probabilistic parameter estimation of activated sludge processes using markov chain monte carlo
TRANSCRIPT

ww.sciencedirect.com
wat e r r e s e a r c h 5 0 ( 2 0 1 4 ) 2 5 4e2 6 6
Available online at w
ScienceDirect
journal homepage: www.elsevier .com/locate /watres
Probabilistic parameter estimation of activatedsludge processes using Markov Chain Monte Carlo
Soroosh Sharifi a,1, Sudhir Murthy b, Imre Takacs c, Arash Massoudieh a,*aCivil Engineering, The Catholic University of America, 630 Michigan Ave NE, Washington, DC 20064, USAbDC Water and Sewer Authority, 5000 Overlook Avenue, SW, Washington, DC 20032, USAcDynamita, 7 lieu-dit Eoupe, 26110 Nyons, France
a r t i c l e i n f o
Article history:
Received 15 August 2013
Received in revised form
23 November 2013
Accepted 5 December 2013
Available online 15 December 2013
Keywords:
ASM
Biological treatment
Bayesian
Markov Chain Monte Carlo
Uncertainty assessment
* Corresponding author.E-mail addresses: [email protected] (
1 Current address: School of Civil Engineer0043-1354/$ e see front matter ª 2013 Elsevhttp://dx.doi.org/10.1016/j.watres.2013.12.010
a b s t r a c t
One of the most important challenges in making activated sludge models (ASMs) applicable
to design problems is identifying the values of its many stoichiometric and kinetic pa-
rameters. When wastewater characteristics data from full-scale biological treatment sys-
tems are used for parameter estimation, several sources of uncertainty, including
uncertainty in measured data, external forcing (e.g. influent characteristics), and model
structural errors influence the value of the estimated parameters. This paper presents a
Bayesian hierarchical modeling framework for the probabilistic estimation of activated
sludge process parameters. The method provides the joint probability density functions
(JPDFs) of stoichiometric and kinetic parameters by updating prior information regarding
the parameters obtained from expert knowledge and literature. The method also provides
the posterior correlations between the parameters, as well as a measure of sensitivity of
the different constituents with respect to the parameters. This information can be used to
design experiments to provide higher information content regarding certain parameters.
The method is illustrated using the ASM1 model to describe synthetically generated data
from a hypothetical biological treatment system. The results indicate that data from full-
scale systems can narrow down the ranges of some parameters substantially whereas
the amount of information they provide regarding other parameters is small, due to either
large correlations between some of the parameters or a lack of sensitivity with respect to
the parameters.
ª 2013 Elsevier Ltd. All rights reserved.
1. Introduction
Since its introduction in 1987, IWA’s Activated Sludge Model 1
(ASM1) (Henze et al., 1987) and its successors have become
extensively popular for the design and optimization of bio-
logical treatment systems (Gernaey et al., 2004; Sin et al.,
S. Sharifi), arashmassoud
ing, University of Birminier Ltd. All rights reserve
2005). As mechanistic models, the main goal of ASMs is to
predict the performance of biological treatment processes in
removing organic matter and nutrients under different con-
ditions. When applying ASMs to design or optimize biological
treatment processes, it is important to recognize and quantify
the uncertainties associated with the model outputs (Belia
et al., 2009). The main sources of uncertainty in ASM
[email protected], [email protected] (A. Massoudieh).
gham, Edgbaston, Birmingham B15 2TT, UK.d.

wat e r r e s e a r c h 5 0 ( 2 0 1 4 ) 2 5 4e2 6 6 255
modeling can be categorized into four main groups (Cierkens
et al., 2012):
1) Model input data uncertainty, i.e., uncertainties associated
with influent characterization or environmental factors
such as temperature.
2) Uncertainty in model parameters.
3) Model structural error, due to the fact that the model is, at
best, an idealization of the real process.
4) Uncertainty associated with the numerical methods used
within the model (truncation errors).
Arguably, the most important challenge in making ASM
models usable in practice is attributing the values of its many
stoichiometric and kinetic parameters (Gernaey et al., 2004)d
hereafter, for the sake of simplicity, referred to as “parame-
ters”dwhich sometimes cannot be measured directly
(Weijers and Vanrolleghem, 1997). Usually, when ASMs are
used for practical purposes, the values of kinetic and stoi-
chiometric parameters, such as biomass growth rates, yield
coefficients, and half-saturation constants, are determined
based on the values provided in the literature. The literature
values are obtained through independent batch or other types
of experiments under controlled conditions or by using pre-
vious model calibrations based on data from full-scale sys-
tems. Because different parameter values are suggested by
different studies, a range of values for each parameter is often
reported (Jeppsson, 1996). These ranges are sometime so wide
that choosing different parameterswithin the range can result
in drastically different predictions. Lab experiments under
controlled conditions often require several series of mea-
surements of constituents of interest under a range of other
influencing factors, while keeping other factors constant
(Amano et al, 2002). The values obtained under these condi-
tions are not always applicable to full-scale bioreactors, due to
broader heterogeneities and the interactions of larger
numbers of components, including a more diverse set of
chemical and bacterial species. On the other hand, when
manual calibration is used to estimate ASMmodel parameters
using data collected from full-scale systems, it is not guar-
anteed that the obtained set of parameters is the only
parameter-set, resulting in reproduction of the observed data.
This problem has been referred to as non-uniqueness, lack of
identifiability, or equifinality (Beven and Freer, 2001). This is
due to the fact that ASMs are generally over-parameterized
with respect to the amount of data available for calibration,
and because, under certain operational bioreactor conditions,
the effluent characteristics can be insensitive to the values of
some of the parameters (Cierkens et al., 2012).
Automatic and semi-automatic deterministic methods
based on least-squares and maximum likelihood criteria (e.g.,
linearized maximum likelihood (Kabouris and Georgakakos,
1996a, b)) have been used to estimate the optimal values of
ASM parameters using observed data. Gradient-based (e.g.,
generalized reduced gradient method (Afonso and da
Conceicao Cunha, 2002)) and heuristic search methods (e.g.,
Simplex techniques (Cierkens et al., 2012)) have been used
extensively in the past to determine ASM parameters. Ayesa
et al. (1991) used the extended Kalman filter to estimate ASM
parameters as time-dependent parameters. Vanrolleghem
and Keesman (1996) compared a number of nonlinear
parameter estimation methods for identifying ASM parame-
ters and suggested the use of Monte Carlo simulations. Sin
et al. (2008) used a Monte Carlo-based search algorithm to
estimate the ASM parameters. Cox (2004) compiled a few da-
tabases containing the values of the parameters of ASM and
used a Bayesian approach to develop statistical distributions
for them. Gradient-based methods are prone to getting trap-
ped in a local optima (Abusam et al., 2001), and sometimes,
parameter values thatmay not be physically interpretable end
up being found (Weijers and Vanrolleghem, 1997). In addition,
while deterministic methods might provide a parameter set
that maximizes the chance of reproducing the observed data,
they are incapable of providing any reliability measure for the
estimated parameter values.
The complexity involved in the calibration of ASMs has led
to a number of protocols and guidelines for manual system-
atic calibration of full-scale ASM systems. BIOMATH (Petersen
et al., 2002; 2003; Vanrolleghem et al., 2003), STOWA (Hulsbeek
et al., 2002), HSG (Langergraber et al., 2004), WERF (Melcer
et al., 2003), and IWA’s STR (Rieger et al., 2012) are among
themost well-known protocols. These all consist of four main
steps: 1) characterizing influent wastewater; 2) constructing
dynamic influent loading data; 3) manual parameter estima-
tion; and 4) model validation. A critical comparison of these
methods can be found in (Sin et al., 2005).
