problemas de grupos de gomory y extensionesjaraoz/pdfs/tutorgrua.pdf · 1.1 tipos de problemas en...
TRANSCRIPT

Problemas De Grupos De Gomory Y Extensiones
Julian Araoz Dept. Estadıstica I Investigacio Operativa, UPC
Departament d’EIO. Seccio InformaticaUniversitat Politecnica de Catalunya
Junio 2002DR 2002/13

PROBLEMAS DE GRUPOS DE GOMORY
Y
EXTENSIONES
(Tutorial sobre los Semigrupos de Araoz)
Julian Araoz
Universidad Simon Bolıvar∗, Venezuela
Universitat Politecnica de Catalunya†, Spain
Julio 2002
2

ResumenEn este trabajo se presentan los resultados mas importantes de la teorıa de
Problemas de Grupos de Gomory y sus extensiones a semigrupos y sistemasaditivos generales y multivaluados.
Palabras Clave: Programacion Entera, Politopos, Problemas de Grupos,Subaditividad, Levantamiento de caras.
1 Introduccion
El objetivo de este trabajo es presentar la relacion que existe entre los Problemasde Programacion Entera y los de Optimizacion Sobre Semigrupos.
Se dan ejemplos aclaratorios y las definiciones formales de los elementosusados junto con sus propiedades mas importantes. Solo presentaremos losresultados dando las referencias a los trabajos donde estos se demuestran.
Un Problema de Programacion Entera consiste en optimizar un funcionallineal sobre un sistema de desigualdades lineales con la condicion de que lassoluciones sean enteras. Considerando la relajacion lineal del problema, es decirignoramos la condicion de que las variables sean enteras, aparecen solucionesoptimas fraccionarias que deben ser eliminadas.
Como ejemplo, consideremos el problemaMaximizar z = 2x1 + x2
∗Retired Professor Dpt. Procesos y Sistemas, with support from Conicit Proyect USB S1-
2000000438
†Visiting Professor Dpt. Estadıstica I Investigacio Operativa, Proyect PIV Dpt. dUniversitats,
Recerca i Societat
3
sobre el sistema de desigualdades linealesA) −x1 + 2x2 ≤ 4B) 5x1 + x2 ≤ 20C) 2x1 + 2x2 ≥ 7
x1 , x2 ≥ 0 y enteras
Las soluciones factibles a este problema, como se puede ver en la Figura 1,son (2,2); (2,3); (3,1); (3,2); (3,3) y (4,0), con optimo en el punto (3,3) con unvalor de 9.
Si consideramos la ralajacion lineal, es decir suprimimos la condicion de quelas variables tome valores enteros, el optimo esta en el punto (36/11,40/11)conun valor de 10.1818.
Pero la capsula convexa de este sistema esta dada por el sistemaD) x1 ≥ 2E) x2 ≤ 3F ) 3x1 + x2 ≤ 12G) x1 + x2 ≥ 4
y en este caso la ralajacion lineal nos da el optimo en el punto (3,3) conun valor de 9, como buscamos. En este caso, las desigualdades (E) y (F) sonlos cortes que necesitamos, ası, si agregamos estas desigualdades (E) y (F) alprimer sistema, obtendremos el sistema siguiente.
4

Maximizar z = 2x1 + x2
sobre el sistema de desigualdades lineales
A) −x1 + 2x2 ≤ 4B) 5x1 + x2 ≤ 20C) 2x1 + 2x2 ≥ 7E) x2 ≤ 3F ) 3x1 + x2 ≤ 12
x1 , x2 ≥ 0 y enteras
cuyo optimo es el que buscamos, en este sistema la desigualdad (B) es re-dundante.
Todas estas afirmaciones se pueden comprobar visualmente en la Figura 1.
1 2 3 4
1
2
3
4
- x1
6x2
����
���
������
���
DDDDDDDDDDDDDDDDDD
@@
@@
@@
@@
@@
@@
@@
A
B
C
BBBBBBBBBBBBBB@
@@
@@
@@
@@
DE
F
G
rA
AA
AA
10.18
AA
AAA
9
sq q s qq s s qq s s qq q q q
Figure 1: Poliedro Entero
La busqueda de estos cortes es la motivacion principal para el estudio de losproblemas sobre semigrupos.
Si conseguimos un sistema de desigualdades lineales que describan la capsulaconvexa de los puntos solucion convertimos el problema en uno de programacionlineal y podemos usar las herramientas poderosas de la Programacion Lineal.Los metodos mas poderosos de la Programacion Entera estan basados en des-cubrir Caras o por lo menos Cortes que ayuden a definir la Capsula Convexa[Nemhauser & Wolsey 88].
5

Estos problemas pueden ser interpretados en muchos casos como Problemasde Optimizacion sobre Semigrupos. Los Problemas de Optimizacion sobre Semi-grupos dan una mayor estructura que nos permite encontrar propiedades de lasdesigualdades validas y caras de estos problemas.
Esta teorıa que se conoce con el nombre de “Gomory’s Group Problems”y comienza con el famoso trabajo [Gomory 69]. La extension a semigrupos fuehecha por Araoz y Edmonds en [Araoz 74]. El libro [Johnson 80] esta basado enun curso dictado por Ellis Johnson en el que introduce la terminologıa Semigru-pos de Araoz y el cual es una buena introduccion al tema. La mayor parte deesta teorıa se ha desarrollado para semigrupos sin relacion de orden, pero a sidofacil extenderla a ordenados y de esta manera poder modelar mas problemas deProgramacion Entera y es por eso que presentaremos el problema mas generalaunque algunas de las referencias que damos solo tratan el problema sin orden.
1.1 Tipos de Problemas en Programacion Entera
Damos a continuacion un par de ejemplos tıpicos de Problemas de ProgramacionEntera
Ejemplo 1.1 Problemas de Cubrimiento por Subconjuntos:
Dada una familia F de subconjuntos de un conjunto X con un peso cj para
cada conjunto j en F , el Problema de Cubrimiento es encontrar una subfamilia
L de F que sea un cubrimiento de X y que minimize la suma de los pesos de
los conjuntos en L.
Los subconjuntos constituyen un semigrupo con el operador union y tiene
todas las propiedades que pediremos en un problema sobre semigrupos, son
finitos, abelianos y ordenados por inclusion y constituyen un caso tıpico de
Problemas de Optimizacion Sobre Semigrupos. Sin embargo estos problemas se
tratan habitualmente como un Problema de Programacion Entera usando los
vectores caracterısticos, ası, cada fila representa un punto de X y cada columna
un elemento de F .
6

