nhtsa strategy for vehicle safety - ::: japan international … · · 2013-03-25looking sensors...
TRANSCRIPT
NHTSA Strategy for Vehicle NHTSA Strategy for Vehicle SafetySafetySafety Safety March 20 2013March 20 2013March 20, 2013March 20, 2013Washington, DC
Joseph. S. Carra, DirectorStrategic Planning for Domestic and GlobalStrategic Planning for Domestic and GlobalIntegration of Vehicle safetyNational Highway Traffic Safety Administration

The Problem!!!The Problem!!!
SafetySa ety• 32,367 highway deaths in 2011• 5, 340,000 crashes/year • Leading cause of death for ages 4 to 34• Leading cause of death for ages 4 to 34
Mobility• 4 200 000 000 hours of4,200,000,000 hours of
travel delay• $80,000,000,000 cost of
urban congestiong
Environment• 2,900,000,000 gallons of
wasted fuel
2
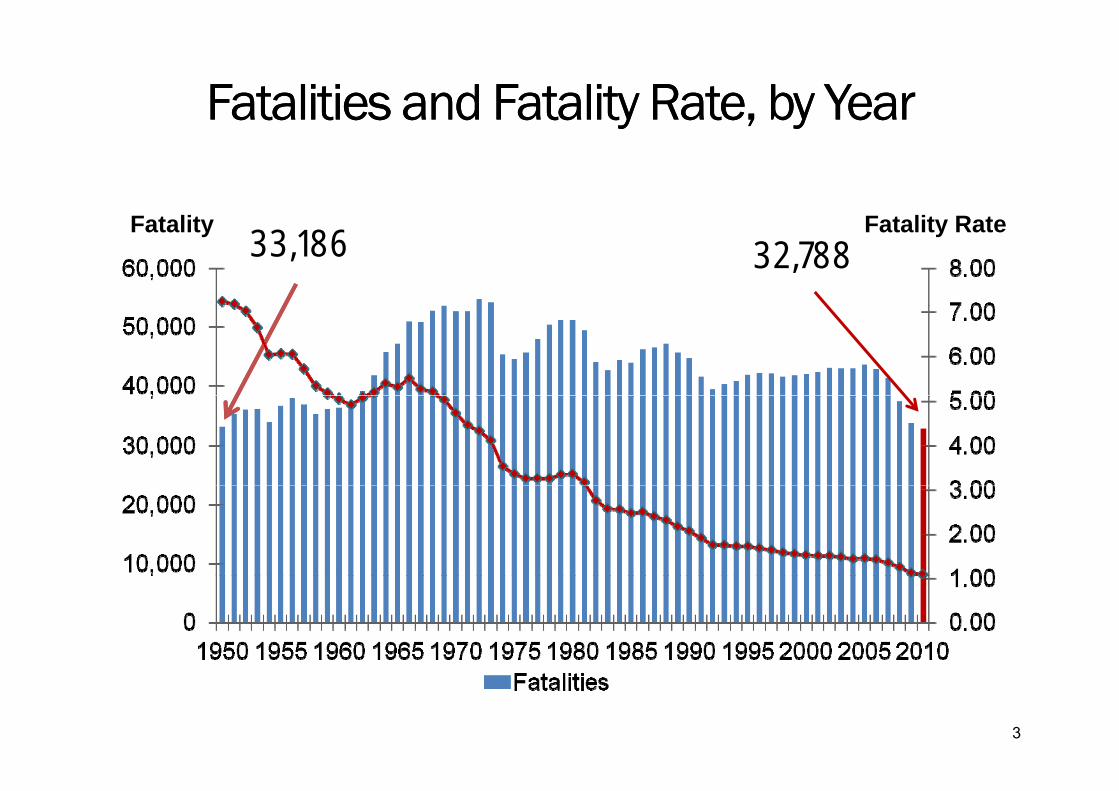
Fatalities and Fatality Rate, by YearFatalities and Fatality Rate, by Yeary yy y
F t lit F t lit R t33,186
Fatality Fatality Rate32,788
3

The Haddon MatrixThe Haddon Matrix
P E tHuman Vehicle Environment
Pre-Event
Event
Post-EventPost-Event
A Comprehensive Approach to Highway Safety
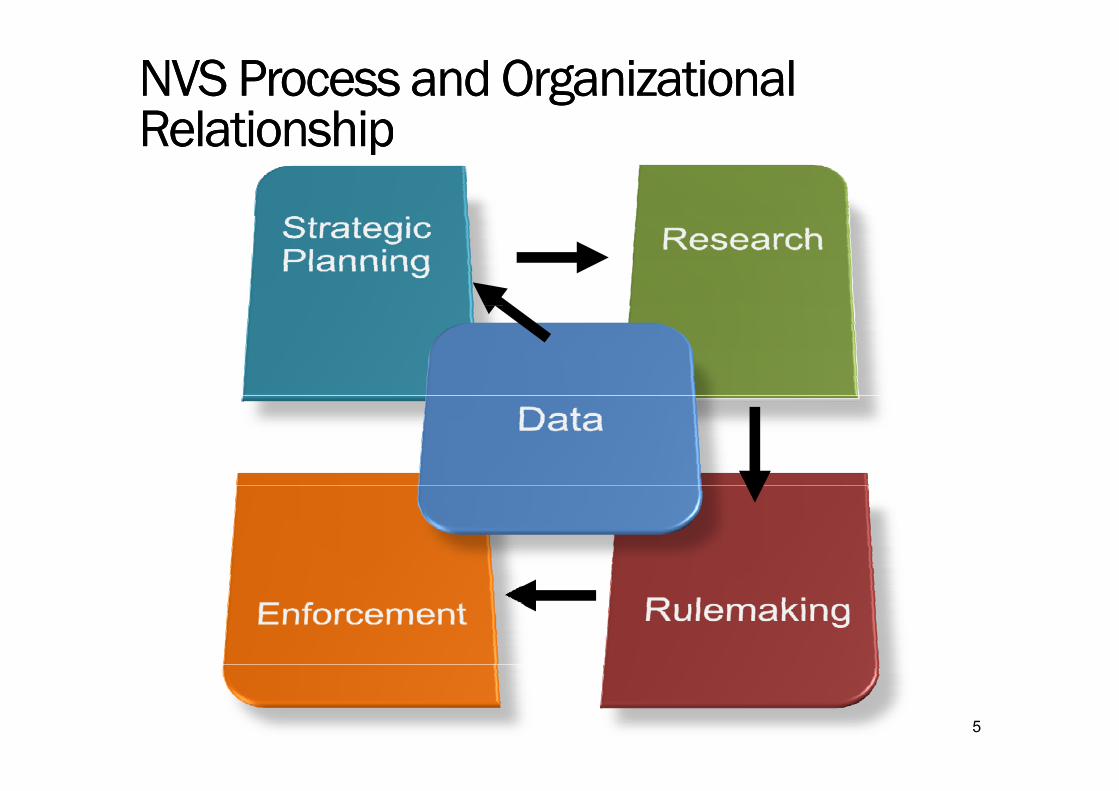
NVS Process and Organizational NVS Process and Organizational RelationshipRelationshipRelationshipRelationship
5
Research Program PhilosophyResearch Program Philosophyg p yg p y
– Aligned with DOT & NHTSA goals– Primarily focused on regulatory outcomes– Primarily focused on regulatory outcomes
