primjena its-a u logistici.docx
DESCRIPTION
Primjena ITS-a u logistici.docxTRANSCRIPT

SADRŽAJ
UVOD ............................................................................................................................................. 3
1. PRIMJENA ITS-A U LOGISTICI .......................................................................................... 4
1.1. ITS rješenja u korištenju mreže cesta ..................................................................................... 4
2. LOKACIJSKE I NAVIGACIJSKE ITS USLUGE ................................................................... 8
2.1.Svrha sustava i korisnički zahtjevi ........................................................................................... 8
2.2. Zahtjevi korisnika i funkcijska specifikacija usluga rutnog vodiča i navigacije RGN ............ 9
2.3. Struktura sustava za lokaciju i navigaciju vozila .................................................................. 12
2.4. Primjena GPS i DGPS u ITS aplikacijama ........................................................................... 18
2.5. Tehnolgija za realiziranje sustava RGN ................................................................................. 22
2.6. Princip rada GPS-a ............................................................................................................... 23
2.7. GPS praćenje vozila .............................................................................................................. 24
2.8. Pasivno praćenje GPS vozila ................................................................................................ 25
2.9. Aktivno praćenje GPS vozila ................................................................................................. 25
3. INTELIGENTNI TRANSPORTNI TERMINALI I SUČELJA .............................................. 27
3.1 Pristup ITS reinženjiranju terminalnih sistema ..................................................................... 27
3.2. Prilagođavanje postojećih informacijskih sustava rješenjima ITS-a .................................... 30
3.3. ITS u funkciji povećanja efikasnosti City logistike ................................................................ 31
3.3.1. Zadaci City logistike ........................................................................................................... 31
3.3.2. City logistika i ITS u evropskim gradovima ....................................................................... 32
3.4. Telematski sistemi za prikupljanje podataka o radu vozila i vozača .................................... 32
3.4.1. Fleet Board sistem .............................................................................................................. 33
ZAKLJUČAK .............................................................................................................................. 36
LITERATURA ............................................................................................................................. 37

UVOD
Logistika kao poslovna funkcija obuhvaća sve djelatnosti potrebne za kompleksnu pripremu i
realizaciu prostorne i vremenske trensformacije dobara i znanja. Nastoji upotrebom ljudskih
resursa i sredstava u sustavima staviti na raspolaganje tržištu tražena dobra u pravo vrijeme i na
pravom mjestu, u traženoj količini, kvaliteti i cijeni s tačnim informacijama vezanim uz ta dobra.
Naglasak je na minimalnim troškovima i optimizaciji kako bi se postigla veća profitabilnost.
Preduzeća koja u svojem poslovanju primjenjuju logistički koncept uspijevaju savladati
ekonomske poteškoće uslovljene proizvodnom recesijom, da povećaju konkurentnu sposobnost i
ostvare novi zamah u svom razvoju.
Početkom 21 st. prometni stručnjaci se slažu da uspješno rješavanje rastućih problema odvijanja
prometa i obavljanja transporta više nije moguće bez primjene cjelovitog koncepta i tehnologija
ITS-a (Inteligentnih transportnih sustava). ITS je upravljačka i informatičko-komunikacijska
nadogradnja klasičnog sustava prometa i transporta, tako što se postiže znatno veća propusnost,
sigurnost, zaštićenost i ekološka prihvatljivost u odnosu na rješenja bez ITS aplikacija.
Porast prometovanja kao i promjena u načinu prometovanja naglašava potrebu napredovanja u
kontroli i funkcionisanju postojeće cestovne mreže. Inteligentni transportni sustavi se napajaju
naprednim tehnologijama obrade informacija, telekomunikacijama i elektronikom, dok se s druge
strane upotpunjuju. ITS rezultira sigurnijim i učinkovitijim transportnim sustavima za putnike i
terete, kako u gradskim centrima tako i u ruralnim područjima.
Budući da je ITS ključna odrednica razvoja prometa, transporta i logistike, za očektivati je
uključivanje značajnog dijela informatičke zajednice u te projekte. U razvoju ITS-a primjenjuju
se objektno orjentirane metode i pomagala, što je u skladu sa razvojem informatičke tehnologije.
U nastavku rada dat je osvrt na lokacijske i navigacijske ITS usluge, GPS i DGPS u ITS
aplikacijama, zatim na inteligentne transportne terminale i sučelja, napredak ITS aplikacija kod
usklađivanja veličine kapaciteta i prometnog opterećenja, funkciju inteligentnih transportnih
sustava u povećanju efikasnosti City logistike, te prilagodbu postojećih informacijskih sustava
rješenjima ITS-a,
2

1. PRIMJENA ITS-A U LOGISTICI
1.1. ITS rješenja u korištenju mreže cesta
Posljednjih nekoliko dekada obilježila je povećana primjena informatičke tehnologije i
komunikacija u svim sektorima gospodarstva. Sektor transporta također se okoristio ovim
napretkom, putem unaprijeđenih usluga što su pružene korisnicima cestovne mreže. Korištenje
cestovnih mreža danas je veće nego ikad. Porast prometovanja kao i promjena u načinu
prometovanja naglašava potrebu napredovanja u kontroli i funkcioniranju postojećih cestovnih
mreža. Inteligentni transportni sustavi (ITS) napajaju se naprednim tehnologijama obrade
informacija, telekomunikacijama i elektronikom, dok ih s druge strane upotpunjuju. ITS rezultira
sigurnijim i učinkovitijim transportnim sustavima za putnike i terete, kako u gradskim centrima
tako i u ruralnim područjima. ITS omogućuje korisne informacije u realnom vremenu
automobilistima i komercijalnim prevoznicima, kao i operaterima cestovne mreže. ITS primjene
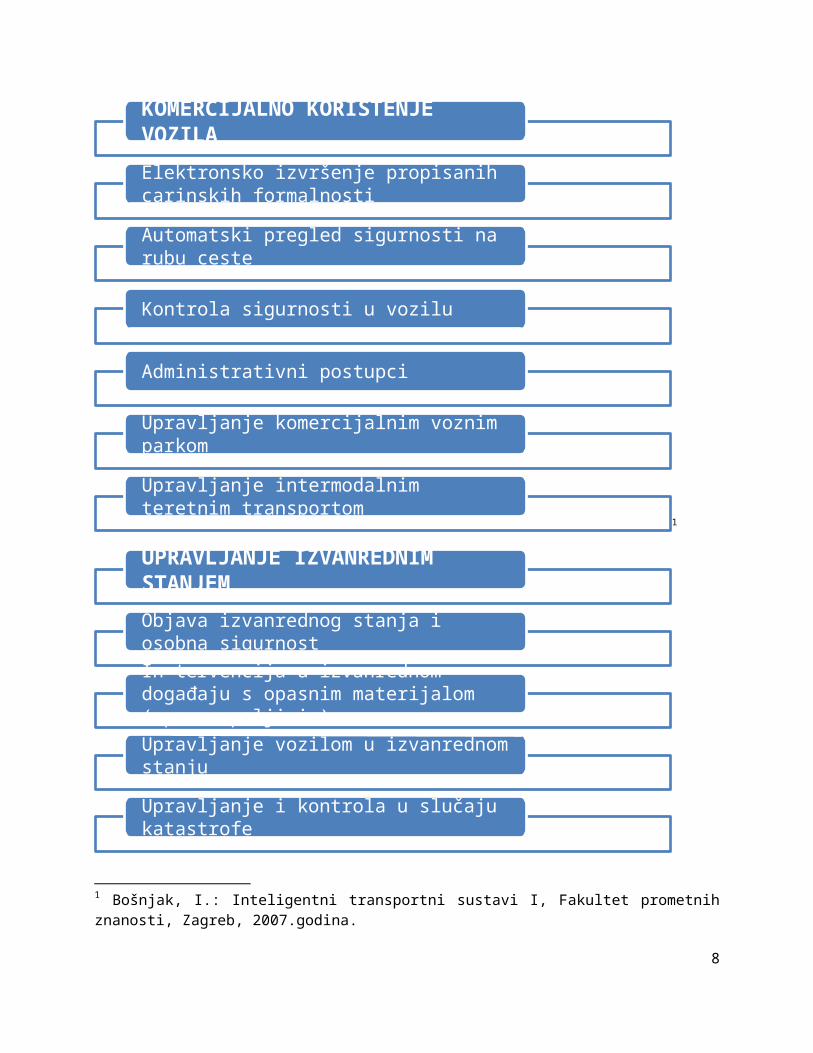
moguće je grupirati u skupine usluga, od kojih je jedna takva prikazana u tablici 1. iako ITS
opskrbljuje važne tehnologije kao potporu kontroli prometovanja, ITS i kontrola nisu identični
pojmovi. Postoje operaciona pitanja i problemi koji su malo ili nimalo u vezi s ITS
tehnologijama. I obrnuto, neke ITS sastavnice srodnije suviše planiranju nego kontroli cestovnog
prometa.
3

