optimum local decision space partitioning for distributed detection
TRANSCRIPT

Optimum Local Decision Space Partitioning for Distributed Detection
C. C. L@ Senior Member, IEEE
J. J. CHAO Northwestem University
We consider a distributed detection system which consists
of a number of independent local detectors and a fusion center.
The decision statistics and performance characteristics (Le.,
the false alarm probabilities and detection probabilities) of the
local detectors are assumed given Communication is assumed
only between each local detector and the fusion center and is
one-way from the former to the latter. The fusion center receives
decisiom €rom the local detectors and combines them for a global
decision Instead of a one-bit hard decision, we propose that
each local detector provides the fusion center with multiple-bit
decision which represents its decision and, conceptually, its
degree of confidence on that decision Generating a multiple-bit
local decision entails a subpartitioning of the local decision
space, whose optimization is studied. We show that the proposed
system significantly outperform the one in which each local
detector provides only a hard decision We also show that,
based on optimum subpartitioning of local decision space, the
detection performance increases monotonically with the number
of partitions.
Manuscript received October 5, 1987.
IEEE Log No. 28654.
This work was supported in part by Recon Optical, Inc.
Authors’ current addresses: C. C. Lee, Dep’t. of Electrical Engineering and Computer Science, Northwestern University, Evanston, IL 60208; J. J. Chao, Dep’t. of Electronic Engineering, National College of Marine Science and lkchnology, Keelung, Diwan.
~
536 IEEE TRANSACTIONS ON AEROSPACE AND ELECTRONIC SYSTEMS VOL. 25. NO. 4 JULY 1989
0018-9251/89/0700-0536 $1.00 @ 1989 IEEE
I. INTRODUCTION
Distributed detection systems have received increasing attention over the past several years. These systems generally have the advantages of higher reliability, survivability, and shorter decision time than centralized systems [l-31. We consider a two-level distributed detection system which consists of a number of local detectors and a decision fusion center as shown in Fig. 1. Each local detector performs the same detection task independently based on its own local observations. The local decisions are then transmitted to the fusion center where a global decision (i.e., final decision) is made. No communications between the local detectors are assumed. As far as the complexity of local decisions are concerned, there is a tradeoff between communication costs and detection performance. Theoretically, optimum detection performance can be achieved if every local detector computes the likelihood ratio and transmits its exact value to the fusion center. Then, since all these likelihood ratios are independent, the global likelihood ratio is the product of these local likelihood ratios. However, this is at the expense of an excessive bandwidth. In addition, using detailed local information in the decision fusion would reduce the failsafe property of distributed decision systems. This is because a jammed or malfunctioned local detector may offer a “wrong” likelihood ratio which dominates the global likelihood ratio. As a result, distributed detection has been in most studies [la] treated as having each local detector transmit to the fusion center a one-bit hard decision regarding the existence of a signal. Based on this treatment, the problem of distributed detection has been studied extensively. The global optimization criterion for a distributed detection system would encompass local decision statistics, local decision thresholds, the fusion center decision statistic, and the fusion center decision threshold. It has been shown [l-31 that likelihood ratios are the optimum decision statistics throughout the system but that optimum decision thresholds are “coupled” and are very difficult, if not impossible, to determine [1-6]. In their pioneering work, Tenney and Sandell [l] extended the classical detection theory to a two-sensor two-hypothesis test. The optimum strategy that minimizes a global cost was established in the case where the a priori probabilities of the hypotheses, the distribution functions of local observations, the cost functions, and the fusion rule are given. They concluded that each local detector is optimally a likelihood ratio detector but that the computation of the optimum thresholds for these local detectors is complicated due to cross coupling. Sadjadi [2] generalized the work of [l] to n detectors and m hypotheses and obtained similar conclusions. Reibman and Nolte [6] showed how to use numerical approaches to find

Fig. 1. -0-level distributed detection system.
a global optimum system for a particular detection problem.
lb alleviate the difficulties of global optimization, two locally optimum approaches have been presented in the literature. One treats the decision rule of the fusion center as fixed and seeks to optimize the decision thresholds of local detectors. Along this line, Srinivasan [3] and Conte, et al. [4] assumed that the fusion center employs some ‘‘logic combining (e.g., OR, AND, etc.)” decision rule and optimized local decision thresholds using the Neyman-Pearson strategy. The other approach treats the local decision rules (including the thresholds) as given and seeks to optimize the system performance by optimizing the decision rule of the fusion center. Although this second approach may appear to be somewhat restrictive, it is justified in the scenario where the distributed detection system is to be designed using existing local detectors. More importantly, this approach offers flexibility in local detector types. In other words, a local detector does not need to use likelihood ratio as a decision statistic; depending on its local statistical environment, it can be an optimum detector or a suboptimum detector of some kind. Note that likelihood ratio tests entail complete statistical characters of local observations, which are not necessarily available. Difficulties may also arise when analysis of optimum local detection schemes is not tractable. Using this approach, Chair and Varshney [A derived the Bayesian optimum fusion rule as a weighted sum of local decisions, the weights being functions of local false alarm rates and probabilities of detection. Thomopoulos e t al. [8] obtained similar results using the Neyman-Pearson criterion. We follow basically this latter approach. Specifically, we assume that the decision statistic as well as the decision threshold between the two hypotheses for each local detector are given and fixed. However, we impose additional decision thresholds on the local decision rule because, instead of producing a one-bit hard decision, we require that each detector provide the fusion center additional information.
