operadores y ecuaciones lineales - diego patino's web...
TRANSCRIPT

SISTEMAS LINEALESCAPITULO 2º
OPERADORES Y ECUACIONES LINEALES
Ing. Diego A. Patiño G., M. Sc., Ph.D.

2
OPERADORES LINEALESLa operación de cambio de base no cambia al vector, simplemente cambia el sistema coordenado en el cual está representando.
Bxx =ˆ
Una operación lineal es una función en el espacio vectorial. Es un proceso por medio del cual un vector dado se transforma en
un vector totalmente diferente. Un operador lineal puede realizar un cambio de base, tomar un vector de un espacio y transformarlo a otro, etc.
3
OPERADORES LINEALES
Operador Lineal: es una regla que asocia a vectores diferentes que pueden estar o no en el mismo espacio vectorial.Un operador lineal A desde un espacio vectorial lineal X a un espacio vectorial lineal Y, A: X → Y, es lineal si
con y escalares.Xxx ∈21, 21,αα
( ) 22112211 AxAxxxA αααα +=+

4
OPERADORES LINEALES
La transformación u operación lineal A: X → Y produce un vector y ∈ Y que se puede escribir como Ax = y. El vector resultante de esta operación está en el rango del operador A y es la imagen de x en Y (x es la preimagen de Y).
Espacio Rango: El espacio rango de un operador A: X → Y, R(A), es el conjunto de todos los vectores yi ∈ Y tal que para cada yi ∈ R(A), existe un xi ∈ X tal que Ax = y.

5
OPERADORES LINEALES
X YA1x2x 1y
2yuno a uno
( )yA 1−
( )[ ]yAA 1−
( )1xA
( )2xAEspacio X R(A): Espacio rangoAx = y

6
OPERADORES LINEALESSi R(A) es todo Y, entonces A se define como “onto”, es decir que cada elemento en Y es la imagen de por lo menos un x ∈ X.
Si A transforma elementos de X a valores únicos en Y, esto es si x1 ≠ x2, entonces A(x1) ≠ A(x2), A es uno a uno o “injectivo”.
Si el operador A es simultáneamente uno a uno y “onto” se denomina “biyectivo”.
Un operador es invertible si y solo si existe otro operador notado A-1: Y → X tal que A-1 [A (x)] = x y A[A-1(y)] = y.
A-1A = Ix , AA-1 = Iy , son los operadores identidad en sus espacios respectivos.

7
OPERADORES LINEALES
Cuando A transforma un espacio en sí mismo A: X→X es igual a AA-1 = A-1A = I.Cuando R(A) está siempre contenido o es igual a Y :
A transforma a X into Y
YAR ⊆⇒ )(
Espacio Nulo: el espacio nulo de un operador A, denotado N(A), es el conjunto de todos los vectores x ∈ Xtales que A(xi) = 0.
( ) { }0/ =∈= ii AxXxAN

8
OPERADORES LINEALES
Representación Matricial de un Operador Lineal:Para propósitos computacionales cualquier operador lineal de dimensiones finitas se puede representar por medio de una matriz A.El espacio rango de A, R(A), es el subespacio Y, cuya dimensión es el rango de A. El espacio nulo de A, N(A), es un subespacio de X cuya dimensión es la nulidad de la matriz A.

9
OPERADORES LINEALESDados dos vectores, x y y, uno de un espacio de n dimensiones y otro de un espacio de m dimensiones, esto es x ∈ Xn, y ∈ Xm. Se desea obtener una representación para un operador A que transforma
A: Xn → Xm
Sean v y u bases para estos espacios:
{ } { } nnj Xvvvv para ,,, 21 L=
{ } { } mmi Xuuuu para ,,, 21 L=
Un vector x en Xn se puede expandir en función de la base como
∑=
=n
jjj
1
vx α

10
OPERADORES LINEALESy como el operador es lineal
El efecto del operador lineal A sobre cualquier vector x se puede evaluar calculando el efecto de A sobre los vectores base a partir de los cuales escribe x
( )∑∑==
=⎭⎬⎫
⎩⎨⎧
==n
jjj
n
jjj
11vAvAAxy αα
( ) ( ) ( )[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
==
nα
αα
ML 2
1
n21 vAvAvAAxy

