numerical study on effect of reduced frequency on …ejum.fsktm.um.edu.my/article/1141.pdf ·...
TRANSCRIPT
317
International Journal of Mechanical and Materials Engineering (IJMME), Vol.6 (2011), No.3, 317-325
NUMERICAL STUDY ON EFFECT OF REDUCED FREQUENCY ON A VORTEX INDUCED
BY AN OSCILLATING SUB BOUNDARY LAYER VORTEX GENERATOR
K. A. Ahmad School of Aerospace Engineering, Universiti Sains Malaysia, Nibong Tebal 14300 Penang, Malaysia
E-mail: [email protected]
Received 1 December 2010, Accepted 25 November 2011
ABSTRACT
This paper presents a numerical study of the effects of
reduced frequency on the performance of an oscillating sub-
boundary layer vortex generator. The numerical simulations
were done using Fluent 6.3 and RANS equations were used
to model the flow field induced by the vortex generator on a
flat plate. A hybrid mesh with SST k-ω turbulence model
was used during the computations. The undisturbed
boundary layer thickness at the location of vortex generator
was 80 mm and a vane-type VG with height of 40 mm was
used. The flow Reynolds number based on the streamwise
distance is 106. The VG was oscillated in a simple harmonic
motion between 0o to 15
o over a range of reduced frequency,
F+. The increase in the spanwise averaged skin friction with
the increase in reduced frequency is clearly observed.
Furthermore, the time averaged skin friction distribution for
oscillating SBVG is less spread compared to the static
SBVG. The results also show that an increase in the reduced
frequency induces secondary vortex to appear. The
simulations result obtained are also found in satisfactory
agreement with the experimental results.
Keywords: Numerical modeling, active flow control,
vortex generator
NOMENCLATURE
c Vortex generator length
fc Skin friction
k Turbulence kinetic energy
Angle of vibration
max Maximum angle of pitch
min Minimum angle of pitch
F+
Reduced frequency
y+ Local Reynolds number
ω Specific turbulent dissipation rate
h Vortex generator’s height
P Period
t time
τ The ratio of time over VG oscillation period
δ Boundary layer thickness
SST Shear Stress Transport
U∞ freestream velocity
ω Specific turbulent dissipation rate
1. INTRODUCTION
Active flow control (AFC) is one of the areas in fluid
mechanics that is hotly being pursued by scientists and
researchers in the current century. The latest comprehensive
review and analysis on the subject was done by Gad El Hak
(2001) and Collis et al (2004). Traditionally, flow control is
confined within passive mode which requires minimal
energy consumption and easy installation. These
conventional devices however are limited to one operational
condition and cannot adapt with the change of operational
conditions (Lin 2002). Active flow control emerged in
response to overcome this barrier.
Generally, AFC involves two types of devices namely air
jets (Kupper and Henry 2003, Ekaterinaris 2004, Shojaefard
et al 2005, Coiro et al 2008) and vibrated flow control
devices (Guo 2008, Kauertz and Neuwerth 2006, Jolibois
and Moreau 2008, Lebeau et al 2007, Benard et al 2009).
The air-jet vortex generator (AJVG) has been proposed
(Kupper and Henry 2003)
as a credible alternative to
conventional vane vortex generator. They presented
streamwise and cross stream velocity profiles to describe the
vortex strength and position. The results indicated that the
downstream behavior of the predicted vortex was largely
unaffected by the shape of the velocity profile of the
incoming jet.
Ekaterinaris (2004) had used pulsating air jet on airfoils and
wings at low speed configurations. Pulsating jet active flow
control was applied as a surface boundary condition and the
flow was time-dependent. The effects of pulsation frequency
and jet exit velocity on flow control gave beneficial impacts
on the oscillation amplitude and three-dimensional profile.
Shojaefard et al (2005) also conducted research on the airjet
device. His mechanism consisted of four suction and
injection slots on the suction side of the airfoil. The results
showed that the surface suction could increase the lift
coefficient; the injection decreased the skin friction.

318
Some investigators used different techniques of blowing.
(Coiro et al 2008) investigated both the steady and
unsteady-blowing techniques as tools for turbulent
separation control. Pulsed blowing depends on two
parameters: reduced frequency and momentum coefficient.
