numerical and computational analysis of hydrodynamic ... · numerical and computational analysis of...
TRANSCRIPT
16 Numerical and computational analysis of hydrodynamic effects in the micro-hydro power station
NUMERICAL AND COMPUTATIONAL ANALYSIS OF HYDRODYNAMIC EFFECTS IN THE MICRO-HYDRO
POWER STATION
Assoc.prof.dr. V. Bostan Technical University of Moldova
INTRODUCTION Among clean and non-pollutant energy
sources, kinetic energy of the flowing rivers is of great importance due to the enormous energy potential. This assertion stands for the vast majority of rivers with large and medium size discharge. Strong public opposition to large scale hydro-electrical power plants caused by large environmental and social costs (from damming of rivers and flooding of large tracts of fertile land to the displacement of people from the affected areas and disrupted fish migration) is making the small scale hydro-electric power plants more appealing, especially for the potential consumers in remote rural areas. Micro-hydro-electric power plants are being used on a large scale as decentralized energy sources. Renewed interest for such stations started worldwide in recent decade.
Decentralized systems for conversion of the kinetic energy of the free water flow into electric or mechanical energy are using turbines in the absence of dams. The kinetic energy of free water flow is a recommended energy source available 24 hours per day and it can be efficiently harnessed by micro-hydro power stations. As working elements in such small-scale hydro-electric power stations are used Garman type rotors with oblique axis blades, Darrieus rotors, multi-blade rotors, Gorlov type turbines. There are two types of micro-hydro power stations without dams:
− anchored micro-hydro power stations; − floating micro-hydro power stations.
The anchored power station requires a foundation to which the working elements, multiplicator and electric generator placed on a resistance frame are anchored. In contrast with anchored power stations, the floating micro-hydro power stations can be placed in the areas with higher flow rate and at further distances from the river banks. Moreover, they can be grouped and positioned appropriately to form a hydro power farm in order to convert more efficiently the flowing river kinetic energy. Nowadays, various types of
floating micro-hydro power stations are being used with either horizontal or vertical axis.
Research and elaboration of the systems for conversion of renewable sources of energy (RSE) as a research objective, present interest and importance and it is in complete agreement with: European Union Strategy exposed in the White Book, commitments of the Republic of Moldova toward the increase of the RSE quote in the energy production up to 20% in 2020. The proposed innovations followed from a complex theoretical and experimental research in the context of which the rotor's geometrical, functional and constructive parameters have been argued and in a specialized laboratory with modern equipment the blade's fabrication technology using composite materials have been validated.
2. DETERMINATION OF HYDRODYNAMIC COEFFICIENTS
CL AND CM
Consider the symmetrical profile of the blade placed in a uniform water stream with velocity V ∞ (fig. 1). In the fixing point O' of the symmetrical blade with lever OO′ let consider three coordinate systems, namely: the O'xy system with axis O'y oriented in the direction of the velocity vector V ∞ , and axis O'x normal to this direction; the O'x′y′ system with axis O'y′ oriented along the lever direction OO', and axis O'x′ normal to this direction, and finally the O'x''y'' system with axis O'x'' oriented along the profile’s chord toward the trailing edge and axis O'y'' normal to this direction . Points A and B correspond to the trailing and the leading edges, respectively. The angle of attack α is the angle between the profile’s chord AB and the direction of the velocity vector V ∞ , and the positioning angle φ is the angle formed by the velocity vector direction and lever OO'.
The hydrodynamic force F has its components in directions O'x and O'y, named the lift and drag forces, respectively given by:

Numerical and computational analysis of hydrodynamic effects in the micro-hydro power station 17
Figure 1. Hydrodynamic profile blade.
21 ,2L L pF C V Sρ ∞= (1)
21 ,2D D pF C V Sρ ∞= (2)
where ρ is the fluid density, V∞ is the flow velocity, Sp=ch (c is the length of chord AB, and h is the blade height) represents the lateral surface area of the blade, and CL and CD are dimensionless hydrodynamic coefficients, called the lift coefficient and drag coefficient. The hydrodynamic coefficients CL and CD are functions of the angle of attack α, the Reynolds number Re and the hydrodynamic shape of the blade profile. The pitching moment, is computed according to formula
21 ,2 M pM C V cSρ ∞= (3)
where CM is the hydrodynamic moment coefficient.
The shape of the hydrodynamic profile is chosen from the library of NACA 4 digits aerodynamic profiles. The standard NACA 4 digit profiles are characterized by three shape parameters measured in percents of the chord’s length: maximum value of camber Cmax, location of the maximum camber xC,max and maximum thickness Gmax. The profile coordinates are obtained by combining the camber line and the distribution of thickness [1]. Since the considered blades will have a symmetric shape, the camber is null (Cmax=0, xC,max=0) and the camber line will coincide with x-axis.
For simplicity, the profile chord length is considered unitary. Initially, the fluid is considered incompressible and inviscid, and its flow–plane and potential [3,4]. In the case of an incompressible plane potential flow the velocity components ( ),V u v= in point P(x,y) are given by the relations:
( , ) ,u x yx
∂Φ=∂
( , ) ,v x yy
∂Φ=∂
(4)
where potential Ф is obtained by superposition of a uniform velocity flow and a distribution of sources and vortexes on the profile C. Thus, the potential is
,S V∞Φ = Φ +Φ +Φ (5)
where the uniform flow potential is given by
cos sin ,V x V yα α∞ ∞ ∞Φ = + (6)
the potential of the source distribution with strength q(s) is
( ) ln( ) ,2S
C
q s r dsπ
Φ = ∫ (7)
and the potential of vortex distribution with strength γ(s) is given by formula:
( ) .2V
C
s dsγ θπ
Φ = −∫ (8)
In relations (7,8) variable s represents the arc length along profile C, and (r,θ) are the polar coordinates of point P'(x,y) relative to the point on the contour corresponding to arc length s (see fig.2).
