modeling technique for the efficient design of microwave
TRANSCRIPT

HAL Id: tel-01421150https://hal.archives-ouvertes.fr/tel-01421150
Submitted on 21 Dec 2016
HAL is a multi-disciplinary open accessarchive for the deposit and dissemination of sci-entific research documents, whether they are pub-lished or not. The documents may come fromteaching and research institutions in France orabroad, or from public or private research centers.
L’archive ouverte pluridisciplinaire HAL, estdestinée au dépôt et à la diffusion de documentsscientifiques de niveau recherche, publiés ou non,émanant des établissements d’enseignement et derecherche français ou étrangers, des laboratoirespublics ou privés.
Modeling technique for the efficient design of microwavebandpass filtersMatthias Caenepeel
To cite this version:Matthias Caenepeel. Modeling technique for the efficient design of microwave bandpass filters. Engi-neering Sciences [physics]. INRIA Sophia Antipolis - Méditerranée; Vrije Universiteit Brussels, 2016.English. tel-01421150

UNIVERSITE DE NICE-SOPHIA ANTIPOLIS
ECOLE DOCTORALE STIC SCIENCES ET TECHNOLOGIES DE L’INFORMATION ET DE LA COMMUNICATION
T H E S E
pour l’obtention du grade de
Docteur en Sciences
de l’Université de Nice-Sophia Antipolis
présentée et soutenue par
AUTEUR Matthias CAENEPEEL Modeling technique for the efficient design of microwave bandpass
filters
Thèse dirigée par Yves ROLAIN et Martine Olivi
soutenue le 19 Octobre 2016 Jury : G. Macciarella Professeur Rapporteur A. Alvarez-Melcón Professeur Rapporteur A. Pérrigaud Ingénieur de recherche Examinateur F. Ferranti Professeur Examinateur A. Hubin Professeur Examinateur R. Vounck Professeur Examinateur Y. Rolain Professeur Directeur de thèse M. Olivi Chargée de recherche Directeur de thèse F. Seyfert Chargé de recherche Co-directeur de thèse

Vrije Universiteit Brussel (VUB) Faculty of engineering (IR)
Department of fundamental electricity and instrumentation (ELEC)
INRIA (Université Nice Sophia Antipolis) Team APICS: Analysis and problems of inverse type in control and signal processing
MODELING TECHNIQUES FOR THE EFFICIENT DESIGN
OF MICROWAVE BANDPASS FILTERS
Thesis submitted in fulfilment of the requirements for the award of the degree of Doctor in Engineering Sciences (Doctor in de ingenieurswetenschappen) by
Matthias Caenepeel
October 2016
Advisors: Prof. dr. ir. Yves Rolain Martine Olivi Chargée de recherche Fabien Seyfert Chargé de recherche

Members of the jury
Prof. dr. ir. Yves Rolain (advisor)
Vrije Universiteit Brussel
Chargee de recherche Martine Olivi (advisor)
INRIA
Charge de recherche Fabien Seyfert (advisor)
INRIA
Prof. dr. ir. Annick Hubin (chairman)
Vrije Universiteit Brussel
Prof. dr. Roger Vounckx (vice-chairman)
Vrije Universiteit Brussel
Prof. dr. ir. Alejandro Alvarez-Melcon (rapporteur)
Universidad Politecnica De Cartagena, Spain
Prof. dr. ir. Giuseppe Macchiarella (rapporteur)
Politecnico di Milano, Italy
Prof. dr. ir. Francesco Ferranti (secretary)
Vrije Universiteit Brussel
dr. ir. Aurelien Perigaud
XLIM, France
i

ii

Acknowledgements
During the last four years I’ve had the opportunity to do a joint PhD between the
ELEC department of the VUB and the APICS team of INRIA Sophia-Antipolis.
This experience broadened my vision on science, engineering and life in general.
I want to thank all of the people that made this possible and supported me
during this unforgettable experience.
First of all I would like to thank Yves Rolain, Martine Olivi and Fabien Seyfert
for their guidance and for giving me the opportunity to do this PhD.
Yves, first of all I would like to thank you for believing in me as a PhD candidate.
By pushing me out of my comfort zone, you have helped me to develop several
skills. Your enthusiastic way of teaching has taught me the importance of a
well-structured yet vivid presentation. I also want to thank you for correcting
my writings. Although the result of these corrections was not always pleasant,
it has drastically improved my writing skills. Finally I would like to thank you
for the all the interesting discussions we had during the last five years, not only
on technical subjects but also on other topics. I am proud to say that I have
been one of your PhD students.
Martine, first of all thank you for helping me set up this joint PhD. I also highly
appreciated your patience when you were explaining me various mathematical
concepts and helping me with proofs. I would also like to thank you for always
thoroughly reading my writings. Your eye for detail is truly remarkable. Finally
I want to thank you for always helping me to put things into perspective when
I thought everything was going in the wrong direction.
Fabien, thank you for all of the hours you have invested in discussing about and
explaining me the coupling matrix theory. Thank you for the late evenings you
spent with me at INRIA and for the Skype meetings to figure out the errors in my
work. Although I lacked the energy to figure out an important error at the end
iii

of my thesis, I am really glad you have pushed me to do so. Moreover you have
convinced me that scientific results are more important than writing astronomic
amounts of papers. Your view on life, critical attitude towards results and sense
of humor have truly inspired me.
Next, I would like to thank Annick Hubin, Roger Vounckx, Francesco Ferranti,
Aurelien Perigaud, Giuseppe Macchiarella and Alejandro Alvarez-Melcon for
being a member of the jury of my thesis. Your comments, questions and expertise
allowed me to drastically improve the quality of this work.
Also I would like to thank both of the research teams APICS and ELEC for
providing a pleasant environment and all the necessary means to be able to
do my research. I would especially like to thank Ann Pintelon, Johan Pattyn,
Stephanie Sorres and Sven Reyniers for all of their administrative and technical
support.
During my PhD I have also learned the value of collegiality and friendship. I
was very lucky to share an office with Hannes, Adam and Egon at ELEC.
Hannes, you are a true friend to whom I can talk about literally every aspect of
my life. Thank you for all the support, advice and good times we had. I strongly
value your opinion. Your view on things has helped me clear my mind several
times. Moreover our trip the USA was one of the best experiences of my life. I
am really going to miss seeing you on a daily basis.
Adam, working on a project or traveling together with you always has brought
us closer as friends. Thank you for solving all those questions I was struggling
with. I truly hope that our professional paths will cross again in the future. But
for now I wish you all the best as a new member of the APICS team.
Egon, I am glad that we did not only share an office but that we also worked
together on the ping-pong tower project. You are one of the most helpful people
I know. I would specifically like to thank you for all of the times you helped me
with computer related issues.
I would also like to thank Maral and Evi for working together with me on
microwave filters. Maral, due to the topic of your master thesis, you pushed this
work in the direction of the coupling matrix theory. This would not have been
the same work if it wasn’t for you.
I would also like to thank Francesco and Krishnan for working with me on
incorporating metamodels in filter design. Francesco, I thank you for sharing
your expertise with me. It was a real pleasure to work with you.
iv

I would also like to thank Piet, Ebrahim, Dries, John, Anna, Maarten, Jan,
Alexander, Cedric, Koen, Philippe, Rik, Gerd and Leo for being such nice col-
leagues. Thank you for all of the nice chats and laughter during several lunches,
coffee breaks and beer Fridays. I would specifically like to thank Piet for all the
extra good times he offered me during our daily lifting sessions.
I would also like to thank Glenn and Philemon for living with me during the
first two years of this PhD. Thanks for all whisky tastings, balcony discussions
and crazy times we had in our little palace.
I was very lucky to be part of such warm and pleasant research group at INRIA.
Dmitry, although I called you Vladimir during my first week at INRIA, I will
always remember your name. Your presence made my visits to APICS even
more pleasant. I am also very proud to be a part of the Porco Rosso team:
Christos, Stephano, Konstaninos and Dmitry. I would like to thank you all for
your support, good times and nice food we had together. And a special thanks
for the moral support when my computer crashed while I was writing this thesis.
I would also like to thank David for all the discussions about our works in order
to improve them both. Finally I also want to thank Juliette, Sylvain and Laurent
for the warm welcoming every time I visited.
At the VUB in general, I have always been surrounded by lovely people: Hannes,
Philemon, Glenn, Maarten, Adam, Lara, Petey, Ken, Jens, Hans, Simen and
Aushim. Thank you for all the parties, concerts and crazy nights we had to-
gether. May more of these good times follow in the future!
Another very important person during me PhD is my brother, Free. Having a
beer or a run together always gave me the right energy to push me further into
my research or putting things into perspective when I was having a hard time.
Thank you for your support and I hope I am able to do the same for you.
There are no words to express my love and gratitude towards Evy. Thank you
for always being there for me. I highly appreciate your open mind towards my
long stays in France. I would also like to thank you for your contributions to
the visual aspects of my work in general. Without you, the layout of this thesis
would simply have been ugly. Finally I want to thank you for your patience,
especially during the last days of the writing period. Evy, thank you for all of
the help, support, freedom and love you have been given me during this PhD.
v

Finally I want to thank my parents for all of the opportunities and the beautiful
youth they have given me. Papa, sending me to the VUB is one of the best
things that ever happened to me. Mama, it is impossible to list up all of the
amazing things you have done for me over the last 27 years.
Therefore I would like to dedicate this work to my parents.
Matthias Caenepeel
Antibes and Brussels, October 2016
vi

Abstract
The design of microwave bandpass filter generally requires optimization or fine-
tuning of the physical design parameters in order to meet the electrical spec-
ifications given by a frequency template. In this thesis we develop models to
assist the designer in the time-efficient physical design of the distributed ele-
ment microwave filters. The aim is to incorporate these models in different
computer-aided design (CAD) methods. By a time-efficient design, we mean
a design that requires a low number of electromagnetic (EM) simulations. The
EM-simulations typically represent the most time-consuming step during the op-
timization process. We propose different modeling approaches for the frequency
response behavior of the filter. The first approach models the coupling matrix
as a function of the physical design parameters and the second approach models
the scattering (S-) parameters, again as a function of the physical parameters.
In the first part of the text we focus on the design of narrow-band microwave
bandpass filters implemented in a microstrip technology. The design of such
filters is often based on the coupling matrix theory. It models the distributed
element microwave filter by a lumped element circuit consisting of coupled LC-
resonators that resonate in the vicinity of its center frequency. The behavior of
these coupled resonator circuits is represented by a coupling matrix. The first
step of the design process synthesizes a coupling matrix (golden goal) realizing a
filter function that fulfills the frequency specifications. Next this coupling matrix
is physically implemented by correctly dimensioning the design parameters of
the actual microwave filter. Over the last few years several computer-aided
tuning (CAT) methods have been developed to optimize the physical design
parameters. These tuning methods often extract a coupling matrix from the
filters S-parameters and compare it to the golden goal. The extraction of the
coupling matrix is critical, especially in the case of coupling topologies that allow
multiple solutions.
vii

Therefore we have developed a coupling matrix extraction procedure that identi-
fies the physically implemented coupling matrix. Moreover we introduce a novel
CAT technique based on an efficient estimation of the Jacobian of the func-
tion relating the design parameters to the (physical) coupling parameters. The
estimation of the Jacobian uses adjoint sensitivity analysis , which drastically
reduces the number of required EM-simulations. This novel technique has been
applied to design examples having multiple-solution coupling topologies.
In the second part of the thesis we propose an alternative modeling approach
which is a based on the concept of a metamodel. The idea is that the metamodel
is numerically much cheaper to evaluate than the original simulation model
while keeping an acceptable accuracy. First we use the metamodel approach to
efficiently generate initial values for the filters’ physical design parameters. Next
we will use metamodels to optimize the S-parameters. The use of metamodels
reduces the time required to optimize the filters heavily. Moreover metamodels
can be used to optimize for different design scenarios.
viii

Contents
Members of the jury i
Acknowledgements iii
Abstract vii
Contents xi
List of symbols xiii
1 Introduction 1
I Coupling Matrix Approach 7
2 Narrow-band Bandpass Filter Design based on Coupling Matrix Theory 9
2.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.2 Rational Form of the Scattering Parameters . . . . . . . . . . . . 11
2.3 The Pseudo-elliptical Filter Function . . . . . . . . . . . . . . . . 16
2.4 Equivalent Lumped Bandpass Network . . . . . . . . . . . . . . . 21
2.5 Equivalent Lumped Lowpass Network . . . . . . . . . . . . . . . 23
2.6 Coupling Matrix Representation . . . . . . . . . . . . . . . . . . 28
2.7 Synthesis of the Coupling Matrix . . . . . . . . . . . . . . . . . . 36
2.8 Reconfiguration of the Coupling Matrix . . . . . . . . . . . . . . 44
3 Physical Implementation of the Coupling Matrix in Microstrip Technology 51
3.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
3.2 Microstrip Structure . . . . . . . . . . . . . . . . . . . . . . . . . 53
3.3 Half-Wavelength (λ2 ) Resonators . . . . . . . . . . . . . . . . . . 56
3.4 Electromagnetic (EM-) Simulators . . . . . . . . . . . . . . . . . 58
3.5 Generation of the Design Curves . . . . . . . . . . . . . . . . . . 59
3.6 Initial Dimensioning of a Single Quadruplet SOLR Filter . . . . . 70
3.7 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
ix

4 Extraction of the Coupling Matrix 75
4.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
4.2 Bandpass-to-Lowpass Transformation . . . . . . . . . . . . . . . 79
4.3 Rational Approximation and Reference Plane Adjustment of the
S-parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
4.4 Synthesis of the Coupling Matrix in Arrow Form . . . . . . . . . 85
4.5 Reconfiguration of the Extracted Arrow Form Matrix . . . . . . 86
4.6 Dealing with Parasitic Couplings . . . . . . . . . . . . . . . . . . 88
4.7 Example: Single Quadruplet (SQ) Filter . . . . . . . . . . . . . . 90
4.8 Example: Cascaded Quadruplet (CQ) Filter . . . . . . . . . . . . 97
4.9 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
5 Dealing with Multiple Solutions: A Simulation Based Strategy 107
5.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
5.2 Cascaded Trisection and Quadruplet Topologies . . . . . . . . . . 108
5.3 Identification of the Physically Implemented Coupling Matrix . . 112
5.4 Tuning of a CQ filter . . . . . . . . . . . . . . . . . . . . . . . . . 117
5.5 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
6 Electromagnetic Optimization of Microstrip Bandpass Filters based on Ad-
joint Sensitivity Analysis 127
6.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
6.2 Adjoint Sensitivity of the S-parameters with respect to the Cou-
pling Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
6.3 Estimation of the Jacobian Matrix J . . . . . . . . . . . . . . . . 131
6.4 Determination of the Physically Implemented Coupling Matrix . 134
6.5 Re-optimization of the Target Coupling Matrix . . . . . . . . . . 134
6.6 Tuning Method . . . . . . . . . . . . . . . . . . . . . . . . . . . . 136
6.7 Tuning of a CT filter . . . . . . . . . . . . . . . . . . . . . . . . . 138
6.8 Tuning of a SQ filter . . . . . . . . . . . . . . . . . . . . . . . . . 149
6.9 Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153
6.10 Remarks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 154
6.11 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 154
II Metamodel Approach 157
7 Efficient and Automated Generation of Multidimensional Design Curves
using Metamodels 159
7.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
7.2 Generation of the Design Curves using Metamodels . . . . . . . . 161
7.3 Example: Hairpin Resonator Filter . . . . . . . . . . . . . . . . . 164
x

7.4 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 170
8 A Scalable Macromodeling Methodology for the Efficient Design of Mi-
crowave Filters 171
8.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171
8.2 Scalable Macromodels for Microwave Filters . . . . . . . . . . . . 173
8.3 Including the Scalable Macromodel in the Design Process . . . . 177
8.4 Macromodel based Optimization . . . . . . . . . . . . . . . . . . 178
8.5 Example: Microstrip Dual-Band Bandpass Filter . . . . . . . . . 179
8.6 Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 187
8.7 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 191
Conclusions 193
9 Conclusions 195
9.1 Comparison of the proposed approaches . . . . . . . . . . . . . . 197
9.2 Main contributions . . . . . . . . . . . . . . . . . . . . . . . . . . 199
10 Preliminary Results and Future Work 201
10.1 Preliminary Results: Parametric Modeling of the Coupling Pa-
rameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 201
10.2 Future Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 202
List of scientific publications 205
Appendices 207
A Appendix A 209
xi


List of symbols
LATIN LOWER CASE
ai transmitted power wave at port i
bi reflected power wave at port i
c phase velocity in free space ( c ≈ 3× 108 ms )
f frequency
fc center frequency in the bandpass domain
fres resonance frequency
j unit imaginary number , j2 = −1
ks filter selectivity
kX bandpass inter-resonator coupling coefficient
kB mixed bandpass coupling coefficient
kE electric bandpass coupling coefficient
kM magnetic bandpass coupling coefficient
h thickness of the dielectric substrate of a microstrip structure
l physical length of a transmission line
nF number of simulated frequencies
nfz number of transmission zeros located at a finite frequency
ng number of physical design parameters
nS number of solutions to the coupling matrix reconfiguration
problem
s Laplace variable, s = σ + jω
t thickness of metal strip of a microstrip structure
LATIN UPPER CASE
ALP nodal admittance matrix in the lowpass domain
ABP nodal admittance matrix in the bandpass
AY system matrix of the admittance matrix Y
BY input matrix of the admittance matrix Y
CY output matrix of the admittance matrix Y
xiii

DY direct transmission matrix of the admittance matrix Y
BW absolute bandwidth
Ca per unit capacitance for air
Cd per unit capacitance for a dielectric
E(s) common denominator polynomial
F (s) numerator polynomial of S11(s)
FBW fractional or relative bandwidth
GL reference admittance at the load
GS reference admittance at the source
In identity matrix of size n× nJ Jacobian matrix of the function that maps the geometrical
parameters to the coupling parameters
J J-inverter
KN filter function of order N
LA insertion loss
LR return loss
Mvv lowpass self-coupling of resonator v
Marr arrow form coupling matrix
N McMillan degree
P similarity transformation
P (s) numerator polynomial of S21(s)
Qc conductor quality factor
Qd dielectric quality factor
Qe external quality factor
Qr radiation quality factor
Qu unloaded quality factor of a resonator
Qr radiation quality factor
RL minimal return loss in the passband
S scattering matrix
SC scattering matrix with de-embedded access lines
SSim simulated scattering matrix
Srat rational scattering matrix
T coupling topology matrix
W width of metal strip of a microstrip structure
Y admittance matrix
Zc characteristic impedance
ZL reference impedance at the load
ZS reference impedance at the source
xiv

GREEK CASE
α attenuation constant
β lossless propagation constant
αkk delay introduced by the access line at port k
εr relative permittivity
εre effective dielectric constant
γ propagation constant
λ0 wavelength in free space
λg guided wavelength
tan δ loss tangent of a dielectric substrate
τ group delay
θ electrical length
ω normalized angular lowpass frequency
Ω angular bandpass frequency
Ωk resonance frequency of resonator k in the lowpass domain
Ωc center frequency in the lowpass domain
ABBREVIATIONS
AFS adaptive frequency sampling
BP bandpass
CAT computer-aided tuning
CQ cascaded quadruplet
CT cascaded triplet
dB decibels (20 log10)
EM electromagnetic
FIR frequency invariant reactance
FRF frequency response function
I/O input/output
LP lowpass
LSE least square estimation
MAE mean absolute error
MoM method of moments
PCB printed circuit board
SOLR square open loop resonator
SQ single quadruplet
TEM transverse electromagnetic
TZ transmission zero
VF vector fitting
xv


1Introduction
Microwave filters are indispensable building blocks in modern telecommunica-
tion systems. They are designed to pass electromagnetic signals within certain
frequency bands, while attenuating signals whose spectral content lies outside of
these frequency bands. Over the last years the frequency spectrum has become
more and more crowded, which automatically led to more stringent filter spec-
ifications. These specifications consist of a frequency template, which specifies
the frequency bands that should be attenuated and passed. Several techniques
have been developed to design a wide variety of microwave filters in various
technologies such as: waveguide, dielectric resonator and planar technologies
such as microstrip filters. The literature helps filter designers to select the most
convenient type of filter to meet the design requirements [Levy 02; Levy 84].
Besides the electrical specifications of the filter, that are grouped in the fre-
quency template, there are several aspects that must be taken into account such
as minimization of the mass and volume, manufacturing cost, development time
and power handling capability [Snyd 07; Kuds 92]. All these aspects influence
both the choice of the implementation technology and of the topology of the
filter to be designed. In this work we focus on the electrical specifications of the
filters. The most common design approach which is also used here, can roughly
be divided into three design stages [Matt 64]:
1. The first stage approximates or estimates a filter function that fulfills the
electrical specifications.
2. The second stage synthesizes an equivalent lumped-element network that
realizes the filter function.
3. The third stage transforms this network into the actual microwave filter
by correctly dimensioning the physical (design) parameters of the filter.
1

In this thesis we focus on the last stage of the design approach. We develop mod-
els to assist the designer in the time-efficient physical design of the distributed
element microwave filters. The aim is to incorporate these models in different
computer-aided design (CAD) methods. By a time-efficient design, we mean a
design that requires a low number of electromagnetic (EM) simulations. The
EM-simulations typically represent the most time-consuming step during the
last design stage. We propose different modeling approaches for the frequency
response behavior of the filter. The first approach models the coupling matrix
(which is introduced later) as a function of the physical design parameters and
the second approach models the scattering (S-) parameters, again as a function
of the physical parameters.
In the first part of the text we focus on the design of narrow-band microwave
bandpass filters implemented in a microstrip technology. The design of such
filters is often based on the coupling matrix theory. It models the distributed
element microwave filter by a lumped element circuit consisting of coupled LC-
resonators that resonate in the vicinity of its center frequency [Hong 01]. The
behavior of these coupled resonator circuits is represented by a coupling matrix
[Came 99; Atia 71]. This matrix contains the electromagnetic couplings between
the different resonators in the filter. The way these resonators are coupled, is
called the coupling topology. The concept of the coupling matrix was first intro-
duced in the early 1970s by Atia and Williams to design a dual-mode symmetric
waveguide filter [Atia 71; Atia 72; Atia 74]. One of its main advantages is that
it can be easily linked to the physical design parameters of the actual filter
[Came 07b].
Chapter 2 explains the concepts of the coupling matrix based design approach
that will be used in the rest of the text: the generation of a rational filter function
and the synthesis of a coupling matrix which represents the equivalent lumped-
element network. In order to translate the coupling matrix into the actual
microwave filter, it is necessary to transform the coupling matrix into a coupling
topology that is adapted to the selected filter structure. This process is often
referred to as the reconfiguration of the coupling matrix. The reconfiguration
problem is a complex problem and for some coupling topologies there are multiple
solutions. Topologies with multiple solutions are called non-canonical topologies.
Several methods have been developed to tackle the reconfiguration problem:
some of them are optimization-based [Amar 00b; Atia 98] and for some other
topologies analytical techniques exist [Tami 05]. The most general approach uses
Groebner basis and homothopy techniques to solve the reconfiguration problem
2 CHAPTER 1 INTRODUCTION

[Came 07a]. This is also the approach used here. The second stage of the design
process thus yields a coupling matrix with a suitable coupling topology. This
matrix is often referred to as the golden goal or the target coupling matrix.
The third stage of the design process is to dimension the physical filter such
that the coupling matrix of the actual filter is as close as possible to the target
matrix. This step is called the physical implementation. It often starts with
the generation of initial values for the design parameters, which are then further
optimized to meet the specifications.
Chapter 3 proposes a method to generate initial values for the physical parame-
ters. Although the method is general for various technologies, we use microstrip
filters to illustrate it. Therefore the chapter first summarizes the most important
characteristics of microstrip transmission lines that are used in the remainder of
the text. We also discuss the use of the full-wave EM field solvers that are used to
simulate the filters, which are ADS Momentum [ADS 14] and CST Microwave
Studio [CST 15]. We briefly describe the properties of both EM-solvers and the
simulation settings used in this work.
The initial dimensioning divides the filter into building blocks consisting of indi-
vidual resonators or pairs of resonators. Next, it dimensions these blocks sepa-
rately and finally merges them to obtain the complete filter. Therefore it is some-
times referred to as the ’divide and conquer strategy’ [Came 07b]. The dimen-
sioning of each individual block uses design curves. These are look-up tables that
relate the physical parameters to the coupling parameters [Pugl 00; Pugl 01].
We explain how the design curves are generated using simulated S-parameters.
This approach yields relatively good initial values for the design. Nevertheless
an optimization or tuning phase is often required to ensure that the filter meets
the specifications.
In the literature several optimization methods are available to tune microwave
filters based on various cost functions [Swan 07a; Band 94b; Arnd 04; Koza 02].
For the coupling matrix based designs, we follow an approach which compares the
golden goal to the coupling matrix of the physical filter as is done in [Lamp 04;
Koza 06]. A very important step in this approach is the extraction of the physical
coupling matrix. This can be a tedious task especially in the case of coupling
topologies supporting multiple solutions.
Chapter 4 presents a method to extract the coupling matrix starting from the
simulated (or measured) S-parameters of the filter. It first estimates a ratio-
nal common denominator matrix for the S-parameters. Next it, synthesizes a
3

coupling matrix starting from this rational approximation using the techniques
explained in Chapter 2. In general the coupling topology of this matrix does
not correspond to the physically implemented coupling topology. Moreover, the
extracted matrix contains parasitic couplings, which are not present in the golden
goal. In the case of non-canonical topologies, the process extracts all possible so-
lutions taking into account the presence of parasitics. This extraction procedures
gives rise to the following question: Which of these solutions corresponds to the
physically implemented one? Answering this is very important for the tuning of
the filter. Using a non-physical solution may lead to wrong adjustments of the
design parameters, hereby destroying the whole tuning procedure. The answer is
however not always obvious and extra information about the physical structure
of the filter is indispensable.
Chapter 5 presents a novel identification method to determine the physically im-
plemented coupling matrix in the case of cascaded trisection (CT) and cascaded
quadruplet (CQ) topologies. These topologies are often used, since they yield
very selective filter responses [Yang 99; Hong 99; Hong 01]. The identification
method basically links specific parts of the coupling matrix to specific parts
of the physical structure. To establish this link, several EM-simulations are
required. The number of required EM-simulations depends of the complexity of
the structure. The usefulness of the identification method is illustrated on the
tuning of an 8th order CQ filter. The tuning is a manual and requires a relatively
large number of EM-simulations. In order to automate the tuning procedure and
minimize the number of EM-simulations, we propose another approach based on
adjoint sensitivity analysis.
Chapter 6 presents a novel computer-aided tuning (CAT) procedure for coupled
resonator microwave bandpass filters. The method is based on the estimation
of the Jacobian of the relation between the geometrical design parameters of
the filter and the physically implemented coupling parameters. The Jacobian
is estimated by combining the adjoint sensitivity of the S-parameters with re-
spect to the coupling parameters on the one hand and the adjoint sensitivity
of the S-parameters with respect to the physical filter design parameters on
the other hand. Lately, commercial EM-simulators such as CST Microwave
Studio [CST 15] provide the adjoint sensitivities of the S-parameters with re-
spect to the geometrical or substrate parameters of the filter without drastically
increasing the simulation time. As a consequence, one EM-simulation suffices
to estimate the Jacobian. In the case of coupling topologies with multiple so-
lutions, the Jacobian is estimated for each solution separately and a criterion
4 CHAPTER 1 INTRODUCTION
is presented to determine the physical solution amongst the candidates. The
Jacobian provides a lot of useful information for the tuning procedure and we
will see that this drastically lowers the number of EM-simulations required to
tune the filter.
In the second part of the thesis we propose an alternative modeling approach
which is a based on the concept of a metamodel. A metamodel is defined in
the literature as: an approximation of the Input/Output (I/O) function that is
defined by the underlying simulation model [Klei 08]. The word meta implies
that we are actually modeling a (simulation) model. The idea is that the model
is cheaper to evaluate than the original simulation model while keeping an ac-
ceptable accuracy. In this work we consider the physical design parameters as
the input parameters of the metamodel. First we use the metamodel approach to
efficiently generate the design curves introduced in Chapter 3 to generate initial
values. In this context the output parameters of the metamodel are the coupling
parameters of the individual building blocks. Next we will use this approach to
optimize the S-parameters. The output in this case are S-parameters and the
inputs are the design parameters and the frequency. In this context we will use
the term scalable or parametric macromodel, rather than metamodel as this is
more commonly used in the literature [Triv 09; Ferr 11; Ferr 12].
Chapter 7 introduces a metamodel approach to automatically generate multi-
dimensional design curves for the initial dimensioning of coupled-resonator fil-
ters. This approach has some advantages: it requires very little user interaction
and adaptive sampling methods [Wang 07] limit the amount of EM-simulations
needed to generate the curve. Design curves can hence cheaply be generated and
used for the initial dimensioning for multiple design scenarios. The curves yield
initial values and an optimization is generally still required.
Chapter 8 introduces a CAD method based on scalable macromodels to model
the S-parameters as a function of the physical design parameters within a well de-
fined, user selected range of values. Similarly as in Chapter 7, adaptive sampling
methods are used to limit the number of required EM-simulations [Chem 14a].
The fact that the scalable macromodel is numerically cheap to evaluate, reduces
the time required to optimize the filters heavily. Moreover if the ranges of the
design parameters are chosen broad enough, the macromodel can be used to
optimize different design scenarios. Remember that broader ranges come how-
ever at the cost of longer generation times for the model. The CAD method is
applied to a state-of-the art dual-band microstrip filer.
5