Ejemplo numerico:
Sea X = {a, b, c} y F = {1, 2, 3} con 1 = {a, b}, 2 = {a, c} y 3 = {b, c}.
Queremos encontrar un cubrimiento con mınima cardinalidad. Los cubrimientos
corresponden a las subfamilias {1, 2}, {1, 3}, {2, 3} y {1, 2, 3}, a estas subfamilias
corresponden los vectores
1.2 1
1
0
1
0
1
0
1
1
1
1
1
donde cualquiera de los tres primeros es de cardinalidad 2 y corresponden
al mınimo buscado. Usando estos vectores, que suponemos de coordenadas
x1, x2, x3, podemos describir nuestro problema como un problema de progra-
macion lineal con soluciones enteras:
1.3 Minimizar x1 + x2 + x31 1 0
1 0 1
0 1 1
x1
x2
x3
≥
1
1
1
x1, x2, x3 ≥ 0 enteros.
Este problema admite mas soluciones enteras, cualquier vector entero con
7

dos o mas componentes positivas, como4
25
7
pero en el mınimo tendra uno de los vectores en 1.2.
Sin embargo, no podemos usar la teorıa de dualidad lineal, por estar usando
variables enteras. La relajacion de un programa de programacion entera corres-
ponde a eliminar las restricciones de ser enteros los valores en la solucion, ası
vale dualidad pero podemos introducir soluciones espurias, en nuestro caso, el
vertice x1 = x2 = x3 = 1/2 del sistema lineal da un solucion menor que 2, pero
no tiene coordenadas enteras. Gran parte del trabajo en Programacion Entera
consiste en encontrar que desigualdades agregar a nuestro sistema de manera
de eliminar las soluciones espurias de los vertices y poder usar todo el poder de
la Programacion Lineal, en otras palabras, encontrar la capsula convexa de las
soluciones enteras de 1.3.
8
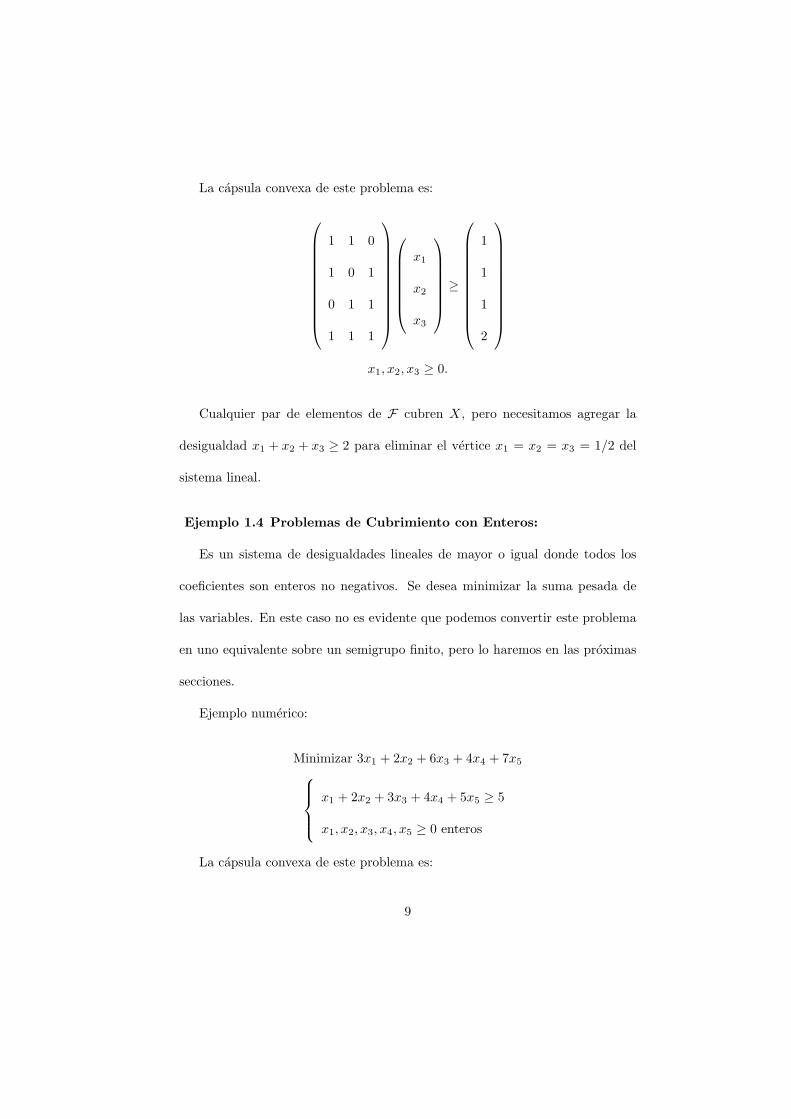
La capsula convexa de este problema es:
1 1 0
1 0 1
0 1 1
1 1 1
x1
x2
x3
≥
1
1
1
2
x1, x2, x3 ≥ 0.
Cualquier par de elementos de F cubren X, pero necesitamos agregar la
desigualdad x1 + x2 + x3 ≥ 2 para eliminar el vertice x1 = x2 = x3 = 1/2 del
sistema lineal.
Ejemplo 1.4 Problemas de Cubrimiento con Enteros:
Es un sistema de desigualdades lineales de mayor o igual donde todos los
coeficientes son enteros no negativos. Se desea minimizar la suma pesada de
las variables. En este caso no es evidente que podemos convertir este problema
en uno equivalente sobre un semigrupo finito, pero lo haremos en las proximas
secciones.
Ejemplo numerico:
Minimizar 3x1 + 2x2 + 6x3 + 4x4 + 7x5x1 + 2x2 + 3x3 + 4x4 + 5x5 ≥ 5
x1, x2, x3, x4, x5 ≥ 0 enteros
La capsula convexa de este problema es:
9

1 2 3 4 5
1 2 2 3 4
1 1 2 3 3
1 1 1 1 2
x1
x2
x3
x4
x5
≥
5
4
3
2
x1, x2, x3, x4, x5 ≥ 0
La mejor solucion es x1 = x3 = x5 = 0, x2 = x4 = 1 con valor 6, la solucion
x1 = x3 = x5 = x4 = 0, x2 = 2.5 con valor 5 es eliminada por la tercera
desigualdad.
2 Poliedros y Sistemas
En este seccion presentamos los conceptos y resultados del Algebra Lineal,Teorıa de Poliedros y Sistemas Aditivos Multivaluados, en funcion de establecerlas herramientas basicas de la Combinatoria de poliedros para la mejor com-preencion de este trabajo y aunque es mas extenso de lo necesario, pensamosson definiciones y propiedades utiles para el estudio de los poliedros.
2.0.1 Dependencia e Independencia Afın.
R denotara el cuerpo de los numeros reales. Para un entero positivo n, Rn
denotara el espacio n-dimensional sobre R. Y, 0 el vector nulo en Rn, es decir,el vector definido como (0)i = 0 para todo i ∈ {1, .., n}.
10

