presentación de powerpoint - kalan · 2 dr. luis javier morales mendoza 3 introducción la...
TRANSCRIPT

1
Convolución
Dr. Luis Javier Morales Mendoza
Procesamiento Analógico de Señales
FIEC - UV
Dr. Luis Javier Morales Mendoza 2
Índice
11.1. Introducción
11.2. La función delta de Dirac
11.3. Definición de la convolución
11.3.1. propiedades de la convolución
11.3.2. Método Gráfico para la convolución
11.4. Tarea
2
Dr. Luis Javier Morales Mendoza 3
Introducción
La operación mas importante dentro de los sistemas lineales en tiempo
continuo es la operación conocida como convolución. Esta operación
abarca múltiples áreas para realizar el proceso de mezclado de dos señales
dentro de un sistema LTI las cuales son:
- Procesamiento de Señales
- Procesamiento de Imágenes
- Óptica
- Control
- etc.
x(t) h(t) y(t)
Dr. Luis Javier Morales Mendoza 4
Delta de Dirac 11.2. La función Delta de Dirac
La función delta de Dirac, (x), se define a través de la siguiente integral
Su enorme utilidad dentro de la teoría de sistemas lineales ha justificado su
aplicación.
Además, la controversia de este aspecto siempre han girado alrededor de
que la función delta de Dirac no define una función en el estricto sentido
de la palabra, sino más bien una relación funcional; y de hecho, la delta de
Dirac no posee ningún significado sino está dentro de integrales tales
como (11.1).
0fdxxxf
(11.1)

3
Dr. Luis Javier Morales Mendoza 5
Delta de Dirac
afdxaxxf
La definición de (11.1) es válida para cualquier función f(x) que sea continua
en x = 0. Por lo tanto, haciendo el cambio de variable, y = x + a y suponiendo
que f(x) es continua en x = a, la propiedad de desplazamiento de la función
delta de Dirac, se establece como (Figura 1):
más aun, e observa que
agafdxaxxgxf
(11.2)
(11.3)
Dr. Luis Javier Morales Mendoza 6
Delta de Dirac
x
y
(x – a) 1
x = a
Figura 11.1. Función delta de Dirac
Una de las representaciones mas comunes de la delta de Dirac es cuando se
da en términos de la derivada de la función escalón unitario u(x). Esta
relación establece que
dx
xdux (11.4)

4
Dr. Luis Javier Morales Mendoza 7
Delta de Dirac
donde, u(x) está definida como
00
01 xxu (11.5)
dtixtx exp2
1
a
xax
Tres propiedades elementales de la delta de Dirac son:
Complejo:
(11.6)
(11.7)
Escalonado:
Dr. Luis Javier Morales Mendoza 8
Delta de Dirac
n
i i
i
xg
xxxg
1 ''
'Funciones propias: (11.8)
Ejemplo 1. Demuestre que 14
1123
312 xxxx
Factorizando a g(x) se obtiene: (x + 1)(3x – 1) entonces las raíces son:
x1’ = 1/3 y x2’ = –1,
Se puede ver que n = 2. La derivada de la función es:
g’(x) = 6x +2
con g’(1/3) = 4 y g’(–1) = –4. Por lo tanto, la aplicación directa de la
propiedad de funciones propias nos da el resultado.

5
Dr. Luis Javier Morales Mendoza 9
Convolución
2
2
N
Nn
tnttxtx
11.3. Definición de la Convolución
Supongamos que una señal de excitación de banda limitada x(t) se aplica a la
terminal de entrada de un sistema lineal. Como x(t) es de banda limitada, x(t)
puede ser aproximada a una función de muestreo, tal como
en donde, N es el total de puntos de muestreo, (t) denota la función delta de
Dirac y t es la distancia de muestreo, conocida como intervalo de mues-
treo de Nyquist.
El intervalo de muestreo de Nyquist puede obtenerse de la frecuencia de
muestreo, esto es,
(11.9)
Dr. Luis Javier Morales Mendoza 10
Convolución
sft
1 (11.10)
ms ff 2
en donde, fs es la frecuencia de muestreo de Shannon. La frecuencia de
muestreo satisface la siguiente desigualdad
en donde, fm es la frecuencia mas alta que limita la excitación de entrada
x(t).
El concepto de convolución puede ser ilustrado en un diagrama a bloques
de la entrada y salida de un sistema lineal tal como en la Figura 11.2.
(11.11)

