osnovne karakteristike projektovanja savremenih ... zivkovic, jasmina... · integralnom razvoju...
TRANSCRIPT

Informacione tehnologije, obrazovanje i preduzetništvo ITOP17
405
UDK: 004.42 Stručni rad
OSNOVNE KARAKTERISTIKE PROJEKTOVANJA SAVREMENIH MEHATRONIČKIH SISTEMA
BASIC CHARACTERISTICS OF DESIGNING MODERN
MECHATRONIC SYSTEMS
Milutin Živković1, Jasmina Miljojković2,Zvonko Petrović1, Marina Karić1
1Visoka tehnička mašinska škola strukovnih studija u Trsteniku 2Fakultet inženjerskih nauka u Kragujevcu
[email protected],[email protected], [email protected] 2jasmina.miljojković@mfkg.rs
Rezime:Mehatroničko projektovanje je proces simultanog rešavnja različitih radnih
zadataka. Kod klasičnog pristupa projektovanju (konstruisanje i upravljanje) uređaja
(mašine/sistema), isto se razvija fazno i gotovo nezavisno jedna od druge. Zato se
mehatroničkim pristupom moguće greške, u početnoj fazi, mogu eliminisati fazno.
Ovakav način razmišljanja podrazumeva iterativni postupak analize,gde se prvo napravi
inicijalni dizajn a on se onda razvija ispravljanjem uočenih nedostataka. Da bi se dizajn
poboljšao treba razvijati sve delove mašine tako da rade “skladno”, što postižemo sa
paralelnim razvojem. Iz tih razloga autori predstavljaju „V“ model razvoja korišćenjem
hijerahiskog modela. Analizom njegovih osobina i prednosti blok dijagramom je
predstavljen model kontrole sa mogućnošću podešavanja izlaznih parametara.
Ključne reči:mehatronika, projektovanje, dizajn, iterativni postupak, kontrola.
Abstract: Mechatronic design is the process of simultaneous addressing different
operating tasks. In the traditional approach to designing a device (machine/system),
construction and control are developed in phases and almost independent in respect to
each other. Thus, the possible errors in the initial phase can be eliminated in phases by
means of the mechatronic approach. This type of understanding includes iterative
procedure of analysis where initial design is made first and then it develops by correcting defects identified. To upgrade the design, it is necessary to develop all parts of the machine so that they work ’’in harmony’’, which is achieved by parallel development. Therefore, the author’s introduces V model of development by means of the hierarchical model. After analyzing its properties and advantages, the model of control with the possibility to adjust output parameters is presented in a block diagram. Key words: mechatronics, design, iterative procedure, control. 1. UVOD U radu je objašnjen postupak projektovanja mehatroničkih sistema kao i koje prednosti se ogledaju ovakvim pristupom. Međutim, realizacija ovakvih sistema zahteva i neke
Informacione tehnologije, obrazovanje i preduzetništvo ITOP17
406
preduslove.To je dobro poznavanje fundamentalnih nauka: mehanike i matematike ali i mašinskih materijala, mašinskih elemenata, otpornosti materijala, tehničkog crtanja, elektrotehnike, proizvodnih tehnologija, menadžmenta i upravljanja procesima. Sva ovo, ustvari, su predmeti koji se uče na svim Mašinskim fakultetima i Visokim tehničkim školama. Mehatronika predstavlja spoj mašinstva i elektrotehnike, podržana od strane informacionih tehnologija, [1,2,3]. Njihovom kombinacijom literaturni podaci, vlastito iskustvo i primeri iz prakse, pokazuju da je moguća realizaciju bilo kakvog tehničkog problema (zadatka). U radu se navode osnovne definicije mehatroničkog pristupa integralnom razvoju mašina (proizvoda) ili usluga kao i preporuke za izbor načina kontrole i upravljanja kontrolnim parametrima. Za projektovanje i upravljanja savremenim mehatronskim sistemima, vlastito iskustvo i literaturni podaci pokazuju, potrebna su multidisciplinarna znanja i veštine.Projektant korišćenjem gotovih softverskih alata, za modeliranje komponenatai njihove integracije u sistema, modelira i simulira njegov rad, vrši testiranje i verifikacija postavljenog modela. U radu se analizira savremeni način projektovanja korišćenjem „V“ – modela. Modelom R. Isermanna [4] prikazan je razvoj savremenih metoda projektovanja šematski, kroz određeni broj koraka. On podrazumeva primenu metoda modeliranje i simulaciju komponenti sistema, izradu virtuelnih prototipova sistema, njihovo testiranje i podešavanje parametara sistema, analizu signala, kreiranje algoritama, programiranje i testiranje pouzdanosti sistema.Za teorijsko i fizičko modeliranje, i simulaciju raznih heterogenih komponeti mogu se koristiti softverski alati: DYMOLA, MODELICA, MOBILE, VHDL-AMS, MATLAB/SIMULINK, itd.