• But with some continuing component of exploratory & innovative “basic” research
f f /– Prioritized based on potential for fatality/injury reductions• With consideration for special populations and riskWith consideration for special populations and risk
scenarios– Collaborative
6
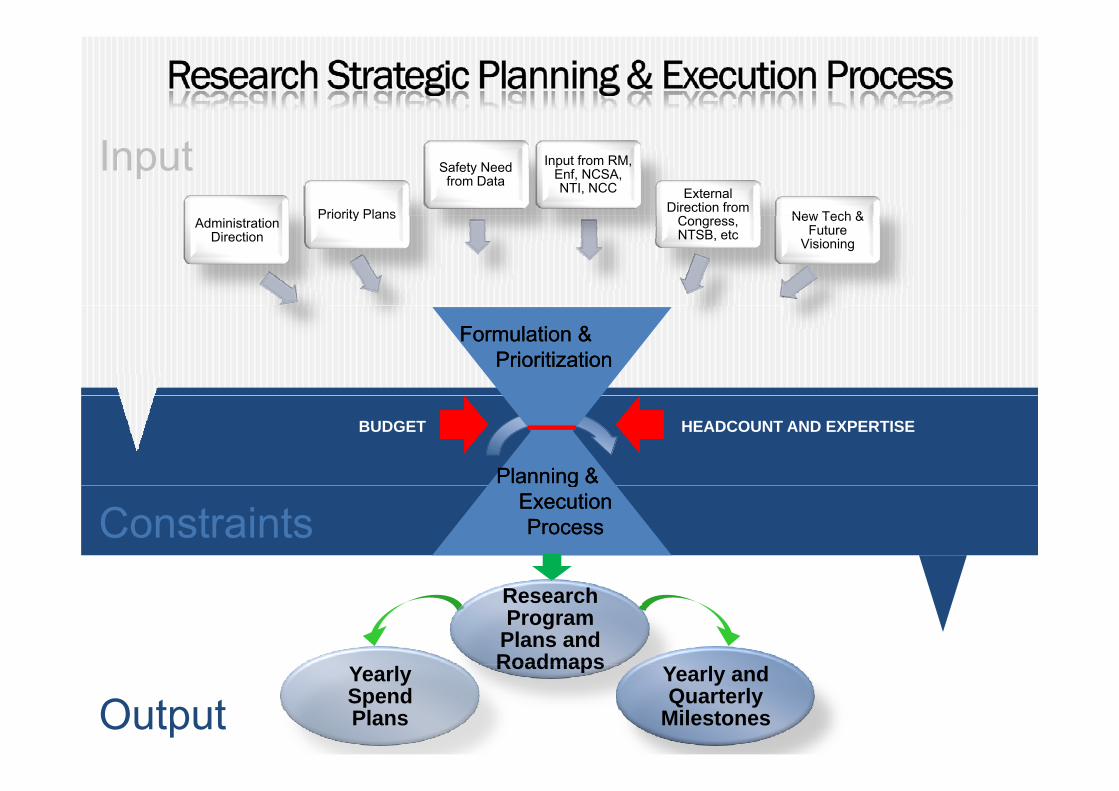
Priority Plans
Safety Need from Data
Input from RM, Enf, NCSA, NTI, NCC External
Direction from C New Tech &
InputAdministration
Direction
Priority Plans Congress, NTSB, etc
New Tech & Future
Visioning
Formulation & Formulation & PrioritizationPrioritization
HEADCOUNT AND EXPERTISEBUDGET
Planning & Planning &
Constraintsgg
Execution Execution ProcessProcess
Research Program
Plans and Roadmaps
OutputYearly Spend Plans
Roadmaps Yearly and Quarterly
Milestones

Program ApproachProgram Approachg ppg ppGuided by 10-Year Strategic Vision and 3-Year Priority Plan, and other inputs:
C t t t i 3 5 P Pl & R d Create strategic 3-5 year Program Plans & Roadmaps With outcomes focused on regulatory decisions & implementation, and execute them
Motorcoach Safety PlanMotorcoach Safety Plan V2V Roadmap Distraction Plan Biomechanics Plan
Alt ti E V hi l S f t P Alternative Energy Vehicle Safety Program Human Factors for V2V/V2I Roadmap Electronics Reliability Plan Cybersecurity Plany y Automated Vehicle Plan
…. Elderly Occupant Plan AACN Roadmap AACN Roadmap Advanced Crashworthiness Plan
…. Avoidance/Crashworthiness Integration Plan? Vehicle/Behavioral Integration Plan?
