outline informatique visuelle - vision par ordinateur ... · informatique visuelle - vision par...
TRANSCRIPT
Informatique visuelle - Vision par ordinateur
Motion and tracking
Elise Arnaud
thanks to E. Memin, A. Boucher, Y. Ukrainitz, B. Sarel, K. Grauman, S. Lazebnik, B. Leibe for slide
inspiration.
Elise Arnaud M2P UFR IMA
Outline
Introduction
General framework: from 3D to 2D
Problems
Motion detection
Motion field estimation
Tracking
Elise Arnaud M2P UFR IMA
Outline
Introduction
General framework: from 3D to 2D
Problems
Motion detection
Motion field estimation
Tracking
Elise Arnaud M2P UFR IMA
Framework: multi-image analysis
Cameras :
sensors of variable geometry, of low price and easy to use
but : useful information is difficult to extract from the images
Perception et understanding of the environnement from images:
one image : 2D projection of the 3D world ⇒ incomplete andstatic information
several images : richer information on 3D and/or temporalthanks to spatial and/or temporal redundancy
using several images ⇒ match up information
Elise Arnaud M2P UFR IMA

Framework: multi-image analysis
Cameras :
sensors of variable geometry, of low price and easy to use
but : useful information is difficult to extract from the images
Perception et understanding of the environnement from images:
one image : 2D projection of the 3D world ⇒ incomplete andstatic information
several images : richer information on 3D and/or temporalthanks to spatial and/or temporal redundancy
using several images ⇒ match up information
Elise Arnaud M2P UFR IMA
Human vs computer
Visual system : images and a priori knowledge (size, behaviour,spatial organization, object dynamics, etc.)
one eye (+ a priori)
no motion vague qualitative info on the 3D scenehead motion more reliable info on the 3D scenescene motion perception of apparent motion and info on the 3D scene
two eyes (+ a priori)
no motion good perception of relative depthshead motion even more reliable info on the 3D scenescene motion 3D perception of motion and structures
Elise Arnaud M2P UFR IMA
Human vs computer
Visual system : images and a priori knowledge (size, behaviour,spatial organization, object dynamics, etc.)
one eye (+ a priori)
no motion vague qualitative info on the 3D scenehead motion more reliable info on the 3D scenescene motion perception of apparent motion and info on the 3D scene
two eyes (+ a priori)
no motion good perception of relative depthshead motion even more reliable info on the 3D scenescene motion 3D perception of motion and structures
Elise Arnaud M2P UFR IMA
Human vs computer
Visual system : images and a priori knowledge (size, behaviour,spatial organization, object dynamics, etc.)
one eye (+ a priori)
no motion vague qualitative info on the 3D scenehead motion more reliable info on the 3D scenescene motion perception of apparent motion and info on the 3D scene
two eyes (+ a priori)
no motion good perception of relative depthshead motion even more reliable info on the 3D scenescene motion 3D perception of motion and structures
Elise Arnaud M2P UFR IMA

Human vs computer
Computer vision : image sequences and very few a priori ...
motion may be due to :
movement in scene
movement of camera (ego motion)
Elise Arnaud M2P UFR IMA
Use of motion
Analyzing motion can be useful for
estimating 3D structure
Segmentation of moving objects
tracking objects, features over time
Motion is a very important feature !
see videos
Elise Arnaud M2P UFR IMA
Applications
medical imagery (echography, endoscopy)
robotics (to avoid obstacles, environment perception)
satelitte imagery (meteorology, oceanography, remotedetection)
road trafic (surveillance, driving help )
human motion analysis (hmi, sport gesture)
image synthesis, animation (e.g. augmented reality)
codage and video compression
military applications
tool for experimental sciences (fluid mechanics, biology, etc.)
...
Elise Arnaud M2P UFR IMA
Outline
Introduction
General framework: from 3D to 2D
Problems
Motion detection
Motion field estimation
Tracking
Elise Arnaud M2P UFR IMA
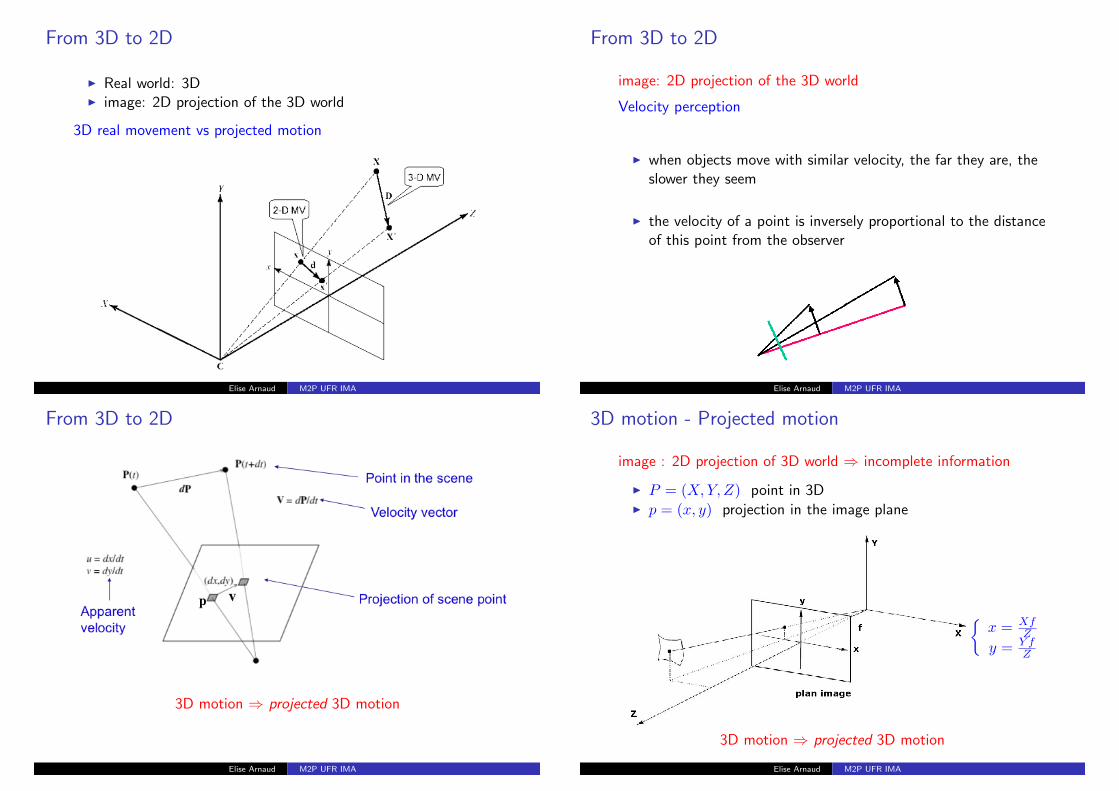
From 3D to 2D
Real world: 3D image: 2D projection of the 3D world
3D real movement vs projected motion
Elise Arnaud M2P UFR IMA
From 3D to 2D
image: 2D projection of the 3D world
Velocity perception
when objects move with similar velocity, the far they are, theslower they seem
the velocity of a point is inversely proportional to the distanceof this point from the observer
Elise Arnaud M2P UFR IMA
From 3D to 2D
3D motion ⇒ projected 3D motion
Elise Arnaud M2P UFR IMA
3D motion - Projected motion
image : 2D projection of 3D world ⇒ incomplete information
P = (X,Y, Z) point in 3D p = (x, y) projection in the image plane
x = Xf
Z
y = Y fZ
3D motion ⇒ projected 3D motion
Elise Arnaud M2P UFR IMA