2. KARAKTERISTIKE SAVREMENIH MEHATRONIČKIH SISTEMA
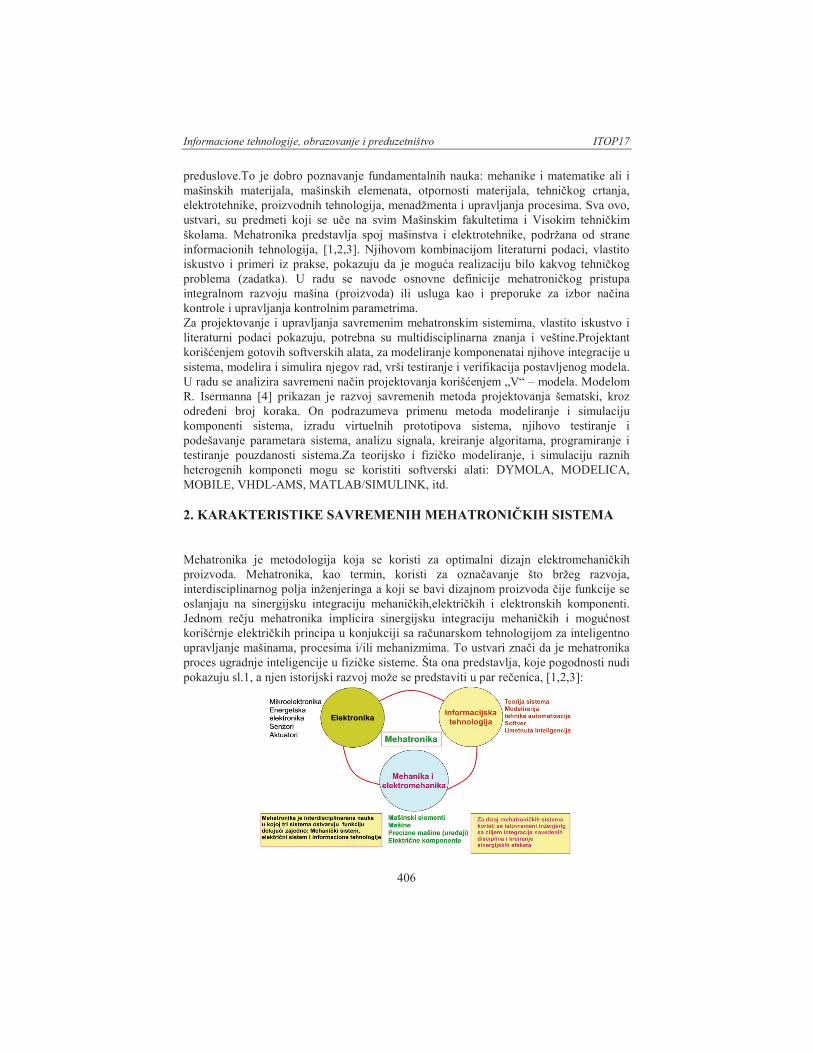
Mehatronika je metodologija koja se koristi za optimalni dizajn elektromehaničkih proizvoda. Mehatronika, kao termin, koristi za označavanje što bržeg razvoja, interdisciplinarnog polja inženjeringa a koji se bavi dizajnom proizvoda čije funkcije se oslanjaju na sinergijsku integraciju mehaničkih,električkih i elektronskih komponenti. Jednom rečju mehatronika implicira sinergijsku integraciju mehaničkih i mogućnost korišćrnje električkih principa u konjukciji sa računarskom tehnologijom za inteligentno upravljanje mašinama, procesima i/ili mehanizmima. To ustvari znači da je mehatronika proces ugradnje inteligencije u fizičke sisteme. Šta ona predstavlja, koje pogodnosti nudi pokazuju sl.1, a njen istorijski razvoj može se predstaviti u par rečenica, [1,2,3]:
Informacione tehnologije, obrazovanje i preduzetništvo ITOP17
407
Slika 1.Šta je mehatrnički sistem i šta on prestavlja?