PART I
Coupling Matrix Approach
7

2Narrow-band Bandpass Filter Design based on Coupling Matrix Theory
This chapter introduces the coupling matrix theory. This theory assumes that
in the vicinity of its center frequency, the distributed element microwave filter
behaves as a lumped-element circuit consisting of coupled LC-resonators The
lumped-equivalent can be represented by a coupling matrix. In this chapter we
explain the synthesis of a coupling matrix for which the corresponding filter re-
sponse fulfills the specifications; moreover we introduce important concepts that
are related to the design methodology. Section 2.2 introduces the scattering
parameters. Section 2.3 introduces the pseudo-elliptical or general Chebyshev
filter functions, which are the filter functions we focus on in this work. Section 2.4
discusses the behavior of the equivalent lumped-element network used to model
the filter in bandpass domain. Section 2.5 explains how the circuit is trans-
formed to the lowpass domain. Section 2.6 shows how a coupling matrix can be
constructed starting from the lowpass equivalent circuit. We show the relation
between the coupling matrix representation and the state-space representation
of the Y -parameters. In Section 2.7 we use this relation to directly synthesize the
coupling matrix starting from the filter function. Finally Section 2.8 discusses
how the coupling matrix can be reconfigured obtain a coupling topology that
can be physically realized.
2.1 Introduction
The design of the microwave filters considered in this work relies on the coupling
matrix theory. This design methodology assumes that in the vicinity of its
center frequency, the distributed element microwave filter behaves as a lumped-
element circuit consisting of coupled LC-resonators [Came 07b; Hong 01]. This
equivalence holds in the frequency band of interest due to the limited relative
bandwidth of the microwave filter. The behavior of these coupled resonator cir-
cuits can also be represented by a coupling matrix. One of the main advantages
9

of the coupling matrix representation is that it can easily be linked to a physical
circuit topology that is capable to realize the actual filter. This chapter discusses
how such a coupling matrix can be synthesized to ensure that the given design
specifications, called the template of the filter, can be met. Moreover, it intro-
duces some important concepts that are related to the design methodology and
are used intensively in the remainder of this text. The physical implementation
of the filters on the other hand is discussed in Chapter 3.
The electrical (design) specifications of a filter are often expressed by a fre-
quency template or spectral mask on the scattering (S-) parameters introduced
in Section 2.2. The design therefore typically starts by the approximation phase
where a filter function is either estimated or obtained from a table to ensure
that the corresponding S-parameters obey the frequency template. In order
to reduce the complexity, the specifications are transformed to the normalized
lowpass domain. In this work, we focus on the class of pseudo-elliptical or general
Chebyshev filter functions [Came 82], which is introduced in Section 2.3. This
class of filter functions has some interesting characteristics such as an equiripple
behavior in the passband and the fact that its response can be asymmetrical
with respect to the center frequency. The aim of this design methodology is to
synthesize a coupling matrix that realizes the chosen the filter function. There
are 2 ways to do this [Came 07b]:
• The first way starts with the synthesis of a lumped-element network that
realizes the requested filter function. Next, it constructs a coupling matrix
starting from the circuit element values of the network.
• The second way synthesizes a coupling matrix directly from the filter func-
tion, without the need for the circuit representation.
In this work we follow the second way, which avoids the synthesis of the lumped-
element circuit. The coupling matrix represents an equivalent lumped-element
circuit used to model the filter behavior in the vicinity of the center frequency.
Section 2.4 introduces the equivalent lumped-element circuit in the bandpass
domain. Section 2.5 explains how the network is transformed to the lowpass do-
main. Moreover it introduces the frequency invariant reactance (FIR) element,
which has a purely imaginary admittance that does not depend on the frequency.
Due to the FIR element the resonators resonate at frequencies different from the
center frequency of the filter. Such filters are called asynchronously tuned filters.
The FIR element is needed to realize frequency responses that are asymmetric
with respect to the center frequency. Section 2.6 shows how a coupling matrix
10 CHAPTER 2 NARROW-BAND BANDPASS FILTER DESIGN BASED ON COUPLING MATRIX THEORY

can be constructed starting from the equivalent circuit. This section also intro-
duces an alternative way to represent the filters frequency response namely the
admittance or (Y -) parameter representation. We show the relation between
the coupling matrix representation and the state-space representation of the Y -
parameters. In Section 2.7 we use this relation to directly synthesize the coupling
matrix starting from the filter function. The link between the coupling matrix
and the state-space representation also shows that the coupling matrix is not
unique. Applying an orthogonal similarity transformation to the coupling ma-
trix preserves the filter frequency response, while it changes the coupling matrix
topology (the way how resonators are coupled to each other). The coupling
matrix synthesis generally results in a full coupling matrix [Came 99; Seyf 07].
It is possible to transform the full coupling matrix to a canonical form such as
the arrow or the folded form. In this work we use the arrow form. Although this
is a canonical form [Seyf 98] (up to sign changes), it is not always practical (and
sometimes impossible) to implement it physically. Similarity transformations
allow to reconfigure the coupling matrix (change the coupling topology) such
that it becomes more practical to implement. Section 2.8 discusses how the
coupling matrix can be reconfigured to obtain a coupling topology that can be
physically realized. There are however limitations: not every filter response can
be implemented by any coupling topology. The link between the filter response
and the coupling topology is also discussed in this section.
2.2 Rational Form of the Scattering Parameters
2.2.1 THE SCATTERING MATRIX S
We represent the filter by a two-port network as is shown in Figure 2.1, where v1,
v2 and i1, i2 are the port voltages and port currents at port 1 and 2 respectively,
ZS and ZL are the reference impedances at port 1 and 2 respectively and eS
and eL is the source voltages at port 1 and 2 respectively. If we assume that the
reference impedances are real-valued, the transmitted and reflected powerwaves
at port 1 and 2 respectively are defined by [Kuro 65; Mark 92]:
2.2 RATIONAL FORM OF THE SCATTERING PARAMETERS 11

a1 =v1 + ZSi1
2√ZS
b1 =v1 − ZSi1
2√ZS
(2.1)
a2 =v2 + ZLi2
2√ZL
b2 =v2 − ZLi2
2√ZL
(2.2)
The scattering (S-) parameters relate the power waves at the two ports:
S11 =b1a1
∣∣∣∣a2=0
S12 =b1a2
∣∣∣∣a1=0
(2.3)
S21 =b2a1
∣∣∣∣a2=0
S22 =b2a2
∣∣∣∣a1=0
(2.4)
where a1 = 0 when eL 6= 0, eS = 0 and a2 = 0 when eS 6= 0, eL = 0 imply a
perfect match at port 1 and 2 respectively. Since the two-port system is linear
time-invariant, the S-parameters are also frequency dependent. S11 and S22 are
called the reflection coefficients and S12 and S21 the transmission coefficients.
The S-parameters can also be grouped in the scattering (S-) matrix S:
[b1
b2
]=
[S11 S12
S21 S22
][a1
a2
](2.5)
Figure 2.1 The two-port representation of the filter.
Remark that when the two-port is excited by a current source (Figure 2.2) where
GS and GL are the reference admittances and iS is the source current, the waves
become
12 CHAPTER 2 NARROW-BAND BANDPASS FILTER DESIGN BASED ON COUPLING MATRIX THEORY

a1 =GSv1 + i1
2√GS
b1 =GSv1 − i1
2√GS
(2.6)
a2 =GLv2 + i2
2√GL
b2 =GLv2 − i2
2√GL
(2.7)
2-port
Figure 2.2 The two-port representation of the filter excited by a current source.
2.2.2 ABCD-PARAMETERS
Sometimes it is convenient to represent the two-port by means of a cascadable
formalism, to obtain that a tandem connection boils down to a matrix product.
This is done using the ABCD-parameters or ABCD-matrix, which relate the
current and voltage at port 2 to the current and voltage at port 1 in the following
way [Poza 98]:
[v1
i1
]=
[A B
C D
][v2
−i2
](2.8)
where
A =v1
v2
∣∣∣∣i2=0
B =v1
i2
∣∣∣∣v2=0
(2.9)
C =i1v2
∣∣∣∣i2=0
D = − i1i2
∣∣∣∣v2=0
(2.10)
This representation is used to describe the behavior of J-inverters introduced in
Section 2.4.
2.2 RATIONAL FORM OF THE SCATTERING PARAMETERS 13

2.2.3 FILTER SPECIFICATIONS
The design of a bandpass filter starts with frequency dependent specifications
given on the amplitude and sometimes phase of the scattering parameters S11
and S21. A template imposes a maximum amount of reflection in the passband
and a minimum amount of attenuation in the stopbands (Figure 2.3). There, Ω
is the angular frequency in the bandpass domain. In the remainder of this work,
we will call the angular frequency just frequency for the ease of the reader and
the notation. The passband is defined by the lower and upper corner frequency
Ω1 and Ω2. The absolute bandwidth of the filter is BW = Ω2 −Ω1. The center
frequency of the filter is defined by Ω0 = Ω2+Ω1
2 . The fractional bandwidth is
then defined by FBW = Ω2−Ω1
Ω0. A microwave bandpass filter is considered to be
a narrow-band filter when its FBW is less than 10 % [Swan 07b]. The lower and
the upper stopbands of the filter begin at frequencies Ωs1 and Ωs2 respectively.
The selectivity of the filter is defined by ks = Ω2−Ω1
Ωs2−Ωs1(in the case the response of
the filter is symmetrical with respect to Ω0). The selectivity is a measure of the
steepness of the response in the transition zone located between the passband
and stopband. The more selective the filter becomes, the steeper the response
has to be in the transition area. For lossless filters S21 and S11 are related to
each other due to the conservation of energy:
|S11|2 + |S21|2 = 1 (2.11)
This implies that a specification on |S11| in the passband automatically puts a
specification on |S21| and vice versa.
Figure 2.3 The template imposes specifications on |S21|. |S21| needs to be aboveAmax for frequencies between Ω1 and Ω2 (passband) and below Amin forfrequencies below Ωs1 and above Ωs2 (stopbands).
14 CHAPTER 2 NARROW-BAND BANDPASS FILTER DESIGN BASED ON COUPLING MATRIX THEORY

The specifications are also often given on the insertion loss LA between port 2
and 1 and the return loss LR at port 1 which are expressed in decibel (dB) and
defined by [Came 07b]:
LA(Ω) = −20 log |S21(Ω)|LR(Ω) = −20 log |S11(Ω)|
(2.12)
2.2.4 RATIONALITY OF THE S-PARAMETERS
The idea of designing a filter is to synthesize a rational S-matrix that can be
realized and whose frequency dependent S-parameters fulfill the specifications.
In order to reduce the complexity of the design, the specifications are first trans-
formed to the lowpass domain. This halves the degree of the polynomials of
the rational S-matrix [Poza 98]. Before we discuss the properties of the rational
scattering matrix (in the lowpass domain), we introduce some notation:
• s = σ + jω is the Laplace variable and j2 = −1. We denote the real part
of a complex number s as Re(s) and the imaginary part as Im(s).
• The para-conjugate polynomial p∗(s) of the polynomial p(s) = ΣNk=0aksk
(where the ak are complex numbers) is defined by
p∗(s) =
n∑
k=0
ak(−s)k (2.13)
where ak is the complex conjugate of ak. Remark that when the polyno-
mials are evaluated on the imaginary axis (s = jω), p∗(jω) = p(jω).
• If A is a matrix, we denote its transpose as At and its Hermitian transpose
as AH = At.
When a filter is passive and loss-less, the corresponding S-matrix describing the
filter response verifies [Ande 73]:
S(jω)SH(jω) = I2 (2.14)
I2 − S(s)SH(s) ≥ 0 , for σ ≥ 0 (in the left half plane) (2.15)
2.2 RATIONAL FORM OF THE SCATTERING PARAMETERS 15

where I2 is the 2 × 2 identity matrix and the operator ≥ is to be taken in the
semi-positive definite matrix sense.
It can be shown that a 2×2, rational, loss-less and reciprocal matrix of McMillan
degree N (Section 2.7.2), which goes to the identity matrix at infinity, can always
be written in the Belevitch form [Bele 68; Seyf 07]:
S(s) =1
E(s)
[F (s) P (s)
P (s) (−1)NF ∗(s)
](2.16)
where F is monic (highest coefficient equal to 1) and has degree N . P is of degree
nfz < N , where nfz is the number of transmission zeros at finite frequencies.
The fact that S goes to the identity matrix at infinity implies that nfz < N and
that E is also monic. Because S is reciprocal, we have that P = (−1)N+1P ∗
(para-conjugated) . Therefore the zeros of P must lie symmetrically with respect
to the imaginary axis in the Laplace plane [Bele 68; Came 07b]. Since the S-
parameters are stable, E must have all of its roots in the left half-plane (Hurwitz
polynomial). E can be expressed as a function of F and P using the conservation
of energy (2.11):
F (s)F ∗(s) + P (s)P ∗(s) = E(s)E∗(s) (2.17)
Hence, S is fully characterized by the two numerator polynomials F and P . If
the roots of F and P are known, (2.17) allows to determine the roots of EE∗.
Since E is a Hurwitz polynomial, the roots of EE∗ that lie in the left half-plane
are the roots of E. The squared modulus of the transmission coefficient |S21|2can also be expressed as a function of F and P :
|S21|2 =PP ∗
EE∗=
1
1 + FF∗
PP∗
=1
1 + |FP |2(2.18)
The function KN = FP is called the filter function. To fulfill the specifications on
the S-parameters, a suitable rational filter function is chosen and its numerator
and denominator are derived. Different classes of predefined filter functions
exist such as Chebyshev, elliptic and Butterworth filter functions. In this work
we will focus on the general class of Chebyshev filter functions, also called the
pseudo-elliptical filter function [Came 82] as introduced below.
16 CHAPTER 2 NARROW-BAND BANDPASS FILTER DESIGN BASED ON COUPLING MATRIX THEORY

2.3 The Pseudo-elliptical Filter Function
The pseudo-elliptical filter function is also called the general Chebyshev filter
function because of its equiripple behavior in the passband. All of its reflec-
tion zeros lie on the imaginary axis in the passband [Came 82]. This class of
filter functions also allows to place transmission zeros at finite frequencies, as
long as they come in symmetric pairs with respect to the imaginary axis (para-
conjugated character of P ). This is convenient to realize characteristics that are
asymmetrical with respect to ω = 0, when the zeros are placed on the imaginary
axis in an asymmetric way. This type of characteristic is what we we want to
realize in this thesis. The zeros are chosen in such a way that the template spec-
ifications are met. The number of transmission zeros nfz which can be placed
by the type of filters considered in this work is maximally N − 2 for a filter of
order N . This is a direct consequence of the ’shortest path rule’ (Theorem 1)
which is explained in Section 2.8.
The transmission zeros can also be complex (not purely imaginary). This im-
proves the phase and group delay response of the filter at the cost of a decreased
attenuation in the stopband [Came 07b].
2.3.1 SYNTHESIS OF THE FILTER FUNCTION
The pseudo-elliptical filter function has the form [Came 82]:
KN (ω) =F1(ω)
P1(ω)= cosh[
N∑
k=1
cosh−1(xk(ω))] (2.19)
xk is a function of the frequency variable ω and is given by:
xk =ω − 1
ωk
1− ωωk
(2.20)
where ωk is a prescribed transmission zero located at a finite frequency (sk =
jωk) or a zero at an infinite frequency (ωk = ±∞). Remark that KN is a
function of ω (not of jω).
When all of the transmission zeros are placed at an infinite frequency, the filter
function becomes the classical Chebyshev filter function:
KN (ω)∣∣∣ωk→∞,∀k∈1,...,N
= cosh[N cosh−1(ω))] (2.21)
2.3 THE PSEUDO-ELLIPTICAL FILTER FUNCTION 17

As explained in Section 2.2, S11 and S21 can be written as
S11(ω) =F1(ω)
E1(ω)and S21(ω) =
P1(ω)
εE1(ω)
where the polynomials are monic. Note that F1, P1 and E1 are functions of ω.
ε is a constant whose value is related to the minimal return loss RL (expressed
in dB) in the passband as follows:
ε = (10RL10 − 1)−
12
∣∣∣P1(1)
F1(1)
∣∣∣ (2.22)
where P1
F1is evaluated at the edge of the passband ω = 1. The return loss is linked
to S11 by (2.12). The minimum return loss RL is the inverse of the amplitude of
the maximum reflection in the passband (2.12). Since the passband is equiripple,
the amplitude of the reflection becomes maximal at its edges. Therefore P1 and
F1 are evaluated in ω = 1 in (2.22).
Since the transmission zeros of P1 (the poles of KN ) are prescribed, the computa-
tion of the coefficients of P1 is straightforward. Different recursion relations are
formed in the literature to determine the coefficients of F1 [Amar 00b; Came 82].
The recursion relations are not repeated here. To obtain the coefficients of F , P
and E, the coefficient of ωk must be divided by jk to obtain the coefficient for
sk.
2.3.2 EXAMPLES
This section discusses two examples to clarify what was explained above: an
asymmetrical and symmetrical filter function are selected. We denote a filter in
the lowpass domain of order N having nfz finite transmission zeros as a (N,nfz)
filter.
Asymmetric (6,2) Pseudo-Elliptic Filter
The first example is a filter function of order 6 with 2 prescribed finite trans-
mission at ω = 1.3 and ω = 1.8. The equiripple return loss in the passband is
RL = 22 dB, which corresponds to ε = 4.4777. Figure 2.4 shows the magnitude
of the corresponding transmission and reflection coefficients. Figure 2.5 shows
the corresponding transfer zeros, reflection zeros and poles. The coefficients of
18 CHAPTER 2 NARROW-BAND BANDPASS FILTER DESIGN BASED ON COUPLING MATRIX THEORY

the polynomials are complex.
−3 −2 −1 0 1 2 3
−60
−40
−20
0
ω
|S11|&|S
21|(
dB
)
Figure 2.4 Magnitude of S11 (—) and S21 (—) of (6-2) asymmetric pseudo-ellipticalfilter in the lowpass domain, with RL = 22 dB and finite transmissionzeros at ω = 1.3 and ω = 1.8.
−0.6 −0.4 −0.2 0
−1
0
1
2
Real Part of s
Imag
inar
yP
art
ofs
Figure 2.5 Pole-zero map of the transmission and reflection coefficients for a (6-2)asymmetric pseudo-elliptical filter in the lowpass domain. The transmis-sion zeros are shown in blue (o), the reflection zeros in black (o) and thepoles in red (x).
2.3 THE PSEUDO-ELLIPTICAL FILTER FUNCTION 19

Symmetric (8,4) Pseudo-Elliptic Filter
The second example is a filter function of order 8 with 4 prescribed finite trans-
mission at ω = ±1.2 and ω = ±1.5. The equiripple return loss in the band
is RL = 20 dB, which corresponds to ε = 19.1338. The zeros of both P (s)
and F (s) lie on the imaginary axis symmetrically with respect to the real axis
(Figure 2.7). Figure 2.6 shows the magnitude of the corresponding transmission
and reflection coefficients. The coefficients of the polynomials are real.
−3 −2 −1 0 1 2 3
−60
−40
−20
0
ω
|S11|&|S
21|(
dB
)
Figure 2.6 Magnitude of S11 (—) and S21 (—) of (8-4) symmetric pseudo-elliptical fil-ter in the lowpass domain, with RL = 20 (- - -) dB and finite transmissionzeros at ω = ±1.2 and ω = ±1.5.
20 CHAPTER 2 NARROW-BAND BANDPASS FILTER DESIGN BASED ON COUPLING MATRIX THEORY

−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2
−1
0
1
Real Part of s
Imag
inary
Par
tof
s
Figure 2.7 Pole-zero map of the transmission and reflection coefficients for a (8-4)symmetric pseudo-elliptical filter in the lowpass domain. The transmissionzeros are shown in blue (o), the reflection zeros in black (o) and the polesin red (x).
2.4 Equivalent Lumped Bandpass Network
In the vicinity of its center frequency Ω0, the behavior of an N th order narrow-
band bandpass microwave filter can be modeled using an equivalent network that
consists of N parallel LC resonators (Figure 2.8) [Came 07b; Hong 01; Matt 64].
Each resonator k consists of a shunt inductor L′k in parallel with a capacitor C ′kand conductance G′k (in the case of losses). The resonators are coupled to each
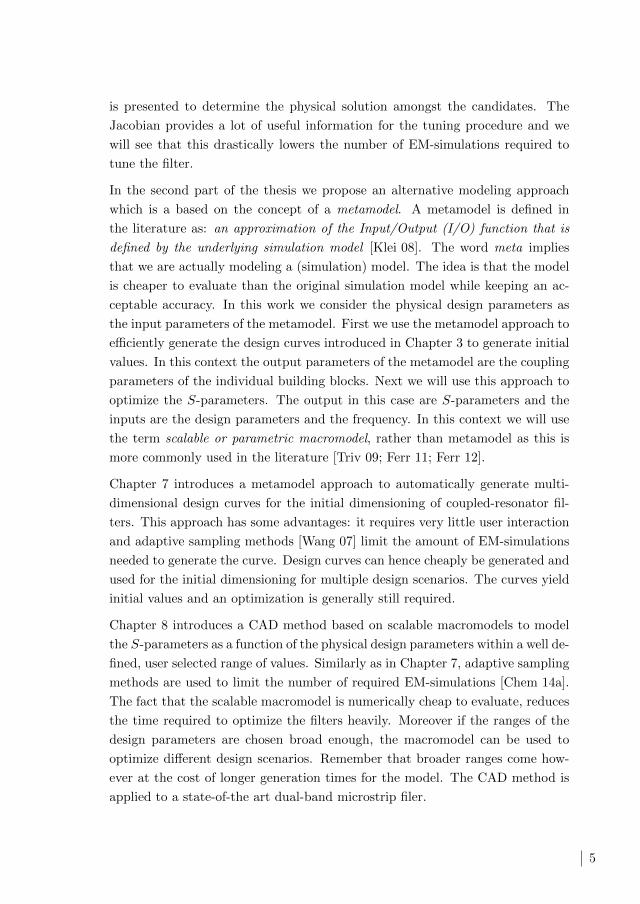
other through mutual capacitances C ′lk = C ′kl. The behavior of the mutual
capacitance is described using an ABCD-matrix formalism (Section 2.2.2). It
relates the current i1 flowing in the inverter at port 1 and the voltage u1 presented
at port 1 to the current i2 flowing in the inverter at port 2 and the voltage u2
presented at port 2:
[u1
i1
]=
[0 1
jΩC′12
jΩC ′12 0
][u2
−i2
](2.23)
An equivalent circuit of the mutual capacitance is shown in Figure 2.9 [Mont 48].
In the case of asynchronously tuned filters, the resonant frequency of the indi-
vidual resonators Ωk = 1√L′kC
′k
does not correspond to Ω0 for all resonators. The
first resonator is coupled to the source by a mutual capacitance C ′S1. Similarly,
2.4 EQUIVALENT LUMPED BANDPASS NETWORK 21

the Nth resonator is coupled to the load by a mutual capacitance C ′NL. In the
case of a lossless filters, all of the conductances are zero (G′1 = . . . = G′N = 0).
Applying Kirchoff’s Current Law in every node yields the following result:
iS
0
0...
0
0
= ABP
US
U1
U2
...
UN
UL
(2.24)
where
ABP =
GS jΩC ′S1 0 . . . 0 0
jΩC ′S1 Y ′1 jΩC ′12 . . . jΩC ′1N 0
0 jΩC ′12 Y ′2 . . . jΩC ′2N 0...
.... . .
...
0 jΩC ′1N jΩC ′2N . . . Y ′N jΩC ′LN0 0 0 . . . jΩC ′LN GL
(2.25)
with
Y ′k = jΩC ′k +1
jΩL′k+G′k (2.26)
The network shown in Figure 2.8 models the filter in the bandpass domain (Ω).
Since the rational S-matrix is synthesized in the normalized lowpass domain (ω),
we need to also transform the network to the lowpass domain.
Figure 2.8 Equivalent lumped-element bandpass network of the microwave filter inthe vicinity of Ω0.
22 CHAPTER 2 NARROW-BAND BANDPASS FILTER DESIGN BASED ON COUPLING MATRIX THEORY
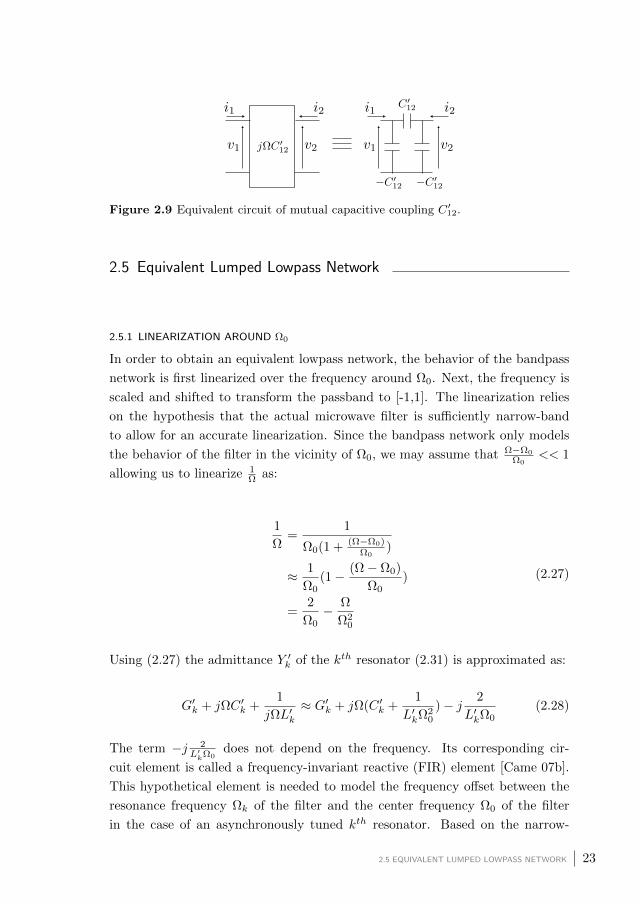
Figure 2.9 Equivalent circuit of mutual capacitive coupling C′12.
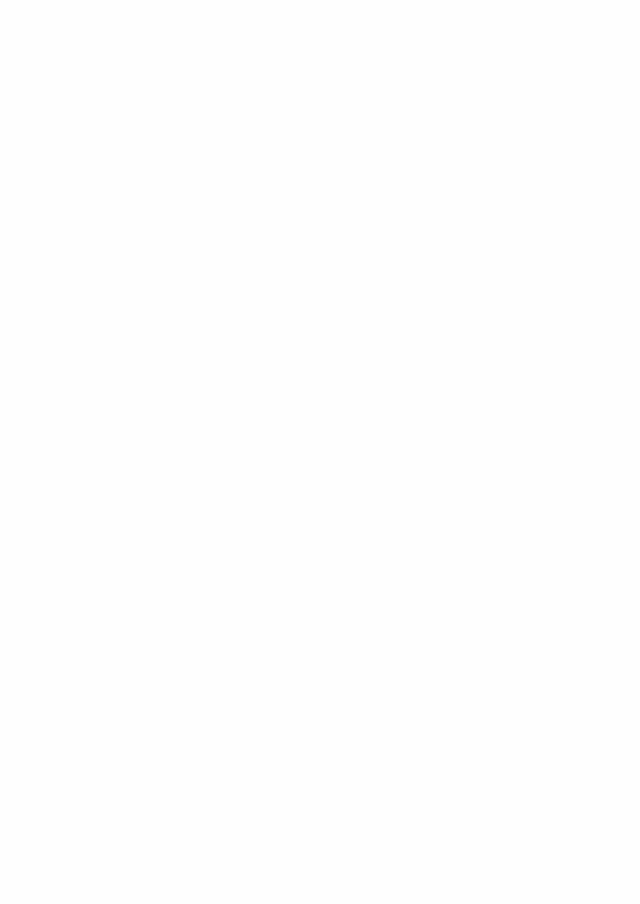
2.5 Equivalent Lumped Lowpass Network
2.5.1 LINEARIZATION AROUND Ω0
In order to obtain an equivalent lowpass network, the behavior of the bandpass
network is first linearized over the frequency around Ω0. Next, the frequency is
scaled and shifted to transform the passband to [-1,1]. The linearization relies
on the hypothesis that the actual microwave filter is sufficiently narrow-band
to allow for an accurate linearization. Since the bandpass network only models
the behavior of the filter in the vicinity of Ω0, we may assume that Ω−Ω0
Ω0<< 1
allowing us to linearize 1Ω as:
1
Ω=
1
Ω0(1 + (Ω−Ω0)Ω0
)
≈ 1
Ω0(1− (Ω− Ω0)
Ω0)
=2
Ω0− Ω
Ω20
(2.27)
Using (2.27) the admittance Y ′k of the kth resonator (2.31) is approximated as:
G′k + jΩC ′k +1
jΩL′k≈ G′k + jΩ(C ′k +
1
L′kΩ20
)− j 2
L′kΩ0(2.28)
The term −j 2L′kΩ0
does not depend on the frequency. Its corresponding cir-
cuit element is called a frequency-invariant reactive (FIR) element [Came 07b].
This hypothetical element is needed to model the frequency offset between the
resonance frequency Ωk of the filter and the center frequency Ω0 of the filter
in the case of an asynchronously tuned kth resonator. Based on the narrow-
2.5 EQUIVALENT LUMPED LOWPASS NETWORK 23

band hypothesis, the coupling between resonators is seen to become frequency
independent too:
jΩC ′kl ≈ jΩ0C′kl = jCkl (2.29)
Shifting and scaling the frequency Ω, transforms Ω to the lowpass frequency ω
such that the pass-band of the filter corresponds to the frequency range ω ∈[−1, 1]. To this end we define ω as follows:
ω =2
Ω2 − Ω1(Ω− Ω0) =
2
BW(Ω− Ω0) (2.30)
Using (2.30) we can now express the impedance under the linearized approxi-
mation (2.28) as a function of ω:
G′k + jωBW
2Ω0(C ′kΩ0 +
1
L′kΩ0) + j(C ′kΩ0 −
1
L′kΩ0) = Gk + jωCk + jBk (2.31)
where
Gk = G′k
Ck =FBW
2(C ′kΩ0 +
1
L′kΩ0)
Bk = (C ′kΩ0 −1
L′kΩ0)
(2.32)
Note that because Gk is frequency invariant, it remains unchanged under the
transformation. Also note that when 1√L′kC
′k
= Ω0, there is no frequency offset
with respect to Ω0 and thus Bk = 0. Applying Kirchoff’s Current Law in every
node of the network of Figure 2.10 yields the following result:
24 CHAPTER 2 NARROW-BAND BANDPASS FILTER DESIGN BASED ON COUPLING MATRIX THEORY
iS
0
0...
0
0
= ALP
US
U1
U2
...
UN
UL
(2.33)
where
ALP =
GS jCS1 0 . . . 0 0
jCS1 Y1 jC12 . . . jC1N 0
0 jC12 Y2 . . . jC2N 0...
.... . .
...
0 jC1N jC2N . . . YN jCLN
0 0 0 . . . jCLN GL
(2.34)
Figure 2.10 Equivalent lumped-element lowpass network of the microwave filter in thenormalized lowpass domain ω. The dashed arrows model the possiblepresence of source-to-resonator CSk, load-to-resonator CkL and directsource-to-load CSL coupling.
Equations (2.33) and (2.34) describe the behavior of the equivalent lumped-
element network in the normalized lowpass domain ω as is shown in Figure 2.10.
The frequency independent coupling jCkl, behaves as admittance or J- inverter
[Hong 01]. This behavior is described by an ABCD-matrix which relates the
current i1 flowing in the inverter at port 1 and the voltage u1 presented at port
1 to the current i2 flowing in the inverter at port 2 and the voltage u2 present
at port 2 (Figure 2.11):
2.5 EQUIVALENT LUMPED LOWPASS NETWORK 25

