on the cluster consensus of discrete-time multi-agent systems
TRANSCRIPT

Systems & Control Letters 60 (2011) 517–523
Contents lists available at ScienceDirect
Systems & Control Letters
journal homepage: www.elsevier.com/locate/sysconle
On the cluster consensus of discrete-time multi-agent systemsYao Chen a, Jinhu Lü a,b,∗, Fengling Han c, Xinghuo Yu b
a Institute of Systems Science, Academy of Mathematics and Systems Science, Chinese Academy of Sciences, Beijing 100190, Chinab School of Electrical and Computer Engineering, RMIT University, Melbourne, Vic. 3001, Australiac School of Computer Science and Information Technology, RMIT University, Melbourne, Vic. 3001, Australia
a r t i c l e i n f o
Article history:Received 30 November 2010Received in revised form4 April 2011Accepted 4 April 2011Available online 8 May 2011
Keywords:Multi-agent systemsCluster consensusNonnegative matrixMarkov chain
a b s t r a c t
Nowadays, multi-agent systems (MAS) are ubiquitous in the real world. Consensus is a fundamentalnatural phenomenon. Over the past decade, consensus of MAS has received increasing attention fromvarious disciplines. This paper aims to further investigate a novel kind of cluster consensus of MAS withseveral different subgroups. Based on Markov chains and nonnegative matrix analysis, two novel clusterconsensus criteria are obtained for MAS with fixed and switching topology, respectively. Furthermore,numerical simulations are also given to validate the effectiveness of these proposed criteria. The proposedcluster consensus criteria have some potential applications in real world engineering systems.
© 2011 Elsevier B.V. All rights reserved.
1. Introduction
It is well known that multi-agent systems (MAS) are systemswhich consist of many interacting autonomous agents governedby some local rules [1–10]. MAS are ubiquitous in the real world,such as group robots, self-organized sensor networks, bird flocks,and ant mills [11–20]. To reveal the inherent mechanism ofan MAS, various mathematical or physical models have beenintroduced, including the well-known Vicsek model [1], Boidmodel [2], Couzin–Levin model and its variants [18]. Over thepast few decades, MAS have attracted increasing attention frommany different disciplines, such as mathematics, physics, biology,sociology and engineering science [21–24].
Consensus is a fundamental phenomenon in nature. Over thelast decade, the consensus of MAS has been intensively investi-gated in the engineering sciences [4–9]. Normally, consensus is de-fined as a general agreement among all members of a given groupor community, each of which exercises some discretion in decisionmaking and in its interactions with other agents. In 2003, Jadbabieand colleagues investigated the consensus of the linearized Vicsekmodel [4]. Following this line, there have been numerous resultsreported and several effective approaches proposed over the pastfew years, including reduction to absurdity [6,11], matrix analy-sis [9], convex analysis [16], the construction of Lyapunov func-tions [13], and graph theory [14,15].
∗ Corresponding author at: Institute of Systems Science, AcademyofMathematicsand Systems Science, Chinese Academy of Sciences, Beijing 100190, China.
E-mail address: [email protected] (J. Lü).
0167-6911/$ – see front matter© 2011 Elsevier B.V. All rights reserved.doi:10.1016/j.sysconle.2011.04.009
Recently, the cluster synchronization of complex networks hasaroused wide interest in various disciplines. For example, Wuet al. further explored the cluster synchronization of linearlycoupled complex networks via pinning control in [21]. However,the study of cluster synchronization can be traced back at least tothe cluster synchronization of coupled chaotic oscillators in [22].Inspired by the cluster synchronization phenomenon in complexnetworks, this paper aims to further investigate the clusterconsensus of discrete-time MAS. In the remainder of this paper,cluster consensus will mean that an MAS consists of multiplesubgroups where the consensus can be achieved in each subgroup.In fact, cluster consensus is a more general concept in comparisonwith traditional consensus. Moreover, cluster consensus is also afundamental phenomenon in nature and human society, such asthe cluster formation of personal opinions, the pattern formationof bacteria colonies, and the emergence of subgroups in a flock ofbirds or a school of fish [25–28].
Quite different from the traditional analysis approaches ofMAS,this paper introduces the theory of Markov chains to deal withthe cluster consensus of discrete-time MAS. Based on a simplediscrete-timeMASmodel, it is very interesting to ask the followingtwo challenging fundamental questions for the cluster consensusof a discrete-time MAS: (i) How to determine the clusters in suchan MAS? (ii) What conditions can guarantee the cluster consensusof such an MAS? This paper gives a positive answer to the abovetwo fundamental questions.
The rest of the paper is organized as follows. Section 2 brieflyintroduces several necessary preliminaries on graph theory andnonnegative matrices and formulates the fundamental problem.

