practiques de fisica 1r. curs arquitectura tÈcnicadfs.uib.es/apl/csp/fonfis/practiques/guions...
TRANSCRIPT

1
PRACTIQUES DE FISICA
1r. CURS ARQUITECTURA TÈCNICA

2
PRACTICA 1
A. Determinació de densitats amb el picnòmetre.
1 Objectiu.
L' objectiu d'aquesta pràctica és la determinació de les densitats d'un líquid i d'un
sòlid amb un picnòmetre.
2 Realització.
El picnòmetre és un petit pot de vidre que es prolonga en un tub vertical de petit
diàmetre (capilar), en el qual hi ha marcat un senyal d’arrasament (“enrase”), de
manera que es pot disposar repetidament d'un volum constant. Fent unes mesures de
massa, amb una balança, es pot determinar amb precisió el volum del picnòmetre i
densitats de líquids i sòlids.
2.1 Determinació del volum del picnòmetre.
Primer de tot hem de determinar el volum del picnòmetre. Per això, l’hem de
pesar buit i ben sec per a determinar la seva massa m0. A continuació, s'omple el
picnòmetre fins al senyal d'arrasament amb un líquid de referència de densitat coneguda
(en el nostre cas, aigua destil·lada). Després d’ajustar el nivell de líquid fins al senyal
d’arrasament, és important eixugar qualsevol gota que quedi sobre la superfície del
picnòmetre. Un cop eixut l’exterior del picnòmetre es torna a pesar per a determinar la
nova massa m. El volum del picnòmetre s'obté com:
0
0m-mV
ρ=
(1)
on ρo és la densitat del líquid de referència.
2.2 Determinació dl la densitat d'un líquid.
Buidau, netetjau i eixugau el picnòmetre. Introduïu el líquid problema fins al
senyal d'arrasament i pesau-ho. Novament, abans de pesar heu d’eixugar be l’exterior
del picnòmetre. La massa obtinguda l’anomenam m1. Com que el volum ocupat pel
líquid problema és el mateix que el del líquid de referència (tots dos iguals al volum del
picnòmetre), podem obtenir la densitat del líquid problema com:

3
V
mm 011
−=ρ , és a dir:
00
011 ρρ
mm
mm
−−
= (2)
2.2 Determinació de la densitat d'un sòlid.
S'omple el picnòmetre net i eixut fins al senyal d'arrasament amb el líquid de
referència i es pesa, m . Es pesa apart una certa quantitat de sòlid problema, ms.
S'introdueix el sòlid problema dins del picnòmetre i s’eixuga be l’aigua que vessa a fora
del picnòmetre. Aquest s'arrasa novament i es torna a pesar, m’ . Així la massa del
líquid de referència desallotjada pel sòlid serà:
∆m = m + ms - m' (3)
que correspon a un volum desallotjat
0ρm
VS∆=∆ (4)
El volum de líquid desallotjat és igual al volum del sòlid, de forma que la
densitat del sòlid ve donada per:
S
SS V
m
∆=ρ (5)
Repetiu cada determinació un mínim de dues vegades. S'ha de tenir present que
la densitat depèn de la temperatura, per tant és essencial que l'experiència es realitzi a
temperatura constant. Per aquesta raó, és recomanable que el picnòmetre no es tingui
molt de temps a les mans.
B. Mesura del coeficient de viscositat
1 Objectiu.
L'objectiu d'aquesta pràctica consisteix en mesurar el coeficient de viscositat η
d'un líquid problema, a una temperatura donada, amb el viscosímetre d’Ostwald.

4
2 Fonaments teòrics.
En un líquid en moviment existeix una força de fregament intern que s'oposa al
lliscament d'unes capes de líquid sobre les altres. Estudiarem aquest fenomen en el cas
més senzill possible: fluid en règim laminar (sense turbulències) i estacionari (flux de
líquid constant en el temps). Sota d'aquestes dues simplificacions, és vàlida la hipòtesi
de Navier. Segons aquesta, la força de fregament entre dues capes de superfície S molt
properes de fluid, separades per una distància dh, i que es mouen una respecte a l'altra
amb una velocitat relativa vdr , ve donada per:
dh
vdSF
rrη=
η és un factor de proporcionalitat que depèn de la temperatura T i de la naturalesa del
fluid i s'anomena coeficient de viscositat. Les seves unitats en sistema c.g.s. són g/cm.s
= poise.
La viscositat s’obtindrà aplicant la fórmula de Poiseuille, que relaciona el
coeficient de viscositat amb la quantitat de líquid que passa per segon, G, per un
capil·lar de radi i longitud determinada:
G =
k⋅ρη
(1)
essent ρ la densitat del líquid i k una constant que depèn de les característiques del tub,
així com de l'alçada o desnivell que origina la sortida del líquid pel tub.
Si un determinat volum de líquid V triga un temps t en passar pel capil·lar,
tendrem
V = G⋅ t =
k⋅ρ⋅ tη
(2)
Si es repeteix l'experiència per a dos líquids diferents, imposant que els volums
utilitzats d'ambdós líquids siguin iguals, de (2) s'obté:
η1
η2 =
ρ1 t1ρ2 t2
(3)
Per tant, coneguent la densitat dels dos líquids, si coneixem la viscositat d'un dels
líquids i els temps que tarden un i l'altre, es pot obtenir la viscositat de l'altre.

