nao technical brochure
DESCRIPTION
NAO Technical Brochure - Aldebaran RoboticsTRANSCRIPT

877.455.9369 | teq.com
PMS 306C
PMS 3005C
50% Black

877.455.9369 | teq.com

877.455.9369 | teq.com 1
PROFESSIONAL DEVELOPMENT
Col
lege
and Career Readiness
Man
ufa
ctur
ing
Artificial Intelligence
Robotics
Engineering
Design ThinkingEnvironmental Science
Rese
arch
& D
evel
opm
ent
Common Core Standards for
ELA & Literacy
Next Generation
ScienceStandards
Common Core Standards for
Mathematics
Coding
The Future Begins with NAO
Create a partnership with Teq’s PD team. Customize NAO instruction for your school’s various subjects and curricula.
Teq’s professional development provides the framework for a STEM-centered curriculum, focusing NAO instruction towards the Common Core Learning Standards, to better prepare your students for post-secondary education and thriving careers in STEM-based industries.

877.455.9369 | teq.com

877.455.9369 | teq.com 3
TORSO RObOT PLATFORM
TORSO
AUDIOVISUAL & GESTURE INTERACTION>> Intel Atom Processor
>> Enhanced Audio Visual Capabilities
KEY bENEFITS >> Fully programmable, open and autonomous: fully integrate this state-of-the-art hardware and software
>> Easy to use and understand: achieve better project results and improve learning effectiveness
USE CASES >> STEM (Science, Technology, Engineering and Mathematics) training and exercises
>> Scientific research in autism and personal assistance
PARTS INCLUDEDHumanoid Robot
Charger
Choregraphe Software single-seat license with Webots
ENHANCED AUDIO AND VISUAL CAPAbILITIES
CAMERA Thanks to improved camera sensors, we provide higher sensitivity in VGA for better low light perception. For image processing work on the robot CPU, you can use up to 30 images/second in HD resolution. NAO can move his head 239° horizontally and 68° vertically, and his camera can see 61° horizontally and 47° vertically. Result: NAO has a great capacity to sense his environment.
ObjECT NAO has the capacity to recognize a large quantity of objects. Once the object isRECOGNITION saved to the Choregraphe software, NAO is able to recognize the object and say
what it is.
FACE DETECTION One of the best known features for interaction, NAO can detect and learn a faceAND RECOGNITION in order to recognize it next time.
TExT TO SPEECH NAO is able to speak up to nine languages. With a “say box” in Choregraphe you can insert text and modify voice parameters. NAO will say the text correctly, with the correct punctuation and intonation.