The numerical simulation of a pulsed-blowing system was
conducted to highlight how aerodynamic performance
depended on geometrical parameters to drive the design of
the experimental test. The results showed that this technique
was very effective to delay or suppress separation on a
single component airfoil in the pre-stall configuration,
focusing on cruising conditions. One of researchers that
involved in vibrated flow control devices (Kauertz and
Neuwerth 2006). He used a simple wing model with
winglets which were able to produce a vortex system of up
to six distinct vortices. By means of active oscillation of
rudders integrated into the winglets, these vortex systems
were to be excited to initiate an accelerated decay of the
vortices. Another study about vibrated flow control device
was performed (Jolibois and Moreau 2008)
who used
dielectric barrier discharge plasma tangentially to the wall,
in order to modify velocity in the boundary layer.
Plasma actuators have been studied numerically by IeBaeau
et al (2007) as a potential effective method for boundary
layer control. This boundary layer control device was driven
by a body force vector tangent to the surface where the
actuator was integrated. The result showed that this type of
action was able to fully reattach an airflow naturally
separated, for angles of incidence up to 170. Meanwhile
Mamun et al (2010) investigated the performance of a
moving lid within the trapezoidal cavity on the heat transfer
rate via numerical approach. He found that the aspect ratio
and the direction of the moving lid have significant effects
on the heat transfer rate.
In the current paper, the author studied the effect of reduced
frequency on the vortex induced by an oscillating sub-
boundary layer vortex generator (SBVG). The author has
studied the interaction between a nominally two-
dimensional, turbulent boundary layer, and the embedded
longitudinal vortices generated by a SBVG oscillating about
an axis through its trailing edge. The reduced frequency was
varied in order to monitor its effect on the SBGV, through
the distribution of the skin friction.
2. NUMERICAL METHODS
This study employed the commercial CFD code Fluent
6.3TM
. The incompressible Reynolds-averaged Navier-
Stokes equations were modelled. There are several options
for turbulence models that are available in Fluent but this
investigation focuses on the two-equation model, SST k-.
The software was run in its implicit segrageted mode; the
SIMPLE algorithm was used for pressure-velocity coupling
and second order spatial discretisation was used for all the
equations. A range of time step of 1×10−3
to 2.5×10−4
sec
was used and 60 sub-iterations per time step was performed.
Calculations were run for several cycles, until periodicity
was observed in the solution. The simulations were
performed using the parallel version of Fluent code and this
code uses the Load Sharing Facility (LSF) on 4 parallel
processors. Time taken for most cases took approximately
24 hours.
2.1 Governing equations
The integral form of the transport equation for a general
scalar, F, on an arbitary control volume, V, which
implemented in Fluent 6.3, is as shown below:-
V V Vg
VdVSAdAduudV
dt
d ..
(1)
The first and second terms on the left are the time derivative
term and the convective terms. The time derivative term
indicates that the solution is changing with time. Meanwhile
the first and the second terms on the right of equation 1 are
the diffusive terms and the source terms. The term ∂V is
used to represent the boundary of the control volume V. The
SIMPLE algorithm is available in FluentTM
and was used for
pressure-velocity coupling and second order spatial
discretisation was used for all the equations. The time
derivative in equation 1 can be discretised using equation 2.
t
VVdV
dt
dnn
V
1
(2)
The indices n and n+1 denote, respectively, the quantity at
the current and next time level. Meanwhile the (n+1)th time
level volume Vn+1is computed from equation 3.
tdt
dVVV nn 1
(3)
The term dt
dV denotes the volume time derivative of the
control volume. In order to satisfy the grid conservation law,
the volume time derivative of the control volume is
computed from equation 4.
V
n
j
jgjg
f
AuAdudt
dV .. (4)
The term nf is the number of faces on the control volume and
jA
is the face area vector. The dot product jgj Au
on
each control volume face is identical to the volume swept by
the control volume face j over unit time:
t
VAdu
j
g
(5)
A moving mesh technique, spring-based smoothing method
(Fluent Inc) was employed to allow for oscillation of the
vortex generator boundaries; in order to avoid negative cell
volumes, it was found to be necessary to use tetrahedral cells
around the whole of the vortex generator. The value of y+ for

319
the first cell centre off the wall is about 1. The VG is rotated
about its trailing edge in simple harmonic motion and this
motion is governed by the harmonic equation shown below:
))cos(1)((2
1minmaxmin t
(6)
The frequency was chosen to be in the range of 40 Hz to 160
Hz, and this corresponds to a range of reduced frequency F+
of 4 to 10 (see equation 7).