As was mentioned previously, a one-bit hard decision was usually assumed for a local detector. This certainly minimizes communication cost. From the viewpoint of the fusion center, each local decision represents an observation. Ideally, this observation should be a likelihood ratio. Therefore,
a hard local decision is equivalent to a two-level quantization of a “full” observation-the likelihood ratio. Such a hardlimiting process certainly implies a substantial information loss [9, 101. In practice, the communication channel may be capable of handling more than one bit of decision information per local detector per decision. It is reasonable to expect that additional information from the local detectors regarding their decisions would assist the fusion center in assigning proper weights to local decisions and thereby achieve better detection performance. We show that this is indeed the case. We start Section I1 with the derivation of the optimum decision fusion rule for multiple-bit local decisions. With regard to generation of optimum multiple-bit local decisions, the underlying issue is optimum subpartitioning of local decision spaces. First of all, to produce a hypothesis decision, a local decision space must be partitioned into two exclusive regions, each corresponding to a hypothesis. In the “one-bit hard decision” case, a local decision is made in complete favor of one hypothesis, when the observation falls in the decision region of this hypothesis, regardless of the distance between the observation and the decision boundary. In reality, however, some local detectors may be stronger about their decisions than others owing to crossing the decision threshold by a large margin, for example. With one or more additional bits, a local detector would be able to convey such information. This certainly entails a subpartitioning of each decision region in accordance with distance between the local decision statistic and the decision threshold. Clearly, the subpartitioning is essential for the detection performance of the system. We show that the subpartitioning problem is equivalent to partitioning of the probability of false alarm and the probability of miss. The optimum subpartitioning of local decision space for the two-bit local decision case is studied in Section 11. The analysis is then extended to the general m-bit case in Section 111. A radar detection example is used for performance study in Section IV. Based on optimum multiple-bit local decisions, we show that the resulting system significantly outperforms the one that uses hard local decisions. Although a larger m could lead to a better system performance as is evidenced by our performance results, it is important to keep this number down so that bandwidth conservation and certain benefits of distributed systems remain intact. In fact, it is observed that using 3-bit local decisions is very adequate to lift the detection performance of the distributed detection system to nearly optimum (i.e., the performance of an optimum centralized system). We note that the theory behind these results is basically the same as that behind signal detection based on input quantization [9, 101. Some concluding remarks are given in Section V
SPACE PARTITIONING FOR DISTRIBUTED DETECTION 537

I I . DISTRIBUTED DETECTION SCHEME BASED ON TWO-BIT LOCAL DECISIONS
We consider a distributed detection system which has n independent local detectors. For every local detector, we assume that the functional relationship between the false alarm probability and the probability of detection (i.e.., the receiver operating characteristics) is known. Let X' be the observation vector of the ith local detector. Then the local decision space is given by Ri = {all possible realizations of X i } . If a local decision ui is a one-bit hard decision, then the associated decision space R' is partitioned into two exclusive regions, R', and RL, such that
u ~ = H , if X i € R &
~i = K , if X i ~ 5 2 k .
where H is the hypothesis that signal is absent and K the hypothesis that signal is present. The above decision rule is associated with a probability of false alarm:
P{Ui = K I H } = ai,
and a probability of detection:
i = 1,2, ..., n (1)
P { u i = K I K } = p i , i = 1 , 2 ,..., n. (2)
Both ai and pi depend on the decision threshold whose optimum value with respect to the global decision can be determined [3] if the local detectors employ likelihood ratio tests. In order to improve the performance, a multiple-bit local decision instead of a one-bit hard decision can be used. This entails that each of Q', and 52& be subpartitioned. For illustration purpose, we first consider the 2-bit case. In this case, we have
R', = un&, nQ& = @
~ i , = ni,, us&, nil nnk2 = +. The associated decision rule is then given by
Hl (decision is H with lower confidence),
H2 (decision is H with higher confidence),
K1 (decision is K with lower confidence),
K2 (decision is K with higher confidence),
if Xi E Cl&
if Xi E Cl&
if Xi E Cl&
if Xi E aiz.
u j = { Corresponding to ai and pi in the one-bit case, we have, for 1 5 i 5 n, j = 1,2,
P { ~ i = K j I H } = a i j
P{Ui = Hj I H } = pij
P { u ~ = Kj I K } = P i j
In terms of ai and pi, these numbers are related as
and
qi1 + qi2 = qi = 1 - pi .
