《微机控制技术》eeilab.sjtu.edu.cn/userfiles/files/实验教学2019... · 基于twido plc...
TRANSCRIPT
微机控制技术
《微机控制技术》
实验指导书
上海交通大学
电气工程实验中心
2014 年 3 月

1
基于 TWIDO PLC 的温度控制实验
一、 实验目的: 1、 熟悉 PLC 实验装置,TWIDO 系列编程控制器以及拓展模块的外部接线方法
2、 了解编程软件 TWIDOSOFT 的编程环境,软件的使用方法
3、 了解 PID 温度控制技术
4、 掌握施耐德 PLC 的 PID 模块使用方法
二、 实验设备: 1、施耐德 TWDLCAE40DRF
2、A/D D/A 模块 TWDAMM3HT
3、温度控制箱
三、 实验原理: 1、硬件简介
施耐德的 TWDLCAE40DRF 是一体型 40I/O 控制器,具有 24 个数字量输入,14 个继电器
和 2 个晶体管输出;具有 2 个模拟电位器输入;具有 1 个集成的串行口;具有一个支持附
加串行口的插槽;内置实时时钟 RTC;具有一个装有用户可更换电池的电池盒;最多连接 7
个扩展 I/O 模块;最多连接 2 个 AS-Interface V2 总线接口。该产品自带以太网接口,通
过内置的 RJ45 口,利用 TCP/IP 协议的 100 Base-TX 自适应以太网通信。额定电源电压:
100-240VAC。通过 USB或者 COM与计算机连接。
图 1 TWDLCAE40DRF
2
TWDAMM3HT作为拓展模块,它具有 2输入 1输出;信号范围: 0- 10V 或 4- 20mA。其作用
就是将温度传感器产生的 0- 10V 的电压模拟信号转换为 PLC 能够处理的数字信号, 并将
PLC 产生的数字信号转换为模拟量来驱动外电路。
模拟量 I/O 模块 TWDAMM3HT可以线性地将 0- 10V 的模拟信号转换成 0- 4095 之间的
数字信号。PLC 产生的 0- 4095 的数字信号同样可以线性地转换成 0- 10V 的模拟信号。
由于运用了该拓展模块,使得温度控制系统结构上小巧紧凑,达到更加经济、简洁的系统设
计效果。
图 2 TWDAMM3HT
2、控制对象的数学模型
控制对象的数学模型不同,控制方案的具体程序和公式也有所区别。电阻丝是利用电能