Figure 2. Potential two-dimensional flow around profile .C
Therefore the potential in point P'(x,y) is
computed as follows
( ') cos sin
( ) ( ) ln( ) .2 2C C
P V x V yq s sr ds ds
α αγ θ
π π
∞ ∞Φ = +
+ −∫ ∫ (9)
In order to compute the plane flow potential Ф the collocation method is used, that is: profile C is approximated by a closed polygonal line
1
,N
jj
C E=
≈∪
with sides Ej having their vertices Pj and Pj+1 on C. The vertices Pj are having a higher density near the leading and trailing edges. This is achieved by choosing Chebyshev points as their x-coordinates. Numbering of the vertices starts from the trailing

18 Numerical and computational analysis of hydrodynamic effects in the micro-hydro power station
edge on the lower side in the direction of leading edge, passing further to the upper side (fig. 3).
Figure 3. Discretization of profile .C
It is further assumed that the strength of vortexes γ(s) distributed on profile C is constant on the boundary having value γ, and the strength of sources q(s) distributed on the profile is piecewise constant on each boundary element Ej with value qj, j=1,…,N. Breaking the integrals in equation (9) along each panel gives:
1
cos sin
ln( )2 2
j
Nj
j E
V x V yq
r ds
α α
γ θπ π
∞ ∞
=
Φ = +
⎛ ⎞+ −⎜ ⎟
⎝ ⎠∑ ∫
(10)
with unknowns γ and , 1, , .jq j N= … Consider now the boundary element Ej with
vertices Pj and Pj+1. The unit normal and tangent vectors of the element Ej are given by:
( sin ,cos ),
(cos ,sin ),j j j
j j j
n θ θ
τ θ θ
= −
= (11)
where 1 1sin and cos .j j j jj j
j j
y y x xL L
θ θ+ +− −= =
The unknowns γ and qj from relation (10) are determined from the boundary and Kutta conditions. The boundary condition is the flow tangency condition along the profile:
0V n⋅ = (12)
Imposing condition (12) on collocation points ( ),jj jM x y chosen to be the midpoints of Ej and
denoting the velocity components in Mj by uj and vj, respectively, provides N algebraic relations:
sin cos 0, j 1, ,j j j ju v Nθ θ− + = = … (13)
The last relation is provided by Kutta condition:
1
,NE E
V Vτ τ⋅ = ⋅ (14)
where τ denotes the unit tangent vector of the boundary element. Kutta condition (14) becomes:
1 1 1 1cos sin cos sin .N N N Nu v u vθ θ θ θ+ = − + (15)
The velocity components in point iM are determined by the contributions of velocities induced by sources and vortexes on each boundary element Ej:
1 1
1 1
cos ,
sin ,
N Ns v
i ij j ijj j
N Ns v
i ij j ijj j
u V u q u
v V v q v
α γ
α γ
∞= =
∞= =
= + +
= + +
∑ ∑
∑ ∑ (16)
where , , ,s s v vij ij ij iju v u v are the influence coefficients.
Let βij, i≠j, be the angle between j iP M and 1,i jM P +
and set βii=π. Let ( , )ij i jr dist M P= and define
, 1 , , 1, , .i jij
ij
rD i j N
r+= = … It can be shown that the
influence coefficients can be computed by the following formulas:
( )
( )
( )
( )
1 ln cos sin ,21 ln sin cos ,
21 ln sin cos ,
21 ln cos sin ,
2
sij ij j ij j
sij ij j ij j
vij ij j ij j
vij ij j ij j
u D
v D
u D
v D
θ β θπ
θ β θπ
θ β θπ
θ β θπ
= − −
= − +
= − +
= +
(17)
Substitute equations (16) and (17) in (13) and (15) to obtain a linear system with N+1 equations and N+1 unknowns γ and qj, j=1,…,N is obtained:
11
221
, 1
1
.N
ij i j
NN
N
bqbq
Abq
bγ
+
=
+
⎡ ⎤⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎡ ⎤ =⎣ ⎦ ⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦ ⎣ ⎦
(18)
Coefficients Aij and bi are given by formulas:
( )1 sin ln cos , , 1, , ,2ij ij ij ij ijA D i j Nβπ
= Δ + Δ = …
( ), 11
1 cos ln sin , 1, , ,2
N
i N ij ij ij ijj
A D i Nβπ+
=
= Δ − Δ =∑ …
(
)1, 1, 1 ,
1 1 ,
1 sin sin2
cos ln cos ln ,
N j j j N j Nj
j j Nj N j
A
D D
β βπ+ = Δ + Δ
− Δ − Δ
(
)1, 1 1 1 ,
1
1 1
1 sin ln sin ln2
cos cos ,
N
N N j j Nj N jj
j j Nj Nj
A D Dπ
β β
+ +=
= Δ + Δ
+ Δ + Δ
∑
( )1 1
sin , 1, , ,cos( ) sin( )
i i
N N
b V i Nb V V
θ αθ α θ α
∞
+ ∞ ∞
= − =
= − − − −
…

Numerical and computational analysis of hydrodynamic effects in the micro-hydro power station 19
with .ij i jθ θΔ = − The solution of linear system (18) provides
the values of γ and qj, using which the tangential components of velocity are computed:
cos sin .i i i i iu u vτ θ θ= +
Substitute (16) in the above relation to obtain:
1 1
1 1
cos cos
sin sin .
N Ns v
i ij j ij ij j
N Ns vij j ij i
j i
u V u q u
V v q v
τ α γ θ
α γ θ
∞= =
∞= =
⎛ ⎞= + +⎜ ⎟⎝ ⎠⎛ ⎞
+ + +⎜ ⎟⎝ ⎠
∑ ∑
∑ ∑
Using (17) and algebraic manipulations obtain:
( )
( )(( ))
1
cos
1 sin cos ln2
sin ln cos .
i i
N
i ij ij ij ijj
ij ij ij ij
u V
q D
D
τ θ α
βπ
γ β
∞
=
= −
+ Δ − Δ
+ Δ − Δ
∑ (19)
The local pressure coefficient on the discretized profile can be computed from relation
2
, 1 ,ip i
uC
Vτ
∞
⎛ ⎞= − ⎜ ⎟
⎝ ⎠ (20)
where iuτ are given by (19). The hydrodynamic forces acting on the boundary element Ej and pitching moment coefficient are given by:
( )( )
, 1
, 1
,
,
xj p j j j
yj p j j j
f C y y
f C x x
+
+
= −
= − (21)
1 1, .