Let U = ( ~ 1 , ~ 2 , . . . , U,) be local decisions which form the observation vector of the fusion center. Assuming independence between local detectors, the likelihood
given by ratio is
p(u P(U
where nq is the number of local decisions ui which assume Yj, Y = H , K , j = 1,2, and nK1 + nx, + nH, + nHz = n. The optimum decision rule for the fusion center follows:
( > t * K
T(U) = log - < t + H P(U I H )
. . I
= t + K with Pr 7, H with Pr 1 - 7
where t is the decision threshold and 7 is a randomization parameter. We note that randomization is necessary because of the discrete nature of T(U). The decision statistic T(U) can be written as
n r n r-
n U. nu- P(u; = H2 I K ) P(u; = H2 1 H ) P(uj = Hi 1 K ) + 210g + 210g
P(u; = Hi I H ) i=l i=l
where
(7)
and
538 IEEE TRANSACTIONS ON AEROSPACE AND ELECTRONIC SYSTEMS VOL. 25, NO. 4 JULY 1989
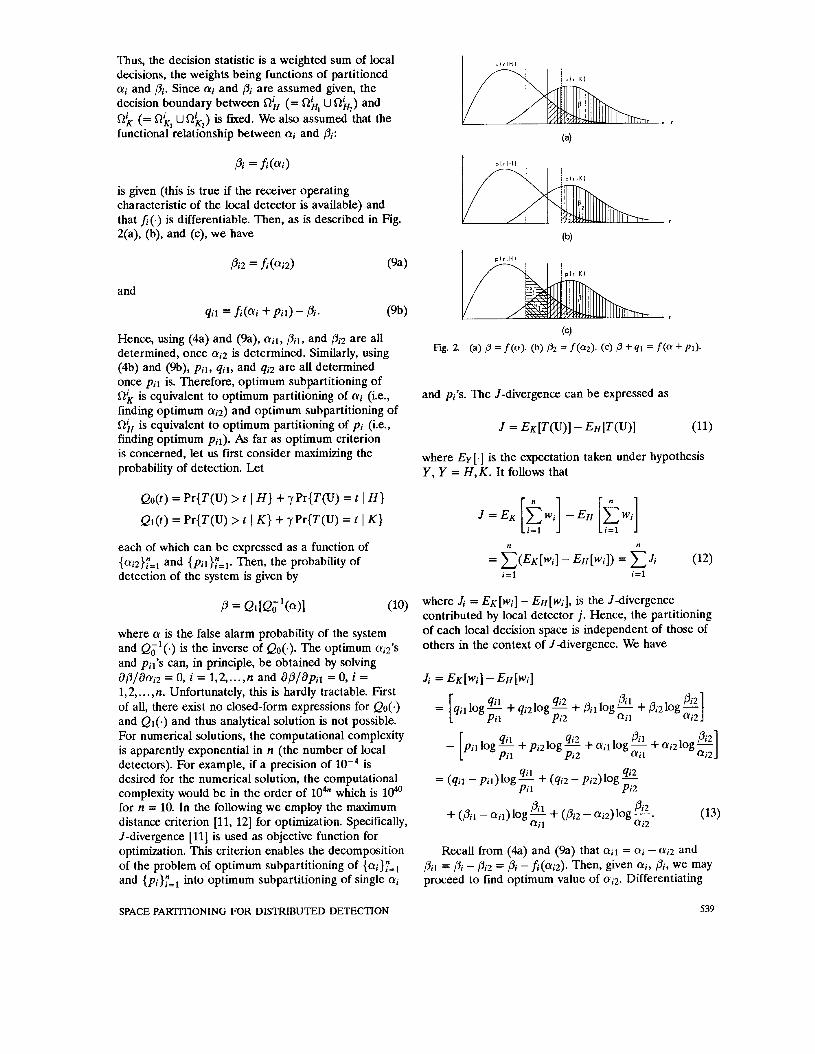
Thus, the decision statistic is a weighted sum of local decisions, the weights being functions of partitioned ai and Pi . Since ai and Pi are assumed given, the decision boundary between R& (= R&] U ah2) and R', (= Cl',] U R i J is fixed. We also assumed that the functional relationship between ai and Pi:
Pi = fi(ai)
is given (this is true if the receiver operating characteristic of the local detector is available) and that A ( . ) is differentiable. Then, as is described in Fig. 2(a), (b), and (c), we have
Hence, using (4a) and (Sa), ail, P i l , and Pi2 are all determined, once ai2 is determined. Similarly, using (4b) and (Sb), pil , qil, and qi2 are all determined once pi1 is. Therefore, optimum subpartitioning of a', is equivalent to optimum partitioning of ai (i.e., finding optimum ai2) and optimum subpartitioning of
is equivalent to optimum partitioning of pi (i.e., finding optimum pil) . As far as optimum criterion is concerned, let us first consider maximizing the probability of detection. Let
Qo(t) = Pr{T(U) > t I H } + 7Pr{T(U) = t I H }
Q l ( t ) = Pr{T(U) > t I K} + rPr{T(U) = t I K }
each of which can be expressed as a function of {a i2} ;=1 and {Pi l }y=l . Then, the probability of detection of the system is given by
where a is the false alarm probability of the system and e,'(.) is the inverse of Qo(.) . The optimum ai2's and pil's can, in principle, be obtained by solving ap/aai2 = 0, i = 1,2 ,..., n and ap/api l = 0, i = 1,2, . . . ,n. Unfortunately, this is hardly tractable. First of all, there exist no closed-form expressions for Qo( . ) and el(.) and thus analytical solution is not possible. For numerical solutions, the computational complexity is apparently exponential in n (the number of local detectors). For example, if a precision of lod4 is desired for the numerical solution, the computational complexity would be in the order of lo4" which is 1040 for n = 10. In the following we employ the maximum distance criterion [ll, 121 for optimization. Specifically, J-divergence [ l l ] is used as objective function for optimization. This criterion enables the decomposition of the problem of optimum subpartitioning of {ai};=l and {pi};=l into optimum subpartitioning of single a;
