on random event detection with wireless sensor networksprabal/pubs/masters/dutta04... · on random...
TRANSCRIPT

ON RANDOM EVENT DETECTION
WITH WIRELESS SENSOR NETWORKS
A Thesis
Presented in Partial Fulfillment of the Requirements for
the Degree Master of Science in the
Graduate School of The Ohio State University
By
Prabal Kumar Dutta, B.S.E.C.E.
* * * * *
The Ohio State University
2004
Master’s Examination Committee:
Anish K. Arora, Adviser
Steven B. Bibyk, Adviser
Benjamin A. Coifman
Approved by
Adviser
Department of Electricaland Computer Engineering

c© Copyright by
Prabal Kumar Dutta
2004

ABSTRACT
Wireless sensor networks hold great promise as an enabling technology for a variety
of applications. Data collection and event detection are two such classes of applica-
tions that are broadly representative and which have received considerable attention
in the literature. While wireless multi-hop data collection has achieved operational
lifetimes on the order of a year, we are unaware of lifetimes exceeding a few days or
weeks for wireless multi-hop event detection sensor networks.
Our thesis is that sensor networks for event detection are constrained by two fac-
tors which do not similarly affect data collection sensor networks. The first factor is
that no appropriate sensing, signal conditioning, and signal processing architecture
has been broadly implemented to support event detection in distributed systems that
are simultaneously energy, space, time, and message complexity-constrained. The
second factor is that middleware for services such as time synchronization, localiza-
tion, and routing are predominantly and unnecessarily proactive. A comparison of
data collection and event detection will serve to illustrate the subtle but important
differences between these applications.
Fundamentally, data collection is a signal reconstruction problem in which the
objective is to centrally reconstruct observations of distributed phenomena with high
spatial and temporal fidelity. Performance metrics for such applications include the
ii

accuracy and precision of the signal reconstruction, the correlation between the ob-
served signal and the underlying physical phenomena, and the lifetime of the sensor
network. Physical phenomena such as light, temperature, humidity, and barometric
pressure change at very low frequencies and can be sampled faithfully at periods of
a minute or more. System performance can be adjusted by introducing compression
and aggregation, or by varying the duty-cycle, sampling and communication rates,
allowing sensor lifetimes to approach a year or more.
In contrast with data collection, sensor network applications for event detection
must continuously observe noise for the rare presence of a burst of high-frequency
signal. The requirements for this style of event detection, called “passive vigilance,”
imply a sensing, signal conditioning, and signal processing architecture quite different
from that employed for the data collection problem. Fundamentally, event detection is
a signal detection problem in which the objective is to decide between two hypotheses,
or more generally a parameter estimation and pattern classification problem in which
the objective is to extract feature vectors from the signals and assign class labels to
the observed events. Performance metrics for such applications include probabilities
of detection, false alarm, classification and mis-classification, detection latency, and
lifetime of the sensor network. For many types of targets, the signals of interest may
be present for durations on the order of a second and with spectral content ranging
from 1Hz to 10kHz.
This thesis addresses the problem of how sensor networks for event detection can
exhibit lifetimes comparable to sensor networks for data collection when the former
must monitor much higher frequency signals than the latter. Part of the solution
lies the relative rates of sampling and communications and part of the solution lies
iii

in rearchitecting the sensing and signal processing hardware and software for hierar-
chical detection with always-on, low-power wakeup sensors occupying the lowest tier.
Such an architecture extends the event-centric approach into analog electronics and
augments sampling-based digital signal processing with an interrupt-driven trigger.
This work draws on experiences from one short-lived, medium scale, event detecting
sensor network implementation to design the sensing, signal conditioning, and sig-
nal processing architecture and make middleware recommendations for a long-lived,
extremely large scale, event detecting sensor network.
This thesis considers wireless sensor node design issues broadly and the sensing
and signal processing required for passive vigilance more deeply. Analysis, design,
and simulation of several generations of motes and sensorboards is presented, and
the case for a new platform is made largely on the basis of sensing and reliabil-
ity needs. Requirements representative of typical intrusion detection systems are
discussed. Sample target phenomenologies for civilians, soldiers, and vehicles are
developed. Packaging considerations are discussed. Detailed schematics, drawings,
and datasets are provided in the hope that the contributions of this thesis provide a
foundation to accelerate the development of future sensor network platforms.
iv

ON RANDOM EVENT DETECTION
WITH WIRELESS SENSOR NETWORKS
By
Prabal Kumar Dutta, M.S.
The Ohio State University, 2004
Anish K. Arora, Adviser
Steven B. Bibyk, Adviser
Wireless sensor networks hold great promise as an enabling technology for a variety
of applications. Data collection and event detection are two such classes of applica-
tions that are broadly representative and which have received considerable attention
in the literature. While wireless multi-hop data collection has achieved operational
lifetimes on the order of a year, we are unaware of lifetimes exceeding a few days or
weeks for wireless multi-hop event detection sensor networks.
Our thesis is that sensor networks for event detection are constrained by two fac-
tors which do not similarly affect data collection sensor networks. The first factor is
that no appropriate sensing, signal conditioning, and signal processing architecture
has been broadly implemented to support event detection in distributed systems that
are simultaneously energy, space, time, and message complexity-constrained. The
1

second factor is that middleware for services such as time synchronization, localiza-
tion, and routing are predominantly and unnecessarily proactive. A comparison of
data collection and event detection will serve to illustrate the subtle but important
differences between these applications.
Fundamentally, data collection is a signal reconstruction problem in which the
objective is to centrally reconstruct observations of distributed phenomena with high
spatial and temporal fidelity. Performance metrics for such applications include the
accuracy and precision of the signal reconstruction, the correlation between the ob-
served signal and the underlying physical phenomena, and the lifetime of the sensor
network. Physical phenomena such as light, temperature, humidity, and barometric
pressure change at very low frequencies and can be sampled faithfully at periods of
a minute or more. System performance can be adjusted by introducing compression
and aggregation, or by varying the duty-cycle, sampling and communication rates,
allowing sensor lifetimes to approach a year or more.
In contrast with data collection, sensor network applications for event detection
must continuously observe noise for the rare presence of a burst of high-frequency
signal. The requirements for this style of event detection, called “passive vigilance,”
imply a sensing, signal conditioning, and signal processing architecture quite different
from that employed for the data collection problem. Fundamentally, event detection is
a signal detection problem in which the objective is to decide between two hypotheses,
or more generally a parameter estimation and pattern classification problem in which
the objective is to extract feature vectors from the signals and assign class labels to
the observed events. Performance metrics for such applications include probabilities
of detection, false alarm, classification and mis-classification, detection latency, and
2

lifetime of the sensor network. For many types of targets, the signals of interest may
be present for durations on the order of a second and with spectral content ranging
from 1Hz to 10kHz.
This thesis addresses the problem of how sensor networks for event detection can
exhibit lifetimes comparable to sensor networks for data collection when the former
must monitor much higher frequency signals than the latter. Part of the solution
lies the relative rates of sampling and communications and part of the solution lies
in rearchitecting the sensing and signal processing hardware and software for hierar-
chical detection with always-on, low-power wakeup sensors occupying the lowest tier.
Such an architecture extends the event-centric approach into analog electronics and
augments sampling-based digital signal processing with an interrupt-driven trigger.
This work draws on experiences from one short-lived, medium scale, event detecting
sensor network implementation to design the sensing, signal conditioning, and sig-
nal processing architecture and make middleware recommendations for a long-lived,
extremely large scale, event detecting sensor network.
This thesis considers wireless sensor node design issues broadly and the sensing
and signal processing required for passive vigilance more deeply. Analysis, design,
and simulation of several generations of motes and sensorboards is presented, and
the case for a new platform is made largely on the basis of sensing and reliabil-
ity needs. Requirements representative of typical intrusion detection systems are
discussed. Sample target phenomenologies for civilians, soldiers, and vehicles are
developed. Packaging considerations are discussed. Detailed schematics, drawings,
and datasets are provided in the hope that the contributions of this thesis provide a
foundation to accelerate the development of future sensor network platforms.
3

Dedicated to my father, who would have been thrilled that I returned to the
academe, surprised that it took me so long to find my way, and correct that I have
always belonged here. I am forever in your debt for the sacrifices you made to give
me this opportunity. I just wish I could have told you in the living years. . .
v
This thesis would not have been possible without the support and guidance of
family, friends, colleagues, and mentors. I am lucky to be surrounded by such re-
markable and wonderful people. My deepest and most heartfelt gratitude goes out
to each of you.
Anish Arora and Steve Bibyk, my advisors, contributed countless hours of their
precious time to advise me on research, teaching, writing, collaboration, and life. I
could not have asked for greater support, encouragement, or friendship.
Anish taught me that asking the right question was more important than answer-
ing it and that the simplest questions sometimes lead to the most profound of answers.
The high expectations he has of his students are met only by his still higher commit-
ment to them. Anish is always willing to take time out of his exceptionally packed
schedule to discuss a paper, review an algorithm, or help run an experiment. He
demonstrated unusual faith and latitude with me: encouraging me to attend many
meetings, workshops and conferences, and supporting me during my semester-long
visit to U.C. Berkeley.
Steve is always so far ahead of the curve that it is difficult to grasp the gravity of
his insights. It was he who originally introduced me to the field of sensor networks
long before it was in vogue. I wish I had been able to appreciate his vision back then.
He provided many nuggets of practical advice which helped me navigate through
graduate school with little friction. Steve suggested many ideas in circuits, signal
processing, and information theory which shaped my thesis work. His guidance and
friendship know no bounds.
vi

Benn Coifman, who introduced me to the fascinating world of traffic engineering,
taught me how to efficiently manipulate and filter large volumes of data, and served
on my masters committee.
Yuan Zheng and David Orin, without whose encouragement and support I would
not have returned to graduate school.
Paul Sivilotti, whose engaging approach to education excited me so much that I
returned to graduate school after several years in industry.
Ted Herman, who helped me discover experimental computer science and made me
feel comfortable thinking of myself as an experimental computer scientist in training.
Santosh Kumar, Sandip Bapat, Vinayak Naik, Vinod Kulathumani, Hongwei
Zhang, Hui Caoh, Murat Demirbas, Mahesh Arumugam, and Young-Ri Choi, my
fellow students working on the DARPA NEST program at Ohio State, Michigan
State, and University of Texas at Austin, whose innumerable contributions made the
work described here meaningful.
Mike Grimmer, from Crossbow Technology, and Gary Myers, a long-time friend
and mentor, who provided the engineering wind beneath my research wings. Thank
you for helping keep my feet planted firmly on the ground even while I kept reaching
for the stars.
David Culler and Shankar Sastry, who were supportive of my interest to visit U.C.
Berkeley, helped make me feel at home while there, and exhibited great faith in me
when little was justified.
Sarah Bergbreiter, Cory Sharp, Robert Szewczyk, Alec Woo, Phil Levis, Joe Po-
lastre, David Molnar, and Rodrigo Fonseca, each of whom contributed to making my
visit to U.C. Berkeley in the fall of 2003 a wonderful and enriching experience.
vii

Feng Zhao and Jie Liu, who invited me to spend the summer of 2004 at Microsoft
Research, where I was exposed to a constant stream of new ideas. Seattle, a magical
city with which I fell in love, is where I wrote much of this thesis.
Alpa Shah, Elaine Cheong, Kamin Whitehouse, Naveen Sastry, AJ Shankar, and
Manu Sridharan, who are surely a large part of the reason I fell in love with Seattle.
The writing of this thesis surely would have gone much faster had I not known you,
but then again the summer surely would have been much less memorable. You made
bringing my camera along worth it.
Ethan Stock and Andrea Reichert, for taking me into their lives, introducing me
to innumerable Northern California activities, and being the kind of friends that
everyone should be so lucky to have.
Carleen and Craig Calcaterra, who kept me sane with their friendship, humor,
and wisdom for more years than I can remember. I hope the future brings as many
New Year’s Eve nights togther as the past.
And most of all, my mother, Malini, and Wendy, each of whom sacrified the one
thing they value most – our time together – so that I could write this thesis.
P.K.D.
Redmond, Washington
viii

VITA
May 24, 1974 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Born - Calcutta, India
1997 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .B.S.E.C.E.,The Ohio State University
1997 - 1998 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .CTO,Bamboo Systems, Inc.,Santa Clara, California
1998 - 2002 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Co-Founder and CEO,NetEnabled, Inc.,Columbus, Ohio
2002 - present . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Graduate Student,The Ohio State University,Columbus, Ohio
PUBLICATIONS
Research Publications
A. Arora, P. Dutta, S. Bapat, V. Kulathumani, H. Zhang, V. Naik, V. Mittal, H.Cao, M. Gouda, Y. Choi, T. Herman, S. Kulkarni, U. Arumugam, M. Nesterenko, A.Vora, and M. Miyashita, “Line in the Sand: A Wireless Sensor Network for TargetDetection, Classification, and Tracking,” Computer Networks Journal, Elsevier, 2004
R.J. Freuler, M.J. Hoffman, T.P. Pavlic, J.M. Beams, J.P. Radigan, P.K. Dutta, J.T.Demel, and E.D. Justen, “Experiences with a Freshman Capstone Course - Designing,Building, and Testing Small Autonomous Robots,” Proceedings of the 2003 AmericanSociety for Engineering Education Annual Conference & Exposition, 2003
A.W. Fentiman, J.T. Demel, R. Boyd, K. Pugsley, P. Dutta, “Helping Students Learnto Organize and Manage a Design Project,” Proceedings of the American Society forEngineering Education Annual Conference, 1996
ix

S.V. Sreenivasan, P.K. Dutta, K.J. Waldron, “The Wheeled Actively ArticulatedVehicle (WAAV): An Advanced Offroad Mobility Concept,” Advances in Robot Kine-matics and Computational Geometry, J. Lenarcic, B. Ravani, Eds., Kluwer AcademicPublishers, 1994
FIELDS OF STUDY
Major Field: Electrical and Computer Engineering
Studies in:
Electrical Engineering Prof. Steven B. BibykComputer Science Prof. Anish K. Arora
x

TABLE OF CONTENTS
Page
Abstract . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ii
Dedication . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . v
Vita . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ix
List of Tables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xvi
List of Figures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xvii
Chapters:
1. Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.1 Motivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.2 Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.3 Organization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2. Random Event Detection . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.1 Related Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112.2 The Nature of Random Events . . . . . . . . . . . . . . . . . . . . 132.3 A Comparison of Applications . . . . . . . . . . . . . . . . . . . . . 15
2.3.1 Key Differences . . . . . . . . . . . . . . . . . . . . . . . . . 152.3.2 Energy Usage Profiles . . . . . . . . . . . . . . . . . . . . . 19
2.4 A Candidate Architecture . . . . . . . . . . . . . . . . . . . . . . . 212.4.1 Low-Power Sensing and Processing . . . . . . . . . . . . . . 222.4.2 Hierarchy . . . . . . . . . . . . . . . . . . . . . . . . . . . . 232.4.3 Reactive Middleware . . . . . . . . . . . . . . . . . . . . . . 24
xi

3. The eXtreme Scale Mote (XSM) . . . . . . . . . . . . . . . . . . . . . . . 27
3.1 Related Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 283.1.1 Applications . . . . . . . . . . . . . . . . . . . . . . . . . . 283.1.2 Platforms . . . . . . . . . . . . . . . . . . . . . . . . . . . . 303.1.3 Circuits . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
3.2 Application Requirements . . . . . . . . . . . . . . . . . . . . . . . 323.2.1 Functionality . . . . . . . . . . . . . . . . . . . . . . . . . . 323.2.2 Usability . . . . . . . . . . . . . . . . . . . . . . . . . . . . 333.2.3 Reliability . . . . . . . . . . . . . . . . . . . . . . . . . . . . 343.2.4 Performance . . . . . . . . . . . . . . . . . . . . . . . . . . 353.2.5 Supportability . . . . . . . . . . . . . . . . . . . . . . . . . 36
3.3 Platform . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 373.3.1 Processor . . . . . . . . . . . . . . . . . . . . . . . . . . . . 383.3.2 Radio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 393.3.3 Grenade Timer and Real-Time Clock . . . . . . . . . . . . . 433.3.4 Network Bootloader . . . . . . . . . . . . . . . . . . . . . . 503.3.5 User Interface . . . . . . . . . . . . . . . . . . . . . . . . . . 52
3.4 Sensors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 533.4.1 Acoustic . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 563.4.2 Magnetic . . . . . . . . . . . . . . . . . . . . . . . . . . . . 603.4.3 Passive Infrared . . . . . . . . . . . . . . . . . . . . . . . . 603.4.4 Photo and Temperature . . . . . . . . . . . . . . . . . . . . 613.4.5 Acceleration . . . . . . . . . . . . . . . . . . . . . . . . . . 62
3.5 Power . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 623.6 Packaging . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 633.7 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
4. Detection and Classification of Ferromagnetic Targets . . . . . . . . . . . 68
4.1 Related Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 694.2 Target Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 704.3 Sensor Platform . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
4.3.1 Mica2 Processor and Radio Board . . . . . . . . . . . . . . 734.3.2 Mica Sensor Board . . . . . . . . . . . . . . . . . . . . . . . 73
4.4 Towards Low-power Sensing . . . . . . . . . . . . . . . . . . . . . . 744.5 Detection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 784.6 Classification . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
4.6.1 The Influence Field as a Spatial Statistic . . . . . . . . . . . 824.6.2 Influence Field Estimator . . . . . . . . . . . . . . . . . . . 844.6.3 Classifier Design . . . . . . . . . . . . . . . . . . . . . . . . 85
xii

4.6.4 Validation . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
5. Towards UWB Radar-Enabled Sensor Networks . . . . . . . . . . . . . . 94
5.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 945.2 Theory of Operation . . . . . . . . . . . . . . . . . . . . . . . . . . 965.3 Sensor Platform . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
5.3.1 Radar Sensor and Antenna . . . . . . . . . . . . . . . . . . 995.3.2 Mica Power Board . . . . . . . . . . . . . . . . . . . . . . . 1015.3.3 Mica Sensor Board . . . . . . . . . . . . . . . . . . . . . . . 1035.3.4 Mica2 Processor and Radio Board . . . . . . . . . . . . . . 1035.3.5 Packaging . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
5.4 Power Considerations . . . . . . . . . . . . . . . . . . . . . . . . . 1045.5 Detection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
5.5.1 Signal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1075.5.2 Noise and Clutter . . . . . . . . . . . . . . . . . . . . . . . 1125.5.3 Energy Detector . . . . . . . . . . . . . . . . . . . . . . . . 1125.5.4 Histogram-similarity Detector . . . . . . . . . . . . . . . . . 115
6. ETA: The Elapsed Time on Arrival Protocol . . . . . . . . . . . . . . . . 122
6.1 Related Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1226.2 Elapsed Time on Arrival . . . . . . . . . . . . . . . . . . . . . . . . 124
7. RARE: The ReActive Range Estimation Protocol . . . . . . . . . . . . . 127
7.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1287.1.1 Background . . . . . . . . . . . . . . . . . . . . . . . . . . . 1287.1.2 Motivation and Approach . . . . . . . . . . . . . . . . . . . 1307.1.3 Organization . . . . . . . . . . . . . . . . . . . . . . . . . . 131
7.2 Related Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1317.3 Range Estimation . . . . . . . . . . . . . . . . . . . . . . . . . . . 1347.4 Distance Estimation . . . . . . . . . . . . . . . . . . . . . . . . . . 134
7.4.1 Case 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1367.4.2 Case 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1387.4.3 Ambiguities and Assumptions . . . . . . . . . . . . . . . . . 1407.4.4 Pairwise Distance Estimation Algorithm . . . . . . . . . . . 141
7.5 Implementation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1447.5.1 Network Nodes . . . . . . . . . . . . . . . . . . . . . . . . . 1457.5.2 Ultrasound Transceiver . . . . . . . . . . . . . . . . . . . . 1467.5.3 Experimental Setup . . . . . . . . . . . . . . . . . . . . . . 146
7.6 Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 148
xiii

7.7 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1507.8 Future Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152
8. Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 155
9. Future Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162
9.1 Sensor and Platforms . . . . . . . . . . . . . . . . . . . . . . . . . . 1629.2 Ultrawideband Technologies . . . . . . . . . . . . . . . . . . . . . . 1649.3 Tool Support for Signal Processing . . . . . . . . . . . . . . . . . . 1649.4 Applications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 165
Appendices:
A. Electrical Schematics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 169
A.1 Mica Power Board . . . . . . . . . . . . . . . . . . . . . . . . . . . 170A.1.1 Mica Power Board 1.0 Top View . . . . . . . . . . . . . . . 170A.1.2 Mica Power Board 1.0 Schematic . . . . . . . . . . . . . . . 171
A.2 XSM 1.0 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172A.2.1 XSM 1.0 Top View . . . . . . . . . . . . . . . . . . . . . . . 173A.2.2 XSM 1.0 Bottom View . . . . . . . . . . . . . . . . . . . . . 174A.2.3 Acoustic Subsystem . . . . . . . . . . . . . . . . . . . . . . 175A.2.4 XSM 1.0 Power, Accelerometer, and LEDs . . . . . . . . . . 176A.2.5 XSM 1.0 Radio Subsystem . . . . . . . . . . . . . . . . . . 177A.2.6 XSM 1.0 Expansion Connector . . . . . . . . . . . . . . . . 178A.2.7 XSM 1.0 Microcontroller and Memory Subsystem . . . . . . 179A.2.8 XSM 1.0 Magnetometer Subsystem . . . . . . . . . . . . . . 180A.2.9 XSM 1.0 Passive Infrared Subsystem . . . . . . . . . . . . . 181
A.3 XSM 2.0 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182A.3.1 XSM 2.0 Top View . . . . . . . . . . . . . . . . . . . . . . . 183A.3.2 XSM 2.0 Bottom View . . . . . . . . . . . . . . . . . . . . . 184A.3.3 XSM 2.0 Acoustic Subsystem . . . . . . . . . . . . . . . . . 185A.3.4 XSM 2.0 Power, Accelerometer, LEDs, and Grenade Timer 186A.3.5 XSM 2.0 Sounder Subsystem . . . . . . . . . . . . . . . . . 187A.3.6 XSM 2.0 Radio Subsystem . . . . . . . . . . . . . . . . . . 188A.3.7 XSM 2.0 Expansion Connector . . . . . . . . . . . . . . . . 189A.3.8 XSM 2.0 Microcontroller and Memory Subsystem . . . . . . 190A.3.9 XSM 2.0 Magnetometer Subsystem . . . . . . . . . . . . . . 191A.3.10 XSM 2.0 Passive Infrared Subsystem . . . . . . . . . . . . . 192
xiv

B. Circuit Simulations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193
B.1 Acoustic . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193B.2 Passive Infrared . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 195
C. Packaging Concepts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 197
C.1 Capsule . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 198C.2 Hockey Puck . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 200C.3 Cone . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 202C.4 COTS Box A . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 204C.5 COTS Box B . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 205
D. Experimental Data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 207
D.1 Magnetometer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 207D.1.1 Procedural Considerations . . . . . . . . . . . . . . . . . . . 207D.1.2 Experimental Setup . . . . . . . . . . . . . . . . . . . . . . 210D.1.3 Experiments . . . . . . . . . . . . . . . . . . . . . . . . . . 211
D.2 Radar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 226
E. Releases . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 229
Bibliography . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 232
xv
LIST OF TABLES
Table Page
2.1 Data collection vs event detection . . . . . . . . . . . . . . . . . . . . 16
2.2 Relating useful work to energy. . . . . . . . . . . . . . . . . . . . . . 20
3.1 Estimated current draw of XSM subsystems. . . . . . . . . . . . . . . 63
4.1 The confusion matrix for the influence field classifier . . . . . . . . . . 91
7.1 Range estimation error . . . . . . . . . . . . . . . . . . . . . . . . . . 153
xvi

LIST OF FIGURES
Figure Page
2.1 Energy profiles. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.1 Top view of XSM. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
3.2 Radio output power . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
3.3 Radio-antenna junction reflections. . . . . . . . . . . . . . . . . . . . 43
3.4 Grenade timer and real-time clock. . . . . . . . . . . . . . . . . . . . 48
3.5 Sallen-Key low pass filter. . . . . . . . . . . . . . . . . . . . . . . . . 57
3.6 Sallen-Key high pass filter. . . . . . . . . . . . . . . . . . . . . . . . . 59
3.7 Bode diagram of bandpass pass filter . . . . . . . . . . . . . . . . . . 65
3.8 Frequency response of PIR circuit . . . . . . . . . . . . . . . . . . . . 66
3.9 Accelerometer circuit . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
3.10 XSM enclosure. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
4.1 Magnetic dipole model. . . . . . . . . . . . . . . . . . . . . . . . . . . 72
4.2 Sample-and-hold control circuit. . . . . . . . . . . . . . . . . . . . . . 76
4.3 Magnetometer signal detection chain . . . . . . . . . . . . . . . . . . 79
4.4 The shape of the influence field of a soldier and a vehicle . . . . . . . 87
xvii

4.5 The influence field of a soldier and a car as measured in situ . . . . . 89
4.6 Probability distribution of the estimated influence field . . . . . . . . 90
5.1 Radar sensor network node . . . . . . . . . . . . . . . . . . . . . . . . 100
5.2 Advantaca TWR-ISM-002 . . . . . . . . . . . . . . . . . . . . . . . . 101
5.3 Mica Power Board . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
5.4 Radar sensor node . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
5.5 Radar initialization . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
5.6 Radar waveform and spectrogram of person running . . . . . . . . . . 107
5.7 Radar waveform and spectrogram of person walking . . . . . . . . . . 108
5.8 Radar signature of person walking. . . . . . . . . . . . . . . . . . . . 109
5.9 Radar signature of person running. . . . . . . . . . . . . . . . . . . . 110
5.10 Radar signature of vehicle passing. . . . . . . . . . . . . . . . . . . . 111
5.11 Sample radar noise data . . . . . . . . . . . . . . . . . . . . . . . . . 113
5.12 Amplitude and histogram of radar noise . . . . . . . . . . . . . . . . 117
5.13 Amplitude and histogram of radar signal . . . . . . . . . . . . . . . . 118
5.14 Moving histogram over radar waveform . . . . . . . . . . . . . . . . . 121
6.1 Elapsed Time on Arrival (ETA) algorithm . . . . . . . . . . . . . . . 125
7.1 Target trajectory between the nodes. . . . . . . . . . . . . . . . . . . 135
7.2 Target trajectory not between the nodes. . . . . . . . . . . . . . . . . 136
7.3 Sensor Hardware . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145
7.4 Temporal variation of the range error over time . . . . . . . . . . . . 147
xviii

7.5 The range error distribution . . . . . . . . . . . . . . . . . . . . . . . 148
7.6 The target trajectories . . . . . . . . . . . . . . . . . . . . . . . . . . 149
7.7 Experimental Setup . . . . . . . . . . . . . . . . . . . . . . . . . . . . 150
7.8 Range estimate waveform. . . . . . . . . . . . . . . . . . . . . . . . . 151
7.9 Range estimate sum and difference . . . . . . . . . . . . . . . . . . . 152
7.10 Target trajectory . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153
8.1 Typical data collection schedule. . . . . . . . . . . . . . . . . . . . . . 159
B.1 Frequency response of microphone band pass filter circuit . . . . . . . 194
B.2 Frequency response of PIR circuit . . . . . . . . . . . . . . . . . . . . 196
C.1 Capsule enclosure. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 198
C.2 Hockey puck enclosure. . . . . . . . . . . . . . . . . . . . . . . . . . . 200
C.3 Cone enclosure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 202
C.4 Simple COTS enclosure . . . . . . . . . . . . . . . . . . . . . . . . . 204
C.5 Heavily-modified COTS enclosure . . . . . . . . . . . . . . . . . . . . 205
C.6 Heavily-modified COTS enclosure (transparent) . . . . . . . . . . . . 206
D.1 Experimental Setup. . . . . . . . . . . . . . . . . . . . . . . . . . . . 211
D.2 Velocity Experiment. . . . . . . . . . . . . . . . . . . . . . . . . . . . 214
D.3 Distance Experiment. . . . . . . . . . . . . . . . . . . . . . . . . . . . 217
D.4 Orientation Experiment. . . . . . . . . . . . . . . . . . . . . . . . . . 221
D.5 Magnetometer bias drift . . . . . . . . . . . . . . . . . . . . . . . . . 225
xix

D.6 UWB radar dataset thumbnails . . . . . . . . . . . . . . . . . . . . . 228
xx

CHAPTER 1
INTRODUCTION
Deeply embedded and densely distributed networked systems that can sense and
control the environment, perform local computations, and communicate the results
will allow us to interact with the physical world on space and time scales previ-
ously unobtainable. These sensor actuator networks or just “sensornets” became
possible with the emergence of micro electro mechanical systems (MEMS) sensors
and actuators, low-power complementary metal oxide semiconductor (CMOS) analog
and digital electronics including radios and microcontrollers, custom very large scale
integration (VLSI) circuits, and organic photovoltaic cells. While not all of these
innovations have made their way into mainstream research platforms for sensors net-
works, many of the technologies have been incorporated into commercial off-the-shelf
(COTS) platforms which have supported a groundswell of systems and applications
research.
1

1.1 Motivation
Paraphrasing Mark Weiser, the late Chief Scientist of Xerox PARC and father of
ubiquitous computing, “‘Applications are of course the whole point of’ sensor net-
working.”1 It is clear that wireless sensor networks hold great promise as an enabling
technology for a variety of applications. Habitat monitoring is one such application
that is representative of an entire class of data collection applications which have
received considerable attention in the literature. Fundamentally, data collection is
a signal reconstruction problem in which the objective is to centrally reconstruct
observations of distributed phenomena with high spatial and temporal fidelity. Per-
formance metrics for such applications include the accuracy and precision of the signal
reconstruction, the correlation between the observed signal and the underlying phys-
ical phenomena, and the lifetime of the sensor network. Physical phenomena such as
light, temperature, humidity, and barometric pressure change at very low frequencies
and can be sampled faithfully at periods of a minute or more. System performance
can be adjusted by introducing compression and aggregation, or by varying the duty-
cycle, sampling and communication rates. Using COTS platforms, researchers have
demonstrated periodic data collection applications with lifetimes on the order of a
year.
In contrast with data collection, sensor network applications like intrusion detec-
tion and military surveillance must continuously observe noise for the rare presence
of a burst of high frequency signal. The requirements for this style of application,
1Weiser actually wrote “Applications are of course the whole point of ubiquitous computing,”but many consider sensornets and ubiquitous computing to be closely related.
2

called event detection, imply a sensing and signal processing architecture quite dif-
ferent from that employed for the data collection problem. Fundamentally, intrusion
detection is a event detection problem in which the objective is to decide between
two or more hypotheses, or more generally a parameter estimation, pattern classifica-
tion, and target tracking problem in which the objective is to extract feature vectors
from the signals, assign class labels to the intruding target, and estimate its past and
future locations. Performance metrics for such applications include probabilities of
detection, false alarm, classification and mis-classification, detection latency, tracking
accuracy, and system lifetime. For many types of targets, the signals of interest may
be present for durations on the order of a second and with spectral content ranging
from 1Hz to 10kHz.
While existing sensornet platforms have enabled researchers to demonstrate long-
lived periodic data collection applications, similarly long-lived intrusion detection
and military surveillance have not, to our knowledge, surfaced. We believe that the
heretofore lack of unified platform and middleware support for passive vigilance has
been a key inhibiting factor. One bottleneck is likely due to the multi-disciplinary
nature of the field. While sensornets are often characterized as standard experimental
computer science and engineering, the design space is much broader and draws on
many aspects of electrical engineering and computer science, and at least some areas
of mechanical engineering and materials science. As a result of the unusually broad
range of backgrounds and technologies needed to field complete systems, researchers
have focused on narrower aspects of the field, and have chosen to use commercially
available platforms rather than create highly customized new ones, a few exceptions
3

notwithstanding. Building new platforms is an expensive and time consuming propo-
sition so it is not at all surprising that so few are broadly available and consequently
much of the research effort avoids platform building.
We take the opposite view: that ultimately these diverse sensors, algorithms,
platforms, radios, batteries, and other components must be assembled into cohesive
integrated systems to provide value, and that the process of actually building these
systems will teach us a great deal. Again, Mark Weiser’s words are at once prescient
and apropos: “The research method for ubiquitous computing is standard experi-
mental computer science: the construction of working prototypes of the necessary
infrastructure in sufficient quantity to debug the viability of the systems in everyday
use; ourselves and a few collegues serving as guinea pigs. This is an important step
toward ensuring that our infrastructure research is robust and scalable in the face of
the details of the real world.”
1.2 Overview
This thesis addresses the question of how sensor networks for event detection can
exhibit lifetimes comparable to sensor networks for data collection when the former
must monitor much higher frequency signals than the latter. We advocate a purely
reactive or event-driven sensing, signal processing, middleware, and communications
architecture for the detection of random events.
One aspect of the solution lies in reallocating power budgets based on the rela-
tive rates of sampling and communications. Another aspect of the solution lies in
rearchitecting the sensing and signal processing hardware and software for hierarchi-
cal detection with low-power wakeup sensors occupying the lowest tier. Most existing
4

sensor designs do not address the low-power sensing requirement for long-lived net-
works so this has led to the genesis and evolution of a novel sensor network platform
developed to investigate low-power event detection applications which require pas-
sive vigilance. A third aspect of the solution lies in reactive, or lazy, middleware for
services like time synchronization and localization.
We ground our research in the problem of intrusion detection using sensor net-
works. The instrumentation of a militarized zone with distributed sensors is a decades-
old idea, with implementations dating at least as far back as the Vietnam-era Igloo
White program [1]. Unattended ground sensors (UGS) exist today that can de-
tect, classify, and determine the direction of movement of intruding personnel and
vehicles. The Remotely Monitored Battlefield Sensor System (REMBASS) exempli-
fies UGS systems in use today [1]. REMBASS exploits remotely monitored sensors,
hand-emplaced along likely enemy avenues of approach. These sensors respond to
seismic-acoustic energy, infrared energy, and magnetic field changes to detect enemy
activities. REMBASS processes the sensor data locally and outputs detection and
classification information wirelessly, either directly or through radio repeaters, to the
sensor monitoring set (SMS). Messages are demodulated, decoded, displayed, and
recorded to provide a time-phased record of intruder activity at the SMS.
Like Igloo White and REMBASS, most of the existing radio-based unattended
ground sensor systems have limited networking ability and communicate their sensor
readings or intrusion detections over relatively long and frequently uni-directional
radio links to a central monitoring station, perhaps via one or more simple repeater
stations. Since these systems employ long communication links, they expend precious
5

energy during transmission, which in turn reduces their lifetime. For example, a
REMBASS sensor node, once emplaced, can be unattended for only 30 days.
Recent research has demonstrated the feasibility of ad hoc aerial deployments of
1-dimensional sensor networks that can detect and track vehicles. In March 2001, re-
searchers from the University of California at Berkeley demonstrated the deployment
of a sensor network onto a road from an unmanned aerial vehicle (UAV) at Twen-
tynine Palms, California, at the Marine Corps Air/Ground Combat Center. The
network established a time-synchronized multi-hop communication network among
the nodes on the ground whose job was to detect and track vehicles passing through
the area over a dirt road. The vehicle tracking information was collected from the
sensors using the UAV in a flyover maneuver and then relayed to an observer at the
base camp.
In this work, we describe a system and method to detect and classify ferromagnetic
targets. Our approach complements and improves upon existing unattended battle-
field ground sensors by replacing the typically expensive, hand-emplaced, sparsely-
deployed, non-networked, and transmit-only sensors with collaborative sensing, com-
puting, and communicating nodes. Such an approach will enable military forces
to blanket a battlefield with easily deployable and low-cost sensors, obtaining fine-
grained situational awareness enabling friendly forces to see through the “fog of war”
with precision previously unimaginable. A strategic assessment workshop organized
by the U.S. Army Research Lab concluded:
“It is not practical to rely on sophisticated sensors with large power supplyand communication [demands]. Simple, inexpensive individual devices de-ployed in large numbers are likely to be the source of battlefield awarenessin the future. As the number of devices in distributed sensing systems in-creases from hundreds to thousands and perhaps millions, the amount of
6

attention paid to networking and to information processing must increasesharply.”
The main contributions of this work are that it (i) presents an architecture and
methodology for constructing long-lived event detection applications, (ii) demon-
strates, through a proof-of-concept system implementation, that it is possible to
detect and discriminate between multiple object classes using simple low-power sen-
sors, (iii) develops low-power signal detection algorithms for processing radar signals,
(iv) presents a novel application of the sample-and-hold circuit for reducing the power
consumption of sensors, (v) develops reactive algorithms for time synchronization and
localization that are suitable for event detection, and (vi) presents empirical data on
the noise and clutter that sensor networks in real environments will need to contend
with.
This thesis addresses the problem of how sensor networks for signal detection
can exhibit lifetimes comparable to sensor networks for signal reconstruction when
the former must monitor much higher frequency signals than the latter. Part of
the solution lies the relative rates of sampling and communications and part of the
solution lies in rearchitecting the sensing and signal processing hardware and software
for hierarchical detection with low-power wakeup sensors occupying the lowest tier.
This thesis considers wireless sensor node design issues broadly and the sensing
and signal processing required for passive vigilance more deeply. Analysis, design, and
simulation of several generations of motes and sensorboards is presented, and the case
for a new platform is made largely on the basis of sensing and reliability needs. Re-
quirements representative of typical intrusion detection systems are discussed. Sample
target phenomenologies for civilians, soldiers, and vehicles are developed. Packaging
7
considerations are discussed. Device driver and system library listings are presented
and annotated. Unit, system, and network level testing strategies and applications
are presented. Detailed schematics, drawings, and datasheet references are provided
in the hope that the contributions of this thesis provide a foundation to accelerate
the development of future sensor network platforms.
Each node can send out as little as one bit of information about the presence
or absence of a target in its sensing range and only requires local detection and
estimation, but no computationally complex time-frequency domain signal processing.
1.3 Organization
Chapter 2 presents a detailed discussion about the differences between periodic
data collection and random event detection using wireless sensor networks. Chapter 3
presents the philosophy, requirements, and design of the eXtreme Scale Mote (XSM).
This new mote is an integrated application-specific sensor network node for investigat-
ing reliable, large-scale, and long-lived surveillance applications. Chapter 4 considers
low-power hardware and energy efficient algorithms for detection and classification
of ferromagnetic targets. This chapter also introduces the influence field as a spatial
statistic suitable for classification purposes. Chapter 5 investigates the suitability of
ultrawideband radar as a sensing technology for resource-constrained sensor networks
and considers sensor-specific factors like range, power, latency, interference, and size
as well as low space, time, and message complexity algorithms for signal detection,
parameter estimation, and target classification. Chapter 6 observes that by postpon-
ing the conversion of local time to global time for as long as possible, we can reduce
the energy consumed for proactive timesync. This chapter presents a simple time
8

synchronization protocol for maintaining the elapsed time from an event. Chapter 7
explores the relationship between mobility and ranging. This chapter shows that a
mobile object can aid sensor nodes in estimating the distance to neighboring nodes
and presents an algorithm to do so. Chapter 8 summarizes our results, discusses some
of the challenges and failures we encountered during the development and fielding of
this system, and provides our concluding thoughts. Chapter 9 discusses our future
plans in the areas of tools, sensors, platforms, algorithms, and applications. Finally,
the appendices present electrical schematics, circuit simulations, packaging concepts,
and selected experimental data.
9

CHAPTER 2
RANDOM EVENT DETECTION
Wireless sensor networks hold great promise as an enabling technology for a variety
of applications. Data collection and event detection are two such classes of applica-
tions that are broadly representative and which have received considerable attention
in the literature. While wireless multi-hop data collection has achieved operational
lifetimes on the order of a year or more, we are unaware of lifetimes exceeding a few
days or weeks for wireless multi-hop event detection using sensor networks. Our key
observation is that the detection of random events is a fundamentally different prob-
lem from the periodic collection of data and that these differences give rise to a rich
space of tradeoffs and a multitude of opportunities for energy savings. For example,
data collection may allow sensor nodes to sleep most of the time but event detection
requires that sensors be vigilant most of the time. On the other hand, data collection
may require frequent messaging to report measurements but event detection may only
require reporting when an event actually occurs. In the case of sensing, data collec-
tion is more miserly with energy but in the case of messaging, event detection may
be more miserly with energy. Grounded in our experiences from two sensor network
deployments for detecting, classifying, and tracking intruding civilians, soldiers, and
10

vehicles, we present a set of design considerations and implications for the general
class of event detection applications.
2.1 Related Work
A number of earlier works have recognized and addressed some of unique char-
acteristics of event detection, as well as the differences between event detection and
data collection. In, [2] and [3], Pottie, et.al. identify tradeoffs in detection and com-
munications, ideas for network management, and scalable network architectures. The
first of the two papers identifies the important question of hierarchy of signal process-
ing functionality and advocates aggressively managing power at all levels. It is clear,
the paper claims, that individual nodes must possess considerable signal processing
ability in order to limit costly communications.
In [4], Kahn, et.al. identify several networking and application challenges pre-
sented by networks of millimeter-scale system, or “Smart Dust,” and address tradeoffs
between bit rate, distance, and energy per bit.
In [5], Tennenhouse suggests systems will need to be designed differently to en-
able the networking of thousands of embedded processors per person. In particular,
systems must “get physical, get real, and get out.” Getting physical means systems
will be connected to the physical world. Getting real underscores the importance of
real-time system performance. Getting out involves moving from human-interactive
computing to human-supervised computing. Tennenhouse advocates sample-friendly
architectures, inverse and peer-tasking, and online measurement and tuning, all of
which are particularly relevant to event detection.
11

In [6], West, et.al. present the challenges and tradeoffs for dense spatio-temporal
monitoring of the environment and compare the characteristics of military surveil-
lance and environmental monitoring, which are representative of event detection and
data collection, respectively. The characteristics of military surveillance applica-
tions include performance-driven, mobile sensor nodes, dynamic physical topology,
distributed detection/estimation, event-driven/multi-tasking, and real-time require-
ments. The characteristics of environmental monitoring applications include cost-
driven, fixed sensor nodes, static physical topology, spatio-temporal sampling, sched-
uled signel tasks, and delays acceptable/preferable. The focus of the work is on
environmental monitoring so there is limited discussion of military surveillance appli-
cations.
In [7], Madden observes that vehicle tracking applications differ in several ways
from (habitat) monitoring deployments including locality of activity, tracking handoff,
and multi-target tracking and disambiguation.
In [8], Polastre provides a detailed case study of a habitat monitoring application
and identifies several performance metrics and design considerations. For example, it
is this paper that demonstrates network lifetimes on the order of a year and sampling
rates on the order of one sample per second. Since the work provides so many useful
details, it serves as an exemplar data collection design point.
In [9] Adlakha, et. al. identified four key, sufficient, and independent user level
quality-of-service (QoS) parameters appropriate for sensor networks including density,
spatial-temporal accuracy, latency, and lifetime.
In [10], He, et.al. describe the design and implementation of a running system for
energy-efficient surveillance. This work demonstrates the effectiveness of trading off
12

energy-awareness and surveillance performance by adaptively adjusting the sensitivity
of the system. The results show that the surveillance strategy is adaptable and
achieves a significant extension of network lifetime. The paper also outlines some
lessons learned including false alarm reduction and software calibration of sensors.
In [11], Gu and Stankovic describe radio-triggered wakeup capability as an im-
portant power management technique for prolonging the lifespan of sensor networks.
While it is not clear that the design presented in this paper will work in practice, the
concept of a wakeup radio extends the event-driven hierarchy further into hardware,
complementing the event-driven operating system, and allowing for node lifetimes to
approach 180 days.
In [12], Arora, et.al. report on an intrusion detection system using sensor networks
and provide a set of performance metrics including latency and probabilities of detec-
tion, false alarm, classification and misclassification, as well as design considerations
including reliability, energy, and complexity. Like [8], this work provides many useful
details and serves as an exemplar event detection design point.
2.2 The Nature of Random Events
We have thus far used the term “random event” somewhat loosely. Intuitively,
random events may occur at unpredictable frequencies or an unknown point in the
future. However, we may still have a model of cumulative event statistics.
Many random arrival or counting processes follow the Poisson distribution. Ex-
periments yielding numerical values of a random variable X, the number of arrivals
occuring during a given time interval or in a specified region, are frequently called
Poisson counting processes or Poisson experiments. The time interval of interest can
13

be any length – seconds, minutes, hours, days, weeks, months, or years. Examples
of temporal Poisson counting processes might include the number of illegal border
crossing per hour or the number of earthquakes per year. Examples of spatial Pois-
son counting processes might include the number people per acre or the number of
border crossing attempts per mile. A Poisson process possesses inter-event times that
are jointly independent, identically distributed, and follow an exponential probability
density function. From a practical perspective, this means that our events are not
causally-related – border crossers do not collude and earthquakes occur independently
of one another.
The probability distribution of the Poisson random variable X, representing the
number of events occuring in a given time interval or specified regions is:
p(x; µ) =e−µµx
x!, x ∈ 0, 1, 2, 3, . . . (2.1)
where µ is the average number of events occurring in the given time interval or region.
[13]
Failures represent another class of interesting events. Component failures may
lead to system failures if they are not detected and corrected. For example, a truss
on a bridge may buckle or a solenoid in a printer may burn out. The Weibull has been
used to model the time to failure of a component, measured from some specified time
until the component fails. The time to failure is represented by a continuous random
variable T with probability density function f(t). A continuous random variable T
follows the Weibull distribution, with parameters α and β, if its probability density
function is:
f(t) = αβtβ−1e−αtβ , t > 0 (2.2)
14
and zero otherwise, where α > 0 and β > 0. [13]
What can a sensor node do with the knowledge of the probability distribution
function of an event generating process? It can dynamically adjust its level of vigilance
based on the likelihood of an event occurring. This is an important degree of freedom
that is useful for offering differentiated services, especially when node resources are
at a premium.
Unfortunately, for rare or rarely observed events, we may not know the probability
distribution function a priori. In some cases, the purpose of using a sensor network
might be to empirically measure the cumulative event statistics. In these situations,
our sensor network must become a trusted instrument and exhibit long-life, vigilant
behavior, and accurate statistics.
2.3 A Comparison of Applications
To address the problem of how sensor networks for event detection can exhibit
lifetimes comparable to sensor networks for data collection, we begin by identifying
some of the many differences between these application classes. We then consider how
these application differences lead to vastly different energy usage profiles, suggesting
distinct optimizations for these classes.
2.3.1 Key Differences
Table 2.1 lists a number of the key differences between data collection and event
detection.
The differences in the requirements of data collection and event detection lead
to differences in the space, time, and message complexity of the algorithms used
15