2 2 4j j j j
m j xj yj
y y x x cc f f+ +− −⎛ ⎞ ⎛ ⎞= − + −⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠ (22)
The total force is the sum of contributions of each boundary element:
1 1
, ,N N
x xj y yjj j
F f F f= =
= =∑ ∑ (23)
Lift and moment coefficients are given by:
sin cos ,L x yC F Fα α= − + (24)
,1
.N
M m jj
C c=
=∑ (25)
3. DETERMINATION OF HYDRODYNAMIC DRAG
COEFFICIENT CD
After the computation of the velocity distribution in the potential flow around the profile, next phase consists in the computation of
boundary layer parameters divided into two sub-steps: laminar boundary layer and turbulent boundary layer [5-7]. The boundary layer starts at the stagnation point and follows the profile along the upper or lower surface in the direction of trailing edge, (fig.4).
Figure 4. Profile discretization for boundary layer analysis.
The computation of laminar boundary layer
parameters is based on the integral momentum and kinetic energy equations. The boundary layer thickness is defined as the distance from the profile at which the flow velocity differs by 1% from the velocity corresponding to the potential flow. Prandtl laminar boundary layer equations are derived from the steady incompressible Navier-Stokes equations:
2
2
0,
,
0.
u vx y
u v p uu vx y x y
py
ρ μ
∂ ∂+ =
∂ ∂
⎛ ⎞∂ ∂ ∂ ∂+ = − +⎜ ⎟∂ ∂ ∂ ∂⎝ ⎠
∂=
∂
(26)
Here, x represents the measured distance along the contour from the stagnation point, and y is the measured distance in the normal to surface direction (fig. 5).
Figure 5. Transition from laminar to turbulent boundary layer.
Introduce the displacement thickness δ*:
*
0
1 ,u dyV
δ∞ ⎛ ⎞= −⎜ ⎟⎝ ⎠∫ (27)
where V represents the velocity of the boundary layer exterior part in the considered point, and u is the tangential velocity in this point. Similarly, the momentum thickness θ is defined by
0
1 ,u u dyV V
θ∞ ⎛ ⎞= −⎜ ⎟⎝ ⎠∫ (28)

20 Numerical and computational analysis of hydrodynamic effects in the micro-hydro power station
and the kinetic energy thickness *θ is given by
2
*2
0
1 .u u dyVV
θ∞ ⎛ ⎞
= −⎜ ⎟⎝ ⎠∫ (29)
By integrating equations (26) and using relations (27−29), the Von Karman integral-differential momentum equation is obtained
* 12 ,
2 fd dV Cdx V dxθ θ δ
θ⎛ ⎞
+ + =⎜ ⎟⎝ ⎠
(30)
where Cf denotes the local friction coefficient on the profile surface. Introduce the shape parameter
*
.H δθ
= (31)
Then, equation (30) can be rewritten as follows:
( ) 12 .2 f
d dVH Cdx V dxθ θ+ + = (32)
Multiply equation (30) by u and integrate it:
* *
3 2 ,dd dV Cdx V dxθ θ
+ = (33)
where Cd is the dissipation coefficient. Introduce the second shape parameter:
*
* .H θθ
= (34)
Subtract equation (32) from equation (34) to get:
( )*
* *11 2 .2d f
dH dVH H C H Cdx V dx
θθ + − = − (35)
The system of equations (32) and (35) is not sufficient to determine all unknowns. The additional relations are based on Falkner-Skan semi-empirical relations [6]. Assume the following correlation between H* and H:
2
*2
( 4)0.076 1.515, if 4,
( 4)0.04 1.515, otherwise.
H HHH
HH
⎧ −+ <⎪⎪= ⎨
−⎪ +⎪⎩
(36)
Also let Re Re Vθ θ= ⋅ ⋅ and assume that
1 2*
1 Re ( ), 2Re ( ),2
df
CC F H F H
Hθ θ= =
where ( )
( )( )
2
21
2
7.40.01977 0.067, if 7.4,
1( )
7.40.022 0.067, otherwise,
6
HH
HF H
H
H
⎧ −− <⎪
−⎪= ⎨−⎪ −⎪ −⎩
(37)
( )( )( )
11/2
22
2
0.00205 4 0.207, if 4,( ) 0.003 4
0.207, otherwise.1 0.02 4
H HF H H
H
⎧ − + <⎪⎪= − −⎨
+⎪+ −⎪⎩
(38)
Multiply equation (32) by Reθ and let ( )2Reθω =
( ) 11 2 ( ).2
d dVV H F Hdx dxω ω+ + = (39)
Multiply (35) by *Re Hθ and rearrange terms:
( )*
2 1(ln ) 1 ( ) ( ).d H dH dVV H F H F HdH dx dx
ω ω+ − = − (40)
Introduce the following notations:
( )*
3
4 2 1
(ln ), ( ) ,
( ) ( ) ( ).
dV d HA x F Hdx dH
F H F H F H
= =
= −
Then equations (39) and (40) are rewritten as follows
( )
( )
1
3 4
1 ( ) 2 ( ) ( ),2
( ) ( ) 1 ( ) ( ).
dV x H A x F Hdx
dHV x F H H A x F Hdx
ω ω
ω ω
+ + =
+ − = (41)
The initial values are chosen to ensure that
( ) ( )0 0 and 0 0.dw dHdx dx
= =
Therefore, H(0) is the solution of the following equation:
4
1
( )1 .2 ( )
F HHH F H
−=
+
Solving the above equation provides us the root(0) 2.24.H ≈ Consequently,
( ) 1( (0))0 .(0)(2 (0))
F HA H
ω =+
The initial conditions become
( )
( )
1(2.24)0 ,
4.24 (0)0 2.24.