5
3 Realització de la pràctica
S’utilitzarà el viscosímetre d’Ostwald, el qual consisteix en un tub en U; a un dels
braços hi ha el capil·lar amb dos senyals (a i b) i a l’altre braç hi ha un dipòsit (c)
(vegeu la figura).
Posau aigua destil·lada en el viscosímetre pel braç amb el dipòsit (c) i aspirau per l’altre
braç fins fer passar la columna de líquid per damunt del senyal (a) , quedant l'altra
columna de líquid aproximadament a la meitat del dipòsit (c), tal com s'indica a la
figura. Mesurau el temps, t1 , que triga la columna en passar des de a fins a b. Repetiu
la mesura un mínim de dues vegades i feis el promig dels dos valors per obtenir el valor
final de t1 . Fent servir el mateix procediment es determina t2 amb el líquid problema.
Essent conegudes les densitats de l'aigua i del líquid problema, així com la viscositat de
l'aigua, la qual es pot trobar tabulada, ja es pot determinar la viscositat del líquid
problema amb l'expressió (3). Es important que a les mesures amb aigua i líquid
problema el nivell del líquid al dipòsit (c) sigui el més igual possible.
a
b
c

6
PRACTICA 2
Determinació de moments d’inèrcia
1.- Objectiu. A partir de l’estudi de les oscil·lacions d’una molla de torsió es volen
determinar els moments d’inèrcia de diversos cossos que oscil·len solidàriament amb
la molla.
2.- Fonament teòric: Un pèndol de torsió esta constituït per un cos que es mou realitzant
oscil·lacions angulars respecte a un eix, degut al moment d’una força elàstica
respecte al mateix eix. Aquesta força juga el mateix paper que la força de gravetat en
el pèndol simple.
En el cas d’una molla de torsió (molla en espiral fixada a un eix), quan
torçam la molla un angle ψ, apareix un moment recuperador M de sentit oposat a la
desviació feta i mòdul proporcional a l’angle desviat:
M = D ψ (1)
D és la constant recuperadora de la molla de torsió. La situació és completament
anàloga a una molla lineal estirada una distància x, la qual s’oposa a l’estirament
amb una força donada per la coneguda equació F = k x. En el pèndol de torsió hi ha
oscil·lacions angulars respecte a un eix; el moviment és circular i, aleshores, les
variables rellevants són moment i angle en comptes de força i distància.
L’equació dinàmica del moviment ve donada per :
M = I α = I d2ψdt2 (2)
on I és el moment d’inèrcia del cos respecte de l’eix de gir. El moment recuperador
s’oposa a l’augment de ψ . Aleshores: − D ψ = I d2ψdt2 (3)
que correspon a una equació típica del moviment harmònic simple. El període del
moviment valdrà:
T = 2π I
D (4) , d’on I =
T2D
4π 2 (5)

7
Per tant es pot calcular el moment d’inèrcia d’un cos que es fa oscil·lar
respecte a un eix mitjançant una molla - pèndol de torsió - a partir de la
determinació del període d’oscil·lació del pèndol.
La constant recuperadora de la molla es pot determinar de forma directa
aplicant una forca r F a damunt un punt situat a una posició
r r respecte de l’eix de
gir i mesurant l’angle desviat ψ . Si r F i
r r són perpendiculars, el moment serà
simplement M = F r . De (1) tendrem:
D = r F
ψ (6)
3.- Muntatge i realització.
3.1 Determinació de la constant de la molla.
Muntau el disc graduat a l’aparell d’oscil·lació format per l’eix de rotació i la
molla en espiral. Procurau que els perns estiguin ben estrets per tal que el disc sigui
solidari amb l’eix de gir. La força s’aplica estirant un dinamòmetre enganxat amb un
fil de nylon a la vora del disc, procurant que la direcció de la força aplicada sia
sempre tangent al disc (perpendicular al radi), tal com s’esquematitza a la figura 1.
Realitzau vàries mesures de la força aplicada F i de l’angle girat ψ . Per a
cadascuna de les mesures fetes, determinau D a partir de l’equació (6) i calculau el
valor mig. Determinau D amb un altre mètode: representau gràficament els parells
de valors (M,ψ) (l’angle expressat en radians) i trobau el pendent de la recta
mitjançant un ajust per mínims quadrats. A partir de la relació (1) és evident que el
pendent correspon a la constant D. Interpretar el significat del valor de l’ordenada a
l’origen.
Figura 1

8
3.2. Utilització de l’aparell
En aquesta part es practica la mesura del període d’oscil·lació i s’observa la
variació d’aquest quan canvia el moment d’inèrcia del cos que oscil·la. El cos és una
barra rígida centrada a l’eix d’oscil·lació amb dues masses mòbils iguals, una a cada
costat de l’eix. Variant la posició de les masses es fa canviar el moment d’inèrcia del
conjunt.
Realitzau el muntatge de la figura 2, amb la barra i les dues masses mòbils.
Procurau que els perns quedin ben estrets per tal que totes les parts siguin solidàries
amb les altres. Fixau les masses a la barra en forma simètrica respecte a l’eix de gir,
inicialment amb la major distància de separació possible.
Per a mesurar el període d’oscil·lació del pèndol heu de fer servir la porta
fotoelèctrica equipada amb un cronòmetre, la qual s’ha de utilitzar en el mode “O”
. Es posarà un trocet de paper adhesiu a un extrem de la barra per a fer
d’obturador del feix lluminós de la porta. El paperet ha de quedar de caire amb el
feix lluminós (vertical), per tal de millorar l’exactitud de l’obturació. Amb el pèndol
a la seva posició d’equilibri, situau la porta fotoelèctrica a prop del paperet
obturador. Girau el pèndol un angle d’uns 45º cap un costat i deixau oscil·lar el
pèndol. El període d’oscil·lació és la suma dels temps t i t’ per a fer les
semioscil·lacions a cada costat de la porta. Quan el pèndol es trobi a un extrem de la
seva oscil·lació es posa a zero el cronòmetre de la porta i es mesura el temps t per a
fer la semioscil·lació corresponent. Quan el pèndol es trobi a l’extrem contrari, es
torna a posar a zero el cronòmetre i es mesura el temps t’ de l’altra semioscil·lació.
El període serà T = t + t’ .
Figura 2