转换为热能的一个装置,流入电阻丝的热量 Q与其温升的关系为:
dC Q
dt
(1)
其中 C为物体的热容量,即要使物体的温度上升一度所需的热量(卡), 为物体的温
度;Q为流入物体的热量(卡)。
电阻丝加热的同时还要向外散发热量,所以加热元件发出的热量 Q应该等于电阻丝中的
热量 Q1和电阻丝散掉的热量 Qo之和。故上式应为
s
dC Q Q
dt
(2)
由于散发的热量 Qo与温度高低成正比,若令
sQR
(3)
其中R为比例系数,称为电阻丝的热阻。因此
dC Q
dt R
(4)
两边取拉氏变换得:
3
1 1( ) ( ) ( ) ( ) ( )C s s s Cs s Q s
R R (5)
由于测量元件会存在一定时间的滞后,使得控制信号与温度测量值之间存在着一个时滞
环节τ。控制器输出的控制信号为 U,而 U (s)与 Q( s)的关系又是成正比例,即
( ) ( )mQ s K U s (6)
而温度控制箱的输出信号即是温度信号所以
( ) ( )y s s (7)
那么
( )( )( )
1( ) ( ) 1
s sm ms K Ky s KG s e e
u s Q s TsCs
R
(8)
其中,T=R*C,称为对象的时间常数,K=Km*R,称为对象的增益。
3、PID 控制算法
在工程实际中,应用最为广泛的调节器控制规律为比例、积分、微分控制,简称 PID
控制,又称 PID调节。PID控制器问世至今已有近 70年历史,它以其结构简单、稳定性好、
工作可靠、调整方便而成为工业控制的主要技术之一。所以虽然 PID控制器产生于 19世纪
初,但今天仍被广泛应用于化工、冶金、电力、机械等工业过程控制中。目前全世界大约
有 90%的过程控制仍在使用 PID控制器及其改进型来完成反馈回路的控制。基于上述内容,
本系统采用 PID算法。PID控制的全称叫做比例积分微分控制,是由比例控制、积分控制和
微分控制三种控制组合而成的组合控制方式。当被控对象的结构和参数不能完全掌握,或
得不到精确的数学模型时,控制理论的其它技术难以采用时,系统控制器的结构和参数必
须依靠经验和现场调试来确定,这时应用 PID 控制技术最为方便。即当我们不完全了解一
个系统和被控对象,或不能通过有效的测量手段来获得系统参数时,最适合用 PID 控制技
