nexsense: developing a portable chemical detector using ... · nexsense: developing a portable...
TRANSCRIPT

This document contains information proprietary to Selex ES.Release or disclosure of any information within this documentto any third party is not permitted without written permissionfrom Selex ES.
Nexsense: Developing a Portable Chemical
Detector Using MathWorks Toolsets
Alison Lucie & Ross McLaren
7th October 2014

© 2014 Selex ES Ltd – All rights reserved
In the next 30 minutes we shall talk about:
– Who we are
• Who are Selex ES?
• What is Nexsense?
– The technology behind Nexsense
• How Nexsense works
• A History of the Development
– An overview of the development process
• Traditional route and why this wasn’t the way to go
• The Nexsense development route
• The key advantages behind this
• Verifying the process

Airborne and Space Systems We partner with our Customers to deliver
world class, tailored and proven airborne
integrated systems, sensors and training
for military and security ISR/ISTAR
manned and unmanned operations
through a successful, customer focused
business

© 2014 Selex ES Ltd – All rights reserved
Key Capabilities Multi-platform, world class ISR/ISTAR systemsScalable mission systems, AESA and M-scan multimoderadar, electro-optical turrets, navigation aids, lightweightW/ELINT systems, CNI.
Complete, independent UAS capabilityMission systems, platforms, ground control stations, Battle-labs, training and paid by the hour services.
Combat proven electronics for fixedand rotary wingFixed and repositionable AESA and M-scan radar, complete integrated electronic warfare systems, lightweight high performance DIRCM systems, IRST, high power targeting laser.
Multi-mission highly realistic trainingNetworked, intelligent synthetic environments withmulti-platform interaction for advanced training.
Avionics
High performance computers, human to machine electronic controls
and displays, internal and external lighting systems.
Earth observation and precise positioning systemsMultispectral sensors, star trackers, power equipment, atomic clocks and solar panels.

© 2014 Selex ES Ltd – All rights reserved
• Hand held chemical detector, capable of the detection and
identification of a range of toxic industrial chemicals.
• FAIMS - “Field Asymmetric Ion Mobility Spectrometry”
• (a.k.a. HiFAWS – “High Field Asymmetric Wave
Spectrometry)
• Exploits high-field mobility vs. field strength relationship
• Initially developed in FSU and first reported in mid 1990s
• Laboratory-only technique until (relatively) recently
• Advantages over IMS
• Continuous operation (rather than shuttered)
• improved response time & sensitivity
• Can be readily miniaturised – same scaling laws do not
apply
• Pseudo-orthogonality - potential for superior selectivity
Nexsense – Handheld Chemical Detector

© 2014 Selex ES Ltd – All rights reserved
Development History
2008
2009
2007
20102011-
Owlstone Tourist:Data gathering & technology familiarisation
First prototype:Self contained sensor, offline data processing
‘Ruggedised’ prototype:Embedded data processing & local display.‘Handheld’ prototype:
Corona discharge ionisation
‘Productionised’ Nexsense
© 2014 Selex ES Ltd – All rights reserved
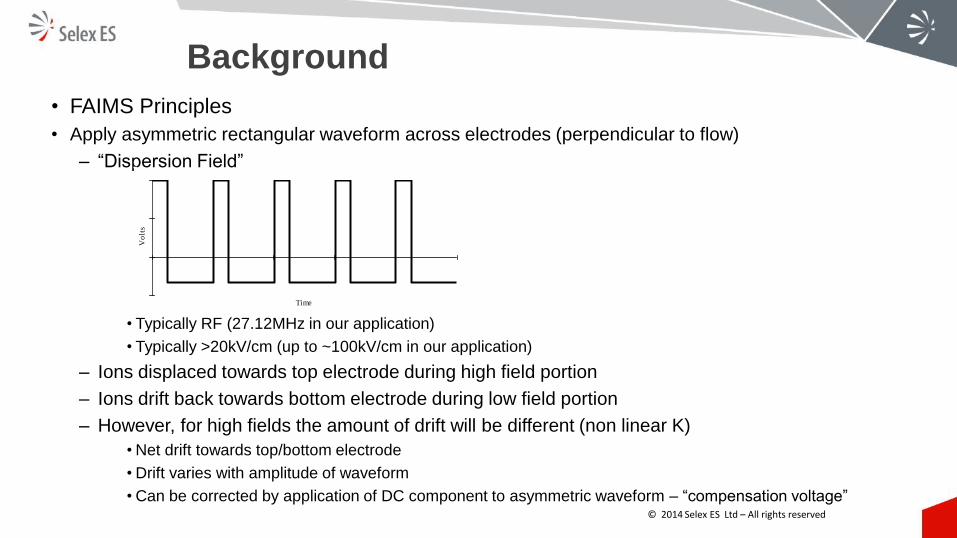
• FAIMS Principles
• Apply asymmetric rectangular waveform across electrodes (perpendicular to flow)
– “Dispersion Field”
• Typically RF (27.12MHz in our application)
• Typically >20kV/cm (up to ~100kV/cm in our application)
– Ions displaced towards top electrode during high field portion
– Ions drift back towards bottom electrode during low field portion
– However, for high fields the amount of drift will be different (non linear K)
• Net drift towards top/bottom electrode
• Drift varies with amplitude of waveform
• Can be corrected by application of DC component to asymmetric waveform – “compensation voltage”
Time
Vo
lts
Background