Fw
AH
=
= (42)
The system of nonlinear ODE (41) with initial conditions (42) is solved by the Backward Euler method, but in order to avoid the implicit iterations at the transition from step j to step j+1 the functions F1 and F4 are linearized in the neighborhood of Hj, while F3 takes the value F3(Hj). Thus, there is obtained a system of two bilinear equations with the unknowns Hj+1 and 1jω +
:

Numerical and computational analysis of hydrodynamic effects in the micro-hydro power station 21
1 1 1 1
1 1 1 1
2 2 2 21 1 1 1
,
,j j j j j j j j
j j j j j j j j
A B H C H D
A B H C H D
ω ω
ω ω+ + + +
+ + + +
+ + =
+ + = (43)
where
( ) ( )( )( )
( ) ( ) ( )
( ) ( )
( ) ( )
( )
111
11
11
111 1
3 121
3 121
24
2 , 2
,
,
0,2
( ),
( ),
,
jj j
j j
j j
jj j j j j
j j jj j
j jj j
j j
V xA A x
xB A x
C F x
V xD F x F x H
xF x H V x
A A xx
F x V xB A x
xC F x
ω
++
+
+
++
++
= +Δ
=
′= −
′= + − =Δ
= −Δ
= −Δ
′= −
( ) ( )14 4 .j j j jD F x F x H′= −
This method is iterated till either the transition from the laminar layer to the turbulent layer is predicted or trailing edge TE is reached.
The transition from laminar to turbulent boundary layer is located by Michel criterion, [7]. Let Re Rex Vx= and
0.46max
22.4Re 1.174 1 Re .Re x
xθ
⎛ ⎞= +⎜ ⎟
⎝ ⎠ (44)
Then, transition takes place if maxRe Re .θ θ> Transition point is the root of the linear interpolation of maxRe ( ) Re ( ).x xθ θ−
To analyze the turbulent boundary layer introduce the mean values and fluctuations:
0
0
1( , ) lim ( , , ) ,t T
Tt
q x y q x y t dtT
+
→∞= ∫ (45)
( , , ) ( , , ) ( , ).q x y t q x y t q x y′ = − (46)
The equations of the turbulent boundary layer are obtained from the Navier-Stokes equations:
2
0,
,
.
u vx y
u v p uu v u vx y x y y
p v vy y y
ρ μ ρ
μ ρ
∂ ∂+ =
∂ ∂
⎛ ⎞ ⎛ ⎞∂ ∂ ∂ ∂ ∂ ′ ′+ = − + −⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟∂ ∂ ∂ ∂ ∂⎝ ⎠ ⎝ ⎠⎛ ⎞∂ ∂ ∂ ′= −⎜ ⎟⎜ ⎟∂ ∂ ∂⎝ ⎠
(47)
Similarly to the case of laminar boundary layer, the Von Karman integral equations are obtained. The computations of the turbulent boundary layer parameters are done by applying the Head’s model
[6]. Consider the flow volume in the boundary layer at an arbitrary point x:
( )
0
( ) .x
Q x udyδ
= ∫
Then the displacement thickness is given by:
* .QV
δ δ= −
Introduce the entrainment velocity:
( )1 .dE V Hdx
θ=
According to the Head’s model the dimensionless velocity E/V depends only on H1, and H1, in its turn, depends only on H. Cebeci and Bradshow [6] have considered the empirical relations
0.616910.0306( 3)E H
V−= − (48)
and consequently
1.287
1 3.064
0.8234( 1.1) 3.3, 1.6,1.5501( 0.6778) 3.3, otherwise.
H HH
H
−
−
⎧ − + ≤= ⎨
− +⎩(49)
Finally, the last equation to determine the unknowns 1, ,H Hθ and fC is the Ludwieg-Tillman wall friction law:
0.678 0.268
0.246 .10 Ref HC
θ
= (50)
Combine the Von Karman integral equation and the relations (48)−(50) to obtain the following ODE system:
( , ),dY g Y xdx
= (51)
where [ ]1 ,TY Hθ= and
( )
( )
1
1 10.6169
1
2 12
( , ) .0.03063
f
H dV CV dx
g Y x H HdV dV dx dx H
θ
θθ θ
+⎡ ⎤− +⎢ ⎥
⎢ ⎥=⎢ ⎥− − +⎢ ⎥−⎣ ⎦
The initial values are the final values supplied by the laminar boundary layer step. The numerical integration of system (51) is done by Runge-Kutta method of order 2, namely:
*
*1
( , ),
1 1( , ) ( , ) .2 2
j j j j
j j j j j j
Y Y h g Y x
Y Y h g Y x g Y x+
= +
⎛ ⎞= + +⎜ ⎟⎝ ⎠
The calculation is done either till the trailing edge is reached or till the separation of the turbulent layer occurs.

22 Num
Squirecompute the
DC
where (λ =
4. THE TACTIN
H
The nuare used to
,L refC and selected froprofiles wit6 shows thecoefficients6, the NACselected as t
The nuare used to correspondichord lengtformulas (correspondi1.3 m are ca
Figure 6coefficien
0012
The workinDuring a fu
15 30
0.5
1
1.5
2Prof
Ang
CL, C
D
0 15 30
0.5
1
1.5
2Pro
Angl
CL, C
D
erical and co
e-Young foe drag coeffi
( ,2 |TEx CV λθ=
( )| 5 2.TExH +
TORQUENG ON THHYDRAU
umerical mecompute the
,D refC for om the NACth a reference hydrodynams. Taking intoCA 0016 hydthe referenceumerical mecompute the
ing to NACth 1 refc m=
24), (25) aing to the pralculated from
1.3
(1
1.3
L
M
D
C
C
C
=
=
=
6. Hydrodynnts versus the2, 0016, 6301
ng angle of atull revolution
0 45 60 75 90
file: NACA 63018
gle of attack, (Deg
0 45 60 75 90
ofile: NACA 0012
le of attack, (Deg)
C
C
omputationa
ormula [8] ficient CD:
,|upper TEC xV λθ+
E AND THHE MULT
ULIC ROT
ethods, descre hydrodyna
the symmCA library
ce chord lengmic lift ,L refCo account thdrodynamic e profile. ethods, descre hydrodynaCA 0016 p: , ,,L ref M rC C
and (52). Trofile with tm the relatio
,
2,
,
3 ,
.3) ,
3 .
