(E) et B =(ej)16i6n une base de EOn appelle matrice de u dans la base B la matrice matB(u) = (mi,j)16i6n
16j6ndont les coefficients sont
définis par
∀j ∈ 1, .., n , u(ej) =n
i=1
mi,jei
matB(u) =
m1,1 . . . . . . m1,n...
......
...mn,1 . . . . . . mn,n
∀(u, v) ∈ L(E)2, matB(uov) = matB(u)×matB(v)∀u ∈ GL(E), matB(u
−1) = matB(u)−1
∀(λ, u) ∈ K×L(E), matB(λ.u) = λ. matB(u)
∀(n, u) ∈ N×L(E), matB(un) = matB(u)n
• Matrices de passagesSoient B =(ei)16i6n , B0 =(e0j)16j6n deux bases de E. On appelle matrice de passage de la base B
24 mat(f) =
0 0 01 1 10 1 20 0 1
60 lycée Dessaignes 2004-2005

à la base B0 la matrice PB,B0 ∈ Mn(K) dont la jieme colonne exprime les coordonnées de e0j dans la base(ei)16i6n. C’est aussi la matrice de l’identité de E lorsque l’espace E de départ est muni de la base B0 etl’espace E d’arrivée de la base B;
PB,B0 = (αi,j)16i6n16j6n
⇔ ∀j ∈ 1, .., n , e0j =n
k=1
αk,jek
Si X = matB(x) et X 0 = matB0(x) et P = PB,B0 alorsX = PX 0
PB,B0 ∈ GLn(K) et (PB,B0)−1 = PB0,BPB,B0 × PB0,B” = PB,B”
Exemple: B = (e1, e2) est la base canonique de R2 : former l’équation de l’hyperbole 4x21 − x22 = 1dans le repère centré en 0 et de base
B0 = (e1 − 2e2, e1 + 2e2)
PB,B0 =1 1−2 2
; soit x = x1e1 + x2e2 = x01e01 + x02e02, un vecteur quelconque décomposé dans la
base B et dans la base B0 : d’après les formules de changement de base:
X = PX 0 ⇔ x1 = x01 + x
02
x2 = −2x01 + 2x024x21 − x22 = 1⇔ 4(x01 + x
02)2 − (−2x01 + 2x02)2 = 1
4x21 − x22 = 1⇔ 16x01x02 = 1
On retrouve un résultat classique de géomètrie , à savoir que dans un repère dont les axes sont les asymp-totes d’une hyperbole H, les points de cette hyperbole sont caractérisés par le fait que le produit de leurscoordonnées est constant
x 10.50-0.5-1
y
2
1
0
-1
-2
hyperbole rapportée à ses asymptotes
• Effet d’un changement de base sur la matrice d’une application linéaireSoit u ∈ L(E,F ) etB = (ej)16i6p , B0 = (ej)16i6p deux bases de E,C = (εi)16i6n , C 0 = (ε0i)16i6n deux bases de F
matB0,C0(u) = PC0,C ×matB,C(u)× PB,B0
• Effet d’un changement de base sur la matrice d’un endomorphismesi u ∈ L(E) et si B = (ej)16i6n , B0 = (ej)16i6n sont deux bases de E , en notant P = PB,B0 , on a la
formulematB0(u) = P
−1 ×matB(u)× P
11.4 Opérations élémentaires sur les matrices
61 lycée Dessaignes 2005-2006

• M ∈Mn,p(K) est une matrice quelconque , que l’on écrira
M =
L1...Ln
ouM = (C1, ..Cp)
selon que l’on travaille en lignes(Li) ou en colonnes (Cj)le codage L1 ← L1 + L2 signifie par exemple: remplacer L1 par L1 + L2
• Opérations élémentaires sur les lignesVoici la liste des opérations élémentaires sur les lignes et leurs trancriptions en termes de produits ma-
triciels
– ajouter à la ligne Li la ligne λLj , j 6= iLi ← Li + λLj
M ← Πn,λ,i,j ×Moù Πn,λ,i,j = In + λEi,j est la matrice n × n dont la diagonale est constituée de 1 et qui a un λ en
position (i, j), des 0 ailleurs
– permuter Li et Lj , j 6= iLi ↔ Lj
M ← Θn,i,j ×Moù Θn,i,j est la matrice In dans laquelle on a permuté la ligne i et la ligne j
– multiplier la ligne Li par λLi ← λLi
M ← Ωn,i,λ ×Moù Ωn,i,λ est la matrice In dans laquelle on a multiplié la iiemeligne par λ
• Opérations élémentaires sur les colonnesVoici la liste des opérations élémentaires sur les colonnes et leurs trancriptions en termes de produits
matriciels
– ajouter à la colonne Cj la colonne λCi, j 6= iCj ← Cj + λCi
M ← M ×Πp,λ,i,joù Πp,λ,i,j = Ip + λEi,j est la matrice p × p dont la diagonale est constituée de 1 et qui a un λ en
position (i, j), des 0 ailleurs
– permuter Cj et Ci , j 6= iCi ↔ Cj
M ← M ×Θp,i,j
où Θp,i,j est la matrice Ip dans laquelle on a permuté la colonne i et la colonne j
– multiplier la colonne Cj par λCj ← λCj
M ← M × Ωp,j,λoù Ωp,i,λ est la matrice Ip dans laquelle on a multiplié la jieme colonne par λ
• Interêt de ces opérations.suppposons que l’on effectue sur la matrice M ∈ Mn(K) des opérations élémentaires en ligne , et que
l’on aboutisse à l’issue de ces opérations à la matrice In, cela s’interprète matriciellement comme une séried’opérations × à gauche par des matrices de transformations notées pour simplifier Ti d’ou
Tq × Tq−1 × ...T1 ×M = In
62 lycée Dessaignes 2004-2005

DoncM−1 = Tq × Tq−1 × ...T1
C’est la méthode de Gauss pour obtenir l’inverse d’une matrice carrée, pour obtenir Tq × Tq−1 × ...T1,il suffit d’effectuer sur In les mêmes opérations que l’on a effectuées surM ( en effet Tq × Tq−1 × ...T1 =Tq × Tq−1 × ...T1 × In)Le même raisonnement vaut en colonnes (attention: pas de mélange ligne-colonne )
11.5 Rang d’une matrice
• Le rang d’une matriceM ∈ Mn,p(K) est le rang de l’application linéaire f canoniquement associée àM .C’est aussi le rang des vecteurs colonnes de la matriceM
• Le rang d’une matriceM est invariant par application des opérations élémentaires . En particulier on peutajouter à une ligne (resp une colonne) une combinaison linéaire des autres lignes (resp des autres colonnes)sans changer le rang de la matriceM .Attention ceci est une recette qui permet de simplifier la matrice pour en lire le rang , les matrices
intermédiaires obtenues dans ce calcul n’ont aucun lien direct avec l’application linéaire f associée àM .
•rg(M) = rg(tM)
Si U est inversible rg(UM) = rg(M)
Si V est inversible rg(MV ) = rg(M)
• On note Jr ∈ Mn,p(K) la matrice dont le bloc supérieur gauche r × r est Ir et tous les autres coefficientssont nuls . On a alors le critère
rg(M) = r⇔ ∃(U, V ) ∈ GLn(K)×GLp(K), M = UJrV
ceci revient à dire que rg(M) = r si et seulement si il existe une baseB deKp et une base C deKn tellesque, si f est l’application linéaire canoniquement associée àM ,
matB,C(f) = Jr =Ir 00 0
U et V s’interprètent comme des matrices de passage.
Exercice 25: déterminer le rang de la matrice A =1 2 a1 1 12 a 1
où a ∈ C.
11.6 Systèmes d’équations linéaires
• Un système linéaire (S) de n équations à p inconnues est la donnée de n(p + 1) scalaires (ai,j)16i6n16j6p
et
(bi)16i6n .
25 à l’aide des opérations élémentaires suivantesL2 ←− L2 − L1, L3 ←− L3 − 2L1,
L3 ←− L3 + (a− 4)L2 on trouve que la matrice A est équivalente à la matrice A0 =
1 2 a0 −1 1− a0 0 −a2 + 3a− 3
dont lerang est égal à 2 si a =
3± i√3
2, et à 3 dans tous les autres cas
63 lycée Dessaignes 2005-2006

Les p inconnues sont x1, .., xp et appartiennent au corps K
(S) :
a1,1x1 + ...+ a1,pxp = b1a2,1x1 + ...+ a2,pxp = b2
...an,1x1 + ...+ an,pxp = bn
Le système homogène associé est : (H) :
a1,1x1 + ...+ a1,pxp = 0a2,1x1 + ...+ a2,pxp = 0
...an,1x1 + ...+ an,pxp = 0
Résoudre (S) ,c’est trouver tous les p− uplets : x = (x1, .., xp) qui le vérifient
• On noteA = (ai,j)16i6n16j6p
la matrice principale du système et f l’application linéaire canoniquement associéeà A.
On note b = (b1, .., bn), et B = mat(b) =
b1b2...bn
le second membre
On note X = mat(x) =
x1x2...xn
l’inconnue sous forme vectorielle
(remarque : interprèter un système commme ayant une inconnue dans Kp et non p inconnues dans Kc’est toute la force de l’algèbre linéaire.)L’équation se traduit alors par
(S)⇔ AX = B ⇔ f(x) = b
• Résolution de (S)– Le système (S) admet au moins une solution si et seulement si b ∈ Im(f)– les solutions de (S) s’obtiennent en ajoutant à une solution particulière de (S) l’ensemble de toutes lessolutions de (H)
– Les solutions de (H) constituent le noyau de f et donc forment un sous-espace vectoriel de E. Ce sousespace est de dimension p− rg(A)
– Pratiquement , on peut utiliser la méthode du pivot de Gaus pour transformer S en un autre systèmeéquivalent et plus simple. Il s’agit en fait de transformer le système en un système dont la matriceprincipale est triangulaire supérieure et de remonter les équations
• Systémes de CramerUn système est dit de Cramer lorsque n = p = r , c’est à dire qu’il a autant d’équations que d’inconnues
et que le rang de la matrice principale du sytème est égal à la taille de cette matriceLorsqu’un système est de Cramer , il possède une unique solution.
Exemple: Résoudre le systèmex+ y = 1y + z = 1x+ az = 1
, où a est un paramètre réel,
(S) est de cramer si et seulement si a 6= −1 et si a = −1 il est incompatible ( il n’y a pas de solutions).
En effet la suite d’opérations élémentaires : L3 ← L3 − L1;L3 ← L3 + L2 aboutit àx+ y = 1y + z = 1(1 + a)z = 1
donc si a 6= −1, z = 1
1 + a, y =
a
1 + a, x =
1
1 + asi a = −1 , la dernière équation est impossible.
64 lycée Dessaignes 2004-2005