[u1
i1
]=
[0 ± 1
jJ
∓jJ 0
][u2
−i2
](2.35)
When an admittance inverter J is terminated in an impedance Y2 at one port,
one sees an admittance Z1 = J2
Y1when looking from the other port [Matt 64]
(Figure 2.12). This last property is used to normalize the source and load ad-
mittance GS and GL to one by choosing MS1 =√GS and MLN =
√GL.
Figure 2.11 Behavior of an admittance or J− inverter.
Figure 2.12 Admittance Y1 = J2
Y2seen from port 1, when a J-inverter is terminated
in Y2.
In some microwave filters however, the source is not only coupled to the first res-
onator but also to other resonators (source-to-resonator k coupling). Similarly,
the load can be coupled to other resonators than the N th resonator (load-to-
resonator k coupling). It is even possible that there is a direct coupling between
the source and the load. In that case the matrix ALP (2.34) becomes:
ALP,SL =
GS jCS1 jCS2 . . . jCSN jCSL
jCS1 Y1 jC12 . . . jC1N jCL1
jCS2 jC12 Y2 . . . jC2N jCL2
......
. . ....
jCSN jC1N jC2N . . . YN jCLN
jCSL jCL1 jCL2 . . . jCLN GL
(2.36)
Although we do not synthesize coupling structures for a source-to-resonator k
and load-to-resonator k coupling, such couplings can be present in the actual mi-
26 CHAPTER 2 NARROW-BAND BANDPASS FILTER DESIGN BASED ON COUPLING MATRIX THEORY
crowave filter. We already mention them here as they will prove to be important
in the remainder of the text.
2.5.2 DISCUSSION OF THE EQUIVALENT NETWORK BEHAVIOR
Due to the linearization of the term 1Ω (2.27) the order of the equivalent lowpass
network is halved (2.28) with respect to the bandpass filter. For the bandpass
lumped-element network (and thus for the actual microwave filter) the resonant
frequency of each resonator is double namely Ωk and −Ωk. This is no longer the
case for the equivalent lowpass network. The introduction of the FIR element
Bk accounts for the difference in resonant frequency of the LC-resonators in the
bandpass domain and the filter center frequency Ω0.
Section 2.6 introduces the coupling matrix representation of the lumped-element
circuit. This representation will be used here to implement the microwave filter.
Techniques exist to synthesize a lumped-element network from the polynomials
F ,P and E [Bele 68]. The synthesis techniques are not discussed in this work,
as we will synthesize the coupling matrix directly from F ,P and E instead and
will hereby avoid the synthesis of the network all together.
2.5.3 LINK TO THE CLASSICAL BANDPASS-TO-LOWPASS TRANSFORMATION
In classical network synthesis a different bandpass-to-lowpass frequency trans-
formation is often used to go from the bandpass to the lowpass domain:
ω =1
FBW(
Ω
Ω0− Ω0
Ω) (2.37)
The advantage of the classical bandpass-to-lowpass transformation is that it
transforms all lowpass circuit elements to bandpass resonators resonating at
Ω0, which is the case for all the symmetrical responses. In microwave filters
having asymmetrical responses, the resonators are not synchronously tuned. The
transformation given by (2.37) also yields the equivalent lumped lowpass network
presented in Section 2.5 if FIR elements are included in the bandpass domain
to model the offset between individual resonant frequency of resonator and the
center frequency of the filter [Came 07b]. Note that the classical transformation
transforms the positive (around Ω0) and negative (around −Ω0) bandpass image
to the lowpass domain. The linearization as is used here only takes the positive
bandpass behavior around Ω0 into account. Both transformations result in a
lowpass prototype that has half the order of the original bandpass filter.
2.5 EQUIVALENT LUMPED LOWPASS NETWORK 27

2.6 Coupling Matrix Representation
This section introduces the coupling matrix representation of coupled-resonator
filters. One of the benefits is that matrix operations such as an inversion or a
similarity transformation can be applied to the coupling matrix directly resorting
to network transformations. These operations simplify both the analysis and the
synthesis of the microwave filter.
Moreover the coupling matrix elements can easily be linked to the elements in
the microwave filter, which simplifies the diagnosis as well as the tuning.
We discuss next how the coupling matrix can be derived from the lowpass
lumped-element circuit. This coupling matrix used here is referred to as the
N + 2 coupling matrix, as it also contains source-to-resonator k coupling, load-
to-resonator k coupling and source-to-load coupling [Came 03]. At the end of
this section we introduce the admittance (Y -) parameters and use them to dis-
cuss the relation between the coupling matrix and the state-space representation
based on the Y -parameters. In Section 2.7 we use this relation to synthesize the
coupling matrix from F ,P and E.
2.6.1 THE N + 2 COUPLING MATRIX
Dividing row k ∈ 2, . . . , N by√Ck−1 and dividing column l ∈ 2, . . . , N by√
Cl−1 normalizes the set of equations given in (2.33) and (2.34). The normalized
matrix ALP becomes:
28 CHAPTER 2 NARROW-BAND BANDPASS FILTER DESIGN BASED ON COUPLING MATRIX THEORY

A =
1 j CS1√C1
0 . . . 0 0
j LS1√C1
jω + jB1
C1+ G1
C1j C12√
C1C2. . . C1N√
C1CN0
0 j C12√C1C2
jω + jB2
C2+ G2
C2. . . j C2N√
C2CN0
......
. . ....
0 j C1N√C1CN
j C2N√C2CN
. . . jω + jBNCN + GNCN
j CLN√CN
0 0 0 . . . j CLN√CN
1
=
1 jMS1 0 . . . 0 0
jMS1 jω + jM11 + G1
C1jM12 . . . jM1N 0
0 jM12 jω + jM22 + G2
C2. . . jM2N 0
......
. . ....
0 jM1N jM2N . . . jω + jMNN + GNCN
jMLN
0 0 0 . . . jMLN 1
= M +G+ jωIN+2
(2.38)
Herein, the matrix M is called the N + 2 coupling matrix, which is obtained as:
M =
1 jMS1 0 . . . 0 0
jMS1 jM11 jM12 . . . jM1N 0
0 jM12 jM22 . . . jM2N 0...
.... . .
...
0 jM1N jM2N . . . jMNN jMLN
0 0 0 . . . jMLN 1
(2.39)
The inner part of M containing rows k ∈ 2, . . . , N + 1 and columns l ∈2, . . . , N + 1) describes the inter-resonator coupling and is defined as the N ×N coupling matrix. The diagonal elements Mkk define the self-couplings. A
coupling Mk(k+1) is called a sequential coupling and a coupling Mlk (k 6= l +
1,resonator l and k are not adjacent) is called a cross-coupling.
The matrix G contained in (2.38) is a diagonal matrix of size (N + 2)× (N + 2)
where the diagonal elements are GkCk
and the first and last elements of the diagonal
are 0. WritingGk and Ck as a function of the bandpass equivalent elements yields
(2.32)):
2.6 COUPLING MATRIX REPRESENTATION 29

GkCk
=1
Qk
1
FBW(2.40)
These elements can be interpreted as the inverse of the quality factor Qk of
the kth LC resonator of the bandpass equivalent if the non-diagonal coupling
elements are purely imaginary [Came 07b]. The matrix IN+2 is an identity
matrix of size (N +2)× (N +2) where the first and last elements of the diagonal
are 0. Figure 2.13 shows the equivalent network that is represented by the matrix
A.
To denormalize the bandwidth of the coupling matrix, it suffices to multiply
the inter-resonator couplings Mkl and frequency offsets Mkk by FBW and the
source-to-resonator and load-to-resonator coupling by√FBW (2.32).
Figure 2.13 Equivalent lumped-element lowpass network of the microwave filter thatis represented by the matrix A
2.6.2 S-PARAMETERS AS A FUNCTION OF A
It is possible to express the S-parameters as a function of A−1. Multiplying
both sides of (2.33) by A−1 yields:
A−1
iS
0
0...
0
0
=
US
U1
U2
...
UN
UL
(2.41)
30 CHAPTER 2 NARROW-BAND BANDPASS FILTER DESIGN BASED ON COUPLING MATRIX THEORY

Which allows to write:
US = [A−1]1,1iS
UL = [A−1]N+2,1iS(2.42)
where [A]k,l denotes element (k, l) of the matrix A. Since GS = GL = 1, we
also have that (Figure 2.13):
i1 = iS − USi2 = −v2 = −UL
(2.43)
Using the definitions for the S-parameters for a normalized impedance (ZS =
ZL = 1) ((2.4)) we write:
S11 =v1 − i1v1 + i1
=US − i1iS
=US − (iS − US)
iS
=iS(2[A−1]1,1 − 1)
iS
= 2[A−1]1,1 − 1
(2.44)
S21 =v2 − i2v1 + i1
=UL − i2iS
=2ULiS
=iS(2[A−1]N+2,1)
iS
= 2[A−1]N+2,1
(2.45)
To calculate S12 and S22 as a function of the elements of A−1, an ideal current
source providing current iL in parallel with a normalized conductance GL = 1
must be presented at port 2 and port 1 must be terminated in a normalized
conductance GS = 1. This yields:
2.6 COUPLING MATRIX REPRESENTATION 31

i1 = −v1 = −USi2 = iL − UL
(2.46)
S22 =v2 − i2v2 + i2
=UL − i2iL
=iL(2[A−1]N+2,N+2 − 1)
iL
= 2[A−1]N+2,N+2 − 1
(2.47)
S12 =v1 − i1v2 + i2
=US − i2iL
=iL(2[A−1]1,N+2)
iL
= 2[A−1]1,N+2
(2.48)
Expressions (2.44), (2.45), (2.47) and (2.48) will be used to calculate the sen-
sitivity of the S-parameters with respect to the the elements of the coupling
matrix M (2.39).
2.6.3 LINK TO THE STATE-SPACE REPRESENTATION
The Admittance Matrix Y
When the filter is represented by a linear time-invariant two-port network (Fig-
ure 2.1), the admittance (Y -) parameters relate the input port voltage v1 and
output port voltage v2 to the input port current i1 and output port current i2
[Poza 98]:
Y11 =i1v1
∣∣∣∣v2=0
Y12 =i1v2
∣∣∣∣v1=0
(2.49)
Y21 =i2v1
∣∣∣∣v2=0
Y22 =i2v2
∣∣∣∣v1=0
(2.50)
The Y -parameters can also be grouped in the admittance matrix Y :
32 CHAPTER 2 NARROW-BAND BANDPASS FILTER DESIGN BASED ON COUPLING MATRIX THEORY

[i1
i2
]=
[Y11 Y12
Y21 Y22
][v1
v2
]= Y
[v1
v2
](2.51)
Note that the Y -matrix models the behavior of the filter as a function of
frequency. An equivalent representation of the dynamics contained in the Y -
parameters is contained in the state-space representation.
State-space representation of the equivalent lowpass network
The state-space representation [Kail 80] of the Y -parameter matrix is:
x(t) = AY x(t) +BY
[v1(t)
v2(t)
]
[i1(t)
i2(t)
]= CY x(t) +DY
[v1(t)
v2(t)
] (2.52)
with
• x : a vector of size N × 1 containing the states of the system, also called
the state-vector
• x : the time derivative of the state-vector of size N × 1
• AY : the system matrix of size N ×N
• BY : the input matrix of size N × 2
• CY : the output matrix of size 2×N
• DY : the direct transmission matrix of size 2× 2
We now determine the state-space representation of the system starting from the
Y -parameters of the low-pass equivalent network. We consider the general case
where every resonator is coupled to the source and the load and there is a direct
source to load coupling. We consider the N rows k ∈ 2, . . . , N + 1 of ALP,SL
((2.36)) and write (2.33) in the time-domain. Next, we group the derivative
of [U1, . . . , UN ]t on the left hand side (LHS) and we split up the contributions
of [U1, . . . , UN ]t and [US , UL]t on the right hand side (RHS) of the resulting
expression as follows:
2.6 COUPLING MATRIX REPRESENTATION 33

dU1(t)dt
dU2(t)dt...
dUN (t)dt
=
−G1+jB1
C1− jC12
C1. . . − jC1N
C1
− jC12
C2−G2+jB2
C2. . . − jC2N
C2
......
. . ....
− jC1N
CN− jC2N
C2. . . −GN+jBN
CN
U1(t)
U2(t)...
UN (t)
+
−j CS1
C1−j CL1
C1
−j CS2
C2−j CL2
C2
......
−j CSNCN−j CLNCN
[US
UL
](2.53)
The first and last row of ALP,SL ((2.36)) allow to determine i1 and i2. Since
i1 = iS −GSUS and i2 = iL −GLUL, we write:
[i1
i2
]=
[jCS1 jCS2 . . . jCSN
jCL1 jCL2 . . . jCLN
]
U1(t)
U2(t)...
UN (t)
+
[0 jCSL
jCSL 0
][US
UL
](2.54)
Equations (2.53) and (2.54) are a state-space representation of the admittance
parameters of the lowpass equivalent network. The states in this case are the
voltages U = [U1, . . . , UN ]t. This state-vector U however can be transformed to
another state-vector x = PU , where P is an invertible matrix of size N × N .
Applying the transformation P to a state-space representation yields:
xP = Px
APY = PAY P−1
BPY = PBY
CPY = CY P−1
(2.55)
Assume that we choose P such that the state-vector U is transformed to obtain a
system matrix that is symmetric and an input matrix that becomes the transpose
of the output matrix. To this end, we choose P as:
34 CHAPTER 2 NARROW-BAND BANDPASS FILTER DESIGN BASED ON COUPLING MATRIX THEORY

P =
j√C1 0 . . . 0
0 j√C2 . . . 0
.... . .
...
0 . . . 0 j√CN
(2.56)
Applying the transformation P to (2.53) and (2.54) yields:
x =
−G1+jB1
C1− jC12√
C1C2. . . − jC1N√
C1CN
− jC12√C1C2
−G2+jB2
C2. . . − jC2N√
C2CN...
.... . .
...
− jC1N√C1CN
− jC2N√C2CN
. . . −GN+jBNCN
x+
CS1√C1
CL1√C1
CS2√C2
CL2√C2
......
CSN√CN
CLN√CN
[v1
v2
]
[i1
i2
]=
[CS1√C1
CS2√C2
. . . CSN√CN
CL1√C1
CL2√C2
. . . CLN√CN
]x+
[0 jCSL
jCSL 0
][v1
v2
]
(2.57)
Using the notation introduced in Section 2.6.1 we write (2.57) as:
x =
−jM11 − G1
C1−jM12 . . . −jM1N
−jM12 −jM22 − G2
C2. . . −jM2N
......
. . ....
−jM1N −jM2N . . . −jMNN − GNCN
x
+
MS1 ML1
MS2 ML2
......
MSN MLN
[v1
v2
]
[i1
i2
]=
[MS1 MS2 . . . MSN
ML1 ML2 . . . MLN
]x+
[0 jCSL
jCSL 0
][v1
v2
]
(2.58)
Where x = PU . In the case of a lossless filter, where only the first resonator is
coupled to the source and the last resonator is coupled to the load the state-space
representation of (2.58) becomes:
2.6 COUPLING MATRIX REPRESENTATION 35

x =
−jM11 −jM12 . . . −jM1N
−jM12 −jM22 . . . −jM2N
......
. . ....
−jM1N −jM2N . . . −jMNN
x+
MS1 0
0 0...
...
0 MLN
[v1
v2
]
[i1
i2
]=
[MS1 0 . . . 0
0 0 . . . MLN
]x
(2.59)
(2.59) shows that if the system matrix is symmetrical and the input matrix is
the transpose of the output matrix, the system matrix APY is equal to the
N ×N coupling matrix with a negative sign. Moreover the input BPY and out-
put CPY matrix contain the source-to-resonator couplings and load-to-resonator
couplings. The direct transmission matrix DY only exist in the case of a direct
source-to-load coupling. Note that applying a similarity transformation to the
coupling matrix preserves the frequency response while it changes the coupling
matrix. This means that the coupling matrix is not unique representation and
thus several equivalent coupling matrices exist that realize the same filter.
Transforming (2.58) back to the frequency domain and eliminating the state-
vector allows to write the Y -parameters as a function of the state-space matrices:
Y (s) = CY (sIN −AY )−1BY +DY (2.60)
Herein, (AY ,BY ,CY ,DY ) is also called a realization of Y .
2.7 Synthesis of the Coupling Matrix
This section explains how to perform the synthesis of a coupling matrix starting
from the polynomials F ,P and E found in Section 2.3. First we transform the
S-matrix to the Y -matrix using the Cayley transformation. Next we construct
a minimal realization of the Y -matrix using Gilbert’s method [Gilb 63]. Finally,
we transform the obtained realization to a canonical form. In this case we
choose the arrow form [Seyf 98]. The obtained system matrix corresponds to
the canonical arrow form coupling matrix up to a sign change (2.59).
36 CHAPTER 2 NARROW-BAND BANDPASS FILTER DESIGN BASED ON COUPLING MATRIX THEORY

2.7.1 CAYLEY TRANSFORMATION AND PROPERTIES OF Y
The scattering matrix S is transformed to the admittance matrix Y using the
Cayley transformation:
Y = (I2 − S)(I2 + S)−1 (2.61)
Applying the transformation to (2.16) yields Y as a function of F ,P and E:
Y =
[E − F + (−1)N+1(E∗ − F ∗) −2P
−2P E + F + (−1)N+1(E∗ + F ∗)
]
E + F + (−1)N (F ∗ + E∗)
=1
q
[n11 n12
n12 n22
] (2.62)
Note that since F and E are monic, the numerators of Y11 and Y22 are of degree
N − 1. The admittance matrix has a common denominator:
q = E + F + (−1)N (F ∗ + E∗) (2.63)
Since the filter is passive and loss-less the corresponding Y -matrix verifies the
conditions [Ande 73]:
Y (jω) + Y H(jω) = 0 (2.64)
Y (s) + Y H(s) ≥ 0 , for Re(s) = σ ≥ 0 (2.65)
Note that these relations express the same properties as (2.14) and (2.15). Due
to the analytic continuation of Y (2.64) implies:
Y (s) = −Y ∗(s) (2.66)
This means that the poles of Y must be symmetrical with respect to the imag-
inary axis. If si is a pole of Y , by (2.66) we have that:
2.7 SYNTHESIS OF THE COUPLING MATRIX 37

q(si) = 0⇒ q∗(si) = 0 (2.67)
Using the definition of the para-conjugation we can write:
q∗(si) = q(−si) = 0 (2.68)
which yields:
q(−si) = 0⇒ q(−si) = 0 (2.69)
(2.69) shows that if si is a pole of Y , −si is also a pole of Y and therefore the
poles must lie symmetrically with respect to the imaginary axis.
Due to (2.65) the real part of Y is a semi-positive matrix of s when the real part
of s is equal or greater than zero. This implies that the real part of the diagonal
elements of Y , Y11 and Y22 is non-negative when evaluated for s in the right half
plane. We will use this property to show that the poles are purely imaginary,
simple and that their residues are non-negative.
In the vicinity of a pole si of multiplicity n of Y11(s) (the rationale is similar for
Y22), we have that:
Y11(s)R
(s− si)n=
rejφ
(s− si)n, for s→ si (2.70)
where R ∈ C. Assume that Y11 has a pole si in the right half plane. On a circle
with a center si and a radius ρ (s = si + ρejθ), we can write:
Y11(s) ≈ rejφ
ρejnθ=r
ρej(φ−nθ) (2.71)
The real part of (2.71) is:
Re(Y11(s)) =r
ρcos(φ− nθ) (2.72)
If we run over a circle around a pole in the right half plane (θ : 0 → 2π), the
sign of Re(Y11(s)) changes n times. This is in contradiction with the fact that
Re(Y11(s)) ≥ 0 for σ ≥ 0, thus Y has no poles in the right half plane. In
38 CHAPTER 2 NARROW-BAND BANDPASS FILTER DESIGN BASED ON COUPLING MATRIX THEORY

combination with the fact that the poles must lie symmetrically with respect to
the imaginary axis, this yields that the poles must lie on the imaginary axis.
If we now run over the part of a circle around an imaginary pole jωi that lies in
the right half plane (θ : −π2 → π2 ), the sign of Re(Y11(s)) does not change if and
only if n = 1 and φ = 0. This shows that the multiplicity of jωi is 1. Moreover
since R = rejφ = r is the residue of the pole, this shows that the residue is real
and positive.
Since the poles are simple and purely imaginary, Y admits the following partial
expansion :
Y =
N∑
k=1
R(k)
s− jωk=
N∑
k=1
[r
(k)11 r
(k)12
r(k)21 r
(k)22
]
s− jωk(2.73)
Substituting (2.73) in (2.66) yields:
−N∑
k=1
R(k)
s− jωk=
N∑
k=1
RH(k)
−s+ jωk(2.74)
Thus we have that R(k) = RH(k). Since R(k) is symmetrical, we also have that
R(k) = Rt(k) and therefore R(k) is a real symmetric matrix.
Substituting (2.73) in (2.65) yields:
Y + Y H =
N∑
k=1
R(k)(1
s− jωk+
1
s+ jωk) =
N∑
k=1
R(k)2 Re(s)
|s− jωk|2(2.75)
Since Y + Y H is semi-positive definite matrix for σ ≥ 0, we have ∀x ∈ C2:
xH(Y + Y H)x =
N∑
k=1
xHR(k)x2σ
|s− jωk|2≥ 0 (2.76)
(2.76) is only true if xHR(k)x ≥ 0 and therefore R(k) is also a semi-positive
definite matrix.
Writing Y21 = Y12 in its pole-residue form yields:
2.7 SYNTHESIS OF THE COUPLING MATRIX 39

Y21(s) =
N∑
k=1
r(k)21
s− jωk=
N∑k=1
r(k)21
∏Ni=1,i6=k(s− jωi)
∏Ni=k s− jωk
(2.77)
(2.77) shows that the coefficient corresponding to sN−1 of the numerator isN∑k=1
r(k)21 . Since nfz < N − 1, this coefficient must be zero:
N∑
k=1
r(k)21 = 0 (2.78)
It is shown in classical realization theory that if a transfer function Y has simple
poles and thus admits an expansion as (2.73), the residues verify ([Kail 80],p.349):
N∑
k=1
rank(R(k)) = N (2.79)
This is equivalent to:
∀k, rank(R(k)) = 1⇒ det(R(k)) = 0 (2.80)
Summary of the Obtained Properties of Y
The admittance matrix Y (s) of a filter can be obtained by transforming S(s)
using the Cayley transform ((2.61)). In the case of a passive and loss-less filter
with maximally N − 2 finite transmission zeros, Y (s) admits a partial fraction
expansion of the form (2.73), where the residues:
R(k) =
[r
(k)11 r
(k)12
r(k)12 r
(k)22
](2.81)
verify the following properties:
r(k)11 , r
(k)22 , r
(k)12 ∈ R
r(k)11 ≥ 0 and r
(k)22 ≥ 0
r(k)11 r
(k)22 − (r
(k)12 )2 = 0
N∑k=1
r(k)12 = 0
(2.82)
40 CHAPTER 2 NARROW-BAND BANDPASS FILTER DESIGN BASED ON COUPLING MATRIX THEORY

2.7.2 MINIMAL REALIZATION OF Y
If Y is a proper rational matrix, then it admits a realization. In this section we
construct a realization of Y (s), (AY ,BY ,CY ,DY ) that verifies AY = AtY and
BY = CtY . Moreover the size of AY is equal to N ×N .
The degree of a realization (AY ,BY ,CY ,DY ) is defined as the size of the matrix
AY . We define the McMillan degree as the minimum of the degree of all possible
realizations of Y . If (AY ,BY ,CY ,DY ) is a realization of Y it is minimal if and
only if its degree is equal to the McMillan degree of Y [Kail 80].
If (A(1),B(1),C(1),D(1)) and (A(2),B(2),C(2),D(2)) are two minimal realiza-
tions of the same proper rational matrix, there exists a unique invertible matrix
P such that:
A(2) = P−1A(1)P
B(2) = P−1B(1)
C(2) = C(1)P
D(2) = D(1)
(2.83)
This means that once we find a minimal realization we can transform it to any
other minimal realization. In the case where a rational matrix has simple poles,
Gilbert’s realization is a minimal realization for which the system matrix is
diagonal. We now apply Gilbert’s method [Gilb 63] to the admittance matrix
Y found in (2.62).
Section 2.7.1 shows that Y admits the following expansion:
Y =
N∑
k=1
R(k)
s− jωk=
N∑
k=1
[r
(k)11 r
(k)12
r(k)21 r
(k)22
]
s− jωk(2.84)
where
r(k)11 r
(k)22 − (r
(k)12 )2 = 0 (2.85)
This means that Rk can be written as
2.7 SYNTHESIS OF THE COUPLING MATRIX 41
Rk = CkBk =
r(k)12√r(k)22√r
(k)22
[r(k)12√r(k)22
√r
(k)22
](2.86)
Remark that Ck = Btk. If we now write Cd and Bd as the concatenation of Ck
and Bk respectively, we can rewrite Y ((2.84)) as:
Y =
r(1)12√r(1)22
r(2)12√r(2)22
. . .r(N)12√r(N)22√
r(1)22
√r
(2)22 . . .
√r
(N)22
jω1 0 . . . 0
0 jω2 . . . 0...
. . ....
0 . . . 0 jωN
r(1)12√r(1)22
√r
(1)22
r(2)12√r(2)22
√r
(2)22
......
r(N)12√r(N)22
√r
(N)22
= Cd(sIN −Ad)−1Bd
(2.87)
The corresponding N + 2 coupling matrix is (2.59):
Md =
1 jr(1)12√r(1)22
jr(2)12√r(2)22
. . . jr(N)12√r(N)22
0
jr(1)12√r(1)22
−jω1 0 . . . 0 j
√r
(1)22
jr(2)12√r(2)22
0 −jω2 . . . 0 j
√r
(2)22
......
. . ....
jr(N)12√r(N)22
0 0 . . . −jωN j
√r
(N)22
0 j
√r
(1)22 j
√r
(2)22 . . . j
√r
(N)22 1
(2.88)
The coupling matrix Md is better known as the transversal N + 2 coupling
matrix and (2.88) is the same as the relation found in [Came 03]. Remark that
Md is not unique. If the ordering of the poles changes, Md changes as well
without affecting Y .
Finally note that due to (2.78) and (2.85), we have that:
42 CHAPTER 2 NARROW-BAND BANDPASS FILTER DESIGN BASED ON COUPLING MATRIX THEORY

CdBd = BtdBd =
N∑k=1
r(k)11 0
0N∑k=1
r(k)22
(2.89)
which also shows that the columns of Bd are orthogonal and their norms are
equal toN∑k=1
r(k)11 and
N∑k=1
r(k)22 respectively.
2.7.3 ARROW FORM OF THE N ×N COUPLING MATRIX
It can be shown that if a matrixAr is a real symmetric matrix of sizeN×N , there
exists an orthogonal transformation Pf (Pf = P tf ) such that P−1
f ArPf = Af
has the arrow form [Seyf 98]:
Af =
∗ ∗ (0) ∗
∗ . . .. . .
...
(0). . .
. . . ∗∗ . . . ∗ ∗
(2.90)
Where all the entries of Af must be zero except for those on the diagonal,
the first upper-diagonal, the first lower-diagonal, and those in the last row and
column. If all of the elements lower-diagonal are non zero the transformation
Pf is unique up to sign changes, meaning that Af is unique up to sign changes
and thus is a canonical form [Seyf 07]. The first and the last column of the
transformation matrix Pf are chosen to be the normalized first and last column
of Bd. The vectors are normalized by dividing each element by the 2-norm of
the vector. Applying transformation Pf to the Gilbert realization (Ad,Bd,Cd)
yields a canonical realization (Af ,Bf ,Cf ) where
Bf = Ctf =
N∑k=1
r(k)11 0
0 0...
...
0N∑k=1
r(k)22
(2.91)
Remark that other canonical forms exist such as the folded form [Came 99].
2.7 SYNTHESIS OF THE COUPLING MATRIX 43