L ref
M ref
D ref
C
C
C
amic lift LC e angle of att18 and 67015
ttack is selecn around the
150
0.5
1
1.5
2P
A
CL, C
D
150
0.5
1
1.5
2
A
CL, C
D
CL
CD
al analysis of
is applied
), ,lowerC (52
HE FORCETI-BLADETOR
ribed previouamic coefficimetrical pro
of aerodynagth cref=1m. f and drag C
he data from profile is b
ribed previouamic coefficiprofile with ref and ,D refCThe coefficithe chord lenons:
(5
and drag DCtack for NAC5 profiles.
cted to beα =e rotor’s axis
30 45 60 75
Profile: NACA 67015
Angle of attack, (Deg
30 45 60 75
Profile: NACA 0016
Angle of attack, (Deg
f hydrodynam
d to
2)
ES E
usly, ients files amic Fig.
,D refC Fig. eing
usly, ients
the by
ients ngth
3)
D CA
18o= . s the
bladpos(angdireshifconsha60˚its r18˚ 18˚ effeposuse propsectangretu
acticomare
Fno
90
90
mic effects in
de changes ition (fig. 7)gle formed bection) is 18fts from 18˚ntribute to thft. In this se, the blade isre-positioninat the end oin sector III
ect is minimitioned fromthe kinetic
posed to re-ptor IV; in se
gle of 90˚, aurns to 18˚.
The magning on the bmponents xF
presented in
Figure 7. B
Figure 8. Maormal compon
rotor blad
0 30 6-4000
-3500
-3000
-2500
-2000
-1500
-1000
-500
0
500
1000
1500
2000
2500
3000
3500
4000
Forc
es, (
N)
Profile:
Flow vel
Angle of
n the micro-hy
its attack a. Thus, in seby the blade8˚; in sector up to -18˚,
he total torquector, extends carried freeng ends withof sector III. I. In sectors Imal and the
m angle -18˚ c energy in position the bector V the
and in sector
nitude of the blade, and itand yF vers
n fig. 8.
Blade position
agnitude, tangnent of the h
de versus the
0 90 120 150 18
Forces acting on the bla
Positioning a
NACA 0016
ocity = 1 m/s
f attack = 18 Deg
hydro power s
angle depenector I the an’s chord andr II the ang, but the blaue developedded up to apely by the wah an angle o The angle oIV-VI the hye blade hasto angle 18the sectors
blade from -blade remai
r VI the ang
hydrodynamts tangential sus the posit
n and workin
gential comphydrodynami
positioning
80 210 240 270 30
ade, Profile: NACA 0016
angle, (Deg)
Rotor radius = 2 m
Number of blades = 5
Blade height = 1.4 m
Blade length = 1.3 m
Magnitude of tTangential comNormal compo
station
nding on itsngle of attackd water flowgle of attackade does notd at the rotorpproximatelyater flow andf attack of -of attack is -ydrodynamics to be re-. In order toIV-VI it is
18˚ to 90˚ inins under angle of attack
mic force Fand normal
ioning angle
ng areas.
ponent and ic force of a angle.
00 330 360
the forcemponentonent
s k w k t r y d --c -o s n n k
l e

Numerical and computational analysis of hydrodynamic effects in the micro-hydro power station 23
Fig. 9 shows the torque ,r iT developed by a single blade versus the positioning angle. Fig. 10 shows the total torque at the rotor shaft rT Σ developed by all blades versus the positioning angle. Fig. 11 shows the total torque rT Σ for three water flow velocities V∞ .
Figure 9. Torque ,r iT developed by the rotor blade
versus the positioning angle.
Figure 10. Total torque rT Σ developed by 5 blades
at rotor shaft versus the positioning angle.
Figure 11. Total torque rT Σ at rotor shaft versus the positioning angle for various water flow velocities.
To determine the optimal working angle of attack it is necessary to compute the value of the torque developed by one blade and the total torque for several values of the angle of attack, namely:
15 , 17 , 18 , 20 ,o o o oα = (fig. 12−13). Also, the performance of 3-, 4- and 5-blades
rotor was analyzed. The total moment developed by the rotor shaft was computed and the results are presented in fig. 14.
Figure 12. Torque ,r iT developed by one blade
versus the positioning angle.
Figure 13. Total torque rT Σ developed by 5 blades
versus the positioning angle.
Figure 14. Total torque rT Σ developed at the 3-, 4- and 5-blade rotor shaft versus the positioning angle.