4
INFORMACIJE ZA KORISNIKA
Informacije za putnike
Usmjeravanje na željenu cestu
Prilagodba vožnje i rezervacije
Putničke usluge i rezervacije
KONTROLA PROMETA
Kontrola prometa
Upravljanje slučajnim događajima
Upravljanje prometnom potražnjom
Monitoring stanja okoliša
Upravljanje i održavanje
Dinamičko povećanje i automatizirana primjena zakona
Sigurnost korisnika na cesti bez vozila
Sigurnost i kontrola multimodalnog raskržja
1
1 Bošnjak, I.: Inteligentni transportni sustavi I, Fakultet prometnih znanosti, Zagreb, 2007.godina.
5
JAVNI TRANSPORT
Kontrola javnog transporta
Informiranje na tranzitnim cestama
Transport prilagođen potražnji
Sigurnost javnog transporta
ELEKTRONSKO PLAĆANJE
Služba za elektronsko plaćanje
KOMERCIJALNO KORIŠTENJE VOZILA
Elektronsko izvršenje propisanih carinskih formalnosti
Automatski pregled sigurnosti na rubu ceste
Kontrola sigurnosti u vozilu
Administrativni postupci
Upravljanje komercijalnim voznim parkom
Upravljanje intermodalnim teretnim transportom

6
UPRAVLJANJE IZVANREDNIM STANJEM
Objava izvanrednog stanja i osobna sigurnost
In tervencija u izvanrednom događaju s opasnim materijalom (npr. zapaljivim)
Upravljanje vozilom u izvanrednom stanju
Upravljanje i kontrola u slučaju katastrofe
NAPREDNI SUSTAVI KONTROLE I SIGURNOSTI
Izbjegavanje sudara (na vozilima)
Izbjegavanje sudara (na infrastrukturi)
Povećanje sigurnosti vožnje zasnovano na senzorima
Kontrola sigurnosti
Raspoređivanje "sredstava za obuzdavanje" prije sudara
Automatizirano vođenje vozila

Tabela 1. Identificiranje ITS primjena za usluge unutar cestovne mreže
2. LOKACIJSKE I NAVIGACIJSKE ITS USLUGE
2.1.Svrha sustava i korisnički zahtjevi
ITS usluga rutnih vodiča i navigacija (Route Guidance and Navigation-RGN) pripada skupini
putnih informacija (TI ITS). Usluge RGN može se realizirati putem relativno samostalnog sustava
kao dijela integriranog sustava putnih informacija (TI ITS) ili u okviru sustava lokacije i
navigacije.
Navigacijski sistemi vozila mogu se temeljiti na:
- zemaljskim sustavima (korištenjem GSM, UMTS i drugih sustava),
- satelitskim navigacijskim sustavima (GPS, GLONASS, EutelTracks, idr.) koji omogućuju
pokrivenost na onim područjima koja zemaljski sustavi ne pokrivaju.
Praćenje i usmjeravanje (rutiranje) vozila i putnika preko mobilnih ćelijskih telekomunikacijskih
sustava postaje sve aktuelnije zbog dinamičkog razvoja i dostupnosti tih sustava. U zatvorenim
prostorima (podzemne garaže i sl.) odnosno gradskim ulicama gdje je otežan prijem
elektromagnetskog signala koriste se dodatna tehnička rješenja-inercijski sustavi, itd.
7
SLUŽBA ZA USKLADIŠTENJE PODATAKA
Upravljanje podacima o vremenu i okolišu
Upravljanje arhivom podataka
Za razliku od klasičnog putnog usmjeravanja pomoću autokarte na papiru, sustav RGN
izračunava optimalnu rutu i daje upute vozaču (vizualnim dijagramima i sintetizovanim glasom)
kako doći do specificiranog odredišta. Uz korištenje statičkih informacija s CD-ROM digitalne
mape moguće je kombiniranje stvarnovremenskih informacija kako bi se izbjegle rute na kojima
postoji zagušenje prometa.
2.2. Zahtjevi korisnika i funkcijska specifikacija usluga rutnog vodiča i navigacije RGN
Slično drugim ITS uslugama, zahtjeve korisnika RGN usluga neophodno je istražiti i specificirati
tako da se mogu izvesti odgovarajuće funkcijske specifikacije sustava RGN kao samostalnog
sustava ili dijela šireg integriranog sustava. Ključne koristi od sustava RGN imat će individualni
korisnici i davatelji usluga, dok će neposredni dobici za druge stakeholdere biti znatno manji.
Prema rezultatima provedenih istraživanja u projektu KAREN i preliminarnim istraživanjima u
zemljama srednje i istočne Evrope (CEE) u tablici je prikazan dio usuglašenih zahtjeva za
uslugama RGN.
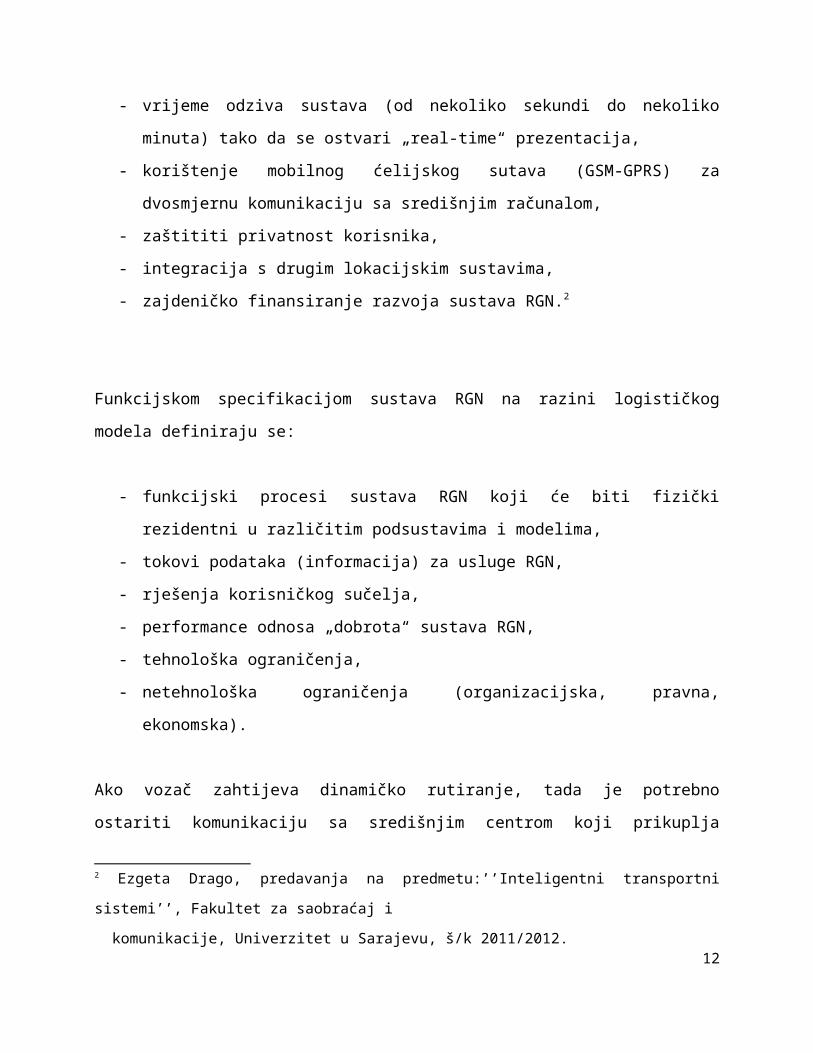
Posebni zahtjevi korisnika i interes davatelja usluga vezani su uz:
- pozicijsku preciznost, npr. pri identifikaciji korektne linije-1 metar,
- vrijeme odziva sustava (od nekoliko sekundi do nekoliko minuta) tako da se ostvari „real-
time“ prezentacija,
- korištenje mobilnog ćelijskog sutava (GSM-GPRS) za dvosmjernu komunikaciju sa
središnjim računalom,
- zaštititi privatnost korisnika,
- integracija s drugim lokacijskim sustavima,
- zajdeničko finansiranje razvoja sustava RGN.2
2 Ezgeta Drago, predavanja na predmetu:’’Inteligentni transportni sistemi’’, Fakultet za saobraćaj i
komunikacije, Univerzitet u Sarajevu, š/k 2011/2012.8

Funkcijskom specifikacijom sustava RGN na razini logističkog modela definiraju se:
- funkcijski procesi sustava RGN koji će biti fizički rezidentni u različitim podsustavima i
modelima,
- tokovi podataka (informacija) za usluge RGN,
- rješenja korisničkog sučelja,
- performance odnosa „dobrota“ sustava RGN,
- tehnološka ograničenja,
- netehnološka ograničenja (organizacijska, pravna, ekonomska).
Ako vozač zahtijeva dinamičko rutiranje, tada je potrebno ostariti komunikaciju sa središnjim
centrom koji prikuplja stvarnovremenske podatke i temeljem toga kalkulira najbolju rutu do
željenog odredišta. To funkcionalno znači da proces a) šalje zahtjeve procesu b) gdje se dalje
aktiviraju procesi vezani za lokaciju i proračun rutiranja. Ako se ne može realizirati dinamičko
rutiranje, tada proces a) šalje zahtjev prema procesu c) kojim se realizira autonomno navošenje
vozila.3
3 Ezgeta Drago, predavanja na predmetu:’’Inteligentni transportni sistemi’’, Fakultet za saobraćaj i
komunikacije, Univerzitet u Sarajevu, š/k 2011/2012.9