© 2014 Selex ES Ltd – All rights reserved
Background
• FAIMS Principles of Operation
– Ions are swept through filter electrodes which are driven with an asymmetric waveform.
– The ions oscillate through the filter moving a different speeds during the high field period
compared with the low field period
– Compensation voltage added to dispersion voltage to focus ions onto detector
0KK
0KK
T
Ion
detector
-3 -2 -1 0 1 2 3CV
Ion
Cu
rren
t -ΔK +ΔK
© 2014 Selex ES Ltd – All rights reserved
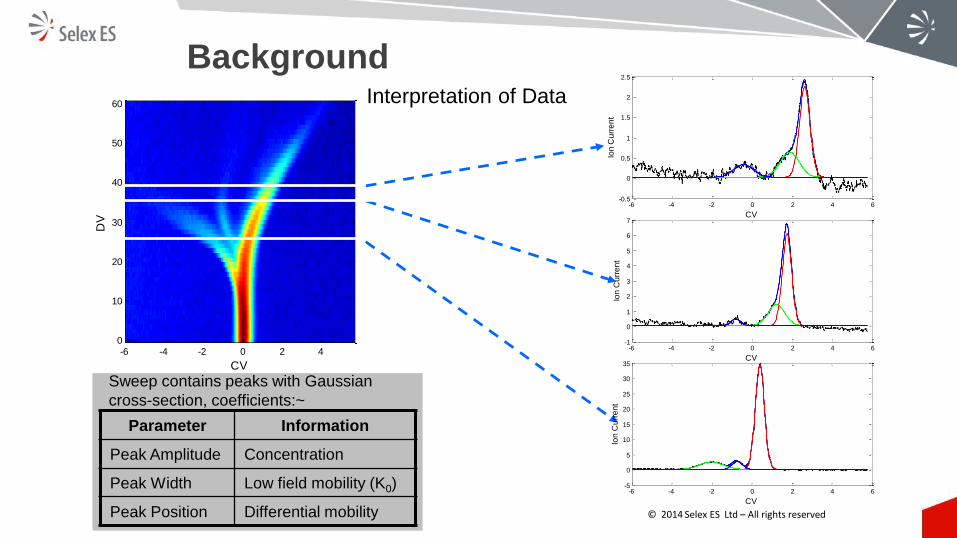
Interpretation of Data
CV
DV
Positive
-6 -4 -2 0 2 40
10
20
30
40
50
60
-6 -4 -2 0 2 4 6-5
0
5
10
15
20
25
30
35
CV
Ion
Cu
rre
nt
-6 -4 -2 0 2 4 6-1
0
1
2
3
4
5
6
7
CV
Ion
Cu
rre
nt
-6 -4 -2 0 2 4 6-0.5
0
0.5
1
1.5
2
2.5
CV
Ion
Cu
rre
nt
Sweep contains peaks with Gaussian
cross-section, coefficients:~
Parameter Information
Peak Amplitude Concentration
Peak Width Low field mobility (K0)
Peak Position Differential mobility
Background

© 2014 Selex ES Ltd – All rights reserved
Background
• Practical Implementation
– Silicon MEMS device in ceramic package
– Multiple electrode channels arranged in parallel