2.0.2 Independencia Lineal
Sea X ⊂ Rn, diremos que X es un conjunto linealmente independiente :
Si∑x∈X
λxx = 0 entonces λx = 0 para todo x ∈ X
De otra forma diremos que X es un conjunto linealmente dependiente.Una base para X, es un conjunto maximal de vectores en X los cuales son
linealmente independiente. Es conocido que todas las bases de X, tienen lamisma cardinalidad, a esta cardinalidad la llamaremos rango de X, y la deno-taremos con ran(X). El espacio nulo generado por X es el conjunto de vectoresy ∈ Rn tal que
x.y =n∑
i=1
xiyi = 0
para todo x ∈ X. El rango del espacio nulo generado por X, lo llamaremosnulidad, y lo denotaremos como nul(X). Es conocido que
nul(X) = n− ran(X)
2.0.3 Independencia afın
Diremos que X es un conjunto afinmente independiente:
Si∑x∈X
λxx = 0 y∑x∈X
λx = 0 entonces λx = 0, para todo x ∈ X
Es inmediato que todo conjunto linealmente independientes es afinmenteindependiente. De esto, definimos el rango afın de X, como la maxima cardi-nalidad de un subconjunto afinmente independiente de X, la cual denotaremoscon ra(X). Es claro que ran(X) ≤ n y que ra(X) ≤ n + 1.
Sea y ∈ Rn, diremos que y es una combinacion afın de vectores en X si ysolo si
y =∑x∈X
λxx y∑x∈X
λx = 1
El espacio afın generado por X es el conjunto de vectores en Rn que son com-binaciones afines de elementos en X.
Teorema 2.1 Un conjunto X de vectores afinmente independiente es lineal-
mente independiente si y solo si el origen no esta en el espacio afın generado por
X.
11

2.0.4 Conjunto convexo
Sea V ⊂ Rn, V es un conjunto convexo, si ρv1 + (1 − ρ)v2 ∈ V para todov1, v2 ∈ V y todo ρ ∈ [0, 1]
2.0.5 Cono convexo
Un subconjunto S de Rn es un cono, si para todo s ∈ S y todo ρ > 0 ρs ∈ S.Si, ademas, S es un conjunto convexo, diremos que S es un cono convexo.
2.0.6 Linealidad.
Sea C un cono. La linealidad de C es el conjunto
L(C) = {c ∈ C : −c ∈ C}
2.1 Capsula convexa y conica.
Sean V y E subconjuntos de Rn. Definimos la capsula convexa de V como elconjunto Conv(V ) definido por la expresion
Conv(V ) =
{x ∈ Rn : x =
∑v∈V
λvv tal que∑v∈V
λv = 1, 0 ≤ λv ≤ 1
}
Y la capsula conica de E como
Cone(E) =
{x ∈ Rn : x =
∑v∈E
λvv, λv ≥ 0
}
2.2 Cono generado y cono de recesion.
Sea S ⊆ Rn, definimos el cono generado por S, como
C(S) = {λs ∈ Rn : s ∈ S y λ > 0}
Y el cono de recesion de S es el conjunto definido por
Rec(S) = {y ∈ Rn : x + λy ∈ S, para todo x ∈ S y todo λ ≥ 0}
2.2.1 Clausura topologica.
Para S ⊂ Rn, con Cls(S) denotaremos la clausura topologica de S.
12
2.3 Poliedros y Caras.
Sea P ⊂ Rn, es un poliedro, si
P = {x ∈ Rn : Ax ≤ b}
para alguna matriz A de orden mxn, y algun vector b en Rm. Al sistema Ax ≤ blo llamaremos sistema de desigualdades que definen a P .
Sea I = {1, ..,m} el conjunto de indices de las desigualdades del sistemaAx ≤ b. Sea K ⊂ I, una cara de P es un poliedro F (K) definido como
F (K) = {x ∈ P : Aix = bi ∀i ∈ K}
En Pulleybank se prueba [Pulleyblank 74, teorema 2.1.5] que las caras de unpoliedro dependen solamente del poliedro y no de la desigualdades escogidaspara definir el poliedro. Claramente F (∅) = P y P es una cara de el mismo.Cualquier igualdad de P distinta de P la llamaremos cara propia de P .
Sea P un poliedro, para cualquier subconjunto S de P , existe un subconjuntoK ⊂ I, maximal con respecto a la inclusion, tal que S = F (K). Al conjunto Klo llamaremos, conjunto de igualdades de S y lo denotaremos como Iq(S). Esinteresante observar que para toda cara no vacıa F de P Iq(P ) ⊂ Iq(F ).
Sea v ∈ Rn y v0 ∈ R, (v0; v) es una desigualdad valida para el poliedro P sise verifica:
vx ≤ v0 para todo x ∈ P
El siguiente resultado relaciona igualdades con desigualdades validas.
Teorema 2.2 Un subconjunto F ⊆ P es una cara no vacıa de P si y solo
si existe una desigualdad valida (π0;π) de P , que se satisface como igualdad
solamente para los elementos de F .
A las desigualdades que verifican el teorema anterior las llamaremos carasinducidas, y diremos que la desigualdad induce a F .
Para un poliedro no vacıo P ⊂ Rn, nosotros definimos su dimension comon − ran(Iq(P )) y, la denotaremos con dim(P ). Si P = ∅, por convencion,dim(P ) = −1. Nosotros diremos que P tiene dimension completa si P es novacıo y el ran(Iq(P )) = 0. En este caso dim(P ) = n.
Teorema 2.3 dim(P ) + 1 = ran(P ).
13

Dada una igualdad F de P , nosotros diremos que F es una cara de P ,dim(F ) = dim(P )− 1. Una desigualdad la cual induce una cara la llamaremoscara inducida. Los dos resultados siguientes nos dan caracterizaciones para elmanejo de caras inducidas.
Teorema 2.4 Para todo poliedro P de dimension d, una desigualdad valida de
P es una cara inducida de P , si y solo si existen d elementos de P afinmente
independientes, los cuales satisfacen a dicha desigualdad como igualdad.
Dado un poliedro P cuyo conjunto de desigualdades I, existe un subconjuntoI ′ de I, minimal con respecto a la inclusion, tal que
P ′ = {x ∈ Rn : Aix ≤ bi ∀i ∈ I ′}
es igual a P . Es decir, que existe una caracterizacion minimal en funcion delconjunto de desigualdades, el siguiente teorema relaciona las caras inducidascon el conjunto de desigualdades.
Teorema 2.5 Sea P un poliedro e I el conjunto de desigualdades que lo definen.
Ademas, sea F j para todo j ∈ I, una cara no vacıa del poliedro P .
Para I ′ ⊂ I, sea P ′ el poliedro definido por I ′. P es igual a P ′ si y solo si
(i) ran(Iq(P ′)) = ran(Iq(P ))
(ii) I ′ ∩ (Iq(F j)− Ig (P )) 6= ∅ ∀j ∈ I
La primera condicion garantiza que P ′ y P tienen la misma dimension, mien-tras que la segunda garantiza que I ′ contiene por lo menos una cara inducidade todas las caras del poliedro P .
2.4 El Espacio de las Desigualdades Validas
Dado un poliedro P en Rn, denotaremos con V a el conjunto de las desigualdadesde P . Un vector v = (v0, v1, ..., vn) ∈ Rn+1 esta en V , si
n∑j=1
vjxj ≤ v0
14