U
cF
2
(7)
A spring based smoothing method was used to govern the
motion of the mesh. The edges between any two mesh nodes
were idealized as a network of interconnected springs. The
initial spacing of the edges before any boundary node
generates a force proportional to the displacement along all
the springs connected to the node. Using Hook’s law, the
force on a mesh node can be written as
in
j
ijiji xxkF
(8)
where jx
and ix
are the displacements of node i and its
neighbor j, ni is the number of neighboring nodes connected
to node i, and kij is the spring constant (or stiffness) between
node i and its neighbor j. The spring constant for the edge
connecting nodes i and j is defined as
||
1
ij
ijxx
k
(9)
This method is appropriate for triangular type of mesh since
they can easily be idealized as springs.
2.2 Geometry, mesh and boundary conditions
The VG has a root chord of 74.3 mm, a trailing edge span (h)
of 35 mm, and a thickness of 1.5 mm. Figure 1 shows a
single VG and the direction of its motion. The domain has
length, breadth, and depth of 1250 mm × 475 mm × 792 mm,
i.e. 34h × 10h × 20h (see Figure 2). The domain size was
chosen as such in order to obtain a domain independent
solution. The VG was placed 7h downstream of the inflow
boundary. The freestream velocity was set to 5 m/s; a
velocity profile corresponding to a Reynolds number of 106
is applied at the inflow boundary, so that at the VG location,
the undisturbed boundary layer thickness was 2h. Three
downstream locations were identified to present the cross-
flow contour plots and velocity vector plots. These locations
were X1, X2 and X3 and from VG trailing edges were 4c, 6c
and 8c (see Figure 3). A hybrid mesh approach was
employed in order to capture the main features of the
turbulent boundary layer (see Figure 4). The mesh
generation software used is the ICEMCFDTM
. Mesh
dependency check was performed and it was found that the
number of cells of 3.2 × 105 were sufficient to obtain mesh
independency.
Figure 1 Vortex generator motions
Figure 2 Computational Domain and Boundary
Conditions a) Front view b) Side view

320
Figure 3 Lateral locations for flow properties profiles
analysis
Figure 4 Sample of Mesh
2.3 Testing parameters
The simulations involved two types of flow control device
namely static SBVG and oscillated SBVG. The static SBVG
was set to have an angle of attack of 150. The results of the
static SBVG will compared with the experimental results14
.
Meanwhile for the time-dependent case, the SBVG was
oscillated in a range of reduced frequency of 4 to 10, from 00
to +150.
3. RESULTS AND DISSCUSSION
3.1 Embedded steady vortex/boundary layer interaction
A comparison between CFD and experimental results were
made for Reynolds shear stress parameters. Only results
from static SBVG were compared as the experimental
results (Martin 2001) for oscillating SBVG is not available.
Due to the turbulence modelling used in the current study, it