11.7 Déterminants
11.7.1 Forme n-linéaire symétrique, antisymétrique , alternée
• SoitE un espace vectoriel surK et n un entier naturel non nul. On munitEn de sa structure d’espace produit. Soit f une application de En à valeurs dans K
f :En → K(x1, .., xn) 7→ f((x1, .., xn))
Par exemple on peut prendre E = K , et considérer l’application qui au n−uplet (x1, x2, .., xn) associef((x1, x2., xn)) = x1x2..xn
– f est n− lineaire si elle est linéaire par rapport à x1, et à x2, .., et à xn(c’est le cas de l’exemple). On parle alors de forme n-linéaire
– f est symétrique si , lorsque l’on permutte deux indices i et j cela n’a pas de répercussion sur la valeurf((x1, x2., xn)) (c’est le cas de l’exemple)
– f est antisymétrique si , lorsque l’on permutte deux indices i et j cela transforme f((x1, x2., xn)) en sonopposé (ce n’est pas le cas de l’exemple)
– f est alternée si , lorsque deux coordonnéesxi etxj d’indices distincts sont égales, alors f((x1, x2., xn)) =0 (ce n’est pas le cas de l’exemple)
• Lorsque le corps de base est égal à Q,R où C,f est antisymetrique⇔ f est alternee
11.7.2 Déterminant de n vecteurs dans une base B
• Soit E un K espace vectoriel de dimension n. On note Λn(E) l’espace vectoriel des formes n−linéairesalternées sur E
dim(Λn(E)) = 1
• Soiet B = (ai)1≤i≤n une base de E. On appelle déterminant en base B noté detBl’unique forme n-linéaire
alternée sur E qui vérifiedetB(a1, ..., an) = 1
si (xj = ni=1 xi,jai)1≤j≤n ∈ En alors
detB(x1, .., xn) =
σ∈Snε(σ).x1,σ(1).x2,σ(2)...xn,σ(n)
par exemplen = 2 : det
B(x1, x2) = x1,1x22 − x1,2x2,1
n = 3 : detB(x1, x2, x3) = x1,1x2,2x3,3+x2,1x1,3x3,2+x3,1x1,2x2,3
−x1,1x2,3x3,2−x2,1x1,2x3,3−x3,1x1,3x2,2Cette formule se retient sous le nom de règle de Sarrus
par exemple avec cette règle det1 2 a1 1 12 a 1
= 1 + 4 + a2 − 2a− 2− a = a2 − 3a+ 3 (attention la
règle de Sarrus ne fonctionne que pour n = 3)
• Famille liée : Une famille de vecteurs est liée ssi son déterminant dans une base (quelquesoit cette base) estnul
(x1, .., xn) liée ⇔ detB(x1, .., xn) = 0
65 lycée Dessaignes 2005-2006

par exemple on retrouve que le rang de A =1 2 a1 1 12 a 1
est strictement inférieur à 3 ssi a2−3a+3 = 0
• Effet d’une permutation des vecteurs∀σ ∈ Sn, det
B(xσ(1), ..., xσ(n)) = ε(σ) det
B(x1, .., xn)
• Transformations élémentairesLorsque l’on permute deux vecteurs , on multiplie le déterminant par −1Lorsque l’on ajoute à un vecteur une combinaison linéaire des autres vecteurs , on ne modifie pas la
valeur du déterminant.Lorsque l’on multiplie un vecteur par λ , le déterminant est multiplié par λExemple : Soit ( xj)1≤j≤n ∈ En une famille de n vecteurs. Exprimer
D = detB(i6=1xi,
i6=2xi, ..,
i6=nxi)
en fonction de detB(x1, .., xn).
notons s = ni=1 xi. On aD = det
B(i6=1xi,
i6=2xi, ..,
i6=nxi) = det(s− x1, s− x2, .., s− xn)
développons ce déterminant par n− linearite: on obtient 2 n termesdet(s− x1, .., s− xn) = det(s, .., s) + det(−x1, .., s) + .....+ det(−x1, ..,−xn)dans cette somme , dès que le vecteur s apparait au moins deux fois dans un déterminant , celui ci est
nul. Donc il ne reste plus qu’une somme de n+ 1 déterminants :D = det(s,−x2, , ..,−xn) + det(−x1, s,−x3, , ..,−xn)..+ det(−x1,−x2, , .., s)
+det(−x1,−x2, , ..,−xn)d’autre part en ajoutant à s la somme −x2 − ..− xn de tous les autres vecteurs on obtient:
det(s,−x2, , ..,−xn) = det(x1,−x2, ..,−xn)DoncD = n(−1)n−1 det(x1, x2, .., xn) + (−1)n det(x1, .., xn) = (n− 1)(−1)n−1 det(x1, x2, .., xn)
• Caractérisation des basessoit B0 = (e0l)1≤j≤n une famille de n vecteurs de E
B0 est une base de E ⇔ detB(B0) 6= 0
11.7.3 Déterminant d’un endomorphisme
• Soit u ∈ L(E) et B = (ai)1≤i≤n une base de E.detB(u) = det(u(a1), .., u(an))
ce scalaire est indépendant de la base B et se note det(u)∀(u, v) ∈ L(E)2, det(uov) = det(u) det(v)
u ∈ GL(E)⇔ det(u) 6= 0
∀u ∈ GL(E), det(u−1) =1
det(u)
• Effet d’une application linéaire sur un déterminantSoit (xj)1≤j≤n ∈ En une famille de n vecteurs de E et f ∈ L(E).
detB(f(x1), f(x2), ..., f(xn)) = det(f)× det
B(x1, x2, ..., xn)
• Soit A ∈ Mn(K) on appelle det(A) le déterminant de l’endomorphisme canoniquement associé à A =
66 lycée Dessaignes 2004-2005

(ai,j)1≤i,jndet(AB) = det(A) det(B)
det(λ.A) = λn det(A)
det(tA) = det(A)
det(A) =σ∈Sn
ε(σ).a1,σ(1).a2,σ(2)...an,σ(n)
• ComatriceSoit (i, j) ∈ 1, .., n2 . On noteDi,j le déterminant de la matriceAi,j obtenue en supprimant la iieme ligne
et la jiemecollone de A. Le cofacteur de ai,j est (−1)i+jDi,j. La comatrice de A est la matrice Com(A)des cofacteurs, définie par com(A)i,j = (−1)i+jDi,j
Com(A) = ((−1)i+jDi,j)1≤i,j≤nA× tCom(A) = tCom(A)×A = det(A)Insi det(A) 6= 0, A−1 = 1
det(A)
t
Com(A)
• Formules de CramerSoit (S) AX = B un système de n équations à n inconnues de matrice A = [C1, .., Cn]
(S) est de Cramer⇔ det(A) 6= 0
dans ce cas si X =
x1x2...xn
on a les formules de Cramer
∀i ∈ 1, .., n , xi =det([C1, ., Ci−1, B, Ci+1., Cn])
det(A)
Exercice 26: Résoudre le système linéaire cos θ.x+ sin θ.y = a− sin θ.x+ cos θ.y = b à l’aide des formules de Cramer
12 Géomètrie Affine
12.1 Translations , sous-espaces affines
E est un R espace vectoriel: ses éléments seront appelés indifféremment points ou vecteurs.Lorsque E est considéré comme un ensemble de points , c’est le point de vue affine. Dans ce cas les élémentsde E sont notés A,B,C, ...,M,N, P et il peut même être commode de noter E autrement (par exemple E )Lorsque E est considéré comme un ensemble de vecteurs c’est le point de vue vectoriel . Dans ce cas leséléments de E sont notés −→a ,
−→b ,−→c , ...,
−→m,−→n ,−→p
Evidemment puisque les deux points de vues sont possibles, un point et un vecteur c’est à priori la même chose .En fait la dualité points/vecteurs repose essentiellement sur l’existence d’une application définie canoniquement
de E ×E dans E ( il faudrait d’ailleurs dire de E × E dans E ) par Φ :E × E → E
(A,B) 7→−→AB =
−→B −
−→A
c’est ainsi que l’on définit le vecteur−→AB d’origine a et d’extrémité b
l’application Φ est telle que pour tout vecteur −→x ∈ E , et pour tout point A ∈ E , il existe un seul point B ∈ Etel que
−→AB =
−→x : ce point est défini par B = A+−→x
26 det(A) = 1 6= 0 donc le sytème est de Cramer. x =
¯a sin θb cos θ
¯detA
= a cos θ − b sin θ et y =
¯cos θ a− sin θ b
¯detA
= b cos θ +
a sin θ. Bien sûr on peut résoudre directement par combinaison linéaire , ou même par substitution , a condition de discuter sur θ,mais l’interêt de cette méthode est qu’il n’y a pas à réflèchir , on applique bêtement.
67 lycée Dessaignes 2005-2006

cette notation permet donc d’ajouter un point A et un vecteur −→x
• Translations d’un espace vectorielSoit −→x ∈ E. La translation de vecteur −→x est l’application t−→x de E dans lui même définie par
t−→x :M 7→M 0 =M +−→x
On a doncM 0 = t−→x (M)⇔
−−−→MM 0 = −→x
Par exemple , si H = V ect(sin, cos) est le sous espace vectoriel des solutions de l’équation différen-tielle y” + y = 0 , engendré par les deux fonctions sin, cos et B l’ensemble des solutions de l’équationdifférentielle y” + y = x, on a en notant id l’application définie sur R par id(x) = x , B = A + id =f ∈ RR,∃(a, b) ∈ R2,∀x ∈ R, f(x) = a sinx+ b cosx+ x
• Sous-espace affineSoit F un sous espace vectoriel de E et A ∈ E un point donné . On appelle sous espace affine passant
par A et dirigé par F la partieW notée A+ F définie parW = A+ F = M ∈ E ,∃−→x ∈ F,M = A+
−→x
par exemple si F = V ect(sin, cos) est le sous espace vectoriel de E =RR formé des solutions de l’équa-tion différentielle y”+ y = 0 , qui est engendré par les deux fonctions ( sin, cos) et W l’ensemble des solu-tions de l’équation différentielle y” + y = x, on a en notant id l’application définie sur R par id(x) = x,
W = id+ F = f ∈ RR,∃(a, b) ∈ R2,∀x ∈ R, f(x) = a sinx+ b cosx+ xW est donc le sous espace affine de E passant par le point id ( eh oui ici la fonction x→ x est considèrée
comme un point de l’espace ) et dirigé par W .Autre exemple: la droite W deR2 d’équation x+y+1 = 0 est le sous espace affine de E =R2 passant
par le point A = (0,−1) (par exemple) et dirigé par le sous espace vectoriel F de R2 : F = vect(e1− e2)
x 420-2-4
y
4
2
0
-2
-4
x+y+1=0 de direction x+y=0la dimension deW = A + F est définie comme égale à la dimension de F : en particulier si F = 0,
W est un point (dimW = 0) , si dimW = 1 ,W est une droite, si dimW = 2 ,W est un plan. Au delà ,on utilise le terme général de sous-espace affineE est bien entendu un sous-espace affine de lui même.On appelle vecteurs directeurs de A+ F toute famille de vecteurs qui constitue une base de FPar exemple les fonction sin, cos sont des vecteurs directeurs du sous espace affine des solutions de
y” + y = x , et le vecteur e1 − e2 est un vecteur directeur de la droite affine d’équation x+ y + 1 = 0
• Unicité de la direction d’un sous espace affinesiW = A+ F alors ∀B ∈W ,W = B + F
• Sous-espaces affines parallèlesSoientW etW 0 deux sous espaces affines de E . Par définitionW est parallèle àW 0 si et seulement si la
direction deW est incluse dans la direction deW 0 , c’est a dire s’il existe deux points A et A0 de E et deuxsous-espaces vectoriel F, F 0 de E tels que
W = A+ F etW 0 = A0 + F 0 et F ⊆ F 0
68 lycée Dessaignes 2004-2005

par exemple si W et W 0 sont les deux sous-espaces affines de R3 d’équations respectives x+y+z+1 = 0
et x+ y = 0z = 1
, W est le plan passant par A(0, 0,−1) et de vecteurs directeurs ( e1 − e2, e2 − e3) , etW 0 la droite passant par A0(0, 0, 1) et de vecteur directeur e1 − e2. W 0 est donc parallèle à Wsi W 0 et W ont la même direction ils sont dit fortement parallèles : c’est la notion de parallèlisme
classique ( par exemple dans R3droites parallèles , plans parallèles )
• Intersection de deux sous-espaces affinesSoientW,W 0 deux sous espaces affines de E de directions respectives F, F 0 . Alors ou bienW ∩W 0 = ∅,
ou bienW ∩W 0 est lui même un sous-espace affine de E : dans ce second cas , la direction deW ∩W 0 estégale à F ∩ F 0En particulier supposons que E =R3: les règles d’incidences sont les suivantesA) siW etW 0 sont des plans :
A1)W etW 0 sont fortement parallèles: dans ce cas ou bienW =W 0 ou bienW ∩W 0 = ∅A2)W etW 0 ne sont pas fortement parallèles et alorsW ∩W 0 est une droite.
B) siW est un plan etW 0 une droite:B1)W 0 est parallèle àW : dans ce cas ou bienW 0 ⊆W ou bienW ∩W 0 = ∅B2) W 0 n’est pas parallèle àW : dans ce casW ∩W 0 est un point
C) siW etW 0 sont des droitesC1)W etW 0 sont coplanaires ( incluses dans un même plan) : dans ce cas il y a deux sous-cas
C1a) siW etW 0 sont fortement parallèles et alors ou bienW =W 0 ou bienW ∩W 0 = ∅C1b) siW etW 0 ne sont pas parallèlles, alors elles sont sécantes en un point .
C2)W etW 0 ne sont pas coplanaires. dans ce casW ∩W 0 = ∅Exemple: montrer plus généralement dans le cas ou n est quelconque que lorsque F ⊕ F 0 = E ( c’est à
dire le cas B2 ), alors W ∩W 0 est un point .En effet posons W = A+F et W 0 = A0+F 0 : Cherchons les points M ∈W ∩W 0. Soit M un tel point
:M ∈W ∩W 0 ⇔
−−→AM ∈ F et
−−−→A0M ∈ F 0
or−−→AA0 =
−−→AM −
−−→A0M . De plus, puisque F ⊕F 0 = E, le vecteur
−−→AA0 qui est élément de E se décompose
de façon unique sous la forme−−→AA0 = −→u +
−→u0 avec (−→u ,
−→u0 ) ∈ F × F 0
les deux vecteurs −→u et−→u0 sont donc déterminés de façon unique à l’aide de A et de A0 , et il est nécéssaire
d’avoir−−→AM =
−→u et
−−→MA0 =
−→u0 . Examinons la première de ces deux conditions : Il existe un et un
seul point M0 tel que−−→AM0 =
−→u .Montrons que ce point M0 vérifie aussi la deuxième condition: en effet−−−→
M0A0 = −u+
−−→AA0 =
−→u0 . On en déduit donc l’existence et l’unicité du point M .
12.2 Barycentres
• Définition du barycentre de n pointsSoient (Ai)1≤i≤n une famille de n points et (λi)1≤i≤n une famille de n scalaires réels tels que n
i=1 λi 6=0 ;Le barycentre de la famille (Ai)1≤i≤n affecté des masses (λi)1≤i≤n est le point G défini par
n
i=1
λi−−→GAi =
−→0
∀M ∈ E ,n
i=1
λi−−→MAi = (
n
i=1
λi−−→)MG
on ne modifie pas G en multipliant toutes les masses par un même réel λ 6= 0En particulier il est toujours possible de supposer n
i=1 λi = 1 en divisant chaque masse par la sommede toutes les massesNotation : G = bar((Ai)1≤i≤n,(λi)1≤i≤n)
69 lycée Dessaignes 2005-2006