2.8 Reconfiguration of the Coupling Matrix
Section 2.7 explains how to synthesize a coupling matrix in the arrow form
starting from F ,P and E. Although this form is canonical it is not always
possible to implement it physically, due to its associated coupling topology. The
coupling topology of the filter describes the way that the resonators are coupled
to each other. To make this structure more easy to interpret, we represent
the coupling topology by a coupling graph (Figure 2.14) in this work. In the
case of the arrow form all adjacent resonators are coupled to each other and
every resonator is coupled to the last resonator. In a planar technology such
as a microstrip technology it is not always practically possible to obtain such
an implementation. Therefore the coupling matrix is usually transformed by
similarity transformation to obtain a more practical coupling topology. There
are however limitations: it is impossible to implement an arbitrary filter function
in an arbitrary coupling topology. In this section we list up the conditions that
are necessary to ensure that a certain filter function is compatible with a specific
coupling topology.
Figure 2.14 Coupling graph of the arrow form coupling topology. A black node rep-resents a resonator, the gray nodes represent the source and the loadand a full line represents a coupling. For the arrow form all sequentialresonators are coupled and each resonator is coupled to the last resonator.When a self-coupling is non zero the resonator is presented by a full blacknode, otherwise by a white node.
2.8.1 SHORTEST PATH RULE
For a given topology, define l to be the shortest path length (= number of
connections) between the source and the load in a coupling graph (Figure 2.14).
Physically, l is the number of couplings present between the load and the source.
Theorem 1 (Shortest Path Rule). The maximum number of finite transmission
zeros accommodated by the coupling topology containing N resonators and having
a shortest path length l between the source and the load is N + 1− l.
44 CHAPTER 2 NARROW-BAND BANDPASS FILTER DESIGN BASED ON COUPLING MATRIX THEORY
The proof of the shortest path rule is given in [Amar 99].
The shortest path rule allows to evaluate the number of finite transmission ze-
ros accommodated by a specific coupling topology. When a coupling topology
contains a direct source-to-load coupling MSL, the smallest number of connec-
tions between the source and the load is 1. Thus the shortest path length is 1
(l = 1). In that case the number of finite transmission zeros accommodated by
the coupling topology is N .
In this work we do not synthesize coupling topologies with a direct source-to-
load coupling. In the case of no direct source-to-load coupling, the shortest
possible path between the source and the load in a coupling topology consists
of 3 connections. This occurs when there is a coupling between the input and
the output resonator. In that case the shortest path consists of one source-
to-resonator coupling MS1, one inter-resonator coupling M1N and one load-
to-resonator coupling MNL, which makes that the shortest path length is 3.
Therefore the maximal number of finite transmission zeros accommodated by
the filters in this work is N − 2.
2.8.2 COMPATIBILITY BETWEEN THE FILTER RESPONSE AND THE COUPLING TOPOL-
OGY
Two filter responses are said to be part of the same class of filter responses
if they have the same order N , the same number of finite transmission zeros
nfz and their frequency responses are both symmetrical or both asymmetrical
with respect to the center frequency [Seyf 07]. N , nfz and the fact whether the
response is symmetrical or asymmetrical sets the number of degrees of freedom
that can be used in the filter response. We call this number the dimension
of the class. For a filter response it is possible to determine the number of
real independent parameters that define P and F . This number is exactly the
number of degrees of freedom that can be used in the filter response. We now
determine the dimensions of the general class of symmetric and asymmetric filter
responses having an order N and nfz finite transmission zeros.
For an asymmetric filter response of order N having nfz finite transmission zeros
we can choose N complex reflection zeros (yielding N complex coefficients of F
and thus 2N independent parameters). Due to its para-conjugated nature the
coefficients of P alternate between purely real and purely imaginary numbers.
Since there are nfz finite transmission zeros, P has nfz + 1 independent real
coefficients only. Therefore, the dimension of the general class of asymmetric
filter characteristics of order N having nfz finite transmission zeros is 2N +
2.8 RECONFIGURATION OF THE COUPLING MATRIX 45

nfz + 1.
For symmetric filter response characteristics, the coefficients of F must be real.
Therefore, F has N independent real coefficients. Since the transmission zeros
are also symmetric with respect to the center frequency, P is an even polynomial
and thus nfz is even as well resulting innfz
2 degrees of freedom. The dimension of
the class of symmetric filter responses of order N having nfz finite transmission
zeros therefore is N +nfz
2 + 1.
In order for a coupling topology to accommodate for a class of filter responses,
the number of independent coupling parameters of the coupling topology must
at least be equal to the dimension of the filter responses. If these numbers are
equal, the realization problem has a finite number of solutions this includes the
possibility that no solution exists [Seyf 07].
Compatibility between Class of Responses and the Arrow Form
Topology
The arrow form topology (Figure 2.14) has N self-couplings Mkk, N −1 sequen-
tial couplings Mk(k+1) (k 6= N), N − 2 cross-couplings between each resonator
and resonator N and two input and output couplings. This results in 3N − 1
coupling parameters in total. Since the first resonator is coupled to the last
resonator and there is no direct source-to-load coupling, the shortest path rule
says that there can be N − 2 finite transmission zeros. The dimension of the
class of asymmetric filter responses of order N , having N − 2 transmission zeros
is also 2N + N − 2 + 1 = 3N − 1. If the shortest path enlarges by eliminating
couplings to resonator N , the number of admissible finite transmission zeros
decreases. If we eliminate all couplings MkN , the shortest path becomes N − 1
and thus we have no more finite transmission zeros. This corresponds to the
classical Chebyshev response, where only sequential couplings are present.
It is shown [Bell 82] that coupling topologies where Mkl = 0 if k + l is even,
are symmetric. In the case of the arrow form, this means that all self-couplings
Mkk and every second cross-coupling to the last resonator become zero. If N
is even this means that each element MkN is zero if k is even, yielding N−22
non-zero cross-coupling. The number of non-zero elements in the arrow form is
N − 1 + N−22 + 2, which corresponds to the dimension of the class of (N,N − 2)
symmetric filter responses. In the case where N is odd, each element MkN is zero
if k is odd. This means that the shortest path is enlarged by one, yielding only
N − 3 transmission zeros (which is consistent with the fact the zeros are located
symmetrically with respect to the center frequency). The number of non-zero
46 CHAPTER 2 NARROW-BAND BANDPASS FILTER DESIGN BASED ON COUPLING MATRIX THEORY

elements in this case is N − 1 + N−32 + 2, which corresponds to the dimension of
the class of (N,N − 3) symmetric filter responses (where N is odd).
Finally note that a coupling topology is said to be canonical for a class of fil-
ter responses if it is unique and has exactly the same number of independent
parameters as the dimension of the class [Seyf 07].
2.8.3 RECONFIGURATION TO A GENERAL COUPLING TOPOLOGY
In this work we focus on the class of topologies made of cascaded triplets and
quadruplets. For this coupling topologies, the compatibility condition given in
Section 2.8.2 is sufficient to guarantee the existence of a solution of the re-
alization problem. In the case of cascaded triplet and quadruplet topologies
multiple solutions exist. Reconfiguring a coupling matrix to a desired coupling
topology is also called coupling matrix reduction, since the process eliminates
certain couplings. Various approaches, based on optimization have been pro-
posed to solve the reduction problem [Atia 98; Amar 00b]. The main drawback
of these methods is that they do not necessarily yield all the possible solutions.
Therefore a procedure that is based on Groebner basis and homotopy tech-
niques has been developed. This method solves the underlying non-linear set
of equations to yield all of the possible solutions for all of the relevant topolo-
gies [Came 07a; Came 05]. This technique has been implemented in the Matlab
toolbox DEDALE-HF [Seyf 00], which we use to reconfigure the coupling matrix
here.
2.8 RECONFIGURATION OF THE COUPLING MATRIX 47
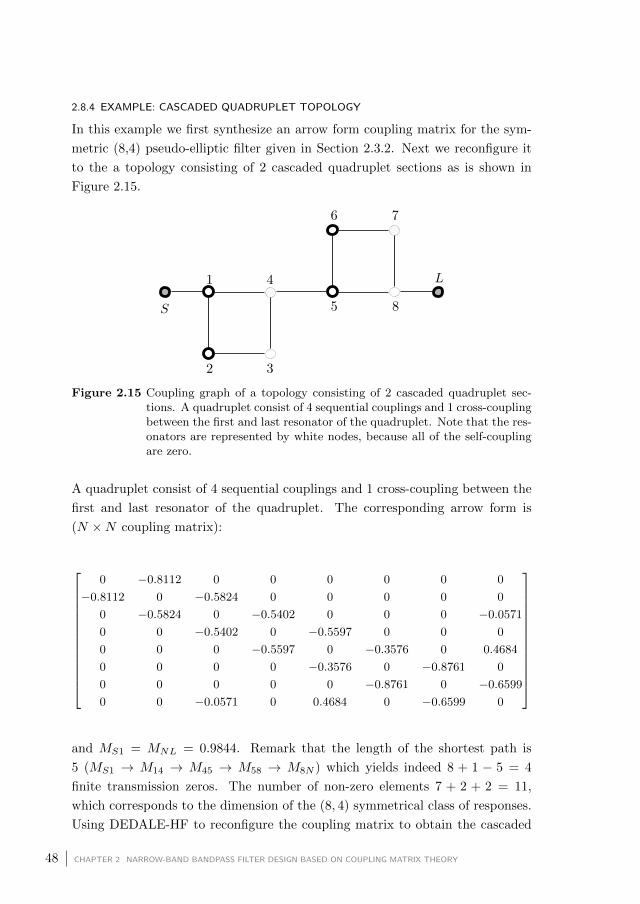
2.8.4 EXAMPLE: CASCADED QUADRUPLET TOPOLOGY
In this example we first synthesize an arrow form coupling matrix for the sym-
metric (8,4) pseudo-elliptic filter given in Section 2.3.2. Next we reconfigure it
to the a topology consisting of 2 cascaded quadruplet sections as is shown in
Figure 2.15.
Figure 2.15 Coupling graph of a topology consisting of 2 cascaded quadruplet sec-tions. A quadruplet consist of 4 sequential couplings and 1 cross-couplingbetween the first and last resonator of the quadruplet. Note that the res-onators are represented by white nodes, because all of the self-couplingare zero.
A quadruplet consist of 4 sequential couplings and 1 cross-coupling between the
first and last resonator of the quadruplet. The corresponding arrow form is
(N ×N coupling matrix):
0 −0.8112 0 0 0 0 0 0
−0.8112 0 −0.5824 0 0 0 0 0
0 −0.5824 0 −0.5402 0 0 0 −0.0571
0 0 −0.5402 0 −0.5597 0 0 0
0 0 0 −0.5597 0 −0.3576 0 0.4684
0 0 0 0 −0.3576 0 −0.8761 0
0 0 0 0 0 −0.8761 0 −0.6599
0 0 −0.0571 0 0.4684 0 −0.6599 0
and MS1 = MNL = 0.9844. Remark that the length of the shortest path is
5 (MS1 → M14 → M45 → M58 → M8N ) which yields indeed 8 + 1 − 5 = 4
finite transmission zeros. The number of non-zero elements 7 + 2 + 2 = 11,
which corresponds to the dimension of the (8, 4) symmetrical class of responses.
Using DEDALE-HF to reconfigure the coupling matrix to obtain the cascaded
48 CHAPTER 2 NARROW-BAND BANDPASS FILTER DESIGN BASED ON COUPLING MATRIX THEORY

quadruplet topology yields 2 possible solutions:
0 0.7425 0 −0.3269 0 0 0 0
0.7425 0 0.7917 0 0 0 0 0
0 0.7917 0 0.4522 0 0 0 0
−0.3269 0 0.4522 0 0.5265 0 0 0
0 0 0 0.5265 0 0.5116 0 −0.1567
0 0 0 0 0.5116 0 0.6852 0
0 0 0 0 0 0.6852 0 0.7960
0 0 0 0 −0.1567 0 0.7960 0
and
0 0.7960 0 −0.1567 0 0 0 0
0.7960 0 0.6852 0 0 0 0 0
0 0.6852 0 0.5116 0 0 0 0
−0.1567 0 0.5116 0 0.5265 0 0 0
0 0 0 0.5265 0 0.4522 0 −0.3269
0 0 0 0 0.4522 0 0.7917 0
0 0 0 0 0 0.7917 0 0.7425
0 0 0 0 −0.3269 0 0.7425 0
The fact that there are 2 solutions can be interpreted as follows; each quadru-
plet creates a pair of transmission zeros that is symmetric with respect to the
center frequency. There are 2 ways of doing this. In the first solution the first
quadruplet creates the (-1.2,1.2) pair and the second one the (-1.5,1.5) pair. For
the other solution it is the other way around, the pairs are inverted.
2.8 RECONFIGURATION OF THE COUPLING MATRIX 49


3Physical Implementation of the Coupling Matrix in Microstrip Technol-
ogy
This chapter introduces a method to obtain initial values for the physical param-
eters of the actual microwave filter that is to be realized. The idea is to select the
physical dimensions of the filter such that coupling matrix of the actual filter is
close to the ideal or target coupling matrix. The dimensioning method described
in this chapter first divides the filter into building blocks. It dimensions these
blocks separately and finally merges them to obtain the complete filter. This
method is applicable to a general physical realization, but in this work we focus
on microstrip filters.
This chapter first introduces the microstrip transmission line structure. Sec-
tion 3.2 summarizes some important characteristics of the microstrip line. Sec-
tion 3.3 introduces the half-wavelength or λ2 resonators, that are used to realize
the filters. Full wave electromagnetic (EM) field solvers are intensively used to
investigate the behavior of coupled-resonator structures and to design the filters.
Section 3.4 discusses the use of the EM-solvers and their simulation settings.
Section 3.5 explains the dimensioning method for microstrip resonators in de-
tail. Finally Section 3.6 applies the method to design a fourth order quadruplet
square-open-loop resonator (SOLR) filter.
3.1 Introduction
In this chapter we explain how to obtain initial values for the physical parameters
of the actual microwave filter obtained from the design before. To physically im-
plement the coupling matrix obtained in Chapter 2, the layout of the microwave
resonators is selected to correspond to the coupling topology. Moreover the res-
onators are dimensioned to have the desired frequency offset with respect to the
center frequency of the prototype filter and the input/output and inter-resonator
51

distance is selected to approximate the ideal coupling as closely as possible. The
dimensioning method described in this chapter divides the filter into building
blocks consisting of individual or pairs of resonators. Next, it dimensions these
blocks separately and finally merges them to obtain the complete filter. There-
fore it is sometimes referred to as the ’divide and conquer strategy’ [Came 07b].
The building blocks used to represent coupled resonator filters are typically the
input/output resonator and sections consisting of 2 coupled resonators. The
dimensioning of each individual block uses so called design curves, which relate
the physical parameters to the coupling parameters [Pugl 00; Pugl 01].
This dimensioning method has been applied to several types of physical coupled
resonator filters such as waveguide filters, dielectric resonator filters, supercon-
ducting filters and microstrip filters [Hong 01; Came 07b]. In this work we use
microstrip filters.
For convenience of the reader and to clarify the notation, we first introduce the
microstrip transmission line structure [Fook 90; Gupt 79]. Section 3.2 summa-
rizes some important characteristics of the microstrip line used in the remainder
of the text such as the characteristic impedance and the effective dielectric con-
stant. Section 3.2.1 gives more details about the loss mechanisms present in
microstrip lines. Since the microstrip filters are often placed in a metal box,
Section 3.2.2 discusses the effect of metallic housing on the properties of the
microstrip structure.
Section 3.2.3 focuses on the electromagnetic coupling that occurs between 2
microstrip lines. This effect is used to physically implement the inter-resonator
coupling. Section 3.3 introduces the half-wavelength or λ2 resonators [Matt 64],
which are used in this work. Various types of λ2 resonators can be found in the
literature such as hairpin and square-open-loop resonators (SOLR) [Hong 96].
In the remainder of this work EM field solvers are intensively used to investigate
the behavior of coupled-resonator structures and to design the filters. Two
different EM-solvers are used: ADS Momentum [ADS 14] and CST Microwave
Studio [CST 15]. Section 3.4 discusses shortly the properties of both EM-solvers
and describes the simulation settings as were used in this work. These setting
have proven to be very important to obtain accurate, repeatable simulations.
Section 3.5 explains the generation of the design. It is based on a lumped
equivalent model of the microwave building blocks. This model allows to relate
the S-parameters of the block to the coupling parameter. This relationship is
then used to extract the coupling parameter of such a building block starting
52 CHAPTER 3 PHYSICAL IMPLEMENTATION OF THE COUPLING MATRIX IN MICROSTRIP TECHNOLOGY

from the simulated S-parameters.
To obtain a design curve for a block, the physical parameters are varied in
the region of interest and in a number of well-chosen values the corresponding
microwave structure is simulated. For each value the coupling parameters is
extracted. Linking these coupling parameters to the physical design parameters
eventually yields the design curves [Swan 07b].
Section 3.5 illustrates this for the inter-resonator coupling between square-open-
loop resonators and for the input and output coupling realized by a SOLR with
tapped feeding line [Hong 01].
Section 3.6 uses the design curves to obtain initial dimensions for a forth order
quadruplet square-open-loop resonator (SOLR) filter [Hong 96].
3.2 Microstrip Structure
A microstrip structure consists of a metal strip of width W and thickness t
(conducting line) lying on a dielectric substrate of thickness h batched by a
conducting ground plane (Figure 3.1 and Figure 3.2). The relative permittivity
of the substrate is εr. The inhomogeneity of the medium (air-dielectric) around
the line can be described as a shift of εr, εre which is called the effective dielectric
constant [Fook 90]. Due to the air-dielectric interface, the waves are no longer
perfectly transverse but also have a longitudinal component [Gupt 79]. There-
fore the microstrip line does not support a transverse electromagnetic (TEM)
propagation mode. However, when the wavelengths are significantly smaller
than W and h, the transverse components are dominant resulting in quasi-TEM
propagation. For practical frequencies, the waves are considered to be TEM.
This is called the quasi-TEM approximation. Figure 3.2 shows the distribution
of the electric and magnetic field in the cross-section of microstrip line. In what
follows we will briefly discuss how some important characteristics of microstrip
line can be analyzed and synthesized as a function of the geometrical and sub-
strate parameters. Note that we assume that the substrate is loss-less and the
metal is a perfect conductor.
Several analysis methods exist to determine the characteristic impedance Zc and
effective dielectric constant εre as a function of the substrate material properties
εr and the dimensions W , h and t of the microstrip line. As the analysis used
here neglects the presence of the longitudinal components of the waves (quasi-
TEM approximation), these methods are referred to as the quasi-static analysis
[Gupt 79]. A more rigorous full-wave analysis methods exist that take into
3.2 MICROSTRIP STRUCTURE 53

Figure 3.1 Configuration of a microstrip line.
Figure 3.2 Cross section of a microstrip line and the quasi-TEM field distribution.
account the non-TEM nature [Gupt 79]. The microstrip filters used in this
work operate at frequencies for which the quasi-TEM approximation holds. The
quasi-static analysis expresses the characteristics of the microstrip line as:
εre =CdCa
(3.1)
Zc =1
c√CaCd
(3.2)
where Cd is the per unit capacitance when the dielectric is present, Ca is the
per unit capacitance when the dielectric is replaced by air and c is the phase
velocity of the wave in free space ( c ≈ 3 × 108 ms ). For very thin strip lines
(t → 0), empirical formulae exist that express Zc and εre as a function Wh and
εr [Hamm 80]. Formulae taking into account the finite thickness of the strip
also exist [Bahl 77]. The effect of the strip thickness on Zc and εre is however
small for small values of th which is the case for the PCB based filters that
are considered in this text. The guided wavelength of a quasi-TEM wave in a
microstrip line for a frequency f is:
λg =λ0√εre
(3.3)
where λ0 = cf is the wavelength in free space. The associated propagation
constant and phase velocity are:
54 CHAPTER 3 PHYSICAL IMPLEMENTATION OF THE COUPLING MATRIX IN MICROSTRIP TECHNOLOGY

β =2π
λg(3.4)
vp =Ω
β(3.5)
where Ω = 2πf . The electrical length θ of a microstrip line is defined as:
θ = βl (3.6)
where l is the physical length of the line. These characteristics are important to
dimension the half-wavelength resonators.
3.2.1 LOSSES IN MICROSTRIP STRUCTURES
Microstrip losses are mainly caused by 2 loss mechanisms: conductor loss and
substrate loss [Gupt 79]. For lossy microstrip lines, the propagation constant
γ = α + jβ is a complex number. The real part of this constant α is called the
attenuation constant and the imaginary part corresponds to β (3.4). The attenu-
ation constant is the sum of the attenuation constant of each loss mechanism and
it is usually expressed in dB per unit length [Puce 68; Denl 80]. The conductor
loss attenuation is due to the skin-effect and the dielectric attenuation can be
calculated using the loss tangent (tan δ) of the dielectric substrate. Because the
microstrip line is a semi-open structure, there are also radiation losses. These
losses depend on the shape of the microstrip structure and are due to microstrip
discontinuities such as corners, bends and variation line widths [Denl 80].
3.2.2 HOUSING EFFECTS
Microstrip filters are often enclosed by a metallic housing. The presence of the
housing affects the values of εre and Zc. The effect of the housing decreases with
the distance between the sides of the enclosing box and the microstrip structure.
As a rule of thumb the effect can be neglected when the side walls are at a
distance of 5h and the conducting top at a distance 8h of the microstrip filter
[Hong 01], where h is the height of the dielectric substrate.
3.2.3 COUPLED MICROSTRIP LINES
When 2 microstrip lines of width W are at a distance d from each other, proxim-
ity coupling occurs through the fringe fields [Garg 79]. A coupled line structure
3.2 MICROSTRIP STRUCTURE 55

supports 2 quasi-TEM coupling modes (Figure 3.3). When the voltages on each
line have the same signs, the even mode is excited and there is an electric wall
at the symmetry plane (Figure 3.3a). When the voltages have opposite sign,
the odd mode is excited and there is a magnetic wall at the symmetry plane
(Figure 3.3b).
In general the 2 modes occur at the same time [Hong 01]. However the cor-
responding characteristic impedance and effective dielectric constant slightly
differ for the 2 modes. Expressions for the even and odd mode characteristic
impedances and effective dielectric constants can be found in [Garg 79; Kirs 84].
This coupling mechanism is used to implement the coupling between the mi-
crowave resonators. In Section 3.5 we discuss the relation between the geomet-
rical parameters of the coupled resonator structure (for example the distance
between resonators) and the inter-resonator coupling.
(a) Field distribution for the even quasi-TEM mode.
(b) Field distribution for the odd quasi-TEM mode.
Figure 3.3 Cross section of 2 coupled microstrip lines of equal width separated by adistance d.
3.3 Half-Wavelength (λ2
) Resonators
There are various ways to construct microwave resonators using microstrip struc-
tures. In this work we use transmission line resonators whith electrical length
θ = π. This corresponds to a physical length which is equal to half of the
guided wavelength at the corresponding resonant frequency fres (3.6) [Matt 64;
Poza 98; Hong 01]. Therefore such a resonator is also called a λ2 resonator. In
the vicinity of fres, such a resonator behaves equivalently to a parallel LC-
resonator [Matt 64]. This equivalence however only holds at fres and in a small
neighborhood set by the steepness of the resonators. Remember that, unlike
lumped LC-resonators, λ2 resonators resonate at all integer multiples of fres.
A well-known example of a half-wavelength resonator is the open ended simple
56 CHAPTER 3 PHYSICAL IMPLEMENTATION OF THE COUPLING MATRIX IN MICROSTRIP TECHNOLOGY

microstrip line resonator of lengthλg2 , which is used to implement parallel-
coupled half-wavelength resonator filters [Cohn 58]. Note that the length of
these resonators is not exactlyλg2 due to the presence of fringing fields and
length correction empirical formulas exist and are used to compensate this effect.
In order to reduce the occupied surface or implement multi-coupled resonator
topologies, variations of the simple line λ2 resonator were introduced such as
the hairpin resonator (Figure 3.4a) [Cris 72] and the square-open-loop resonator
(SOLR) (Figure 3.4b) [Hong 96]. We will use the SOLR λ2 resonator to realize
the resonators in our filters.
(a) Topview of a λ2
hairpinresonator.
(b) Top view of a λ2
square-open-loop resonator(SOLR).
Figure 3.4 Variations of the simple line λ2
resonator.
3.3.1 UNLOADED QUALITY FACTOR
Generally the design of the microwave filters is based on loss-less prototype
networks. In some cases predistortion allows to take the losses of the resonator
into account [Came 07b]. To apply predistortion the unloaded quality factor of
the resonators needs to be known. The unloaded quality factor of resonator Qu
is defined as [Belo 75]:
Qu = ω(average energy stored in resonator)
(average power lost in resonator)(3.7)
The unloaded quality factor of a microstrip resonator is again mainly determined
by 3 loss mechanisms: conductor loss, dielectric loss and radiation loss. The total
quality factor is given by [Belo 75; Gopi 81; Hong 01]:
1
Qu=
1
Qc+
1
Qd+
1
Qr(3.8)
where Qc is the conductor quality factor which is inversely proportional to the
skin effect, Qd is the dielectric quality factor which is inversely proportional to
tan δ, Qr is the radiation quality factor. The latter is defined as the resonant
3.3 HALF-WAVELENGTH (λ2) RESONATORS 57

frequency times the ratio between the average energy stored in the resonator over
the average power that is radiated [Hong 01]. Formulas exist in the literature to
determine these quality factors separately [Belo 75; Gopi 81; Hong 01]. In this
work however the effect of the losses is predicted using full-wave EM-simulators
and considered at the end of the design procedure only. When a resonator is
coupled to an external load with an admittance Ge, the load also affects the
quality factor of the resonator. This is expressed by means of the external
quality factor [Hong 01; Macc 08]:
Qe =Ω0C
Ge(3.9)
where Ω0C is the susceptance slope parameter of the resonator.
3.4 Electromagnetic (EM-) Simulators
Although the quasi-static analysis methods yield accurate expressions for some
important characteristics of the more simple microstrip structures, full-wave
analysis methods are indispensable to predict the behavior of more complex
microstrip structures such as hairpin resonators. In what follows, we use EM
software tools to simulate the S-parameters of various structures such as in-
dividual resonators, coupled resonators and complete filters. In this work we
use 2 different EM-simulators: ADS Momentum [ADS 14] and CST Microwave
Studio [CST 15].
3.4.1 ADS MOMENTUM
ADS Momentum is a 3D planar electromagnetic solver , which means the di-
electric must be layered (sometimes it is referred to as a 2.5D solver). This
solver uses the Method of Moments (MoM) [Harr 96] in the frequency domain
to simulate microstrip structures. An important simulation setting is the mesh
density to obtain accurate results. In this work we choose a mesh density of 60
cells per wavelength of the highest simulated frequency. Although it is possible
to use the the adaptive frequency setting, we usually simulate the structures for
an equidistant frequency grid instead (unless specified differently). We simulate
all the filter structures under the assumption that the ground plane is infinite.
This assumption implies that the groundplane of the fabricated filter must be
large enough (more than 5 times h larger than the edge of the circuit). The
ports are calibrated in 50 Ω and the waves appear as perfect TEM waves at the
ports. These ports are called TML calibrated ports.
58 CHAPTER 3 PHYSICAL IMPLEMENTATION OF THE COUPLING MATRIX IN MICROSTRIP TECHNOLOGY

3.4.2 CST MICROWAVE STUDIO
The Frequency Domain Solver of CST Microwave Studio is a full 3D electromag-
netic solver. In this work we have selected a tetrahedral mesh and the general
purpose solver mode. The solver then calculates the underlying equation for one
single frequency at a time and repeats this for a number of adaptively chosen
frequencies. For each frequency the solution is calculated by an iterative solver (a
solution comprises the field distribution and S-parameters). The full spectrum
in the frequency range of interest is then derived from the simulated frequencies
[CST 15]. CST adaptively changes the mesh until the difference between the
S-parameters of a previous mesh setting and the current mesh setting is lower
than a threshold ∆S. In this work this threshold is chosen to be ∆S = 0.01
and the adaptive meshing is performed at the center frequency of the filter. The
ports are waveguide ports and the S-parameters are normalized to the 50 Ω
reference. The size of the waveguide port is determined using a CST built-in
macro called Calculate port extension coefficient.
This type of solver includes the effects of the presence of a metallic housing. One
of the major advantages of CST Microwave Studio is its ability to compute the
sensitivity of the S-parameters with respect to geometrical parameters such as
the distance between resonators. This feature is intensively used in the novel
tuning method introduced in Chapter 5.
3.5 Generation of the Design Curves
To generate initial values for the physical design parameters of the microstrip
filter, the filter is first divided into building blocks. The design curves relate
the physical dimensions of these building blocks to the corresponding coupling
parameters. The building blocks of coupled-resonator filters are sections of 2
coupled resonators and the input/output resonator which is a coupled feeding
structure. The coupled resonator block is used to implement the inter-resonator
couplings Mkl. The input/output one describes the source-to-resonator coupling
MS1 and load-to-resonator coupling MLN (introduced in Section 2.6). The self-
couplings Mkk represent frequency offsets between the individual resonant fre-
quency of the resonator and the center frequency and are therefore implemented
by adjusting the physical length of the λ2 resonator.
In order to dimension the individual building blocks design curves are generated
by extracting the coupling parameter from the S-parameters of the individual
building blocks. This extraction procedure is based on a lumped-equivalent
3.5 GENERATION OF THE DESIGN CURVES 59

model of the microwave resonator structures. The simplified model allows one
to express the coupling coefficient as a function of certain features of the S-
parameters. To generate the design curves the physical parameters are var-
ied within a well-chosen region and for each set of physical dimensions the S-
parameters are simulated [Swan 07b]. This region must be chosen such that
the desired coupling values fall within it. From the simulated S-parameters the
corresponding coupling coefficient is extracted.
Section 3.5.1 introduces the lumped-equivalent model used for 2 coupled res-
onators in some detail. It also explains how the inter-resonator coupling is
extracted from the amplitude response of the transmission coefficient |S21|. The
extraction procedure is illustrated on three different SOLR coupling structures.
Section 3.5.2 introduces the lumped equivalent model used for a single resonator
coupled to a feeding structure. Next it explains how the input/output coupling
is extracted from the group delay of the reflection coefficient S11. The extrac-
tion procedure is illustrated on a single SOLR which is fed using a tapped-line
[Wong 79]. The design curves obtained in this section are used next in Section 3.6
to dimension a SOLR filter structure.
Note that it is also possible to generate the curves using measured S-parameters.
Moreover it is clear that the curves only provide initial values for the physical
parameters, since they isolate the different building blocks and rely on an ap-
proximation of the behavior of the structure. The curves do not take into account
the effect of the presence of other resonators on the coupling between 2 adjacent
ones. The use of lumped equivalent models also assumes that the coupling is
frequency independent, which is only valid in a narrow-band around the resonant
frequency of the resonators. Finally, note that the design curves describe the
behavior of the coupling between the resonators in the bandpass domain, while
the couplings in the coupling matrix are normalized in the lowpass domain. To
de-normalize them, the inter-resonator coupling must be multiplied by FBW
and the input/output coupling by√FBW (Section 2.6).
3.5.1 INTER-RESONATOR COUPLING
The coupling coefficient k between 2 coupled microwave resonators expresses
the ratio of energy coupled between the resonators and the total energy that is
present in the resonators [Hong 00]. The coupling between microstrip resonators
occurs through the fringing fields (Section 3.2.3). There are 2 different possible
coupling mechanisms namely the electric coupling through the electric fields and
similarly the magnetic coupling through the magnetic fields. Usually both types
60 CHAPTER 3 PHYSICAL IMPLEMENTATION OF THE COUPLING MATRIX IN MICROSTRIP TECHNOLOGY

of coupling occur at the same time. When the electric coupling is dominant,
it is usually referred to as an electric coupling and vice-versa for the magnetic
coupling. When both fields have a similar influence, the coupling is called a
mixed coupling.
In [Hong 01] an equivalent LC model is proposed for each type of coupling. It
is concluded that the expressions of the coupling coefficient kX are the same
for each circuit. kX can be expressed as a function of the 2 frequencies at
which peaks appear in the magnitude of the response |S21| (Figure 3.7). These
frequencies are called the peak frequencies in the remainder of the text. In this
work we use the most general equivalent model, that contains both the electric
and the magnetic coupling and where the resonators are asynchronously tuned.
Figure 3.5 shows the equivalent circuit: resonator 1 that is formed by C1 − Cmand L1−Lm resonates at Ω01 = 1√
L1C1and resonator 2 formed by C2−Cm and
L2 −Lm at Ω02 = 1√L2C2
. The electric coupling is modeled through the mutual
capacitance Cm and the magnetic coupling through the mutual inductance Lm.
Remark that the model shown in Figure 3.5 is simplified by subtracting the
mutual capacitance from C1 and C2 and similarly by subtracting the mutual
inductance from L1 and L2. The coupling coefficient between the resonators can
be expressed in terms of the peak frequencies and resonant frequencies of the
resonators [Hong 00]:
kX = ±1
2
(Ω02
Ω01+
Ω01
Ω02
)√(Ω2
2 − Ω21
Ω22 + Ω2
1
)2
−(
Ω202 − Ω2
01
Ω202 + Ω2
01
)2
(3.10)
where Ω01 and Ω02 are the resonant frequencies of the individual resonators and
Ω1 and Ω2 are the two peak frequencies of the coupled-resonator circuit. In the
case of synchronously tuned resonators (Ω01 = Ω02) (3.10) becomes:
kX = ±Ω22 − Ω2
1
Ω22 + Ω2
1
= ±f2p2 − f2
p1
f2p2 + f2
p1
(3.11)
where fp1 = 2πΩ1 and fp2 = 2πΩ2 are called the peak frequencies. The deriva-
tion of this formulas can be found in [Hong 00].
The sign of the coupling is dependent on the physical coupling structure of
the microwave structure. A positive sign enhances the stored energy where a
negative sign reduces the stored energy in a resonator [Hong 00]. This means the
magnetic and electric couplings have the same effect if they have the same sign
or an opposite effect if they have an opposite sign. The sign of the coupling can
3.5 GENERATION OF THE DESIGN CURVES 61