and pi's. The J-divergence can be expressed as
where Ey[ . ] is the expectation taken under hypothesis Y, Y = H,K. It follows that
n n
where J; = E K [ W ~ ] - E H [ W i ] , is the Jdivergence contributed by local detector J. Hence, the partitioning of each local decision space is independent of those of others in the context of Jdivergence. We have
Recall from (4a) and (Sa) that ai1 = ai - ai2 and pil = Pi - Pi2 = Pi - fi(ai2). Then, given ai, Pi , we may proceed to find optimum value of ai2. Differentiating
SPACE PAKI'ITIONING FOR DISTRIBUTED DETECTION 539

Ji with respect to ai?, we obtain
where fl(.) denotes the derivative of fi(.). Setting aJi /acri;! = 0 yields a', =R',Ua &... Ung,
Its solution gives the optimum partitioning of ai and pi. Recall from (4b) and (9b) that,
qil = fi(ai + Pil) - Pi
qi2 = 1 - Pi - qi1 = 1 - f i ( Q i + pit)
pi2 = 1 - cri - pi1.
and
Setting aJi/ap;l = 0, and using si = cri + pi1 yields
where
nohi = 0, for k # j
and
a;, = Rk, unk2...unkm,
where
n i k n Q i j = 0, for k # j .
We can thus obtain the optimum partitioning of pi by solving the above equation.
The parameters aij, Pi j , pij, and q i j defined in (3) still apply with 1 5 j 5 m, however. They satisfy
Ill. OPTIMUM PARTITIONING OF LOCAL DECISION SPACE-GENERAL CASE
In the general case where m may be greater than two, we have
540 IEEE TRANSACTIONS ON AEROSPACE AND ELECTRONIC SYSTEMS VOL. 25, NO. 4 JULY 1989

and aJi/acyij = 0 can be reduced to
f ; / ( c y j j + ’ . . + aim)
- logA;j-l+ Aij-1- logAij - A;j - (17)
logAij-1- (l/Aij-l) - logAij + (l/Aij)
where Aij = & j / c y ; j , j = 2,3 ,..., in, and Ai1 = /3il/ail; and aJi/apij = 0 can be reduced to
h’(pi1 + ’ . . + p;j + cy; )
(18) - lOgBij + B;j - lOgB;j+l- B;j+l logBij - (1/Bij) - logBij+l+ (l /Bij+l)
-
where Bij = gij/p;j, j = 1,2,. . . , m - 1, and Bi, = qim/Pim. It is also essential to establish that the optimum partition obtained is nontrivial. Specifically, the solution for optimum cy; j (or p;j), j = 2,3,. . . , m - 1, is trivial if it includes zero value(s) which implies that the actual number of partitions is less than m. Let J*(k - 1) and J’ (k) be Jdivergences associated with the optimum partitions for m = k - 1 and m = k, respectively. To establish that the optimum partition is nontrivial, it is sufficient to prove that
J: (k) > J: (k - 1). k-1
Let {Q:l,clifz ,..., C~:k-l}, with cj=l the optimum (k - 1)-level partition of cy;, i.e., the partition that gives J-divergence J* (k - 1). Consider the following k-level partition of a;
= ai, denote
Corresponding to (7) and (8) in Section 11, we now have the decision statistic:
where
Pi j log-, if U ; “ K j
9ij Pi j
ai j
log-, if U ; = Hi wi =
i = 1 ,..., n, j = 1 ,..., m.