• Associativité du barycentresoient G = bar((Ai)1≤i≤n,(λi)1≤i≤n), G0 = bar((A0i)1≤i≤n0 ,(λ
0i)1≤i≤n0) si
ni=1 λi +
n0i=1 λ
0i 6= 0 alors
G” = bar((Ai)1≤i≤n ∪ (A0i)1≤i≤n0, (λi)1≤i≤n ∪ (λ0i)1≤i≤n0) = bar((G,G0), (n
i=1
λi,n0
i=1
λ0i)
• Stabilité d’un sous-espace affine par barycentrationSoitW un sous espace affine de E . Soient (Ai)1≤i≤n une famille de n points deW et (λi)1≤i≤n une famille
de n scalaires réels tels que ni=1 λi 6= 0 , alors le barycentre G = bar((Ai)1≤i≤n,(λi)1≤i≤n) appartient à
W .
• Segment [A,B]
[A,B] = M ∈ E ,∃λ ∈ [0, 1], M = bar((A,B), (λ, 1− λ))M ∈ [A,B]⇔ ∃λ ∈ [0, 1],
−−→AM = λ
−→AB
• Partie convexe de ESoit A ⊆ E une partie de E . A est dite convexe lorsque dès qu’elle contient deux points M et N elle
contient le segment [M,N ]A convexe⇔ ∀(M,N) ∈ A2, [M,N ] ⊆ A
Exercice27: Soit A une partie non vide de l’espace affine E . On appelle enveloppe convexe de A, notéeC(A) l’ensemble de tous les barycentres possibles de points de A affectés de masses positives ( on peut pren-dre autant de points que l’on veut ). Par exemple l’enveloppe convexe de trois points A,B,C non alignésest le triangle ABC et tous les points intérieurs à ce triangle. Montrer C(A) est convexe. Comparer pourl’inclusion C(X1∩X2) et C(X1)∩C(X2) ou X1 et X2 sont deux parties quelconques de E d’intersectionnon vide.
12.3 Applications affines, transformations affines
• Application affineSoit f une application de l’espace affine E dans l’espace affine E 0. f est une application affine si et
seulement si il existe une application linéaire ϕf et un point A ∈ E tels que∀M ∈ E , f(M) = f(A) + ϕf(
−−→AM)
dans ce cas , pour tout couple de points (M,N) ∈ E2 on a−−−−−−−→f(M)f(N) = ϕf(
−−→MN)
ϕf est l’application linéaire associée à fEn particulier toute application linéaire est une application affine qui vérifie f(0E) = 0E 0
• Conservation du barycentreSoit f une application affine . Pour toute famille de points (Ai)1≤i≤n pondérés par les masses (λi)1≤i≤n ,
si G = bar((Ai)1≤i≤n, (λi)1≤i≤n), alors f(G) = bar((f(Ai))1≤i≤n, (λi)1≤i≤n)Exemple: si T = A,B,C est une partie du plan formée de trois points non alignés, l’ensemble XT =
f ∈ GA(E), f(T ) = T des transformations du plan qui laissent T globalement invariante est un sous-groupe de GA(E), formé de six application : chacune de ces six applications est caractérisée par l’imagedes trois points A,B et C:
27 si M,M 0sont deux points de C(A), on a M = bar((Ai)1≤i≤p, (λi)1≤i≤p) et M 0 = bar((A0i)1≤i≤n, (λ0i)1≤i≤n) ou les
λI ,λ0i sont tous positifs ou nuls. Soit λ ∈ [0, 1] et N = bar((M,M 0), (λ, 1 − λ)).Le théorème d’associativité fournit N =bar((Ai)1≤i≤p ∪ (A0i)1≤i≤n, (λλi)1≤i≤p ∪ ((1 − λ)λ0i)1≤i≤n) donc N est un barycentre de points de A affectés de massespositives et donc N ∈ C(A). si M ∈ C(X1 ∩ X2) , M est un barycentre positif de points de X1 donc M ∈ C(X1) et demêmeM ∈ C(X2) . Donc C(X1 ∩X2) ⊆ C(X1) ∩ C(X2). Cependant l’inclusion inverse est fausse , il suffit par exemple deconsidérer sur une droite trois points A,B,C dans cet ordre et X1 = A,B ,X2 = A,C .On a C(X1) = [A,B], C(X2) =[A,C], C(X1 ∩X2) = A , C(X1) ∩ C(X2) = [A,B]
70 lycée Dessaignes 2004-2005

par exemple 28 l’application f telle que f(A) = A, f(B) = C et f(C) = B admet pour endomor-phisme associé l’application linéaire ϕf telle que
ϕf(−→AB) =
−→AC et ϕf(
−→AC) =
−→AB
Pour toute application f ∈ XT , l’image par f de l’isobarycentreG = bar((A,B,C), (1, 1, 1))
du triangle T est égale à bar((f(A), f(B), f(C), (1, 1, 1)) = G
• La translation de vecteur −→x est une application affine de E dont l’endomorphisme associé est IdE• On appelle homothétie de centre Ω et de rapport k l’application affine f = hΩ,k définie par
−−−−→Ωf(M) = k
−−→ΩM
son endomorphisme associé est égal à k.IdEsi k 6= 1 , Ω est l’unique point fixe de f : on le retrouve en résolvant l’équation f(M) =Msi k = 1 , f est l’identité de EInversement si f est une application affine d’endomorphisme associé k.Id avec k 6= 1 alors f est une
homothétie de rapport k.
• Projection affine : Soit F et F 0 deux sous espaces supplémentaires de E et A un point de E .Soit d’autrepart W = A + F . Puisque F ⊕ F 0 = E , les deux sous espaces M + F 0 et A + F se coupent en ununique point noté p(M)
∀M ∈ E , p(M) = (M + F 0) ∩ (A+ F )On appelle projection surW parallèlement à F 0 l’application p ainsi définieL’endomorphisme associé à la projection p est la projection sur F parallèlement à F 0Exemple dans R3 : déterminer les coordonnées de la projection du point M0(x0, y0, z0) sur la droite
∆ = A+ vect(e1 − e2 + e3) où A =110
parallèlement au plan Π d’équationX + Y + Z = 0
On cherche l’intersection de la droite ∆ avec le plan Π0 =M0+Π qui passe par M0 et qui est dirigé parΠ. L’équation cartésienne de Π0 dans le repère R =( 0, e1, e2, e3) est
X + Y + Z = x0 + y0 + z0
p(M0) ∈ ∆⇔ ∃λ ∈ R,−−−−→Ap(M0) = λ(e1 − e2 + e3)⇔ p(M0) =
λ+ 1−λ+ 1
λ.
Doncp(M0) ∈ ∆ ∩Π0 ⇔ λ+ 2 = x0 + y0 + z0
, d’ou
p(M0) =x0 + y0 + z0 − 1−(x0 + y0 + z0) + 3(x0 + y0 + z0)− 2
• Symétrie affine : Soit F et F 0 deux sous espaces supplémentaires deE etA un point de E .Soit d’autre partW = A + F .On appelle symétrie par rapport àW parallélément à F 0 l’application qui à tout pointM deE associe l’unique point s(M) tel que le milieu I de (M, s(M)) appartienne àW et que la vecteur
−−−−→Ms(M)
appartienne à F 0. On montre alors que−−−−−−−→p(M)s(M) = −
−−−−−→p(M)M
L’endomorphisme associé à s est la symétrie vectorielle par rapport à F parallèlement à F 0Exemple: dans l’exemple précédent la symétrie de base ∆ et de direction Π est définie si M = (x, y, z)
28 l’application f donnée en exemple est en fait la symétrie affine par rapport à la droite (AG) de direction la droite (BC) .
71 lycée Dessaignes 2005-2006

et s(M) = (x0, y0, z0) on devra résoudre le systèmex+ x0
2= λ+ 1,
y + y0
2= −λ+ 1, z + z
0
2= λ, x0 − x+ y0 − y + z0 − z = 0
ce qui fournit : λ+ 2 = x+ y + z donc
s(M) =x0 = x+ 2y + 2z − 2y0 = −2x− 3y − 2z + 6z0 = 2x+ 2y + z − 4
Autre exemple : cherchons la forme analytique des 6 transformations XT = f1, f2, f3, f4, f5, f6 laissantle triangle A(1, 0);B(2, 1), C(0, 2) globalement invariantG = bar((A,B,C), (1, 1, 1)) = (1, 1) est invariant par ces 6 applications−→GA = −−→e2 et
−→GB =
−→e1 d’ou si f ∈ XT ϕf
−−→(GA) =
−−−−→Gf(A) et ϕf
−−→(GB) =
−−−−→Gf(B)
On en déduit ϕf(−→e1 ) et ϕf(
−→e2 ) et la matrice de ϕf dans la base canonique
par exemple cherchons la symétrie affine f par rapport à la droite (GC) parallélement à (−→BA)
f(A) = B, f(B) = A, f(C) = C ⇒ ϕf(−→GA) =
−→GB et ϕf(
−→GB) =
−→GA donc mat(ϕf2) =
0 −1−1 0donc la forme analytique de f est donnée par M(x, y)→M 0(x0 = −y + a,−x+ b)puisque f(G) = G on en déduit que a = 2 et b = 2
M(x, y)→M 0(x0 = −y + 2,−x+ 2)
• Soit f une application affine de E dans lui même et A ∈ E . Il existe une unique application affine u laissantle point A invariant et une unique translation t telle que tou = f
• Une application affine f de E dans E est appelée transformation lorsque f est bijective. On note GA(E)l’ensemble des transformations affines de E . f est une transformation de E ssi son endomorphisme associéest un automorphisme de E
f ∈ GA(E)⇔ ϕf ∈ GL(E)si f ∈ GA(E), alors
f−1 ∈ GA(E) et ϕf−1 = (ϕf)−1
• En particulier les translations et les homothéties de rapport non nul sont des transformations de E .
• Affinité de baseW et de direction F 0On se donne F et F 0 deux sous espaces supplémentaires de E et W un sous espace affine dirigé par F
. Soit d’autre part λ ∈ R . On appelle affinité de base W de direction F 0 et de rapport λ l’applicationa :M →M 0 telle que si p désigne la projection surW parallélément à F 0, alors
−−−−−−−→p(M)a(M) = λ
−−−−−→p(M)M
Si λ = 0 on retrouve la projection p : a = pSi λ = 1 on obtient IdE : a = IdESi λ = −1 , on obtient la symétrie de baseW et de direction F 0
• Groupe des translationsSoit T l’ensemble des translations de E . T est un sous-groupe commutatif de GA(E)
f ∈ T ⇔ϕf = Id
t−→u ot−→v = t−→u +−→v ; (t−→u )−1 = t−−→u
L’application Φ : E → GA(E)−→u 7→ t−→u
est un isomorphisme de (E,+) dans (GA(E), o)
• Groupe des homothéties-translationsSoit HT l’ensemble des transformations affines qui sont soit des translations , soit des homothéties de
72 lycée Dessaignes 2004-2005