3D motion - Projected motionP = (X,Y, Z) point at the surface of a solide whose 3D motion is:
.X.Y.Z
=
ABC
+
Ω1
Ω2
Ω3
∧
XYZ
Elise Arnaud M2P UFR IMA
3D motion - Projected motion
v = (u, v) motion of the projected point p = (x, y) (case f = 1)
x = Xf
Z
y = Y fZ
⇒
u =.x=
.XZ−
.ZX
Z2
v =.y=
.Y Z−
.ZY
Z2
u =
.x= A
Z + Ω2 − Ω3y − xCZ − Ω1xy + Ω2x2
v =.y= B
Z + Ω1 + Ω3x− yCZ + Ω2xy − Ω1y2
From 3D motion, we can calculate the projected motion.
reciprocal rarely true ... (⇒ use several cameras !).
Elise Arnaud M2P UFR IMA
3D motion - Projected motion
Few exemples, fixed scene (no moving object)
Pure translation of the camera along the X axis: A = 0
⇒ 2D translation: apparent velocity horizontal, and module inverselyproportionnal to the depth
Pure translation of the camera along the Z axis: C = 0
⇒ 2D divergence: zoom on the image
Pure rotation of the camera around the Z axis: Ω3 = 0
⇒ 2D rotation
Pure rotation of the camera around the X axis: Ω1 = 0
⇒ 2D translation
Elise Arnaud M2P UFR IMA
3D motion - Projected motion
Few exemples, fixed scene (no moving object)
Pure translation of the camera along the X axis: A = 0
⇒ 2D translation: apparent velocity horizontal, and module inverselyproportionnal to the depth
Pure translation of the camera along the Z axis: C = 0
⇒ 2D divergence: zoom on the image
Pure rotation of the camera around the Z axis: Ω3 = 0
⇒ 2D rotation
Pure rotation of the camera around the X axis: Ω1 = 0
⇒ 2D translation
Elise Arnaud M2P UFR IMA