518 Y. Chen et al. / Systems & Control Letters 60 (2011) 517–523
Based on the theory of nonnegative matrix analysis and the theoryof Markov chains, several cluster consensus criteria are obtainedin Section 3. In Section 4, numerical simulations are also givento validate the effectiveness of the proposed cluster consensuscriteria. Finally, some concluding remarks are drawn in Section 5.
2. Preliminaries and problem formulation
2.1. Preliminaries on graph theory and nonnegative matrices
Normally, a graph G = {V , E} is defined by two sets V and E ,where V = {1, 2, . . . ,N} is the set of nodes and E ⊆ V × V is theset of edges. For different nodes {is}ks=1 ⊆ V , if (is, is+1) ∈ E foreach 1 ≤ s ≤ k−1, then there exists a path from node i1 to node ikwith length k−1. If (i, i) ∈ E , then there exists a self-loop at node i.For graph G, if there exists at least one path from any node i ∈ V toany node j ∈ V (i = j), then this graph is called strongly connected.Given k graphs Gi = {V , Ei} with the same set of vertices V , theunion of these graphs is defined by
ki=1 Gi = {V ,
ki=1 Ei}.
A matrix A = {aij}Ni,j=1 is called nonnegative if each element aijis nonnegative, denoted by A ≥ 0. A matrix A = {aij}Ni,j=1 is calledpositive if each element aij is positive, denoted by A > 0. A matrixA = {aij}Ni,j=1 is called 0–1 if each element aij is equal to 0 or 1. Amatrix A = {aij}Ni,j=1 is called stochastic if it is nonnegative with∑N
j=1 aij = 1 for any 1 ≤ i ≤ N . For a stochastic matrix A =
{aij}Ni,j=1, its ergodic coefficient is defined by
λ(A) = 1 − mini=j
N−k=1
min{aik, ajk}. (1)
Clearly, λ(A) = 0 if and only if any two rows of A are equal.Furthermore, λ(·) is continuous with respect to all entries of A.Given a sequence of stochasticmatrices {Ai}
ni=1, then its left product
is defined byn∏
i=1
Ai = An · · · A2A1.
For any nonnegative matrix A, a corresponding graph G(A) =
{V , E} can be constructed by (j, i) ∈ E if and only if aij > 0.Given a strongly connected graph G = {V , E}, for any node
i ∈ V , denote the set of the paths starting from node i to itselfby {pki }
∞
k=1, and the lengths of these paths by {lki }∞
k=1. Let di =
gcd{pki }∞
k=1 be the period of node i, where gcd is the abbreviation ofgreatest common divisor. Then one has the following proposition.
Proposition 1. For a strongly connected graph G = {V , E}, theperiods of all nodes are the same.
Based on the above proposition, a definition is then given asfollows.
Definition 1. The period of a strongly connected graphG = {V , E}
is defined to be the period of any node i ∈ V .
Proposition 2. Consider a strongly connected graph G = {V , E}
with period d, for any two nodes i, j ∈ V , let l and l′ be the lengthsof any two paths from node i to node j, then l ≡ l′( mod d).
Consequently, a cluster factorization algorithm is then given asfollows.
Algorithm 1. Given a strongly connected graph G = {V , E}
with period d. Then one can construct d sets {Vr}d−1r=0 satisfying
Vr1
Vr2 = ∅ for ∀r1 = r2 andd−1
r=0 Vr = V according to thefollowing procedure:
For a given node i ∈ V and any other node j ∈ V , let the lengthof a path from node i to node j be dj. If dj ≡ r( mod d), then onehas j ∈ Vr for r ∈ {0, 1, . . . , d − 1}.
Fig. 1. A graph with 3 clusters.
Here, it should be emphasized that the set {Vr}d−1r=0 is indepen-
dent of the selection of node i in Algorithm 1. This can be derivedfrom the following proposition.
Proposition 3. For a strongly connected graph G = {V , E}, let{Vr}
d−1r=0 be the sets obtained from Algorithm 1 for the given node i.
Suppose that j1, j2 ∈ Vr , and l1, l2 be the lengths of two paths fromsome node i∗ ∈ V (=i) to j1, j2, respectively. Then one has l1 ≡
l2( mod d).
Without loss of generality, assume that 1 ∈ V0 for Algorithm 1.Note that, if there exists a self-loop at some node of a stronglyconnected graph G, then the period of this graph is 1. In this case,G is an aperiodical graph. This can be summarized in the followingproposition.
Proposition 4. A strongly connected graph G = {V , E} with a self-loop has a period of 1.
For two strongly connected graphs G1 and G2 with the sameperiod d, let the sets derived from Algorithm 1 be {V 1
i }d−1i=0 and
{V 2i }
d−1i=0 , respectively. If V
1i = V 2
i for 0 ≤ i < d, then G1 is similarto G2.