8
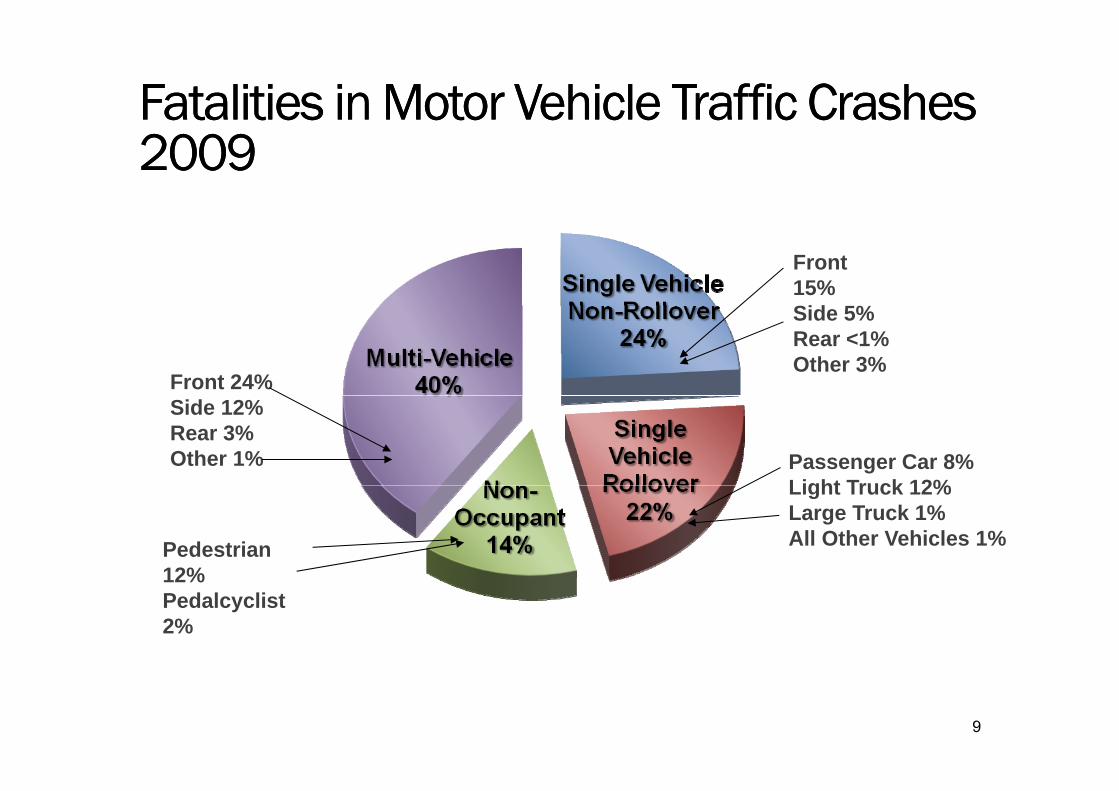
Fatalities in Motor Vehicle Traffic Crashes Fatalities in Motor Vehicle Traffic Crashes 20092009
Front 15%Sid 5%
Front 24%
Side 5%Rear <1%Other 3%
Side 12%Rear 3%Other 1% Passenger Car 8%
Light Truck 12%Light Truck 12%Large Truck 1%All Other Vehicles 1%Pedestrian
12%12%Pedalcyclist 2%
9
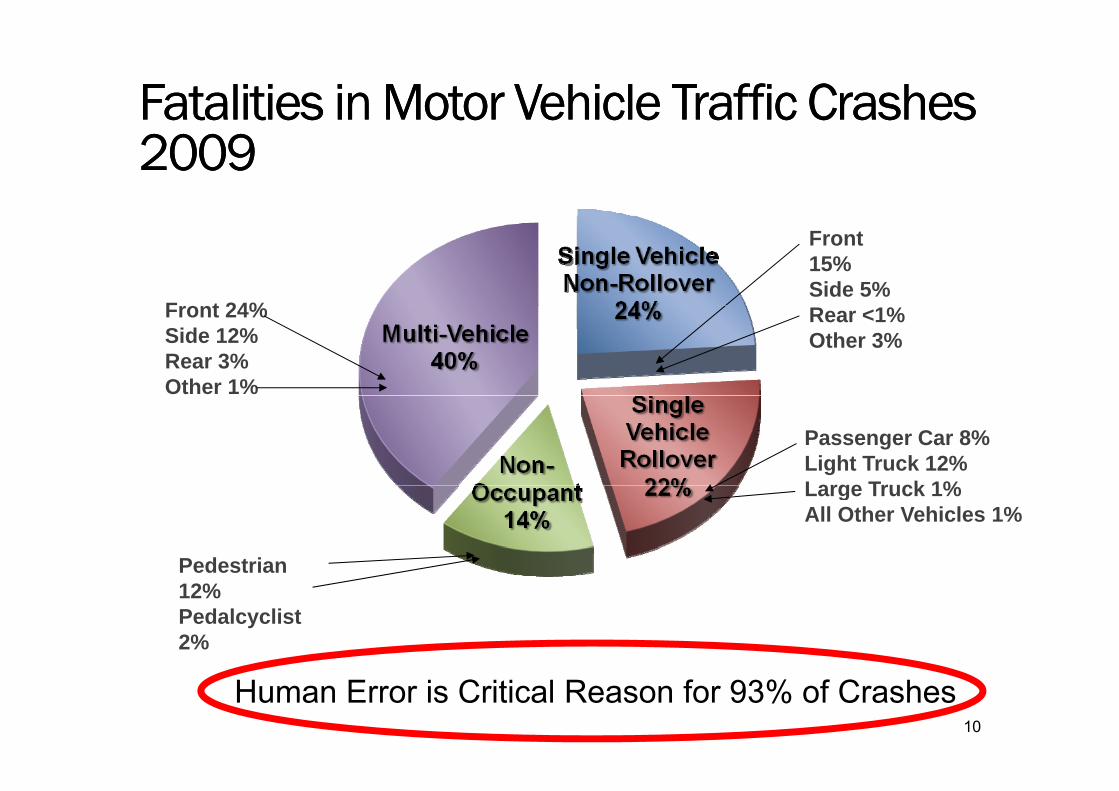
Fatalities in Motor Vehicle Traffic Crashes Fatalities in Motor Vehicle Traffic Crashes 20092009
F t 24%
Front 15%Side 5%
Front 24%Side 12%Rear 3%Other 1%
Rear <1%Other 3%
Passenger Car 8%Light Truck 12%Large Truck 1%Large Truck 1%All Other Vehicles 1%
Pedestrian 12%Pedalcyclist 2%
10
(0Human Error is Critical Reason for 93% of Crashes
Crash Avoidance
Crash WorthinessCrash Worthiness
Biomechanics
ESV ConferenceESV Conference
11

C AS A O A CCRASH AVOIDANCE RESEARCH
Areas Of Focus•Distraction•Distraction•Forward Collision Braking•Pedestrian Crash Avoidance•Driver Monitoring and Support Systems•Alcohol Detection•Connected Vehicles
•Electronic Control SafetyElectronic Control Safety •Cybersecurity•Automated Vehicles
12
•Modeling and Simulation for Effectiveness
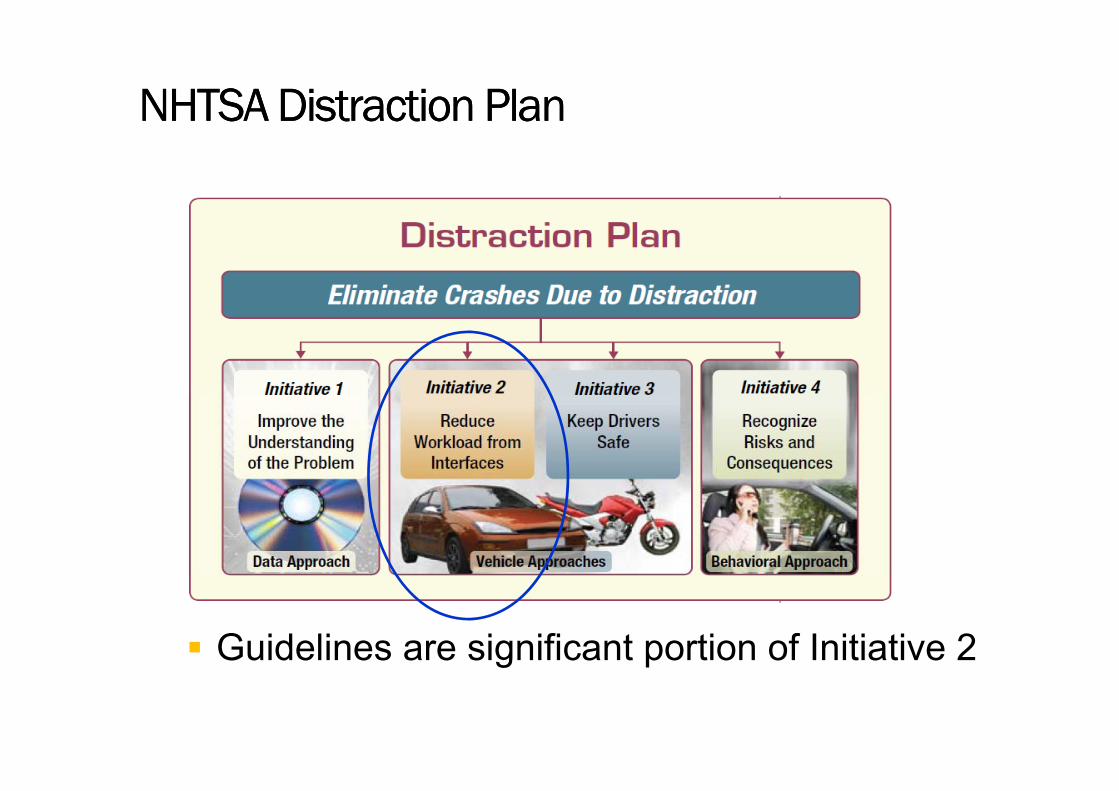
NHTSA Distraction Plan NHTSA Distraction Plan
Guidelines are significant portion of Initiative 2g p
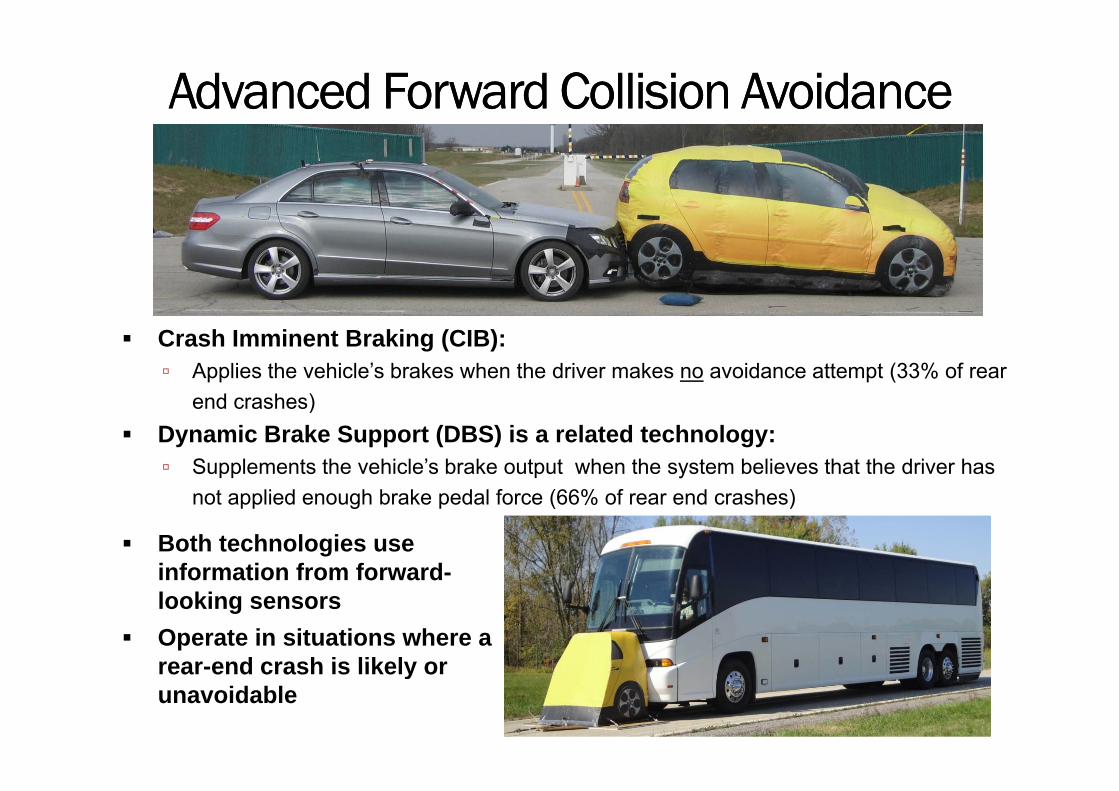
Advanced Forward Collision AvoidanceAdvanced Forward Collision Avoidance
Crash Imminent Braking (CIB): Applies the vehicle’s brakes when the driver makes no avoidance attempt (33% of rear
