numerical of lubrication
TRANSCRIPT



NUMERICALCALCULATIONOF LUBRICATION


NUMERICALCALCULATIONOF LUBRICATIONMETHODS AND PROGRAMS
Ping Huang
South China University of Technology, Guangzhou, China

This ed ition first published 2013
# 2013 Tsinghua University Press. All rights re served.
Published by John Wiley & Sons Singapore Pte. Ltd., 1 Fusionopolis Walk, #07-01 Solaris South Tower, Singapore 138628,
under exclusive license by Tsinghua University Press in all medi a throughout the world excluding Mainland China and
excluding Simpli fied and Traditional Chinese lan guages.
For details of our global edi torial offices, for customer services and for information about how to apply for permi ssion to
reuse th e copyright material in this book please see our website at www.wiley.com.
All Rights Reserved. No part of this publication may be reproduced, stored in a retrieval system or transmitted, in any
form or by any means, electronic, mechanical, photocopying, recording, scanning, or otherwise, except as expressly
permitted by law, without either the prior written permi ssion of the Publisher, or authoriz ation through payment of the
appropriate photoc opy fee to the Copyright Cl earance Cente r. Requests for perm ission should be addressed to the Publisher,
John Wiley & Sons Singapore Pte. Ltd., 1 Fusionopolis Walk, #07-01 Solaris South Tower, Singapore 138628,
tel: 65-66438000 , fax: 65-66438008 , email: [email protected].
Wiley also publishes its books in a variety of electronic formats. Some content that appears in print may not be available in
electronic books.
Designations used by companies to distinguish their products are often claimed as trademarks. All brand names and
product names used in this book are trade names, service marks, trademarks or registered trademarks of their respective
owners. The Publisher is not associated with any product or vendor mentioned in this book. This publication is designed to
provide accurate and authoritative information in regard to the subject matter covered. It is sold on the understanding that
the Publisher is not engaged in rendering professional services. If professional advice or other expert assistance is required,
the services of a competent professional should be sought.
Limit of Liability/Disclaimer of Warranty: While the publisher and author have used their best efforts in preparing this
book, they make no representations or warranties with respect to the accuracy or completeness of the contents of this book
and specifically disclaim any implied warranties of merchantability or fitness for a particular purpose. It is sold on the
understanding that the publisher is not engaged in rendering professional services and neither the publisher nor the author
shall be liable for damages arising herefrom. If professional advice or other expert assistance is required, the services of a
competent professional should be sought.
Library of Congress Cataloging-in-Publication Data
Huang, Ping, 1957-
Numerical calculation of lubrication : methods and programs / Huang Ping.
pages cm
Includes bibliographical references and index.
ISBN 978-1-118-45119-9 (cloth)
1. Lubrication and lubricants—Mathematical models. I. Title.
TJ1077.H92 2013
621.8 09—dc23
2013014001
Set in 11/13 pt Times by Thomson Digital, Noida, India
1/2013
Contents
Preface xv
Part 1 NUMERICAL METHOD FOR REYNOLDS EQUATION 1
1 Reynolds Equation and its Discrete Form 31.1 General Reynolds Equation and Its Boundary Conditions 3
1.1.1 Reynolds Equation 3
1.1.2 Definite Condition 3
1.1.3 Computation of Lubrication Performances 5
1.2 Reynolds Equations for Some Special Working Conditions 6
1.2.1 Slider and Thrust Bearing 6
1.2.2 Journal Bearing 7
1.2.3 Hydrostatic Lubrication 8
1.2.4 Squeeze Bearing 9
1.2.5 Dynamic Bearing 9
1.2.6 Gas Bearing 10
1.3 Finite Difference Method of Reynolds Equation 10
1.3.1 Discretization of Equation 11
1.3.2 Difference Form of Reynolds Equation 12
1.3.3 Iteration of Differential Equation 13
1.3.4 Iteration Convergence Condition 13
2 Numerical Method and Program for Incompressible and SteadyLubrication of One-dimensional Slider 172.1 Basic Equations 17
2.1.1 Reynolds Equation 17
2.1.2 Boundary Conditions 18
2.1.3 Continuity Equation 18
2.2 Numerical Method for Incompressible and Steady Lubrication
of One-dimensional Slider 18
2.2.1 Discrete Reynolds Equation 19

2.3 Calculation Program for Incompressible and Steady Lubrication
of One-dimensional Slider 20
2.3.1 Introduction 20
2.3.2 Calculation Diagram 21
2.3.3 Calculation Program 21
2.3.4 Calculation Results 24
3 Numerical Method and Program for Incompressible and SteadyLubrication of Two-dimensional Slider 253.1 Basic Equations 25
3.2 Discrete Reynolds Equation 26
3.3 Calculation Program for Incompressible and Steady Lubrication
of Two-dimensional Slider 27
3.3.1 Introduction 27
3.3.2 Calculation Diagram 27
3.3.3 Calculation Program 28
3.3.4 Calculation Results 31
4 Numerical Method and Program for Incompressible and SteadyLubrication of Journal Bearing 334.1 Basic Equations 33
4.1.1 Axis Position and Clearance Shape 33
4.1.2 Reynolds Equation 34
4.2 Numerical Method for Incompressible and Steady Lubrication
of Journal Bearing 35
4.2.1 Dimensionless Reynolds Equation 35
4.2.2 Discrete Form of Reynolds Equation 36
4.3 Calculation Program for Incompressible and Steady Lubrication
of Journal Bearing 37
4.3.1 Calculation Diagram 37
4.3.2 Calculation Program 38
4.3.3 Calculation Results 40
5 Numerical Method and Program for IncompressibleSqueeze Lubrication 415.1 Basic Equation 41
5.2 Numerical Method and Program for Rectangular Plane Squeeze 42
5.2.1 Basic Equations 42
5.2.2 Numerical Method 42
5.2.3 Calculation Diagram 43
5.2.4 Calculation Program 44
5.2.5 Calculation Results 47
vi Contents