11
OPERADORES LINEALESComo y pertenece a Xm entonces cada vector Avj es un vector en el espacio rango Xm. Los vectores en Xm se pueden expandir en términos de los vectores base {ui}
∑=
=m
iiijj a
1
uAv
pero también se puede expandir directamente en términos de su base
∑∑∑∑====
==→=m
iii
m
ijij
n
jj
m
iji a
1111
uuyuy βαβ

12
OPERADORES LINEALESComo la expansión es única y cambiando el orden de la sumatoria
∑∑ ∑== =
=⎟⎟⎠
⎞⎜⎜⎝
⎛ m
iii
m
ii
n
jjija
11 1uu βα
entonces
mian
jjiji ,,1
1
L=∀= ∑=
αβ
La multiplicación de aijαj es el producto de una matriz y un vector.

13
OPERADORES LINEALES
Si α = [α1 α2 … αn]T es la representación de x ∈ Xn
respecto a la base {vi} y β = [β1 β2 … βm]T es la representación de y ∈ Xm respecto a la base {ui}, entonces y se puede representar como la multiplicación matricial β = Ax con
⎟⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜⎜
⎝
⎛
=
mnmm
n
n
aaa
aaaaaa
............
..
..
21
22221
11211
A

14
OPERADORES LINEALES
El elemento (i,j)- ésimo de A corresponde al coeficiente aij y describe como el operador A transforma los vectores base de un espacio en los vectores base del espacio rango.En resumen, la j- ésima columna de la representación matricial de un operador lineal A: Xn → Xm se construye como la representación del vector resultante de Aactuando sobre el j- ésimo vector base de Xn, respecto a la base del espacio rango

15
OPERADORES LINEALES
La j- ésima columna de A es Avj representado respecto a la base {ui} del espacio rango Xm
De esta forma se puede representar cualquier operador lineal como una matriz y toda matriz se puede interpretar como un operador lineal. Por ejemplo la operación lineal y = Ax se puede representar numéricamente como
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
nmnmm
n
n
x
xx
aaa
aaaaaa
M
L
MOMM
L
L
2
1
21
22221
11211
y

16
OPERADORES LINEALES
La columna ai representa la i – ésima columna de la matriz A y xi es la i- ésima componente del vector x.Como el espacio rango es el espacio de todos los posibles valores de Ax, se puede representar como el “span” de todos las columnas de A.

17
OPERADORES LINEALES
El rango de la matriz A es igual a la dimensión del espacio rango del operador lineal A.
( ) ( )[ ]AΑ Rdim=ρPor su parte el espacio nulo del operador A se puede representar como el espacio de todas las soluciones de
0Ax =Entonces la dimensión del espacio nulo del operador A es igual a la nulidad de la matriz A
( ) ( )[ ]AA Ndim=η

18
OPERADORES LINEALESEjemplo: Considerar un operador lineal, A: R2 → R2, que toma un vector x y lo rota en en el sentido contrario al de las manecillas del reloj un ángulo θ. Encontrar la representación matricial del operador lineal que logra la rotación planar sobre vectores arbitrarios en R2, y probar la matriz resultanate rotando el vector x = [1 2]T un ángulo de 30º.
θ
x
Axy =

19
OPERADORES LINEALESPara encontrar la representación matricial de cualquier operador, son necesarias las bases de cada espacio, así como el efecto del operador en dichas bases. En este caso usaremos los vectores bases del plano cartesiano como se muestra en la siguiente figura
θ
θ1Ae
1e
2Ae 2e Descomponiendo los vectores rotados Ae1 y Ae2 a lo largo de las direcciones de las bases originales tenemos
[ ] ⎥⎦
⎤⎢⎣
⎡=⋅+⋅=
θθ
θθsincos
sincos 21211 eeeeAe
[ ] ⎥⎦
⎤⎢⎣
⎡−=⋅+⋅−=
θθ
θθcossin
cossin 21212 eeeeAeTomado de 1. Cap. 3

20
OPERADORES LINEALESEntonces la matriz de representación es
⎥⎦
⎤⎢⎣
⎡ −=
θθθθ
cossinsincos
A
Aplicando esto al vector x = [1 2]T , se tiene:
⎥⎦
⎤⎢⎣
⎡−=⎥
⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡ −=
23.2134.0
21
º30cosº30sinº30sinº30cos
Ax