Data Collection Event Detection
Signal Reconstruction Signal DetectionReconstruction Fidelity Detections, False Alarms
Data-centric Metadata-centricData-driven Messaging Decision-driven Messaging
High-latency Acceptable Low-latency RequiredPeriodic Traffic Bursty Traffic
Store & Forward Messaging Real-Time MessagingAggregation Fusion, ClassificationOmnichronic Rare, Random, Short-lived
Absolute Global Time Relative Local Time
Table 2.1: A summary of the differences between data collection and event detectionapplications.
to realize these applications. Increases in complexity may result in corresponding
increases in energy usage.
Signal Reconstruction vs Signal Detection: The essence of data collection
is information and communications theory which seeks to centrally reconstruct a
distributed space-time varying field. The essence of event detection is statistical
detection theory that seeks to decide among two or more hypotheses. Assuming
that data collection is periodic, that the data change with some uncertainty, and that
events are rare, it would appear that data collection has a greater message complexity
than event detection as measured by information communicated per unit time.
Reconstruction Fidelity vs Detections, False Alarms: Important perfor-
mance metrics for data collection include the accuracy and precision of the recon-
structed field. Important performance metrics for event detection include the proba-
bilities of detection and false alarm. Greater fidelity would appear to require greater
space and message complexity. Improved detection and false alarm rates would appear
16

to require greater space (storing more samples or intermediate results of computa-
tions), time (more complex computations), or message (comparing detection decisions
with neighbors) complexity.
Data-centric vs Metadata-centric: Data collection usually focuses on sam-
pling directly measurable phenomena like temperature, pressure, humidity, and solar
radiation. Event detection focuses on identifying the presence of an event by detecting
or estimating changes the event causes in measurable phenomena like Doppler shift
in a radar signal or a change in the acoustic spectral characteristics of the environ-
ment. Extracting metadata from data requires greater time complexity than simply
collecting the data in the first place and it likely requires greater space complexity as
well.
Data-driven vs Decision-driven Messaging: From an information-theory
perspective, the amount of communications required to reconstruct a space-time field
is a function of data entropy. That is, the greater the uncertainty or random vari-
ability in the data, the greater the level of communications required to reconstruct
it, and the greater the space and message complexity. Event detection applications
require the system to decide between two or more hypotheses by analyzing signals and
reporting only when certain hypotheses are true. Therefore, the message complexity
is a function of event frequency.
High-latency Acceptable vs Low-latency Required: Data collection appli-
cations can tolerate significant reporting delays. In contrast, event detection often
requires a low-latency between detection and reporting. A consequence of low-latency
is that sensor nodes must listen continuously for radio transmissions or nodes must
17

have the ability to wakeup neighboring nodes quickly. Regardless of how this is imple-
mented, an always-on or low-latency wakeup service will consume more power than
either an otherwise equivalent high-latency or scheduled service would require.
Periodic Traffic vs Bursty Traffic: The message traffic patterns for data collec-
tion and event detection are different. Data collection traffic tends to be periodic and
lends itself to scheduled communications. Event detection traffic tends to be bursty
and makes poses different constraints, like latency and instantaneous throughput, on
the media access control and routing layers.
Store & Forward Messaging vs Real-Time Messaging: Data collection
applications have the luxury of storing data for extended periods of time prior to for-
warding. Therefore, a given node may be able to compress the data before transmis-
sion, therefore reducing message complexity at the cost of space and time complexity.
Event detection requires nearly immediate reporting, eliminating the possibility of
event compression at a single node.
Aggregation vs Fusion and Classification: Data collection sensor nodes may
aggregate redundant readings across space, reducing the amount of message traffic
that must be exfiltrated from the network. Event detection frequently requires in-
formation fusion for performing multi-lateration, classification, or tracking. In such
cases, multiple nodes may have redundant detections but the diversity in signal pa-
rameters or node location is not redundant, and cannot simply be aggregated away.
Omnichronic vs Rare, Random, Short-lived: Data collection usually focuses
on sampling slow-changing and always-present phenomena like temperature, pressure,
humidity, and solar radiation. Consequently, data collection sampling rates of 0.01Hz
to 1Hz are common. Event detection focuses on identifying abrupt parameter changes
18

in a signal with frequency components typically between 1Hz and 10kHz. These
signals are often rare (10−3Hz to 10−8Hz), occur randomly (following Poisson or
Weibull distributions), and are frequently short-lived (1s - 10s).
Absolute Global Time vs Relative Local Time: Global timesync service
may be neither required nor energy-efficient for intrusion detection applications. Fre-
quently, timesync’s role in intrusion detection is to correlate in time observations
that occur across space. The need to correlate these observations stems from the
fundamental requirements of the intrusion detection application itself. False alarm
rates can be lowered if multiple, geographically-close, sensors observe the same event
at nearly the same time. Tracking an object requires estimating its spatio-temporal
position with respect to a common space-time basis, which requires localization in
addition to timesync.
2.3.2 Energy Usage Profiles
There are four main ways in which nodes consume energy: sensing, computing,
storing, and communicating. Each of these processes consumes a different amount of
energy for each unit of useful work that it performs. Recall that our key observation
was that data collection and event detection have very different energy usage profiles
and that these differences give rise to a rich space of tradeoffs and a multitude of
opportunities for energy reallocation.
In order to directly compare sensing, computing, storing, and communicating pro-
cesses, we must use a common denominator. Energy, it would seem, is the perfect
denominator. Table 2.2 relates units of useful work to corresponding energy con-
sumed.
19
Process Metric Units
Sensing Esens Joules/sampleSensing Coverage Lcoverage Langley (W/m2)
Signal Conditioning Wsigcond WattsComputing Ecomp Joules/instr.
Storing Wstor Watts/bit †Transmission Etx Joules/bit ‡
Reception Erx Joules/bit ‡Listening Wlisten Watts
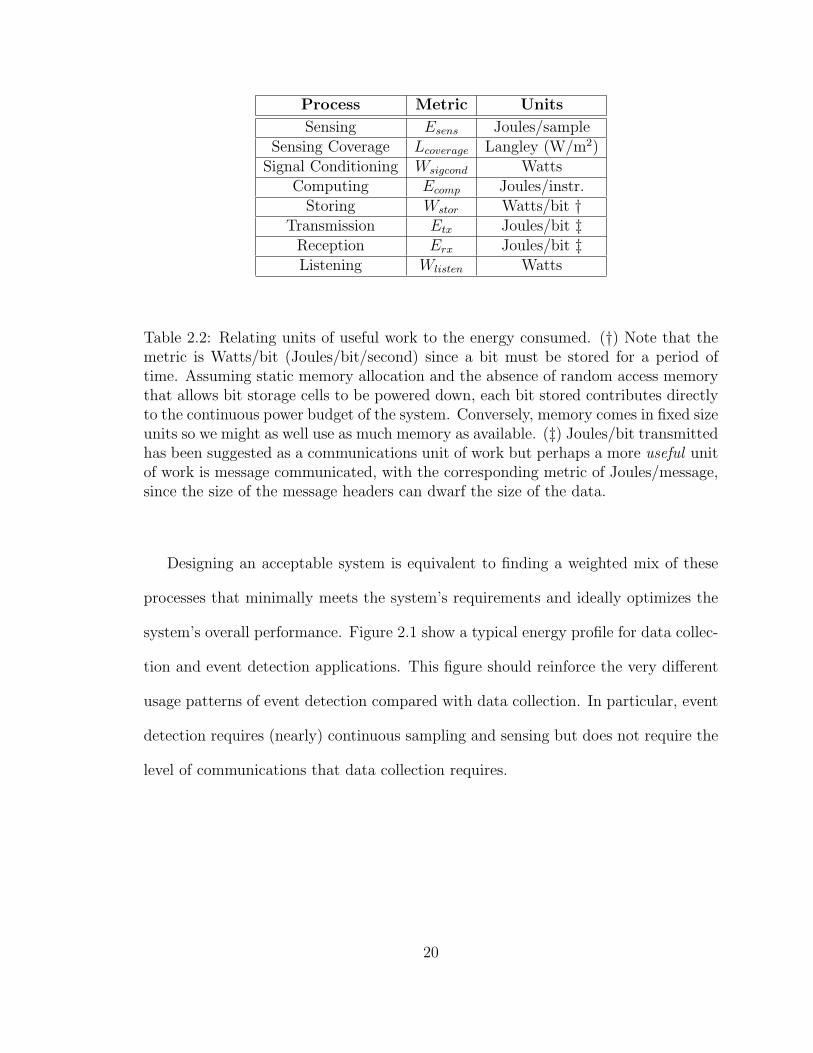
Table 2.2: Relating units of useful work to the energy consumed. (†) Note that themetric is Watts/bit (Joules/bit/second) since a bit must be stored for a period oftime. Assuming static memory allocation and the absence of random access memorythat allows bit storage cells to be powered down, each bit stored contributes directlyto the continuous power budget of the system. Conversely, memory comes in fixed sizeunits so we might as well use as much memory as available. (‡) Joules/bit transmittedhas been suggested as a communications unit of work but perhaps a more useful unitof work is message communicated, with the corresponding metric of Joules/message,since the size of the message headers can dwarf the size of the data.
Designing an acceptable system is equivalent to finding a weighted mix of these
processes that minimally meets the system’s requirements and ideally optimizes the
system’s overall performance. Figure 2.1 show a typical energy profile for data collec-
tion and event detection applications. This figure should reinforce the very different
usage patterns of event detection compared with data collection. In particular, event
detection requires (nearly) continuous sampling and sensing but does not require the
level of communications that data collection requires.
20

Data CollectionSampleCompressReceiveAggregateTransmitSleep
Event DetectionEvent OccurrenceFalse AlarmSample/SenseWakeup/Det/Est/ClassWakeup/TransmitFusionForward
Figure 2.1: A comparison of energy profiles for data collection and event detectionapplications.
2.4 A Candidate Architecture
We now present our proposed architecture for random event detection with wire-
less sensor networks. Taken to an extreme, our design philosophy advocates an en-
tirely event-driven architecture. We depart from the literature in three main areas.
First, at the lower tiers of sensing, we replace sampling and digital signal processing
with continuous-time, mixed-signal electronics that provide an event-driven interface
to sensor hardware. This approach extends popular event-driven architectures into
sensory subsystems. Second, we advocate hierarchy in the composition of the sensor
nodes themselves. The case for hierarchy and heterogeneity within a sensor network
has been made and is generally accepted. We propose the metric that each level in the
nodal hierarchy provide a 10× improvement in some relevant factor. A consequence
21

of this hierarchy is that it is acceptable for lower tiers to provide unacceptably high
false alarm rates because higher tiers can filter these false detections and trigger at
acceptable false alarm rates. These filtered triggers can then initiate signal process-
ing activity which might otherwise have too high a complexity. Finally, we advocate
purely reactive middleware protocols for many event detection applications. When the
frequency of random events is much lower than peer-to-peer middleware messaging,
stale state is unnecessarily maintained. By updating state ex post facto, significant
energy can be saved and instead used to extend system lifetime. Of course, our ideas
are difficult to implement without realizing some important advances. In particular,
low-power wakeup sensors and wakeup radios are needed to extend the event-driven
approach into hardware and across nodes.
2.4.1 Low-Power Sensing and Processing
Occupying the lowest tiers of this architecture are zero-power and low-power
wakeup sensors. These sensors may be passive, and simply transduce ambient en-
ergy into electrical signals by directly coupling at the resonant frequencies of the
sensors, or they may be active, drawing a few tens of microwatts to amplify signals.
Low-power wakeup radios will allow neighboring sensor nodes to initiate communica-
tions even when the processor and main radio is turned off. In any case, these sensors
are likely to exhibit poor signal-to-noise ratios and may be susceptible to relatively
high false alarm rates.
The next higher tier in our event detection architecture consists of mixed-signal
electronics for conditioning and filtering the output of the raw sensors. Rather than
simple filters, we envision increasingly lower-power programmable signal processing
22

electronics. For example, programmable differentiators, integrators, detectors, ana-
log median filters, and automatic gain control circuits will complement today’s simple
threshold comparator and lowpass, bandpass, bandstop and highpass filter circuits.
Specialized mixed-signal circuits may provide extremely fine-grained and synchro-
nized power control, sampling, filtering, and triggering, all in hardware. Such circuits
will lower false alarm and power consumption rates by an order of magnitude over
the raw sensors and eventually this tier will be implemented using programmable
mixed-signal standard cells or dedicated VLSI signal processors. The outputs from
this tier will include both digital interrupts/control and analog signals.
2.4.2 Hierarchy
We are surrounded by hierarchy. The composition of nearly all complex systems,
whether man-made or natural, exhibit hierarchy. Wireless sensor networks provide
additional levels of hierarchy which enable us to acquire, process, and act on increas-
ingly larger amounts of information collected over increasingly longer periods of time
and from increasingly larger spans of space. Such technology allows us to increase our
“span of control” to use the business vernacular and acts as a “force multiplier” to use
the military jargon. The case for hierarchy and heterogeneity within a sensor network
has been made and is generally accepted whether in computation (from a few mega-
hertz to a few hundred megahertz), communications (from a few kilobits/second to
tens of megabits/second), storage (from tens of kilobytes to hundreds of megabytes),
or power (from hundreds of microamps to hundreds of milliamps).
We propose that the hierarchy should be extended to the composition of the
sensor nodes themselves and that each level in the nodal hierarchy provide a 10×
23

improvement in some relevant factor. For example, consider a cheap sensor whose
power consumption is 1/10 of that of a better sensor but whose false alarm rate is 10×
worse than the better sensor. Under normal circumstances, we might choose only one
sensor from the two. However, budget permitting, we argue that both sensors should
be chosen and the cheap sensor should occupy a lower level in the nodal hierarchy
than the better sensor. Our rationale follows from the rare and random nature of
events of interest.
2.4.3 Reactive Middleware
In some cases, we advocate using reactive implementations of time synchroniza-
tion, localization, and routing. In the context of sensor networks, time synchroniza-
tion, or simply timesync, refers to the problem of synchronizing clocks across a set of
sensor nodes which are connected to one another over a single- or multi-hop wireless
communications channel. Localization is concerned with establishing a spatial coor-
dinate system and determining the positions of the sensor nodes and other objects
of interest within this coordinate system. Routing is concerned with the problem of
getting a message from one node to another node.
Time Synchronization
Timesync is useful for establishing the temporal ordering of events (X happened
before Y) and real-time issues (X and Y happened within a certain interval) [14].
Timesync also may be used to coordinate future actions at two or more nodes (X, Y,
and Z will all happen at time T).
Proactive timesync algorithms attempt to maintain continuously synchronized
clocks through the use of periodic messages. Since individual clocks tend to run at
24

slightly different speeds, clocks tend to skew during the intervals between successive
timesync messages. The amount of skew is influenced by several factors including
crystal accuracy, temperature coefficients, and messaging frequency.
We argue that a global or proactive timesync service may be neither required
nor energy-efficient for event detection applications. Frequently, timesync’s role in
event detection is to correlate in time observations that occur across space. The
need to correlate these observations stems from the fundamental requirements of
the application itself. False alarm rates can be lowered if multiple, geographically-
close, sensors observe the same event at nearly the same time. Tracking an object
requires estimating its spatio-temporal position with respect to a common space-time
basis, which requires localization in addition to timesync. However, we note that by
postponing the conversion of local time to global time for as long as possible, we can
significantly reduce the energy consumed by timesync.
Localization
In some applications, the sensor nodes may number in the thousands or be de-
ployed in a manner that results in random positions and orientations. Additionally,
the nodes may move, be moved, or become inaccessible after deployment. In such
cases, it may not be practical to individually configure each node with its position. A
canonical application exemplifying these possibilities is the detection and tracking of
targets traveling through an area in which sensor nodes have been deployed randomly
[15]. In such applications, the past, present, or future locations of the target must
be estimated with respect to a local or global coordinate system. In order to specify
the target location with respect to the coordinate system, the sensor nodes must be
25

aware of their own positions within this coordinate space; hence the importance of
localization in detection and tracking applications of sensor networks.
Localization is important in many other sensor network applications. There are
cases in which node locations, however crude, are needed soon after deployment. For
example, geographic routing requires nodes to route messages along gradients that are
computed from node locations. For such cases, a simple localization scheme, perhaps
based on hop-count [16], can be used to bootstrap the node positions.
In many detection, classification, and tracking applications, the nodes may be
equipped with sensors that can detect the distance to a moving object, or target, but
may not require specialized hardware solely to support localization, if it were possible
to perform it in some other way. Additional hardware supporting just localization
may add uneccesary cost and complexity. We also observe that in some situations,
a node’s location may not be needed at all until a target is actully present. In
such cases, a lazy localization strategy, in which nodes only localize when the sensor
network is being used to track an object, may suffice. This approach has the benefit
of consuming energy only when the nodes have a reason to localize.
Consider the following scenario. A set of sensor network nodes are deployed into
a region at unknown locations. A friendly (or unfriendly) target travels through the
sensor network in a structured (or random) walk. The nodes determine the distance
between themselves and their neighboring nodes using the techniques described in
this paper. Once the node-to-node distances have been estimated, any one of the
available range-based localization algorithms may be used to determine the position
of the nodes. Once localized in this manner, the nodes can multilaterate the location
of targets and report this information if needed.
26

CHAPTER 3
THE EXTREME SCALE MOTE (XSM)
We present the requirements, design, and performance of the eXtreme Scale Mote
(XSM). This new mote is an integrated application-specific sensor network node for
investigating reliable, large-scale, and long-lived surveillance applications. The im-
proved reliability stems from hardware and firmware support for recovering from
Byzantine programs. Large-scale operation is better supported through an improved
hardware user interface and remote tasking. Long-lived operation is realized through
the use of adaptive low-power sensors and a hierarchical and event-driven signal pro-
cessing architecture. The motivating surveillance application is the detection, classi-
fication, and tracking of civilians, soldiers, and vehicles. Performed under the aegis
of the DARPA NEST Extreme Scale 2004 Minitask, a fundamental goal of this work
is to demonstrate operation of a wireless sensor network at the heretofore unprece-
dented and extreme scale of 10,000 nodes occupying a 10km2 area and for a duration
approaching 1000 hours. Operation at such scales make it impossible to manually ad-
just parameters, repeatedly replace batteries, or individually program sensor nodes.
These severe constraints were selected to “kick the crutches out” and had the intended
effect of elevating to first-class status several factors, such as reliability, usability, and
27

lifetime, which might otherwise have become afterthoughts. Another very real con-
straint was cost since every decision was amplified by a multiple of 10,000. Some of
the more innovative ideas did not survive budgetary scrutiny and were not included
in either the XSM design or in this work.
3.1 Related Work
The design of the XSM was principally influenced by three areas of related work
including data collection and event detection applications, sensor network platforms,
and low-power signal processing and wakeup circuit design.
3.1.1 Applications
A number of recent works have reported on the design, implementation, and
fielding of wireless sensor networks for intrusion detection and response. These works
identify many practical lessons which were incorporated into this work.
In, [2] and [3], Pottie, et.al. identify tradeoffs in detection and communications,
ideas for network management, and scalable network architectures. The first of the
two papers identifies the important question of hierarchy of signal processing func-
tionality and advocates aggressively managing power at all levels.
In [6], West, et.al., present the challenges and tradeoffs for dense spatio-temporal
monitoring of the environment and compare the characteristics of military surveil-
lance and environmental monitoring, which are representative of event detection and
data collection, respectively. The characteristics of military surveillance applica-
tions include performance-driven, mobile sensor nodes, dynamic physical topology,
28

distributed detection/estimation, event-driven/multi-tasking, and real-time require-
ments. The characteristics of environmental monitoring applications include cost-
driven, fixed sensor nodes, static physical topology, spatio-temporal sampling, sched-
uled signel tasks, and delays acceptable/preferable. The focus of the work is on
environmental monitoring so there is limited discussion of military surveillance appli-
cations. This application uses the Wisard sensor network platform.
In [8], Polastre provides a detailed case study of a habitat monitoring application
and identifies several performance metrics and design considerations. For example, it
is this work that demonstrates network lifetimes on the order of a year and sampling
rates on the order of one sample per second. Since the work provides so many useful
details, it serves as an exemplar data collection design point. This application uses
the Mica, Mica2Dot, and custom sensorboards for the sensor platform.
In [10], He, et.al., describe the design and implementation of a running system for
energy-efficient surveillance. This work demonstrates the effectiveness of trading off
energy-awareness and surveillance performance by adaptively adjusting the sensitivity
of the system. The results show that the surveillance strategy is adaptable and
achieves a significant extension of network lifetime. The paper also outlines some
lessons learned including false alarm reduction and software calibration of sensors.
This application uses both the RadarMote and the Mica2 plus Mica SensorBoard for
its sensor network platform.
In [12], Arora, et.al., report on an intrusion detection system using sensor networks
and provide a set of performance metrics including latency and probabilities of detec-
tion, false alarm, classification and misclassification, as well as design considerations
including reliability, energy, and complexity. Like [8], this work provides many useful
29

details and serves as an exemplar event detection design point. This application uses
as its sensor node both the RadarMote and the Mica2 plus Mica SensorBoard.
Sharp, et.al., designed and implemented a sensor network system for vehicle track-
ing and autonomous interception [17]. This distributed pursuer-evader game demon-
strates a networked system of distributed sensor nodes that detects an uncooperative
agent and assists an autonomous robot in capturing the evader. Practical issues such
as node breakage, packaging decisions, in situ debugging, network reprogramming,
and system reconfiguration are addressed. This application uses the PEGSensor node
which is consists of the Mica2Dot and a set of custom SensorBoards.
3.1.2 Platforms
A number of platforms/sensorboards have been developed to support wireless
sensor network research and development. Research platforms tend to be optimized
either for narrow and domain-specific applications or are so general that they are
not able to address key application constraints. Modular platforms and sensorboards
help in this regard but this problem is endemic to embedded systems in general.
• Mica2 The Mica2 design is an improvement over the Mica design. The Mica2
uses a higher a performance microcontroller and radio. The microcontroller
core is essentially backward compatible with the Mica microcontroller but the
radio uses a different modulation scheme and frequency band. Some recently
introduced experimental platforms that are commercially available include:
• Mica2Dot: The Mica2Dot is a minimalist implementation of the Mica2 in a
quarter-dollar-sized footprint.
30

• MicaZ: The MicaZ uses the same microcontroller as the Mica2 but replaces the
Mica2’s radio with a higher performance radio that supports the IEEE 802.15.4
physical layer standard.
• Telos: The Telos design uses the Chipcon CC2420 radio which allows interop-
erability between the Telos and MicaZ platforms. However, Telos uses the Texas
Instruments MSP430 microcontroller due to its lower-power operation and faster
wakeup latency compared to the Atmel ATMega128L microcontroller used in
the Mica2, Mica2Dot, and MicaZ.
We observe that no widely-available experimental platform supports the passive
vigilance, or very low-power continuous awareness, required for long-lived event de-
tection.
3.1.3 Circuits
Several circuits have been proposed for low-power signal processing, event detec-
tion, and wakeup triggering including:
• Micropower Spectrum Analyzer: In [18], Dong, et.al., presents a single-chip
VLSI spectrum analyzer implemented in 0.8µ HPCMOS using 45,000 transis-
tors. The system operates with a 1µA drain current at a 3V supply bias at a
200 samples/second processing rate.
• Acoustic Wakeup: In [19], Goldberg, et.al., describe a low-power VLSI wakeup
detector for use in an acoustic surveillance sensor network.
• Radio Wakeup: In [11], Gu and Stankovic describe radio-triggered wakeup
capability as a power management technique for prolonging the lifespan of sensor
31

networks. While it is not clear that the design presented in this paper will work
in practice, the concept of a wakeup radio extends the event-driven hierarchy
further into hardware, complementing the event-driven operating system, and
allowing for node lifetimes to approach 180 days.
3.2 Application Requirements
This work was motivated by the requirements of a typical ground surveillance
application. The functional requirements of such an application include detecting a
breach along a perimeter or within a region, classifying the target causing the breach,
and tracking the target’s position as it moves through the sensor network. Our spe-
cific application scenario focuses on unattended ground sensors for military surveil-
lance. We detail functional, usability, reliability, performance, and supportability
requirements in the following sections. Other possible realizations of this application
scenario include border surveillance, pipeline monitoring, and roadway right-of-way
protection.
3.2.1 Functionality
Functional requirements are used to express the behavior of a system by specifying
both the input conditions and output conditions that are expected to result. From
an operational perspective, the XSM design was motivated by the functional require-
ments of detection, classification, and tracking of civilians, soldiers, and vehicles:
Detection: Detection requires that the system discriminate between a target’s
absence and presence. Successful detection requires a node to correctly estimate a
target’s presence while avoiding false detections in which no targets are present. The
key performance metrics for detection include the probability of correct detection, or
32

PD and the probability of false alarm, or PFA. The goal, of course, is to maximize
PD and minimize PFA for a given level of sensing, computation, and communication.
However, PD and PFA are often positively correlated. That is, PD and PFA simulta-
neously increase or decrease. As a consquence, many systems specify an acceptable
PFA and achieve the best possible PD given the PFA.
Classification: Classification requires that the target type be identified as be-
longing to one of the classes of civilian, soldier, or vehicle. The key performance
metrics for classification are the probability of correctly classifying (labeling) the i-th
class, PCi,i, and the probability of misclassifying the i-th class as the j-th class, or
PCi,j.
Tracking: Tracking involves maintaining the target’s position as it evolves over
time due to its motion in a region covered by the sensor network’s field of view.
Successful tracking requires that the system estimate a target’s initial point of entry
and current position with modest accuracy and within the allowable detection latency,
TD. Implicit in this requirement is the need for target localization. The tracking
performance requirements dictate that tracking accuracy, or the maximum difference
between a target’s actual and estimated position, be both bounded and specified,
within limits, by the user. The system is not required to predict the target’s future
position based on its past or present position.
3.2.2 Usability
Usability requirements cover human factors like aesthetics, ease of learning, and
ease of use, as well as consistency in the user interface, user documentation, and
training materials.
33

One-touch Operation: The basic theme underlying the user interface require-
ments is “one-touch” operation. For example, waking up a deeply-sleeping node
should require no more than a single touch. Similarly, resetting a running node, veri-
fying that a node is operating, and putting an operating node to sleep should require
no more than a simple touch.
Form-factor: The XSM nodes had to be fully-self-contained to ensure they were
robust and so that they could be deployed easily. The node form-factor had to support
tight packaging which would leave little wasted space.
3.2.3 Reliability
Reliability requirements cover frequency and severity of failure, recoverability,
predictability, and accuracy.
Retaskable: The system retasking requirement called for multi-hop wireless net-
work reprogramming. A multi-hop wireless network reprogramming algorithm allows
a sensor node (the “old node”) to be reprogrammed without direct (i.e. one-hop)
radio communications to a node which holds a new program image (the “new node”)
as long as there are intermediate old nodes which provide connectivity between any
old node and at least one new node.
Recoverable: The system recoverability requirement meant that the nodes could
be recovered and reprogrammed even if a pathologic (i.e. Byzantine) program was
downloaded. Most inexpensive and low-power microcontrollers do not provide a pro-
tected mode of operation. Consequently, it becomes possible for application code
to take nearly complete control over the hardware, disable timers, turn off inter-
rupts, and leave the operating system with no mechanism to preempt a misbehaving
34

application. Hijacking of the operating system can occur either accidentally or inten-
tionally. Recoverable hardware implies a protection mechanism to guarantee trusted
code eventually regains control.
3.2.4 Performance
Performance requirements impose conditions on functional requirements – for ex-
ample, a requirement that specifies the transaction rate, speed, availability, accuracy,
response time, recovery time, or memory usage with which a given action must be
performed:
Lifetime: The system lifetime requirement is 1000 hours (or over a month) of
continuous operation on two series-connected AA-sized batteries which can deliver
approximately 6000mWhr of energy. This translates to an average power budget
of approximately 6mW and an average current consumption of 2mA. While sensor
networks for data collection may allow sensor nodes to sleep most of the time, intrusion
detection requires that sensors be awake, or at least passively vigilant, most of the
time since targets may be present for very short durations. None of the commercially
available sensorboards could detect all of our target classes and meet the lifetime
requirements of our application. Consequently, this requirement implied that a new
and more energy-efficient sensor node design was required. Our design adopts a signal
processing hierarchy and extends the event-driven model into the sensing and signal
conditioning hardware, allowing the processor to sleep most of the time.
Latency: The allowable latency or delay, TD, between a detecting a target’s
presence and reporting the target’s presence to an exfiltration agent.
35

Coverage: The sensor network needs to operate over an area of 10km2. With
10,000 nodes and assuming 1-coverage, each sensor node would need to cover 1,000m2.
This translates to an minimum sensing range approaching 20m for all target classes.
The implication of this requirement is that since none of the commercially-available
experimental platforms that meet our power budget can achieve the required sensing
range or even detect all of our target classes, this requirement reinforced the need
for a new and more energy-efficient sensor node design that additionally supported a
long sensing range.
3.2.5 Supportability
Supportability requirements cover testability, maintainability, and the other qual-
ities required for keeping the system up-to-date after its release. Supportability re-
quirements are unique in that they are not necessarily imposed on the system itself,
but instead often refer to the process used to create the system or various artifacts
of the system development process. An example is the use of a specific C++ coding
standard.
Adaptive: The sheer size of the sensor field guarantees a heterogeneous en-
vironment while the number of nodes precludes manual adjustment of parameters.
Therefore, the nodes require mechanisms to adjust their sensor sensitivities, detec-
tion thresholds, and other similar parameters dynamically and autonomously. The
implication of this requirement is the sensing and signal conditioning hardware needs
to support electronic adjustment of filter cutoffs, amplifier gains and offsets, and
comparator thresholds, all under program control.
36
Backward-compatibility: A key requirement of the XSM was backward-compatibility
with Mica2-platform. The motivation behind this requirement was to reduce the risk
of bringing up a new platform. During [10, 12], researchers changed from the Mica
to the Mica2 platform. This change involved switching from the Atmel ATmega103L
to the ATmega128L microcontroller and from the RF Monolithics TR1000 radio to
the Chipcon CC1000 radio. These changes required considerable TinyOS support in
the form of new drivers and a completely new radio stack. While the changes were
worthwhile in retrospect, they came at the cost of uncertaintly, expensive debugging,
and schedule slip while the platform stabilized over the course of a few months. Con-
sequently, we were biased against introducing more uncertainty than necessary for
this new platform. We recognized substantial changes were necessary on the sensing
and platform support subsystems, so based in a large part on the reports from earlier
experiences with switching platforms, we opted to keep the Mica2 platform (i.e. the
processor and radio) for the XSM. A more general notion of backward-compatibility
required the platform to run TinyOS and also expose most of the key signals via the
51-pin connector that is standard on many motes.
3.3 Platform
The XSM, shown in Figure 3.1, integrates a platfrom with a suite of sensors. In
the TinyOS community, “platform” has come to mean the microcontroller, memory,
and radio subsystems, as well as supporting hardware like power management or
timekeeping but not the sensing and signal conditioning hardware or packaging. In
keeping with this tradition, this section discusses the processor, radio, and supporting
subsystems.
37

Figure 3.1: Top view of XSM (version 2).
3.3.1 Processor
Due to the Mica2-compatibility requirement, the XSM processor subsystem is
almost identical to that found in the Mica2 and Mica2Dot motes. There are two
minor changes which were incorporated due to supportability reasons. A versioning
system now allows the software to dynamically determine the hardware revision on
which the software is executing. In addition, the ADC reference voltage, AREF, is
under software control in the XSM rather than being hardwired to AVCC as in the
38

Mica2. It makes sense to leave the ADC AREF signal unconnected from AVCC for a
number of reasons. One reason is the MCU provides a facility to make this connection
under software control by setting the ADMUX.REFS0 to 1 and ADMUX.REFS1 to
0. This is easily done in the hardware presentation layer. Another reason is greater
flexibility: the source of the ADC reference can be selected under software control to
be either AVCC or an internally generated 2.56V. A third reason is that by leaving the
external AREF unconnected, the possibility of accidentally damaging the processor
by shorting the external AREF to either AVCC or the internal 2.56V reference by
setting ADMUX.REFS0 to 1 is eliminated. Either of these connections would cause
a problem if the external AREF was not the same as AVCC or 2.56V.
3.3.2 Radio
In keeping with the requirement of Mica2-platform compatibility, the radio sub-
system, like the processor, is nearly identical to the Mica2 family. However, there are
two issues with the Mica2 radio design which are addressed in the XSM design.
The first issue with the Mica2 design is anisotropic radio propagation. This
anisotrophy results in non-uniform radio connectivity as a function of orientation
of the Mica2 mote. A second problem that was reported with the Mica2 platform
was an impedance mismatch between the antenna and radio. Such a mismatch can
cause RF energy to get reflected from the radio-antenna junction, rather than coupled
into the antenna and radiated, resulting is diminished communications range.
In [20], Zhao, et.al, report greater than 5dBm difference in the maximum and
minimum received signal strength indicator at a distance of 10ft and nearly 8dBm
at 20ft, as a function of the direction in the plane, for the Mica2 radio. In other
39
experiments, a 40% stronger signal has been observed at a 10m range in the direction
of the Mica2 power switch than in the opposite direction of the MMCA antenna
connector with the motes approximately 10cm off the ground [21]. Radio anisotropy
impacts media access and control, RSSI-based range estimation, localization, routing,
and other algorithms.
A quarter-wave monopole constructed from a piece of wire is the predominant
antenna style in use on Mica2 motes. Theoretically, a monopole antenna has uniform
directionality in the plane normal to the axis of the antenna, However, a quarter-
wave monopole antenna also expects an infinite ground plane. In practice, a small
and approximately uniform ground plane is used when directionality is important.
However, in the case of the Mica2, the antenna is located near one corner of the 1.25”
by 2.25” circuit board. Hence, a ground plane is exists for only 90 degrees in the plane
and principally in the direction toward the power switch. Our hypothesis is that the
shape and size of the circuit board and the location of the antenna contribute the
most to radio irregularity observed in the Mica2 mote.
To achieve a more isotrophic radiation pattern on the XSM, we place the antenna
in the middle of the circuit board, ensuring a largely uniform ground plane in all
directions. Since the XSM circuit board is larger than the Mica2, we also benefit
from a larger, though still not infinite, ground plane.
The second issue with the Mica2 design is a radio-antenna impedance mismatch.
While impedance mismatches are due to many underlying factors, individually ad-
dressing each factor that contributes to the mismatch is a challenge, especially when
some of the factors are coupled. Consequently, we adopt a lumped-parameter ap-
proach to correcting the impedance mismatch. Such an approach does not obviate
40
the need for careful transmission line placement or antenna selection. Instead, we se-
lect compensation components to reduce or eliminate the mismatch after the circuit
board, enclosure, antenna, and target environment is finalized. To support this ability
to correct the mismatch, pads and traces are present for a compensating capacitor
and inductor.
Initial experiments with the XSM radio hardware indicates that the platform has
better RF characteristics than the Mica2. Figure 3.2 shows the output power of
both the XSM and Mica2, programmed to transmit continuously with at a power
level of 10dBm. The XSM shows a slightly cleaner signal and higher channel power.
The second version of the XSM (labeled “XSM2” in Figure 3.2), incorporates several
improvements including an impedance matching circuit. The output power is shown
to vary for different inductor values. Unfortunately, the XSM radio outputs greater
power than the XSM2. The correct values of the compensation inductor and capacitor
should fix this problem, however, at the time this work was written, these values had
not been identified.
In another experiment, the impedance matching characteristics of the two plat-
forms are highlighted by comparing the transmitted (absorbed) and reflected power
from the antenna into the the motes. Figure 3.3 shows reflected power from injecting
a small signal into the antenna port and radio on the two motes. The injected signal
is swept across a range spanning 433MHz±25MHz and with output power set as the
reference at 0dB. The XSM reflects less power than the Mica2. At 433MHz, the
XSM reflects about 3dB less than the Mica2. The initial XSM2 compensation circuit
performed more poorly than either the Mica2 or the XSM. However, by varying the
compensation inductor, we were able to reduce the amount reflection in the RF path
41

432.85 432.9 432.95 433 433.05 433.1 433.15 433.2 433.25−40
−35
−30
−25
−20
−15
−10
−5
0
5
10
Frequency (MHz)RBW: 10 kHz, VBW: 3kHz
Out
put p
ower
(dB
m)
Transmit output power, 10 dBm nominal
Mica2, Anritsu MS2711B (4/13/04), channel power: 11.32 dBmXSM, Anritsu MS2711B (4/13/04), channel power: 13.07 dBmXSM2, Advantest R3131A (7/29/04), channel power: 6.06 dBmXSM2 L2=36nH, channel power: 8.7 dBmXSM2 L2=39nH, channel power: 8.1 dBmXSM2 L2=43nH, channel power: 7.6dBm
Figure 3.2: Comparison of radio transmit output power for the Mica2, XSM, andXSM2. Source: J. Polastre, C. Sharp, and R. Szewczyk, U.C. Berkeley.
42
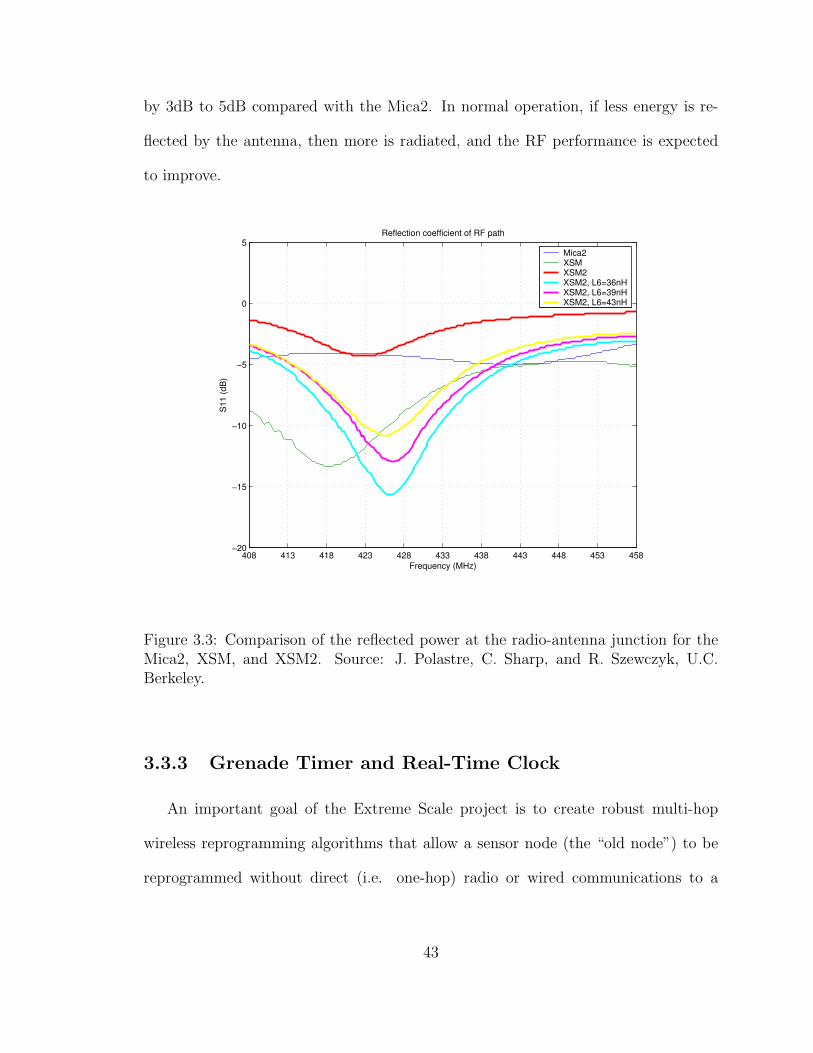
by 3dB to 5dB compared with the Mica2. In normal operation, if less energy is re-
flected by the antenna, then more is radiated, and the RF performance is expected
to improve.
408 413 418 423 428 433 438 443 448 453 458−20
−15
−10
−5
0
5Reflection coefficient of RF path
Frequency (MHz)
S11
(dB
)
Mica2XSMXSM2XSM2, L6=36nHXSM2, L6=39nHXSM2, L6=43nH
Figure 3.3: Comparison of the reflected power at the radio-antenna junction for theMica2, XSM, and XSM2. Source: J. Polastre, C. Sharp, and R. Szewczyk, U.C.Berkeley.
3.3.3 Grenade Timer and Real-Time Clock
An important goal of the Extreme Scale project is to create robust multi-hop
wireless reprogramming algorithms that allow a sensor node (the “old node”) to be
reprogrammed without direct (i.e. one-hop) radio or wired communications to a
43

node which holds a new program image (the “new node”). We argue that robust-
ness consists of two aspects for the case of wireless reprogramming: reliability and
recoverability. Reliabilty refers to the property that all old nodes within direct or in-
direct radio communications with a new node eventually will acquire the new image.
Recoverability refers to the property that regardless of the program image executing
on an old node, the old node will always (eventually) upgrade to the version that a
new node is running. In other words, an incorrect or Byzantine program can never
permanently disable an node from being reprogrammed with a newer image.
A number of algorithms have been proposed for providing over-the-air or multi-hop
wireless reprogramming functionality including the Crossbow In-Network Program-
ming (XNP) [22], Trickle [23], Multi-hop Over-the-Air Programming (MOAP) [24],
and Deluge [25]. All of these algorithms make certain assumptions about their oper-
ation. Chief among these assumptions is that the algorithm itself is actually invoked.
However, as we show in this section, such an assumption cannot be guaranteed on
the existing Mica2 platform and consequently the recoverability property cannot be
guaranteed either.
In a traditional preemptive operating system that runs on hardware support-
ing protected modes of operation, a timer is used to ensure the operating system
maintains control of the processor. Before turning over control of the processor to
application code running in user mode, the operating system sets a timer to interrupt
the processor. When the timer interrupts, control is returned to operating system.
Instructions that modify the operation of the timer are privileged, ensuring that such
instructions can be executed only in protected mode by the operating system [26].
44

