motores dc sin escobillas - labc.usb.ve · máquina eléctrica emulen las de un motor dc...
TRANSCRIPT
MOTORES DC SIN ESCOBILLAS
(BRUSHLESS DC MOTORS)
(BLDC)

MOTORES DC SIN ESCOBILLAS
Los llamados "motores DC sin escobillas" ("Brushless DC Motors" o BLDC) son máquinas eléctricas con imán permanente en el rotor
y bobinas en el estator (tres o mas fases), alimentadas con un conjunto de tensiones polifásicas alternas (sinusoidales o
trapezoidales), generadas por medio de un circuito inversor controlado de forma que las características de operación de la
máquina eléctrica emulen las de un motor DC convencional ("motor DC con escobillas") en lo referente a las relaciones
par/corriente y velocidad angular/ voltaje.
En un motor DC de campo generado por imán permanente la estructura de la máquina produce automáticamente la relación
óptima deseada entre el campo del imán del estator y el generado por la corriente de armadura en el bobinado energizado del rotor.
El alineamiento deseado entre los dos campos está definido por la posición de las escobillas que alimentan a los circuitos del rotor
(circuitos de armadura) en relación con los contactos del conmutador y queda fijo en el momento en que se ensambla la
máquina.

Corte de la máquina DC de imán permanete, mostrando el campo de estator producido por el imán permanente.
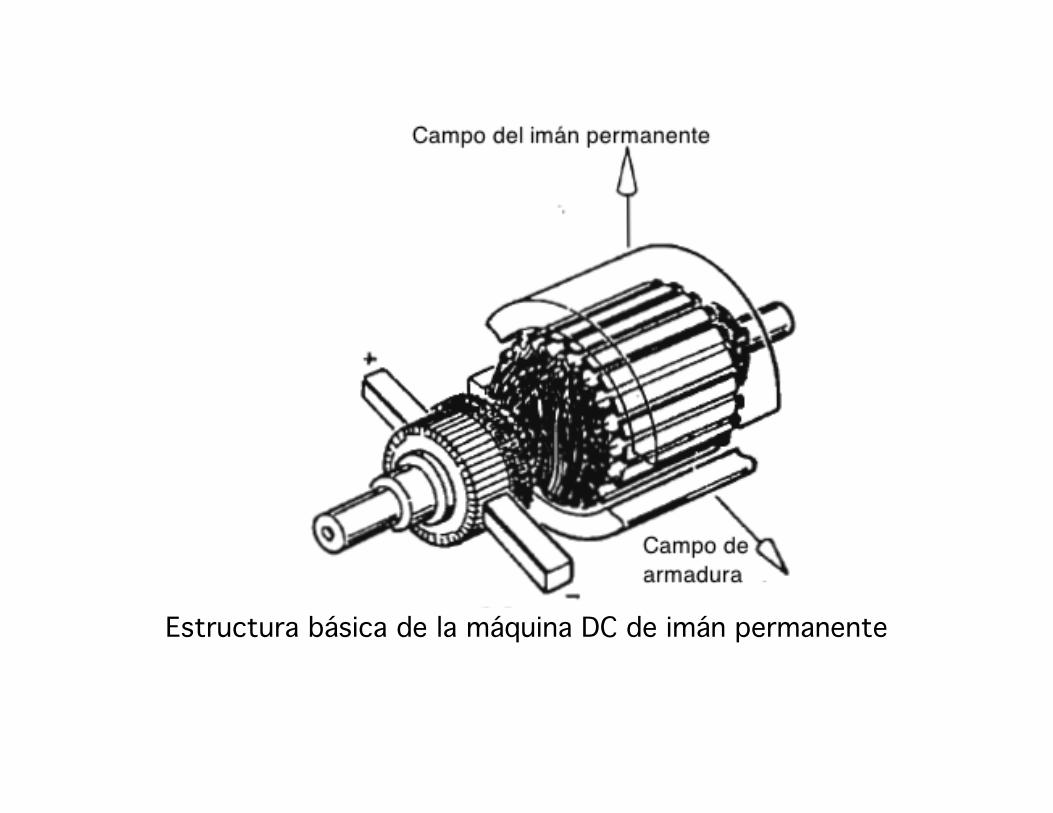
Estructura básica de la máquina DC de imán permanente
La posición de las escobillas asegura que cada bobina de armadura quede energizada solo cuando llega a una posición angular donde
producirá un campo de armadura ortogonal al del estator.
El motor DC con imán permanente en el estator y conmutador mecánico es relativamente fácil de controlar tanto en par como en velocidad y ofrece características de operación casi ideales como
actuador en un servomecanismo.

El uso de un sistema mecánico de conmutación empleado para alimentar en secuencia a las bobinas de armadura tiene las
siguientes desventajas:
1.- La fricción entre las escobillas y las delgas del conmutador produce desgaste; esas piezas (especialmente las escobillas)
deben ser inspeccionadas regularmente y reemplazadas periódicamente.
2.- El contacto eléctrico entre las escobillas y las delgas del conmutador no es ideal y se pueden producir chispas.
3.- La velocidad de giro del rotor está limitada por la necesidad de mantener un contacto adecuado entre las escobillas y las delgas
del conmutador.

Adicionalmente, en una máquina DC convencional ("con escobillas") las pérdidas eléctricas se producen en el circuito de armadura, que esta colocado en el rotor, la parte mas interna y, por lo tanto, la menos ventilada de la máquina, lo que dificulta la disipación del calor generado durante la operación de la máquina
DC convencional.
Desarrollo del concepto "máquina DC sin escobillas" (BLDC).

I.- La máquina síncrona de imán permanente. Esta máquina eléctrica es estructuralmente casi la dual del motor DC de imán permanente: el imán permanente está situado en el rotor, y las bobinas de excitación (usualmente tres o un múltiplo
de tres) están distribuidas en el estator.
En la máquina sincrónica de imán permanente clásica de un solo par de polos (la de bobinado mas simple) las espiras del estator están conectadas formando un sistema de tres bobinas, lo que
produce un circuito trifásico balanceado simétrico, que se alimenta conectándolo a un sistema de alimentación eléctrica trifásica, usualmente formado por las tres fases del sistema eléctrico
nacional.

Esquema equivalente del bobinado de una máquina AC trifásica de un solo par de polos.
a) Localización de los ejes magnéticos de las tres bobinas en el espacio.
b) Circuito eléctrico equivalente, conexión en "Y" sin neutro.

Si las corrientes de fase en cada uno de los tres bobinados de una máquina tienen respectivamente las
magnitudes ia, ib, ic, y el número de conductores es Ns en cada arrollado, las fuerzas magnetomotrices generadas
en cada arrollado serán:
�
F a (t) = Ns
2ia (t)∠0º
�
F b (t) = Ns
2ib (t)∠120º
�
F c (t) = Ns
2ic (t)∠240º