5.3 Numerical Method and Program for Disc Squeeze 47
5.3.1 Basic Equations 47
5.3.2 Numerical Method 48
5.3.3 Calculation Diagram 48
5.3.4 Calculation Program 49
5.3.5 Calculation Results 52
5.4 Numerical Method and Program for Journal Bearing Squeeze 52
5.4.1 Basic Equations 52
5.4.2 Numerical Method 54
5.4.3 Calculation Diagram 54
5.4.4 Calculation Program 55
5.4.5 Calculation Results 60
6 Numerical Method and Program for Dynamic Bearing 616.1 Basic Equations 61
6.2 Numerical Method for Trace of Journal Center 65
6.2.1 Introduction 65
6.2.2 Calculation Steps 66
6.3 Calculation Program for Dynamic Journal Bearing 67
6.3.1 Introduction 67
6.3.2 Calculation Diagram 67
6.3.3 Calculation Program 68
6.3.4 Calculation Results 82
7 Numerical Method and Program for Gas Lubrication 857.1 Basic Equations 85
7.1.1 General Reynolds Equation of Gas Lubrication 85
7.2 Numerical Method of Gas Lubrication 86
7.2.1 Basic Equations of Steady and Isothermal Gas Lubrication 86
7.2.2 Numerical Method 87
7.3 Calculation Program for Gas Lubrication 88
7.3.1 Calculation Program and Solutions of One-Dimensional
Gas Lubrication 88
7.3.2 Numerical Program and Solutions of Two-Dimensional
Gas Lubrication 91
7.3.3 Numerical Program and Solutions of Journal Bearing
Gas Lubrication 94
8 Numerical Method and Program for Rarefied Gas Lubrication 978.1 Basic Equations 97
8.2 Numerical Method of Rarefied Gas Lubrication 99
8.2.1 Rarefied Gas Lubrication Model 99
8.2.2 Treatment of the Ultra-Thin Gas Film Lubrication Equation 100
Contents vii

8.3 Discretization and Iteration of Modified Reynolds Equation 101
8.3.1 Discrete Equation 101
8.3.2 Iteration Method 101
8.4 Calculation Program for Rarefied Gas Lubrication of Slider 102
8.4.1 Procedures Introduction 102
8.4.2 Calculation Diagram 102
8.4.3 Calculation Program 102
8.4.4 Calculation Results 106
9 Numerical Method and Program for One-dimensionalGrease Lubrication 1079.1 Basic Equations 107
9.1.1 Introduction 107
9.1.2 Constitutive Equations of Grease 108
9.1.3 Reynolds Equation 109
9.2 Numerical Method of One-Dimensional Grease Lubrication 109
9.3 Calculation Program of One-Dimensional Grease Lubrication 110
9.3.1 Calculation Diagram 110
9.3.2 Calculation Program 111
9.3.3 Calculation Results 113
Part 2 NUMERICAL METHOD FOR ENERGY EQUATION 115
10 Energy Equation and its Discrete Form 11710.1 Basic Equations 117
10.1.1 Simplified Energy Equation 118
10.1.2 Boundary Conditions 118
10.1.3 Numerical Method 119
10.2 Influence of Temperature on Lubricant Performance 120
10.2.1 Viscosity–Temperature Equation 120
10.2.2 Density–Temperature Equation 120
10.3 Numerical Method for Thermal Hydrodynamic Lubrication 121
10.3.1 Methods and Program for One-dimensional Thermal
Hydrodynamic Lubrication 121
10.3.2 Numerical Method and Program for Two-dimensional
Thermal Hydrodynamic Lubrication 124
11 Numerical Method and Program for Incompressible and SteadyThermal Hydrodynamic Lubrication of Journal Bearing 13111.1 Basic Equations 131
11.1.1 Reynolds Equation 131
11.1.2 Energy Equation 132
viii Contents