21
OPERADORES LINEALES

22
OPERADORES LINEALES EN DIFERENTES BASES
En las aplicaciones de sistemas descritos por variables de estado y en el diseño de sistemas de control resultan de gran utilidad las transformaciones de un espacio dentro de si mismo, esto es
nn ℜ→ℜ:AEsto implica que A es cuadrada y se está haciendo un cambio de base.La matriz A que transforma Xv → Xv es una transformación de la base original {vi}.
El operador que transforma vectores expresados en una base diferente se denota Â.}ˆ{ iv

23
OPERADORES LINEALESUtilizando esta notación
xAyAx y ˆˆˆy ==con representados en la base . yx ˆ,ˆ { }iv
¿Como se transforma una representación matricial de un operador de una base a otra?
Teniendo en cuenta que
ByyBxx == ˆy ˆentonces
( )xBAByBxAByxAy 1 ˆ ˆ ˆˆˆ −=→=→=

24
OPERADORES LINEALESB-1 debe existir dado que es una matriz (n × n) de cambio de base y de rango completo.
Comparando con la expresión original y = Ax
ABABBABA 11 ˆ o ˆ == −−
si hacemos
AMMAMAMAMB 111 −−− ==→= ˆ o ˆ
La operación anterior se denomina una transformación similar y corresponde, por ejemplo, al proceso de desarrollar diferentes representaciones para variables de estado.

25
OPERADORES LINEALESEstas transformaciones se puede relacionar con el siguiente grafico
Bxx =ˆ
y
Axy =
x
AMMBABA 11 −− ==ˆ
Representado respecto a la nueva base
Representado respecto a la base original { }iv{ }iv
B
BA
Diferentes trayectorias de transformación llevan al mismo resultado.

26
OPERADORES LINEALESOperadores como Espacios:
( )xAAxAxA 2121 +=+
Como el conjunto de los operadores es un espacio, debe satisfacer los demás requisitos de los espacios lineales. Por ejemplo, los operadores tiene las operación de adición, la cual toma la forma de la adición matricial (elemento a elemento),
Dado que los operadores lineales se representan por medio de matrices, entonces el espacio de los operadores es un espacio matricial y, además, es un Álgebra Lineal porque está definida la operación de multiplicación.
El conjunto de todos los operadores lineales desde un espacio hacia otro, o desde un espacio hacia si mismo, es un espacio vectoriallineal.

27
NORMAS OPERADORES
Una norma sobre una matriz es “a matrix norm” si además de las 4 propiedades de las normas de vectores:
Cumple la propiedad multiplicativa o de consistencia:21
escalar
00
0
AA
αAαA
AA
A
+≤+
=
=⇔=
≥
21 AA
α
BAAB ≤

28
NORMAS OPERADORES
Las siguientes normas cumplen todas las propiedades y son “Matrix Norms”
La “Max element norm” no cumple consistencia
NORM" MATRIX SUM" ,
⎟⎟⎠
⎞⎜⎜⎝
⎛= ∑
n
jiijsum
aA
( )[ ]
diagonal la de elementos los de suma
Norm" Frobenius"2
1
,
221
∑
∑
=
⎥⎦
⎤⎢⎣
⎡==
ii
n
jiij
TF
a trace
aAAtrA
ijjiMAXaA
,max=

29
NORMAS INDUCIDAS
NORMAS INDUCIDAS: intuitivamente se interpretan como una medida de la amplificación en sistemas. Dado un sistema con relación entrada – salida dada por:
La ganancia del sistema se define como la relación.
x
y
Axy =

30
NORMAS INDUCIDAS
La máxima ganancia para todas las direcciones posibles de la entrada está dada por la NORMA INDUCIDA:
donde es la norma del vector de entrada.La norma inducida es la mayor “amplificación”posible de la matriz
p
p
xip x
AxA
0max
≠=
p
i
pip
wx1
⎟⎠
⎞⎜⎝
⎛= ∑

31
NORMAS OPERADORES
Las normas inducidas son:
Las normas inducidas son “matrix norms”
A de propior mayor valo espectral radio )(max r(A)
norm svor spectral )()(
sum row maximum max
sumcolumn maximum max
ii
2
1
==
==
⎟⎟⎠
⎞⎜⎜⎝
⎛=
⎟⎠
⎞⎜⎝
⎛=
∑
∑
∞
A
AArA
a
a
Ti
jijii
iijji
λ
σA
A
A