术。PID控制,实际中也有 PI和 PD控制。PID控制器就是根据系统的误差,利用比例、 积
分、微分计算出控制量进行控制的。
比例控制——P
比例控制是一种最简单的控制方式。其控制器的输出与输入误差信号成比例关系。当
仅有比例控制时系统输出存在稳态误差(Steady-state error)。
积分控制——I
在积分控制中,控制器的输出与输入误差信号的积分成正比关系。对一个自动控制系
统,如果在进入稳态后存在稳态误差,则称这个控制系统是有稳态误差的 或简称有差系统
(System with Steady-state Error)。为了消除稳态误差,在控制器中必须引入“积分项”。
积分项对误差取决于时间的积分,随着时间的增加,积分项会增大。这样,即便误差很小,
积分项也会随着时间的增加而加大,它推动控制器的输出增大使稳态误差进一步减小,直
到等于零。因此,比例+积分(PI)控制器,可以使系统在进入稳态后无稳态误差。
微分控制——D
在微分控制中,控制器的输出与输入误差信号的微分(即误差的变化率)成正比关系。
4
自动控制系统在克服误差的调节过程中可能会出现振荡甚至失稳。其原因是由于存在有较
大惯性组件(环节)或有滞后(delay)组件,具有抑制误差的作用, 其变化总是落后于误
差的变化。解决的办法是使抑制误差的作用的变化“超前”,即在误差接近零时,抑制误
差的作用就应该是零。这就是说,在控制器中仅引入 “比例”项往往是不够的,比例项的
作用仅是放大误差的幅值,而目前需要增加的是“微分项”,它能预测误差变化的趋势,
这样,具有比例+微分的控制器,就能 够提前使抑制误差的控制作用等于零,甚至为负值,
从而避免了被控量的严重超调。所以对有较大惯性或滞后的被控对象,比例+微分(PD)控制
器能改善系统在调节过程中的动态特性。
提前使抑制误差的控制作用等于零,甚至为负值,从而避免了被控量的严重超调。由
于计算机控制是一种采样控制,它只能根据采样时刻的偏差值计算控制量,因而规律中积
分和微分项不能直接准确计算,只能用数值计算的方法逼近,其控制规律为
00
1 ( )( ) ( ) ( )
T
p d
i
de tU t K e t e d T U
T dt
(9)
式中:
e(t)——调节器输入函数,即给定量与反馈量的偏差;