Y la fuerza magnetomotriz resultante en el entrehierro será:
�
F s (t) =
F a (t) +
F b (t) +
F c (t) = ˆ F s∠θs
donde:
�
ˆ F s es la amplitud del vector espacial de fuerza magnetomotriz resultante
�
∠θs es la orientación del vector espacial, referido al eje a
El vector espacial
�
F s (t) representa el valor de la fuerza
magnetomotriz en el entrehierro en el instante t,
�
ˆ F s representa el valor pico de esta distribución y
�
∠θs la posición angular en la que se produce ese valor pico.
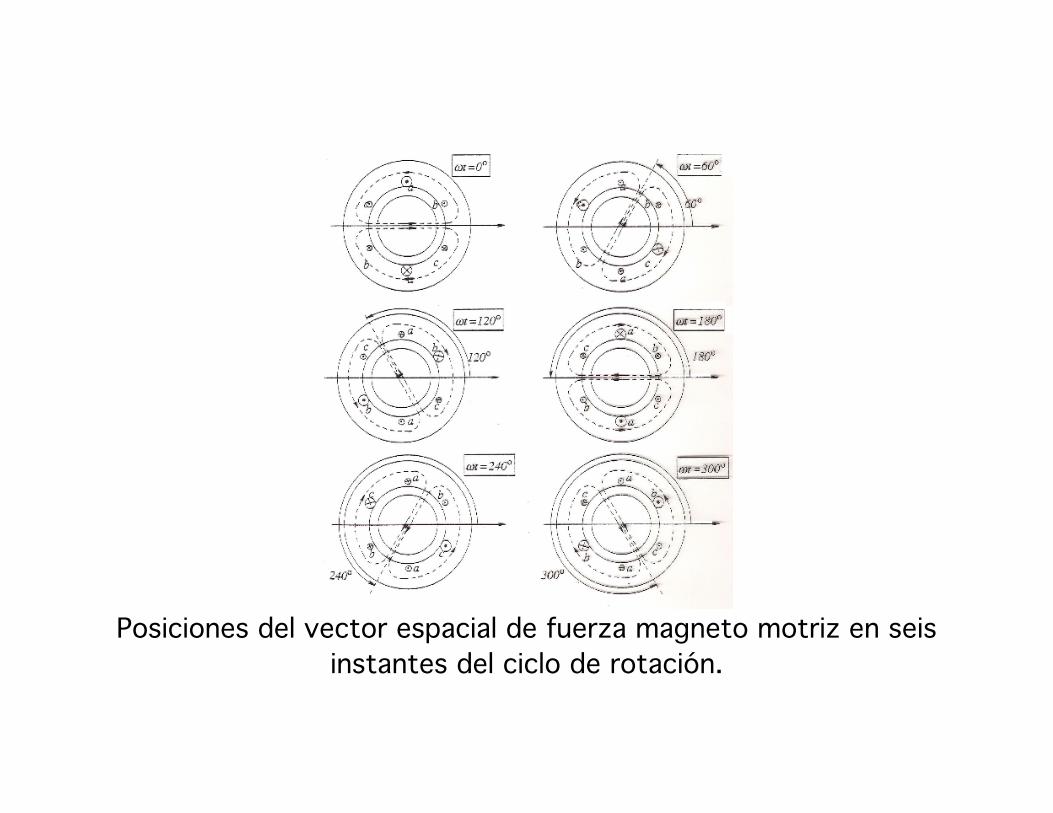
Posiciones del vector espacial de fuerza magneto motriz en seis
instantes del ciclo de rotación.

Este campo interacciona con el del imán permanente, y el rotor se estabiliza (si el par de carga lo permite) girando en sincronismo
con el campo del estator.
En estas condiciones el modelo equivalente unifilar de la máquina es:
Que es el equivalente al modelo circuital de la máquina DC, pero definido en régimen sinusoidal en vez de en régimen DC.

En principio esta máquina supera las deficiencias básicas del motor DC, ya que no tiene conmutador y las pérdidas ocurren ahora en el circuito de estator, que es la parte externa y mas ventilada de la
máquina.
Para usarla como servomotor se requiere de una fuente de alimentación trifásica de amplitud y frecuencia variable, lo que en el pasado, antes del auge de la electrónica de potencia, limitaba
significativamente su aplicación.

II.- La máquina BLDC con sensores de posición integrados.
Esta máquina eléctrica agrega un sistema sensor de la posición del rotor a una máquina eléctrica de estructura similar a la síncrona de
imán permanente.
El sistema sensor puede ser óptico (disco codificado), o magnético, usualmente de tipo "efecto Hall".
Los sensores informan al controlador la posición del rotor en
relación con las bobinas, lo que permite activar un conjunto de conmutadores electrónicos que energizan cada una de las bobinas
en la posición óptima.
El conjunto sensores-controlador-conmutadores electrónicos reemplaza al conmutador electromecánico del motor DC
convencional.
La necesidad de emplear un sistema externo para determinar la secuencia de cionmutación de las fases constituye una diferencia fundamental entre la máquina DC convencional y la máquina BLDC
con sensores de posición.
Un motor DC convencional puede operar "en lazo abierto" (esto es sin control) conectado a cualquier fuente DC que sea capaz de
entregar la corriente necesaria.
La máquina BLDC con sensores de posición no puede operar por si sola. Para girar, incluso en "lazo abierto", es preciso conectar el
sistema externo que interprete las señales de posición y controle al inversor que la alimenta.

Por lo tanto, el diagrama de bloques real de una "máquina BLDC con sensores de posición" es:
El conjunto máquina BLDC con sensores de posición, sistema sensor de posición e inversor es el verdadero "motor BLDC", capaz de operar "en lazo abierto" cuando se conecta a una alimentación
DC de la tensión y potencia necesarias.

Detalles de construcción.
Para reducir las pérdidas en el núcleo, el circuito magnético del estator esta formado por un arreglo de láminas de material
ferromagnético.

De acuerdo con la topología que el diseñador seleccione, el estator puede ser de "polos salientes", o liso.

El número de pares de polos magnéticos en el rotor varía en función de la aplicación a la que se destina el motor BLDC.
En principio, y en igualdad de los otros factores, a mayor número de polos mayor es el par que se puede producir, pero menor es la
velocidad máxima que se puede alcanzar.
Como el campo magnético en el rotor es básicamente constante,
el núcleo del rotor puede ser una pieza sólida, no laminada.

El número de bobinas es usualmente tres (BLDC trifásico), pero es posible encontrar motores con mayor número de fases.
Circuito equivalente y circuito actuador de una máquina BLDC
pentafásica. En principio a mayor número de fases menores las oscilaciones de
par, pero mayor complejidad y costo del circuito actuador.
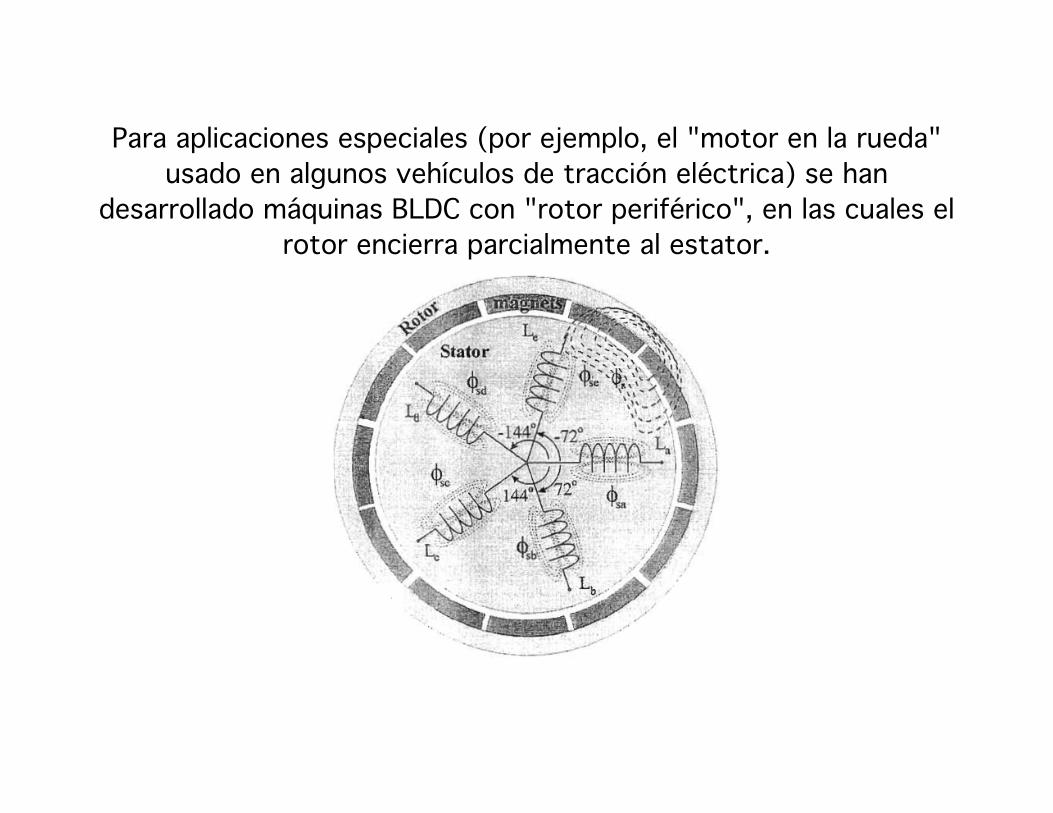
Para aplicaciones especiales (por ejemplo, el "motor en la rueda" usado en algunos vehículos de tracción eléctrica) se han
desarrollado máquinas BLDC con "rotor periférico", en las cuales el rotor encierra parcialmente al estator.