d h )end crashes) Dynamic Brake Support (DBS) is a related technology:
Supplements the vehicle’s brake output when the system believes that the driver has not applied enough brake pedal force (66% of rear end crashes)
Both technologies use information from forward-information from forward-looking sensors
Operate in situations where a rear end crash is likely orrear-end crash is likely or unavoidable

Pedestrian Crash Avoidance ResearchPedestrian Crash Avoidance Research
Phase 1 (2011/12)Phase 1 (2011/12) Develop test mannequins Adult and small child Correct visual appearance Correct radar cross sectionD l t t Develop apparatus to move mannequins
Phase 2 (2012/13)Phase 2 (2012/13) Determine capabilities of
current or near current systems Radar Video camera
Stereo video cameras Stereo video cameras

Heavy Vehicle Research (tractorHeavy Vehicle Research (tractor--trailers, trailers, y (y (straight trucks, and buses)straight trucks, and buses)
C h A id M i f Crash Avoidance – Main focus Stability Control Forward Collision Warning with Active Braking Vision Enhancement Departmental Motorcoach Plan
Crash avoidance technology research V2V Safety for Commercial
Heavy Vehicles (IntelliDrive)
16
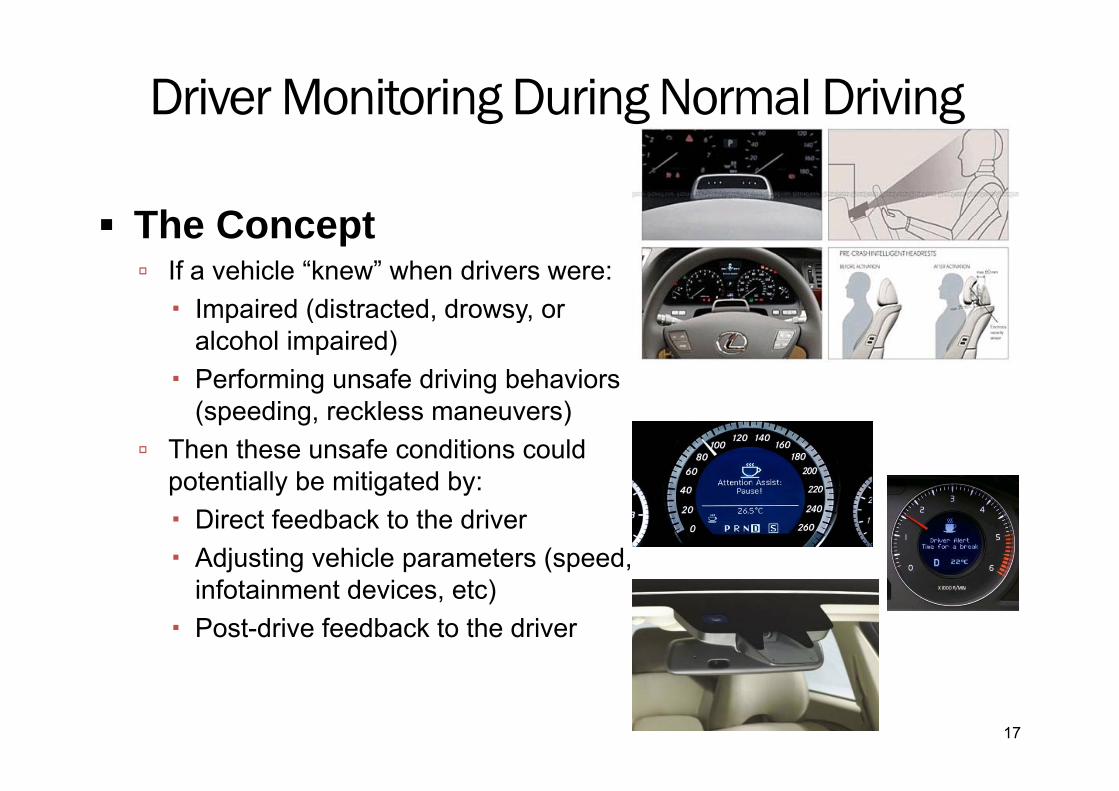
Driver Monitoring During Normal Driving
Th C t The Concept If a vehicle “knew” when drivers were: Impaired (distracted drowsy or Impaired (distracted, drowsy, or
alcohol impaired) Performing unsafe driving behaviors
(speeding, reckless maneuvers) Then these unsafe conditions could