0 30 60 90 120 150 180 210 240 270 300 330 360-5000
-4000
-3000
-2000
-1000
0
1000
2000
3000
4000
5000
6000
7000Torque developed by one blade vs the positioning angle
Positioning angle, (Deg)
Torq
ue, (
N ⋅
m)
Profile: NACA 0016
Flow velocity = 1 m/s
Angle of attack = 18 Deg
Rotor radius = 2 m
Number of blades= 5
Blade height = 1.4 m
Blade length = 1.3 m
0 30 60 90 120 150 180 210 240 270 300 330 3600
2000
4000
6000
8000
10000
12000
14000
Total torque vs positioning angle
Positioning angle, (Deg)
Tota
l tor
que,
(N⋅ m
)
Profile: NACA 0016
Flow velocity = 1 m/s
Attack angle = 18 Deg
Rotor radius = 2 m
Number of blades = 5
Blade height = 1.4 m
Blade length = 1.3 m
0 30 60 90 120 150 180 210 240 270 300 330 3600
5000
10000
15000
20000
25000
30000
35000
40000
45000
Positioning angle, (Deg)
Torq
ue, (
N ⋅ m
)
Total torque at different flow velocities
1 m/s1.3 m/s1.6 m/s
0 30 60 90 120 150 180 210 240 270 300 330
0
1000
2000
3000
4000
5000Torque developed by one blade at different angle of attack
Positioning angle, (Deg)
Torq
ue, (
N ⋅
m)
15 Deg17 Deg18 Deg20 Deg
0 30 60 90 120 150 180 210 240 270 300 330 3600.5
0.6
0.7
0.8
0.9
1
1.1
1.2
1.3
1.4
1.5
1.6
1.7x 104 Total torque at different angles
Positioning angle, (Deg)
Torq
ue, (
N ⋅
m)
15 Deg17 Deg18 Deg20 Deg
0 30 60 90 120 150 180 210 240 270 300 330 360
0.5
0.6
0.7
0.8
0.9
1
1.1
1.2
1.3
1.4
1.5
1.6
1.7x 104 Total torque at different configurations
Positioning angle, (Deg)
Torq
ue, (
N ⋅
m)
3 blades4 blades5 blades

24 Numerical and computational analysis of hydrodynamic effects in the micro-hydro power station
5. OPTIMIZATION OF NACA 0016 PROFILE
In order to maximize the torque produced by
the micro hydro power plant rotor, the optimization of the hydrodynamic profile will be considered. The torque depends on the lift and drag hydrodynamic forces. The hydrodynamic forces through the hydrodynamic coefficients depend on the angle of attack α, Reynolds number Re and the shape of the hydrodynamic profile. The hydrodynamic shape of the profile was selected from the NACA library of profiles having as parameter only the maximal thickness. The angle of attack constitutes the second parameter. The optimization aims at maximizing the lift force and, at the same time, does not allow the pitching moment and the drag force to take very large values. The following optimization problem is considered:
Maximize ( , )L LC C θ α= subject to constraints on DC and MC ,
where θ is the maximum thickness and α is the angle of attack. The negative maximum value for
the moment coefficient will correspond to the solution for the angle of attack 0o. The maximum
value for the drag coefficient will correspond to the solution for the angle of attack α = 18˚. Also,
restrictions have been added to the optimization
Figure 15. Standard and optimised NACA 0016
hydrodynamic profile.
parameters 10% 20%θ≤ ≤ and 0 20o oα≤ ≤ . The following method is used: While given accuracy is not attained do, Solve ( )i i iB s f x= −∇ , 1i i i ix x sα+ = + , End do where iα are the multipliers and iB are the positive definite approximations of the Hessian. The
optimization is implemented in MATLAB with a sequential quadratic programming algorithm with a line search and a BFGS Hessian update. The quadratic sub-tasks are solved by modified projection method. The gradient of function
( , )L LC C θ α= is approximated with finite differences with uniform step 410h −= . NACA 0016 profile was considered as initial profile. The result of the shape optimization procedure is presented in fig. 15.
6. SIMULATION OF FLOW INTERACTION WITH
HYDRODYNAMIC BLADES
In order to perform the deformation and stress analysis of a submersed blade with NACA 0016 hydrodynamic profile, the finite element ANSYS software is being used [13,14]. Consider a submersed blade in the water flow subjected to hydrodynamic forces corresponding to the flow velocity of 2 m/s and hydrostatic pressure. The maximum value of the forces acting on the blade is 11 KN.
The considered hydrodynamic blade has 5 transversal stiffening ribs made of aluminium alloy H37 with Young modulus 11 21.97 10E N m= ⋅ and Poisson coefficient 0.27ν = ,[12]. Due to the fact that the blades will be acting in aggressive conditions (water and possible debris), an important issue consists in the assurance of the blades impermeability. Thus, the hydrofoil is injected with polyurethane foam with density 0.6 kg/cm3,
0.95 ,E GPa= 0.24ν = . Blade’s cover is made from multilayer composite material, fig. 16.
Figure 16. The structure of the composite material
blade cover.