rapport non nul.f ∈ HT ⇔∃k ∈ R∗,ϕf = k.Id
Lorsque l’on compose deux homothéties hΩ,k, hΩ0,k0de rapports k, k0 non nuls , on a deux cas qui seprésentent
kk0 6= 1 : hΩ,kohΩ0,k0 = hΩ”,kk0
kk0 = 1 : hΩ,kohΩ0,k0 = t−→udans la formule précédente ,Ω” est obtenu en déterminant l’unique point fixe de hΩ,kohΩ0,k0 , et
−→u vérifie:
−→u =
−−−−−−−−−−−−→M hΩ,kohΩ0,k0(M)
ouM est un point quelconque de ELorsque l’on compose une homothétie hΩ,k et une translation t−→v on obtient quelque soit l’ordre de com-
position une homothétie de rapport khΩ,kot−→v = hΩ1,k t−→v ohΩ,k = hΩ2,k
Ω1 (resp Ω2) est l’unique point fixe de hΩ,kot−→v (resp t−→v ohΩ,k)(hΩ,k)
−1 = hΩ,1/kCes diverses propriétés permettent de prouver que HT est un sous-groupe de (GA(E), o) , en général
non commutatifExemple : caractériser le point Ω”, centre de l’homothétie hΩ,kohΩ0,k0hΩ,kohΩ0,k0(Ω”) = Ω” posons M = hΩ0,k0(Ω”), on a donc Ω” = hΩ,k(M) d’où
−−→Ω0M = k0
−−→Ω0Ω” et
−−→ΩΩ” = k
−−→ΩM donc k0
−−→Ω0Ω” =
−→Ω0Ω +
−−→ΩM =
−→Ω0Ω +
1
k
−−→ΩΩ” et finalment (k0 − 1
k)−−→ΩΩ” = (1 − k0)
−→Ω0Ω
soit−−→ΩΩ” =
k(1− k0)1− kk0
−→ΩΩ0
• Un repère cartésien d’un espace affine E est un couple R =(0,B) formé d’un point 0 ∈ E et d’une baseB = (−→e1 , ..,−→en ) de E. SiM ∈ E est un point de E , les coordonnées deM dans le repèreR sont les n rtéelsdéfinis par :
−−→OM =
n
i=1
xi−→ei
On appelle repère cartésien canonique de Rn le repère (0, (−→e1 , ..,−→en )) où 0 = (0, .., 0) et ei est leiiemevecteur de base canonique de Rn
• Expression d’une application affine.Soit f une application affine de Rn dans Rm, d’application linéaire associée ϕf . Si A = (ai,j)1≤i≤m
1≤j≤mest
la matrice de ϕf relativement au bases canoniques , la relation f(M) = f(O) + ϕf(−−→OM) permet d’obtenir
les coordonnées de f(M) sous la formex01 =
nj=1 a1,jxj + b1
x02 =nj=1 a2,jxj + b2.......
x0m =nj=1 am,jxj + bm
• Equations cartésiennes de droites du planSoitD = A+vect(−→u ) une droite deR2 avecA(xA, yA) et−→u (xu, yu) donnés par leurs corrdonnées dans
le repère canonique . On obtient une équation cartésienne de D en écrivant : M ∈ D ⇔ det(−−→AM,
−→u ) =
0⇔ x− xA xuy − yA yu
= 0
Une telle équation se présente sous la formeax+ by + c = 0 avec (a, b) 6= (0, 0)
−→w = (−b, a) est un vecteur directeur deD−→u = (a, b) est un vecteur normal àD (voir produit scalaire)
73 lycée Dessaignes 2005-2006

• Parallèlisme de deux droitesles droites D et D0 d’équations respectives
ax+ by + c = 0 et a0x+ b0y + c0 = 0sont parallèles ssi leurs vecteurs normaux ( ou directeurs , cela revient au même ) sont colinéaires soit
a a0
b b0 = 0 = ab0 − ba0
• Equations cartésiennes de plans de l’espaceSoit P = A + vect(
−→u ,−→v )) un plan de R3 avec A(xA, yA, zA) et −→u (xu, yu, zu),−→v (xv, yv, zv) donnés
par leurs cordonnées dans le repère canonique . On obtient une équation cartésienne de P en écrivant :
M ∈ P ⇔ det(−−→AM,
−→u , v) = 0⇔
x− xA xu xvy − yA yu yvz − zA zu zv
= 0
Une telle équation se présente sous la formeax+ by + cz + d = 0
si a 6= 0,−→w = (−b, a, 0) et−→w0 = (−c, 0, a) sont deux vecteurs directeurs libres de P
• Parallèlisme de deux plansles plans P et P 0 d’équations respectives ax+ by+ cz+ d = 0 et a0x+ b0y+ c0z+ d0 = 0 sont parallèles
ssi leurs vecteurs normaux sont colinéaires soitabc∧
a0
b0
c0=−→0
• Définition d’une droite de l’espace par deux équationsSoient P, P 0 deux plans de R3 non parallèles . P ∩ P 0 = D est donc une droite qui est entièrement
caractérisée par le système formé de deux équations cartésiennes de P et P 0
ax+ by + cz + d = 0a0x+ b0y + c0z + d0 = 0
Inversement un tel système définit bien une droite lorsque les deux plans P, P 0 définis par les équationsdu système ne sont pas parallèles
Exemple: x+ y + z + 1 = 0x− y + 2z − 1 = 0 définit une droite D de R3, que l’on peut caractériser en résolvant ce
système par rapport aux inconnues principales x, y. z sera alors pris comme paramètre:
x = −32z, y = −1 + 1
2z
On voit donc que le point A(0,−1, 0) appartient à D et que le vecteur −→u (−32,1
2, 1) est un vecteur directeur
de D. Donc D = A+ vect(−→u )
• Equations paramètriques d’un sous espace affine de RnSoitW = A+F un sous espace affine de E =Rn oùA(a1, .., an) est un point deRn etF = vect(
−→f1 , ..,
−→fp )
un sous-espace vectoriel deRnde dimension p. Les coordonnées deA et des vecteurs−→f i sont données dans
le repère canonique :∀j ∈ 1, .., p ,
−→fj = (fi,j)1≤i≤n
On appelle systèmed’équations paramètriques deW le système obtenu en écrivant que le pointM(x1, .., xn)de E appartient àW c’est à dire vérifie
−−→AM ∈ V ect(f1, .., fp), ce qui revient à dire qu’il existe (λ1, ..,λp) ∈
74 lycée Dessaignes 2004-2005

Rp tels que−−→AM = p
j=1 λj−→fj
x1 =pj=1 λjf1,j + a1
x2 =pj=1 λjf2,j + a2...........
xn =pj=1 λjfn,j + an
Une telle équation pemet de retrouver très facilement le sous espaceW à l’aide du pointA et des vecteursdirecteurs
• Equation paramètrique d’une droite du plan R2A(xA, yA) et
−→u = (xu, yu) . Soit D la droite D = A+ vect(
−→u )
M(x, y) ∈ D⇔ ∃λ ∈ R, x = λxu + xAy = λyu + yA
par exemple les équation ∃t ∈ R+, x = t+ 3y = −t+ 2 définissent la demi droite passant par le point A(3, 2)
dirigée par le vecteur −→u (1,−1), (demi-droite seulement car t ≥ 0)
• Equation paramètrique d’une droite de l’espace R3A(xA, yA, zA) et
−→u = (xu, yu, zu) . Soit D la droite D = A+ vect(
−→u )
M(x, y, z) ∈ D⇔ ∃λ ∈ R,x = λxu + xAy = λyu + yAz = λzu + zA
par exemple le système de dux équations x = −32z et y = −1 + 1
2z peut se réécrire
x = −32z
y = −1 + 12z
z = z
ce qui caractérise la droite passant par A(0,−1, 0) dirigée par −→u (−32,1
2, 1)
• Equation paramètrique d’un plan de R3A(xA, yA, zA) et
−→u = (xu, yu, zu),
−→v = (xv, yv, zv)
Soit P le plan P = A+ vect(−→u ,−→v )
M(x, y, z) ∈ P ⇔ ∃(λ, µ) ∈ R2,x = λxu + µxv + xAy = λyu ++µyv + yAz = λzu + µzv + zA
Exemple : Déterminer l’intersection du plan P passant par les trois points A(1, 0, 0), B(0, 1, 0), C(0, 0, 1)et de la surface S d’équation xy = −zP = A+ vect(
−→AB,−→AC) admet pour équation paramètrique
∃(λ, µ) ∈ R2,x = λ+ µ+ 1y = −λz = −µ
d’oùM ∈ P ∩ S ⇔ (λ+ µ+ 1)(−λ) = µM ∈ P ∩ S ⇔ λ2 + λ(1 + µ) + µ = 0
M ∈ P ∩ S ⇔ λ = −1 ou λ = −µ
λ = −1 fournit ∃µ ∈ Rx = µy = 1z = −µ
soit la droite ∆1 passant par B(0, 1, 0) dirigée par u(1, 0,−1)
75 lycée Dessaignes 2005-2006

λ = −µ fournit ∃µ ∈ Rx = 1y = µz = −µ
soit la droite ∆2 passant par A(1, 0, 0) dirigée par v(0, 1,−1)
DoncP ∩ S = ∆1 ∪∆2
13 Espaces vectoriels euclidiens
13.1 Produit scalaire
• Soit E un espace vectoriel sur R . On appelle produit scalaire sur E toute forme bilinéaire symétriquedéfinie positive sur E c’est à dire toute application ϕ de E2 à valeurs dans R : (x, y)→ ϕ(x, y) telle que ϕsoit linéaire par rapport à x ( lorsque y est fixé), soit linéaire par rapport à y (lorsque x,est fixé), vérifie
∀(x, y) ∈ E2, ϕ(x, y) = ϕ(y, x)
et de plus∀x ∈ E − 0E , 0 < ϕ(x, x)
On note ϕ(x, y) = (x | y) ou −→x .−→y dans le cas d’un produit scalaire utilisé en géomètrie
• Produits scalaires usuelsdans Rn : le produit scalaire canonique
(x | y) =n
i=1
xiyi
dans C0([a, b],R)
(f | g) =b
a
f(t)g(t)dt
• Norme euclidienne d’un vecteurkxk = (x | x)kxk = 0⇔ x = 0E
kλ.xk = |λ| kxk
• Inégalité de Cauchy-Schwarz∀(x, y) ∈ E2, |(x | y)| ≤ kxk kyk
Il y a égalité dans cette inégalité si et seulement si les deux vecturs x et y sont colinéairesconséquences sur les produits scalaires usuels:
n
i=1
xiyi ≤n
i=1
x2i
n
i=1
y2i
b
a
f(t)g(t)dt ≤b
a
f2(t)dtb
a
g2(t)dt
• Distance associée à la norme euclidienne∀(x, y) ∈ E2, d(x, y) = ky − xk = d(y, x)
• Inégalité triangulaire∀(x, y) ∈ E2, kx+ yk ≤ kxk+ kyk
conséquence|kxk− kyk| ≤ kx+ yk
76 lycée Dessaignes 2004-2005