Figure 3.5 General asynchronously tuned coupled LC-resonator network. The reso-nance frequencies of the resonators are Ω01 = 1√
L1C1and Ω02 = 1√
L2C2.
The electrical coupling is modeled by a mutual capacitance Cm and themagnetic coupling by a mutual inductance Lm. kweak represents the in-put/output coupling.
be determined using the phase response of S21. If the phase of S21 increases for
frequencies lower than the peak frequencies and decreases for higher frequencies,
the coupling has a positive sign. If the phase decreases for frequencies lower
then the peak frequencies and increases for higher frequencies, then the sign is
negative (Section 3.5.1).
At the peak frequencies, peaks appear in the magnitude of the transmission
coefficient |S21| of the coupled-resonator structure when they are loosely coupled
to the input and output. Figure 3.7 shows the typical behavior of |S21| of two
loosely coupled synchronously tuned resonators. To have loosely input/output
coupling, the null between the peaks should be lower -40 dB [Swan 07b]. We
now generate inter-resonator coupling design curves for SOLRs, which we use in
Section 3.6 to dimension a forth order quadruplet filter.
An alternative approach to obtain the inter-resonator coupling coefficients is
to use the eigenmode solver [Came 07b]. Note that not all simulators have an
eigenmode solver. CST Microwave Studio [CST 15] has an eigenmode solver,
but ADS Momentum [ADS 14] does not.
Note that the the derivation of the coupling coefficient expressions assuming
lumped elements (capacitors and inductors) is not exactly congruent with the
synthesis assumptions, where we have assumed ideal frequency-invariant invert-
ers. Therefore Figure 3.5 is suitable for the analysis of the structures but not for
the synthesis. Under the narrow band approximation the synthesized coupling
coefficients only differ slightly from the frequency dependent coupling coeffi-
cients.
62 CHAPTER 3 PHYSICAL IMPLEMENTATION OF THE COUPLING MATRIX IN MICROSTRIP TECHNOLOGY

SOLR Coupling Structures
There are different possible ways to position SOLRs with respect to each other
(Figure 3.6). The way they are positioned and the distance d between them
determines the nature (the sign) and the strength of the coupling. At resonance,
the SOLR has its maximum electric field density around the gap and its max-
imum magnetic field density at the opposite side of the resonator [Hong 96].
Therefore the electric coupling mechanism is dominant when the sides with
the gaps are facing each other (Figure 3.6a). Similarly the magnetic coupling
mechanism is dominant when the sides with gaps are oriented away from each
other(Figure 3.6b). When both resonators are oriented as in Figure 3.6c both
coupling mechanisms have similar effects and therefore this coupling is referred
to as mixed coupling.
(a) Electric coupling
(b) Magnetic coupling
(c) Mixed coupling
Figure 3.6 Different coupled SOLR structures.
Since the coupling is a proximity effect, the distance between the resonator d
affects the inter-resonator coupling most. Therefore this parameter is varied to
generate the design curves.
The resonators in this example are realized on a RO4360 substrate having a
thickness t = 1.27 mm and εr = 6.15. The parameters a = 19.9 mm and g = 1.5
mm are designed such that the resonators resonate at 1 GHz. Figure 3.7 shows
the magnitude of S21 for a structure where the magnetic coupling is dominant
3.5 GENERATION OF THE DESIGN CURVES 63

(blue curve), the electrical coupling is dominant (red curve) and where a mixed
coupling (green curve) is present for an inter-resonator distance d = 1.8 mm.
• Magnetic coupling: The peak frequencies are fp1 = 0.98 GHz and fp2 =
1.024 GHz. Filling these values in in (3.11) yields a coupling value of
kM = 0.0439.
• Electric coupling: The peak frequencies are fp1 = 0.993 GHz and fp2 =
1.009 GHz and thus kE = 0.016. This indicates that the electric coupling
is weaker than the magnetic one.
• Mixed coupling: The peak frequencies are fp1 = 0.986 GHz and fp2 =
1.016 GHz and thus kB = 0.03 which is in between the electric and mag-
netic coupling value.
0.94 0.96 0.98 1 1.02 1.04 1.06
−60
−40
−20
0
Frequency (GHz)
|S21|(
dB
)
Figure 3.7 Magnitude of S21 for SOLR coupled resonator structures: magnetic cou-pling (- - -), electric coupling (—) and mixed coupling (. . .) for a = 19.9mm, g = 1.5 mm and d = 1.8 mm
Figure 3.8 shows that phase responses of the magnetic and mixed coupling struc-
tures behave similarly and have an opposite curvature with respect to the phase
behavior of the electric coupling. This indicates that the signs of the electric
coupling is opposite to that of the mixed and magnetic coupling.
To generate the design curves, the parameter d is varied over an interval [1:0.1:2.5]
mm. As we will see in Section 3.6, this interval is chosen such that the desired
64 CHAPTER 3 PHYSICAL IMPLEMENTATION OF THE COUPLING MATRIX IN MICROSTRIP TECHNOLOGY
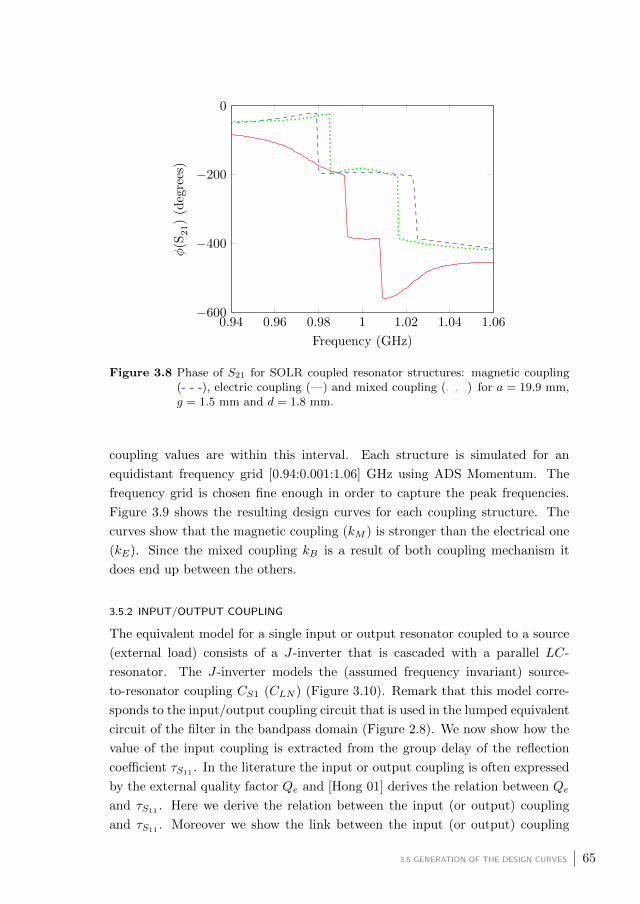
0.94 0.96 0.98 1 1.02 1.04 1.06−600
−400
−200
0
Frequency (GHz)
φ(S
21)
(deg
rees
)
Figure 3.8 Phase of S21 for SOLR coupled resonator structures: magnetic coupling(- - -), electric coupling (—) and mixed coupling (. . .) for a = 19.9 mm,g = 1.5 mm and d = 1.8 mm.
coupling values are within this interval. Each structure is simulated for an
equidistant frequency grid [0.94:0.001:1.06] GHz using ADS Momentum. The
frequency grid is chosen fine enough in order to capture the peak frequencies.
Figure 3.9 shows the resulting design curves for each coupling structure. The
curves show that the magnetic coupling (kM ) is stronger than the electrical one
(kE). Since the mixed coupling kB is a result of both coupling mechanism it
does end up between the others.
3.5.2 INPUT/OUTPUT COUPLING
The equivalent model for a single input or output resonator coupled to a source
(external load) consists of a J-inverter that is cascaded with a parallel LC-
resonator. The J-inverter models the (assumed frequency invariant) source-
to-resonator coupling CS1 (CLN ) (Figure 3.10). Remark that this model corre-
sponds to the input/output coupling circuit that is used in the lumped equivalent
circuit of the filter in the bandpass domain (Figure 2.8). We now show how the
value of the input coupling is extracted from the group delay of the reflection
coefficient τS11. In the literature the input or output coupling is often expressed
by the external quality factor Qe and [Hong 01] derives the relation between Qe
and τS11 . Here we derive the relation between the input (or output) coupling
and τS11. Moreover we show the link between the input (or output) coupling
3.5 GENERATION OF THE DESIGN CURVES 65

1 1.2 1.4 1.6 1.8 2 2.2 2.4
1
3
5
7
·10−2
d (mm)
k
Figure 3.9 Desgin curves relating the inter-resonator coupling kE for the electric cou-pling (+), kM for the magnetic coupling (o) and kB for the mixed coupling(x) to the design parameter d.
and Qe.
The input reflection coefficient is written as a function of the impedance of the
source ZS = 1GS
and the input impedance ZIN of the filter seen from the source
[Poza 98]:
S11 =ZIN − ZSZIN + ZS
(3.12)
where ZIN = 1YIN
. To determine YIN , we obtain Y1 first. If Y1 is the admittance
of the parallel LC resonator (Figure 3.10) and given the resonant frequency
Ω0 = 1√C′1L
′1
we obtain YIN by transformation through the J-inverter CS1:
Figure 3.10 Lumped-equivalent circuit for a single input/output resonator coupledto the a non-ideal source with admittance GS .
66 CHAPTER 3 PHYSICAL IMPLEMENTATION OF THE COUPLING MATRIX IN MICROSTRIP TECHNOLOGY

YIN =C2S1
Y1⇒ ZIN = j
C ′1Ω0
C2S1
(Ω
Ω0− Ω0
Ω) (3.13)
If we write Ω = Ω0 + ∆Ω for a frequency that is assumed to lie in the vicinity
of resonance Ω ≈ Ω0, we approximate ( ΩΩ0− Ω0
Ω ) as:
Ω
Ω0− Ω0
Ω=
(Ω + Ω0)(Ω− Ω0)
ΩΩ0
≈ 2Ω∆Ω
ΩΩ0=
2∆Ω
Ω0
(3.14)
If we now introduce (3.13) in (3.12) using the approximation in (3.14), we obtain:
S11 =GSZIN − 1
GSZIN + 1
=j
Ω0C′1GS
C2S1
∆ΩΩ0− 1
jΩ0C′1GSC2S1
∆ΩΩ0
+ 1
=jX − 1
jX + 1=
1−X2
1 +X2− j 2X
1 +X2
(3.15)
where X =C′1GS∆Ω
C2S1
. The phase of S11 is
φ(S11) = arctan−2X
1−X2(3.16)
The group delay τ is defined as [Poza 98]:
τ = − dφdΩ
(3.17)
We now calculate τS11(Ω0) by deriving (3.16) and evaluating it in Ω0. First we
derive (3.16):
3.5 GENERATION OF THE DESIGN CURVES 67

τS11= − 1
1 + (−2X)2
(1−X2)2
−2(1−X2)− 2X(−2X)
(1−X2)2
GSC′1
C2S1
=(1−X2)2
(1 +X2)2
−2(1 +X2)
(1−X2)2
GSC′1
C2S1
=1
(1 +X2)2
2GSC′1
C2S1
(3.18)
Since X(Ω0) = 0, we have that:
τS11(Ω0) =
2GSC′1
C2S1
(3.19)
Using (2.38) we have that MS1 = CS1√GSC1
is the input-coupling in the lowpass
domain, where C1 = FBWΩ0
2 C ′1 (2.32). Filling this in (3.19) yields:
M′2S1 = M2
S1FBW =4
Ω0τS11(Ω0)(3.20)
where we define M ′S1 = CS1√GSΩ0C′1
as the input coupling in the bandpass domain.
Equation (3.20) shows again that to de-normalize the input (output) coupling
it must be multiplied by√FBW . Note that in the literature the input/output
coupling is often expressed using the external quality factor QEXT [Macc 08].
In the case when a resonator l is coupled to an external load G0 through a
J-inverter J0l, the external quality factor is defined as
QEXT,l =blG0
J20l
(3.21)
where bl is the susceptance slope parameter of the admittance Yl of the resonator:
bl =1
2
∂ Im(Yl)
∂Ω
∣∣∣∣Ω=Ω0
(3.22)
In the case of the input parallel LC-resonator, bl = b1 = Ω0C′
1. If we now
assume that G0 = GS and J0l = CS1 we have:
68 CHAPTER 3 PHYSICAL IMPLEMENTATION OF THE COUPLING MATRIX IN MICROSTRIP TECHNOLOGY

QEXT,1 =Ω0C
′
1GSC2S1
= M′2S1 =
1
M′2S1
=Ω0τS11
(Ω0)
4(3.23)
Expression (3.23) corresponds to the expression found in [Hong 01; Swan 07b]
to extract the quality factor starting from the group delay τS11.
We now apply the extraction method to generate design curves for a SOLR
which is fed using a tapped-line.
Tapped-line Feed SOLR example
A SOLR is usually fed using a tapped-line feeding structure, where the position
of the center of the feed line with respect to the center of the resonators labeled
t mainly affects the input coupling [Wong 79] (Figure 3.11). The width of the
feeding line Wfeed is chosen such that the characteristic impedance of the line
corresponds to the impedance of the source (or the load), which in this case is
50 Ω. The corresponding width of the feed line in the example as used earlier
is Wfeed = 1.48 mm. The derivative of the phase of S11 with respect to the
frequency is approximated by the forward numerical differentiation ∆φ∆ω = φ2−φ1
ω2−ω1.
The structures are simulated for the same frequency range as before, which is
[0.94:0.001:1.06] GHz again using ADS Momentum for values of t within the
interval [7.45:0.01:9.45] mm. These values are chosen to make sure that the
desired input (and output) coupling are within this interval. Figure 3.12 shows
τS11for a = 19.9 mm, g = 1.5 mm and t = 7.95 mm. τS11
(Ω0) is 12.7 ns and
Ω0 = 2π109 rads , which makes that M ′S1 = 0.224. Figure 3.13 shows M ′S1 as a
function of t, the coupling between the source and the resonator increases when
t increases, which is expected and is in line with field density and the impedance
along the resonator.
IN
Figure 3.11 Top-view of the layout of a single SOLR fed using a tapped-line feedingstructure. t denotes the distance between the center of the feed line andthe center of the resonator.
3.5 GENERATION OF THE DESIGN CURVES 69

0.94 0.96 0.98 1 1.02 1.04 1.062
4
6
8
10
12
Frequency (GHz)
τS
11
(ns)
Figure 3.12 τS11 as a function of frequency for a tapped SOLR structure with a = 19.9mm, g = 1.5 mm and t = 7.95 mm.
7.4 7.8 8.2 8.6 9 9.40.18
0.2
0.22
0.24
0.26
0.28
0.3
0.32
t (mm)
Inp
ut
cou
pli
ng
Figure 3.13 Input/output coupling for a tapped SOLR structure with a = 19.9 mm,g = 1.5 mm and t in the interval [7.45:0.01:9.45] mm.
3.6 Initial Dimensioning of a Single Quadruplet SOLR Filter
In this section we use the design curves generated in Section 3.5.1 to dimension
a fourth order SOLR quadruplet filter. The filter is designed to have a center
frequency fc = 1 GHz, a FBW = 0.05 and a RL = −20 dB and 2 finite TZs at
ω = ±1.4. We first synthesize the ideal coupling matrix in the lowpass domain
70 CHAPTER 3 PHYSICAL IMPLEMENTATION OF THE COUPLING MATRIX IN MICROSTRIP TECHNOLOGY

using the techniques described in Chapter 2. The ideal N + 2 coupling matrix
is called Mid and is shown below:
Mid =
0 1.0123 0 0 0 0
1.0123 0 0.7787 0 −0.4286 0
0 0.7787 0 0.8612 0 0
0 0 0.8612 0 0.7787 0
0 −0.4286 0 0.7787 0 1.0123
0 0 0 0 1.0123 0
To implement the coupling matrix, it must be de-normalized. Hence, the inter-
resonator coupling must be multiplied by FBW and the input/output couplings
by√FBW yielding:
Mdenorm =
0 0.2263 0 0 0 0
0.2263 0 0.0389 0 −0.0214 0
0 0.0389 0 0.0431 0 0
0 0 0.0431 0 0.0389 0
0 −0.0214 0 0.0389 0 0.2263
0 0 0 0 0.2263 0
(3.24)
In the ideal coupling matrix, the inter-resonator coupling M14 has an opposite
sign to that of the sequential couplings. Therefore we implement M14 using
the electric coupling structure shown in Figure 3.6a. Moreover the couplings
M12 = M34. To impose this equality we then implement these couplings using
a mixed coupling structure (Figure 3.6c). Finally we implement M24 using the
magnetic coupling structure (Figure 3.6b). Figure 3.14 shows the top-view of the
physical layout of the filter. Table 3.1 contains the initial geometrical dimensions
obtained using the design curves. Figure 3.15 shows the magnitude responses
in the bandpass domain for the filter with the initial dimensions. Figure 3.16
compares the simulated response to the ideal one obtained from the coupling
matrix Mid.
Clearly, the filter response is reasonably close to the ideal one, however there is
still an offset and room for improvement. The TZs have a frequency offset and
quality factor shift with respect to the ideal ones, the bandwidth is slightly larger
than the ideal one and not all of the reflection zeros appear. It is not surprising
that response does not perfectly match the ideal response, as the design curves
3.6 INITIAL DIMENSIONING OF A SINGLE QUADRUPLET SOLR FILTER 71

Figure 3.14 Top-view of the layout of a fourth order SOLR quadruplet filter.
Physical design parameter Initial value (mm)wfeed 1.48tin = tout 7.95g1 = g2 = g3 = g4 1.5a 19.9w 1d12 1.45d23 1.75d34 1.45d14 1.45
Table 3.1 Initial values for the physical design parameters of the SOLR quadrupletfilter.
are based on the approximation that does not take into account the effects of
the loading of other resonators on the coupling parameters. Moreover parasitic
couplings may be present in the actual microwave filter. To assess the difference
in some more detail, knowledge about the implemented (actual) coupling matrix
is helpful. It enables a designer to tune or optimize the geometrical parameters
or at least helps to diagnose the source of the error on the implemented coupling
parameters. In the next chapter we will explain how to extract the implemented
coupling matrix starting from the simulated full-wave response. Later we use
this extraction method to optimize the filter response.
72 CHAPTER 3 PHYSICAL IMPLEMENTATION OF THE COUPLING MATRIX IN MICROSTRIP TECHNOLOGY
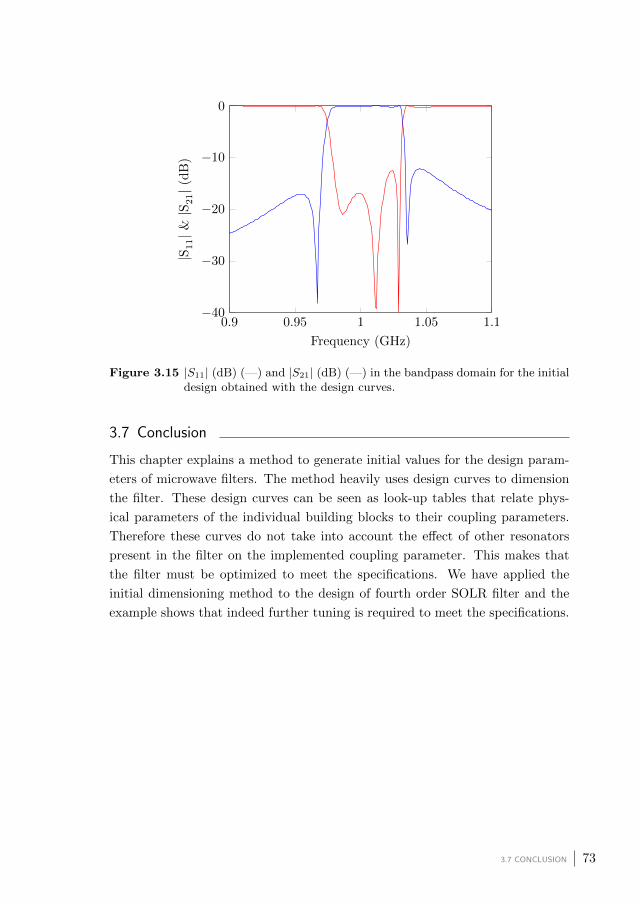
0.9 0.95 1 1.05 1.1−40
−30
−20
−10
0
Frequency (GHz)
|S11|&|S
21|(
dB
)
Figure 3.15 |S11| (dB) (—) and |S21| (dB) (—) in the bandpass domain for the initialdesign obtained with the design curves.
3.7 Conclusion
This chapter explains a method to generate initial values for the design param-
eters of microwave filters. The method heavily uses design curves to dimension
the filter. These design curves can be seen as look-up tables that relate phys-
ical parameters of the individual building blocks to their coupling parameters.
Therefore these curves do not take into account the effect of other resonators
present in the filter on the implemented coupling parameter. This makes that
the filter must be optimized to meet the specifications. We have applied the
initial dimensioning method to the design of fourth order SOLR filter and the
example shows that indeed further tuning is required to meet the specifications.
3.7 CONCLUSION 73

−4 −3 −2 −1 0 1 2 3 4−40
−30
−20
−10
0
ω
|S11|(
dB
)
(a) |S11| (—) for the simulated filter and ideal response (—) and the specifications (-- -).
−4 −3 −2 −1 0 1 2 3 4−40
−30
−20
−10
0
ω
|S21|(
dB
)
(b) |S21| (—) for the simulated filter and ideal response (—) and the specifications (-- -).
Figure 3.16 Comparison between the ideal and simulated response.
74 CHAPTER 3 PHYSICAL IMPLEMENTATION OF THE COUPLING MATRIX IN MICROSTRIP TECHNOLOGY

4Extraction of the Coupling Matrix
This chapter presents a method to extract a coupling matrix starting from the
simulated (or measured) S-parameters of the filter. The S-parameters are first
transformed to the lowpass domain. The extraction method estimates a common
denominator matrix of prescribed McMillan degree N for the S-parameters of
the filter in the lowpass domain after adjusting the reference plane. Next it
synthesizes a coupling matrix in the arrow form. This coupling matrix is then
reconfigured to match the implemented coupling topology. In the case of multiple
solutions, all admissible solutions are determined. The extraction method has
been implemented in the Matlab toolbox PRESTO-HF [Seyf 04], which we use to
extract the arrow form coupling matrix starting from the simulated S-parameters
of the filter. Since we are dealing with non-ideal (real) filters, the simulated data
do not perfectly match the coupling matrix model. By a real filter, we mean
the electromagnetic model of the filter, and not real in the sense that the filter
is manufactured. This makes that the coupling matrix also contains parasitic
couplings. At the end of this chapter we explain how parasitic couplings are
handled and how this affects the reconfiguration of the coupling matrix. The
coupling matrix extraction method is applied to a single and to a cascaded
quadruplet filter.
4.1 Introduction
In filter design it is necessary to extract the arrow form coupling matrix starting
from the simulated or measured S-parameters of the filter. Knowledge of the
extracted coupling matrix allows a designer to diagnose problems if the imple-
mented coupling matrix is too far a way from the ideal target coupling matrix.
This ideal matrix is also called the golden goal. A designer can then correct or
tune the physical dimensions of the filter to bring the coupling matrix closer to
the target one. To be able to tune the physical dimensions of the filter using the
75

extracted coupling matrix, one must be sure to extract the coupling matrix that
is physically implemented. As we have seen in Section 2.8.3 and Section 3.6,
the implemented coupling topology does not always correspond to the arrow
form. Moreover the implemented topology can have multiple mathematically
equivalent solutions leading to a coupling matrix of the desired form. Another
problem is the presence of parasitic couplings. These second order perturbation
effects change the structure of the coupling matrix, hereby modifying the fre-
quency response function (FRF) in a way that is not contained in the golden
goal. In this chapter we explain how we extract the arrow form coupling matrix
starting from simulated (or measured) S-parameters, to reconfigure it to the
target coupling topology and to handle the presence of parasitic couplings. The
procedure used to handle multiple solutions is discussed in the next chapter.
Over the last years several methods to extract the coupling matrix starting from
the S-parameters have been developed in order to tune filters [Hars 01; Hars 02;
Bila 99; Seyf 03; Garc 04; Lamp 04; Hu 13; Hu 14]. These extraction techniques
can roughly be divided in 2 categories:
• Optimization-based methods optimize the coupling matrix parameters to
fit the measured/simulated S-parameters in the lowpass domain [Hars 01;
Hars 02]. These methods yield only one solution by construction. The
solution strongly depends on the initial values for the coupling parameters
that need to be specified by the user. Only one solution is obtained,
even if there are multiple possibilities. Unfortunately, this one solution
does not necessarily correspond to the physically implemented one. A
comparison based on a coupling matrix that is inconsistent with the actual
filter physical dimensions can propose incoherent corrections destroying the
tuning procedure.
• Network-synthesis-based methods first identify the numerator polynomials
of S11 and S21 [Garc 04; Lamp 04] or a rational matrix [Bila 99; Seyf 03;
Hu 13; Hu 14] representing the measured/simulated S-parameters in the
lowpass domain. Next the method synthesizes a coupling matrix starting
from the identified polynomials or the rational form. In the case of coupling
topologies having multiple solutions these methods do not specify which
solution is synthesized.
Since we want to handle coupling topologies supporting multiple solutions, we
use an extraction method of the second category. The rational approxima-
76 CHAPTER 4 EXTRACTION OF THE COUPLING MATRIX

tion used in this work is described in [Seyf 03; Oliv 13] and is based on H2-
approximation [Marm 02]. This method mainly consists of 2 steps:
1. An analytical completion is obtained first to derive a stable and causal
model of very high degree that fits the data.
2. A rational approximation is pursued next that identifies a stable rational
matrix of an a-priori and imposed McMillan degree N .
The method also takes into account the influence of the presence of feeding
or access lines on the filter response and automatically adjusts the reference
plane. The method has been implemented in the Matlab toolbox PRESTO-HF
[Seyf 04], which we will use intensively in the remainder of this work. Section 4.3
explains the principles used in the rational approximation method. The main
benefit of this method is that it identifies a stable, causal, rational matrix of
fixed MacMillan degree N , where N corresponds to the order of the lowpass
equivalent filter or the number of resonators present in the physical filter. As we
have seen in Section 2.7.2, this is a necessary condition to be able to synthesize
a minimal coupling matrix of size (N + 2)× (N + 2). We now briefly discuss the
differences with the other methods of the second category.
The method described in [Garc 04] is called the Cauchy method. This method
assumes that the Feldtkeller equation (2.17) is valid for the physical filter. The
method first estimates the rational model for the ratio S11
S21. Next it identifies
the numerator of this function as the reflection polynomial and the denominator
as the numerator polynomial of the transmission function. Finally it constructs
the common denominator of the rational S-matrix using the Feldtkeller equa-
tion. One of the drawbacks of this method is that it assumes that the filter
is loss-less, which is not the case in practice. Therefore the method has been
improved to handle lossy data by reformulating the total least-squares problem
without imposing the lossless condition [Lamp 04]. Another approach [Macc 10]
assumes that all of the resonators have the same unloaded quality factor Qu.
This method transforms the S-parameters to a predistorted frequency domain
using the following frequency transformation:
ω =1
FBW(
1
Qu+ j(
f
fc− fcf
)) (4.1)
Next it applies the Cauchy method in the predistorted frequency domain, thereby
avoiding all of the problems related to the synthesis of lossy networks such
4.1 INTRODUCTION 77

as complex couplings. This method heavily relies on the assumption that the
unloaded quality factor is known and equal for all resonators.
The method described in [Hu 13; Hu 14] estimates a rational matrix for the
Y -parameters using the vector fitting (VF) algorithm [Gust 99; Gust 06]. The
VF algorithm estimates a pole-residue form in least-squares sense on the data
by iteratively re-locating the position of the poles. The benefit of the methods
described above is that they are relatively simple to implement and yield accurate
rational models.
The main drawback of the methods described in [Lamp 04; Hu 13; Hu 14] is
the fact that the identified rational matrix is not imposed to have a McMillan
degree N . This is a problem since the methods next synthesize a coupling matrix
using the method described in [Came 03]. This method [Came 03] is equivalent
to Gilbert’s method [Gilb 63] and thus assumes that the rational matrix is of
fixed McMillan degree N (Section 2.7.2). Applying it to a rational form that
is not of McMillan degree N , introduces an error and results in the estimation
of a coupling matrix that does no longer represent the rational S-matrix. Since
the method used here extracts a rational matrix of McMillan degree N , it can
always be used to synthesize the transversal N + 2 coupling matrix.
The transversal N+2 coupling matrix is first transformed to the canonical arrow
form coupling topology. To enable one to transform the arrow form to the target
coupling topology, both coupling matrices have to have the same number of non-
zero elements as is discussed in Section 2.8.3. Since the filter is not ideal, this
compatibility condition is generally not met. In section Section 4.5, we explain
how to reduce the arrow form matrix (remove the parasitic couplings) such that
it can be transformed to the target coupling topology. The transformation is
done using the Matlab toolbox DEDALE-HF [Seyf 00]. In the case of multiple
solutions, we determine all possible solutions. How to identify the physical
solutions in this set of possibilities is discussed in the next chapter. Section 4.6
explains how the parasitic couplings are taken into account and how they should
be interpreted. Finally the extraction method is applied to two examples: a
single and a cascaded quadruplet filter.
A limitation of the proposed extraction technique is that the model order must
be the same of the synthesized filter N . In the physical device the actual order
is however higher, due to the frequency variation of the couplings, higher order
mode resonances, etc. The effect of these inaccuracies can not be compensated
by including spurious couplings, since this modifies only the number of zeros nfz
as is explained in Section 2.8.
78 CHAPTER 4 EXTRACTION OF THE COUPLING MATRIX