potentially be mitigated by:potentially be mitigated by: Direct feedback to the driver Adjusting vehicle parameters (speed,
infotainment devices, etc) Post-drive feedback to the driver
17
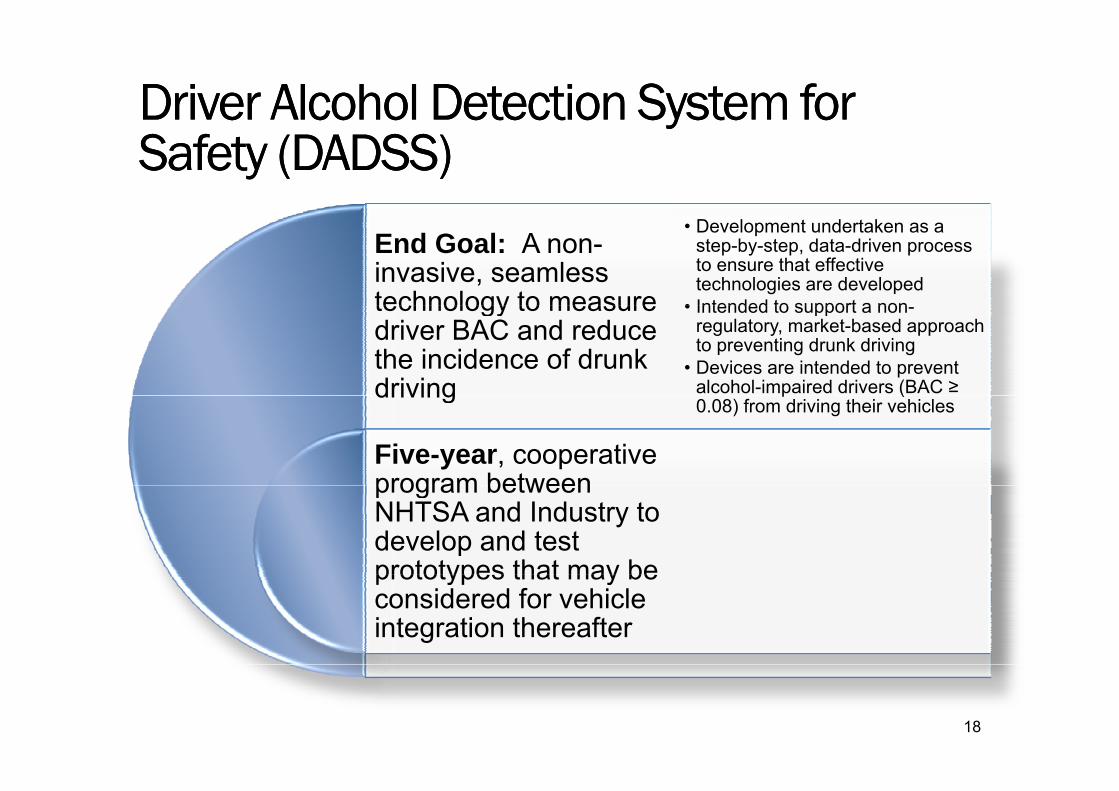
Driver Alcohol Detection System for Driver Alcohol Detection System for yySafety (DADSS)Safety (DADSS)
End Goal: A non-invasive, seamless technology to measure
• Development undertaken as a step-by-step, data-driven process to ensure that effective technologies are developed
• Intended to support a nontechnology to measure driver BAC and reduce the incidence of drunk driving
• Intended to support a non-regulatory, market-based approach to preventing drunk driving
• Devices are intended to prevent alcohol-impaired drivers (BAC ≥ driving
Five-year, cooperative program between
p (0.08) from driving their vehicles
program between NHTSA and Industry to develop and test prototypes that may beprototypes that may be considered for vehicle integration thereafter
18

ITS Opportunities for Higher Safety using DSRCITS Opportunities for Higher Safety using DSRCpp g y gpp g y g Primary DOT research initiatives: Vehicle to vehicle (V2V) ( )
communications Vehicle to infrastructure (V2I)
communications
Intersection Collision Avoidance
Crash reduction through: Driver advisories Pre-crash warnings Work Zone Notification Pre-crash warnings
NHTSA Agency decision: Light vehicles in 2013 g Heavy trucks in 2014
V2V+V2I may have theV2V V2I may have the potential to address 80% of the vehicle target crashes involving