Similarly, the Jdivergence in the general case can be expressed as
where
are local Jdivergences. Given the functional relationship between cy; and Pi, i.e., p; = f i (cy i ) , we have
It is readily shown that the quadratic form [a2J;/aaijaa;k] is a tridiagonal matrix. Under the regularity assumptions that fi’ > 0, and fi” < 0, it can be shown [13] that this matrix is negative definite for all cr;j and cy+ Similarly, the matrix [a2Ji/ap;jdp;k] is negative definite. Therefore the simultaneous equations aJi/aaij = 0, j = 2,3,. . . , m, have a unique nonsingular solution for aij and the simultaneous equations aJi/ap;j = 0, j = 1,2,. . . , m - 1, have a unique nonsingular solution for p;j [14]. These solutions give the maximum of Ji [13]. Specifically,
and let Ji(k) denote the resulting Jdivergence. Note that c;=lcy;j = Crr:a;j = cy; and thus {a;l,cy;2, . . . , (~ jk - l , (Y;k) is a legitimate k-level partition of cy;. Therefore, we have J;(k) 5 J,’(k). Furthermore, it can be shown [13] that J,’(k - 1) < Ji(k). Hence, we indeed have Ji* (k - 1) < Ji’ (k) and the optimum partition obtained is nontrivial.
IV. PERFORMANCE
Let A = {(uI, . . ., U,); Cyz1 wi 2 t } be the decision region of the fusion center that belongs to hypothesis K. Then the false alarm probability is given by
and the detection probability
Po = C P ( U I K ) = U€ A
As an example for performance study, we consider the problem of radar detection under the environment of Rayleigh fluctuation. We note that this example is
SPACE PAKHTIONING FOR DISTRIBUTED DETECTION 541
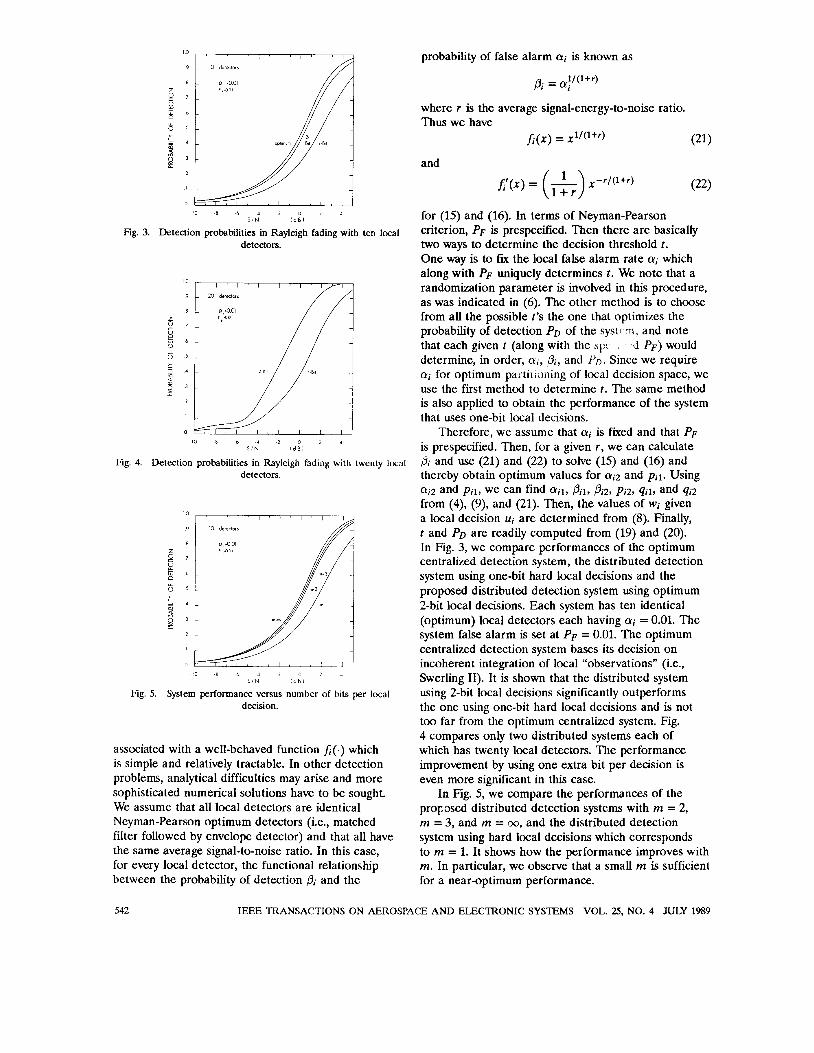
Fig. 3.
9
8
I ' I ' I ' I I i ' 1 ' 1
- 10 detectax
- 0 ,001 /
g :VJ, DOlmvm 0 , 1 0 , ,I Q 3
2
I
0
1 0 8 h A 2 0 2 4 S I N l d B l
Detection probabilities in Rayleigh fading with detectors.