is impossible to obtain exact values of Reynolds shear
stresses. Instead, the Boussinesq eddy-viscosity concept can
be used to provide an estimation of the Reynolds shear
stresses. In an analogous manner to the viscous stresses
caused by mixing of momentum at the molecular level, the
turbulence stresses can be assumed to be proportional to the
mean velocity gradient via an eddy viscosity, . The
Reynolds stresses are estimated through the following
formulae,
y
Ukuu
2
3
2'' (10)
z
Uk
2
3
2'' (11)
x
V
y
Uu '' (12)
x
W
z
Uu '' (13)
y
W
z
V '' (14)
Figure 5 Comparison of Reynolds shear stress 2
/ Uu distribution at X1 (a) CFD (b) Experiment
Figures 5 to 7 show the comparison between the Reynolds
stress predictions and experimental14
results. Figure 5 shows
the primary shear stress, ''u . A distinct feature like an
inverted “mushroom cap” can be observed in Figure 5, both
in CFD and experimental results. The feature is made up of
negative ''u and with a maximum magnitude of -
0.0015. A region of high positive ''u can be observed
in the downwash region of the primary vortex. A maximum
(b)
(a)
321
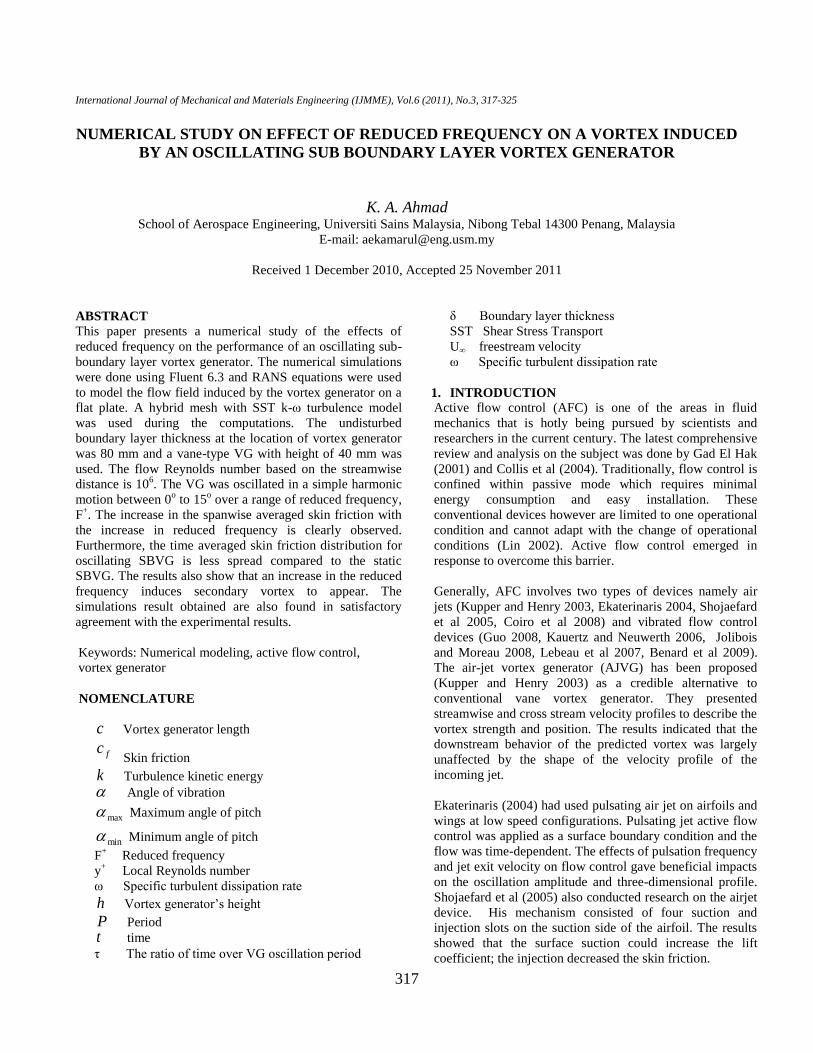
magnitude of 0.0025 is found here and made up from fluid
entrained from the upper region of the boundary layer. In
the experimental results, one can clearly observe the
inverted “mushroom cap”, made up of negative ''u .
One also can observe the region of high positive ''u in
the downwash region. These two similar features suggest
that the predictions of ''u is reasonably correct. Figure
6 shows the secondary shear stress, - ''u . From the CFD
figure, one can see peaks and trough: the trough coincides
with the vortex core and the peaks are disposed the either
sides of it. The peak to the right of the core shows the
largest positive value of ''u . From the Experimental
figure, one can see the similarity of the peaks, and the
trough. The peak to the right of vortex core however, is
likely to be seen as a “tongue”, while this feature is less
obvious in the prediction.
Figure 6 Comparison of Reynolds Shear Stress 2
/ Uwu distribution at X1(a) CFD (b) Experiment
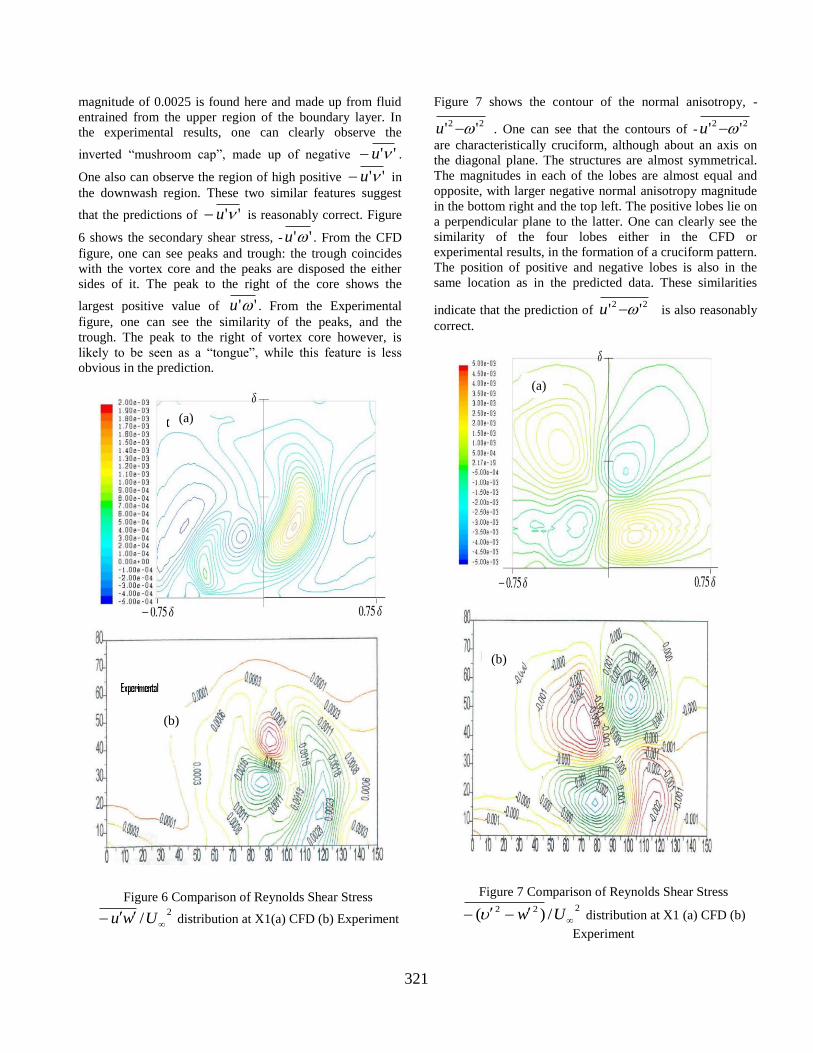
Figure 7 shows the contour of the normal anisotropy, -
22 '' u . One can see that the contours of -22 '' u
are characteristically cruciform, although about an axis on
the diagonal plane. The structures are almost symmetrical. The magnitudes in each of the lobes are almost equal and
opposite, with larger negative normal anisotropy magnitude
in the bottom right and the top left. The positive lobes lie on
a perpendicular plane to the latter. One can clearly see the
similarity of the four lobes either in the CFD or
experimental results, in the formation of a cruciform pattern.
The position of positive and negative lobes is also in the
same location as in the predicted data. These similarities
indicate that the prediction of 22 '' u is also reasonably
correct.
Figure 7 Comparison of Reynolds Shear Stress 222 /)(