para todo x ∈ PSea v ∈ V . Diremos que v esta en L(V ) si y solo si
n∑j=1
(−vj)xj ≥ −v0
para todo x ∈ P .Luego, la linealidad de V , es el conjunto de todas las igualdades que se
satisfacen para P . Diremos que L(V ) es el conjunto de las igualdades validasde P . Es claro que L(V ) es un subespacio vectorial de Rn+1, y necesariamenteel conjunto Iq(P ) tiene una base en L(V ).
Sea π ∈ V , diremos que π es una desigualdad valida extrema , si se verificaque: Si existen v1 y v2 en V tal que v = 1
2v1 + 12v2, entonces
v1 = αv + λ1
v2 = βv + λ2
donde α ∈ R+, β ∈ R+ y, λ1 y λ2 son igualdades validas en la linealidad de V.La situacion, en general, para un cono que posea linealidad es que al inter-
sectar el cono con el complemento ortogonal de la linealidad se tiene un conopuntiagudo generado por las combinaciones no negativas de sus rayos extremos.El cono original es generado por combinaciones lineales de la base de la lineal-idad, mas combinaciones no negativas de los rayos extremos. En terminos delcono original, no tenemos rayos extremos, pero en cambio tenemos semiespa-cios extremos de dimension dos o mayor. Estos semiespacios extremos puedenformarse sumando un rayo extremo con la linealidad. Ası, cualquier vector queeste en un semiespacio extremo, es tambien un vector extremo en el sentido dela definicion desigualdad valida extrema. El cono es igual a las combinacionesno negativas de rayos extremos. Cuando el cono tiene linealidad, la linealidades un subespacio y tiene una base finita. Las desigualdades validas extremaspuede tomarse modulo la linealidad, es decir, dos desigualdades extremas sonequivalentes: si una es un multiplo positivo de la otra, mas un vector en lalinealidad. (L,E) es una base para el cono, si L es la linealidad y E es unconjunto maximal de pares de no equivalentes vectores extremos que no estanen la linealidad.
Teorema 2.6 Una desigualdad valida es una cara inducida si y solo si es una
desigualdad valida extrema que no esta en L(V ).
15

3 Semigrupos Ordenados Abelianos
Sea (G, +) un Semigrupo Finito Abeliano, esto es, una operacion binaria aso-ciativa y conmutativa.
Asumcion 3.1 Asumimos que semigrupos se refiere a semigrupos que estan
definidos sobre un conjunto finito, ya que todos los utilizados lo son. Tambien
podemos asumir, sin perdida de generalidad, que el Semigrupo tiene un elemento
cero denotado por o.
Para cualquier entero positivo k y cualquier g en G se define k · g como
g+g+ · · · +g︸ ︷︷ ︸k veces
y 0 · g como o. Con esta operacion el Semigrupo define un semimodulo sobre losnumeros naturales [Zimmermann 81].
Un Semigrupo Ordenados (G, +,�) es un Semigrupo (G, +) con una relacionde orden parcial � entre sus elementos que satisface
g � g′, h � h′ =⇒ g+h � g′+h′, ∀g, g′, h, h′ ∈ G
Podemos incluir semigrupos sin relacion de orden definida usando el ordenidentidad g � h ⇐⇒ g = h que satisface trivialmente la condicion requerida,por lo tanto, si (G, +) es un semigrupo, (G, +,=) es un semigrupo ordenado.
3.2 Dado un elemento fijo b ∈ G, b 6= o, estamos interesados en las soluciones
a la desigualdad ∑g∈G
tg · g � b,
donde t(g) son enteros mayores o iguales a cero.
3.3 Sea b el elemento fijo. Denotamos por b ∼ g el conjunto de soluciones a
g+x � b.
16

Asumcion 3.4 Sea b el elemento fijo. Decimos que un elemento en g ∈ G es
infactible cuando no hay soluciones de g+x � b, esto es, b ∼ g = ∅. Podemos
asumir, sin perdida de generalidad, que el semigrupo tiene a lo sumo un elemento
infactible denotado por ∞. Tenemos que ∞+g = ∞, and g � ∞, ∀g ∈ G.
Cuando el conjunto b ∼ g tiene un elemento mınimo este es llamado elb-complemento de g y es denotado por g. Un semigrupo es complementariocuando todo elemento tiene un b-complemento, salvo ∞.
Ejemplo 3.5 Sea (G, +) un grupo Abeliano. (G, +,=) es complementario,
con b− g el b-complemento de g para cualquier b.
Ejemplo 3.6 Tenemos un semigrupo Abeliano ordenado (G(b), +,�), cuando
b es un vector en Nn, donde N son los numeros naturales, y definimos
G(b) = {g ∈ Nn| ~0 ≤ g ≤ b}
y g+g′ como min(g+g′, b), donde el mınimo se toma componente a componente,
finalmente � es el orden canonico parcial entre vectores enteros. El semigrupo
es complementario, con b− g el b-complemento de g.
Ejemplo 3.7 Otro semigrupo ordenado Abeliano es (G′(d), +,w), donde d es
un vector en Nn y definimos G′(d) = G(d)∪{∞}, con G(d) como en Ejemplo 3.6,
h+h′ por h+h′, cuando h+h′ ≤ d o como ∞ en los otros casos y w es el orden
inverso canonico parcial entre vectores enteros. El semigrupo es complementario,
con b− g el b-complemento de g.
Loss semigrupos en los ejemplos 3.6 y 3.7 son modelos de Programas Enteroscomo mostraremos en la seccion proxima.
17

4 Vectores Solucion y Capsula Convexa
Dado un elemento fijo b ∈ G+ y un conjunto H ⊆ G+ (donde denotamos G+
el conjunto de elementos propios G \ {o, ∞}), sea t un vector en NH , decimosque t es un vector solucion cuando∑
g∈H
t(g) · g � b.
Denotamos por TH(G, b) el conjunto de vectores solucion y por PH(G, b) lacapsula convexa de los vectores solucion.
Un Problema Sobre un Semigrupo Ordenado es el problema de minimizar unfuncional dado c ∈ RH sobre los vectores solucion, esto es, min
∑g∈H
c(g)t(g)
t ∈ TH(G, b)
Estamos interesados en PH(G, b) para usar las tecnicas de ProgramacionLineal.
Un Problema Sobre un Semigrupo Ordenado es Maestro cuando H = G+, eneste caso denotamos por T (G, b) el conjunto de vectores solucion y por P(G, b)la capsula convexa de vectores solucion.
Ejemplo 4.1 [Araoz 74] Dado un Problema de Cubrimiento Entero
Ax ≥ b, x ∈ Nn,
donde A es una matriz, b es un vector distinto de ~0 y todas las entradas en A y
b son enteros mayores o iguales a cero.
Denotando por H el conjunto de columnas de A tenemos que H ⊆ G(b), el
semigrupo correspondiente es (G(b), +,�) (Ejemplo 3.6), con b como elemento
fijo.
Ejemplo 4.2 [Araoz 74, Araoz 84] Dado un Problema de Empaquetamiento
Entero
Cx ≤ d, x ∈ Nn,
18
donde C es una matriz, d es un vector distinto de ~0 y todas las entradas en C
y d son enteros mayores o iguales a cero.
Denotando por H el conjunto de columnas de C tenemos que H ⊆ G(d), el
semigrupo correspondiente es (G′(d), +,w) (Ejemplo 3.7), con b como elemento
fijo.
Ejemplo 4.3 [Johnson 81] Dado un Problema de Particion Entera
Ex = f, x ∈ Nn,
donde E es una matriz, f es un vector distinto de ~0 y todas las entradas en E
y f son enteros mayores o iguales a cero.
Denotando por H el conjunto de columnas de E tenemos que H ⊆ G(f), el
semigrupo correspondiente es (G′(f), +,=), donde G′(f), con + definido como
en Ejemplo 3.7, con f como elemento fijo.
Ejemplo 4.4 [Araoz 93] Considerando cualquier Problema Entero de la forma
Ax ≥ b, Cx ≤ d, x ∈ Nn.
con todas las entradas en las matrices y vectores enteros mayores o iguales a cero.
Podemos combinar Ejemplo 4.1 y Ejemplo 4.2. El semigrupo correspondiente es
(G, +,w) que consiste de G = {(g, h)| g ∈ G(b), h ∈ G′(d)} con (g, h) +(g′, h′)
igual a (g+g′, h+h′) y (g, h)w(g′, h′) cuando g ≥ g′ y h ≤ h′ como vectores, esto
es, g � g′ y h w h′. (b, d) es el elemento fijo.
19