Almost all of the approaches used for the automatic cali-
bration of ASMs have been deterministic so far with the
exception of the work of Juznic et al. (2001), who applied
Bayesian inference to estimate parameter uncertainty asso-
ciated with a revised version of ASM3 and showed its advan-
tage over some deterministic linear theory methods. In
deterministic parameter estimation approaches one set of
parameter values often as a results minimization between
some measures of misfit between the modeled and measured
results is obtained using a manual or automated optimization
technique. However, many sources of uncertainty and error,
including observation error, model structural error, errors
associated with input variables and external forcing, and
possible non-uniqueness of optimum parameters or lack of
sensitivity of the predicted effluent concentrations to certain
parameters under some conditions, are inevitably propagated
into the estimated parameters and need to be quantified.
Deterministic parameter estimation approaches provide a
single set of parameters, and it is not clear how much devia-
tion from those estimated values is still acceptable and what
the shape of the region of plausibility in the parameter space
looks like. Regardless of what calibration method is used,
parameter uncertainty is always present and eventually
transmits into model output uncertainty (Morgan and
Henrion, 1992). Using a single set of parameters to obtain
some model outputs could result in the sub-optimal design of
biological treatment systems, incorrect planning decisions,
and poor effluent water quality. Therefore, to use the ASMs
effectively for optimization of the operation and design of
biological treatment systems, it is necessary that the effects of
these uncertainties on the uncertainties of parameter esti-
mation to be quantified.
Various uncertainty quantification approaches have been
used in various scientific fields. These include local sensitivity
wat e r r e s e a r c h 5 0 ( 2 0 1 4 ) 2 5 4e2 6 6256
approaches based on multiple linear regression that are
established on the assumption of a linear dependence of the
model outputs and parameters (e.g. Hill and Tiedeman, 2007;
Foglia et al., 2009), global methods such as Generalized Like-
lihood Uncertainty Estimator, GLUE, (Beven and Freer, 2001)
and Bayesian inference. Local sensitivity analysis is not able to
capture the effects of non-linear dependence of outputs to the
parameters, but on the other hand, requires a much smaller
number of model runs to perform the uncertainty quantifi-
cation. The GLUE methodology uses a subjective measure of
likelihood based on a metric of goodness of fit to assign
different levels of confidence to different parameter sets. It
requires a large number of model evaluations to generate re-
alizations of model outputs using parameters sampled from
(often) uniform distributions over the plausible range of each
parameter. In the Bayesian approach the joint probability
distribution of parameters after conditioning them to the data
and prior knowledge about the parameters (referred to as
posterior distribution) is obtained based on the formal Bayes
theorem. Markov Chain Monte Carlo (MCMC) methods can
then be used to draw large number of samples from this
posterior distribution. The robustness of the Bayesian
approach compared to other methods has been demonstrated
in several studies (e.g Makowski et al., 2002; Gallagher and
Doherty, 2007). Both GLUE and MCMC approaches require a
much larger of model runs compared to the local sensitivity
methods.
Bayesian modeling allows incorporation of prior knowl-
edge regarding the parameters; for example, from past lab
experiments or ranges of parameters provided in the litera-
ture. The resulting joint PDFs of the parameters can be used in
conjunction with Monte Carlo simulation techniques to
perform probabilistic designs and controls of biological
treatment systems, while taking into consideration the
parameter uncertainty. Another advantage of Bayesian
parameter estimation is that, as further data is obtained, it can
be used to update the posterior parameter probability
distributions.
In this study, the development of a Markov Chain Monte
Carlo (MCMC) method based on Bayesian hierarchical
modeling for the probabilistic parameter estimation of acti-
vated sludge systems is described. To demonstrate the
application of the method, this is used for calibrating the
ASM1 using synthetic data obtained from a test case adopted
from the literature.
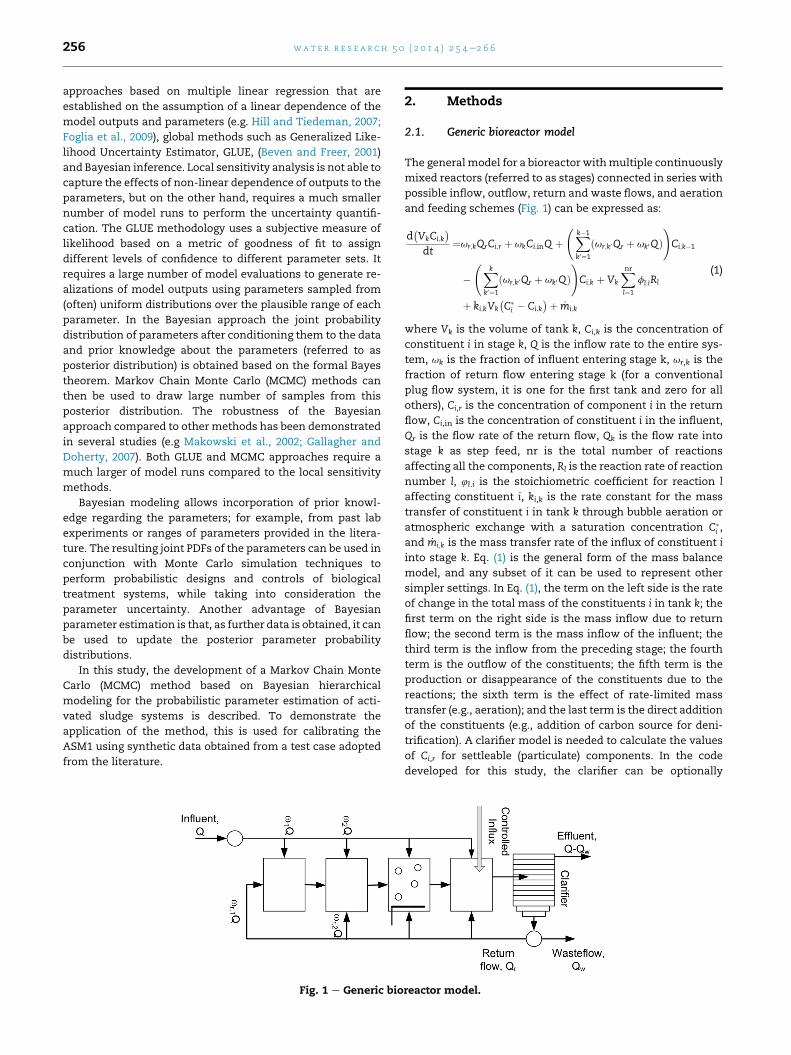
Fig. 1 e Generic bio
2. Methods
2.1. Generic bioreactor model
The generalmodel for a bioreactor withmultiple continuously
mixed reactors (referred to as stages) connected in series with
possible inflow, outflow, return and waste flows, and aeration
and feeding schemes (Fig. 1) can be expressed as:
d�VkCi;k
�dt
¼ur;kQrCi;r þ ukCi;inQ þ Xk�1
k0¼1
ður;k0Qr þ uk0QÞ!Ci;k�1
� Xk
k0¼1
ður;k0Qr þ uk0QÞ!Ci;k þ Vk
Xnrl¼1
fl:iRl
þ ki;kVk
�C�i � Ci;k
�þ _mi;k
(1)
where Vk is the volume of tank k, Ci,k is the concentration of
constituent i in stage k, Q is the inflow rate to the entire sys-
tem, uk is the fraction of influent entering stage k, ur,k is the
fraction of return flow entering stage k (for a conventional
plug flow system, it is one for the first tank and zero for all
others), Ci,r is the concentration of component i in the return
flow, Ci,in is the concentration of constituent i in the influent,
Qr is the flow rate of the return flow, Qk is the flow rate into
stage k as step feed, nr is the total number of reactions
affecting all the components, Rl is the reaction rate of reaction
number l, 4l.i is the stoichiometric coefficient for reaction l
affecting constituent i, ki,k is the rate constant for the mass
transfer of constituent i in tank k through bubble aeration or
atmospheric exchange with a saturation concentration C�i ,
and _mi;k is the mass transfer rate of the influx of constituent i
into stage k. Eq. (1) is the general form of the mass balance
model, and any subset of it can be used to represent other
simpler settings. In Eq. (1), the term on the left side is the rate
of change in the total mass of the constituents i in tank k; the
first term on the right side is the mass inflow due to return
flow; the second term is the mass inflow of the influent; the
third term is the inflow from the preceding stage; the fourth
term is the outflow of the constituents; the fifth term is the
production or disappearance of the constituents due to the
reactions; the sixth term is the effect of rate-limited mass
transfer (e.g., aeration); and the last term is the direct addition
of the constituents (e.g., addition of carbon source for deni-
trification). A clarifier model is needed to calculate the values
of Ci,r for settleable (particulate) components. In the code
developed for this study, the clarifier can be optionally
reactor model.