unimpaired drivers*
19
p
*National Highway Traffic Safety Administration, October 2010, DOT HS 811 381

ITS Safety PilotITS Safety Pilotyy
Model Deployment – Ann Arbor, MI• Major road test and real world
implementation taking place 2011 thru 2013, involving:• Approximately 2800 vehicles• Approximately 2800 vehicles• Multiple vehicle types• Fully integrated systems and
aftermarket devicesR d id i f t t• Roadside infrastructure
• System wide interoperability testing• Also to test
• Prototype security mechanisms• Prototype security mechanisms• Device certification processes
• Driver Clinics6 l ti th US b i i• 6 locations across the US beginning in August 2011
• 100 drivers per locations• Experience Crash Warningsp g
20

CRASH WORTHINESSCRASH WORTHINESS RESEARCH
Areas Of Focus•Low Offset/Oblique Frontal•Child Safety Side Impact•Adaptive Restraints•Battery & Alt Fuel Safety•Dynamic Rollover•Dynamic Rollover
•Countermeasures for Lightweighted VehiclesVehicles•Modeling & Simulation
21
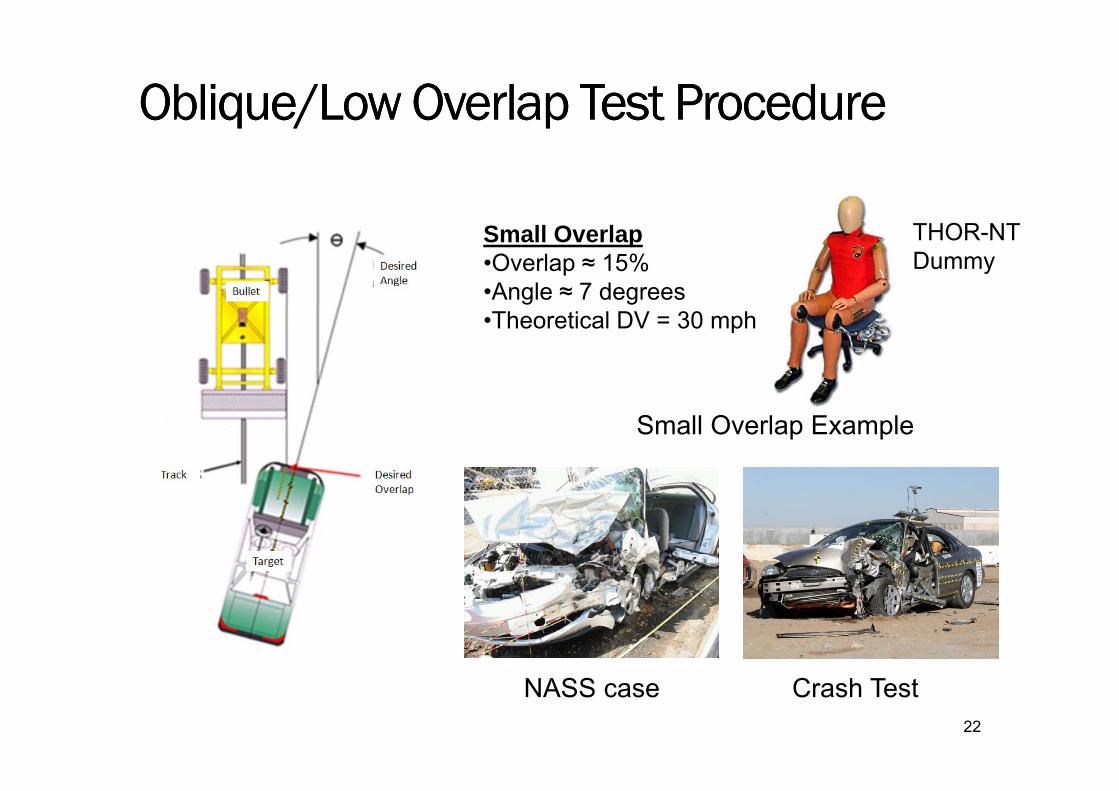
Oblique/Low Overlap Test ProcedureOblique/Low Overlap Test Procedureq / pq / p
Small Overlap•Overlap ≈ 15%•Angle ≈ 7 degrees
THOR-NT Dummy
•Theoretical DV = 30 mph
Small Overlap Example
22
NASS case Crash Test

Child Occupant ProtectionChild Occupant Protectionpp
Side Impact Test Procedure ModelingSide Impact Test Procedure Modeling
23
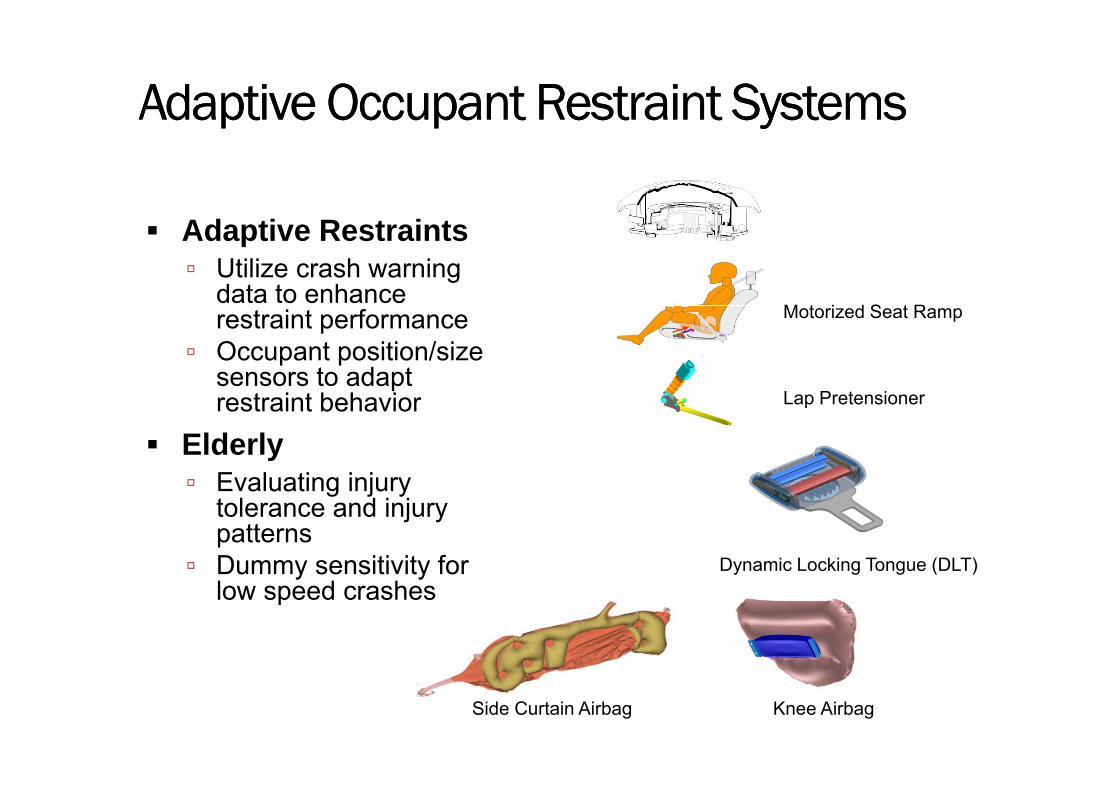
Adaptive Occupant Restraint SystemsAdaptive Occupant Restraint Systemsp p yp p y
Adaptive Restraints Utilize crash warning