11.1.3 Viscosity–Temperature Equation 132
11.2 Numerical Method 132
11.2.1 Discrete Reynolds Equation 132
11.2.2 Discrete Energy Equation 133
11.2.3 Temperature–Viscosity Equation 133
11.3 Calculation Program 133
11.3.1 Calculation Diagram 133
11.3.2 Calculation Program 134
11.3.3 Calculation Results 138
Part 3 NUMERICAL METHOD FOR ELASTICDEFORMATION AND THERMALELASTOHYDRODYNAMIC LUBRICATION 141
12 Numerical Method and Program for Elastic Deformation andViscosity–Pressure Equation 14312.1 Basic Equations of Elastic Deformation 143
12.1.1 Film Thickness Equation 143
12.1.2 Elastic Deformation Equation 143
12.2 Numerical Methods and Programs of Elastic Deformation 145
12.2.1 Numerical Method and Program of Elastic Deformation
Equation in Line Contact 145
12.2.2 Numerical Method and Program of Elastic Deformation
Equation in Point Contact 148
12.3 Viscosity–Pressure and Density–Pressure Equations 155
12.3.1 Viscosity–Pressure Relationship 155
12.3.2 Viscosity–Pressure–Temperature Relationship 156
12.3.3 Density–Pressure Relationship 156
13 Numerical Method and Program for EHL in Line Contact 15913.1 Basic Equations 159
13.2 Numerical Method 160
13.2.1 Dimensionless Equations 160
13.2.2 Discrete Equations 161
13.2.3 Iterative Method 162
13.2.4 Selection of Iterative Methods 163
13.2.5 Relaxation Factors 164
13.3 Calculation Program 164
13.3.1 Calculation Diagram 164
13.3.2 Calculation Program 165
13.3.3 Calculation Results 171
Contents ix
14 Numerical Method and Program for EHL in Point Contact 17314.1 Basic Equations 173
14.2 Numerical Method 174
14.2.1 Dimensionless Equations 174
14.2.2 Discrete Equations 175
14.3 Calculation Program 176
14.3.1 Calculation Diagram 176
14.3.2 Calculation Program 177
14.3.3 Calculation Results 186
15 Numerical Method and Program for Grease EHL in Line Contact 18715.1 Basic Equations 187
15.1.1 Reynolds Equation 187
15.1.2 Film Thickness Equation 187
15.1.3 Viscosity–Pressure Equation 188
15.1.4 Density–Pressure Equation 188
15.2 Numerical Method 188
15.2.1 Dimensionless Equations 188
15.2.2 Discrete Equations 189
15.3 Calculation Program 189
15.3.1 Calculating Diagram 189
15.3.2 Calculation Program 190
15.3.3 Calculation Results 199
16 Numerical Method and Program for Grease EHL in Point Contact 20116.1 Basic Equations 201
16.1.1 Reynolds Equation 201
16.1.2 Film Thickness Equation 201
16.1.3 Elastic Deformation Equation 202
16.1.4 Viscosity–Pressure Equation 202
16.1.5 Density Equation 202
16.2 Numerical Method 202
16.2.1 Dimensionless Equations 202
16.2.2 Discrete Equations 203
16.3 Calculation Program 204
16.3.1 Calculation Diagram 204
16.3.2 Calculation Program 205
16.3.3 Calculation Results 214
17 Numerical Method and Program for Thermal EHL in Line Contact 21517.1 Basic Equations 215
17.1.1 Reynolds Equation 215
x Contents

17.1.2 Energy Equation 215
17.1.3 Film Thickness Equation 216
17.1.4 Elastic Deformation Equation 216
17.1.5 Roelands Viscosity–Pressure–Temperature Equation 216
17.1.6 Density–Pressure–Temperature Equation 217
17.2 Numerical Method 217
17.2.1 Dimensionless Equations 217
17.2.2 Discrete Equations 218
17.3 Calculation Program 220
17.3.1 Calculation Diagram of Multigrid Method 220
17.3.2 Calculation Diagram of Temperature 221
17.3.3 Calculation Program 222
17.3.4 Calculation Results 236
18 Numerical Method and Program for Thermal EHL in Point Contact 23718.1 Basic Equations 237
18.1.1 Reynolds Equation 237
18.1.2 Energy Equation 237
18.1.3 Film Thickness Equation 238
18.1.4 Elastic Deformation Equation 238
18.1.5 Roelands Viscosity–Pressure–Temperature Equation 239
18.1.6 Density–Pressure–Temperature Equation 239
18.2 Numerical Method 239
18.2.1 Dimensionless Equations 239
18.2.2 Discrete Equations 241
18.3 Calculation Program 242
18.3.1 Calculation Diagram 242
18.3.2 Calculation Program 242
18.3.3 Calculation Results 261
19 Numerical Method and Program for Thermal GreaseEHL in Line Contact 26319.1 Basic Equations 263
19.1.1 Reynolds Equation 263
19.1.2 Energy Equation 264
19.1.3 Film Thickness Equation 264
19.1.4 Elastic Deformation Equation 265
19.1.5 Viscosity–Pressure–Temperature Equation 265
19.1.6 Density–Pressure–Temperature Equation 265
19.2 Numerical Method 265
19.2.1 Dimensionless Equations 265
19.2.2 Discrete Equations 267
Contents xi

19.3 Calculation Program 268
19.3.1 Calculation Diagram 268
19.3.2 Calculation Program 268
19.3.3 Calculation Results 287
20 Numerical Method and Program for Thermal Grease EHLin Point Contact 28920.1 Basic Equations 289
20.1.1 Reynolds Equation 289
20.1.2 Energy Equation 290
20.1.3 Film Thickness Equation 290
20.1.4 Elastic Deformation Equation 291
20.1.5 Roelands Viscosity–Pressure–Temperature Equation 291
20.1.6 Density–Pressure–Temperature Equation 291
20.2 Numerical Method 291
20.2.1 Dimensionless Equations 291
20.2.2 Discrete Equations 293
20.3 Calculation Program 294
20.3.1 Calculation Diagram 294
20.3.2 Calculation Program 295
20.3.3 Calculation Results 310
Part 4 CALCULATION PROGRAMS FOR LUBRICATIONANALYSIS IN ENGINEERING 311
21 Lubrication Calculation Program for Herringbone Grooved JournalBearing of Micro Motor 31321.1 Basic Theory of Lubrication Calculation of Herringbone
Groove Bearing 313
21.1.1 Journal Center Position and Film Thickness 313
21.1.2 Reynolds Equation 314
21.1.3 Boundary Conditions 315
21.1.4 Flux Calculation 316
21.1.5 Temperature Calculation 316
21.2 Program for Performance Calculation 318
21.2.1 Lubrication Performances 318
21.2.2 Calculation Program 318
21.3 Calculation Results 326
21.4 Instruction for HBFA Software Package 332
21.4.1 Package Contents 332
21.4.2 Program Installation 332
21.4.3 Program Operation 333
xii Contents