U(t)——调节器输出函数
Kp——比例常数;
Ti——积分时间常数;
Td——微分时间常数;
U0——控制常量,t= 0时的输出值。
基本偏差 e(t)表示当前测量值与设定目标间的差,设定目标是被减数,结果可以
是正或负,正数表示还没有达到,负数表示已经超过了设定值。这是面向比例项用的变动
数据。
表示的调节器的输入函数和输出函数均为模拟量。为了用计算机对它进行计算,可以把连
续形式微分方程转换位离散形式的差分方程。
00
( ) ( )
T K
i
e d e T
(10)
累计偏差
( ) ( ) ( 1) ( 2) (1)e t e t e t e t e …… (11)
这是我们每一次测量到的偏差值的综合,考虑到他的正负号运算,这是面向积分项的
一个变动数据。
基本偏差的相对偏差
( ) ( ) ( 1)e t e t e t (12)
用本次的基本偏差减去上一次的基本偏差,用于考察当前控制对象的趋势,作为快速
反应的重要依据,这是面向微分项的一个变动数据。
5
取 T为采样周期,k为采样序号,k=0,1,2,3,……,i,……,k。因为采样周期 T
相对于信号变化周期是很小的,所以可以用矩形法来计算积分,用后向差分来代替微分,
即
( ) ( ) ( 1de t e k e k
dt T
)
(13)
这样式(1)就可以写成
1 ( ) ( 1)( ) ( ) ( )p d
i
e k e kU k K e k e i T T
T T
(14)
式中:
U(k)—采样时刻 k的输出值
e(k)—采样时刻 k的偏差值
e(k-1)—采样时刻 k-1的偏差值
式(2-16)中的输出量为全量输出。它对应于被控制对象的执行机构每次采样时应达到的
位置。因此,式(2-16)也是 PID控制规律的离散化形式。称为位置型 PID控制算式。
另有增量型 PID 控制算式[37]
。增量算法就是相对于标准算法的相邻两次运算之差,得
到的结果是增量,也就是说在上一次的控制量的基础上需要增加(负值意味着减少)的空
置量。在温度控制中就是需要增加(或减少)的加热比例。在增量型中,输出是执行机构
的增量△u。,即
01 1 2
1 0
1 1 1 2
( ) ( 2 )
( ) ( 2 )
Dn p n n n n n n
p n n n D n n n