© 2014 Selex ES Ltd – All rights reserved
The 10 TICs
© 2014 Selex ES Ltd – All rights reserved
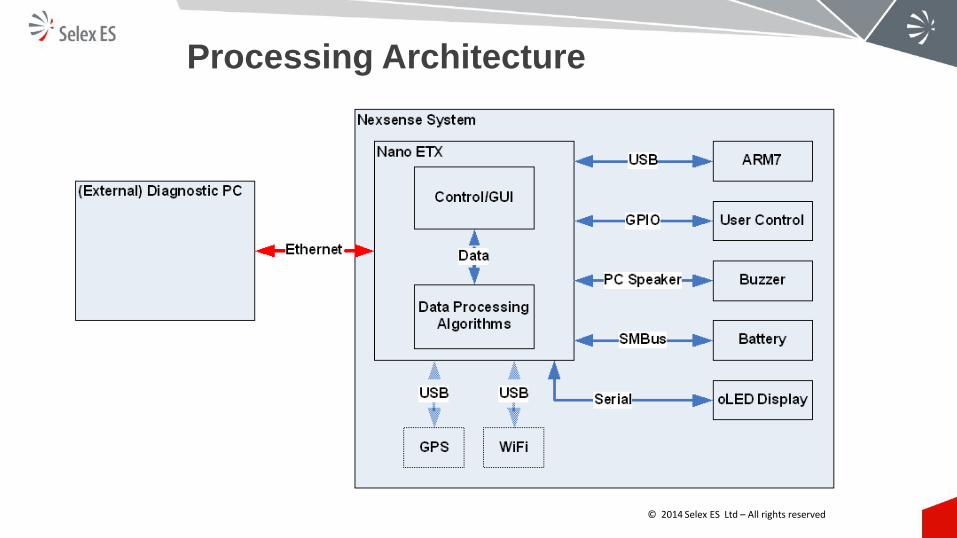
Processing Architecture
© 2014 Selex ES Ltd – All rights reserved
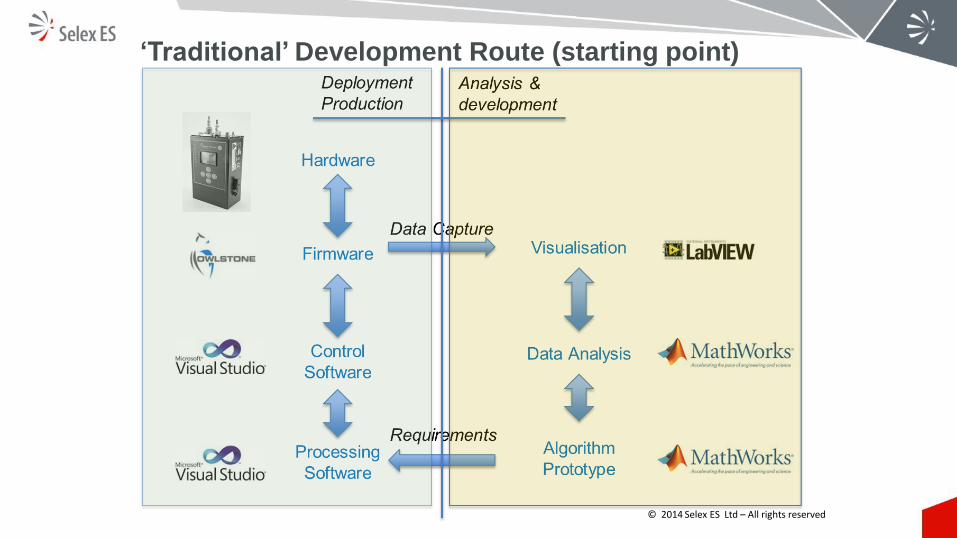
‘Traditional’ Development Route (starting point)

© 2014 Selex ES Ltd – All rights reserved
‘Traditional’ Development Route - Issues

© 2014 Selex ES Ltd – All rights reserved
Where Algorithms Fit Into the Development Route (end point)

© 2014 Selex ES Ltd – All rights reserved
• Visualising the data that is to be analysed:• Better understanding of how the data is
captured• Exposed unknown pre-processing chain in
data capture
• Easy Re-use• Visualisation tool developed for sensor
directly useable in MATLAB for fast data
inspection
• Simple to Update• Add functionality as and when identified
• Carved the way• Simple to do, indicated should be simple
process for adding algorithms onto units
directly with MATLAB tools
Visualisation
Data Analysis
Advantages

© 2014 Selex ES Ltd – All rights reserved
• Developing & Deploying Algorithms using
the same tools:• Rapid Prototyping
• Access to Toolboxes
• Minimise Human Error• No misinterpretations in code handover
• Each version of code is written once, in
MATLAB
• Simple Development & test cycle• One line of code to build DLL
• Same team to develop code and test
deployment (no handover)
• Easy to Expand• Once the process is tested and verified, it
is easy to upgrade with new algorithm
releases – expand and improve product
capabilities quickly
Advantages

© 2014 Selex ES Ltd – All rights reserved
• Suite of M-files to a DLL • One line of code to generate DLL
• Move DLL to sensor, ready to test
• Very quick and simple
• Why DLL?• Why not use MATLAB Coder – verifying the generated C code would easier?
• Use of other toolboxes (e.g. wavelet toolbox)
• Legacy reasons (r2006b)
Practicalities – Deployment Method
© 2014 Selex ES Ltd – All rights reserved
• MATLAB Functions• Profiler for finding bottle-necks
• Code Analyser for static analysis
• Check code for McCabe complexity (code needs to be testable)
• Unit Testing• Exercise all paths in the code
• Verify code changes
• Generate DLL• Verbose version created
• Can then verify internal test points with original code
• Acceptance Testing• As part of full system test procedure.
• Detect & Identification needs to be successful => code is working as
expected
• Deploy and Deliver• With documentation formed by all the above stages
Practicalities – Verification

© 2014 Selex ES Ltd – All rights reserved
Rapid Routes to Recovery When Things Go Wrong

© 2014 Selex ES Ltd – All rights reserved
• Nexsense chemical sensor was developed in a relatively short time period
• Multiple threat identification capability on a hand-held device
• From first built prototype to first production-standard sensor delivered in under a
year
• Use of the MATLAB toolset enabled the demanding schedule to be met
• Rapid development of algorithms using various toolsets (e.g. image processing,
wavelets)
• Rapid deployment to DLL avoided long-lead times for software hand-over (no need
to re-write code)
• Enabled fast re-iterations and testing
• Verification & Validation framework established
• When things went wrong, there was a good architecture in place to enable a fast and
effective recovery plan
Summary

THANK YOU FOR YOUR ATTENTION