AUTOMATIC SPEECH Speech recognition is at the heart of intuitive human-robot interaction. RECOGNITION We have chosen the best technological partner, Nuance, to develop stable and
powerful speech recognition. NAO is able to hear you from two meters away, and recognize a complete sentence, or just a few words in the sentence. Result: more fluidity and natural conversations.
SOUND DETECTION Our environment is made of sounds that NAO is able to detect and localizeAND LOCALIzATION thanks to microphones all around his head.
4 877.455.9369 | teq.com
TECHNICAL SPECIFICATIONS
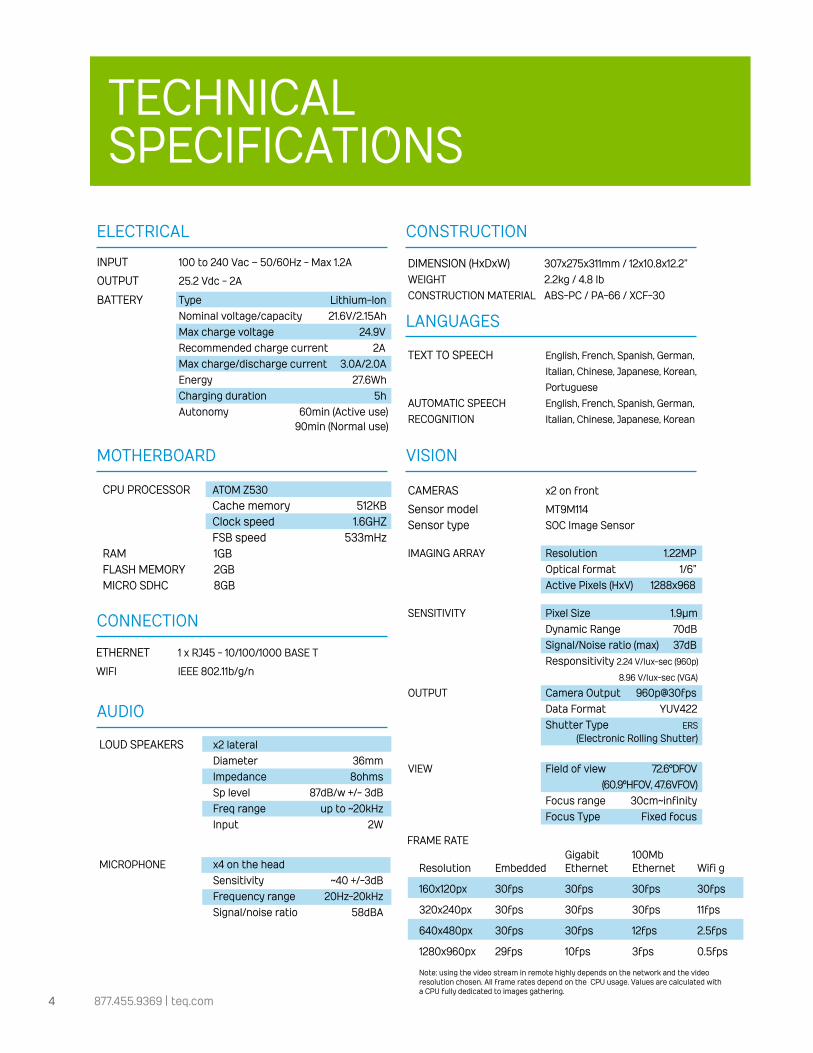
LANGUAGES
VISION
ELECTRICAL
INPUT 100 to 240 Vac – 50/60Hz - Max 1.2A
OUTPUT 25.2 Vdc - 2A
bATTERY Type Lithium-Ion Nominal voltage/capacity 21.6V/2.15Ah Max charge voltage 24.9V Recommended charge current 2A Max charge/discharge current 3.0A/2.0A Energy 27.6Wh Charging duration 5h Autonomy 60min (Active use) 90min (Normal use)
CAMERAS x2 on front
Sensor model MT9M114Sensor type SOC Image Sensor
IMAGING ARRAY Resolution 1.22MP Optical format 1/6” Active Pixels (HxV) 1288x968
SENSITIVITY Pixel Size 1.9µm Dynamic Range 70db Signal/Noise ratio (max) 37db Responsitivity 2.24 V/lux-sec (960p)
8.96 V/lux-sec (VGA)
OUTPUT Camera Output 960p@30fps Data Format YUV422 Shutter Type ERS (Electronic Rolling Shutter)
VIEW Field of view 72.6°DFOV (60.9°HFOV, 47.6VFOV) Focus range 30cm~infinity Focus Type Fixed focus
CONNECTION
ETHERNET 1 x Rj45 - 10/100/1000 bASE T
WIFI IEEE 802.11b/g/n
CONSTRUCTION
DIMENSION (HxDxW) 307x275x311mm / 12x10.8x12.2”WEIGHT 2.2kg / 4.8 lbCONSTRUCTION MATERIAL AbS-PC / PA-66 / xCF-30
TExT TO SPEECH English, French, Spanish, German,
Italian, Chinese, japanese, Korean,
Portuguese
AUTOMATIC SPEECH English, French, Spanish, German,
Italian, Chinese, japanese, KoreanRECOGNITION
MOTHERbOARD
CPU PROCESSOR ATOM z530 Cache memory 512Kb Clock speed 1.6GHz FSb speed 533mHzRAM 1GbFLASH MEMORY 2GbMICRO SDHC 8Gb
AUDIO
LOUD SPEAKERS x2 lateral Diameter 36mm Impedance 8ohms Sp level 87db/w +/- 3db Freq range up to ~20kHz Input 2W
MICROPHONE x4 on the head Sensitivity ~40 +/-3db Frequency range 20Hz-20kHz Signal/noise ratio 58dbA
Resolution EmbeddedGigabit Ethernet
100Mb Ethernet Wifi g
160x120px 30fps 30fps 30fps 30fps
320x240px 30fps 30fps 30fps 11fps
640x480px 30fps 30fps 12fps 2.5fps
1280x960px 29fps 10fps 3fps 0.5fps
FRAME RATE
Note: using the video stream in remote highly depends on the network and the video resolution chosen. All frame rates depend on the CPU usage. Values are calculated with a CPU fully dedicated to images gathering.