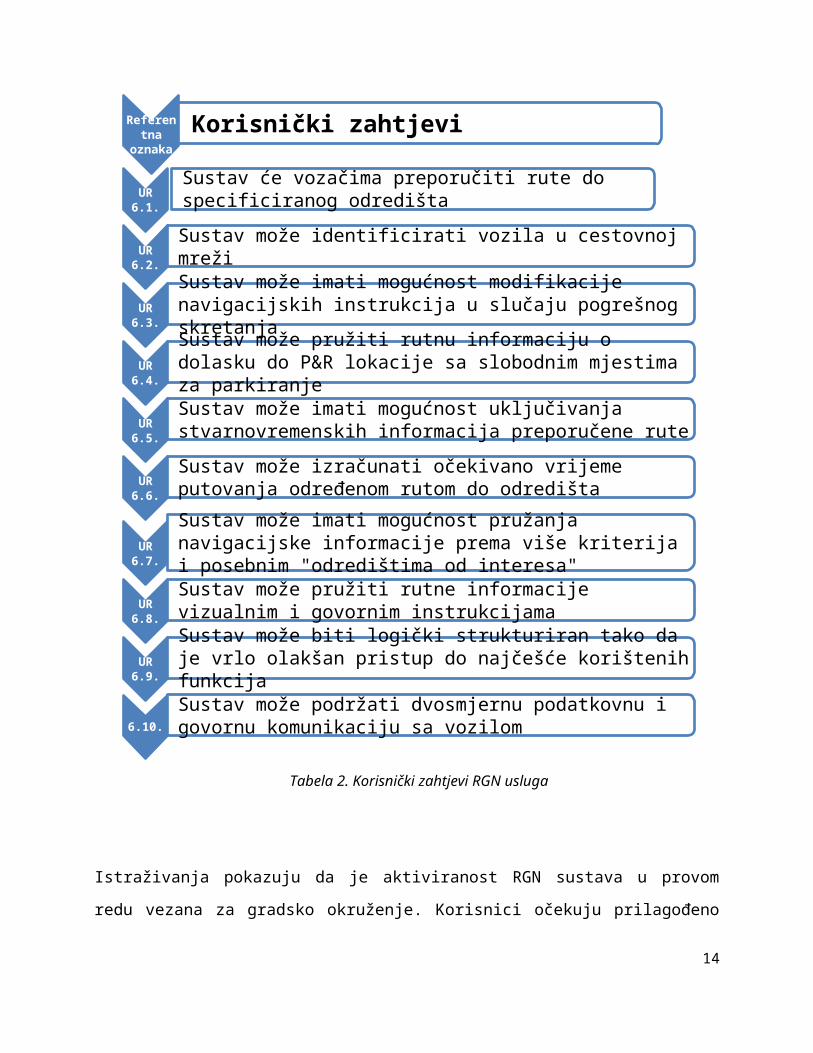
Tabela 2. Korisnički zahtjevi RGN usluga
Istraživanja pokazuju da je aktiviranost RGN sustava u provom redu vezana za gradsko
okruženje. Korisnici očekuju prilagođeno sučelje (Human Machine Intefaces) tako da unos
željene destinacije bude jednostavno izveden selekcijom iz integriranog indeksa naziva ulica ili
lokacija. 10
Referentn
a oznaka
Korisnički zahtjevi
UR 6.1
.
Sustav će vozačima preporučiti rute do specificiranog odredišta
UR 6.2
.
Sustav može identificirati vozila u cestovnoj mreži
UR 6.3
.
Sustav može imati mogućnost modifikacije navigacijskih instrukcija u slučaju pogrešnog skretanja
UR 6.4
.
Sustav može pružiti rutnu informaciju o dolasku do P&R lokacije sa slobodnim mjestima za parkiranje
UR 6.5
.
Sustav može imati mogućnost uključivanja stvarnovremenskih informacija preporučene rute
UR 6.6
.
Sustav može izračunati očekivano vrijeme putovanja određenom rutom do odredišta
UR 6.7
.
Sustav može imati mogućnost pružanja navigacijske informacije prema više kriterija i posebnim "odredištima od interesa"
UR 6.8
.
Sustav može pružiti rutne informacije vizualnim i govornim instrukcijama
UR 6.9
.
Sustav može biti logički strukturiran tako da je vrlo olakšan pristup do najčešće korištenih funkcija
6.10.
Sustav može podržati dvosmjernu podatkovnu i govornu komunikaciju sa vozilom

PLANIRANJE UPRAVLJANJE RUTOM
BEŽIČNA KOMUNIKACIJA
POZICIONIRANJE
SUČELJE ČOVJEK-STORJ
BAZA DIGITALIZIRANJE KARTE
Marketinško-tehnološki usuglašeni zahtjevi korisnika za uslugama RGN preslikavaju se u
podržavajuće funkcije procesa tako da vrijedi
URRNG FPRGN
gdje je simbol za meko neizrazito preslikavanje. Korisnik ne može potpuno precizno
iskazati zahtjeve niti poznavati sve mogućnosti novih tehničkih rješenja tako da je važno
omogućiti asocijaciju i obogaćivanje rješenja u iterativnim „šta? kako?“ ciklusima.
2.3. Struktura sustava za lokaciju i navigaciju vozila
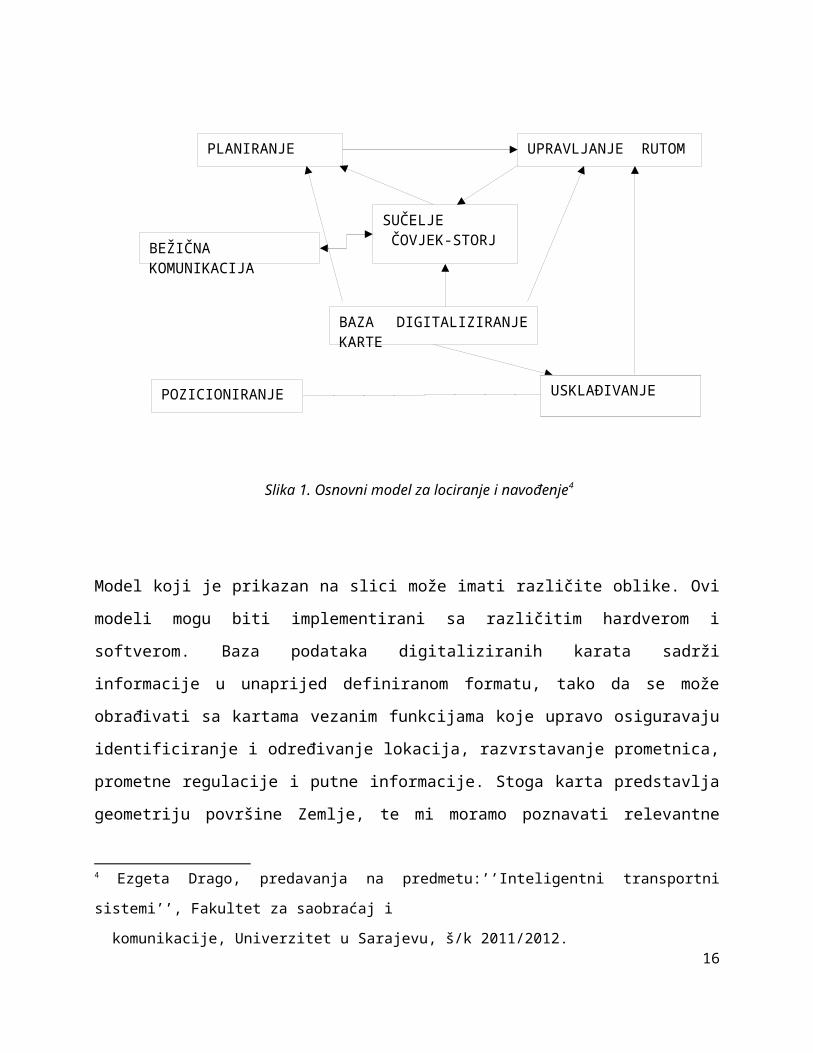
Modeli lokacijski i navigacijski sustava sastoje se od nekih ili svih modula koji su prikazani na
slici 1.
Slika 1. Osnovni model za lociranje i navođenje4
4 Ezgeta Drago, predavanja na predmetu:’’Inteligentni transportni sistemi’’, Fakultet za saobraćaj i
komunikacije, Univerzitet u Sarajevu, š/k 2011/2012.11
USKLAĐIVANJE KARTE
Model koji je prikazan na slici može imati različite oblike. Ovi modeli mogu biti implementirani
sa različitim hardverom i softverom. Baza podataka digitaliziranih karata sadrži informacije u
unaprijed definiranom formatu, tako da se može obrađivati sa kartama vezanim funkcijama koje
upravo osiguravaju identificiranje i određivanje lokacija, razvrstavanje prometnica, prometne
regulacije i putne informacije. Stoga karta predstavlja geometriju površine Zemlje, te mi moramo
poznavati relevantne koordinatne sustave korištene u različitim bazama karata radi pravilnog
korištenja funkcionalnih veza različitih karata.
Modul za planiranje rute omogućava proces planiranja rute prije i tijekom vožnje. To je jedno od
temeljnih izlaznih rješenja područja navigacije vozila. Planiranje ruta se može dalje klasificirati u
dvije grupe i to:
- planiranje skupno za više vozila, gdje se planira rute između više destinacija za sva vozila
na prometnom segmentu mreže,
- pojedinačna ruta za svako vozilo posebno, gdje je plan za pojedinačnu rutu preciziran za
pojedinačno vozilo na prometnoj lokaciji.
Cilj je pronaći najkraći put od izvora A do cilja B putovanja za postojeće prometne uvjete na
mreži za što je razvijen veći broj algoritama i postupaka. Planiranje putovanja je proces koji
pomaže vozačima planiranje rute tokom putovanja, koja se temelji na osiguravanju karte za bazu
podataka karata, ako je dostupna, u realnom vremenu primanja informacija o prometu preko
bežične komunikacijske mreže. Promjenljive koje služe kao kriterij za optimiziranje u planiranju
ruta od kojih zavisi kvaliteta usluge su rastojanje, vrijeme putovanja, brzina, broj skretanja,
prometna svjetla i promjenljive prometne informacije.
Modul pozicioniranja objedinjuje različite podatke dobivene od senzora ili koristi radio signale
za automatsko rješavanje pozicije vozila ili putem mobilnog uređaja za identifikaciju puta kojim
se putuje osigurava pristup svakoj dionici puta. Modul za pozicioniranje je ključna komponenta
svakog sustava za lokaciju i navigaciju vozila.
12