Uw distribution at X1 (a) CFD (b)
Experiment
(a)
(b)
(a)
(b)

322
3.2 Embedded time dependent vortex/boundary layer
interaction
For time dependent flow, the SBVG was oscillated in a
range of reduced frequency of 4 to 10, from 0 to +15 degree
in simple harmonic motion. It is expected that the large eddy
frequency also falls into the same range; hence the selection
of the reduced frequency may stimulate a strong interaction
between the turbulent flow and the induced vortex. Figure 8
shows the contour of velocity magnitude on the cross-flow
plane at selected time steps. These figures were drawn such
that the viewer is looking downstream at the VG. The initial
state of the boundary layer and the wake can be seen at
time=0 sec. The wake of the VG is symmetric about the Y
axis. The first sign of vortex appearance is the asymmetry of
the velocity contour at = 5.33. As time progresses the
vortex continues to roll up and increases steadily until =
9.33. At this stage, the shape of the vortex core can be
observed clearly. It also can be observed that in the
common-flow down region, some thinning of the boundary
layer has taken place, due to the movement of the high-
momentum fluid drawn toward the wall. Meanwhile in the
common-flow up region, the low-momentum fluid is swept
upward causing a slight thickening of the boundary layer.
Due to this upward motion, a ’tongue’ structure appears in
the common-flow up region and rises out of the floor.
Figure 8 Contours of Velocity Magnitude at X1 location
3.3 Effects of reduced frequency
Skin friction plots have been drawn in order to show the
effects of the reduced frequency. Figure 9-11 show the
comparison of spanwise averaged skin friction between
static and oscillating SBVGs at various freestream locations
(X1, X2 and X3). From these figures, it can be observed that
there are three periods of time involved in the oscillating
SBVG history at these freestream locations. The first period
represents the flow condition before the arrival of the
induced vortex and this can be observed at the τ<5 for
location X1. This first period (also the second and third
periods) persists longer for X2, and X3 locations as they are
further downstream. The spanwise value of cf is constant
during this time period as nothing has yet happened to the
local flow.
Figure 9 Spanwise averaged of skin friction at X1
location
Figure 10 Spanwise averaged of skin friction at X2
location
The second period represents the initial interaction between
the induced vortex and the boundary layer. This can be
observed at 5< τ <15 for location X1. At the start of this
period, the spanwise averaged cf decreases momentarily due
to the arrival of the induced vortex at the measurement
location. By increasing the reduced frequency, this one-off
phenomenon becomes more apparent. The value of cf then
starts to increase until it reaches a peak value at which it
settles. Then, the flow enters upon its third period of time.
