nghiên cứu chuẩn ghép nối trong hệ thống nghi khí và vtĐ hàng hải
TRANSCRIPT

1
MỤC LỤC
LỜI NÓI ĐẦU .................................................................................................................. 3
CHƢƠNG 1: GIỚI THIỆU CÁC TRANG THIẾT BỊ VÀ YÊU CẦU GHÉP NỐI ........... 4
1.1 GIỚI THIỆU CHUNG ............................................................................................ 4
1.2 CÁC TRANG THIẾT BỊ NGHI KHÍ HÀNG HẢI VÀ VÔ TUYẾN ĐIỆN
TRÊN TÀU BIỂN ........................................................................................................ 4
1.2.1 Các thiết bị trong hệ thống GMDSS ................................................................. 4
1.2.2 Một số các thiết bị nghi khí hàng hải trên tàu ................................................. 11
1.3 YÊU CẦU GHÉP NỐI .......................................................................................... 14
CHƢƠNG 2: NGHIÊN CỨU CHUẨN GHÉP NỐI CƠ BẢN TRONG HỆ THỐNG
NGHI KHÍ HÀNG HẢI VÀ VTĐ TRÊN TÀU BIỂN HIỆN NAY ................................ 16
2.1 KHÁI QUÁT CHUẨN GHÉP NỐI CƠ BẢN DÙNG TRONG HỆ THỐNG
NGHI KHÍ HÀNG HẢI VÀ VÔ TUYẾN ĐIỆN TRÊN TÀU BIỂN HIỆN NAY . ..... 16
2.1.1Tiêu chuẩn IEC 61162 ..................................................................................... 16
2.1.2 Chuẩn ghép nối NMEA ................................................................................... 16
2.2 PHÂN TÍCH CHUẨN GHÉP NỐI NMEA 0183 .................................................. 17
2.2.1 Giới thiệu giao diện NMEA 0183 ................................................................... 17
2.2.2 Định dạng câu lệnh của MNEA 0183 ............................................................. 18
2.2.2 Kết nối với các thiết bị .................................................................................... 23
2.3 CÁC GIAO DIỆN VẬT LÝ .............................................................................. 29
2.3.1 Chuẩn truyền dẫn dữ liệu RS-232. .................................................................. 29
2.3.2 Chuẩn truyền dẫn dữ liệu RS-422 .................................................................. 31
2.4 MÔ PHỎNG DỮ LIỆU NMEA 0183 ................................................................... 32
2.4.1 Mô phỏng việc trao đổi dữ liệu bằng Phần mềm Hyper Terminal và phần
mềm GpcSim trên Windown 7 ................................................................................. 32
CHƢƠNG 3: XU HƢỚNG PHÁT TRIỂN CHUẨN GHÉP NỐI MỚI HIỆN NAY ........ 35
3.1 GIỚI THIỆU CHUNG .......................................................................................... 35
3.2 CẤU TRÚC MẠNG NMEA 2000 ........................................................................ 37
3.2.1 Các thành phần của mạng NMEA 2000 .......................................................... 37
3.2.2 Cấu trúc mạng ................................................................................................ 40
3.3 GIAO DIỆN VẬT LÝ ............................................................................................. 42

2
4.3 GIAO DIỆN VÀ MẠNG NMEA 2000 TRÊN TÀU THỦY .................................. 44
3.4 SỰ CHUYỂN ĐỔI GIỮA NMEA 0183 VÀ NMEA 2000 .................................... 45
KẾT LUẬN .................................................................................................................... 49
DANH MỤC CÁC TỪ VIẾT TẮT ................................................................................. 50
TÀI LIỆU THAM KHẢO............................................................................................... 50

3
LỜI NÓI ĐẦU
Ngày nay với sự phát triển của khoa học kỹ thuật các trang thiết bị nghi khí
hàng hải và vô tuyến hiện đại đƣợc trang bị rất nhiều trên tàu nhằm nâng cao hiệu
quả khai thác và đồng thời đảm bảo an toàn hàng hải. Từ một thiết bị ngƣời sĩ quan có
thể lấy đƣợc đầy đủ các thông tin phục vụ mục đích điều khiển, khai thác do các thiết
bị đƣợc ghép nối chặt chẽ với nhau. Do mỗi thiết bị nghi khí hàng hải và vô tuyến điện
có yêu cầu về chuẩn truyền thông với tính năng khác nhau là khác nhau và có nhiều
hãng sản xuất dẫn đến việc ra đời chuẩn ghép nối chung giữa các thiết bị này. Chỉ khi
hiểu đƣợc chuẩn ghép nối ta mới có thể ghép nối các thiết bị này đƣợc với nhau. Chính
vì lý do trên mà em đã lựa chọn đề tài tốt nghiệp: “Nghiên cứu các chuẩn ghép nối
ứng dụng trong hệ thống nghi khí hàng hải và vô tuyến điện trên tàu biển hiện
nay”.
Nội dung chính trong đề tài của em trình bày nhƣ sau:
- Chƣơng 1: Giới thiệu các trang thiết bị và yêu cầu ghép nối.
- Chƣơng 2: Nghiên cứu các chuẩn ghép nối cơ bản trong hệ thống nghi khí
hàng hải và vô tuyến điện trên tàu.
- Chƣơng 3: Xu hƣớng phát triển chuẩn ghép nối mới hiện nay.
Trong quá trình thực hiện đồ án em đã nhận đƣợc sự chỉ bảo tận tình của thầy
giáo –ThS. NGUYỄN NGỌC SƠN, các anh chị kỹ sƣ ở Công ty thƣơng mại và dịch
vụ kỹ thuật hàng hải MTS. Cùng với sự nỗ lực của bản thân và lời động viên giúp đỡ
của gia đình, bạn bè em đã hoàn thành đồ án đúng tiến độ. Em xin chân thành cảm ơn
sự hƣớng dẫn của thầy,gia đình và bạn bè. Nhân đây em xin bày tỏ lòng biết ơn sâu sắc
tới các thầy, cô giáo bộ môn Điện tử viễn thông, khoa Điện-Điện tử tàu biển trƣờng
Đại học hàng hải Việt Nam đã dạy dỗ, đào tạo em suốt năm năm qua.
Hải Phòng, ngày 25 tháng02 năm 2013
Sinh Viên : NGUYỄN XUÂN TRƯỜNG
Lớp : ĐTV 49-ĐH

4
CHƯƠNG 1
GIỚI THIỆU CÁC TRANG THIẾT BỊ VÀ YÊU CẦU
GHÉP NỐI
1.1 GIỚI THIỆU CHUNG
Ngày nay dịch vụ vận tải biển đang phát triển nhanh trở thành ngành kinh tế thế
mạnh của đất nƣớc. Rất nhiều các con tàu lớn ra đời với đội ngũ tàu biển ngày càng
tăng nhằm đáp ứng nhu cầu vận tải biển lớn với giá thành vận chuyển thấp. Với xu
hƣớng phát triển đó, mật độ tàu bè tăng cao thì yêu cầu về an toàn hàng hải ngày càng
đƣợc chú trọng. Công ƣớc quốc tế về an toàn sinh mạng con ngƣời trên biển (SOLAS)
1974 liên tục đƣợc bổ sung và sửa đổi nhằm đảm bảo an toàn hàng hải. Bên cạnh đó sự
phát triển của công nghệ thông tin và truyền thông đã cho ra đời rất nhiều các thiết bị
nghi khí hàng hải và vô tuyến điện trên biển để đáp ứng công ƣớc trên đồng thời giúp
ngƣời sĩ quan buồng lái khai thác dễ ràng và chính xác, tránh đâm va tai nạn trên biển.
Từ một thiết bị ngƣời sĩ quan có thể lấy đƣợc đầy đủ các thông tin phục vụ mục đích
điều khiển, khai thác do các thiết bị đƣợc ghép nối chặt chẽ với nhau. Việc ghép nối
phải đảm bảo sao cho việc trao đổi thông tin giữa các thiết bị là dễ dàng nhất. Do mỗi
thiết bị nghi khí hàng hải và vô tuyến điện có yêu cầu về chuẩn truyền thông với tính
năng khác nhau là khác nhau và việc sản xuất từ nhiều các công ty khác nhau dẫn đến
yêu cầu cần chuẩn ghép nối chung giữa các thiết bị là rất cần thiết. Xuất phát từ yêu
cầu đó các tổ chức quốc tế đã cho ra đời các chuẩn ghép nối hàng hải chung giữa các
thiết bị nghi khí hàng hải và vô tuyến điện trên tàu. Ở đề tài này em xin trình bày một
số chuẩn ghép nối sử dụng trong các thiết bị nghi khí hàng hải và vô tuyến điện trên
tàu biển hiện nay cùng với xu hƣớng phát triển của các chuẩn này.
1.2 CÁC TRANG THIẾT BỊ NGHI KHÍ HÀNG HẢI VÀ VÔ TUYẾN
ĐIỆN TRÊN TÀU BIỂN
1.2.1 Các thiết bị trong hệ thống GMDSS
Nhƣ ta đã biết các trang thiết bị thông tin trong hệ thống GMDSS trang bị trên
tàu đƣợc quyết định bởi vùng hoạt động của tàu chứ không phải theo kích cỡ của tàu.
Bên cạnh đó tàu hoạt động trên biển bắt buộc phải đƣợc trang bị các thiết bị hoạt động
sau đây trong hệ thống GMDSS mà không phụ thuộc vào vùng biển mà tàu hoạt động:
Một máy vô tuyến VHF có khả năng phát và thu liên tục bằng DSC trên kênh
70. Có các tần số của kênh thoại 156.8MHz (kênh 16), 156,650MHz (kênh 13) và
156.3MHz(kênh 6).
Một máy vô tuyến có khả năng trực canh liên tục trên kênh 70 VHF, nó có thể
tách riêng hoặc kết hợp với thiết bị thu phát VHF thoại.

5
Thiết bị phản xạ radar – Radar transponder hoạt động trên tần số 9GHz phục vụ
cho tìm kiếm cứu nạn – SART.
Thiết bị thu nhận thông tin an toàn hàng hải –MSI- máy thu NAVTEX, nếu tàu
hoạt động trên vùng biển có dịch vụ NAVTEX quốc tế. Nếu tàu hoạt động trong vùng
biển không có các dịch vụ NAVTEX quốc tế thì phải đƣợc trang bị một máy thu gọi
nhóm tăng cƣờng EGC.
Phao định vị vô tuyến qua vệ tinh EPIRB có khả năng phát báo động cấp cứu
qua vệ tinh quỹ đạo cực hoạt động trên tần số 406MHz. Phao định vị vô tuyến này
phải đƣợc đặt ở vị trí dễ dàng, thuận tiện có khả năng hoạt động bằng tay, tự nổi khi
tàu đắm và tự động hoạt động khi nổi.
Trang thiết bị vô tuyến khi tàu hoạt động ở vùng biển A1:
Tất cả các tàu khi hoạt động trong vùng biển A1, ngoài các trang thiết bị quy
định chung ở mục trên còn phải buộc trang bị các thiết bị vô tuyến điện sau đây, có
khả năng báo động cấp cứu chiều từ tàu đến bờ:
VHF DSC, EPIRB, thiết bị thu phát MF/HF gọi chọn số DSC. Với các thiết bị
VHF cũng phải có khả năng phát và thu bằng thoại những thông tin thông thƣờng .
Trang thiết bị vô tuyến điện cho tàu hoạt động vùng biển A1 và A2:
Tất cả các tàu hoạt động ngoài vùng biển A1 nhƣng trong vùng biển A2, ngoài
các trang thiết bị quy định chung phải trang bị thêm:
Thiết bị MF có thể phát tín hiệu cấp cứu bằng DSC trên tần số 2178.5KHz và
trên tần số 2182 KHz bằng thông tin vô tuyến điện thoại.
Máy thu trực canh DSC có khả năng duy trì trực canh liên tục trên tần số
2187.5 KHz.
Một thiết bị phát tín hiệu cấp cứu từ tàu đến bờ có thể là EPIRB-406MHz hoặc
thiết bị HF/DSC, hoặc 1 trạm IMARSAT.
Thiết bị thu phát cho mục đích thông tin thông thƣờng bằng vô tuyến điện thoại,
hoặc truyền chữ băng hẹp NBDP hoạt động ở dải tần số từ 4000KHZ- 27500KHZ,
hoặc 1 trạm INMARSAT.
Trang thiết bị cho tàu hoạt động ở vùng biển A1, A2 và A3
Tất cả các tàu hoạt động ngoài vùng biển A1 và A2 nhƣng trong vùng biển A3