data to enhance M t i d S t Rrestraint performance
Occupant position/size sensors to adapt
t i t b h i
Motorized Seat Ramp
Lap Pretensionerrestraint behavior Elderly Evaluating injury
Lap Pretensioner
Evaluating injury tolerance and injury patterns
Dummy sensitivity for Dynamic Locking Tongue (DLT)y ylow speed crashes
Side Curtain Airbag Knee Airbag
Battery Vehicles Battery Vehicles –– Research ActivitiesResearch ActivitiesBattery Vehicles Battery Vehicles Research ActivitiesResearch ActivitiesLi-ion Battery / Electric Vehicles
• Failure Modes and Effects Analysis (FMEA)• Charging Systems
• Temperature Cooling
• Analytical Process to Identify and prioritize failure mechanisms
• Contractor: Battelle Memorial, Draft Report due 12/2011 –(Industry and Peer Review to follow 2012)(Industry and Peer Review to follow 2012)
• Test Procedure development• Vehicle level performance tests for fault mechanisms
identified in FMEA
• 2 Contract Awards 24 month period of performance October 2011-2013
• SAE (Collaborative partners GM, Nissan, Honda, Toyota, Daimler)Daimler)
• Ford/Ricardo
25

Advanced Automatic Collision Advanced Automatic Collision Notification Notification AACNAACN ConceptNotification Notification -- AACNAACN
p Use onboard sensors to predict crash severity and a
probability of severe injury Areas of expected benefits Faster emergency response given earlier notification g y p g
and knowledge of crash location Improved pre-hospital response/care and hospital
dispatch decisions
? ?? ?
