part a unit 1 introduction to mechatronic systems
TRANSCRIPT

PART A
UNIT 1
Introduction
1
Introduction
to
Mechatronic Systems

Learning objectives
By the end of this the student should be able toUnderstand the meaning of ‘mechatronics’ and its
evolutionDefine a systemUnderstand different types of system
2
Understand different types of systemDifferentiate between measurement and control
systems Identify measurement and control systems and their
elements along with their functionsAdvancements in the field of mechatronics with
microprocessor based controllers

Overview
Mechatronics is the integration ofElectronic, electrical, Computer technologyand control engineering with Mechanicalengineering.
3
This field provides a wide range ofapplications relevant to both industry andhousehold appliances
The word was coined by Japanese tohighlight the integrated approach

Evolution
1. Primary level mechatronics: This incorporatesI/O devices such as sensors to activate valves
2. Secondary level mechatronics: Integrateselectronics into electrically controlled devicessuch as cassette players
4
such as cassette players3. Third level mechatronics: Introduces ‘smart
system’ by incorporating application specifiedintegrated circuits (ASIC) like CNC machines,Automatic washing machines
4. Fourth level mechatronics: Incorporates‘intelligent control’ with fault detection andisolation (FDI) capability systems and fuzzylogic.

Systems
System can be thought of as a unit which has aninput and output devices and is prepared toperform some defined function.
It is not important here to discuss the function ofthe process but only concerned with the inputand the output
5
the process but only concerned with the inputand the output
Ex: A motor can be thought of as system withelectric input and rotation of the shaft as theoutput.
A system can be a measurement system or acontrol system
Input OutputMotor

Measurement system
It can be thought of as a black boxcarrying out the action of measurement.
It has an input quantity to be measuredand the output as the value of that quantity
6
and the output as the value of that quantity
Input Output
Temperature Value of that temp. on a centigrade scale
Thermometer

Elements of measurement system
A measurement system consists of the following elements
1. Sensor: responds to the quantity being measured byas its output a signal related to the quantity. Ex:Thermocouple
2. Signal conditioner: this is the unit that takes the signalfrom sensor and transforms it to such a condition that it
7
2. Signal conditioner: this is the unit that takes the signalfrom sensor and transforms it to such a condition that itcan be either displayed or controlled. Ex: Amplifier
3. Display unit: this is where the output from the signalconditioner is seen. Ex: Dial indicator
Quantity Value of the
Being quantity
measured SensorSignal
conditioner Display

Control system
Control means regulate, manipulate oradjust
Body temperature control is the naturalcontrol system
8
control system
This can be thought of as a black boxwhich is used to control the output to aparticular value or a sequence of values
Input Output
Speed Value of the desired speed
Regulator

Elements of control system
Feed back unit is the most importantelement of the control system
Ex: body temperature control
9
There are two basic forms of controlsystems, viz. open loop and closedloop system

Open loop systems
Open loop system is a control system in whichthe output is dependent on the input but theinput or controlling action is independent of theoutput or change in the output.
Input Electric Outputswitch Motor
10
Input Electric Output
On/off power speed change
It is relatively simple, low cost, easy tounderstand and maintain, stability and reliabilityis relatively good
Its disadvantages are inaccuracy, slow inresponse, no optimized control
switch Motor
Closed loop system
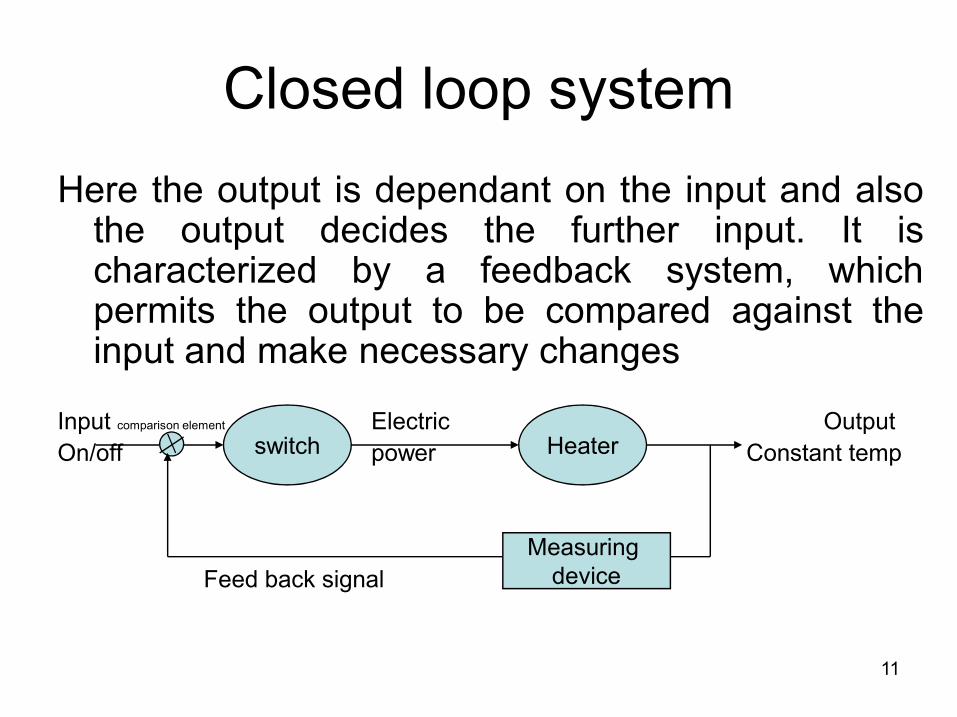
Here the output is dependant on the input and alsothe output decides the further input. It ischaracterized by a feedback system, whichpermits the output to be compared against theinput and make necessary changes
11
input and make necessary changes
Input comparison element Electric Output
On/off power Constant temp
Feed back signal
switch Heater
Measuring device