877.455.9369 | teq.com 5WWW.ALDEBARAN-ROBOTICS.COM 4 / 5
TECHNICAL SPECIFICATIONS
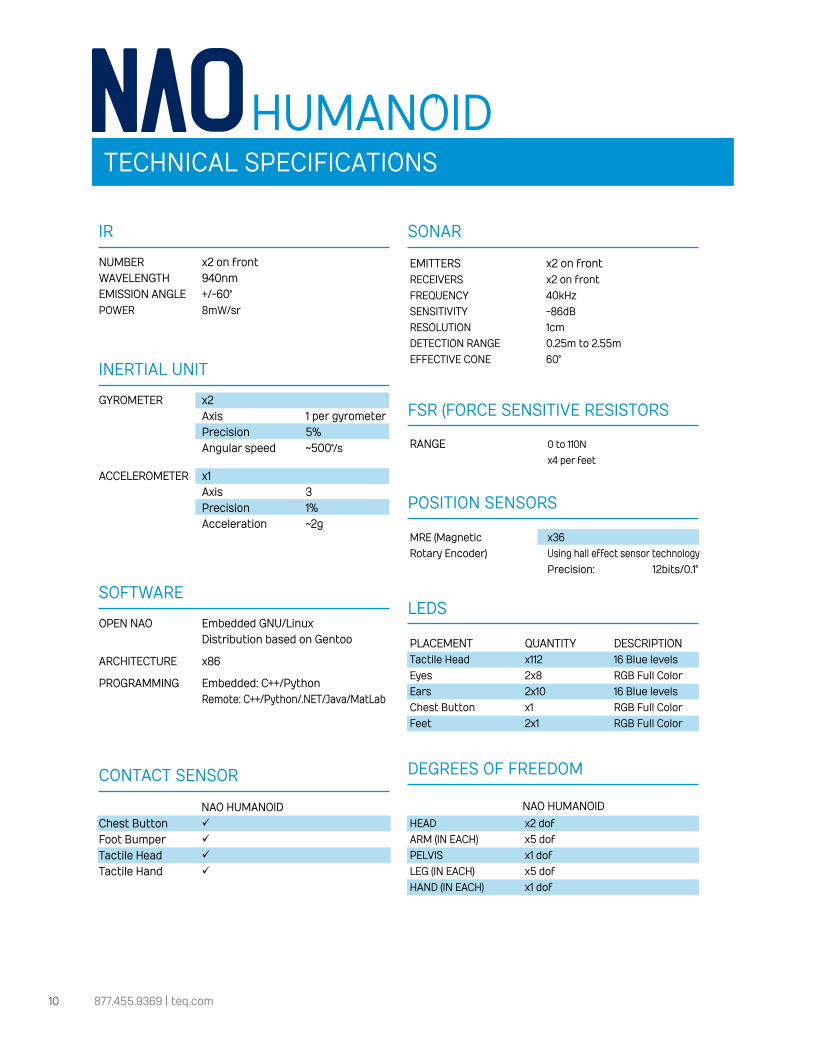
NUMBERWAVELENGTHEMISSION ANGLEPOWER
×2 on front940nm+/-60°8mW/sr
IR
EMITTERSRECEIVERSFREQUENCYSENSITIVITYRESOLUTIONDETECTION RANGEEFFECTIVE CONE
×2 on front×2 on front40kHz-86dB1cm0.25m to 2.55m60°
SONAR
GYROMETER
ACCELEROMETER
×2AxisPrecisionAngular speed
1 per gyrometer5%
~500°/s
×1AxisPrecisionAcceleration
31%~2g
INERTIAL UNIT
CONTACT SENSOR
Chest ButtonTactile HeadTactile Hand
OPEN NAO
ARCHITECTURE
PROGRAMMING
Embedded GNU/LinuxDistribution based on Gentoo
×86
Embedded: C++ / PythonRemote: C++ / Python / .NET / Java / MatLab
SOFTWARE
LEDS
PLACEMENT QUANTITY DESCRIPTIONTactile HeadEyesEarsChest button
×122×82×10×1
16 Blue levelsRGB FullColor16 Blue levelsRGB FullColor
HEADARM (IN EACH)HAND (IN EACH)
×2 dof×5 dof×1 dof
×14
DEGREES OF FREEDOM
NAO TORSO
NAO TORSO
MRE (Magnetic Rotary Encoder) Using hall effect sensor technology
Precision:
POSITION SENSORS
12bits / 0.1°
TORSOTECHNICAL SPECIFICATIONS
TORSO