The Young modulus and Poisson coefficient are computed as [11], 13.2E GPa= and 12 0.3.ν =
Since the estimated deformations are small, the linear elasticity framework and Kirchhoff-Love
Nume
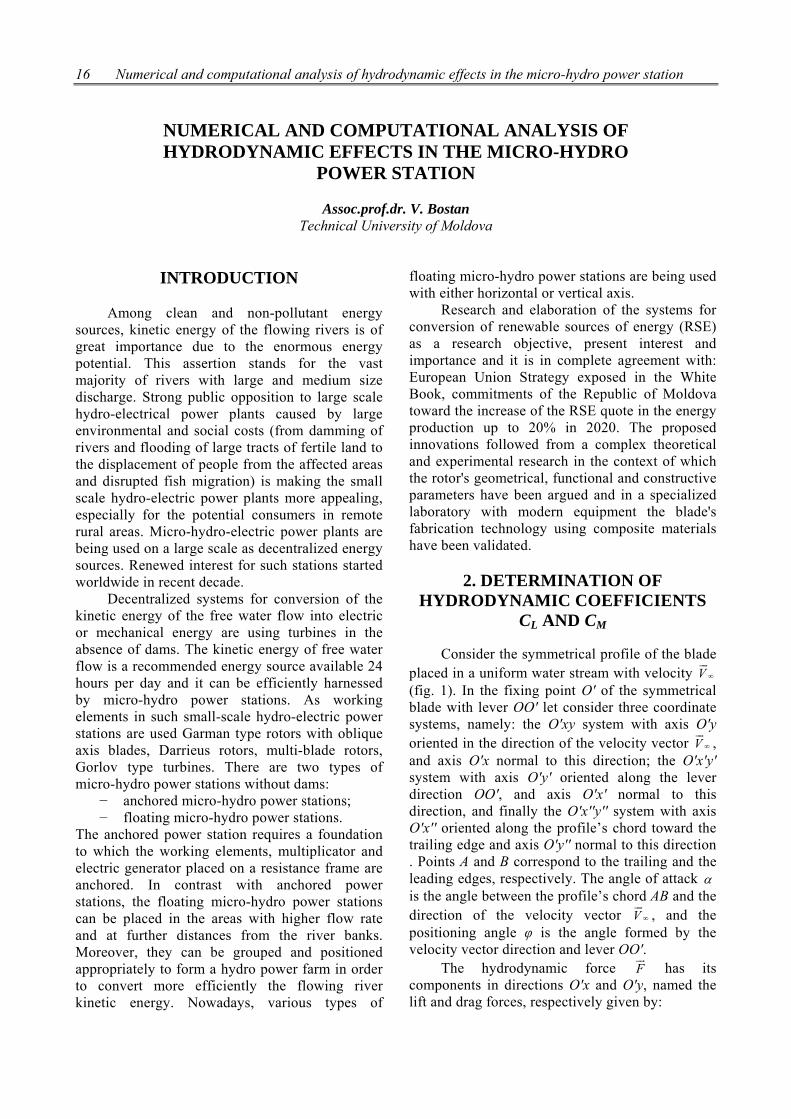
thin shell thbetween laDiscretizaticover and Sfig. 17. Thdeformationthe degrees 17) ux=0, uyon line C, u
Figure 17
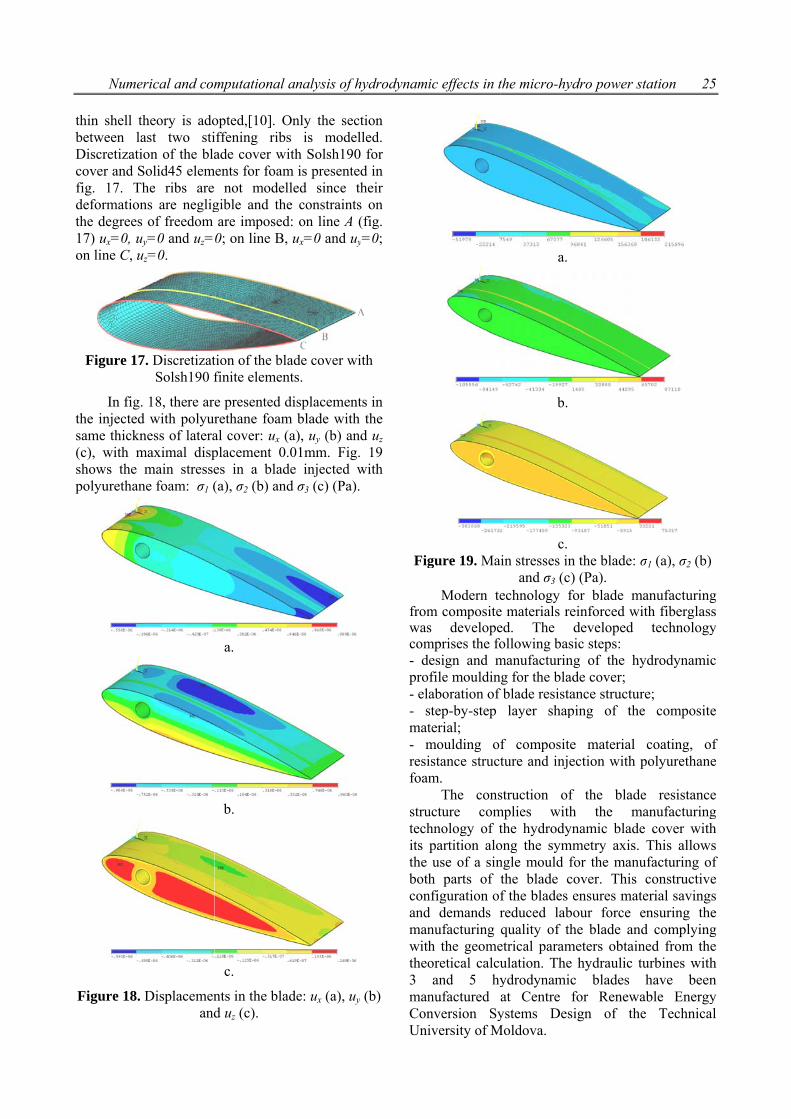
In fig.the injectedsame thickn(c), with mshows the polyurethan
Figure 18.
rical and com
heory is adoast two stion of the bla
Solid45 elemhe ribs are ns are neglig
of freedom y=0 and uz=
uz=0.
7. DiscretizatSolsh190 f
18, there ard with polyurness of lateramaximal disp
main stressene foam: σ1 (
Displacemenand
mputational
opted,[10]. Oiffening ribade cover w
ments for foamnot model
gible and thare imposed0; on line B,
tion of the blfinite elemen
e presented drethane foamal cover: ux (placement 0es in a blad(a), σ2 (b) an
a.
b.
c.
nts in the blad uz (c).
analysis of h
Only the secs is mode
with Solsh190m is presentelled since te constraints
d: on line A, ux=0 and uy
lade cover wnts.
displacemenm blade with(a), uy (b) an.01mm. Figde injected wnd σ3 (c) (Pa)
ade: ux (a), uy
hydrodynami
ction lled. 0 for ed in their s on (fig. y=0;
ith
nts in h the nd uz . 19 with .
y (b)
Fig
fromwascom- dpro- ela- smat- mresifoam
strutechits the bothconandmanwiththeo3 manConUni
ic effects in t
gure 19. Ma
Modern tem composites developemprises the foesign and mfile mouldinaboration of step-by-step terial; moulding ofistance structm.