22 Lubrication Optimization Program of Herringbone GroovedJournal Bearing of Micro Motor 33722.1 Method of Optimization Calculation 337
22.1.1 Requirements of Parameter Optimization 337
22.1.2 Optimization Model 337
22.1.3 Optimization Methods and Steps 338
22.2 Program Layout of Optimization Calculation 338
22.2.1 Optimization Program Diagram 338
22.2.2 Calculation Program 339
22.2.3 Parameters in Program 352
22.3 Optimization Calculation Examples 352
22.3.1 Example 1: Optimization Calculation for Static Load 352
22.3.2 Example 2: Optimization Calculation for Static Flux
(Eccentricity Ratio e is Constant) 354
22.3.3 Example 3: Optimization Calculation for Static Flux
(Load W is Constant) 354
22.3.4 Example 4: Optimization Calculation for Dynamic Load 354
22.3.5 Example 5: Optimization Calculation for Dynamic Flux
(Eccentricity e is Constant) 354
22.3.6 Example 6: Optimization Calculation for Dynamic
Flux (Load W is Constant) 355
22.4 Instructions for HBOA Software Package 355
22.4.1 Program Package 355
22.4.2 Program Execution 356
23 Calculation Program for Gas Lubrication of Hard Disk/Headin Ultra Thin Film 36123.1 Basic Equations of Gas Lubricating Film of Hard Disk/Head 361
23.1.1 Basic Equations 361
23.1.2 Gas Film Thickness 362
23.1.3 Poiseuille Flow Rate 362
23.2 Discrete Equation and Special Treatments 363
23.2.1 Iterative Scheme Considering High Bearing Numbers 363
23.2.2 Abrupt Changes between Steps on ABS 364
23.3 Calculation Program 364
23.3.1 Calculation Diagram 364
23.3.2 Calculation Program 366
23.3.3 Calculation Results 371
24 Calculation Program of Flight Attitude of Magnetic Head 37324.1 Search Strategy for Flight Attitude 373
24.2 Calculation Program 375
Contents xiii

24.2.1 Program Introduction 375
24.2.2 Calculation Diagram 376
24.2.3 Calculation Program 376
24.2.4 Calculation Results 386
References 389
Index 391
xiv Contents

Preface
Lubrication calculation is the most successful area of tribology, using mathematical
methods to obtain numerical solutions. Due to the development of computer science
in the recent half a century, it has made remarkable achievements.
However, most books on tribology mainly introduce theories or calculation
methods of lubrication. They rarely give and discuss numerical calculation programs.
Not only is this inconvenient for research or the production of practical lubrication,
but also many similar programming tasks have to be carried out repeatedly.
Furthermore, because of the limitations of lubrication theory, some numerical
calculation programs may give mistaken solutions, leading to wrong conclusions.
This book is different from previous theoretical books or monographs on lubrica-
tion; it mainly introduces the numerical calculation programs of lubrication. This is
the main feature of the book. Some of the programs have been used for many years in
lubrication calculations and research by the author.
Due to the complexity of lubrication problems, the book mainly focuses on how to
numerically solve the Reynolds equation, energy equation, elastic deformation
equation and their combinations. The analyzed lubrication problems include line,
surface and point contacts, which correspond to thrust bearings, journal bearings and
rolling contact bearings. Furthermore, the working conditions include incompressible,
compressible, nonthermal, thermal, isoviscosity, variable viscosity, Newtonian fluid,
non-Newtonian fluid (only grease), rigid and elastic deformation situations.
The book is divided into four parts, covering 24 chapters:
The first part (Chapters 1–9) is about the solution of theReynolds equation,which is the
basic technique for the numerical analysis of lubrication. The contents include the
boundary and connection conditions of the Reynolds equation, discretizing the Reynolds
equation, numerical methods and programs of slider lubrication, numerical methods and
programs of journal bearing lubrication, numerical methods and programs of dynamic
bearing lubrication, numerical methods and programs of gas lubrication (especial
magnetic hard disk/head) and so on. In this part,we also discuss the rheologyof lubricants.
As an example, grease lubrication is discussed, which is a kind of non-Newtonian fluid.
The second part of the book (Chapters 10 and 11) is on temperature calculation.
First, we give a discrete form of the energy equation and the temperature–viscosity

equation. Then, combining the Reynolds equation and the energy equation, we give
numerical methods and programs of thermal hydrodynamic lubrication.
Elastohydrodynamic lubrication (EHL) is a difficult topic in lubrication calcula-
tion, because of its poor convergence. In the third part (Chapters 12–20), calculations
of elastic deformation equations for line and point contacts are given first. Then,
combined with the Reynolds equation, the pressure–viscosity equation and the elastic
deformation equation, calculation programs of EHL are introduced in detail.
Furthermore, combined with the energy equation, numerical methods and programs
of thermal EHL are given. We also give numerical methods and programs of EHL and
thermal EHL for grease in this part, and we consider the rheological effect.
Finally, in the last part of the book (Chapters 21–(24), we introduce some programs
developed for practical lubrication design. These programs include a lubrication
calculation package and its optimized design package for the herringbone groove
bearing of a micro motor and a calculation program and balancing attitude program of
ultra thin gas lubrication for magnetic hard disk/head design. Because these packages
and programs have some special requirements, pre-treatment and post-treatment have
been added for easy usage in engineering. Although the basic theories of these
contents are introduced at the front of the book, more details about the function and
usages of the packages and programs can be found on the Wiley CompanionWebsite:
www.wiley.com/go/huang/lubrication.
The reason whywe provide all source codes and an attached source code disc for all
the programs is that most users need not repeat programming tasks even if they have
well mastered the principles of lubrication. Especially, thosewho are not familiar with
lubrication analysis can directly use the programs to carry out lubrication calculation.
If some users have enough lubrication knowledge, they can use the programs or need
only rewrite the pre-assignment or data sentences to input the different parameters to
solve their own lubrication problems more easily. This will bring great convenience
for researchers and technical staff in this field.
The book is mainly aimed at teachers, post-graduate students and doctoral students
at colleges and universities. It can also be used as a reference book for technical
personnel and research staff in engineering.
I would like to thank all of my post-graduate students who participated in the
program writing and debugging and the book writing. Among them, I thank Li Ping
for Chapters 2 and 3, Sun Zhonghua for Chapters 5 and 6, Niu Rongjun for Chapter 8,
Wang Qiliang, Glenn and Liu Ping for Chapters 10 and 11,Wang Yazhen for Chapters
12–14, Yu Mei for Chapters 15 and 19, Lai Tianmao for Chapters 16 and 20, Yao
Huaping for Chapters 21 and 22, and Wang Hongzhi for Chapters 23 and 24.
Ping Huang
South China University of Technology
31 August, 2012
xvi Preface
Part One
Numerical Methodfor ReynoldsEquation