τ=0
τ=5.33
τ=6.67
τ=9.93
323
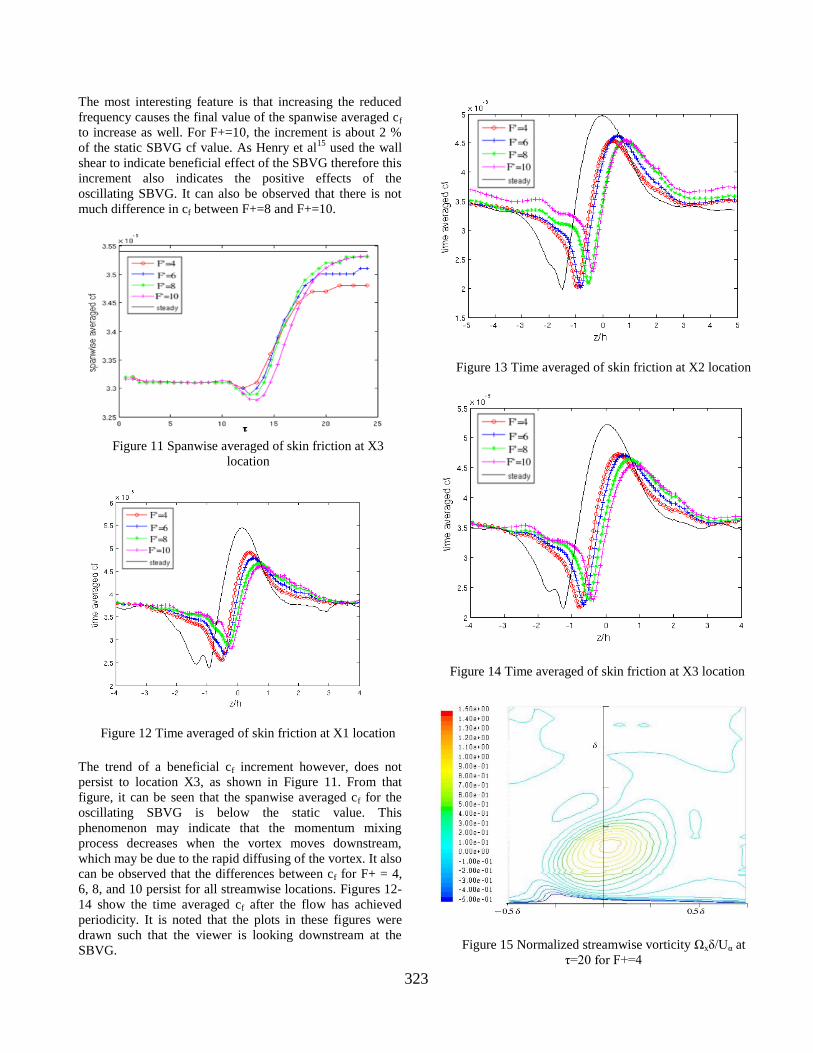
The most interesting feature is that increasing the reduced
frequency causes the final value of the spanwise averaged cf
to increase as well. For F+=10, the increment is about 2 %
of the static SBVG cf value. As Henry et al15
used the wall
shear to indicate beneficial effect of the SBVG therefore this
increment also indicates the positive effects of the
oscillating SBVG. It can also be observed that there is not
much difference in cf between F+=8 and F+=10.
Figure 11 Spanwise averaged of skin friction at X3
location
Figure 12 Time averaged of skin friction at X1 location
The trend of a beneficial cf increment however, does not
persist to location X3, as shown in Figure 11. From that
figure, it can be seen that the spanwise averaged cf for the
oscillating SBVG is below the static value. This
phenomenon may indicate that the momentum mixing
process decreases when the vortex moves downstream,
which may be due to the rapid diffusing of the vortex. It also
can be observed that the differences between cf for F+ = 4,
6, 8, and 10 persist for all streamwise locations. Figures 12-
14 show the time averaged cf after the flow has achieved
periodicity. It is noted that the plots in these figures were
drawn such that the viewer is looking downstream at the
SBVG.