6
ngoài các trang thiết bị quy định chung nhƣ trên sẽ phải trang bị theo 1 trong 2 cách
lựa chọn sau:
Lựa chọn 1:
Trạm INMARSAT có khả năng :
Phát và thu những thông tin cấp cứu và an toàn bằng truyền chữ trực tiếp băng
hẹp.
Nhận cuộc gọi ƣu tiên cấp cứu duy trì trực canh với những báo động cấp cứu
chiều từ bờ tới tàu.
Phát và thu các thông tin thông thƣờng bằng vô tuyến điện thoại hoặc truyền
chữ băng hẹp.
Một thiết bị MF có thể phát tín hiệu cấp cứu bằng DSC trên tần số 2178.5KHz
và trên tần số 2182 KHz bằng thông tin vô tuyến điện thoại.
Máy thu trực canh DSC có khả năng duy trì trực canh liên tục trên tần số
2187.5 KHz.
Một thiết bị phát tín hiệu cấp cứu từ tàu đến bờ có thể là EPIRB-406MHz hoặc
thiết bị HF/DSC, hoặc 1 trạm IMARSAT
Lựa chọn 2:
Một thiết bị thu phát MF/HF cho mục đích thông tin cấp cứu và an toàn trên tất
cả các tần số cấp cứu và an toàn trong dải tần từ 1605KHz-4000KHz và 400KHz-
27500KHz bằng phƣơng thức thông tin DSC, thoại và truyền chữ trực tiếp băng hẹp.
Một thiết bị có khả năng duy trì việc trực canh bằng DSC trên tần số 2187.5
KHz và 8414.5KHz và ít nhất 1 trong các tần số cấp cứu và an toàn DSC sau :
4207.5KHz, 6312KHz, 12577KHz hoặc 16804.5KHz .
Thiết bị phát tín hiệu cấp cứu chiều từ tàu tới bờ. Ngoài thiết bị thu phát MF/HF
có thể là EPIRB 406MHz hoặc 1 trạm IMARSAT.
Thiết bị thu phát MF/HF có dải tần 1605KHz-4000KHz và 400KHz-
27500KHz, phục vụ cho các dịch vụ thông tin thông thƣờng bằng phƣơng thức thông
tin thoại hoặc truyền chữ băng hẹp.
Trang thiết bị vô tuyến điện cho tàu hoạt động ở vùng biển A1, A2, A3 và A4
Tất cả các tàu hoạt động trên tất cả các vùng biển ngoài trang thiết bị quy định
chung sẽ phải trang bị thêm :

7
Thiết bị thu phát MF/HF sử dụng cho mục đích an toàn và cứu nạn, có các
phƣơng thức thông tin gọi chọn số DSC, thoại và truyền chữ băng hẹp 1605KHz-
4000KHz và 400KHz- 27500KHz.
Máy thu trực canh DSC trên tần số 2187.5 KHz và 8414.5KHz và ít nhất 1
trong các tần số sau : 4207.5KHz, 6312KHz, 12577KHz hoặc 16804.5KHz.
Thiết bị EPIRB/406MHz thu phát tín hiệu cấp cứu chiều từ tàu-bờ.
Thiết bị thu phát MF/HF có dải tần 1605KHz-4000KHz và 400KHz-
27500KHz, phục vụ cho các dịch vụ thông tin thông thƣờng bằng phƣơng thức thông
tin thoại hoặc truyền chữ băng hẹp.
Một số các thiết bị GMDSS trong thực tế được trang bị trên các tàu hiện nay:
a) Máy VHF STR600A
Hình 1.1 : Thiết bị VHF STR6000A
Thiết bị VHF STR600A đƣợc thiết kế để kết nối với 2 anten. Một anten dùng để
thu phát tín hiệu thoại và phát tín hiệu DSC, một anten thu trực canh DSC luôn sẵn
sàng thu các bức điện DSC trên kênh 70 VHF. Nguồn cung cấp cho thiết bị là 1 bộ
nguồn chuẩn 13.8VDC. Các thông số cơ bản của máy nhƣ sau:
- Tần số phát từ 156.025 MHz đến 157.425MHz.
- Tần số thu từ 156.050 MHz đến 163.275 MHz.
- Chế độ phát xạ : G3E và G2B.
- Trở kháng anten: 50Ω
- Công suất phát : 25W ( mức cao) và 1W (mức thấp
b) Thiết bị SART 9G ( SAMYUNG)
Bộ phản xạ Radar dùng trong tìm kiếm cứu nạn- SART là phƣơng tiện chính trong
hệ thống GMDSS để xác định vị trí của tàu bị nạn hoặc xuồng cứu sinh của các tàu bị
nạn đó. Theo công ƣớc của SOLAS/88 sửa đổi tất cả các tàu chạy biển đều phải trang
bị SART. Các thiết bị SART hoạt động ở dải 9GHz (băng X) sẽ tạo ra 1 chuỗi các tín
hiệu phản xạ khi có sự kích hoạt của bất kỳ một tín hiệu của Radar hoạt động ở băng

8
tần X nào. Khi hoạt động trong tình huống cấp cứu, SART sẽ đáp lại các xung kích
thích của Radar bằng cách phát ra các tín hiệu tần số quét để tạo ra 1 đƣờng thẳng trên
màn hình Radar gồm 12 nét đứt từ tâm ra vị trí của SART. Thông số của cơ bản của
thiết bị SART 9G ( SAMYUNG) này nhƣ sau:
- Tần số : 9.2 ~9.5 GHz.
- Công suất phát xạ lớn hơn 400mW (26dBm).
- Chế độ Standby : 96h.
- Phát báo động cấp cứu liên tục trong vòng 8h
- Nhiệt độ: hoạt động -20 đến 55 , lƣu trữ -30 đến 65 .
Hình 1.2 : Thiết bị SART 9G của hãng SAMYUNG
c) Thiết bị MF/HF SRG 3150D/DN
Thiết bị SRG3150D/DN của hãng SAMYUNG sản xuất hiện nay đƣợc nhiều
tàu trang bị do giá thành và tính ổn định của thiết bị. Ngoài ra thiết bị còn đƣợc kết nối
với hệ thống NBDP, có thể kể tới 1 số thông số cơ bản của máy nhƣ sau.
- Hãng sản xuất: SAMYUNG.
- Dải tần: Tx: 1,6 - 27,5 MHz ; Rx: 500KHz - 29,9999MHz
- Nguồn cung cấp 24 VDC.
- Công suất phát: + Đối với SRG – 1350D/DN: JBE(150W), FIB (100W), H3E
(75W).

9
Hình 1.3 : Thiết bị MF/HF SRG-3150D/DN
d) EPIRB SEP 406
EPIRB là hệ thống tìm kiếm và cứu nạn toàn cầu trên các tần số 121.5MHz và
406.025MHz. Các thông số chính của EPIRB nhƣ sau:
- Sử dụng hai tần số là 121.5 Mhz (VHF EIPRB) và 406.025 Mhz.
- Công suất bức xạ nhỏ. Với EIPRB công suất bức xạ 5W, chu kỳ lặp lại 50s,
thời gian phát 0.5s/lần.
- Thời gian phát lên đến 48h ở nhiệt độ -20 độ và 80h ở nhiệt độ +20 độ.
Hình 1.4 : EPIRB SEP406
e) IMARSAT MINI-C FELCOM16
Thông số cơ bản của máy nhƣ sau:
- Tần số phát : 1626.5-1646.5MHz
- Tần số thu : 1530- 1545.0 MHz
- Tần số thu GPS : 1575.42MHz
- Độ rộng kênh 5KHz

10
- Nguồn cung cấp : 12-14 VDC, 60W (Tx), 10W (Rx)
- Dải nhiệt độ làm việc : -150 - +55
0
Hình 1.5 : IMARSAT MINI-C FELCOM16
f) NAVTEX NCR 333.
Navtex quốc tế là một dịch vụ truyền chữ trực tiếp trên tần số 518khz-là tần số
navtex quốc tế, sử dụng kỹ thuật truyền chữ trực tiếp băng hẹp NPDB và chế độ phát
FEC để truyền những thông tin an toàn hàng hải MSI. Dịch vụ navtex bao gồm khí
tƣợng và thời tiết, các loại thông báo hàng hải các thông tin về khẩn cấp và an toàn…,
sẽ truyền tới tất cả các loại tàu nằm trong vùng phủ sóng Navtex. Trên các tàu hiện nay
thƣờng trang bị máy thu Navtex NCR 333 của hãng JRC, thông số cơ bản của máy
nhƣ sau:
Hình 1.6 NAVTEX NCR333
- Tần số thu : 490khz, 518khz, 4209.5khz
- Nguồn cung cấp : 10,8 – 35 VDC
- Nhiệt độ hoạt động : -15o- 55
oC

11
1.2.2 Một số các thiết bị nghi khí hàng hải trên tàu
Bên cạnh các thiết bị GMDSS các tàu cần đƣợc trang thiết bị 1 số các thiết bị
nghi khí hàng hải nhƣ sau:
Tùy theo kích thƣớc của tàu các tàu cần trang bị thêm các thiết bị nghi khí sau:
Một la bàn từ tiêu chuẩn đƣợc hiệu chuẩn chính xác hoặc phƣơng tiện khác độc
lập với bất kỳ nguồn năng lƣợng nào để xác định hƣớng tàu và hiển thị đọc đƣợc tại vị
trí lái tàu chính.
Một vành chia độ hoặc mặt la bàn hoặc phƣơng tiện khác độc lập với bất kỳ
nguồn năng lƣợng nào đƣợc chia độ theo phƣơng ngang 3600.
Một phƣơng tiện hiệu chỉnh hƣớng tàu và phƣơng vị chính xác tại mọi thời
điểm.
Các hải đồ và ấn phẩm hàng hải để lập kế hoạch biểu thị hành trình tàu theo
hành trình dự tính; có thể dùng hệ thống hải đồ điện tử .
Một thiết bị thu hệ thống thông tin hàng hải toàn cầu hoặc hệ thống vô tuyến
hàng hải mặt đất, hoặc các phƣơng tiện khác phù hợp cho việc sử dụng trong suốt thời
gian hành trình để cung cấp và cập nhật tự động vị trí tàu. Hiện nay các tàu thƣờng
đƣợc trang bị các thiết bị cập nhật vị trí qua hệ thống GPS. Có thể kể 1 số thiết bị GPS
nhƣ máy GPS KGP-913 của hãng KODEN, máy GPS NAVIGATOR GP-32 của hãng
FURUNO,..v.v.
Radar để quan sát các phƣơng tiện khác, xác định và chỉ báo khoảng cách và vị
trí của thiết bị phát báo radar và các tàu, mục tiêu, phao khác nổi trên mặt biển, bờ
biển và các ký hiệu hàng hải nhằm hỗ trợ hàng hải và tránh va, hoạt động ở cả 9 và
3GHz. Với sự trợ giúp của radar trên tàu, tai nạn có thể đƣợc ngăn ngừa. Màn hình
radar hiển thị tất cả các mục tiêu hiện thời xung quanh, tuỳ thuộc theo tầm xa. Với tất
cả các mục tiêu đƣợc hiển thị rõ ràng trên màn hình nhƣ vậy, việc hàng hải và giám sát
vị trí các tàu khác trở nên dễ dàng và thuận tiện hơn. Nguyên lý Radar phát hiện mục
tiêu bằng cách phát đi các xung siêu cao tần cực ngắn vào không gian, thu xung phản
xạ trở về từ các mục tiêu và thể hiện các xung phản xạ đó thành các mục tiêu trên màn
hình. Radar hàng hải cho ta hai thông số của mục tiêu, đó là góc mạn và khoảng cách
từ mục tiêu tới tàu ta, kết hợp với la bàn sẽ cho phƣơng vị mục tiêu. Một số radar
thƣờng sử dụng trên tàu hiên nay nay nhƣ RADAR FURUNO 2117, FR 1505MKIII..
Một thiết bị tự động nhận dạng AIS (Automatic Identification System) cung
cấp tự động trạng thái hàng hải của tàu và các thông tin an toàn khác. Các thiết bị AIS

12
hoạt động trên dải tần VHF hoặc có khả năng kết hợp với thiết bị Inmarsat-C thông
qua hệ thống Inmarsat-C nhằm mục đích:
- Cung cấp dữ liệu nhận dạng cảu các phƣơng tiện vận tải: tàu, máy bay, các trạm
bờ…
- Theo dõi, quản lý quá trình lƣu thông hàng hải.
- Thực hiện trao đổi thông tin đơn giản giữa các phƣơng tiện với nhau hoặc giữa
phƣơng tiện với bờ.
- Phục vụ tìm kiếm cứu nạn, an toàn hàng hải, an ninh, tìm kiếm cứu nạn, bảo vệ
môi trƣờng biển…
Hệ thống tự động ghi dữ liệu hành trình VDR (Voyage Data Recorder) (đối với
các tàu hàng có tổng dung tích từ 20000 trở lên) đƣợc thiết kế và lắp đặt trên tàu nhằm
trợ giúp cho quá trình điều tra các thƣơng vong, tai nạn hàng hải. Ngoài chức năng ghi
lại các thông tin dữ liệu trên tàu phục vụ cho quá trình điều tra thì chủ tàu còn có thể
sử dụng hệ thống VDR nhƣ một công cụ hỗ trợ quản lý tàu. Khi có hệ thống VDR trên
tàu, các thuyền viên sẽ làm việc cẩn thận, nghiêm túc và có tinh thần trách nhiệm cao
hơn. Các nguyên nhân chính của sự cố hàng hải xảy ra đối với tàu sẽ đƣợc xác định
nhanh chóng và dễ dàng hơn khi giải mã, phân tích các thông tin mà hệ thống VDR đã
ghi lại. Các thông tin của các thiết bị đƣợc ghép nối với hệ thống VDR nhƣ: thời gian,
vị trí, âm thanh trên buồng lái, các cuộc liên lạc thoại, hình ảnh radar…. trƣớc khi tàu
xảy ra sự cố sẽ đƣợc ghi lại đầy đủ, làm cơ sở cho việc điều tra sự cố, làm rõ nguyên
nhân tai nạn và rút ra bài học khi hàng hải.
Một thiết bị đo tốc độ hành trình hoặc phƣơng tiện khác để chỉ báo tốc độ và
hành trình của tàu nhằm xác đinh nguy cơ đâm va.
Ngoài ra còn 1 số thiết bị khác nhƣ máy đo tốc độ gió, đo sâu, trực ca buồng lái
BNWAS...v.v..
Một số trang thiết bị nghi khí hàng hải đƣợc sử dụng trong tàu biển hiện nay.
BỘ GHI DỮ LIỆU HÀNH TRÌNH HLD- S2 SVDR