1
Reynolds Equation andits Discrete Form
1.1 General Reynolds Equation and Its Boundary Conditions
1.1.1 Reynolds Equation
The general form of the Reynolds equation is
@
@x
rh3
h� @p@x
� �þ @
@y
rh3
h� @p@y
� �¼ 6
@
@xUrhð Þ þ @
@yVrhð Þ þ 2
@rh
@t
� �(1.1)
where U¼U0–Uh; V¼V0–Vh. If we assume that the fluid density does not change
with time, we have@rh
@t¼ rðwh � w0Þ.
1.1.2 Definite Condition
The definite conditions of the Reynolds equation usually include the boundary
conditions, the initial conditions and the connection conditions.
1.1.2.1 Boundary Condition
In order to solve the Reynolds equation, the pressure boundary conditions should be
used to determine the integration constants. There are commonly two forms of
pressure boundary conditions, namely
Coercive boundary condition pjs ¼ 0
Natural boundary condition@p
@n
����s
¼ 0
Numerical Calculation of Lubrication: Methods and Programs, First Edition. Ping Huang.� 2013 Tsinghua University Press. All rights reserved. Published 2013 by John Wiley & Sons Singapore Pte. Ltd.

where s is the boundary of the solution domain; and n is the normal direction of the
border.
Usually, the inlet and outlet pressure boundaries for an oil film can be easily
determined according to its geometry and the situation of the oil supply. However,
such as a journal bearing which has both a convergence clearance and a divergence
clearance, the position of the outlet cannot be determined in advance. Therefore, it
can be assumed that both pressure and pressure derivative are equal to zero at the same
time to determine the location of the outlet. Such a boundary condition is known as
the Reynolds boundary condition, which is in this form
pjs ¼ 0 and@p
@n
����s
¼ 0
Here are two examples of boundary conditions.
One-dimensional boundary conditions in the region of 0� x� l
If the boundaries are known, we have pjx¼0 ¼ 0 and pjx¼l ¼ 0.
If the outlet is unknown, we have pjx¼0 ¼ 0, pjx¼x0 ¼ 0 and@p
@x
����x¼x0
¼ 0, where
x0 is the outlet boundary to be determined.
Two-dimensional boundary conditions in the rectangular area of (0� x� l,
�b/2� y� b/2)
If the boundaries are known, we have pjx¼0 ¼ 0, pjx¼l ¼ 0 and pjy¼�b=2 ¼ 0.
If the outlet is unknown, we have pjx¼0 ¼ 0, pjx¼x0 ¼ 0,@p
@x
����x¼x0
¼ 0 and
pjy¼�b=2 ¼ 0.
1.1.2.2 Initial Condition
For the nonsteady-state lubrication problem in which the velocity and/or the load
change with time, such as the fluid hydrodynamic lubrication of a crankshaft bearing
in the internal combustion engine, the Reynolds equation contains the squeeze term at
the right end of Equation 1.1. The lubrication film thickness changes with time, so we
need to give some initial conditions for solving the Reynolds equation. The general
forms of the initial condition are as follows.
Initial film thickness: hjt¼0 ¼ h0ðx; yÞInitial pressure: pjt¼0 ¼ p0ðx; yÞ
If the lubricant viscosity and density also vary with time, their initial conditions
should also be given.
4 Numerical Calculation of Lubrication
1.1.2.3 Connection Condition
If the film thickness varies abruptly in several parts, like a ladder, the lubrication region
also needs to divide into several subregions to solve the problem because the film
thickness derivatives at the right end of Equation 1.1 do not exist at the abruptly
changing positions. Therefore, the connection conditions should be given. The com-
monly used connection conditions are the continuity conditions of pressure and flow. If
a film thickness changes abruptly at x0, its connection conditions will be as follows.
Continuous pressure condition: pjx¼x0�0 ¼ pjx¼x0þ0
Continuous flow condition: Qjx¼x0�0 ¼ Qjx¼x0þ0
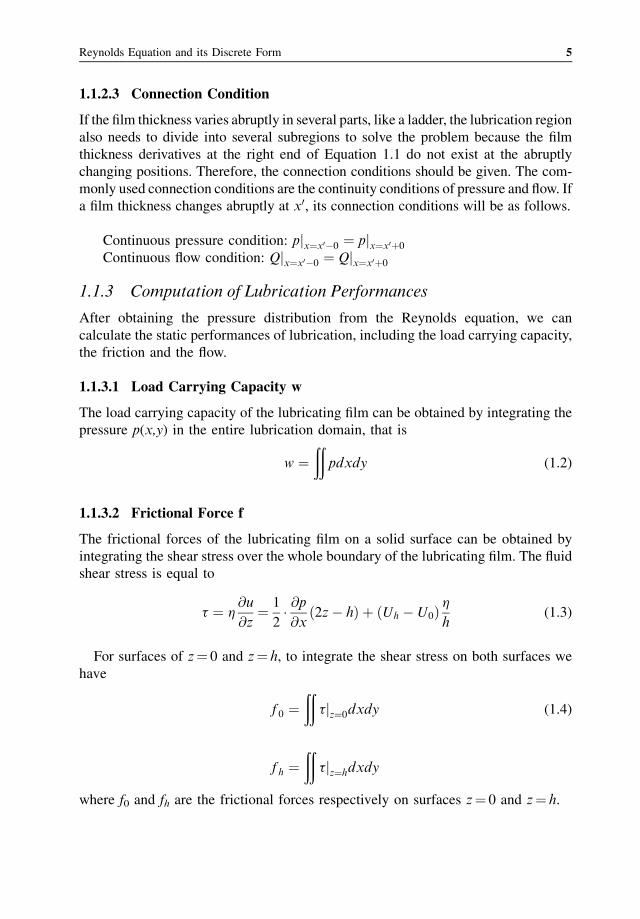
1.1.3 Computation of Lubrication Performances
After obtaining the pressure distribution from the Reynolds equation, we can
calculate the static performances of lubrication, including the load carrying capacity,
the friction and the flow.
1.1.3.1 Load Carrying Capacity w
The load carrying capacity of the lubricating film can be obtained by integrating the
pressure p(x,y) in the entire lubrication domain, that is
w ¼ðð
pdxdy (1.2)
1.1.3.2 Frictional Force f
The frictional forces of the lubricating film on a solid surface can be obtained by
integrating the shear stress over the whole boundary of the lubricating film. The fluid
shear stress is equal to
t ¼ h@u
@z¼ 1
2� @p@x
2z� hð Þ þ Uh � U0ð Þ hh
(1.3)
For surfaces of z¼ 0 and z¼ h, to integrate the shear stress on both surfaces we
have
f 0 ¼ðð
tjz¼0dxdy (1.4)
f h ¼ðð
tjz¼hdxdy
where f0 and fh are the frictional forces respectively on surfaces z¼ 0 and z¼ h.
Reynolds Equation and its Discrete Form 5