6 877.455.9369 | teq.com
WWW.ALDEBARAN-ROBOTICS.COM 5 / 5
MOTOR SPECIFICATIONS
HEAD JOINTS
MOTOR TYPE
MOTOR REDUCTION RATIO
ARM JOINTS
HeadYawHeadPitch
Brush DC Coreless
ShoulderPitchShoulderRollElbowYawElbowRollWristYawHand
Type 2Type 2
Type 2Type 2Type 2Type 2Type 2Type 2
Type AType B
Type AType BType AType BType CType D
POSITION OF MOTORS
DESCRIPTION OF THE MOTORS
SPEED REDUCTION RATIO TYPE C
SPEED REDUCTION RATIO TYPE A
SPEED REDUCTION RATIO TYPE D
SPEED REDUCTION RATIO TYPE B
MOTOR TYPE 2 MOTOR TYPE 2
MOTOR TYPE 2
MOTOR TYPE 2 MOTOR TYPE 2
ModelNo load speedStall torqueContinuous torque
Reduction ratio
Reduction ratio
Reduction ratio
Reduction ratio50.61 36.24
17N88208E8400rpm ±12%9.4mNm ±8%4.9mNm max
150.27 173.22
©2012 Aldebaran Robotics. November 2012. Data are subject to change without notice.
CERTIFICATIONS& APPROVALS
REGION
ELECTROMAGNETIC COMPATIBILITY
SAFETY
CLASSIFICATIONEuropeUSA
IEC 60950-1:2005 (2nd edition)
CE (Declaration of Conformity)FCC
EN 301 489-1 / EN 301 489-17 / EN 300 328 EN 62311 : 2008 / FCC PART15, Class A
TORSO
HeadYaw [2][A]
ShoulderPitch [2][A]
ElbowRoll [2][B]
WristYaw [2][C]Hand [2][D]
Legend: Joint Name[Motor Type][Reductor Type]
HeadPitch [2][B]
ShoulderRoll [2][B]
ElbowYaw [2][A]
MOTOR SPECIFICATIONS
TORSO

877.455.9369 | teq.com 7
HUMANOID RObOT PLATFORM
HUMANOID
ALL-PURPOSE HUMANOID RObOT>> Intel Atom Processor
>> Enhanced Audio Visual Capabilities
>> Natural Motion Reflexes
KEY bENEFITS >> Fully programmable, open and autonomous: fully integrate this state-of-the-art hardware and software
>> Easy-to-use and understand: achieve better project results and improve learning effectiveness
>> Attractive and motivating: increase engagement and catch audience attention
USE CASES >> STEM (Science, Technology, Engineering and Mathematics) training and exercises
>> Scientific research in autism and personal assistance
>> Communication tool for events such as open house days
ExAMPLES OF APPLICATION
EDUCATION >> Programming >> Math and Physics Concepts for Robotic
Applications >> Motion Planning >> Introduction to Object/Speech Recognition
and Detection >> Create Games and Stories >> Mechatronics >> Automation
RESEARCH >> Human Robot Interaction >> Perception and Cognition >> Object Category Recognition and Detection >> Modeling Expressive Gestures >> Localization and Navigation >> Movement Synchronization of Robot >> Structure and Motion Analysis >> Psychology and Social Robotics >> Artificial Intelligence
PARTS INCLUDEDHumanoid Robot
Charger
Choregraphe Software single-seat license with Webots