A sequence of graphs {Gk}∞
k=0 is called jointly connected if thereexists a subsequence of natural numbers {ki}∞i=1 such that 1 ≤
ki+1 − ki ≤ K and eachki+1−1
k=kiGk is strongly connected.
2.2. The canonical form of irreducible nonnegative matrix
For a nonnegative matrix A, suppose that G(A) is stronglyconnected with the period d. According to Algorithm 1, one candetermine the above d sets {Vr}
d−1r=0 satisfying Vi
Vj = ∅ for
any i = j andd−1
r=0 Vr = V . Then one can rearrange the indicesof matrix A from the orders of V0, V1, . . . , Vd−1. Thus one obtainsmatrix A. The following example illustrates the detailed procedure.Let
A =
0 0 1 0 1 01 0 0 0 0 10 1 0 1 0 01 0 0 0 0 00 1 0 1 0 00 0 0 0 1 0
.
Fig. 1 shows the graph G(A) with 3 clusters.Consider the chain 1 → 4 → 5 → 6 → 2 → 3 → 1.
Since graph G(A) has a period of 3, then one can set that V0 =
{1, 6}, V1 = {2, 4}, and V2 = {3, 5}. By recombining the indicesof A, one gets
A = PTAP,

Y. Chen et al. / Systems & Control Letters 60 (2011) 517–523 519
where P = (e7,1, e7,6, e7,2, e7,4, e7,3, e7,5) and eN,i are the N × 1column vectors whose ith entries are 1 and whose other entriesare 0.
By using simple calculations, one has
A =
0 0 0 0 1 10 0 0 0 0 11 1 0 0 0 01 0 0 0 0 00 0 1 1 0 00 0 1 1 0 0
.
In fact, for a general nonnegative matrix A with period d, onecan factorize its indices into d subgroups {Vr}
d−1r=0 and then do
permutation transformation from the order of those indices inV0, V1, . . . , Vd−1. Thus, matrix A is similar to some matrix A =
PTAP with the algebraic form
A =
0 0 0 0 Cd−1C0 0 0 0 00 C1 0 0 0
0 0. . . 0 0
0 0 0 Cd−2 0
, (2)
where Ci is a |Vi+1| × |Vi| matrix for 0 ≤ i ≤ d − 2, Cd−1 is a|V0| × |Vd−1| matrix, and P is a permutation matrix. Let A be thecanonical form of A.
2.3. Problem formulation
Consider anMAS consisting ofN autonomous agents andwherexi(t) denotes the state of agent i at time t . Then the updating ruleof MAS is described by
xi(t + 1) =
N−j=1
aij(t)xj(t), (3)
where the weights {aij(t)} satisfy the following assumptions.
Assumption 1.∑N
j=1 aij(t) = 1, aij(t) ≥ 0 for any i, j ∈ V , andinfaij(t)=0 aij(t) ≥ α with α ∈ (0, 1).
Assumption 2. G(A(t)) is fixed and strongly connected.
Assumption 1 implies that each agent will update its state fromthe states of its neighbors. In the following, one focuses on thecluster consensus of (3).
Definition 2. For MAS (3), if there exists k different sets {Vr}k−1r=0
with Vi
Vj = ∅ for ∀i = j andk−1
r=0 Vr = V , such that
limt→∞
|xi(t) − xj(t)| = 0, ∀i, j ∈ Vr ,
then MAS (3) achieves cluster consensus.
Denote x(t) = (x1(t), x2(t), . . . , xN(t))T , then MAS (3) can berewritten asx(t + 1) = A(t)x(t)where A(t) = (aij(t))Ni,j=1. In this case, the property of MAS (3) canbe attributed to the property of matrix A(t). Assumption 1 impliesthat A(t) is a stochastic matrix. To realize the cluster consensusof MAS (3), one needs to resolve the following two fundamentalproblems.
Problem 1. How to determine the clusters in the MAS (3)?
Problem 2. What kind of conditions can guarantee the clusterconsensus of MAS (3)?
Note that the switching topologies can be introduced when allclusters of MAS (3) are predetermined. Before the statement of themain results, several necessary assumptions are given as follows.
Assumption 3. Each G(A(t)) is strongly connected and has aperiod of d and |V | = nd. There exists a permutationmatrix P suchthat
PTA(t)P =
0 0 0 0 Cd−1(t)
C0(t) 0 0 0 00 C1(t) 0 0 0
0 0. . . 0 0
0 0 0 Cd−2(t) 0
, (4)
where each Ci(t) ∈ Rn×n is nonsingular.
Assumption 4. Ci(t) is positive diagonal for any 0 ≤ i < d andt ≥ 1.
Assumption 5. The sequence of graphs {Cki(t)(t)}∞
t=1 is jointlyconnected for i = 0, 1, . . . , d − 1, where 0 ≤ ki(t) < d andki(t) ≡ t + i − 1( mod d).