( en effet kxk=k−y + x+ yk ≤ k−yk+kx+ yk )∀(x, y, z) ∈ E3, d(x, z) ≤ d(x, y) + d(y, z)
• Vecteurs unitairesu est dit unitaire lorsque kuk = 1. Si u est un vecteur quelconque non nul il existe exactement deux
vecteurs unitaires qui sont colinéaires à u:1
kuk .u et −1
kuk .u
• Vecteurs orthogonauxSoient (u, v) ∈ E2.On dit que u et v sont orthogonaux ssi leur produit scalaire est nul
(u | v) = 0
• Sous espaces-vectoriels orthogonauxSoient F et G deux sous-espaces vectoriels de E. F et G sont dits orthogonaux lorsque tout vecteur de
F est orthogonal à tout vecteur de GF ⊥ G⇔ ∀(x, y) ∈ F ×G, (x | y) = 0
• Orthogonal d’un sous-espace vectorielSoit F un sous-espace vectoriel de E. On appelle orthogonal de F l’ensemble noté F⊥ des vecteurs de
E qui sont orthogonaux à tous les vecteurs de F ,x ∈ F⊥ ⇔ ∀y ∈ F, (x | y) = 0
L’orthogonal de F est un sous espace vectoriel de E , qui est ortogonal à F . De plusF ∩ F⊥ = 0E
• Famille orthogonale finieUne famille finie (ai)1≤i≤n est orthogonale si elle est constituée de vecteurs non nuls et deux à deux
orthogonaux∀(i, j) ∈ 1, .., n2 , i 6= j ⇒ (ai | aj) = 0
Toute famille orthonogonale finie est libre
• Famille orthonormale finieUne famille finie (ai)1≤i≤n est orthonormale si elle est constituée de vecteurs deux à deux orthogonaux
et unitaires∀(i, j) ∈ 1, .., n2 , (ai | aj) = δi,j
Toute famille orthonormale finie est libre
• Relation de Pythagore pour une famille orthogonale finiesi (ai)1≤i≤n est une famille orthogonale finie alors
n
i=1
ai
2
=n
i=1
kaik2
• Relations entre produit scalaire et norme
kx+ yk2 = kxk2 + kyk2 + 2(x | y)kx− yk2 = kxk2 + kyk2 − 2(x | y)
kx+ yk2 + kx− yk2 = 2(kxk2 + kyk2) :identité du parallèlogrammekx+ yk2 − kx− yk2 = 4(x | y) :identité de polarisation
13.2 Espace Euclidien
• Un espace Euclidien est un espace vectoriel réel de dimension finie muni d’un produit scalaire
• Dans un espace euclidien il existe des bases orthonormales . En particulier si (ei)1≤i≤n est une base de E ,
77 lycée Dessaignes 2005-2006

il existe une base (fi)1≤i≤n orthonormale telle que∀i ∈ 1, .., n , vect(e1, .., ei) = vect(f1, .., fi)
Le procédé appliqué pour obtenir cette base est appelé procédé d’orthonormalisation de Schmidt . Ilconsiste à poser f1 =
1
ke1k.e1 , puis u2 = e2+ λ.f1 et calculer λ de telle sorte que (u2 | f1) = 0 : on trouve
λ = −(e2 | f1)On obtient alors un vecteur u2 orthogonal à f1 et on pose
f2 =1
ku2k.u2
On déclare ensuite u3 = e3+λf2+µf1 et l’on calcule λ, µ de telle sorte que (u3 | f1) = (u3 | f2) = 0 :ontrouve
λ = −(e3 | f1) et µ = −(e3 | f2).On obtient alors un vecteur u3 orthogonal à la fois à f1 et à f2: on pose
f3 =1
ku3k.u3
On construit ainsi par récurrence finie la suite des vecteurs fi en posant à l’étape niui = ei + λi−1fi−1 + ...+ λ1f1
où les vecteurs f1, .., fi−1 sont calculés précédemment. Il suffit d’ajuster les coefficients λj de telle sorteque ui soit orthogonal à chacun des fj pour tout j tel que 1 ≤ j ≤ i− 1: on trouve λj = −(ei | fj). Ensuiteil ne reste plus qu’à normer le vecteur ui
• Expression des coordonnées d’un vecteurs dans une base orthonormaleSoit (fi)1≤i≤n une base orthonormale de E: On a
∀x ∈ E, x =n
i=1
(fi | x).fi
• Expression du produit scalaire dans une base orthonormalesi (ei)1≤i≤n est une base orthonormale de E alors en posant x = n
i=1 xiei et y =ni=1 yiei
(x | y) =n
i=1
xiyi
kxk =n
i=1
x2i
d(x, y) =n
i=1
(yi − xi)2
• Suppémentaire orthogonalL’orthogonal d’un sous espace vectoriel F est un suppémentaire de F appelé supplémentaire orthogonal
et noté F⊥
F ⊕ F⊥ = E
dim(F⊥) = dim(E)− dim(F )
• Projecteurs orthogonauxSoit p un projecteur de E. On dit que p est un projecteur orthogonal lorsque Im(p) = ker(p)
⊥. un tel
projecteur vérifiepop = p
∀(x, y) ∈ E2, (p(x) | y) = (x | p(y))
78 lycée Dessaignes 2004-2005

Exercice29: On se donne deux sous espaces suppémentaires F et G dans E non nécéssairement orthog-onaux. Soit p la projection sur F parallèlement à G . On suppose que
∀x ∈ E, kp(x)k ≤ kxkSoit x ∈ (ker p)⊥. Démontrer que kp(x)k2 = kxk2 + kp(x)− xk2 . En déduire que G = F⊥ et que p estun projecteur orthogonal.
• Projection orthogonale sur un sous-espace vectorielSoit F un sous-espace vectoriel de E. On appelle projection orthogonale pF sur F la projection sur F
(Im(pF ) = F ) parallèlement à la direction F⊥(ker(pF ) = F
⊥)
x = pF (x) + pF⊥ (x) avec pF (x) ∈ F et pF⊥ (x) ∈ F
⊥
kxk2 = kpF (x)k2 + pF⊥ (x)
2
Exercice30: R3 étant muni du produit scalaire canonique, déterminer la matrice dans la base canoniquede la projection orthogonale sur le plan F d’équation x+ y + z = 0
• Expression de la projection sur un sous espace muni d’une base orthonormaleSoit F un sous espace vectoriel de E et (fi)1≤i≤p une base orthonormée de F . Alors si pF désigne la
projection orthogonale sur F on a
∀x ∈ E, pF (x) =
p
i=1
(fi | x).fi
kpF (x)k2 =
p
i=1
(fi | x)2
en particulier si dim(F ) = 1 :supposons F = vect(u) où u est un vecteur unitaire. Alors∀x ∈ E, pF (x) = (x | u).u
Exemple : dans R3, la projection orthogonale sur le plan F d’équation x + y + z = 0 peut s’obteniren considérant la base orthonormée de F : f1 = (1/
√2,−1/
√2, 0) , f2 = (1/
√6, 1/√6,−2/
√6). on a
alors si x = (x1, x2, x3), pF (x) =x1 − x2√
2f1 +
x1 + x2 − 2x3√6
f2.
• Distance d’un point à un sous espace vectoriel.Soit F un sous espace vectoriel de E. Pour tout vecteur x ∈ E on appelle distance de x à F le réel
d(x, F ) = inf d(x, y), y ∈ FCette distance est atteinte pour y = pF (x) et vaut
d(x, F ) = kx− pF (x)kd(x, F )2 = kxk2 − kpF (x)k2
si (fi)1≤i≤p est une base orthonormale de F , alors
d(x, F )2 = kxk2 −p
i=1
(fi | x)2
29 On écrit p(x) = p(x)−x+x et on remarque que (x | p(x)−x) = 0 puisque p(x)−x ∈ ker p et x ∈ ker p⊥.On applique alorsle théorème de pythagore pour obtenir l’égalité kp(x)k2 = kxk2+kp(x)− xk2 . Ensuite puisque kp(x)k ≤ kxk on en déduit quekp(x)− xk = 0 et donc quex = p(x) ∈ Im p . Ceci prouve que ker p⊥ ⊆ Im p. or dimker p⊥ = dimE−dimker p = dim Im p.d’ou ker p⊥ = Im p.30 un vecteur normal à F est (1, 1, 1) , une base de F est ( (1,−1, 0) ,(1, 0,−1)). On a donc p(e1) + p(e2) + p(e3) = 0,
p(e1)−p(e2) = e1−e2, p(e1)−p(e3) = e1−e3 d’ou en résolvant p(e1) =1
3(2e1−e2−e3), p(e2) =
1
3(−e1+2e2−e3)p(e3) =
1
3(−e1 − e2 + 2e3)donc M =
2/3 −1/3 −1/3−1/3 2/3 −1/3−1/3 −1/3 2/3
79 lycée Dessaignes 2005-2006

13.3 Automorphismes orthogonaux
• Automorphisme orthogonalSoit f un automorphisme de l’espace vectoriel euclidien E. f est un automophisme orthogonal si et
seulement si f conserve le produit scalaire∀(x, y) ∈ E2, (f(x) | f(y)) = (x | y)
Il est équivalent de dire que f conserve la norme∀x ∈ E, kf(x)k = kxk
Il est équivalent de dire que f transforme une base orthonormale (ei)1≤i≤n de E en une base orthonor-male (f(ei))1≤i≤nde E.
• Groupe orthogonal O(E)l’ensemble des automorphismes orthogonaux forme un sous groupe du groupe linéaire (GL(E), o) , ap-
pelé groupe orthogonal et noté O(E).En d’autres termes , la composée de deux automorphismes orthogonaux est un aotomiophisme orthogonal.
L’inverse d’un automorphisme orthogonal est un automorphisme orthogonal.
• Symétrie orthogonaleSoit F un sous espace vectoriel de E et pF la projection orthogonale sur F . On appelle symétrie orthog-
onale par raport à F l’applicationsF = 2pF − IdsF ∈ O(E)
si x = xF + xF⊥ avec (xF , xF⊥) ∈ F × F⊥ , alors s(x) = xF − xF⊥
• Symétrie orthogonale par rapport à une droite, ou demi-tourSoit D = vect(u) ou u est un vecteur unitaire . La symétrie orthogonale par rapport àD est définie par
sD(x) = 2(x | u).u− xelle laisse tous les vecteurs de D invariants et transforme les vecteurs de D⊥(qui est un hyperplan) en
leurs opposés. On l’appelle aussi le demi-tour d’axe D
• Réflexion d’hyperplan Psi dim(P ) = dim(E)− 1, P est un hyperplan de E. La symétrie orthogonale par rapport à P s’appelle
une réflexion: elle laisse tous les vecteurs de P invariants et transforme les vecteurs de D⊥ (qui est unedroite) en leurs opposés . En notant u un vecteur unitaire normal à F , c’est à dire tel que F ⊕V ect(u) = Eet kuk = 1 on a
sP (x) = x− 2(x | u).u
• Echange dce deux vecteurs unitaires par une réflexionEtant donné deux vecteurs unitaire a et b ditincts , il existe une et une seule reflexion s qui transforme a
en b.Elle a pour hyperplan (vect(b− a))⊥
• Matrices orthogonalesSoit n ≥ 1 un entier naturel et M ∈ Mn(R) . la matrice M est orthogonale si et esulement si l’en-
domorphisme f de Rn canoniquement associé à M est un automorphisme orthogonal . On note On(R)l’ensemble des matrices orthogonales . On(R) est un sous-groupe de (GLn(R),×)
• Caractérisation des matrices orthogonalesSoitM ∈Mn(R) . La matriceM est orthogonale ssi les colonnes deM forment une base orthonormale
de Rn deM . Ceci revient à dire quetM ×M = M × tM = In
ou encore : M−1 = tM
• Changement de base orthonormale
80 lycée Dessaignes 2004-2005