8 877.455.9369 | teq.com
ENHANCED AUDIO AND VISUAL CAPAbILITIES
CAMERA Thanks to improved camera sensors, we provide higher sensitivity in VGA for better low light perception. For image processing work on the robot CPU, you can use up to 30 images/second in HD resolution. NAO can move his head 239° horizontally and 68° vertically, and his camera can see 61° horizontally and 47° vertically. Result: NAO has a great capacity to sense his environment.
ObjECT RECOGNITION NAO has the capacity to recognize a large quantity of objects. Once the object is saved to the Choregraphe software, NAO is able to recognize and say what it is.
FACE DETECTION AND One of the best known features RECOGNITION for interaction, NAO can detect and learn
a face in order to recognize it next time.
TExT TO SPEECH NAO is able to speak up to nine languages. With a “say box” in Choregraphe you can insert text and modify voice parameters. NAO will say the text correctly, with the correct punctuation and intonation.
AUTOMATIC SPEECH Speech recognition is at the heart ofRECOGNITION intuitive human-robot interaction. We
have chosen the best technological partner, Nuance, to develop stable and powerful speech recognition. NAO is able to hear you from two meters away, and recognize a complete sentence, or just a few words in the sentence. Result: more fluidity and natural conversations.
SOUND DETECTION Our environment is made of sounds that AND LOCALIzATION NAO is able to detect and localize thanks
to microphones all around his head.
HUMANOID RObOT PLATFORM
HUMANOID

877.455.9369 | teq.com 9
TECHNICAL SPECIFICATIONS
LANGUAGES
VISION
ELECTRICAL
INPUT 100 to 240 Vac – 50/60Hz - Max 1.2A
OUTPUT 25.2 Vdc - 2A
bATTERY Type Lithium-Ion Nominal voltage/capacity 21.6V/2.15Ah Max charge voltage 24.9V Recommended charge current 2A Max charge/discharge current 3.0A/2.0A Energy 27.6Wh Charging duration 5h Autonomy 60min (Active use) 90min (Normal use)
CAMERAS x2 on front
Sensor model MT9M114Sensor type SOC Image Sensor
IMAGING ARRAY Resolution 1.22MP Optical format 1/6” Active Pixels (HxV) 1288x968
SENSITIVITY Pixel Size 1.9µm Dynamic Range 70db Signal/Noise ratio (max) 37db Responsitivity 2.24 V/lux-sec (960p)
8.96 V/lux-sec (VGA)
OUTPUT Camera Output 960p@30fps Data Format YUV422 Shutter Type ERS (Electronic Rolling Shutter)
VIEW Field of view 72.6°DFOV (60.9°HFOV, 47.6VFOV) Focus range 30cm~infinity Focus Type Fixed focus
CONNECTION
ETHERNET 1 x Rj45 - 10/100/1000 bASE T
WIFI IEEE 802.11b/g/n
CONSTRUCTION
DIMENSION (HxDxW) 573x275x311mm / 22.5x10.8x12.2”WEIGHT 5.2kg / 11.4 lbCONSTRUCTION MATERIAL AbS-PC / PA-66 / xCF-30
TExT TO SPEECH English, French, Spanish, German,
Italian, Chinese, japanese, Korean,
Portuguese
AUTOMATIC SPEECH English, French, Spanish, German,
Italian, Chinese, japanese, KoreanRECOGNITION
MOTHERbOARD
CPU PROCESSOR ATOM z530 Cache memory 512Kb Clock speed 1.6GHz FSb speed 533mHzRAM 1GbFLASH MEMORY 2GbMICRO SDHC 8Gb
AUDIO
LOUD SPEAKERS x2 lateral Diameter 36mm Impedance 8ohms Sp level 87db/w +/- 3db Freq range up to ~20kHz Input 2W
MICROPHONE x4 on the head Sensitivity ~40 +/-3db Frequency range 20Hz-20kHz Signal/noise ratio 58dbA
Resolution EmbeddedGigabit Ethernet
100Mb Ethernet Wifi g
160x120px 30fps 30fps 30fps 30fps
320x240px 30fps 30fps 30fps 11fps
640x480px 30fps 30fps 12fps 2.5fps
1280x960px 29fps 10fps 3fps 0.5fps
FRAME RATE
Note: using the video stream in remote highly depends on the network and the video resolution chosen. All frame rates depend on the CPU usage. Values are calculated with a CPU fully dedicated to images gathering.
10 877.455.9369 | teq.com
TECHNICAL SPECIFICATIONS
HUMANOID
IR
NUMbER x2 on frontWAVELENGTH 940nmEMISSION ANGLE +/-60˚POWER 8mW/sr
SOFTWARE
OPEN NAO Embedded GNU/Linux Distribution based on Gentoo
ARCHITECTURE x86
PROGRAMMING Embedded: C++/Python Remote: C++/Python/.NET/java/MatLab
CONTACT SENSOR
Chest button üFoot bumper üTactile Head üTactile Hand ü
INERTIAL UNIT
GYROMETER x2 Axis 1 per gyrometer Precision 5% Angular speed ~500˚/s
ACCELEROMETER x1 Axis 3 Precision 1% Acceleration ~2g
POSITION SENSORS
MRE (Magnetic x36 Rotary Encoder) Using hall effect sensor technology Precision: 12bits/0.1˚
LEDS
PLACEMENT QUANTITY DESCRIPTIONTactile Head x112 16 blue levelsEyes 2x8 RGb Full ColorEars 2x10 16 blue levelsChest button x1 RGb Full ColorFeet 2x1 RGb Full Color
DEGREES OF FREEDOM
HEAD x2 dofARM (IN EACH) x5 dofPELVIS x1 dofLEG (IN EACH) x5 dofHAND (IN EACH) x1 dof
SONAR
EMITTERS x2 on frontRECEIVERS x2 on frontFREQUENCY 40kHzSENSITIVITY -86dbRESOLUTION 1cmDETECTION RANGE 0.25m to 2.55mEFFECTIVECONE 60˚
FSR (FORCE SENSITIVE RESISTORS
RANGE 0 to 110N
x4 per feet
NAO HUMANOID NAO HUMANOID