3. Main results
To begin with, several necessary lemmas are given in thefollowing.
Lemma 1. Consider a sequence of positive integers {ki}∞i=1 satisfying∀kξ , kη ∈ {ki}∞i=1 ⇒ kξ + kη ∈ {ki}∞i=1. If gcd{ki}∞i=1 = 1, then thereexists some N∗ such that k ∈ {ki}∞i=1 holds for any k ≥ N∗.
Proof. Denote dr = gcd{ki}ri=1. Obviously, dr is monotonous de-creasing with respect to r . Since d∞ = 1, there exists some integerD satisfying gcd{ki}Di=1 = 1. Moreover, there exist integers {ci}Di=1such thatD−
i=1
ciki = 1.
That is, one has−ci>0,i≤D
ciki +−
ci<0,i≤D
ciki = 1.
Denote
D1 =
−ci>0,i≤D
ciki, D2 = −
−ci<0,i≤D
ciki, N∗= D2
2.
For any k ≥ N∗, one gets
k = p · D2 + q,
where p ≥ D2 and 0 ≤ q < D2.Therefore, one obtains
k = p · D2 + q(D1 − D2) = (p − q)D2 + qD1.
Since D1,D2 ∈ {ki}∞i=1, then k ∈ {ki}∞i=1. �
Lemma 2 ([23]). For any two stochastic matrices A1 and A2, one has
λ(A1A2) ≤ λ(A1)λ(A2),
where λ(·) is the ergodic coefficient defined in (1).
Lemma 3. For a sequence of stochastic matrices {A(t)} = {aij(t)}Ni,j=1, suppose that Assumption 1 holds. If
limp→∞
λ
p∏
t=1
A(t)
= 0,

520 Y. Chen et al. / Systems & Control Letters 60 (2011) 517–523
then there exists some ξ with ξ ≥ 0 and ξ T1 = 1, such that
limp→∞
p∏t=1
A(t) = 1ξ T .
Proof. Denote
Cp = A(p) · · · A(2) · A(1) = 1ξ Tp + Rp,
where the ith element of ξp is the average of all entries in the ithcolumn of Cp. Hence, there exists P∗ such that ‖Rp‖∞ ≤
ε2 for any
p ≥ P∗.Moreover, one has
Cp+s = 1ξ Tp + A(p + s) · · · A(p + 1)Rp.
That is, for any p ≥ P∗, one gets
‖Cp+s − Cp‖∞ ≤ ‖I − A(p + s) · · · A(p + 1)‖∞ · ‖Rp‖∞ ≤ ε.
Therefore, Cp is convergent. Denote limp→∞ Cp = C∗.Since limp→∞ λ(Cp) = 0 and C∗ is stochastic, then Lemma 3
holds. Thus the proof is completed here. �
Lemma 4. For a sequence of stochasticmatrices {A(t)} = {aij(t)}Ni,j=1,suppose that Assumptions 1 and 2 hold. B denotes a 0–1 matrix cor-responding to the fixed topology in Assumption 2. If there exists someinteger N∗ > 0 satisfying BN∗
> 0, then
limp→∞
p∏t=1
A(t) = 1ξ T ,
where ξ ≥ 0 and ξ T1 = 1.
Proof. According to Assumption 1, A(t) ≥ αB for any t ≥ 1.Moreover, for any k ≥ 0, one has
A((k + 1)N∗) · · · A(kN∗+ 2)A(kN∗
+ 1) ≥ αN∗
BN∗
≥ αN∗
11T .
Let
Bk = A((k + 1)N∗) · · · A(kN∗+ 2)A(kN∗
+ 1).
From the definition of λ(·), one gets
λ(Bk) ≤ 1 − NαN∗
< 1.
Denote q = pN∗
, then one obtains
λ
p∏
t=1
A(t)
≤ λ
q∏
t=1
Bt−1
≤ (1 − NαN∗
)q.
Let p → ∞ on both sides of the above inequality, then one haslimp→∞ λ
∏pt=1 A(t)
= 0. By Lemma 3, the result of Lemma 4
holds. Thus the proof is completed. �
Remark 1. In particular, it should be pointed out that the strongconnectedness of G(A) does not imply the existence of N∗ andAN∗
> 0 for a nonnegative matrix A. For example, the matrix
A =
0 1 00 0 11 0 0
is a typical counterexample.
Theorem 1. If Assumptions 1 and 2 hold for MAS (3), then theMAS (3) can reach cluster consensus and these clusters can beseparated from each other by using Algorithm 1. Moreover, thenumber of clusters is equal to the period of G(A(t)).