· U početku ona je zamišljena kao sredstvo koje dopunjuje mehaničke komponente
elektroničnim u preciznoj mehanici(kamera je bila tipičan mehatronički uređaj).
· U Europi su se mehatronički koncepti značajno počeli primenjivati kasnih 80-tih
prošlog veka.
· U Americi su bili pomalo rezervirani prema ovom terminu, pa se umesto
mehatronika koristio izraz sistemski inženjering.
Danas je postignut konsenzus oko toga šta je mehatronika i šta ona u suštini znači! Pod
terminom mehatronika podrazumeva se poboljšanje funkcionalnosti tehničkih proizvoda
i sistema spajanjem svih komponenti u jednu celinu. Razliku klasičnog i mehatroničkog
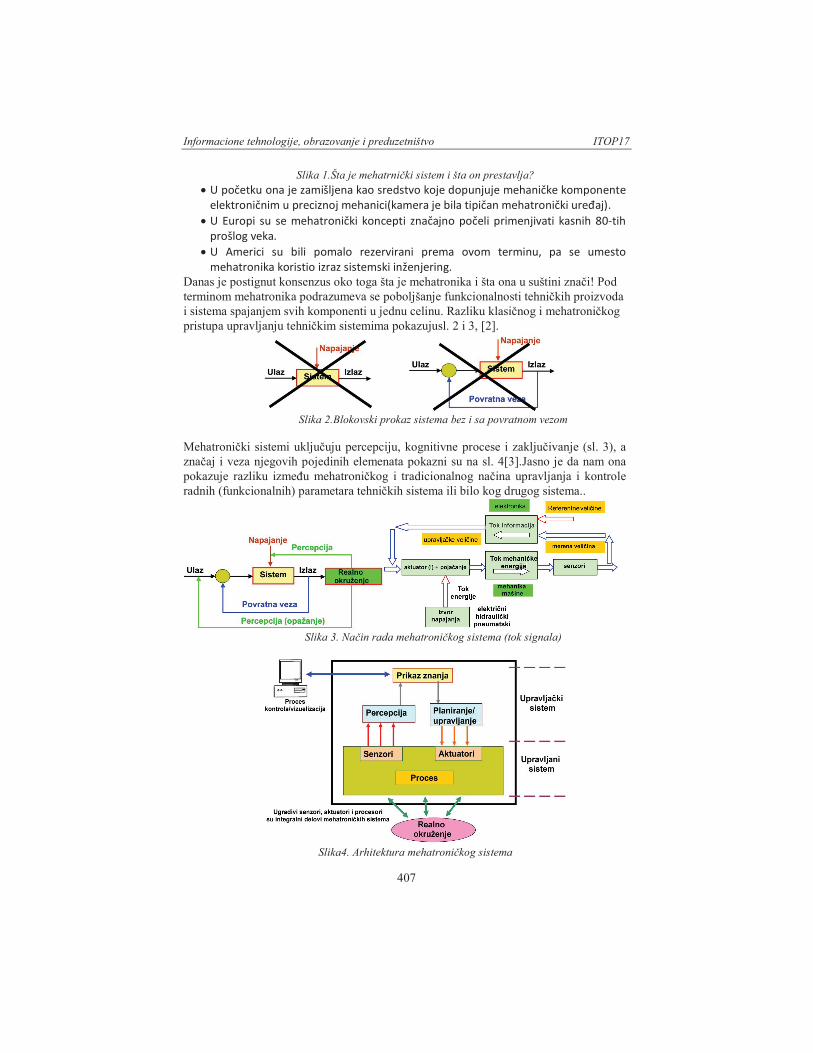
pristupa upravljanju tehničkim sistemima pokazujusl. 2 i 3, [2].
Slika 2.Blokovski prokaz sistema bez i sa povratnom vezom
Mehatronički sistemi uključuju percepciju, kognitivne procese i zaključivanje (sl. 3), a
značaj i veza njegovih pojedinih elemenata pokazni su na sl. 4[3].Jasno je da nam ona
pokazuje razliku između mehatroničkog i tradicionalnog načina upravljanja i kontrole
radnih (funkcionalnih) parametara tehničkih sistema ili bilo kog drugog sistema..