877.455.9369 | teq.com 11WWW.ALDEBARAN-ROBOTICS.COM 6 / 6
MOTOR SPECIFICATIONS
HEAD JOINTS
MOTOR TYPE
MOTOR REDUCTION RATIO
ARM JOINTS
LEG JOINTS
HeadYawHeadPitch
Brush DC Coreless
ShoulderPitchShoulderRollElbowYawElbowRollWristYawHand
HipYawPitchHipRollHipPitchKneePitchAnklePitchAnkleRoll
Type 3Type 3
Type 3Type 3Type 3Type 3Type 2Type 2
Type 1Type 1Type 1Type 1Type 1Type 1
Type AType B
Type AType BType AType BType CType D
Type AType AType BType BType BType A
POSITION OF MOTORS
HUMANOID
DESCRIPTION OF THE MOTORS
SPEED REDUCTION RATIO TYPE C
SPEED REDUCTION RATIO TYPE A
SPEED REDUCTION RATIO TYPE D
SPEED REDUCTION RATIO TYPE B
MOTOR TYPE 1
MOTOR TYPE 1
MOTOR TYPE 2
MOTOR TYPE 1
MOTOR TYPE 2
MOTOR TYPE 2 MOTOR TYPE 3
MOTOR TYPE 3 MOTOR TYPE 3
ModelNo load speedStall torqueContinuous torque
Reduction ratio
Reduction ratio
Reduction ratio
Reduction ratio
16GT83210E10700rpm ±10%14.3mNm ±8%6.2mNm max
201.3
50.61
130.85
36.24
17N88208E8400rpm ±12%9.4mNm ±8%4.9mNm max
22NT82213P8300rpm ±10%68mNm ±8%16.1mNm max
150.27 173.22
HeadYaw [3][A]
ShoulderPitch [3][A]
ElbowRoll [3][B]
HipYawPitch [1][A]
WristYaw [2][C]Hand [2][D]
HipRoll [1][A]HipPitch [1][B]
KneePitch [1][B]
AnklePitch[1][B]
Legend: Joint Name[Motor Type][Reductor Type]
AnkleRoll[1][A]
HeadPitch [3][B]
ShoulderRoll [3][B]
ElbowYaw [3][A]
©2012 Aldebaran Robotics.November 2012. Data are subject to change without notice.
CERTIFICATIONS& APPROVALS
REGION
ELECTROMAGNETIC COMPATIBILITY
SAFETY
CLASSIFICATIONEuropeUSA
IEC 60950-1:2005 (2nd edition)
CE (Declaration of Conformity)FCC
EN 301 489-1 / EN 301 489-17 / EN 300 328 EN 62311 : 2008 / FCC PART15, Class A
MOTOR SPECIFICATIONS