32
OPERADORES LINEALES
Operador Adjunto: de un operador lineal A se denota como A* y debe satisfacer:
A* es igual a la transpuesta conjugada en una base ortonormal, esto es:
Para A real y representada en una base ortonormal
yxyAxyAx , *,, ∀=
( )TAA =*
( )TAA =*

33
OPERADORES LINEALES
Matriz (Operador) Hermitian: matriz (operador) cuya adjunta es igual a si misma.Para matrices definidas sobre el campo de los complejos:
Para matrices definidas sobre el campo de los reales:
la matriz es simétrica
*AAA T ==
TAA =

34
ECUACIONES LINEALESLa solución de sistemas de ecuaciones lineales algebraicas simultaneas es una aplicación importante de la teoría de espacios y operadores lineales.La solución de dichos sistemas se puede analizar desde el punto de vista de los espacios vectoriales.Dado un sistema de m ecuaciones con n incógnitas,
mnmnmm
nn
nn
yxaxaxa
yxaxaxayxaxaxa
=+++
=+++=+++
L
M
L
L
2211
22222121
11212111

35
ECUACIONES LINEALESEn notación matricial :
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
mnmnmm
n
n
y
yy
x
xx
aaa
aaaaaa
MM
L
MOMM
L
L
2
1
2
1
21
22221
11211
la anterior relación se puede escribir como Ax = y, donde x ∈ ℜ n, y ∈ ℜ m y A es un operador lineal A: ℜ n → ℜ m
La pregunta: ¿cuantas soluciones existen para este sistema de ecuaciones? es equivalente a: ¿está el vector y en el espacio rango del operador A, R(A)?

36
ECUACIONES LINEALESUna visión adicional se obtiene considerando cada columna de la matriz A como un vector ai en el espacio de m – tuplas ℜ m :
El vector y es una combinación lineal de las columnas de A. Si este es el caso, y conforma un conjunto linealmente dependiente con las columnas de A.
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡++
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
|
|
|
|
|
|
|
|
2211 yxaxaxaAx nnL
El problema se puede reducir a comprobar la independencia lineal de vectores.

37
ECUACIONES LINEALESLa prueba de independencia se realiza formando una nueva matriz aumentada
Si y es dependiente de las columnas de A, entonces el rango de Aes igual al rango de W: ρ(A) = ρ(W) y y ∈ R(A).
[ ]yAW =
ρ(A) = ρ(W) → Existe por lo menos un solución para Ax = y.
Si y es independiente de las columnas de A, entonces el rango de W es igual al rango de A mas uno: ρ(W) = ρ(A) + 1.
Resumiendo
ρ(W) = ρ(A) + 1 → No existe solución para Ax = y.

38
Ecuaciones Lineales
Cuando los rangos son iguales puede existir una solución o un número infinito de soluciones. Todo depende de la relación entre ρ(A) y la dimensión del espacio ℜn o sea n.
Si ρ(A) = n la solución del sistema Ax = y es única:Las columnas de la matriz A son LI y forman una base para ℜn. Como y está en el espacio rango de A, R(A), la representación de y en esta base es única y esta dada por el conjunto de coeficientes xi que se está buscando.

Ecuaciones Lineales
39
Si ρ(A) < n, menos de n columnas de A son LI: el conjunto {ai} aún cubre “span” el subespacio en el cual se encuentra y, pero como hay mas ai de los necesarios para formar una base, la representación de y a partir del conjunto {ai} no es única.¿Por qué existen infinitas soluciones?
La nulidad de la matriz A es:
( ) ( )AnA ρη −=
dado que ρ(A) < n, entonces η(A) > 0.

ECUACIONES LINEALES
40
La nulidad de la matriz corresponde a la dimensión del espacio nulo del espacio correspondiente. Entonces η(A) > 0 implica que el operador A no tiene espacio nulo trivial.Por lo tanto existe al menos un vector x0 tal que Ax0 = 0, con x0 ≠ 0. Además como ℜn es un campo α x0 también es miembro del espacio nulo de A.

41
ECUACIONES LINEALESAdemás a cualquier solución de Ax = y se le puede adicionar un vector del espacio nulo, generando así una solución distinta
( ) yAxAxxAAxxxA ==+=+=+ 000 αα
Como encontrar el Espacio NuloEl espacio nulo se determina fácilmente reduciendo la matriz a la forma triangular superior por medio de las operaciones básicas entre filas.
[ ][ ]
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
××××××××××
0000000000
0000
[x] → Elemento Pivote.