In what follows we first explain how the data is transformed to the lowpass
domain, next the rational approximation and finally the synthesis of the coupling
matrix having the desired coupling topology. Note that Section 4.3 can be seen
as a summary of [Oliv 13] and [Seyf 03].
4.2 Bandpass-to-Lowpass Transformation
The simulated or measured frequencies are transformed to the lowpass domain
using the following transformation:
ωi =2
f2 − f1(fi − f0) =
2
Ω0FBW(Ωi − Ω0) (4.2)
where fi is a simulated frequency in the bandpass domain and ωi is the corre-
sponding normalized frequency in the lowpass domain and Ω is the bandpass
angular frequency. f0 is the center frequency and f1 and f2 are the cut-off fre-
quencies of the passband specified by the frequency template. Since the center
frequency f0 and fractional bandwidth FBW of the filter to be optimized are
not necessarily equal to the ideal f0 and FBW , the passband of the simulated
S-parameters in the lowpass domain does not always lie between [-1,1]. Note
that the transformation given in (4.2) is the same as the one used in Section 2.5
to transform the lumped-equivalent network to the lowpass domain (2.30).
4.3 Rational Approximation and Reference Plane Adjustment of theS-parameters
The extraction method identifies a mathematical model for the simulated S-
parameters of the filter in the lowpass domain:
SSim(jωi) =
[SSim11
(jωi) SSim12(jωi)
SSim21(jωi) SSim22
(jωi)
](4.3)
where i ∈ 1, . . . , nF and nF denotes the number of simulated frequencies. The
mathematical model is denoted as H and has the following form:
H(jω) =1
q(jω)
[e−j(ωα11+β11)p11(jω) e−j(ω
α11+α222 +
β11+β222 )p12(jω)
e−j(ωα11+α22
2 +β11+β22
2 )p21(jω) e−j(ωα22+β22)p22(jω)
]
(4.4)
4.2 BANDPASS-TO-LOWPASS TRANSFORMATION 79

where q is the common denominator polynomial of order N and p11, p12, p21
and p22 are the numerator polynomials of order N . α11 and α22 are real-valued
constants that model the delays introduced by the access (feeding) lines at in-
put and output respectively. β11 and β22 are real-valued constants that model
the frequency shift introduced by the bandpass-to-lowpass transformation (4.2).
Note that (4.4) can also be written as:
[e−j(ωα11+β11) 0
0 e−j(ωα22+β22)
]Srat(jω)
[e−j(ωα11+β11) 0
0 e−j(ωα22+β22)
](4.5)
where the first and last matrix model the access lines and the matrix Srat(jω)
models the filter. The coupling matrix is synthesized starting from the stable
rational matrix Srat of McMillan degree N :
Srat(jωi) =1
q(jωi)
[p11(jωi) p12(jωi)
p21(jωi) p22(jωi)
](4.6)
To have a stable rational approximation of good quality, the algorithm requires
that the S-parameters are known at each frequency ranging from −∞ to +∞(∀ω ∈ R). Therefore the identification method first computes a stable and causal
model of high degree starting from the simulated S-parameters with the delays
removed, this step is called the completion stage. This high degree model thus
describes the behavior of the filter (without access lines) in the lowpass domain
for all frequencies going from −∞ to +∞. Next the rational matrix (of much
lower degree N) is estimated by rational H2 approximation using the high degree
model as an input [Oliv 13; Marm 02].
The method to identify the mathematical model given in (4.4) starting from sim-
ulated S-parameters of the filter in the lowpass domain consists of the following
steps:
1. Completion:
• Estimation of the delays α11 and α22.
• Analytic completion of the simulated S-parameters with delays re-
moved
• Estimation of the frequency shifts β11 and β22.
80 CHAPTER 4 EXTRACTION OF THE COUPLING MATRIX

2. Estimation of the rational matrix Srat starting from the analytic comple-
tion.
4.3.1 DELAY ESTIMATION
The estimation of α11 and α22 relies on the hypothesis that the rational behavior
in (4.4) for frequencies far from the passband are well approximated by the first
few terms of their Taylor expansion at infinity [Seyf 03]. This boils down to
assuming that the rational model of the filter behaves as a low degree polynomial
in 1ω for frequencies far out the passband. To be able to estimate the delays,
the filter must therefore be simulated over a broader frequency band than the
passband of the filter. Consider only the simulated frequencies that are smaller
than −ωc and larger than ωc with |ωc| > 1:
I = ωi, |ωi| ≥ ωc (4.7)
The value of α11 is found by minimizing the least-squares cost function ψ:
ψ(αl) = min(a0,a1,...,anm−1)∈C(nc−1)
∑
ωi∈I
∣∣∣∣nm−1∑
k=0
akωki− SSim11(ωi)e
jωiαl
∣∣∣∣2
(4.8)
For a fixed value of αl, ψ(αl) is minimized in least-squares sense over the coeffi-
cients (a0, a1, . . . , anm−1) ∈ C(nm−1). Since the value of α11 corresponds to the
physical delay, it is possible to determine boundaries for the interval in which α11
is located based on the geometry of the circuit. The function ψ is exhaustively
searched within this interval with a prescribed tolerance on αl. α11 is determined
as the value for which ψ is minimal within the interval.
To determine α22 we proceed in the same way using SSim22instead of SSim11
.
Once α11 and α22 are estimated, we de-embed the delays of simulated S-parameters
as follows:
SCa(jωi) =
[ejωiα11SSim11(jωi) ejωi
α11+α222 SSim12(jωi)
ejωiα11+α22
2 SSim21(jωi) ejωiα22SSim22(jωi)
](4.9)
4.3 RATIONAL APPROXIMATION AND REFERENCE PLANE ADJUSTMENT OF THE S-PARAMETERS 81

4.3.2 ANALYTIC COMPLETION
The completion stage computes a stable and causal high degree order model F
for the de-embedded S-parameters for all frequencies going from −∞ to +∞.
The model is computed starting from the de-embedded S-parameters at the sim-
ulated frequencies in the lowpass domain. The frequency interval corresponding
to the simulated frequency band is denoted as:
J = [min(ωi),max(ωi)] (4.10)
where ωi denotes a simulated frequency in the lowpass domain. For a value
between 2 simulated frequencies SCa is computed by spline interpolation. We
denote the complement of the interval J as:
Jc =]−∞,min(ωi)[ ∪ ] max(ωi),+∞[ (4.11)
We split the frequency span −∞ ≤ ω ≤ +∞ in the partition of J and Jc. For
frequencies in Jc, we model the S-parameters using a low degree polynomial mkl
in 1ω using the same assumption as in Section 4.3.1. SCakl(jω) (the elements
of the matrix SCa labeled k, l ∈ 1, 2) represents the function in J , while
the polynomial mkl(jω) is used for frequencies in Jc. The complete function is
labeled as SCakl(jω)∧mkl(jω). In order to determine mkl we use a cost function
as in (4.8) to estimate the coefficients of mkl(jω), but we also take into account
that F must be causal and stable. Since we want to obtain a stable, causal and
rational model Srat, we first want to have a stable high-order model to prepare
the rational approximation step.
For a rational model the stability and causality properties require that all the
poles are finite and in the open left half plane. The latter is equivalent to the
fact that the function is analytic in the closed right half plane and at infinity.
To properly handle these properties mathematically we embed the rational func-
tions in a larger space of functions which are known to be analytic in the right half
plane: the Hilbert space of analytic functions in the open right half plane. Their
L2(dµ(ω))-norm remains uniformly bounded on vertical lines [Seyf 03; Part 97]
whenever dµ(ω) = dω1+ω2 . This space is a Hardy space of the right half plane and
we denote it as H2µ. The L2(dµ(ω))-norm of a function f is given by:
‖ f ‖2=
∫ +∞
−∞
|f(jω)|21 + ω2
dω (4.12)
82 CHAPTER 4 EXTRACTION OF THE COUPLING MATRIX

We define L2µ as the space of all complex functions defined on the imaginary axis
for which (4.12) is finite. H2µ can be viewed as a subspace of the space L2
µ. If we
define G2µ as the orthogonal complement of H2
µ in L2µ every function f ∈ L2
µ can
be written as the sum of a function in H2µ (the stable part) and a function in G2
µ
(the unstable part) [Seyf 03]. We denote PH2µ(f) as the orthogonal projection
of f on H2µ and similarly PG2
µ(f) as the orthogonal projection of f on G2
µ. This
framework provides us with an interesting tool to estimate the stability and
causality of a function.
The following minimization problem is solved to determine the polynomials
mkl(jω) (k, l ∈ 1, 2):
minmkl
∑
ωi∈I
∣∣∣∣SCakl(jωi)−mkl
(1
jωi
) ∣∣∣∣2
(4.13)
with
mkl ∈ Cnm [X]
‖ PG2µ(SCakl ∧mkl) ‖2≤ Ec
∀ω ∈ Jc, |mkl|2 ≤ 1
(4.14)
Herein PG2µ(SCakl ∧ mkl) is the projection of the completed data on G2
µ and
represents the unstable part of the completed data. Cnc [X] denotes the set of
polynomials with complex coefficients whose degree is smaller or equal to nm. Ec
is an upper bound on the norm of the unstable part of the completed data. The
last expression in (4.14) is an upper bound on the magnitude of the completed
data in Jc, which must be smaller than 1 for ωi ∈ Jc. This optimization problem
has a unique solution unless the set of admissible solutions is empty, hence it is
a convex problem [Seyf 03].
The completed S-matrix is given by:
SCb(jω) =
[(SCa11
∧m11)(jω) (SCa12∧m12)(jω)
(SCa21∧m21)(jω) (SCa22
∧m22)(jω)
](4.15)
Novel approach
In the latest version of PRESTO-HF [Seyf 04], the completion is performed
simultaneously with the determination of the delay τ . We associate a polynomial
pτ to a delay τ where pτ is the minimizer of:
4.3 RATIONAL APPROXIMATION AND REFERENCE PLANE ADJUSTMENT OF THE S-PARAMETERS 83

pτ = arg minp∈P
∫ +∞
−∞
|PG2µ(SSim11(jω)ejωτ ∧ p( 1
jω ))|21 + ω2
dω (4.16)
where P = p is a polynomial in jω; deg p ≤ nc; ∀ω ∈ Jc, |p|2 ≤ 1.
Similarly to what is done Section 4.3.1 (4.16) is scanned for an a-priori defined
number of values of τ within a range that is based on prior knowledge. The
value of τ that results in the smallest discontinuity between the completion and
the data in the interval I (4.7), is chosen equal to the delay α11. To determine
α22 we proceed in the same way using SSim22instead of SSim11
in (4.16). The
completion polynomials pα11and pα22
are improved next using (4.13).
4.3.3 DETERMINATION OF THE FREQUENCY SHIFTS
The determination of the frequency shifts βkl (k, l ∈ 1, 2) is based on the
observation that the behavior of the completed S-matrix SCb must be close to
the behavior of the lumped equivalent lowpass network introduced in Section 2.5.
At an infinite frequency the equivalent network behaves as an open ended circuit
and therefore the S-matrix is equal to the identity matrix of size 2 × 2 I2 at
ω = +∞. The phase of the reflection factors Skk(jω) at both ports is thus 0 for
the lumped equivalent lowpass network. We then determine β11 and β22 to be
equal to the phase of SCb11and SCb22
at ω = +∞ respectively:
β11 = arg(m11(0))
β22 = arg(m22(0))(4.17)
Note that the solutions β11 and β22 are determined up to kπ (k ∈ Z). The
software PRESTO-HF makes an arbitrary choice for the value of k. This choice
can change the sign of the output coupling. It is thus possible to select the
values of β11 and β22 by looking at the sign of the output coupling. The final
completed S-matrix is given by:
SC(jω) =[
ej(ωα11+β11)SSim11 ∧m11( 1ω ) ej(ω
α11+α222 +
β11+β222 )SSim12 ∧m12( 1
ω )
ej(ωα11+α22
2 +β11+β22
2 )SSim21∧m21( 1
ω ) ej(ωiα22+β22)SSim22∧m22( 1
ω )
]
(4.18)
84 CHAPTER 4 EXTRACTION OF THE COUPLING MATRIX

The matrix SC models the de-embedded behavior of the filter data for −∞ ≤ω ≤ +∞. The projection of SC on H2
µ is F . The matrix F is the starting point
for the rational approximation Srat.
4.3.4 DETERMINATION OF STABLE RATIONAL MATRIX OF MCMILLAN DEGREE N
Knowing the delays αii, the frequency shifts βii and the polynomials mkl that
complete the S-parameters outside of the simulated frequency band, we can
finally define the matrix F :
F (jω) =
[PH2(SC11)(jω) PH2(SC12)(jω)
PH2(SC21)(jω) PH2(SC22)(jω)
](4.19)
The matrix F (jω) represents the stable part of the filter response with the
influence of the access lines de-embedded for every lowpass frequency in the range
from −∞ to +∞. The rational matrix Srat(jω) is determined by minimizing
the following least-squares approximation problem:
minR‖ F (jω)−R(jω) ‖2=
∑
k,l∈1,2‖ Fkl(jω)−Rkl(jω) ‖2 (4.20)
where R(jω) is a stable rational matrix of McMillan degree ≤ N . The minimizer
of (4.20) is called Srat(jω). The problem (4.20) is minimized using the software
RARL2 [RARL] . Without going into detail, we mention that the algorithms
implemented in RARL2 [RARL] are based on the following principles:
• The stable rational matrices of given McMillan degree can be nicely parametrized
using Schur parameters.
• If Fkl 6∈ H2, the unstable part of Fkl can not be well approximated by a
stable rational function Rkl.
More details can be found in [Oliv 13; Marm 02].
4.4 Synthesis of the Coupling Matrix in Arrow Form
The coupling matrix extraction yields a transversal N +2 coupling matrix start-
ing from the rational matrix Srat(jω) using Gilbert’s method [Gilb 63] (Sec-
tion 2.7.2). Next, this matrix is transformed to its canonical arrow form M0arr
(Section 2.7.3). The rational approximation method imposes the causality, the
4.4 SYNTHESIS OF THE COUPLING MATRIX IN ARROW FORM 85

stability and the McMillan degree N of Srat(jω). The latter is a necessary
condition to obtain a state-space system matrix of size N ×N (Section 2.7.2) as
is required here.
The rational approximation does not impose the order of p21(jω) and therefore
it normally identifies N finite transmission zeros. This implies that a direct
source-to-load coupling is to be present in the extracted N + 2 coupling matrix.
This can be shown using the shortest path rule that is explained in Section 2.8.1.
The corresponding rational Y -parameters hence do not fulfill (2.78), as the num-
ber of transmission zeros exceeds N−2. (2.78) is a necessary condition to obtain
a matrix Bf where only elements (1, 1) and (N, 2) are non-zero as is explained in
(2.91). These elements represent the source-to-resonator 1 and load-to-resonator
N coupling respectively. When the number of transmission zeros exceeds N −1,
the elements (1, 2) and (N, 1) of Bf are also non-zero. The elements (1, 2)
and (N, 1) represent the load-to-resonator 1 and source-to-resonator N coupling
respectively.
The fact that the number of transmission zeros exceeds N − 2, also results
in a non-zero arrow form where the main diagonal, first upper diagonal and
last column are obtained as is explained in Section 2.8.2. This implies that
the presence of more inter-resonator couplings in the simulated filter than in
the ideal coupling topology. These couplings can be interpreted as parasitic
or unwanted couplings. The non-zero diagonal elements can be interpreted as
frequency offsets between the resonant frequency of the individual resonators
and the center frequency of the filter.
Note that the simulated filter is not necessarily lossless. In the case of a lossy
structure the elements of the coupling matrix are complex rather than purely
imaginary. The real part of the diagonal elements can be interpreted as the
quality factor of the resonators (Section 2.6.1). Although synthesis methods
exist that take into account lossy couplings [Mira 08], we do not take them into
account here neither during the synthesis or the tuning of the filter.
The extraction method yields a complex-valued arrow form coupling matrix
M0arr where the diagonal, first upper diagonal and last column are non-zero.
This is not in line with the arrow form obtained from the golden goal and
therefore additional steps are needed to bring the 2 representations as closely
together as possible in order to be able to reconfigure the extracted matrix to
the coupling topology of the golden goal.
86 CHAPTER 4 EXTRACTION OF THE COUPLING MATRIX

4.5 Reconfiguration of the Extracted Arrow Form Matrix
The extracted arrow form M0arr is in general not compatible with the ideal
coupling topology of the prototype filter, since its number of non-zero elements
exceeds the number of degrees of freedom that can be accommodated by the
target topology (Section 2.8.2). As seen in Section 4.4, this is due to the presence
of parasitic couplings.
Some of these couplings can be seen as second order effects that influence the
filter only marginally, but unfortunately some others must be treated as first
order effects with a significant impact. In what follows we describe the coupling
topology of a filter by means of a matrix T whose elements are 1 if the corre-
sponding coupling is present in the topology and are 0 otherwise. As is explained
in Section 2.8.2 a full arrow form is not always compatible with any topology T .
We denote the arrow form that is compatible with a topology T as MTarr. In
order to obtain a compatible arrow form, certain elements of the extracted arrow
form matrix M0arr must be forced to zero, yielding a reduced arrow form MT
arr
of the initial coupling matrix M0arr. We denote the ideal coupling topology of
the golden goal as Tid. We explain in the next section that the coupling topology
of the real filter denoted as Tstruct does not necessarily correspond to Tid.
Reduction of M0arr to MT
arr
To be able to reduce the complete arrow form Marr to the reduced one that is
compatible with the selected physical filter structure MTarr, we need to assume
that the implemented coupling topology is sufficiently close to the ideal topology
Tid. This assumption implies that the elements that are set to zero during the
reduction of the arrow form are small with respect to the elements that are kept.
In other words, we assume that the parasitic inter-resonator couplings are second
order effects. In practice we observe that the parasitic couplings are at least an
order of magnitude lower than the desired couplings.
For topologies supporting asymmetrical responses the matrix M0arr is reduced
to an arrow form MTidarr by simply eliminating the undesired parasitic couplings
in M0arr. In practice this corresponds to eliminating elements in the last row
and column M0arr as is explained in Section 2.8.2. Physically, this eliminates
the couplings that are present in the real filter, but not in the ideal coupling
topology.
For topologies supporting symmetrical responses, the diagonal of Tid is zero and
the diagonal of the corresponding arrow form is to be zero as well. Since the real
physical filter is never perfectly tuned, its response is not ideally symmetrical
4.5 RECONFIGURATION OF THE EXTRACTED ARROW FORM MATRIX 87

with respect to the center frequency. This asymmetry is mainly due to the
presence of self-couplings. Unlike the inter-resonator parasitic couplings, these
self-coupling can not be treated as a second order effects. Therefore they have
to remain present in the reduced arrow form as well. We do not eliminate the
diagonal elements of M0arr by bluntly setting them to zero. We reduce M0
arr to
an arrow form compatible with the coupling topology closest to the ideal coupling
topology that accommodates asymmetric responses instead. This makes that
the coupling topology Tstruct to which the coupling matrix is reconfigured does
not correspond to Tid in this case. This is different in the case for topologies
supporting asymmetrical responses. The choice of the coupling topology Tstruct
heavily depends on the topology Tid. In the examples considered in this work,
we see that Tstruct has a non-zero diagonal and some extra cross-couplings with
respect to Tid. We illustrate this for a cascaded quadruplet filter in Section 4.8.
Note that the number of non-zero couplings grows fromN+nf2
2 +1 to 2N+nfz+1
as is explained in Section 2.8.2.
Reconfiguration of MTarr
OnceMTarr is determined, we calculate all the similarity transformation matrices
Pi that reconfigure MTarr to the desired coupling topology T . These similarity
transformations are obtained using the software DEDALE-HF [Seyf 00]. Note
that nS multiple solutions might exist for certain coupling topologies. (nS de-
notes the number of solutions) For such topologies every possible solution (every
possible transformation Pi (i ∈ 1, . . . , nS)) is determined. Once every Pi is
determined, they are applied to the originally extracted arrow form coupling ma-
trix M0arr. We apply the transformation to M0
arr rather than MTarr, to take into
account the second order parasitic couplings. This process yields nS extracted
coupling matrices MPi (i ∈ 1, . . . , nS). Note that these matrices still contain
non-zero elements in their last column (and last row) that are not present in the
ideal topology. This step thus re-introduces the parasitic couplings that were
eliminated to obtain MTarr.
4.6 Dealing with Parasitic Couplings
As is explained in Section 2.8.3, the matrices MPi (i ∈ 1, . . . , nS) contain non-
zero elements resulting in couplings that are not present in the ideal coupling
topology. These non-zero elements are located in the last column and row ofMPi
and are therefore not necessarily located at the place where they are physically
expected. These elements can be interpreted as follows: they model the part of
the filter response that can not be explained (modeled) by the coupling matrix
88 CHAPTER 4 EXTRACTION OF THE COUPLING MATRIX

model of the ideal coupling topology. They do not only model the effect of the
parasitic couplings, but can also account for the fact that the physical coupling
is not frequency independent while this is assumed in the coupling matrix model.
In order to have a more physical distribution of the parasitic couplings, we can
approximate the compensated simulations SC(jω) at the simulated lowpass fre-
quencies by a coupling matrix that contains non-zero elements only at positions
where the parasitic couplings are expected to be present from a physical point
of view. The initial matrix that is used to start this optimization method is
the matrix MPi in which the extra elements in the last row and column are
removed. We denote this matrix as Mpar,0 . Eliminating elements in the last
row and column, will for sure deteriorate the approximation. The idea is to add
the parasitic couplings in the matrix to improve the approximation. Therefore
the optimization method minimizes the 2-norm of the difference between the
compensated S-matrix and the response created by the coupling matrix. For
each S-parameter the method calculates the 2-norm of the difference between
SCkl(jω) and the response created by Mpar,h (where h denotes the iteration in
the optimization method):
ckl =
√√√√nf∑
f=1
|SCkl(ωf )− SMpar,h
kl (ωf ))|2 (4.21)
where k, l ∈ 1, 2, nf is the number of simulated frequencies and SMpar,h
kl is the
response corresponding to the coupling matrix Mpar,h.
The least-squares cost function that is minimized is the 2-norm of the total
difference:
c =
√√√√2∑
k=1
2∑
l=1
c2kl (4.22)
and is to be minimized over the non-zero elements in the coupling matrixMpar,h.
The minimizer is calculated using the Matlab function fminunc, which searches
the minimum for an unconstrained multi-variable scalar function. The drawback
of this method is that it heavily depends of its initial values and that the algo-
rithm might converge to a local minimum of unpredictable quality if the initial
value is poor. In Section 4.8 we apply this optimization method to redistribute
the parasitic couplings in cascaded quadruplet topology.
4.6 DEALING WITH PARASITIC COUPLINGS 89
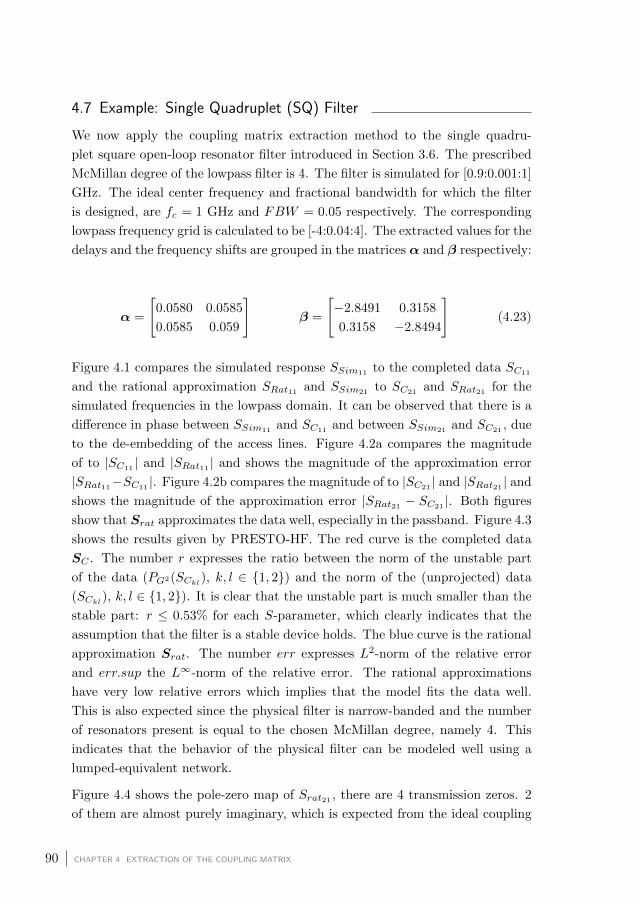
4.7 Example: Single Quadruplet (SQ) Filter
We now apply the coupling matrix extraction method to the single quadru-
plet square open-loop resonator filter introduced in Section 3.6. The prescribed
McMillan degree of the lowpass filter is 4. The filter is simulated for [0.9:0.001:1]
GHz. The ideal center frequency and fractional bandwidth for which the filter
is designed, are fc = 1 GHz and FBW = 0.05 respectively. The corresponding
lowpass frequency grid is calculated to be [-4:0.04:4]. The extracted values for the
delays and the frequency shifts are grouped in the matrices α and β respectively:
α =
[0.0580 0.0585
0.0585 0.059
]β =
[−2.8491 0.3158
0.3158 −2.8494
](4.23)
Figure 4.1 compares the simulated response SSim11to the completed data SC11
and the rational approximation SRat11 and SSim21 to SC21 and SRat21 for the
simulated frequencies in the lowpass domain. It can be observed that there is a
difference in phase between SSim11and SC11
and between SSim21and SC21
, due
to the de-embedding of the access lines. Figure 4.2a compares the magnitude
of to |SC11| and |SRat11
| and shows the magnitude of the approximation error
|SRat11−SC11
|. Figure 4.2b compares the magnitude of to |SC21| and |SRat21
| and
shows the magnitude of the approximation error |SRat21 − SC21 |. Both figures
show that Srat approximates the data well, especially in the passband. Figure 4.3
shows the results given by PRESTO-HF. The red curve is the completed data
SC . The number r expresses the ratio between the norm of the unstable part
of the data (PG2(SCkl), k, l ∈ 1, 2) and the norm of the (unprojected) data
(SCkl), k, l ∈ 1, 2). It is clear that the unstable part is much smaller than the
stable part: r ≤ 0.53% for each S-parameter, which clearly indicates that the
assumption that the filter is a stable device holds. The blue curve is the rational
approximation Srat. The number err expresses L2-norm of the relative error
and err.sup the L∞-norm of the relative error. The rational approximations
have very low relative errors which implies that the model fits the data well.
This is also expected since the physical filter is narrow-banded and the number
of resonators present is equal to the chosen McMillan degree, namely 4. This
indicates that the behavior of the physical filter can be modeled well using a
lumped-equivalent network.
Figure 4.4 shows the pole-zero map of Srat21, there are 4 transmission zeros. 2
of them are almost purely imaginary, which is expected from the ideal coupling
90 CHAPTER 4 EXTRACTION OF THE COUPLING MATRIX