Ejemplo 4.5 [Araoz 93] Considerando cualquier Problema Entero de la forma
Ex = f, , Cx ≤ d, x ∈ Nn.
con todas las entradas en las matrices y vectores enteros mayores o iguales a
cero. Podemos combinar Ejemplo 4.2 y Ejemplo 4.3. El semigrupo correspon-
diente es (G, +,w) que consiste de G = {(g, h)| g ∈ G′(f), h ∈ G′(d)} con
(g, h) +(g′, h′) = (g+g′, h+h′) y (g, h)w(g′, h′) cuando g = g′ y h ≤ h′ como
vectores. (f, d) es el elemento fijo.
Hay que destacar que en Ejemplo 4.4 y Ejemplo 4.5, Problemas de Particiony Cubrimiento Enteros corresponden a que C sea la matriz identidad. Similar-mente, podemos modelar cualquier combinacion de desigualdades e igualdades=,≤,≥ en Programas Enteros con todas las entradas en las matrices y vectoresenteros mayores o iguales a cero.
Los problemas maestros para todos estos ejemplos son complementarios conb − g el b complemento de g. Sin embargo, en cualquiera de ellos podemostomar como maestro el subsemigrupo generado por las columnas de la matriz,que en general dara problemas mas pequenos, pero que no seran necesariamentecomplementarios
Ejemplo 4.6 Consideremos un Problema de Programacion Entera de la forma1 1 0
1 0 1
0 1 1
x1
x2
x3
≥
1
1
1
Este es un caso especial del ejemplo 4.1 y corresponde al ejemplo 1.1. El
semigrupo generado por las columnas de la matriz agrega ~0 y b. Por lo tanto,
para cualquier columna g de la matriz, tenemos b ∼ g consistiendo de las otras
dos columnas que no estan ordenadas entre si, es decir no tiene b-complemento.
20

5 El Cono Subaditivo
Dada una funcion π : G → {R ∪ {−∞}} decimos que π es monotona subaditivaen G cuando
π(o) = 0π(∞) = −∞π(g) + π(h) ≥ π(g+h) ∀ g, h ∈ G subaditividadπ(g) ≥ π(h) ∀ g, h ∈ G, tal que g � h monotonicidad
Denotamos el conjunto de todas las funciones monotonas subaditivas en Grestringidas a G+ por D(G) ⊆ RG+ , claramente cualquier vector π ∈ D(G+),si definimos π(o) = 0 y π(∞) = −∞, queda extendido a una funcion monotonasubaditiva.
El cono D(G) es poliedrico porque es el conjunto solucion del sistema finitohomogeneo π(g) + π(h)− π(g+h) ≥ 0 ∀ g, h, g+h ∈ G+
π(g)− π(h) ≥ 0 ∀ g, h ∈ G+, tal que g � h−π(h) ≥ 0 ∀ h ∈ G+, tal que o � h
Las otras combinaciones estan implıcitas.
Teorema 5.1 [Araoz 84] Para cualquier b ∈ G+ y π ∈ D(G) tenemos que
∑g∈G+
π(g)t(g) ≥ π(b)
es una desigualdad valida para PH(G, b)
5.1 Bases de Conos Poliedricos Convexos
Como estamos interesados en un sistema de desigualdades que defina a PH(G, b)y el Cono Subaditivo da desigualdades validas, para ver cuales necesitamos,presentamos aquı los resultados de conos que usamos.
Un Cono Poliedrico Convexo es el conjunto de soluciones a un sistema dedesigualdades homogeneas. Teorema 5.1 nos dice que los vectores del ConoSubaditivo nos dan desigualdades validas, pero ademas veremos que una Basedel mismo es suficiente para definir la Capsula Convexa del Problema de Semi-grupo. Para evitar nombres largos, cuando hablemos de cono asumimos unCono Poliedrico Convexo, ademas usamos vector o punto como equivalentes.
Sea C un cono, denotamos por LC la linealidad de C. Dos vectores x, y ∈ C,distintos de ~0, son equivalentes si uno es multiplo del otro mas un vector en la
21

linealidad. Escribimos x ' y cuando x y y son equivalentes. Un punto extremox es un vector que no es suma de dos vectores que no son equivalentes a x, esdecir, si x = x1 + x2 con x1 y x2 pertenecientes a C implica que para alguno(y por lo tanto ambos) xi = αix + `i, αi ≥ 0, `i ∈ LC , i = 1 o i = 2. Un rayoextremo de C esta formado por todos los multiplos no negativos de un puntoextremo.
Dados dos conjuntos finitos (E,B), el cono generado por (E,B) se obtienetomando todas las combinaciones lineales de puntos en E mas todas las combi-naciones no negativas de puntos en B, este cono se dice que es generado finita-mente, E genera la linealidad del cono. Un Teorema fundamental del algebrade conos establece que un cono es Generado Finitamente si y solo si es un ConoPoliedrico.
Una base (E,B) de C son dos conjuntos disjuntos contenidos en C tales queB es una base de LC y E es un conjunto de puntos extremos, no equivalentes dea pares, tales que para cualquier punto extremo de LC hay un punto equivalentea el en E. En este caso tenemos que C = cono(E) + lin(B), donde cono(E) es elcono generado por E y lin(B) es el subespacio generado por B. (recordemos quecono(∅) = lin(∅) = {~0}). En este caso (E,B) es una representacion minimal de C.Cuando LC = {~0}, E corresponde a un unico conjunto de rayos, en general loselementos de E son equivalentes uno a uno con la unica base de la interseccionde C con el complemento ortogonal de la linealidad de C. Para una discusionmas completa ver [Rockafellar 69].
5.2 Caracterizacion de la Capsula Convexa
En Teorema 5.1 vimos que todas las desigualdades correspondientes al ConoSubaditivo son validas. Aquı veremos que son todas las que necesitamos ademasde las triviales πx ≥ 0.
Teorema 5.2 [Araoz 84] Sea (E,B) una base de D(G). En este caso P(G, b)
es el poliedro solucion del sistemaρx = ρ(b), ∀ρ ∈ B
πx ≥ π(b), ∀π ∈ E
x ≥ 0
Algunas de las desigualdades πx ≥ π(b) pueden ser redundantes debido a lapresencia de las desigualdades triviales, sin embargo son faciles de caracterizar.
22