13
Hình 1.7 : Các thiết bị nghi khí được sử dụng chủ yếu trên các tàu hiện nay.
MÁY GPS KGP-913 TRỰC CA BUỒNG LÁI (BNWAS)
RADAR FURUNO 2117
THIẾT BỊ TỰ ĐỘNG NHẬN DẠNG AIS SI-30
14
1.3 YÊU CẦU GHÉP NỐI
Trên các tàu biển hiện nay để nâng cao khả năng khai thác, các thiết bi nghi khí
hàng hải và các thiết bị vô tuyến điện thƣờng đƣợc kết nối với nhau. Việc kết nối nhƣ
vậy là rất cần thiết gúp cho các thiết bị đƣợc khai thác một cách tốt nhất đảm bảo an
toàn hàng hải cao. Để thấy rõ hơn sự cần thiết giữa việc ghép nối các thiết bị với nhau
ta sẽ phân tích thiết bị tự động nhận dạng AIS trong hình vẽ dƣới.
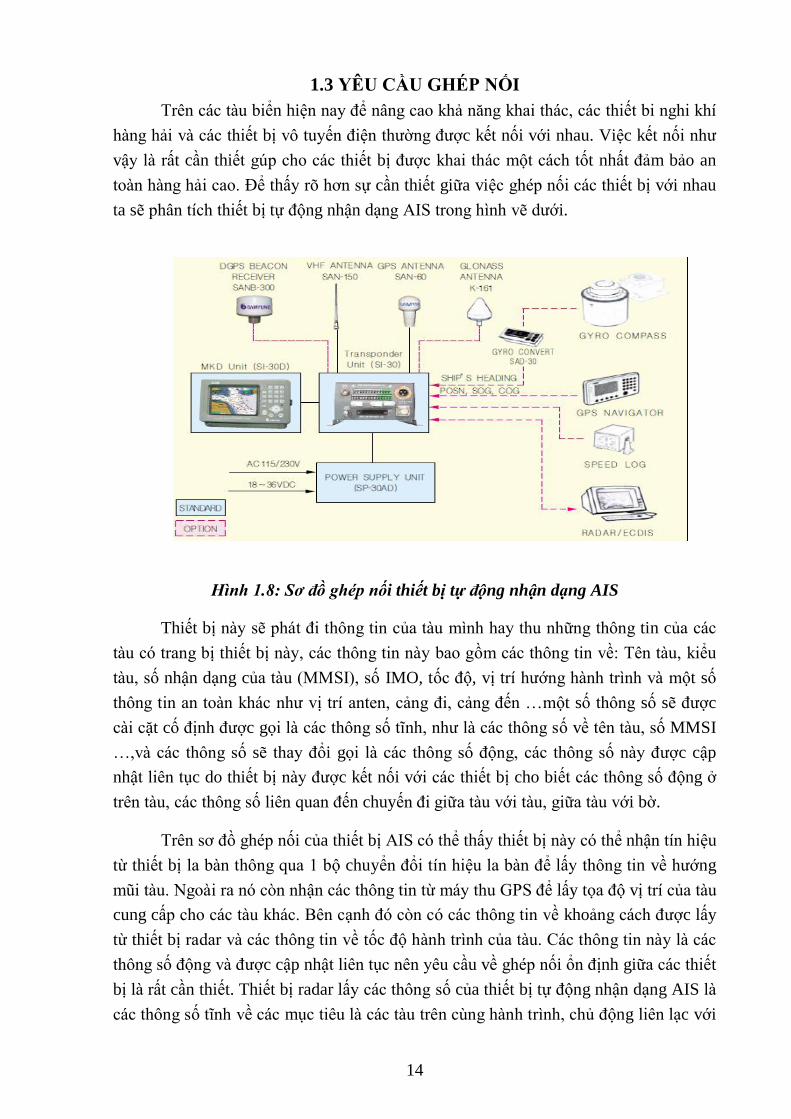
Hình 1.8: Sơ đồ ghép nối thiết bị tự động nhận dạng AIS
Thiết bị này sẽ phát đi thông tin của tàu mình hay thu những thông tin của các
tàu có trang bị thiết bị này, các thông tin này bao gồm các thông tin về: Tên tàu, kiểu
tàu, số nhận dạng của tàu (MMSI), số IMO, tốc độ, vị trí hƣớng hành trình và một số
thông tin an toàn khác nhƣ vị trí anten, cảng đi, cảng đến …một số thông số sẽ đƣợc
cài cặt cố định đƣợc gọi là các thông số tĩnh, nhƣ là các thông số về tên tàu, số MMSI
…,và các thông số sẽ thay đổi gọi là các thông số động, các thông số này đƣợc cập
nhật liên tục do thiết bị này đƣợc kết nối với các thiết bị cho biết các thông số động ở
trên tàu, các thông số liên quan đến chuyến đi giữa tàu với tàu, giữa tàu với bờ.
Trên sơ đồ ghép nối của thiết bị AIS có thể thấy thiết bị này có thể nhận tín hiệu
từ thiết bị la bàn thông qua 1 bộ chuyển đổi tín hiệu la bàn để lấy thông tin về hƣớng
mũi tàu. Ngoài ra nó còn nhận các thông tin từ máy thu GPS để lấy tọa độ vị trí của tàu
cung cấp cho các tàu khác. Bên cạnh đó còn có các thông tin về khoảng cách đƣợc lấy
từ thiết bị radar và các thông tin về tốc độ hành trình của tàu. Các thông tin này là các
thông số động và đƣợc cập nhật liên tục nên yêu cầu về ghép nối ổn định giữa các thiết
bị là rất cần thiết. Thiết bị radar lấy các thông số của thiết bị tự động nhận dạng AIS là
các thông số tĩnh về các mục tiêu là các tàu trên cùng hành trình, chủ động liên lạc với

15
các tàu này đảm bảo an toàn hàng hải. Nhƣ vậy nhờ có sự ghép nối giữa các thiết bị
mà sĩ quan buồng lái có thể đƣa ra các thao tác điều khiển chính xác hơn đảm bảo an
toàn hàng hải.
Nói tóm lại tất cả các trang thiết bị nghi khí và vô tuyến điện cần đƣợc kết nối
với nhau 1 cách chặt chẽ để khai thác một cách hiệu quả nhất . Mỗi thiết bị đều có cấu
trúc dữ liệu khác nhau nên việc tìm hiểu và ghép nối để chúng có thể trao đổi dữ liệu
với nhau là rất cần thiết. Ở chƣơng 2 ta sẽ tìm hiểu chuẩn ghép nối cụ thể, cấu trúc vật
lý và cấu trúc khung dữ liệu của chuẩn này.

16
CHƯƠNG 2
NGHIÊN CỨU CHUẨN GHÉP NỐI CƠ BẢN TRONG HỆ
THỐNG NGHI KHÍ HÀNG HẢI VÀ VÔ TUYẾN ĐIỆN TRÊN
TÀU BIỂN HIỆN NAY
2.1 KHÁI QUÁT CHUẨN GHÉP NỐI CƠ BẢN DÙNG TRONG HỆ
THỐNG NGHI KHÍ HÀNG HẢI VÀ VTĐ TRÊN CÁC TÀU BIỂN.
2.1.1Tiêu chuẩn IEC 61162
IEC là viết tắt của ( International Electrotechnical Commission ) ủy ban kỹ
thuật điện quốc tế ra đời để thúc đẩy hợp tác quốc tế về tiêu chuẩn hóa lĩnh vực điện
và điện tử. IEC ra các tiêu chuẩn trong rất nhiều các lĩnh vực liên quan đến điện và
điện tử khác nhau nhƣ tiêu chuẩn về các thiết bị điện công nghiệp, xây dựng và hàng
hải…Dựa vào các tiêu chuẩn này các hãng sản xuất thiết bị hay các tổ chức liên quan
đến điện và điện tử đƣa ra các thiết bị hoặc tài liệu tuân theo các quy định cơ bản của
tổ chức này. Về lĩnh vực hàng hải IEC đƣa ra loạt các tiêu chuẩn về điện và điện tử
khác nhau trong đó có tiêu chuẩn liên quan đến việc ghép nối các thiết bị nghi khí
hàng hải và vô tuyến điện, cụ thể là tiêu chuẩn IEC 61162. IEC 61162 chia ra làm ba
phần IEC 61162-1, IEC 61162-2, IEC 61162-3 tùy vào các trang thiết bị nghi khí hàng
hải và vô tuyến điện trên tàu mà đáp ứng các yêu cầu của IEC 61162 liên quan đến
lĩnh vực ghép nối. IEC đƣợc liên kết chặt chẽ với MNEA, trong đó các quy định về
ghép nối giữa các thiết bị không có sự khác biệt nhiều lắm ví dụ nhƣ các định nghĩa
thiết bị Talker, Listenes…
2.1.2 Chuẩn ghép nối NMEA
NMEA (National Marine Electronics Association) là chuẩn hàng hải do tổ chức
điện tử hàng hải của Mỹ đƣa ra và có liên hệ chặt chẽ với ủy ban kỹ thuật điện quốc tế
IEC. Chuẩn này ra đời để truyền dữ liệu giữa các thiết bị hàng hải gúp chúng có thể
trao đổi thông tin dễ ràng với nhau. Từ khi ra đời chuẩn NMEA luôn đƣợc sửa đổi và
hoàn chỉnh, đến nay đƣợc biết đến với NMEA 0180, NMEA 0182 và NMEA 0183.
Hiện nay trên một số các tàu cũ, chuẩn NMEA 0180 hoặc NMEA 0182 vẫn đƣợc dùng
nhƣng phổ biến và tất cả các thiết bị hàng hải đều tƣơng thích là NMEA 0183. Tuy
nhiên NMEA 0183 cũng có trong nhiều biên bản khác nhau – mới nhất là NMEA 0183
phiên bản 3.0. Tiêu chuẩn này quy định cụ thể cả các kết nối điện, phƣơng pháp truyền
thông truyền dữ liệu và cả định dạng của các câu dữ liệu mang thông tin.Thông tin
quan trọng đƣợc dịch thành các câu NMEA dữ liệu tiêu chuẩn gửi tới nhiều thiết bị
khác nhau trên cùng một 1 đƣờng truyền. Các thiết bị chỉ nhận câu liên quan đến thông
tin mà mình cần. Ví dụ một radar thông thƣờng sẽ có thể đọc Lat /Long thông qua
chuẩn NMEA vì điều này có thể đƣợc sử dụng để nâng cao hiệu suất của radar.Mặt

17
khác nó không thể đọc dữ liệu về độ sâu vì thông tin này lại không đƣợc dùng trong
radar…
2.2 PHÂN TÍCH CHUẨN GHÉP NỐI NMEA 0183
2.2.1 Giới thiệu giao diện NMEA 0183
NMEA 0183 là chuẩn đƣợc thiết kế cho phép truyền dữ liệu nối tiếp một chiều
từ thiết bị Talker cho một hoặc nhiều thiết bị Listenes. Dữ liệu ở dạng mã ASC II bao
gồm các thông tin nhƣ vị trí, tốc độ, độ sâu… và độ dài 1 gói tin có thể từ 20-70 ký tự .
Các thiết bị Talker và Listenes đƣợc định nghĩa nhƣ sau :
- Talker : là các thiết bị có thể gửi dữ liệu đến các thiết bị khác. Thiết bị
Talker đƣợc nhận dạng bởi 2 ký tự nhớ. Ví dụ nhƣ GP (tín hiệu GPS), AI (
tín hiệu AIS)..
- Listenes : là các thiết bị nhận dữ liệu từ thiết bị khác.
Dữ liệu theo chuẩn NMEA 0183 đƣợc truyền nối tiếp không đồng bộ với các
thông số sau :
- Tốc độ Baud: 4800
- Số bít dữ liệu: 8 (bít 7 là bit 0)
- Bít Stop: One
- Bít Parity: None
Hình 2.1 : Cấu trúc khung dữ liệu
Tất cả các dữ liệu đƣợc truyền đi dƣới dạng mã ASC II trong đó bít thứ 7 của
DATA BITS luôn luôn đƣợc truyền đi với giá trị là 0.
Số lƣợng gói tin đƣợc truyền đi phụ thuộc vào từng phiên bản khác nhau của
chuẩn NMEA 0183. Cụ thể ví dụ với máy thu GPS GP31 của hãng FURUNO:
With Waypoint
AP REM
START
BIT STOP
BIT DATA BITS
D0 D1 D3 D2 D4 D5 D6 D7