Principios de operación de la máquina BLDC con sensores de posición.
La figura muestra el corte de un BLDC trifásico con un par de polos en el
rotor, con dos ranuras y dos arrollados por cada fase del estator. (a1 en serie con a2; b1 en serie con b2, c1 en serie con c2).

Las bobinas están distribuidas simétricamente en el estator, todas las bobinas tienen el mismo número de vueltas y el intervalo entre
ranuras es de 30º.
Idealmente cada fase del estator debería ser energizada por separado, y además debería ser posible energizarla tanto con
tensión positica como negativa.

Para energizar en forma independiente cada fase con cualquiera de las dos polaridades sería preciso disponer de un BLDC con acceso
independiente a las tres parejas de terminales de las fases, alimentado con dos semi-puentes trifásicos.

En la práctica por razones de economía y de estándarización no se dispone de máquinas BLDC con bobinas totalmente independientes y la alimentación se realiza conectando las tres fases a un inversor
medio-puente trifásico.
Esta conexión introduce una primera limitación, porque con ella no
es posible energizar cada fase por separado.
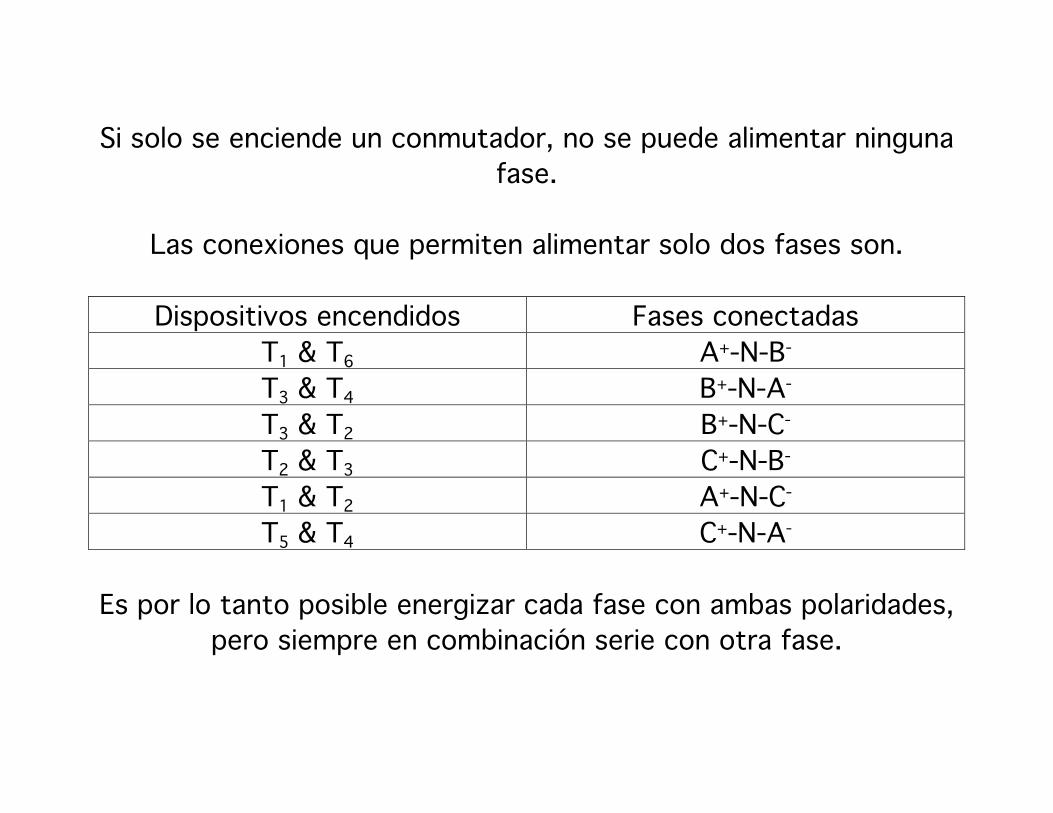
Si solo se enciende un conmutador, no se puede alimentar ninguna fase.
Las conexiones que permiten alimentar solo dos fases son.
Dispositivos encendidos Fases conectadas
T1 & T6 A+-N-B- T3 & T4 B+-N-A- T3 & T2 B+-N-C- T2 & T3 C+-N-B- T1 & T2 A+-N-C- T5 & T4 C+-N-A-
Es por lo tanto posible energizar cada fase con ambas polaridades,
pero siempre en combinación serie con otra fase.

En principio es posible operar también con la máquina BLDC si las fases están conectadas en delta; en este caso también es posible alimentar cada fase con corriente de las dos polaridades, pero con
la complicación adicional de que ahora en cada conexión se energizan las tres fases, una individual en paralelo con las otras
dos conectadas en serie.