3D motion - Projected motion
Few exemples, fixed scene (no moving object)
Pure translation of the camera along the X axis: A = 0
⇒ 2D translation: apparent velocity horizontal, and module inverselyproportionnal to the depth
Pure translation of the camera along the Z axis: C = 0
⇒ 2D divergence: zoom on the image
Pure rotation of the camera around the Z axis: Ω3 = 0
⇒ 2D rotation
Pure rotation of the camera around the X axis: Ω1 = 0
⇒ 2D translation
Elise Arnaud M2P UFR IMA
3D motion - Projected motion
Few exemples, fixed scene (no moving object)
Pure translation of the camera along the X axis: A = 0
⇒ 2D translation: apparent velocity horizontal, and module inverselyproportionnal to the depth
Pure translation of the camera along the Z axis: C = 0
⇒ 2D divergence: zoom on the image
Pure rotation of the camera around the Z axis: Ω3 = 0
⇒ 2D rotation
Pure rotation of the camera around the X axis: Ω1 = 0
⇒ 2D translation
Elise Arnaud M2P UFR IMA
3D motion - Projected motion
Few exemples, fixed scene (no moving object)
Pure translation of the camera along the X axis: A = 0
⇒ 2D translation: apparent velocity horizontal, and module inverselyproportionnal to the depth
Pure translation of the camera along the Z axis: C = 0
⇒ 2D divergence: zoom on the image
Pure rotation of the camera around the Z axis: Ω3 = 0
⇒ 2D rotation
Pure rotation of the camera around the X axis: Ω1 = 0
⇒ 2D translation
Elise Arnaud M2P UFR IMA
Projected motion - apparent motion
projected motion : projection in the image plane of the 3Dmotion of visible elements in the scene
apparent motion : 2D motion ”seen” in an image sequencethanks to spatio-temporal variation of the luminance
famous example: rotation of a uniform sphere
Apparent motion = Projected motion !
Elise Arnaud M2P UFR IMA
Outline
Introduction
General framework: from 3D to 2D
Problems
Motion detection
Motion field estimation
Tracking
Elise Arnaud M2P UFR IMA
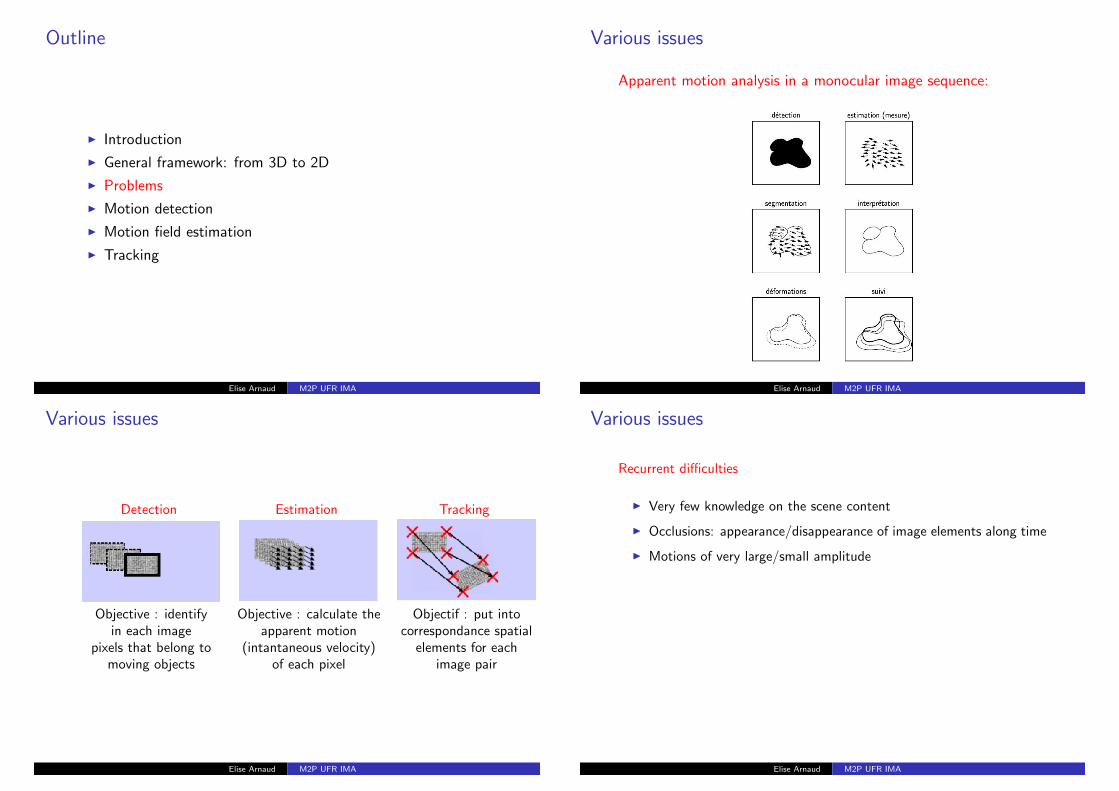
Various issues
Apparent motion analysis in a monocular image sequence:
Elise Arnaud M2P UFR IMA
Various issues
Detection Estimation Tracking
Objective : identify Objective : calculate the Objectif : put intoin each image apparent motion correspondance spatial
pixels that belong to (intantaneous velocity) elements for eachmoving objects of each pixel image pair
Elise Arnaud M2P UFR IMA
Various issues
Recurrent difficulties
Very few knowledge on the scene content
Occlusions: appearance/disappearance of image elements along time
Motions of very large/small amplitude
Assumption
1. Geometric / photometric invariants
interaction models data - unknows
2. Use of spatial / temporal context
a priori models on unknowns
Elise Arnaud M2P UFR IMA

Various issues
Recurrent difficulties
Very few knowledge on the scene content
Occlusions: appearance/disappearance of image elements along time
Motions of very large/small amplitude
Assumption
1. Geometric / photometric invariants
interaction models data - unknows
2. Use of spatial / temporal context
a priori models on unknowns
Elise Arnaud M2P UFR IMA
Outline
Introduction
General framework: from 3D to 2D
Problems
Motion detection
Motion field estimation
Tracking
Elise Arnaud M2P UFR IMA
Motion detection
goal: detect moving objects using a cameraProblem: distringuish changes in the image due to motion
Applications
road traffic control
surveillance
augmented reality
tracking
etc.
Elise Arnaud M2P UFR IMA
Motion detection
Assumptions
fixed camera
fixed illumination condition
⇒ significative changes only due to motion
no a priori knowledge on object dynamic
no a priori knowledge on object nature
What to solve ?
Detection of significative temporal changes of the luminancefunction.
Done by comparing successive images or by comparing with areference image
Elise Arnaud M2P UFR IMA