18
Hình 2.2 : Dữ liệu ra của máy GPS-GP31 truyền theo chuẩn NMEA 0183
Từ hình trên ta có thể thấy 2 câu lệnh RMA, GTD từ thiết bị GPS truyền đến
REM ( Radar, echosounder,ect.) phụ thuộc phiên bản của chuẩn NMEA 0183. Với
NMEA 0183 V1.5 truyền thêm đƣợc câu RMA và NMEA 0183 V2.0 truyền đƣợc câu
GTD.
2.2.2 Định dạng câu lệnh của MNEA 0183
Tất cả các dữ liệu của chuẩn NMEA-0183 đƣợc truyền đi theo từng câu lệnh,
đầu câu bao giờ cũng bắt đầu bằng ký tự “ $” và các kí tự đều đƣợc mã hóa theo bảng
mã hóa tiêu chuẩn ASCII. Trong mỗi câu lệnh có dấu “ ,” để tách từng phần của câu.
Định dạng câu lệnh nhƣ sau:
$yyXXX,….., *xx <CR><LF>
Bắt đầu câu luôn là ký tự $
yy là nhận dạng của thiết bị Talker ( ví dụ nhƣ thiết bị GPS là GP..)
XXX là kiểu dữ liệu của câu ( ví dụ nhƣ GGA (Global Positioning
System Fix Data))
Sau dấu phẩy là nội dung dữ liệu của câu và có thể thay đổi phụ thuộc
vào kiểu dữ liệu đang đƣợc truyền.
Phần cuối cùng là 2 chữ số kiểm tra tổng ( checksum). Hai chữ số này là
2 số Hexa và đƣợc tính bằng tất cả các kí tự ở giữa kí tự “$” và dấu “*”.
Kết thúc 1 câu dữ liệu là các kí tự xuống dòng và về đầu dòng-CR
(Carriage Return) và LF (Line Feed)<CR><CL>
GGL
VTG
ZDA
AAM
APB
BOD
BWC
XTE
(1 sec
interval )
GGL
GGA
VTG
ZDA
RMA*
GTD*
RMC
RMB
BWC
(1sec
interval )
RMA : Ver 2.0 only
GTD : Ver 1.5 only

19
Một bức điện có thể chứa đựng tới 79 kí tự và thêm các kí tự đầu “$” và cuối
<CR><LF>. Nếu dữ liệu cho một trƣờng nào đó mà không có thì trƣờng đó đƣợc hủy
bỏ, nhƣng dấu phẩy “,” danh giới giữa các trƣờng thì vẫn đƣợc gửi đi nhƣng không có
khoảng trống giữa các dấu phẩy này.
Đối với các thiết bị Talker chuẩn NMEA quy định mã nhận dạng như sau:
AG Autopilot – General: Máy lái tự động đa năng.
AP Autopilot – Magnetic: Máy lái tự động theo từ trƣờng.
CD Communications – Digital Selective Calling (DSC): Gọi chọn số DSC
CR Communications – Receiver / Beacon Receiver: Đèn hiệu thu.
CS Communications – Satellite: Vệ tinh truyền thông.
CT Communications – Radio-Telephone (MF/HF): Điện thoại vô tuyến MF/HF.
CV Communications – Radio-Telephone (VHF): Điện thoại vô tuyến VHF.
CX Communications – Scanning Receiver: Máy thu quét truyền thông
DF Direction Finder: Kính ngắm định hƣớng.
EC Electronic Chart Display & Information System (ECDIS): Hệ thống thông tin và
biểu đồ điện tử.
EP Emergency Position Indicating Beacon (EPIRB): Phao định vị an toàn.
ER Engine Room Monitoring Systems: Các hệ thống kiểm tra buồng máy.
GP Global Positioning System (GPS): Hệ thống định vị toàn cầu GPS.
HC Heading – Magnetic Compass: Hƣớng mũi tàu theo la bàn từ.
HE Heading – North Seeking Gyro: Hƣớng mũi tàu theo con quay hƣớng bắc.
HN Heading – Non North Seeking Gyro: Hƣớng mũi tàu không theo con quay.
II Integrated Instrumentation: Trang thiết bị tích hợp.
IN Integrated Navigation: Định vị thông tin tích hợp.
LC Loran C: Hệ thống vô tuyến hàng đạo xa.
P Proprietary Code: Mã sở hữu riêng.
RA RADAR and/or ARPA:

20
SD Sounder, Depth: Máy đo độ sâu.
SN Electronic Positioning System, other/general: Hệ thống định vị điện tử.
SS Sounder, Scanning: Máy quét dò.
TI Turn Rate Indicator: Bộ chỉ báo tốc độ quay lái.
VD Velocity Sensor, Doppler, other/general: Bộ cảm biến tốc độ theo hiệu ứng
Doppler.
DM Velocity Sensor, Speed Log, Water, Magnetic: Bộ cảm biến tốc độ theo tốc độ
tàu, nƣớc, từ trƣờng.
VW Velocity Sensor, Speed Log, Water, Mechanical: Bộ cảm biến tốc độ theo tốc độ
tàu, nƣớc, động cơ.
WI Weather Instruments: Dụng cụ báo thời tiết.
YX Transducer: Bộ biến đổi.
ZA Timekeeper – Atomic Clock: Đồng hồ nguyên tử.
ZC Timekeeper – Chronometer: Đồng hồ bấm giờ.
ZQ Timekeeper – Quartz: Đồng hồ thạch anh.
ZV Timekeeper – Radio Update, WWV or WWVH: Đồng hồ đƣợc cập nhập bằng vô
tuyến, WWV hoặc WWVH.
Một số kiểu dữ liệu của câu lệnh NMEA 0183:
AAM -Waypoint Arriva lAlarm : Thông tin báo động
ALM - GPS Almanac Data : Dữ liệu GPS
APB - Autopilot Sentence "B" : Máy lái tự động
*ASD- Autopilot System Data : Dữ liệu từ hệ thông máy lái tự động
BEC - Bearing & Distance to Waypoint - Dead Reckoning : Góc phƣơng vị và khoảng
cách tới mục tiêu – Tính toán va chạm
BOD - Bearing - Origin to Destination : Góc phƣơng vị và vị trí xuất phát tới mục tiêu.
BWC - Bearing & Distance to Waypoint : Góc phƣơng vị và khoảng tới mục tiêu

21
BWR - Bearing & Distance to Waypoint - Rhumb Line : Góc phƣơng vị và khoảng
cách tới mục tiêu- Đƣờng đạo hàng.
DBT - Depth Below Transducer : Thông tin về độ sâu
DPT - Depth*DSC - Digital Selective Calling Information : Thông tin về cuộc gọi
chọn số.
DSI-DSCTransponder Initialize : thiết bị phát đáp radar
DSR-DSCTransponder Response : bộ đáp ứng tín hiệu phát đáp
GGA - Global Positioning System Fix Data : Dữ liệu định vị toàn cầu.
GLC - Geographic Position - Loran-C :
GLL - Geographic Position - Latitude/Longitude : vị trí kinh độ/ vĩ độ.
GNS -GNSS Fix Data
GRS - GNSS Range Residuals
GSA - GNSS DOP and Active Satellites
GST - GNSS Pseudorange Error Statistics
GSV - GNSS Satellites in View
GXA - TRANSIT Position
*HDG - Heading, Deviation & Variation
*HDT - Heading, True : Hƣớng thực
HSC - Heading Steering : Hƣớng máy lái.
LCD - Loran-C Signal Data
MSK - MSK Receiver Interface : thông tin cổng thu MSK
MSS - MSK Receiver Signal Temperature : thông tin về nhiệt độ bộ thu tín hiệu MSK
MWD - Wind Direction & Speed : Hƣớng và tốc độ gió.
*MWV - Wind Speed and Angle Numbers : Tốc độ gió và
*OSD - Own Ship Data : Dữ liệu tàu
RMA - Recommended Minimum Specific Loran-C Data

22
RMB - Recommended Minimum NavigationInformation
RMC - Recommended Minimum Specific GNSS Data
*ROT - Rate Of Turn
Một số dạng câu lệnh hay thường gặp.
GGA Global Positioning System Fix Data. Time, Position and fix related data
for a GPS receiver
$--GGA,hhmmss.ss,llll.ll,a,yyyyy.yy,a,x,xx,x.x,x.x,M, , , , , *hh
| | | | | | | | | | |
1 2 3 4 5 6 7 8 9 10 11
1) Time (UTC) : Thời gian
2) Latitude : Kinh độ
3) N or S (North or South) : N hoặc S
4) Longitude : Vĩ độ
5) E or W (East or West) : E hoặc W
6) GPS Quality Indicator, : Chất lƣợng máy thu GPS
0 - fix not available, : không ổn định
1 - GPS fix, : ổn định
2 - Differential GPS fix
7) Number of satellites in view, 00 – 12 : số vệ tinh gửi về
8) Horizontal Dilution of precision :
9) Antenna Altitude above/below mean-sea-level (geoid)
10) Units of antenna altitude, meters :
11) Checksum : kiểm tra tổng
GLL Geographic Position – Latitude/Longitude : vị trí kinh độ / vĩ độ
1 2 3 4 5 6 7
| | | | | | |
$--GLL,llll.ll,a,yyyyy.yy,a,hhmmss.ss,A*hh
1) Latitude : Kinh độ
2) N or S (North or South) : N hoặc S
3) Longitude : Vĩ độ
4) E or W (East or West) : E hoặc W
5) Time (UTC) : thời gian UTC
6) Status A - Data Valid, V - Data Invalid
7) Checksum : kiểm tra tổng

23
ZDA Time & Date – UTC, Day, Month, Year and Local Time Zone
1 2 3 4 5 6 7
| | | | | | |
$--ZDA,hhmmss.ss,xx,xx,xxxx,xx,xx*hh
1) Local zone minutes description, same sign as local hours : giờ, phút, giây khu vực
2) Local zone description, 00 to +/- 13 hours
3) Year : năm
4) Month, 01 to 12 : tháng
5) Day, 01 to 31: ngày
6) Time (UTC) : giờ UTC
7) Checksum : kiểm tra tổng
VTG Track Made Good and Ground Speed
1 2 3 4 5 6 7 8 9
| | | | | | | | |
$--VTG,x.x,T,x.x,M,x.x,N,x.x,K*hh
1) Track Degrees
2) T = True
3) Track Degrees
4) M = Magnetic
5) Speed Knots : tốc độ hải lý
6) N = Knots
7) Speed Kilometers Per Hour : tốc độ km/h
8) K = Kilometres Per Hour
2.2.2 Kết nối với các thiết bị
a) Giới thiệu
Chuẩn NMEA 0183 cho phép một thiết bị Talker và nhiều các thiết bị Listenes
đƣợc kết nối song song trên cùng 1 mạch điện. Đối với NMEA 0183 thì tín hiệu ra
truyền đƣợc trên cả hai chuẩn RS232 và RS 422. RS232 sẽ là 2 đƣờng dây một cho
Data và một nối Mass và RS 422 là hai đƣờng dây tín hiệu A và B có vỏ bọc bảo vệ.
Dòng tín hiệu A của thiết bị Talker sẽ đƣợc kết nối song song với dòng tín hiệu A của
thiết bị Listenes và dòng tín hiệu B cũng vậy. Vỏ bọc bảo vệ chỉ đƣợc tiếp đất ở thiết
bị Talker. Điện áp trên đƣờng dây tín hiệu A phù hợp với điện áp trên đƣờng dây tín
hiệu đơn của chuẩn TTL, còn điện áp trên đƣờng dây tín hiệu B thì ngƣợc lại. Có
nghĩa là mức logic sẽ thay đổi tín hiệu theo điện áp vi sai giữa 2 đƣờng đây dẫn, dây
nào có điện áp cao hơn là NMEA+, dây kia là NMEA -.

24
Hình 2.3 : Tín hiệu ra của thiết bị phát (Talker) theo chuẩn RS 232
Hình 2.4 : Tín hiệu ra của thiết bị phát ( Talker) theo chuẩn RS 422
Ngoài ra đối với NMEA 0183 V.3.0 hay NMEA 0183-HS thì tốc độ Baud cao
hơn các phiên bản trƣớc . Điều này cho phép các thiết bị ARPA và AIS mới có thể gửi
lƣợng thông tin lớn một cách kịp thời. Để làm đƣợc điều này NMEA 0183-HS ngoài 2
dây tín hiệu A và B còn có 1 dây tín hiệu C ( signal ground).