Proof. Let A(t) = PTA(t)P be the canonical form (2) of A(t). Usingsimple computation, one has(k+1)d∏t=kd+1
A(t) = diag{A0(k), A1(k), . . . , Ad−1(k)},
where
Ai(k) = Ci−1((k + 1)d) · · · C1((k + 1)d − i + 1)Cd−1((k + 1)d − i)· · · Ci+1(kd + 2)Ci(kd + 1),
C−1(·) = Cd−1(·), and Cd(·) = C0(·). Clearly, each Ai(k) is a |Vi|×|Vi|
square matrix.Consider all paths starting from Vi and ending at Vi in G(A(t)).
According to Algorithm 1, since the length of any one of thesepaths is a multiple of d, then G(Ai(k)) is strongly connected. Let thelengths of these paths be {kid}∞i=1. From the strong connectednessof G(A(t)), one has
∀kξd, kηd ∈ {kid}∞i=1 ⇒ kξd + kηd ∈ {kid}∞i=1.
Since the period of G(A(t)) is d, then one gets gcd{ki}∞i=1 = 1.By Lemma 1, there exists some N∗ satisfying p ∈ {ki}∞i=1 for anyp ≥ N∗.
Let Ai be the 0–1 matrix corresponding to Ai(k). For p ≥ N∗,then one has
Api > 0.
According to Lemma 4,∏
∞
k=1 Ai(k) is convergent and let
limp→∞
p∏k=1
Ai(k) = 1ηTi ,
where ηi is a nonnegative column vector satisfying 1Tηi = 1.Therefore, one obtains
limk→∞
kd∏t=1
A(t) = diag{1ηT0 , 1η
T1 , . . . , 1η
Td−1}.
Denote PT x(1) = (xT0, xT1, . . . , x
Td−1)
T , where xi are |Vi| × 1column vectors. Since Ci(t) is stochastic, for any 0 ≤ i < d, onehas
limk→∞
kd+i∏t=1
A(t)x(1) = limk→∞
Pkd+i∏t=1
A(t)PT x(1)
= P(γd−i1T , γd−i+11T , . . . , γd−11T , . . . , γd−i−11T )T ,
where γi = ηTi xi for any i ∈ V , ηd = η0, η−1 = ηd−1, xd = x0 and
x−1 = xd−1. Thus the proof is completed. �
Remark 2. Based on the proof of Theorem 1, one knows that theperiodic trajectory γ0 → γ1 → · · · → γd−1 → γ0 can be viewedas the consensus trajectory of each agent. That is, it correspondsto the static consensus value in the traditional consensus problem.Thus, there exists some ri ∈ [0, d) for each i ∈ V and
lims→∞
d−1−k=0
‖xi(ds + ri + k) − γk‖ = 0.
Furthermore, if ri = rj, then nodes i and j are in the same cluster.Since one can choose initial values xi and xj(i = j) to make γi = γj,one knows that for two nodes ni ∈ Vi and nj ∈ Vj, there exists someinitial value x(1) such that
lim inft→∞
‖xni(t) − xnj(t)‖ > 0.
Remark 3. In fact, G(A(t)) is not necessarily strongly connectedfor the case of fixed topology in Theorem 1. Moreover, thestrong connectedness can be weakened to that G(A(t)) contains a
Y. Chen et al. / Systems & Control Letters 60 (2011) 517–523 521
(a) y1(t), y2(t), y3(t). (b) x1(t) and x6(t).
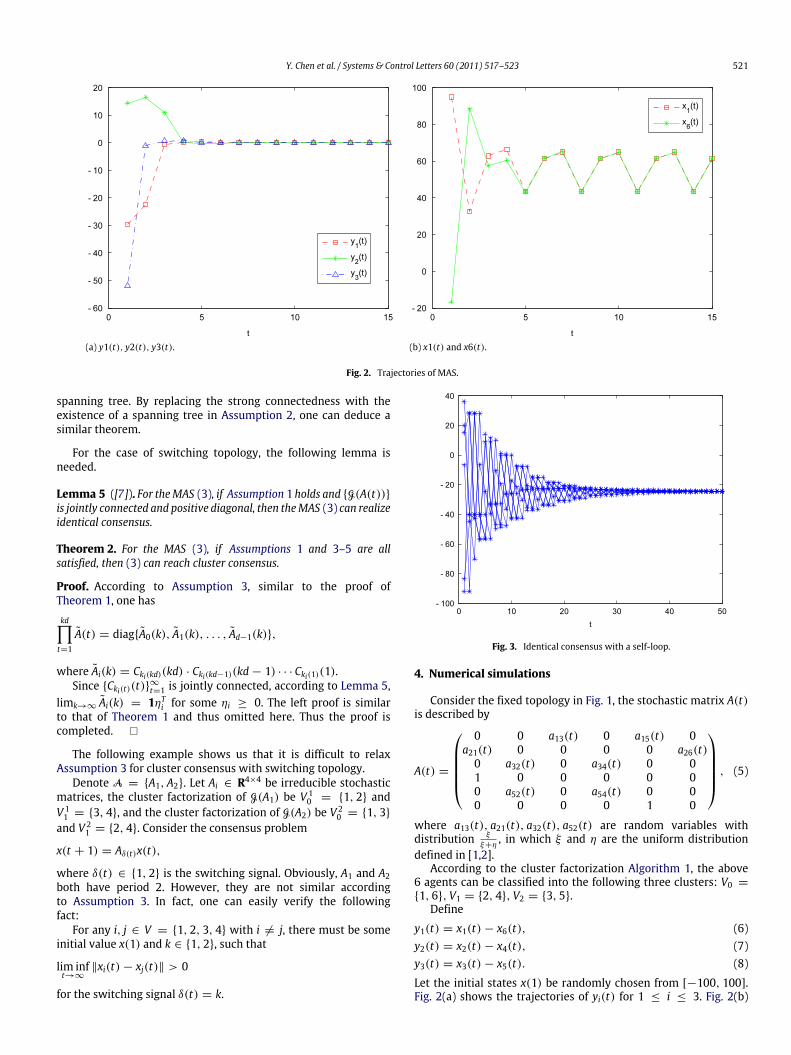
Fig. 2. Trajectories of MAS.