Motion detection
Assumptions
fixed camera
fixed illumination condition
⇒ significative changes only due to motion
no a priori knowledge on object dynamic
no a priori knowledge on object nature
What to solve ?
Detection of significative temporal changes of the luminancefunction.
Done by comparing successive images or by comparing with areference image
Elise Arnaud M2P UFR IMA
Motion detection
3 categories of changes
background hidden by the moving object
background made visible by the moving object
sliding of the object on it-self (pbl if uniform object)
Elise Arnaud M2P UFR IMA
Motion detection
Few naıve ideas ( but that may be efficient ...)
inter-image difference:
In each pixel s, threshold the inter-image difference
|I2(s)− I1(s)|?> threshold
yes means a significative change
Mean inter-image difference
Let us consider a window W(s) around s of size n× n
r∈W(s) |I2(r)− I1(r)|n× n
?> threshold
Elise Arnaud M2P UFR IMA
Motion detection
Few naıve ideas ( but that may be efficient ...)
inter-image difference:
In each pixel s, threshold the inter-image difference
|I2(s)− I1(s)|?> threshold
yes means a significative change
Mean inter-image difference
Let us consider a window W(s) around s of size n× n
r∈W(s) |I2(r)− I1(r)|n× n
?> threshold
Elise Arnaud M2P UFR IMA

Motion detection
Elise Arnaud M2P UFR IMA
Motion detection
Elise Arnaud M2P UFR IMA
Motion detection - classication of changes
Keep one mask of changes using logical operations
but difficulties due tonoise and uniform objects
Elise Arnaud M2P UFR IMA
Motion detection - results
Elise Arnaud M2P UFR IMA

Motion detection - applications
Elise Arnaud M2P UFR IMA
Outline
Introduction
General framework: from 3D to 2D
Problems
Motion detection
Motion field estimation
Tracking
Elise Arnaud M2P UFR IMA
Motion estimationDense estimation of the apparent motion field
apparent motion field = optical flow associate to each pixel s = (x, y) a motion vector
v(s) = (u, v) that represents its instantaneous apparentvelocity.
Study the variations of the luminance function I(x, y, t)
Elise Arnaud M2P UFR IMA
Motion estimation
Example of optical flow
Elise Arnaud M2P UFR IMA
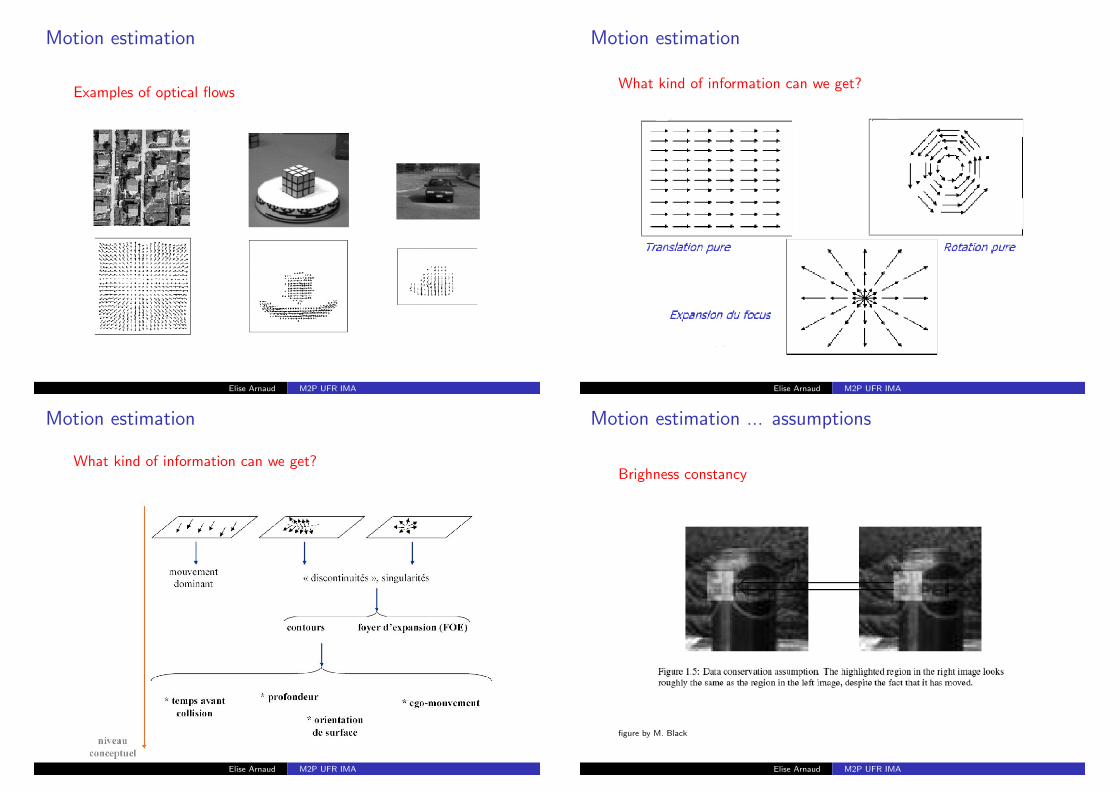
Motion estimation
Examples of optical flows
Elise Arnaud M2P UFR IMA
Motion estimation
What kind of information can we get?
Elise Arnaud M2P UFR IMA
Motion estimation
What kind of information can we get?
Elise Arnaud M2P UFR IMA
Motion estimation ... assumptions
Brighness constancy
figure by M. Black
Elise Arnaud M2P UFR IMA