Pomoći vozaču, bilo da se radi o određivanju lokacije vozila ili pomaganju pri manevriranju
vozilom moraju biti izvedene veoma precizno. Radi toga, precizno i pouzdano pozicioniranje
vozila je preduvjet za bilo koji dobar sustav lokacije i navigacije vozila. Pozicioniranje uključuje
određivanje koordinata vozila na površini zemlje.
Ne može se samo jednim senzorom odrediti pozicija vozila i informacija o lokaciji sa potrebnom
tačnošću za sustav lokacije i navigacije vozila. Općenito rješenje je objedinjavanje informacija od
različitog broja senzora. Prema tome modul za pozicioniranje tipično integrira različite senzore,
čije komponente međusobno djeluju zadovoljavajući zahtjeve sustava.
Opći senzor pozicije i pravca je veoma važan za rješavanje problema lokacije i navigacije. Opći
senzor može osigurati informaciju o poziciji vozila uzimajući u obzir površinu Zemlje. Najviše
korištena tehnologija za određivanje opće pozicije vozila je magnetni kompas i GPS (Global
Positioning System). GPS se sastoji od 24 satelita u šest orbita sa po četiri satelita u orbiti.
Relativni senzor ne može odrediti opći smjer ili poziciju respektirajući referentni koordinatni
sustav.
Slika 2. Globalni pozicijski sustav
13
GPS (Global Positioning System) satelitski bazirani radio navigacioni sustav. Sastoji se od tri
dijela:
- sateliti (prostorni segment),
- korisnički segment (prijemnik),
- kontrolni segment (regulacija i upravljanje).
Tehnologija određivanja lokacije odnosno pozicije cestovnog vozila preko satelita u osnovi je ista
kao pri određivanju pozicije broda ili zrakoplova. Satelitski prijemnik u vozilu treba imati
optičku vidljivost s barem četiri satelita tako da se može iz vremena prolaza signala izračunati
pozicija vozila.
Osim američkog „globalnog pozicijskog sustava“ GPS, koristi se i ruski sustav GLONASS, a u
primjeni je i evropski satelitski sustav Galileo. Naziv „globalni navigacijski satelitski sustav“
GNSS (Global Navigation Satelite System) pokriva ta tri sustava te nove slične sustave koji će
biti lansirani. Preciznost određivanja pozicije kod diferencijanih sustava je u okviru 1,5 metara.
Ako je vozilo u podzemnoj garaži, tunelu ili zaklonjeno zgradama, tada se koriste drugi
komplementarni načini:
- žiroskop ili inercijalni sustavi,
- preslikavanje ili izračuni iz digitalnih karata,
- pomoću terminala mobilne ćelijske mreže.
Modul baza podataka digitaliziranih karata omogućava realiziranje mnogih funkcija sustava za
lociranje i navođenje vozila. Da bi to mogao ostvariti sustav treba osigurati:
1. Prikaz karte u čitljivom i razumnom obliku,
2. Lokaciju adrese ili odredište koristeći adresu ulice ili blisku dionicu,
3. Izračunavanje rute putovanja,
4. Vođenje vozača duž izračunate rute,
5. Usklađivanje putanje vozila utvrđenu na temelju senzora na vozilu sa poznatom
mrežom prometnica, te vršeći stalno usklađivanje iste,
14

6. Osigurava putne informacije za upravljanje putovanjem, informacije o stanju u
prometu, hotelima, restoranima.
Uspješno rješavanje kompleksnog problema lokacije i navigacije vozila traži od sustava da prvo
ignorira nisku razinu detalja i da se koncentrira na glavna svojstva problema ulazeći u detalje
kasnije. Ova ideja od jednostavnijeg koraka do generaliziranja problema je višerazinski zahtjev
koji je fokusiran na različite razine detalja. Ova tehnika je veoma uspješna u smanjenju
kompleksnosti problema.
Ovakav pristup rješavanju problema osigurava hijerarhijski organizirana baza karata koja je
organizirana u četiri razine od razine 0 do razine 3:
- razina 0 uključuje sve putove na mreži i povezane informacije neophodne za
navigaciju,
- razina 1 uključuje sabirne prometnice, arterije i autoceste,
- razina 2 uključuje arterije i autoceste,
- razina 3 uključuje samo autoceste.
Modul za usklađivanje karte ima veoma važnu ulogu u sustavu lokacije i navigacije vozila.
Korištenje digitalnih karata za sustav pozicioniranja mora osigurati pouzdanost i preciznost.
Osiguranje podrške vozaču pri manevriranju ili korigiranju pozicije vozila na karti radi
korigiranja grešaka u sustavu lokacije i navigacije vozila zahtijeva precizno poznavanje pozicije
vozila.
Usklađivanje karte je postupak usklađivanja pozicije (ili putanje) izmjerene ili dobivene od
modula za pozicioniranje te povezivanje tako dobivene pozicije sa lokacijom na karti koja se
nalazi u bazi podataka karata.
Ova tehnika može povećati tačnost za modul pozicioniranja pod uvjetom da je baza podataka
karata razumljiva i precizna. Tipični zahtjev za preciznošću na ulicama u urbanim područjima je
15 metara. 5
5 Ezgeta Drago, predavanja na predmetu:’’Inteligentni transportni sistemi’’, Fakultet za saobraćaj i
komunikacije, Univerzitet u Sarajevu, š/k 2011/2012.15
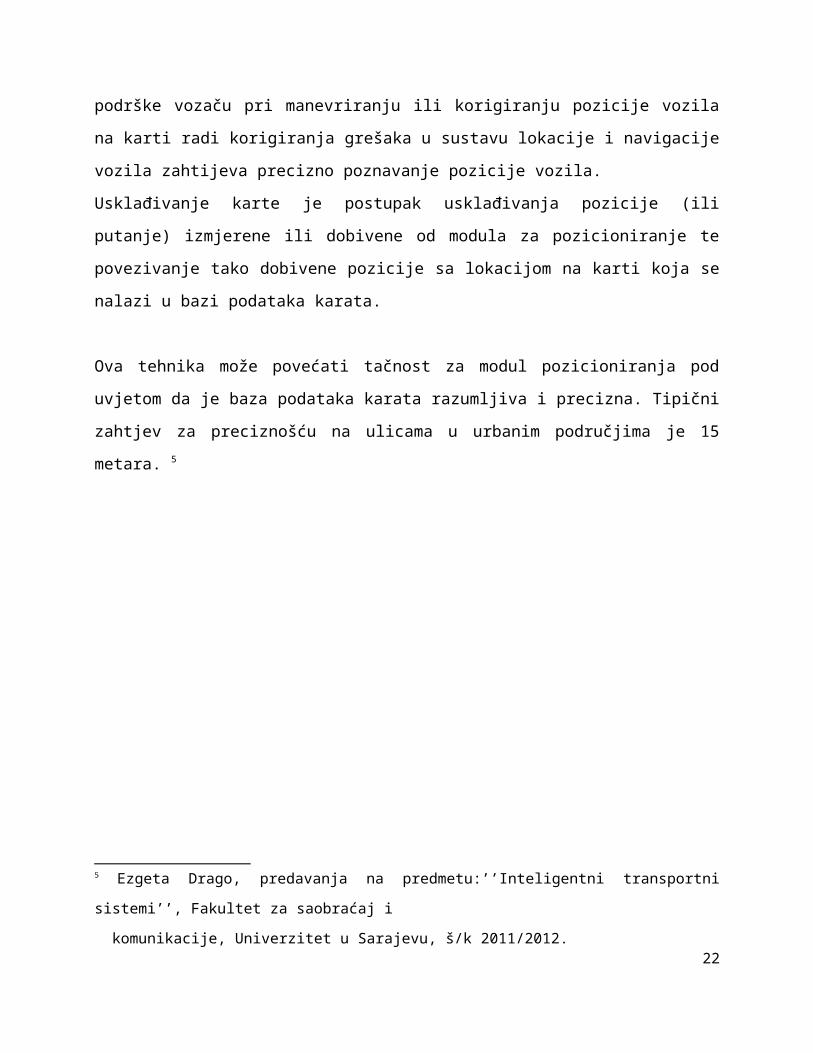
Slika 3. Sustav usklađivanja karata sa pozicijom vozila
Veličina nesigurnosti u sustavu usklađivanja karte može se proširiti na nemogućnost izračuna
pozicije (ili putovanja) sa pozicijom koja je očitana na karti. Kada se ne može odrediti sigurna
pozicija vozila na karti (zaseban segment puta) može se odrediti opća pozicija vozila, te se
ponovno izvršiti usuglašavanje sa pozicijom na karti. Ovo će eliminirati kumulirane greške do
sljedećeg koraka usuglašavanja karte. Ovakvo provođenje procesa za svaki uzastopni krug
osigurava veću preciznost određivanja pozicije za sustav.
Modul za upravljanje vozilom na ruti realizira proces vođenja vozača duž rute. Upravljanje rutom
je proces vođenja vozača duž rute generiran od strane modula za planiranje ruta. On koristi izlaze
od modula za planiranje ruta, i sustava za pozicioniranje, kojeg koriste vozila na ruti. Dodavanje
na modul baze podataka o kartama, sustav za pozicioniranje može biti usuglašen sa modulom za
pozicioniranje i modulom za usuglašavanje karata.
16
Upravljanje rutom je proces upravljanja vozača duž rute koji generira modul planiranja
putovanja. On zahtijeva pomoć od preciznog pozicioniranja i baze podataka karata koja može
prepoznati trenutnu poziciju vozila te generirati upravljačke upute u realnom vremenu koje se
često mijenjaju.
Vođenje može biti prije putovanja ili u realnom vremenu tijekom putovanja. Pred putno vođenje
može biti vozaču prezentirano u obliku printanog izvještaja. Pisana izvješća mogu biti istovjetna
za putničke agencije, insturkcije za promjenu smjera. Ove upute uključuju promjenu smjera,
naziva ulica, dionice putovanja. Traženje baze karata, preciznog modula za pozicioniranje,
zahtjeva izračunavanja u realnom vremenu osiguravajući tražene koristi.
2.4. Primjena GPS i DGPS u ITS aplikacijama
Ovisno osnovnoj inačici usluge RGN (autonomni, centralno-dinamički ili dualni način rada)
primjenjuju se različite tehnologije rada odnosno tehnička rješenja prilagođena čovjeku. Neka od
tehničkih rješenja dostupna su kao gotovi proizvodi na tržištu, odnosno ugrađuju se kao dodatna
oprema u vozila. Sučelje čovjek-stroj (HMI-Human Machine Interface) vrlo su značajna za
učinkovitost i sigurnost usluge rutiranja i navigacije.
Autonomni rutni vodič (Autonomous Route Guidance) izračunava optimalne rute na „on-board“
računalnoj opremi u vozilu uz korištenje „on-board“ digitalne mape. Vozač upisuje cilj
putovanja, a navigacijsko računalo određuje najbolji put na temelju postojeće lokacije vozila
(koju daje GPS ili DGPS prijemnik) i digitalne mape. Ako na raskrižju vozač pogrešno skrene,
navigacijska oprema prepoznaje i daje novi plan puta.
U centraliziranom dinamičkom rutnom vodiču (Centraliesed Dynamic Route Guidance) obrada
zahtjeva obavlja se u središnjem računalu prometnog informacionog centra koje raspolaže
dinamičkim podacima o stranju prometa. Nakon zahtjeva iz vozila u središnjem računalu
izračunava se optimalna ruta i skup uputa šalje se natrag vozilu na svakom raskrižju. Vozilo je
opremljeno duplerskim komunikacijskim sustavom te koristi infracrvene usmjerivače (infrared
beacons) raspoređene na gradskim raskrižjima. Digitalna mapa u opremi vozila nije neophodna.
17