9
Per a cada posició de les masses (sempre situades simètricament a l’eix de
gir) mesurau al menys dues vegades cada un dels temps t i t’. Si els valors
obtinguts en cada repetició de la mateixa mesura són discordants, heu de fer una
tercera mesura (ò més) per a descartar el valor dolent. Com a valor del període, T,
considerau el valor mig dels calculats a cada mesura feta.. Tabulau els valors de T en
funció dels de r (essent r la distància del centre de les masses a l’eix de gir) i
calculau els valors del moment d’inèrcia I fent servir l’equació (5) (utilitzant el
valor de la constant D de la molla trobat abans). Representau gràficament els valors
de I en funció de r2 i extrapolau la gràfica per a r = 0. Interpretau físicament el valor de I per a r = 0 (valor que notarem com a Ir=o). 3.3 Mesura de moments d´inèrcia
En aquest apartat es mesuraran els moments d’inèrcia d’alguns cossos,
comparant sempre els resultats amb els valors teòrics. Les mesures del període es
realitzaran en forma anàloga a la descrita abans. Per a calcular els valors teòrics de I
s’han de mesurar la massa i dimensions dels cossos. 3.3.1 Moment d’inèrcia de la barra.
En aquest apartat es determinarà el moment d’inèrcia de la barra que gira
amb l’eix de rotació situat al centre de masses. Per això es trauran les dues masses
mòbils utilitzades a l’apartat anterior. Mesurau dues (ò més) vegades el període d’oscil·lació, feis la seva mitja i calculau Iexp amb la expressió (5). Comparau
aquest valor amb el de Ir=o de l’apartat anterior. Calculau el valor teòric de I i
comparau els resultats.
Determinau també el moment d’inèrcia de la barra que gira amb l’eix de
rotació situat a un dels extrems i comparar amb el corresponent valor teòric.
3.3.2 Moment d’inèrcia del cilindre Determinau el moment d’inèrcia dels cilindres ple i buit (fent servir un
paperet com a obturador) i comparau els valors obtinguts amb els de la teoria.
10
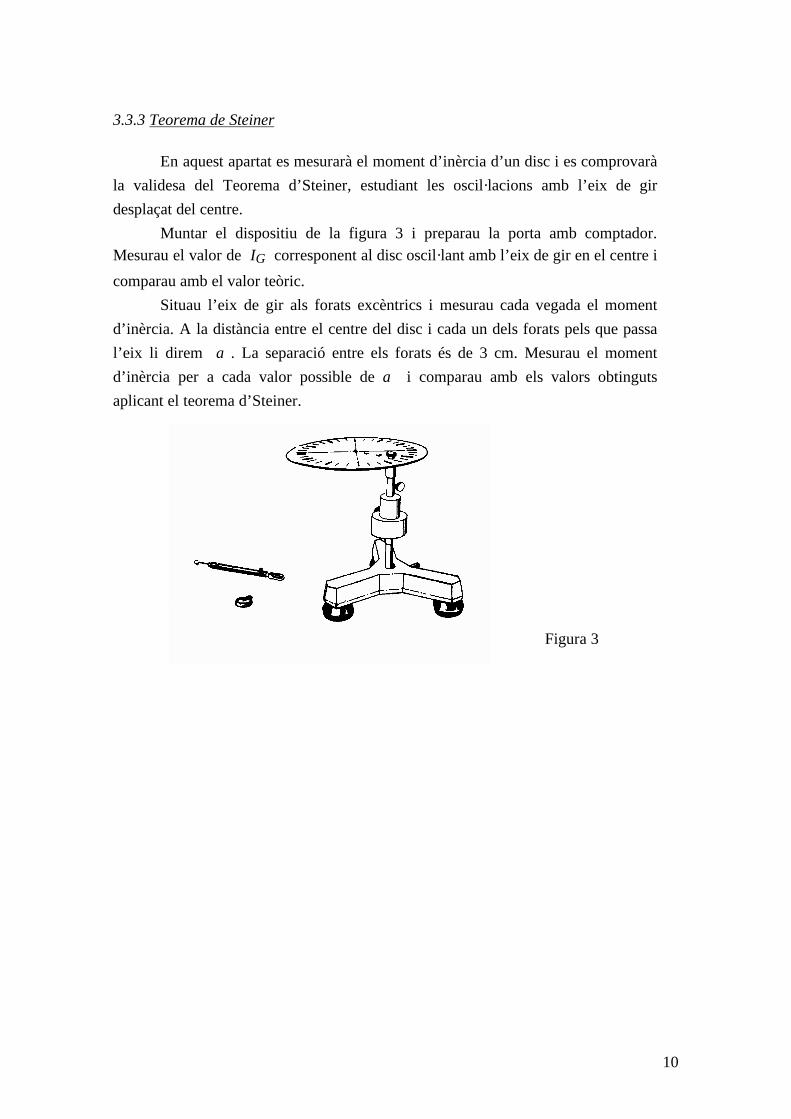
3.3.3 Teorema de Steiner
En aquest apartat es mesurarà el moment d’inèrcia d’un disc i es comprovarà
la validesa del Teorema d’Steiner, estudiant les oscil·lacions amb l’eix de gir
desplaçat del centre.
Muntar el dispositiu de la figura 3 i preparau la porta amb comptador. Mesurau el valor de IG corresponent al disc oscil·lant amb l’eix de gir en el centre i
comparau amb el valor teòric.
Situau l’eix de gir als forats excèntrics i mesurau cada vegada el moment
d’inèrcia. A la distància entre el centre del disc i cada un dels forats pels que passa
l’eix li direm a . La separació entre els forats és de 3 cm. Mesurau el moment
d’inèrcia per a cada valor possible de a i comparau amb els valors obtinguts
aplicant el teorema d’Steiner.
Figura 3