:: / / i
ten local
I O 8 b 4 2 0 2 4
S I N l d B l
Fig. 4. Detection probabilities in Rayleigh fading with twenty local detectors.
10
9
8 z
U E h
g 7
Y
t
P d m
2 0 3 e
2
L
i
I
'0 8 6 4 2 0 2 4
S I N i d 0 1
Fig. 5. System performance versus number of bits per local decision.
associated with a well-behaved function A ( . ) which is simple and relatively tractable. In other detection problems, analytical difficulties may arise and more sophisticated numerical solutions have to be sought. We assume that all local detectors are identical Neyman-Pearson optimum detectors (i.e., matched filter followed by envelope detector) and that all have the same average signal-to-noise ratio. In this case, for every local detector, the functional relationship between the probability of detection pi and the
probability of false alarm ai is known as
where r is the average signal-energy-to-noise ratio. Thus we have
(21)
(22)
A ( x ) = x1/(1+4
and f;:'(x) = (-) 1 x - 4 1 + 4
l + r
for (15) and (16). In terms of Neyman-Pearson criterion, PF is prespecified. Then there are basically two ways to determine the decision threshold t. One way is to fN the local false alarm rate ai which along with PF uniquely determines t. We note that a randomization parameter is involved in this procedure, as was indicated in (6). The other method is to choose from all the possible t's the one that optimizes the probability of detection PD of the systi 71, and note that each given t (along with the sp d PF) would determine, in order, ai, pi, and PD. Since we require ai for optimum partitiaIling of local decision space, we use the first method to determine t. The same method is also applied to obtain the performance of the system that uses one-bit local decisions.
Therefore, we assume that ai is fixed and that PF is prespecified. Then, for a given r , we can calculate p; and use (21) and (22) to solve (15) and (16) and thereby obtain optimum values for ai2 and pil. Using
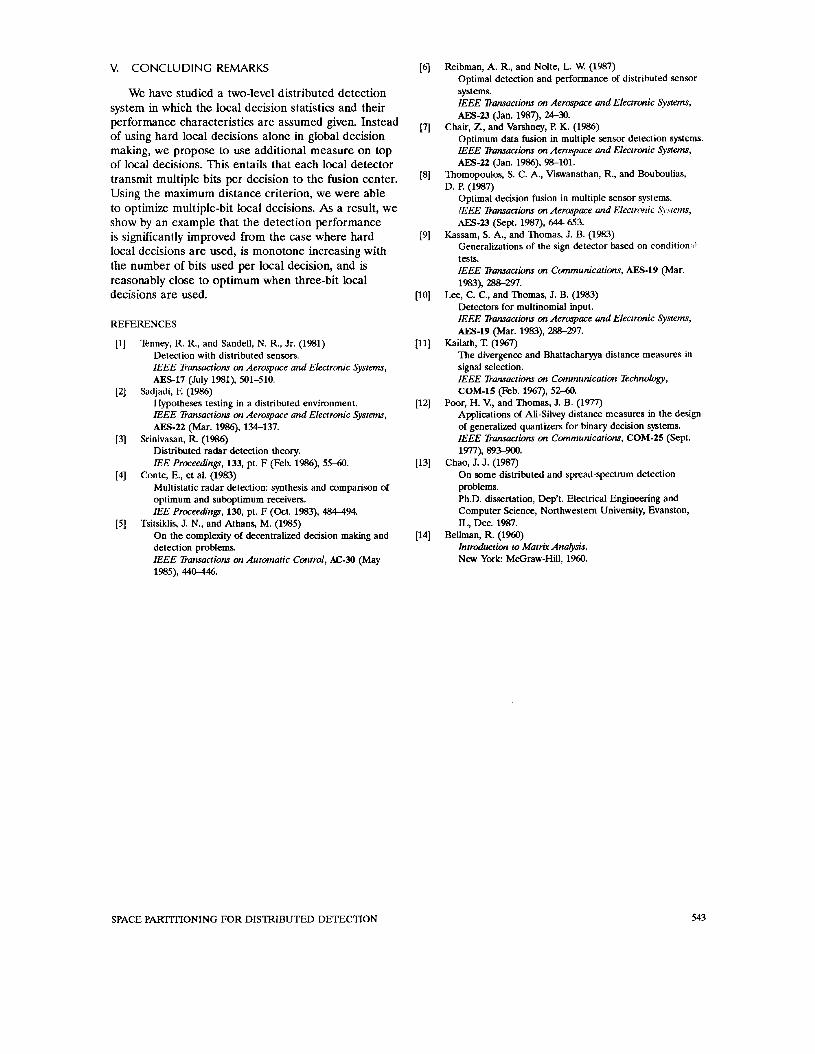
from (4), (9), and (21). Then, the values of wi given a local decision ui are determined from (8). Finally, t and PD are readily computed from (19) and (20). In Fig. 3, we compare performances of the optimum centralized detection system, the distributed detection system using one-bit hard local decisions and the proposed distributed detection system using optimum 2-bit local decisions. Each system has ten identical (optimum) local detectors each having ai = 0.01. The system false alarm is set at PF = 0.01. The optimum centralized detection system bases its decision on incoherent integration of local "observations" (i.e., Swerling 11). It is shown that the distributed system using 2-bit local decisions significantly outperforms the one using one-bit hard local decisions and is not too far from the optimum centralized system. Fig. 4 compares only two distributed systems each of which has twenty local detectors. The performance improvement by using one extra bit per decision is even more significant in this case.