wat e r r e s e a r c h 5 0 ( 2 0 1 4 ) 2 5 4e2 6 6 257
represented by assuming zero solid concentration in the
effluent and quasi steady-state approximation (i.e. perform-
ing mass balance while ignoring the solid storage changes in
the clarifier), or by the dynamic clarifier model proposed by
Takacs et al. (1991). In addition, in the biological reaction
network used for modeling the reactors, the code allows any
reaction rate expression Rl and stoichiometric constant 4l.i to
be specified by the user as a function of concentrations of
components and model parameters.
2.2. Bayesian parameter estimation
Equation (1) can be expressed in a more general form as:
dCdt
¼ fðCðtÞ;UðtÞ;QÞ (2)
eCðtÞ ¼ gðCðtÞ; εÞ (3)
where C(t) is the state variable vector representing the con-
centrations of various components in the reactor (here also
referred to as the true concentration), U(t) is the input (or
external forcing vector), Q is the parameter vector, eCðtÞ is the
observed data vector, and ε contains some measures repre-
senting the random observation error. In Eqs. (2) and (3),
function f represents the bioreactor model structure, and g
represents the output error structure. When observations at
certain time intervals are available, eCðtÞ and C(t) can be rep-
resented as matrices, with eC ¼ ½~cij� containing the values of
observed constituents i at data point j, and C ¼ [cij] containing
modeled constituent concentrations at the same times.
The goal of stochastic parameter estimation is to find the
joint distribution of the parameters, Q, given observed
external forcing U(t) and observed values eC. In a Bayesian
framework, the joint probability distribution of the parame-
ters after incorporating the observations (posterior distribu-
tion) can be expressed through Bayes’ theorem (Kaipio and
Somersale, 2004):
P�Q;G
��eC� ¼ P�eC��Q;G
�$PðQ;GÞ
P�eC� (4)
where G ¼ [sik] is the variance-covariance matrix of the
observation error between the concentrations of different
constituents and its elements, with each element, sik, being
the covariance between the concentrations of constituents i
and k. In Eq. (4), the first term in the numerator on the right
side is the likelihood function that represents the probability
of seeing the observed concentrations, given the true values of
the parameters; the second term in the numerator is the prior
density, which contains the prior knowledge about the values
of the parameters; and finally, the denominator is a normal-
izing factor referred to as evidence. If we make an assumption
about the observed error structure, g, given the ASM, the
likelihood function can be expressed as:
P�eC��Q;G
�¼ P
heC��CðQ;UðtÞÞ;Gi
(5)
For example, if it is assumed that the observed error fol-
lows a Gaussian distribution, then the likelihood function can
be written as:
�e�� � 1
0B Xn �~Cj � Cj
�G�1
�~Cj � Cj
�T1C
P C C;G ¼ð2pjGjÞn=2exp@�j¼1
2A (6)
or if the error structure is assumed to be log-normal and
multiplicative, the likelihood function becomes:
P�eC��C;Gln
�¼ 1 Ym
i¼1
Ynj¼1
cij
1Að2pjGlnjÞn=2exp
�0@�
Xnj¼1
hln�~Cj
�� ln
�Cj
�iG�1
ln
hln�~Cj
�� ln
�Cj
�iT2
1A(7)
In Eq. (7), Gln is the variance-covariance matrix of the log-
transformed concentrations of constituent concentrations.
In practice, all of the elements of the variance-covariance
matrix need to be estimated using the MCMC approach.
Since this makes the total number of parameters to be esti-
mated very large and imposes a very large computational
burden, the observation errors are typically assumed to be
independent, and the correlation between the observed con-
centration errors are ignored (Walsh and Whitney, 2012). By
making this assumption, the variance-covariance matrix be-
comes a diagonal matrix:
G ¼
2664s21
s22
:s2m
3775 (8)
where si is the error standard deviation for constituent i. In a
log-normal multiplicative error structure for observed
concentrations:
Gln ¼
2664s2ln;1
s2ln;2
:s2ln;m
3775 (9)
where sln,i is the standard deviation of log-transformed con-
centrations of constituents i. Incorporating Eqs. (8) and (9) into
Eqs. (6) and (7), respectively, results in:
P�eC��C;G� ¼ 1
ð2pÞn=2�Ym
i¼1
si
!n exp
0@�Xnj¼1
Xmi¼1
�~cij � cij
�22s2
i
1A (10)
and
P�eC��C;Gln
�¼ 1 Ym
i¼1
Ynj¼1
cij
1Að2pÞn=2 Ym
i¼1
sln;i
!nexp
�0@�
Xnj¼1
Xmi¼1
�ln�~cij�� ln
�cij�2
2s2ln;i
1A (11)
Assuming that the prior distributions of the parameters are
also independent, the prior distribution can be written as:
PðQ;GÞ ¼Ymi¼1
PðqiÞ$Ymi¼1
P�sðlnÞi
�(12)
wat e r r e s e a r c h 5 0 ( 2 0 1 4 ) 2 5 4e2 6 6258
Furthermore, assuming that the prior distributions are
normal for some of the parameters and log-normal for others,
and considering the fact that no prior information about the
observation error standard deviations are available, Eq. (4) for
the two cases of normally and log-normally distributed
observation error becomes:
P�q1; q2;.; ql;G
��eC�f 1�Ymi¼1
si
!n exp
0@�Xnj¼1
Xmi¼1
�~cij � cij
�22s2
i
1A
�Yl1k¼1
e�ðqk�mkÞ2
2s2p;k
sp;k
Yl2k0¼1
e�ðln qk0 �mk0 Þ2
2s2p;k0
fk0sln;p;k0(13)
P�q1;q2;.;ql;GjeC�f 1�Ym
i¼1
sln;i
!nexp
0@�Xnj¼1
Xmi¼1
�ln�~cij��ln
�cij�2
2s2ln;i
1A
�Yl1k¼1
e�ðqk�mkÞ2
2s2p;k
sp;k
Yl2k0¼1
e�ðln qk0 �mk0 Þ2
2s2p;k0
fk0sln;p;k0(14)
where mk is the mean of the prior distribution of parameter qkand sp,k is its standard deviation.