Figure 13 Time averaged of skin friction at X2 location
Figure 14 Time averaged of skin friction at X3 location
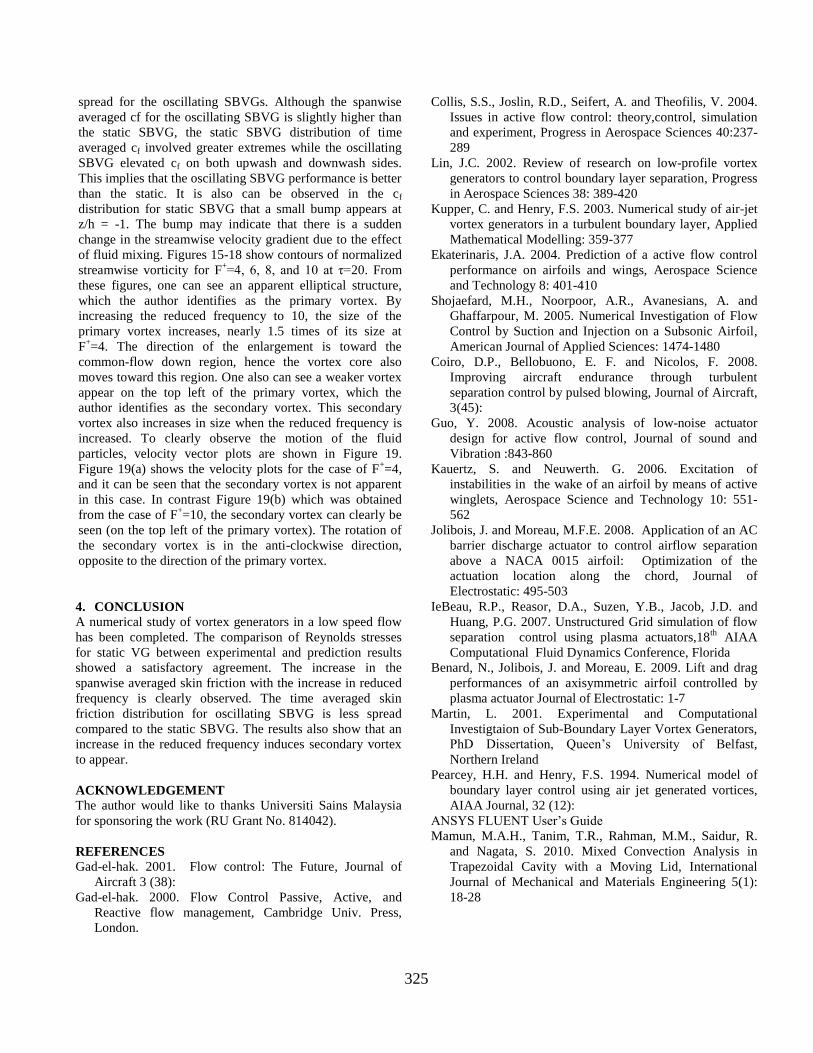
Figure 15 Normalized streamwise vorticity Ωxδ/Uα at
τ=20 for F+=4

324
Figure 16 Normalized streamwise vorticity Ωxδ/Uα at
τ=20 for F+=6
Figure 17 Normalized streamwise vorticity Ωxδ/Uα at
τ=20 for F+=8
Figure 18 Normalized streamwise vorticity Ωxδ/Uα at
τ=20 for F+=10
The first apparent remark is that the peak of the time
averaged cf for the oscillating SBVG is lower than the
static SBVG for all oscillating SBVG cases. This trend
continues up until the X3 location. The second remark is
that, the region influenced by the induced vortex is
shifted to the common-flow down region (to the right of
the domain). The shifting magnitude is directly
proportional to the reduced frequency and therefore an
increase in the value of reduced frequency also causes an
increase in the shifting magnitude.
Figure 19 Velocity vector in the X1 region at τ=20 for a)
F+=4 b) F+=10
Notice also that increasing the reduced frequency caused the
peak time averaged cf to decrease. Hence, the reduced
frequency is inversely proportional to the peak of time
averaged cf. Notice also that the distribution of cf is less
(a)
(b)
325
spread for the oscillating SBVGs. Although the spanwise
averaged cf for the oscillating SBVG is slightly higher than
the static SBVG, the static SBVG distribution of time
averaged cf involved greater extremes while the oscillating
SBVG elevated cf on both upwash and downwash sides.