Slika 3. Način rada mehatroničkog sistema (tok signala)
Slika4. Arhitektura mehatroničkog sistema

Informacione tehnologije, obrazovanje i preduzetništvo ITOP17
408
Proces hijerarhiskog načina ponašanja i analize stanja bilo kog tehničkog sistema
pokazan je u obliku šest blokovskih celina, što pokazuje sl.5, [1,2,3].
Slika 5. Procesna analiza ponašanja/dijagnostike stanja tehničkog sistema
Osobine mehatroničkih sistema i proizvoda: · Funkcionalno među delovanje između mehaničkih, elektroničkih i informatičkih
tehnologija.
· Prostorno povezivanje podsistema u funkcionalnu celinu; njihova inteligencija
povezana je sa upravljačkom funkcijom mehatroničkog sistema.
· Prilagodljivost, pogodnost uz koju je moguće mehatroničke proizvode prilagoditi
promenljivim zadacima i situacijama.
· Višefunkcionalnost koja se odnosi na funkcije mikroprocesora određene
ugrađenim kompjuterskim programom.
· Nevidljive funkcije koje obavlja mikroelektronika, teško vidljive i razumljive za
potrošače/korisnike.
· Tehnološka međuzavisnost, povezana sa dostupnim proizvodnim tehnologijama.
Distribucija mehaničkih i elektroničkih funkcija:
· Decentralizirani električki pogoni sa mikroračunarskim upravljanjem (npr.:višeosni
obradni sistemi,automatski zupčanici, itd.).
· Elastične (lagane) konstrukcije: prigušenje sa elektonskom/ektroničnom povratom
vezom (pogon niza povezanih tehničkih sistema, elastični roboti, savremene
svemirske konstrukcije, itd.).
· Ukupno linearno ponašanjene linearnih mehanizama pomoću odgovarajuće
povratne veze (hidraulički i pneumatski aktuatori, ventili, itd.).
· Adaptacije operatorakroz programibilne karakteristike (automatska regulacija
pedala gasa – kod savremenih pogona hidrauličkih pumpi, manipulatori, itd.).
Operacijska svojstva – proces prilagođavanja ponašanja pomoću sistema upravljanja sa
povratnom vezom. To nam omogućije da se:
· Povećava mehanička preciznost (uvođenjem povratne veze).
· Omogući adaptivna kompenzacija postojanja trenja.
· Modelsko i adaptivno upravljanje: omogućuje širok opseg operacija (upravljanje
protokom, silom i brzinom, raznih pogonskih motora, vozila, letelica,
itd.).Ostvarivanje izrazito zahtevnih upravljačkih performansi, zbog usko (blisko)
postavljene (referentne) veličine sa funcionalnim ograničenjima (motori, turbine,
proizvodne linije za proizvodnju papira, itd.).
Nove funkcije – one nebi bile moguće bez ugradivih miktoprocesora i odgovarajućih
upravljačkih algoritama i senzora:
· Upravljanje fizički nemerljivim promenljivima (klizanje točka na zaleđenom putu,
unutrašnje naprezanje i temperatura metalne strukture, parametri prigušenja,
ugao i brzina proklizavanja vozila, itd.).

Informacione tehnologije, obrazovanje i preduzetništvo ITOP17
409
· Korišćenje naprednih tehnologija za praćenja stanja i dijagnostiku kvara uređaja,
sistema ili proizvodne linije.
· Na kvarove tolerantni sistemisa hardverskom i analitičkom redudancijom.
· Mogućnost pružanja daljinskih usluga za potrebe nadzora, održavanja, itd.
· Fleksibilna adaptacijaza menjanje graničnih uslova.
· Programibilne funkcije omogućuju promene tokom dizajna kao i nakon isporuke. Integracijske forme:
· Sa poboljašnjem minijaturizacije, povećanjem robusnosti i računarske moći mikro -
elektroničkih komponenti postavljaju se novi zahtevi u pogledu integracije.
· Takođe, uvođenje bežičnog prenosa signala uvode se nove mogućnosti u
mehatroničke sisteme.
· Integracija unutar mehatroničkog sistema se obavlja na dva načina: integracija
komponenti i integracija informacijskog procesiranja.