T Tu K e e e e e e
T T
K e e K e K e e e
(15)
式中, K1为 PID控制算式的积分系数
01
1
p
TK K
T
(16)
KD为 PID控制算式的微分系数
0
DD p
TK K
T
(17)
3、PID 参数整定
经验试凑法在现场控制系统整定工作中,经验丰富的调试人员常采用经验整定法,它
不需要进行试验和计算,而是根据运行情况,先确定一组调节器参数,并将系统投入运行,
然后人为加入阶跃扰动,观察被调量或调节器输出的阶跃响应曲线,并依照调节器各参数
对调节过程的影响,改变相应的整定参数值,一般先比例后积分,再微分,反复试验,直
到获得满意的阶跃响应曲线为止。
6
表 1 经验法调节器参数经验数据
被控对象\整定参数 Kp Ti/min TD/min
温度 20~60 0.1~3 0.5~3
压力 1.4~3.5 0.4~3 -
流量 1~2.5 0.1~1 -
液位 1.25~5 - -
四、 实验步骤:
1、硬件部分
将 TWDAMM3HT的 out 口的正负端与温度控制箱的 UIN的正负端相连,将 TWDAMM3HT 的 IN0的
正负端与温度控制箱的 Uout的正负端相连。同时将 PLC输出的 24V直流电压用两导线连接至
TWDAMM3HT模块的供电端,综上所述,此实验的硬件接线为 6条导线。
2、软件部分
在进行温度控制系统的设计中,第一步是要得到控制对象的数学模型。我们可以采用阶
跃响应曲线法,利用 PID的手动模式得到。随后,进行 PID参数调节,按照经验法逐步调节,
直到得到满意的阶跃响应曲线为止。
具体过程如下
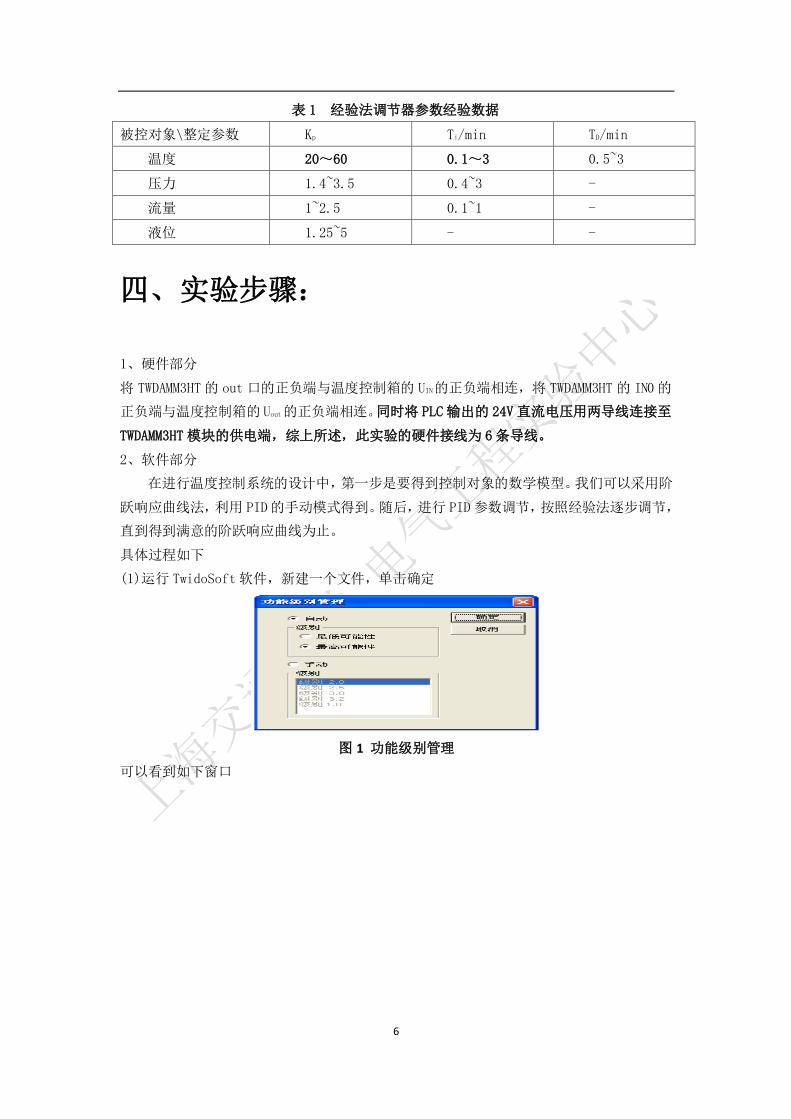
(1)运行 TwidoSoft软件,新建一个文件,单击确定
图 1 功能级别管理
可以看到如下窗口
7
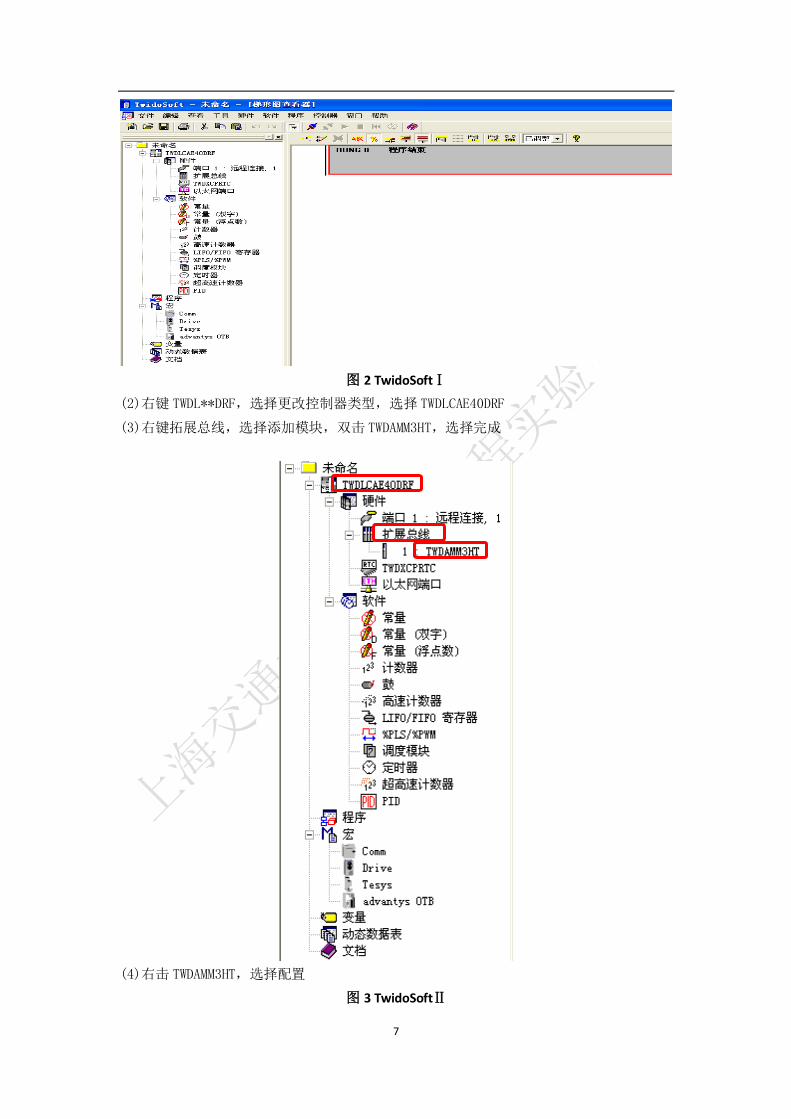
图 2 TwidoSoftⅠ
(2)右键 TWDL**DRF,选择更改控制器类型,选择 TWDLCAE40DRF
(3)右键拓展总线,选择添加模块,双击 TWDAMM3HT,选择完成
(4)右击 TWDAMM3HT,选择配置
图 3 TwidoSoftⅡ
8
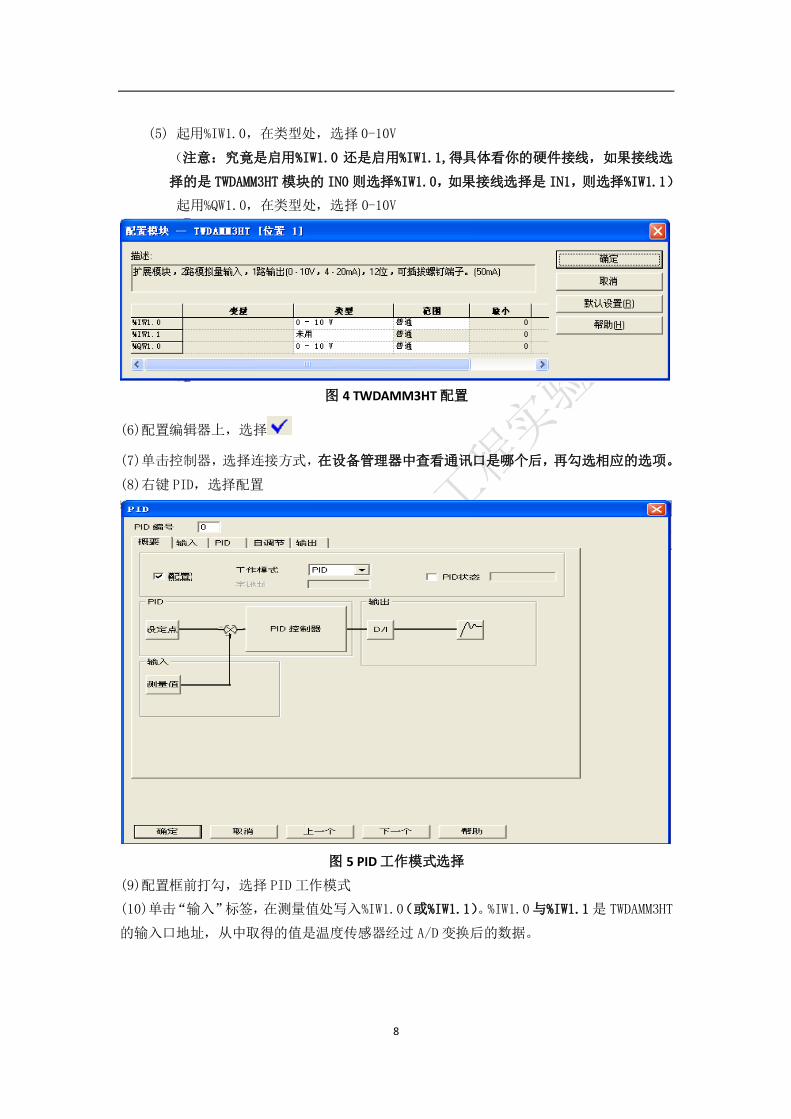