42
ECUACIONES LINEALES
El número de filas LI (no ceros) es igual al rango de la matriz A
Si la matriz A anterior es la matriz del problema Ax = y, entonces
( ) ( ) 336 3 =−=→= AA ηρ
Como los elementos pivote ocurren en las columnas 2, 4 y 5, las variables x2, x4 y x5 se conocen como variables pivote y x1, x3 y x6son las variables libres.

43
ECUACIONES LINEALES
Para obtener una base de N(A) se genera un conjunto de vectores de variables libres LI y se resuelve el sistema de ecuaciones reducidas por filas para las variables pivote.
Los η(A) vectores se generan asumiendo un valor de 1 para una variable libre y cero para las demás, luego se resuelve para las variables pivote.
El procedimiento se repite η(A) veces y de esta forma se genera la base para N(A), y en definitiva N(A) mismo.

ECUACIONES LINEALES
44
Ejemplo: dado el sistema
⎥⎦
⎤⎢⎣
⎡=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎦
⎤⎢⎣
⎡−
−28
021211
3
2
1
xxx
Calculando los rangos de las matrices A y W
[ ] [ ][ ] ⎥
⎦
⎤⎢⎣
⎡ −→⎥
⎦
⎤⎢⎣
⎡−
−==
102108211
20218211
yAW
Entonces ρ(W) = 2

45
ECUACIONES LINEALESPara la matriz A
⎥⎦
⎤⎢⎣
⎡ −→⎥
⎦
⎤⎢⎣
⎡−
−=
210211
021211
A
Entonces ρ(A) = 2
Dado que ρ(A) = ρ(W) = 2 → existe por lo menos una solución.
Dado que ρ(A) = 2 < 3 → existen infinitas soluciones.
La variable libre es x3
46
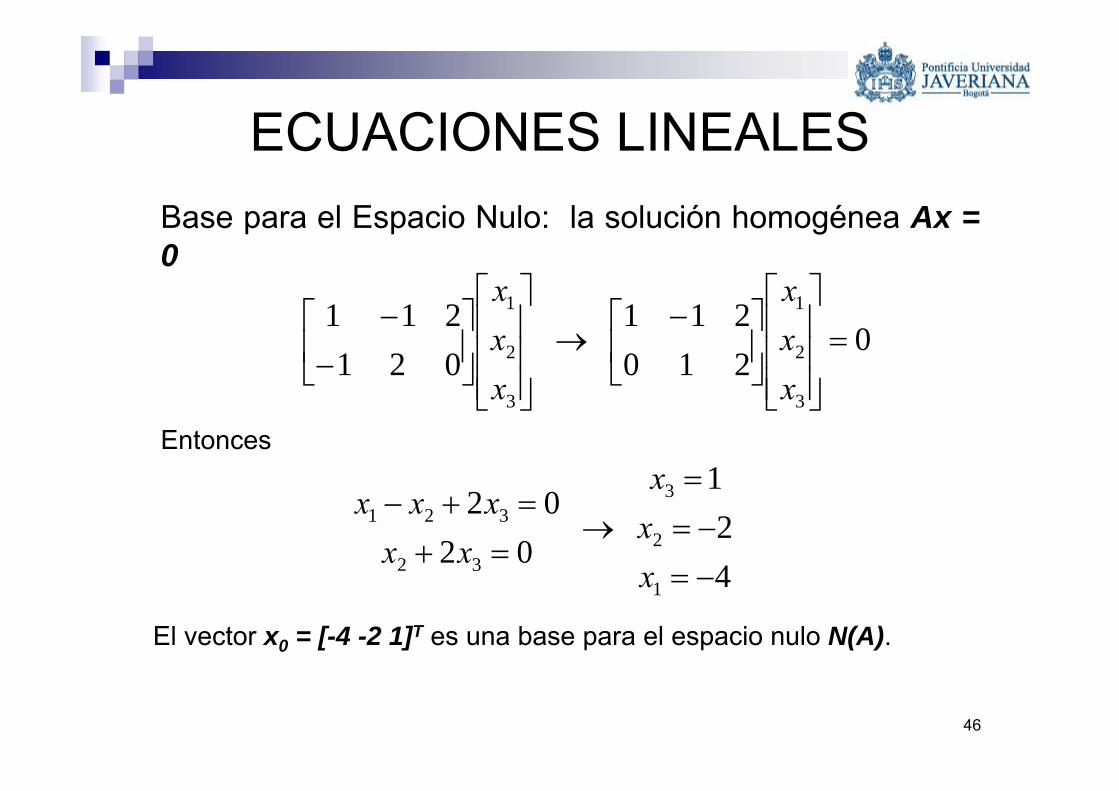
ECUACIONES LINEALESBase para el Espacio Nulo: la solución homogénea Ax = 0
0210211
021211
3
2
1
3
2
1
=⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎦
⎤⎢⎣
⎡ −→
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎦
⎤⎢⎣
⎡−
−
xxx
xxx
Entonces
42
1
0202
1
2
3
32
321
−=−=
=→
=+=+−
xxx
xxxxx
El vector x0 = [-4 -2 1]T es una base para el espacio nulo N(A).