spanning tree. By replacing the strong connectedness with theexistence of a spanning tree in Assumption 2, one can deduce asimilar theorem.
For the case of switching topology, the following lemma isneeded.
Lemma 5 ([7]). For theMAS (3), if Assumption 1 holds and {G(A(t))}is jointly connected and positive diagonal, then theMAS (3) can realizeidentical consensus.
Theorem 2. For the MAS (3), if Assumptions 1 and 3–5 are allsatisfied, then (3) can reach cluster consensus.
Proof. According to Assumption 3, similar to the proof ofTheorem 1, one haskd∏t=1
A(t) = diag{A0(k), A1(k), . . . , Ad−1(k)},
where Ai(k) = Cki(kd)(kd) · Cki(kd−1)(kd − 1) · · · Cki(1)(1).Since {Cki(t)(t)}
∞
t=1 is jointly connected, according to Lemma 5,limk→∞ Ai(k) = 1ηT
i for some ηi ≥ 0. The left proof is similarto that of Theorem 1 and thus omitted here. Thus the proof iscompleted. �
The following example shows us that it is difficult to relaxAssumption 3 for cluster consensus with switching topology.
Denote A = {A1, A2}. Let Ai ∈ R4×4 be irreducible stochasticmatrices, the cluster factorization of G(A1) be V 1
0 = {1, 2} andV 11 = {3, 4}, and the cluster factorization of G(A2) be V 2
0 = {1, 3}and V 2
1 = {2, 4}. Consider the consensus problem
x(t + 1) = Aδ(t)x(t),
where δ(t) ∈ {1, 2} is the switching signal. Obviously, A1 and A2both have period 2. However, they are not similar accordingto Assumption 3. In fact, one can easily verify the followingfact:
For any i, j ∈ V = {1, 2, 3, 4} with i = j, there must be someinitial value x(1) and k ∈ {1, 2}, such that
lim inft→∞
‖xi(t) − xj(t)‖ > 0
for the switching signal δ(t) = k.
Fig. 3. Identical consensus with a self-loop.
4. Numerical simulations
Consider the fixed topology in Fig. 1, the stochastic matrix A(t)is described by
A(t) =
0 0 a13(t) 0 a15(t) 0
a21(t) 0 0 0 0 a26(t)0 a32(t) 0 a34(t) 0 01 0 0 0 0 00 a52(t) 0 a54(t) 0 00 0 0 0 1 0
, (5)
where a13(t), a21(t), a32(t), a52(t) are random variables withdistribution ξ
ξ+η, in which ξ and η are the uniform distribution
defined in [1,2].According to the cluster factorization Algorithm 1, the above
6 agents can be classified into the following three clusters: V0 =
{1, 6}, V1 = {2, 4}, V2 = {3, 5}.Define
y1(t) = x1(t) − x6(t), (6)y2(t) = x2(t) − x4(t), (7)y3(t) = x3(t) − x5(t). (8)
Let the initial states x(1) be randomly chosen from [−100, 100].Fig. 2(a) shows the trajectories of yi(t) for 1 ≤ i ≤ 3. Fig. 2(b)

522 Y. Chen et al. / Systems & Control Letters 60 (2011) 517–523
(a) t = 2k. (b) t = 2k + 1.
Fig. 4. Switching topology of MAS.
Fig. 5. Cluster consensus with switching topology.
shows the trajectories of x1(t) and x6(t) in the first cluster foranother initial states x(1). Obviously, the two agents x1(t) and x6(t)can quickly achieve consensus.