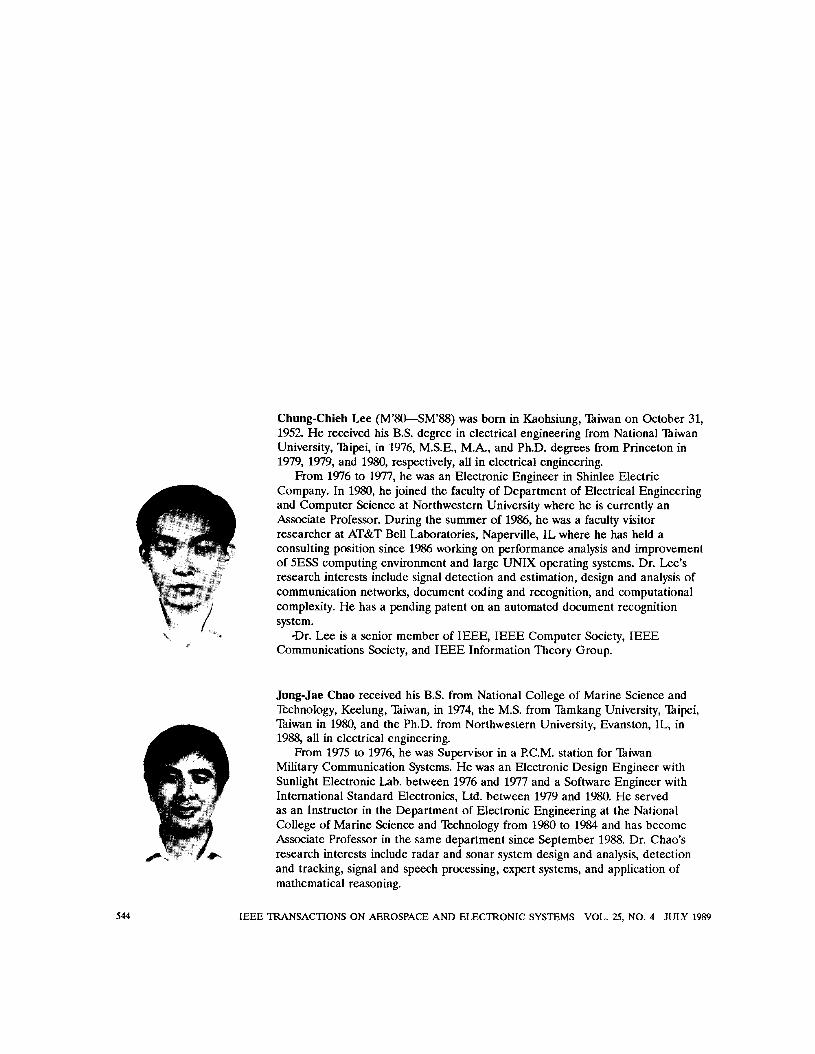
In Fig. 5, we compare the performances of the p r o p e d distributed detection systems with m = 2, m = 3, and m = 03, and the distributed detection system using hard local decisions which corresponds to m = 1. It shows how the performance improves with m. In particular, we observe that a small m is sufficient for a neareptimum performance.
ai2 and Pi19 we can find ail, p i 1 9 pi29 pi29 q i l , and qi2
542 IEEE TRANSACTIONS ON AEROSPACE AND ELECTRONIC SYSTEMS VOL. 25, NO. 4 JULY 1989
V. CONCLUDING REMARKS
We have studied a two-level distributed detection system in which the local decision statistics and their performance characteristics are assumed given. Instead of using hard local decisions alone in global decision making, we propose to use additional measure on top of local decisions. This entails that each local detector transmit multiple bits per decision to the fusion center. Using the maximum distance criterion, we were able to optimize multiple-bit local decisions. As a result, we show by an example that the detection performance is significantly improved from the case where hard local decisions are used, is monotone increasing with the number of bits used per local decision, and is reasonably close to optimum when three-bit local decisions are used.
REFERENCES
[l] Xnney, R. R., and Sandell, N. R., Jr. (1981) Detection with distributed sensors. IEEE Transaciions on Aerospace and Electronic Sysiems, AES-17 (July 1981), 501-510.