6
Dr. Luis Javier Morales Mendoza 11
Convolución
Figura 11.2. Respuesta de un sistema lineal espacialmente invariante
y(t)
y(t) x(t)
h(t)
x(t)
(t) h(t)
t t
t
t
t
t
Dr. Luis Javier Morales Mendoza 12
Convolución
dtxxnxtxtx
N
NN
t
2
2
0lim (11.12)
Así, observamos que la convolución de una función x(t) con una función
delta da la misma función.
Ya que el diagrama de bloques del sistema es lineal e invariante, la
excitación de salida es:
Con respecto a la (11.9), se puede observar que el intervalo de muestreo t
se aproxima a cero cuando el total de puntos de muestreo, N, se aproxima
a infinito. En este caso, la (11.9) converge a la bien conocida integral de
convolución, que es

7
Dr. Luis Javier Morales Mendoza 13
Convolución
2
2
N
Nn
tnthtxty
Como se muestra en la Figura 11.2, en donde h(t) es la respuesta
espacial al impulso del sistema. De nueva cuenta, cuando t 0, N
∞, y la (11.13) convergerá hacia la siguiente integral de convolución
(11.13)
dthxtnthtxty
N
NN
t
2
2
0lim
La función de convolución de las funciones x(t) y h(t), denotada como
x(t)h(t).
(11.14)
Dr. Luis Javier Morales Mendoza 14
Convolución 11.3.1. propiedades de la convolución
txththtx a) Conmutativa
dthxthtx
dyyhytx
Demostración:
Al realizar el cambio de variable, y = t – , se observa que, dy = –d y los
límites son, cuando , se tiene que, y – y cuando, – se
tiene que y .
dyyhytx

8
Dr. Luis Javier Morales Mendoza 15
Convolución
Haciendo el cambio de variable y .
tgtxthtxtgthtx
txthdtxh
thtgtxthtgtx
b) Asociativa
c) Distributiva
Dr. Luis Javier Morales Mendoza 16
Convolución
212121 ,,, tthttxtty
e) Convolución en 2D
tctgtf
d) Corrimiento:
si tctgtf
tctgtf
2121 tctgtf
9
Dr. Luis Javier Morales Mendoza 17
Ejemplo 2. Demostrar que .
Se tiene que por definición, la convolución esta dada como
por lo tanto
Realizando el cambio de variable como: = – t1, por lo tanto se tiene que
= t1 + y el diferencial queda d = d. Los límites de la integral están
dados como sigue: si entonces y si – entonces –,
por lo tanto
Convolución
2121 tttytthttx
dtthxthtx
dtthtxtthttx 2121
dttthxty 21 21 ttty ■
Dr. Luis Javier Morales Mendoza 18
Convolución Ejemplo 3. Demostrar que un sistema es invariante en el tiempo aplicando
el principio de la convolución.
dtxtx
Por definición se tiene que la señal de entrada de cualquier sistema puede
estar expresada como:
dtxty
tTth
dthx
■
txTty
dtTxtyPor lo tanto, si
se llega a

10
Dr. Luis Javier Morales Mendoza 19
Ejemplo 4. Se tiene una señal x(t) = u(t) que entra en un sistema LTI que
posee una respuesta al impulso h(t) = exp(–t)u(t) donde > 0, determine
la señal de salida y(t). dado que
y por definición, la función escalón esta dado como
Convolución
dthxthtxty
00
01
t
ttu
t
dtty0
exp
t
dt0
expexp
Por lo tanto se llega a
Dr. Luis Javier Morales Mendoza 20
Convolución
t
tty0
exp1
exp
0expexp1
exp tt
tutty
exp11
h(t) x(t) ? y(t) =

11
Dr. Luis Javier Morales Mendoza 21
Convolución
Figura 11.3. Señal excitadora del sistema x(t)
Dr. Luis Javier Morales Mendoza 22
Convolución
Figura 11.4. Respuesta impulsional del sistema h(t)