Furthermore, if a self-loop is introduced to any node of G(A(t))in Fig. 1, according to Proposition 4, then the period of this graphis 1 and all 6 agents can achieve identical consensus. Suppose thatnode 4 has a self-loop and A(t) is given by
A(t) =
0 0 a13(t) 0 a15(t) 0
a21(t) 0 0 0 0 a26(t)0 a32(t) 0 a34(t) 0 0
a41(t) 0 0 a44(t) 0 00 a52(t) 0 a54(t) 0 00 0 0 0 1 0
,
where a41(t) is a random variable with the same PDF of a13(t) anda44(t) = 1 − a41(t). Fig. 3 shows the trajectories of all 6 agents.
Hereafter, the switching topology will be considered. Fig. 4shows two typical graphswith different topological structures. It iseasy to verify that the above two graphs satisfy Assumptions 3–5.Take the same definitions (6)–(8), then the trajectories of yi(t)with1 ≤ i ≤ 3 are shown in Fig. 5. Clearly, the above MAS achieves thecluster consensus.
5. Concluding remarks
This paper has further investigated the cluster consensusof a discrete-time MAS with several different subgroups. Twocluster consensus criteria are deduced for the discrete-time MAS
with fixed and switching topology by using Markov chains andnonnegative matrix analysis, respectively. Moreover, numericalsimulations are also given to verify the effectiveness of theproposed criteria. It sheds some light on the potential engineeringapplications for the proposed theoretical analysis approaches andcluster consensus criteria.
Acknowledgments
This work was supported by the National Natural ScienceFoundation of China under Grants 60821091, 60772158, 11072254and 61025017, the National Basic Research (973) Program of Chinaunder Grant 2007CB310805, and the Australian Research CouncilFuture Fellowships under Grant FT0992226 and Discovery Schemeunder Grant DP0986376.
Appendix
A.1. Proof of Proposition 1
Consider two different nodes i1, i2 ∈ V with periods d1 and d2,respectively. Let {lkd1}∞k=1 be the lengths of all paths from node i1to itself, and l be the length of a circle in Gwith nodes i1 and i2 bothcontained in it.
According to Lemma 1, there exists some p such that lpd1, (lp +
1)d1 ∈ {lkd1}∞k=1. Since there exist two paths starting from i2 to i2with lengths l + lpd1 and l + (lp + 1)d1, respectively, then one has
d2 | l + lpd1, d2 | l + (lp + 1)d1.
Hence, one obtains d2 | d1.Similarly, one deduces d1 | d2. Therefore, one gets d1 = d2. �
A.2. Proof of Proposition 2
Suppose that a path from j to i has a length of l′′, then thereexist two paths from node i to itself with lengths l + l′′ and l′ + l′′,respectively. According to the definition of period, one has
d | l + l′′, d | l′ + l′′.
Therefore, d | l − l′. This completes the proof. �
A.3. Proof of Proposition 3
For a path from node i to node i∗ with length l, suppose that twopaths starting from node i to nodes j1, j2 have the lengths l′1 and l′2,respectively. Hence, there exist two paths starting from node i tonodes j1, j2 with lengths l + l1 and l + l2, respectively. From the

Y. Chen et al. / Systems & Control Letters 60 (2011) 517–523 523
definition of Vr , one has
l′1 ≡ l′2( mod d).
At the same time, according to Proposition 2, one gets
l + l1 ≡ l′1( mod d), l + l2 ≡ l′2( mod d).
Therefore, one obtains
l1 ≡ l2( mod d).
Thus the proof is completed here. �
A.4. Proof of Proposition 4
Suppose that a self loop is introduced to node i, then the lengthsof all paths starting from node i to itself are given by {k}∞k=1.According to the definition of period of a graph, Proposition 4holds.Thus the proof is completed. �
References
[1] T. Vicsek, A. Czirok, E. Ben-Jacob, I. Cohen, O. Sochet, Novel type of phasetransition in a system of self-propelled particles, Physical Review Letters 75(6) (1995) 1226–1229.
[2] C.W. Reynolds, Flocks, herds, and schools: a distributed behavior model,Computer Graphics 21 (4) (1987) 25–34.
[3] J. Wolfowitz, Products of indecomposable, aperiodic, stochastic matrices,Proceedings of the American Mathematical Society 14 (5) (1963) 733–737.
[4] A. Jadbabie, J. Lin, A.S. Morse, Coordination of groups of mobile autonomousagents using nearest neighbor rules, IEEE Transactions on Automatic Control48 (6) (2003) 988–1001.
[5] M. Cao, A.S. Morse, B.D.O. Anderson, Agreeing asynchronously, IEEE Transac-tions on Automatic Control 53 (8) (2008) 1826–1838.