After the frictional forces have been obtained, we then can determine the friction
coefficientm¼ f/w as well as the frictional power loss and the heat due to the friction.
1.1.3.3 Lubricant Flow Q
The side leaking flows of lubricant can be obtained by integrating the flow rates
through the lubricating film boundary.
Qx ¼Ðqxdy
Qy ¼Ðqydx
(1.5)
By summing all leaking flows over all boundaries we can obtain the total flow,
which gives us the amount of lubricant needed to fill the clearance. At the same time,
the total leaking flow will influence the extent of convection so that we can calculate
the balanced thermal temperature according to leaking flow and friction power loss.
1.2 Reynolds Equations for Some Special Working Conditions
In Section 1.1, we have given the general form of the Reynolds equation. However, for
some specific engineering problems, the general Reynolds equation can be simplified,
which may make solving much easier. In the following, some forms of the Reynolds
equation for different conditions are given.
1.2.1 Slider and Thrust Bearing
Awedge slider is the simplest problem of lubrication design. If the geometry of the
slider is not very complicated, we can obtain an analytical solution. In addition,
through analysis of the slider problem, it will not only help us to understand the basic
characteristics of lubrication, but will also be useful for the thrust bearing lubrication
design.
Because the side leakage of lubricant need not be considered for solving an
infinitely wide slider, its Reynolds equation then can be simplified into a one-
dimensional ordinary differential equation:
d
dxh3
dp
dx
� �¼ 6Uh
dh
dx(1.6)
The common two-pressure boundary conditions of a slider are as follows.
pjx¼0 ¼ 0; pjx¼x0 ¼ 0 (x0 is the outlet boundary, x0 ¼ b; and b is the slider width).
pjx¼0 ¼ 0; pjx¼x0 ¼ 0 and@p
@x
����x¼x0
¼ 0 (x0 is the outlet boundary to be deter-
mined, x0 � b).
6 Numerical Calculation of Lubrication

If the film thickness or its derivative is discontinuous, we should divide the
lubrication region into two parts at the discontinuous line so that the number of the
integral constants will correspondingly increase. Therefore, the connection conditions
must be used at the discontinuous line. If the discontinuous line is at x�, the connectionconditions will be:
Pressure continuous condition pjx¼x��0 ¼ pjx¼x�þ0 (1.7)
Flow continuous condition
� h3
12h
@p
@xþ ðU1 þ U2Þ h
2
� �x¼x��0
¼ � h3
12h
@p
@xþ ðU1 þ U2Þ h
2
� �x¼x�þ0
(1.8)
1.2.2 Journal Bearing
By spreading the journal bearing along the circumferential direction, we can
transform x into Ru so that the general form of the Reynolds equation is
@
R2@u
rh3
h� @p@u
� �þ @
@y
rh3
h� @p@y
� �¼ 6
@
R@uUrhð Þ þ @
@yVrhð Þ þ 2
@rh
@t
� �: (1.9)
The corresponding shape of the clearance can be expressed as:
h ¼ ecosu þ c ¼ cð1þ e cosuÞ (1.10)
where e is the eccentricity, c is the clearance of the radii of the bearing and the journal,
e¼ e/c is the eccentricity ratio and u is the circumferential coordinate starting from
the maximum film thickness position.
1.2.2.1 Infinitely Narrow Bearing
If the axial width of a bearing along the y direction is much less than the
circumferential length along the x direction, we have@p
@y� @p
R@uso that we can
set@p
R@u¼ 0. Because the film thickness h is only related to u, but independent of y, the
Reynolds equation becomes
d
dyh3 � dp
dy
� �¼ 6Uh
dh
Rdu(1.11)
Reynolds Equation and its Discrete Form 7