Operaciones requeridas para lograr un giro completo.
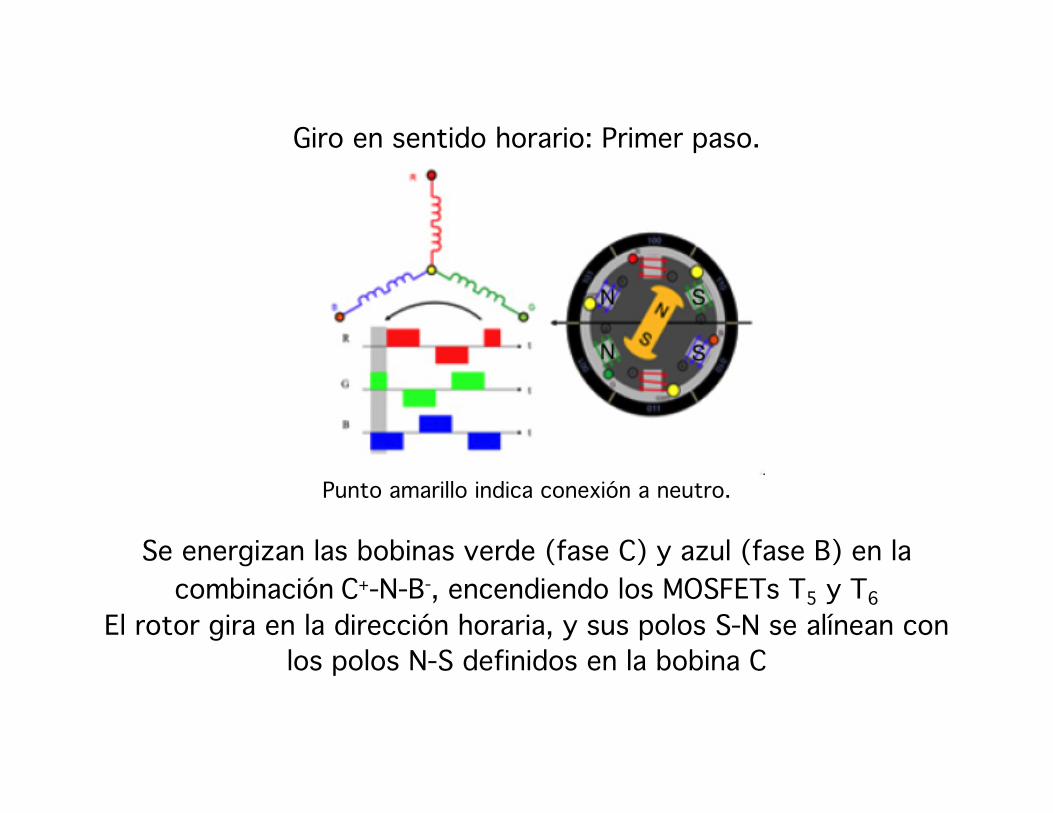
Giro en sentido horario: Primer paso.
Punto amarillo indica conexión a neutro.
Se energizan las bobinas verde (fase C) y azul (fase B) en la
combinación C+-N-B-, encendiendo los MOSFETs T5 y T6
El rotor gira en la dirección horaria, y sus polos S-N se alínean con los polos N-S definidos en la bobina C
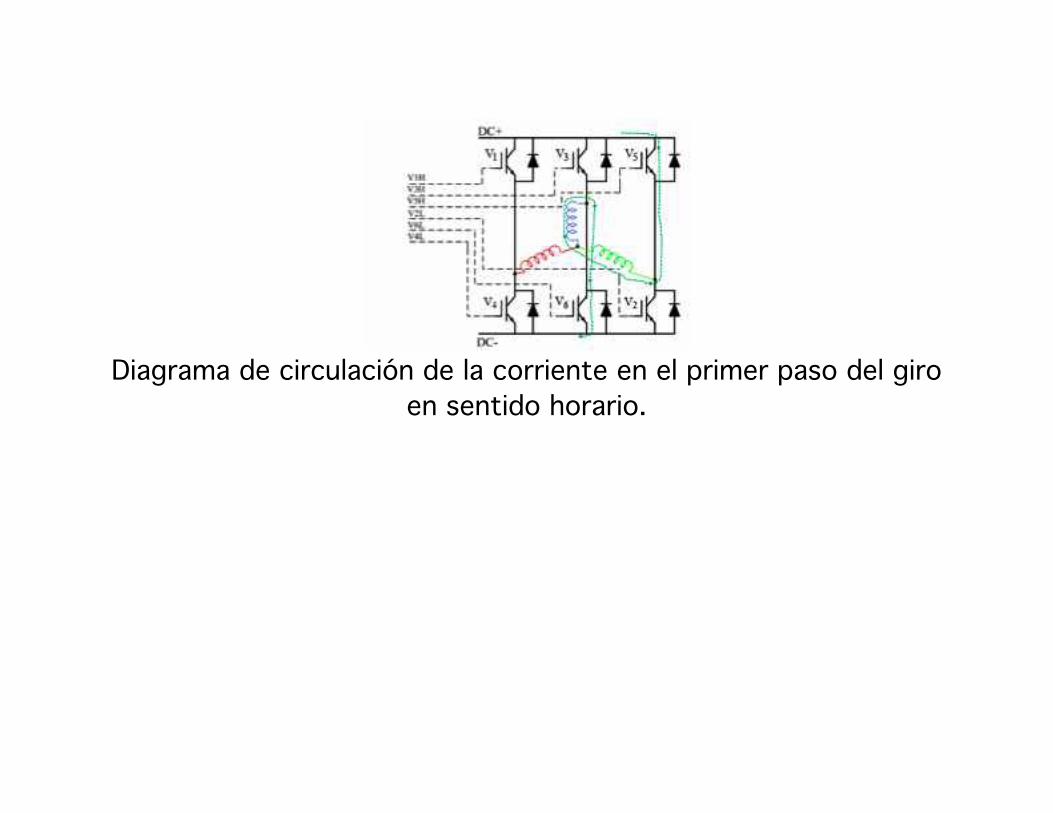
Diagrama de circulación de la corriente en el primer paso del giro
en sentido horario.
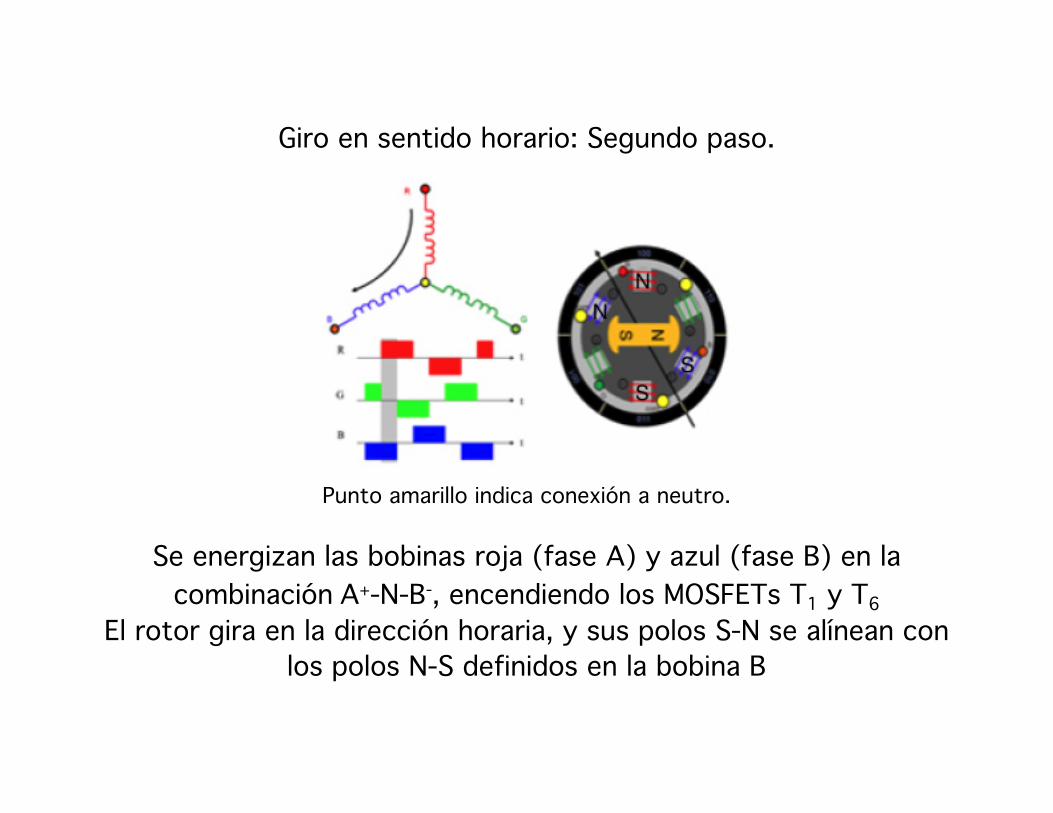
Giro en sentido horario: Segundo paso.
Punto amarillo indica conexión a neutro.
Se energizan las bobinas roja (fase A) y azul (fase B) en la
combinación A+-N-B-, encendiendo los MOSFETs T1 y T6
El rotor gira en la dirección horaria, y sus polos S-N se alínean con los polos N-S definidos en la bobina B
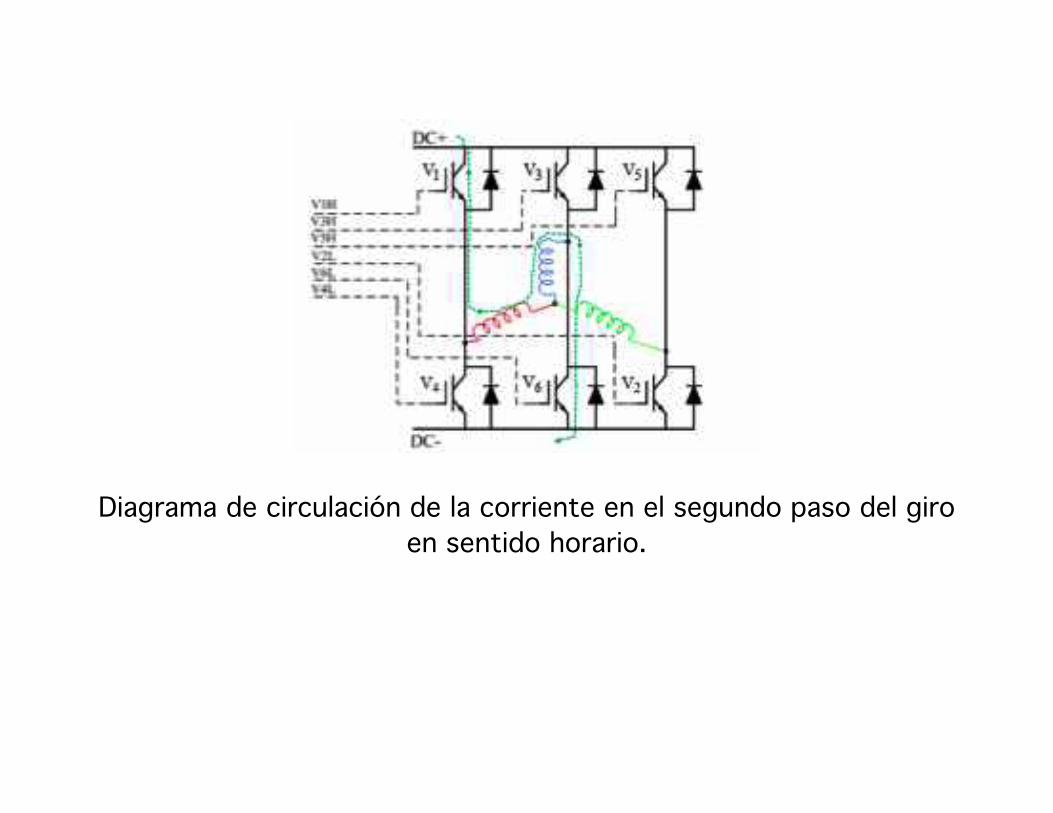
Diagrama de circulación de la corriente en el segundo paso del giro en sentido horario.