This implies that the oscillating SBVG performance is better
than the static. It is also can be observed in the cf
distribution for static SBVG that a small bump appears at
z/h = -1. The bump may indicate that there is a sudden
change in the streamwise velocity gradient due to the effect
of fluid mixing. Figures 15-18 show contours of normalized
streamwise vorticity for F+=4, 6, 8, and 10 at τ=20. From
these figures, one can see an apparent elliptical structure,
which the author identifies as the primary vortex. By
increasing the reduced frequency to 10, the size of the
primary vortex increases, nearly 1.5 times of its size at
F+=4. The direction of the enlargement is toward the
common-flow down region, hence the vortex core also
moves toward this region. One also can see a weaker vortex
appear on the top left of the primary vortex, which the
author identifies as the secondary vortex. This secondary
vortex also increases in size when the reduced frequency is
increased. To clearly observe the motion of the fluid
particles, velocity vector plots are shown in Figure 19.
Figure 19(a) shows the velocity plots for the case of F+=4,
and it can be seen that the secondary vortex is not apparent
in this case. In contrast Figure 19(b) which was obtained
from the case of F+=10, the secondary vortex can clearly be
seen (on the top left of the primary vortex). The rotation of
the secondary vortex is in the anti-clockwise direction,
opposite to the direction of the primary vortex.
4. CONCLUSION
A numerical study of vortex generators in a low speed flow
has been completed. The comparison of Reynolds stresses
for static VG between experimental and prediction results
showed a satisfactory agreement. The increase in the
spanwise averaged skin friction with the increase in reduced
frequency is clearly observed. The time averaged skin
friction distribution for oscillating SBVG is less spread
compared to the static SBVG. The results also show that an
increase in the reduced frequency induces secondary vortex
to appear.
ACKNOWLEDGEMENT
The author would like to thanks Universiti Sains Malaysia
for sponsoring the work (RU Grant No. 814042).
REFERENCES
Gad-el-hak. 2001. Flow control: The Future, Journal of
Aircraft 3 (38):
Gad-el-hak. 2000. Flow Control Passive, Active, and
Reactive flow management, Cambridge Univ. Press,
London.
Collis, S.S., Joslin, R.D., Seifert, A. and Theofilis, V. 2004.
Issues in active flow control: theory,control, simulation
and experiment, Progress in Aerospace Sciences 40:237-
289
Lin, J.C. 2002. Review of research on low-profile vortex
generators to control boundary layer separation, Progress
in Aerospace Sciences 38: 389-420
Kupper, C. and Henry, F.S. 2003. Numerical study of air-jet
vortex generators in a turbulent boundary layer, Applied
Mathematical Modelling: 359-377
Ekaterinaris, J.A. 2004. Prediction of a active flow control
performance on airfoils and wings, Aerospace Science
and Technology 8: 401-410
Shojaefard, M.H., Noorpoor, A.R., Avanesians, A. and
Ghaffarpour, M. 2005. Numerical Investigation of Flow
Control by Suction and Injection on a Subsonic Airfoil,
American Journal of Applied Sciences: 1474-1480
Coiro, D.P., Bellobuono, E. F. and Nicolos, F. 2008.
Improving aircraft endurance through turbulent
separation control by pulsed blowing, Journal of Aircraft,
3(45):
Guo, Y. 2008. Acoustic analysis of low-noise actuator
design for active flow control, Journal of sound and
Vibration :843-860
Kauertz, S. and Neuwerth. G. 2006. Excitation of
instabilities in the wake of an airfoil by means of active
winglets, Aerospace Science and Technology 10: 551-
562
Jolibois, J. and Moreau, M.F.E. 2008. Application of an AC
barrier discharge actuator to control airflow separation
above a NACA 0015 airfoil: Optimization of the
actuation location along the chord, Journal of
Electrostatic: 495-503
IeBeau, R.P., Reasor, D.A., Suzen, Y.B., Jacob, J.D. and
Huang, P.G. 2007. Unstructured Grid simulation of flow
separation control using plasma actuators,18th
AIAA
Computational Fluid Dynamics Conference, Florida
Benard, N., Jolibois, J. and Moreau, E. 2009. Lift and drag
performances of an axisymmetric airfoil controlled by
plasma actuator Journal of Electrostatic: 1-7
Martin, L. 2001. Experimental and Computational
Investigtaion of Sub-Boundary Layer Vortex Generators,
PhD Dissertation, Queen’s University of Belfast,
Northern Ireland
Pearcey, H.H. and Henry, F.S. 1994. Numerical model of
boundary layer control using air jet generated vortices,
AIAA Journal, 32 (12):
ANSYS FLUENT User’s Guide
Mamun, M.A.H., Tanim, T.R., Rahman, M.M., Saidur, R.
and Nagata, S. 2010. Mixed Convection Analysis in
Trapezoidal Cavity with a Moving Lid, International
Journal of Mechanical and Materials Engineering 5(1):
18-28