The above Reynolds equation has only side boundary conditions. They are p¼ 0
at y ¼ � b
2and
dp
dy¼ 0 at y¼ 0 due to symmetry.
1.2.2.2 Infinitely Wide Bearing
We can approximately choosedp
dy¼ 0 for an infinitely wide bearing because the side
leakage can be ignored. Therefore, the Reynolds equation changes into an ordinary
differential equation.d
Rduh3
dp
Rdu
� �¼ 6Uh
dh
Rdu(1.12)
Its boundary conditions usually are pju¼0 ¼ 0, pju¼u2¼ 0 and
@p
@u
����u¼u2
¼ 0 (where
u2 is the outlet boundary to be determined, u2� 2p).
1.2.3 Hydrostatic Lubrication
The oil film for hydrostatic lubrication is formed by a fluid forced in under pressure
from the outside. Therefore, even if two lubricating surfaces have no relative motion,
a thick enough lubricating film can be achieved. The advantages of hydrostatic
lubrication are: (1) its load carrying capacity and the oil film thickness have no
relationship with the sliding velocity; (2) the film stiffness is so strong that it has a
very high accuracy; (3) its friction coefficient is so low that we can ignore the
influence of the static friction. The main disadvantages of hydrostatic lubrication are:
its structure is complex and a pressure oil supply systemmust be required which often
affects the working life and reliability of hydrostatic lubrication.
Substituting the condition of no relative sliding velocity into the Reynolds
Equation 1.1, we have the Reynolds equation for hydrostatic lubrication as follows
@
@x
rh3
h
@p
@x
� �þ @
@y
rh3
h
@p
@y
� �¼ 0 (1.13)
For a rectangular region, the outer pressure boundary conditions are usually
pjx¼0 ¼ 0; pjx¼l ¼ 0; pjy¼�b=2 ¼ 0; and the boundary pressure condition in the oil
chamber is: p¼ ps, where ps is the supplied oil pressure.
For a journal hydrostatic bearing, Reynolds Equation 1.13, the film thickness
equation and the boundary conditions can be solved easily in the form of cylindrical
coordinates. For solving the above equations, we can determine the variation
relationship between the load and the film thickness. Furthermore, if we consider
the working conditions, such as equal film thickness, incompressibility or isovis-
cosity, the Reynolds Equation 1.13 can be further simplified.
8 Numerical Calculation of Lubrication

1.2.4 Squeeze Bearing
The relative sliding between two bearing surfaces is usually assumed to be zero when
analyzing squeeze lubrication, so that the Reynolds Equation 1.1 can be written as
follows
@
@xrh3
@p
@x
� �þ @
@yrh3
@p
@y
� �¼ 12h
@ðrhÞ@t
(1.14)
Usually, for a rectangular region, the boundary conditions are pjx¼0 ¼ 0; pjx¼l ¼ 0;
and pjy¼�b=2 ¼ 0. To solve the above equation we can determine the variation
relationship between the load and the film thickness.
1.2.5 Dynamic Bearing
Most actual bearings withstand a varying load whose direction, rotational speed or
other parameters change with time. Such bearings are collectively referred to as
dynamic bearing or nonstable load bearing. Obviously, the axis or the thrust plate of a
dynamic bearing moves along a certain trajectory. If the working parameters are
periodic functions of time, the trajectory of the axis is a complex and closed curve.
The working principles of the dynamic bearing can be divided into two types. The
first is where the journal does not rotate around its central axial, that is, there is no
relative sliding. Therefore, the journal axial moves along a certain trajectory under the
load. In this case, the journal and the bearing surfaces move mainly in the direction of
the film thickness so that the film pressure is generated by the squeeze effect. The
other type is where the journal rotates around its own center and the journal center
also moves. Therefore, the film pressure originates from the squeeze effect of these
two movements, that is, the journal rotation and the axis movement.
The general Reynolds equation for incompressible and dynamic lubrication is the
basic equation to analyze dynamic bearings. It can be written as follows
@
@x
h3
h
@p
@x
� �þ @
@y
h3
h
@p
@y
� �¼ 6U
@h
@xþ 12W (1.15)
In Equation 1.15 the first term on the right is the hydrodynamic effect; the second
term represents the squeeze effect; and when the Reynolds Equation 1.15 is applied
to a stable bearing, the term of the squeeze effect can be omitted, that is,
W ¼ wh � w0 ¼ @h
@t¼ 0:
The problemof calculating the axis trajectory of a dynamic bearing byEquation 1.15
belongs to an initial value problem. The stepping method is usually used to determine
the axis of the trajectory according to the given initial position of the axis.
Reynolds Equation and its Discrete Form 9