Giro en sentido horario: Tercer paso.
Punto amarillo indica conexión a neutro.
Se energizan las bobinas roja (fase A) y verde (fase C) en la
combinación A+-N-C-, encendiendo los MOSFETs T1 y T2
El rotor gira en la dirección horaria, y sus polos S-N se alínean con los polos N-S definidos en la bobina A

Giro en sentido horario: Cuarto paso.
Punto amarillo indica conexión a neutro.
Se energizan las bobinas azul (fase B) y verde (fase C) en la
combinación B+-N-C-, encendiendo los MOSFETs T3 y T2
El rotor gira en la dirección horaria, y sus polos S-N se alínean con los polos N-S definidos en la bobina C

Giro en sentido horario: Quinto paso.
Punto amarillo indica conexión a neutro.
Se energizan las bobinas azul (fase B) y roja (fase A) en la
combinación B+-N-A-, encendiendo los MOSFETs T3 y T4
El rotor gira en la dirección horaria, y sus polos S-N se alínean con los polos N-S definidos en la bobina B
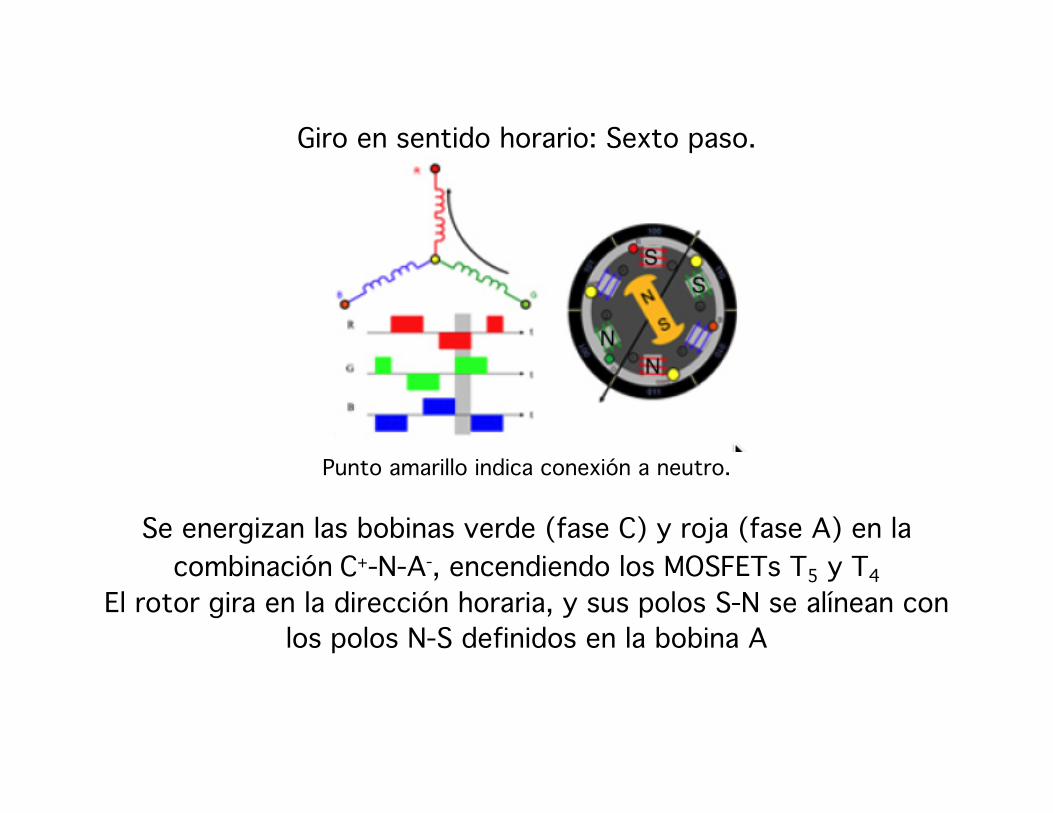
Giro en sentido horario: Sexto paso.
Punto amarillo indica conexión a neutro.
Se energizan las bobinas verde (fase C) y roja (fase A) en la
combinación C+-N-A-, encendiendo los MOSFETs T5 y T4
El rotor gira en la dirección horaria, y sus polos S-N se alínean con los polos N-S definidos en la bobina A