The fundamental problem in our case is that like most 8-bit microcontrollers,
the Atmel ATmega128L processor used in the XSM and Mica2 platforms does not
provide a true protected mode of operation. Consequently, it becomes possible for
application code to take nearly complete control over the hardware, disable timers,
turn off interrupts, and leave the operating system with no mechanism to preempt a
misbehaving application. Hijacking of the operating system can occur either acciden-
tally or intentionally. A description of the basic hijacking problem, and one solution
to it, can be found in [27].
At the time of this work, the standard mode of compiling wirelessly reprogrammable
applications under TinyOS is to create a monolithic program image consisting of the
operating system, a wireless reprogramming component, and the user application.
These three components are expected to co-exist in cooperative harmony. There
are many ways to permanently disable wireless reprogramming under this scheme.
Simply downloading an application like “Blink” that does not include the wireless
reprogramming module at all is one way:
/opt/tinyos-1.x/apps/Blink
$ make mica2 install
In this case, the basic ability to wirelessly reprogram is altogether lost. Inserting an
atomic block that never exits works as well:
atomic while (TRUE)
And for the more robust operating system that makes use of the watchdog timer,
the following code will globally disable all interrupts, and loop endlessly, clearing the
watchdog timer. This approach is a slight variation on the previous example:
cli
loop: wdr
jmp loop
45
The problem in the last example is that when interrupts are disabled and the watchdog
timer is cleared periodically, there is no mechanism for the operating system to regain
control. Even if the interrupt vectors are all in a protected code segment, the cli, wdr,
and jmp are fairly common instructions so just their presence in code is not unusual,
especially in interrupt handlers. As a result, it appears non-trivial to “automatically”
detect rogue code. Consider the following “seemingly” normal program that seems
to loop until something happens (but R and b can be chosen such that nothing ever
happens):
cbi R,b
cli
loop: wdr
...
sbis R,b
jmp loop
sei
Atmel has provided a rich set of features making the ATmega128L microcontroller
in-application programmable. Atmel even provides a “quasi-protected” mode of op-
eration that, when enabled through various combinations of fuse settings, makes it
impossible for application code to modify the bootloader or interrupt vectors and
handlers. However, while these features can protect the bootloader and the interrupt
vectors and handlers from the application code, and even the application code from
itself, the features do nothing to guarantee that control eventually returns to trusted
code like the bootloader.
Unfortunately, there is no facility on the ATmega128L to guarantee that execution
eventually returns to trusted code. Furthermore, since it is impractical to hand-
reprogram 10,000 nodes in the event that a misbehaving image is downloaded, we
choose to implement a grenade timer similar to the one described in [27]. A grenade
46
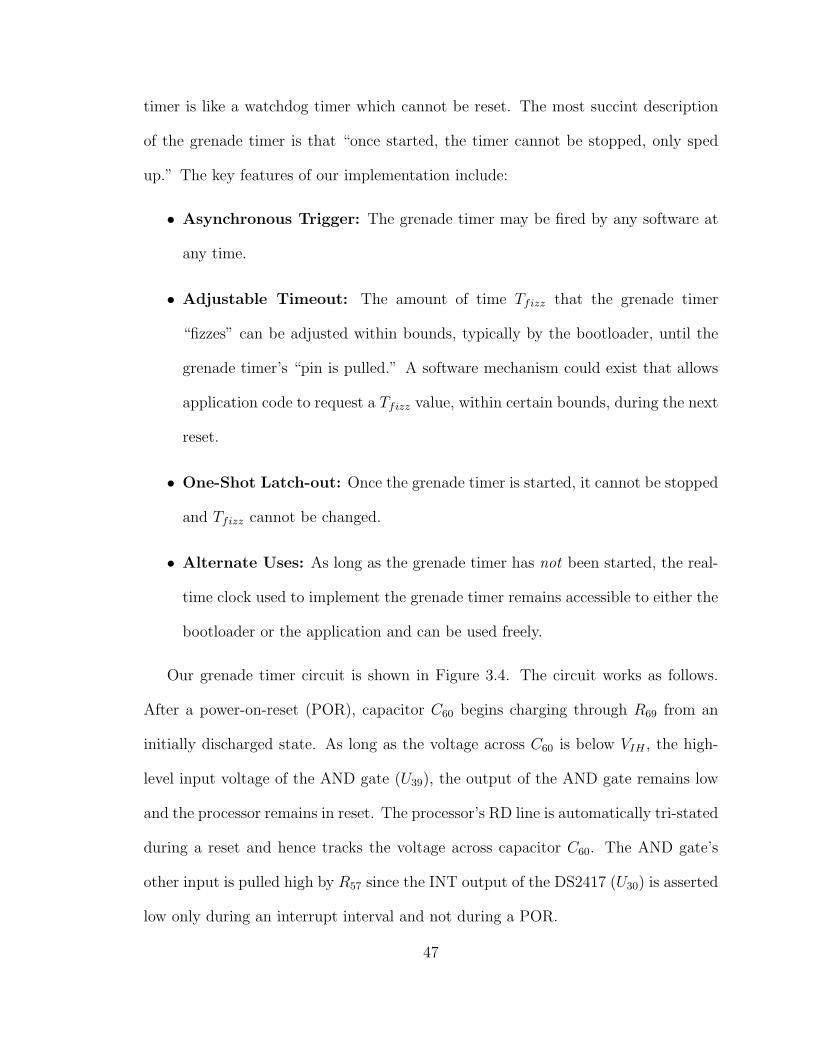
timer is like a watchdog timer which cannot be reset. The most succint description
of the grenade timer is that “once started, the timer cannot be stopped, only sped
up.” The key features of our implementation include:
• Asynchronous Trigger: The grenade timer may be fired by any software at
any time.
• Adjustable Timeout: The amount of time Tfizz that the grenade timer
“fizzes” can be adjusted within bounds, typically by the bootloader, until the
grenade timer’s “pin is pulled.” A software mechanism could exist that allows
application code to request a Tfizz value, within certain bounds, during the next
reset.
• One-Shot Latch-out: Once the grenade timer is started, it cannot be stopped
and Tfizz cannot be changed.
• Alternate Uses: As long as the grenade timer has not been started, the real-
time clock used to implement the grenade timer remains accessible to either the
bootloader or the application and can be used freely.
Our grenade timer circuit is shown in Figure 3.4. The circuit works as follows.
After a power-on-reset (POR), capacitor C60 begins charging through R69 from an
initially discharged state. As long as the voltage across C60 is below VIH , the high-
level input voltage of the AND gate (U39), the output of the AND gate remains low
and the processor remains in reset. The processor’s RD line is automatically tri-stated
during a reset and hence tracks the voltage across capacitor C60. The AND gate’s
other input is pulled high by R57 since the INT output of the DS2417 (U30) is asserted
low only during an interrupt interval and not during a POR.
47
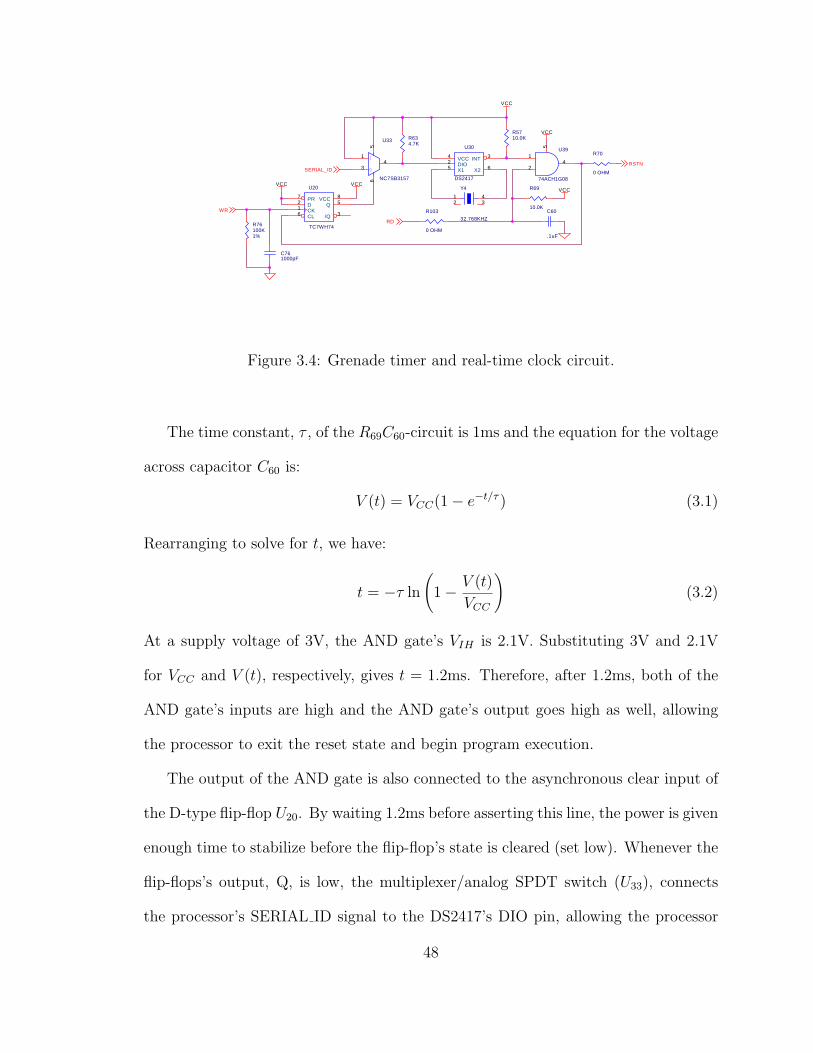
5
5
4
4
3
3
2
2
1
1
D D
C C
B B
A A
ADC1ADC[0..7]
VCC
VCC
VCCVCC
VCC
VCC
SERIAL_ID
WR
RSTN
RD
PWM0
THERM_PWR
Title
Size Document Number R ev
Date: Sheet o f
EXCEPT AS MAY BE OTHERWISE PROVIDED BY CONTRACT, THISDRAWING OR SPECIFICATION IS THE PROPRIETARY PROPERTY OFCROSSBOW TECHNOLOGY INC. IT IS ISSUED IN STRICT CONFIDENCEAND SHALL NOT BE REPRODUCED OR COPIED OR USED (PARTIALLYOR WHOLLY) IN ANY MANNER WITHOUT PRIOR EXPRESS WRITTENAUTHORIZATION OF CROSSBOW TECHNOLOGY INC.
DATEDWN
CHK
APRVD
APRVD 6310-0336-02 A
XSM100CA XTREME SCALE MOTE
Crossbow Technology41 Daggett Drive San Jose, CA. 95134
B2 8Monday, June 14, 2004
X
XX/XX/XX
5-14-04
XX/XX/XX
P. DUTTA
X
M. GRIMMER 5-14-04
POWER/ACCEL/LEDS
remove switch
OHIO STATE UNIVERSITY AND CROSSBOW
U30
DS2417
DIO2
X2 6
INT 3VCC4
X15
C761000pF
SW1
SPDT
12
3
R76100K1%
1
0
U33
NC7SB3157
3
1
65
4
RT1
10K
C16.1uF C60
.1uF
R103
0 OHM
R66
10.0K
Y4
32.768KHZ
21
34
R211K
R20
0 OHM
R70
0 OHM
R64
PHOTO
J6
HDR 2 X 1 X .1
1 1
2 2
R69
10.0K
U20
TC7WH74
D2
CK1Q 5
/Q 3
VCC 8PR7
CL6
R5710.0KR63
4.7K
C15.1uF
U39
74ACH1G08
1
24
5
Figure 3.4: Grenade timer and real-time clock circuit.
The time constant, τ , of the R69C60-circuit is 1ms and the equation for the voltage
across capacitor C60 is:
V (t) = VCC(1− e−t/τ ) (3.1)
Rearranging to solve for t, we have:
t = −τ ln
(1− V (t)
VCC
)(3.2)
At a supply voltage of 3V, the AND gate’s VIH is 2.1V. Substituting 3V and 2.1V
for VCC and V (t), respectively, gives t = 1.2ms. Therefore, after 1.2ms, both of the
AND gate’s inputs are high and the AND gate’s output goes high as well, allowing
the processor to exit the reset state and begin program execution.
The output of the AND gate is also connected to the asynchronous clear input of
the D-type flip-flop U20. By waiting 1.2ms before asserting this line, the power is given
enough time to stabilize before the flip-flop’s state is cleared (set low). Whenever the
flip-flops’s output, Q, is low, the multiplexer/analog SPDT switch (U33), connects
the processor’s SERIAL ID signal to the DS2417’s DIO pin, allowing the processor
48
to communicate with the DS2417, a real-time clock with a built-in timer. To start
the grenade timer, the bootloader loads the value of Tfizz into the DS2417 using the
Dallas 1-wire bus (SERIAL ID) and enables the device. The legal Tfizz values are:
1s, 4s, 32s, 64s, 2048s (34.13min), 4096s (68.27min), 65,536s (18.30hrs), and 131,072s
(36.41hrs).2
The bootloader or application code can start the grenade timer and ensure that
the no subsequent operation can alter or disable the grenade timer, by enabling the
processor’s WR line for output and asserting it high. Doing so creates a low-to-
high transition which has the effect of clocking the positive edge-triggered flip-flop.
Once clocked, the flip-flop output, Q, assumes the value of its input, D. Since D is
tied to VCC , the value of Q goes after the first clock and remains high until it is
asynchronously cleared.
Once Q is high, the multiplexer/analog SPDT switch (U33), disconnects or “latches
out” the processor from communicating with the DS2417. No additional clocking can
reverse this latch-out of the processor until the next DS2417 interrupt occurs or the
processor asserts RD low, both of which asynchronously clears the D flip flop, resets
the processor, and returns control to the bootloader. We note that if neither the
bootloader nor the application code asserts WR high, the DS2417 remains accessible
to the processor and can be used as a real-time clock.
We note that Atmel could have provided nearly equivalent functionality by includ-
ing a fuse setting that disabled non-bootloader control of a timer and its interrupt.
Alternately, Atmel could have provided a non-maskable external interrupt (i.e. an
2These values correspond to the U30’s interval select register IS〈2 : 0〉 values of 000 to 111,respectively. The processor must also enable U30’s oscillator by writing OSC〈1 : 0〉 = 11 and settingthe interrupt enable register, IE, by writing a 1 to this register. After this sequence of operations,the DS2417 will be configured to assert INT low for 122µs every Tfizz seconds.
49
interrupt that cannot be disabled at all). A non-maskable interrupt, when coupled
with the bootloader protection mechanisms and an external source of interrupts, could
have provided a more suitable quasi-protected mode. We do recognize that in certain
embedded applications, all interrupts are legitimately disabled during execution of
the interrupt handler for a variety of quite valid reasons. However, we argue that it
is reasonable to assume that an upper bound exists on the amount of time that any
interrupt handler, or atomic code block, is executing within a critical section. If this
upper bound can be expressed in clock cycles, we envision that a write-once register
could be used to store the maximum amount of time allowed between a non-maskable
interrupt being triggered and either enabling interrupt or execution control being
forcibly transferred to the non-maskable interrupt handler. Perhaps such features,
which can be found in some processors today, will become more common in future
microcontrollers.
The grenade timer can guarantee that the bootloader eventually regains control
of the processor. By properly setting the processor’s fusemap, the bootloader and the
interrupt vectors and handlers can be protected from the application code. However,
we have not yet discussed what the bootloader must do to recognize an outdated (and
perhaps misbehaving) image and recover by either reverting to an earlier image or
downloading a newer image. Those topics will be covered in a later section.
3.3.4 Network Bootloader
Our notion of a network bootloader works in conjuction with the grenade timer to
implement the retaskability and recoverability requirements. The bootloader consists
of a minimal network stack, a network reprogramming module, the grenade timer
50
drivers, and a small application. This bootloader should be factory programmed onto
the XSM and the fuses should be set such that the bootloader can be erased only by
manual reprogramming. The bootloader is responsible for the following operations:
• Version Checking: Check the version of the currently running application
image. The current image’s version number should be stored in an area of
non-volatile memory that is protected from the application code.
• Availability Checking: Check with neighboring nodes for a newer version of
the application image by broadcasting a request and listening for a response.
• Download: Initiate the downloading of a new application image, if any, from
a neighboring node. Keep track of the application image version in boot flash
rather than in the application image or application adjustable memory.
• Integrity Checking: Verify the integrity of a new application image and its
version number through a message authentication code.
• Programming: Move or copy the newly downloaded application image to
make it the default image.
• Arm Grenade Timer: Enable and arm the grenade timer to reset the proces-
sor in time Tfizz.. Disable any further operations on the grenade timer through
the latch-out feature.
• Load Application: Jump to the application entry point and begin execution.
In addition to the responsibilities of the bootloader, the compiler/linker needs to
be configured to relocate the interrupts vectors into a protected region of memory
51
(in particular, the RESET vector) and to generate application images which have a
non-zero entry point.
3.3.5 User Interface
The XSM user interface includes two buttons, three LEDs, a sounder, and a 51-
pin programming port. The RESET button is connected to the processor’s reset line
and depressing this button causes the processor to enter a reset state and releasing
this button allows the processor to begin program execution. The USER button is
connected to a processor interrupt line and requires an interrupt handler to process
the button pushes. Although user applications may modify the availability or func-
tionality of the USER button, the designer’s intent is for this button to serve as a
multi-function input that works in conjuction with the RESET button.
The default configuration of the XSM does not include an ON/OFF power switch.
While this design choice appears to violate generally accepted design principles, we
believe that in this case the choice is warranted. Since the XSM was designed for
use in an experimental network of 10,000 nodes, we wanted to minimize the number
of things which could go wrong including, for example, accidentally deploying nodes
with the power switch set to the OFF position. Another motivation was that we never
imagined that the nodes would be truly turned off in our application. Instead, the
nodes could exhibit various degrees of vigilance ranging from fully awake to deeply
asleep. We did recognize that for research and development purposes, a missing
power switch is just plain annoying. Consequently, we included circuit board pads
and traces so users could populate the power switch after market. The final motivation
for eliminating the power switch was cost.
52

The sounder subsystem includes a transducer capable of producing 98dB in the
4kHz to 5kHz acoustic range. The transducer is driven by an op amp that is pow-
ered from a dual-output charge pump which generates ±2 × VCC . The piezo trans-
ducer’s oscillation frequency is software-controllable but the transducer performs best
at 4.5kHz.
3.4 Sensors
Sensor selection is a fundamental task in the design of a wireless sensor node.
Choosing the right mix of sensors for the application at hand can improve discrim-
inability, reduce density, increase lifetime, simplify deployment, reduce computational
complexity, and lower probability of discovery – in short, improve performance.
Despite the plethora of available sensors, no primitive sensors exist that detect
people, vehicles, or other potential objects of interest. Instead, sensors are used to
detect various features of the targets like thermal or ferro-magnetic signatures. It
can be inferred from the presence of these analogues that, with some probability,
the target phenomenon exists. However, it should be clear that this estimation is an
imperfect process in which multiple unrelated phenomena can cause indistinguishable
sensor outputs. Additionally, all real-world signals are corrupted by noise which
limits a system’s effectiveness. For these reasons, in addition to sensor selection, the
related topics of signal detection, parameter estimation, and pattern recognition are
important [28, 29, 30].
Although several factors contributed to our final choice, the target phenomenolo-
gies (i.e. the perturbations to the environment that our targets are likely to cause)
drove the sensor selection process:
53

• Civilian: A civilian is likely to disrupt the environment thermally, seismically,
acoustically, electrically, chemically, and optically. Human body heat is emitted
as infra red energy omnidirectionally from the source. Human footsteps are im-
pulsive signals that cause ringing at the natural frequencies of the ground. The
resonant oscillations are damped and propagated through the ground. Footsteps
also create impulsive acoustic signals that travel through the air at a different
speed than the seismic effects of footsteps travel through the ground. A person’s
body can be considered a dielectric that causes a change in an ambient electric
field. Humans emit a complex chemical trail that dogs can easily detect and
specialized sensors can detect certain chemical emissions. A person reflects and
absorbs light rays and can be detected using a camera. A person also reflects
and scatters optical, electromagnetic, acoustic, and ultrasonic signals.
• Solder: An armed soldier is likely to have a signature that is a superset of
an unarmed person’s signature. We expect a soldier to carry a gun and other
equipment that contains ferromagnetic materials. As a result, we would expect
a soldier to have a magnetic signature that most civilians would not have. A
soldier’s magnetic signature is due to the disturbance in the ambient (earth’s)
magnetic field caused by the presence of such ferromagnetic material. We might
also expect that a soldier would better reflect and scatter electromagnetic signals
like radar due to the metallic content on his person.
• Vehicle: A vehicle is likely to disrupt the environment thermally, seismically,
acoustically, electrically, magnetically, chemically, and optically. Like humans,
vehicles have a thermal signature consisting of “hotspots” like the engine region
54

and a plume of hot exhaust. Both rolling and tracked vehicles have detectable
seismic and acoustic signatures. Tracked vehicles, in particular, have highly
characteristic mechanical signatures due to the rhythmic clicks and oscillations
of the tracks whereas wheeled vehicles tend to exhibit wideband acoustic energy.
Vehicles contain a considerable metallic mass that affects ambient electric and
magnetic fields more strongly and in an area much larger than a soldier. Vehicles
emit chemicals like carbon monoxide and carbon dioxide as a side effect of
combustion. Vehicles also reflect, scatter, and absorb optical, electromagnetic,
acoustic, and ultrasonic signals.
Of course, there is a tension between the richness of a sensor’s output and the
resources required to process the signals it generates. Imaging and radar sensors, for
example, can provide an immense amount of information but the algorithms needed
to extract this information can have high space, time, or message complexity, making
these sensors unsuitable for use on energy-constrained leaf nodes in a sensor network.
We take that view that a collection of simple sensors, each of which requires low
complexity algorithms for processing, can collaborate as an ensemble to provide a
higher detection signal-to-noise ratio and a lower classification error rate than is
otherwise possible on devices of this class. This view lead us to choose acoustic,
magnetic, and passive infrared as the key components of the XSM sensor suite, with
straightforward target detection and discriminability playing an important role in our
decision.
The strengths of acoustic sensors include long sensing range, high-fidelity, no line-
of-sight requirement, and passive nature. Weaknesses include poorly defined target
55

phenomenologies for certain target classes, high sampling rates for estimation, and
high time and space complexity for signal processing.
The strengths of magnetic sensors include well defined far-field target phenomenolo-
gies, discrimination of ferrous objects, no line-of-sight requirement, and passive na-
ture. Weaknesses include poorly defined near-field target phenomenologies, high con-
tinuous current draw, and limited sensing range.
The strengths of passive infrared sensors include excellent sensitivity, excellent
selectivity, low quiesent current, and passive nature. Weaknesses include line-of-sight
requirement and reduced sensitivity when ambient temperatures are the same as that
of the target.
By fusing simultaneous detections from these sensors, we can discriminate our
target classes using the following classification predicates:
civilian = pir ∧ ¬mag (3.3)
soldier = pir ∧mag (3.4)
vehicle = pir ∧mag ∧mic (3.5)
where pir refers to a passive infrared detection, mag refers to presence of a ferromag-
netic object near a sensor, and mic refers to either wideband acoustic energy or the
presence of harmonics in the acoustic spectra.
3.4.1 Acoustic
The JLI Electronics F6027AP microphone is at the heart of the acoustic subsys-
tem. This sensor is an omnidirectional back electret condenser microphone cartridge.
The microphone sensitivity is −46 ± 2dB (0dB is 1V/Pa at 1kHz), the frequency
56
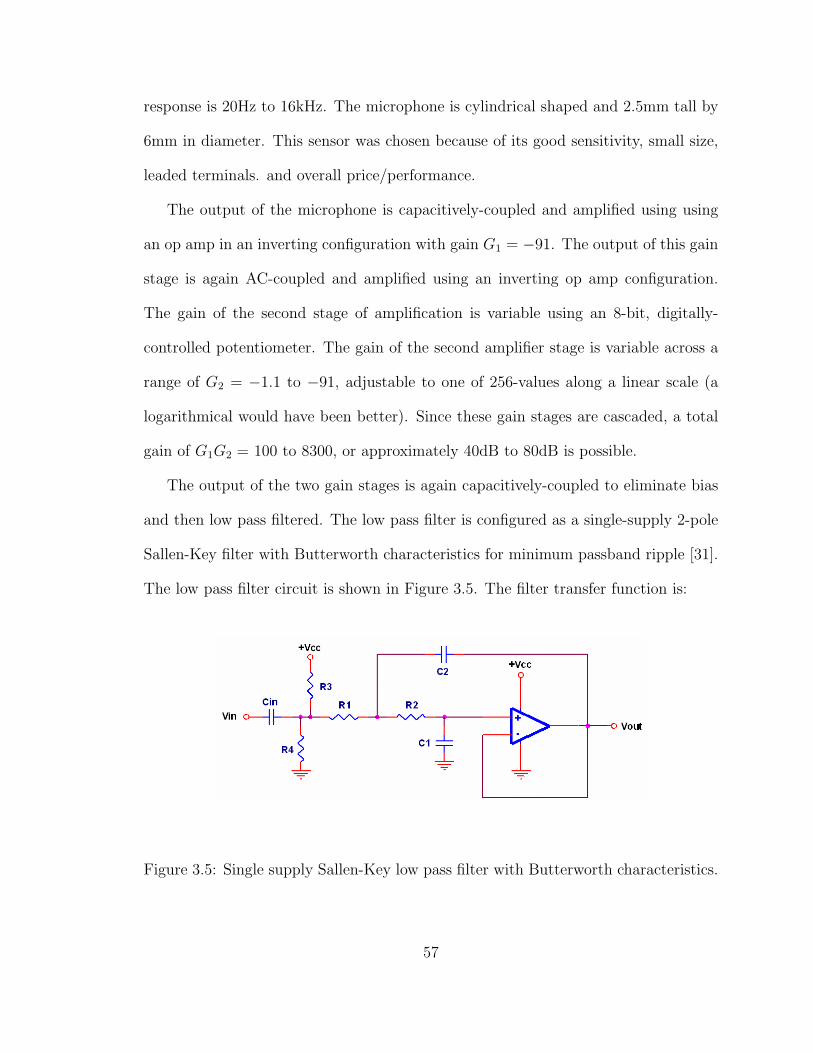
response is 20Hz to 16kHz. The microphone is cylindrical shaped and 2.5mm tall by
6mm in diameter. This sensor was chosen because of its good sensitivity, small size,
leaded terminals. and overall price/performance.
The output of the microphone is capacitively-coupled and amplified using using
an op amp in an inverting configuration with gain G1 = −91. The output of this gain
stage is again AC-coupled and amplified using an inverting op amp configuration.
The gain of the second stage of amplification is variable using an 8-bit, digitally-
controlled potentiometer. The gain of the second amplifier stage is variable across a
range of G2 = −1.1 to −91, adjustable to one of 256-values along a linear scale (a
logarithmical would have been better). Since these gain stages are cascaded, a total
gain of G1G2 = 100 to 8300, or approximately 40dB to 80dB is possible.
The output of the two gain stages is again capacitively-coupled to eliminate bias
and then low pass filtered. The low pass filter is configured as a single-supply 2-pole
Sallen-Key filter with Butterworth characteristics for minimum passband ripple [31].
The low pass filter circuit is shown in Figure 3.5. The filter transfer function is:
Figure 3.5: Single supply Sallen-Key low pass filter with Butterworth characteristics.
57

H(s) =Vo
Vi
=k
As2 + Bs + 1(3.6)
where k = 1 since we use a unity gain op amp configuration, A = R1R2C1C2 and
B = R1C1 + R2C1 + R1C2(1− k). The filter’s cutoff frequency is:
fc =1
2π√
R1R2C1C2
(3.7)
In our implementation R1 and R2 are each composed of a fixed resistor (1.1kΩ)
in series with a digitally-controlled potentiometer (0 to 100kΩ). The values of R1
and R2 should be set equal for Butterworth characteristics. In our implementation,
C1 = 0.01µF is and C2 = 0.022µF. The ratio of C2/C1 = 2 is used for Butterworth
filter characteristics. The range of cutoff frequencies possible vary from approximately
100Hz when R1 = R2 = 101.1kΩ to 10kHz when R1 = R2 = 1.1kΩ. Resistors R3 and
R4 are 100kΩ resistors which set the signal bias to VCC/2. This biasing is necessary
since the circuit operates from a single supply.
The output of the low pass filter is again capacitively-coupled to eliminate bias
and then high pass filtered. Like the low pass filter, the high pass filter is configured
in a 2-pole Sallen-Key configuration with Butterworth characteristics. The high pass
filter circuit is shown in Figure 3.6. The filter transfer function is:
H(s) =Vo
Vi
=s2kA
As2 + Cs + 1(3.8)
where C = R2C2 + R2C1 + R1C2(1 − k). The coefficients A and k are the same
as in the low pass filter case, and the cutoff frequency is computed in an identical
manner as well. The roles of the resistors and capacitors are reversed in the high pass
filter case so the values of C1 and C2 should be set equal and the ratio R1/R2 = 2
provides Butterworth characteristics. In our implementation R1 and R2 are each
58

Figure 3.6: Single supply Sallen-Key high pass filter with Butterworth characteristics.
composed of a fixed resistor (470Ω and 240Ω, respectively) in series with a digitally-
controlled potentiometer (0 to 100kΩ). The range of cutoff frequencies possible vary
from approximately 20Hz when R1 = 100.47kΩ and R2 = 50.24kΩ to 4.7kHz when
R1 = 470Ω and R2 = 240Ω. Although not shown, the signal bias is set to VCC/2 using
a similar approach as in the low pass filter case. The cascaded filter pair implements
a tunable bandpass filter with independently adjustable cutoffs. Figure 3.7 shows
the frequency response of the low pass filter, high pass filter, and the pair cascaded
together to realize a bandpass filter.
The output of the high pass filter is connected to an ADC channel as well as the
negative input of a comparator. The positive input of the comparator is connected
to the wiper terminal of a digital potentiometer configured as a voltage divider. The
output of the comparator is connected to an interrupt line on the processor. This
circuit allows us to set a detection threshold which, when exceeded, interrupts the
processor, eliminating the need for continuous sampling and signal processing. It it
this wakeup circuit that supports energy-efficient passive vigilance.
59

3.4.2 Magnetic
The Honeywell HMC1052 magnetoresistive sensor is at the core of the magnetic
sensing subsystem. This sensor was chosen because of its two-axis orthogonal sens-
ing, small size, low-voltage operation, low-power consumption, high bandwidth, low
latency, and miniature surface mount package [32]. Internally, the magnetometer is
configured as a Wheatstone bridge whose output is differentially amplified by an in-
strumentation amplifier with a gain G1 = 247. The output of this instrumentation
amplifier is low pass filtered using an RC-circuit with cutoff frequency fc = 19Hz.
The output of the low pass filter is fed into the non-inverting input of a second in-
strumentation amplifier with gain G2 = 78, for a combined gain approaching 20,000
or 86dB. The inverting input of the second instrumentation amplifier is connected to
the wiper terminal of a digital potentiometer configured as a voltage divider. The
instrumentation amplifier’s inverting input is the only user-adjustable parameter in
the magnetometer subsystem and varying it adjusts the bias point of the amplifier.
3.4.3 Passive Infrared
The Kube Electronics C172 pyroelectric sensor is at the core of the passive infrared
subsystem. This sensor consists of two physically separated pyroelectric sensing el-
ements and a JFET amplifier sealed into a standard hermetic metal TO-5 housing
with an integrated optical filter. The sensor is fitted with a compact “cone optics
reflector” that obviates the need for additional lenses. Passive infrared (PIR) sensors
are very popular for detecting human and vehicle presence. These devices are the
central component in many motion sensors for automatic lighting, security systems,
and electric doors. PIR sensors are a good choice for presence and motion detection
60
owing to their low power, small size, high sensitivity, low cost, and broad availability.
The sensors themselves draw just a few µWatts of power and sensing circuits can be
designed with multi-year lifetimes.
The passive infrared subsystem is composed of several blocks including power
control, power supply filtering, quad sensors, active band pass filters, a summing op
amp, and a window comparator. Each PIR sensor has a 100 field-of-view. The four
PIR sensors are mounted on 90 intervals so their fields-of-view overlap slightly. The
sensing and active filter blocks operate in parallel, to a degree, until they are combined
into a single analog signal at the summing op amp whose output is connected to
an ADC input channel on the processor. The frequency response of the filtering
electronics is shown in Figure B.2
This analog signal that is fed to the processor’s ADC is also fed to the negative
input of a window comparator. The comparator’s positive input is the only user-
adjustable parameter in the PIR subsystem.
3.4.4 Photo and Temperature
The XSM includes a CdS photocell and a thermistor which share an ADC chan-
nel. The photocell allows the XSM to measure the ambient light level. A historical
profile of light levels can be used to predict the expected number of daylight hours or
discriminate variations in cloud cover from nightfall. The photocell forms the top-half
of a voltage divider and is connected in series with a 10kΩ resistor. Higher light levels
correspond to lower photocell resistances which in turn correspond to higher ADC
values.
61

The thermistor allows the XSM to measure ambient temperature. Such a capabil-
ity has a number of uses. For example, some of the other sensors have temperature
coefficients for parameters like sensitivity and bias point. If the ambient temperature
is known, we can compensate for variations in these parameters. In other cases, a
node may power down in the event that the ambient temperature exceeds the node’s
operating range. Like the photocell, the thermistor forms the top-half of a voltage
divider and is connected in series with the same 10kΩ resistor as the photocell. Care
must be taken to ensure that the operation of the photecell and thermistor is mutu-
ally exclusive. In contrast with the photocell behavior, higher temperatures result in
a higher thermistor resistance, which in turn corresponds to a lower ADC value.
3.4.5 Acceleration
The XSM includes pads and traces for an Analog Devices ADXL202AE accelerom-
eter, and supporting electronics, as shown in Figure 3.9. The ADXL202AE is a small,
low-cost, solid-state, ±2g, dual-axis sensor. We were unable to include this sensor in
the production units due to cost considerations. However, the pads were provided to
gain an additional degree of freedom for our own research and also in the hopes that
future researchers might be able to use this platform to measure acceleration with
some very minor after market modifications.
3.5 Power
The estimated power consumption of the various XSM subsystem is shown in
Table 3.1. The key point to note is that the acoustic and PIR subsystems together
draw 650µA, or approximately 2mW, during continuous operation. This falls within
our acceptable average power budget of 6mW. We note that none of the remaining
62

Subsystem State Current (at 3V) Units
Acoustic off 1 µAAcoustic on 350 µA
Magnetometer off 1 µAMagnetometer on 3 mA
PIR off 1 µAPIR on 300 µA
Sounder off 1 µASounder on 16 mARadio off 1 µARadio receive 8 mARadio transmit 16 mA
Processor sleep 10 µAProcessor active 8 mA
Table 3.1: Estimated current draw of XSM subsystems.
subsystems can be powered continuously without exceeding our power budget. Con-
sequently, we are forced to use a low-power listen mode of communications or perhaps
something more radical like the acoustic sensing channel as a wakeup “radio” since
the XSM includes a sounder capable of producing 98dB of output in the 4kHz to
5kHz frequency range.3 It is also possible that scheduled communications might suf-
fice but it is not obvious that the system latency requirements can be met with such
an approach.
3.6 Packaging
Sensor nodes for intrusion detection may experience diverse and hostile environ-
ments with wind, rain, snow, flood, heat, cold, terrain, and canopy. The sensor
3The wisdom of using such high probability of detect channel in an application for intrusiondetection notwithstanding.
63
packaging is responsible for protecting the delicate electronics from these elements.
In addition, the packaging can affect the sensing and communications processes ei-
ther positively or negatively. Figure 3.10 shows the XSM enclosure and how the
electronics and batteries are mounted. The XSM enclosure is a commercial-off-the-
shelf plastic product that has been modified to suit our needs. Since the enclosure
plastic is constructed from a material that is opaque to infrared, each side has a
cutout for mounting a PIR-transparent window. Similarly, a number of holes on each
side allow acoustic signals to pass through. A water-resistant windscreen mounted
inside the enclosure sensor reduces wind noise and protects the electronics from light
rain. A telescoping antenna is mounted to the circuit board and protrudes through
the top of the enclosure. A rubber plunger makes the RESET and USER buttons
easily accessible yet unexposed.
3.7 Summary
We have presented the requirements, philosophy, and design of the eXtreme Scale
Mote. This is the first highly-integrated mote-class sensor node that directly supports
recoverability and passive vigilance – two essential features for large-scale and long-
lived operation. Recoverability is achieved through the use of a grenade timer. We are
unaware of any other device which implements a hardware grenade timer explicitly
for the purposes of recoverability. Passive vigilance is achieved using wakeup sensing
circuits. These circuits, through the use of low-power sensing and signal conditioning
electronics, combined with an event-driven sensor interface, allow the processor to
sleep a large fraction of the time, extending the system’s lifetime.
64

Figure 3.7: Bode diagram of cascaded Sallen-Key low pass and high pass filters withboth cutoff frequencies set to 4kHz (25krad/sec). The low pass filter magnitude andphase (blue) at 102 rad/sec is 0dB and 0, respectively, and at 106 rad/sec approaches-60dB and -180. The high pass filter magnitude and phase (green) at 102 rad/sec isapproximately -90dB and 180, respectively, and at 106 rad/sec approaches 0dB and0. The cascaded filter response implements a band pass filter that is the sum of thelow pass and high pass filters. The band pass filter magnitude and phase (red) at 102
rad/sec is approximately -90dB and 180, respectively, and at 106 rad/sec approaches-60dB and -180.
65

Date/Time run: 07/03/04 02:31:03PIR Signal Conditioning Circuit Frequency Response
Temperature: 27.0
Date: July 03, 2004 Page 1 Time: 02:31:13
(A) pir_bpf_bode.dat (active)
Frequency
1.0mHz 10mHz 100mHz 1.0Hz 10Hz 100Hz 1.0KHz 10KHzP(V(7))
-400d
-200d
0ddB(V(7)/V(1))
-40
0
40
80
SEL>>
Figure 3.8: Frequency response of PIR signal conditioning circuit for XSM.
5
5
4
4
3
3
2
2
1
1
D D
C C
B B
A A
ADC1ADC[0..7]
PW4
ADC3ADC4
VCC
VCC
VCCVCC
VCC
VCC
VCC
SERIAL_ID
WR
RSTN
RD
PW0
THERM_PWR
I2C_CLK
I2C_DATA
I2C_DATA0
I2C_DATA1
I2C_CLK1
I2C_CLK0
PW [0..7]
ADC[0..7]
Title
Size Document Number R ev
Date: Sheet o f
EXCEPT AS MAY BE OTHERWISE PROVIDED BY CONTRACT, THISDRAWING OR SPECIFICATION IS THE PROPRIETARY PROPERTY OFCROSSBOW TECHNOLOGY INC. IT IS ISSUED IN STRICT CONFIDENCEAND SHALL NOT BE REPRODUCED OR COPIED OR USED (PARTIALLYOR WHOLLY) IN ANY MANNER WITHOUT PRIOR EXPRESS WRITTENAUTHORIZATION OF CROSSBOW TECHNOLOGY INC.
DATEDWN
CHK
APRVD
APRVD 6310-0336-02 A
XSM100CA XTREME SCALE MOTE
Crossbow Technology41 Daggett Drive San Jose, CA. 95134
B2 8W ednesday, June 30, 2004
X
XX/XX/XX
5-14-04
XX/XX/XX
P. DUTTA
X
M. GRIMMER 5-14-04
POWER/GRENADE TIMER/LEDS
remove switch
OHIO STATE UNIVERSITY AND CROSSBOW
U30
DS2417
DIO2
X2 6
INT 3VCC4
X15
C761000pF
R113
330K
C17.1uF
SW1
SPDT
12
3
R76100K1%
R103
0 OHM
U8
ADXL202AE
ST1
T22
GND3
YOUT 4XOUT 5
YFILT 6XFILT 7
VCC8
R112
100
1
0
U33
NC7SB3157
3
1
65
4
RT1
10K
C16.1uF C60
.1uF
R110
4.7KC18.1uF
R108
4.7K
Y4
32.768KHZ
21
34
R66
10.0K
R211K
R70
0 OHM
R111
4.7K
J6
HDR 2 X 1 X .1
1 1
2 2
R64
PHOTO
R109
4.7K
U20
TC7WH74
D2
CK1Q 5
/Q 3
VCC 8PR7
CL6
R69
10.0K
C19.1uF
R5710.0K
C15.1uF
R634.7K
R107
4.7K
U39
74ACH1G08
1
24
5
R200 OHM
R22
4.7K
Figure 3.9: Accelerometer circuit available on the XSM (unpopulated).
66

Figure 3.10: This model shows how the XSM electronics and batteries are mountedin the enclosure. Source: Crossbow Technology.
67

CHAPTER 4
DETECTION AND CLASSIFICATION OFFERROMAGNETIC TARGETS
Most targets of military interest contain ferromagnetic materials which perturb
the ambient magnetic field surrounding the object. Soldiers carry guns, bullets, and
grenades. Vehicles have considerable ferrous content in the wheels, engines, and un-
dercarriage. These targets exhibit characteristic signatures. By detecting changes in
the ambient magnetic field, it is possible to detect the presence of these and other
target classes. In addition, by extracting parameters of the space-time varying mag-
netic fields surrounding these targets, we can can discriminate between certain tar-
get subclasses. In this work, we consider detection and classification techniques for
discriminating soldiers from vehicles using the space-time signatures of these target
classes. We also demonstrate techniques for energy-efficient use of sensors.
Deeply embedded and densely distributed networked systems that can sense and
control the environment, perform local computations, and communicate the results
will allow us to interact with the physical world on space and time scales previously
imagined only in science fiction. This enabling nature of sensor actuator networks has
contributed to a groundswell of research on both the system issues encountered when
building such networks and on the fielding of new classes of applications [33, 34, 12].
68
Perhaps equally important is that the enabling nature of sensor networks provides
novel approaches to existing problems, as we illustrate in this work in the context of
a well-known surveillance problem.
4.1 Related Work
Detection and classification of targets is a basic surveillance or military applica-
tion, and has hence received a considerable amount of attention in the literature.
Recent developments in the miniaturization of sensing, computing, and communica-
tions technology have made it possible to use a plurality of sensors within a single
device or sensor network node. Their low cost makes it feasible to deploy them in
significant numbers across large areas and consequently, these devices have become a
promising candidate for addressing the distributed detection and classification prob-
lems. A variety of approaches have been proposed that range over a rich design space
from purely centralized to purely distributed, high message complexity to high com-
putational complexity, data fusion-based to decision fusion-based, etc. The spatial
density and redundancy that is possible due to the diminishing cost of a single node
favors highly distributed models. The constraints of network reliability and load per-
mit sending only a limited amount of data over the network, and in some extreme
cases, even a single bit of data. Such binary networks have been used in previous
work for tracking [35, 36, 37]. Even classification schemes based on low dimensional
decision fusion [38] require significant local signal processing.
In contrast to our work, much of the work on target classification in sensor net-
works has used a centralized approach. This typically involves pattern recognition
or matching using time-frequency signatures produced by different types of targets.
69

Caruso, et. al. [39] describe a purely centralized vehicle classification system using
magnetometers based on matching magnetic signatures produced by different types of
vehicles. However, this and other such approaches require significant a priori config-
uration and control over the environment. In [39], for instance, the vehicle has to be
driven directly over the sensor for accurate classification and at random orientations
and distances, the system can only detect presence. Such an approach also imposes
high computational burden on individual nodes. Meesookho, et. al. [40], describe
a collaborative classification scheme based on exchanging local feature vectors. The
accuracy of this scheme, however, improves only as the number of collaborating sen-
sors increases, which imposes a high load on the network. By way of contrast, Duarte
et. al. [38] describes a classifier in which each sensor extracts feature vectors based
on its own readings and passes them through a local pattern classifier. The sensor
then transmits only the decision of the local classifier and an associated probability of
accuracy to a central node that fuses all such received decisions. This scheme, while
promising since it only slightly loads the network, requires significant computational
resources at each node.
4.2 Target Model
In this section, we present our model of both soldiers and vehicles as a magnetic
dipoles. A moving soldier or vehicle, or more generally, a moving ferromagnetic object
can be modeled as a moving magnetic dipole centered at (x, y, z). Still more generally,
the dipole position can be described as a function of time if x, y, and z are replaced
with x(t), y(t), and z(t), respectively.
70

The dipole is modeled as two equal but opposite equivalent magnetic charges +q
and −q, separated by a distance l = 2r, where r is the radial distance from the dipole
center to a charge. The orientation of the dipole is given in spherical coordinates
relative to the dipole center. The zenith (polar) angle φ and the azimuthal angle
θ, together with r, fully specify the position and orientation of the magnetic dipole,
as illustrated in Figure 4.1. As before, a more general description of the dipole’s
orientation as a function of time can be given by replacing the angles φ and θ with
time dependent versions φ(t) and θ(t) or position dependent versions φ(x, y, z) and
θ(x, y, z).
A non-uniform ferromagnetic object like a vehicle will have a more complex mag-
netic signature composed of dipoles of varying strengths and moment arm lengths
representing the engine block, axles, spare tires, roof, and other parts. These finer-
granularity components can be modeled in an additive manner due to superposition
effects. However, for a first order analysis sufficient for vehicle detection, a single
dipole provides an adequate estimate of the magnetic flux density B at the origin
B =µ
4πq
(r1
r31
− r2
r32
)(4.1)
where
r1 = (x + r sin θ cos φ)x + (y + r sin θ sin φ)y + (z + r cos θ)z (4.2)
and
r2 = (x− r sin θ cos φ)x + (y − r sin θ sin φ)y + (z − r cos θ)z (4.3)
The magnetic flux density B is composed of the following components:
B = Bxx + Byy + Bzz (4.4)
71

r
x
z
y
x
z
y
r
r 1
r 2
Figure 4.1: Magnetic dipole model.
where Bx, By, and Bz are the rectangular components given by:
Bx =µ
4πq
[x
(1
r31
− 1
r32
)+ r sin θ cos φ
(1
r31
+1
r32
)](4.5)
By =µ
4πq
[y
(1
r31
− 1
r32
)+ r sin θ cos φ
(1
r31
+1
r32
)](4.6)
Bz =µ
4πq
[z
(1
r31
− 1
r32
)+ r cos θ
(1
r31
+1
r32
)](4.7)
and where r1 and r2 are the magnitudes of r1 and r2, respectively:
r1 =√
(x + r sin θ cos φ)2 + (y + r sin θ sin φ)2 + (z + r cos θ)2 (4.8)
72

and
r2 =√
(x− r sin θ cos φ)2 + (y − r sin θ sin φ)2 + (z − r cos θ)2 (4.9)
4.3 Sensor Platform
Our sensor platform consists of the Mica2 processor/radio board and the Mica
Sensor Board, both available from Crossbow Technology.
4.3.1 Mica2 Processor and Radio Board
The familiar Mica2 mote, a derivative of the Mica family of motes developed at
U.C. Berkeley [41], served as our network node. The Mica2 offers an Atmel AT-
mega128L processor with 4KB of RAM, 128KB of FLASH program memory, and
512KB of EEPROM memory for logging. The motes run the TinyOS operating sys-
tem [42], and are programmed using the NesC language [43].
4.3.2 Mica Sensor Board
Our sensor node includes the popular Mica Sensor Board. This board includes
a 2-axis magnetometer, 2-axis accelerometer, microphone, thermistor, photosensor,
and sounder. For this work, we only used the magnetometer subsystem on the Mica
Sensor Board. The core of this circuit is the Honeywell HMC1002 dual 4-element
magnetoresistive wheatstone bridge. The HMC1002 can detect magnetic fields as low
as 30 µgauss and up to ±6 gauss (earth’s magnetic field is 0.5 gauss). The nomi-
nal sensitivity of the magnetometer is 1.0mV/V/gauss, which means the differential
output fluctuates 1.0mV per volt of supply voltage per gauss of magnetic field.
Some historical context might also be useful. The first use of magnetometers on
the Mote platform can be traced back to COTS Dust in 2000 [44]. While a design
73

for a magnetic field sensor, based on the NVE AA002-02 magnetic field sensor, is
presented, no fundamental motivating application is apparent.
Shortly thereafter, in March 2001, researchers demonstrated a fixed/mobile ex-
periment for tracking vehicles with a UAV-delivered sensor network at Twentynine
Palms [45]. While the sensorboard used in that experiment, called the “Magnetome-
ter Board,” never became available commercially, its design, based on the Honeywell
HMC1002 magnetometer [32], did become available [46] and served as the basis for
several future magnetometer designs.
The Mica Sensor Board owes part of it heritage to the Twentynine Palms sen-
sorboard and is in broad use across the sensor networking research community. Our
motivation for using the Micasb was to leverage a standard sensorboard platform. The
Honeywell magnetometer experiences both drift and a decrease in sensitivity when
exposed to temperature swings or strong magnetic fields. The Honeywell sensor in-
cludes a set/reset input to reduce this drift and resensitize the magnetometer using a
high current pulse. Unfortunately, the Mica Sensor Board lacks of any circuitry that
implements this set/reset feature.
4.4 Towards Low-power Sensing
A major concern with the magnetometer circuit present on the Mica Sensor Board
is its power consumption of nearly 20mW during continuous operation. Approxi-
mately 90% of the power is consumed by the sensor itself and the remaining power is
consumed by the signal conditioning electronics.4 One popular approach to lowering
4We note that the Mica Sensor Board design uses a pair of instrumentation amplifiers for eachmagnetometer channel. These amplifiers draw 175µA each and could be replaced with low-poweroperational amplifiers that draw less than 25µA each.
74

the power consumption of sensor circuits is to duty-cycle the sensor and supporting
electronics. The magnetometer is a predominantly resistive element with a bandwidth
of 5MHz and nanosecond-scale latencies, so it is well suited to duty-cycled operation.
However, the signal conditioning circuit is not suited to duty-cycled operation because
of the phase delay of a low pass filter used for anti-aliasing and 60Hz noise reduction
[47].
An analog low pass filter needs a continuous-time input so just duty-cycling the
magnetometer would result in a chain of low pass filter step responses as the power
to the sensor is toggled on and off. To compensate, we might turn on the sensor,
wait the settling time, and then take a sample. Since this filter has a time constant
τ = RC = 20kΩ×1µF=20ms, the settling time of the filter to a step response is about
5τ or 100ms, so duty-cycling will help reduce power consumption only at sampling
rates lower than 10Hz. Eliminating the filter altogether will cause aliasing and is
generally considered poor design for ADC circuits.
To address the problem of a low startup-latency, high-power sensor coupled with
a high-latency, low-power signal conditioning circuit, we propose the use of a mixed-
signal, multi-phase clocked, sample-and-hold control circuit as the interface between
the sensor and signal conditioning electronics. This approach is not limited to the
magnetometer and can be used for any sensor that satifies the low startup-latency
requirement. Our sample-and-hold control circuit is shown in Figure 4.2.
This circuit works as follows. Whenever VCC is applied to the SHC POWER
line, schmitt triggers U1 through U4 are turned on. Schmitt triggers U1 and U2 are
part of an oscillator circuit whose duty cycle and frequency is set using capacitor C1
and resistors R2 and R3. For a small (unbalanced) duty cycle, DC, in which the
75

5
5
4
4
3
3
2
2
1
1
D D
C C
B B
A A
ADC6
MAG_PWR
MAG_PWR
MAG_VREF
MAG_HOLD
MAG_PWR
MAG_VREF
MAG_PWR
I2C_CLK
MAG_PWR
MAG_PWR
ADC5
MAG_HOLD
MAG_PWR
I2C_DATA
MAG_PWR
MAG_PWR
MAG_VREF
PW5
HOLD
MAG_SENSOR_PWR
SENSOR_PWR
SHC_PWR
VCC
VCC
I2C_DATA1
MAG_SR
I2C_CLK1
PW[0..7]
ADC[0..7]
Title
Size Document Number R ev
Date: Sheet o f
EXCEPT AS MAY BE OTHERWISE PROVIDED BY CONTRACT, THISDRAWING OR SPECIFICATION IS THE PROPRIETARY PROPERTY OFCROSSBOW TECHNOLOGY INC. IT IS ISSUED IN STRICT CONFIDENCEAND SHALL NOT BE REPRODUCED OR COPIED OR USED (PARTIALLYOR WHOLLY) IN ANY MANNER WITHOUT PRIOR EXPRESS WRITTENAUTHORIZATION OF CROSSBOW TECHNOLOGY INC.
DATEDWN
CHK
APRVD
APRVD 6310-0336-02 A
XSM100CA XTREME SCALE MOTE
Crossbow Technology41 Daggett Drive San Jose, CA. 95134
B7 8Fr iday, A ugust 13, 2004
X
XX/XX/XX
5-14-04
XX/XX/XX
P. DUTTA
X
M. GRIMMER 5-14-04
OHIO STATE UNIVERSITY AND CROSSBOW
MAGNETOMETER SENSOR
ADDR[00]
R51
330
C581.0uF
U15
HMC1052
GNDB1
OUTB+2 GNDA1 3
OUTA+ 4
VB
R5
SR+6
OUTB-7
SR-8
GNDA2 9
OUTA- 10
V+
V-
+
-
U?LMC7215
5
31
2
4
U17A
AD5242
A1 2
W1 3
B1 4
SD6SCL7SDA8
AD09
AD110
O1 1
C561.0uF
C?0.1uF
U?
MAX4597
IN1
COM2
GND
3
NC 4
VCC
5
C551.0uF
U68F
74HC14A/SO
13 12
C?0.1uF
U3
5 6
C2
R55
25.5K
R7
C521.0uF
R2
R43
100K
C53
0.1uF25V
D1
GAIN
SNSVREF
U13B
INA2126
15
16
13 14
1110
12
U?
MAX4597
IN1
COM2
GND
3
NC 4
VCC
5
U1
1 2
14
7
U16
TLE2426
OUT 1
GND2IN3
NC4
NC5 NC 6NC 7NR 8
GAIN
V+
V-
SNSVREF
U18A
INA2126
2
1
4 3
98
67
5
R52
1.10K
R49
25.5K
U14
IRF7507
SN1GN2SP3GP4 DP 5
DP 6
DN 7
DN 8
R44
8.25K
U4
9 8
R6
R3
U17B
AD5242
A2 16
W2 15
B2 14
O2 13VSS12
VCC5
GND11
R41
200
V+
V-
+
-
U?LMC7215
5
31
2
4
R47
25.5K
R53
25.5K
C571.0uF
C1
C541.0uF
R50
8.25K
R5
Q3
ZXM61P03F
1
32
U68E
74HC14A/SO
11 10
U2
3 4
GAIN
V+
V-
SNSVREF
U13A
INA2126
2
1
4 3
98
67
5
C6510uF
R45
330
GAIN
SNSVREF
U18B
INA2126
15
16
13 14
1110
12
C3
R42
10.0K
R46
1.10K
Figure 4.2: Sample-and-hold control circuit.
Ton/(Ton + Toff ) << 1, R2 is chosen to be much smaller than R3 so that when D1
is forward-biased, R2 and R3 are both in C1’s path but when D1 is reverse-biased,
only R3 is in C1’s path. The output of the oscillator is used to enable (power on)
and disable (power off) the sensor. The SENSOR PWR signal powers on the sensor
during the Ton time and turns off the sensor during the Toff time. The sensor transient
time, Tt, is the amount of time required for the sensor output to stabilize (also known
as the sensor’s startup latency).
This SENSOR PWR signal is also connected to a positive edge detector formed
from capacitor C2, resistor R5, and schmitt trigger U3. Assume C2 is in a discharged
state and SENSOR PWR is low. Then, U3’s input will be low and output will be
76

high. If SENSOR PWR transitions from low to high, as would occur when the oscil-
lator output changes from Toff to Ton, this low-to-high transition passes through the
capacitor and causes the output of U3 to go low. C2 begins to charge through R5,
which causes the voltage across R5 to decrease until C2 is fully charged. When the
voltage across R5 reaches VIL, the low-level input of U3, the output of U3 transitions
from a low state to a high state. The purpose of this edge detector is create a delay
after the SENSOR PWR low to high edge. This length of this delay must exceed the
startup latency of the sensor.
The output of the first positive edge detector is connected to a second positive
edge detector formed from capacitor C3, resistor R6, and schmitt trigger U4. The
output of this second edge detector is normally high but it generates a negative pulse
(high to low to high) when the detector detects a positive edge on its input. The
output pulse of the edge detector provides the HOLD signal and is connected to the
control line of an analog switch (not shown). When the HOLD signal is low, the hold
capacitor tracks (samples) the output voltage of the sensor. When the HOLD signal
is high, the hold capacitor is disconnected from the sensor and holds the last tracked
output value of the sensor.
The width of the edge detector’s output pulse is chosen to exceed the turn on
time of the analog switch that connects the sensor to hold capacitor and the charging
time of the hold capacitor (not shown). Note that the second of the edge detectors
is triggered on the rising edge of the preceding positive edge detector output. Recall
that at the time of the positive edge detector’s rising edge, the output of the sensor
has stabilized so the sampling period occurs during a stable sensor signal. Note that
77

the oscillator’s on time Ton must exceed the sum of the width of the pulses that are
generated from the two edge detectors.
The time constant, τ = RC, of a positive edge detector determines the width
of the high to low to high pulse that is generated when the edge detector’s input
transitions from low to high. When the capacitor, C, is charging after a low to high
transition on the input, the voltage across the resistor, R is:
V (t) = VCC(1− e−t/τ ) (4.10)
Substituting VIL for V (t) and rearranging to solve for t, we have:
t = −τ ln(1− VIL
VCC
)(4.11)
The output of the hold capacitor, buffered with an op amp, is connected to the
remaining signal conditioning electronics just like the sensor would be in the absence
of the sample-and-hold control circuit.
The current consumption of the sample-and-hold control is less than 50µA and
the current consumption of the additional op amps is similar, for an increase of nearly
100µA. This increase is overshadowed by the significant decrease in average current
consumption owing to the duty-cycling of the sensor itself. With low latency sensors,
duty cycles of 1% or less are easily achievable.
4.5 Detection
The component graph of the detection signal chain for ferromagnetic targets is
shown in Figure 4.3. The modules of this signal chain include a limiter, low pass
filter (noise filtering), decimator, moving statistics, constant false alarm rate (CFAR)
78