[6] A.V. Savkin, Coordination collective motion of groups of autonomous mobilerobots: analysis of Vicsek’s model, IEEE Transactions on Automatic Control 49(6) (2004) 981–983.
[7] V.D. Blondel, J.M. Hendrickx, A. Olshevsky, J.N. Tsitsiklis, Convergence inmultiagent coordination, consensus, and flocking, in: Proceedings of the 44thIEEE Conference on Decision and Control and European Control Conference2005, Seville, Spain, December 2005, pp. 2996–3000.
[8] Y. Chen, J. Lü, Z. Lin, Consensus of discrete-time multi-agent systems withnonlinear local rules and time-varying delays, in: Proceedings of the 48th IEEEConference on Decision and Control and 28th Chinese Control Conference,Shanghai, China, December 2009, pp. 7018–7023.
[9] W. Ren, R.W. Beard, Consensus seeking in multiagent systems underdynamically changing interaction topologies, IEEE Transactions on AutomaticControl 50 (5) (2005) 655–661.
[10] D. Angeli, P.A. Bliman, Convergence speed of unsteady distributed consensus:decay estimate along the settling spanning-trees, SIAM Journal on Control andOptimization 48 (1) (2009) 1–32.
[11] S. Li, H. Wang, Multi-agent coordination using nearest-neighbor rules:revisiting the Vicsek model, arXiv:cs/0407021.
[12] W. Guo, S. Chen, J. Lü, X. Yu, Consensus of multi-agent systems with an activeleader and asymmetric adjacency matrix, in: Proceedings of the 48th IEEEConference on Decision and Control and 28th Chinese Control Conference,Shanghai, China, December 2009, pp. 3697–3702.
[13] J. Lü, G. Chen, A time-varying complex dynamical network models and itscontrolled synchronization criteria, IEEE Transactions on Automatic Control50 (6) (2005) 841–846.
[14] M. Cao, A.S. Morse, B.D.O. Anderson, Reaching a consensus in a dynamicallychanging environment: convergence rates, measurement delays, and asyn-chronous events, SIAM Journal on Control and Optimization 47 (2) (2008)601–623.
[15] M. Cao, A.S. Morse, B.D.O. Anderson, Reaching a consensus in a dynamicallychanging environment: a graphical approach, SIAM Journal on Control andOptimization 47 (2008) 575–600.
[16] L. Moreau, Stability of multiagent systems with time-dependent com-munication links, IEEE Transactions on Automatic Control 50 (2) (2005)169–182.
[17] F. Xiao, L. Wang, State consensus of multi-agent systems with switchingtopologies and time-varying delays, International Journal of Control 79 (10)(2006) 1277–1284.
[18] J. Lü, J. Liu, I.D. Couzin, S.A. Levin, Emerging collective behaviors of animalgroups, in: Proceedings of the 7th World Congress on Intelligent Control andAutomation, Chongqing, China, June 2008, pp. 1060–1065.
[19] J. Lü, X. Yu, G. Chen, D. Cheng, Characterizing the synchronizability of small-world dynamical networks, IEEE Transactions on Circuits and Systems I 51 (4)(2004) 787–796.
[20] H. Liu, J. Lu, J. Lü, D.J. Hill, Structure identification of uncertain generalcomplex dynamical networks with time delay, Automatica 45 (8) (2009)1799–1807.
[21] W.Wu,W. Zhou, T. Chen, Cluster synchronization of linearly coupled complexnetworks under pinning control, IEEE Transactions on Circuits and Systems I56 (4) (2009) 829–839.
[22] N.B. Vladimir, V.B. Igor, M. Erik, Cluster synchronizationmodes in an ensembleof coupled chaotic oscillators, Physical Review E 63 (3) (2001) 036216.
[23] F. Xiao, L. Wang, A. Wang, Consensus problems in discrete-time multiagentsystems with fixed topology, Journal of Mathematical Analysis and Applica-tions 322 (2) (2006) 587–598.
[24] F. Xiao, L. Wang, Asynchronous consensus in continuous-time multi-agentsystems with switching topology and time-varying delays, IEEE Transactionson Automatic Control 53 (8) (2008) 1804–1816.
[25] J. Zhou, J.A. Lu, J. Lü, Pinning adaptive synchronization of a general complexdynamical network, Automatica 44 (4) (2008) 996–1003.
[26] E. Seneta, NonnegativeMatrices andMarkov Chains, Springer, NewYork, 2006.[27] R.A. Horn, C.R. Johnson, Matrix Analysis, Cambridge University Press,
Cambridge, 1986.[28] J. Zhou, J.A. Lu, J. Lü, Adaptive synchronization of an uncertain complex
dynamical network, IEEE Transactions on Automatic Control 51 (4) (2006)652–656.