Esta secuencia de pasos se debe mantener indefinidamente, repitiéndose una vez en cada vuelta mientras se desee que la
máquina BLDC gire en el sentido horario.
Para que la máquina gire en sentido anti-horario la secuencia de pasos debe recorrerse en orden inverso.
El cambio de un estado al siguiente en la secuencia se produce
cuando lo indique el sensor de posición.
La frecuencia básica de conmutación es variable, e igual a 6 veces la frecuencia de giro del rotor.
Falta por definir la relación entre la información proporcionada por el sistema de detección de posición y la secuencia de encendido
de los MOSFETs.
Dado que el ciclo está formado por seis estados, es preciso que la información de posición tenga tres bits.
En la generalidad de los casos las señales de posición del rotor son
producidas por una arreglo de sensores de efecto Hall.
Para la configuración básica, con tres fases y un par de polos magnéticos en el rotor, las configuraciones mas usuales emplean
tres sensores Hall.
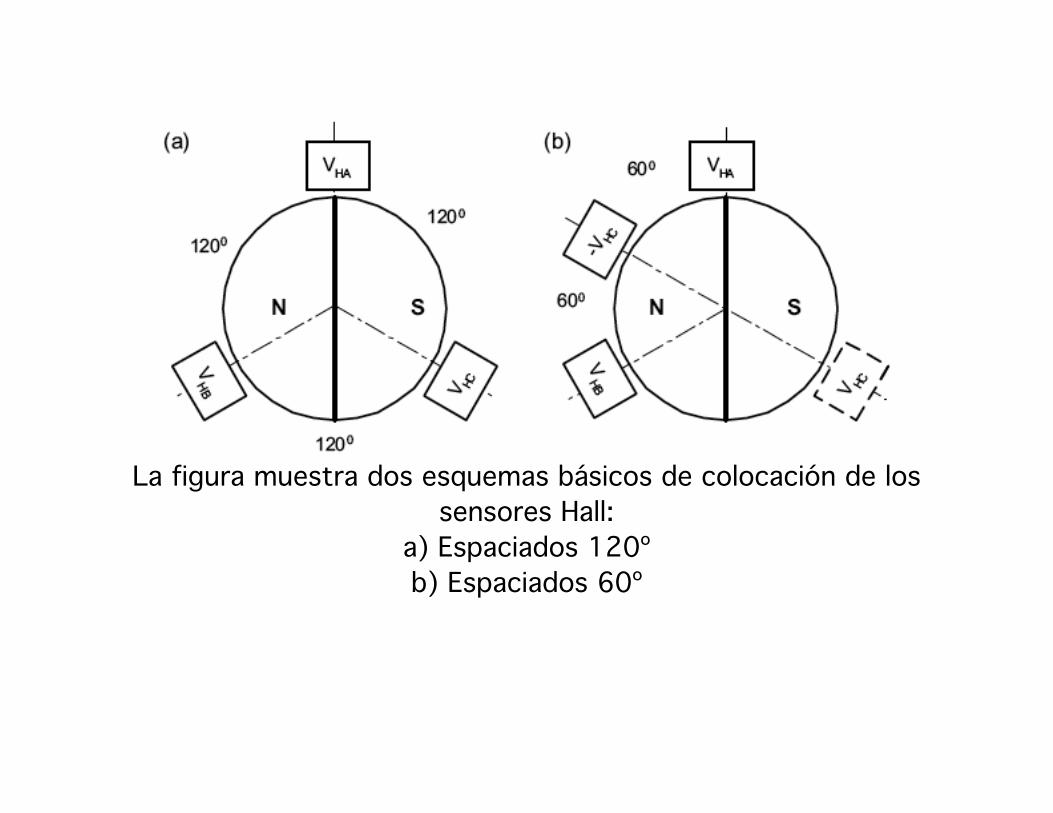
La figura muestra dos esquemas básicos de colocación de los
sensores Hall: a) Espaciados 120º b) Espaciados 60º

Cada sensor produce un nivel positivo mientras el polo norte está enfrente del sensor, y un nivel negativo cuando es el polo sur.
Las salidas son:

Una posible implementación, para generar las señales de disparo de los conmutadores del puente inversor con un arreglo de sensores
desfasados 120º es la diguiente
Salida del sistema de detección posición MOSFETs "ON" 0 0 1 T5 y T6 0 1 1 T1 y T6 0 1 0 T1 y T2 1 1 0 T3 y T2 1 0 0 T3 y T4 1 0 1 T5 y T4