1.2.6 Gas Bearing
The main feature of gas lubrication is that a gas is compressible. Therefore, the
density of the gas must be treated as a variable, that is, by using the Reynolds equation
for a variable density
@
@x
rh3
h
@p
@x
� �þ @
@y
rh3
h
@p
@y
� �¼ 6 U
@ðrhÞ@x
þ 2@ðrhÞ@t
� �(1.16)
Because the gas density varies with temperature and pressure, the ideal gas
equation can be expressed as follows
p
r¼ RT (1.17)
where T is the absolute temperature, and R is the gas constant which does not change
for a certain gas.
For a usual gas lubrication problem, gas lubrication can be regarded as an
isothermal process and this assumption has an error less than a few percent. For
such a problem, Equation 1.15 becomes
p ¼ kr (1.18)
where k is a proportional constant.
In addition, if a gas lubrication process is so fast that the heat cannot be conducted
in time, the process can be thought to be adiabatic. The gas state equation of the
adiabatic process is as follows
p ¼ krn (1.19)
where n is the gas specific heat ratio relate to the atomic number of the gas molecules.
For air, n¼ 1.4.
For an isothermal process, the Reynolds equation becomes
@
@xh3p
@p
@x
� �þ @
@yh3p
@p
@y
� �¼ 6h U
@
@xðphÞ þ 2
@
@tðphÞ
� �(1.20)
Equation 1.20 is the basic equation for solving gas lubrication problems.
1.3 Finite Difference Method of Reynolds Equation
If the boundary conditions are given for solving a differential equation, this is known
as a boundary value problem. In hydrodynamic lubrication calculations, the finite
difference method is commonly used to numerically solve the Reynolds equation. The
major steps of finite difference method are as follows.
10 Numerical Calculation of Lubrication
1.3.1 Discretization of Equation
First, change the partial differential equations into dimensionless forms. This is
accomplished by expressing the variables in a universal form.
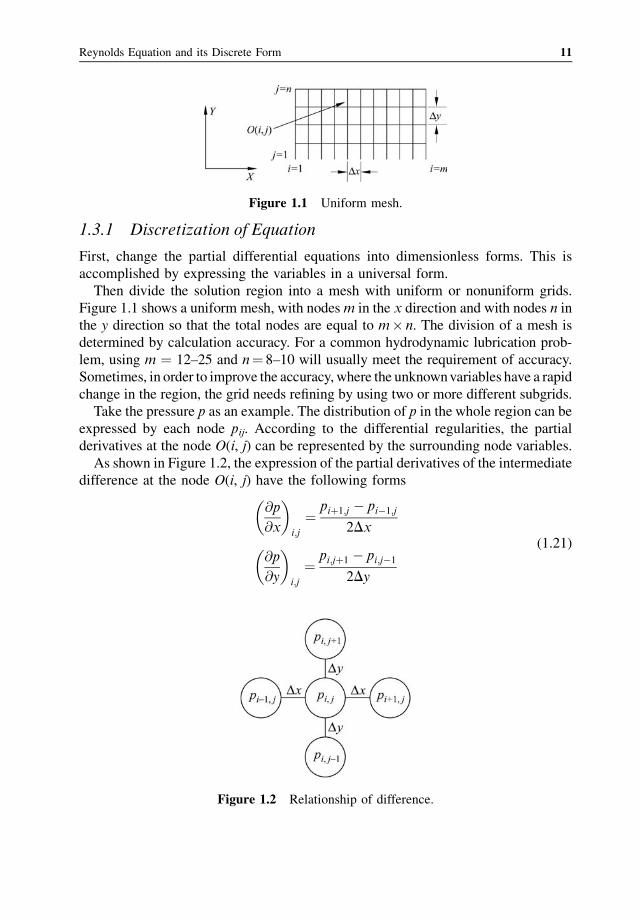
Then divide the solution region into a mesh with uniform or nonuniform grids.
Figure 1.1 shows a uniform mesh, with nodesm in the x direction and with nodes n in
the y direction so that the total nodes are equal to m� n. The division of a mesh is
determined by calculation accuracy. For a common hydrodynamic lubrication prob-
lem, using m ¼ 12–25 and n¼ 8–10 will usually meet the requirement of accuracy.
Sometimes, in order to improve the accuracy, where the unknownvariables have a rapid
change in the region, the grid needs refining by using two or more different subgrids.
Take the pressure p as an example. The distribution of p in the whole region can be
expressed by each node pij. According to the differential regularities, the partial
derivatives at the node O(i, j) can be represented by the surrounding node variables.
As shown in Figure 1.2, the expression of the partial derivatives of the intermediate
difference at the node O(i, j) have the following forms
@p
@x
� �i;j
¼ piþ1;j � pi�1;j
2Dx
@p
@y
� �i;j
¼ pi;jþ1 � pi;j�1
2Dy
(1.21)
Figure 1.1 Uniform mesh.
Figure 1.2 Relationship of difference.
Reynolds Equation and its Discrete Form 11

The second-order partial derivatives of the intermediate difference are as follows
@2p
@x2
� �i;j
¼ piþ1;j þ pi�1;j � 2pi;j
ðDxÞ2
@2p
@y2
� �i;j
¼ pi;jþ1 þ pi;j�1 � 2pi;j
ðDyÞ2(1.22)
In order to obtain the unknown variables near the border, forward or backward
difference formulas are used as follows
@p
@x
� �i;j
¼ piþ1;j � pi;j
Dx
@p
@y
� �i;j
¼ pi;jþ1 � pi;j
Dy
(1.23)
@p
@x
� �i;j
¼ pi;j � pi�1;j
Dx
@p
@y
� �i;j
¼ pi;j � pi;j�1
Dy
(1.24)
Usually, the accuracy of the intermediate difference is high. The following
intermediate difference formulas can also be used in calculation
@p
@x
� �i;j
¼ piþ1=2;j � pi�1=2;j
Dx(1.25)
1.3.2 Difference Form of Reynolds Equation
According to the above formulas, the two-dimensional Reynolds equation can be
written in a standard form of the second-order partial differential equation
A@2p
@x2þ B
@2p
@y2þ C
@p
@xþ D
@p
@y¼ E (1.26)
where A, B, C, D and E are known parameters.
Equation 1.26 can be applied to each node. According to Equations 1.21 and 1.22,
the relationship of pressure pi,j at node O(i,j) with the adjacent pressures can be
written as follows
~pki;j ¼ CNpki;jþ1 þ CSp
kþ1i;j�1 þ CEp
kiþ1;j þ CWp
kþ1i�1;j þ G (1.27)
where, p with superscript k is the original pressure, and with superscript kþ1 is the
iterated one; and
12 Numerical Calculation of Lubrication