11
PRACTICA 3
Estudi de la flexió d’una barra 1. Objectius de la pràctica.
Es tracta d’estudiar la flexió de diferents barres planes d’un mateix material (en
el nostre cas es tracta d’un acer) sotmeses a càrregues perpendiculars (flexió a 3 punts),
determinant el mòdul de Young del material, així com la dependència de la flexió amb
l’amplada de la barra.
2. Fonaments teòrics.
Si a una barra homogènia de longitud L i secció uniforme s se
li aplica una força uniaxial F en la mateixa direcció de la barra,
aquesta experimenta una variació de longitud ∆L. Sempre que l’esforç
uniaxial aplicat, σ = F/s , no superi el límit d’elasticitat del material,
la deformació relativa ε = ∆L/L produïda és proporcional a l’esforç,
d’acord amb la llei de Hooke:
σ = Y ε (1)
on Y s’anomena mòdul de Young (o mòdul elàstic) del material en qüestió. L’expressió
(1) constitueix la forma més general de la llei de Hooke.
Aclariment: La coneguda expressió F = k ∆x , que s’aplica a la
deformació de les molles, no és més que una reescriptura de (1), on
l’anomenada constant de la molla k és funció del mòdul de Young del
material del que està feta i de la seva geometria (diàmetre del fil que
forma la molla, radi de curvatura de les voltes de la molla, separació
entre les voltes, etc...).
A un material molt rígid com l’acer, la deformació ∆L que es produeix amb una
força uniaxial en la direcció de la barra és molt petita i difícil de mesurar. En canvi, si
la força l’aplicam en direcció perpendicular al pla de la barra, aquesta es doblega i la
flexió resultant és molt major que el ∆L d’abans, i per tant, més fàcil de mesurar.
Emperò, la deformació per flexió és bastant més complexa que la deformació uniaxial:
L
F

12
quan la barra es flexiona hi ha una contracció del material que està a la part interior de
la corba que formarà la barra i una extensió del material de la part exterior.
En aquesta pràctica estudiarem un mode
de flexió anomenat flexió a 3 punts: la
barra descansa damunt dos punts separats
una distància L i s’aplica una força F
cap avall just en el punt mig dels dos que
suporten a la barra.
F
L
En aquest cas l’esforç σ i la deformació ε vénen donats per les expressions següents:
σ = 3 F L
2 a b2 (2)
ε = 6 λ b
L2 (3)
on a és l’amplada de la barra, b el seu gruix i
λ la flexió ocasionada per la força F. Substituint
(2) i (3) a (1) i aïllant la flexió s’obté:
λ = 1
4
L
b
3
F
a Y (4)
3. Muntatge i realització.
El sistema experimental està esquematitzat a la figura, amb el qual es pot
mesurar la flexió λ de la barra en funció de la força F aplicada. La separació entre els
dos suports de la barra ha d’esser aproximadament el 80% de la longitud de les barres i
constant durant tota l’experiència. S’ha de posar atenció a que les barres estiguin
perfectament horitzontals i que es recolzin damunt les arestes dels dos suports en tota la
seva amplada.
λ

13
peu de rei
A
B
La força s’aplicarà penjant diferents peses just en el punt mig dels dos suports de la
barra i la flexió es determinarà amb la vareta per a mesurar profunditats d’un calibrador
(peu de rei). Per això, es mesurarà la distància d entre l’estrep (A) del que pengen els
pesos i un punt fix (B), que està per damunt i que serveix per recolzar el peu de rei.
Aquest punt de recolzament (B) del peu de rei s’ha de fixar fortament en començar la
pràctica, a fi de que no es mogui durant totes les mesures. En mesurar la flexió s’ha
de tenir molta cura en procurar no fer cap força addicional amb el peu de rei
sobre la barra, per tal de no falsejar els resultats.
Es mesura inicialment la distància entre els punts A i B amb la barra descarregada, valor que anomenarem do. Desprès es van afegint els pesos un darrere l’altre, mesurant
cada vegada les distàncies di . La flexió serà en cada cas λ = di - do . En haver penjat
totes les masses, s’han d’anar descarregant una darrera l’altra, tornant mesurar a cada
descàrrega la flexió de la barra. Aquest procés s’ha de repetir amb totes les barres
disponibles, de les quals s’ha de mesurar amb el peu de rei la seva amplada a i gruix b.
4. Tractament de les dades.
Del gran conjunt de dades mesurades s’han d’obtenir els següents resultats:
a. El valor del mòdul de Young d’aquest acer.
b. Comprovar experimentalment la dependència de la flexió λ amb l’amplada a
de les barres donada per l’equació (4).
4.a Determinació del mòdul de Young
Utilitzant l’equació (4), es pot calcular un valor del mòdul de Young Y per a
cada parella de valors experimentals (F, λ) i els corresponents valors de a, b i L. S’ha
de calcular el valor mig dels diferents valors de Y trobats a una mateixa barra i
comparar els valors obtinguts en cada barra. Finalment, per a donar un resultat final, es
calcularà el valor mig dels obtinguts a totes les barres.