25
Hình 2.5: Các dây tín hiệu trong NMEA 0183-HS
b) Yêu cầu chung
Chuẩn NMEA 0183 cho phép một thiết bị phát (Talker) kết nối với nhiều thiết
bị thu (Listenes). Hình 2.6 mô tả một kết nối giữa thiết bị phát (Talker) và các thiết bị
thu (Listenes).
GPS
(talker)
Splitter
(listener) Automatic Identification
System (AIS)
(listener)
RADAR
Listener Listener

26
Hình 2.6 Kết nối giữa thiết bị phát (Talker) với các thiết bị thu ( Listenes)
Đối với chuẩn NMEA 0183-HSdo có thêm đƣờng dây tín hiệu “ C” nên việc kết
nối giữa các thiết bị sẽ đƣợc thực hiện nhƣ sau:
Hình 2.7 : Kết nối các thiết bị phát/thu ( Talker/Listenes) theo chuẩn
NMEA 0183-HS
Trƣờng hợp thiết bị Listenes nhận nhiều tín hiệu từ các thiết bị Talker khác
nhau sẽ có một bộ dồn kênh Multiplexers để kết hợp các tín hiệu này và cung cấp một
dòng dữ liệu ra duy nhất tới thiết bị Listenes.
GPS
(talker)
(listener) (talker) Automatic Identification
System (AIS)
)
(listener)
RADAR
(talker)
(talker) (listener)
(listener)
Multiplexer

27
Hình 2.8: Kết nối nhiều tín hiệu từ các thiết bị phát (Talker) tới một thiết bị
thu (Listenes)
c) Kết nối với các thiết bị vi sai theo chuẩn NMEA 0183
Thiết bị vi sai này tuân theo một cách đầy đủ của chuẩn NMEA0183 phiên bản
2.0 đầu vào NMEA/A+ thì đƣợc nối với đầu ra A/ NMEA của thiết bị một đầu ra, còn
đầu vào NMEA/B- thì đƣợc kết nối với B/NMEA của thiết bị một đầu ra đƣợc chỉ ra ở
hình vẽ sau:
Hình 2.9 Kết nối giữa các thiết bị vi sai
Đối với các thiết bị Listenes mà chỉ có một tín hiệu vào duy nhất thì việc kết
nối sẽ đƣợc thực hiện nhƣ sau.Đầu vào NMEA/A+ thì đƣợc nối với đầu ra A/ NMEA
của thiết bị một đầu ra, còn đầu vào NMEA/B- thì đƣợc kết nối với Ground của thiết
bị.
Hình 2.10 Kết nối với thiết bị phát ( Listenes) chỉ có một tín hiệu vào.
d) Kết nối với thiết bị Talker chỉ có một đường tín hiệu ra.
Khi kết nối với thiết bị Talker chỉ có một đƣờng tín hiệu ra lúc này tín hiệu
NMEA+/A của thiết bị Listenes sẽ đƣợc nối với NMEA Tx và NMEA-/B sẽ đƣợc nối
với Ground.

28
Hình 2.11: thiết bị thu (Talker) chỉ có 1 đường tín hiệu
Trong trƣờng hợp cả 2 thiết bị chỉ có một đƣờng tín hiệu duy nhất thì việc kết
nối 2 thiết bị lúc này sẽ là:
Hình 2.12: Cả 2 thiết bị chỉ có 1 đường tín hiệu.
e) Kết nối với máy tính PC
Việc kết nối với máy tính nhằm kiểm tra dữ liệu NMEA 0183 và thu thập thông
tin về dữ liệu.
Khi PC là 1 thiết bị Listen.
Khi đó máy tính cá nhân nhận dữ liệu từ thiết bị Talker theo chuẩn NMEA
thông qua cổng RS232 của máy tính cá nhân. Việc kết nối đƣợc thể hiện qua hình vẽ
sau :
Hình 2.13: Kết nối với máy tính

29
Khi PC là thiết bị Talker
Lúc này để truyền thông tin cho 1 thiết bị Listener thông qua cổng RS 232 thì
cũng tƣơng tự nhƣ hình trên nhƣng lúc này đƣờng dây tín hiệu A sẽ đƣợc kết nối với
chân số 2 ( Tx).
2.3 CÁC GIAO DIỆN VẬT LÝ
2.3.1 Chuẩn truyền dẫn dữ liệu RS-232.
Chuẩn RS-232 phục vụ chủ yếu trong việc ghép nối điểm - điểm giữa 2 thiết bị
đầu cuối DTE hoặc gữa một thiết bị đấu cuối với một thiết bị truyền dữ liệu DCE.
Đặc tính điện học: RS-232 sử dụng phƣơng thức truyền không đối xứng, tức là sử
dụng tín hiệu điện áp chênh lệch giữa một dây dẫn và đất. Mức điện áp đƣợc sử dụng
dao động trong khoảng từ -15V tới +15V. Khoảng từ 3V đến 15V ứng với giá trị logic
0, khoảng từ -3V đến -15V ứng với giá trị logíc 1. Chính vì từ -3V tới +3V là phạm vi
không đƣợc định nghĩa, trong trƣờng hợp thay đổi giá trị logic giữa 1 và 0 một tín hiệu
phải vƣợt qua khoảng quá độ đó với độ dốc 6V/ms.
Hình 2.14: Đặc tính điện học của chuẩn RS-232.
Tốc độ truyền dẫn tối đa phụ thuộc vào chiều dài dây dẫn. Đa số các hệ thống
hiện nay chỉ hỗ trợ tới tốc độ 19.2 kBd (chiều dài cho phép 30-50m). Một ƣu điểm của
chuẩn RS-232 là có thể sử dụng công suất phát tƣơng đối thấp, nhờ trở kháng đầu vào
hạn chế từ 3-7 k . Các thông số điện học quan trọng của RS-232 đƣợc mô tả trong
bảng sau:
+25V
+15V
Logic 0 Phạm
vi
làm
việc
cho
phép Logic 1
Khu
vực
quá
độ
+3V
-15V
-3V

30
Bảng 2.1 Các thông số của RS 232
Thông số Điều kiện Tối thiểu Tối đa
Điện áp đầu ra hở mạch 25V
Điện áp đầu ra khi có tải 3 7L
k kR 5V 15V
Trở kháng đầu ra khi cắt nguồn 0
2 2V VV 300
Dòng ra ngắn mạch 500mA
Điện dung tải 2500pF
Trở kháng đầu vào OCV 3k 7k
Ngƣỡng cho giá trị logic 0 3V
Ngƣỡng cho giá trị logic 1 -3V
Giao diện cơ học: Chuẩn EIA/TIA-232F qui định 3 loại giắc cắm RS-232 là DB-
9 (9 chân), DB-25 (25 chân) và ALT-A (26 chân). Trong đó loại DB-9 đƣợc sử dụng
trong quá trình kết nối giữa máy tính và các thiết bị hàng hải. Sơ đồ chân nhƣ sau:
Hình 2.15: Giao diện cơ học của RS-232.
1
2
3
4
5
6
7
8
9
1 DCD - Data Carrier Detect
2 RxD - Receive Data
3 TxD - Transmit Data
4 DTR - Data Terminal Ready
5 GND – Signal ground
6 DSR - Data Set Ready
7 RTS - Request To Send
8 CTS - Clear To Send
9 RI - Ring Indicator
GND - Ground

31
Chế độ làm việc: Chế độ làm việc của RS-232 là 2 chiều toàn phần (full-duplex),
tức là 2 thiết bị tham gia cùng có thể thu và phát tín hiệu cùng một lúc. Nhƣ vậy việc
thực hiện truyền thông cần tối thiểu 3 dây dẫn, trong đó 2 dây tín hiệu nối chéo các
đầu thu phát của 2 trạm và một dây đất.
2.3.2 Chuẩn truyền dẫn dữ liệu RS-422
Đặc tính điện học: Khác với RS-232 thì RS-422 sử dụng tín hiệu điện áp chênh
lệch đối xứng giữa 2 dây dẫn A và B, nhờ vậy giảm đƣợc nhiễu và cho phép tăng
chiều dài dây dẫn. Chuẩn RS-422 thích hợp cho phạm vi truyền dẫn tới 1200m mà
không cần bộ lặp. Điện áp chênh lệch dƣơng ứng với trạng thái logic 0 và âm ứng với
trạng thái logic 1. Các thông số cơ bản của RS-422 nhƣ sau:
Bảng 2.2 : Các thông số của RS 422
Thông số Điều kiện Tối thiểu Tối đa
Điện áp đầu ra hở mạch 10V
Điện áp đầu ra khi có tải 100TR 2V
Trở kháng đầu ra 100
Dòng ra ngắn mạch 150mA
Thời gian quá độ đầu ra 100TR *10% BT
Điện áp chế độ chung đầu ra OCV 100
TR 3V
Độ nhạy cảm đầu vào 7 7CM
V VV 200mA
Điện áp chế độ chung đầu ra CMV -7V 7V
Trở kháng đầu vào 4k
Trong cấu hình ghép nối tối thiểu cho RS-422 cần một đôi dây dùng truyền dẫn
tín hiệu, khi đó chỉ có thể dùng phƣơng pháp truyền một chiều (simplex) hoặc 2 chiều
gián đoạn (half-duplex) tức là trong một thời điểm chỉ có một tín hiệu duy nhất đƣợc
truyền đi. Để thực hiện truyền 2 chiều toàn phần (full-duplex) ta cần 2 đôi dây. RS-422
có khả năng nối ghép điểm-điểm, hoặc điểm-nhiều điểm trong một mạng đơn giản.
Thực tế, RS-422 thƣờng chỉ dùng để ghép nối điểm-điểm với mục đích thay thế RS-
232 cho khoảng cách truyền thông lớn và tốc độ cao.

32
2.4 MÔ PHỎNG DỮ LIỆU NMEA 0183
2.4.1 Mô phỏng việc trao đổi dữ liệu bằng Phần mềm Hyper Terminal và
phần mềm GpcSim trên Windown 7
a) Giới thiệu phần mềm Hyper Terminal
Hình 2.16 Giao diện phần mềm Hyper Terminal
Phần mềm này cho ta thiết lập các thông số để phù hợp với chuẩn NMEA 0183
nhƣ : Tốc độ, khung dữ liệu bít, parity, stopbit.
b) Phần mềm GPCSIM
Phần mềm này sẽ mô phỏng dữ liệu ra của tín hiệu Talker. Giao diện của phần
mềm có dạng nhƣ sau :
Các phần chính của phần mềm gồm có:
Ship data : bao gồm các thông tin về kinh độ (longitude), vĩ độ
(Latiude), hƣớng mũi tàu (Heading), thời gian thực (time UTC)
COM port : Gồm cổng ra và tốc độ bits ( 4800,9600,19200,
38400,57600)
Generated string : Bao gồm các thông tin về dạng mã lệnh của thiết bị
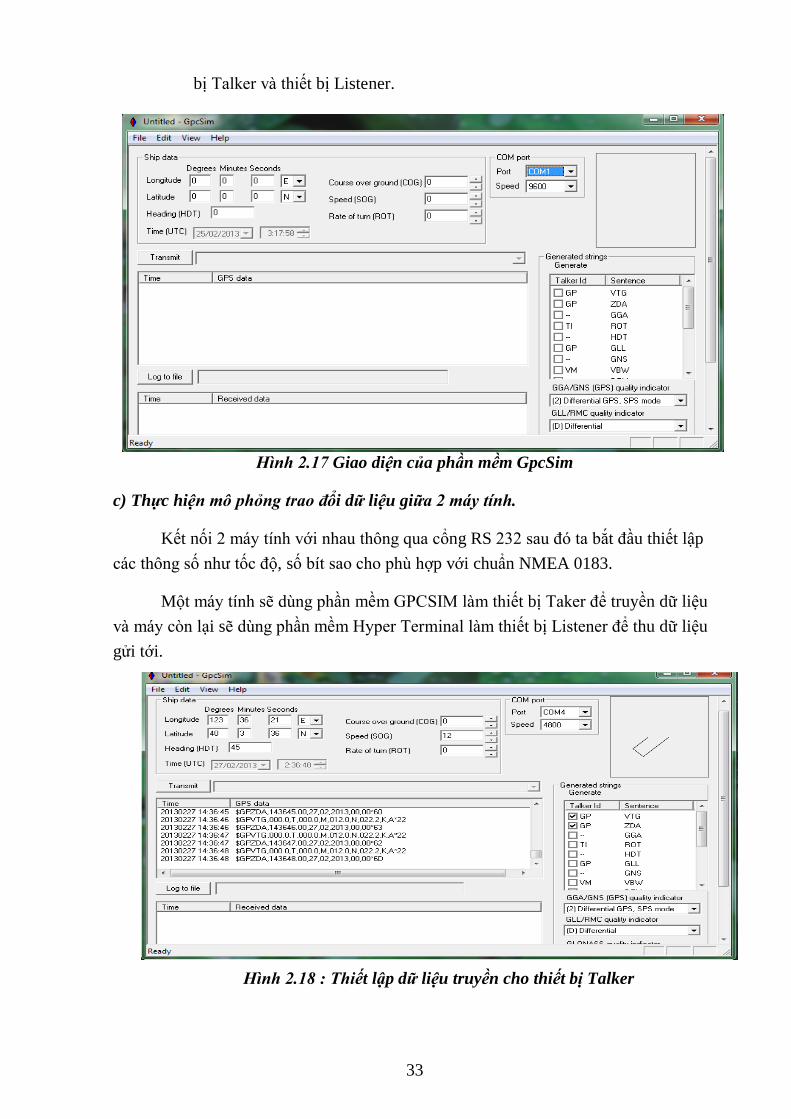
33
bị Talker và thiết bị Listener.
Hình 2.17 Giao diện của phần mềm GpcSim
c) Thực hiện mô phỏng trao đổi dữ liệu giữa 2 máy tính.
Kết nối 2 máy tính với nhau thông qua cổng RS 232 sau đó ta bắt đầu thiết lập
các thông số nhƣ tốc độ, số bít sao cho phù hợp với chuẩn NMEA 0183.
Một máy tính sẽ dùng phần mềm GPCSIM làm thiết bị Taker để truyền dữ liệu
và máy còn lại sẽ dùng phần mềm Hyper Terminal làm thiết bị Listener để thu dữ liệu
gửi tới.
Hình 2.18 : Thiết lập dữ liệu truyền cho thiết bị Talker