Figure 4.3: Magnetometer signal detection chain.
detector, low pass filter (hysteresis), and energy estimator. The outputs of the de-
tector include signal duration and signal energy content. Addition modules could
include a peak estimator or a hidden markov model for finer-grained signature anal-
ysis supporting classification. This signal chain operates independently on each of
the two magnetometer axes and fuses the readings together at each node. Such local
fusing reduces false alarms caused by spurious noise along only one axis. The design
philosophy of the signal detection subsystem is that all operations occur in response
to events – that is, the arrival of new data samples or timer events drives signal
processing. Sampling occurs with a certain predetermined frequency, fs, which is a
function of Vmax and the noise power spectral density. In the future, we envision an
adaptive sampler that adjusts to varying noise power and frequency.
A detailed description of the signal chain modules include:
79

• Limiter: The limiter is a non-linear module that acts to limit the samples that
are large in magnitude in an effort by the detector to reduce the effect of noise
outliers. Without the limiter, the PD could be reduced substantially.
• Low Pass Filter: The FIR low pass filter computes a moving average of the
signal to reduce noise and improve the PFA.
• Decimator: The decimator allows downsampling to rates more appropriate for
our signal phenomenology.
• Moving Statistics: The moving statistics module estimates the signal mean
and variance over the previous n data samples every time a new sample becomes
available.
• CFAR Detector: The output of the CFAR detector is true during the interval
in which a target passes by the sensor and false otherwise. This module esti-
mates the signal duration. The module implements a Neyman-Pearson detector
that works by building a histogram, which serves as a proxy for the probability
density function, of the signal variance in the noise over a long period of time
and then compares it to the (nearly) instantaneous signal variance as reported
by the moving statistics.
• Hysteresis: The hysteresis is implemented using an IIR low pass filter over
the signal variance. The IIR filter provides a “fast-attack, slow-decay” response
(i.e. a non-constant phase shift). Such a response was desired in order to
avoid breaking up a single detection event into multiple smaller detections.
80

The downside, however, is that stronger signals cause longer decay times and
biases the duration estimation non-linearly before it is reported.
• Energy Estimator: The energy estimator module determines the energy con-
tent of the signal of interest. The estimator begins computing the energy con-
tent of the signal when the output of the signal detector is true and stops when
the output of the signal detector is false. The interval over which the energy
content is computed is the duration of the signal. The energy is computed by
subtracting the moving average, or bias, from the signal and then summing the
squares of the samples over the period of the signal. An event is signaled upon
completion of the energy content computation.
• Classifier: The classifier fuses the various parameters (duration, energy, etc.)
and, optionally, can attempt to categorize the target into one of several classes.
4.6 Classification
The goal of ferromagnetic classification is to correctly label a target as belonging
to one of several classes including soldier and vehicle. Vehicles contain significantly
greater amounts of metallic mass than soldiers and consequently vehicles magnetically
affect much larger areas than soldiers do. In general, each ferromagnetic target class
has a minimum and maximum area in which it disrupts earth’s ambient magnetic
field in a manner that is detectable by our sensors. In this section, we formalize the
notion of this area, called the target’s “influence field,” develop an estimator for it,
and analyze the estimator’s performance for varying degrees of network reliability
and latency.
81

4.6.1 The Influence Field as a Spatial Statistic
The influence field is the size of the area in which a target can be detected. In
practice, the influence field is the union of the areas bounded by the curves of equipo-
tential field strength where the signal-to-noise ratio exceeds the sensor’s minimum
detectable threshold. Since the size and shape of this area changes as a function of
sensor calibration and sensitivity, noise power, and other nuisance parameters like
target orientation, the area is bounded by a maximum and minimum value and is
best treated as a random variable We will show that a Gaussian approximation is a
suitable model for the random variable. The influence fields of different target classes
are usually different, both in relative and absolute terms, from one sensing mode to
the next. A vehicle may have a 5× larger magnetic influence field than a person but
a 50× larger acoustic influence field than the same person.
The following example will serve to further illustrate this concept. Assume that
nodes are deployed with a density of λ and that the nominal area of the influence field
is A. Then, the number of sensors, n, that can simultaneously detect the object is
given by n = Aλ, or more generally by the range [Aminλ, Amaxλ]. If target classes do
not have overlapping influence field ranges, then the system can discriminate between
target classes by examining the value of n. For example, assume a regular grid on
5-foot centers giving a deployment density of λ = 1/52 = 0.04 sensors/sqft, and a
target with a minimum and maximum influence radius of 12 ft and 15 ft, respectively.
Then, Amin = π122 = 452 sqft and Amax = π152 = 707 sqft. We find that between
nmin = Aminλ = 0.04 × 452 = 18 and nmax = Amaxλ = 0.04 × 707 = 28 sensors will
detect the target’s presence at a single point in time. Given the same deployment
density, assume a second target with a minimum and maximum influence radius of 5
82

ft and 8 ft, respectively. Then, Amin = π52 = 79 sqft and Amax = π82 = 201 sqft. We
find that between nmin = Aminλ = 0.04×79 = 3 and nmax = Amaxλ = 0.04×201 = 8
sensors will detect the second target’s presence at a single point in time.
For practical reasons, we associate with the influence field a window of time in
which the target is detected. There are several factors that influence the choice of the
size of this window. The number of nodes that can detect a moving target in a given
interval of time may depend upon the size of the object, the amount of ferromagnetic
content and hence the range at which it can be detected by a magnetometer, the
velocity of the target, and the number of sensors in the region around the target.
Therefore, we must consider the density of node deployment and the size and speed
of the target types.
Based on target motion models for our target classes, we identify the smallest
and the slowest moving ones as well as the largest and fastest moving ones. The
amount of time required to process the data for a given window must be less than
the window duration in order to meet the needs of a real-time online system. We are
also concerned with the concurrent detection of the same event at different sensors
because of differences in the hardware, the sensitivity of sensors, or the parameters
of the detection algorithm running at the sensor node. For instance, a fast-attack,
slow-decay detector, like the one used in our signal detection software, can affect sen-
sors in a non-linear and non-deterministic manner, causing perceived time differences
between the starts and ends of detections at different nodes for the same event. This
uncertainty in detection duration, which can be as large as 500ms, also affects the size
of the influence field window. Finally, we also have to factor in the effect of network
unreliability on the number of messages corresponding to the detection events that
83

are actually received at the classifier. Based on these factors, we selected 500ms as the
width of the influence field window. In an ideal case, we would we have sensors with
constant phase delay, a window size of zero, and deterministic network performance.
Given classification’s required window size, we must verify that detection events
occurring at the same physical time are timestamped accordingly with values that
be converted to the same relative timebase at the classifier. In order to achieve this
common timebase, we propose using ETA, the Elapsed Time on Arrival protocol. This
service also needs to guarantee that the maximum difference in the estimates of any
two nodes in the network does not exceed some fraction of the classifier window size.
For instance, for a window size of 500 ms and a classification accuracy of exceeding
99%, we require that the accuracy of the time synchronization service to be within
1% of 500ms or 5ms.
4.6.2 Influence Field Estimator
In order to estimate the influence field, each node that detects a target transmits
a single bit representing the target’s presence along with the elapsed timestamp of the
presence detection and a monotonically increasing event identifier. Once again, upon
detecting the target’s absence, the node transmits the elapsed timestamp with the
same event identifier (each presence-absence pair shares an event identifier). These
presence and absence messages are convergecast to the classifier service running on
a distinguished node, which in our case is the base station located at the root of the
network. The duration of the target’s presence in a particular node’s field of view
is easily computed by taking the difference in the timestamp values from the pair
messages sharing an event id received from that node.
84
4.6.3 Classifier Design
The classifier collects data received from the network and partitions it into win-
dows of global time. Once the incoming data has been partitioned into windows
based on global time, the classifier counts the number of nodes that have detected
the presence of an target in that window. To conserve the network bandwidth, nodes
simply report the start and the end of a detection event. Hence, the classifier has
to maintain a history of nodes that have started detecting an event but have not yet
stopped detecting it. The classifier carries forward the count of such active nodes
from one window to the next. Further, all detection events in a classification window
need not belong to the same target. For instance, if multiple targets simultaneously
in the network, each target will be detected by the nodes in the region surrounding it.
The classifier distinguishes multiple targets and does not combine these simultaneous
detections into a single larger target.
Wind and other sources of noise can cause nodes to report false detections. The
classifier identifies such outliers that could skew the classification. Consequently,
the classifier uses localization information about the reporting nodes and knowledge
of the target motion and phenomenological models. For example, if the classifier
receives only two detection events and the influence field for the smallest target type,
the soldier, is expected to be between 4 and 9 for the given density considering
50% network reliability, the classifier identifies these nodes as outliers and does not
generate a classification. If, on the other hand, the influence field for a soldier is
9 while that for a car is 36, and if 4 soldiers walk through the network at the same
time such that they are at sufficient distance from one another, the classifier identifies
that the corresponding events belong to different targets and accurately classifies the
85

targets as 4 soldiers rather than a single car. Note that the data association problem is
automatically addressed because of the fine-grained spatial locality of the detections.
The output of the classifier at the end of each classification window is one or more
classification decisions along with the supporting evidence, in the form of a set or sets
of nodes, that are associated with the given target.
Classifier latency is an important tunable parameter that governs the length of
time that the classifier waits between receiving the first detection event and providing
the first classification result. The classifier masks detection events until it has received
a sufficient number of samples to achieve the desired probability of false alarm, PFA.
In addition, the classifier introduces a delay while waiting for enough samples to
report a meaningful classification. Consequently, the classifier latency is only one of
two components that contribute to the overall system latency. The other component
of system latency is the latency between detecting a target at the sensor node and
reporting that detection to the classifier. We investigate the classifier performance as
a function of latency in the next section.
4.6.4 Validation
A theoretical model of a target’s influence field, parameterized with the target’s
size, speed, heading, inclination, location, and ferro-magnetic content can be used to
demonstrate that the probability density functions of the various target classes are
discriminable. However, an accurate model of a target’s influence field may be difficult
to achieve without incorporating many nuisance parameters and even still may require
time consuming finite element methods to compute. Due to the spatial, temporal, and
class-conditional variations of the numerous nuisance parameters, we present a simple
86

lumped parameter model of the computed strength and shape of the influence field for
both a soldier and a vehicle in Figure 4.4. The soldier is modeled as carrying a gun of
length 3 ft at an azimuthal angle of 20. The vehicle is modeled as the superposition
of the influence fields of the engine, front axle, rear axle, transmission, spare tire, and
steering wheel. In both cases, the positive y-axis is pointing toward the northwest and
the field strength displayed is the planar projection of the magnetic field at ground
level across the displayed area. These models should convey a sense of the relative
shape of the influence fields and an intuitive understanding of their discriminability.5
Since we do not know the true weights and variations of the parameters, we will use
empirical methods to validate the model.
Figure 4.4: The shape of the influence field of a soldier and a vehicle.
5Note: the field strength is not scaled the same for both plots. Hence, these plots demonstratethe shape but not the relative size of the influence fields.
87

As with any real system, experimental validation of performance is necessary. In
the case of the influence field as an estimator of the target’s class, this validation
exists at three levels: the theoretical influence field, the influence field as measured
by the sensor nodes, and the influence field as reported to the classfier. Due to
the complexity of the theoretical model, the remainder of this section will focus on
empirical measurements of the influence field at the sensor nodes and its estimate
at the classifer. The key distinction is that the estimated influence field is a noisy
function of the measured influence field, network reliability, latency, probability of
detection and false alarm, detector hysteresis, and nuisance parameters described
earlier. How much “noise” is added and in what quantities as a result of these
additional parameters in reality is not clear. Consequently, we vary a few easily
controllable parameters such as speed, heading, network reliability and latency, and
lump the remaining parameters.
Figure 4.5 shows the influence field probability distributions for a soldier and a
car, as actually measured by the sensors. The measured influence field of a soldier
has a mean, µ, of 12.2 and a variance, σ2, of 0.44 while a car has a mean of 43.5
and a variance of 0.49. We overlay on this figure a pair of curves ∼ N (12.1, 1)
and ∼ N (43.5, 1.5), approximating the influence field of a soldier and a vehicle,
respectively. It should be clear from Figure 4.5, that there exists a clear separation
between the measured influence fields for a soldier and a car. Since the distributions
have nearly identical variances, we can compute the discriminability, d′, as
d′ =|µ2 − µ1|
σ= 67 (4.12)
which indicates a practically infinitesmal probability of mis-classification.
88

0 10 20 30 40 500
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4Measured Influence Field
Number of Detecting Nodes, N
P(ω
i|N)
Soldier (ω1)
Vehicle (ω2)
0 10 20 30 40 500
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4Approximated Influence Field
Number of Detecting Nodes, N
P(ω
i|N)
Soldier (ω1)
Vehicle (ω2)
Figure 4.5: The influence field of a soldier and a car as measured at the sensor nodes,and their Gaussian approximations.
We note that these influence field values are ideal in the sense that they are based
on data obtained directly at the nodes and not necessarily the data that is actually
available to the classifier. In order to evaluate system performance, we study the
effects of network unreliability and latency on the classifier performance by varying
the transmission power level (3, 6, 9, and 12), the number of transmissions per message
(1, 2, 3, 4, 5), and the classifier latency (5, 10, and 15 seconds). In all, we run a total of
280 experiments using 16 different parameter configurations (a subset of the possible
parameter space). Analyzing the timestamped measurements at the nodes and at the
classifier, we identify in Figure 4.6 the parameter values which best demonstrate the
variability in the estimator performance as a function of reliability and latency. We
use the notation MAC(P,T,L), where P is the power setting, T is the total number
of transmissions, and L is the latency in seconds.
89

0 10 20 300
0.1
0.2
0.3
0.4MAC (9,1,5)
0 10 20 300
0.1
0.2
0.3
0.4MAC (9,1,10)
Pro
babi
lity
0 10 20 300
0.1
0.2
0.3
0.4MAC (9,1,15)
Estimated Influence Field
0 10 20 300
0.1
0.2
0.3
0.4MAC (9,3,5)
VehicleSoldier
0 10 20 300
0.1
0.2
0.3
0.4MAC (9,3,10)
Pro
babi
lity
0 10 20 300
0.1
0.2
0.3
0.4MAC (9,3,15)
Estimated Influence Field
Figure 4.6: Probability distribution of the estimated influence field as a function ofmedia access control (MAC) power, transmissions, and latency. MAC(P,T,L), whereP is the power setting, T is the total number of transmissions, and L is the latencyin seconds.
The confusion matrix for MAC(9,1,5) is shown in Table 4.1. The classifier perfor-
mance is clearly unacceptable with this optimistic single transmission per node and
a classifier latency of 5 seconds.
We find that increasing the latency to 10 seconds, as shown in MAC(9,1,10),
improves the classifier performance to 100%. Recall, however, that we used a lumped
parameter approach that did not attempt to characterize the influence field over the
90

Soldier Vehicle
Soldier PCS,S= 31% PCS,V
= 69%Vehicle PCV,S
< 1% PCV,V> 99%
Table 4.1: The confusion matrix for the influence field classifier for MAC(9,1,5) as-suming the PCV,V
> 99% requirement is met.
entire range of all possible parameters. Consequently, the probability distributions of
the influence fields would likely have greater variance than our test cases indicate and
would likely overlap, reducing the discriminability to an unacceptable level. Since
increasing the latency from 5 to 10 seconds improves the classifier performance, we
are motivated to further increase latency, to 15 seconds, as shown in MAC(9,1,15).
We find, however, that no further improvement in discriminability results from this
increase in latency. We still remain interested in improving the classifier performance,
so we must consider other parameters.
Turning our attention to reliability, we attempt to transmit each message at most
three times (i.e. two retransmissions) and with a latency of 5 seconds. The results
are shown in MAC(9,3,5). We find that our attempt to increase network reliability
has actually decreased the discriminability of the target classes since the probability
distributions now overlap even more so than with MAC(9,1,5). We attribute this poor
performance to the increased traffic generated from retransmissions and its attendant
effects on collision and congestion. Next, we try MAC(9,3,10) and notice an improve-
ment over MAC(9,3,5) in that the discriminability has improved. We also note the
MAC(9,3,10) results in a distribution whose variance is smaller than MAC(9,1,10).
91

Encouraged by the positive trends in both separating the means and decreasing the
variances, we investigate MAC(9,3,15) and find that it offers the best discriminability.
We notice that while MAC(9,3,15) offers the best overall performance, the worst
case network reliability is approximately 50%, since only one-half of the detections at
the nodes are actually available to the classifier. We also note that the network loss
rate varies according to target class. There is less variation in the soldier’s influence
field than in the vehicle’s, as estimated at the classifier across all of our tests. The
soldier’s estimated influence field ranges from 9 in MAC(9,1,5) to 6.4 in MAC(9,3,5),
a decrease of 27% and 48%, respectively, from the measured value of 12.2. In con-
trast, the vehicle’s estimated influence field ranges from 21.2 in MAC(9,3,15) to 7.7
in MAC(9,3,5), a decrease of 51% and 82%, respectively, from the measured value of
43.5. In other words, the network delivers approximately twice the reliability for a
soldier than it does for a vehicle. We attribute this wide variation to the different
levels of traffic that are generated isochronously for the different target classes. As-
suming a 10% margin of error in the influence field estimation and greater than 99%
classification accuracy, we find that the acceptable lower bound on network reliability
for classification is approximately 50%.
We have focused our attention on discriminating soldiers from vehicles. We now
turn to sensor fusion in order to address the classification of persons, and to make our
detection of soldiers and vehicles more robust. Recall that the radar motion sensors
detect all of the target classes but only the ferro-magnetic targets are detected by
the magnetic sensors. Consequently, we can fuse these two sensing modalities into a
single predicate that the classifier evaluates at the end of each window to determine
whether a person, and only a person, is present
92

We also use sensor fusion to make the detection of soldiers and vehicles more
robust
soldier = magnetic ∧ (f < x∗) (4.13)
vehicle = magnetic ∧ (f ≥ x∗) (4.14)
where f is the estimated influence field and x∗ is the decision boundary that minimizes
the classification error rate. In our case, x∗ = 14.
93
CHAPTER 5
TOWARDS UWB RADAR-ENABLED SENSORNETWORKS
Ultrawideband (UWB) radar-enabled sensor networks have the potential to ad-
dress key sensing, classification, tracking, and localization challenges common to many
intrusion detection applications. We investigate the suitability of UWB radar as a
sensing technology for resource-constrained sensor networks. We consider sensor-
specific factors like range, power, latency, interference, and size. In addition, we also
consider low space, time, and message complexity algorithms for signal detection,
parameter estimation, and target classification. Our work is grounded in off-the-
shelf sensor and processor hardware along with some custom supporting electronics.
Preliminary laboratory experiments and field trials demonstrate promising results al-
though much work remains before the sensors can be deployed in unknown or hostile
environments.
5.1 Introduction
Traditionally, intrusion detection systems have used infrared, acoustics, seismic,
and magnetics for passive sensing, and optics and ultrasonics for active sensing,
94

but radar has been conspicuously absent. Conventional radio detection and rang-
ing (radar) systems employ transmitted and reflected microwaves to detect, locate,
and track objects over long distances and large areas. Due to its versatility, radar has
found applications in defense, law enforcement, meteorology, and mapping. However,
widespread commercial applications of radar have been limited because conventional
systems are expensive, bulky, and difficult to use.
A new kind of radar sensor system based on time domain reflectometry (TDR)
techniques and ultrawideband (UWB) technology was developed in the mid-1990s at
Lawrence Livermore National Labs [48]. Livermore’s tradename for its version of the
sensor is micropower impulse radar or MIR. Livermore’s MIR sensors are inexpensive,
compact, and low-power – while still offering detection, ranging, and velocimetry
capability – which makes them ideal for use with wireless sensor networks. MIR,
like conventional radar, uses transmitted and reflected microwaves. However, unlike
conventional systems that transmit bursts of narrowband continuous waves, MIR
uses very short, and consequently ultrawideband, pulses and is therefore also called
ultrawideband radar or just UWB radar. These short pulses contain very little energy
but since the energy they do contain is spread across a broad range of frequencies,
UWB signals are better able to penetrate obstacles and are more immune to multipath
effects. UWB radar technology has been used for proximity detectors, motion sensors,
rangefinders, electronic dipsticks, graphics tablets, stud finders, and tripwires. For
the remainder of this work, we will use the term “UWB radar” or simply “radar”
when referring to ultrawideband radar sensors which operate on this principle.
As an active rather than passive technology, UWB radar has a larger sensing
radius than either infrared or magnetic sensors and consequently UWB radar can
95
be deployed in lower densities. UWB radar sensors require neither line-of-sight like
infrared sensors nor exposure to the environment like acoustic sensors, making them
easy to conceal inside of trees, rocks, or other objects which are impervious to light
and sound. For foot traffic, UWB and seismic sensors offer similar sensing range
but unlike seismic sensors, UWB radars do not need to be staked into the ground.
UWB radars are active sensors since they transmit short bursts of RF energy but
since their transmissions are very short, the pulses usually appear to be background
noise. The sensors can be made both difficult to detect and resistant to jamming by
dithering the pulse repetition rate or using other coding techniques. In addition to
these benefits, UWB radar-enabled sensor nodes can determine an object’s range and
speed, and in some cases, estimate an object’s size. It is for these and other reasons
that radar-enabled sensor networks promise a new level of performance in wide-area
intrusion detection systems.
5.2 Theory of Operation
Ultrawideband radar is available in two broad categories: pulse Doppler and pulse
echo. Pulse Doppler radar operates on the Doppler principle and is primarily used
for motion sensing. Pulse echo radar employs time-of-flight and is typically used as
a rangefinder. For this work, we use pulse Doppler radar sensors. Consequently, for
the remainder of this work, when we refer to UWB radar, we mean pulse Doppler
radar unless explicitly stated otherwise.
UWB radar works by transmitting a short pulse and listening for its reflection.
If the object that reflects the transmitted pulse is moving, then the frequency of the
reflected pulse will be Doppler-shifted to a frequency that is slightly different from the
96

transmitted pulse. The reflected pulse with frequency f ′ is related to the transmitted
pulse with frequency f through the familiar Doppler equation
f ′ = f(
c
c± vo
)(5.1)
where c is the speed of light, vo is the speed of the object, and ± is chosen such
that f ′ > f when the object is moving toward the sensor. An UWB radar does not
wait indefinitely for a reflection. Rather, the waiting period is configurable between
a minimum and maximum value. This waiting period also corresponds to the round-
trip-time of the signal. Since the propagation speed of the signal is constant, the
round-trip-time implies a distance or “range gate” outside of which objects are not
detected.
An UWB motion sensor mixes the transmitted and reflected pulses in a manner
that computes the difference, ∆f , between these two signals. This difference results in
the familiar beat frequency which is then capacitively coupled, eliminating DC bias,
and low pass filtered, eliminating high frequency components due to fast-moving ob-
jects. In essence, the signal is band-limited to the range of frequencies that correspond
to the range of valid vo values for our objects of interest. This filtered signal is usually
made available through an analog output port on the sensor.
The output of the mixer, ∆f , is the difference between the transmitted and re-
flected frequencies
∆f = f − f ′ (5.2)
which can be written
∆f = f(1− c
c± vo
)(5.3)
97

rearranging to solve for vo and simplifying
vo = ±c
(∆f
f −∆f
)(5.4)
Since we know c and f , if we can estimate ∆f , then we can also determine vo.
For example, if a UWB radar with a 2.4GHz center frequency outputs a signal with
∆f =16Hz, an object would be moving with a radial velocity of 2m/s.
We can further simplify the computation by recognizing that for the objects of
interest to us, ∆f << f , so
vo = ±c
(∆f
f −∆f
)(5.5)
becomes
vo ≈ ±c
(∆f
f
)(5.6)
and a signal’s wavelenth λ = c/f gives
vo ≈ ±∆fλ (5.7)
and a signal’s period ∆T = 1/∆f gives
vo ≈ ±λ/∆T (5.8)
A sinusoidal signal encounters a zero-crossing every ∆Tz = ∆T/2, which corresponds
to half of a wavelength. Estimating ∆Tz is a matter measuring the elapsed time
between successive zero crossings.
In addition to the target object, the transmitted pulse is reflected or “scattered”
by other nearby objects like rocks, trees, and walls which are of no interest. We
refer to these useless reflections as clutter. The strength of a reflection is a function
of an object’s shape, size, permittivity εr, and permeability µr. Fortunately, most
98

of the objects that cause clutter are stationary and their reflections, no matter how
strong, are filtered out. Therefore, in theory, the beat frequency due to clutter is
zero and the sensor’s analog output is a constant voltage. However, in practice, we
find that some background noise (e.g. due to environmental effects or thermal noise)
and clutter noise (e.g. due to a leaf fluttering in the wind) do have an effect on
the sensor’s output. Some of this noise is also filtered out but some of it is not.
Distinguishing between noise and a signal of interest due to a legitimate object is the
topic of detection.
5.3 Sensor Platform
Our sensor platform consists of several circuit boards including a processor/radio
board, an ultrawideband radar motion sensor, and a generic sensor board. While
these devices are available off-the-shelf, no off-the-shelf products were found which
were suitable for the interface circuitry or the packaging, so custom electronics and
enclosures were used. Figure 5.1 shows the stack of circuit boards used to implement
our sensor network node.
5.3.1 Radar Sensor and Antenna
We used the TWR-ISM-002 sensor shown in Figure 5.2 and available from Ad-
vantaca [49] as our radar sensor platform. This sensor detects motion up to a 60ft
radius around the sensor but this range is adjustable to a shorter distance using an
onboard potentiometer. The sensor includes a 51-pin connector designed to interface
mechanically with the expansion connector on the Mica Motes [41]. The sensor re-
quires 3.4V - 6.0V (nominally 3.6V) and draws less than 1mA from this supply. The
99

Figure 5.1: Radar sensor network node electronics. The circuit boards from top tobottom are: (i) dipole antenna for transceiving the radar signal, (ii) radar sensor,(iii) interface/power board, (iv) generic sensor board, and (v) processor/radio board.The battery case which holds two AA batteries can be seen at the bottom of the stack.
unit also requires a precise power source to provide 5.5V with a ±1% tolerance and
draws a nominal 7.5mA from this second supply.
The sensor provides a fast-attack and slow-decay digital output meaning that the
output is asserted immediately after detecting a target but is not unasserted until
approximately one second after the target is no longer detected. The sensitivity, like
the range, can be adjusted using a potentiometer. Adjusting the sensitivity simply
varies the detection threshold used for the digital output. We found the sensor’s
digital output had a high false alarm rate outdoors even though indoors, the digital
output performed quite well.
In addition to the digital output, an analog output is available. The analog
output is a lowpass-filtered version of the Doppler baseband signal. The lowpass filter
response has a 3 dB/octave drop-off above 18 Hz and an additional 12 dB/octave
above 220 Hz. The analog output signal varies from 0V to 2.5V and is nominally
biased at 1.25V when there is no motion. When a target is moving within sensing
100

range and with a radial velocity component, the analog output oscillates between 0V
and 2.5V. The output is a noisy, potentially clipped, weighted sum of sinusoids whose
frequencies are related to the radial velocity of each reflecting surface (e.g. chest,
arms, legs, etc.) and whose amplitude is related to the strength of the reflection.
Since our application required robust detection outdoors, we used the analog output
and digitally processed the signals using the detection and estimation algorithms
presented in this work.
Figure 5.2: Advantaca TWR-ISM-002 pulse Doppler ultrawideband radar motionsensor.
The sensor includes a dipole antenna board which mounts on top of the radar
sensor board using an MMCX connector. A null in the antenna plane makes it
possible for a target moving along a radial in this plane to go undetected.
5.3.2 Mica Power Board
Despite the mechanical compatibility through the expansion connector interface,
matching signal pin assignments, and common power pin assignments between the
radar sensor and the Mica mote, the radar does require different and incompatible
101
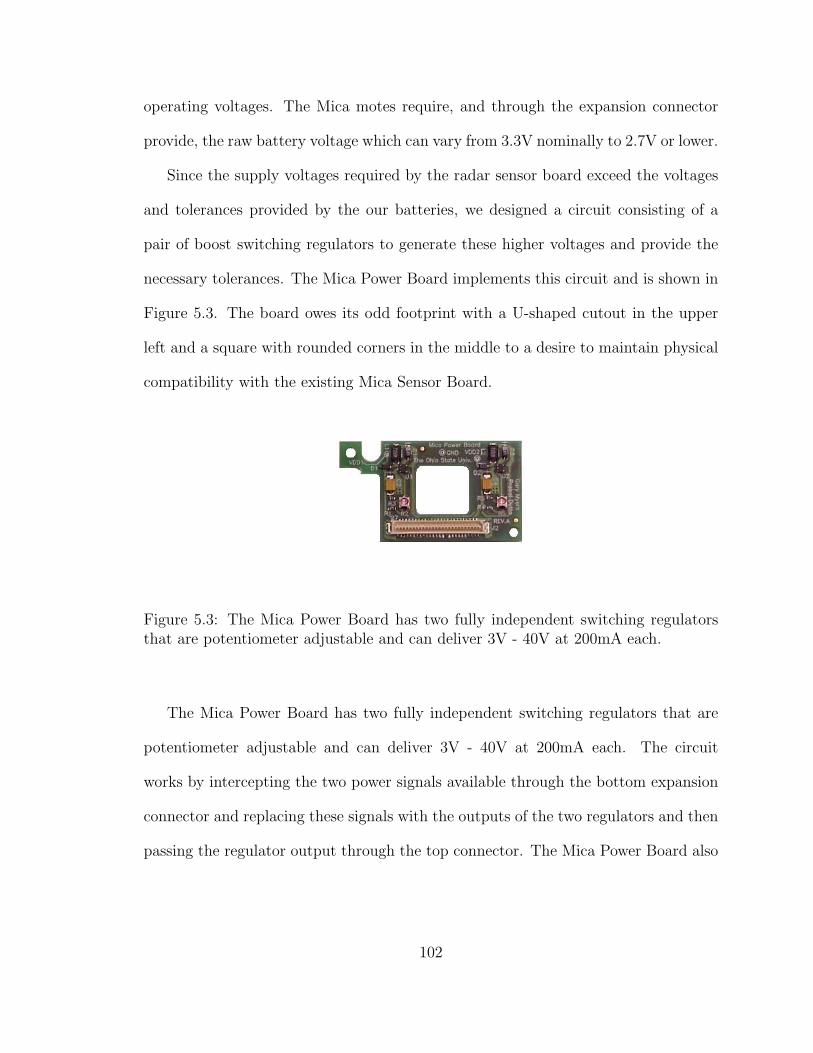
operating voltages. The Mica motes require, and through the expansion connector
provide, the raw battery voltage which can vary from 3.3V nominally to 2.7V or lower.
Since the supply voltages required by the radar sensor board exceed the voltages
and tolerances provided by the our batteries, we designed a circuit consisting of a
pair of boost switching regulators to generate these higher voltages and provide the
necessary tolerances. The Mica Power Board implements this circuit and is shown in
Figure 5.3. The board owes its odd footprint with a U-shaped cutout in the upper
left and a square with rounded corners in the middle to a desire to maintain physical
compatibility with the existing Mica Sensor Board.
Figure 5.3: The Mica Power Board has two fully independent switching regulatorsthat are potentiometer adjustable and can deliver 3V - 40V at 200mA each.
The Mica Power Board has two fully independent switching regulators that are
potentiometer adjustable and can deliver 3V - 40V at 200mA each. The circuit
works by intercepting the two power signals available through the bottom expansion
connector and replacing these signals with the outputs of the two regulators and then
passing the regulator output through the top connector. The Mica Power Board also
102

includes a shutdown feature. When the board is in the shutdown state, power is
simply passed though the board as if it were not present.
5.3.3 Mica Sensor Board
Our sensor node includes the popular Mica Sensor Board. This board includes a
2-axis magnetometer, 2-axis accelerometer, microphone, thermistor, photosensor, and
sounder. We had planned on using the magnetometer but discovered that the mere
presence of the radar interfered with the magnetometer readings. We conducted a
variety of experiments to isolate the source of the interference but in the final analysis,
we were unable to pinpoint the source of the interference.
5.3.4 Mica2 Processor and Radio Board
The familiar Mica2 mote, a derivative of the Mica family of motes developed at
U.C. Berkeley [41], served as our network node. The Mica2 offers an Atmel AT-
mega128L processor with 4KB of RAM, 128KB of FLASH program memory, and
512KB of EEPROM memory for logging. The motes run the TinyOS operating sys-
tem [42], and are programmed using the NesC language [43].
5.3.5 Packaging
Sensor nodes for intrusion detection may experience diverse and hostile environ-
ments with wind, rain, snow, flood, heat, cold, terrain, and canopy. The sensor
packaging is responsible for protecting the delicate electronics from these elements.
In addition, the packaging can affect the sensing and communications processes either
positively or negatively.
103

Our enclosure is smooth and capsule shaped, as shown in Figure 5.4. This shape
provides a self-righting capability and minimizes wind-resistance. The enclosure body
is clear to allow sunlight to illuminate a solar cell mounted inside. Unfortunately, this
has the side effect of heating the electronics to a level at which they intermittently
fail. The sensor electronics are mounted on a frame that attached to the enclosure
shell using a single gimbal mechanism. The gimbal is free to rotate along the long
axis of the enclosure. The frame is asymmetrically weighted in favor of the side
with batteries so that the batteries are on the bottom and a solar cell is on top.
The gimbal mechanism, when coupled with the rotational degree of freedom of the
cylindrical enclosure, increases the likelihood that the radar and radio antennas plane
will be perpendicular to the ground and the solar cell will be pointing toward the sky,
helping to increase the node’s sensing range, communications range, and lifetime.
5.4 Power Considerations
A major concern with the radar circuit used in this work is its power consumption
of nearly 45mW during continuous operation. Unfortunately, this sensor also has a
high-latency initialization process, as can be seen in Figure 5.5.
As a result of this high-latency initialization process, we find this particular sensor
a poor fit as a low-power wakeup sensor. This is not a fundamental limitation of the
technology, however, and we are aware of other radar systems with an “instant on”
capability.
104

Figure 5.4: Self-righting enclosure used for packaging the radar sensor.
5.5 Detection
From a signal processing perspective, detection refers to the process of determin-
ing when a signal of interest is present. To bridge the notion of detecting an object’s
presence with the notion of detecting a signal’s presence, we must have a model
that relates the two. The model should also describe how the sensor will respond to
background noise and clutter noise. The analog output of pulse Doppler radar will os-
cillate about a bias point with frequency components that are principally determined
by speed of moving clutter and moving objects, when present, as well as background
noise. The analog output’s amplitude is determined by the size, shape, permittivity,
and permeability of moving clutter and objects.
105
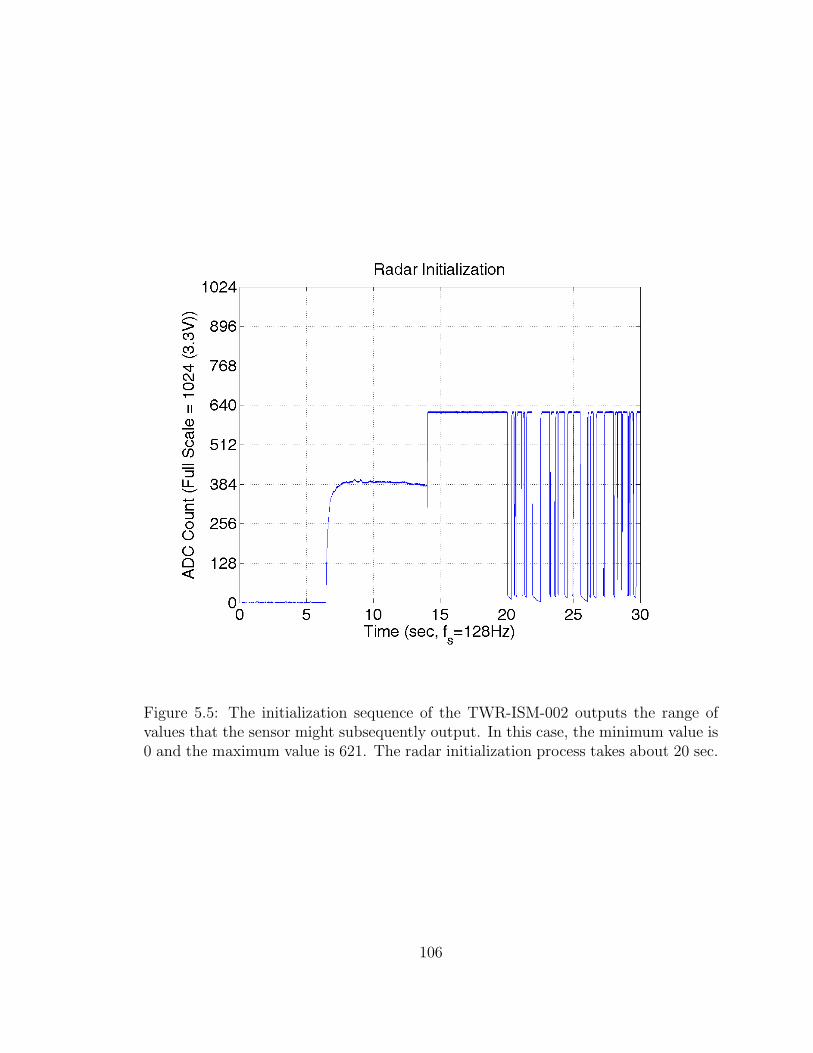
Figure 5.5: The initialization sequence of the TWR-ISM-002 outputs the range ofvalues that the sensor might subsequently output. In this case, the minimum value is0 and the maximum value is 621. The radar initialization process takes about 20 sec.
106
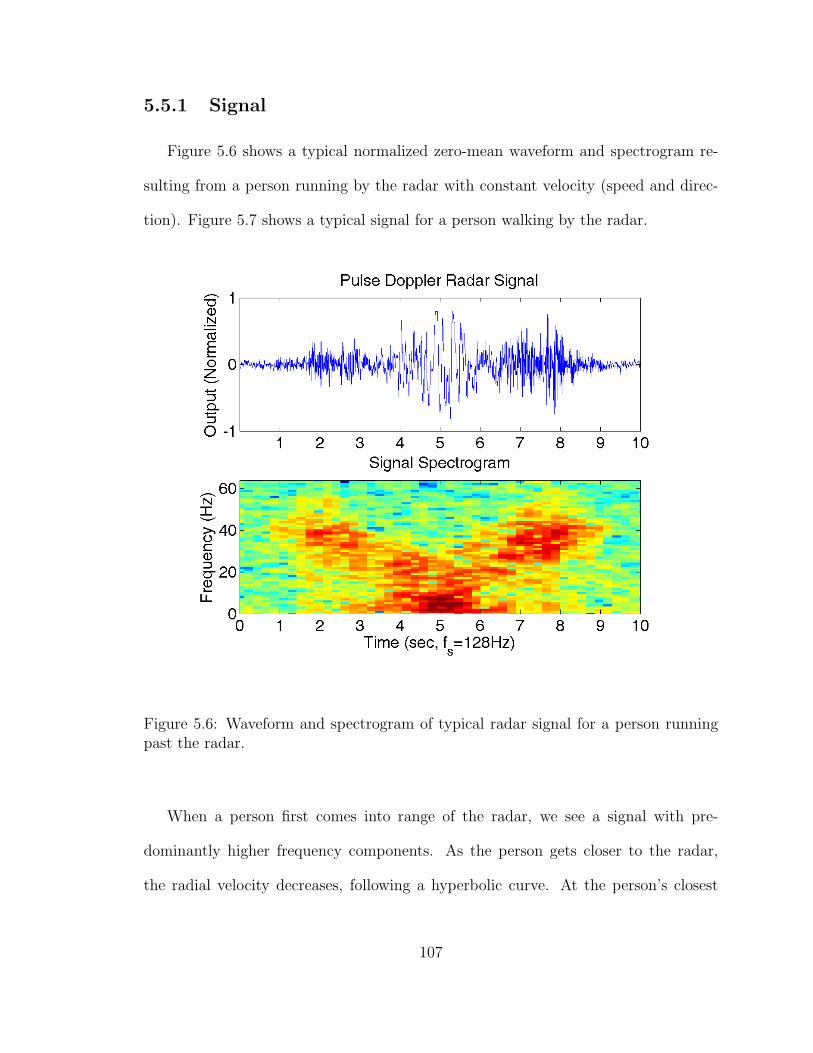
5.5.1 Signal
Figure 5.6 shows a typical normalized zero-mean waveform and spectrogram re-
sulting from a person running by the radar with constant velocity (speed and direc-
tion). Figure 5.7 shows a typical signal for a person walking by the radar.
Figure 5.6: Waveform and spectrogram of typical radar signal for a person runningpast the radar.
When a person first comes into range of the radar, we see a signal with pre-
dominantly higher frequency components. As the person gets closer to the radar,
the radial velocity decreases, following a hyperbolic curve. At the person’s closest
107

Figure 5.7: Waveform and spectrogram of typical radar signal for a person walkingpast radar.
108

point-of-approach (CPA) to the radar, the radial velocity approaches zero, assum-
ing a non-zero CPA. At this point, lower frequency components dominate the power
spectrum. Then, as the person moves away from the sensor, essentially the mirror
image of the first half of the waveform is repeated. Figures 5.8, 5.9, and 5.10 show
additional radar waveforms.
Figure 5.8: Sample signal data for person walking past sensor. The red line is theestimated bias, computed as the mean of the data set.
109
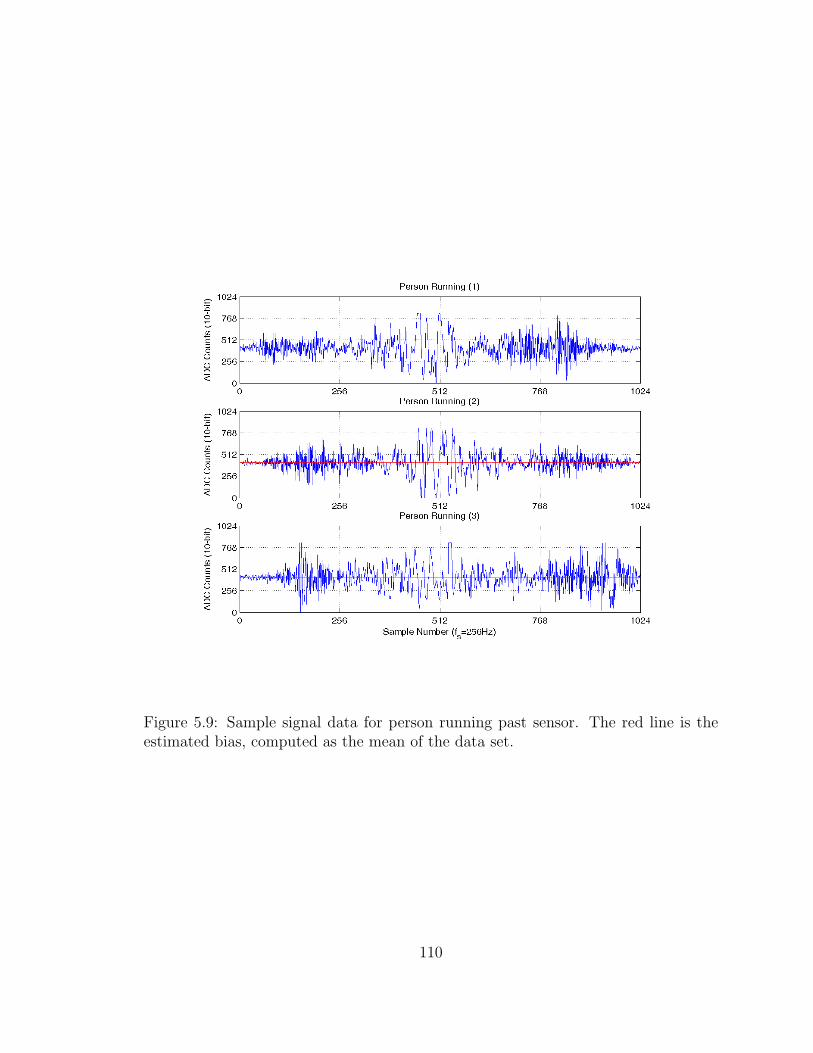
Figure 5.9: Sample signal data for person running past sensor. The red line is theestimated bias, computed as the mean of the data set.
110
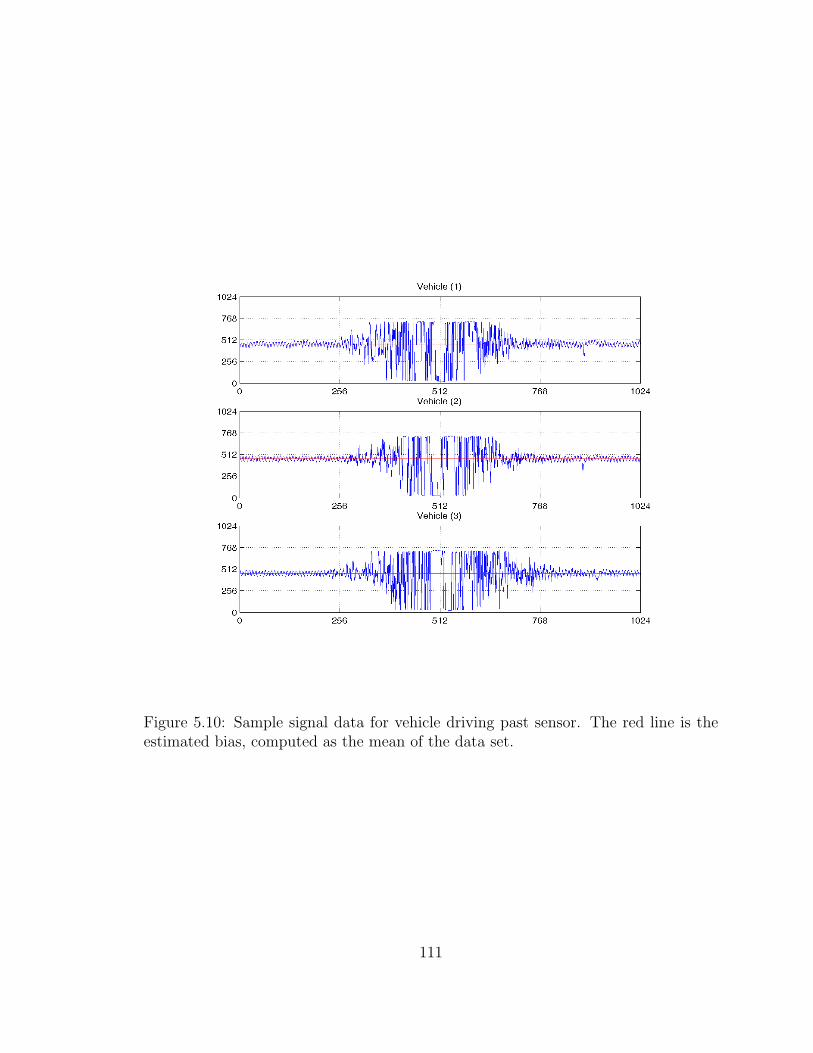
Figure 5.10: Sample signal data for vehicle driving past sensor. The red line is theestimated bias, computed as the mean of the data set.
111
5.5.2 Noise and Clutter
Background noise tends to be normally distributed and wide sense stationary over
time constants larger than the time constant of a typical passing object. However,
background noise may not be wide sense stationary over much larger timescales due,
for example, to solar or meteorological effects. Similary, we note that there are
occasions in which the noise is not independent and identically distributed. That
is, we find the occasional presence correlated of noise. This is particularly true for
clutter noise due to a fluttering leaf, a flying bird, or heavy rainfall, for example,
and is more difficult to discriminate from signals caused by the motion of legitimate
targets of interest. Figure 5.11 shows the observed noise at several different times
and locations.
In the time domain, which is what we are practically limited to on processors
of this class, the main differences between clutter and objects of interest are that
clutter sometimes has a lower energy content (i.e. the signal amplitude is smaller)
and frequently tends to be more bursty (i.e. lasts for a shorter period of time than
legitimate targets) but occasionally tends to far less bursty (i.e. lasts for a longer
period of time than a legitimate target).
5.5.3 Energy Detector
Initially, we used a binary-hypothesis energy detector to discriminate between
noise (H0) and a signal of interest (H1). After subtracting the bias from the radar’s
analog output, the signal is averaged over a moving window of size N and squared to
compute the energy, E. The window size N is chosen to be small enough so that the
detector is agile and large enough that the detector is stable in the presence of noise.
112
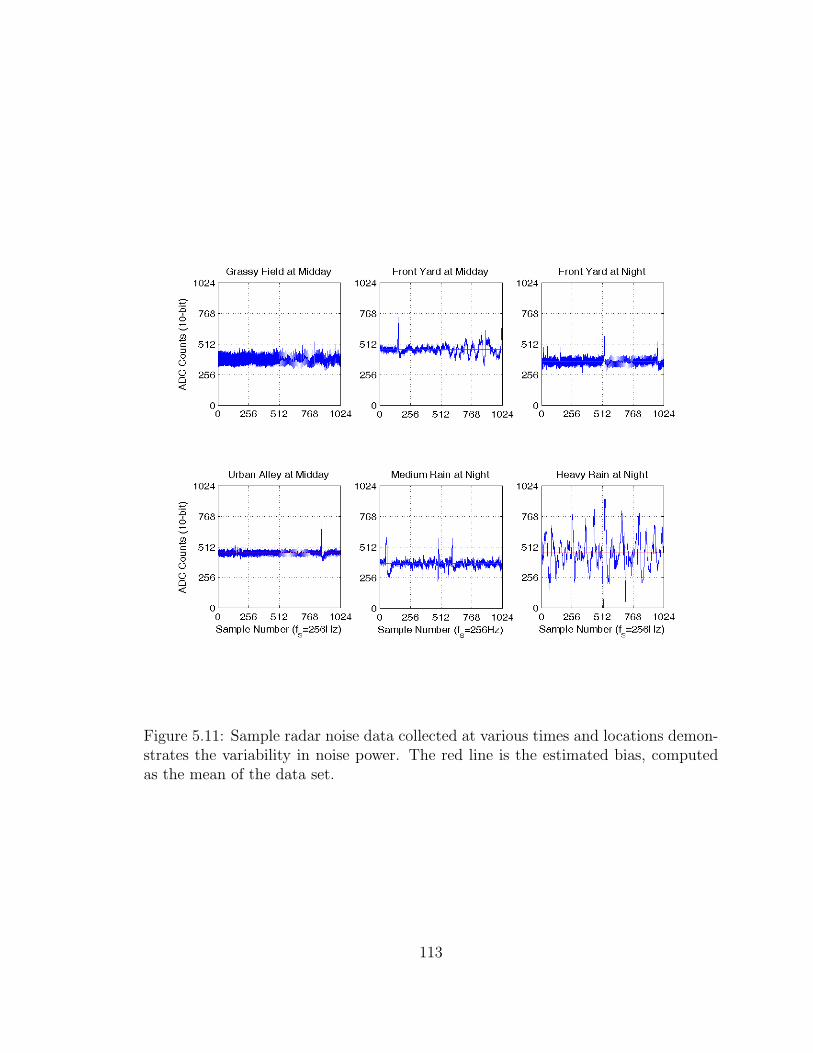
Figure 5.11: Sample radar noise data collected at various times and locations demon-strates the variability in noise power. The red line is the estimated bias, computedas the mean of the data set.
113