Motion estimation ... assumptions
Spatial coherence
figure by M. Black
Elise Arnaud M2P UFR IMA
Motion estimation ... assumptions
To recover optical flow, we need some assumptions
Brightness constancy – In spite of motion, imagemeasurement in small region will remain the same
Spatial coherence – Assume nearby points belong to the samesurface, thus have similar motions, so estimated motionshould vary smoothly
Difficulties
illumination changes
occlusions
specularity, transparency
Elise Arnaud M2P UFR IMA
Motion estimation ... assumptions
To recover optical flow, we need some assumptions
Brightness constancy – In spite of motion, imagemeasurement in small region will remain the same
Spatial coherence – Assume nearby points belong to the samesurface, thus have similar motions, so estimated motionshould vary smoothly
Difficulties
illumination changes
occlusions
specularity, transparency
Elise Arnaud M2P UFR IMA
Motion estimation ... assumptions
To recover optical flow, we need some assumptions
Brightness constancy – In spite of motion, imagemeasurement in small region will remain the same
Spatial coherence – Assume nearby points belong to the samesurface, thus have similar motions, so estimated motionshould vary smoothly
Difficulties
illumination changes
occlusions
specularity, transparency
Elise Arnaud M2P UFR IMA

Motion estimation ... assumptions
To recover optical flow, we need some assumptions
Brightness constancy – In spite of motion, imagemeasurement in small region will remain the same
Spatial coherence – Assume nearby points belong to the samesurface, thus have similar motions, so estimated motionshould vary smoothly
Difficulties
illumination changes
occlusions
specularity, transparency
Elise Arnaud M2P UFR IMA
Motion estimation
+ contextual information
1. ∀s, I2(s+ v(s)) = I1(s)
⇒ Block-matching approaches
2. dI(x,y,t)dt = 0
⇒ Differential approaches
Elise Arnaud M2P UFR IMA
block-matching methods
W(s) is a window centered in s
Goal : Find v(s) that maximises the similarity between I1 inW(s) and I2 in W(s+ v(s))
Elise Arnaud M2P UFR IMA
block-matching methods
similarity measures
sum of absolute values
r∈W(s)
|I2(r + v)− I1(r)|
sum squared differences
r∈W(s)
(I2(r + v)− I1(r))2
correlation
r∈W(s)
I2(r + v).I1(r)
Elise Arnaud M2P UFR IMA

differential approaches
dI(x, y, t)
dt= 0
dI(x, y, t)
dt=
∂I
∂x
dx
dt+
∂I
∂y
dy
dt+
∂I
∂t= 0
∂I∂x ; ∂I
∂y : spatial image gradients: how image varies in x or ydirection for fixed time
∂I∂t : temporal image derivative: how image varies in time forfixed position
dxdt = u, dx
dt = v, temporal derivatives, i.e. velocitycomponents: rate of change in x and y
Elise Arnaud M2P UFR IMA
differential approaches
dI(x, y, t)
dt= 0
dI(x, y, t)
dt=
∂I
∂x
dx
dt+
∂I
∂y
dy
dt+
∂I
∂t= 0
∂I∂x ; ∂I
∂y : spatial image gradients: how image varies in x or ydirection for fixed time
∂I∂t : temporal image derivative: how image varies in time forfixed position
dxdt = u, dx
dt = v, temporal derivatives, i.e. velocitycomponents: rate of change in x and y
Elise Arnaud M2P UFR IMA
differential approaches
dI(x, y, t)
dt= 0
dI(x, y, t)
dt=
∂I
∂x
dx
dt+
∂I
∂y
dy
dt+
∂I
∂t= 0
∂I∂x ; ∂I
∂y : spatial image gradients: how image varies in x or ydirection for fixed time
∂I∂t : temporal image derivative: how image varies in time forfixed position
dxdt = u, dx
dt = v, temporal derivatives, i.e. velocitycomponents: rate of change in x and y
Elise Arnaud M2P UFR IMA
differential approaches
dI(x, y, t)
dt= 0
dI(x, y, t)
dt=
∂I
∂x
dx
dt+
∂I
∂y
dy
dt+
∂I
∂t= 0
∂I∂x ; ∂I
∂y : spatial image gradients: how image varies in x or ydirection for fixed time
∂I∂t : temporal image derivative: how image varies in time forfixed position
dxdt = u, dx
dt = v, temporal derivatives, i.e. velocitycomponents: rate of change in x and y
Elise Arnaud M2P UFR IMA