12
Dr. Luis Javier Morales Mendoza 23
Convolución
Figura 11.5. Salida del sistema y(t)
Dr. Luis Javier Morales Mendoza 24
Convolución
tutx tutth exp1
Ejemplo 5. Un sistema continuo esta definido por la suma y multiplicación
de tres respuesta, h1(t), h2(t) y h1(t) tal como se muestra en la figura, deter-
mine la salida del sistema.
tutth exp2
h1(t)
h2(t)
x(t) y(t)
thtxty Se tiene que

13
Dr. Luis Javier Morales Mendoza 25
Convolución
ththth 21
thtxthtxty 31
y donde
por lo tanto, la salida del sistema estará definida como
t t
ddty0 0
expexp
ttty
00exp
1exp
1
Dr. Luis Javier Morales Mendoza 26
Convolución
ttty
exp11
exp11
1exp
11exp
1 tt

14
Dr. Luis Javier Morales Mendoza 27
Convolución
Figura 11.7. Señal excitadora del sistema x(t)
Dr. Luis Javier Morales Mendoza 28
Convolución
Figura 11.8. Respuesta impulsional del sistema, h(t) = h1(t) + h2(t)

15
Dr. Luis Javier Morales Mendoza 29
Convolución
Figura 11.9. Salida del sistema y(t)
Dr. Luis Javier Morales Mendoza 30
Convolución 11.3.2. Método Gráfico para la convolución
*
2
2
t
f(t)
-2 2
3
t
g(t)
Paso 1. Remplazar la variable independiente t por en f(t) y g(t)
Paso 2. Invierta y traslade la función g(t) en el sistema de f(t)
Paso 3. recorra a g(t) hasta que inicie el traslape sobre f(t) como se
muestra en la siguiente imagen.

16
Dr. Luis Javier Morales Mendoza 31
Convolución 3
2
f() 2
-2 + t 2 + t
g(t-)
I. Cuando t < –2: Las dos funciones no se
traslapan y el área dentro del producto es
cero.
II. Cuando –2 t < 0: La parte de g(t)
traslapa parte de f(t) y el área dentro del
producto de las funciones es:
3
2
f() 2
-2 + t 2 + t
g(t-)
Paso 4. La convolución se divide en 5 partes los cuales son:
3
2
f() 2
-2 + t 2 + t
g(t-)
Dr. Luis Javier Morales Mendoza 32
Convolución
6
2
326
2
232
23)2(3
222
0
22
0
t
tt
d
tt
III. Cuando 0 t < 2: Aquí g(t) traslapa
completamente a f(t) y el área dentro del
producto es justamente:
3
2
f() 2
-2 + t 2 + t
g(t-)
6 22
3 23
2
0
22
0
d
IV. Cuando 2 t < 4: Parte de g(t) traslapa
a f(t) en forma similar al paso II.
V. Finalmente, cuando t 4, g(t) y f(t) no se
traslapan por lo que el área dentro del
producto es cero.
3
2
f() 2
-2 + t 2 + t
g(t-)

17
Dr. Luis Javier Morales Mendoza 33
Convolución
t
y(t)
0 2 4 -2
6
El resultado de la convolución es:
4 Para0
42 Para24 122
320 Para6
02 Para62
32 Para0
)(*)()(2
2
t
ttt
t
tt
t
tgtfty
Dr. Luis Javier Morales Mendoza 34
Convolución
c.o.c.0
211 ttg
c.o.c.0
211 ttf
c.o.c.0
502 ttg
c.o.c.0
211 ttf
b) Para dos señales cuadradas diferentes
b) Para dos señales cuadradas iguales
Ejemplo 5. Realice la convolución de:

18
Dr. Luis Javier Morales Mendoza 35
Convolución
Figura 11.10. Señal f(t) del sistema
Dr. Luis Javier Morales Mendoza 36
Convolución
Figura 11.11. Señal g(t) del sistema

19
Dr. Luis Javier Morales Mendoza 37
Convolución
Figura 11.12. Señal de salida del sistema, y(t)
Dr. Luis Javier Morales Mendoza 38
Convolución