Determining the bias point requires care since over short intervals, the signal is
often skewed. One way to address this issue is to use a longer window when computing
the bias. In our implementation, the average bias x is determined over the trailing
Nk samples of the raw signal. In order to conserve memory, this computation is
performed hierarchically and with a block scheme modulo N , resulting in a space
complexity of kN . The value of Nk is chosen such that it reflects the time constant
of the environment and is empirically determined by application of the Central Limit
Theorem until filtered background noise has Gaussian statistics.
Variations in individual sensors or battery levels can also affect the signal statistics
across different sensors or on the same sensor over time. In our case, the UWB radar
sensors are powered from a DC boost regulator which maintains a constant output
voltage even when the input battery voltage sags. However, there is no such boost
regulator for the processor or its ADC voltage reference. As a result, when the battery
voltage sags, the both the bias point and signal of the UWB radar sensor appear to
increase. While it is possible to compensate for battery droop using the internal
bandgap reference in the processor, such an approach is not sufficient since there are
still other effects that affect the bias point.
A similar approach is used to determine the average energy E of the background
noise over a similarly long time interval. Since even the background noise varies over
large timescales, a constant false alarm rate (CFAR) detector is used to provide an
adaptive decision threshold, γ, for the energy detector. The detector decides
H =
H0 if E ≤ γH1 if E > γ
where γ is computed
γ = ασE + E (5.9)
114

where the value of α is the one that satisfies
PFA = 1−∫ α
−∞
1√2π
e−12x2
dx (5.10)
for a required false alarm rate, PFA.
Unfortunately, the CFAR energy detector is not immune to clutter noise like
fluttering leaves or heavy rain. The types of correlated noise and clutter shown in
Figure 5.11 is quite prevalent in our waveforms and hence must be dealt with in our
detection algorithms to achieve acceptable false alarm rates. Traditionally, discrimi-
nating such clutter from legitimate objects requires additional signal processing but
we will consider another method.
5.5.4 Histogram-similarity Detector
A simple CFAR energy detector will fail in the presence of highly-correlated noise
or clutter. It may be possible to reduce the false alarm effects of correlated noise by
averaging the signal over a longer window or by estimating additional parameters of
the signal, but this approach requires greater memory and processing. An alternate
detector design that better discriminates clutter from a legitimate object, without
increasing algorithmic complexity, is desirable.
Due to the issues with a simple energy detector, we implemented a different detec-
tion algorithm based on histogram matching. The motivation behind this approach
is due to the discernable probability distribution functions (PDF) of signal, clutter,
and noise. Our observation is that it is simpler to directly correlate the prototype
PDFs with the observed PDFs and select the prototype class with which the observed
samples has the strongest correlation.
115

The details of our approach are as follow. The sensor output is normalized and
quantized. The output of the quantizer is histogrammed over a moving window.
The quantization level, window size, and window overlap are all adjustable. The
bins in each histogram window are converted to elements in a test vector which is
then compared with a set of prototype vectors. The hypothesis corresponding to the
prototype which has the highest correlation to the test vector is selected.
Figure 5.12 shows a moving histogram of the radar signal amplitude as a result
of ambient background noise and heavy rain. Figure 5.13 shows a moving histogram
of the radar signal amplitude as a result of a person walking by and a car driving
by. Notice the conspicuously dense clusters near the top and bottom bins for the
car and person, but the absence of a dense cluster near the top and bottom bins in
the cases of background noise and heavy rain. Conversely, notice the conspicuous
absence of high density clustered near the middle bins for the car and person, but
the presence of high density near the middle bins in the cases of background noise
and heavy rain. By finding the greatest correlation between a sampled histogram and
a set of pre-collected prototype histograms or priors, the detector can discriminate
many types of clutter from objects of interest. Our approach essentially compares
the probability densities of the sampled data and prototypes directly.
Normalization and Quantization
A feature of the TWR-ISM-002 sensor is that within the first 30 seconds or so after
being powered up, the sensor enters an initialization phase during which it outputs
a signal that spans the entire range of values the sensor might subsequently output
during normal operation, as shown in Figure 5.5.
116

Figure 5.12: Signal amplitude (raw) and moving histogram (normalized) of radaroutput due to background noise and heavy rain taken over a 32 second period with asampling rate of 128Hz and a histogram window, bins, and overlap of 256, 0, and 16,respectively.
We monitor the output of the sensor during this time and store the minimum and
maximum amplitude values, Amin and Amax, respectively, that are observed. These
values are then used to precompute a mapping function between the sensor output and
the normalized and quantized values used for histogramming. The mapping function
uses a binary search and can map an input value onto an output value with only
O(lgN) comparisons, where N is the number of quantization levels. In contrast, if
computational resources were not at a premium, a normalize and quantize operation
117

Figure 5.13: Signal amplitude (raw) and moving histogram (normalized) of radaroutput due to a walking person and passing vehicle taken over a 32 second periodwith a sampling rate of 128Hz and a histogram window, bins, and overlap of 256, 0,and 16, respectively.
for each sample x might look like:
normquant(x) =(x− Amin)×N
Amax − Amin
(5.11)
Some efficiencies may be possible if, for example, N ∈ 2i : i ∈ 1, 2, 3. . . .
but a binary search should be more efficient than multiplication and division, since
processors of this class may lack hardware support for such operations.
118

Another possibility is to use integer operations, which is faster than floating point
operations, but doing so introduces rounding errors. For example, consider the fol-
lowing integer implementation of the map function:
void map1(int Amin, int Amax, int* bins, int N)
int i;
int range = Amax - Amin;
int step = range / N;
for (i = 0; i < N; i++)
bins[i] = step * i;
bins[15] = Amax;
Calling map1(0, 621, bins, 16) returns with the following elements in the bins
array:
0,38,76,114,152,190,228,266,304,342,380,418,456,494,532,570
These values are skewed due to rounding errors. A floating point implementation
of the same function does not suffer from this problem:
void map2(float Amin, float Amax, int* bins, int N)
int i;
float range = Amax - Amin;
float step = range/N;
for (int i = 0; i < N; i++)
bins[i] = (int)(step * i);
bins[N-1] = (int)Amax;
Calling map2(0, 621, bins, 16) returns with the following elements in the bins
array:
119

0,38,77,116,155,194,232,271,310,349,388,426,465,504,543,582
In this example, map1’s N -th bin spans 570 to 621 compared with map2’s N -th
bin which spans 582 to 621. The rounding error causes the true size of the N -th bin
to be distorted by 31%.
Histogramming
We use a moving histogram that takes two parameters – window size and window
overlap – to partition the sampled waveform into (possibly overlapping) blocks and
generates a histogram for each such block. The histogrammming process is shown
in Figure 5.14. The output of the histogramming process is a vector whose length
equals the number of bins in the histogram and whose output frequency is window
size divided sampling rate.
Correlation-based Similarity Matching
Once the sampled waveforms have been transformed into a sequence of histograms,
we look for the greatest correlation between each histogram and a set of prototype
histograms which have been previously collected and labeled. A high correlation
implies a high level of confidence whereas the absence of a strong correlation might
imply that a new class has been observed. We find the approach of directly comparing
PDFs to be remarkably efficient yet effective. This approach is particularly useful
since we have limited a priori knowledge of the classes. Of course, this approach
will not work in some cases. For example, the PDFs of two sinusoids of the same
amplitude but different frequencies cannot be discriminated using this approach.
120

window width
window overlap
h i s
t o g
r a m
time
Figure 5.14: Moving histogram over radar waveform.
121

CHAPTER 6
ETA: THE ELAPSED TIME ON ARRIVAL PROTOCOL
Time synchronization, or simply timesync, in wireless sensor networks refers to the
problem of synchronizing clocks across a set of sensor nodes which are connected to
one another over a single- or multi-hop wireless communications channel. Timesync
is useful for establishing the temporal ordering of events or deterministic temporal
bounds on events. Timesync also may be used to coordinate future actions at two
or more nodes. In this work, we present a simple post facto time synchronization
protocol that maintains the elapsed time since an event occurred without the need
for a calibration process, explicit reference pulses, or periodic reference broadcasts.
6.1 Related Work
A number of algorithms have been proposed for time synchronization in wireless
sensor networks. An analysis of the essential issues surrounding timesync for sensor
networks can be found in [50]. An more indepth analysis of timesync can be found
in [51]. These algorithms can be divided into proactive and reactive classes.
Proactive algorithms attempt to maintain synchronized clocks through the use of
periodic messages and include [52, 53, 54, 55]. Periodic messages are required since
clocks run at different rates. The crystals used to make clocks oscillate at slightly
122

different frequencies due to manufacturing variations and these small differences cause
the clocks to skew over time. The amount of skew is influenced by several factors
including crystal accuracy and temperature coefficients. Proactive timesync, and in
particular global timesync, is well suited to data collection applications which must
synchronize observations across the networks or for applications that use a store and
forward mechanism.
Reactive algorithms synchronize clocks post facto rather than periodically. A
major benefit of such algorithms is reduced power consumption due to the lower
messaging frequency. In [14], an algorithm substantially similar to ours is proposed.
A drawback to the algorithm is the requirement for multiple floating-point operations
at each node. Perhaps more important is that this earlier work assumes it is difficult
to estimate message delays between nodes. This assumption is likely due to the
queuing, randomness, and contention that may occur in the media access control
layer of many networks. The desktop-class computers used in this study typically do
not provide a way to estimate the delay between the time a message is enqueued to
the transmit buffer and the time a message is actually transmitted. However, with
the advent of specially-designed operating systems like TinyOS [42] and integrated
sensor nodes like the Mica motes, event callbacks that are invoked at the actual
time of message transmission. By passing a pointer to the message buffer in the
event callback, the callee can set the timestamp field in the message deterministically.
This idea has been extended to the newest generation of radios that have transmit
queues. For example, the Chipcon CC2420 radio, which supports the IEEE 802.15.4
standard, allows random access into the transmit FIFO during transmission of a
frame and provides hardware interrupts as each bit of the frame is being transmitted
123
[56]. UCLA’s Reference Broadcast System (RBS) is perhaps the best known post
facto timesync algorithm [57]. This algorithm uses a transmitter node to synchronize
the clocks of two receiver nodes to each other.
6.2 Elapsed Time on Arrival
We argue that a global timesync service is not required for event detection ap-
plications. Frequently, timesync’s role in event detection is to correlate in time ob-
servations that occur across space. The need to correlate these observations stems
from the fundamental requirements of the application itself. False alarm rates can
be lowered if multiple, geographically-close, sensors observe the same event at nearly
the same time. Tracking an object requires estimating its spatio-temporal position
with respect to a common space-time basis, which requires localization in addition to
timesync.
Our key observations is that with deterministic MAC-layer timestamping, we can
eliminate the calibration phase that is required in [14] and [57] as well as the need
for a “third party” node in [57] and Single-Pulse Synchronization found in [51].
The ETA algorithm works by storing the time of an event occurrence in a node’s
local time. Local-time conversions occur whenever messages are transmitted from
one node to another. That is, whenever a message is transmitted, the elapsed time
is computed and included as a separate field in the message. On receipt, a node
computes the event time but subtracting the elapsed time from the receiving node’s
local time. This approach allows all time-related state to be kept within the message
and is particularly useful if a the same node must retransmit a message repeatedly,
perhaps due to congestion or a poor link.
124

OnEvent()
Message message;
message.eventTime = GetLocalTime();
Enqueue(message);
OnBeginTransmission(Message message)
message.elapsedTime = GetLocalTime() - message.eventTime;
OnReceive(Message message)
message.detectTime = GetLocalTime() - message.elapsedTime;
Enqueue(message);
Figure 6.1: Elapsed Time on Arrival (ETA) algorithm.
The details of our algorithm are shown in Figure 6.1. Each node keeps a free
running local clock or timer accessible through the GetLocalTime call. On an event
occurrence, the local time is noted and stored in an event message’s eventTime field.
The event message is then enqueued for transmission. When the event message has
been scheduled for and begins transmission (ostensibly after some delay in the media
access control layer), the timestamp of the event (eventTime) is subtracted from the
then-current value of the timer and this difference (elapsedTime) is also inserted into
the message being transmitted.
The performance of this algorithm is principally affected by two factors. First,
variations in crystal oscillator frequencies will result in variations in the accounting
of elapsed time. If the oscillator frequency has a symmetric distribution, and an
125
estimate of the mean frequency is known, then the errors could cancel each other out.
Second, variations in the jitter of the media access control layer might also result in
variations in the accounting of elapsed time.
126
CHAPTER 7
RARE: THE REACTIVE RANGE ESTIMATIONPROTOCOL
We study the relationship between mobility and ranging in the context of wireless
sensor networks. We observe that a mobile object can aid sensor nodes in estimating
the distance to neighboring nodes. These distance estimates are possible without
requiring the nodes to directly range one another or be in coordination with the
mobile object. Distance estimation between nodes is an important prerequisite for
many existing localization algorithms. In this work, we present an algorithm for
estimating inter-node distances as a function of coordinated range measurements to a
mobile object. The algorithm’s complexity is related to the complexity of the mobile
object’s trajectory and the required accuracy in range estimation. For a constant-
speed, straight-line trajectory, the algorithm is expected to estimate range with two
distinct passes of the mobile object. For a variable-speed, straight-line trajectory,
our algorithm can estimate range with a modestly greater complexity than the first
case. As the trajectory’s complexity increases, increasingly complex computations
are required, culminating in a quadratic optimization problem. Our approach is
distinct from prior approaches to estimating inter-node distances in that the nodes
do not estimate this distance by directly measuring received signal strength or time
127

of flight from another node. Nor do we require that the mobile object know or
communicates its own position. Instead, our approach is based entirely on the nodes
estimating the range to a mobile object in a coordinated fashion and then combining
these range estimates to yield the distance estimate between all pairs or triples of
concurrently observing nodes. We also provide a mechanism for determining the
quality of the estimated distances, allowing nodes to reject measurements that would
likely result in poor distance estimates. The algorithm is distributed and scalable
as all computations and communications are purely local. We validate our approach
through both simulated and empirical results.
7.1 Introduction
This section provides a brief background on the problem of localization in wireless
sensor networks and describes the problem’s frequent dependence on distance esti-
mation between neighboring nodes. Then, the motivation underlying this approach
to distance estimation is explored. Finally, the organization of the remainder of the
work is presented.
7.1.1 Background
Wireless sensor networks hold great promise as an enabling technology for a va-
riety of monitoring applications. Many such applications require that the sensor
network report the time and location of an event. Time synchronization addresses
the problem of establishing a coordinated notion of time. Localization is concerned
with establishing a spatial coordinate system and determining the positions of the
sensor nodes and other objects of interest within this coordinate system.
128

In some applications, the sensor nodes may number in the thousands or be de-
ployed in a manner that results in random positions and orientations. Additionally,
the nodes may move, be moved, or become inaccessible after deployment. In such
cases, it may not be practical to individually configure each node with its position. A
canonical application exemplifying these possibilities is the detection and tracking of
targets traveling through an area in which sensor nodes have been deployed randomly
[15]. In such applications, the past, present, or future locations of the target must
be estimated with respect to a local or global coordinate system. In order to specify
the target location with respect to the coordinate system, the sensor nodes must be
aware of their own positions within this coordinate space; hence the importance of
localization in detection and tracking applications of sensor networks.
Localization is important in many other sensor network applications. There are
cases in which node locations, however crude, are needed soon after deployment. For
example, geographic routing requires nodes to route messages along gradients that are
computed from node locations. For such cases, a simple localization scheme, perhaps
based on hop-count [16], can be used to bootstrap the node positions.
Despite its central role and uniform importance, localization remains a difficult
problem to solve in the general case for a number of reasons including its sensitivity
to range estimation errors, the uncertainty of real deployment environments, and the
need for specialized hardware.
Many localization algorithms rely on the distances between nodes. This distance
estimation is usually implemented with signal strength decay, time-of-flight (TOF),
time-of-arrival (TOA), or time-difference-of-arrival (TDOA). Signal strength is known
to vary with position, orientation, hardware, environment, and complex fading effects.
129

As a result, received signal strength provides widely variable range estimates and is
increasingly avoided as a basis for range estimation. Instead, ranging techniques
based on the propagation speed of signals has been used in the recent literature
to estimate distances. However, such TOF, TOA, and TDOA techniques require
specialized hardware to support the localization system. This additional hardware
adds cost and may not be useful beyond its limited localization function.
7.1.2 Motivation and Approach
The primary motivation for this work comes from the observation that in many
applications, the nodes may be equipped with sensors that can detect the distance
to a moving object, or target, but may not require specialized hardware solely to
support localization, if it were possible to perform it in some other way. Additional
hardware supporting just localization may add uneccesary cost and complexity.
A secondary motivation for this work is based on the observation that both RSSI
and TOA are random functions not of time but of place [58]. Therefore, diversity
in space is likely to improve both of these estimation techniques. By spatially and
temporally averaging these signals, better noise filtering is possible than with just
temporal averaging as would be the case for static nodes ranging each other.
Finally, we also observe that in some situations, a node’s location may not be
needed at all until a target is actully present. In such cases, a lazy localization
strategy, in which nodes only localize when the sensor network is being used to track
an object, may suffice. This approach has the benefit of consuming energy only when
the nodes have a reason to localize.
130

The goal of our work is to realize the following scenario. A set of sensor network
nodes are deployed into a region at unknown locations. A friendly (or unfriendly)
target travels through the sensor network in a structured (or random) walk. The nodes
determine the distance between themselves and their neighboring nodes using the
techniques described herein. Once the node-to-node distances have been estimated,
any one of the available range-based localization algorithms may be used to determine
the position of the nodes. Once localized in this manner, the nodes can multilaterate
the location of targets and report this information if needed.
7.1.3 Organization
Section 7.2 reviews related work on localization in sensor networks. Section 7.3
identifies a variety of techniques for ranging, or estimating the distance between a
target and a sensor node. Section 7.4 describes several algorithms to combine the
node-to-target range estimations into node-to-node distance separations. Section 7.5
describes our experimental methodology, hardware, and software used to test our
algorithms. Section 7.6 provides the results of our work. Section 7.8 identifies areas
of improvement and discusses our future plans. Section 7.7 summarizes our results
and provides our concluding thoughts.
7.2 Related Work
In [59], the authors identify three requirements necessary for distributed algo-
rithms that can be employed on large-scale ad-hoc sensor networks consisting of more
than 100 nodes: self-organizing (i.e. does not depend on global infrastructure), robust
(i.e. tolerant to node failures and range errors), and energy efficient (i.e. require little
computation and, especially, communication). The authors also identify three key
131

context parameters: connectivity, anchor fraction, and range errors. We note that
connectivity and anchor fraction are a common denominator in the sense that for any
given deployment realization, the two parameters are either fixed or outside of our
control. Consequently, we focus on range errors, the only remaining parameter.
In [60], the authors explore the use of a GPS-equipped mobile beacon to provide
three distinct range estimates from three non-collinear points to each node. Bayesian
inference is used to compute successive position estimates. Each new measurement
constrains the probability distribution function representing the node’s position. This
algorithm employs RSSI to determine the distance between the mobile beacon and
the node. While this is the only work that we are familiar with that uses a mobile
beacon in this manner, our work is distinct from it since our work neither requires
that the mobile object, or target, know its own position, nor that it communicate
this information to the nodes.
In [61], collaborative multilateration is presented. Position estimates are obtained
by setting up a global non-linear optimization problem and solving it using iterative
least squares. Both distributed and centralized computation models are presented
and evaluated. Of particular relevance is the proposed method of establishing local
coordinate systems by using laser rangefinders.
In [58], the authors investigate the effects of noise on range estimation. The
paper concludes that range errors owing to RSSI are about twice the range errors
owing to TOA. However, from a Cramer-Rao Bound analysis, the authors argue
that at some density, a location system can perform as well using RSSI and TOA.
A particularly relevant observation of this paper is that both RSSI and TOA are
random functions not of time but of place. Obstructions between a pair of devices
132

that cause shadowing and obstruction of the line-of-sight, or LOS, don’t change over
time. However, two devices placed the same distance apart in a different area would
have a different realization. The authors also note that RSSI and TOA can both be
shown to demonstrate a very close fit to the Gaussian distribution. Based on these
conclusions, we argue that the spatial averaging that is possible using a mobile target
will result in smaller range estimation errors than for static nodes.
In [16], hop count to anchors is used as the basis for initiating localization and
approximating range to a set of anchors. This phase is followed by a refinement
phase in which more accurate positions are computed using the estimated ranges
between nodes. The relevance of this work is that it provides a mechanism that is
complimentary to our approach for cases in which the network requires at least a
crude level of localization.
In [62], a learning theory approach to location estimation is presented. This
approach uses supervised learning, in which systems are trained with a collection of
samples. While similar approaches have enjoyed considerable success other domains
(e.g. robotics), there are some challenges to its use in wireless sensor networks. The
first challenge is the great variability of the real world which could make it difficult to
obtain a representative training set. The second challenge is that learning theory, as
presented, requires that sensor nodes are capable of performing a non-trivial amount
of computation, such as solving reasonably large systems of linear equations.
While our approach bears a resemblance to some of the ideas present in the related
work, we are unaware of any other system that ranges a single mobile target as
the basis for estimating the inter-node distances in support of localization. Once
the approach outlined herein has been used to estimate inter-node ranges, any of
133

the techniques for range-based localization described in this section can be used to
tranform the inter-node ranges into a coordinate system.
7.3 Range Estimation
Our approach requires that sensor nodes be able to determine the distance to a tar-
get. Fortunately, a variety of products and technologies exist which perform exactly
this function. In [63], the design of an acoustic rangefinder is presented. Commercial
ultrasonic rangefinders suitable for our purposes are available from several sources.
These rangefinders estimate range using the round-trip-time consisting of an ultra-
sonic pulse and its echo. Inexpensive and low-power pulse echo or pulse Doppler radar
rangefinders can be purchased or licensed from several sources. Laser rangefinders are
popular and available from a variety of photography suppliers. Inexpensive infrared
triangulation rangefinders can be built using off-the-shelf light emitting diodes and
position sensitive devices.
In addition to these direct rangefinding devices, sensors may be able to measure
the energy dissipated from a target by viewing the target as an isotropically-decaying
point source of energy. This approach is similar to measuring the RSSI and using
that measurement to estimate distance. However, like RSSI, energy fields may be
subject to many nuisance parameters and may experience a variety of environmental
effects, making their use less desirable.
7.4 Distance Estimation
Given a range sensor that can continuously determine the distance between a
node and target6, we now address the question of combining the range time series
6When the target is in range of the sensor
134

from neighboring nodes into a single estimate, d, of the distance separating the two
nodes. We assume the existence of a time synchronization service that establishes a
common timebase between nodes.
We consider two general cases of target trajectories in computing d: the target
crosses the line segment connecting a pair of nodes or the target does not, as shown
in Figures 7.1 and 7.2, respectively.
r 2,2
x
r 2,1
r 1,2
r 1,1
N 1 N 2 d
1
2
Figure 7.1: The trajectory of a target crosses the line segment connecting the nodes.
135

r 2,2
x
r 2,1
r 1,2
r 1,1
N 1 N 2 d
1 2
Figure 7.2: The trajectory of a target does not cross the line segment connecting thenodes.
7.4.1 Case 1
As shown in Figure 7.1, the target crosses the line segment connecting the nodes.
For the scenario in which the target take a generalized trajectory, Section 7.4.1 de-
scribes a method to compute d. While the general solution always holds, its complex-
ity can be improved for scenarios in which the target maintains a linear trajectory,
as described in Section 7.4.1.
General Trajectory
Let us denote r1(t) and r2(t) as the distance at time t of the target from nodes
N1 and N2, respectively. Consider a function r+(t) such that
r+(t) = r1(t) + r2(t) (7.1)
136

We observe the minimum value of r+(t) occurs at the time, td, the target is crossing
the line segment N1N2 and that
d = r+(t = td). (7.2)
If r+(t) is monotonic, this computation requires O(lg n) operations using a binary
search for td where n is the number of discrete samples of r+(t) over the interval of
interest. If, however, r+(t) is not monotonic, then there may be many local minima,
increasing the algorithm’s complexity to O(n). Note that for a linear trajectory,
the time and message complexity remains O(lg n), assuming no optimizations. We
observe that for a linear trajectory, the approach outlined in Section7.4.1 is possible
with constant complexity.
Linear Trajectory
The problem is to find d, the length of the line segment connecting N1 and N2,
given r1,1, r1,2, r2,1, and r2,2. Let θ1 be the angle enclosed by x and r1,2 and θ2 be the
angle enclosed by x and r2,1. We can solve for d by applying the law of cosines
d =√
r21,1 + r2
2,1 − 2r1,1r2,1 cos(π/2 + θ2) (7.3)
and after substitution and simplification, we have
d =√
r21,1 + r2
2,1 + 2r1,1r2,2 (7.4)
and its dual
d =√
r22,2 + r2
1,2 + 2r1,1r2,2 (7.5)
In the special case where the target’s trajectory, x, is perpendicular to and crosses
the line segment N1N2, we have r1,1 = r1,2 and r2,1 = r2,2. After substitution and
137

simplification, we have
d = r1,1 + r2,1 (7.6)
and its dual
d = r2,2 + r1,2 (7.7)
which is the expected result.
The complexity of this computation is constant but the distance estimates that
result from this computation may be poor if the target’s motion is non-linear in the
sensor’s field of view.
7.4.2 Case 2
In Figure 7.2, the target does not cross the line segment connecting the nodes.
For the scenario in which the target takes a general trajectory but crosses the line
connecting points N1N2 within range of both sensors, Section 7.4.2 describes a method
to compute d. For the scenario in which the target maintains a linear trajectory,
Section 7.4.2 describes an efficient method to compute d.
General Trajectory
As before, let us denote r1(t) and r2(t) as the distance at time t of the target from
nodes N1 and N2, respectively. Consider a function r−(t) such that
r−(t) = |r1(t)− r2(t)| (7.8)
We observe the maximum value of r−(t) occurs at the time, td, the target is
crossing the line that passes through the points N1 and N2 and that
d = r−(t = td) (7.9)
138

As in the case of r+(t), if r−(t) is monotonic, this computation requires O(lg n)
operations using a binary search to find td where n is the number of discrete samples of
r−(t) over the interval of interest. Once again, we observe that for a linear trajectory,
the approach outlined in Section7.4.2 is possible with constant complexity.
Linear Trajectory
The problem, once again, is to find d, the length of the line segment connecting
N1 and N2, given r1,1, r1,2, r2,1, and r2,2. We call the value of d computed using this
configuration dL. As before, θ1 is the angle enclosed by x and r1,2 and θ2 is the angle
enclosed by x and r2,1, giving
d =√
r21,1 + r2
2,1 − 2r1,1r2,2 (7.10)
and its dual
d =√
r22,2 + r2
1,2 − 2r1,1r2,2 (7.11)
In the special case where the target’s trajectory, x, is perpendicular to and crosses
the line passing through N1N2 but does not cross the line segment, N1N2, we again
have r1,1 = r1,2 and r2,1 = r2,2, giving
d = |r1,1 − r2,1| (7.12)
and its dual
d = |r2,2 − r1,2| (7.13)
which is the expected result.
Finally, in the special case where the target’s trajectory, x, is parallel to the line
passing through N1N2, we have r1,1 = r2,2 and r1,2 = r2,1, giving
d =√
r22,1 − r2
1,1 (7.14)
139

and its dual
d =√
r21,2 − r2
2,2 (7.15)
which is usual the Pythagorean result.
7.4.3 Ambiguities and Assumptions
The two general cases of target trajectories outlined in Sections 7.4.1 and 7.4.2
(where the target either crosses the line segment connecting a pair of nodes or the
target does not), are in general indistinguishable from each other since for any tra-
jectory, a node N whose position is on one side of the trajectory line has an image,
N ′, situated at the reflection of N across the trajectory line. This ambiguity leads to
two possible solutions for the distance separating a pair of nodes.
Despite the non-unique solution for any given trajectory, it is still possible to
uniquely determine the distance separating two nodes by comparing the results of
multiple distinct target trajectories. Each such trajectory will yield two possible
solutions of which only one is the true distance. The other solution generally will
vary for distinct trajectories. By comparing the distance estimates across multiple
distinct trajectories, it is possible to identify the true distance as the mode, or most
frequently occuring member, of this data set. However, the dataset is sparse initially
(afterall, we do want to converge to a range estimate with a reasonably small number
trajectories) and the data are noisy, precluding a search for single-valued mode in the
data set. We will address this problem further in Section 7.4.4.
Prior to proceeding, we outline our assumptions as follow: (1) the sensing radius
RS is much greater than the average separation of the nodes; (2) only a single target
140

is present in a network “neighborhood” at a given time; (3) a time synchronization
service exists that allows the sensors to maintain a common timebase.
7.4.4 Pairwise Distance Estimation Algorithm
In order to estimate the distances in Sections 7.4.1 and 7.4.2, the nodes must
exchanges information with their neighbors about their own observations. In this
section, we provide our algorithm for performing distance estimation between a pair
of nodes.
Algorithm
Whenever a node initially detects the presence of a target, it notes the time, t0,
and then begins keeping track of all subsequent range estimates to the target as long
as the target remains present. When the target finally leaves the node’s field of view,
the node again notes the time, t1. We call the node active during this detection
period spanning the time between t0 and t1. While the node is active, it also keeps
track of the shortest distance to the target it has measured, rCPA, and the time of
this measurement, tCPA. The distance rCPA denotes the closest point of approach or
CPA.
The algorithm then tests the symmetry about tCPA and the monotonicity over the
segments t0 to tCPA and tCPA to t1 of the range samples. Even if the range samples are
both symmetric and monotonic, the trajectory still may not be linear, but we assume
that the trajectory is linear. At this point, the node broadcasts a message with the
following fields: t0, t1, tCPA, and rCPA. The node also stores this information locally.
Upon receiving a message from a neighbor, q, a node, p, checks to see if it is currently
active. If so, then the node waits until it is no longer active before proceeding.
141

Linear Trajectory. If the trajectory is assumed to be linear, then at this point,
the node processes the message if the predicate, P , in Equation 7.16 is true. Other-
wise, the message is processed by the algorithm used in the general case.
P = (p.t0 ≤ q.tCPA ≤ p.t1) ∧ (q.t0 ≤ p.tCPA ≤ q.t1) (7.16)
The predicate P tests whether the sending node, q, and receiving node, p, each
observed the target at the time of the target’s closest point of approach to the other.
If the predicate is true, then node p sends a query message to node q requesting q’s
range to the target, q.p.rCPA, at the time of p’s CPA, p.tCPA. Node p also includes its
own range to the target, p.q.rCPA at time q.tCPA in this message. Node p determines
p.q.rCPA by computing i according to Equation 7.17, and then retrieving the i-th
range value collected after p.t0.
i = (q.tCPA − p.t0)fs (7.17)
Upon receiving a response from node q, node p performs the following assignments
r1,1 = p.rCPA (7.18)
r1,2 = p.q.rCPA (7.19)
r2,1 = q.p.rCPA (7.20)
r2,2 = q.rCPA (7.21)
The node computes four different values of d corresponding to the two cases
described in Section 7.4.1 as dL and Section 7.4.2 as dH , respectively, and the dual
ways of computing the value for each of these cases, dH1 , dH2 , dL1 , and dL2 . The node
then averages the dual values such that
dH = (dH1 + dH2)/2 (7.22)
142
dL = (dL1 + dL2)/2 (7.23)
By averaging the duals, we reduce the error due to a single erroneous range estimate
since each estimate is squared in only one of the two duals.
General Trajectory. If the range samples are either non-symmetric or non-
monotonic, then the trajectory under consideration is not linear. Consequently, the
node attempts to recover the distance estimate using ahd
In the case of a general trajectory, the message complexity will increase. The
simplest and most effective method of finding the minimum sum of two sets of ranges
is to communicate a node’s entire dataset from t0 to t1. When node p finishes its data
collection, it broadcasts a request for range data in timespan [t0, t1] to its neighbors.
Upon receiving a range request, a neighbor node, q, will find any data that overlaps
with p’s dataset and return this data along with the time endpoints of the overlapping
data. Upon receiving neighbor q’s data, p will sum this with its own data and return
the minimum sum (it’s estimated range from node p to node q).
It is conceivable that nodes p and q might be able to find the minimum sum without
exchanging their entire datasets. In the case of many trajectories, this minimum
sum will occur between the closest point of approach to each node. In this case, it
would only be necessary to exchange the data in [p.tCPA, q.tCPA] between motes. For
nodes with large sensing radii, this could provide a savings in communication costs.
However, there are trajectories in which the mobile object can pass close to both
nodes, but not between them giving a non-optimal reading.
One approach to reducing message complexity is to use a binary search over the
sample space. For such an approach, node p sends a sample of its data to q, after
which the nodes use a gradient descent method to find the the minimum sum. This
143

method, like nearly all gradient descent methods, is susceptible to local minima. As
the data indicate in Figure 7.9, this concern is not merely academic. Regardless, for
cases in which the dataset is large (e.g. large sampling radius or high frequency), a
binary search method may be appropriate.
Computing the Most Likely Estimate. Each node keeps both the dH and dL
values that are estimated in each round in a circular buffer. For any particular target
trajectory, only one of these values will yield the actual separation between the nodes
while the other value generally will vary for distinct trajectories. Consequently, about
50% of our estimates will tend to cluster around the true value of d while the other
50% will be incorrect. The distribution may be symmetric, right-tailed, or left-tailed,
depending on the target trajectories.
Our problem, then, is to find the mode of this data set. Unfortunately, since the
data are noisy, the mode is not single valued. One method of computing the mode of
such data was proposed in [64]. We adopt the median as an estimator of the mode,
since we expect 50% of the data to be clustered around the true distance. Therefore,
with each new set of estimates, the node computes the median, d, and uses this value
as the estimate d = d. We do note that a more robust estimator might be one that
estimates the mode as
mode = 2×median−mean (7.24)
7.5 Implementation
In order to characterize the performance of our algorithms, we ran several simu-
lations in Matlab and validated our simulations with empirical test cases.
144

7.5.1 Network Nodes
The Mica2Dot mote, a member of the Mica family of motes developed at U.C.
Berkeley [41], served as our network node. The Mica2Dot offers an Atmel processor
clocked at 4MHz with 4KB of random access memory, 128KB of FLASH program
memory, and 512KB of EEPROM memory. The motes run the TinyOS operating
system [42], and are programmed using the NesC language [43]. Our nodes are shown
in Figure 7.3.
Figure 7.3: Our experimental hardware consists of Mica2Dot motes (center), andclockwise from the top: rechargeable battery with top-mounted power adapter board,recharger contact board, HoneyDot magnetometer (unused in this experiment), ul-trasonic transceiver board, and the complete sensor node including an inverted conefor reflecting the ultrasonic signal omnidirectionally.
145
7.5.2 Ultrasound Transceiver
We used an ultrasound transceiver board to simulate ranging data from the mobile
mote to the network nodes, as shown in Figure 7.3. The mobile object carried an
ultrasound transmitter that issued ultrasound “chirps” every 250ms, where each chirp
consists of a radio message and ultrasound tone at 25kHz. While it is certainly unlikely
that a target travelling through a sensor network will be equipped with an ultrasound
transmitter, ultrasound provided a convenient platform with which to find ranging
information to the mobile object without having specific information on the position
of the mobile object. Each network node used an ultrasound receiver to measure the
time difference of arrival (TDOA) between the radio message and ultrasound beep.
In order to obtain accurate ranging data, we ran calibration tests on each node,
placing the transmitter at 10cm increments from the receiving node. The median of
each data set is shown in Figure 7.4. A simple line fit provides the two parameters
needed to calibrate future data. Using this same data, we subtracted out the median
value from each data set to measure the noise from the ultrasound transceiver. This
noise was found to be surprisingly uniform over a ±5 cm range as shown in Figure 7.5.
The target trajectories are shown in Figure 7.6.
7.5.3 Experimental Setup
Our experimental testbed is shown in Figure 7.7. The setup consists of four
Mica2Dot motes placed in a rectangle with sides of length 70cm and 90cm. There
are four test trajectories: A, B, C, and D. A is diagonal red-colored straight line
trajectory that separates the testbed into two halves with nodes 1 and 3 on one side
and nodes 2 and 4 on the other side. B is straight line trajectory that separates the
146

0 200 400 600−50
0
50Node 1 Calibration Data (Data − Median)
Sample Number
Mea
sure
d D
ista
nce
(mm
)
0 200 400 600 800−50
0
50Node 2 Calibration Data (Data − Median)
Sample Number
Mea
sure
d D
ista
nce
(mm
)0 500 1000
−50
0
50Node 3 Calibration Data (Data − Median)
Sample Number
Mea
sure
d D
ista
nce
(mm
)
0 500 1000−50
0
50Node 4 Calibration Data (Data − Median)
Sample NumberM
easu
red
Dis
tanc
e (m
m)
Figure 7.4: Temporal variation of the range error over time.
testbed into two halves with nodes 1 and 2 on one side and nodes 3 and 4 on the other
side. C is a curved blue-dotted trajectory that starts near node 1 and weaves between
nodes 1 and 2, then between nodes 1 and 3, then between nodes 3 and 4, then again
between nodes 1 and 4, and finally between nodes 4 and 2. D is a curved yellow-dotted
trajectory that starts near node 1 and follows the edge of the field toward node 3,
then turns a corner and continues toward node 4. In this setup, the target was moved
manually, although we hope to use autonomous or remote controlled robots in the
future for this task.
147

−60 −20 20 60 0
20
40
60
80
100
120
140Node 1 Error Distribution
Distance (mm)−60 −20 20 60
0
50
100
150
200Node 2 Error Distribution
Distance (mm)
−60 −20 20 60 0
50
100
150
200
250Node 3 Error Distribution
Distance (mm)−60 −20 20 60
0
50
100
150
200
250Node 4 Error Distribution
Distance (mm)
Figure 7.5: The range error distribution for our four nodes. More than 99% of themeasurements fall within ± 6cm of the true distance.
7.6 Results
We present the results of our experiments in this section. Figure 7.8 shows the
measured range from each of the four nodes to the target over the observation window
of interest for trajectory C.
In Figure 7.9, the sum, r+(t), is shown in red in the top half of each figure and dif-
ference, r−(t), is shown in blue in the bottom half of each figure. The black horizontal
like shows the true distance. The minimum sum and the maximum difference are our
estimators for the true distance between a pair of nodes. For the cases in which the
148

Figure 7.6: The target trajectories.
target trajectory satisfies the requirement of crossing the line N1N2, we see that the
estimates are quite close to the actual distance. The Case 1 trajectory occurs for all
node pairs except between 2 and 3. We see that in every case, the minimum value
of the top line (sum) provides a good estimate. The Case 2 trajectory occurs for all
node pairs except between 2 and 4. Again, we see that in every case, the maximum
value of the bottom line (difference) provides a good estimate of the true distance.
Table 7.1 comparises the cumulative range errors of the CPA, sum, and difference
algorithms as function of the number of passing targets. We see that both the CPA
149

Figure 7.7: Our experimental setup consists of four Mica2Dot motes: bottom left(1),top left(2), bottom right(3), and top right(4).
and sum algorithms provide only a few centimeters of error whereas the difference
error is quite large.
7.7 Summary
We have presented a novel algorithm for determining the distance between a pair of
neighboring nodes that are able to simultaneously range a target. Our approach works
by exchanging a small number of messages between such nodes and is both distributed
and scalable since all computations and communications are local. In contrast to
earlier work, our approach neither requires that the target know or communicate
its own position nor that it be cooperative in its trajectory selection. We identified
150
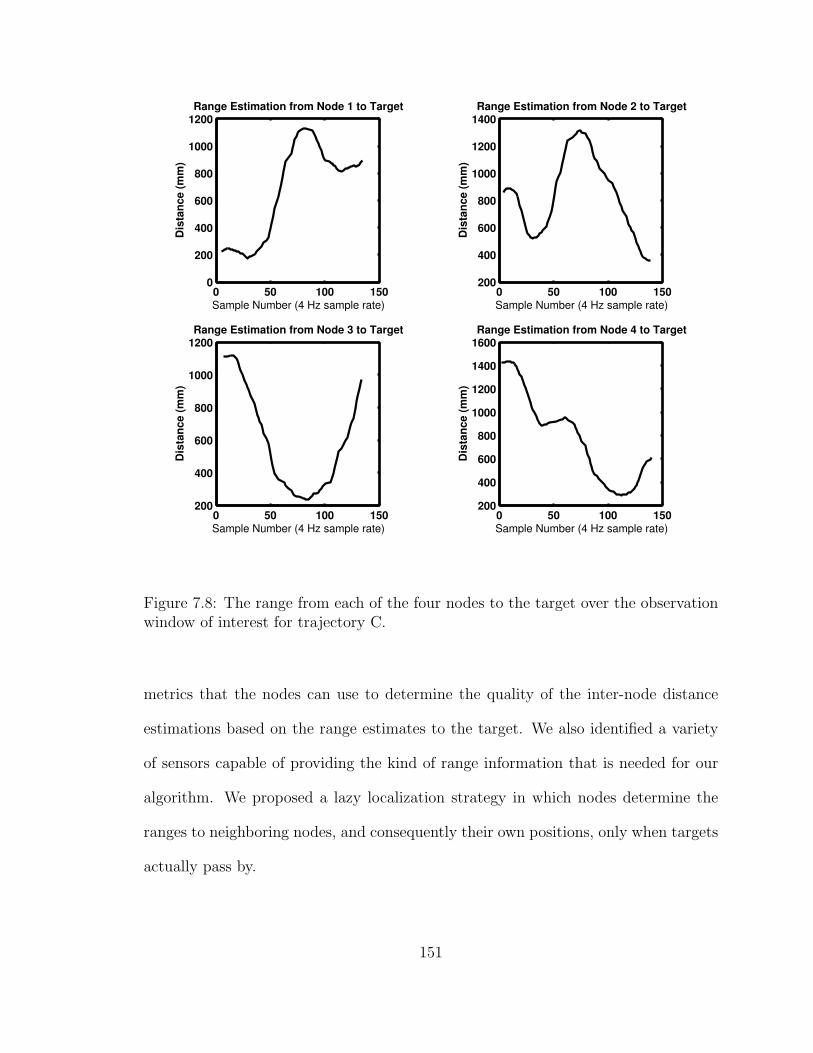
0 50 100 1500
200
400
600
800
1000
1200Range Estimation from Node 1 to Target
Sample Number (4 Hz sample rate)
Dis
tanc
e (m
m)
0 50 100 150200
400
600
800
1000
1200
1400Range Estimation from Node 2 to Target
Sample Number (4 Hz sample rate)
Dis
tanc
e (m
m)
0 50 100 150200
400
600
800
1000
1200Range Estimation from Node 3 to Target
Sample Number (4 Hz sample rate)
Dis
tanc
e (m
m)
0 50 100 150200
400
600
800
1000
1200
1400
1600Range Estimation from Node 4 to Target
Sample Number (4 Hz sample rate)
Dis
tanc
e (m
m)
Figure 7.8: The range from each of the four nodes to the target over the observationwindow of interest for trajectory C.
metrics that the nodes can use to determine the quality of the inter-node distance
estimations based on the range estimates to the target. We also identified a variety
of sensors capable of providing the kind of range information that is needed for our
algorithm. We proposed a lazy localization strategy in which nodes determine the
ranges to neighboring nodes, and consequently their own positions, only when targets
actually pass by.
151
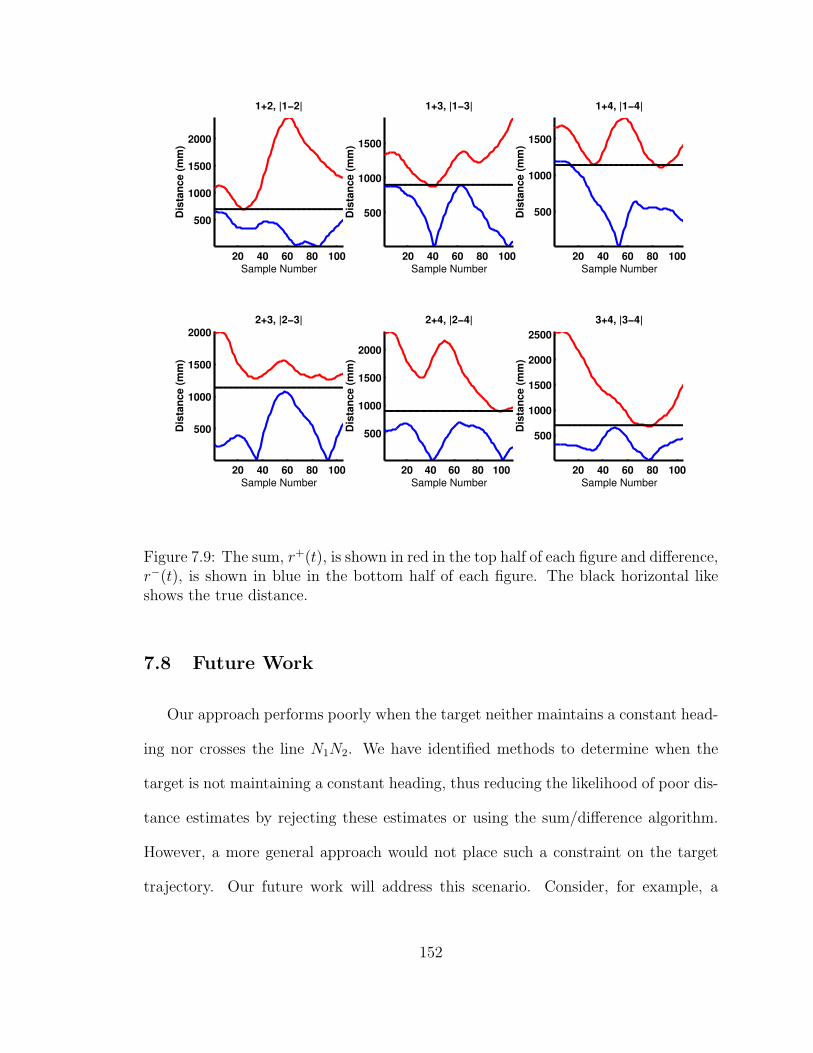
20 40 60 80 100
500
1000
1500
2000
1+2, |1−2|
Sample Number
Dis
tanc
e (m
m)
20 40 60 80 100
500
1000
1500
1+3, |1−3|
Sample Number
Dis
tanc
e (m
m)
20 40 60 80 100
500
1000
1500
1+4, |1−4|
Sample Number
Dis
tanc
e (m
m)
20 40 60 80 100
500
1000
1500
20002+3, |2−3|
Sample Number
Dis
tanc
e (m
m)
20 40 60 80 100
500
1000
1500
2000
2+4, |2−4|
Sample Number
Dis
tanc
e (m
m)
20 40 60 80 100
500
1000
1500
2000
25003+4, |3−4|
Sample Number
Dis
tanc
e (m
m)
Figure 7.9: The sum, r+(t), is shown in red in the top half of each figure and difference,r−(t), is shown in blue in the bottom half of each figure. The black horizontal likeshows the true distance.
7.8 Future Work
Our approach performs poorly when the target neither maintains a constant head-
ing nor crosses the line N1N2. We have identified methods to determine when the
target is not maintaining a constant heading, thus reducing the likelihood of poor dis-
tance estimates by rejecting these estimates or using the sum/difference algorithm.
However, a more general approach would not place such a constraint on the target
trajectory. Our future work will address this scenario. Consider, for example, a
152