47
ECUACIONES LINEALESLa solución particular: a partir de la forma escalada reducida par W
Se tiene que xP = [18 10 0]T, entonces la solución completa es
18100
102
82
1
2
3
32
321
===
→=+
=+−
xxx
xxxxx
ℜ∈∀⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡−−
+⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=+= ααα ,
124
01018
0xxx P
Si α = 1 se tiene que x = [14 8 1]T.

48
ECUACIONES LINEALESEjemplo: Encontrar la solución de los sistemas, si existe
Se construye W para el primer sistema
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
432
654321
174
123212321
3
2
1
3
2
1
xxx
yxxx
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡−→
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
625.31005.4010
25.21001
112372124321
W
Entonces ρ(A) = ρ(W) = 3 = n → Solución única.
[ ]Tx 625.35.425.21 −=
49
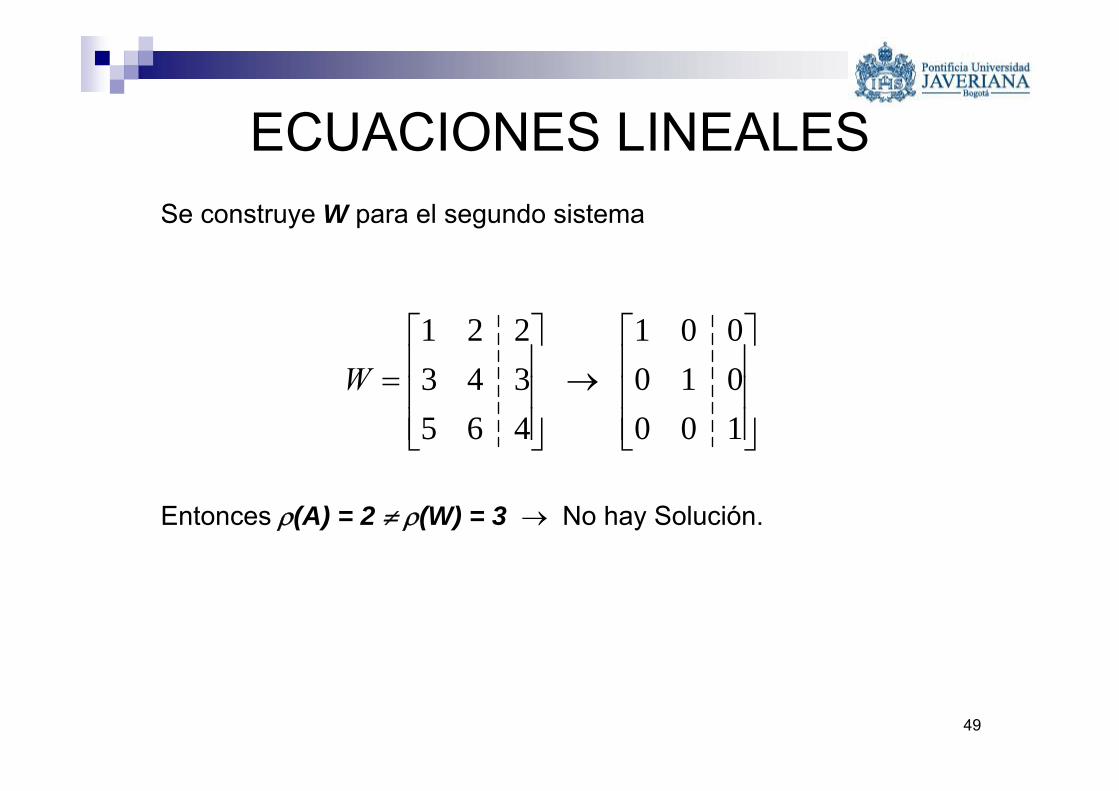
ECUACIONES LINEALESSe construye W para el segundo sistema
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡→
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
100010001
465343221
W
Entonces ρ(A) = 2 ≠ ρ(W) = 3 → No hay Solución.