−1 −0.5 0 0.5 1−1
−0.5
0
0.5
1
Real part S11
Imag
inar
yp
art
S11
(a) Nyquist diagram for SSim11 (–o), SC11 (–o) and SRat11 (–+).
−1 −0.5 0 0.5 1−1
−0.5
0
0.5
1
Real part S21
Imag
inar
yp
art
S21
(b) Nyquist diagram for SSim21 (–o), SC21 (–o) and SRat21 (–+).
Figure 4.1 Comparison between the simulations, analytic completion and rationalapproximation for S11 and S21.
topology. While the other 2 are complex and relatively far from the passband,
which makes that the direct source-to-load coupling is not that strong as we will
see in the extracted coupling matrix. Note that there are 2 poles that do not
lie in the passband, which is consistent with the fact that the bandwidth of the
physical filter is broader than the desired bandwidth.
4.7 EXAMPLE: SINGLE QUADRUPLET (SQ) FILTER 91

−4 −3 −2 −1 0 1 2 3 4−80
−70
−60
−50
−40
−30
−20
−10
0
ω
|S11|(
dB
)
(a) Magnitude of |SC11 | (–o), |SRat11 | (–+) and the approximationerror (x).
−4 −3 −2 −1 0 1 2 3 4−90
−80
−70
−60
−50
−40
−30
−20
−10
0
ω
|S21|(
dB
)
(b) Magnitude of |SC21 | (–o), |SRat21 | (–+) and the approximationerror (x).
Figure 4.2 Comparison between the magnitude of the analytic completion and ratio-nal approximation for S11 and S21 and the error of the approximation.
Figure 4.5 compares the coupling graphs of the ideal SQ filter and the coupling
graph of the extracted arrow form M0arr.
92 CHAPTER 4 EXTRACTION OF THE COUPLING MATRIX
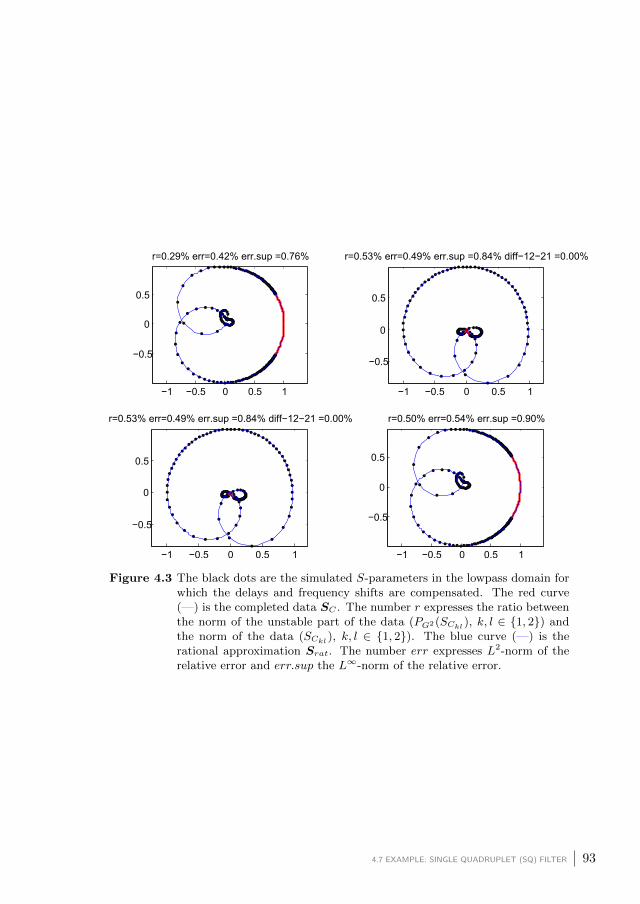
−1 −0.5 0 0.5 1
−0.5
0
0.5
r=0.29% err=0.42% err.sup =0.76%
−1 −0.5 0 0.5 1
−0.5
0
0.5
r=0.53% err=0.49% err.sup =0.84% diff−12−21 =0.00%
−1 −0.5 0 0.5 1
−0.5
0
0.5
r=0.53% err=0.49% err.sup =0.84% diff−12−21 =0.00%
−1 −0.5 0 0.5 1
−0.5
0
0.5
r=0.50% err=0.54% err.sup =0.90%
Figure 4.3 The black dots are the simulated S-parameters in the lowpass domain forwhich the delays and frequency shifts are compensated. The red curve(—) is the completed data SC . The number r expresses the ratio betweenthe norm of the unstable part of the data (PG2(SCkl), k, l ∈ 1, 2) andthe norm of the data (SCkl), k, l ∈ 1, 2). The blue curve (—) is therational approximation Srat. The number err expresses L2-norm of therelative error and err.sup the L∞-norm of the relative error.
4.7 EXAMPLE: SINGLE QUADRUPLET (SQ) FILTER 93
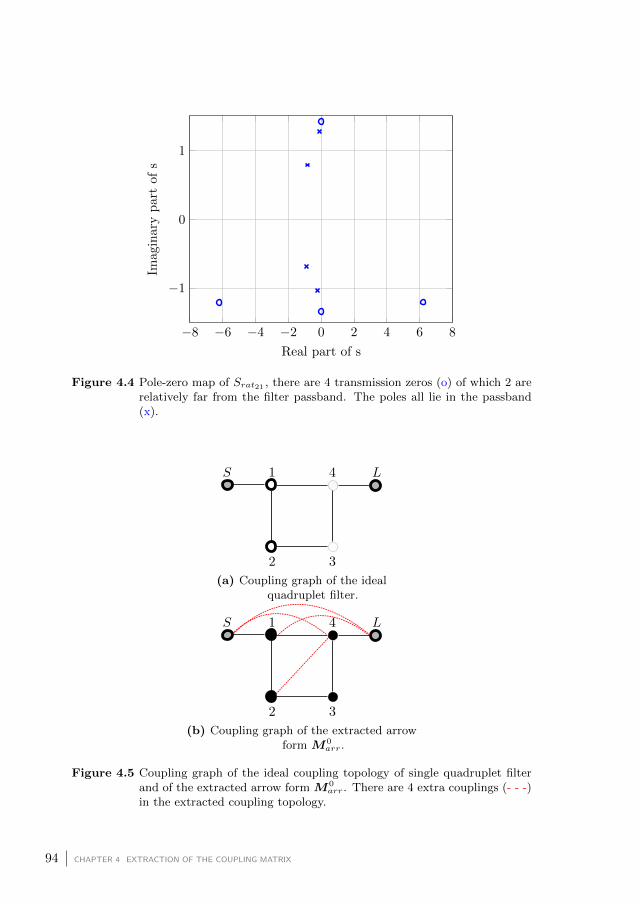
−8 −6 −4 −2 0 2 4 6 8
−1
0
1
Real part of s
Imag
inar
yp
art
ofs
Figure 4.4 Pole-zero map of Srat21 , there are 4 transmission zeros (o) of which 2 arerelatively far from the filter passband. The poles all lie in the passband(x).
(a) Coupling graph of the idealquadruplet filter.
(b) Coupling graph of the extracted arrowform M0
arr.
Figure 4.5 Coupling graph of the ideal coupling topology of single quadruplet filterand of the extracted arrow form M0
arr. There are 4 extra couplings (- - -)in the extracted coupling topology.
94 CHAPTER 4 EXTRACTION OF THE COUPLING MATRIX

The imaginary part of the extracted arrow form matrix is:
Im(M0arr) =
0 1.0228 0 0 0.0131 0.0115
1.0228 0.0266 0.7715 0 −0.4555 −0.0131
0 0.7715 −0.0097 0.8366 0.1845 0
0 0 0.8366 −0.4123 0.7501 0
0.0131 −0.4555 0.1845 0.7501 0.0266 −1.0240
0.0115 −0.0131 0 0 −1.0240 0
(4.24)
Clearly, the extracted coupling matrix contains more non-zero elements than the
ideal coupling matrix given by (3.24) (Figure 4.5). In this particular case the
arrow form topology is very close to the ideal topology of the single quadruplet.
Note that the elements in bold font correspond to the non-zero elements of the
ideal topology. Therefore it is unnecessary to reconfigure M0arr. Also note that
in the case of a single quadruplet filter, there is only one solution to the coupling
matrix reconfiguration problem.
As discussed in Section 4.4, the extracted coupling matrix contains a source-to-
load coupling MSL = 0.0115, a source-to-resonator N coupling MSN = 0.0131
and load-to-resonator 1 coupling ML1 = −0.0131. These couplings are 2 orders
of magnitude lower than the input and output coupling MS1 = 1.0228 and
MLN = −1.0240, which confirms that these additional terms are second order
effects. Also remark that MLN has a negative sign. This is due to the choice of
β21 as is discussed in Section 4.3.3. From a physical point of view MLN should
have the same sign as MS1. It is possible to redo the extraction procedure with
a different choice for β21. In this case we did not have to do this, because this
choice does not affect the values of the coupling parameters.
Another notable difference is the presence of the self-couplings, which also ex-
plains why the center frequency of the passband of the filter does not exactly
coincide with 1 GHz of the prototype filter (as can be seen in Figure 3.16). Fi-
nally there is M24 which models the presence of a parasitic coupling. Although
M24 is smaller than the other inter-resonator couplings, it is still of the same
order of magnitude indicating that the presence of the parasitic couplings is
not negligible. From a physical point of view there is no reason to assume the
presence of coupling M24 and the absence of the coupling M13. It is possible to
re-optimize the coupling matrix to redistribute the parasitic couplings in a more
4.7 EXAMPLE: SINGLE QUADRUPLET (SQ) FILTER 95

physical way. In this case one could argue that M24 should be equal to M13
due to the geometric symmetry that is present in the structure. This is easily
imposed by applying the following similarity transformation:
P =
1 0 0 0 0 0
0 1 0 0 0 0
0 0 cos θ − sin θ 0 0
0 0 sin θ cos θ 0 0
0 0 0 0 1 0
0 0 0 0 0 1
(4.25)
where θ is:
θ = arctanM24
M34 +M12(4.26)
Applying P to M0arr yields:
Im(PM0arrP
t) =
0 1.0228 0 0 0.0131 0.0115
1.0228 0.0266 0.7659 0.0929 −0.4555 −0.0131
0 0.7659 −0.2155 0.8366 0.0929 0
0 0.0929 0.8366 −0.2065 0.7668 0
0.0131 −0.4555 0.0929 0.7668 0.0266 −1.0240
0.0115 −0.0131 0 0 −1.0240 0
(4.27)
Note that due to the transformation now M13 = M24 = 0.0929 which is more or
less half of M24 of (4.24). Another important consequence is that M22 ≈ M33
(which is also physically expected). It is however important to remember that
from a mathematical point of view it is impossible to uniquely identify the
parasitics and more information is needed if one wants to do so.
Finally note that extracted matrix also has a real part which is equal to:
96 CHAPTER 4 EXTRACTION OF THE COUPLING MATRIX

Re(M0arr) =
0 −0.0001 0 0 −0.0002 −0.0016
−0.0001 0.0024 0.0009 0 0.0004 0.0002
0 0.0009 −0.0007 0.0014 0.0005 0
0 0 0.0014 −0.0004 0.0008 0
−0.0002 −0.0004 0.0005 0.0008 0.0023 0.0001
−0.0016 0.0002 0 0 0.0001 −0.0004
(4.28)
Although the filter is simulated for a loss-less substrate and a perfect conductor,
Momentum takes into account the radiation effects. These losses are however
small and can be neglected, as it is seen that the real part is 3 orders of magnitude
smaller than the imaginary part.
4.8 Example: Cascaded Quadruplet (CQ) Filter
For the second example, we apply the extraction method to the design of an 8-
pole cascaded quadruplet (CQ) filter consisting of SOLR resonators (Figure 4.6).
The filter is implemented in a RT/duroid substrate with a relative dielectric
constant εr = 10.2 and a thickness t = 1.27 mm. The filter is designed to
have a center frequency fc = 1 GHz, a FBW = 0.06 and a RL = −23 dB and
2 pairs of finite TZs at ω = ±1.2 and ω = ±1.6. We first synthesize the ideal
coupling matrix in the lowpass domain using the techniques described in Chapter
2. DEDALE-HF [Seyf 00] yields 2 possible solutions for this case, among which
one is chosen. Table 4.1 contains the ideal lowpass coupling parameters. Since
this topology accommodates a symmetric response, the self-coupling is zero. The
initial values for this design are generated using the design curves presented in
[Hong 96]. Table 4.2 contains the initial geometric dimensions.
MS1 = M8L M12 M23 M34 M14
1.0416 0.8478 0.6896 0.5217 -0.1463M45 M56 M67 M78 M58
0.5328 0.4424 0.8218 0.7769 -0.3694
Table 4.1 Ideal lowpass coupling parameters for the 8-pole cascaded quadruplet filter.
Figure 4.7 compares the magnitude |S11| and |S21| of the rational approxima-
tion and the simulation. Figure 4.8 also shows the approximation error for the
simulated frequencies. The error is acceptable in the pass band of the filter for
4.8 EXAMPLE: CASCADED QUADRUPLET (CQ) FILTER 97

Physical parameter Value (mm) Physical parameter Value (mm)wfeed 1 d34 1.77tin = tout 5.73 d14 2.27g1 = . . . = g8 1.5 d45 2.2a 16.25 d56 1.96w 1 d67 1.53d12 1.22 d78 1.32d23 1.8 d58 1.56
Table 4.2 Initial values for the physical design parameters of the SOLR CQ filter.
Figure 4.6 Top-view of the layout of a eighth order SOLR cascaded quadruplet filter.
both S11 and S21.
Note however that the error has the same order of magnitude around the TZs.
This is however expected since |S21| becomes very small in that region. The
extracted arrow form M0arr contains 25 non-zero elements where the ideal cou-
pling matrix contains 11 non-zero elements. The imaginary part of the (N ×N)
arrow form coupling matrix is:
98 CHAPTER 4 EXTRACTION OF THE COUPLING MATRIX

−3 −2 −1 0 1 2 3−30
−20
−10
0
ω
|S11|(
dB
)
(a) |S11| (—) for the simulated filter and rational approximation (—).
−3 −2 −1 0 1 2 3
−60
−40
−20
0
ω
|S21|(
dB
)
(b) |S21| (—) for the simulated filter and rational approximation (—).
Figure 4.7 Comparison between the simulated response and the rational approxima-tion.
4.8 EXAMPLE: CASCADED QUADRUPLET (CQ) FILTER 99

−3 −2 −1 0 1 2 3−80
−60
−40
−20
0
ω
|S21|(
dB
)
(a) Bode plot for |SC11 | (–o), |SRat11 | (–+) and the approximationerror (x).
−3 −2 −1 0 1 2 3−80
−60
−40
−20
0
ω
|S21|(
dB
)
(b) Magnitude of |SC21 | (–o), |SRat21 | (–+) and the approximationerror (x).
Figure 4.8 Comparison between the magnitude of the analytic completion and ratio-nal approximation for |S11| and |S21| and the error of the approximation.
100 CHAPTER 4 EXTRACTION OF THE COUPLING MATRIX

0.5780 −0.9709 0 0 0 0 0 −0.0016
−0.9709 0.2995 −0.7166 0 0 0 0 −0.0041
0 −0.7166 0.3176 −0.6497 0 0 0 −0.0822
0 0 −0.6497 0.3416 −0.7082 0 0 0.0175
0 0 0 −0.7082 0.4180 −0.4232 0 0.6026
0 0 0 0 −0.4232 0.4936 −1.0747 0.0986
0 0 0 0 0 −1.0747 0.1211 −0.7639
−0.0016 −0.0041 −0.0822 0.0175 0.6026 0.0986 −0.7639 0.5494
The source-to-resonator 1 coupling is 0.9941, the load-to-resonator N coupling is
0.9920. The direct source-to-load coupling is only 0.0002, the source-to-resonator
N coupling is -0.0001 and the load-to-resonator coupling is -0.0001. These cou-
plings are much smaller than the other non-zero couplings. Looking at the
physical lay-out of the filter (Figure 4.6), this is expected since the load is well
separated from the source. Figure 4.7a shows that there is a clear offset between
the center frequency of the filter and the ideal center frequency. Moreover the
response is asymmetric around ω = 0. This is confirmed by the presence of
the non-zero diagonal elements. In order to take this effect into account, the
chosen target coupling topology is the one that supports asymmetric responses
and is the closest to the ideal coupling topology. Figure 4.9 shows the extended
coupling topology. Note that in each quadruplet an extra coupling is added. This
coupling topology contains 21 non-zero couplings, which is the number that is
needed to accommodate a (8, 4) asymmetric response. There are 6 solutions
to the reconfiguration problem and they are all calculated using DEDALE-HF.
Table 4.3 contains the extracted coupling parameters for each solution. In Chap-
ter 5 we will discuss how we can determine which solution corresponds to the
physically implemented coupling matrix. Note that the input, output and the
source-to-load couplings are not changed due to the transformations.
4.8 EXAMPLE: CASCADED QUADRUPLET (CQ) FILTER 101

Figure 4.9 Extended coupling topology for the cascaded quadruplet filter.
Parameter Sol. 1 Sol. 2 Sol. 3 Sol. 4 Sol. 5 Sol. 6M12 0.9467 0.8848 0.9073 0.9383 0.9296 0.9211M23 0.8549 0.9655 0.9109 0.8618 0.2979 0.2628M34 0.6169 0.5410 0.5438 0.6016 0.3585 0.3550M14 -0.2157 -0.4001 -0.3462 -0.2496 0.2800 0.3067M45 0.6656 0.6673 0.6674 0.6629 0.6750 0.6564M56 0.5314 0.6215 0.6134 0.5282 0.3727 0.3405M67 0.9410 0.8468 0.8577 0.8854 0.2555 0.2996M78 0.8978 0.9581 0.9501 0.9193 0.9338 0.9396M58 -0.3973 -0.2137 -0.2468 -0.3446 0.3025 0.2840M11 0.5780 0.5780 0.5780 0.5780 0.5780 0.5780M22 0.2656 0.3934 0.4313 0.2215 -0.0383 0.6822M33 0.4738 0.1397 0.0043 0.6173 -0.7367 1.4598M44 0.3833 0.3742 0.3655 0.3890 0.3598 0.2493M55 0.3863 0.3733 0.3849 0.3702 0.2604 0.3524M66 0.0267 0.3975 0.5316 -0.0911 1.4411 -0.7528M77 0.4558 0.3133 0.2737 0.4845 0.7051 0.0006M88 0.5494 0.5494 0.5494 0.5494 0.5494 0.5494M24 -0.0662 0.1190 0.1842 -0.1363 0.5516 -0.5663M57 0.1388 -0.0585 -0.1243 0.1966 -0.5496 0.5604
Table 4.3 Extracted coupling parameters of the SOLR CQ filter for each possiblesolution of the extended coupling topology.
102 CHAPTER 4 EXTRACTION OF THE COUPLING MATRIX

In this case the physically implemented N ×N coupling matrix is MP1 :
0.5780 0.9467 0 −0.2157 0 0 0 0.0016
0.9467 0.2656 0.8549 −0.0662 0 0 0 −0.0040
0 0.8549 0.4738 0.6169 0 0 0 0
−0.2157 −0.0662 0.6169 0.3833 0.6656 0 0 0.0009
0 0 0 0.6656 0.3863 0.5314 0.1388 −0.3973
0 0 0 0 0.5314 0.0267 0.9410 0
0 0 0 0 0.1388 0.9410 0.4558 0.8978
0.0016 −0.0040 0 0.0009 −0.3973 0 0.8978 0.5494
(4.29)
Note that the parasitic couplings are mainly modeled by elements M24 and M57.
In the same way as in the case for the SQ filter, one could argue that extra
couplings in each quadruplet should be equal: M24 = M13 and M57 = M46.
A similar transformation as (4.25) allows also here to equalize the parasitic
couplings in each quadruplet of matrix (4.29). From a physical point of view,
one would also expect parasitic coupling between resonator 4 and 6 and between
resonator 3 and 5. In order to redistribute the parasitic couplings, the parasitic
couplings in the last row and column that are not present in the target topology
are first eliminated in matrix (4.29). Next the matrix is transformed such that
M24 = M13 and M57 = M68. This yields the matrix Mpar,0:
0.5780 0.9458 −0.0400 −0.2157 0 0 0 0
0.9458 0.3382 0.8606 −0.0400 0 0 0 0
−0.0400 0.8606 0.4012 0.6192 0 0 0 0
−0.2157 −0.0400 0.6192 0.3833 0.6656 0 0 0
0 0 0 0.6656 0.3863 0.5423 0.0868 −0.3973
0 0 0 0 0.5423 0.2118 0.9647 0.0868
0 0 0 0 0.0868 0.9647 0.2707 0.8936
0 0 0 0 −0.3973 0.0868 0.8936 0.5494
(4.30)
This matrix is used as an initial guess for the optimization discussed in Sec-
tion 4.6. For this matrix the value of the cost function is 0.0274. The optimiza-
tion yields the matrix Mpar given below:
4.8 EXAMPLE: CASCADED QUADRUPLET (CQ) FILTER 103

0.5791 0.9439 −0.0431 −0.2232 0 0 0 0
0.9439 0.3398 0.8657 −0.0411 0 0 0 0
−0.0431 0.8657 0.4040 0.6167 −0.0011 0 0 0
−0.2232 −0.0411 0.6167 0.3894 0.6667 0.0001 0 0
0 0 −0.0011 0.6667 0.3799 0.5462 0.0871 −0.3869
0 0 0 0.0001 0.5462 0.2092 0.9581 0.0870
0 0 0 0 0.0871 0.9581 0.2683 0.8980
0 0 0 0 −0.3869 0.0870 0.8980 0.5501
(4.31)
The cost function is 0.0128. Figure 4.10 compares the response obtained for the
different coupling matrices (MP1, Mpar,0, Mpar) to the one obtained with the
compensated S-parameters. It is clear that a removal of the elements in the
last row and column deteriorates the approximation. The optimization slightly
improves the approximation as can be seen by the value of the cost function.
It is important to note that the optimized coupling matrix depends heavily on
the initial values and that the algorithm possibly converges to a local minimum.
Moreover the example shows that the coupling parameters of interest are not
heavily affected by the optimization.
4.9 Conclusion
In this chapter we have described a method to extract a coupling matrix whose
corresponding response optimally approximates the simulated S-parameters and
whose coupling topology is close to the coupling topology of the ideal prototype.
Since the real filter contains parasitic inter-resonator couplings and in some cases
unwanted self-couplings, we have proposed a strategy to handle them. In the
case of topologies having multiple (nS) solutions, we systematically determine all
of these solutions using DEDALE-HF [Seyf 00]. In Section 4.7 and Section 4.8
we have treated a SQ and CQ filters respectively. In both cases the extracted
coupling matrices approximate the simulated data very well. Moreover they give
a good estimate of the first order and parasitic effects in the real filter. In the
case of the CQ filter we find 6 possible solutions that are all equivalent from a
mathematical point of view. In the next chapter we introduce a method that
allows to determine which of these solutions corresponds to the filter that was
physically implemented.
104 CHAPTER 4 EXTRACTION OF THE COUPLING MATRIX

−3 −2 −1 0 1 2 3−30
−20
−10
0
ω
|S11|(
dB
)
(a) |S11| (—) for the simulated filter, the response created by MP1 (—), by Mpar,0 (-- -) and by Mpar (—)
−3 −2 −1 0 1 2 3
−60
−40
−20
0
ω
|S21|(
dB
)
(b) |S21| (—) for the simulated filter, the response created by MP1 (—), by Mpar,0
(- - -) and by Mpar (—)
Figure 4.10 Comparison between the simulated response and the response createdby MP1 , Mpar,0 and Mpar. It is clear that the removal of the parasiticelements in the last column and row mainly affects the TZs.
4.9 CONCLUSION 105


5Dealing with Multiple Solutions: A Simulation Based Strategy
This chapter introduces a novel identification method to select the physically im-
plemented coupling matrix in the case of cascaded trisection (CT) and cascaded
quadruplet (CQ) topologies among all possible coupling matrices. Knowledge
of the physically implemented coupling matrix enables a designer to adjust the
filter dimensions to obtain a coupling matrix that is closer to the golden goal.
In the case of CT and CQ filters, the reconfiguration problem has multiple solu-
tions as discussed before. Selecting a non-physical solution may lead to wrong
adjustments during the tuning procedure. The identification method consist
of 2 phases: an initialization and a tracking phase. The initialization phase
determines the physical coupling matrix for the initial design. Once the physical
matrix of the initial design is known, we present a method to determine the
physically implemented coupling matrix during the tuning procedure using the
design curves introduced in Chapter 3. The method is based on the relation
between the realized transmission zeros (TZs) and the geometry of the individ-
ual sections (triplets and quadruplets) of the filter. Section 5.2 analyzes the
CT and CQ topologies in detail. Section 5.3 explains the identification method.
Section 5.4 applies the method to tune a CQ filter. The work presented in this
chapter has been published in [Caen 15a].
5.1 Introduction
In the literature there are several examples of microstrip CT and CQ filters using
various types of resonators: [Hong 01] presents both CT and CQ filters using
SOLR resonators. [Hong 99] uses SOLR resonators to implement CT filters,
[Yang 99] combines λ2 open line and hairpin line resonators.
The design methodologies presented in [Yang 99; Hong 99; Hong 01] are based
on the divide-and-conquer strategy explained in Chapter 3. Therefore, they only
yield initial values for the physical dimensions of the filters. In general tuning is
107

still required to meet the specifications. As discussed in Chapter 4, we propose
to tune the filters by comparing the extracted coupling matrix to the golden
goal. This comparison enables a designer to adjust the physical dimensions of
the filter to obtain a coupling matrix that is closer to the golden goal. Several
tuning methods based on this comparison have been developed in the literature
[Hars 01; Garc 04; Koza 06]. Although these methods yield excellent results,
they have an important limitation: they only handle topologies that have a
unique solution to the reconfiguration problem.
In Chapter 4, we have seen that in the case of a CQ filter several solutions exist
that correspond to the target coupling topology. In Section 5.2 we explain where
these solutions come from and what their relation is to the finite TZs present in
the response. From a mathematical point of view all these solutions are equiv-
alent. However, during the tuning procedure it is important to compare the
physically implemented solution to the golden goal. Selecting a non-physical so-
lution instead may lead to wrong adjustments of the physical dimensions hereby
destroying the whole tuning process. The identification method used to perform
this selection is explained in Section 5.3. It consists of 2 phases: an initialization
phase and a tracking phase. The initialization phase determines the physical
coupling matrix for the initial design obtained using the design curves. This
phase requires a number of extra simulations equal to the number of sections
(quadruplets or trisections) that are present in the filter. Once the physical
matrix of the initial design is known, it is possible to track the physical solution
during the tuning procedure. This tracking is based on the knowledge of the
design curves. To illustrate the usefullness of the method we use it to to tune
the CQ filter introduced in Section 4.8.
5.2 Cascaded Trisection and Quadruplet Topologies
Cascaded trisection (CT) and cascaded quadruplet (CQ) topologies are typical
examples of topologies supporting multiple solutions. These topologies consist
of a cascade of sections, where each section corresponds to a quadruplet (Fig-
ure 5.1a) or a trisection (Figure 5.1b) of resonators. The coupling matrices
associated to these topologies consist of blocks of non-zero elements. Such a
block represents the couplings that are present within a section.
A quadruplet section (Figure 5.1a) creates a finite TZ pair which is symmetrically
located with respect to the center frequency of the filter. Cascading quadruplets
thus allows to realize filters that have several finite TZ pairs. The position
of one TZ pair can be tuned by acting on the quadruplet that is responsible
108 CHAPTER 5 DEALING WITH MULTIPLE SOLUTIONS: A SIMULATION BASED STRATEGY