877.455.9369 | teq.com

877.455.9369 | teq.com 13
1 / 1
TEACH MECHANICS WITH A PART OF NAO’S BODY
Understand NAO’s ankle and its conception through CAD files
Explore how NAO ankle is built by dismantling it
»
»
»
»
KEY BENEFITS
USE CASES
Inspire a high level of motivation by putting theory into practice
Discover robotics related fields such as mechanics by accessing internal components and disassembling the ankle
MECHANICS EDITION
THE NAO ANKLE KIT MECHANICS EDITION INCLUDES:NAO'S ANKLE: PERFORM MECHANICS STUDIES WITH A PART OF NAO THAT CAN BE DISASSEMBLEDRESOURCES: UNDERSTAND THE CONCEPTION OF THE ANKLE WITH DOCUMENTS SUCH AS CAD FILES
STUDENTS CAN LEARN MECHANICS AND EXPLORE HUMANOID PART CONCEPTION WITH NAO ANKLE KIT.
»»
QUANTITY DESCRIPTION×1×1×1
NAO's ankle - Mechanics Edition*ManualDVD with resources (CAD files…)
* No electronic boards and no motors.
PARTS INCLUDED CONSTRUCTION
DIMENSION (H×D×W)WEIGHT
160x160x90mm / 6.3x6.3x3.5inches420g/0.93lb
>
Shells can be dismantled with a screwdriver* to discover how NAO’s ankle is designed.
* Not provided.
TECHNICAL SPECIFICATIONS
ANKLE KIT
[email protected] +33 1 77 37 17 [email protected] +1 617 963 0394 [email protected] +86 21 6135 8998©2012 Aldebaran Robotics. October 2012. Data are subject to change without notice.
MECHANICS EDITION
ANKLE
LEARN MECHANICS AND ExPLORE HUMANOID PART CONCEPTION WITH THE NAO ANKLE KIT>> Perform mechanics studies with a part of NAO that
can be disassembled
>> Understand mechanic development with
documents such as CAD files
PARTS INCLUDEDAnkle
ResourcesKEY bENEFITS >> Inspire a high level of motivation by
putting theory into practice >> Discover robotics-related fields such
as mechanics by accessing internal components and disassembling the ankle
USE CASES >> Understand NAO’s ankle and its conception through CAD files
>> Explore how NAO’s ankle is built by dismantling it
CONSTRUCTION

14 877.455.9369 | teq.com
MECHATRONICS EDITION
ANKLE
LEARN MECHATRONICS AND CONDUCT ExPERIMENTS USING A PART OF NAO’S bODY>> Perform studies on the command of a two-
axis system which has the same electronic and
mechanical components as NAO
>> Launch commands and visualize ankle joints and
sensor data
>> Understand robot development thanks to provided
CAD or schematic files
KEY bENEFITS FOR STUDENTS >> Discover robotics-related fields such
as mechatronics by experiencing and connecting theory with practice
>> Inspire a high level of motivation and interest for engineering or technical careers by working on a limb extracted from a humanoid robot
FOR TEACHERS >> Get students to think like engineers or
technicians by analyzing differences between virtual and real fields
>> Use a project-or lab-based approach for teaching mechatronics
USE CASES >> Control: define two DOF system control laws, apply PWN on each motor, or recover measures on actuators positions
>> Mechanics: examine NAO’s ankle conception through provided ankle CAD Solidworks files
>> Electronics: study energy and information chains through provided schematics or datasheets
PARTS INCLUDEDAnkle
Software
Resources