(5) 起用%IW1.0,在类型处,选择 0-10V
(注意:究竟是启用%IW1.0 还是启用%IW1.1,得具体看你的硬件接线,如果接线选
择的是 TWDAMM3HT模块的 IN0则选择%IW1.0,如果接线选择是 IN1,则选择%IW1.1)
起用%QW1.0,在类型处,选择 0-10V
图 4 TWDAMM3HT 配置
(6)配置编辑器上,选择
(7)单击控制器,选择连接方式,在设备管理器中查看通讯口是哪个后,再勾选相应的选项。
(8)右键 PID,选择配置
图 5 PID 工作模式选择
(9)配置框前打勾,选择 PID工作模式
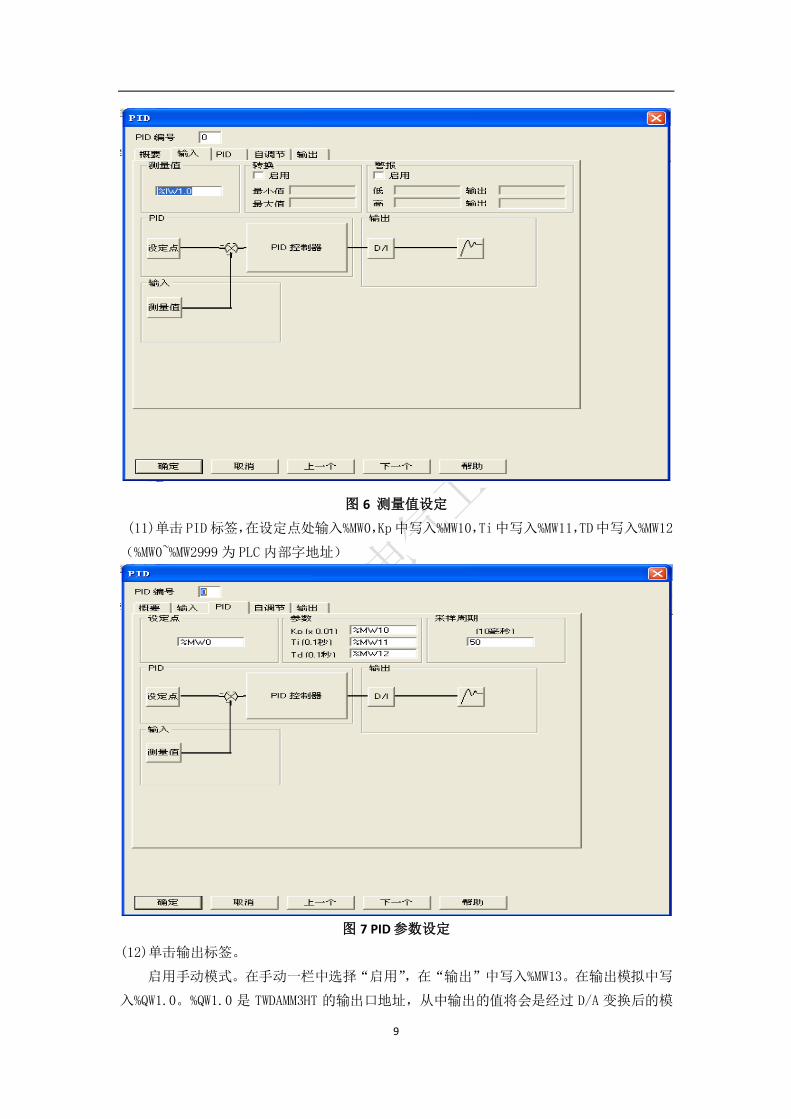
(10)单击“输入”标签,在测量值处写入%IW1.0(或%IW1.1)。%IW1.0与%IW1.1是 TWDAMM3HT
的输入口地址,从中取得的值是温度传感器经过 A/D变换后的数据。
9
图 6 测量值设定
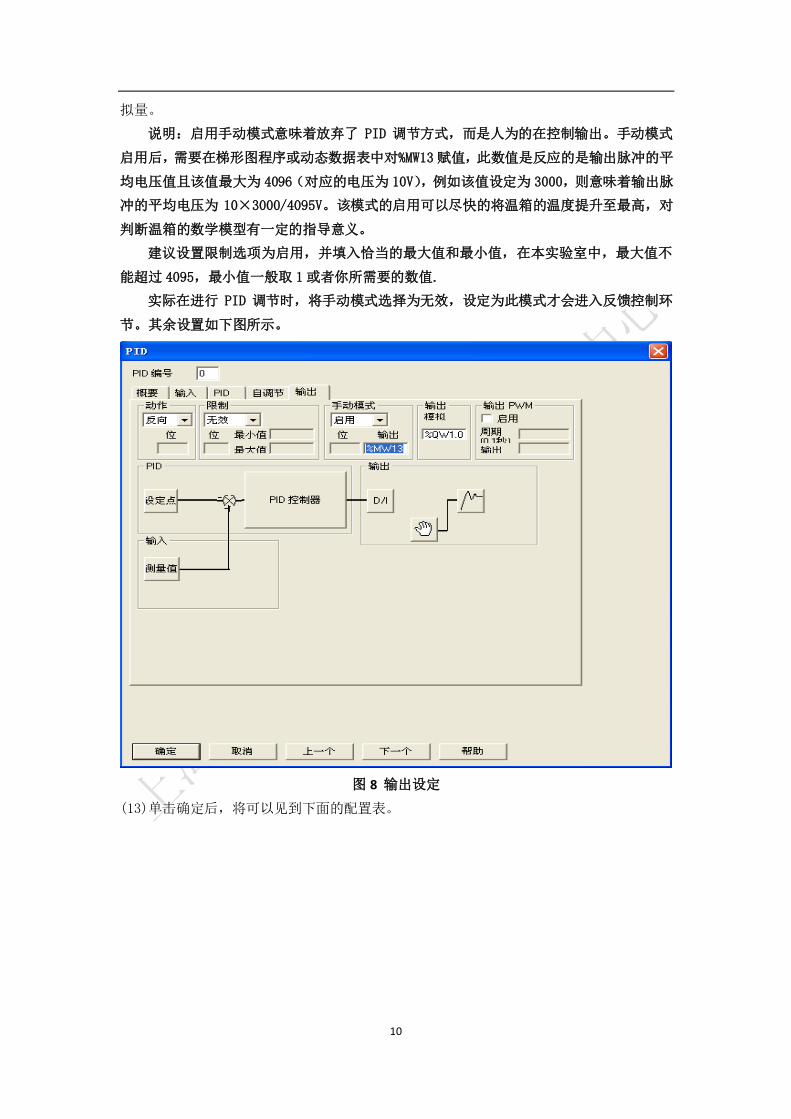
(11)单击 PID标签,在设定点处输入%MW0,Kp中写入%MW10,Ti中写入%MW11,TD中写入%MW12
(%MW0~%MW2999为 PLC内部字地址)
图 7 PID 参数设定
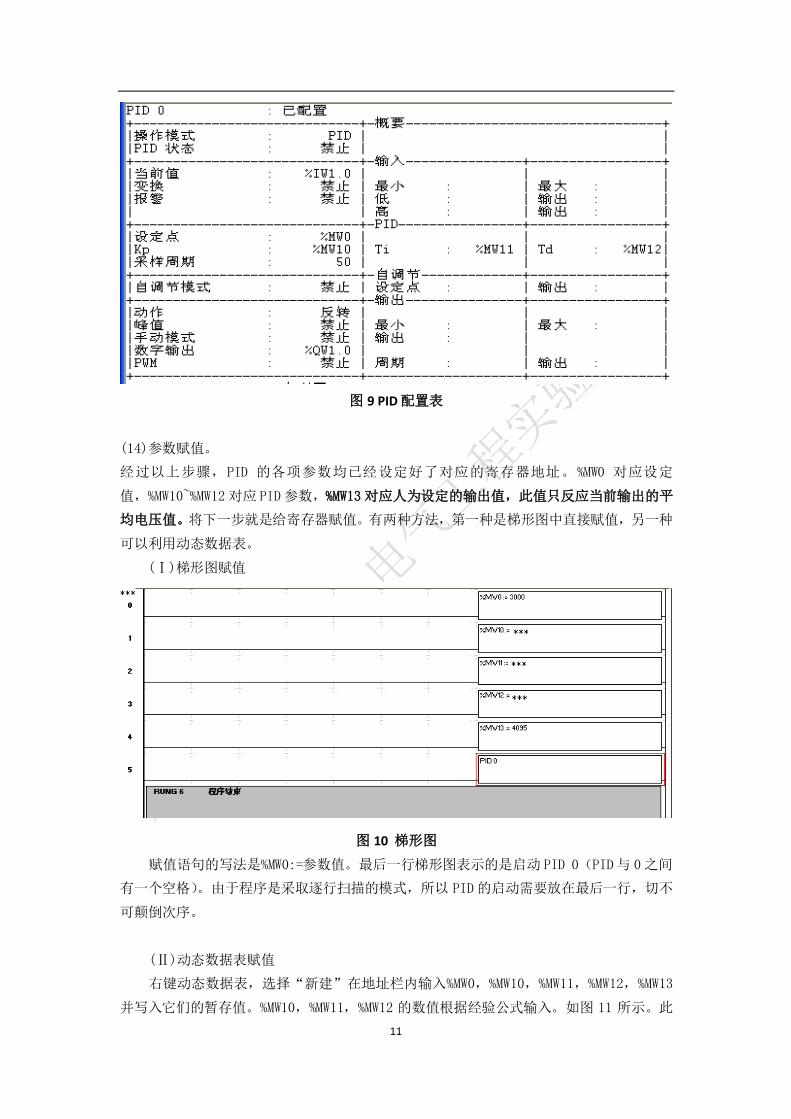
(12)单击输出标签。
启用手动模式。在手动一栏中选择“启用”,在“输出”中写入%MW13。在输出模拟中写
入%QW1.0。%QW1.0 是 TWDAMM3HT 的输出口地址,从中输出的值将会是经过 D/A 变换后的模
10
拟量。
说明:启用手动模式意味着放弃了 PID 调节方式,而是人为的在控制输出。手动模式
启用后,需要在梯形图程序或动态数据表中对%MW13赋值,此数值是反应的是输出脉冲的平
均电压值且该值最大为 4096(对应的电压为 10V),例如该值设定为 3000,则意味着输出脉
冲的平均电压为 10×3000/4095V。该模式的启用可以尽快的将温箱的温度提升至最高,对
判断温箱的数学模型有一定的指导意义。
建议设置限制选项为启用,并填入恰当的最大值和最小值,在本实验室中,最大值不
能超过 4095,最小值一般取 1或者你所需要的数值.