14
Un segon mètode per a determinar Y és mitjançant l’anàlisi global de les dades
obtingudes a cada barra, fent un ajust d’una recta per mínims quadrats als punts (F, λ)
mesurats a cada barra. D’acord amb l’equació (4), l’ordenada a l’origen d’aquesta recta
ajustada ha d’esser nul·la i el pendent k ha de valer:
k = 1
4 a Y
L
b
3
expressió d’on es pot obtenir Y. Novament trobarem un valor de Y per a cada barra, que
tractarem com en el cas anterior.
4b. Comprovació experimental de la dependència de λ amb a.
Anem a suposar a priori una dependència del tipus
λ = m an (5)
Es tracta de trobar els valors de m i n amb la informació experimental disponible. Si
comparam aquesta equació amb l’expressió teòrica (4), veim que hauria d’esser n = -1
i m = 1
4
L
b
3
F
Y
Per a obtenir m i n a partir dels resultats experimentals, notem que si prenem logaritmes
a l’expressió (5),
log λ = n log a + log m
queda una equació lineal per (log λ) en funció de (log a). De totes les mesures
realitzades s’han d’agrupar les parelles de valors (λ,a) corresponents a valors constants
de la força F i el gruix b i fer ajusts lineals per mínims quadrats dels punts (log a,log λ)
Els valors experimentals de n i log m seran, respectivament, el pendent i l’ordenada a
l’origen d’aquests ajusts. Comparau els resultats de n i m amb la predicció teòrica.
15
PRACTICA 4
Experiments d’estàtica
1. Objectius
En aquesta pràctica es realitzaran diversos experiments amb forces, moments i
equilibris de forces i moments. En particular es verificarà la llei de Hooke per a un
dinamòmetre, calibrant la seva constant. També s’estudiarà l’equilibri de tres forces
concurrents a un punt. Finalment, s’estudiarà l’equilibri d’una balança.
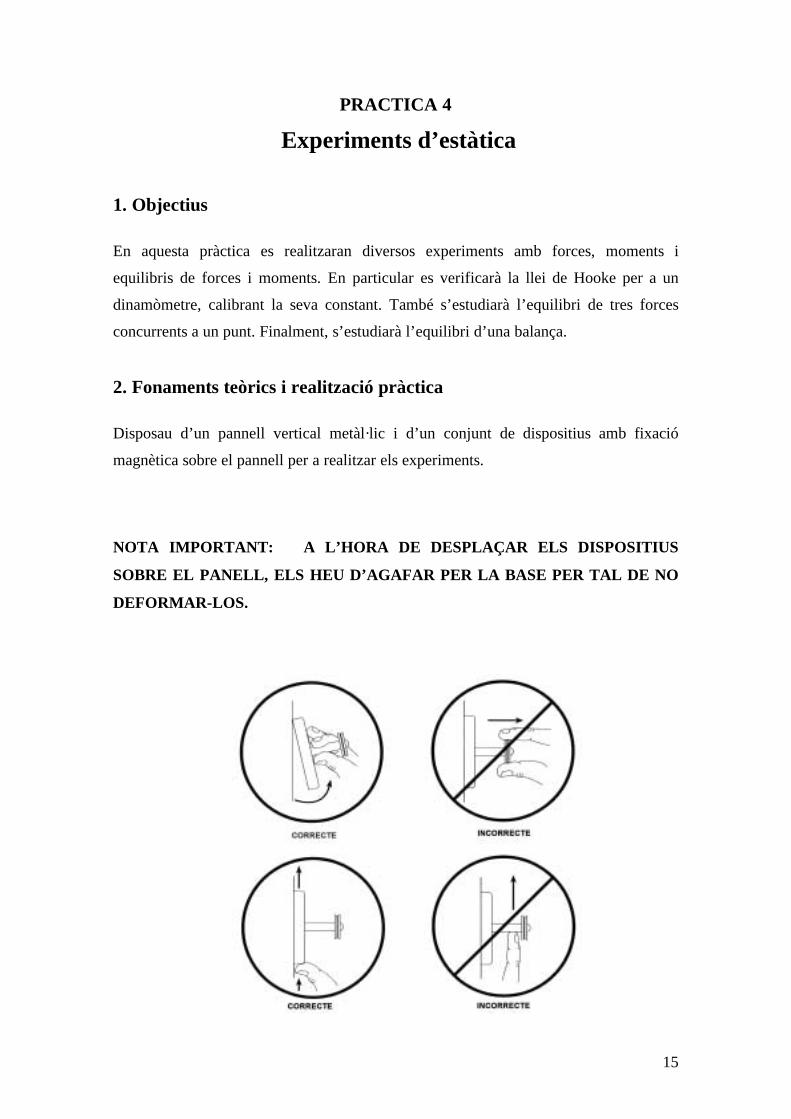
2. Fonaments teòrics i realització pràctica
Disposau d’un pannell vertical metàl·lic i d’un conjunt de dispositius amb fixació
magnètica sobre el pannell per a realitzar els experiments.
NOTA IMPORTANT: A L’HORA DE DESPLAÇAR ELS DISPOSITIUS
SOBRE EL PANELL, ELS HEU D’AGAFAR PER LA BASE PER TAL DE NO
DEFORMAR-LOS.