Run 1 Run 2 Run 3 Run 4
CPA Error 7cm 11cm 11cm 6cmSum Error 9cm 16cm 4cm 7cmDifference Error 34cm 31cm 20cm 14cm
Table 7.1: A comparison of the cumulative range errors of the CPA, sum, and differ-ence algorithms as function of the number of passing targets.
configuration that allows three independent sensor nodes to range the same target
simultaneously at three distinct points in time, as shown in Figure 7.10.
r 1,3
r 2,3
r 3,3
r 1,1 r 2,1
r 3,1
r 1,2
r 3,2
r 2,2
N 1
N 2 N 3
t 1
t 2
t 3
Trajectory of mobile object
Figure 7.10: The trajectory of a target (yellow dot) and its distance rn,t from threesensor nodes at three points in time, where n is one of N1, N2, and N3, and t is oneof t1, t2, and t3.
The positions of the three nodes N1, N2, and N3 are unknown and we refer to these
nodes as the unknown nodes. Each of these unknown nodes is able to determine the
153

distance to the target at three distinct times t1, t2, and t3. Let us define the range
graph as the planar geometric structure whose six vertices are defined by the location
of three unknown nodes N1, N2, and N3, and of a target at three times t1, t2, and t3,
and whose edges are the nine ranges ri,j. We have proven that the range graph is both
rigid and unique if neither the three nodes nor the three points of the trajectory are
collinear. Solving the resulting quadratically constrained optimization problem will
yield the positions of the three nodes and position of the target at the three times.
154

CHAPTER 8
CONCLUSIONS
This thesis reports on our experiences in performing event detection with wireless
sensor networks. We first presented the key differences between data collection and
event detection, noting, for example their very different energy usage profiles. Our
key observation was that the detection of random events is a fundamentally different
problem from the periodic collection of data and that these differences give rise to
a rich space of tradeoffs and a multitude of opportunities for energy savings. For
example, data collection may allow sensor nodes to sleep most of the time but event
detection requires that sensors be actively or passively vigilant most of the time. On
the other hand, data collection may require frequent messaging to report measure-
ments but event detection may only require reporting when an event actually occurs.
In the case of sensing, data collection is more miserly with energy but in the case of
messaging, event detection may be more miserly with energy. Based on these obser-
vations, we proposed an extreme architecture for random event detection – one that
advocates an entirely event-driven approach.
Using energy as the critical metric, we then presented the design of the eXtreme
Scale Mote (XSM), a novel sensor network platform that includes capabilities for pas-
sive vigilance (low-power wakeup sensing) and recoverability (grenade timer). This
155

new platform extends the event-driven model into sensing by adding an interrupt in-
terface to sensors. We then demonstrated the essential elements of detection and clas-
sification, common to many intrusion detections systems, for ferromagnetic targets.
We noted the challenges of using high-power, low-latency sensors in conjunction with
low-power, high-latency analog signal conditioning circuits and presented the design
of a multi-phase clocked sample-and-hold control circuit for addressing this problem
in the general case. Our design makes it possible to use such sensors for low-power
passive vigilance purposes when, normally, they could not be used in such a manner.
As a counterpoint, we presented the platform design and signal processing algorithms
for an ultrawideband radar sensor. We demonstrated low-complexity algorithms for
signal detection and pattern classification but we did not find the radar sensors well
suited for low-power wakeup purposes due to their high-latency startup calibration
process.
We then extended the event-driven model into the middleware, advocating reac-
tive or post facto protocols for time synchronization, localization, and routing. The
observation that led us in this direction was that when the frequency of random events
is much lower than the peer-to-peer middleware messaging rate, stale state, particu-
larly for protocols like time synchronization and routing, is maintained unnecessarily.
By updating state reactively or post facto, significant energy can be saved and in-
stead used to extend system lifetime. We presented the design of an event-driven
time synchronization algorithm and the both the design and implementation of a re-
active localization algorithm. We admit that our ideas may be difficult to implement
broadly without realizing some technical advances in low-power wakeup sensors and
wakeup radios.
156

We also learned a number of key lessons during the development of the systems
presented in this thesis, as outlined below.
System-building: We took the view that ultimately diverse sensors, algorithms,
platforms, radios, batteries, and other components must be assembled into cohesive
integrated systems to provide value, and that the process of actually building these
systems would teach us a great deal. System-building does come at a very high
cost – both in time and money. For example, the specification, design, prototyping,
evaluation, redesign, and reevaluation of the XSM has already taken more than nine
months and is still continuing. The design effort primarily involved two different in-
stitutions and the evaluation effort involved another half-dozen. Navigating through
the complexities of such distributed teams is especially challenging. And still fur-
ther compounding our difficulties is the special nature of the electronic components
marketplace – allocations, lead times, second sources, and so on. Bringing up a new
platform is expensive and we advocate avoiding this process unless a quantum leap
in features or performance is both needed and unavailable through other avenues.
Noise: Noise is typically modeled as a normally distributed random variable
and samples of this variable are assumed independent and identically distributed
(uncorrelated). Our experience demonstrates that this model frequently fails to holds
in the harsh realities of the great outdoors. We find that noise tends to be wider-
tailed and more correlated than Gaussian and that clutter caused by real objects not
of interest to us is quite prevalent. Correlated noise and clutter can result in false
alarm rates. For example, air thermals can cause false alarms on our passive infrared
sensors, requiring us to extract additional features for distinguish signals from noise.
Since the root cause of the non-Gaussian nature of the noise is unknown, we are forced
157

to deal with the problem in signal processing, where signals are routinely clipped and
filtered to eliminate spikes and lower the false alarm rate. However, we still find
it difficult to differentiate between signals and clutter noise. In such scenarios, a
distributed algorithm is useful since even though the noise is correlated in time at a
point in space, it is unlikely correlated in space at a point in time. By averaging across
space-time, we are able reduce the probability of false alarm. For even greater noise
rejection, we could introduce additional orthogonal sensing modes allowing diversity
in space, time, and signal.
Signal Processing: As a direct consequence of the harshness of the real-world
noise model and the impossibility of attending to individual sensors at scales ap-
proaching 10,000 nodes, the signal processing algorithms must be robust and adaptive.
At the same times, the algorithms are constrained by limited memory, computational
resources, and communications bandwidth. Achieving the desired receiver operating
characteristic (ROC) curve in the face of such system-wide constraints is difficult
and time-consuming. Consequently, we warn future systems designers to be wary
of approaches that trivialize the sensing and signal processing aspects of these net-
works. An acceptable solution, we find, frequently violates desired modularity and
encapusation properties and suffers from poor reuse properties. We must discover
new methods to improve the design of signal processing algorithms for this class of
devices.
Testbeds: We discovered that the data collection aspects of our research were
both time-consuming and overhead-laden. To clarify what we mean by “time-consuming
and overhead-laden,” consider a typical day of testing for collecting two hours of field
data. First, the test site had to be reserved several days in advance since we our test
158

facility was owned by a third party. The remainder of our effort was concentrated on
the actual day of testing, as shown in Figure 8.1.
Figure 8.1: Typical schedule spanning from 9:00 A.M. to 11:30 P.M. for collecting anhour or two of sensor data.
A review of the test day schedule reveals a ten hour overhead for a medium
scale experiment. As a result, we did not test our applications in the field frequently.
159

Instead, we would schedule multi-hour tests followed by multiple days of programming
in the lab to correct errors. There were times during which we made adjustments
to our programs in-the-field because of silly programming mistakes. Other problems
were more difficult to diagnose. For example, we frequently discovered that things
did not work in the field at medium scale even though they did work it the lab at a
smaller scale. In such cases, we had to return to the lab with only the data logs we
had captured but without an efficient mechanism to verify that any particular change
would correct the problem. Consequently, we found the overhead of testing to be far
greater than a few hours – in some cases we spent entire days with no results.
We identified many problems with our testing strategy. The overhead involved in
setting up and tearing down tests was simply too great for us to do testing regularly
and we did not have sufficient visibility into the overall state of the system to analyze
and understand, in a fine-grained manner, what each element of the system was doing
at any given moment. Our tests were not meaningfully repeateable since temperature,
humidity, sunlight, rain, and other factors varied from day to day. The scalability
of our tests were limited by the overhead involved in programming nodes, deploying
and retrieving sensors, and downloading data.
To address these drawbacks to our testing strategy, we have begun construction
of a state-of-the-art automated sensor network testbed. We envision a testbed that
takes as input the program(s) to be tested, the network topology to be used, the
environmental conditions to be simulated, and the behaviors of evader and pursuer
robotic agents. The testbed would provide as output, via an out-of-band communi-
cations channel, a time-stamped history of sent and received messages, all important
state changes in every sensor node, the actual network topology that was used, the
160

timing and sequence of environmental factors, the actual trajectories and actions of
the robotic agents, and an overhead video of the entire testing session. The guiding
principle of our vision is to automate every aspect of the testbed so that experiments
are fast, informative, and repeatable. In a slight variation on this theme, we also
envision supporting Internet-based ad hoc interactive control of both the pursuer and
evader robots while the testbed collects detailed trajectory information about both.
161

CHAPTER 9
FUTURE WORK
9.1 Sensor and Platforms
A number of potential future research directions emerged during the course of
this work. We believe wakeup sensors will become standard on future sensor network
platforms because they extend the inherently more energy-efficient event-driven model
into hardware. In support of such wakeup sensors, we expect future platforms to
integrate increasingly lower-power and more programmable analog signal processing
electronics. For example, programmable differentiators, integrators, detectors, and
automatic gain control circuits may enable passive vigilance with lower false alarm
and power consumption rates than possible today. This trend may lead to dedicated
VLSI signal processors with both analog and digital interfaces. Specialized mixed-
signal circuits may provide extremely fine-grained and synchronized power control,
sampling, filtering, and triggering, all in hardware. Advances in MEMS may enable
zero-power wakeup by directly coupling mechanical energy at the resonant frequencies
of the sensors. Low-power wakeup radios will allow neighboring sensor nodes to
initiate communications even when the processor and main radio is turned off.
162

Once sensor network platforms begin supporting wakeup sensors and radios with
event-driven interfaces, entirely event-driven application approaches will emerge due
to the desire for longer system lifetimes. Communications will become predominantly
reactive rather than proactive. Time synchronization, localization, and link estima-
tion will occur ex post facto. The latency-lifetime tradeoff will incorporate hysteresis:
if there is no event activity for a prolonged period time, then the network will exhibit
a higher latency when reporting the very first event after the period of no activity.
Thereafter, the latency may be positively correlated with the amount of time that
passes before the next event arrives (i.e. latency increases if there is no activity, per-
haps with some important thresholds or in a quantized manner). However, if there is
a constant flurry of event activity, then the network maintains a constant high level
of vigilance and low latency. Dynamically varying latency in this manner supports
power management and is similar to the way adaptive biological systems work.
Future platforms will integrate energy-harvesting subsystems like solar cells. Such
capabilities will allow a sensor node to dynamically govern its own behavior based on
its assigned tasks, energy reserves, and probable future power availability. To this list,
certainly we could add neighbors’ energy reserves as well. The static inputs to such a
“power management” scheme might be the user’s desired level of system performance,
false alarm rate, latency, active vs passive vigilance (or something in between – do the
“best” given the available power reserves or expected future power availability). In
addition, the user might suggest multiple thresholds or ranges of system performance:
ideal, acceptable, minimum. If the node’s performance drops below minimum it
should just go to sleep or increase its vigilance to achieve this level of performance even
163

if it means a premature death. Such a dynamic approach will enable sensor networks
to provide continuous best efforts performance and significantly longer lifetimes.
9.2 Ultrawideband Technologies
Ultrawideband (UWB) technologies will become inexpensive and broadly available
as these technologies become integrated into mainstream applications like wireless net-
working and vehicle collision avoidance. Such applications will drive this technology
toward low-power chip-scale solutions. Researchers, concurrently, will demonstrate
experimental radar-enabled sensor networks with the potential to address key sens-
ing, classification, tracking, time synchronization, localization, and communications
challenges for a variety of security applications including detection, classification, and
tracking. In the future, UWB-enabled sensor networks will determine the range, ve-
locity, tomographic features, and cross-sectional areas of targets from 50m away, syn-
chronize network time on pico-second scales, estimate ranges to neighboring nodes at
sub-centimeter accuracies, and communicate at megabit-rates. UWB radar-enabled
sensor networks will provide this new level of functionality and performance at mil-
liwatt power levels, with low probability of detect or intercept, and with modest
algorithmic space, time, and message complexity.
9.3 Tool Support for Signal Processing
Designing appropriate signal processing algorithms consumed a significant amount
of our time. There are four factors which contributed to making this task so diffi-
cult. First, data collection is itself quite time-consuming. Second, the physical world
164

exhibits great variability which causes noise and clutter that is difficult to discrimi-
nate from signals of interest. The decision boundary is particularly difficult when the
probabilities of detection and false alarm are constrained. Third, the limited energy
reserves of many sensor network nodes preclude classical signal processing algorithms
which have high space, time, or message cost. Fourth, signal processing is itself a com-
plex topic which is made even more difficult when saddled with the highly-coupled
system-wide constraints encountered in sensor networks.
Novel signal processing algorithm and tools will be developed as sensor networks
are increasingly used to monitor random phenomena. Future research might focus
on automating the analysis, system identification, and automated code generation of
signal processing chains. Users would upload long time series of data into these tools
and would specify available power budget and the energy cost of various operations.
The tools would then, perhaps using some user supplied hints, automatically cluster
the data based a set of statistics. Relevant clusters of the data would be labeled
appropriately by the user and the tool would automatically generate software algo-
rithms to identify the presence of this data. The algorithms would be constrained
by the available memory, processing power, and communications ability of the sensor
nodes.
9.4 Applications
Many non-military event detection applications will emerge in the future. Re-
searchers are investigating applications of wireless sensor networks for traffic surveil-
lance, structural health monitoring, and distributed earthquake monitoring. Traffic
surveillance, in particular, represents a rich class of sensor network applications with
165
enormous potential benefits for society. Novel approaches based on a distributed
computing model that performs in situ information processing, aggregation, and ex-
filtration is promising. A distributed approach to traffic surveillance could improve
travel time estimation, allow rapid incident detection, and provide typical traffic pa-
rameters including flow, speed, and density.
The instrumentation of the traffic facility with a network of sensors is not a new
concept. Most metropolitan areas have sophisticated traffic management systems for
monitoring the roadways. However, today’s systems distribute the data collection
function throughout the facility, but perform highly centralized data processing. As
a result, these systems produce and transmit enormous volumes of data, frequently
over expensive communication channels. Much of the data that are transmitted are
used to perform near-real-time computations to obtain salient and actionable traffic
management data, but the data are then discarded. Sensor networks will allow this
processing to take place within the network, and only interesting event data will be
forwarded to the traffic management center.
Reliably determining whether the traffic state is free flowing or congested is consid-
ered the most important function of a traffic surveillance system but this requirement
is difficult to implement with today’s prevailing detector technologies that only mon-
itor the traffic state at sparse points along the roadway. Since traffic incidents can
occur at any point on the roadway, but can only be detected with today’s sparsely
distributed sensors, incidents may go unnoticed for long periods of time. Incident de-
tection is also possible by monitoring backward- and forward-moving “shockwaves”
that radiate from congested regions but the backward-moving shockwaves generated
by a queue move at a fraction of the free flow speed possibly causing critical minutes
166

to elapse between the time that an incident occurs and when it is detected. Down-
stream or forward-moving shockwaves travel more quickly but they are less reliable
than upstream shockwaves as indicators of congestion.
Wireless sensor networks can be applied to the problem of determining whether
the traffic facility is free flowing or congested. By aggregating traffic flow in a fine-
grained and highly-distributed manner across all lanes, including any egress or ingress
lanes, we may be able to accurately identify traffic state changes in near real-time. A
densely distributed sensor network can determine the traffic state and detect traffic
incidents faster than today’s approaches due to the finer granularity with which sensor
networks can monitor the traffic facility.
We envision a traffic surveillance model in which vehicle trajectory data are pro-
cessed locally in a dense network of sensors and shared with neighboring sensors
that are upstream, downstream, and in adjacent lanes. Our motivation comes from
the apparent spatial- and temporal-locality of traffic state perturbations, suggesting
a distributed approach that allows individual sensor nodes, or clusters of nodes, to
perform localized processing, filtering, and triggering functions. Collaborative signal
processing may enable more complex data sampling, aggregation, and compression
than is possible with an individual node.
A distributed traffic surveillance system could provide significant benefits over ex-
isting systems. By distributing the computing throughout the traffic facility, we can
increase local processing and aggregation while simultaneously reducing the need the
to transmit enormous volumes of information that quickly are discarded. A densely
distributed network of sensors also enables much faster, and more local, congestion
detection than is possible today enabling us to improve travel time estimation, allow
167

rapid incident detection, and provide typical traffic parameters including flow, speed,
and density. Ultimately, by instrumenting the traffic facility and dynamically rerout-
ing traffic, we may be able to significantly reduce travel delay and lower the cost of
traffic congestion which resulted in a $67 billion burden on the U.S. economy in 2000
[65].
The high capital and operating expenses associated with current traffic surveil-
lance technologies, especially when compared to the limited value they provide, gives
us an economic incentive to develop sensor networks for traffic surveillance.
168

APPENDIX A
ELECTRICAL SCHEMATICS
169
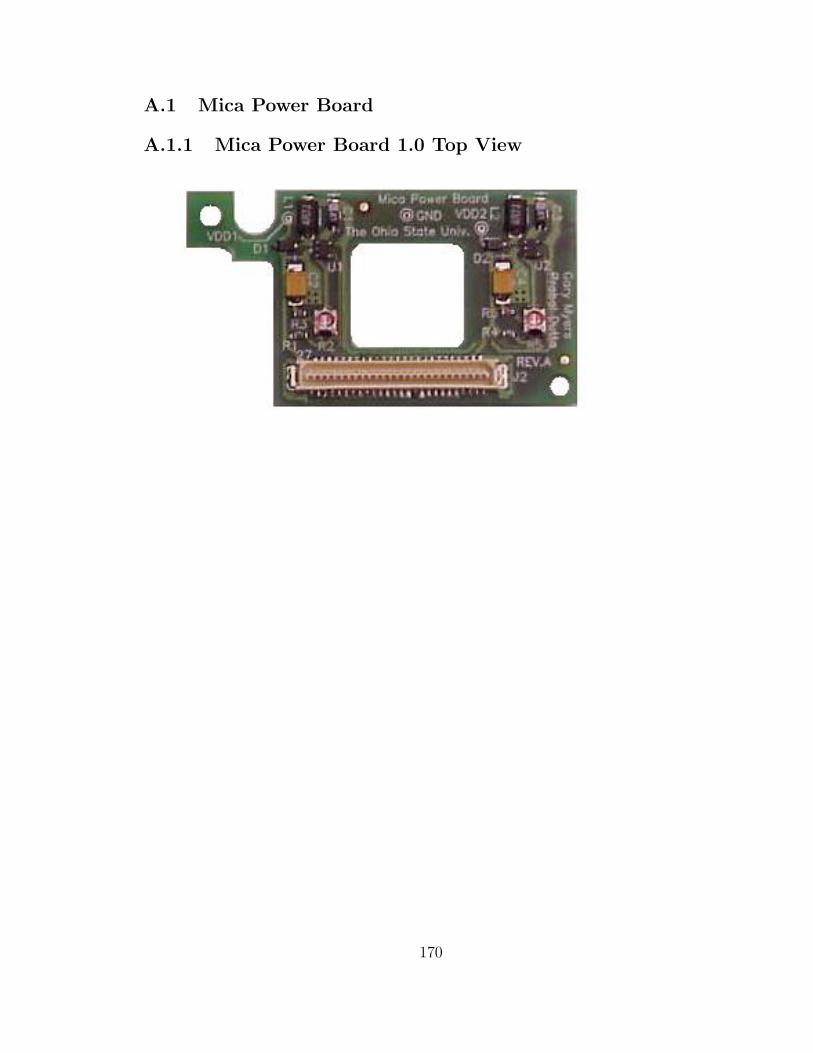
A.1 Mica Power Board
A.1.1 Mica Power Board 1.0 Top View
170

A.1.2 Mica Power Board 1.0 Schematic
5 5
4 4
3 3
2 2
1 1
DD
CC
BB
AA
AD
C7
VD
D2
PW
M1B
AD
C5
FLA
SH
_CLK
Littl
e_G
uy_S
PI_
Clo
ck
PW
2
AD
C2
INT0
INT1
AC
-
INT2
Littl
e_G
uy_R
eset
FLA
SH
SO
LED
2
INT3
VD
D1
RES
ET
PW
3
FLA
SH
SI
PW
7
gnd_
anal
og
PW
4
Littl
e_G
uy_M
ISO
DC
_BO
OS
T_S
HU
TDO
WN
PW
5
AD
C3
AD
C4
PW
0
I2C
_BU
S_1
_CLK
ALERD
PW
1
LED
1
PW
M0
PR
OG
_MO
SI_
SPI
PW
6LE
D3
Littl
e_G
uy_M
OS
I
AC
+
I2C
_BU
S_1
_DAT
A
WR
AD
C6
AD
C1
AD
C0_
BB
Out
Vcc
PW
0
VD
D1
VD
D2
Vcc
PW
1
PW
4P
W5
PW
0
Littl
e_G
uy_M
ISO
PW
2P
W1
Littl
e_G
uy_M
OS
I
UAR
T_TX
D0
Littl
e_G
uy_R
eset
UA
RT_
RXD
0
PW
6
Littl
e_G
uy_S
PI_
Clo
ck
PW
3
RES
ET
Vcc
PW
M1B
AD
C6
AD
C2
AD
C4
AD
C5
AD
C3
AD
C0_
BB
Out
AD
C7
AD
C1
PW
M1A
PR
OG
_MIS
O_S
PIS
CK
_SP
I
AC
+P
WM
1A
gnd_
anal
og
LED
3
FLA
SH
_CLK
FLA
SH
SO
DC
_BO
OS
T_S
HU
TDO
WN
LED
1R
D
I2C
_BU
S_1
_CLK
INT0
PW
7
WR
AC
-
PW
M0
I2C
_BU
S_1
_DAT
A
PR
OG
_MIS
O_S
PI
INT1
INT2
ALE
PR
OG
_MO
SI_
SPI
SC
K_S
PI
VD
D_A
NA
LOG
FLA
SH
SI
LED
2
INT3
UA
RT_
RXD
0U
ART_
TXD
0
Title
Size
Doc
umen
t Num
ber
Rev
Dat
e:S
heet
of
Prab
al D
utta
, The
Ohi
o St
ate
Uni
vers
ity1
Mic
a Po
wer
Boa
rdC
11
Sat
urda
y, M
ay 0
3, 2
003
Connector(Bottom)
Connector(Top)
NOTE:TheMicaPowerBoard("MICAPB")isdesignedto
interfacewiththeMICA,MICA2,andMICASBontheBOTTOM
connector.TheVDD_ANALOGandVccareNOTconnected
straightthroughlikeinmostMICAdaughterboards.
Instead,thesesignalsarereplacedwiththeoutputsoftwo
adjustableDC-DCconverterslabeledVDD1andVDD2.
RecommendedParts:
L1,L2:MurataLQH3C4R7M24orSumidaCD43-4R7
C1,C3:AVXTAJA156M010(CASEA)
C2,C4:AVXTAJB226M006(CASEB)
D1,D2:MBR0520(SOD123)
VDD1=1.23(1+R1a/R1);
R1aistophalfofR1
VDD2=1.23(1+R2a/R2);
R2aistophalfofR2
R2,R5:PANASONICEVM-7JSX30BQ4
R3
TBD
R5
47K
D1
C3
15uF
U1
LT16
13
SW1
GND 2
SHD
N4
FB3
VIN
5
R4
TBD
HIROSESOCKET
J1 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25
5253
26
27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51
U2
LT16
13
SW1
GND 2
SHD
N4
FB3
VIN
5
R2
47K
HIROSEPLUG
J2 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25
52
53
26
27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51
C1
15uF
D2
C2
22uF
R6
TBD
R1
TBD
L1 4.7u
H
L2 4.7u
H
C4
22uF
171

A.2 XSM 1.0
172

A.2.1 XSM 1.0 Top View
173
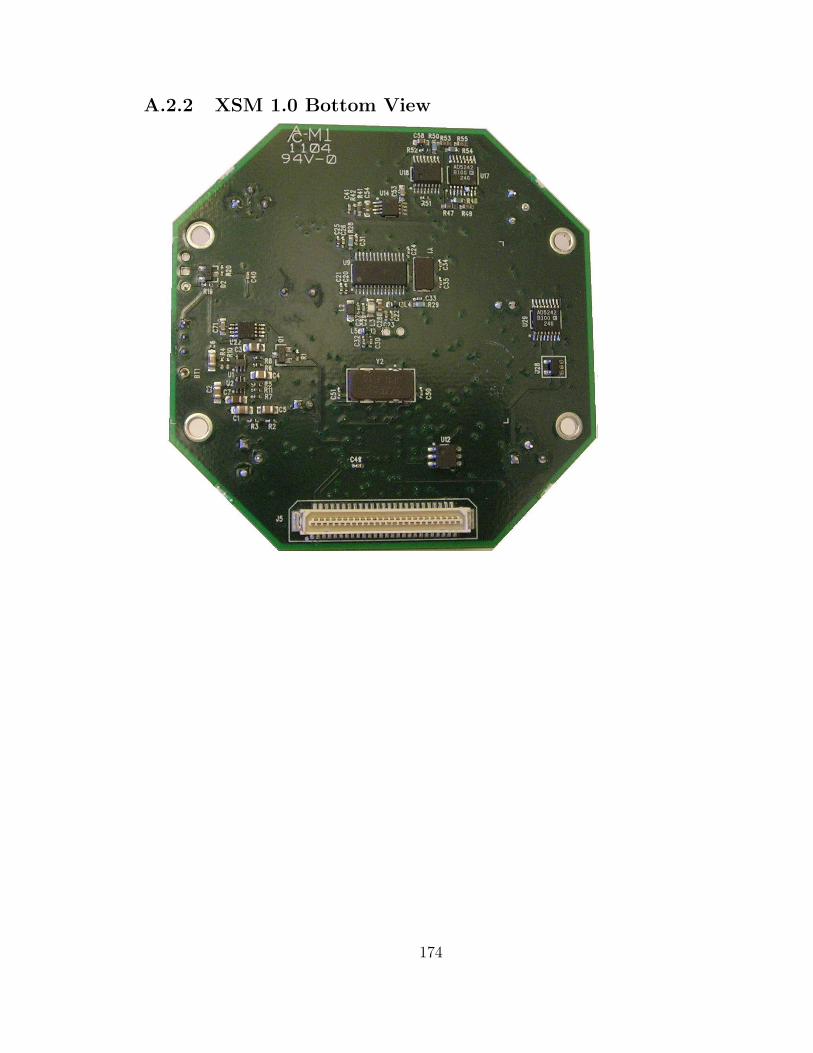
A.2.2 XSM 1.0 Bottom View
174

A.2.3 Acoustic Subsystem
5 5
4 4
3 3
2 2
1 1
DD
CC
BB
AA
MICR
OPHO
NE/S
OUNDER
6310
-033
6-01
A
XS
M10
0CA
XT
RE
ME
SC
ALE
MO
TE
Cro
ssbo
w T
echn
olog
y41
Dag
gett
Driv
eS
an J
ose,
CA
. 951
34
B1
7T
uesd
ay, F
ebru
ary
24, 2
004
X
XX/X
X/XX
2-3-
03
XX/X
X/XX
M. G
RIM
ME
R
X
M. G
RIM
ME
R2-
3-03
Titl
e
Siz
eD
ocum
ent N
umbe
rR
ev
Dat
e:S
heet
of
EX
CE
PT
AS
MA
Y B
E O
TH
ER
WIS
E P
RO
VID
ED
BY
CO
NT
RA
CT,
TH
ISD
RA
WIN
G O
R S
PE
CIF
ICA
TIO
N IS
TH
E P
RO
PR
IETA
RY
PR
OP
ER
TY O
FC
RO
SS
BO
W T
EC
HN
OLO
GY
INC
. IT
IS IS
SU
ED
IN S
TRIC
T C
ON
FID
EN
CE
AN
D S
HA
LL N
OT
BE
RE
PR
OD
UC
ED
OR
CO
PIE
D O
R U
SE
D (P
AR
TIA
LLY
OR
WH
OLL
Y)
IN A
NY
MA
NN
ER
WIT
HO
UT
PR
IOR
EX
PR
ES
S W
RIT
TEN
AU
THO
RIZ
ATI
ON
OF
CR
OS
SB
OW
TE
CH
NO
LOG
Y IN
C.
DA
TE
DW
N
CH
K
AP
RV
D
AP
RV
D
VR
EF
VR
EF
VR
EF
VS
W-
VS
W+
PW
3
PW
2
AD
C2
AU
DIO
_RX
_PW
R
AU
DIO
_RX
_PW
RA
UD
IO_R
X_P
WR
AU
DIO
_RX
_PW
RA
UD
IO_R
X_P
WR
PW
7
PW
M1B
PW
[0..7
]
PW
[0..7
]
PW
M1A
I2C
_CLK
I2C
_DA
TA
PW
[0..7
]
AC
-AD
C[0
..7]
VC
C
VC
C
VC
C
C71
0.1u
F
Q1 ZX
M61
P03
F
1
32
C9
2.2U
F
C13
2.2U
F
C2 1u
F
R5
1.10
K
Q2 ZX
M61
P03
F
1
32
R10
100K
U21
A
AD
5242
2 3 4
6789 10
1
A1
W1
B1
SD
SC
LS
DA
AD
0A
D1
O1
V+ V-
+ -
U5
LM82
612
31
5
4
+ -
V+ V-
U2
MA
X44
66
1 34
5 2
R68
100K
C10
.1uF
R11
56.0
K
C1
10uF
C6
10uF
C11
.1uF
R13
2.21
K
C8
.033
uF
R6
1.10
K
C12
2.2U
F
PZ
1 BU
ZZ
ER
1 2
U22
MA
X74
13E
UA
67
548
132
OS
SH
DN
OU
TV
+C
LK
CO
MG
ND
IN
C3
1uF
C7
0.22
uF
R2
1.10
K
C4
1uF
+ -
V+ V-
U1
MA
X44
66
1 34
5 2
Q5 ZX
M61
P03
F
1
32
U6 M
AX
864
2 4
108 91
15
16
5
12
1413
67
C2+ C2-
NC
FC
0
NC
C1-
V+
C1+
V-
IN
NC
NC
SH
DN
FC
1
R1
100K
U21
B
AD
5242
16 15 14 13125 11
A2
W2
B2
O2
VS
S
VC
C
GN
D
R3
1.10
K
C14
2.2U
F
C5
1uF
R8
5.1K
D1
SD
M10
K45
MM
1
MIC
1 2
R12
100K
R4
100K
R7
1.10
K
V+ V-
+ -
U3
LMC
7215
5
31
2
4R
910
0K
175

A.2.4 XSM 1.0 Power, Accelerometer, and LEDs
5 5
4 4
3 3
2 2
1 1
DD
CC
BB
AA
POWE
R/AC
CEL/
LEDS
6310
-033
6-01
A
XS
M10
0CA
XT
RE
ME
SC
ALE
MO
TE
Cro
ssbo
w T
echn
olog
y41
Dag
gett
Driv
eS
an J
ose,
CA
. 951
34
B2
7T
uesd
ay, F
ebru
ary
24, 2
004
X
XX/X
X/XX
2-3-
03
XX/X
X/XX
M. G
RIM
ME
R
X
M. G
RIM
ME
R2-
3-03
Titl
e
Siz
eD
ocum
ent N
umbe
rR
ev
Dat
e:S
heet
of
EX
CE
PT
AS
MA
Y B
E O
TH
ER
WIS
E P
RO
VID
ED
BY
CO
NT
RA
CT,
TH
ISD
RA
WIN
G O
R S
PE
CIF
ICA
TIO
N IS
TH
E P
RO
PR
IETA
RY
PR
OP
ER
TY O
FC
RO
SS
BO
W T
EC
HN
OLO
GY
INC
. IT
IS IS
SU
ED
IN S
TRIC
T C
ON
FID
EN
CE
AN
D S
HA
LL N
OT
BE
RE
PR
OD
UC
ED
OR
CO
PIE
D O
R U
SE
D (P
AR
TIA
LLY
OR
WH
OLL
Y)
IN A
NY
MA
NN
ER
WIT
HO
UT
PR
IOR
EX
PR
ES
S W
RIT
TEN
AU
THO
RIZ
ATI
ON
OF
CR
OS
SB
OW
TE
CH
NO
LOG
Y IN
C.
DA
TE
DW
N
CH
K
AP
RV
D
AP
RV
D
AD
C4
AD
C3
PW
4
PW
0
PW
1
INT
2
INT
3
PW
[0..7
]
AD
C[0
..7]
PW
M0
PW
M1C
PW
[0..7
]
INT
[0..3
]
VC
C
VC
C
R23
330K
C17
.1uF
R16 0
OH
M
D10
RE
D
SW
1
SP
DT
12
3
U8
AD
XL2
02A
E
1 2 3
45 67
8
ST
T2
GN
D
YO
UT
XO
UT
YF
ILT
XF
ILT
VC
C
R70
470
D6
RE
D
D11
RE
D
R22
100
R74
470
C16
.1uF
R69
470
C18
.1uF
D7
RE
D
R21
1K
R20 0
OH
M
D2 BA
T54
C
R72
470
BT1
BA
TT
ER
Y_2
AA
1
2
V-
V+
D8
RE
D
J6 HD
R 2
X 1
X .1
1 21 2
C19
.1uF
R71
470
C15
.1uF
R73
470
D9
RE
D
176

A.2.5 XSM 1.0 Radio Subsystem
5 5
4 4
3 3
2 2
1 1
DD
CC
BB
AA
50 OHM LINES
50 OHM LINES
50 OHM LIN
ES
L5 L2 L3 L4 C12
C13
C15
C17
REFDES
900 MHZ
433 MHZ
4.7NH
120NH
2.7NH
4.7NH
10PF
-- 10PF
10PF
12NH
68NH
6NH
33NH
15PF
8PF
20PF
20PF
315 MHZ
15NH
39NH
20NH
56NH
8PF
2.2PF
30PF
30PF
RADI
O
6310
-033
6-01
A
XS
M10
0CA
XT
RE
ME
SC
ALE
MO
TE
Cro
ssbo
w T
echn
olog
y41
Dag
gett
Driv
eS
an J
ose,
CA
. 951
34
B3
7T
uesd
ay, F
ebru
ary
24, 2
004
X
XX/X
X/XX
2-3-
03
XX/X
X/XX
M. G
RIM
ME
R
X
M. G
RIM
ME
R2-
3-03
Titl
e
Siz
eD
ocum
ent N
umbe
rR
ev
Dat
e:S
heet
of
EX
CE
PT
AS
MA
Y B
E O
TH
ER
WIS
E P
RO
VID
ED
BY
CO
NT
RA
CT,
TH
ISD
RA
WIN
G O
R S
PE
CIF
ICA
TIO
N IS
TH
E P
RO
PR
IETA
RY
PR
OP
ER
TY O
FC
RO
SS
BO
W T
EC
HN
OLO
GY
INC
. IT
IS IS
SU
ED
IN S
TRIC
T C
ON
FID
EN
CE
AN
D S
HA
LL N
OT
BE
RE
PR
OD
UC
ED
OR
CO
PIE
D O
R U
SE
D (P
AR
TIA
LLY
OR
WH
OLL
Y)
IN A
NY
MA
NN
ER
WIT
HO
UT
PR
IOR
EX
PR
ES
S W
RIT
TEN
AU
THO
RIZ
ATI
ON
OF
CR
OS
SB
OW
TE
CH
NO
LOG
Y IN
C.
DA
TE
DW
N
CH
K
AP
RV
D
AP
RV
D
PA
LE
PD
AT
A
DC
LK
DC
LK
SP
I_S
CK
PC
LKP
DA
TA
PA
LE
AD
C0
SP
I_M
ISO
CH
P_O
UT
AV
CC
AV
CC
VC
C
VC
C
AV
CC
VC
C
AV
CC
VC
C
L4 33nH
C31
1000
pF
C27
15pF
J3
HD
R 2
X 1
X .1
1 21 2
C32
22pF
U9
CC
1000
21
15915
3 4
10 11
12
1318 17
23 24 25 26 2728
VCC
AVCCAVCCAVCCAVCC
RF_
IN
RF
_OU
T
L1 L2
CH
P_O
UT
R_B
IAS
XO
SC
1X
OS
C2
DIO
DC
LKP
CLK
PD
AT
AP
ALE
RS
SI
C20
.033
uFC
2110
00pF
L5 10nH
R29
82.5
K
C24
220p
F
C33
4.7p
F
R25
1M
C30
22pF
C22
1000
pF
C34
13pF
Y1
14.7
456M
HZ
21
21
R26
1M
C29
4.7p
F
C25
.033
uF
C35
13pF
C28
8.0p
F
L2 68nH
R24
1M
C26
1000
pF
C23
220p
F
R28
27.4
K
L3 6.8N
H
L1
BE
AD
-080
5
R27
10K
177

A.2.6 XSM 1.0 Expansion Connector
5 5
4 4
3 3
2 2
1 1
DD
CC
BB
AA
PIN
NAME
DESCRIPTIO
N
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26
GND
VSNSR
INT3
INT2
INT1
INT0
BAT_MON
LED3
LED2
LED1
RD WR ALE
PW7
USART1_CLK
PROG_MOS
IPROG_MIS
OSPI_SCK
USART1_RXD
USART1_TXD
I2C_CLK
I2C_DATA
PWM0
PWM1A
AC+
AC-
GROUND
SENSOR SUPPLY
GPIO
GPIO
GPIO
GPIO
BATTERY VOLTAGE MONITOR ENABLE
LED3
LED2
LED1
GPIO
GPIO
GPIO
POWER CONTROL 7
USART1 CLOCK
SERIAL PROGRAM M
OSI
SERIAL PROGRAM M
ISO
SPI SERIAL CLO
CKUSART1 RX DA
TAUSART1 TX DA
TAI2C BUS CLOCK
I2C BUS DATA
GPIO/PWM
0GPIO/PWM1A
GPIO/AC+
GPIO/AC-
UART_RXD0
UART_TXD0
PW0
PW1
PW2
PW3
PW4
PW5
PW6
ADC7
ADC6
ADC5
ADC4
ADC3
ADC2
ADC1
ADC0
THERM_PWR
THRU1
THRU2
THRU3
RSTN
PWM1B
VCC
GND
NAME
27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51PIN
DESCRIPTIO
N
UART_0 RECEI
VEUART_0 TRANSMIT
POWER CONTROL 0
POWER CONTROL 1
POWER CONTROL 2
POWER CONTROL 3
POWER CONTROL 4
POWER CONTROL 5
POWER CONTROL 6
ADC INPUT 7 - BATTERY MONITOR/JTAG TDI
ADC INPUT 6 / JTAG
TDO
ADC INPUT 5 / JTAG
TMS
ADC INPUT 4 / JTAG
TCK
ADC INPUT
3ADC INPUT
2ADC INPUT
1ADC INPUT 0 / RSSI MON
ITOR
TEMP SENSOR ENABLE
THRU CONNECT
1THRU CONNECT
2THRU CONNECT3
RESET (NEG
)GPIO/PWM1B
DIGITAL SUPP
LYGROUND
PROG_MOS
IPROG_MISO
MOTE
CON
NECTOR
6310
-033
6-01
A
XS
M10
0CA
XT
RE
ME
SC
ALE
MO
TE
Cro
ssbo
w T
echn
olog
y41
Dag
gett
Driv
eS
an J
ose,
CA
. 951
34
B4
7T
uesd
ay, F
ebru
ary
24, 2
004
X
XX/X
X/XX
2-3-
03
XX/X
X/XX
M. G
RIM
ME
R
X
M. G
RIM
ME
R2-
3-03
Titl
e
Siz
eD
ocum
ent N
umbe
rR
ev
Dat
e:S
heet
of
EX
CE
PT
AS
MA
Y B
E O
TH
ER
WIS
E P
RO
VID
ED
BY
CO
NT
RA
CT,
TH
ISD
RA
WIN
G O
R S
PE
CIF
ICA
TIO
N IS
TH
E P
RO
PR
IETA
RY
PR
OP
ER
TY O
FC
RO
SS
BO
W T
EC
HN
OLO
GY
INC
. IT
IS IS
SU
ED
IN S
TRIC
T C
ON
FID
EN
CE
AN
D S
HA
LL N
OT
BE
RE
PR
OD
UC
ED
OR
CO
PIE
D O
R U
SE
D (P
AR
TIA
LLY
OR
WH
OLL
Y)
IN A
NY
MA
NN
ER
WIT
HO
UT
PR
IOR
EX
PR
ES
S W
RIT
TEN
AU
THO
RIZ
ATI
ON
OF
CR
OS
SB
OW
TE
CH
NO
LOG
Y IN
C.
DA
TE
DW
N
CH
K
AP
RV
D
AP
RV
D
UA
RT
_TX
D0
UA
RT
_RX
D0
SP
I_S
CK
RS
TN
UA
RT
_TX
D0
UA
RT
_RX
D0
VC
C
VC
C
M3
MTG
128
11
HIROSE PLUG
J5
DF
9-51
P-1
V(5
4)
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26
27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51
M4
MTG
128
11
M1
MTG
128
11
M2
MTG
128
11
178