In order to evaluate various moments or confidence in-
tervals of the posterior parameters, Eq. (4) needs to be inte-
grated over the domains of all parameters. Because it is not
feasible to do this practically, due to the large number of pa-
rameters, an MCMC method (Kaipio and Somersale, 2004;
Gamerman and Hedibert, 2006) is used to generate a large
number of samples from the posterior distribution. Having a
large number of samples according to the posterior distribu-
tion, we can effectively construct histograms representing
marginal distributions of the parameters. In this work, a
MetropoliseHastings algorithm (Metropolis et al., 1953) is used
to sample from Eqs. (13) or (14). The algorithm generates
Markov chains in which each new set of variables depends on
the previous set. The code developed in this study uses
normal or log-normal proposal densities Qðq0i; qkÞ according to
whether the prior densities of parameters are considered
normal or lognormal. The proposal densities are used to
generate proposal parameter sets Q0given the previous states
Qk. The proposal parameter set Q0is accepted as the next
value based on the following criteria:
Qkþ1 ¼
8><>:Q0 if Uð0;1Þ < min
PðQ0 ÞQðQ0 ;QkÞPðQkÞQðQk ;Q0Þ;1
�Qk otherwise
(15)
where U(0,1) is a uniformly distributed random number be-
tween 0 and 1 and P is the posterior probability density.
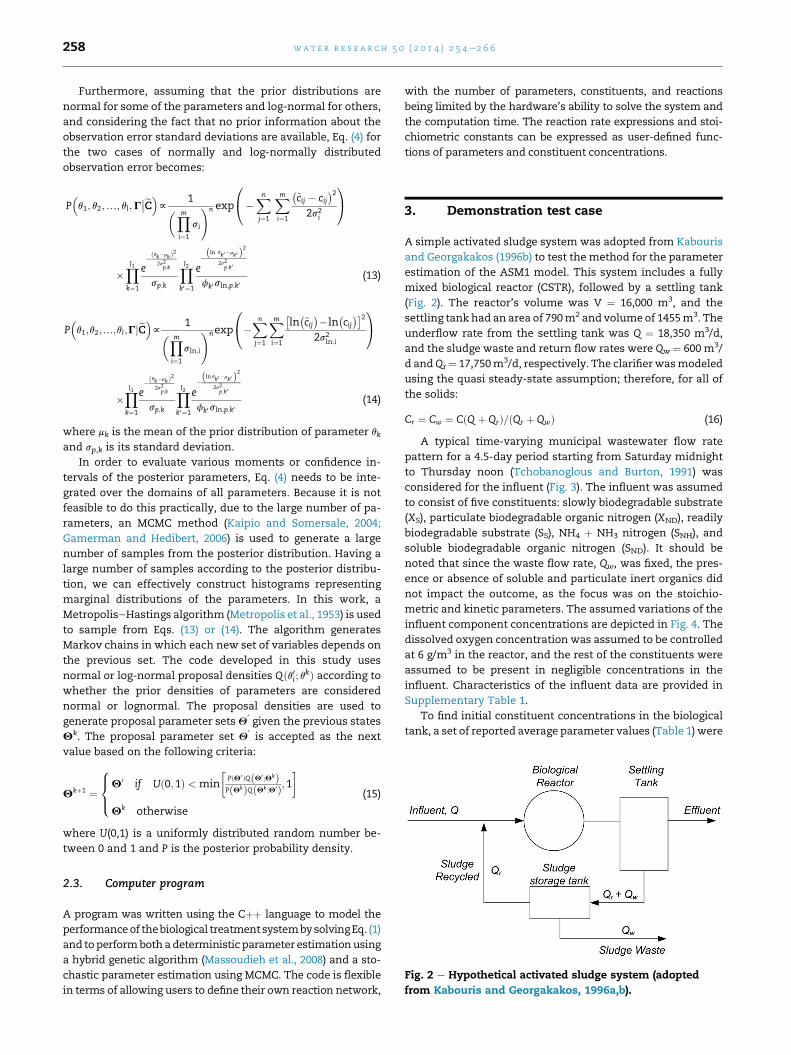
Fig. 2 e Hypothetical activated sludge system (adopted
from Kabouris and Georgakakos, 1996a,b).
2.3. Computer program
A program was written using the Cþþ language to model the
performanceof thebiological treatmentsystembysolvingEq. (1)
and to performboth adeterministic parameter estimationusing
a hybrid genetic algorithm (Massoudieh et al., 2008) and a sto-
chastic parameter estimation using MCMC. The code is flexible
in terms of allowing users to define their own reaction network,
with the number of parameters, constituents, and reactions
being limited by the hardware’s ability to solve the system and
the computation time. The reaction rate expressions and stoi-
chiometric constants can be expressed as user-defined func-
tions of parameters and constituent concentrations.
3. Demonstration test case
A simple activated sludge system was adopted from Kabouris
and Georgakakos (1996b) to test the method for the parameter
estimation of the ASM1 model. This system includes a fully
mixed biological reactor (CSTR), followed by a settling tank
(Fig. 2). The reactor’s volume was V ¼ 16,000 m3, and the
settling tank had an area of 790m2 and volumeof 1455m3. The
underflow rate from the settling tank was Q ¼ 18,350 m3/d,
and the sludge waste and return flow rates were Qw ¼ 600 m3/
d andQr¼ 17,750m3/d, respectively. The clarifierwasmodeled
using the quasi steady-state assumption; therefore, for all of
the solids:
Cr ¼ Cw ¼ CðQ þ QrÞ=ðQr þ QwÞ (16)
A typical time-varying municipal wastewater flow rate
pattern for a 4.5-day period starting from Saturday midnight
to Thursday noon (Tchobanoglous and Burton, 1991) was
considered for the influent (Fig. 3). The influent was assumed
to consist of five constituents: slowly biodegradable substrate
(XS), particulate biodegradable organic nitrogen (XND), readily
biodegradable substrate (SS), NH4 þ NH3 nitrogen (SNH), and
soluble biodegradable organic nitrogen (SND). It should be
noted that since the waste flow rate, Qw, was fixed, the pres-
ence or absence of soluble and particulate inert organics did
not impact the outcome, as the focus was on the stoichio-
metric and kinetic parameters. The assumed variations of the
influent component concentrations are depicted in Fig. 4. The
dissolved oxygen concentration was assumed to be controlled
at 6 g/m3 in the reactor, and the rest of the constituents were
assumed to be present in negligible concentrations in the
influent. Characteristics of the influent data are provided in
Supplementary Table 1.
To find initial constituent concentrations in the biological
tank, a set of reported average parameter values (Table 1) were

Fig. 3 e Influent wastewater flow.
wat e r r e s e a r c h 5 0 ( 2 0 1 4 ) 2 5 4e2 6 6 259
considered, and the ASM1was run to steady state using a fixed
flow rate and flow-weighted average inflow concentrations
until it reached steady-state conditions. Then, using the same
parameter set, the process was simulated using the varying
influent over a 4.5-day period, and a set of “perfect” mea-
surements for the effluent flow time series were obtained. To
generate a time series of realistic measured effluent concen-
trations, the measurements were “corrupted” by simulated
measurement noise. The noise was generated using a multi-
plicative and log-normally distributed first-order auto-
regressive (AR) process. The ARmodelwas used, as opposed to
white noise, in order to better resemble the model structural
error that is often auto-correlated (Yang et al., 2007). The noise
magnitude was selected to resemble the effects of the
different sources of uncertainties including the uncertainties
associated with observation error, model structural error and
input uncertainties in the model predictions. The developed
code can consider settling and aeration parameters as un-
known and estimate their distributions using observed data,
however, in the demonstration case here these parameters
were not included in the analysis.