Decimos que un vector v no es minimal en D(G) si existe otro vector diferenteu en D(G) tal que u ≤ v con u(b) = v(b), sino decimos que v es minimal.Podemos hacer mas fuerte el teorema anterior si llamamos M al conjunto devectores minimales.
Teorema 5.3 [Araoz 84] Sea (E,B) una base de D(G). En este caso P(G, b)
es el poliedro solucion del sistemaρx = ρ(b), ∀ρ ∈ B
πx ≥ π(b), ∀π ∈ E ∩M
x ≥ 0
Donde M es el conjunto de vectores minimales. Ademas πx ≥ π(b) correspon-
den a caras del poliedro.
En el caso de que el semigrupo sea complementario, es posible incluir explıci-tamente la caracterizacion de los vectores minimales en el cono
DM(G) = D(G) ∩M
El cono DM(G) tambien es poliedrico porque es el conjunto solucion delsistema finito homogeneo
π(g) + π(h)− π(g+h) ≥ 0 ∀ g, h, g+h ∈ G+
π(g) + π(g)− π(b) = 0 ∀ g ∈ G+
π(g)− π(h) ≥ 0 ∀ g, h ∈ G+, tal que g � h−π(h) ≥ 0 ∀ h ∈ G+, tal que o � h
Ası obtenemos el siguiente teorema.
Teorema 5.4 [Araoz 93] Sea (E,B) una base de D(G) donde G es un semi-
grupo complementario. En este caso P(G, b) es el poliedro solucion del sistemaρx = ρ(b), ∀ρ ∈ B
πx ≥ π(b), ∀π ∈ E
x ≥ 0
Ademas πx ≥ π(b) corresponden a caras del poliedro.
23

6 Sistema de Desigualdades para PH(G, b)
Para PH(G, b) obtenemos un sistema borrando los coeficientes y variables queno estan en H, pero podemos obtener desigualdades redundantes aunque solose tomen caras del Problema Maestro.
Ejemplo 6.1 Problema No Maestro: Consideremos la desigualdad
2x + 3y + 5z ≥ 5
A esta desigualdad corresponde el Semigrupo Maestro
G = {0, 1, 2, 3, 4, 5} y en este caso H es {2, 3, 5}
Podemos reducir el numero de variables en el Poliedro Subaditivo usando
las igualdades
π5 = 1, π4 = 1− π1, π3 = 1− π2
y teniendo en cuenta que
πj + π5 ≥ π5 ⇒ πj ≥ 0
El desigualdades que quedan estan dadas en la Tabla 1.
24

a) 2π1 ≥ π2 ≡ 2π1 ≥ π2
b) π1 + π2 ≥ π3 ≡ π1 + 2π2 ≥ 1
a) π1 + π3 ≥ π4 ≡ 2π1 ≥ π2
b) 2π2 ≥ π4 ≡ π1 + 2π2 ≥ 1
c) π2 + π4 ≥ π5 ≡ π2 ≥ π1
d) 2π3 ≥ π5 ≡ π2 ≤ 1/2
e) π3 + π4 ≥ π5 ≡ π1 + π2 ≤ 1
f) 2π4 ≥ π5 ≡ π1 ≤ 1/2
Table 1: Desigualdades
25

Las caras del Poliedro Maestro corresponden a los vertices del sistema:
a) 2π1 ≥ π2
b) π1 + 2π2 ≥ 1
c) π2 ≥ π1
d) π2 ≤ 1/2
e) π1 + π2 ≤ 1 redundante
d) π1 ≤ 1/2 redundante
πj ≥ 0
Las caras del Semigrupo Maestro estan dadas en la Tabla 2. Los vertices
estan calculados en la Figura 2.
π1 π2 π3 π4 π5
A 1 2 3 4 5
B 1 2 2 3 4
C 1 1 1 1 2
D 1 1 2 2 3
Table 2: Caras
Eliminando las columnas correspondientes a las variables 1 y 4 obtenemos
un sistema para el problema con H = {2, 3, 5}.
26

A – 2x+ 3y+ 5z ≥ 5
B – 2x+ 2y+ 4z ≥ 4 redundante
C – x+ y+ 2z ≥ 2
D – x+ 2y+ 3z ≥ 3
x, y, z ≥ 0
Se observa que la desigualdad B es redundante, porque es la C multiplicada
por 2. Las desigualdades A, C y D corresponden a las caras.
15
14
13
12
13
25
12
- π1
6π2
rr r
r����
��
��
��
HHHHH
ad
c
b
A
B
C
D
Figure 2: Vertices
27

7 Levantamiento de Caras
Un problema importante para las aplicaciones es conseguir caras de un poliedrocuando se conoce una cara de otro poliedro de dimension menor. A este procesose le llama levantamiento de caras.
Supongamos que tenemos una funcion ϕ : G −→ G′ de un semigrupo G enun semigrupo G′ con orden de G mayor que orden de G′.
Dada π′ ∈ D(G′) decimos que π es el levantamiento de π′ si π(g) = π′(ϕ(g)).Denotando por g a ϕ(g) por simplicidad, si π′x ≥ π′(b) es una cara de
PG′+(G′, b), queremos saber cuando su levantamiento πx ≥ π(b) es una cara de
PG+(G, b), en este caso decimos que produce cara.Cuando ϕ es un homomorfismo entre Semigrupos Abelianos el levantamiento
de una cara es siempre una cara.Sin embargo pedir que ϕ sea un homomorfismo es demasiado porque hay
muchas otras funciones que producen caras. En el ejemplo siguiente veremosuna de esas funciones.
7.1 Problema de Particion de Mochila
Un Problema de Mochila es cuando el sistema esta compuesto por una soladesigualdad o igualdad, cuando es una igualdad se dice que es de Particion.
maxn∑
j=1
cjxj
n∑j=1
ajxj = b
xj ≥ 0, entero
Consideremos un Problema Maestro de Particion de Mochila:
maxb∑
g=1
cgxg
b∑g=1
gxg = b
xg ≥ 0, entero
y el Problema Maestro del Grupo Cıclico Modulo d:
28

+ a b ca b c ab b a ∞c o a ba � b � c � o
Table 3: Sistema Aditivo Ordenado
maxd−1∑g=1
c′gxg
d−1∑g=1
gxg = b mod d
xg ≥ 0, entero
Definiendo ϕ como g = ϕ(g) = g mod d obtenemos el teorema siguiente.
Teorema 7.1 [Araoz & Johnson 82b] Cuando d ≤ b b+22 c el Levantamiento de
Caras siempre produce Caras.
En [Araoz & Johnson 89] esta una discusion completa del Levantamiento deCaras.
8 Sistema Aditivo Ordenado
Cuando el semigrupo no es conmutativo nos encontramos con el problema deque a un punto t pueden corresponder varios elementos de G, segun las distintasexpresiones que podemos formar (ver [Araoz & Johnson 85]). Sin embargo lateorıa se extiende a sistemas de operaciones binarias sin pedir ninguna condicion,en este caso denotamos por θ(t) el conjunto de todos los elementos de G que lecorresponden a t. Para una discusion general, sin incluir orden, ver [Johnson 81]Veamos un ejemplo.
Ejemplo 8.1 Consideremos el sistema de la Tabla 3. Sea H = {a, b} y sea
t = (1, 1), en este caso tenemos que θH(t) = {a+b, b+a} = {c, b}.
29