Soient B,B0 deux bases orthonormaes de Rn. la matrice de passage de B à B0 est orthogonale . Récipro-quement si B est une base ortho,normale et si la matrice de passage de B à B0 est orthogonale , almors B0est une base orthonormale.
• Déterminant d’une matrice orthogonale
M ∈ On(R) ⇒ det(M) = 1 ou det(M) = −1f ∈ O(E) ⇒ det(f) = 1 ou det(f) = −1
• Bases orthonormales directes de RnLa baseB1 est appelée base orthonormale directe deRn lorsque lamatrice de passage de la base canonique
B0 de Rn à B1 a pour déterminant 1.Dans le cas contraire , B1 est dite rétrograde.
• Déterminant d’une réflexion
det(sP ) = −1
• Groupe spécial orthogonal.Par définition , f ∈ L(E) est une rotation ssi f ∈ O(E) et det(f) = 1 (attention de ne pas retenir quee la
deuxième condition det f = 1, qui caractérise non pas les rotations mais les automorphismes de conservantl’aire algèbrique.
SO(E) = f ∈ O(E), det(f) = 1SOn(R) = M ∈ On(R), det(M) = 1
si f ∈ L(E) , fSO(E) est un sous groupe de (O(E), o)SOn(R) est un sous groupe de (On(R),×)
• Caractérisation des rotationsUn endomorphisme f de E est une rotation ssi il transforme une base orthonormée directe en une base
orthonormée directe.
• Produit mixte de n vecteursSoient (ai)1≤i≤n unefamille den vecteurs deRn.on applelle produit mixte des n vecteurs ai de déterminant
de la famille (ai)1≤i≤n dans une base orthonormale directe quelconque B[x1, ...., xn] = detB
(a1, .., an)
si n = 2 |[x1, x2]| représente l’aire du parallèlogramme OACB avec−→OA = x1 ,
−→OB = x2 , et
−→OC =
x1 + x2si n = 3 |[x1, x2, x3]| représente le volume du parallélépipèdeOABCDEFG avec
−→OA = x1 et
−→OB = x2
,−→OC = x3 et
−→OG = x1 + x2 + x3
∀f ∈ L(E), [f(x1), ...., f(xn)] = det(f)× [x1, ...., xn]En particulier sin = 2 , une application linéairemultiplie une aire (ou un volume sin = 3) par la valeur ab-
solue de son déterminant. Il existe par exemple des applixcations qui ne sont pas des automorphismes orthog-onaux et qui conservent les aires en dimension 2: tel est le cas de l’endomorphisme f de matrice dans la base
canonique 1 10 1
. Sur le shéma qui suit on a porté les pointsA(0, 0), B(0, 1), C(1, 2), D(2, 1), E(2, 0)
et leurs images par f : l’aire de la partie A est conservée .
81 lycée Dessaignes 2005-2006

x3210-1
2
1.5
1
0.5
0
Les automorphismes orthogonaux conservent bien entendu les aires ou les volumes , mais ce ne sont pasles seuls!
• Produit vectorielsoient u, v deux vecteurs deR3. le produit vectoriel de u par v est l’unique vecteur u∧v de R3 qui vérifie
∀x ∈ R3, det(u, v, x) = (u ∧ v | x)
si les coordonnées de u et v sont données dans la base canonique par u =u1u2u3
et v =v1v2v3
, alors
u ∧ v =
u2 v2u3 v3
− u1 v1u3 v3u1 v1u2 v2
=u2v3 − u3v2−u1v3 + u3v1u1v2 − u2v1
(u ∧ v | u) = (u ∧ v | v) = 0
13.4 Automorphismes orthogonaux du plan
• Description de O(R2)dans le plan tout automorphisme orthogonal est soit une reflexion , soit le produit de deux réflexions ,
c’est à dire une rotation.
• Matrice dans une base orthonormée directe de la rotation d’angle θla rotation d’angle θ est l’automorphisme rθ deSO(R2) qui transforme e1 = (1, 0) en rθ(e1) = (cos θ, sin θ)
. Sa matrice dans la base canonique B est
MB(rθ) =cos θ − sin θsin θ cos θ
• Mesure de l’angle orienté de deux vecteurs non nulssoient u, v deux vecteurs non nuls . On appelle mesure de l’angle [(u, v) l’unique réel θ modulo 2π tel que
rθ(u
kuk) =v
kvkOn a alors, en notant θ = mes([(u, v)), les formules suivantes:
(u | v) = kuk kvk cos θ[u, v] = kuk kvk sin θ∀x ∈ R2, \(u, rθ(u)) = θ + 2kπ
remarque : par commodité on confond souvent l’angle [(u, v) et sa mesuremes([(u, v))
82 lycée Dessaignes 2004-2005

• Matrice d’une réflexionsoit su la réflexion par rapport à la droiteD = vect(u) , pour u = cos(
θ
2).e1 + sin(
θ
2).e2.
Alors su(u) = cos(θ).e1 + sin(θ).e2 et la matrice de s dans la base canonique est donnée par
MB(s) =cos θ sin θsin θ − cos θ
• Composée de deux réflexionsu et v étant deux vecteurs unitaires , tels que θ = [(u, v) on a alors
svosu = r2θ
13.5 Automorphismes orthogonaux de l’espace
• Angle de deux vecteurs de R3Soient u et v deux vecteurs unitaires non colinéaires de R3. On pose
w1 =u ∧ vku ∧ vk et u1 = u, v1 = w1 ∧ u1
La famille (u1, v1, w1) est une base orthonormale de R3. Le plan vect(u, v) = vect(u1, v1) est ainsi orientépar le choix de la base orthonormale (u1, v1), l’orientation correspondante de la droite vect(w) étant alorsdonnée par le vecteur u ∧ v. On appelle mesure de l’angle de u et v la mesure de cet angle [(u, v) pour cetteorientation du plan vect(u, v).Attention: il existe deux façons d’orienter le plan vect(u, v) , chacune de ces deux orientations étant
associée à une orientation de la droite vect(w) . Orienter le plan vect(u, v) revient donc à choisir uneorientation de l’axe vec(u ∧ v) ( par u ∧ v ou −u ∧ v)Plus généralement on définit l’angle de deux vecteurs quelconques x, y à l’aide des vecteurs unitaires
associés : en notant θ une mesure de [(x, y), on a:(x | y) = kxk kyk cos θ
kx ∧ yk = kxk kyk |sin θ|
• Définition d’une rotation par son axe et son angleSoit w un vecteur unitaire et θ ∈ R . Soit u un vecteur unitaire orthogonal à w et v = w ∧ u. La famille
B =(u, v, w) st une base orthonormale directe de R3. On appelle rotation d’axe D = vect(w) et d’angle θl’élément rw,θ de SO(R3) défini par
matB(rw,θ) =cos θ − sin θ 0sin θ cos θ 00 0 1
Inversement soit r une rotation différente de Id. L’ensemble des vecteurs invariants par r est une droitevectorielle vect(a) (a unitaire) . De plus si b est un vecteur quelconque non nul de (vect(a))⊥, en notant θl’angle \(b, r(b)) lorsque vect(a) est orientée par le choix du vecteur a, alors r est la rotation d’axe vect(a)et d’angle θ : r = ra,θ : pour tout vecteur x de (vect(a))⊥ on a la formule
r(x) = cos θ.x+ sin θ.a ∧ xPlus généralement si x est un vecteur quelconque de R3, en décomposant le vecteur x par projections
selon vect(a) et (vect(a))⊥, on a:x = (x | a).a+ (x− (x | a).a) avec x0 = (x− (x | a).a) ∈ (vect(a))⊥
ra,θ(x) = (x | a).a+ cos θ.x0 + sin θ.a ∧ x0La trace de la matrice de la rotation ra,θ dans une base orthonormée directe est égale à
tr(r) = 2 cos θ + 1
Exemple : déterminer la matrice M dans la base canonique de la rotation d’angle π/2 et d’axe orientépar e1 + e2 + e3
83 lycée Dessaignes 2005-2006

ici a =1√3(1, 1, 1) . Si x = (x1, x2, x3) , avec les notations précédentes
x = (x | a).a+ x0
avec (x | a).a = x1 + x2 + x33
(1, 1, 1) et x0 = (2x1 − x2 − x3
3,−x1 + 2x2 − x3
3,−x1 − x2 + 2x3
3)
ra,θ(x) =x1 + x2 + x3
3(1, 1, 1) + a ∧ x0
ra,θ(x) =x1 + x2 + x3
3(1, 1, 1) +
1√3(−x2 + x3, x1 − x3,−x1 + x2)
M =1/3 (1−
√3)/3 (1 +
√3)/3
(1 +√3)/3 1/3 (1−
√3)/3
(1−√3)/3 (1 +
√3)/3 1/3
• Caractérisations des automorphismes de l’espace par leurs vecteurs invariantsSoit f ∈ O(E) et F le sous-espace vectoriel des vecteurs invaraints par f
F = ker(f − IdE)dim(F ) = 3: dans ce cas f = IdEdim(F ) = 2: dans ce cas f est la réflexion sF par rapport à Fdim(F ) = 1: dans ce cas f est une rotation d’axe Fdim(F ) = 0: dans ce cas −f est une rotation , on dit que f est une anti-rotation
Exemple : quelle est la nature de l’endomorphisme f de R3 de matrice A =1
7
6 −2 −33 6 22 −3 6
.
On remarque que A est une matrice orthogonale puisque ses vecteurs colonnes forment une base ortho-
normale: de plus1
7
632∧ 17
−26−3
=1
7
−326
donc cette base est directe : A représente ainsi une
rotation f d’axeker(f − IdE)
dont les équations sont :−x− 2y − 3z = 03x− y + 2z = 02x− 3y − z = 0
⇔x = −zy = −zz = z
l’axe de la rotation est donc F = vect(e1 + e2 − e3); on choisit alors de l’orienter par le vecteur−→w =
1√3(1, 1,−1)
L’angle θ vérifie 2 cos θ + 1 = tr(A) =18
7soit cos θ =
11
14Pour trouver la valeur de θ , choisissons un vecteur unitaire de F⊥
−→u =
1√2(1,−1, 0)
et son imagef(−→u ) =
1
7√2(8,−3, 5)
On a −→u ∧ f(−→u ) = 1
14(−5,−5, 5) = sin θ.−→w donc sin θ =
−5√3
14
finalement θ = −ar cos(1114) pour cett orientation de l’axe F
14 Géomètrie euclidienne du plan et de l’espace
84 lycée Dessaignes 2004-2005

14.1 Distances , angles
• sous espaces affines orthogonaux , projections orthogonalesDeux sous espaces affinesW = A+F etW 0 = A0+F 0 de l’espace affine euclidien E sont orthogonaux
lorsque les sous-espaces vectorielsF, F 0 qui les dirigent sont orthogonaux . siF 0 = F⊥ on appelle projectionorthogonale surW la projection pW surW parallélement à F⊥. elle est définie par
pw(M) =M0 ⇔M 0 ∈W et
−−−→MM 0 ∈ F⊥
par exemple la projection orthogonale sur le plan Π de R3 d’équation cartésienne x − y + z + 1 = 0est l’application qui au point M(x, y, z) associe le point M 0(x0, y0, z0) tel que
M 0 ∈ Π et−−−→MM 0 ∈ Π⊥ = vect(e1 − e2 + e3)
soitx0 − y0 + z0 + 1 = 0
∃λ ∈ R, x0 − x = λ, y0 − y = −λ, z0 − z = λ
on obtient λ =−1− x+ y − z
3et
M 0(−1 + 2x+ y − z
3,1 + x+ 2y + z
3,−1− x+ y + 2z
3)
• Distance d’un point du plan à une droiteSoitD = A+ vect(−→u ) une droite du plan affine euclidien E où A est un point et−→u un vecteur directeur
deD. la distance d’un pointM de E àD est égale à la distance deM à la projection orthogonale deM surD . On l’obtient par la formule
d(M,D) =det(−−→AM,
−→u )
−→u
si D a pour équation cartésienne dans un repère orthonorméax+ by + c = 0
alors la distance deM(xM , yM) àD est donnée par
d(M,D) =|axM + byM + c|√
a2 + b2
• Distance d’un point de l’espace à une droiteSoitD = A+ vect(−→u ) une droite du plan affine euclidien EoùA est un point et−→u un vecteur directeur deD. La distance d’un pointM de E àD est égale à la distancedeM à la projection orthogonale deM sur D . On l’obtient par la formule
d(M,D) =det(−−→AM,
−→u )
−→u
si D a pour équation cartésienne dans un repère orthonorméax+ by + c = 0
alors la distance deM(xM , yM) àD est donnée par
d(M,D) =|axM + byM + c|√
a2 + b2
Exercice: Déterminer et reconnaitre le lieu Γ des points M(x, y) dont la distance à la droite d’équationx+ y + 1 = 0 est égale à la distance à l’origine
d(M,D) =|x+ y + 1|√
2, d(M,O) = x2 + y2 d’ou
M(x, y) ∈ Γ⇔ (x+ y + 1)2 = 2(x2 + y2)
d’après le cours sur les coniques, on reconnait la définitionMF
MH= 1 qui caractérise la parabole de
foyer O de directice D
85 lycée Dessaignes 2005-2006