Closed loop systems are relativelyaccurate due to feed back control,however they are complex and obviouslycostly.
They have greater chances of breakdownas the number of components are more.
12
as the number of components are more.

Elements of closed loop systems
Comparison
element
Reference
Value Error controlled
signal variable
Controlunit
Correction unit
Process
13
measured value
1. Comparison element
2. Control element
3. Correction element
4. Process element
5. Measurement element
Measuringdevice
1. Comparison element
This compares the required or referencevalue of the variable condition beingcontrolled with the measured value of whatis being achieved and produces an errorsignal.
Error signal = reference value signal – measured value signal
14
Error signal = reference value signal – measured value signal
The feed back is said to be negativefeedback when the signal which is fedback subtracts from the input value.
The feed back will be positive when thesignal fed back adds to the input signal

2. Control element
This decides what action to take when itreceives an error signal may be to operatea switch or to open a valve
A control unit can be mechanical systemwhich is fixed or a programmable systemwhich can be altered by reprogramming
15
which can be altered by reprogramming
3. Correction unit
This produces a change in the process tocorrect or change the controlled condition
The term actuator is used for the elementthat does the job of correction

4. Process element
the process is what is being controlled. Itcould be the temperature of the room orthe speed of the fan, etc.
5. Measurement element
This produces a signal related to the
16
This produces a signal related to thevariable condition of the process that isbeing controlled. In other words thisactually measures the output value.
17

Various elements of controlling the room temperature
Controlled variable – the room temperatureReference value – the required room
temperatureComparison element – the person comparing
the measured value with the required value
18
the measured value with the required valueError signal – the difference between the
measured and the required valueControl unit – the personCorrection unit – the switchProcess – the heating by the heaterMeasuring device – the thermometer

19
Various elements of controlling the water level in the tank

Various elements of controlling the water level in the tank
Controlled variable – the water level in the tankReference value – initial setting of the float to the
level requiredComparison element – the leverError signal – the difference between the
20
Error signal – the difference between the measured and the initial setting of the lever positions
Control unit – the pivoted leverCorrection unit – the flap opening or closing the
water supplyProcess – the water level in the tankMeasuring device – the float ball and the lever

Sequential controllers
The above term is used when control isexercised in such a way that the actionsare strictly ordered in a time or eventdriven sequence
21
driven sequence
Ex: Washing machine which can becontrolled either by programmed controlleror CAM operated switch

22

Microprocessor based controllers
1. Automatic camera
2. Automatic engine system
23

Microprocessor based controllers
24

25

26

Advantages of mechatronics
1. The products are of high quality
2. The synergy produces a good performancecharacteristics
3. High degree of flexibility
27
3. High degree of flexibility
4. Machine utelisation is high
5. Capital expenses are reduced as amechatronic parts are better than sum of itsparts
6. They are user friendly and are highly reliable

Disadvantages of mechatronics
1. The existing system has to be replacedby the new system which is a veryexpensive process
2. Hence the initial cost will be high
28
2. Hence the initial cost will be high
3. Very difficult to obtain human resourcefrom various fields at one place
4. Specific problems have to be dealt byspecific people only