50
ECUACIONES LINEALES
El caso especial A cuadrada (n x n) y ρ(A) = ρ(W) = n, la única solución se encuentra como
yAx 1−=
como A es de rango completo A-1 existe.

51
ECUACIONES LINEALES
Mas Incógnitas que Ecuaciones (m < n) → Subdeterminado
En este caso no hay una solución única
ρ(A) ≤ min(m,n) = m < n
¿Que criterio se puede emplear para seleccionar una solución?
Si A no es cuadrada hay dos posibilidades: m < n y m > n

ECUACIONES LINEALES
52
Minimizando ½ ||x||2 se minimiza ||x||, de tal forma que el problema se puede plantear como:
Una opción es escoger la solución con la mínima norma, lo cual resulta de gran utilidad cuando el vector xrepresenta una cantidad física con un costo asociado: energía, consumo, costos, señal de control, etc.

53
ECUACIONES LINEALESDe todos los vectores x que son solución encontrar el x que minimice ½xTx, sujeta a la restricción
Ax = y o Ax – y = 0
Para minimizar una función sujeta a una restricción de igualdad se define un multiplicador de LaGrange, γ, para formar la función Hamiltoniano:
( )yAxγxx21H TT −+=
El vector γ de orden (m-1) es una incógnita y se emplea para crear un criterio de óptimización escalar para la expresión vectorial Ax – y.

54
ECUACIONES LINEALES
Hamiltoniano: en mecánica clásica representa la suma de la energía potencial y de la cinética.La restricción se adjunta o adiciona a la función de costo original usando un vector de multiplicadores de Lagrange de dimensión n.

55
ECUACIONES LINEALESMinimizar H sobre todas las x y γ posibles:
( ) γAxγAxAγxH TTT −=→=+=+=∂
∂ 0TT
x
Esta restricción se debe mantener siempre, entonces
definiciónpor 0yAxγHT
=−=∂
∂
( ) yAA γγ AAAxy 1TT −−=→−==
y la solución óptima es
( ) yAAAx γ Ax 1TTopt
T −=→−=

56
ECUACIONES LINEALES
La matriz AAT es cuadrada de dimensiones (m×n)(n×m) = (m×m) y tiene inversa si es de rango completo ρ(AAT) = m.Si ρ(AAT) < m hay ecuaciones que linealmente dependientes y se deben descartar hasta lograr que AAT sea de rango completo.La matriz:
Es una “seudo inversa”, no es única y es una de las soluciones posibles
( ) 1−+ = TT AAAA

57
ECUACIONES LINEALESMas Ecuaciones que Incógnitas (m > n) → Sobredeterminado
Para que la solución exista el vector y (de m componentes) debe expresarse como una combinación lineal de las n columnas de A.
Si ρ(A) = ρ(W) entonces y se puede escribir como una combinación lineal de las columnas de A y existe una solución.
Para determinar dicha solución se define el error
Axye −=
Se buscará una solución x que minimice la mitad de la norma de e, esto es
Hallar x tal que ½ eTe sea mínima y si existe una solución el error deberá ser cero.