The consucture comhnology of tpartition alouse of a sin
h parts of nfiguration ofd demands rnufacturing h the geomeoretical calcuand 5 hy
nufactured nversion Syiversity of M
the micro-hy
a.
b.
c. in stresses in
and σ3 (c)echnology fe materials reed. The ollowing basmanufacturing for the bla
f blade resistalayer shap
f compositeture and inje
struction ofmplies withthe hydrodynong the symngle mould fthe blade cf the blades reduced labquality of th
etrical paramulation. Theydrodynamicat Centre fystems Des
Moldova.
ydro power st
n the blade: σ) (Pa). for blade maeinforced wideveloped
sic steps: ng of the hyde cover; ance structurping of the
e material ection with p
f the bladeh the manamic blade
mmetry axis. for the manucover. This ensures mate
bour force ehe blade and
meters obtain hydraulic tuc blades for Renewa
sign of the
tation 25
σ1 (a), σ2 (b)
anufacturingth fiberglass
technology
ydrodynamic
re; e composite
coating, ofpolyurethane
e resistanceanufacturinge cover withThis allows
ufacturing ofconstructiveerial savingsensuring thed complyingned from theurbines withhave been
able Energye Technical
5
g s y
c
e
f e
e g h s f e s e g e h n y l

26 Num
7HY
Based
elaborated turbines witof the bladdirection. Tconfiguratiostations for electric or m
Fig. 2micro hydroblades usedpresented hydropowerMHCF D4with 5 blabearings in 3 with electit is placedblades guid
Figurhydr
3−mechan
Fig. 2station MHkinetic enerindustrial efig. 23 prinstalled on
erical and co
. FLOATAYDROPOW
d on carried otwo typo
th 3 and 5 bldes with reThere were pons of flo
conversion mechanic ene20 presents topower stati
d for water pthe constru
r station forx1,5E based
ades. The brotor 2 coup
tric generatod the spatiaing and orien
re 20. Kinemropower statinical gear, 4
21 and 22 shCF D4x1,5Ergy into elecnterprises fr
resents the n river Prut.
omputationa
ABLE MIWER STA
out research, -dimensions lades and optespect to thproposed [2
oatable micof river kin
ergy. he kinematicion MHCF Dpumping. In uctive concr electric end on the hy
blades 1 arepled through r 4. On the f
al truss 7 contation mech
matic scheme ion: 1−blade,5− bearings
how the mi
E for the conctric energy rom Republimicro hydr
al analysis of
CRO TIONS
there have bof hydra
timal orientahe water str], four differo hydropo
netic energy
c scheme ofD4x1,5M wi
fig. 21, thercept of m
nergy generaydraulic ture mounted wa planetary
floating bodioupled with hanism 6.
of a micro , 2−rotor,
s, 6−belt driv
icro hydroponversion of rmanufacture
ic Moldova, ropower sta
f hydrodynam
been aulic ation ream erent ower into
f the ith 5 re is
micro ation rbine with gear ies 5
the
ve.
ower river ed at
and ation
mic effects in
Figure 21. M
Figure 22. M
Figure 23. MD4x1
n the micro-hy
Micro hydropD4x1,5
Micro hydropD4x1,5
Micro hydrop,5E installed
hydro power s
power station5E.
power station5E.
power stationd on river Pru
station
n MHCF
n MHCF
n MHCF ut.

Numerical and computational analysis of hydrodynamic effects in the micro-hydro power station 27
8. CONCLUSIONS
The hydraulic turbine with 5 hydrodynamic profile blades assures conversion of 49.5% of the energetic potential of water stream with velocity 1.3 m/s. The optimal orientation of the blades with respect to water stream direction (enabled by a guidance mechanism) assures participation of all blades (even those moving upstream) in generating the torque at the rotor shaft. The blades with composite materials cover injected with polyurethane foam and resistance structure with 5 stiffening ribs assure minimal local deformations that will not influence significantly the water flow and efficiency of energy conversion. Experimental testing of the micro hydropower station MHCF D4x1,5E in real field conditions confirmed that the hydropower station with hydrodynamic 5−blade rotor assures the conversion of the energy at the rotor shaft to the generator clams with efficiency of 77.5%.
References:
1. I. Bostan, V. Dulgheru, V. Bostan, R. Ciuperca. Anthology of Inventions: Systems for Renewable Energy Conversion. Ch.: “BonsOffices”SRL, 2009. 458pp. ISBN: 978-9975-80-283-3. 2. I. Bostan, V. Bostan, V. Dulgheru. Numerical modelling and simulation of the fluid flow action on rotor blades of the micro-hydropower station, Ovidius University Annals of Mechanical Engineering, Vol. VIII, Tom I, 2006, p.70-78. 3. J. Moran. An Introduction to Theoretical and Computational Aerodynamics, John Wiley and sons, 1984. 4. J. Katz, A. Plotkin. Low Speed Aerodynamics, From Wing Theory to Panel Methods, Mac-Graw Hill, 1991. 5. G.K. Batcelor. An Introduction to Fluid Dynamics, Cambridge University Press, 1970. 6. T. Cebeci, P. Bradshaw. Momentum Transfer in Boundary layers, Hemisphere Publishing Corportation, 1977. 7. W.C. Reynolds, T. Cebeci. Calculation of Turbulent Flows, Springer-Verlag, Topics in Applied Physics Series, Vol.12, 1978. 8. R.Michel. Etude de la Transition sur les Profiles d’Ales, Onera Report, 1/1578A, 1951. 9. H.B. Squire, A.D. Young. The Calculation of the Profile Drag of Aerofoils, R.&M.1838, ARC Technical Report , London, 1938.
10. P. G. Ciarlet. Mathematical Elasticity, vol.II. Theory of Plates, Elsevier Science B.V., Amsterdam, 1997. 11. R. M. Jones. Mechanics of Composite Materials, 2nd Edition, Taylor & Francis, 1999. 12. MIL-HDBK-17 Composite Materials Handbook. 13. ANSYS 10.0, User’s Guide. 14. ANSYS 10.0, Advanced Analysis Techniques Guide
Recommended for publication 12.03.2012.