· Integracija komponenti (hardverska integracija) ima za rezultat hardverski dizajn
celokupnog mehatroničkog sistema i ugradnjom senzora, aktuatora i
mikroračunara u mehanički proces.
· Prostorna integracija je određena procesom, senzorima i aktuatorima.
· Integracijom mikroračunara i senzora dobijaju se inteligentni (smart) senzori, a
integracijom mikroračunara i aktuatora inteligentni (smart) aktuatori.
Integracija korištenjem informacijskog procesiranja (softverska integracija) se zasniva
na naprednim upravljačkim funkcijama. Osim standardnog direktnog upravljanja i
upravljanja u povratnoj vezi (sl. 2) (niža klasa obrade signala) dodatna obrada signala se
zahteva u procesima zasnovanim na znanju kao i on line (real time) procesiranju
informacija (viši zahtevi koji se odnose na brzinu obrade signala), sl. 3.
· On line obrada podataka uključuje i mogućnost rešavanje problema tipa
nadzora, sa mogućnošću dijagnostikovanjem kvarova, optimizacije i rukovanja
procesom.
· Procesi svojstveni bazi znanja se mogu sitematizovati kao/na : napredna obrada
informacija, metode dizajniranja, matematički modeli procesa i kriterijijumi
performansi.
· Na osnovu ovih procesa omogućuje se ukorporiranje znanja u elektronske i
mehaničke komponente korištenjem softvera.
3. PROJEKTOVANJA MEHATRONIČKOG SISTEMA POMOĆU „V“MODELA
Dizajn mehatroničkih sistema podrazumeva sistemski razvoj i obavezujuće korišćenje
savremenih softverskih dizajnerskih alata.
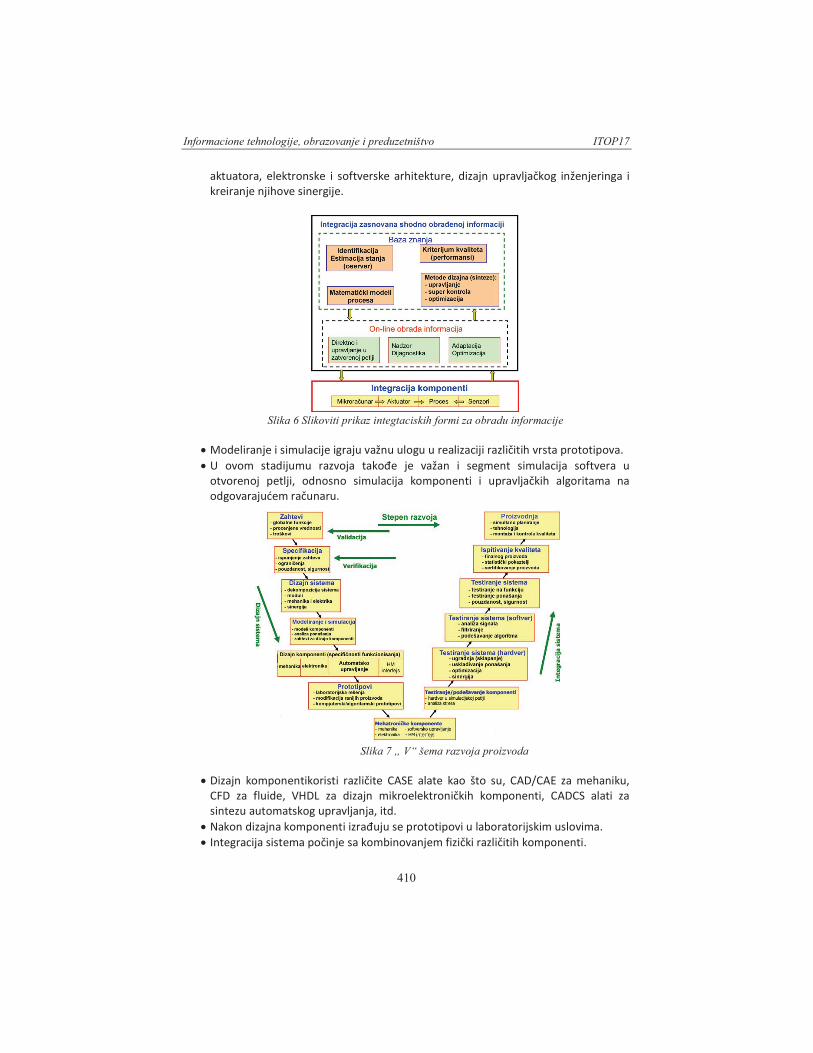
· Mehatronički dizajn predstavlja iterativnu proceduru, sl. 6, [2,3].