Dualni mod rutnog vodiča (Dual Mode Route Guidance) je kombinacija autonomnog i
centraliziranog rutnog vodiča. Ako autonomni navigacijski sustav dopunjen RDS/TMC
prijemnikom tako da se prometne poruke dekodiraju i lociraju na digitalnoj mapi, tada je to tzv.
dualni mod rutnog vodiča. Takav sustav omogućuje uvažavanje stvarne prometne situacije na
ulicama i izbjegavanje ulica i zona s prometnim zagušenjem.
Autonomni navigacijski sustav ugrađen u vozilo čine:
- navigacijsko (on-board) računalo,
- GPS (DGPS ili drugi) prijemnik,
- senzori na kotačima vozila,
- magnetski kompas,
- CD ili DVD player,
- cestovna digitalna mapa (pohranjena na CD_ROM ili DVD-u).
Navigacijsko računalo spojeno sa GPS prijemnikom omogućuje tek vrlo grubo prostorno
pozicioniranje (+/- 100 m). Za preciznije pozicioniranje i lociranje vozila na digitalnoj mapi
(uključivo s prikazom ulica) potrebna je dodatna oprema. Tehnikom pozicioniranja određuju se
koordinate vozila u odnosu na neku referentnu tačku. Ako je poznata početna lokacija i sva
premještanja vozila u 2D prostoru, moguće je integrirati pređenu udaljenost i smjer putovanja u
odnosu na poznatu lokaciju. Radi postizanja veće tačnosti primjenjuju se višesenzorski sustavi s
relativnim senzorima (senzori na kotačima, žiroskopi i dr.).
Modul digitalne mape podržava funkcije prikaza vektorski kodirane cestovne mreže, lociranje
odredišta, pređene kilometre, vođenje određenom rutom i davanje putnih informacija.
Određivanje optimalne rute od željenog odredišta (prema kriterijima najkraće udaljenosti,
najkraćeg vremena itd.) obavlja se na on-board računalu temeljem podataka iz digitalne mape.6
6 Bošnjak, I.: Inteligentni transportni sustavi I, Fakultet prometnih znanosti, Zagreb, 2007.godina.
18