differential approaches
dI(x, y, t)
dt= 0
dI(x, y, t)
dt=
∂I
∂x
dx
dt+
∂I
∂y
dy
dt+
∂I
∂t= 0
∂I∂x ; ∂I
∂y : spatial image gradients: how image varies in x or ydirection for fixed time
∂I∂t : temporal image derivative: how image varies in time forfixed position
dxdt = u, dx
dt = v, temporal derivatives, i.e. velocitycomponents: rate of change in x and y
Elise Arnaud M2P UFR IMA
differential approaches
dI(x, y, t)
dt= 0
dI(x, y, t)
dt=
∂I
∂x
dx
dt+
∂I
∂y
dy
dt+
∂I
∂t= 0
rewritten as∂I
∂t+∇IT .v = 0
where v = (u, v) is the unknown velocity
Elise Arnaud M2P UFR IMA
differential approaches
∂I
∂t+∇IT .v = 0
where v = (u, v) is the unknown velocity
one equation, two unknowns .... infinitely many solutions !
Elise Arnaud M2P UFR IMA
differential approaches
∂I
∂t+∇IT .v = 0
where v = (u, v) is the unknow velocity
one equation, two unknowns .... infinitely many solutions !
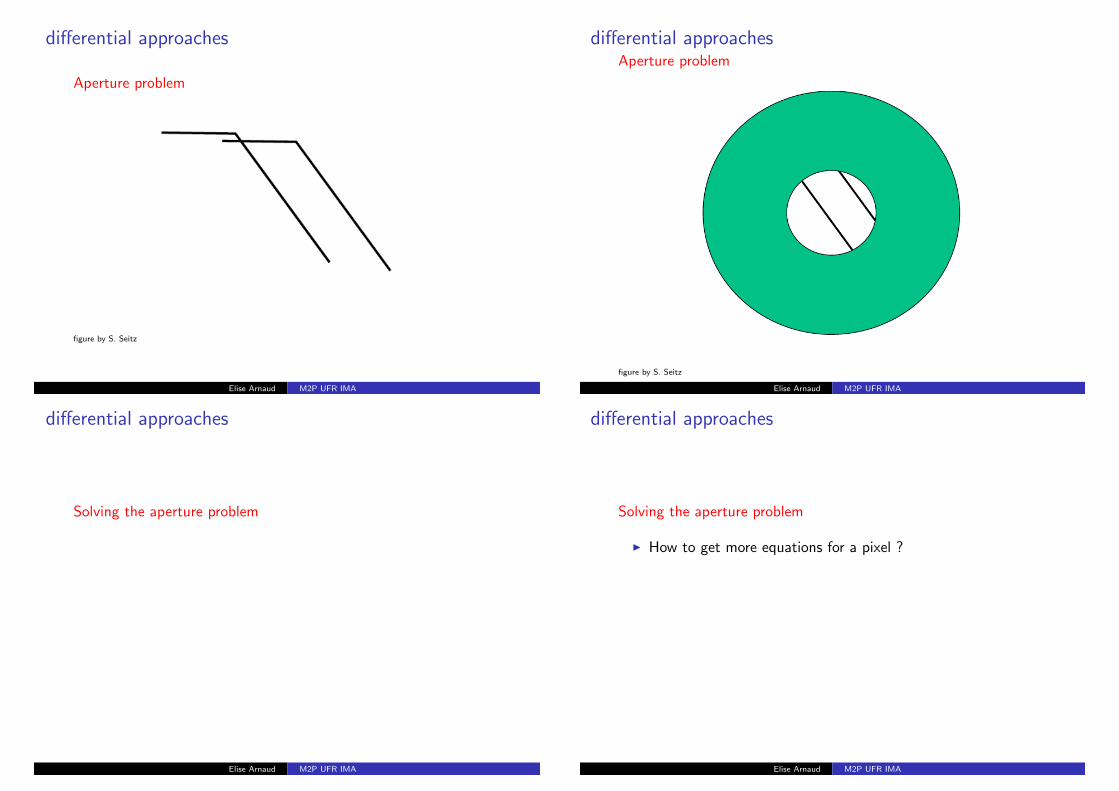
Aperture problem: We can only compute projection of thetrue flow vector in the direction of the image gradient that is,in the direction normal to the image edges
Flow component in gradient direction determined flow component parallel to edge unknown
Elise Arnaud M2P UFR IMA
differential approaches
Aperture problem
figure by S. Seitz
Elise Arnaud M2P UFR IMA
differential approachesAperture problem
figure by S. Seitz
Elise Arnaud M2P UFR IMA
differential approaches
Solving the aperture problem
How to get more equations for a pixel ?
Basic idea: impose additional constraints
Spatial coherence constraint: pretend the pixel’s neighborshave the same v = (u, v)
Lucas Kanade approach
Elise Arnaud M2P UFR IMA
differential approaches
Solving the aperture problem
How to get more equations for a pixel ?
Basic idea: impose additional constraints
Spatial coherence constraint: pretend the pixel’s neighborshave the same v = (u, v)
Lucas Kanade approach
Elise Arnaud M2P UFR IMA

differential approaches
Solving the aperture problem
How to get more equations for a pixel ?
Basic idea: impose additional constraints
Spatial coherence constraint: pretend the pixel’s neighborshave the same v = (u, v)
Lucas Kanade approach
Elise Arnaud M2P UFR IMA
differential approaches
Solving the aperture problem
How to get more equations for a pixel ?
Basic idea: impose additional constraints
Spatial coherence constraint: pretend the pixel’s neighborshave the same v = (u, v)
Lucas Kanade approach
Elise Arnaud M2P UFR IMA
differential approachesSolving the aperture problem - Lucas Kanade approach
Spatial coherence constraint: pretend the pixel’s neighborshave the same (u, v)
If we use a 5× 5 window, that gives us 25 equation per pixels
∂I
∂t+∇IT .[u v] = 0
Ix(p1) Iy(p1)Ix(p2) Iy(p2)
......
Ix(p25) Iy(p25)
uv
= −
It(p1)It(p2)
...It(p25)
B. Lucas and T. Kanade. An iterative image registration technique with an application to stereo vision. In
Proceedings of the International Joint Conference on Artificial Intelligence, pp. 674-679, 1981.
Elise Arnaud M2P UFR IMA
differential approachesSolving the aperture problem - Lucas Kanade approach
least squares problem
Ix(p1) Iy(p1)Ix(p2) Iy(p2)
......
Ix(p25) Iy(p25)
uv
= −
It(p1)It(p2)
...It(p25)
⇔ A
25×2
v = b25×1
Minimum least squares solution given by solution of
ATA 2×2
v = AT b2×1
Elise Arnaud M2P UFR IMA