+ a b c d ea a,b b,c c,d d,e eb b,c c,d d,e e ec c,d d,e e e ed d,e e e e ee e e e e e
e � d � c � b � a � o
Table 4: Sistema Aditivo Multivaluado Ordenado
Sea H ⊆ G+, t ∈ NH es un vector solucion cuando
b ∈ θH(t).
Teorema 8.2 [Araoz 84] Sea (E,B) una base de D(G). En este caso P(G, b)
es el poliedro solucion de el sistemaρx = ρ(b), ∀ρ ∈ B
πx ≥ π(b), ∀π ∈ E ∩M
x ≥ 0
Donde M es el conjunto de vectores minimales. Ademas πx ≥ π(b) correspon-
den a caras del poliedro.
9 Sistema Aditivo Multivaluado Ordenado
Sin embargo, estudiando el levantamiento de caras, aparecen sistemas muchomas generales para los cuales la teorıa sigue siendo valida. A estos sistemas losllamamos Sistemas Aditivos Multivaluados Ordenados. En ellos admitimos queel resultado de g+h sea un subconjunto de G. Los Sistemas Aditivos correspon-den a |g+h| = 1. Veamos un ejemplo.
Ejemplo 9.1 Consideremos el sistema de la Tabla 4.
30

Sea H = {a, b} y t = (1, 1), en este caso tenemos que
θH(t) = (a+b) ∪ (b+a) = {b, c}
Debemos en este caso definir de manera compatible los elementos usados.Suma de subconjuntos: Para F,H ⊆ G+, definimos
F +H =⋃
g∈F,h∈H
(g+h)
Orden de subconjuntos: Para F,H ⊆ G+, definimos
F � H ⇐⇒ ∀h ∈ H∃g ∈ F tal queg � h
Vectores solucion: Para H ⊆ G+, t ∈ NH es un vector solucion cuando
θH(t) � b.
Funciones monotonas subaditivas: Una funcion π : G → {R ∪ {−∞}} esmonotona subaditiva cuando satisface
π(o) = 0π(g) + π(h) ≥ max{π(f) : f ∈ (g+h)}π(g) ≥ π(h) g � hπ(∅) = −∞
EL ∅ juega el papel de ∞, ya que para todo H ⊆ G tenemos que H+∅ = ∅y H � ∅.
Teorema 9.2 Sea (E,B) una base de D(G). En este caso P(G, b) es el poliedro
solucion de el sistema ρx = ρ(b), ∀ρ ∈ B
πx ≥ π(b), ∀π ∈ E ∩M
x ≥ 0
Donde M es el conjunto de vectores minimales. Ademas πx ≥ π(b) correspon-
den a caras del poliedro.
31

9.1 Levantamiento de Caras con Sistemas Multivaluados
Dada una funcion ϕ : G → G, esta se extiende a subconjuntos definiendoϕ(H) = {ϕ(H) : h ∈ H}. ϕ es un submorfismo cuando satisface
1) ϕ(G) = G2) ϕ(o) = o3) ϕ(g+h) ⊆ ϕ(g)+ϕ(h)
La funcion ϕ de pagina 29 es un submorfismo.
Teorema 9.3 Sea ϕ es un submorfismo y π ∈ D(G). Entonces el levantamiento
π de π satisface π ∈ D(G).
ϕ es un casimorfismo cuando satisface
ϕ(ϕ−1(g)+ϕ−1(h)) ⊆ (g+h)
Los teoremas siguientes son resultados fundamentales en Levantamiento deCaras.
Teorema 9.4 Sea ϕ es un casimorfismo y sea π una cara de PG+(G, b), con
π(g) = π(h) siempre que ϕ(g) = ϕ(h).
Entonces π es el levantamiento de una cara de PG+(G, ϕ(b)).
Teorema 9.5 Sea π una cara de PG+(G, b). Definimos g = {h : π(h) = π(g)}
con g+h = {f : ∃g ∈ g, h ∈ h ∧ f ∈ g+h} y ϕ(g) = g.
Entonces ϕ es un casimorfismo de G en G y π es el levantamiento de una
cara de PG+(G, ϕ(b)). Es decir, toda cara que no tiene todos los coeficientes
diferentes proviene de un levantamiento.
10 Sistema Generador de Cortes
Nuestro interes es el de generar cortes al problema siguiente:
32

min cx
sujeto a: {ax = bx ∈ Nn (PI)
donde a ∈ Nn, c ∈ Rn y b ∈ N (N y R representan a los numeros enterospositivos y los numeros reales respectivamente).
SeaS = {x ∈ Rn : ax = b, x ≥ 0} ,
consideremos el siguiente problema:
min cxsujeto a : x ∈ S
(PR)
El problema (PR) es una relajacion del problema (PI). Sea x◦ una solucionoptima al problema (PR). Si x◦j ∈ N , para todo j ∈ {1, .., n} , x◦ es solucionoptima para el problema (PI). En el caso en que no sea, no se conocen metodospara resolver el (PI). A continuacion describimos un metodo para generar cortesprofundos del poliedro asociado al problema (PI). Para ello usaremos caras delpoliedro asociado al grupo cıclico que definimos en el Teorema 7.1.
El metodo queda descrito por la siguiente rutina recursiva, descrita a manolevantada, como un metodo de Bifurcacion y Corte.
Paso 1. Resolver el problema (PR).
Paso 2. Sea x◦ el optimo del PR, si x◦ ∈ Nn parar, tenemos la solucion optimaentera, sino continuar en el paso 3.
Paso 3. Elegir d entre 2 y b− 1 e ir al paso 4.
Paso 4. Busqueda del mejor corte: Para g de 1 hasta d hacer
cg =∑
aj=g mod d
x◦j
Resolver: min
d−1∑g=1
cgπ′(g)
π′(g) + π′(h) ≥ π′(g+h)π′(g) + π′(g) = 1π′(b) = 1
Ir al paso 5.
33