实际在进行 PID 调节时,将手动模式选择为无效,设定为此模式才会进入反馈控制环
节。其余设置如下图所示。
图 8 输出设定
(13)单击确定后,将可以见到下面的配置表。
11
图 9 PID 配置表
(14)参数赋值。
经过以上步骤,PID 的各项参数均已经设定好了对应的寄存器地址。%MW0 对应设定
值,%MW10~%MW12对应 PID参数,%MW13对应人为设定的输出值,此值只反应当前输出的平
均电压值。将下一步就是给寄存器赋值。有两种方法,第一种是梯形图中直接赋值,另一种
可以利用动态数据表。
(Ⅰ)梯形图赋值
图 10 梯形图
赋值语句的写法是%MW0:=参数值。最后一行梯形图表示的是启动 PID 0(PID与 0之间
有一个空格)。由于程序是采取逐行扫描的模式,所以 PID的启动需要放在最后一行,切不
可颠倒次序。
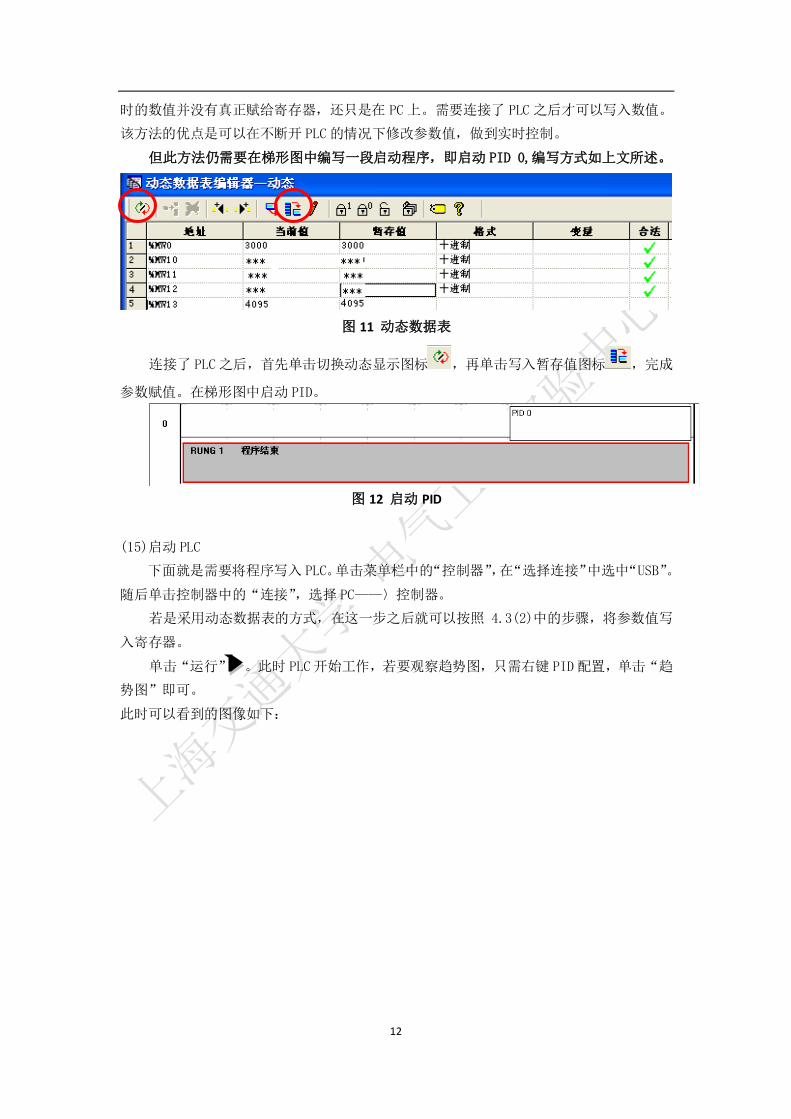
(Ⅱ)动态数据表赋值
右键动态数据表,选择“新建”在地址栏内输入%MW0,%MW10,%MW11,%MW12,%MW13
并写入它们的暂存值。%MW10,%MW11,%MW12 的数值根据经验公式输入。如图 11 所示。此
12
时的数值并没有真正赋给寄存器,还只是在 PC上。需要连接了 PLC 之后才可以写入数值。
该方法的优点是可以在不断开 PLC的情况下修改参数值,做到实时控制。
但此方法仍需要在梯形图中编写一段启动程序,即启动 PID 0,编写方式如上文所述。
图 11 动态数据表
连接了 PLC之后,首先单击切换动态显示图标 ,再单击写入暂存值图标 ,完成
参数赋值。在梯形图中启动 PID。
图 12 启动 PID
(15)启动 PLC
下面就是需要将程序写入 PLC。单击菜单栏中的“控制器”,在“选择连接”中选中“USB”。