A.2.7 XSM 1.0 Microcontroller and Memory Subsystem
5 5
4 4
3 3
2 2
1 1
DD
CC
BB
AA
CPU/
FLAS
H/SE
RIAL ID
6310
-033
6-01
A
XS
M10
0CA
XT
RE
ME
SC
ALE
MO
TE
Cro
ssbo
w T
echn
olog
y41
Dag
gett
Driv
eS
an J
ose,
CA
. 951
34
B5
7T
uesd
ay, F
ebru
ary
24, 2
004
X
XX/X
X/XX
2-3-
03
XX/X
X/XX
M. G
RIM
ME
R
X
M. G
RIM
ME
R2-
3-03
Titl
e
Siz
eD
ocum
ent N
umbe
rR
ev
Dat
e:S
heet
of
EX
CE
PT
AS
MA
Y B
E O
TH
ER
WIS
E P
RO
VID
ED
BY
CO
NT
RA
CT,
TH
ISD
RA
WIN
G O
R S
PE
CIF
ICA
TIO
N IS
TH
E P
RO
PR
IETA
RY
PR
OP
ER
TY O
FC
RO
SS
BO
W T
EC
HN
OLO
GY
INC
. IT
IS IS
SU
ED
IN S
TRIC
T C
ON
FID
EN
CE
AN
D S
HA
LL N
OT
BE
RE
PR
OD
UC
ED
OR
CO
PIE
D O
R U
SE
D (P
AR
TIA
LLY
OR
WH
OLL
Y)
IN A
NY
MA
NN
ER
WIT
HO
UT
PR
IOR
EX
PR
ES
S W
RIT
TEN
AU
THO
RIZ
ATI
ON
OF
CR
OS
SB
OW
TE
CH
NO
LOG
Y IN
C.
DA
TE
DW
N
CH
K
AP
RV
D
AP
RV
D
FLA
SH
_CS
SE
RIA
L_ID
PW
7P
W6
PW
5P
W4
PW
3P
W2
PW
1P
W0
US
AR
T1_
RX
D
SE
RIA
L_ID
US
AR
T1_
CLK
US
AR
T1_
TX
D
UA
RT
_TX
D0
US
AR
T1_
RX
D
LED
3LED
2
LED
1
FLA
SH
_CS
FLA
SH
_CS
SP
I_M
OS
IA
DC
3
AD
C5
AD
C4
AD
C0
AD
C6
AD
C2
AD
C7
AD
C1
INT
1IN
T2
INT
3
INT
0
INT
0IN
T[0
..3]
FLA
SH
_CS
US
AR
T1_
TX
DU
SA
RT
1_C
LKU
SA
RT
1_R
XD
PC
LKP
DA
TA
LED
3LE
D2
LED
1
MA
G_S
RC
HP
_OU
TT
HE
RM
_PW
RP
W[0
..7]
SP
I_S
CK
PW
M0
PW
M1A
PW
M1B
RS
TN
INT
[0..3
]
UA
RT
_RX
D0
UA
RT
_TX
D0
AC
-
AD
C[0
..7]
WR
RD
ALE
SP
I_M
ISO
I2C
_CLK
I2C
_DA
TA
US
AR
T1_
RX
DU
SA
RT
1_T
XD
PA
LEU
SA
RT
1_C
LK
AC
+
PW
M1C
VC
C
VC
C
VC
C
VC
C
VC
C
VC
C
VC
C
VS
NS
R
VC
C
VC
CV
CC
C46
1000
pF
U12 DS
2401
P
2D
Q
R33
0 O
HM
C43
.1uF
C47
1000
pF
C39
.01u
F
C44
.1uF
R36
10K
R34
1M
D4
GR
EE
N
12
R31
10K
C40
.01u
F
C51
13pF
C38
.01u
F
C45
.1uF
C73
0.1u
F
50V
10%
R32
1M
D3
RE
D
12
R38
470
Y2
7.37
28M
HZ
2 341
X2
X2
X1
X1
C36
10uF
6.3V
Y3
32.7
68K
HZ21
34
C48
1000
pF
R40
470
C37
.01u
F
U20
AT
45D
B16
1B
12 3456
7
8 9 10 11 12 13 14 151617181920212223
2425 262728
GN
DN
CN
C
CS
SC
KS
IS
O
NC
NC
NC
NC
NC
NC
NC
NC
NC
NC
NC
NC
NC
NC
NC
RD
YR
ST
WP
NC
NC
VC
C
D5
YE
LLO
W
12
C41
.01u
F
R67
10.0
K
SW
2
PB
SP
ST
12
53 4
R30
470
R37
4.7K
U10
AT
ME
GA
128L
51 50 49 48 47 46 45 44 10 11 12 13 14 15 16 1735 36 37 38 39 40 41 42
25 26 27 28 29 30 31 32 2 3 4 5 6 7 8 9 61 60 59 58 57 56 55 54
6462
1
202423
33 34 43
1819
PA
0/A
D0
PA
1/A
D1
PA
2/A
D2
PA
3/A
D3
PA
4/A
D4
PA
5/A
D5
PA
6/A
D6
PA
7/A
D7
PB
0/S
SP
B1/
SC
KP
B2/
MO
SI
PB
3/M
ISO
PB
4/O
C0
PB
5/O
C1A
PB
6/O
C1B
PB
7/O
C1C
PC
0/A
8P
C1/
A9
PC
2/A
10P
C3/
A11
PC
4/A
12P
C5/
A13
PC
6/A
14P
C7/
A15
PD
0/I2
C_C
LKP
D1/
I2C
_DA
TA
PD
2/R
XD
1P
D3/
TX
D1
PD
4/IC
1P
D5/
XC
K1
PD
6/T
1P
D7/
T2
PE
0/R
XD
0P
E1/
TX
D0
PE
2/X
CK
0P
E3/
OC
3AP
E4/
OC
3BP
E5/
OC
3CP
E6/
T3
PE
7/IC
3
PF
0/A
DC
0P
F1/
AD
C1
PF
2/A
DC
2P
F3/
AD
C3
PF
4/T
CK
PF
5/T
MS
PF
6/T
DO
PF
7/T
DI
AVCCAREF
PE
N
RSTXTAL1XTAL2
PG
0/W
RP
G1/
RD
PG
2/A
LE
PG3/TOSC2PG4/TOSC1
C49
1000
pF
U11
AT
45D
B04
1
1 2 3 458
SI
SC
KR
ST
CS
WP
SO
R35
10K
C50
13pF
C42
.01u
F
R39
470
179
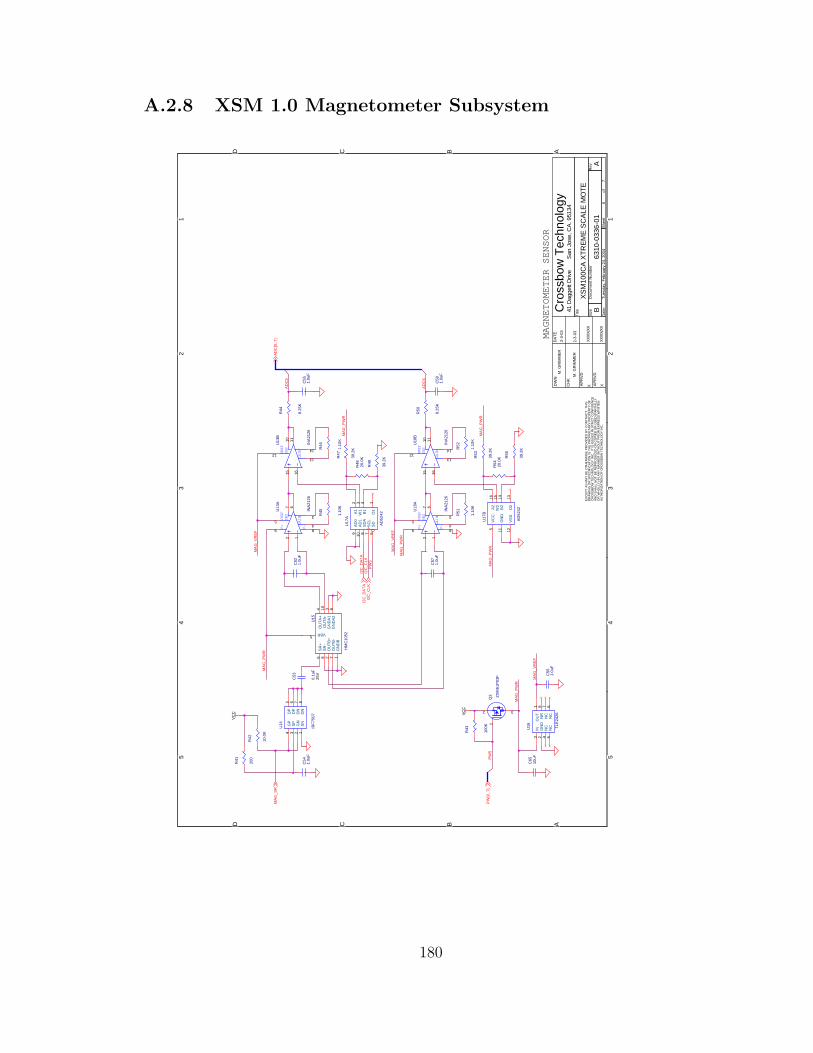
A.2.8 XSM 1.0 Magnetometer Subsystem
5 5
4 4
3 3
2 2
1 1
DD
CC
BB
AA
MAGN
ETOM
ETER
SENSOR
6310
-033
6-01
A
XS
M10
0CA
XT
RE
ME
SC
ALE
MO
TE
Cro
ssbo
w T
echn
olog
y41
Dag
gett
Driv
eS
an J
ose,
CA
. 951
34
B6
7T
uesd
ay, F
ebru
ary
24, 2
004
X
XX/X
X/XX
2-3-
03
XX/X
X/XX
M. G
RIM
ME
R
X
M. G
RIM
ME
R2-
3-03
Titl
e
Siz
eD
ocum
ent N
umbe
rR
ev
Dat
e:S
heet
of
EX
CE
PT
AS
MA
Y B
E O
TH
ER
WIS
E P
RO
VID
ED
BY
CO
NT
RA
CT,
TH
ISD
RA
WIN
G O
R S
PE
CIF
ICA
TIO
N IS
TH
E P
RO
PR
IETA
RY
PR
OP
ER
TY O
FC
RO
SS
BO
W T
EC
HN
OLO
GY
INC
. IT
IS IS
SU
ED
IN S
TRIC
T C
ON
FID
EN
CE
AN
D S
HA
LL N
OT
BE
RE
PR
OD
UC
ED
OR
CO
PIE
D O
R U
SE
D (P
AR
TIA
LLY
OR
WH
OLL
Y)
IN A
NY
MA
NN
ER
WIT
HO
UT
PR
IOR
EX
PR
ES
S W
RIT
TEN
AU
THO
RIZ
ATI
ON
OF
CR
OS
SB
OW
TE
CH
NO
LOG
Y IN
C.
DA
TE
DW
N
CH
K
AP
RV
D
AP
RV
D
MA
G_V
RE
F
MA
G_P
WR
MA
G_V
RE
F
MA
G_P
WR
MA
G_P
WR
AD
C6
AD
C5
MA
G_V
RE
F
MA
G_P
WR
MA
G_P
WR
MA
G_P
WR
PW
5I2
C_C
LKI2
C_D
AT
A
PW
5
MA
G_S
RA
DC
[0..7
]
PW
[0..7
]
I2C
_DA
TA
I2C
_CLK
VC
C VC
C
C58
1.0u
F
U15
HM
C10
52
1234
5
6 78
910
GN
DB
OU
TB
+G
ND
A1
OU
TA
+
VBR
SR
+
OU
TB
-
SR
-
GN
DA
2
OU
TA
-
U17
A
AD
5242
2 3 4
6789 10
1
A1
W1
B1
SD
SC
LS
DA
AD
0A
D1
O1
C56
1.0u
F
C55
1.0u
F
R49
39.2
K R47
39.2
K
R51
1.10
KR
53
39.2
K
C52
1.0u
F
R43
100K
GAINSNS
VREF
U13
B
INA
2126
15 16
13
14
1110
12
U16 TLE
2426
123 4 5
678O
UT
GN
DIN N
CN
CN
CN
CN
R
GAIN
V+ V-
SNS
VREF
U18
A
INA
2126
2 1
4
3
9 8
67
5
R52
1.10
K
U14
IRF
7507
12345 6 7 8
SN
GN
SP
GP
DP
DP
DN
DN
R44
8.25
K
U17
B
AD
5242
16 15 14 13125 11
A2
W2
B2
O2
VS
S
VC
C
GN
D
R41
200
C53
0.1u
F25
V
C57
1.0u
F
R55
39.2
K
C54
1.0u
F
R50
8.25
K
R48 20.0
K
Q3 ZX
M61
P03
F
1
32
R45
1.10
K
GAIN
V+ V-
SNS
VREF
U13
A
INA
2126
2 1
4
3
9 8
67
5C
6510
uF
GAINSNS
VREF
U18
B
INA
2126
15 16
13
14
1110
12
R54 20.0
K
R46
1.10
K
R42
10.0
K
180

A.2.9 XSM 1.0 Passive Infrared Subsystem
5 5
4 4
3 3
2 2
1 1
DD
CC
BB
AA
PIR
SENS
OR
6310
-033
6-01
A
XS
M10
0CA
XT
RE
ME
SC
ALE
MO
TE
Cro
ssbo
w T
echn
olog
y41
Dag
gett
Driv
eS
an J
ose,
CA
. 951
34
B7
7T
uesd
ay, F
ebru
ary
24, 2
004
X
XX/X
X/XX
2-3-
03
XX/X
X/XX
M. G
RIM
ME
R
X
M. G
RIM
ME
R2-
3-03
Titl
e
Siz
eD
ocum
ent N
umbe
rR
ev
Dat
e:S
heet
of
EX
CE
PT
AS
MA
Y B
E O
TH
ER
WIS
E P
RO
VID
ED
BY
CO
NT
RA
CT,
TH
ISD
RA
WIN
G O
R S
PE
CIF
ICA
TIO
N IS
TH
E P
RO
PR
IETA
RY
PR
OP
ER
TY O
FC
RO
SS
BO
W T
EC
HN
OLO
GY
INC
. IT
IS IS
SU
ED
IN S
TRIC
T C
ON
FID
EN
CE
AN
D S
HA
LL N
OT
BE
RE
PR
OD
UC
ED
OR
CO
PIE
D O
R U
SE
D (P
AR
TIA
LLY
OR
WH
OLL
Y)
IN A
NY
MA
NN
ER
WIT
HO
UT
PR
IOR
EX
PR
ES
S W
RIT
TEN
AU
THO
RIZ
ATI
ON
OF
CR
OS
SB
OW
TE
CH
NO
LOG
Y IN
C.
DA
TE
DW
N
CH
K
AP
RV
D
AP
RV
D
AD
C7
PIR
_PW
R
AD
C1
AD
C[0
..7]
INT
1
PW
6
PIR
_PW
R
PIR
_PW
R
PIR
_PW
R
AD
C[0
..7]
TH
ER
M_P
WR
PW
[0..7
]
INT
[0..3
]
AC
+
I2C
_CLK
I2C
_DA
TA
VC
C
R59
47.5
K
R65
100K
R62
1.00
M
C63
47uF
R58
18.2
K
+ -
V+ V-
U24
MA
X44
66
1 34
5 2
U29
B
AD
5242
16 15 14 13125 11
A2
W2
B2
O2
VS
S
VC
C
GN
D
PIRD S
U26
LHI8
78
321
C62
0.01
5uF
R56
100K
R61
47.5
K RT
1
10K
C68
47uF
C72
.033
uF
C60
47uF
V+ V-
+ -
U28
LMC
7215
5
31
2
4
C69
1000
pF
C66
.1uF
R60
1.00
M
Q4 ZX
M61
P03
F
1
32
C64
0.01
uF
R57
18.2
K
R66
10.0
K
C59 47
uF
C61
47uF
PIRD S
U27
LHI8
78
321
PIRD S
U19
LHI8
78
321
C70
1000
pF
U29
A
AD
5242
2 3 4
6789 10
1
A1
W1
B1
SD
SC
LS
DA
AD
0A
D1
O1
R64
PH
OT
O
R75
100K
C67
1000
pF
+ -
V+ V-
U23
MA
X44
66
1 34
5 2
PIRD S
U25
LHI8
78
321
D12
SD
M10
K45
181

A.3 XSM 2.0
182

A.3.1 XSM 2.0 Top View
183

A.3.2 XSM 2.0 Bottom View
184

A.3.3 XSM 2.0 Acoustic Subsystem
5 5
4 4
3 3
2 2
1 1
DD
CC
BB
AA
VR
EF
VR
EF
PW
3
AU
DIO
_R
X_P
WR
AU
DIO
_R
X_P
WR
INT
1
AU
DIO
_R
X_P
WR
AD
C2
VF
ILT
VR
EF
VF
ILT
AU
DIO
_R
X_P
WR
AU
DIO
_R
X_P
WR
AU
DIO
_R
X_P
WR
AU
DIO
_R
X_P
WR
AU
DIO
_R
X_P
WR
AU
DIO
_R
X_P
WR
AU
DIO
_R
X_P
WR
AU
DIO
_R
X_P
WR
VC
C
PW
[0..
7]
I2C
_C
LK
0I2
C_
DA
TA
0
I2C
_C
LK
0I2
C_
DA
TA
0
I2C
_D
AT
A0
I2C
_C
LK
0
AD
C[0
..7
]
INT
[0..
3]
Titl
e
Siz
eD
ocu
men
t N
um
ber
Re
v
Da
te:
Sh
eet
of
EX
CE
PT
AS
MA
Y B
E O
TH
ER
WIS
E P
RO
VID
ED
BY
CO
NT
RA
CT
, T
HIS
DR
AW
ING
OR
SP
EC
IFIC
AT
ION
IS
TH
E P
RO
PR
IET
AR
Y P
RO
PE
RT
Y O
FC
RO
SS
BO
W T
EC
HN
OLO
GY
IN
C.
IT
IS
IS
SU
ED
IN
ST
RIC
T C
ON
FID
EN
CE
AN
D S
HA
LL
NO
T B
E R
EP
RO
DU
CE
D O
R C
OP
IED
OR
US
ED
(P
AR
TIA
LLY
OR
WH
OL
LY
) IN
AN
Y M
AN
NE
R W
ITH
OU
T P
RIO
R E
XP
RE
SS
WR
ITT
EN
AU
TH
OR
IZA
TIO
N O
F C
RO
SS
BO
W T
EC
HN
OLO
GY
IN
C.
DA
TE
DW
N
CH
K
AP
RV
D
AP
RV
D63
10-0
336-
02A
XS
M10
0CA
XT
RE
ME
SC
ALE
MO
TE
Cro
ssbo
w T
echn
olog
y41
Dag
gett
Driv
eS
an J
ose,
CA
. 951
34
B1
8W
ed
nes
day
, Ju
ne
30
, 2
00
4
X
XX
/XX
/XX
5-14
-04
XX
/XX
/XX
P.
DU
TT
A
X
M.
GR
IMM
ER
5-14
-04
MICROPHONE
ADDR[01]
ADDR[11]
ADDR[10]
20 Hz to
4 kHz
HPF
100 Hz to
10 kHz
LPF
OHIO STATE UNIVERSITY AND CROSSBOW
R99
100K
Q1 ZX
M61
P03
F
1
32
R10
110
0K
C74
0.0
1uF
R10
0
100K
MM
1 MIC
1 2
C79
.1u
F
R10
100K
R93
47
0 O
HM
U21
A
AD
5242A
12
W1
3
B1
4
SD
6S
CL
7S
DA
8
AD
09
AD
110
O1
1
+ -
V+
V-
U2
MA
X44
66
1 34
5 2
C1
10uF
C95
1uF
R54
10.0
K
C6
10uF
+ -
V+
V-
U31
MA
X44
66
1 34
5 2
R95
10.0
K
U38
A
AD
5242A
12
W1
3
B1
4
SD
6S
CL
7S
DA
8
AD
09
AD
110
O1
1
U37
A
AD
5242A
12
W1
3
B1
4
SD
6S
CL
7S
DA
8
AD
09
AD
110
O1
1
R6
1.10
KR
81.
10K
R2
1.10
K
C75
0.0
22u
F
C4
1uF
+ -
V+
V-
U1
MA
X44
66
1 34
5 2
C94
10uF
R18
1.10
K
R1
100K
U21
B
AD
5242A
216
W2
15
B2
14
O2
13V
SS
12
VC
C5
GN
D11
R3
1.10
K
R98
100K
+ -
V+
V-
U32
MA
X44
66
1 34
5 2
U38
B
AD
5242A
216
W2
15
B2
14
O2
13V
SS
12
VC
C5
GN
D11
R94
240
OH
M
C78
.1u
F
C5
1uF
R11
100K
R5
0 O
HM
C81
10uF
R97
10.0
K
U37
B
AD
5242A
216
W2
15
B2
14
O2
13V
SS
12
VC
C5
GN
D11
R4
100K
R7
1.10
K
R19
1.10
K
V+
V-
+ -
U3
LMC
7215
5
31
2
4
C80
1000
pF
185

A.3.4 XSM 2.0 Power, Accelerometer, LEDs, and GrenadeTimer
5 5
4 4
3 3
2 2
1 1
DD
CC
BB
AA
AD
C1
AD
C[0
..7
]
PW
4
AD
C3
AD
C4
VC
C
VC
C
VC
CV
CC
VC
C
VC
C
VC
C
SE
RIA
L_
ID
WR
RS
TN
RD
PW
0
TH
ER
M_P
WR
I2C
_C
LK
I2C
_D
AT
A
I2C
_D
AT
A0
I2C
_D
AT
A1
I2C
_C
LK
1
I2C
_C
LK
0
PW
[0..
7]
AD
C[0
..7
]
Titl
e
Siz
eD
ocu
men
t N
um
ber
Re
v
Da
te:
Sh
eet
of
EX
CE
PT
AS
MA
Y B
E O
TH
ER
WIS
E P
RO
VID
ED
BY
CO
NT
RA
CT
, T
HIS
DR
AW
ING
OR
SP
EC
IFIC
AT
ION
IS
TH
E P
RO
PR
IET
AR
Y P
RO
PE
RT
Y O
FC
RO
SS
BO
W T
EC
HN
OLO
GY
IN
C.
IT
IS
IS
SU
ED
IN
ST
RIC
T C
ON
FID
EN
CE
AN
D S
HA
LL
NO
T B
E R
EP
RO
DU
CE
D O
R C
OP
IED
OR
US
ED
(P
AR
TIA
LLY
OR
WH
OL
LY
) IN
AN
Y M
AN
NE
R W
ITH
OU
T P
RIO
R E
XP
RE
SS
WR
ITT
EN
AU
TH
OR
IZA
TIO
N O
F C
RO
SS
BO
W T
EC
HN
OLO
GY
IN
C.
DA
TE
DW
N
CH
K
AP
RV
D
AP
RV
D63
10-0
336-
02A
XS
M10
0CA
XT
RE
ME
SC
ALE
MO
TE
Cro
ssbo
w T
echn
olog
y41
Dag
gett
Driv
eS
an J
ose,
CA
. 951
34
B2
8W
ed
nes
day
, Ju
ne
30
, 2
00
4
X
XX
/XX
/XX
5-14
-04
XX
/XX
/XX
P.
DU
TT
A
X
M.
GR
IMM
ER
5-14
-04
POWER/GRENADE TIMER/LEDS
remove switch
OHIO STATE UNIVERSITY AND CROSSBOW
U30
DS
2417
DIO
2
X2
6
INT
3V
CC
4
X1
5
C76
1000
pF
R11
3
330K
C17
.1u
F
SW
1
SP
DT
12
3
R76
100K
1%
R10
3
0 O
HM
U8
AD
XL2
02A
E
ST
1
T2
2
GN
D3
YO
UT
4X
OU
T5
YF
ILT
6X
FIL
T7
VC
C8
R11
2
100
1 0
U33
NC
7S
B31
57
31
65
4
RT
1
10K
C16
.1u
FC
60
.1u
F
R11
0
4.7K
C18
.1u
F
R10
8
4.7K
Y4
32
.76
8KH
Z
2134
R66
10.0
K
R21
1K
R70
0 O
HM
R11
1
4.7K
J6 HD
R 2
X 1
X .1
11
22
R64
PH
OT
O
R10
9
4.7K
U20
TC
7WH
74
D2
CK
1Q
5
/Q3
VC
C8
PR
7
CL
6
R69
10.0
K
C19
.1u
F
R57
10.0
K
C15
.1u
F
R63
4.7K
R10
7
4.7K
U39
74
AC
H1G
08
1 24
5
R20
0 O
HM
R22
4.7K
186

A.3.5 XSM 2.0 Sounder Subsystem
5 5
4 4
3 3
2 2
1 1
DD
CC
BB
AA
PW
2
VS
W-
VS
W+
SO
UN
D_
PW
R
VC
C
PW
M1B
PW
[0..
7]
Titl
e
Siz
eD
ocu
men
t N
um
ber
Re
v
Da
te:
Sh
eet
of
EX
CE
PT
AS
MA
Y B
E O
TH
ER
WIS
E P
RO
VID
ED
BY
CO
NT
RA
CT
, T
HIS
DR
AW
ING
OR
SP
EC
IFIC
AT
ION
IS
TH
E P
RO
PR
IET
AR
Y P
RO
PE
RT
Y O
FC
RO
SS
BO
W T
EC
HN
OLO
GY
IN
C.
IT
IS
IS
SU
ED
IN
ST
RIC
T C
ON
FID
EN
CE
AN
D S
HA
LL
NO
T B
E R
EP
RO
DU
CE
D O
R C
OP
IED
OR
US
ED
(P
AR
TIA
LLY
OR
WH
OL
LY
) IN
AN
Y M
AN
NE
R W
ITH
OU
T P
RIO
R E
XP
RE
SS
WR
ITT
EN
AU
TH
OR
IZA
TIO
N O
F C
RO
SS
BO
W T
EC
HN
OLO
GY
IN
C.
DA
TE
DW
N
CH
K
AP
RV
D
AP
RV
D63
10-0
336-
02A
XS
M10
0CA
XT
RE
ME
SC
ALE
MO
TE
Cro
ssbo
w T
echn
olog
y41
Dag
gett
Driv
eS
an J
ose,
CA
. 951
34
B3
8W
ed
nes
day
, Ju
ne
30
, 2
00
4
X
XX
/XX
/XX
5-14
-04
XX
/XX
/XX
P.
DU
TT
A
X
M.
GR
IMM
ER
5-14
-04
SOUNDER
OHIO STATE UNIVERSITY AND CROSSBOW
C9
2.2
UF
C13
2.2
UF
Q2 ZX
M61
P03
F
1
32
R15
43.2
K
C77
1000
pF
C10
.1u
F
C12
2.2
UF
PZ
1 BU
ZZ
ER
1 2
V+
V-
+ -
U5
LM73
01
2
31
5
4
U6 M
AX
864C
2+2
C2-
4
NC
10
FC
08
NC
9C
1-1
V+
15
C1+
16
V-
5
IN12
NC
14N
C13
SH
DN
6F
C1
7
C14
2.2
UF
R12
100K
R17
15K
187

A.3.6 XSM 2.0 Radio Subsystem
5 5
4 4
3 3
2 2
1 1
DD
CC
BB
AA
PA
LE
PD
AT
A
DC
LK
DC
LK
AV
CC
AV
CC
VC
C
VC
C
AV
CC
VC
C
AV
CC
VC
C
SP
I_S
CK
PC
LKP
DA
TA
PA
LE
AD
C0
SP
I_M
ISO
CH
P_
OU
T
Titl
e
Siz
eD
ocu
men
t N
um
ber
Re
v
Da
te:
Sh
eet
of
EX
CE
PT
AS
MA
Y B
E O
TH
ER
WIS
E P
RO
VID
ED
BY
CO
NT
RA
CT
, T
HIS
DR
AW
ING
OR
SP
EC
IFIC
AT
ION
IS
TH
E P
RO
PR
IET
AR
Y P
RO
PE
RT
Y O
FC
RO
SS
BO
W T
EC
HN
OLO
GY
IN
C.
IT
IS
IS
SU
ED
IN
ST
RIC
T C
ON
FID
EN
CE
AN
D S
HA
LL
NO
T B
E R
EP
RO
DU
CE
D O
R C
OP
IED
OR
US
ED
(P
AR
TIA
LLY
OR
WH
OL
LY
) IN
AN
Y M
AN
NE
R W
ITH
OU
T P
RIO
R E
XP
RE
SS
WR
ITT
EN
AU
TH
OR
IZA
TIO
N O
F C
RO
SS
BO
W T
EC
HN
OLO
GY
IN
C.
DA
TE
DW
N
CH
K
AP
RV
D
AP
RV
D63
10-0
336-
02A
XS
M10
0CA
XT
RE
ME
SC
ALE
MO
TE
Cro
ssbo
w T
echn
olog
y41
Dag
gett
Driv
eS
an J
ose,
CA
. 951
34
B4
8F
rid
ay,
Au
gu
st 0
6,
20
04
X
XX
/XX
/XX
5-14
-04
XX
/XX
/XX
P.
DU
TT
A
X
M.
GR
IMM
ER
5-14
-04
50 OHM LINES
50 OHM LINES
50 OHM LINES
RADIO
OHIO STATE UNIVERSITY AND CROSSBOW
L4 33nH
C31
1000
pF
C27
15pF
C32
22pF
U9
CC
100
0
VCC21
AVCC1
AVCC5
AVCC9
AVCC15
RF
_IN
3
RF
_OU
T4
L110
L211
CH
P_O
UT
12
R_B
IAS
13X
OS
C1
18
XO
SC
217
DIO
23
DC
LK24
PC
LK25
PD
AT
A26
PA
LE27
RS
SI
28
C20
.03
3uF
C21
1000
pF
L5 10nH
R29
82.5
K
C24
220p
F
C33
4.7
pF
M6
MT
G12
5/30
0
1
R25
1M
C30
22pF
L6 39nH
C99
22pF
C34
12pF
C22
1000
pF
Y1
14
.745
6MH
Z
22
11
R26
1M
C29
4.7
pF
C25
.03
3uF
C28
8.0
pF
L2 68nH
R24
1M
C35
12pF
C26
1000
pF
C23
220p
F
R28
27.4
K
L3 6.8
NH
L1
BE
AD
-080
5
R27
10K
188
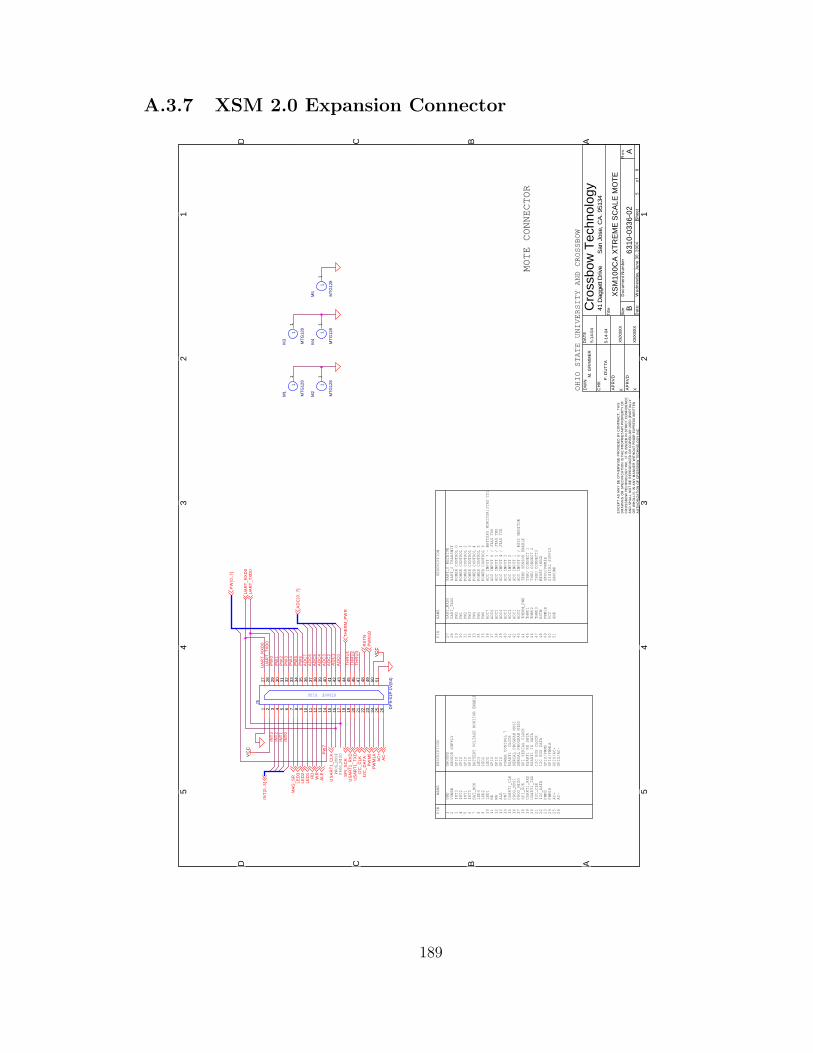
A.3.7 XSM 2.0 Expansion Connector
5 5
4 4
3 3
2 2
1 1
DD
CC
BB
AA
PW
2IN
T2
AD
C7
PW
5
TH
RU
1
INT
3
AD
C6
AD
C2
PW
0
AD
C0
TH
RU
2
PW
6
AD
C1
UA
RT
_TX
D0
PW
1
TH
RU
3
INT
0
AD
C4
INT
1
PW
4P
W3
AD
C3
UA
RT
_RX
D0
PW
7
AD
C5
VC
C
VC
C
LED
1 SP
I_S
CK
I2C
_C
LK
MA
G_S
R
PW
M1A
RS
TN
PW
[0..
7]
WR
UA
RT
_TX
D0
US
AR
T1_
TX
D
US
AR
T1_
CLK
LED
2
PW
M0
AC
-
INT
[0..
3]
RD
TH
ER
M_P
WR
US
AR
T1_
RX
D
LED
3
ALE I2
C_
DA
TA
AC
+
PW
M1B
AD
C[0
..7
]
UA
RT
_RX
D0
Titl
e
Siz
eD
ocu
men
t N
um
ber
Re
v
Da
te:
Sh
eet
of
EX
CE
PT
AS
MA
Y B
E O
TH
ER
WIS
E P
RO
VID
ED
BY
CO
NT
RA
CT
, T
HIS
DR
AW
ING
OR
SP
EC
IFIC
AT
ION
IS
TH
E P
RO
PR
IET
AR
Y P
RO
PE
RT
Y O
FC
RO
SS
BO
W T
EC
HN
OLO
GY
IN
C.
IT
IS
IS
SU
ED
IN
ST
RIC
T C
ON
FID
EN
CE
AN
D S
HA
LL
NO
T B
E R
EP
RO
DU
CE
D O
R C
OP
IED
OR
US
ED
(P
AR
TIA
LLY
OR
WH
OL
LY
) IN
AN
Y M
AN
NE
R W
ITH
OU
T P
RIO
R E
XP
RE
SS
WR
ITT
EN
AU
TH
OR
IZA
TIO
N O
F C
RO
SS
BO
W T
EC
HN
OLO
GY
IN
C.
DA
TE
DW
N
CH
K
AP
RV
D
AP
RV
D63
10-0
336-
02A
XS
M10
0CA
XT
RE
ME
SC
ALE
MO
TE
Cro
ssbo
w T
echn
olog
y41
Dag
gett
Driv
eS
an J
ose,
CA
. 951
34
B5
8W
ed
nes
day
, Ju
ne
30
, 2
00
4
X
XX
/XX
/XX
5-14
-04
XX
/XX
/XX
P.
DU
TT
A
X
M.
GR
IMM
ER
5-14
-04
PIN
NAME
DESCRIPTION
1 2 3 4 5 6 7 8 9 10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
GND
VSNSR
INT3
INT2
INT1
INT0
BAT_MON
LED3
LED2
LED1
RD
WR
ALE
PW7
USART1_CLK
PROG_MOSI
PROG_MISO
SPI_SCK
USART1_RXD
USART1_TXD
I2C_CLK
I2C_DATA
PWM0
PWM1A
AC+
AC-
GROUND
SENSOR SUPPLY
GPIO
GPIO
GPIO
GPIO
BATTERY VOLTAGE MONITOR ENABLE
LED3
LED2
LED1
GPIO
GPIO
GPIO
POWER CONTROL 7
USART1 CLOCK
SERIAL PROGRAM MOSI
SERIAL PROGRAM MISO
SPI SERIAL CLOCK
USART1 RX DATA
USART1 TX DATA
I2C BUS CLOCK
I2C BUS DATA
GPIO/PWM0
GPIO/PWM1A
GPIO/AC+
GPIO/AC-
UART_RXD0
UART_TXD0
PW0
PW1
PW2
PW3
PW4
PW5
PW6
ADC7
ADC6
ADC5
ADC4
ADC3
ADC2
ADC1
ADC0
THERM_PWR
THRU1
THRU2
THRU3
RSTN
PWM1B
VCC
GND
NAME
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
PIN
DESCRIPTION
UART_0 RECEIVE
UART_0 TRANSMIT
POWER CONTROL 0
POWER CONTROL 1
POWER CONTROL 2
POWER CONTROL 3
POWER CONTROL 4
POWER CONTROL 5
POWER CONTROL 6
ADC INPUT 7 - BATTERY MONITOR/JTAG TDI
ADC INPUT 6 / JTAG TDO
ADC INPUT 5 / JTAG TMS
ADC INPUT 4 / JTAG TCK
ADC INPUT 3
ADC INPUT 2
ADC INPUT 1
ADC INPUT 0 / RSSI MONITOR
TEMP SENSOR ENABLE
THRU CONNECT 1
THRU CONNECT 2
THRU CONNECT3
RESET (NEG)
GPIO/PWM1B
DIGITAL SUPPLY
GROUND
MOTE CONNECTOR
PROG_MOSI
PROG_MISO
OHIO STATE UNIVERSITY AND CROSSBOW
HIROSE PLUG
J5
DF
9-5
1P-1
V(5
4)
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26
27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51
M5
MT
G12
8
11
M3
MT
G12
8
11
M4
MT
G12
8
11
M1
MT
G12
8
11
M2
MT
G12
8
11
189

A.3.8 XSM 2.0 Microcontroller and Memory Subsystem
5 5
4 4
3 3
2 2
1 1
DD
CC
BB
AA
FL
AS
H_
CS
SE
RIA
L_
ID
PW
7P
W6
PW
5P
W4
PW
3P
W2
PW
1P
W0
US
AR
T1_
RX
DU
SA
RT
1_C
LKU
SA
RT
1_T
XD
UA
RT
_TX
D0
US
AR
T1_
RX
D
LED
3
FL
AS
H_
CS
FL
AS
H_
CS
SP
I_M
OS
IA
DC
3
AD
C5
AD
C4
AD
C0
AD
C6
AD
C2
AD
C7
AD
C1
INT
1IN
T2
INT
3
INT
0
INT
[0..
3]
LED
1
LED
2
SE
RIA
L_
ID
PW
M1A
PW
M1C
INT
0
I2C
_C
LK
I2C
_D
AT
A ALE
ALE
RS
TN
VC
C
VC
C
VC
C
VC
CV
CC
VC
C
VC
C
VS
NS
R
VC
C
VC
C
VC
C
VC
C
PC
LKP
DA
TA
LED
3LE
D2
LED
1
MA
G_S
RC
HP
_O
UT
TH
ER
M_P
WR
PW
[0..
7]
SP
I_S
CK
PW
M0
PW
M1A
PW
M1B
RS
TN
INT
[0..
3]
UA
RT
_RX
D0
UA
RT
_TX
D0
AC
-
AD
C[0
..7
]
WR
RD
ALE
SP
I_M
ISO
I2C
_C
LK
I2C
_D
AT
AU
SA
RT
1_R
XD
US
AR
T1_
TX
DP
ALE
US
AR
T1_
CLK
AC
+
PW
M1C
SE
RIA
L_
ID
I2C
_D
AT
A1
I2C
_C
LK
1
I2C
_C
LK
0I2
C_
DA
TA
0
Titl
e
Siz
eD
ocu
men
t N
um
ber
Re
v
Da
te:
Sh
eet
of
EX
CE
PT
AS
MA
Y B
E O
TH
ER
WIS
E P
RO
VID
ED
BY
CO
NT
RA
CT
, T
HIS
DR
AW
ING
OR
SP
EC
IFIC
AT
ION
IS
TH
E P
RO
PR
IET
AR
Y P
RO
PE
RT
Y O
FC
RO
SS
BO
W T
EC
HN
OLO
GY
IN
C.
IT
IS
IS
SU
ED
IN
ST
RIC
T C
ON
FID
EN
CE
AN
D S
HA
LL
NO
T B
E R
EP
RO
DU
CE
D O
R C
OP
IED
OR
US
ED
(P
AR
TIA
LLY
OR
WH
OL
LY
) IN
AN
Y M
AN
NE
R W
ITH
OU
T P
RIO
R E
XP
RE
SS
WR
ITT
EN
AU
TH
OR
IZA
TIO
N O
F C
RO
SS
BO
W T
EC
HN
OLO
GY
IN
C.
DA
TE
DW
N
CH
K
AP
RV
D
AP
RV
D63
10-0
336-
02A
XS
M10
0CA
XT
RE
ME
SC
ALE
MO
TE
Cro
ssbo
w T
echn
olog
y41
Dag
gett
Driv
eS
an J
ose,
CA
. 951
34
B6
8W
ed
nes
day
, Ju
ne
30
, 2
00
4
X
XX
/XX
/XX
5-14
-04
XX
/XX
/XX
P.
DU
TT
A
X
M.
GR
IMM
ER
5-14
-04
CPU/FLASH/SERIAL ID
OHIO STATE UNIVERSITY AND CROSSBOW
NO STUFF
NO STUFF
R68
100K
C46
1000
pF
U12
DS
2401
P
DQ
2
D8
YE
LL
OW
12
C43
.1u
F
C47
1000
pF
C39
.01
uF
C44
.1u
F
1 0
U44 N
C7
SB
3157
31
65
4
R36
10K
R34
1M
D4
GR
EE
N
12
R31
10K
R90
100K
C50
12pF
C40
.01
uF
D7
GR
EE
N
12
C38
.01
uF
C45
.1u
F
C73
0.1
uF
R32
1M
D3
RE
D
12
R38
470
Y2
7.3
728
MH
Z
X2
2
X2
3X
14
X1
1
C36
10uF
6.3
V
Y3
32
.76
8K
HZ21
34
C48
1000
pF
R40
470
R91
100K
U10
AT
ME
GA
128L
PA
0/A
D0
51
PA
1/A
D1
50
PA
2/A
D2
49
PA
3/A
D3
48
PA
4/A
D4
47
PA
5/A
D5
46
PA
6/A
D6
45
PA
7/A
D7
44
PB
0/S
S10
PB
1/S
CK
11
PB
2/M
OS
I12
PB
3/M
ISO
13
PB
4/O
C0
14
PB
5/O
C1A
15
PB
6/O
C1B
16
PB
7/O
C1C
17
PC
0/A
835
PC
1/A
936
PC
2/A
1037
PC
3/A
1138
PC
4/A
1239
PC
5/A
1340
PC
6/A
1441
PC
7/A
1542
PD
0/IN
T0
25
PD
1/IN
T1
26
PD
2/R
XD
127
PD
3/T
XD
128
PD
4/IC
129
PD
5/X
CK
130
PD
6/T
131
PD
7/T
232
PE
0/R
XD
02
PE
1/T
XD
03
PE
2/X
CK
04
PE
3/O
C3A
5
PE
4/O
C3B
6
PE
5/O
C3C
7
PE
6/T
38
PE
7/IC
39
PF
0/A
DC
061
PF
1/A
DC
160
PF
2/A
DC
259
PF
3/A
DC
358
PF
4/T
CK
57
PF
5/T
MS
56
PF
6/T
DO
55
PF
7/T
DI
54
AVCC64
AREF62
PE
N1
RST20XTAL1 24
XTAL2 23
PG
0/W
R33
PG
1/R
D34
PG
2/A
LE43
PG3/TOSC2 18PG4/TOSC1 19
1 0
U45
NC
7S
B31
57
31
65
4C
5112
pF
C37
.01
uF
D6
RE
D
12
D5
YE
LL
OW
12
C41
.01
uF
SW
3
PB
SP
ST
RA
12
34
R9
100K
R67
10.0
K
R30
470
R37
4.7K
SW
2
PB
SP
ST
12
53 4
C49
1000
pF
U11
AT
45D
B04
1
SI
1
SC
K2
RS
T3
CS
4W
P5
SO
8
R35
10K
R33
0 O
HM
C42
.01
uF
R39
470
R10
4
10K
190
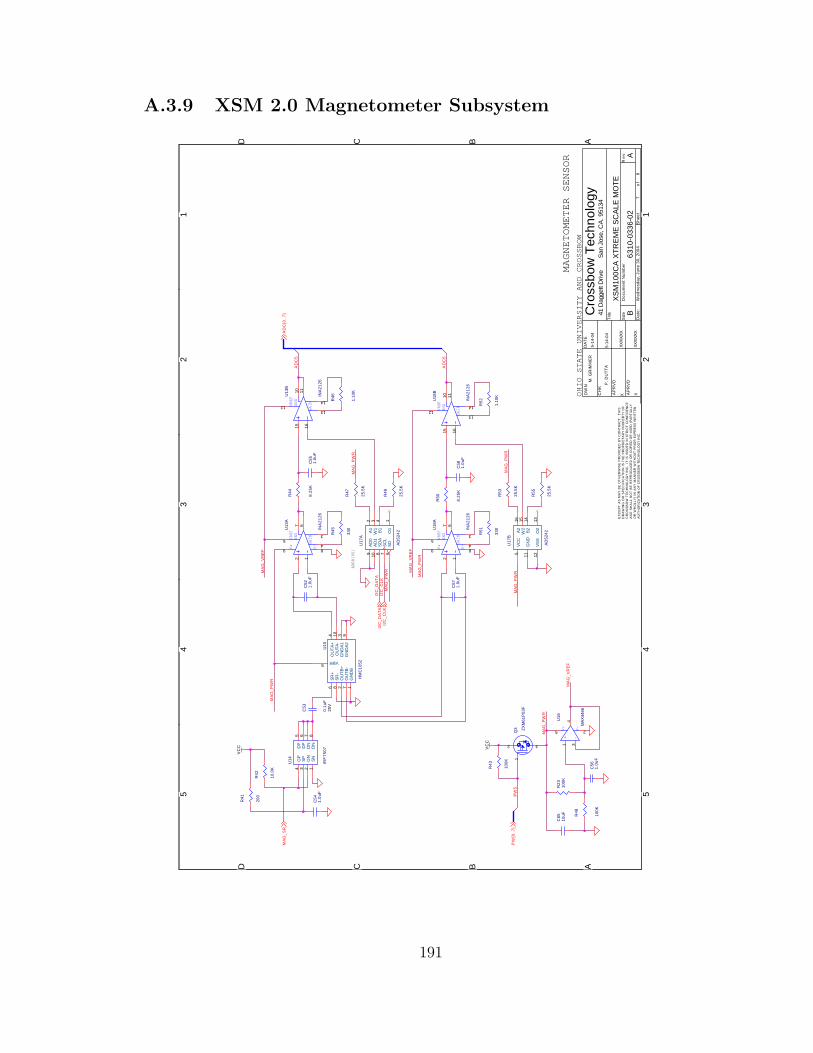
A.3.9 XSM 2.0 Magnetometer Subsystem
5 5
4 4
3 3
2 2
1 1
DD
CC
BB
AA
PW
5
MA
G_P
WR
MA
G_P
WR M
AG
_VR
EF
MA
G_P
WR
I2C
_D
AT
A
AD
C6
MA
G_P
WR
MA
G_V
RE
F
MA
G_V
RE
F
AD
C5
MA
G_P
WR
I2C
_C
LK
MA
G_P
WR
MA
G_P
WR
VC
C VC
C
MA
G_S
R
PW
[0..
7]
I2C
_C
LK
1I2
C_
DA
TA
1
AD
C[0
..7
]
Titl
e
Siz
eD
ocu
men
t N
um
ber
Re
v
Da
te:
Sh
eet
of
EX
CE
PT
AS
MA
Y B
E O
TH
ER
WIS
E P
RO
VID
ED
BY
CO
NT
RA
CT
, T
HIS
DR
AW
ING
OR
SP
EC
IFIC
AT
ION
IS
TH
E P
RO
PR
IET
AR
Y P
RO
PE
RT
Y O
FC
RO
SS
BO
W T
EC
HN
OLO
GY
IN
C.
IT
IS
IS
SU
ED
IN
ST
RIC
T C
ON
FID
EN
CE
AN
D S
HA
LL
NO
T B
E R
EP
RO
DU
CE
D O
R C
OP
IED
OR
US
ED
(P
AR
TIA
LLY
OR
WH
OL
LY
) IN
AN
Y M
AN
NE
R W
ITH
OU
T P
RIO
R E
XP
RE
SS
WR
ITT
EN
AU
TH
OR
IZA
TIO
N O
F C
RO
SS
BO
W T
EC
HN
OLO
GY
IN
C.
DA
TE
DW
N
CH
K
AP
RV
D
AP
RV
D63
10-0
336-
02A
XS
M10
0CA
XT
RE
ME
SC
ALE
MO
TE
Cro
ssbo
w T
echn
olog
y41
Dag
gett
Driv
eS
an J
ose,
CA
. 951
34
B7
8W
ed
nes
day
, Ju
ne
30
, 2
00
4
X
XX
/XX
/XX
5-14
-04
XX
/XX
/XX
P.
DU
TT
A
X
M.
GR
IMM
ER
5-14
-04
MAGNETOMETER SENSOR
OHIO STATE UNIVERSITY AND CROSSBOW
ADDR[00]
R51
330
U15
HM
C10
52
GN
DB
1
OU
TB
+2
GN
DA
13
OU
TA
+4
VBR5
SR
+6
OU
TB
-7
SR
-8
GN
DA
29
OU
TA
-10
C58
1.0
uF
U17
A
AD
5242A
12
W1
3
B1
4
SD
6S
CL
7S
DA
8
AD
09
AD
110
O1
1
C56
1.0
uF
C55
1.0
uF
R55
25.5
K
R23
100K
C52
1.0
uF
R43
100K
GAIN
SNS
VREFU
13B
INA
21
26
15 16
13
14
1110
12
GAIN
V+
V-
SNS
VREF
U18
A
INA
21
26
2 1
4
3
9 8
67
5
R52
1.10
K
R49
25.5
K
U14
IRF
75
07
SN
1G
N2
SP
3G
P4
DP
5
DP
6
DN
7
DN
8
R44
8.2
5K
U17
B
AD
5242A
216
W2
15
B2
14
O2
13V
SS
12
VC
C5
GN
D11
R41
200
R48
100K
R47
25.5
K
C53
0.1
uF
25V
R53
25.5
K
C57
1.0
uF
C54
1.0
uF
R50
8.2
5K
Q3 ZX
M61
P03
F
1
32GAIN
V+
V-
SNS
VREF
U13
A
INA
21
26
2 1
4
3
9 8
67
5
C65
10uF
R45
330
+ -
V+
V-
U16
MA
X44
66
1 34
5 2
GAIN
SNS
VREF
U18
B
INA
21
26
15 16
13
14
1110
12
R46
1.10
K
R42
10.0
K
191