20
Dr. Luis Javier Morales Mendoza 39
Convolución
Figura 11.13. Señal f(t) del sistema
Dr. Luis Javier Morales Mendoza 40
Convolución
Figura 11.14. Señal g(t) del sistema
21
Dr. Luis Javier Morales Mendoza 41
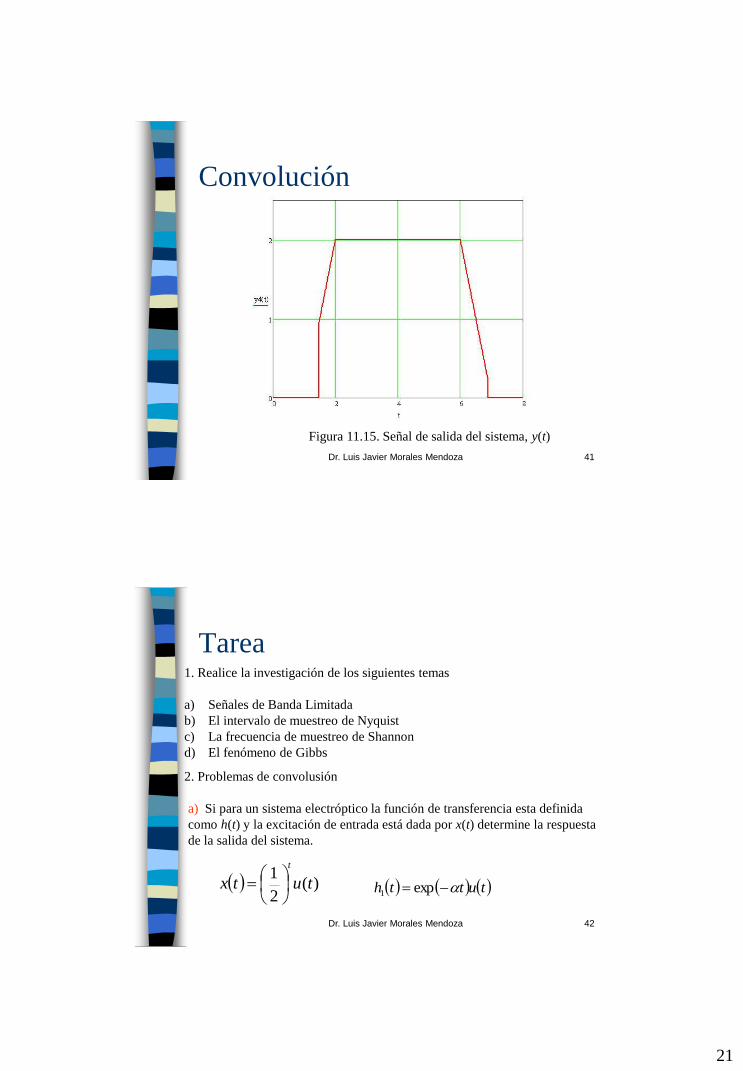
Convolución
Figura 11.15. Señal de salida del sistema, y(t)
Dr. Luis Javier Morales Mendoza 42
Tarea 1. Realice la investigación de los siguientes temas
a) Señales de Banda Limitada
b) El intervalo de muestreo de Nyquist
c) La frecuencia de muestreo de Shannon
d) El fenómeno de Gibbs
2. Problemas de convolusión
a) Si para un sistema electróptico la función de transferencia esta definida
como h(t) y la excitación de entrada está dada por x(t) determine la respuesta
de la salida del sistema.
)(2
1tutx
t
tutth exp1

22
Dr. Luis Javier Morales Mendoza 43
Tareas
3 tututx
b) Ahora, si la respuesta h(t) cambia a
Determine la salida del sistema y(t).
c) Por último, si el sistema mostrado esta compuesta por dos respuestas h1(t)
y h2(t) en: a) cascada y b) paralelo, (Figura 11.16) encuentre la señal de salida
para cada caso.
d) Determine la convolución entre la señal excitadora x(t) y la respuesta del
sistema h(t) a través del método grafico.
2 tututh
tutth exp2
Dr. Luis Javier Morales Mendoza 44
Tareas
h1(t) h2(t) x(t) y(t)
h1(t)
h2(t)
x(t) y(t) +
+
Sistema en paralelo y(t) = x(t) [h1(t) + h2(t)]
Sistema en cascada y(t) = x(t) h1(t) h2(t)
Figura 11.16