differential approaches
Solving the aperture problem - Lucas Kanade approach
ATA 2×2
v = AT b2×1
IxIx
IxIy
IyIx
IyIy
uv
= −
IxItIyIt
The summations are over all pixels in the K ×K window When is this solvable
ATA should be invertible ATA should be well-conditioned ATA is equal to matrix M in the Harris detector ...
Elise Arnaud M2P UFR IMA
differential approaches
Solving the aperture problem - Lucas Kanade approach
M = ATA
The eigenvectors and eigenvalues of M relate to edgedirection and magnitude.
The eigenvector associated with the larger eigenvalue pointsin the direction of fastest intensity change.
The other eigenvector is orthogonal to it
Elise Arnaud M2P UFR IMA
differential approaches
Solving the aperture problem - Lucas Kanade approach
1. Estimate at each pixel using one iteration of Lucas andKanade estimation.
2. Warp one image toward the other using the estimated flowfield. (Easier said than done)
3. Refine estimate by repeating the process.
method that can not be applied to all points ... how to get adense map ?
computationally expensive
Elise Arnaud M2P UFR IMA
differential approachesSolving the aperture problem
How to get more equations for a pixel ?
Basic idea: impose additional constraints
most common is to assume that the flow field is smoothlocally
Ex. Look for v that minimizes:
x
∂I
∂t(x) +∇IT (x).v(x)
2
Brightness constency
+λ||∇u(x)||2 + ||∇v(x)||2
Spatial coherence
B.K.P. Horn and B.G. Schunck, ”Determining optical flow.” Artificial Intelligence, vol 17, pp 185-203, 1981.
Elise Arnaud M2P UFR IMA