4. Results
Tables 1 and 2 list the parameters and constituents, respec-
tively, of the ASM1. Eleven of the ASM1 parameters (values
specified as a range in Table 1) were considered parameters to
be estimated using the model, and the values of parameters
with single values (e.g., ka, kx) were considered fixed. It should
Fig. 4 e Concentration variation
be noted that other ranges for ASM1 parameters has been
proposed (e.g. Cox, 2004; Rieger et al., 2012; Benedetti et al.,
2012) in which the range of some of the parameters are
smaller and for some it is wider. Using alternative priors could
impact the estimated posterior parameter distributions. The
prior distributions of the parameters were considered log-
normally distributed with 95% confidence intervals given by
theminimum andmaximum ranges of the parameters shown
in Table 1. In this application, eight chains with a total length
of 5,000,000 samples were used, and the first 1,000,000 sam-
ples were disregarded as the “burn-in” period. The initial
conditions were established using the “true” parameter
values. The criteria suggested by Geweke and Tanizaki (2001)
were used to evaluate the convergence of the MCMC
algorithm.
Fig. 5 shows the obtained posterior distributions of the
ASM1 parameters. In this figure, the dashed line represents
the value of each parameter used to generate the synthetic
observation data, while the solid vertical line represents the
deterministic value of the parameter obtained using the ge-
netic algorithm through maximizing the likelihood function.
Due to a lack of sensitivity toward some of the parameters, a
possible correlation between the parameters, their non-
uniqueness, and the fact that genetic algorithms are not effi-
cient at finding the exact optima (Yuret, 1994), the determin-
istically estimated parameters do not match with the true
parameters. In addition, the noise added to the results of the
simulations used to generate the synthetic observation data
will result in parameter values different than the original
parameter values. However, as can be seen in Fig. 5, the his-
tograms representing the posterior distribution of the pa-
rameters are generally in good agreement with the true values
of the parameters. The level of confidence obtained for each
parameter depends on the confidence in the prior knowledge,
how much the value of that parameter can affect the effluent
concentration of water quality constituents and how close the
data on the effluent concentrations matches the expected
value of the predicted effluent concentrations. Table 3 con-
tains a measure of sensitivity of effluent constituent concen-
trations with respect to the parameters, as well as a measure
of the overall sensitivity of the model output with respect to
all the parameters, which is calculated as the sum of the
sensitivities of each constituent. The sensitivity of constituent
j with respect to parameter qi is calculated as:
s of influent components.

Table 1 e ASM1 model parameter ranges (Jeppsson, 1996).
Parameter Symbol Unit Literaturerange
Geometricaverage
Min Max
Stoichiometric parameters
Heterotrophic yield YH g cell COD formed (g COD oxidized)�1 0.380 e 0.750 0.534
Autotrophic yield YA g cell COD formed (g N oxidized)�1 0.070 e 0.280 0.140
Fraction of biomass yielding particulate products fP Dimensionless 0.080 0.080
Mass N/Mass COD in biomass ixB g N (g COD)�1 in biomass 0.086 0.086
Mass N/Mass COD in products from biomass ixP g N (g COD)�1 in endogenous mass 0.060 0.060
Kinetic parameters
Heterotrophic maximum specific growth rate mH 1/day 0.600 e 13.200 2.814
Heterotrophic decay rate bH 1/day 0.050 e 1.600 0.283
Half-saturation coefficient (hsc) for heterotrophs Ks g COD/m3 5 e 225 33.541
Oxygen hsc for heterotrophs KO,H g O2/m3 0.010 e 0.200 0.045
Nitrate hsc for denitrifying heterotrophs KNO g NO3eN/m3 0.100 e 0.500 0.224
Autotrophic maximum specific growth rate mA 1/day 0.200 e 1.000 0.447
Autotrophic decay rate bA 1/day 0.050 e 0.200 0.100
Oxygen hsc for autotrophs KO,A g O2/m3 0.400 e 2.000 0.894
Ammonia hsc for autotrophs KNH g NH3eN/m3 1.000 1.000
Correction factor for anoxic growth
of heterotrophs (mH)
sG Dimensionless 0.600 e 1.000 0.775
Ammonification rate ka m3/(g COD day) 0.080 0.080
Maximum specific hydrolysis rate kh g slowly biodeg. COD (g cell COD day)�1 3.000 3.000
Hsc for hydrolysis of slowly biodegradable substrate Kx g slowly biodeg. COD (g cell COD)�1 0.030 0.030
Correction factor for anoxic hydrolysis sh Dimensionless 0.400 0.400
wat e r r e s e a r c h 5 0 ( 2 0 1 4 ) 2 5 4e2 6 6260
I ¼Zts �
vln CjðtÞ�2
dt (17)
j;i0vln qi
and the overall sensitivity of the model results with respect to
parameter i is:
Ii ¼Xj
Ij;i (18)
It should be noted that the sensitivitymeasures introduced
in Eqs. (17) and (18) are local sensitivities and are only appli-
cable to the close neighborhood of the maximum likelihood
solution and do not intend to represent the global sensitivity.
These measures are intended to be loosely considered as
surrogates for the sensitivity with respect to the parameters.
As can be seen, the greatest sensitivity is with respect to
yield coefficient for autotrophs (YA) followed by decay rate of
heterotrophs (bH) yield coefficient for heterotrophs (YH) and
growth rate of autotrophs (mA). The main reason for the large
Table 2 e ASM1 constituents.
Constituent Symbol Unit
Non-biodegradable soluble COD SI g COD/m3
Readily biodegradable substrate SS g COD/m3
Particulate non-biodegradable COD XI g COD/m3
Slowly biodegradable substrate XS g COD/m3
Heterotrophic biomass XB,H g COD/m3
Autotrophic biomass XB,A g COD/m3
Inert particulate product produced XP g COD/m3
Dissolved oxygen SO g O2/m3
Nitrate SNO g N/m3
Ammonia nitrogen SNH g N/m3
Soluble biodegradable organic nitrogen SND g N/m3
Particulate biodegradable organic nitrogen XND g N/m3
overall sensitivitywith respect to (YA) is its effect on ammonia.
This means that data on ammonia, particularly when a high
variation in ammonia is present, contains a great deal of in-
formation for the estimation of YA. bH has a large impact on
several constituents including Ss, Snd and Xnd. The effect of
and YH are spread among Ss and Snh while mA has the highest
effect on ammonia. It should be noted that sensitivity with
respect to a certain parameter does not translate directly into
high estimability for that parameter, as a large correlation
between the parameter and another parameter with a lower
sensitivity can result in a lower estimability. For example,
although the sensitivity with respect to YA is high, its estim-
ability is low, as shown in Fig. 5. In addition, a wide level of
confidence is obtained for the parameter through inverse
modeling, indicating low confidence. The reason for this is the
high correlation of YA with mA and bA. As shown in Fig. 5, the
marginal posterior distributions of some parameters,
including KOH, YH, and bH, are narrow, in spite of wide ranges
attributed to them in their prior distribution and the noise
added to the result of the synthetic simulation. This is because
of their high level of sensitivity and the lack of correlation
with other parameters (Fig. 6). It can also be seen that for these
three parameters, the deterministically estimated parameter
value is close to the true value. The lack of sensitivity toward
Kno is due to the fact that the oxygen level in this numerical
experiment was kept high to ensure that denitrificationwould
not occur.