16
2.1 Llei de Hooke. Calibració del dinamòmetre
La llei de Hooke aplicada a una molla ens diu que el canvi de longitud d’una molla, ∆x,
és proporcional a la força, F, aplicada sobre la molla:
F = K ∆x
A la constant de proporcionalitat, K, se li diu la “constant de la molla”.
Per fer l’experiment fareu servir la molla d’un dinamòmetre. Es tracta de situar el
dinamòmetre en posició vertical a la part
superior del panell, anar penjant diverses
peses i mesurar l’allargament corresponent de
la molla, tal com s’esquematitza a la Figura 1.
La força aplicada en cada cas és el pes de cada
massa P = m g. Com a valor de
l’acceleració de la gravetat podeu agafar g =
9.8 m/s2. Teniu en compte que els suport de
les peses té una massa de 5 grams.
Construiu una taula m – P – ∆x. Feis la gràfica P vs. ∆x i comprovau la seva
linealitat. Determinau el valor de la constant de la molla del dinamòmetre, K, a partir de
l’ajust per mínims quadrats de la recta. Conegut el valor de la constant K, el
dinamòmetre queda calibrat; és a dir, mesurant l’allargament ∆x de la molla es pot
determinar la força real (F = K ∆x) amb més exactitud que amb la indicació de l’escala
de forces impresa sobre el dinamòmetre.
2.2 Equilibri de forces concurrents. Resultants i equilibrants.
La suma (vectorial) de les forces que actuen sobre un cos és la resultant. Si volem
equilibrar el cos, hem d’aplicar una força del mateix mòdul i direcció que la resultant,
però de sentit contrari. Aquesta és la força equilibrant.
Figura 1

17
A la pràctica aplicareu les forces sobre un anell mitjançant pesos penjats i politjes, per
tal de poder variar l’orientació de les forces
aplicades. Equilibrareu el sistema fent una força
amb el dinamòmetre, tal com s’esquematitza a la
Figura 2. L’anell ha de quedar equilibrat al centre
del disc graduat, el qual serveix per a mesurar
l’angle d’inclinació de les forces. Com que l’anell
pot fregar a vegades sobre el disc graduat, per
assegurar que l’equilibri de les forces és correcte,
convé que faceu un petit desplaçament de l’anell i
comproveu que té tendència a tornar a la posició inicial.
El mòdul de les forces F1 i F2 és, simplement, el pes de les masses M1 i M2 penjades,
mentre que el mòdul de Fe el determinau directament amb el dinamòmetre, a partir de
l’allargament de la molla i fent servir la calibració efectuada a l’apartat anterior. Els
angles θ1, θ2 i θ3 els llegiu directament sobre el disc graduat.
Amb totes les dades, dibuixau sobre paper milimetrat un esquema de les forces F1, F2 i
Fe (utilitzant, per exemple, una escala de 2 cm/N). Dibuixau la resultant de F1 i F2 i
determinau el seu mòdul i orientació. Comprovau si la força equilibrant que heu
mesurat equilibra exactament aquesta resultant. Si no és així, suggeriu causes possibles
de la discrepància.
2.3 Moment de les forces. Balança.
En aquest apartat s’estudia l’equilibri dels moments de les forces respecte d’un punt. El
moment M de la força F respecte del punt P és el producte vectorial
M = r x F
on r és el vector de posició del punt d’aplicació de la força respecte al punt P.
Figura 2
18
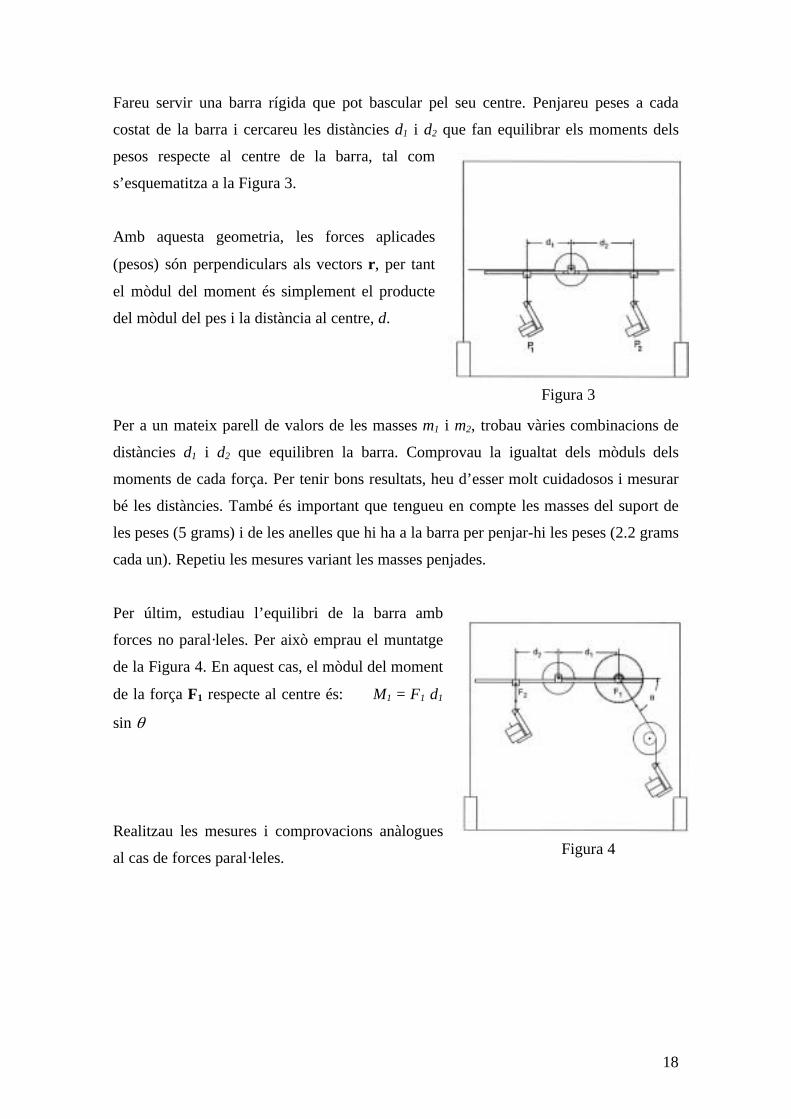
Fareu servir una barra rígida que pot bascular pel seu centre. Penjareu peses a cada
costat de la barra i cercareu les distàncies d1 i d2 que fan equilibrar els moments dels
pesos respecte al centre de la barra, tal com
s’esquematitza a la Figura 3.
Amb aquesta geometria, les forces aplicades
(pesos) són perpendiculars als vectors r, per tant
el mòdul del moment és simplement el producte
del mòdul del pes i la distància al centre, d.
Per a un mateix parell de valors de les masses m1 i m2, trobau vàries combinacions de
distàncies d1 i d2 que equilibren la barra. Comprovau la igualtat dels mòduls dels
moments de cada força. Per tenir bons resultats, heu d’esser molt cuidadosos i mesurar
bé les distàncies. També és important que tengueu en compte les masses del suport de
les peses (5 grams) i de les anelles que hi ha a la barra per penjar-hi les peses (2.2 grams
cada un). Repetiu les mesures variant les masses penjades.
Per últim, estudiau l’equilibri de la barra amb
forces no paral·leles. Per això emprau el muntatge
de la Figura 4. En aquest cas, el mòdul del moment
de la força F1 respecte al centre és: M1 = F1 d1
sin θ
Realitzau les mesures i comprovacions anàlogues
al cas de forces paral·leles.
Figura 3
Figura 4