34
Ở đây ta sẽ truyền đi 2 câu lệnh là VTG và ZDA đến thiết bị Listener. Phần
mềm Hyper Terminal sẽ thu đƣợc 2 câu lệnh này.
Hình 2.19 : Dữ liệu thu được

35
CHƯƠNG 3
XU HƯỚNG PHÁT TRIỂN CHUẨN GHÉP NỐI MỚI
HIỆN NAY
3.1 GIỚI THIỆU CHUNG
Cùng với sự phát triển, các thiết bị nghi khí hàng hải và vô tuyến điện hiện đại
yêu cầu dữ liệu từ rất nhiều nguồn khác nhau. Nếu không có một mạng lƣới tiêu chuẩn
để cung cấp việc tích hợp dữ liệu, thì nhà thiết kế thiết bị phải cung cấp rất nhiều dữ liệu
đầu vào, có liên quan đến chi phí và việc bổ sung dây, hoặc các thiết bị sử dụng hợp
nhất dữ liệu trên một kênh duy nhất. Ở một mức độ cơ bản, và với việc sử dụng rộng rãi
nhƣ ngày nay, thì chuẩn NMEA 0183 (IEC 61162-1) đã cung cấp việc phân phối dữ liệu
nối tiếp từ một máy phát tới rất nhiều máy thu. Hoạt động với tốc độ 4800 bít/giây, và
giao thức này có khả năng phân phối xấp xỉ 10 bức điện hoặc câu lệnh trên giây. Nó đã
chứng minh đƣợc khả năng tƣơng thích tự động khi một thiết bị đơn phát dữ liệu sử
dụng cho các thiết bị khác. Nhƣng nó cũng đã nhanh chóng gặp phải giới hạn khi các
hệ thống có sự tổng hợp dữ liệu. Tuy nhiên, việc sử dụng chuẩn này vẫn tiếp tục đƣợc
sử dụng cho những ứng dụng đơn giản, lƣu trữ dữ liệu và việc kết nối trực tiếp giữa 2
thiết bị là cần thiết.
Với từng hệ thống riêng lẻ trên tàu, chẳng hạn nhƣ máy móc động cơ hoặc hệ
thống định vị, thực hiện chức năng tƣơng đối chuyên dụng, thƣờng có thời gian thực
hiện các yêu cầu đo bằng mili giây, và cần ít hơn các nút kết nối. Các hệ thống này có
xu hƣớng nhỏ hơn và khép kín khi so sánh với các mạng lƣới tàu khác, và thực hiện
khối lƣợng dữ liệu ít hơn. Bởi vì ứng dụng này tích hợp mạng cảm biến thông thƣờng và
thiết bị truyền động vào các hệ thống lớn hơn, chi phí cho mỗi nút phải đƣợc ít hơn
trong các ứng dụng trên tàu khác. Để đáp ứng đƣợc những yêu cầu trên hiệp hội điện tử
hàng hải quốc gia – NMEA đã phát triển giao tiếp nối tiếp NMEA 0183 thành mạng
NMEA 2000® (IEC 61162-3).
Chuẩn NMEA 2000 ra đời năm 1994 với sự hợp tác từ trên 40 tổ chức và các
công ty hàng hải khác nhau. Độ rộng băng thông phù hợp cho xu hƣớng phát triển ngày
nay cũng nhƣ trong tƣơng lai. NMEA 2000 là một chuẩn mạng mới cho mạng truyền
thông trên tàu thủy. Nó cho phép các thiết bị trên tàu kết nối và chia sẻ dữ liệu nhất
quán, thuận tiện cho việc trao đổi thông tin trạng thái cũng nhƣ các thông tin giám sát
điều khiển mang tính thời gian thực nhƣ:
- Các thông tin về vị trí, tốc độ tàu, độ sâu, hƣớng mũi tàu v.v...
- Các thông tin chỉ báo và điều khiển cho hệ thống lái tự động.
- Điều khiển và giám sát máy chính.
- Hệ thống giám sát điều khiển máy đèn, quản lý năng lƣợng điện v.v...

36
- Hệ thống thu thập dữ liệu và giám sát toàn tàu.
Là một chuẩn mạng nên các diện vật lý cũng nhƣ giao thức truy nhập mạng, giao
thức truyền dữ liệu đƣợc quy định rõ ràng. Để đạt đƣợc mục tiêu trên hiệp hội điện tử
hàng hải quốc tế NMEA đã lựa chon mạng CAN (Controller Area Network) làm cơ sở
cho chuẩn NMEA 2000. Việc lựa chọn mạng CAN làm cơ sở là vì mạng CAN có những
ƣu điểm sau:
- CAN là một chuẩn truyền dữ liệu nối tiếp có tính bảo toàn dữ liệu cao, đáp
ứng đƣợc những ứng dụng đòi hỏi tính thời gian thực.
- Tốc độ truyền dữ liệu lớn, có thể lên tới hàng Megabits trên một giây.
- Là một mạng thông minh trong việc truy nhập mạng và sửa lỗi.
Và việc kết hợp và phát triển mạng CAN và chuẩn truyền dữ liệu nối tiếp NMEA
0183 đã cho ra đời chuẩn mạng truyền thông mới NMEA 2000 với những đặc điểm nổi
trội.
Hình 3.1 Mạng NMEA 2000

37
Hình 3.2: Mạng NMEA 2000 thực tế trên tàu
3.2 CẤU TRÚC MẠNG NMEA 2000
3.2.1 Các thành phần của mạng NMEA 2000
Thành phần của mạng NMEA 2000 bao gồm:
- Lớp vật lý.
- Lớp liên kết dữ liệu.
- Lớp mạng.
- Lớp quản lý mạng.
- Lớp ứng dụng
Lớp vật lý định nghĩa phần cơ và phần điện bên ngoài của liên kết vật lý giữa các
kết nối mạng, tham chiếu đặc điểm của các thiết bị mạng CAN và các giao diện mạng
để sử dụng trong mạng NMEA 2000.
a) Tầng liên kết dữ liệu
Tầng liên kết dữ liệu của mạng NMEA 2000 đƣợc định nghĩa trong tiêu chuẩn
quốc tế ISO 11783-3. Các định nghĩa này là giống với định nghĩa tầng liên kết dữ liệu
SAE trong tiêu chuẩn SAE J19939-21, hay nói cách khác tiêu chuẩn ISO 11783-3 ngoài
những định nghĩa có trong tiêu chuẩn SAE J1939-21 thì còn có thêm một số chức năng
nâng cao hơn. Những chức năng nâng cao này hỗ trợ tốt cho các loại dữ liệu và định
dạng dữ liệu, các thiết bị nghi khí hàng hải trong việc cài đặt và hoạt động trên tàu .
Cũng giống nhƣ lớp vật lý, một số yêu cầu của tầng liên kết dữ liệu lấy chuẩn CAN làm

38
nền tảng cho việc truy nhập, truyền dẫn dữ liệu.
Tầng liên kết dữ liệu vó chức năng sau:
+ Tạo ra dòng bit nối tiếp để truyền trên mạng.
+ Truy cập vào mạng khi thiết bị có dữ liệu để gửi. Thiết bị sẽ tiến hành kiểm tra
xem mạng có bận hay không, nếu mạng rảnh, nó sẽ đƣợc phép gửi dữ liệu lên trên
mạng. Cũng nhƣ CAN, khi có xung đột xảy ra – có ít nhất hai thiết bị cùng gửi dữ liệu
lên trên mạng NMEA 2000 sẽ tiến hành so sánh dữ liệu mà hai thiết bị gửi lên, cơ chế
so sánh là bit với bit. Thiết bị nào có dữ liệu có mức trội – Dominant sẽ đƣợc ƣu tiên và
tiếp tục truyền dữ liệu. Thiết bị còn lại sẽ phải chờ tới khi nào mạng rảnh mới tiếp tục
đƣợc gửi dữ liệu lên mạng.
+ Tấng liên kết dữ liệu còn làm nhiệm vụ kiểm tra và phát hiện lỗi, với những
tin nhắn lỗi, mạng sẽ yêu cầu thiết bị gửi lại tin nhắn. Nhƣ CAN, NMEA 2000 cũng tự
động xác định nút bị lỗi, trong trƣờng hợp nút dó khi phát tin liên tục bị lỗi, để bảo vệ
các phần còn lại của mạng, thiết bị lỗi đó sẽ bị tạm dừng- off line.
Lấy CAN làm cơ sở, khung dữ liệu nối tiếp sử dụng 29 bit trong trƣờng nhận
dạng, tối đa 8 byte dữ liệu. Khung dữ liệu có sử dụng bit bắt đầu, bit kết thúc, bit ƣu
tiên, bit điều khiển, các bit phát hiện lỗi CRC và bit xác báo. NMEA 2000 sử dụng tiêu
chuẩn J1939/ISO 11783 để định nghĩa trƣờng nhận dạng. Trƣờng nhận dạng sẽ đƣợc
phát đi đầu tiên khi một thiết bị tiến hành gửi dữ liệu lên mạng. Khi có xung đột xảy ra
tầng liên kết dữ liệu sẽ so sánh với cơ chế bit với bít các bit trong trƣờng nhận dạng của
2 dữ liệu đƣợc phát đi từ hai thiết bị. Thiết bị nào có mức ƣu tiên cao hơn sẽ đƣợc cấp
quyền truyền dữ liệu lên mạng, các thiết bị khác sẽ phải chờ tới lƣợt.
b) Tầng quản lý mạng
Tầng quán lý mạng của mạng NMEA 2000 có các thủ tục phù hợp với tiêu chuẩn
quốc tế ISO 11783-5 và dự trên cơ sở là tiêu chuẩn SAE J1939-81. trong đó tầng quản
lý mạng có nhiệm vụ:
+ Quản lý và phân công các địa chỉ trên mạng.
+ Quản lý các thiết bị đƣợc kết nối vào mạng.
+ Quản lý nguồn điện cung cấp cho mạng.
Mỗi thiết bị đƣợc kết nối vào mạng phải có địa chỉ. Có 255 địa chỉ có sẵn trong
một byte tại trƣờng địa chỉ. Trong đó từ địa chỉ 252 tới 255 là để dự trữ. Về việc quy
đinh địa chỉ và khả năng tƣơng thích của các thiết bị trong chuẩn mạng NMEA 2000
đƣợc chỉ ra ở tiêu chuẩn ISO 11783-5.
Khi có một thiết bị đƣợc lắp đặt vào mạng, tầng quản lý mạng sẽ cấp phát cho
thiết bị mới một địa chỉ, địa chỉ cấp phát này đƣợc thiết bị yêu cầu. Trong trƣờng hợp
địa chỉ yêu cầu cấp phát đã tồn tại do một thiết bị cũ hiện đang sử dụng, tầng quản lý
mạng sẽ cấp phát cho thiết bị mới một địa chỉ khác. Mà vẫn đảm bảo tính duy nhất của