Paso 5. Sea π′ el vertice optimo del paso 4 y sea π su levantamiento es decirπj = π′
j mod d.
Entonces π es una cara del problema maestro, y∑πaj xj ≥ 1 es una desigualdad valida para el problema (PI).
Si∑
πaj x◦j ≥ 1 la desigualdad no es un corte, en este caso se puede
probar con otro valor de d (ir al paso 2) o ramificar por una componentefraccionaria de x◦ (ir al paso 7).
Si∑
πaj x◦j < 1 la desigualdad es un corte, en este caso ir al paso 6.
Paso 6. Hacer S = S ∪ {x ∈ Rn : πx ≥ 1}. Ir al paso 1.
Paso 7. Ramificar: Elegir un k entre 1 y n tal que x◦k no sea entero. Resolverdesde paso 1 con
S = S ∪ {x ∈ Rn : xk ≤ bx◦kc}
y conS = S ∪ {x ∈ Rn : xk ≥ dx◦ke}
Quedarse con la mejor de las dos soluciones.
11 Comentarios Finales
Este tutorial esta basado en los trabajos que realice, fundamentalmente, conJack Edmonds en mi tesis de doctorado y con Ellis Johnson con los trabajos quecomenzaron con [Araoz & Johnson 81] y que se desarrollaron extensivamente en[Araoz & Johnson 82a].
Estos resultados los he presentado en varias conferencias y cursos intensivos.En el anexo estan las copias de las transparencias usadas, el tiempo de pre-sentacion depende del detalle con que se describa el material.
Aunque el tema no esta de moda, creo que tiene muchas posibilidades dedesarrollo que no han sido explotadas. En los ultimos trabajos desarrollados,[Madriz & Araoz 01], [Araoz & Johnson 02] y [Araoz, Evans, Gomory & Johnson 03],se puede ver algunas de las lıneas a desarrollar.
Los resultados de la Seccion 9 para Sistemas Multivaluados, sin relacion deorden, estan desarrollados en [Araoz & Johnson 89]. Es facil extender esos re-sultados a Sistemas Multivaluados Ordenados. El estudio del levantamiento decaras para los distintos sistemas dista mucho de estar completamente desarrol-lados.
Tampoco hay mucho trabajo relacionando el levantamiento de caras dado pormetodos polares, ver [Araoz, Griffin & Edmonds 84], [Griffin 77] y [Griffin, Araoz & Edmonds 82],
34

con los metodos de levantamiento de caras descritos aqui. Solo conozco el tra-bajo [Madriz & Araoz 01] que utiliza la polaridad de levantamiento de [Araoz, Griffin & Edmonds 84]para probar metodos de levantamiento secuenciales de caras en problemas nomaestros.
Pero, sobre todo, el estudio de sistemas no maestros es muy embrionario,ver [Gastou 82] y [Madriz & Araoz 01],sin embargo es lo que esta mas cerca delas aplicaciones.
La propuesta de la Seccion 10 puede tener aplicaciones inmediatas. En estaseccion en el paso 3 es conveniente elegir d suficientemente pequenno, de maneraque resolver un sistema en d variables y del orden de d2 desigualdades sea facil.En este caso, como d sera mucho menor que b b+2
2 c, nos aseguramos que elcorte corresponde a caras del problema maestro. La determinacion de valoresapropiados de d es un problema abierto con muy buenas perspectivas.
Que un tema no este de moda le da una gran ventaja para elegirlo comotema de una tesis de doctorado, ya que de esta manera hay poco riesgo de quealguien se anticipe con los resultados.
Finalmente cabe mencionar que parte de este trabajo fue presentado en[Araoz 93].
35

References
[Araoz 74] J. Araoz. Polyhedral Neopolarities, Ph. D. thesis. Research ReportCS-74-10, Dept. of Computer Sciences, University of Waterloo, Wa-terloo, Canada (1974).
[Araoz 84] J. Araoz. “Packing Problems on Semigroup Programming”. Annalsof Discrete Mathematics 13 (1984) pp 1–22.
[Araoz 93] J. Araoz. “Complementary Ordered Semigroups Problems”. Pro-ceedings PANEL’93, editado por SADIO, Buenos Aires 1 (1993)pp 53–68.
[Araoz 93] J. Araoz, “Problemas de Optimizacion Sobre Semigrupos”. BO-LETIN Asociacion Matematica Venezolana, Vol.III pp 21–38.
[Araoz, Evans, Gomory & Johnson 03] J. Araoz, L. Evans, R. E. Gomory andE. L. Johnson, “Cyclic Group and Knapsack Facets”, aceptado enMathematical Programming.
[Araoz, Griffin & Edmonds 84] J.Araoz, V.Griffin and J. Edmonds, “Liftings ofFacets of Polyhedra”, Progress in Combinatorial Optimization, W.Pulleyblank edt., Academic Press, Canada (1984) pp 3–12.
[Araoz & Johnson 81] J.Araoz and E.L. Johnson, “Some Results on Polyhedraof Semigroup Problems”, SIAM J. on Algebraic and Discrete Meth-ods, V. 2 (1981) pp 244-258.
[Araoz & Johnson 82a] J.Araoz and E.L. Johnson, “Polyhedra of MultivaluedSystem Problems”, Report No.82229-OR, Institut fur Okonometrieund Operations Research, Bonn, W. Germany (1982).
[Araoz & Johnson 82b] J. Araoz and E. L. Johnson, “Mappings and Liftings forGroup and Semigroup Problems” Research Report 82231–OR, Inst.Operations Research, Bonn (1982).
[Araoz & Johnson 85] J. Araoz and E. L. Johnson. “Mapping and Facets ofNon-Abelian Group Problems”, SIAM J. on Algebraic and DiscreteMethods 6 (1985) pp 171–188.
[Araoz & Johnson 89] J. Araoz and E. L. Johnson, Morphic Liftings BetweenPairs de Integer Polyhedra.Research Report 89616–OR, Inst. Oper-ations Research, Bonn, (1989).
[Araoz & Johnson 02] “Sub-Additive Characterization of Ordered Semi-GroupsProblems”, J. Araoz and E. Johnson. Departament d’EIO. SeccioInformatica, Universitat Politecnica de Catalunya, DR 2002/02,(2002).
36

[Gastou 82] G. Gastou, On Facets of Integer Programming Polyhedra, Ph.D.Thesis, Administrative Sc. Dept., Yale University, New Haven(1982).
[Gomory 69] R. E. Gomory. “Some Polyhedra Related to Combinatorial Prob-lems”, Linear Algebra and Its Applications, (1969) pp 451–558.
[Griffin 77] V. Griffin, Polyhedral Polarity, Doctoral Thesis, University of Wa-terloo, Waterloo, Ontario (July 1977).
[Griffin, Araoz & Edmonds 82] V. Griffin, J. Araoz and J. Edmonds, “Polyhe-dral Polarity Defined a General Bilinear Inequality”, MathematicalProgramming, 23 (1982) 117-137.
[Johnson 80] E. L. Johnson. Integer Programming: Facets, Subbaditivity, andDuality for Group and Semigroup Problems, CBMS-NSF RegionalConference Series in Applied Mathematics 32, SIAM, Philadelphia,U.S.A. (1980).
[Johnson 81] E. L. Johnson.“On The Generality of The Subadditive Char-acterization of Facets”. Math. of Operations Research 6 (1981)pp 101–112.
[Madriz & Araoz 01] E. Madriz and J. Araoz, “Sequential Lifting for Non-Master Semigroup Problems”, ceptado en Investigacin Operativa,Revista de ALIO (Asociacin Latino-Ibero-Americana de InvestigacinOperativa).
[Nemhauser & Wolsey 88] G. Nemhauser and L. Wolsey. Integer Programmingand Combinatorial Optimization. North-Holland, Amsterdam, Hol-land (1988).
[Pulleyblank 74] W. Pulleyblank, The facets of Matchings Polyhedra, Thesis,University of Waterloo, Ontario (1974).
[Rockafellar 69] R. T. Rockafellar. Convex Analysis. Princenton UniversityPress, Princenton, New Jersey, U.S.A. (1969).
[Zimmermann 81] U. Zimmermann. Linear and Combinatorial Optimization inOrdered Algebraic Structures, Annals de Discrete Mathematics Se-ries, North-Holland, Amsterdam, Holland (1981).
37

Apendice
38