x 3210-1-2-3
y
3
2
1
0
-1
-2
-3
parabole Γ
• Distance d’un point de l’espace à une droiteSoitD = A+vect(−→u ) une droite de l’espac affine euclidien E oùA.est un point et−→u un vecteur directeur
deD. La distance d’un pointM de E àD est égale à la distance deM à la projection orthogonale deM surD . On l’obtient par la formule
d(M,D) =
−−→AM ∧−→u−→u
Exercice: déterminer l’équation cartésienne du cylindre droit de rayon 1,d’axe la droite ∆ passant parO et dirigée par−→u = e1 + e2 + e3.Il s’agit du lieu des points de l’espace dont la distance à la droite ∆ est égale à 1
d(M,D) =(y − z)2 + (x− z)2 + (x− y)2√
3= 1
⇔ x2 + y2 + z2 =3
2+ xy + xz + yz
• Distance d’un point à un plan de l’espaceSoit P = A+vect(−→u ,−→v ) un plan de l’espace affine euclidien E oùA est un point et−→u , v deux vecteurs
directeurs de P . La distance d’un pointM de E à P est égale à la distance deM à la projection orthogonaledeM sur P . On l’obtient en mesurant la projection orthogonale de
−−→AM sur la normale au plan P, dirigée
par −→u ∧−→v :
d(M,P ) =(−−→AM | −→u ∧ −→v )−→u ∧−→v
• Lieu des points tels que (−−→AM | −→u ) = k ou lignes de niveau deM → (
−−→AM | −→u )
Soit A un point du plan et−→u un vecteur non nul de E . L’ensemble des pointsM tels que (−−→AM | −→u ) = k
est un sous espace affine de E dirigé par (vect(−→u ))⊥ , de dimension dim(E)−1,(c’est un hyperplan affine)et passant par le point H de la droite A+ vect(−→u ) tel que
−→AH =
k
kuk2−→u
14.2 Isomètries du plan , de l’espace
• On appelle isomètrie affine toute transformation f de E qui conserve les distances∀(M,N) ∈ E2, d(f(M), f(N)) = d(M,N)
Une telle application est caractérisée par le fait que son endomorphisme associé est un automorphismeorthogonal.On note Is(E) l’ensmble de isomètries de E
f ∈ Is(E)⇔ ϕf ∈ O(E)
86 lycée Dessaignes 2004-2005

L’ensemble des isomètries de E forme un sous groupe de (GA(E), o)
• DéplacementUn déplacement est une isomètrie de E dont l’endomorphisme associé est une rotation. L’ensemble des
déplacements est noté Is+(E).. Is+(E) est un sous groupe de (Is(E), o)f ∈ Is+(E)⇔ ϕf ∈ SO(E)
On appelle antidéplacement toute isomètrie qui n’est pas un déplacement
• Réflexion affineSoit A un point de E et −→u un vecteur non nul de E. SiW = A + (vect(
−→u ))⊥ on appelle réflexion par
rapport àW l’application sW qui au pointM de E associe le pointM 0 tel que, IM étant le milieu de (M,M 0),IM ∈W et
−−−→MM 0 ∈ vect(−→u ) soit:
(−→AIM | −→u ) = 0et∃λ ∈ R,
−−−→MM 0 = λ
−→u
la réflexion par rapport àW est un antidéplacement dont l’automorphisme associé est la réflexion vecto-rielle par rapport à (vect(−→u ))⊥. D’autre part
sWosW = IdEPar exemple dans R3, la réflexion de plan Π d’équation x− y+ z+1 = 0 est l’application qui au point
M(x, y, z) associe le point M 0(x0, y0, z0) tel que si I = (x+ x0
2,y + y0
2,z + z0
2)
I ∈ Π et−−−→MM 0 ∈ Π⊥ = vect(e1 − e2 + e3)
soitx+ x0 − y − y0 + z + z0 + 2 = 0
∃λ ∈ R, x0 − x = λ, y0 − y = −λ, z0 − z = λ
on obtient λ =−2− 2x+ 2y − 2z
3et
M 0(−2 + x+ 2y − 2z
3,2 + 2x+ y + 2z
3,−2− 2x+ 2y + z
3)
• Echange de deux points par une réflexion affineSoient (A,B) deux points de E . Il existe une unique réflexion de E qui transforme A en B . Cette
réflexion se fait par rapport au sous-espace affineW = IM + (vect(−→AB))⊥, IM étant le milieu de [A,B]
• Rotation affineUne rotation f de E est un déplacement admettant au moins un point fixe Ω.si dim(E) = 2 , lorsque f 6= IdE , ce pointΩ est unique et s’appelle le centre de la rotation . La rotation
rΩ,θ de centre Ω et d’angle θ est donc caractérisée, si l’on noteM 0 = rΩ,θ(M), par
∀M ∈ E , (−−→ΩM,
−−→ΩM 0) = θ et
−−→ΩM =
−−→ΩM 0
si dim(E) = 3, lorsque f 6= IdE l’ensemble des points invariants de f est la droite passant par Ω etadmettant pour direction la droite vectorielle formée des vecteurs invariants de l’endomorphisme ϕf . Cettedroite ∆ est l’axe de la rotation. La rotation r∆,θ d’axe orienté ∆ et d’angle θ est caractérisée , en notantH = p∆(M) le projeté orthogonal du pointM sur ∆ etM 0 = rΩ,θ(M)
M 0 ∈ H +∆⊥ ,−−→HM 0 =
−−→HM et
\(−−→HM−−−→, HM 0) = θ
14.3 Similitudes planes
• Une similitude de R2 de rapport k est une transformation affine f de E qui multiplie les distances par unrapport k 6= 0
∀(M,N) ∈ E2, d(f(M), f(N)) = k.d(M,N)
87 lycée Dessaignes 2005-2006

l’endomorphisme ϕf associé à f est le produit de k par un automorphisme orhogonal de Eϕf = k.u et u ∈ O(E)
Si u ∈ SO(E) (c’est à dire est une rotation plane) alors f est une similitude directe
• Une similitude s de R2 de rapport k est la composée d’une isomètrie u (rotation plane ou réflexion plane )et d’une homothétie h de rapport k : s = housi u est une rotation , la matrice de l’endomorphisme associé à s est
k 00 k
× cos θ − sin θsin θ cos θ
=k cos θ −k sin θk sin θ k cos θ
=a −bb a
ces matrices caractérisent les similitudes directessi u est une réflexion , la matrice de l’endomorphisme associé à s est
k 00 k
× cos θ sin θsin θ − cos θ =
k cos θ k sin θk sin θ −k cos θ =
a bb −a
ces matrices caractérisent les similitudes indirectes
• si k 6= 1 , la similitude f possède un unique point fixe Ω appelé centre.
• Lorsque la similitude est directe , elle est caractérisée par son centre Ω, son angle θ et son rapport k. Elles’écrit
s = hΩ,korΩ,θ
• Ecriture complexe d’une similitude directeSoit s la similitude directe de centre centre Ω, d’angle θ et de rapport k. En notant ω l’affixe du point Ω ,
zM l’affixe du pointM et zM 0 l’affixe du pointM 0 = s(M) on az0 = keiθ(z − w) + w
14.4 Cercles et sphères
• Soit D une droite du plan et C le cercle de centre A et de rayon r > 0.si d(A,D) > r , D ∩ C = ∅si d(A,D) < r , D ∩ C est constitué de deux points distinctssi d(A,D) = r, D ∩ C = pD(A)
• Soit P un plan de E et S la sphère de centre A et de rayon r > 0si d(A,P ) > r , P ∩ S = ∅si d(A,P ) < r , P ∩ S est un cercle de Psi d(A,P ) = r, D ∩ C = pD(A)
• Equation cartésienne du cercle de centre A et de rayon r(x− xA)2 + (y − yA)2 = r2
• Equation cartésienne de la sphère de centre A et de rayon r(x− xA)2 + (y − yA)2 + (z − zA)2 = r2
• Caractérisation d’un cercle où d’une sphère par un dimaètredans le plan le cercle C de diamètre [A,B] est caractérisé par:
M ∈ C ⇔−−→MA.
−−→MB = 0
dans l’espace , la sphère S de diamètre [A,B] est caractéerisée parM ∈ S ⇔
−−→MA.
−−→MB = 0
14.5 Coniques
88 lycée Dessaignes 2004-2005

• Lignes de niveau de MFMH
SoitD une droite du plan , F un point qui n’appartient pas àD et e un réel strictement positif. On appelle
conique de foyer F , de directriceD,et d’excentricité e, le lieu Γe,F,D des points dun plan tels queMF
MH= e
ou H = pD(M) est le projeté orthogonal deM sur la droite D
Γe,F,D = M ∈ E , MFMH
= e
lorsque e < 1, Γe,F,D est une ellipse , losrque e = 1 il s’agit d’une parabole , et si e > 1 c’est unehyperbole.
• L’ellipse x2
a2+y2
b2= 1
a > b > 0 . Γ admet pour excentricité e =c
a, pour foyers F1,2(±c, 0) pour excentricité c = a2−b2 ,et
pour directrice D1,2 : x = ±a2
c. On remarque que F1M + F2M = 2a , cette relation caractérisant par
ailleurs complètement Γc’est la définition bifocale ,à l’origine de la méthode dite du ’’jardinier ’’ pour tracer l’ellipseParamètrage de l’ellipse : x = a cos(t), y = b sin(t), t ∈ [0, 2π]Exemple:
x2
4+ y2 = 1
a = 2, b = 1, c =√3, F (±
√3, 0), D : x = ± 4√
3
x210-1-2
y
2
1
0
-1
-2
• L’hyperbole x2
a2− y
2
b2= 1
Γ admet pour excentricité e =c
a, pour foyers F (±c, 0) pour c =
√a2 + b2 ,et pour directrice D1,2 : x = ±
, les asymptotes∆,∆0 : y = ± bax
Paramètrage de l’hyperbole : x = a.ch(t), y = b.sh(t), t ∈ [0, 2π]Exemple:
x2
4− y2 = 1
a = 2, b = 1, c =√5, F (±
√5, 0), D : x = ± 4√
5,asymptotes y = ±x
2
89 lycée Dessaignes 2005-2006

x 420-2-4
y
4
2
0
-2
-4
On note que |F1M − F2M | = 2a , relation qui caractérise par ailleurs complètement Γ
• La parabole y2 = 2px
Γ admet pour excentricité e = 1 , pour foyer unique F (p
2, 0) , pour directrice unique D : x = −p
2
Paramètrage de la parabole x =t2
2p, y = t
Exemple : y2 = xp =
1
2,F = (
1
2, 0 ),D : x = −1
2
x 543210
y
3
2
1
0
-1
-2
-3
15 Courbes du plan
15.1 courbe définie par une représentation cartésienne
• Soit E un plan affine euclidien et R = (O,−→i ,−→j ) un repère orthonormal de E . Soient d’autre part I un
intervalle de R et ϕ,ψ deux fonctions de classe Ck sur I , avec k ≥ 1
L’application f :I → E
t 7→−−−−→OM(t)
où le pointM(t) ∈ E est défini par−−−−→OM(t) = ϕ(t)
−→i + ψ(t)
−→j = f(t)
définit un arc paramétré Γ de classe Ck ( en fait l’arc Γ est le couple (I, f) )
• Le pointM0 =M(t0) est dit régulier sur Γ lorsque−−−→df
dt(t0) = ϕ0(t0)
−→i + ψ0(t0)
−→j 6=
−→0
Dans le cas contraire ,M0 est un point singulier
90 lycée Dessaignes 2004-2005

• La Tangente à Γ en un point régulierM0 est la droite passant parM0 et digée par−−−→df
dt(t0)
tangente au pointM(t0) : ∆ =M(t0) + vect(
−−−→df
dt(t0))
• LaDemi-tangente à droite (resp à gauche) en un point singulierM0 de Γest définie comme la droite passantparM0 et dirigée par
−→u = lim
h→0+(resp0−)
−−−−−−−−−−−→M(t0)M(t0 + h)−−−−−−−−−−−→M(t0)M(t0 + h)
demi-tangente au pointM(t0) : ∆ =M(t0) + vect(−→u )
Exemple ; x(t) =t− 1t+ 1
, y(t) =t2
t+ 1x0(t) = t
(t+1)2est du signe de t
y0(t) = t(t+2)
(t+1)2est du signe de t(t+ 2)
si t 6= 0,−−→f 0(t) 6=
−→0 : seul le pointM(0) = A(−1, 0) est singuliert −∞.. −2 .. −1 .. 0 ..+∞x0(t) ....− −2 − || − 0 +x(t) 1...& 3 & −∞ || +∞& −1 % 1y(t) −∞% −4 & −∞ || +∞& 0 % +∞y0(t) + 0 − || − 0 +
6420-2-4-6
6
4
2
0-2
-4
-6
(t− 1t+ 1
,t2
t+ 1)
asymptotes :pour t→∞ x = 1 est asymptote verticale
pour t→ −1 limt→−1
y(t)
x(t)=−12et
limt→1y(t) +
1
2x(t) = lim
t→−1
t2 +1
2t− 1
2t+ 1
= −32
la droite d’équationy =−12x− 3
2est asymptote à Γ pour t→ −1tangente au point singulier M(0) = A(−1, 0)
91 lycée Dessaignes 2005-2006