A.3.10 XSM 2.0 Passive Infrared Subsystem
5 5
4 4
3 3
2 2
1 1
DD
CC
BB
AA
PIR
_P
WR
PIR
_P
WR
PIR
_P
WR
PIR
_P
WR
INT
2
AD
C7
PIR
_P
WR
PW
6
PIR
_P
WR
PIR
_P
WR
PIR
_P
WR
PIR
_P
WR
PIR
_P
WR
VC
C
AD
C[0
..7
]
I2C
_D
AT
A1
INT
[0..
3]
I2C
_C
LK
1
PW
[0..
7]
PW
M0
PW
M1A
AC
+
AC
-
Titl
e
Siz
eD
ocu
men
t N
um
ber
Re
v
Da
te:
Sh
eet
of
EX
CE
PT
AS
MA
Y B
E O
TH
ER
WIS
E P
RO
VID
ED
BY
CO
NT
RA
CT
, T
HIS
DR
AW
ING
OR
SP
EC
IFIC
AT
ION
IS
TH
E P
RO
PR
IET
AR
Y P
RO
PE
RT
Y O
FC
RO
SS
BO
W T
EC
HN
OLO
GY
IN
C.
IT
IS
IS
SU
ED
IN
ST
RIC
T C
ON
FID
EN
CE
AN
D S
HA
LL
NO
T B
E R
EP
RO
DU
CE
D O
R C
OP
IED
OR
US
ED
(P
AR
TIA
LLY
OR
WH
OL
LY
) IN
AN
Y M
AN
NE
R W
ITH
OU
T P
RIO
R E
XP
RE
SS
WR
ITT
EN
AU
TH
OR
IZA
TIO
N O
F C
RO
SS
BO
W T
EC
HN
OLO
GY
IN
C.
DA
TE
DW
N
CH
K
AP
RV
D
AP
RV
D63
10-0
336-
02A
XS
M10
0CA
XT
RE
ME
SC
ALE
MO
TE
Cro
ssbo
w T
echn
olog
y41
Dag
gett
Driv
eS
an J
ose,
CA
. 951
34
B8
8W
ed
nes
day
, Ju
ne
30
, 2
00
4
X
XX
/XX
/XX
5-14
-04
XX
/XX
/XX
P.
DU
TT
A
X
M.
GR
IMM
ER
5-14
-04
PIR SENSOR
OHIO STATE UNIVERSITY AND CROSSBOW
ADDR[01]
R83
1.00
M
R59
47.5
K
C61
2.2
UF
C90
47uF
+ -
V+
V-
U34
MA
X44
66
1 34
5 2
R79
4.7K
V+
V-
+ -
U22
LMC
7225
5
31
2
4
R87
47.5
KV+
V-
+ -
U40
LMC
7215
5
31
2
4
R65
100K
V+
V-
+ -
U43
LMC
7215
5
31
2
4
R13
100K
R73
100K
R89
1.00
M
PIR
D S
U26
LH
I87
8
321
+ -
V+
V-
U36
MA
X44
66
1 34
5 2
C92
47uF
C70
1000
pF
C82
2.2
UF
C83
1000
pF
C63
47uF
+ -
V+
V-
U24
MA
X44
66
1 34
5 2
C72
10uF
U29
B
AD
5242A
216
W2
15
B2
14
O2
13V
SS
12
VC
C5
GN
D11
C62
0.0
15uF
R80
4.7K
C89
2.2
UF
R56
100K
C68
47uF
+ -
V+
V-
U35
MA
X44
66
1 34
5 2
V+
V-
+ -
U41
LMC
7215
5
31
2
4
R14
100K
PIR
D S
U27
LH
I87
8
321
C85
0.0
1uF
R60
1.00
M
C66
.1u
F
Q4 ZX
M61
P03
F
1
32
C93
0.0
1uF
C87
1000
pF
R84
47.5
K
R58
4.7K
R88
10.0
K
C86
2.2
UF
C64
0.0
1uF
R10
5
25.5
K
R82
10.0
K
C97
10uF
R71
100K
R62
1.00
M
C91
1000
pF
PIR
D S
U19
LH
I87
8
321
U29
A
AD
5242A
12
W1
3
B1
4
SD
6S
CL
7S
DA
8
AD
09
AD
110
O1
1
R85
10.0
K
V+
V-
+ -
U28
LMC
7225
5
31
2
4
V+
V-
+ -
U42
LMC
7215
5
31
2
4
R86
1.00
M
R77
4.7K
C67
1000
pF
C88
0.0
1uF
+ -
V+
V-
U23
MA
X44
66
1 34
5 2
R10
6
25.5
K
R81
47.5
K
R72
100K
C84
47uF
PIR
D S
U25
LH
I87
8
321
R61
10.0
K
C71
10uF C
98
10uF
192

APPENDIX B
CIRCUIT SIMULATIONS
B.1 Acoustic
Microphone Bandpass Filter (Cascaded Sallen-Key LPF and HPF) Circuit Frequency Response (at 4kHz)
* OPAMP V+ V- Vo Gnd
.SUBCKT OPAMP 1 2 4 5
R1 2 1 1e6
E1 3 5 2 1 1e4
R0 3 4 50
.ENDS OPAMP
* LPF Vi Gnd Vo
.SUBCKT LPF 1 10 6
Cin 1 2 1e-6
C1 4 10 .01e-6
C2 6 3 .022e-6
R1 2 3 2680
R2 3 4 2680
R3 6 5 100e3
X1 5 4 6 10 OPAMP
.ENDS LPF
* HPF Vi Gnd Vo
.SUBCKT HPF 1 10 5
C1 1 2 1e-7
C2 2 3 1e-7
R1 3 10 281
R2 5 2 562
R3 5 4 100e3
X1 4 3 5 10 OPAMP
.ENDS HPF
X1 1 0 2 LPF
X2 2 0 3 HPF
V1 1 0 AC 1
.AC DEC 300 100 1000000
.PROBE
.END
193
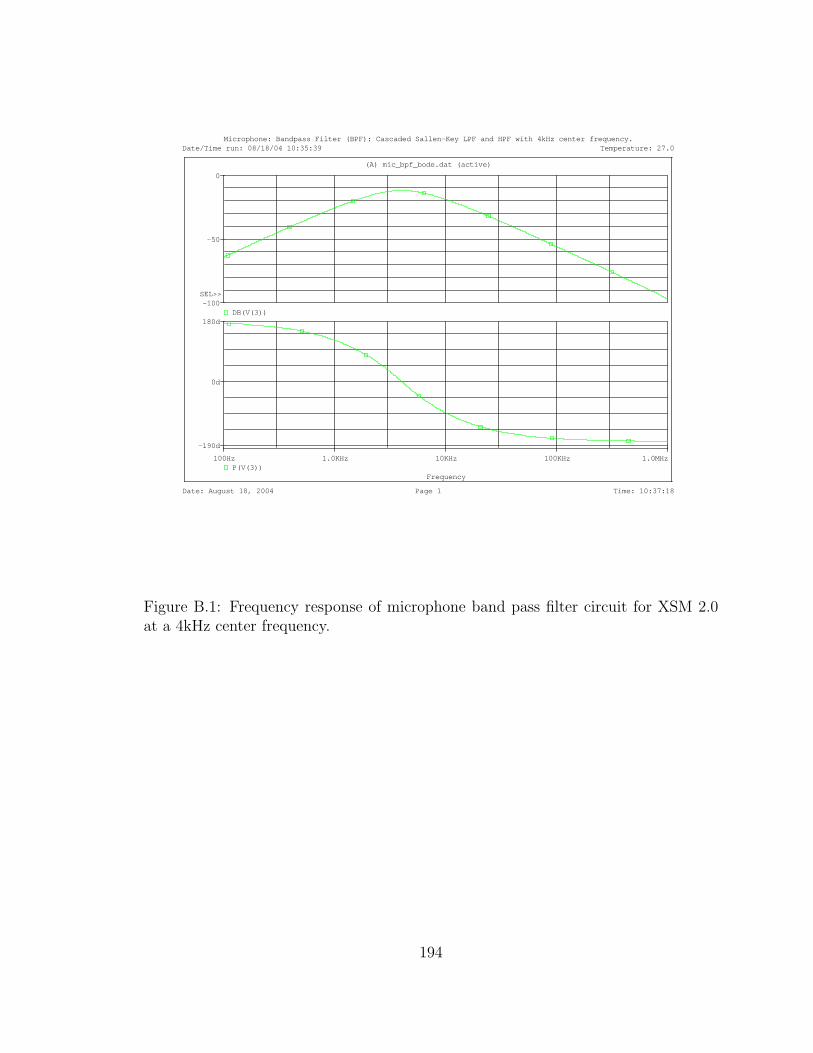
Date/Time run: 08/18/04 10:35:39Microphone: Bandpass Filter (BPF): Cascaded Sallen-Key LPF and HPF with 4kHz center frequency.
Temperature: 27.0
Date: August 18, 2004 Page 1 Time: 10:37:18
(A) mic_bpf_bode.dat (active)
Frequency
100Hz 1.0KHz 10KHz 100KHz 1.0MHzP(V(3))
-190d
0d
180dDB(V(3))
-100
-50
0
SEL>>
Figure B.1: Frequency response of microphone band pass filter circuit for XSM 2.0at a 4kHz center frequency.
194

B.2 Passive Infrared
PIR Signal Conditioning Circuit Frequency Response
* OPAMP: V- (1), V+ (2), Vout(4), Gnd (5)
.SUBCKT OPAMP 1 2 4 5
R1 2 1 1e6
E1 3 5 2 1 1e4
R0 3 4 50
.ENDS OPAMP
X1 3 1 2 0 OPAMP
C1 2 3 .01e-6
R1 2 3 1e6
C2 4 0 47e-6
R2 3 4 10e3
V1 1 0 AC 1mV
C3 2 5 2.2e-6
R3 5 8 4.7e3
X2 8 6 7 0 OPAMP
C4 7 8 .015e-6
R4 7 8 1e6
V2 100 0 DC 3
V3 0 101 DC 3
Rp 100 6 25e3
Rn 101 6 25e3
.AC DEC 100 0.001 10000
.PROBE
.END
195

Date/Time run: 07/03/04 02:31:03PIR Signal Conditioning Circuit Frequency Response
Temperature: 27.0
Date: July 03, 2004 Page 1 Time: 02:31:13
(A) pir_bpf_bode.dat (active)
Frequency
1.0mHz 10mHz 100mHz 1.0Hz 10Hz 100Hz 1.0KHz 10KHzP(V(7))
-400d
-200d
0ddB(V(7)/V(1))
-40
0
40
80
SEL>>
Figure B.2: Frequency response of PIR signal conditioning circuit for XSM 2.0.
196

APPENDIX C
PACKAGING CONCEPTS
Sensor nodes for intrusion detection may experience diverse and hostile environ-
ments with wind, rain, snow, flood, heat, cold, terrain, and canopy. The sensor
packaging is responsible for protecting the delicate electronics from these elements.
In addition, the packaging can affect the sensing and communications processes either
positively or negatively. We present several packaging concepts that were considered
for the XSM as well an enclosure design that was selected for an earlier radar sensor
node:
• Capsule: A self-righting enclosure for the radar sensor.
• Hockey Puck: A compact enclosure concept for the XSM.
• Cone: A partially self-righting enclosure concept for the XSM.
• COTS (1): A modified COTS enclosure concept for the XSM.
• COTS (2): An improved version of COTS (1) enclosure for the XSM.
197

C.1 Capsule
Figure C.1: Capsule enclosure.
The capsule-shaped enclosure is smooth and provides a self-righting capability
and minimizes wind-resistance. The enclosure body is clear to allow sunlight to illu-
minate a solar cell mounted inside. Unfortunately, this has the side effect of heating
the electronics to a level at which they intermittently fail. The sensor electronics are
mounted on a frame that is attached to the enclosure shell using a single gimbal mech-
anism. The gimbal is free to rotate along the long axis of the enclosure. The frame is
asymmetrically weighted in favor of the side with batteries so that the batteries are
on the bottom and a solar cell is on top. The gimbal mechanism, when coupled with
the rotational degree of freedom of the cylindrical enclosure, increases the likelihood
198

that the radar and radio antennas plane will be perpendicular to the ground and the
solar cell will be pointing toward the sky, helping to increase the node’s sensing range,
communications range, and lifetime.
199

C.2 Hockey Puck
2.20
1.80
SolidWorks Student LicenseAcademic Use Only Figure C.2: Hockey puck enclosure.
The hockey puck-shaped enclosure shown in Figure C.2 consists of a cover, body,
and base. The base is a mostly solid cylindrical plastic piece which increases the mass
near the bottom of the package, lowering the overall center-of-gravity, and reducing
the likelihood of the package tipping over. The base has a square-shaped cavity that
can house batteries. A second cylindrically-shaped cavity extends upward from the
battery compartment and acts as a friction-fit holder for the sounder. A smaller
cylindrical cavity extends from the top of the sounder compartment and emerges as
a hole on the top of the base. This small cavity serves as an acoustic waveguide,
channeling energy from the sounder to the environment. A similar cavity and hole
exists on the body to expose the microphone to the environment. The circular top face
200

of the base has a centered and recessed circular ring. The purpose of the recessed ring
is to aid with self-guided assembly when mating with the body which has matching
polarized holes and countersunk bosses. The body is manufactured either from an
infrared-transparent plastic or has cutouts for four passive infrared sensors. The XSM
is mounted upside down in this enclosure and the PIR reflectors protrude downward
into the four pie-slice shaped cavities.
201

C.3 Cone
SolidWorks Student LicenseAcademic Use OnlyFigure C.3: Cone enclosure, Source: Crossbow Technology.
The cone-shaped enclosure was motivated by the desire for a self-righting capabil-
ity. With such a feature, the a node could be “tossed down” much like a traffic cone
and we would be reasonably confident that it would land right-side-up and that the
magnetometers would be level. While the wide base helps to reduce the likelihood of
the cone tipping over, we would have had to add a significant amount of weight to
202

the cone’s base to ensure the self-righting capability across the spectrum of possible
laydowns.
An interesting aspect of this design is a “hanging pendulum” circuit board which
is suspended by the antenna. The figure shows the The antenna itself is attached to
the apex of the cone. However, the proposed “swivel” of the circuit board would only
have been ±10 deg to ±15 deg which would correspond to a change of less than 2-4 %
in the projection of the magnetic field onto the tilted circuit board. In other words,
for inclines not exceeding ±15 deg, very little would be gained from this feature.
203

C.4 COTS Box A
Figure C.4: Simple COTS enclosure. Source: Crossbow Technology.
The commerically-available box-shaped enclosure was motivated by a desire to
reduce cost and leverage standard products.
204

C.5 COTS Box B
Figure C.5: Heavily-modified COTS enclosure. Source: Crossbow Technology.
A variation on COTS Box A, this design inverted the circuit board, added acoustic
holes, and increased the PIR cutouts. The circuit board was inverted for two reasons.
First, by inverting the circuit board, we were able to maximize the separation between
the magnetometer and batteries. Since batteries contain magnetic materials, their
205

presence near a magnetometer tends to diminish the sensor’s sensitivity. Second,
inverting the board increased the height of the antenna by about one inch. Low-lying
antennas tend to experience increased ground absorbtion and reduced range, so by
increasing the separation between the antenna and ground, we expect to improve the
node’s transmission range.
Figure C.6: Heavily-modified COTS enclosure (transparent). Source: Crossbow Tech-nology.
206

APPENDIX D
EXPERIMENTAL DATA
D.1 Magnetometer
Preliminary experiments indicated that a number of variables affect the magni-
tude and direction of the magnetic field at a test point as a result of a ferromagnetic
object’s passage nearby. These variables include an object’s length, mass, magne-
tization, permeability, distance from the test point, orientation with respect to the
point, orientation with respect to Earth’s magnetic field, and presence of nearby fer-
romagnetic materials. The following experiments are designed to provide empirical
evidence to support a subset of the variables contemplated in the analytical model.
The experiments also provide training data for filtering, detection, classification, and
estimation algorithms.
D.1.1 Procedural Considerations
A number of procedural considerations were discovered, some in the literature,
and some experientially, that are summarized here. Following these recommendations
helps reduce the sources of noise during the data collection process and the sources
of confusion during the subsequent data analysis process.
207

Nomenclature: The term “experimental setup” or “configuration” is used to in-
dicate a static configuration of sensors. The term “experiment” refers to a
dynamic configuration used to test a hypothesis. Experiments are numbered
using Arabic numerals. The term “subexperiment” is used indicate a variation
in one or more experimental parameters like velocity or orientation but without
changing the hypothesis under test. Subexperiments are denoted by appending
a Roman capital letter to experiment identifier. The term “trial” indicates a
single execution of a given experiment or subexperiment. Trials are numbered
using Arabic numerals appended to subexperiment identifiers. The symbol B
is used to denote the magnitude of a magnetic field and Bx, By, and Bz denote
the x, y, and z components of B. The symbols vX and τX represent the target’s
velocity and a time offset for the subexperiment, respectively.
Orientation: A consistent orientation of the sensors with respect to the ambient
magnetic field is important for training data. In earlier experiments, the sen-
sitive axes A and B of the magnetometer (and x and y, respectively, for the
nomenclature used here), were oriented west and south in one setup, and north
and west in another setup. The data that was collected in those experiments
was the sum the x and y axis values, essentially resulting in an attempt to
compare Bx + By with Bx − By. The lesson is that sensor orientation matters
and that attention should be paid to a magnetometer’s sensitive axis. For the
following experiments, the sensitive axes are pointed west and south.
Orthogonality: The real problem with orientation was that the x and y components
of the magnetic field were not reported separately. This shortcoming occurred
208
due to an initially poor understanding of the theoretical model. Filtering, arith-
metical, statistical and other operations on the raw x and y data may be more
meaningful than operations on combined data streams.
Placement: It is best to avoid placing the sensors near metal objects like light poles
as these objects are likely to distort the ambient magnetic field. A compass can
be used to verify that the x and y components of the ambient magnetic field
are constant throughout the sensor test bed.
Clock Synchronization: Earlier experiments demonstrated very low clock drift
(less than 0.03%) over a period spanning more than 30 minutes and across
six separate sensors. It is unclear whether this difference is due to true clock
drift or the loss of data samples during the downloading process. Regardless,
a reasonable conclusion appears to be that in experiments lasting minutes to
hours, initial clock synchronization is sufficient and no explicit ongoing clock
synchronization is necessary over the duration of the experiment.
Personnel: The personnel carrying out these experiments should avoid wearing steel
toed shoes, metal belt buckles, and other ferromagnetic materials near the sen-
sors in order to avoid generating spurious signals.
Site Description: It is useful to capture location, weather, date, time-of-day, a site
picture, and ambient magnetic field at the sensor test bed. For the last of these
items, the National Geophysical Data Center, a part of the National Oceanic and
209

Atmospheric Association, which is itself a part of the U.S. Department of Com-
merce, hosts an online implementation of the International Geomagnetic Refer-
ence Field, a model that can compute the expected magnetic field at any point
on the Earth’s surface: http://www.ngdc.noaa.gov/IAGA/wg8/wg8.html.
D.1.2 Experimental Setup
Honeywell HMC-1002 2-axis magnetometers [66] were used as the magnetic sensor
and Mica Motes developed at Berkeley were used for the experimental platform [41]
in these experiments. There were several experimental setups or configurations used
in the experiments.
L-Setup
The L-Setup consisted of six 2-axis sensors sampling at frequency fs of 20Hz. A
pair of sensors were placed at each of the three vertices of a 24ft by 32ft L-shaped
region. If the pair of sensors located at the knee of the L is defined as the origin of a
coordinate plane with the positive y-axis pointing North, then the sensors are located
at (0,0), (24,0), and (32,0). The overall size of the sensor test bed is 40ft by 40ft and
the visible grid is on 4ft by 4ft centers.
X-Setup
Setup X consisted of five 2-axis sensors sampling at frequency fs of 20Hz. Four
of the sensors are placed at the vertices of a 16ft by 16ft square and the fifth sensor
is placed at the center of the square, in an X-shape, as shown in Figure D.1 (not to
scale). If the fifth and centrally-located sensor is defined as the origin of a coordinate
plane with the positive y-axis pointing North, then the sensors are located at (0,0),
210

(-20,-20)
(20,20)
(20,-20)
(-20,20)
(0,0)
(8,8) (-8,8)
(-8,-8) (8,-8)
N
Figure D.1: Experimental Setup.
(8,8), (-8,8), (-8,-8), and (8,-8). The overall size of the sensor test bed is 40ft by 40ft
and the visible grid is on 4ft by 4ft centers.
D.1.3 Experiments
This section describes the specific experiments that were carried out. The experi-
ments were designed to test noise statistics and the relationship between the strength
of the magnetic field at a test point as function of a target’s velocity, distance from
the test point, orientation with respect to the point, and orientation with respect to
211
Earth’s magnetic field. Due to limited time and resources, some of the contemplated
variables were not tested in isolation. Specifically, length, mass, magnetization, and
permeability were not tested in independently. These variables are coupled for most
of the easily available targets, so the target’s length and mass are noted, and its
magnetization and permeability are ignored.
Control
The purpose of the control was to capture the ambient or background noise void
of any external stimuli. Control data was captured by letting the sensors collect data
prior to starting any of the experiments. The experiments indicated that the power
spectral density of the background noise varied significantly. This majority of this
variability appears as gaussian random noise. However, non-random sources of noise
appear to be present as well.
Noise Floor
The noise floor of a measurment device is the measured noise with the device’s
inputs grounded. The noise characteristics of the Honeywell sensor is availabled in
[66] but the noise characteristics of the entire measurement system including the
two-stage amplifier and analog-to-digital converter are not known. The noise floor
consists of a number of components including 1/f noise and wideband noise. While
it is not possible to directly “ground” the magnetometer inputs, the sensor can be
placed inside a Faraday cage for the purpose of taking noise floor measurements. A
poor man’s Faraday cage was constructed from a sheet of aluminum foil as follows.
First, the sensor was wrapped with a non-conducting plastic material to prevent
short-circuiting. Then, the plastic foil encased sensor was wrapped in a sheet of
212
aluminum foil. The aluminum foil created a closed conducting surface. Finally, both
the aluminum and plastic foils were removed, concluding the experiment. The sensors
collected samples during this entire process.
Preliminary
The preliminary experiments were designed to familiarize the
Velocity
The purpose of this experiment was to determine the relationship between the
target’s velocity and magnetic signature. The hypothesis under test was that different
speeds will stretch and shrink the signal temporally, for slower and faster speeds,
respectively. The data indicates that reversing the direction of travel will cause the
sign of the signal to be reversed, relative to a bias, if present. Six subexperiments are
used to test the hypothesis. In this experiment, the target’s direction and speed of
travel are varied. The experiment is depicted graphically in Figure D.2. The double-
ended red arrow represents the target’s motion. The specific variations to the target’s
speed and direction are enumerated below. Subexperiment A
1. Velocity: vA =5mph (7.33fps); west → east
2. Trajectory (fps): x(t) = vA(t− τA); y(t) = −16
3. Target: 1999 Honda Accord
4. Trials: 3
Subexperiment B
1. Velocity: vB =10mph (14.66fps); west → east
213

(-20,-20)
(20,20)
(20,-20)
(-20,20)
(0,0)
(8,8) (-8,8)
(-8,-8) (8,-8)
Figure D.2: Velocity Experiment.
214

2. Trajectory (fps): x(t) = vB(t− τB); y(t) = −16
3. Target: 1999 Honda Accord
4. Trials: 3
Subexperiment C
1. Velocity: vC =15mph (22fps); west → east
2. Trajectory (fps): x(t) = vC(t− τC); y(t) = −16
3. Target: 1999 Honda Accord
4. Trials: 3
Subexperiment D
1. Velocity: vD =5mph (7.33fps); east → west
2. Trajectory (fps): x(t) = −vD(t− τD); y(t) = −16
3. Target: 1999 Honda Accord
4. Trials: 3
Subexperiment E
1. Velocity: vE =10mph (14.66fps); east → west
2. Trajectory (fps): x(t) = −vE(t− τE); y(t) = −16
3. Target: 1999 Honda Accord
4. Trials: 3
215

Subexperiment F
1. Velocity: vF =15mph (22fps); east → west
2. Trajectory (fps): x(t) = −vF (t− τF ); y(t) = −16
3. Target: 1999 Honda Accord
4. Trials: 3
Distance
This experiment attempts to determine the relationship between the target’s dis-
tance from the sensor and the strength of the detected magnetic field. The hypothesis
under test was that the magnetic field strength drops off in a 1/r2 fashion. Ten subex-
periments are used to test the hypothesis. In this experiment, the target’s direction
and distance from sensor are varied. The experiment is depicted graphically in Fig-
ure D.3. There are two orthogonal sets of single-ended red arrows representing the
target’s motion. The specific variations to the target’s distance and direction are
enumerated below.
Subexperiment A
1. Velocity: vA =10mph (14.66fps); west → east
2. Trajectory (fps): x(t) = vA(t− τA); y(t) = −16
3. Target: 1999 Honda Accord
4. Trials: 3
Subexperiment B
216

(-20,-20)
(20,20)
(20,-20)
(-20,20)
(0,0)
(8,8) (-8,8)
(-8,-8) (8,-8)
Figure D.3: Distance Experiment.
217

1. Velocity: vB =10mph (14.66fps); west → east
2. Trajectory (fps): x(t) = vB(t− τB); y(t) = −8
3. Target: 1999 Honda Accord
4. Trials: 3
Subexperiment C
1. Velocity: vC =10mph (14.66fps); west → east
2. Trajectory (fps): x(t) = vC(t− τC); y(t) = 0
3. Target: 1999 Honda Accord
4. Trials: 3
Subexperiment D
1. Velocity: vD =10mph (14.66fps); west → east
2. Trajectory (fps): x(t) = vD(t− τD); y(t) = 8
3. Target: 1999 Honda Accord
4. Trials: 3
Subexperiment E
1. Velocity: vE =10mph (14.66fps); west → east
2. Trajectory (fps): x(t) = vE(t− τE); y(t) = 16
3. Target: 1999 Honda Accord
218

4. Trials: 3
Subexperiment F
1. Velocity: vF =10mph (14.66fps); south → north
2. Trajectory (fps): x(t) = −16; y(t) = vF (t− τF )
3. Target: 1999 Honda Accord
4. Trials: 3
Subexperiment G
1. Velocity: vG =10mph (14.66fps); south → north
2. Trajectory (fps): x(t) = −8; y(t) = vG(t− τG)
3. Target: 1999 Honda Accord
4. Trials: 3
Subexperiment H
1. Velocity: vH =10mph (14.66fps); south → north
2. Trajectory (fps): x(t) = 0; y(t) = vH(t− τH)
3. Target: 1999 Honda Accord
4. Trials: 3
Subexperiment I
1. Velocity: vI =10mph (14.66fps); south → north
219

2. Trajectory (fps): x(t) = 8; y(t) = vI(t− τI)
3. Target: 1999 Honda Accord
4. Trials: 3
Subexperiment J
1. Velocity: vJ =10mph (14.66fps); south → north
2. Trajectory (fps): x(t) = 16; y(t) = vJ(t− τJ)
3. Target: 1999 Honda Accord
4. Trials: 3
Orientation
This experiment, when combined with earlier experiments, test the relationship
between the target’s orientation with respect to the sensor and the strength of the
detected magnetic field. The hypothesis under test was that different orientations will
result in different signal waveforms. The analysis indicates that the waveform will
appear to look like a full sinusoidal period, a half sinusoidal period, or full sinusoidal
period with one-half period damped. Ten subexperiments are used to test the hypoth-
esis. In this experiment, the orientation and starting location of the target are varied.
The experiment is depicted graphically in Figure D.4. The single-ended red arrows
represent the target’s motion. The specific variations to the target’s orientation and
starting positions are enumerated below. The results of this experiment, when cou-
pled with the results of the earlier Distance experiment, provide ample evidence to
support our hypothesis.
220

(-20,-20)
(20,20)
(20,-20)
(-20,20)
(0,0)
(8,8) (-8,8)
(-8,-8) (8,-8)
Figure D.4: Orientation Experiment.
221

Experiment : Length and Mass
Subexperiment A
1. Velocity: vA =10mph (14.66fps); southwest → northeast
2. Trajectory (fps): x(t) = vA cos(π4)(t− τA); y(t) = vA sin(π
4)(t− τA)
3. Target: 1999 Honda Accord
4. Trials: 3
Subexperiment B
1. Velocity: vB =10mph (14.66fps); westsouthwest → eastnortheast
2. Trajectory (fps): x(t) = vA cos(π6)(t− τA); y(t) = vA sin(π
6)(t− τA)
3. Target: 1999 Honda Accord
4. Trials: 3
Subexperiment C
1. Velocity: vB =10mph (14.66fps); southwest → northeast
2. Trajectory (fps): x(t) = vA cos(π4)(t− τA); y(t) = vA sin(π
4)(t− τA)
3. Target: 1999 Honda Accord
4. Trials: 3
Subexperiment D
1. Velocity: vB =10mph (14.66fps); southsouthwest → northnortheast
222

2. Trajectory (fps): x(t) = vA cos(π3)(t− τA); y(t) = vA sin(π
3)(t− τA)
3. Target: 1999 Honda Accord
4. Trials: 3
Subexperiment E
1. Velocity: vB =10mph (14.66fps); southwest → northeast
2. Trajectory (fps): x(t) = vA cos(π4)(t− τA); y(t) = vA sin(π
4)(t− τA)
3. Target: 1999 Honda Accord
4. Trials: 3
Subexperiment F
1. Velocity: vF =10mph (14.66fps); southeast → northwest
2. Trajectory (fps): x(t) = vA cos(3π4
)(t− τA); y(t) = vA sin(3π4
)(t− τA)
3. Target: 1999 Honda Accord
4. Trials: 3
Subexperiment G
1. Velocity: vG =10mph (14.66fps); southsoutheast → northnorthwest
2. Trajectory (fps): x(t) = vA cos(2π3
)(t− τA); y(t) = vA sin(2π3
)(t− τA)
3. Target: 1999 Honda Accord
4. Trials: 3
223

Subexperiment H
1. Velocity: vH =10mph (14.66fps); southeast → northwest
2. Trajectory (fps): x(t) = vA cos(3π4
)(t− τA); y(t) = vA sin(3π4
)(t− τA)
3. Target: 1999 Honda Accord
4. Trials: 3
Subexperiment I
1. Velocity: vI =10mph (14.66fps); eastsoutheast → westnorthwest
2. Trajectory (fps): x(t) = vA cos(5π6
)(t− τA); y(t) = vA sin(5π6
)(t− τA)
3. Target: 1999 Honda Accord
4. Trials: 3
Subexperiment J
1. Velocity: vJ =10mph (14.66fps); southeast → northwest
2. Trajectory (fps): x(t) = vA cos(3π4
)(t− τA); y(t) = vA sin(3π4
)(t− τA)
3. Target: 1999 Honda Accord
4. Trials: 3
Bias, Drift, and Sensitivity
This experiment attempts to observe the relationship between drift in the signal
bias and magnetometer sensitivity, if any. Earlier experiments indicated a drift in the
signal bias over time, as shown in Figure D.5. It was not clear whether bias drift was
224

0 250 500 750 1000 1250 1500 1750 2000 2250 2500 2750 3000 3250 3500 3750 4000−350
−300
−250
−200
−150
−100
−50
0
50
100
150Magnetometer Values over 16 Experiments
Samples
Mag
neto
met
er V
alue
s
Figure D.5: Magnetometer bias drift on the Mica Sensor Board.
bounded since the observation interval lasted less than 30 minutes. A drift in bias
can be corrected dynamically during signal processing but such a correction could
come at the expense of the systems ability to detect very low frequency signals. It
also appeared as if the magnetometer’s sensitivity decreased with increasing drift in
bias. However, there was insufficient data for a statistically meaningful conclusion
to be drawn. Figure D.5 shows the Bx + By values for three 2-axis magnetometers.
The red, green, and blue signals correspond to magnetometers placed at (0,0), (20,0),
and (0,32), respectively, with units measured in feet. The vertical dotted lines are
the demarcations between experiments and/or multiple trials of the same experiment.
Experiment 1 had four trials in the interval [1-999]. Experiment 2 had three trials in
225

the interval [1000-1749]. Experiment 3 had five trials in the interval [1750-2999] but
the fourth trial, with interval [2500-2749], had an external disturbance and should be
ignored. Finally, Experiment 4 had four trials in the interval [3000-3999]. A number
of observations are apparent. The green signal has a more significant noise component
than the red signal, which in turn has a stronger noise component than the blue signal.
The reason may be related to the green and red sensors’ closer proximity to a large
metal lightpole. Note that signal discontinuities at the trial boundaries reflect bias
drift in at least one of the signals in every trial boundary in the range [1-2500] but
almost none thereafter. The original signals contained 23,050 data samples each while
the displayed signals have 4,000 samples each, or only 17.35% of the original data set.
The eliminated data samples correspond to inter-trial quiet periods.
D.2 Radar
Several datasets from our UWB radar experiments are shown in Figure D.6.
1. car.txt: Urban alley. Shows 3 car passes.
2. day.txt: Large grassy field. Likely shows wind blowing leaves around.
3. dayfrontyard.txt: Urban front yard. Likely shows wind blowing treesand shrubs around.
4. heavyrain.txt: Urban front yard. Shows heavy rainfall on sensor.
5. mediumrain.txt: Urban front yard. Shows medium rainfall on sensor.
6. NE.txt: Parking garage. Person passes: walk(3), run(4), walk(3).
7. NE2.txt: Unclassified.
8. night.txt: Urban front yard at night.
9. NW.txt: Parking garage. Person passes: walk(3), run(4),
10. NW2.txt: Unclassified.
11. NW3.txt: Unclassified.
12. SE.txt: Parking garage. Person passes: walk(3), run(4), walk(3).Signal is noisy.
226

13. SE2.txt: Unclassified.
14. SE3.txt: Unclassified.
15. SW.txt: Parking garage. Person passes: walk(2), run(4), walk(3).
16. SW2.txt: Unclassified.
227

Figure D.6: UWB radar dataset thumbnails showing environmental noise, clutternoise, and signal due to targets of interest. In all cases, the initial and final burstsor clusters of data should be ignored since this corresponds to either the sensor ini-tializing or the experimenter moving near the sensor to deploy it or recover it. Thetimescales are different on the various subfigures and should not be compared di-rectly. The purpose of this figure is to provide a quick and visual method to find anappropriate dataset.
228
APPENDIX E
RELEASES
-----Original Message-----
From: Sarah Bergbreiter
Sent: Wednesday, July 07, 2004 2:45 AM
To: ’Prabal Dutta’
Subject: RE: RE: Masters thesis
...
No problems with the Mobiloc stuff -- I added it in my thesis under "future
work" :) Hope you’re having fun in Redmond and things are going well with you,
Sarah
-----Original Message-----
From: Prabal Dutta
Sent: Monday, July 05, 2004 8:01 AM
Subject: RE: RE: Masters thesis
Sarah,
...
I wanted to let you know that I am planning to incorporate a superset of the
MobiLoc work into my thesis under the concept of laziness in middleware
services (timesync, localization, routing, etc.), if that’s OK with you.
- Prabal
...
-----Original Message-----
From: Mike Horton
Sent: Tuesday, May 25, 2004 9:56 AM
To: [email protected]; [email protected]
Subject: RE: XSM schematics
Hi Prabal,
No problem.
Mike
-----Original Message-----
From: Prabal Dutta
229

Sent: Tuesday, May 25, 2004 6:01 AM
Subject: XSM schematics
Mike,
I wanted to include some of the XSM schematics in my masters thesis, much like
Joe Polastre did in his thesis with the Mica Weatherboard. However, I wanted to
get your permission before doing so. Thanks.
- Prabal
Prabal,
Sure, you can include those in your thesis. As for acknowledgements,
I’ve seen two things done: include attributions in the figure caption or include
a name in the general acknowledgement section. Either works for me. Or if you
have another option in mind I’m sure it will work.
Rob
-----Original Message-----
From: Prabal Dutta
Sent: Monday, May 24, 2004 11:20 AM
To: ’Robert Szewczyk’
Subject: RE: XSM v. Mica 2
Rob,
The document that I was working on has been sucked into my thesis. I wanted to
include the plots that you and Cory generated in my thesis and I was wondering
if (1) you’re OK with that and (2) if so, how you would like me to acknowledge
your contribution?
Thanks.
- Prabal
-----Original Message-----
From: Lin Gu
Sent: Monday, May 24, 2004 10:12 PM
To: Prabal Dutta
Subject: Re: Question
On Mon, May 24, 2004 at 06:11:56PM -0400, Prabal Dutta wrote:
>
> Lin,
>
> I wanted to include your observations about the magnetometer startup
> latency in my MS thesis and I just wanted to get your permission
> before doing so. I would of course acknowledge the source in the thesis.
Sure. I’ll be glad if that information can be a supporting material for your
thesis. Feel free to use it.
BTW, just a curious question. I find the POT setting for different
mote/magnetometer pairs are quite different. And I need to search for about a
dozen times even when varying (big then small) step sizes are used. Does this
match your experience? Also, have you found it necessary to use the set/reset
function in the magnetometer?
Best luck with your thesis!
230

lin
...
-----Original Message-----
From: Sameer Sundresh
Sent: Tuesday, May 25, 2004 11:46 AM
To: Prabal Dutta
Subject: Re: [Fwd: questions regarding the extreme scaling mote platform]
Sure, that’s fine. We have some data on our website:
http://www-osl.cs.uiuc.edu/nest/data/?M=D
Prabal Dutta wrote:
> Sameer,
>
> I wanted to include your observations about the anisotropic radiation
> pattern of the Mica2’s in my MS thesis and I just wanted to get your
> permission before doing so. I would of course acknowledge the source
> in the thesis.
>
> - Prabal
231
BIBLIOGRAPHY
[1] Mark Hewish, “Reformatting fighter tactics,” Jane’s International DefenseReview, June 2001.
[2] Gregory J. Pottie, “Wireless sensor networks,” in IEEE Information TheoryWorkshop Proceedings, June 1998.
[3] G.J. Pottie and W.J. Kaiser, “Wireless integrated network sensors,” Communi-cations of the ACM, vol. 43, no. 5, pp. 51–58, May 2000.
[4] J. M. Kahn, R. H. Katz, and K. S. J. Pister, “Next century challenges: Mobilenetworking for ”smart dust”,” in International Conference on Mobile Computingand Networking (MOBICOM), 1999, pp. 271–278.
[5] David Tennenhouse, “Proactive computing,” Communications of the ACM, vol.43, no. 5, pp. 43–50, May 2000.
[6] B. West, P. Flikkema, T. Sisk, and G. Koch, “Wireless sensor networks fordense spatio-temporal monitoring of the environment: A case for integratedcircuit, system, and network design,” in 2001 IEEE CAS Workshop on WirelessCommunications and Networking, Notre Dame, Indiana, Aug. 2001.
[7] Samuel Madden, The Design and Evaluation of a Query Processing Architecturefor Sensor Networks, Ph.D. thesis, U.C. Berkeley, 2003.
[8] Joseph Polastre, “Design and implementation of wireless sensor networks forhabitat monitoring,” M.S. thesis, U.C. Berkeley, 2003.
[9] S. Adlakha, S. Ganeriwal, C. Schurgers, and M. B. Srivastava, “Density, accu-racy, delay and lifetime tradeoffs in wireless sensor networks: A multidimensionaldesign perspective,” Proceedings of ACM Sensys 2003, Los Angeles, California,2003.
[10] T. He, S. Krishnamurthy, J. Stankovic, T. Abdelzaher, L. Luo, T. Yan, L. Gu,J. Hui, and B. Krogh, “Energy-efficient surveillance systems using wireless sensornetworks,” in Mobisys 2004, June 2004.
232

[11] Lin Gu and Jack Stankovic, “Radio triggered wake-up capability for sensornetworks,” in Real-Time Applications Symposium, May 2004.
[12] A. Arora, P. Dutta, S. Bapat, V. Kulathumani, H. Zhang, V. Naik, V. Mit-tal, H. Cao, M. Gouda, Y. Choi, T. Herman, S. Kulkarni, U. Arumugam,M. Nesterenko, A. Vora, and M. Miyashita, “A line in the sand: A wirelesssensor network for target detection, classification, and tracking,” Computer Net-works Journal, Oct. 2004.
[13] Ronald E. Walpole and Raymond H. Myers, Probability and Statistics for Engi-neers and Scientists, The Macmillan Company, New York, 1972.
[14] Kay Romer, “Time synchronization in ad hoc networks,” in MobiHoc 2001, June2004.
[15] Bruno Sinopoli, Courtney Sharp, Luca Schenato, Shawn Schaffert, andS. Shankar Sastry, “Distributed control applications within sensor networks,”Proceedings of the IEEE, Special Issue on Sensor Networks and Applications,vol. 91, no. 8, pp. 1235–1246, Aug. 2003.
[16] Chris Savarese, Jan Rabaey, and Koen Langendoen, “Robust positioning algo-rithms for distributed ad-hoc wireless sensor networks,” in USENIX TechnicalAnnual Conference. USENIX, 2002, pp. 317–328.
[17] Cory Sharp and et.al., “Design and implementation of a sensor network systemfor vehicle tracking and autonomous interception (personal communication),”2004.
[18] M.J. Dong, G. Yung, and W.J. Kaiser, “Low power signal processing architec-tures for network microsensors,” in Proceedings of 1997 International Symposiumon Low Power Electronics and Design, Monterey, CA, USA, Aug. 1997, pp. 173–177.
[19] David H. Goldberg, Andreas G. Andreou, Pedro Julian, Philippe O. Pouliquen,Laurence Riddle, and Rich Rosasco, “A wake-up detector for an acoustic surveil-lance sensor network: algorithm and vlsi implementation,” in Third InternationalSymposium on Information Processing in Sensor Networks (IPSN 2004), 2004.
[20] G. Zhou, T. He, S. Krishnamurthy, and J. Stankovic, “Impact of radio irregu-larity on wireless sensor networks,” in Mobisys 2004, June 2004.
[21] Sameer Sundresh, “Mica-2 experimental data,” http://www-osl.cs.uiuc.edu/
nest/data/?M=D, Feb. 2004.
[22] Crossbow Technology, Mote In-Network Programming User Reference, CrossbowTechnology, 2003.
233

[23] Philip Levis, Neil Patel, David Culler, and Scott Shenker, “Trickle: A self-regulating algorithm for code propagation and maintenance in wireless sensornetworks,” in Proceedings of the First USENIX/ACM Symposium on NetworkedSystems Design and Implementation (NSDI 2004), 2004.
[24] Thanos Stathopoulos, John Heidemann, and Deborah Estrin, “A remote codeupdate mechanism for wireless sensor networks,” Tech. Rep. CENS-TR-30, Uni-versity of California, Los Angeles, Center for Embedded Networked Computing,November 2003.
[25] Jonathan W. Hui and David Culler, “The dynamic behavior of a data dissemina-tion protocol for network programming at scale,” in The 2nd ACM Conferenceon Embedded Networked Sensor Systems (SenSys’04), 2004.
[26] Abraham Silberschatz, Peter Baer Galvin, and Greg Gagne, Operating SystemConcepts, John Wiley & Sons, Inc., sixth edition, 2003.
[27] Frank Stajano and Ross Anderson, “The grenade timer: Fortifying the watchdogtimer against malicious mobile code,” in Proceedings of 7th International Work-shop on Mobile Multimedia Communications (MoMuC 2000), Waseda, Tokyo,Japan, Oct. 2000.
[28] Steven M Kay, Fundamentals of Statistical Signal Processing: Estimation The-ory, vol. I, Prentice-Hall, Inc., 1993.
[29] Steven M Kay, Fundamentals of Statistical Signal Processing: Detection Theory,vol. II, Prentice-Hall, Inc., 1998.
[30] Richard O. Duda, Peter E. Hart, and David G. Stork, Pattern Classification,John Wiley & Sons, Inc., second edition, 2001.
[31] James Karki, Analysis of the Sallen-Key Architecture, Texas Instruments, 1999.
[32] Honeywell, HMC1051/HMC1052/HMC1053: 1, 2 and 3-axis Magnetic Sensors,2004.
[33] A. Cerpa, J. Elson, D. Estrin, L. Girod, M. Hamilton, and J. Zhao, “Habitatmonitoring: Application driver for wireless communications technology,” In Pro-ceedings of the 2001 ACM SIGCOMM Workshop on Data Communications inLatin America and the Caribbean, Apr. 2001.
[34] Alan Mainwaring, Joseph Polastre, Robert Szewczyk, and David Culler, “Wire-less sensor networks for habitat monitoring,” ACM International Workshop onWireless Sensor Networks and Applications, 2002.
234

[35] J. Liu, P. Cheung, L. Guibas, and F. Zhao, “A dual-space approach to trackingand sensor management in wireless sensor networks,” In Proc. 1st ACM Int’lWorkshop on Wireless Sensor Networks and Applications, pp. 131–139, Apr.2002.
[36] J. Liu, J. Reich, and F. Zhao, “Collaborative in-network processing for targettracking,” Journal on Applied Signal Processing, 2002.
[37] Javed Aslam, Zack Butler, Florin Constantin, Valentino Crespi, George Cybenko,and Daniela Rus, “Tracking a moving object with a binary sensor network,”Proceedings of ACM Sensys 2003, Los Angeles, California, 2003.
[38] Marco Duarte and Yu-Hen Hu, “Vehicle classification in distributed sensor net-works,” Journal of Parallel and Distributed Computing, 2004, to appear.
[39] Michael J. Caruso and Lucky S. Withanawasam, “Vehicle detection and compassapplications using AMR magnetic sensors, AMR sensor documentation,” http:
//www.magneticsensors.com/datasheets/amr.pdf.
[40] C. Meesookho, S. Narayanan, and C. S. Raghavendra, “Collaborative classifi-cation applications in sensor networks,” Second IEEE Sensor Array and Multi-channel Signal Processing Workshop, Aug. 2002.
[41] Jason Hill and David Culler, “Mica: A wireless platform for deeply embeddednetworks,” IEEE Micro, vol. 22, no. 6, pp. 12–24, 2002.
[42] Jason Hill, “A software architecture supporting networked sensors,” Master’sthesis, U.C. Berkeley Dept. of Electrical Engineering and Computer Sciences,2000.
[43] David Gay, Phil Levis, Rob von Behren, Matt Welsh, Eric Brewer, and DavidCuller, “The nesc language: A holistic approach to networked embedded sys-tems,” in Proceedings of Programming Language Design and Implementation(PLDI) 2003, 2003.
[44] Seth Hollar, “Cots dust,” M.S. thesis, U.C. Berkeley, 2000.
[45] Krisofer S. J. Pister, “29 palms fixed/mobile experiment: Tracking vehicles witha uav-delivered sensor network,” 2001.
[46] U.C. Berkeley, “Magnetometer board - 2xmagvd,” http://webs.cs.berkeley.
edu/tos/hardware/design/ORCAD_FILES/2xMagvd/.
[47] Lin Gu, “Design of the extreme scale mote (personal communication),” 2004.
235

[48] Becky Failor (Ed.), “Micropower impulse radar,” Science & Technology Review,pp. 16–29, Jan. 1996.
[49] Advantaca, Inc., TWR-ISM-002-I Radar: Hardware User’s Manual, 2002.
[50] Jeremy Elson and Kay Romer, “Wireless sensor networks: A new regime fortime synchronization,” in Proceedings of the First Workshop on Hot Topics inNetworks (HotNets-I), Oct. 2002.
[51] Jeremy Elson, Time Synchronization in Wireless Sensor Networks, Ph.D. thesis,University of California, Los Angeles, 2003.
[52] Saurabh Ganeriwal, Ram Kumar, and Mani B. Srivastava, “Timing-sync pro-tocol for sensor networks,” in SenSys’03, Los Angeles, California, USA, Nov.2003.
[53] Richar Karp, Jeremy Elson, Deborah Estrin, and Scott Shenker, “Optimal andglobal time synchronization in sensornets,” Tech. Rep. CENS Technical Report0012, University of California, Los Angeles, Los Angeles, California, USA, Apr.2003.
[54] Hui Dai and Richard Han, “Tsync: a lightweight bidirectional time synchroniza-tion service for wireless sensor networks,” SIGMOBILE Mob. Comput. Commun.Rev., vol. 8, no. 1, pp. 125–139, 2004.
[55] Miklos Maroti, Branislav Kusy, Gyula Simon, and Akos Ledeczi, “The floodingtime synchronization protocol,” Tech. Rep. ISIS-04-501, Institute for SoftwareIntegrated Systems, Vanderbilt University, Nashville, Tennessee, 2004.
[56] Chipcon, Chipcon CC2420 Datasheet: 2.4 GHz IEEE 802.15.4 / ZigBee-readyRF Transceiver (v 1.2), 2003.
[57] Jeremy Elson, “Fine-grained network time synchronization using referencebroadcasts,” in Proceedings of the Fifth Symposium on Operating Systems Designand Implementation (OSDI 2002), June 2002.
[58] Neal Patwari and Alfred O. Hero, “Location estimation accuracy in wirelesssensor networks,” in Asilomar Conf. on Signals and Systems, Nov. 2002.
[59] Koen Langendoen and Niels Reijers, “Distributed localization in wireless sensornetworks: A quantitative comparison,” Computer Networks (Elsevier), vol. 43,pp. 499–518, Nov. 2003.
[60] Mihail L. Sichitiu and Vaidyanathan Ramadurai, “Localization of wireless sensornetworks with a mobile beacon,” Tech. Rep., North Carolina State University,July 2003.
236

[61] Andreas Savvides, Heemin Park, and Mani B. Srivastava, “The bits and flops ofthe n-hop multilateration primitive for node localization problems,” WSNA’02,Sept. 2002.
[62] Slobodan Simic, “A learning theory approach to sensor networks,” IEEE Per-vasive Computing, Oct. 2003.
[63] Lewis Girod, “Development and characterization of an acoustic rangefinder,”2000.
[64] Maurice Kendall and Alan Stuart, The Advanced Theory of Statistics, CharlesGriffin, London, U.K., 1979.
[65] David Schrank and Tim Lomax, “The 2003 annual urban mobility study,” Tech.Rep., Texas Transportation Institute, Texas A&M University, 2003.
[66] Honeywell, HMC1001/HMC1002/HMC1021/HMC1022: 1 and 2-axis MagneticSensors, 2003.
237