Fig. 6 shows the pair-wise scatter plot samples of param-
eter values, and Table 4 shows the Pearson correlation matrix
for the parameters. For some parameters, strong correlations
can be observed. For example, there is a near one correlation
between the substrate half-saturation constant, Ks and the
maximum specific growth rate for mH. This high correlation is
due to the fact that in this study, the readily available
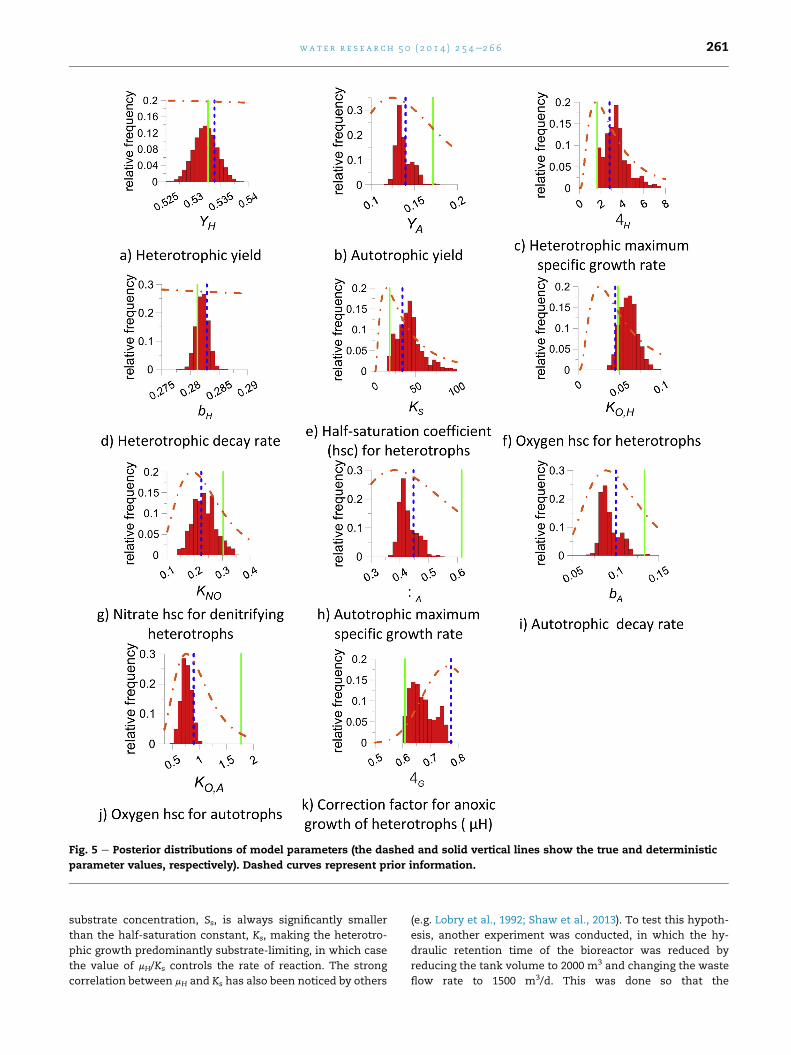
Fig. 5 e Posterior distributions of model parameters (the dashed and solid vertical lines show the true and deterministic
parameter values, respectively). Dashed curves represent prior information.
wat e r r e s e a r c h 5 0 ( 2 0 1 4 ) 2 5 4e2 6 6 261
substrate concentration, Ss, is always significantly smaller
than the half-saturation constant, Ks, making the heterotro-
phic growth predominantly substrate-limiting, in which case
the value of mH/Ks controls the rate of reaction. The strong
correlation between mH and Ks has also been noticed by others
(e.g. Lobry et al., 1992; Shaw et al., 2013). To test this hypoth-
esis, another experiment was conducted, in which the hy-
draulic retention time of the bioreactor was reduced by
reducing the tank volume to 2000 m3 and changing the waste
flow rate to 1500 m3/d. This was done so that the

Table 3 e Sensitivity matrix (overall rate of change of constituent concentrations with respect to the parameters).
YH YA mH bH Ks KO,H KNO mA bA KO,A sG
Si 0.00Eþ00 0.00Eþ00 0.00Eþ00 0.00Eþ00 0.00Eþ00 0.00Eþ00 0.00Eþ00 0.00Eþ00 0.00Eþ00 0.00Eþ00 0.00Eþ00
Ss 1.05E-01 2.76E-03 6.34E-02 1.03E-01 3.52E-03 2.47E-05 4.15E-10 1.83E-03 4.68E-04 3.59E-05 4.45E-06
Xi 0.00Eþ00 0.00Eþ00 0.00Eþ00 0.00Eþ00 0.00Eþ00 0.00Eþ00 0.00Eþ00 0.00Eþ00 0.00Eþ00 0.00Eþ00 0.00Eþ00
Xs 7.43E-03 4.11E-06 2.04E-07 5.96E-02 1.13E-08 4.92E-05 1.62E-10 9.54E-10 2.27E-05 1.83E-11 1.73E-12
Xbh 5.06E-02 6.22E-07 1.34E-06 1.66E-02 7.44E-08 1.59E-09 1.54E-14 3.37E-08 3.57E-06 6.62E-10 9.42E-11
Xba 9.88E-03 5.32E-02 2.58E-07 2.25E-03 1.43E-08 1.18E-10 9.56E-17 2.47E-05 3.04E-02 4.86E-07 4.89E-12
Xp 8.08E-04 2.11E-07 2.63E-08 4.34E-03 1.46E-09 4.11E-11 3.38E-16 2.95E-10 2.15E-06 5.79E-12 1.86E-12
So 2.30E-02 1.40E-04 8.52E-05 4.50E-03 4.92E-06 4.17E-06 2.93E-11 2.86E-05 5.04E-07 4.60E-07 3.18E-07
Sno 4.11E-02 3.61E-04 1.20E-06 9.35E-03 6.66E-08 2.71E-04 2.00E-09 1.10E-04 1.38E-05 2.17E-06 2.16E-05
Snh 1.37E-01 5.16E-01 1.90E-05 3.07E-02 1.06E-06 7.30E-07 5.60E-12 3.27E-01 9.39E-02 6.43E-03 6.20E-08
Snd 1.04E-02 1.48E-06 2.78E-07 9.69E-02 1.54E-08 4.41E-08 1.48E-13 1.40E-08 9.07E-06 2.74E-10 1.93E-11
Xnd 1.47E-02 6.78E-06 3.98E-07 9.09E-02 2.21E-08 4.91E-05 1.61E-10 2.24E-09 3.71E-05 4.35E-11 6.03E-12
S 4.00E-01 5.72E-01 6.35E-02 4.18E-01 3.53E-03 3.99E-04 2.77E-09 3.29E-01 1.25E-01 6.47E-03 2.64E-05
Fig. 6 e Pair scatter plots of the parameters of the model.
wat e r r e s e a r c h 5 0 ( 2 0 1 4 ) 2 5 4e2 6 6262

Table 4 e Correlation matrix of ASM1 parameters.