[2] Sadjadi, E (1986) Hypotheses testing in a distributed environment. IEEE Transactions on Aerospace and Elecironic Systems, AES-22 (Mar. 1986), 134-137.
Distributed radar detection theory. IEE Proceedngs, 133, pt. F (Feb. 1986), 5540.
Multistatic radar detection: synthesis and comparison of optimum and suboptimum receivers. IEE Proceedngs, 130, pt. F (Oct. 1983), 484-494.
On the complexity of decentralized decision making and detection problems. IEEE li-ansachns on Automatic Control, AC-30 (May 1985), 440446.
[3] Srinivasan, R. (1986)
[4] Conte, E., et al. (1983)
[SI Tsitsiklis, J. N., and Athans, M. (1985)
I61
[91
Reibman, A. R., and Nolte, L. W. (1987) Optimal detection and performance of distributed sensor systems. IEEE Transactions on Aermpace and Electronic Sysiems, AES-23 (Jan. 1987), 24-30.
Optimum data fusion in multiple sensor detection systems. IEEE Transactions on Aerospace and Electronic Systems, AES-22 (Jan. 1986), 98-101.
Chair, Z, and Varshney, P. K. (1986)
Thomopoulos, S. C. A., Viswanathan, R., and Bouboulias, D. P. (1987)
Optimal decision fusion in multiple sensor systems. IEEE Transactions on Aerospace and Electriwnrc St ,rem, AES-23 (Sept. 1987), 644-653.
Kassam, S. A., and Thomas, J. B. (1983) Generalizations of the sign detector based on condition,%’ tests. IEEE Transactions on Communications, AES-19 (Mar. 1983), s 2 9 7 .
Lee, C. C., and Thomas, J. B. (1983) Detectors for multinomial input. IEEE Transaciions on Aerospace and Elecironic Systems, AES-19 (Mar. 1983), 2B-297.
The divergence and Bhattacharyya distance measures in signal selection. IEEE l?ansaciwns on Communication Technology, COM-15 (Feb. 1%7), 52-60.
Applications of Ab-Silvey distance measures in the design of generalized quantizers for binary decision systems. IEEE Transoctwns on Communications, COM-25 (Sept. 1977), 89S900.
Chao, J. J. (1987) On some distributed and spread-spectrum detection problems. Ph.D. dissertation, Dep’t. Electrical Engineering and Computer Science, Northwestern University, Evanston, IL, Dec 1987.
Bellman, R. (1960) Iniroahciion to Matrix Analysis. New York: McGraw-Hill, 1960.
Kailath, T. (1%7)
Poor, H. V., and Thomas, J. B. (1977)
SPACE PAIiTITIONING FOR DISTRIBUTED DETECTION 543
Chung-Chieh Lee (M’SO-SM88) was born in Kaohsiung, Biwan on October 31, 1952. He received his B.S. degree in electrical engineering from National Biwan University, nipei, in 1976, M.S.E., M.A., and Ph.D. degrees from Princeton in 1979, 1979, and 1980, respectively, all in electrical engineering.
From 1976 to 1977, he was an Electronic Engineer in Shinlee Electric Company. In 1980, he joined the faculty of Department of Electrical Engineering and Computer Science at Northwestern University where he is currently an Associate Professor. During the summer of 1986, he was a faculty visitor researcher at AT&T Bell Laboratories, Naperville, IL where he has held a consulting position since 1986 working on performance analysis and improvement of 5ESS computing environment and large UNIX operating systems. Dr. Lee’s research interests include signal detection and estimation, design and analysis of communication networks, document coding and recognition, and computational complexity. He has a pending patent on an automated document recognition system.
-Dr. Lee is a senior member of IEEE, IEEE Computer Society, IEEE Communications Society, and IEEE Information Theory Group.
Jung-Jae Chao received his B.S. from National College of Marine Science and Technology, Keelung, Biwan, in 1974, the M.S. from nmkang University, Taipei, Biwan in 1980, and the Ph.D. from Northwestern University, Evanston, IL, in 1988, all in electrical engineering.
Military Communication Systems. He was an Electronic Design Engineer with Sunlight Electronic Lab. between 1976 and 1977 and a Software Engineer with International Standard Electronics, Ltd. between 1979 and 1980. He served as an Instructor in the Department of Electronic Engineering at the National College of Marine Science and Technology from 1980 to 1984 and has become Associate Professor in the same department since September 1988. Dr. Chao’s research interests include radar and sonar system design and analysis, detection and tracking, signal and speech processing, expert systems, and application of mathematical reasoning.
From 1975 to 1976, he was Supervisor in a P.C.M. station for Wwan
544 IEEE TRANSACTIONS ON AEROSPACE AND ELECTRONIC SYSTEMS VOL. 25, NO. 4 JULY 1989