877.455.9369 | teq.com 15
TECHNICAL SPECIFICATIONS
ANKLE
SOFTWARE REQUIREMENTS
CONSTRUCTION
ELECTRICAL
PARTS INCLUDED SOFTWARES
SENSORS & MOTORS
QUANTITY DESCRIPTION
x1 NAO’s ankle-Mechatronics Edition
x1 Power adaptor with UK, EU, US, & AUS Input plugs
x1 Squid connector cable
x1 Quick Start Guide
x1 DVD with manual, softwares, and resources (CAD files, component datasheets, electrical schemes...)
ANKLE CONTROLLER
Signal Generator: step, ramp, sine, parabola, or custom with CSV data file
Loop control: open or close loop with PID parameters
Visualization: Direct graph visualization
Export data: CSV file
Diagnostics: Software version, firmware version, MREs calibration
ANKLE CONTROLLER API
Signal Generator: CSV data (time offset, period, amplitude, duration)
Loop control: open or close loop with PID parameters
Export Data: CSV file (current, angular speed, PWM signal, error between real and theory signal, gear ratio, MRE positions, time of recording, PID parameters)
Programming: C++
MATLAb
Simulation: Formulate, edit, and solve the equations of motion for the NAO Ankle Kit mechanical system.
Control: Directly command the NAO Ankle Kit with Simulink
MRE (MAGNETIC ROTARY ENCODER)
x4Using hall effect sensor technology
Precision: 12bits / 0.1°
MOTOR TYPE brush DC Coreless
Model 22NT82213P
Number x2
No load speed 8300 rpm ± 10%
Stall torque 68 mNm ± 8%
Continuous torque 16.1 mNm max
SPEED REDUCTION RATIO
Anklepitch 130.85
Ankleroll 201.3
ELECTRICAL INPUT 24Vdc–Max 1.8A
POWER ADAPTOR 24Vdc/1.8A AC input with UK, EU, US & AUS input plugs
SQUID CAbLE Connector cable with female USb, jack connector and male USb
DIMENSION (HxDxW) 160x160x90mm / 6.3x6.3x3.5inches
WEIGHT 560g/1.24lb
OS Windows 7 / xP, Mac OS x 10.6/10.7 or GNU/Linux Ubuntu 10.01/10.10
SYSTEM 1.5GHzCPU / 512 Mb RAM / 100 Mb free disk space
www.aldebaran-robotics.comemea @aldebaran-robotics.com +33 1 77 37 17 52americas @aldebaran-robotics.com +1 617 963 0394 asia-paci�c @aldebaran-robotics.com +86 21 6135 8998
©2012 Aldebaran Robotics. October 2012. Data are subject to change without notice.
2/ 2
TECHNICAL SPECIFICATIONS
Signal generator:
Loop control:Visualization: Export data:Diagnostics:
Signal generator:Loop control:Export data:
Programming:
Simulation :
Control:
step, ramp, sine, parabola, or custom with CSV data �leopen or close loop with PID parameters Direct graph visualizationCSV �le Software version, firmware version, MREs calibration
CSV data (time o�set, period, amplitude, duration)
open or close loop with PID parametersCSV �le (current, angular speed, PWM signal, error between real and theory signal, gear ratio, MRE positions, time of recording, PID parameters)C++
Formulate, edit, and solve the equations of motion
for the NAO Ankle Kit mechanical system.
Directly command the NAO Ankle Kit with Simulink
SOFTWARES
SENSORS & MOTORS
ELECTRICAL
CONSTRUCTION
SOFTWARE REQUIREMENTS
×4MRE (MAGNETIC ROTARY ENCODER)
ELECTRICAL INPUTPOWER ADAPTOR
SQUID CABLE
DIMENSION (H × D × W)WEIGHT
OS
SYSTEM
MOTOR TYPE
SPEED REDUCTION RATIO
Using hall e�ect sensor technologyPrecision:
24Vdc– Max 1.8A24Vdc/1.8A AC input with UK, EU, US & AUS input plugsConnector cable with female USB, jack connector and male USB
160x160x90mm / 6.3x6.3x3.5inches 560g/1.24lb
Windows 7 / XP, Mac OS X 10.6/10.7 or GNU/Linux Ubuntu 10.01/10.10
1.5GHz CPU / 512 MB RAM / 100 MB free disk space
Brush DC Coreless
12bits / 0.1°
ModelNumberNo load speedStall torqueContinuous torque
AnklepitchAnkleroll
22NT82213P×28300 rpm ±10%68 mNm ±8%16.1mNm max
130.85201.3
AnklePitch[1][B]
AnkleRoll[1][A]
QUANTITY DESCRIPTION×1×1×1×1×1
NAO's ankle - Mechatronics EditionPower adaptor with UK, EU, US, & AUS input plugsSquid connector cableQuick Start GuideDVD with manual, softwares, and resources (CAD �les, component datasheets, electrical schemes…)
PARTS INCLUDED
MECHATRONICS EDITION
ANKLE KIT
ANKLE CONTROLLER
ANKLE CONTROLLER API
MATLAB

18 877.455.9369 | teq.com
M-0339-0413
877.455.9369 | teq.com
© 2013, Tequipment Inc.