YA �0.147
mH �0.006 0.023
bH 0.376 �0.280 0.006
Ks �0.016 0.025 1.000 �0.002
KO,H �0.517 �0.024 0.021 �0.287 0.025
KNO �0.012 �0.382 0.394 0.078 0.394 0.118
mA �0.186 0.976 0.032 �0.279 0.034 0.008 �0.449
bA �0.196 0.990 0.015 �0.284 0.017 0.002 �0.382 0.974
KO,A �0.053 0.206 0.063 �0.074 0.064 0.055 �0.435 0.405 0.207
sG �0.158 �0.166 �0.049 0.078 �0.046 �0.047 0.194 �0.165 �0.153 �0.081
YH YA mH bH Ks KO,H KNO mA bA KO,A
wat e r r e s e a r c h 5 0 ( 2 0 1 4 ) 2 5 4e2 6 6 263
concentration of readily biodegradable COD would vary be-
tween 14 g [COD]/m3 and 46 g [COD]/m3, and therefore, have a
value comparable to the half-saturation constant, Ks. Fig. 7
shows that although the correlation between mH and Ks is
still large, it is smaller than the original case, when Ss was
substantially smaller than Ks, thus indicating that the estim-
ability of both parameters improved substantially. This shows
that the estimability of the parameters depends on the oper-
ational condition of the bioreactor, and that a better estim-
ability can be obtained by collecting data from plants under
different operating conditions or designing experiments that
isolate the parameters in question. Although performing such
experiments may not be feasible on a full scale reactor, the
information made available in the posterior correlation anal-
ysis (Fig. 6) is useful for designing pilot experiments that has
more information content for specific parameters.
Fig. 8 shows the observed vs. modeled concentrations for
selected effluent constituents. The modeled concentrations
are the result of running the ASM1 model using 50 parameter
sets sampled from parameter posterior distributions. The 50
realizations are only for presentation purpose. A larger num-
ber of realizations is needed if the intention is to find confi-
dence brackets for the predicted concentrations, for example
for the purpose of chance-constrained design or optimization.
The constituents not shown in this figure match the observed
data relatively closely. Although not shown here, themodeled
constituent concentration curves follow very closely the true
simulated concentration (prior to adding noise) that was used
to build the synthetic observed data that was created by
adding noise to it.
Fig. 7 e Scatter plot of posterior samples of mH versus Ks
and marginal posterior densities of Ks and mH for the high
substrate experiment. In this case, Ss varies between 14
and 46 g [COD]/m3.
Fig. 9 shows the normalized 95% credible intervals of ASM1
model parameters linearlymapped to a 0e100% scale, with 2.5
being the minimum and 97.5 the maximum prior range of the
parameters (horizontal lines) (e.g. xposterior;2:5 ¼ 2:5þ95ðxposterior;2:5 � xprior;2:5Þ=ðxprior;97:5 � xprior;2:5Þ).The mapping is
done in order to make the presentation easier. The results are
shown for the case in which the true synthetic observed data
was corrupted by the original noise magnitude and for the
case in which the noise was increase by a factor of four, in
order to evaluate the effect of measurement uncertainty on
the estimability of the parameters. As can be seen, increasing
the noise by a factor of four does not affect the estimability of
the three parameters, which were originally highly estimable
(YH, bH, and KO,H), but it widens the credible intervals of some
of the less estimable parameters substantially.
5. Summary and conclusions
In this paper, a Bayesian parameter estimation framework for
the calibration of ASM was presented. The method employs a
Markov Chain Monte Carlo based approach to derive the
posterior PDF of the model parameters. The advantages of the
proposed method are:
1) In contrast to deterministic methods, which provide point
estimates of the model parameters, the proposed method
provides the joint probability distribution of parameters
and their correlation. The PDFs can be used in a Monte
Carlo simulation for uncertainty analysis, chance
constraint design, and optimization of wastewater treat-
ment plants.
2) The expert knowledge and degree of belief regarding the
parameters is incorporated in the parameter estimation as
prior functions. Following this approach, parameter
updating becomes possible as further data is collected.
3) Evaluation of the posterior correlations between the pa-
rameters and the constituenteparameter sensitivity ma-
trix can guide us to the experimental conditions that result
in better estimability of the parameters.
Sensitivity analysis on the parameters indicates that for
this particular test case, the ASM1 model was most sensitive
to five of its 11 estimated parameters: YA, bH, YH, and mA,. The
estimability of the parameters was controlled by their
sensitivity and the posterior correlation between the pa-
rameters and other parameters, and the variability in the

Fig. 8 e Observed vs. modeled concentrations for selected effluent components.
wat e r r e s e a r c h 5 0 ( 2 0 1 4 ) 2 5 4e2 6 6264
observed constituents to which the parameters exhibited
high sensitivity. The sensitivity depends on the ranges of
concentrations of the constituents in the reactor used for
model calibration. The results of the hypothetical simulation
presented in this paper show high correlations between
some of the parameters; for example, a posterior correlation
of close to one between mH and Ks, and therefore, a low
estimability for the two parameters was observed. However,
Fig. 9 e Normalized 95% credible intervals of ASM1
parameters.
it was shown that operating the reactor in a different con-
dition can reduce the correlation and enhance the estim-
ability of the parameters.
Acknowledgement
This project was supported by the District of Columbia Water
and Sewer Authority (DCWASA) and partially by DC Water
Resources Research Institute (DCWRRI).
Appendix A. Supplementary data
Supplementary data related to this article can be found at
http://dx.doi.org/10.1016/j.watres.2013.12.010
r e f e r e n c e s
Abusam, A., Keesman, K., Van Straten, G., Spanjers, H., et al.,2001. Parameter estimation procedure for complex non-linear

wat e r r e s e a r c h 5 0 ( 2 0 1 4 ) 2 5 4e2 6 6 265
systems: calibration of ASM No. 1 for N-removal in a full-scaleoxidation ditch. Water Sci. Technol., 357e365.
Afonso, P., da Conceicao Cunha, M., 2002. Assessing parameteridentifiability of activated sludge model number 1. J. Environ.Eng. 128 (8), 748e754.
Amano, K., Kageyama, K., Watanabe, S., Takemoto, T., 2002.Calibration of model constants in a biological reaction modelfor sewage treatment plants. Water Res. 36 (4), 1025e1033.
Ayesa, E., Florez, J., Garcıa-Heras, J.L., Larrea, L., 1991. State andcoefficients estimation for the activated sludge process usinga modified Kalman filter algorithm. Water Sci. Technol. 24 (6),235e247.
Belia, E., Amerlinck, Y., Benedetti, L., Johnson, B., et al., 2009.Wastewater treatment modelling: dealing with uncertainties.Water Sci. Technol. 60 (8), 1929.
Benedetti, L., Batstone, D.J., De Baets, B., Nopens, I.,Vanrolleghem, P.A., 2012.Uncertainty analysis ofWWTP controlstrategies made feasible. Water Qual. Res. J. Can. 47 (1), 14e29.
Beven, K., Freer, J., 2001. Equifinality, data assimilation, anduncertainty estimation in mechanistic modelling of complexenvironmental systems using the GLUE methodology. J.Hydrol. 249 (1), 11e29.
Cierkens, K., Plano, S., Benedetti, L., Weijers, S., et al., 2012.Impact of influent data frequency and model structure on thequality of WWTP model calibration and uncertainty. WaterSci. Technol. 65 (2), 233e242.
Cox, C.D., 2004. Statistical distributions of uncertainty andvariability in activated sludge model parameters. WaterEnviron. Res. 76 (7), 2672e2685.