· “V” šema razvoja mehatroničkih sistema se koristi za dizajn, integraciju, validaciju,
testiranje i evoluciju mehatroničkih sistema, sl. 7, [3,4].
· Dizajn sistema uključuje distribuciju zadataka između mehaničkih, hidrauličkih,
pneumatskih, električkih i elektronskih komponenti, vrste i razmeštaj senzora i
Informacione tehnologije, obrazovanje i preduzetništvo ITOP17
410
aktuatora, elektronske i softverske arhitekture, dizajn upravljačkog inženjeringa i
kreiranje njihove sinergije.
Slika 6 Slikoviti prikaz integtaciskih formi za obradu informacije
· Modeliranje i simulacije igraju važnu ulogu u realizaciji različitih vrsta prototipova.
· U ovom stadijumu razvoja takođe je važan i segment simulacija softvera u
otvorenoj petlji, odnosno simulacija komponenti i upravljačkih algoritama na
odgovarajućem računaru.
Slika 7 „ V“ šema razvoja proizvoda
· Dizajn komponentikoristi različite CASE alate kao što su, CAD/CAE za mehaniku,
CFD za fluide, VHDL za dizajn mikroelektroničkih komponenti, CADCS alati za
sintezu automatskog upravljanja, itd.
· Nakon dizajna komponenti izrađuju se prototipovi u laboratorijskim uslovima.
· Integracija sistema počinje sa kombinovanjem fizički različitih komponenti.

Informacione tehnologije, obrazovanje i preduzetništvo ITOP17
411
· Zbog različitog razvojnog statusa komponeti tokom simulacijskog dizajna,
minimizacije i iterativnih razvojnih ciklusa kao i predviđenog vremenskog trajanja
razvoja sistema, potrebno je koristiti različite real time simulacije.
· Jedna od vrsta real time simulacija je RCP, brzi razvoj upravljačkog prototipa
(Rapid Control Prototyping) gde se realni proces egzistira zajedno sa simulacijskim
upravljanjem, sve to zahvaljujući visokobrzinskom hardveru i gotovim softverskim
rešenjima.
· Druga vrsta real time simulacije je HIL hardver u simulacijskoj petlji (Hardware in
the Loop simulation), gde se real time simulacijski proces pokreće zajedno sa
realnim ECU (Electronic Control Unit) hardverom. Ovo predstavlja zahtevan
zadatak jer sam proces real time simulacije mora biti jako precizna i izlazi
senzora se moraju izvesti sa specijalnim povratnim vezama.
· Integracija sistema obuhvata prostornu integraciju hardverskih komponenti, kao i
ugradnjom senzora aktuatora, aktuatora, kablova i sabirnica u mehanički sistem i
kreiranje sinergijskih efekata i funkcionalne integracije korištenjem softvera sa
algoritmima za upravljanje, nadzor, dijagnostikovanje kvarova, tolerancija
odstupanja dijagnostičkih parametara i HMI operacije.
4. UPRAVLJANJE MEHATRONIČKIM SISTEMIMA Primena algoritama upravljanja tehničkim sistemima, sa direktnom granom i granom povratne veze, principski zavise od svojstava i karakteristika sastavnih uređaja sistema: električnih, mehaničkih, hidrauličkih, pneumatskih kao i toplotnih stanja sistema. Svi oni se matematički mogu predstaviti shodno znanju iz matematičkog modeliranja sistema. Upravljačka struktura se sastoji od:baze znanja,sistema upravljanjasa povratnim vezama. Baza znanja obuhvata: matematičke modele procesa,algoritme identifikacije i estimacije parametara,metode sinteze regulatora kao i kriterijume upravljačkih performansi.Sistemi upravljanja se sastoje od niskobrzinskih regulatora (spori procesi) i regulatora visoke brzine reagovanja, modula za generisanje referentne vrednosti i mogućnosti adaptacije parametara regulatora, što i pokazuje sl. 8, [2,3].