−−−−−−−→M(0)M(h) =
2h
h+ 1−→e1 +
h2
h+ 1.−→e2 donc
−−−−−−−→M(0)M(h) =
√h4 + 4h2
h+ 1∼h→0 2 |h|
donc
limh→0+
−−−−−−−−−−−→M(t0)M(t0 + h)−−−−−−−−−−−→M(t0)M(t0 + h)
= 2.−→e1 , lim
h→0−
−−−−−−−−−−−→M(t0)M(t0 + h)−−−−−−−−−−−→M(t0)M(t0 + h)
= −2.−→e1
l’axe ( 0x) est donc tangent à la courbe Γ au point A.
15.2 Courbe définie par une représentation implicite
• Soit F : (x, y)→ F (x, y) une application de classe Ck définie sur un ouvert U de R2 , dont le gradient−−−−−−−−−→grad(F )(x, y) =
−−−−−−−−−−−−−−→(∂F
∂x(x, y),
∂F
∂y(x, y))
est non nul en tout point de UL’ensemble
Γ = M(x, y), (x, y) ∈ U et F (x, y) = 0est une partie du plan appelée courbe implicite d’équation F (x, y) = 0
• En tout pointM0 ∈ Γ la normaleN à Γ est la droite passant parM0 et dirigée par le vecteur−−−−−−−−−→grad(F )(M0) :
N =M0 + vect(−−−−−−−−−→grad(F )(M0))
• La tangente T à Γ au pointM(x0, y0) a pour équation:
(x− x0)∂F
∂x(M0) + (y − y0)
∂F
∂y(M0) = 0
par exemple considérons l’ellipse d’équation x2+1
2y2− 2 = 0 au point M0 = (1,
√2)−−−−−−−−−→grad(F )(M0) =
(2,√2): la normale est dirigée par (2,
√2)
et la tangente a pour équation cartésienne2(x− 1) +
√2(y −
√2) = 0
x 420-2-4
y
4
2
0
-2
-4
15.3 Courbe définie par une équation polaire
• Repère polaireSoit θ ∈ R. On appelle repère polaire d’angle θ le repère (O,−→u (θ),−→v (θ)) avec −→u (θ) = cos θ.
−→e1 +
sin θ.−→e2 et
−→v (θ) = − sin θ.−→e1 + cos θ.−→e2
∂−−→u(θ)
∂θ=−→v (θ) et
∂−−→v(θ)
∂θ= −−→u (θ)
92 lycée Dessaignes 2004-2005

• Equation polaire d’un arcSoient ρ et θ deux fonctions de classe Ck sur l’intervalle I . On considère le point P (t) défini pour toutes
les valeurs t ∈ I par −−−→OP (t) = ρ(t).
−→u (θ(t)) (1)
lorsque la fonction θ est bijective de I dans J , en posant θ = θ(t), P (t) = M(θ) et r(θ) = ρ(θ−1(θ))l’équation (1) est équivalente à
θ1 ∈ J et−−−−→OM(θ) = r(θ).
−→u (θ) (2)
l’équation (2) est une équation polaire de l’arcΓ = P (t), t ∈ I = M(θ), θ ∈ J
• Tangente à Γ en un point différent de l’origine OLa tangente à Γ au pointM(θ0) 6= O est dirigée par le vecteur non nul
∂−→M
∂θ(θ0) = r
0(θ0).−→u (θ0) + r(θ0).
−→v (θ0)
En notant V =\
(u(θ0),∂−→M
∂θ(θ0))
tan(V ) =r(θ0)
r0(θ0)cette valeur permet de récupérer l’angle V et ainsi de tracer la tangente à Γ
• Tangente à Γ en O =M(θ0)La tangente à Γ au pointM(θ0) = O est dirigée par le vecteur
−→u (θ0)
• symétries de Γr(−t) = r(t) symétrie par rapport à l’axe (Ox) :M(−t) = sOx(M(t))r(−t) = −r(t) symétrie par rapport à l’axe (Oy) :M(−t) = sOy(M(t))r(π − t) = r(t) symétrie par rapport à l’axe (Oy) :M(π − t) = sOy(M(t))r(π − t) = −r(t) symétrie par rapport à l’axe (Ox) :M(π − t) = sOx(M(t))r(π + t) = r(t) symétrie par rapport au point O :
−−−−−−−→OM(t+ π) = −
−−−−→OM(t)
r(π + t) = −r(t) on retrouve le même point!: M(t+ π) =M(t)
exemple : r(θ) = sin(2θ): On étudie le point M défini par−−−−→OM(θ) = sin(2θ).
−→u (θ)
r(θ + 2π) = r(θ) : l’étude se fait sur un intervalle de longueur 2πr(θ + π) = r(θ): la courbe présente une symétrie par rapport à O.r(−θ) = −r(θ): la courbe présente une symétrie d’axe Oysi l’on étudie Γ sur un l’intervalle [0,π/2] , en procédant à la symétrie sOy et la symétrie centrale sO on
récupère la courbe en entier :
r0(θ) = 2 cos(2θ):−−→∂M
∂θ= 2 cos(2θ)
−→u (θ) + sin(2θ).
−→v (θ) on a donc
tan(V ) =sin(2θ)
2 cos(2θ)
θ 0 .. π/4 ....π/2r0(θ) 2 + 0 −r(θ) 0 % 1 & 0tan(V ) ∞
la tangente au point M(π/4) est donc caractérisée par V = π/2puisque r(0) = r(π/2) = 0, la tangente au point M(0) = O de Γ est la droite (Ox) = O+vect(−→u (0))
93 lycée Dessaignes 2005-2006

et la tangente au point M(π/2) = O est la droite (Oy) = O + vect(−→u (π/2))
0.80.60.40.20-0.2-0.4-0.6-0.8
0.8
0.6
0.4
0.2
0-0.2
-0.4
-0.6
-0.8
r(θ) = sin(2θ)
16 Propriétés mètriques des courbes planes paramètrées
• Abscisse curviligneSoit Γ l’arc paramètré plan défini par la fonction f de classe Ck :
t ∈ I → f(t) =−−−−→OM(t)
Lorsque Γ ne contient aucun point singuliers ,la fonction t→−−→f 0(t) est strictement positive sur I
L’abscisse curviligne sur Γ avec origine en t0 ∈ I est l’application s définie par:
s : t ∈ I → s(t) =t
t0
−−→f 0(u) du
ds
dt=
−−→f 0(t)
• La longueur de l’arc Γ entre les paramètres t = t0 et t = t1 est donnée par
L =t1
t0
−−→f 0(u) du
En particulier l’abscisse curviligne sur Γ avec origine en t0 représente la longueur algèbrique de la partiede l’arc Γ comprise entre les valeurs t0 et t1 du paramètresi l’arc est donné en coodonnées cartésiennesM(t) = (x(t), y(t)) alors
L =t1
t0
x02(u) + y02(u)du
Si l’arc Γ est donné en coordonnées polaires−−−−→OM(θ) = r(θ).
−−→u(θ)
L =θ1
θ0
r2(θ) + r02(θ)dθ
• L’abscisse curviligne s définit un nouveau paramètrage de l’arc Γ, appelé paramètrage normal. On le notes→M(s). Avec ce nouveau paramètre s , le vecteur dérivé est unitaire ( la vitesse du pointM est constantepar rapport au paramètre s ) −−→
∂M
∂s= 1
exemple1 : −−−−→OM(t) = cos(t).e1 + (t− sin(t)).e2
ds
dt= sin2 t+ (1− cos t)2=
√2− 2 cos t= 2 sin(
t
2)
94 lycée Dessaignes 2004-2005

En prenant l’origine en t = 0, au point A(1, 0) , on a donc
s(t) =t
0
2 sin(u
2)du = 4− 4 cos( t
2)
s(t) représente la longueur de l’arc_
AM (t)voici la courbe correspondante appelée cycloïde (ici à l’envers , cette courbe est celle décrite par un point
lié à la circonférence d’ un cercle qui roule sans glisser sur un axe )
420-2-4
6
4
2
0
-2
-4
-6
cycloïdeexemple2 : −−−−→
OM(θ) = (1 + cos(θ)).−−→u(θ)
r 0(θ) = − sin θds
dθ=√2 + 2 cos θ= 2 cos(
θ
2)
En prenant l’origine en θ = 0 au point A(2, 0) on obtient
s(θ) =θ
0
cos(u
2) du = 4 sin(
θ
2)
voici la courbe correspondante
21.510.50
1
0.5
0
-0.5
-1
cardioïde• Repère de Frenet
Le vecteur−→T =
−−→dM
dsest un vecteur unitaire tangent au pointM(t) à l’arc Γ; on le nomme le premier
vecteur de Frenet.le vecteur unitaire normal à
−→T , tel que la base (
−→T ,−→N ) soit orthonormale directe est appelé second
vecteur de Frenetle repère (M(t),
−→T ,−→N ) est le repère de Frenet
Le vecteur−→T peut s’écrire
−→T = cos(α(t)).
−→e1 + sin(α(t)).
−→e2
où la fonction α est une fonction de classe Ck. α(t) représente l’angle\(−→e1 ,−→T ).
95 lycée Dessaignes 2005-2006

Dans ce cas le vecteur−→N s’écrit−→
N = − sin(α(t)).−→e1 + cos(α(t)).−→e2SiM(x, y) est le point courant de Γ alors
dx
ds= cos(α(t)),
dy
ds= sin(α(t))
• Courbure d’un arcLa courbure de l’arc Γ au pointM(t) est le réel
γ =dα
dsOn a les deux formules de Frenet −→
dT
ds= γ.
−→N
−→dN
ds= −γ.
−→T
• Rayon de courbureLe rayon de courbure enM(t) est l’inverse de la courbure enM(t)
R =1
γexemple : cherchons le rayon de courbure en un point de la cardioïde
r = 1 + cos θ
On a−→T =
dM
ds=dθ
ds× dMdθ
=1
2 cos(θ
2)
(− sin(θ).−−→u(θ) + (1 + cos(θ)).
−−→v(θ))
−→T = − sin(θ
2)−−→u(θ) + cos(
θ
2)−−→v(θ) = cos(
θ + π
2).−−→u(θ) + sin(
θ + π
2)−−→v(θ)
−→T = cos(θ +
θ + π
2).−→e1 + sin(θ +
θ + π
2).−→e2
Doncα(t) =
3θ
2+
π
2
γ =dα
ds=dα
dθ×dθds=
3
4 cos(θ
2)
R =4 cos(
θ
2)
3ce rayon correspond à celui du cercle tangent à Γ qui représente localement la meilleure approximation
de cet arc . Par exemple au point M(0) = A(2, 0), ce cercle a pour rayon4
3et il est centré sur l’axe Ox au
point Ω(2
3, 0)
de même au point M(π/2) = B(0, 1) , le rayon de courbure est égal à2√2
3,le vecteur normal est
−→N =
−√2
2−→e1 +
√2
2−→e2 . Le centre cercle a pour rayon
4
3et il est centré au point Ω0(
2
3,1
3)
96 lycée Dessaignes 2004-2005

x 21.510.50-0.5
y
1
0.5
0
-0.5
-1
cardioïde et cercles de courbure
97 lycée Dessaignes 2005-2006

Table des Matières
1 Nombres Réels2 Suites de nombres réels2-1 Suites convergentes2-2 Suites divergentes vers ±∞2-3 Relations de comparaison2-4 Suites usuelles
3 Fonctions réelles d’une vaeriable réelle3-1 Etude locale3-2
98 lycée Dessaignes 2004-2005