differential approachesone additional ingredient
differential approaches are based on linearization valid only for small displacement ... so how can we do if we have large displacement ? multi-scale approach
Elise Arnaud M2P UFR IMA
differential approachesone additional ingredient
Elise Arnaud M2P UFR IMA
Optical flow - example of applications
Calculation of various depth layers in the image
Elise Arnaud M2P UFR IMA
Optical flow - example of applications
Mosaicking
Elise Arnaud M2P UFR IMA
Optical flow - example of applications
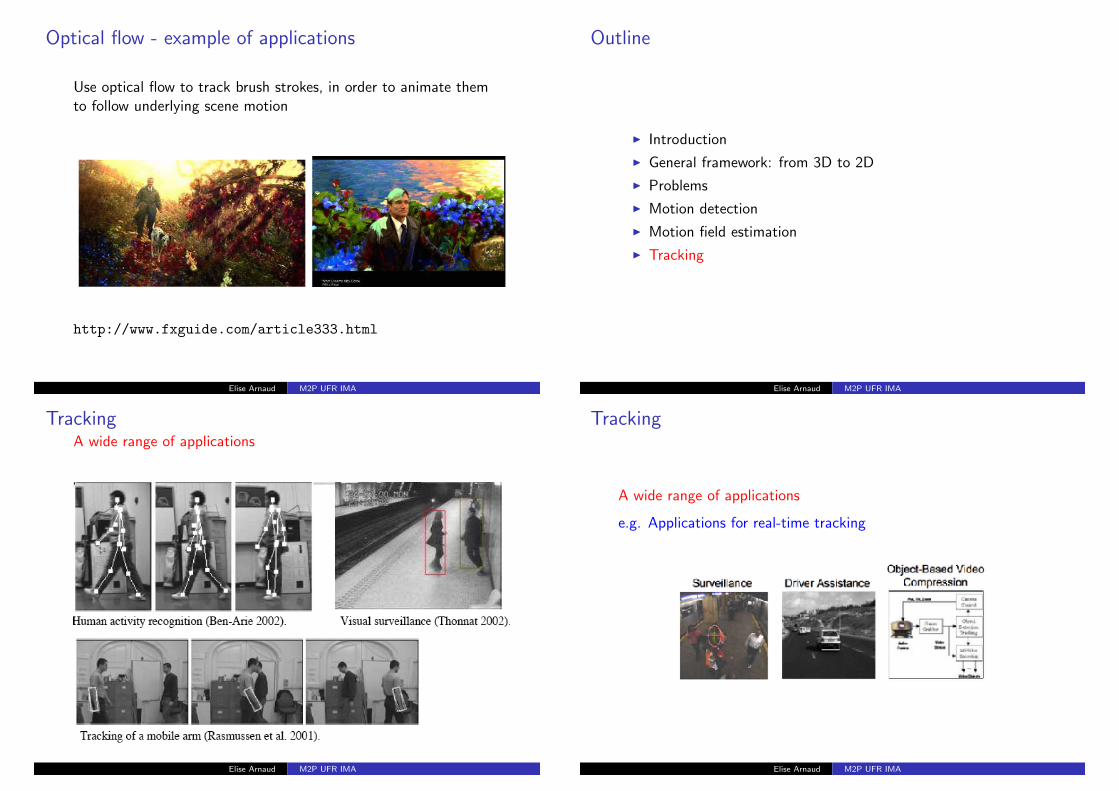
Use optical flow to track brush strokes, in order to animate themto follow underlying scene motion
http://www.fxguide.com/article333.html
Elise Arnaud M2P UFR IMA
Outline
Introduction
General framework: from 3D to 2D
Problems
Motion detection
Motion field estimation
Tracking
Elise Arnaud M2P UFR IMA
TrackingA wide range of applications
Elise Arnaud M2P UFR IMA
Tracking
A wide range of applications
e.g. Applications for real-time tracking
Elise Arnaud M2P UFR IMA
Tracking - difficulties
Elise Arnaud M2P UFR IMA
Tracking
Elise Arnaud M2P UFR IMA
Tracking
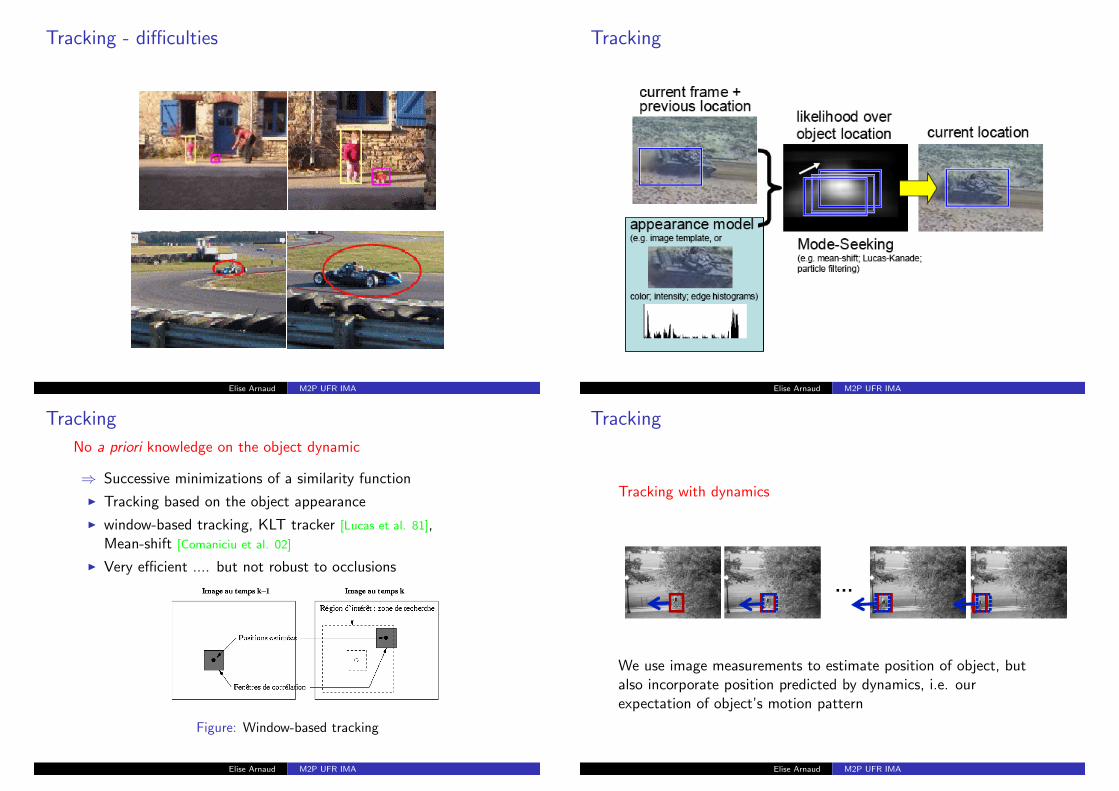
No a priori knowledge on the object dynamic
⇒ Successive minimizations of a similarity function
Tracking based on the object appearance
window-based tracking, KLT tracker [Lucas et al. 81],Mean-shift [Comaniciu et al. 02]
Very efficient .... but not robust to occlusions
Figure: Window-based tracking
Elise Arnaud M2P UFR IMA
Tracking
Tracking with dynamics
We use image measurements to estimate position of object, butalso incorporate position predicted by dynamics, i.e. ourexpectation of object’s motion pattern
Elise Arnaud M2P UFR IMA

Tracking with dynamics
Have a model of expected motion
Given that, predict where objects will occur in next frame,even before seeing the image
Intents do less work looking for the object: restrict search improve estimates since measurement noise tempered by
trajectory smoothness be robust to occlusions
Elise Arnaud M2P UFR IMA
Tracking with dynamics
Have a model of expected motion
Given that, predict where objects will occur in next frame,even before seeing the image
Intents do less work looking for the object: restrict search improve estimates since measurement noise tempered by
trajectory smoothness be robust to occlusions
Elise Arnaud M2P UFR IMA
Tracking with dynamics - general assumptions
Expect motion to be continuous, so we can predict onprevious trajectories
camera is not moving instantly from viewpoint to viewpoint objects do not disappear and reappear in different places in the
scene gradual change in pose between camera and scene
able to model the motion
Bayesian filter
Elise Arnaud M2P UFR IMA