19
PRACTICA 5
Descomposicions de forces. Forces de fregament
1. Objectius
En aquesta pràctica es realitzaran experiments de descomposició de forces en
components (utilitzant un pla inclinat) i determinacions de forces de fregament.
2. Fonaments teòrics i realització pràctica
Disposau d’un pannell vertical metàl·lic i d’un conjunt de dispositius amb fixació
magnètica sobre el pannell per a realitzar els experiments.
NOTA IMPORTANT: A L’HORA DE DESPLAÇAR ELS DISPOSITIUS
SOBRE EL PANELL, ELS HEU D’AGAFAR PER LA BASE PER TAL DE NO
DEFORMAR-LOS.

20
2.1 Descomposició del pes d’un cos sobre un pla inclinat.
Quan un objecte està col·locat sobre un pla inclinat un angle θ respecte a la horitzontal,
el seu pes P es pot descomposar en les components paral·lela al pla, Px, i normal (o
perpendicular) al pla, Py. Els mòduls d’aquestes components són:
Px = P sinθ Py = P cosθ (1)
Es tracta de determinar aquestes components de forma experimental. Inicialment,
mesurau la massa M del cos (cilindre metàl·lic) i el seu pes P = Mg . Per mesurar la
component Px (paral·lela al pla inclinat), emprau el muntatge de la Figura 1; per això
heu de penjar una determinada massa M’ i ajustar
l’angle d’inclinació per tal de que s’arribi a
l’equilibri. En aquesta condició, la component
paral·lela serà igual al pes penjat: Px = M’ g .
Per fer una bona mesura és molt important que
situeu la politja de forma que el fil que surt del
cilindre vagi ben paral·lel al pla inclinat.
Comparau aquest valor amb el teòric de l’equació
(1).
Per a mesurar la component Py, (perpendicular al pla inclinat), situau el dinamòmetre
amb una segona politja tal com s’indica a la Figura
2. Novament és molt important que el fil que surt
del cilindre vagi, en aquest cas, ben perpendicular
al pla inclinat i que el fil que va cap al dinamòmetre
estigui ben vertical. Desplaçau verticalment el
dinamòmetre fins que el cilindre comenci a aixecar-
se del plà. En aquest moment es compensa la força
del dinamòmetre amb la component normal Py.
Determinau el valor de la força del dinamòmetre,
mesurant l’elongació de la molla i fent servir la
seva constant calibrada. Comparau novament el valor experimental de Py amb el teòric
Figura 1
Figura 2