La posición de arranque del motor puede corresponder a cualquiera de los seis estados posibles; para girar en la dirección horaria la secuencia de estados en la tabla de conmutaciones se debe leer "hacia abajo" desde la posición inicial, y para girar en sentido anti-horario se debe leer "hacia arriba". La operación es por supuesto cíclica: al llegar a un extremo de la tabla se debe saltar al otro extremo para realizar la siguiente conmutación.
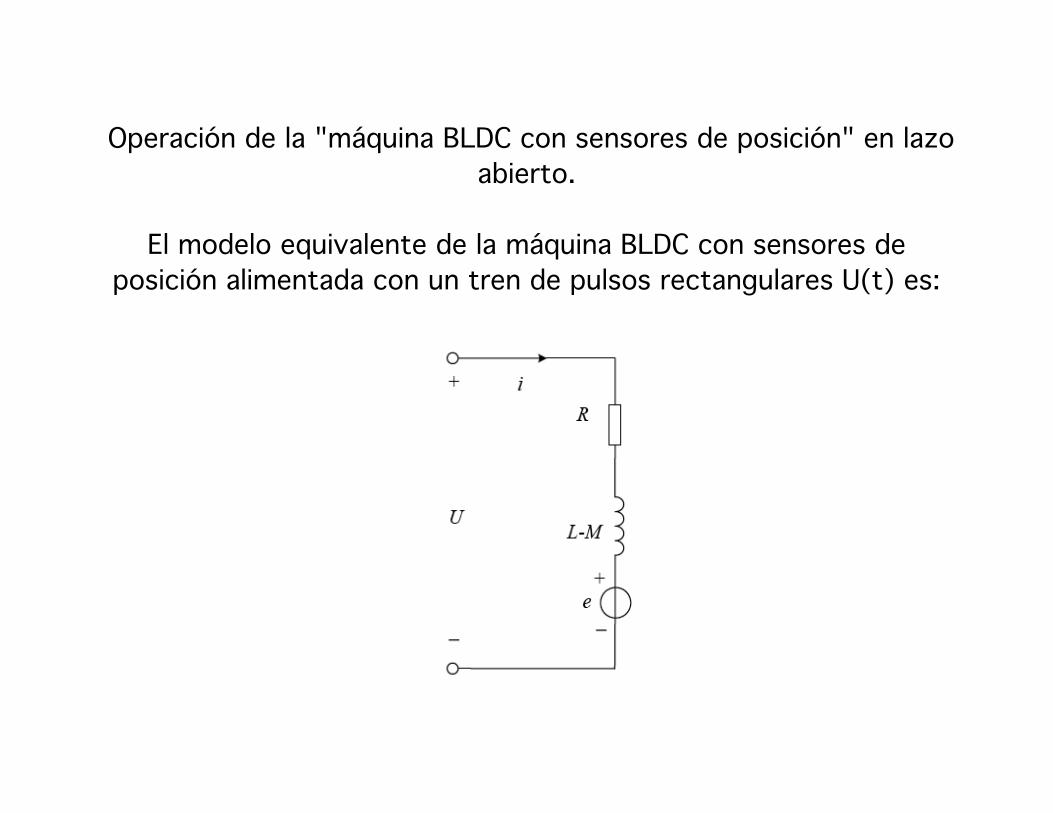
Operación de la "máquina BLDC con sensores de posición" en lazo abierto.
El modelo equivalente de la máquina BLDC con sensores de
posición alimentada con un tren de pulsos rectangulares U(t) es:
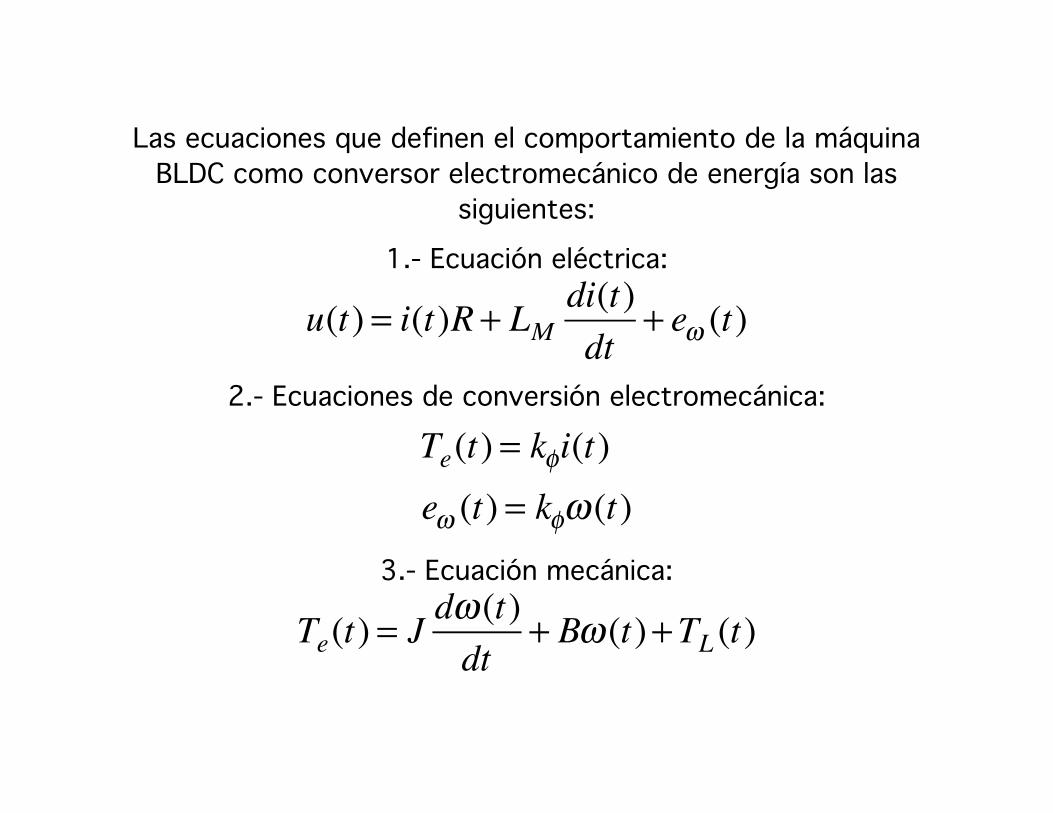
Las ecuaciones que definen el comportamiento de la máquina BLDC como conversor electromecánico de energía son las
siguientes:
1.- Ecuación eléctrica:
u(t) = i(t)R + LMdi(t)dt
+ eω (t)
2.- Ecuaciones de conversión electromecánica:
Te(t) = kφi(t)eω (t) = kφω (t)
3.- Ecuación mecánica:
Te(t) = Jdω (t)dt
+ Bω (t)+TL (t)

En estas condiciones, si se alimenta el puente inversor y la máquina opera como motor en lazo abierto, esto es, sin un control adicional de par, velocidad o posición, ω aumentará hasta que se
llegue a estabilizar en la velocidad de equlibrio, ω eq, dada por:
Te ωeq = Bω eq +TL ωeq
Si el motor no esta conectado a una carga mecánica (TL=0), la velocidad de equilibrio que se alcanza es la velocidad sin carga,
que es la máxima que se puede alcanzar operando en condiciones de tensión de alimentación nominal.

El comportamiento en lazo abierto de la "máquina BLDC con sensores de posición" operando como motor queda definido por
las siguientes curvas:

Operación de la "máquina BLDC con sensores de posición" en lazo cerrado.
En general una aplicación mecatrónica requiere que se controlen
las variables aceleración, velocidad y posición (o alguna combinación de estas), para lo cual es preciso controlar el par
generado por motor.
El par se controla en base a la corriente de fase, la cual a su vez se controla regulando la tensión aplicada a las bobinas, mediante una
modulación de ancho de pulso (PWM) de la tensión de entrada.

Existen dos formas generales de realizar el control PWM de la tensión aplicada.
1.- Control de la tensión DC de alimentación al puente inversor.

Control de la tensión de entrada al inversor con regulador PWM
tipo "conversor reductor", mono-direccional en el flujo de energía.
Esta configuración requiere una etapa conmutadora adicional, para realizar la modulación, lo que incrementa los costos y, casi con
seguridad, las pérdidas de conmutación, pero minimiza el número de conmutaciones que deben realizar los conmutadores del
puente, y puede ser adecuada para aplicaciones de alta potencia.
El puente inversor es totalmente bidireccional en lo que respecta al flujo de energía, por lo que permite el frenado dinámico
regenerativo; si se desea esta opción en esta configuración, la etapa reguladora de la tensión DC de entrada al puente debe
también ser bidireccional.

2.- Control PWM directo en el puente inversor.
Esta configuración no requiere componentes adicionales, pero por lo menos la mitad de los conmutadores del puente deben de ser
capaces de operar con altas frecuencias de conmutación. Usualmente la señal PWM se aplica solo a los tres conmutadores
superiores (T1, T3, T5)

Señales de control aplicadas a los conmutadores del puente inversor para realizar el control de corriente en el BLDC.
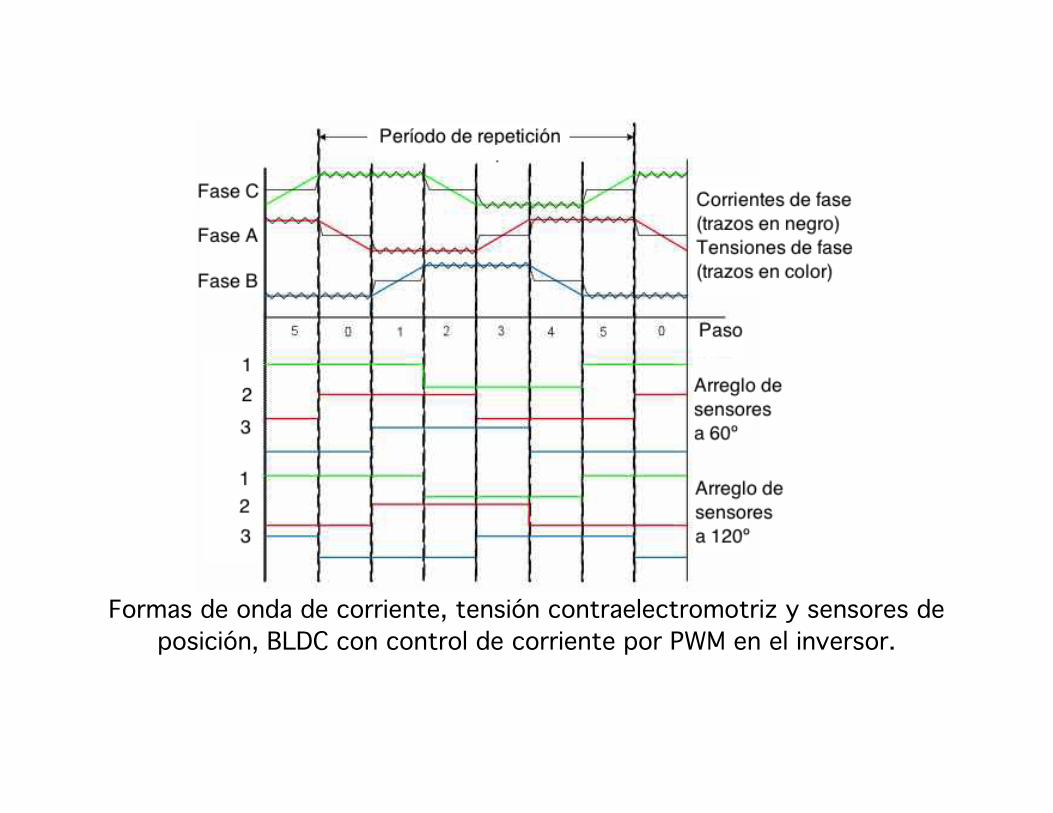
Formas de onda de corriente, tensión contraelectromotriz y sensores de
posición, BLDC con control de corriente por PWM en el inversor.