39
địa chỉ đó. Một trƣờng hợp nữa là nếu có nhiều hơn một thiết bị yêu cầu cùng một địa
chỉ thì tầng quản lý mạng sẽ dựa trên tên của thiết bị-NAME để cấp phát địa chỉ. Thiết
bị đƣợc ƣu tiên cấp phát địa chỉ là thiết bị có tên ƣu tiên. Mỗi một thiết bị đƣợc sản xuất
đƣợc nhà máy cấp phát một NAME riêng bao gồm nhiều thông tin nhƣ: mã sản phẩm,
mã nhà sản xuất, mã lớp v.v.. mã số này là duy nhất đối với một thiết bị. Các thiết bị sẽ
nhận đƣợc địa chỉ và tiến hành truyền thông tin lên mạng sau 250ms nếu không có tranh
chấp về địa chỉ. Khi có tranh chấp xảy ra thiết bị có tên ƣu tiên sẽ đƣợc cấp phát địa chỉ,
thiết bị có tên thấp hơn sẽ tiến hành xin cấp phát địa chỉ khác. Quá trình bắt đầu lại từ
đầu.
c) Tầng ứng dụng
Tầng ứng dụng định nghĩa các gói tin đƣợc chấp nhận; cả quản lý mạng và dữ
liệu đƣợc truyền đi trên mạng.
Gói tin truyền đi trên mạng đƣợc sắp xếp, tổ chức thành một nhóm tham số và
đƣợc xác định bởi nhóm tham số PGN (Parameter Group Number), PGN có trong
trƣờng nhận dạng , nó có thể sử dụng 8 bit hoặc 16 bit tùy thuộc vào việc nhóm thông số
đƣợc thiết kế nhƣ tin quảng bá hay một địa chỉ. Tùy thuộc vào số lƣợng dữ liệu, nhóm
tham số PGN có thể sử dụng một hoặc nhiều khung CAN để truyền dữ liệu.
Cơ chế giao tiếp giữa các thiết bị kết nối với trục mạng chính – backbone NMEA
2000 là nhóm tham số. Một nhóm tham số là một bản ghi dữ liệu cụ thể, có chứa một
hay nhiều trƣờng dữu liệu, hoặc các thông số liên quan tới các thiết bị phát trên tàu.
Tham số nhóm có chu kỳ và đại diện cho các giá trị tham số hiện hành. Tiếp nhận nhiều
lần lặp lại của cùng một nhóm tham số từ một thiết bị thƣơng biểu thị một chuỗi giá trị
thời gian của các giá trin dữ liệu và có thể đƣợc sử dụng cho mục đích hiển thị hoặc
kiểm soát.
Nhóm tham số đƣợc định nghĩa bao gồm các thông tin sau:
+ Số lƣợng khung – nhóm tham số có thể đƣợc chứa trong không chỉ một khung
dữ liệu 8 byte mà còn có thể đƣợc chia thành nhiều khung. Nếu sử dụng nhiều khung
nhóm tham số có thể đƣợc gửi đi bằng giao thức gói tin nhanh theo mặc định.
+ Ƣu tiên – nhóm tham số có ƣu tiên cao hơn sẽ đƣợc ƣu tiên không phụ thuộc là
PGN nào hay địa chỉ nguồn.
+ Đánh giá định kỳ - nếu các nhóm tham số đƣợc gửi định kỳ thì mặc định là các
tham số nhóm sẽ phải chờ lần lƣợt.
+ Địa chỉ đến – các nhóm tham số có thể đƣợc gửi đến một đia chỉ cụ thể hoặc
có thể gửi cho tất cả các thiết bị.
+ Trƣờng định nghĩa – Mỗi trƣờng trong một nhóm tham số đƣợc xác định bởi
tên và định dạng dữ liệu.
Bảng dƣới đây giới thiệu một số PGN cơ bản và mô tả của nó:

40
Bảng 3.1 : Một số PGN cơ bản
PGN Mô tả
126208 Xác nhận nhóm chức năng
126992 Thời gian hệ thống
126996 Thông tin về thiết bị
126998 Thông tin về cấu hình
127250 Thông tin vè nhóm tàu
127257 Thông tin về trạng thái
129025 Thông tin về vị trí cập nhập nhanh
129033 Thông tin về ngày giờ
3.2.2 Cấu trúc mạng
Cấu trúc tổng quát của mạng NMEA 2000 là kiểu sử dụng 1 cáp trục chính và
các cáp thả “Drop” đấu nối các thiết bị tới trục mạng chính thông qua các đầu đấu nối
hình chữ T “Taps” hoặc các cổng kết nối nhiều đầu vào “Barrier”. Cáp trục chính không
phân nhánh, không vòng, là thẳng tuyến tính, đầu đầu và đầu cuối của cáp trục đƣợc kết
thúc bằng điện trở. Việc sử dụng điện trở kết thúc có tác dụng giảm phản xạ tín hiệu,
giảm sự xáo trộn khi một thiết bị đƣợc thêm vào hay ngắt ra khỏi mạng mà không cần
khởi động lại mạng.
Hình 3.3: Cấu trúc mạng NMEA 2000.
Mỗi mạng NMEA 2000 đƣợc tạo bằng việc kết nối các thiết bị theo chuẩn
NMEA 2000 với nhau, sử dụng giắc cắm plug-and-play. Kênh thông tin chính của một
NMEA 2000
Device
NMEA 2000
Device
Terminating
Resistor
Drop Cable
Max Length 6 Meters
200 Meter
(max backbone length)
Terminating
Resistor
+ VDC
Ground
Shield Network Power
Supply Connection
Backbone Cable
Over current protection as required

41
mạng NMEA 2000 là trục chính mạng–backbone, mà những thiết bị theo chuẩn NMEA
2000 nối vào. Mỗi thiết bị theo chuẩn NMEA 2000 nối vào mạng đều thông qua một
giắc cắm hình T – Tconnector. Trục chính này phải đƣợc nối với nguồn điện áp 12VDC
và hai đầu phải đƣợc kết thúc bằng hai điện trở cuối. Mô hình cấu trúc mạng
NMEA2000 đƣợc chỉ ra ở hình 3.4:
Khi thiết kế một mạng NMEA 2000, đầu tiên tạo sơ đồ mạng bao gồm những
thông tin chủ yếu sau:
+ Những thiết bị dự tính kết nối vào mạng.
+ Vị trí tƣơng đối của trục mạng với thiết bị trên tàu.
+ Độ dài tƣơng đối giữa các thiết bị và trục mạng chính, cũng nhƣ độ dài tổng thể
của trục chính này.
+ Cuối cùng là sự tiêu thụ nguồn của từng thiết bị.
Riêng cần chú ý tới hai thông tin cuối:
Về độ dài của trục cáp chính, độ dài của trục cáp chính phải đảm bảo không vƣợt
quá 200m. Đƣờng cáp dẫn tín hiệu từ các thiết bị tới cáp trục chính không vƣợt quá 6m
chiều dài.Việc quy định về chiều dài tối da của cáp trục chính cũng nhƣ cáp nhánh nhằm
đảm bảo tốc độ dữ liệu trên mạng là đồng nhất tại bất kì một vị trí nào trên mạng. Tốc
độ của mạng NMEA 2000 theo tiêu chuẩn là 250 kbits/s. Việc sử dụng một cáp duy nhất
này có thể thay thế cho 50 đƣờng cáp khi sử dụng chuẩn NMEA 0183, và có thể truyền
dữ liệu gấp 50 lần so với chuẩn NMEA 0183.
Hình 3.4 :Cấu trúc mạng NMEA 2000

42
Một đặc điểm khác biệt giữa mạng NMEA 2000 với các mạng khác nằm ở chỗ,
mạng NMEA 2000 cần có nguồn điện áp cung cấp riêng. Mạng NMEA 2000 sử dụng
nguồn điện áp 12VDC. Việc sử dụng nguồn điện áp này để nuôi đƣờng cáp trục chính –
backbone làm cho mạng NMEA 2000 có thể dễ dàng kết nối một cách dễ dàng với các
thiết bị có trở kháng cao, các thiết bị ở xa, các thiết bị có điện áp tín hiệu thấp. Bên cạnh
đó, việc sử dụng nguồn điện áp này sẽ dẫn tới việc điện áp một chiều sẽ quay ngƣợc trở
lại các thiết bị đƣợc kết nối trên mạng, giải pháp đƣa ra là tại các đầu vào của các thiết
bị ta sử dụng mạch cách ly quang. Mạch cách ly quang tạo ra trở kháng cao giữa các
thiết bị kết nối với mạng cũng nhƣ với các giao diện khác với nhau. Các giao diện trung
gian giữa các thiết bị và mạng thì làm việc ở dải điện áp từ 6VDC đến 9VDC. Nguồn
điện áp cung cấp cho mạng có thể đƣợc đấu nối tại bất kì một vị trí nào trên đƣờng trục
mạng chính, nhƣng mỗi mạng NMEA 2000 chỉ sử dụng một nguồn nuôi duy nhất và các
phƣơng án dự phòng.
Về việc tiêu thụ nguồn của các thiết bị khi kết nối với mạng cũng đƣợc quy định
rõ ràng nhƣ sau. Để thuận tiện cho việc ghép nối các thiết bị tiêu tốn điện năng vào
mạng, tiêu chuẩn NMEA 2000 có quy định: giá trị tƣơng đƣơng với 50mA là 1 LEN,
nhƣ vậy một thiết bị tiêu thụ 100mA sẽ tƣơng đƣơng với việc tiêu tốn 2 LEN, và một
thiết bị tiêu tốn 101mA sẽ tƣơng dƣơng với việc tiêu tốn 3 LEN. Công suất tối đa mà
một thiết bị có thể lấy từ trục cáp chính – backbone là 1.0mA tƣơng đƣơng với 20 LEN.
Các thiết bị tiêu tốn lớn hơn 20 LEN thì phải đƣợc cung cấp nguồn từ một nguồn nuôi
bên ngoài.
3.3 GIAO DIỆN VẬT LÝ
Cáp sử dụng trong mạng NMEA 2000 đƣợc quy định rõ ràng về màu sắc để tiện cho
việc đấu nối. Dƣới đây là bảng mã màu cáp mạng và chức năng của từng dây:
Bảng 3.2 :Mã màu cáp mạng và chức năng của từng dây
Màu sắc Tên Chức năng
Trắng NET-H Dây tín hiệu
Xanh NET-L Dây tín hiệu
Dây trần SHIELD Chống nhiễu (khử từ)
không đƣợc đấu nối
Đen NET-C Nối đất
Đỏ NET-S Nối vào nguồn
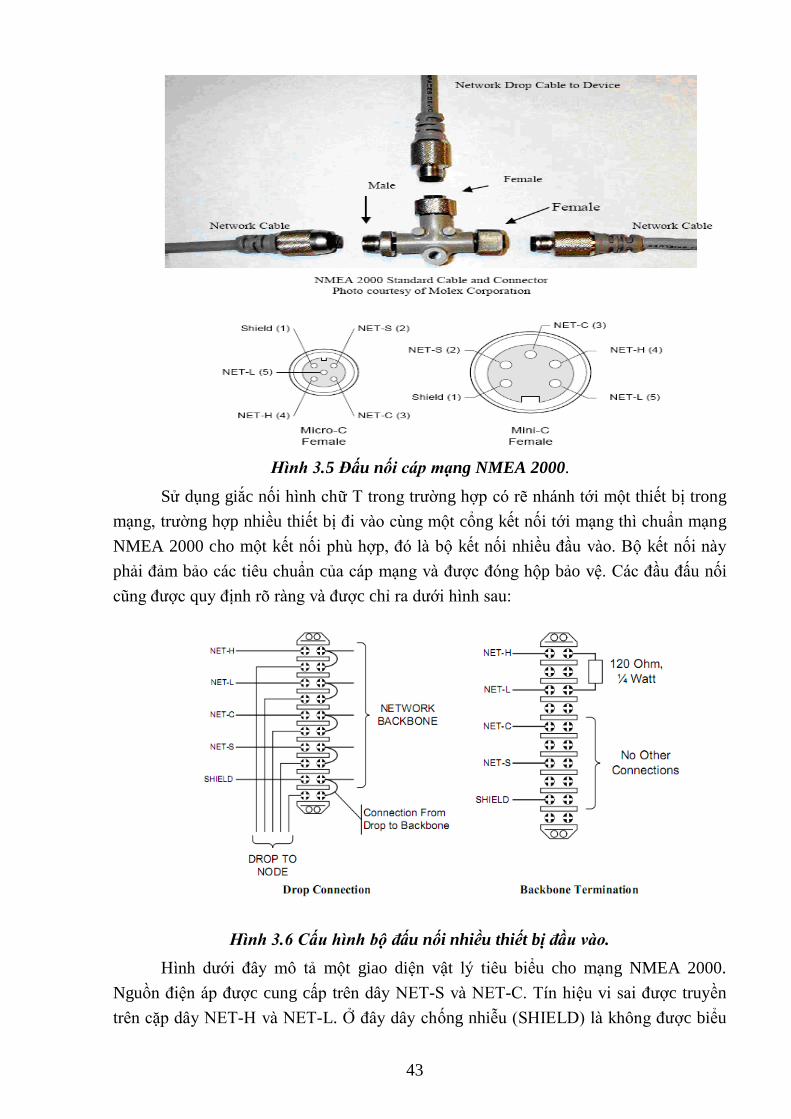
Chuẩn NMEA 2000 cũng quy định rõ về việc đấu nối cáp và các giắc cắm nhƣ sau:
43
Hình 3.5 Đấu nối cáp mạng NMEA 2000.
Sử dụng giắc nối hình chữ T trong trƣờng hợp có rẽ nhánh tới một thiết bị trong
mạng, trƣờng hợp nhiều thiết bị đi vào cùng một cổng kết nối tới mạng thì chuẩn mạng
NMEA 2000 cho một kết nối phù hợp, đó là bộ kết nối nhiều đầu vào. Bộ kết nối này
phải đảm bảo các tiêu chuẩn của cáp mạng và đƣợc đóng hộp bảo vệ. Các đầu đấu nối
cũng đƣợc quy định rõ ràng và đƣợc chỉ ra dƣới hình sau:
Hình 3.6 Cấu hình bộ đấu nối nhiều thiết bị đầu vào.
Hình dƣới đây mô tả một giao diện vật lý tiêu biểu cho mạng NMEA 2000.
Nguồn điện áp đƣợc cung cấp trên dây NET-S và NET-C. Tín hiệu vi sai đƣợc truyền
trên cặp dây NET-H và NET-L. Ở đây dây chống nhiễu (SHIELD) là không đƣợc biểu