随后单击控制器中的“连接”,选择 PC——〉控制器。
若是采用动态数据表的方式,在这一步之后就可以按照 4.3(2)中的步骤,将参数值写
入寄存器。
单击“运行” 。此时 PLC开始工作,若要观察趋势图,只需右键 PID配置,单击“趋
势图”即可。
此时可以看到的图像如下:
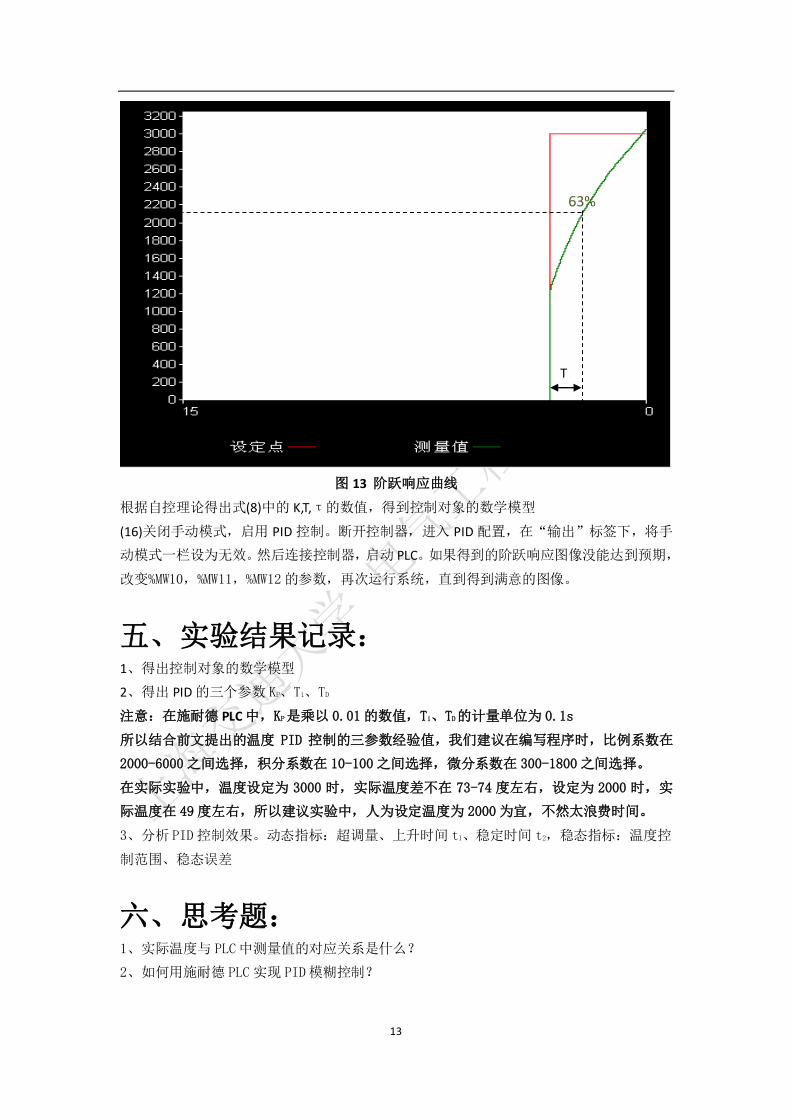
13
图 13 阶跃响应曲线
根据自控理论得出式(8)中的 K,T,τ的数值,得到控制对象的数学模型
(16)关闭手动模式,启用 PID 控制。断开控制器,进入 PID 配置,在“输出”标签下,将手
动模式一栏设为无效。然后连接控制器,启动 PLC。如果得到的阶跃响应图像没能达到预期,
改变%MW10,%MW11,%MW12的参数,再次运行系统,直到得到满意的图像。
五、 实验结果记录: 1、得出控制对象的数学模型
2、得出 PID 的三个参数 KP、Ti、TD
注意:在施耐德 PLC 中,KP是乘以 0.01的数值,Ti、TD的计量单位为 0.1s
所以结合前文提出的温度 PID 控制的三参数经验值,我们建议在编写程序时,比例系数在
2000-6000之间选择,积分系数在 10-100之间选择,微分系数在 300-1800之间选择。
在实际实验中,温度设定为 3000 时,实际温度差不在 73-74 度左右,设定为 2000 时,实
际温度在 49度左右,所以建议实验中,人为设定温度为 2000为宜,不然太浪费时间。
3、分析 PID控制效果。动态指标:超调量、上升时间 t1、稳定时间 t2,稳态指标:温度控
制范围、稳态误差
六、 思考题: 1、实际温度与 PLC中测量值的对应关系是什么?
2、如何用施耐德 PLC实现 PID模糊控制?
T
63%