58
ECUACIONES LINEALESEntonces
( ) ( )AxyAxyeeT −−= T
21
21
( )( )AxyAxy TTT −−=21
( )AxAxAxyyAxyy TTTTTT +−−=21
Los términos centrales son iguales dado que
( ) escalaresson ademásy AxyyAx TTTT =
Entonces
( )AxAxyA2xyy21ee TTTTTT +−=
21

59
ECUACIONES LINEALESEl mínimo error cuadrático sería
( ) 02221
21
=+−=⎟⎠⎞
⎜⎝⎛
∂∂ AxAyAee TTT
x
Entonces AxAyA TT =
y por lo tanto
( ) yAAAx T1Topt
−=

60
ECUACIONES LINEALESEjemplo: Encuentre la solución del siguiente sistema
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=⎥
⎦
⎤⎢⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
134
012122
2
1
xx
Tenemos que ρ(A) = ρ(W), entonces
( ) ⎥⎦
⎤⎢⎣
⎡=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎦
⎤
⎢⎢⎣
⎡
−
−==
−
11
134
21
210
32
31
31
1 yAAAx TT

61
ECUACIONES LINEALESPara demostrar que la solución es exacta se calcula el error:
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=⎥
⎦
⎤⎢⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡−
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=−=
000
11
012122
134
Axye

62
ECUACIONES LINEALES
Aplicación práctica: encontrar el vector x más cercano a una solución de y = Ax, cuando ρ(A) ≠ ρ(W) y por lo tanto no existe una solución exacta. Objetivo: evaluar el vector que minimiza el error cuadrático. Este vector es la proyección ortogonal de y sobre el subespacio de Rm cubierto (spanned) por las columnas de A.La seudo inversa del caso ya analizado se obtuvo sin asumir error cero, se puede emplear para encontrar MINIMO ERROR CUADRÁTICO

63
ECUACIONES LINEALES
Los datos de un experimento se pueden tabular como:
Cualquier error de medición o ruido hace que ρ(A) ≠ ρ(W)
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
=⎟⎟⎠
⎞⎜⎜⎝
⎛
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
=
=+
=+=+
mmm
mmm
y
yy
xx
aa
aaaa
yxaxa
yxaxayxaxa
2
1
2
1
21
2221
1211
2211
2222121
1212111
Ax
M

64
ECUACIONES LINEALES
El problema exige que el vector y de m componentes sea combinación lineal de solamente DOS vectores.La seudo inversa:
Permite calcular X .La norma del error se calcula como:
( ) T1T AAA −
Axye −=

65
ECUACIONES LINEALES
“Recursive Least Square”:A medida que se repite el experimento el número de filas de la matriz A aumenta.Si el error es muy alto es necesario tomar mas medidas y recalcular la seudo inversa.Para reducir los cálculos se necesita un procedimiento recursivo.

66
ECUACIONES LINEALES
1. Obtener solución básica con k datos:
2. Cuando se toma el dato (k+1) se aumenta la matriz A:
( ) kT
k
1
kT
kk yAAAX−
=
⎥⎦
⎤⎢⎣
⎡=
++
1k
k1k a
AA

67
ECUACIONES LINEALES
3. La nueva seudo inversa:
LEMA: para matrices B, C, D, E dimensionalmente compatibles la siguiente identidad es válida:
( )[ ] [ ]
( ) ( )1
1
1111
+
−
+
−
++
−
++
++=
⎥⎦
⎤⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛⎥⎦
⎤⎢⎣
⎡=
=
k
k
k
kkkkk
y
y
yX
Tk
Tk
1Tk
Tk
TTk
1kTT
k
T1T
ayAaaAA
ya|A
aA
a|A
AAA
( ) ( ) EBDEBCBCBCDEB 1111 −−−− +−=+

68
ECUACIONES LINEALES
Equiparando:
El término enmarcado es igual a:
( ) ( ) ( )[ ] ( )[ ]1k
TT
kTT1
kTk
T1k
Tk
1k
T
Tk
Tk
1
yaA
AAa1aAAaaAAAA
aEIDaC
AAB
k
kk
+
−−−−−
+
−
+
•⎭⎬⎫
⎩⎨⎧ +−=
⇔⇔⇔
⇔
k
k
y
x
11
1
( ) 1−
++ 1kT
1k AA

69
ECUACIONES LINEALES
Se calcula con los valores existentes hasta la muestra k y se emplea para calcular x(k+1)Para cada nueva muestra se debe calcular el escalar:
El término:
Será el término:
Para el siguiente paso
( )[ ] 1−−+ 1aAAa T1
kTk
[ ] 1++ kyTk
Tk ayA
y 1k++T
1kA

70
REFERENCIAS
1. BAY J.S. Fundamentals of Linear State Space Systems. New York: McGraw Hill International Edition. 1999. Chapter 3
2. CHEN C.T. Linear Systems Theory and Design. 3rd Edition. New York: Oxford University Press. 1999. Chapter 3