21
de l’equació (1).
Repetiu tot per a diferents valors de l’angle d’inclinació.
2.2 Forces de fregament.
Un objecte que llisca damunt una superfície experimenta una força de fregament que
s’oposa al moviment. Les causes microscòpiques del fregament són bastant complexes,
però, en general, el mòdul de la força de fregament és proporcional a la component del
pes del cos normal a la superfície.
Ffr = PN µ
Si la superfície és horitzontal, PN = P = mg, essent m la massa total del cos.
La constant de proporcionalitat, µ, és el coeficient de fregament, el qual depèn del
material i altres característiques (tals com rugositat) de la superfície i de la cara del cos
que llisca sobre la superficie.
Per a la determinació experimental de Ffr fareu servir el muntatge de la Figura 3
L’objecte que llisca és un bloc de fusta, sobre el qual es poden posar diferents masses
per a poder variar-ne el pes total. Es tracta de posar un cert pes a damunt el bloc de
fusta, i ajustar la massa penjada de la politja fins que el bloc de fusta comenci a lliscar
quan se li doni un petit copet i segueixi lliscant
amb velocitat petita i constant. Si el bloc s’atura
de seguida vol dir que la massa penjada és massa
petita, en canvi si el bloc es va accelerant, la
massa penjada és massa gran. D’aquesta manera,
la força de fregament serà, aproximadament, igual
al pes total penjat (recordau que el suport de les
masses penjades fa 5 grams). Repetiu la mesura
per a diversos pesos posats a damunt del bloc de
fusta i construïu una taula P - Ffr , a on P és el pes total del bloc de fusta i masses
posades a damunt. Representau gràficament Ffr en funció de P, comprovau la linealitat
Figura 3

22
de la gràfica i determinau el coeficient de fregament mitjançant un ajust per mínims
quadrats.

23
PRACTICA 6
Llei de Hooke i oscil·lacions d'una molla.
1.Objectius.
Els objectius d'aquesta pràctica són dos: en primer lloc, comprovar que una molla
verifica la Llei de Hooke de proporcionalitat entre allargaments i forces. En segon lloc,
determinar la constant elàstica de la molla seguint dos procediments, l'un a partir de la
pròpia Llei de Hooke i l'altre a partir de la mesura del període d’oscil·lació d'una massa
suspesa de la molla.
2. Fonaments teòrics.
Suposem un cos situat sobre una superfície horitzontal, sense fregament, unit a
una molla. Si la molla s'allarga a partir de la seva longitud natural, el cos s'accelera;
aleshores, d'acord amb la segona Llei de Newton, la molla efectua una força F sobre el
cos:
F = m a (1)
En el cas de molles corrents i per a petits allargaments, la deformació de la molla
és completament elàstica, amb la qual cosa la relació entre la força que fa la molla sobre
el cos i l'allargament de la molla és lineal, verificant-se la Llei de Hooke:
F = k ∆x (2)
on k és l'anomenada constant elàstica de la molla i ∆x és l'allargament experimentat per
la molla. Aquesta relació lineal només és vàlida per a valors de ∆x petits i deixa
d’esser-ho quan es supera el límit d'elasticitat de la molla, a partir del qual aquesta
queda permanentment deformada.
Quan es suspèn una massa m d'una molla, es produirà un allargament ∆x produït pel pes de la massa. Essent gmP rr
= , la segona Llei de Newton aplicada a la massa m
en la posició d'equilibri ens diu:
0rrr
=+ PF (3)
d'on
F = P (4)
Quan es combina aquesta equació amb la Llei de Hooke (2) obtenim:

24
mgxk =∆ (5)
expressió a partir de la qual poden calcular la constant k mesurant les masses i els
allargaments, a la vegada que es comprova la proporcionalitat.
A més, la Llei de Hooke indica que la força recuperadora d'una molla és de tipus
harmònic (força proporcional al desplaçament) i per tant, si la massa m es fa oscil·lar
verticalment, ho farà amb un moviment harmònic simple de període T, donat per:
T = 2π m
k (6)
3. Realització de la pràctica.
Es disposa de boles de plom que, per separat o agrupant algunes d’elles,
s’utilitzaran com a masses de prova i un regle milimetrat per a mesurar l’allargament de
la molla. Prèviament es determinaran els valors de les masses de les boles amb una
balança. La realització és molt simple: es tracta de penjar les boles a la molla i mesurar
l'allargament produït x∆ . Feis un mínim de 10 mesures dels allargaments produïts per
masses diferents entre si (combinant adequadament les boles de plom). Es procurarà
que els allargaments de la molla no siguin massa grans, evitant que quedi
permanentment deformada.
Per a cada una dels parells de valors massa-allargament es determinarà el valor de
k segons l'expressió (5) i es calcularà el valor mig . De la representació gràfica de les
parelles de valors de mg i x∆ , es constatarà que la relació entre aquestes magnituds és
lineal, és a dir, se satisfà la Llei de Hooke. També, ajustant una recta per mínims
quadrats als parells de valors, es trobarà el valor de k a partir del valor del pendent de la
recta ajustada.
L'equació (6) també permet determinar el valor de k mitjançant l’estudi de les
oscil·lacions de la molla. S’ha de fer a partir d'una col·lecció de valors T i m obtinguts
de la següent forma: es penja una massa a la molla i es fa oscil·lar desplaçant-la
verticalment de la seva posició d'equilibri una distància petita. S’ha de determinar el
període d’oscil·lació mesurant el temps per a fer 10 oscil·lacions. Aquesta operació es
repetirà tantes vegades com boles de plom ho permetin, fent les combinacions
adequades i procurant que la massa no sigui excessivament petita. S’ha de procurar que
les oscil·lacions siguin tan més verticals com sigui possible. Si en haver començat a
oscil·lar, la molla es desvia lateralment en forma important, aturau les oscil·lacions i
repetiu la mesura.

25
Representant gràficament T2 en funció de m i ajustant una recta pel mètode de
mínims quadrats als punts obtinguts, deduïu el valor de k a partir del valor del pendent
d'aquesta recta.