Visoka razina funkcionalnih zahtjeva koju mora ispuniti sustav autonomne lokacije inavigacije
su:
1. Sustav treba imati sposobnost prepoznavanja trenutne pozicije 20 m od stvarne
lokacije za 90% vremena putovanja,
2. Sustav treba imati sposobnost prevesti trenutnu lokaciju u koordinate na karti kao i na
početak nadolazeće dionice puta,
3. Sustav mora biti sposoban predstaviti poziciju vozila na karti, te osigurati vidljivost od
operatora vozila,
4. Sustav mora osigurati primanje zahtjeva odredišta putovanja i osigurati plan za
najbolju rutu do odredišta,
5. Sustav mora osigurati slanje audio i vizualnih uputa za direktno manevriranje koje
zahtijeva planiranje rute,
6. Sustav mora osigurati prepoznavanje kada se nalazi van rute kada je van planirane
dionice puta,
7. Sustav mora osigurati ispravno funkcioniranje i kada se nalazi van planirane rute, te
osigurati generiranje nove rute.
Centralizirani sustav lokacije i navigacije putem glavnog računala (Host) koje se sastoji od
jednog ili više uređaja, vrši određivanje lokacije i osigurava informacije za upravljanje ili
savjetovanje jednog ili više vozila ili uređaja. Kod jednostavnijih sustava, jednostavni
(jednosmjerna komunikacija) zahtjevi za utvrđivanje lokacije uključuju funkciju lokacije, modul
sučelja čovjek-stroj i modul bežične veze. U mnogo kompleksnijim sustavima, host može
osigurati potpuno dvostruku podršku navigaciji (dvosmjerna komunikacija između hosta i
pokretnog uređaja), potpunu integraciju prometnih podataka koja osigurava dinamičko
upravljanje na ruti koja se temelji na stvarnovremenskim informacijama. Mobilna jedinica može
imati funkcije lokacije i navigacije različite razine.
19
Centralizirani sustav lokacije i navigacije koriste:
- službe E 911 poziv za pomoć,
- služba pomoći na cestama,
- žurne službe (policija, protupožarna služba, hitna pomoć),
- javni transport (praćenje kretanja autobusa),
- privatni servisi (taxi, špedicija,),
- putne informacije (upravljanje vozilima na ruti, turističke informacije, servisne
informacije).
Tri su glavna ograničenja razvoja ovog sustava:
- sposobnost lociranja i navigacije,
- tačnost lokacije i učestalost ažuriranja lokacije,
- izbor tehnologije bežičnih komunikacija.
Sustav za automatska traženja lokacije vozila (Automatic Vehicle Location AVL), vrši brzo
pozicioniranje vozila na dionici puta i šalje informaciju hostu putem komunikacijske
infrastrukture. Host može imati različite oblike kao što su dispečerski centri, centri za putno
informiranje, centri za upravljanje prometom.
Klasični pristup za centralizirani sustav lokacije i navigacije je koncipiran tako da se sve
informacije prikupljaju obrađuju i distribuiraju putem glavnog računala Host, dok su na vozilima
samo sučelja stroj-čovjek koja osiguravaju prijem i otpremu informacija (ovisno da li je
jednosmjerni ili dvosmjerni sustav komunikacije).
Postoje sustavi gdje se u vozilu nalazi pored sučelja stroj-čovjek sa bazom podataka karata i
sustav za usuglašavanje karata tako da da se određene operacije obavljaju u host računalu a drugi
dio operacija se obavlja u samom vozilu.
Centralizirani dinamički rutni vodič dodatno zahtijeva duplersku komunikaciju sa središnjim
računalom u prometno informacijskom centru.
20
Takva komunikacija se realizira:
- korištenjem GSM/GPRS veze,
- bežične (infracrvene) komunikacije s usmjerivačima (becons) smještenim na raskrižjima.
Vozač će komunicirati s pozitivnim središtem te postaviti zahtjev koji će biti određena u
središnjem računalu. Instrukcije vozaču mogu biti verbalne ili u drugom obliku pri korištenju
nove generacije mobilnih sustava UMTS.
Relevantne već definirane norme i tehničke preporuke za sustav RNG su:
- ISO ENV 14285 (Geographic Data Files),
- CEN TE 278 WG7 WI 7.3.1. (Geographic Road Data-Location Catalogues),
- ISO EN 15005 1-2 (Road Vehicle Man Machine Interface-dialogue management),
- ISO EN 15006 1-2 (Road Vehicle Man Machine Interface-auditory information),
- ISO EN 15007 1-2 (Road Vehicle Man Machine Interface-visual presentation of
information).
2.5. Tehnolgija za realiziranje sustava RGN
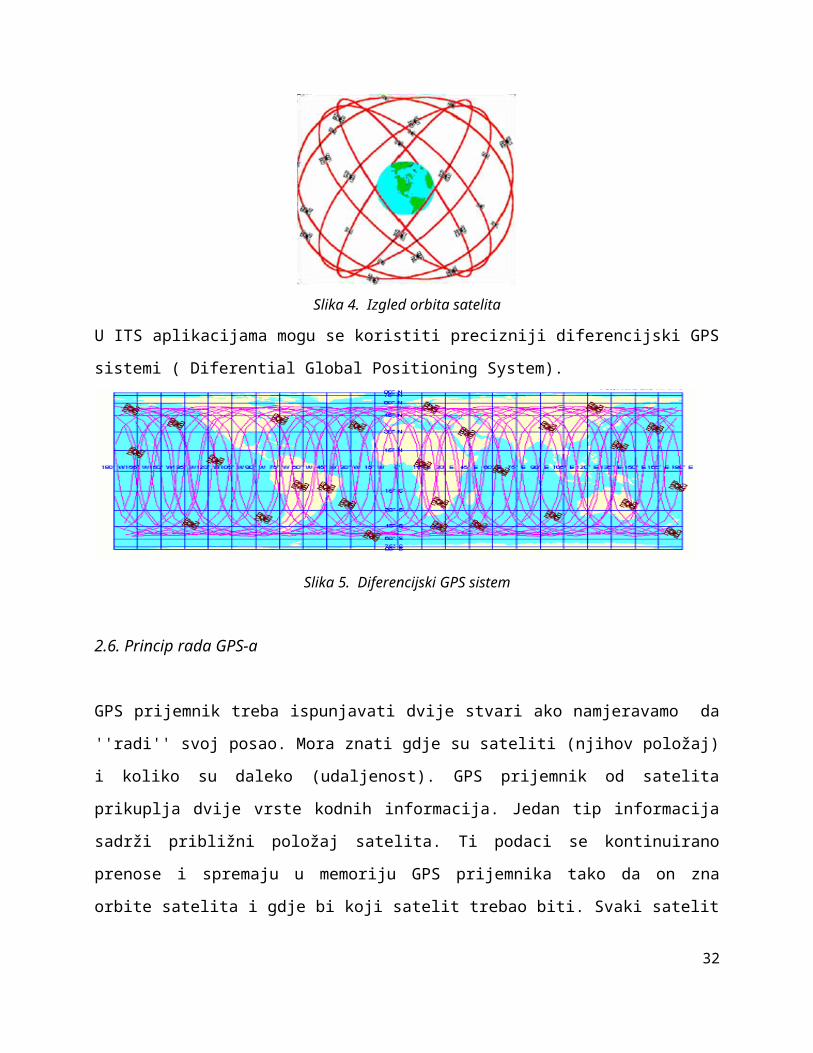
Globalni pozicijski sistem GPS (Global Position System) satelitski je radio-navigacijski sistem
koji se koristi u različitim ITS aplikacijama vezano za određivanje položaja na površini i u
prostoru oko površine. To uključuje: određivanje pozicije i najbliže tačke ili vozila (taksi,
interventna vozila, dostavna vozila), povezivanje GPS antene s navigacijskim sistemom i
vođenjem do odredišta (GPS guidance), sigurnosne aplikacije i zašitu vozila i vozača itd. GPS
ima ukupno 24 satelita s visinom putanje od 20.183 km uz vrijeme obilaska Zemlje od 11 sati i 58
minuta. U svakom trenutku korisniku je na raspolaganju 6 do 11 satelita tako da prijemnik za
pozicioniranje odabere 4 najpovoljnija.7
7 Sokolija Kemo, predavanja na predmetu:''Nadzor i regulisanje cestovnog saobraćaja'', Fakultet za
saobraćaj i komunikacije, Univerzitet u Sarajevu, Š/k 2011/2012.21
Slika 4. Izgled orbita satelita
U ITS aplikacijama mogu se koristiti precizniji diferencijski GPS sistemi ( Diferential Global
Positioning System).
Slika 5. Diferencijski GPS sistem
2.6. Princip rada GPS-a
GPS prijemnik treba ispunjavati dvije stvari ako namjeravamo da ''radi'' svoj posao. Mora znati
gdje su sateliti (njihov položaj) i koliko su daleko (udaljenost). GPS prijemnik od satelita
prikuplja dvije vrste kodnih informacija. Jedan tip informacija sadrži približni položaj satelita. Ti
podaci se kontinuirano prenose i spremaju u memoriju GPS prijemnika tako da on zna orbite
satelita i gdje bi koji satelit trebao biti. Svaki satelit može putovati malo izvan orbite, pa
zemaljska stanica za praćenje prati orbite satelita, njihovu visinu, položaj i brzinu. Zemaljska
stanica za praćenje šalje orbitalne informacije glavnoj kontrolnoj stanici, koja šalje satelitima
ispravljene podatke. Podaci o položaju satelita u bilo kojem trenutku nazivaju se podacima
almanaha. Kada je GPS prijemnik hladan, trebat će mu malo duže vremena da pronađe satelite.
Prijemnik se smatra toplim kada su podaci sakupljani u posljednjih 4 do 6 sati.
22
Pri izboru koji GPS prijemnik kupiti, dobro je pogledati specifikaciju ''hladnog'' i ''toplog''
traženja satelita.
Slika 6. Pozicioniranje satelita
Moguća su dva položaja u kojima se sijeku ove tri sfere i oni se znatno razlikuju po
koordinatama. Za odluku o tome koja od dvije zajedničke tačke daje stvarni položaj, trebat će se
unijeti približna visina u GPS prijemniku. To će omogućiti prijemniku da izračuna
dvodimenzionalni položaj (geografsku dužinu i širinu). Dalje, uz pomoć četvrtog satelita,
prijemnik može odrediti i trodimenzionalni položaj (geografsku dužinu, širinu i visinu).
2.7. GPS praćenje vozila
Ova opcija je naročito korisna kada je GPS uređaj smješten u vozilo. Praktični dokaz korisnosti
ovog sistema je situacija ako je vozilo ukradeno. Kada je to javljeno policiji, ona lahko može ući
u trag ukradenom vozilu te tako krenuti u fizičku potragu za vozilom. Jos jedan dokaz je
mogućnost da proizvođač vozila može pratiti vozilo, te u slučaju kvara obavijestiti korisnika o
položaju najbližeg servisa.
Slika 7. Uređaj za instalaciju unutar vozila
23
2.8. Pasivno praćenje GPS vozila
Pasivan princip praćenja vozila bazira se na pamćenju određenih tačaka kojima je vozilo
prolazilo, a ne cjelokupnog puta. Sve informacije se spremaju na GPS uređaj, te se kao takve
mogu na računaru obraditi. Informacija dobivena ovom metodom statističke je prirode, jer se
njome mogu pratiti kretanja vozila, ali snimljeni podaci nisu u stvarnom vremenu, već se gleda
učestalost obilaska određenih mjesta.
2.9. Aktivno praćenje GPS vozila
Ova metoda se koristi kada se ukazuje potreba za informacijom o položaju koja je funkcija
vremena. Dakle, imamo periodično osvježavanje informacija te na taj način možemo detaljno
pratiti kretanje vozila. Osim položaja vozila, informacije koje se šalju mogu biti brzina, smjer i sl.
Slika 8. Izgled najpovoljnije rute putovanja
Da bi sistem bio funkcionalan za aktivno praćenje vozila, potrebne su sljedeće komponente:
1. Prenosni GPS uređaj,
2. Komunikacijski sistem ( prijemnik/odašiljač),
3. Geografske karte u digitalnom obliku.
Sistemi kao takvi su jednostavni za primjenu, jer pri nabavki sistema za GPS praćenje dobiva se
uređaj sa već učitanim kartama i sve što je potrebno jeste priključiti uređaj na napajanje u vozilu,
a kao komunikacijski sistem može poslužiti i mobilni telefon.8
8 Bošnjak, I.: Inteligentni transportni sustavi I, Fakultet prometnih znanosti, Zagreb, 2007.godina.
24

Najveću primjenu GPS je pronašao u:
- mobilnoj telefoniji,
- drumskom saobraćaju,
- GPS navigaciji,
- vodenom saobraćaju.
GPS omogućava efikasno snalaženje korisnika u urbanom prostoru, kretanje prema njihovim
krajnjim odredištima najpovoljnijim načinima i najkraćim putevima.
DGPS je vrsta relativnog pozicioniranja gdje monitorska stanica poznatog položaja prima
satelitske signale i izračunava pogreške. Taj podatak priopćava se korisnicima u određenom
području polumjera od oko 100-ak kkilometara. Da bi tačnije izračunao svoju poziciju, korisnik
treba posjedovati prijemnik za DGPS poruke uz odgovarajuće programe za njihovu obradu i
prezentaciju.
Određivanje položaja korisnika GPS sistema temelji se na mjerenju vremena preleta signala od
satelita iz čega se izračunava udaljenost prema izrazu:
l = c X tpr
gdje je:
l – udaljenost od satelita do korisnika
c – brzina svjetlosti u vakuumu
tpr – vrijeme proleta signala.
GPS postaje normalna dopunska oprema od početka ovog desteljeća poput ''air-condition'' ili CD-
R opreme. U pravokutnom koordinatnom sistemu razmak (l) između pozicije GPS korisnika i
staelita iznosi:
I = Pk - Ps
Gdje su Pk – koordinate korisnika, a Ps – koordinate satelita
Ako su poznate pozicije tri satelita i tačno vrijeme odašiljanja signala to sa satelita može se iz
sistema jednadžbi odrediti korisnikova pozicija. Vrlo je značajna vremenska preciznost i kontrola
frekvencija jer vremenska pogreška od 1 ns stvra pogrešku udaljenosti od 30 cm. Signal GPS-a
primjer je signala proširenog spektra (Spread Spectrum Signal) koji ima znatnu neosjetljivost na
smetnje i interferenciju. Sateliti rade na istoj frekvenciji uz dva nositelja:
L1 = 1575, 42 MHz
25