Slika8 Upravljanje mehatroničkim sistemima

Informacione tehnologije, obrazovanje i preduzetništvo ITOP17
412
Sinteza mehatroničkog sistema upravljanja je ograničenasa mogućnošću računarske
podrške, real time zahtevima, nelinearnošću procesa, ograničenom brzinom i radnim opsegom aktuatora, njegovom robusnošću, transparentnošću rešenja, održavanjem, itd. Najvažnija svojstvo mehatroničkog sistema je istovremeni (paralelni) dizajn samog mehatroničkog procesa i upravljanja.To znači da statičko i dinamičko ponašanje procesa, tip i pozicija aktuatora i senzora u sistemu, dizajniraju se naodgovarajući način a sve to rezultira u CDF (Control Dynamic Friendly) ukupnom ponašanju. Cilj upravljanja „sporim procesima“ obezbeđuje sigurno dinamičko ponašanje sa kompenzacijom nelinearnosti tipa trenja, smanjenje osetljivosti parametara stanja sistema i stabilizaciju istih. Tipični primeri ovog načina upravljanja su: prigušenje visokofrekvencijskih oscilacija, kompenzacija nelinearnih statičkih karakteristika, kompenzacija uticaja trenja, stabilizacija, prekidno upravljanje aktuatorom, itd. Zadatak regulatora više brzine reagovanja (brzi procesi)je da proizvede dobro ukupno dinamičko ponašanje s obzirom na promene referentne pozicije i moguće kompenzacije delovanja spoljnih poremećaja, npr. promena mase tereta. Regulator brzih procesa (brzine reagovanja) može se realizovati kao parametarski optimizirani PID regulator, modelski zasnovan regulator ili regulator u prostoru stanja sa ili bez observera stanja. Tipični zadaci visobrzinskog regulatora uključuju: predviđanj/praćenje parametara zasnovanih na merenja i parametarsku sinteza adaptivnih sistema upravljanja. Važno je i navesti da mehatronički sistemi koriste široki paletu za izbor regulatora, počevši od jednostavnih proporcionalnih do inteligentnih adaptivnih regulatora.Važne karakteristika sistema upravljanja su i mogućnosti stalnog nadzora i detektovanja kvarova i kao i sama mogućnost samodijagnostike stanaja. 5. ZAKLJUČAK
Na osnovu navedenog zaključuje se da,u odnosu na klasičan projektni pristup problemu,
mehatronički pristup doprinosi značajnim prednostima. Sve to semože pripisati„V“
pristupu i tzv. analizi metodom korak po korak. Specifičnost se odnosi na virtualnoj
analizu mehaničkih i električnih ograničenja i njihovoj integraciji u jedinstven tehnički
sistem. Primena savremenih softverskih paketa omogućuje brz i siguran put kao i
mogućnost razvoj novih komponenti/sistema mehatroničkim modelom.Savremeni
automobilisu pravi primeri mehatroničkih sistema, zahvaljujući udobnosti i svemu onom
što oni korisniku pružaju. Dobro su nam poznate i primena kod robotskih sistema:
telemedicina/telehirurgija,mikrohirurgija,čovekoliki roboti, potpuno automatizovana
proizvodnja, bespilotne letelice i mobilna vozila,svemirska istraživanja, ...Buduće
pravce razvoja mehatronike možemo potražiti u: biomehatronici, mikromehatronci,
optomehatronici, medicinskoj mehatronici, vojnoj mehatronici, ...
6. LITERATURA [1] W. Bolton, Mechatronics: Elektronics control systems in mechanical and elektrical
enginering,2002., (prevedeno izdanje izdato na Tehničkom fakultetu u Čačku) autora D. Golubović,M. živkovićI. Milićević, O.Robajec: ISBN 013112633)
[2] D.G. Alciatore and M.B. Histand, Introduction to Mechatronics and Measurement Systems, New York, New York: McGraw-Hill, 2003.,

Informacione tehnologije, obrazovanje i preduzetništvo ITOP17
413
[3] D.A.Bradley,D. Dawson, N.C. Burd and A.J. Loader,Mechatronics: Elektronics in
products and processes, Chapman and hall, 2 – 6 Boundary Lane, London SE1 8HN
(ISBN 0 – 412 – 34200 – 6), 2006.,
[4] Isermann, R. (2007). Mechatronic systems: Innovative products with embedded
control, Control Engineering Practice, doi:10.1016/j.conengprac.2007.03.010.

Informacione tehnologije, obrazovanje i preduzetništvo ITOP17
414