44
diễn. Ở hai đầu đầu và đầu cuối cặp dây truyền tín hiệu đƣợc kết thúc bằng hai điện trở.
Sử dụng cách lý quang giữa bộ phận thu phát với các phần tử khác còn lại của mạng.
Hình 3.7 Cấu trúc lớp vật lý mạng NMEA 2000.
4.3 GIAO DIỆN VÀ MẠNG NMEA 2000 TRÊN TÀU THỦY
Chuẩn mới NMEA 2000 là mạng truyền thông phát triển từ giao diện nối tiếp
NMEA 0183 và dựa trên nền mạng CAN. Chính vì tính năng mạng cùng với xu hƣớng
phát triển cũng nhƣ nhu cầu khai thác, sử dụng thì mạng NMEA 2000 sẽ là chuẩn phổ
biến. Mô hình tổng quan về giao diện và mạng NMEA 2000 áp dụng trên tàu thủy đƣợc
mô tả nhƣ hình 3.8.
Từ mô hình tổng quan này ta thấy, mạng trên tàu thủy bao gồm nhiều mạng LAN
để kết nối với máy tính, thiết bị văn phòng nhƣ máy scan, máy in .... Mạng Ethernet
dựa trên nền MiTS ( Maritime Information Technology Standard) hoạt động với tốc độ
trên 100 Mega bit trên giây và đƣợc sử dụng để kết nối tất cả các thiết bị điện trên tàu
thành một mạng chung. Do đó các thiết bị điện tên tàu có thể truyền thông và trao dổi
thông tin với nhau một cách dễ dàng. Cũng thông qua mạng NMEA 200 này thì các bộ
điều khiển, giám sát lớp trên có thể truy cập trực tiếp vào mạng để thu thập dữ liệu cũng
nhƣ điều khiển trực tiếp các thiết bị này.
Mạng NMEA 2000 cũng hỗ trợ việc tƣơng thích giữa các thiết bị theo chuẩn mới
và chuẩn thiết bị theo chuẩn cũ NMEA 0183. Những bộ bộ cảm biến, la bàn, ... đƣợckết
nối vào mạng thông qua bộ chuyển đổi tín hệu NMEA 0183-NMEA 2000.

45
Hình 3.8 Mô hình giao diện và mạng NMEA 2000 trên tàu biển.
3.4 SỰ CHUYỂN ĐỔI GIỮA NMEA 0183 VÀ NMEA 2000
Mặc dù chuẩn NMEA 2000 ngày càng đƣợc sử dụng rộng rãi nhƣng ở các tàu cũ,
chuẩn NMEA 0183 vẫn đƣợc sử dụng. Ngay cả một số thiết bị đang sử dụng vẫn đƣợc
thiết kế theo chuẩn NMEA 0183 nhƣ thiết bị đo tốc độ gió và hƣớng gió. Vệc nâng cấp
cho hệ thống mạng truyền thông trên tàu và lắp đặt hệ thống mạng truyền thông trên tàu
đóng mới gặp khó khăn do tính không nhất quán giữa các chuẩn và các thiết bị. Một bộ
chuyển đổi giữa chuẩn cũ với chuẩn mới là cần thiết. Việc chuyển đổi nhằm mục đích
cho phép thiết bị đƣợc thiết kế theo chuẩn NMEA 0183 có thể kết nối với mạng NMEA
2000 và truyền, nhận dữ liệu trên mạng. Việc chuyển đổi cấu trúc gói tin từ chuẩn
NMEA 0183 sang chuẩn NMEA 2000 hay từ NMEA 2000 sang NMEA 0183 đƣợc thực
hiện. Dƣới đây là một số gói tin chuyển đổi từ NMEA 2000 sang NMEA 0183.
Administrative
Networks
(Office LANs
Firewal
Integrated
Bridge
System
Monitor and
Logging
Gateway Gateway Gateway
Actuator
Actuator Sensor
Sensor Throttle
control
Transmission
control
Compass Depthsounder
ECDIC
S
Compas
s
Autopilot Gps radar
Optional
Router
Sentor Actuator
Engine
Computer
Fuel
Flow
Shipboard Control
Networks
(Ethernet Based
MiTS )
Intrument Networks
(NMEA 2000)
Dedicated
Connections
(NMEA 0183)

46
Bảng 3.3 Chuyển đổi giữa gói tin NMEA 0183 và PGN NMEA 2000.
Received NMEA 2000 PGN Transmistted NMEA 0183 Sentence Transmit
Default Number Description Acronym Description
126992 System Time ZDA Time & Date On
127245 Rudder RSA Rudder Sensor Angle On
127250 Vessel Heading HDG/HDT Heading, Dev.&Var./Heading,True On
127251 Rate of Turn ROT Rate of Turn On
127257 Attitude RMAROUT Proprietary Maretron Sentence On
127508 Battery Status XDR Transducer Measurement On
128259 Speed VBW Dual Ground/ Water Speed On
128267 Water depth DPT Depth On
128275 Distance Log VLW Dual Ground/ Water Distance On
129025 Position,Rapid Update GLL Geographic Position- Latiude/Longitude Off
129026 COG & SOG, Rapid Update VTG Course Over Ground and Ground Speed On
169029 GNSS Position Data GGA/GNS GPS Fix Data/ GNSS Fix Data On
169029 GNSS Position Data GLL Geographic Position- Latiude/Longitude On
129033 Time & Date ZDA Time & Date On
129539 GNSS DOPS GSA GNSS DOP and Active Satellites Off
129540 GNSS Sats View GSV GNSS Satellites in View On
129540 GNSS Sats View GSA GNSS DOP and Active Satellites On
130306 Wind Data MWD/MWV Wind Dir & Speed/ Wind Speed and Angle On
130310 Environmental Parameters MTW Water Temperature On
130310 Environmental Parameters XDR Transducer Measurement On
Gói tin chuyển từ chuẩn NMEA 2000 sang chuẩn NMEA 0183 sẽ thay đổi về cấu
trúc khung, từ dạng câu lệnh sang dạng khung truyền tham số theo nhóm, nhƣng nội
dung trong gói tin không thay đổi.
Một số chuyển đổi điển hình:
PGN 126992 (System Time) của chuẩn NMEA 2000 mang nội dung về
thời gian hệ thống sẽ đƣợc chuyển đổi tƣơng ứng sang câu lệnh ZDA-
Time & Date của chuẩn NMEA 0183 nhƣ sau:

47
Hình 3.9 Chuyển đổi PGN 126992 sang ZDA
PGN 127245 (Rudder) của chuẩn NMEA 2000 mang thông tin về góc
bánh lái của tàu đƣợc gửi về từ bộ cảm biến góc bánh lái sẽ đƣợc chuyển
đổi sang câu lệnh tƣơng ứng RSA-Rudder Sense Angle của chuẩn NMEA
0183 mang nội dung về góc bánh lái của tàu.
Hình 3.10 Chuyển đổi PGN 127245 sang RSA
PGN 128267 (Water Depth) của chuẩn NMEA 2000 mang thông tin về độ
sâu đƣợc gửi về từ cảm biến đo độ sâu sẽ đƣợc chuyển đổi sang câu lệnh
tƣơng ứng DPT-Depth của chuẩn NMEA 0183 mang thông tin về độ sâu.
3
NMEA 2000 PGN
126992-System Time
Field #
1
2
4
SID
Time
Source
Reserved
Date
Description
5
3
NMEA 0183 Sentence
126992-Time & Date
Field #
1
2
4
UTC
Null
Day,01 to 31
Month, 01 to 12
Year
Description
5
6 Null
3
NMEA 2000 PGN
127245-Rudder
Field #
1
2
4
Rudder Instance
Position
Direction Order
Reserved
Angle Order
Description
5
3
NMEA 0183 Sentence
RSA- Rudder Sense Angle
Field #
1
2
4
Starboard Rudder Sensor
Starboard Status
Null
Null
Description
6 Reserved

48
Hình 3.11 Chuyển đổi PGN 128267 sang DPT
PGN 129025 (Position, Rapid Update) của chuẩn NMEA 2000 mang
thông tin về vị trí tọa độ sẽ đƣợc chuyển sang câu lệnh tƣơng ứng GLL-
Geographic Position Lat/Lon của chuẩn NMEA 0183 mang thông tin về
kinh độ và vĩ độ.
Hình 3.12 Chuyển đổi PGN 129025 sang GLL
1
3
NMEA 0183 Sentence
DPT-Depth
Field #
2
Water Depth Transducer
Offset from Transducer
Null
Description
3
NMEA 2000 PGN
128267-Water Depth
Field #
1
2
4
SID
Water Depth Transducer
Offset
Reserved
Description
NMEA 2000 PGN
128267-Position, Rapid Update
Field #
1
2
Latitude
Longitude
Description
1
3
NMEA 0183 Sentence
GLL-Geographic Position Lat/Lon
Field #
2
Latitude
N/S
Longitude
Description
5
4 E/W
Null
6 Always Transmitted as” V”
7 Always Transmitted as” N”

49
KẾT LUẬN
Ngày nay khi khoa học phát triển việc kết nối các thiết bị trong ngành công
nghiệp tàu thủy đang rất phát triển. Các chuẩn kết nối liên tục đƣợc cải tiến và đƣợc áp
dụng. Việc tìm hiểu các chuẩn truyền thông trong hệ thống nghi khí hàng hải và vô
tuyến điện cung cấp cho ta một cách khái quát về sự phát triển, công nghệ và ứng dụng
của nó. Từ đó giúp ta kết nối các thiết bị đƣợc dễ dàng với nhau đảm bảo việc trao đổi
thông tin giữa các thiết bị là tốt nhất. Với sự quan tâm hƣớng dẫn tận tình của thầy
giáo-ThS. Nguyễn Ngọc Sơn cùng anh chị trong công ty THHH thƣơng mại và dịch vụ
kỹ thuật Hàng Hải (MTS) và nỗ lực của bản thân, em đã hoàn thành đề tài này và hy
vọng rằng nó là tài liệu tham khảo hữu ích sau này. Em xin chân thành cảm ơn sự giúp
đỡ của thầy, các anh trong công ty và bạn bè. Do thời gian làm đề tài có hạn và sự hiểu
biết của em còn hạn chế nên chắc chắn đề tài của em còn có những thiếu sót. Em mong
nhận đƣợc sự góp ý của các thầy cô và các bạn. !
Sinh viên thực hiện
Nguyễn Xuân Trường

50
DANH MỤC CÁC TỪ VIẾT TẮT
IEC : International Electrotechnical Commission
NMEA : National Marine Electronics Association
PGN : Parameter Group Number
VDR Voyage Data Recorder
GPS : Global Positioning System
RADAR : Radio Detection And Ranging
AIS : Automatic Identification System
TÀI LIỆU THAM KHẢO
[1] The NMEA 0183 Protocol
http://www.tronico.fi/OH6NT/docs/NMEA0183.pdf
[3 ] NMEA0183V220
http://www.actisense.com
[4] The NMEA 0183 Information Sheet
http://read.pudn.com/downloads145/doc/comm/633523/NMEA/The%20NMEA%200183
%20Information%20Sheet.pdf
[5] NMEA 2000 Network Fundamentals
http://www8.garmin.com/manuals/GPSMAP4008_NMEA2000NetworkFundamentals.pdf
[6] International Standard
http://webstore.iec.ch/preview/info_iec61162-3%7Bed1.0%7Den.pdf
[7] NMEA 200 Explained – The Latest Word
http://www.nmea.org/Assets/2000-explained-white-paper.pdf
[8] USB100 NMEA 2000® / NMEA 0183 Gateway
http://www.maretron.com/support/manuals/USB100UM_1.2.pdf
[9] NGHIÊN CỨU GIAO DIỆN VÀ MẠNG NMEA 2000® TRÊN TÀU THỦY
http://khcn.vimaru.edu.vn/tckh/sites/default/files/data/So_24_11_2010/88-
Nghien%20cua%20giao%20dien.pdf