L2 = 1227, 60 Mhzza modulaciju se koriste dva koda :
- P kod (precision),
- C/A kod (Coarse Acquisition).
Brzina protoka bita C/A iznosi 1, 023 Mb/s i namjera mu je da posluži širokom krugu korisnika
uz manju preciznost. P kod ima brzinu protoka bita 10, 23 Mb/s i veliku preciznost, namijenjen je
ponajprije za specijalne korisnike. Kodovima se mogu koristiti oni koji raspolažu generatorom
istog koda kao i staelitski odašiljač, pri čemu je neophodna sinhronizacija generatora. Iz podataka
o putanjama satelita GPS prijemnik odabire 4 najpovoljnija satelita i generira njihove kodove radi
upoređivanja s kodovima satelita.
3. INTELIGENTNI TRANSPORTNI TERMINALI I SUČELJA
3.1 Pristup ITS reinženjiranju terminalnih sistema
Polazeći od temeljnih zamisli ITS-a i poznavajući prometno- inžinjerske i transportno-
tehnologijske probleme u transportnim treminalima moguće je pristupiti bitnom poboljšanju
performansi i reinženjiranju tog sistema. Tarnsportni terminalni sistemi općenito predstavljaju
početne i završne, odnosno tranzitne tačke transportnog procesa gdje putnik, roba ili pošiljka
ulaze u sistem ili izlaze iz sistema, odnosno mijenjaju mod prevoza.
Budući da se u terminalu mijenja i mod prevoza, može se govoriti o intermodalnim transportnim
terminalima za putnike i različite vrste terminala. U telekomunikacijskom prometu naziv terminal
odnosi se na korisnički uređaj: telefon, telefax, mobitel, PC komunikator itd.
Primjeri transportnih terminalnih sistema i tranzitnih sistema su:
- kolodvori i postaje u cestovnom prometu,
- kolodvori i postaje u željezničkom prometu,
- zračne luke,
- morske luke,
- robno-transportni terminali,
- logističko-distribucijski centri,
- Park&Ride sistemi.
26
Uvođenje ITS funkcionalnosti u transportne terminalne sisteme može bitno podići razinu
performansi kvalitetu usluga što se može mjeriti:
- većom produktivnošću prevozniak i davatelja terminalnih usluga,
- smanjenjem čekanja i vremenskih gubitaka za putnike,
- smanjenjem zagušenja prometnica,
- povećanjem sigurnosti i zaštićenosti putnika i tereta.
Pri temeljitom redizajniranju postojećih sistema potrebno je analizirati prevozne zahtjeve i
volumen prometa u određenom vremenu te trenutačne intenzitete protoka putnika, transportnih
događaja i tereta.
Sve dok je raspoloživi kapacitet ili propusna moć (C) u vremenu promatranja (T) manja od
ukupnog volumena prometa za promatrano razdoblje (t), postoji mogućnost poboljšanja
postojećeg sistema vremenskom preraspodjelom.
Osim toga, moguće je sistemskim upravljanjem potražnjom djelovati na prilagodbu polaznog
vremena i promjenu moda prevoza do odredišta. Performansa sistema predstavlja mjeru nekog
zahtjevanog ponašanja. Tarnsportni terminali su stavrnovremenski sistem tako da se procjena
performansi temelji na veličinama ostavrenih outputa i pravovremenosti.
U skladu sa poopćenim modelom prometnog sistema u terminalnim podsistemima, putnik, roba i
informacija ulaze u sistem, adaptiraju se za prevoz ili prenos mrežom te u krajnjem terminalu
napuštaju sistem uz obavljenu transportnu uslugu.
Za sistemski opis funkcija treminala koriste se input-output dijagrami procesa prilagođeni
konkretnom kontekstu. Pri tome je potrebno postići potrebnu razinu dekompozicije i
detaljiziranosti prikaza prilagođenoj informatičkoj obradi. Transportni entiteti (putnici, roba i
informacije) te prometni entiteti (vozila i dr.) čine osnovne inpute u procese koji se odvijaju u
terminalu.
Putnik može imati elektroničke načine plaćanja cestarine (kontaktne i beskontaktne kartice), roba
i pošiljke mogu se pratiti preko elektroničkih čipova ili ''tragova'' kao dio sistema Track&Trace.
Facilitatori procesa su odgovarajuća infrastruktura, objekti i uređaji koji omogućuju obavljanje
temeljnih i dodatnih funkcija terminala.9
9 Čauševid, S., Bošnjak, I.: Sustavsko inženjerstvo u transportu i komunikacijama, Univerzitet u Sarajevu Fakultet za saobračaj i komunikacije, Sveučilište u Zagrebu Fakultet prometnih znanosti, Sarajevo, 2006.
27

Izlaz iz procesa su ukrcana i ispravna vozila sa korisnim teretom te nepoželjni outputi: otpad,
onečišćenja idr.
Proces mora biti vođen, odnosno kontroliran tako da se osigura odvijanje željenih transformacija
inputa u outpute. Uspješnost funkcioniranja iskazuje se performansama, odnosno kvalitetom
usluga za krajnje korisnike.
Slika 9. Input-output model procesa u terminalu
Performanse terminala međusobno se isprepliću s pokazateljima kvalitet usluga za krajnje
korisnike (barijere pristupa, čekanje, sigurnost posluživanja, udobnost itd.).
Performanse terminala općenito se mogu iskazati pokazateljima kao što su:
- dostupnost,
- učinkovitost odvijanja procesa,
- prosječno čekanje u procesu terminalnog posluživanja,
- varijabilnost trajanja posluživanja,
- razina sigurnosti odvijanja procesa u terminalu,
28
- troškovi funkcioniranja terminala,
- pouzdanost,
- kvaliteta sučelja.
Razina performansi terminala i kvaliteta usluge za korisnika bitno ovise o veličini prometnog
opterećenja i varijabilnosti dolazaka korisnika i vozila. Veća varijabilnost dolazaka bitno
smanjuje razinu performansi terminala uz isto prometno opterećenje.
3.2. Prilagođavanje postojećih informacijskih sustava rješenjima ITS-a
Pri uvođenju ITS-a, u terminalnom sustavu će, u pravilu, već postojati neka rješenja
informacijskog sustava podržanog računalima. U taj sustav su investirana sredstva i ljudi su se
navikli s instaliranim sustavom tako da postoji otpor promjenama. Kod ITS reinženjiranja
potrebno je terminalni informacijski sustav definirati, razvijati i implementirati kao interni dio
ITS-a. Za razvoj informacijskog sustava za inteligentni terminalni sustav u pravilu će se koristiti
objektno orijentirani pristup i metode. Reinženjiranje znači temeljno preispitivanje načina
funkcioniranja sustava pri čemu se ne treba preopterećavati postojećim rješenjima. U skladu s
konceptom životnog ciklusa potrebno je definirati temeljne zahtjeve, postaviti konceptualni
model i razvijati sustav koji će zadovoljiti zahtjeve uz odgovarajuće odmjeravanje troškova i
koristi.Pri modeliranju procesa najviša razina je dijagram konteksta kojim se definira obuhvat
promatranja i određuju granice sustava od interesa. Funkcionalni procesi u terminalu
dekomponiraju se sve dok se ne dobiju tzv. primitivne funkcije odnosno aktivnosti koje dalje ne
treba razlagati. U analizi i projektiranju procesa u terminalnim sustavima potrebno je povezati
prometno inženjerska znanja sa primjenom analitičko dizajnerskih tehnika. Postoji veći broj
metoda i tehnika koje su primjenjive u modeliranju procesa u terminalima uz odgovarajudu
informatičku podršku. Terminalni sustav je stvarni dinamički sistav koji obavlja određene
funkcije, odnosno procese.10
10 Ezgeta Drago, predavanja na predmetu:’’Inteligentni transportni sistemi’’, Fakultet za saobraćaj i
komunikacije, Univerzitet u Sarajevu, š/k 2011/2012.
29
Slika 10. Terminalni informacijski sustav
Ulazi iz okoline mijenjaju stanje terminalnog sustava. Stanje sustava treba opisati sintezom
informacija o prošlosti kako bi se djelovanjem mogli postići poželjni izlazi. Promatranjem ili
mjerenjem prometnih veličina u terminalnom sustavu dolazi se do informacije o stanju sustava. U
bazama podataka sadržani su podaci koji opisuju sustav. Odgovarajući programi generiraju izlaze
iz baze podataka u obliku izvještaja, podrške odlučivanju i dr. Model procesa i model podataka
mogu se projektirati relativno neovisno pri čemu projektiranje modela procesa može prethoditi
modelu podataka ili obrnuto.
3.3. ITS u funkciji povećanja efikasnosti City logistike
Najuži centar grada u svim svjetskim metropolama, sa otprilike 1 do 2% od ukupne površine
grada inicira trećinu svih teretnih tokova.
3.3.1. Zadaci City logistike
Osnovni zadatak City logistike jeste redukcija ukupnog broja vožnji transportnih sredstava u
urbanim zonama i ublažavanje njihovih negativnih uticaja. Istraživanja su pokazala da se
primjenom ITS rješenja i telematskih sistema u City logistici mogu ostvariti sljedeći efekti:
1. Smanjenje troškova kompanija od 5 do 20%,
2. Smanjenje broja vozilo kilometara u gradskim sredinama do 60%,
30