Foglia, L., Hill, M.C., Mehl, S.W., Burlando, P., 2009. Sensitivityanalysis, calibration, and testing of a distributed hydrologicalmodel using error-based weighting and one objectivefunction. Water Resour. Res. 45 (6), W06427.
Gallagher, M., Doherty, J., 2007. Parameter estimation anduncertainty analysis for a watershed model. Environ. Model.Software 22 (7), 1000e1020.
Gamerman, D., Hedibert, F.L., 2006. Markov Chain Monte Carlo e
Stochastic Simulation for Bayesian Inference, second ed.Chapman & Hall/CRC.
Gernaey, K.V., van Loosdrecht, M., Henze, M., Lind, M., et al., 2004.Activated sludge wastewater treatment plant modelling andsimulation: state of the art. Environ. Model. Software 19 (9),763e783.
Geweke, J., Tanizaki, H., 2001. Bayesian estimation of state-spacemodels using the MetropoliseHastings algorithm within Gibbssampling. Comp. Stat. Data Anal. 37 (2), 151e170.
Henze, M., Grady Jr., C.P.L., Gujer, W., Marais, G.V.R., et al., 1987.Activated Sludge Model No. 1. IAWQ, London, Great Britain.
Hill, M.C., Tiedeman, C.R., 2007. Effective Calibration ofGroundwater Models, with Analysis of Data, Sensitivities,Predictions, and Uncertainty. John Wiely, New York, p. 455.
Hulsbeek, J., Kruit, J., Roeleveld, P., Van Loosdrecht, M., 2002. Apractical protocol for dynamic modelling of activated sludgesystems. Water Sci. Technol. 45 (6), 127e136.
Jeppsson, U., 1996. Modelling Aspects of Wastewater TreatmentProcesses. Ph.D. thesis. Lund Institute of Technology, Sweden.Available from: http://www.iea.lth.se/publications.
Juznic, Z., Flotats, X., Magrı, A., 2011. Model parameter uncertaintyestimation based on Bayesian inference for activated sludgemodel under aerobic conditions: a comparison with a lineartheory method. In: 8th IWA Symposium on Systems Analysisand Integrated Assessment. Internatinal Water Association(IWA), San Sebastian, pp. 428e435.
Kabouris, J.C., Georgakakos, A.P., 1996a. Parameter and stateestimation of the activated sludge processeI. Modeldevelopment. Water Res. 30 (12), 2853e2865.
Kabouris, J.C., Georgakakos, A.P., 1996b. Parameter and stateestimation of the activated sludge process: on-line algorithm.Water Res. 30 (12), 3115e3129.
Kaipio, J., Somersale, E., 2004. Statistical and ComputationalInverse Problems. In: Applied Mathematical Sciences, vol. 160.Springer.
Langergraber, G., Rieger, L., Winkler, S., Alex, J., et al., 2004. Aguideline for simulation studies of wastewater treatmentplants. Water Sci. Technol. 50 (7), 131e138.
Lobry, J.R., Flandrois, J.P., Carret, G., Pave, A., 1992. Monod’sbacterial growth model revisited. Bull. Math. Biol. 54 (1),117e122.
Makowski, D., Wallach, D., Tremblay, M., 2002. Using a Bayesianapproach to parameter estimation; comparison of the GLUEand MCMC methods. Agronomie 22 (2), 191e203.
Massoudieh, A., Mathew, A., Ginn, T.R., 2008. Column and batchreactive transport experiment parameter estimation using agenetic algorithm. Comput. Geosci. 34, 24e34. http://dx.doi.org/10.1016/j.cageo.2007.02.005.
Melcer, H., Dold, P.L., Jones, R.M., Bye, C.M., et al., 2003. Methodsfor Wastewater Characterisation in Activated SludgeModeling. Water Environment Research Foundation (WERF),Alexandria, VA, USA.
Metropolis, N., Rosenbluth, A.W., Rosenbluth, M.N., Teller, A.H.,Teller, E., 1953. Equations of state calculations by fastcomputing machines. J. Chem. Phys. 21 (6), 1087e1092.
Morgan, M.G., Henrion, M., 1992. Uncertainty: a Guide to Dealingwith Uncertainty in Quantitative Risk and Policy Analysis.Cambridge Univ Pr.
Petersen, B., Gernaey, K., Henze, M., Vanrolleghem, P., 2003.Calibration of Activated Sludge Models: A Critical Review ofExperimental Designs. In: Biotechnology for theEnvironment: Wastewater Treatment and Modeling, WasteGas Handling, pp. 101e186.
Petersen, B., Gernaey, K., Henze, M., Vanrolleghem, P.A., 2002.Evaluation of an ASM 1 model calibration procedure on amunicipal-industrial wastewater treatment plant. J.Hydroinfo. 4 (1), 15e38.
Rieger, L., Gillot, S., Langergraber, G., Ohtsuki, T., Shaw, A.,Takacs, I., Winkler, S., 2012. Guidelines for Using ActivatedSludge Models. IWA Scientific and Technical Report, TechnicalReport. IWA Publishing, London.
Sin, G., De Pauw, D.J.W., Weijers, S., Vanrolleghem, P.A., 2008. Anefficient approach to automate the manual trial and errorcalibration of activated sludge models. Biotechnol. Bioeng. 100(3), 516e528.
Sin, G., Van Hulle, S.W.H., De Pauw, D.J.W., Van Griensven, A.,et al., 2005. A critical comparison of systematic calibrationprotocols for activated sludge models: a SWOT analysis. WaterRes. 39 (12), 2459e2474.
Shaw, A., Takacs, I., Pagilla, K.R., Murthy, S., 2013. A newapproach to assess the dependency of extant half-saturationcoefficients on maximum process rates and estimate intrinsiccoefficients. Water Res. 47 (16), 5986e5994.
Takacs, I., Patry, G., Nolasco, D., 1991. A dynamic model of theClarification-Thickening process. Water Res. 25 (10),1263e1271.
Tchobanoglous, G., Burton, F.L., 1991. Wastewater EngineeringTreatment, Disposal and Reuse. McGraw-Hill, Inc.
Vanrolleghem, P.A., Insel, G., Petersen, B., Sin, G., et al., 2003. Acomprehensive model calibration procedure for activatedsludge models. Proc. Water Environ. Federation 2003 (9),210e237.
Vanrolleghem, P.A., Keesman, K.J., 1996. Identification ofbiodegradation models under model and data uncertainty.Water Sci. Technol. 33 (2), 91e105.

wat e r r e s e a r c h 5 0 ( 2 0 1 4 ) 2 5 4e2 6 6266
Walsh, S.,Whitney, P., 2012.AGraphical approach toDiagnosing theValidity of the Conditional Independence assumptions of aBayesiannetworkgivendata. J.Comput.Graph.Stat.21, 961e978.
Weijers, S.R., Vanrolleghem, P.A., 1997. A procedure for selectingbest identifiable parameters in calibrating activated sludgemodel no. 1 to full-scale plant data. Water Sci. Technol. 36 (5),69e79.
Yang, J., Reichert, P., Abbaspour, K.C., 2007. Bayesian uncertaintyanalysis in distributed hydrologic modeling: a case study inthe Thur River basin (Switzerland). Water Resour. Res. 43 (10),W10401.
Yuret, D., 1994. From Genetic Algorithms to EfficientOptimization. Technical Report No. 1569. MassachusettsInstitute of Technology.