III.- Operación "sin sensores".
Los sensores de posición proporcionan la información necesaria para que opere la máquina BLDC, pero a su vez representan un
factor adicional de costo, y un posible punto devil en el sistema, ya que si fallan, o se interrumpen los cables que llevan las señales
al controlador es imposible la operación de la máquina. Adicionalmente, los sensores Hall tienen una temperatura límite de operación inferior al del resto del los componentes de la máquina, los sensores ocupan espacio y, en las máquinas de baja potencia,
el consumo de energía de los sensores reduce significativamente la efeciencia del actuador.

Para eliminar estos problemas se están proponiendo soluciones "sin sensores" (sensor-less) que buscan extraer la información
necesaria para determinar la posición del rotor en base la la contenida en las señales eléctricas del motor, medidas
directamente en el inversor.
Esto reduce el cableado entre el controlador electrónico y la máquina BLDC al mínimo indispensable (los tres cables de la alimentación), reduce el volumen y el peso de la máquina y permite que opere en ambientes de mayor temperatura.

Hasta la fecha se han propuesto los siguientes métodos para determinar indirectamente la posición del rotor en la máquina
BLDC:
1.- Detectando el cruce por cero de la fuerza contra-electromotríz inducida en la fase que no está energizada.
2.- Detectando la tercera harmónica de la fuerza contra-electromotríz inducida en la fase que no está energizada.
3.- Detectando las variaciones del valor de la inductancia en las fases.
Los dos primeros métodos se han aplicado a las máquinas BLDC con alimentación trapezoidal, los dos últimos se han aplicado a las
máquina BLDC sincrónicas o con alimentación sinusoidal en las todas las fases.

Detección del cruce por cero de la tensión contra-electromotriz den la fase no energizada.
Cuando la fase se des-energiza su nivel empieza a cambiar. El valor cruza por cero en la mitad del intervalo no energizado.
El cambio al nuevo estado debe producirse medio ciclo después del
cruce por cero. Este tiempo es, por supuesto, función de la frecuencia a la cual se está operando.

Dado que las bobinas de la máquina están conectadas en "Y" sin acceso al neutro no es posible medir directamente una tensión fase-neutro. Solo se pueden medir tensiones fase-fase, lo que
requiere una manipulación adicional de las señales.

Suponiendo que la fase abierta es la A, se pueden realizar dos medidas:
vAB(t) = vAN (t)+ vNB(t)
vAC (t) = vAN (t)+ vNC (t)
Si además suponemos que las tres alimentaciones y las tres fases
son idénticas, se debe cumplir en todo caso:
vNB(t) = −vNC (t)

Por lo tanto:
vAB(t)+ vAC (t) = vAN (t)+ vNB(t)+ vAN (t)+ vNC (t)
vAB(t)+ vAC (t) = vAN (t)+ vNB(t)+ vAN (t)− vNB(t)
vAB(t)+ vAC (t) = 2vAN (t)
Esta señal tiene el mismo cruce por cero que la señal inicial, vAN(t).
Por supuesto estas ecuaciones son ideales; en la práctica siempre existirá ruido, incluyendo el generado por las conmutaciones del
inversor, y existirán diferencias en las tensiones aplicadas en cada fase, debidas a las diferencias entre los componentes del puente, y
entre las fases del motor.
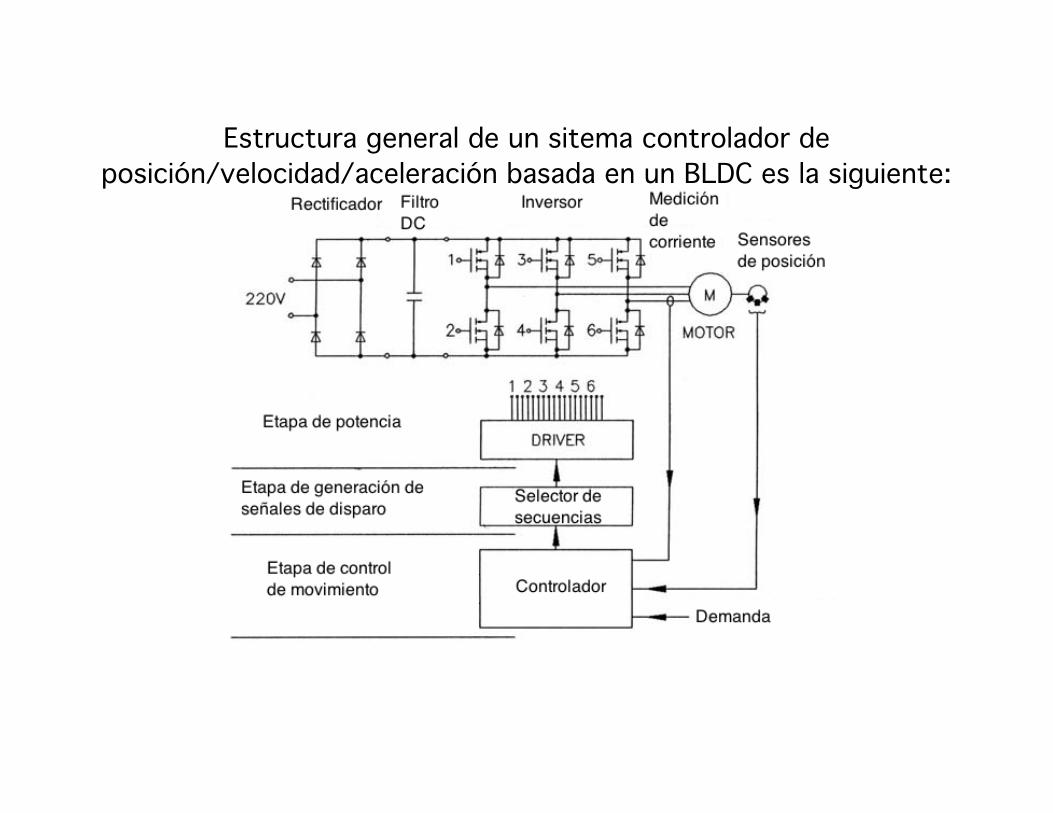
Estructura general de un sitema controlador de posición/velocidad/aceleración basada en un BLDC es la siguiente:
En muchas aplicaciones la operación en lazo abierto es suficiente, y en este caso la tendencia general es emplear un circuito
integrado especializado.
Hay un número de estos componentes disponibles en el mercado; un representante típico de este tipo de I.C. es el MC33035