3. Smanjenje broja pokretanja drumskih teretnih sredstava od 30 do 60 %,
4. Smanjenje broja ulazaka u pojedine gradske zone od 30 do 60%,
5. Veličina isporuke se povećava za 15%, a popunjenost vozila za preko 100%,
6. Smanjuje se potrebna radna snaga, vrijeme isporuke i emisija buke i štetnih gasova,
7. Povećava se pouzdanost isporuke.
3.3.2. City logistika i ITS u evropskim gradovima
Postoje mnogobrojni pozitivni primjeri upotrebe ITS-a u logistici u gotovo svim većim
gradovima u Evropi, a u nastavku su nabrojana najuspješnija rješenja. U Barseloni su napravljena
sljedeća poboljšanja: - napravljeno je 5000 uličnih zona za utovar/ istovar robe, - napravljene su
bočne trake „odvojene“ za saobraćaj u vršnim časovima, - svi novi barovi i restorani moraju da, u
okviru svojih prostorija, izgrade prostor za skladištenje.
Pozitivni primjer korištenja City logistike jeste u Osaki (Japan) gdje se primjenjuje zajedničko
korištenje istih teretnih vozila od strane većeg broja kompanija. Također imamo i globalnu
primjenu pojedinih ITS rješenja u logistici kao što su: napredni telematski sistemi GPS (Global
Positioning Systems), VICS (Vehicle Information and Communication Systems) i PHS (Personal
Handy- phone System).11
3.4. Telematski sistemi za prikupljanje podataka o radu vozila i vozača
Telematski sistemi za prikupljanje podataka o radu vozila i vozača omogućavaju obezbjeđivanje
informacija vezanih za rad vozila i vozača u cilju poboljšanja rada vozila:
- u pogledu potrošnje goriva,
- smanjenja troškova održavanja i osiguranja,
- povećanja bezbijednosti kretanja vozila.
Na osnovu podataka dobijenih od ove vrste sistema mogu se izvući zaključci za:
11 Deljanin Abidin, predavanja na predmetu:’’Logistika u transportu i komunikacijama’’, Fakultet za
saobraćaj i komunikacije, Univerzitet u Sarajevu, š/k 2010/2011.
31
- stil vožnje vozača,
- određivanje vozača kojima je potrebna dodatna obuka.
Većina proizvođača vozila danas obezbjeđuje ovu vrstu proizvoda kao sastavni dio orginalne
opreme:
DAF DAF tel Renault Alcatel
MAN Fleet telematics Scania Infotronics
Volvo Dynafleet Mercedes Benz Fleet Board
3.4.1. Fleet Board sistem
Fleet Board sistem predstavlja telematski internet servis razvijen u svrhu kvalitetnijeg upravljanja
voznim parkom.
Fleet Board sistem pruža sljedeće mogućnosti i usluge svojim korisnicima:
1. Praćenje vozila:
- obavještavanje o redovnim servisima;
- upravljanje sustavom u slučaju pojave otkaza;
- operativne analize (analize stanja);
- tekstualno komuniciranje;
- bilježenje podataka vezanih za putovanje;
- utvrđivanje lokacije vozila;
2. Obavljanje transporta
- plan rada za pojedine prevozne puteve;
- upravljanje pošiljkama i obavještavanje klijenata;
- pradenje odvijanja transportnog zadatka;
- analizu obavljenog transporta.
Osnovne komponente Fleet Board sistema su:
1. Telefonski aparat; 32

2. Komunikacijski modul;
3. Prekidači za promjenu funkcije Fleet Board sustava;
4. GPS antena;
5. Fleet Board GSM antena;
6. GSM primopredajni uređaj;
7. Fleet Board kontrolna jedinica;
8. Kompjuter povezan sa terminalom za vozača;
9. Teminal za vozača: ekran/tastatura.
Slika 11. Osnovne komponente Fleet Board sistema
Fleet Board kompjuter je sa jedne strane povezan sa GPS antenom koja se postavlja na retrovizor
suvozačevog mjesta i koja se koristi za određivanje trenutne lokacije vozila. Podaci koji se
33
smještaju na ovaj kompjuter mogu biti raspoloživi vlasniku vozila. Prijem i slanje podataka se
vrši putem GSM mreže. Za ovu svrhu potrebno je postaviti GSM antenu na krovu kabine vozila
koja je povezana preko GSM primopredajnog uređaja sa Fleet Board kompjuterom. Antena treba
da se postavi na što većoj visini jer je u tom slučaju potrebno manje energije za prijem signala
željenog kvaliteta. Podaci koji se prenose memorišu se u Fleet Board serveru. Ti podaci su
dostupni vlasniku vozila preko interneta uz unos odgovarajuće šifre za pristup. Na taj način
vlasnik vozila ima uvid u tehničko stanje vozila u svakom trenutku. Pored toga, vlasnik vozila
ima mogućnost skidanja podataka po povratku vozila u bazu, kao i utvrđivanja tehničkog stanja
pojedinih komponenti vozila priključivanjem dijagnostičkog aparata. Za prijenos podataka može
se koristiti i GPRS koji predstavlja poseban sustav u okviru GSM mreže. Umjesto protoka
podataka preko stalne veze, ovaj paket koristi mrežu jedino onda kada se pojave podaci koje
treba prenijeti. Podaci se prijenose do mreže pomodu IP40 tehnologije koja omogudava prenos
podataka bez direktnog povezivanja na prijemnik. Podaci se tako sakupljaju u pravilnom
redoslijedu za prijenos do prijemnika. Zahvaljujudi ovoj tehnologiji omogudeno je istovremeno
korištenje kanala za prenos podataka od strane više korisnika time se bolje iskorištava kapacitet
GSM mreže. Takođe ovakav način prenosa podataka je jeftiniji obzirom na količinu informacija
koje se prenose. 12
ZAKLJUČAK
12 Sokolija Kemo, predavanja na predmetu:''Nadzor i regulisanje cestovnog saobraćaja'', Fakultet za
saobraćaj i komunikacije, Univerzitet u Sarajevu, Š/k 2011/2012.34
ITS preorijentacija prometne politike znači prilagodbu načela, mjera i instrumentarija
usmjeravanja razvoja prometne infrastrukture i tehnologije usklađenih s općedruštvenim i
gospodarskim ciljevima. Održivi razvitak prometnog sustava podrazumijeva primjenu ITS
rješenja s integracijom različitih modova transporta i stvaranjem inteligentnih transportno-
logističkih mreža (ITLS).
Ciljevi iz nacionalne prometne politike i strategije razvitka prometa i informacijsko
komunikacijske infrastrukture početkom 21. stoljeća u uskoj su interakciji s razvojem ITS-a.
Naglasak je na preorijentaciji s cestovnog na druge ekološki i energetski povoljnije načine
prijevoza putnika i roba, uz cjelovitu transportnu uslugu od kraja do kraja.
Osim cestovnog prometa, ITS je prisutan i u drugim granama prometa (željezničkog, vodnog,
zračnog itd.). Program i projekti modernizacije željeznice uključuju niz rješenja koje treba
integrirati s ITS-om, a to su: napredni sustavi informiranja putnika, daljinsko upravljanje
prometom vozova, gradnja GSM mreže u većim kolodvorima, osiguranje cestovno-željezničkih
prelaza, osiguranje kololodvora i transportnih skladišta, poboljšanje procesa na pograničnim
kolodvorima.
Napredni učinci ITS rješenja u željezničkom prometu odnose se na smanjenje vremena čekanja i
gubitaka, uštede goriva i energije, povećanje sigurnosti i zaštite putnika i tereta, bolju
informiranost korisnika usluga, bolju integraciju itd. U pomorskoj navigaciji i zračnom prometu
već dulje vrijeme postoje tehnička i organizacijska rješenja koja se mogu uključiti u ITS kao
transmodalni sustav.
Budući da je ITS ključna odrednica razvoja prometa, transporta i logistike u prvoj polovici 21.
stoljeća, za očekivati je uključivanje značajnog dijela informatičke zajednice u te projekte. U
razvoju ITS-a primjenjuju se objektno orijentirane metode i pomagala, što je u skladu s razvojem
informatičke tehnologije.
LITERATURA
35
1. Bošnjak, I.: Inteligentni transportni sustavi I, Fakultet prometnih znanosti, Zagreb,
2007.godina. ;
2. Čauševid, S., Bošnjak, I.: Sustavsko inženjerstvo u transportu i komunikacijama,
Univerzitet u Sarajevu, Fakultet za saobračaj i komunikacije, Sveučilište u Zagrebu
Fakultet prometnih znanosti, Sarajevo, 2006. ;
3. Deljanin Abidin, predavanja na predmetu:’’Logistika u transportu i komunikacijama’’,
Fakultet za saobraćaj i komunikacije, Univerzitet u Sarajevu, š/k 2010/2011. ;
4. Ezgeta Drago, predavanja na predmetu:’’Inteligentni transportni sistemi’’, Fakultet za
saobraćaj i komunikacije, Univerzitet u Sarajevu, š/k 2011/2012. ;
5. Sokolija Kemo, predavanja na predmetu:''Nadzor i regulisanje cestovnog saobraćaja'',
Fakultet za saobraćaj i komunikacije, Univerzitet u Sarajevu, Š/k 2011/2012.
36