26
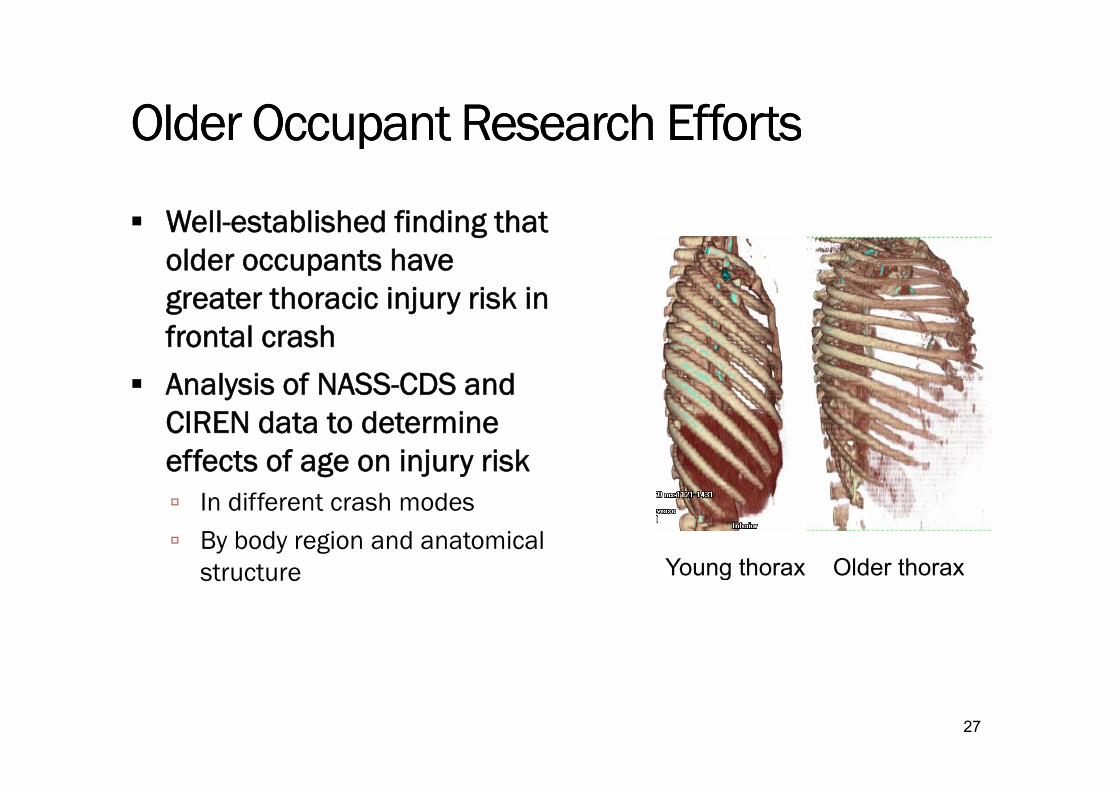
Older Occupant Research EffortsOlder Occupant Research EffortsOlder Occupant Research EffortsOlder Occupant Research Efforts
Well established finding that Well-established finding that older occupants have greater thoracic injury risk in greater thoracic injury risk in frontal crash
Analysis of NASS-CDS and yCIREN data to determine effects of age on injury risk In different crash modes By body region and anatomical
structure Young thorax Older thoraxstructure Young thorax Older thorax
27

The Autonomous Automated Vehicle?The Autonomous Automated Vehicle?
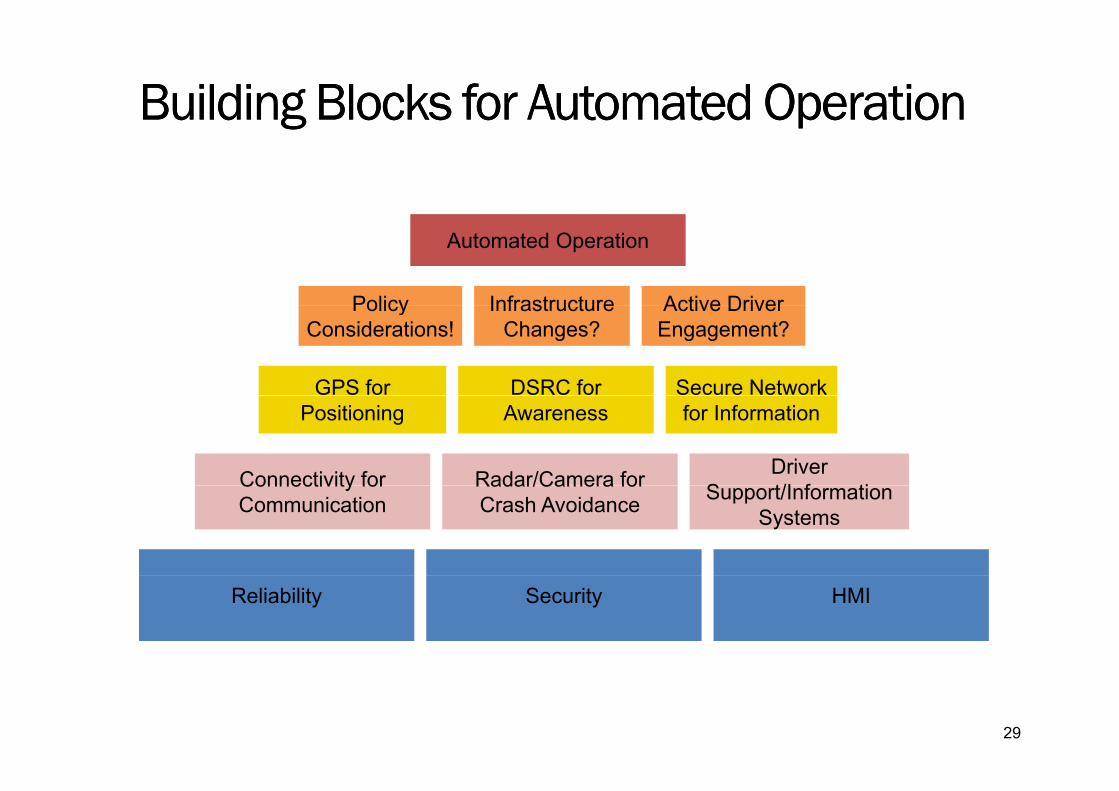
Building Blocks for Automated OperationBuilding Blocks for Automated Operationg pg p
Policy Active Driver
Automated Operation
Infrastructure
DSRC for GPS for Secure Network
Policy Considerations!
Active Driver Engagement?
Infrastructure Changes?
Radar/Camera forConnectivity for
AwarenessPositioning
Driver S t/I f ti
for Information
Radar/Camera for Crash Avoidance
Connectivity for Communication Support/Information
Systems
Reliability Security HMI
29

Automated Vehicles Automated Vehicles
Goal – maximize safety benefit and minimize risks with control systems and over-reliance
Approach Engage stakeholders Build knowledge base
D fi l l f t ti Define levels of automation Collaborate with SAE/industry on
voluntary approaches to standards Investigate driver HMI issues Create foundational understanding
for future NHTSA/DOT policy and
30
regulatory decisions
Enhanced Safety of Vehicles (ESV) ProgramEnhanced Safety of Vehicles (ESV) Programy ( ) gy ( ) gPurposeInternational Technical Conference organized byInternational Technical Conference organized by participating Governments from Asia Pacific, Europe, and North America to share and discuss latest vehicle safety research technologies.
Enhanced Objectives•Enhance participation and leadership from all participating Governments.
•Enhance technical content of papers
•Enhance Student Safety Technology Design Competition to build professional capacity and i t tinterest.
Begin focus on international collaborative research agenda to maximize resources and provide output for WP29Establish Journal publication format for plimited number of papers
31
32