(a) Coupling graph of an idealquadruplet section.
(b) Coupling graph of atrisection.
Figure 5.1 Coupling graph of an (ideal) quadruplet and of a trisection.
for the realization of that pair. In the case that extra cross couplings and/or
self-couplings are present in the quadruplet (for example between resonator 1
and 3), the quadruplet still creates 2 TZs, but their positions are no longer
symmetrical with respect to the center frequency of the passband of the filter.
In the examples discussed in Section 3.6 and Section 4.8 we observe indeed that
the TZs of the implemented filter are not symmetrically located with respect
to the center frequency of the filter because of the presence of parasitic cross-
couplings and self-couplings in the quadruplet sections.
A trisection (sometimes called a triplet) consists of 3 sequentially coupled res-
onators and one extra cross-coupling between the first and the third resonator
(Figure 5.1b). A trisection allows to place a single TZ at a finite frequency.
Trisections hence allow to create filters with asymmetric responses. Similarly as
for CQ filters, it is possible to tune the positions of the single TZs independently
by acting on the corresponding trisections.
The link between the different sections of CT and CQ filters and the positions
of the TZs and TZ pairs also explains the presence of more than 1 solution sup-
ported by the topology. We observe that the number of solutions corresponds to
the number of ways that the independent TZs can be attributed to the different
sections. We denote the number of possible solutions as nS . Assume that there
are p different sections (trisections or quadruplets) in the filter and that a section
k creates nk independent TZs. The total number of independent TZs that can
be attributed to the different sections is thus:
nZ =
p∑
k=1
nk (5.1)
Using binomial coefficients we can calculate the number of possible ways to
attribute the independent TZs to the different sections, which is then the number
5.2 CASCADED TRISECTION AND QUADRUPLET TOPOLOGIES 109

of solutions nS :
nS =
(nZn1
). . .
(nZ −
k−1∑l=1
nl
nk
). . .
(nZ −
p−1∑l=1
nl
np
)=
p∏
k=1
(nZ −
k−1∑l=1
nl
nk
)(5.2)
where(yx
)denotes the binomial coefficient.
(yx
)= y!
x!(y−x)! should be read as
y choose x since it expresses the number of ways x elements can be chosen
from a set of y elements. Equation (5.2) can be interpreted as follows: the first
section creates n1 independent TZs and thus there are(nZn1
)ways to attribute
the n1 independent TZs to this section. Once these TZs have been attributed
to the first section, there are only nZ − n1 independent TZs left to attribute.
Thus there are(nZ−n1
n2
)ways to attribute the remaining independent TZs to the
second section. Repeating this reasoning for p sections finally yields (5.2).
It is important to note that nZ is not necessarily equal to the total number of
finite transmission zeros nfz. For example, in the case of a CQ filter consisting
of p ideal quadruplets each quadruplet creates a symmetrical TZ pair and thus
realizes only 1 independent TZ. Therefore nZ = p, while nfz = 2p. When the
quadruplets are non-ideal each quadruplet creates 2 independent TZs and thus
nZ = 2p = nfz.
5.2.1 EXAMPLE: CQ FILTER
Consider the two section CQ filter discussed in Section 4.8. The reconfiguration
of the ideal coupling matrix yields 2 solutions. For the ideal coupling matrix
each quadruplet creates 1 symmetrical finite TZ pair which results 1 independent
finite TZ. Since the filter consists of 2 quadruplets, we have that nZ = 2. If we
fill this in in (5.2), we have that nS =(
21
)(11
)= 2 which corresponds to the
number of solutions given by DEDALE-HF [Seyf 00]. For the physical filter the
quadruplets are no longer ideal, since extra cross-couplings and self-couplings
are present. These sections create 2 independent TZs. Therefore we have that
nZ = 4. If we fill this in (5.2), we find nS =(
42
)(22
)= 6, which corresponds to
the number of solutions given by DEDALE-HF [Seyf 00]. This means that each
of the six solutions describes a different attribution of the independent zeros to
the different quadruplets.
In this example we have chosen to implement the ideal solution for which the
first quadruplet creates the TZ pair at ω = ±1.6 and the second quadruplet
110 CHAPTER 5 DEALING WITH MULTIPLE SOLUTIONS: A SIMULATION BASED STRATEGY

creates the pair at ω = ±1.2.
For the simulated filter, we observe 4 TZs, which we order and denote as follows:
zk(k ∈ 1, . . . , 4): ωz1 ≈ −2.06, ωz2 ≈ −1.82, ωz3 ≈ 1.08 and ωz4 ≈ 1.4. Ta-
ble 4.3 lists the 6 possible solutions MPi (i ∈ 1, . . . , 6). It is now possible to
verify for each solution which quadruplet is responsible for which TZs by calcu-
lating the S-parameters that correspond to one quadruplet (which is represented
by a sub-matrix of the coupling matrix). We denote the first quadruplet as Q1
and the second one as Q2:
• MP1: Q1: z1 and z4, Q2: z2 and z3
• MP2: Q1: z2 and z3, Q2: z1 and z4
• MP3: Q1: z1 and z3, Q2: z2 and z4
• MP4: Q1: z2 and z4, Q2: z1 and z3
• MP5 : Q1: z3 and z4, Q2: z1 and z2
• MP6 Q1: z1 and z2, Q2: z3 and z4
It is clear that when we interchange the quadruplets of MP1, we obtain MP2
.
This is also the case for MP3and MP4
and for MP5and MP6
. The aim of the
identification method introduced in this chapter is to determine the extracted
coupling matrix which corresponds to the physically implemented coupling ma-
trix MPhys. By the physically implemented coupling matrix, we mean the ma-
trix for which the individual blocks create the TZs in the same way as the
physical sections do. For example if physically the first quadruplet creates z1
and z3, we would say that MP3is the physically implemented coupling matrix
MPhys. If we take a closer look at the solutions, we observe that for MP5and
MP6the cross-couplings (M14 and M58) are non-negative. This means thatMP5
and MP6 are not physical for the considered quadruplet filter, since the cross-
coupling are implemented as electric couplings which have the opposite sign of
the other couplings (Section 3.6).
To determine the physical solution MPhys amongst the other 4 solutions, one
could try to link the physical dimensions of the filter to the extracted couplings.
In this case we have for example that d14 > d58, which makes it likely that
|M14| < |M58|. Therefore one would expect MP1 or MP4 to correspond to
the physically implemented coupling matrix. It is however hard to discriminate
between those 2 solutions since the frequency of z1 is very close to that of z2.
5.2 CASCADED TRISECTION AND QUADRUPLET TOPOLOGIES 111

5.3 Identification of the Physically Implemented Coupling Matrix
This section explains the 2 phases of the identification method. The initialization
phase determines the physical coupling matrix for the initial design. The idea
behind the initialization is to first determine which of the sections (and thus
the blocks in the coupling matrix) are responsible for which TZs by adjusting
these sections separately. Once the physical matrix of the initial design M0Phys
is determined, the method tracks the physical solution(s) for the filter adjusted
during the tuning process by predicting the variations of the couplings. This
prediction is carried out using the design curves discussed in Chapter 3.
5.3.1 INITIALIZATION PHASE
The initialization phase heavily uses of the fact that one section only acts on a
specific set of TZs. This means that when we apply a variation to a physical
design parameter within a certain section, the TZs created by the other sections
remain unchanged. The blocks representing these sections must thus also remain
unchanged under this variation. By comparing the blocks (sub-matrices) linked
to the sections that should remain unchanged due to the applied variation in the
set of possible solutions, it is possible to determine MPhys.
Consider a filter consisting of 2 sections having nS solutions to the reconfigura-
tion problem. For the initial design values of the filter, the extraction procedure
yields nS possible coupling matrices. Next we apply a variation to a physical
parameter in the first section and we simulate the adapted structure. The ex-
traction procedure yields nS new coupling matrices. Since the variation only acts
on the first section, it only affects the TZs created by this section. Therefore the
block representing the second section should remain unchanged. The elements
of the block representing the second section are grouped in a new matrix (a
sub-matrix of the N ×N coupling matrix), which is denoted as Sxv . The index
x indicates the simulation (x ∈ 1, 2) and v indicates the index of the solution
(v ∈ 1, . . . , nS). We can now compare the matrices S1u and S2
v by calculating
the 2-norm of their difference:
δu,v =‖ S1u − S2
v ‖2 (5.3)
where (u, v ∈ 1, . . . , nS). Comparing all of the possible combinations requires
the calculation of n2S 2-norms. The combination (u, v) for which δu,v is mini-
mal corresponds to the pair of solutions for which the second blocks remained
maximally unaffected and thus to the pair of physically implemented coupling
112 CHAPTER 5 DEALING WITH MULTIPLE SOLUTIONS: A SIMULATION BASED STRATEGY

matrices.
It is possible to generalize this rationale for cascaded coupling topologies having
p different sections. In the generalized version, we first apply physical variations
to all sections but the last. This simulation allows to determine the solutions for
which the last block remained unaffected. Next we apply physical variations in all
sections but the second last and last section. This simulation allows to determine
the solutions for which the last and second last block remained unaffected. We
repeat this action p− 1 times to determine the physically implemented coupling
matrix.
Initialization of the identification method for a CQ filter
We apply the initialization method to the initial design of the CQ filter discussed
in Section 5.2.1. We change the value of the distance between resonator 1 and 4
from d14 = 2.27 mm to d14 = 3 mm and simulate the new filter. Figure 5.2 shows
the effect of the parameter variation on |S21|. It is clear that the variation of
d14 only affects the position of z1 and z4. Next we calculate all of the 36 values
of δu,v. The minimal value is δ1,1 = 0.1192, which means that first solution
MP1 corresponds to MPhys. When the norms are sorted for increasing values,
the second value δ6,6 = 0.1543 is minimal. The maximal value is obtained for
δ3,4 = 2.1292.
0.85 0.9 0.95 1 1.05 1.1 1.15
−60
−40
−20
0
Frequency (GHz)
|S21|(
dB
)
Figure 5.2 |S21| for the initial dimension of the CQ filter (—) and after a variationof d14 = 2.27 mm → d14 = 3 mm (—).
5.3 IDENTIFICATION OF THE PHYSICALLY IMPLEMENTED COUPLING MATRIX 113

5.3.2 TRACKING PHASE
The drawback of the initialization phase is that it requires p − 1 extra EM-
simulations. We want however to minimize the number of EM-simulations re-
quired to tune the filter, since they represent the most-time consuming action
during the tuning procedure. Therefore we propose to use a different approach
once the initial M0Phys has been determined. The tuning of a filter is an iterative
process in which the physical dimensions are corrected at each iteration. In most
cases the initial dimensions have been determined using design curves relating
the couplings to one of the physical dimensions of the filter (Chapter 3). Al-
though these curves do not take into account the effects of all the dimensions on
the coupling parameters, they approximate the first order behavior of the inter-
resonator coupling as a function of the dominant design parameter well. These
curves thus allow to predict how the physical matrixMmPhys that will be found at
iteration m will vary in first order as a result of the corrected dimensions. Using
the design curves and the knowledge of the corrected dimensions, we calculate
a coupling matrix Mm+1Pred that predicts the values of the coupling for iteration
m + 1 starting from the values obtained in iteration m. Next we compare the
coupling matrices Mm+1Pi
(i ∈ 1, . . . , nS) extracted at iteration m + 1 to the
prediction matrix Mm+1Pred by calculating the 2-norm of the difference:
δm+1i =‖Mm+1
Pi−Mm+1
Pred ‖2 (5.4)
where i ∈ 1, . . . , nS. The solution Mm+1Pi
for which δm+1i is minimal is con-
sidered to correspond to Mm+1Phys.
The design curves extracted in Section 3.5 act as look-up tables where the cou-
pling for non-simulated values of the physical parameter are obtained by inter-
polation. To predict the effect of the variation of a geometrical parameter it is
convenient to have an analytic expression for these curves. Since the coupling
parameters behave smoothly in the region of interest and can be well approxi-
mated by quadratic polynomials [Amar 06], we estimate quadratic polynomials
in least-square senses from the data in the look-up table. Note that since we
only have curves for the inter-resonator couplings, we only take into account the
imaginary part of the inter-resonator coupling to calculate δni (5.4).
Tracking MmPhys for a CQ filter
Based on the comparison between the extracted matrix M0Phys and the target
coupling matrix, we adjust the dimensions of the initial filter. Figure 5.3 shows
114 CHAPTER 5 DEALING WITH MULTIPLE SOLUTIONS: A SIMULATION BASED STRATEGY

|S11| and |S21| for the filter having adjusted dimensions. The dashed curves
show the response for the initial design. Figure 5.4 shows the curves (and the
least-square quadratic approximation) that are used to predict the effect of the
corrected dimensions. The prediction matrix M1Pred is:
0 0.8480 0 −0.1741 0 0 0 0
0.8480 0 0.7684 0 0 0 0 0
0 0.7684 0 0.6023 0 0 0 0
−0.1741 0 0.6023 0 0.6378 0 0 0
0 0 0 0.6378 0 0.5103 0 −0.3834
0 0 0 0 0.5103 0 0.8868 0
0 0 0 0 0 0.8868 0 0.7564
0 0 0 0 −0.3834 0 0.7564 0
(5.5)
Next we calculate the 6 differences between this prediction matrix and the phys-
ical solution for the initial design values M0Phys δ
1i (i ∈ 1, . . . , nS):
[δ11 . . . δ1
6
]=
[0.0144 0.1602 0.7724 0.7770 0.1819 0.2638
] (5.6)
It is clear that the first element δ11 is minimal and thus M1
P1= M1
Phys:
0.5506 0.8509 0 −0.1624 0 0 0 0.0025
0.8509 0.3164 0.7669 −0.0375 0 0 0 −0.0030
0 0.7669 0.4514 0.6016 0 0 0 0
−0.1624 −0.0375 0.6016 0.3927 0.6321 0 0 0.0006
0 0 0 0.6321 0.4082 0.5183 0.1024 −0.3894
0 0 0 0 0.5183 0.1157 0.8937 0
0 0 0 0 0 0.8937 0.4796 0.7664
0 0 0 0 −0.3894 0 0.7664 0.5136
(5.7)
Comparing the values of the matrix (5.5) to (5.7) shows that M1Pred predicts
the coupling parameters well. Moreover Table 5.1 shows that the corresponding
coupling matrix is closer to the target coupling matrix than M0Phys. Looking
5.3 IDENTIFICATION OF THE PHYSICALLY IMPLEMENTED COUPLING MATRIX 115

0.85 0.9 0.95 1 1.05 1.1 1.15
−60
−40
−20
0
Frequency (GHz)
|S11|&|S
21|(
dB
)
Figure 5.3 |S11| (—) and |S21| (—) for the adjusted filter. The dashed curves showthe S-parameters of the initial design.
1 1.2 1.4 1.6 1.8 21
2
3
4
5
6
7
·10−2
d (mm)
Cou
pli
ng
Figure 5.4 Desgin curves relating the inter-resonator coupling to the design parameterd: kE for the electric coupling (o) and its quadratic approximation (+).kM for the magnetic coupling (+) and its quadratic approximation (o).kB for the mixed coupling (+) and its quadratic approximation (o).
at Figure 5.3 shows that the bandwidth of the filter is closer to the desired
bandwidth, which also shows that the filter is closer to the golden goal. Note that
the lengths of the resonators have not been adjusted yet during this generation
116 CHAPTER 5 DEALING WITH MULTIPLE SOLUTIONS: A SIMULATION BASED STRATEGY

which explains why the offsets have not changed that much.
Parameter Initial Iteration 1 TargetM12 0.9467 0.8509 0.8478M23 0.8549 0.7669 0.6896M34 0.6169 0.6016 0.5217M14 -0.2157 -0.1624 -0.1463M45 0.6656 0.6321 0.5328M56 0.5314 0.5183 0.4424M67 0.9410 0.8937 0.8218M78 0.8978 0.7664 0.7769M58 -0.3973 -0.3894 -0.3694M11 0.5780 0.5506 0M22 0.2656 0.3164 0M33 0.4738 0.4514 0M44 0.3833 0.3927 0M55 0.3863 0.4082 0M66 0.0267 0.1157 0M77 0.4558 0.4796 0M88 0.5494 0.5136 0
Table 5.1 Extracted and target coupling parameters for the initial design and theadjusted design after 1 iteration of the SOLR CQ filter.
5.4 Tuning of a CQ filter
We now use the identification method to tune the CQ filter introduced in Sec-
tion 4.8. The tuning is carried out ’manually’, meaning that the filter dimensions
are adjusted incrementally at each iteration based on a comparison between the
extracted and the target coupling matrix. Sometimes the adjustments are too
strong leading to an overshoot, sometimes they are too small leading to an
undershoot. The tuning procedure required 48 iterations to tune 19 physical
design parameters. The filter is implemented in a RT/duroid substrate with a
εr = 10.2 and a thickness of 1.27 mm. It is important to note that we have
first tuned the inter-resonator couplings and next we tuned the self-couplings.
During the tuning procedure, the filter is simulated for a realization with a
loss-less substrate and ideal conductors. The filter was simulated using ADS
Momentum [ADS 14] and 1 simulation takes around 8 min 30 s. The structure
was simulated for an infinite substrate and ground plane and with 60 mesh cells
per wavelength (of the shortest wavelength). Figure 5.5 shows the values for the
tuned design parameters in ADS. Figure 5.6 shows the layout of the filter in ADS
Momentum. Figure 5.7 shows |S11| and |S21| for the initial and final loss-less
5.4 TUNING OF A CQ FILTER 117

design together with the ideal response. The TZs are not exactly falling at the
correct golden goal positions due to the presence of the unavoidable parasitic
couplings.
Figure 5.5 Final design values for the tuned filter in ADS.
Figure 5.6 Layout of the filter in Momentum.
The final design is also simulated for the lossy substrate (tan δ = 0.0023). Fig-
ure 5.8 shows |S11| and |S21| for the final loss-less and lossy design together
with the ideal response. Inclusion of the substrate losses clearly degrades the
quality factors of the TZs and the insertion loss within the passband as could be
118 CHAPTER 5 DEALING WITH MULTIPLE SOLUTIONS: A SIMULATION BASED STRATEGY

expected. Table 5.2 contains the extracted and ideal coupling parameters. The
extracted coupling parameters for the final design are very close to those of the
target coupling matrix: the maximum difference between the couplings is less
than 0.02 for the inter-resonator couplings. Note that there are still parasitic
couplings present and that the self-couplings of the resonators are not zero. For
the lossy filter, the real part of the diagonal elements is no longer negligible.
Table 5.4 contains the extracted quality factors of the resonators, the quality
factor of resonator k is determined as Qk = 1FBW Re(Mkk) (2.40). Note that
(2.40) only holds if the real parts of the non-diagonal couplings are zero.
If we take a closer look at Table 5.2, we observe that the parasitic coupling M13
and M57 are not negligible. To have an idea of their effect on the S-parameters,
we have added them to the ideal (target) coupling matrix and calculated the
corresponding S-parameters. Figure 5.9 shows that these couplings heavily de-
teriorate the reflection coefficient in the passband. Nevertheless the tuned filter
fulfills the specifications. It must be noted that some self-couplings (M33 and
M66) are relatively large for the tuned filter. This implies that these non-zero
self-couplings compensate somehow for the presence of M13 and M57. In the
next chapter we will use this effect to re-optimize the target coupling matrix,
changing the golden goal to take into account the parasitic couplings in the
physical filter.
Measurements
The final design is fabricated and measured for verification using a Vectorial
Network Analyzer. Figure 5.10 shows a picture of the fabricated filter. The
measurements show that there is a frequency offset and also that there is more
insertion loss than is predicted by the EM-simulator (Figure 5.11). The fre-
quency offset is due to an underestimate of the relative dielectric constant εr of
the substrate. In the simulation a dielectric constant of 10.2 was used where the
physical substrate has a εr of 10.6. This explains the shift of the center frequency.
The increase of the insertion loss is due to the presence of the conductor loss
of the copper which was not included in the simulation. To take into account
for these effects, the same structure was simulated using the updated substrate
and conductor parameters. To take into account the loss of the copper strip, the
conductivity was set to be 5.8 MSm . We have also included the effect of a finite
thickness of the metal strip, because this affects the coupling between the lines.
The thickness of the metal was set 17.5 µm. Figure 5.11 shows that the simula-
tions and measurement now agree quite well. Table 5.3 contains the extracted
coupling parameters of the measured and re-simulated filters. Note that these
5.4 TUNING OF A CQ FILTER 119

Parameter Initial Final Loss-Less Final Lossy TargetMS1 0.9941 1.0452 1.0459 1.0416ML8 0.9920 1.0423 1.0431 1.0416M12 0.9467 0.8496 0.8493 0.8478M23 0.8549 0.6796 0.6812 0.6896M34 0.6169 0.5115 0.5120 0.5217M14 -0.2157 -0.1453 -0.1451 -0.1463M45 0.6656 0.5377 0.5385 0.5328M56 0.5314 0.4332 0.4317 0.4424M67 0.9410 0.8092 0.8089 0.8218M78 0.8978 0.7782 0.7775 0.7769M58 -0.3973 -0.3593 -0.3615 -0.3694M11 0.5780 -0.0115 -0.0093 0M22 0.2656 -0.0565 -0.0534 0M33 0.4738 0.1780 0.1662 0M44 0.3833 -0.0176 -0.0213 0M55 0.3863 -0.0070 -0.0073 0M66 0.0267 -0.1896 -0.2018 0M77 0.4558 0.0659 0.0715 0M88 0.5494 -0.0039 -0.0032 0M24 -0.0662 -0.1046 -0.0963 0M57 0.1388 0.0853 0.0907 0
Table 5.2 Extracted and target coupling parameters of the SOLR CQ filter.
are just estimation of the quality factors, since the real parts of the non-diagonal
couplings are not zero. The real parts of the non-diagonal couplings are 2 orders
of magnitude smaller than those of the diagonal elements. As expected the self-
couplings are still quite large, which is due to the frequency shift. Table 5.4
contains the extracted quality factors, which are much lower than in the case
where no metal loss was included as expected.
120 CHAPTER 5 DEALING WITH MULTIPLE SOLUTIONS: A SIMULATION BASED STRATEGY

0.92 0.96 1 1.04 1.08−40
−30
−20
−10
0
Frequency (GHz)
|S11|(
dB
)
(a) |S11| for the initial design (—), the final loss-less design (—) and the idealresponse (- - -)
0.92 0.96 1 1.04 1.08
−60
−40
−20
0
Frequency (GHz)
|S21|(
dB
)
(b) |S21| for the initial design (—), the final loss-less design (—) and the idealresponse (- - -)
Figure 5.7 |S11| and |S21| for the initial design, the final loss-less design and the idealresponse
5.4 TUNING OF A CQ FILTER 121

0.92 0.96 1 1.04 1.08−45
−35
−25
−15
−5
Frequency (GHz)
|S11|(
dB
)
(a) |S11| for the final lossy design (—), the final loss-less design (—) and the idealresponse (- - -)
0.92 0.96 1 1.04 1.08
−60
−40
−20
0
Frequency (GHz)
|S21|(
dB
)
(b) |S21| for the final lossy design (—), the final loss-less design (—) and the idealresponse (- - -)
Figure 5.8 |S11| and |S21| for the final lossy and loss-less design and the ideal response.
122 CHAPTER 5 DEALING WITH MULTIPLE SOLUTIONS: A SIMULATION BASED STRATEGY

0.92 0.96 1 1.04 1.08−40
−30
−20
−10
0
Frequency (GHz)
|S11|(
dB
)
(a) |S11| for the ideal coupling matrix with extra couplings added (—), the finalloss-less design (—) and the ideal response (- - -)
0.92 0.96 1 1.04 1.08
−60
−40
−20
0
Frequency (GHz)
|S21|(
dB
)
(b) |S21| for the ideal coupling matrix with extra couplings added (—), the finalloss-less design (—) and the ideal response (- - -)
Figure 5.9 |S11| and |S21| for the ideal coupling matrix with extra couplings added,the final loss-less design and the ideal response
5.4 TUNING OF A CQ FILTER 123
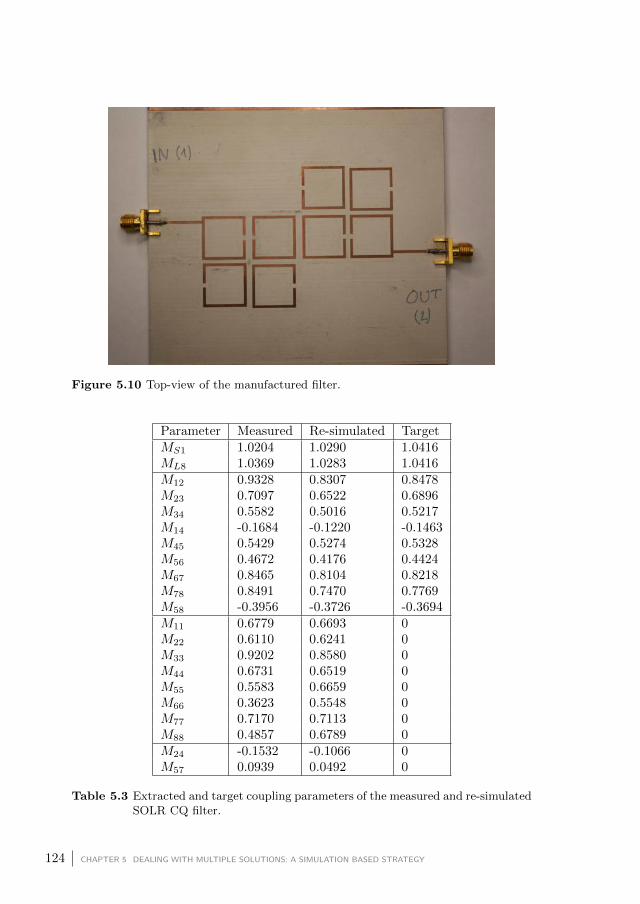
Figure 5.10 Top-view of the manufactured filter.
Parameter Measured Re-simulated TargetMS1 1.0204 1.0290 1.0416ML8 1.0369 1.0283 1.0416M12 0.9328 0.8307 0.8478M23 0.7097 0.6522 0.6896M34 0.5582 0.5016 0.5217M14 -0.1684 -0.1220 -0.1463M45 0.5429 0.5274 0.5328M56 0.4672 0.4176 0.4424M67 0.8465 0.8104 0.8218M78 0.8491 0.7470 0.7769M58 -0.3956 -0.3726 -0.3694M11 0.6779 0.6693 0M22 0.6110 0.6241 0M33 0.9202 0.8580 0M44 0.6731 0.6519 0M55 0.5583 0.6659 0M66 0.3623 0.5548 0M77 0.7170 0.7113 0M88 0.4857 0.6789 0M24 -0.1532 -0.1066 0M57 0.0939 0.0492 0
Table 5.3 Extracted and target coupling parameters of the measured and re-simulatedSOLR CQ filter.
124 CHAPTER 5 DEALING WITH MULTIPLE SOLUTIONS: A SIMULATION BASED STRATEGY
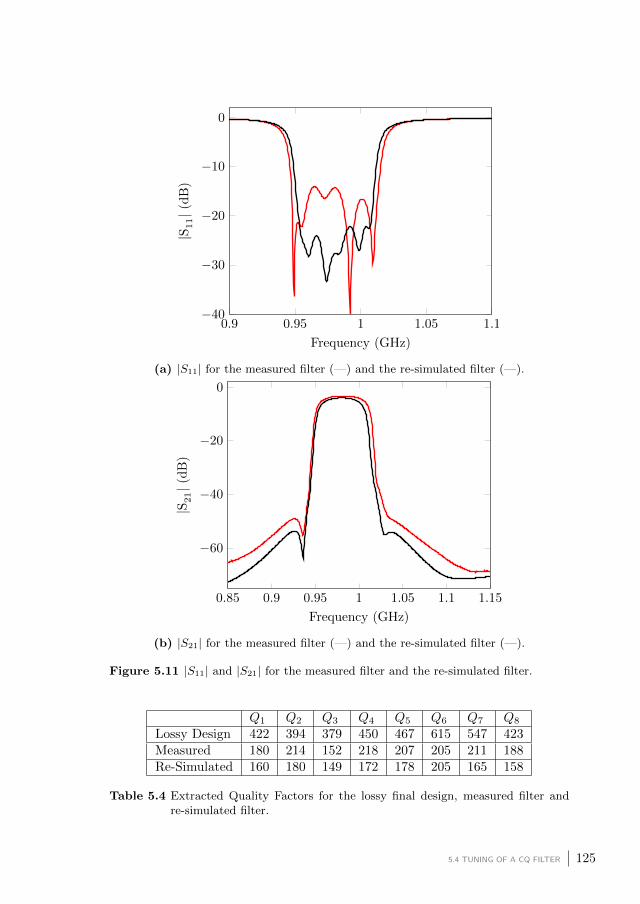
0.9 0.95 1 1.05 1.1−40
−30
−20
−10
0
Frequency (GHz)
|S11|(
dB
)
(a) |S11| for the measured filter (—) and the re-simulated filter (—).
0.85 0.9 0.95 1 1.05 1.1 1.15
−60
−40
−20
0
Frequency (GHz)
|S21|(
dB
)
(b) |S21| for the measured filter (—) and the re-simulated filter (—).
Figure 5.11 |S11| and |S21| for the measured filter and the re-simulated filter.
Q1 Q2 Q3 Q4 Q5 Q6 Q7 Q8
Lossy Design 422 394 379 450 467 615 547 423Measured 180 214 152 218 207 205 211 188Re-Simulated 160 180 149 172 178 205 165 158
Table 5.4 Extracted Quality Factors for the lossy final design, measured filter andre-simulated filter.
5.4 TUNING OF A CQ FILTER 125

5.5 Conclusion
This chapter presents a novel method to identify the physically implemented
coupling matrix for CT and CQ filters. The example illustrates the utility of
the method during the tuning of cascaded topology filters. There are however
some limitations. Since the initialization phase is based on the specific relation
between the TZs and the quadruplets (or triplets), the method is limited to
this kind of topologies. When dealing with other topologies having multiple
solutions such as extended box topologies [Came 07a], the initialization procedure
must be adapted. Moreover when the number of sections grows, the number of
simulations to initialize the method grows as well which is disadvantageous when
the simulation time is high.
Once the M0Phys has been determined, the quadratic approximation of the de-
sign curves allows to predict the variations of the inter-resonator couplings with
sufficient accuracy. Note that we only track the inter-resonator coupling and
thus do not take into account the effect of parasitic couplings and self-couplings.
The quality of MPred thus heavily depends on the quality of the design curves
and the hypothesis that the inter-resonator couplings are mainly affected by the
distances between the resonators.
In order to avoid an exhaustive search among the possible solutions an alternative
approach could be to impose the target topology and use an optimization-based
method to extract the coupling parameters. A possible cost function in this case
is the distance between the imposed target matrix and the extracted coupling
parameters. To obtain an extracted coupling matrix at the beginning of the
tuning procedure a criterion must be assigned such that the extracted coupling
matrix has the same nature as the target matrix. If we consider for example
the case of two cascaded quadruplets, we can order the imaginary parts of the
extracted TZs in ascending order. As a criterion we can then assign the first
and last TZs to the first quadruplet and the second and third TZs to the sec-
ond quadruplet. Obviously this criterion must also hold for the target coupling
matrix. The benefits of such an approach are that we avoid the necessity of
multiple simulations and that the computations are faster. The main drawback
is that there is no guaranteed optimization convergence.
The tuning procedure used in Section 5.4 can be improved as well. In the
next chapter we present an automated tuning procedure which is based on the
Jacobian of the function that maps the coupling parameters to the physical
dimensions.
126 CHAPTER 5 DEALING WITH MULTIPLE SOLUTIONS: A SIMULATION BASED STRATEGY

6Electromagnetic Optimization of Microstrip Bandpass Filters based on
Adjoint Sensitivity Analysis
This chapter introduces a novel computer-aided tuning (CAT) or optimization
method for coupled resonator microwave bandpass filters. The method is based
on the estimation of the Jacobian of the function that relates the geometrical
design parameters of the filter to the physically implemented coupling param-
eters. The Jacobian is estimated by combining the adjoint sensitivity of the
S-parameters with respect to the coupling parameters on the one hand and the
adjoint sensitivity of the S-parameters with respect to the physical filter design
parameters on the other hand.
Formal expressions exist to calculate the adjoint sensitivities of the S-parameters
with respect to the circuit parameters using the values of the extracted coupling
parameters only. Lately commercial EM-simulators, such as CST Microwave
Studio [CST 15], provide the adjoint sensitivities of the S-parameters with re-
spect to the geometrical or substrate parameters of the filter. One EM-simulation
therefore suffices to estimate the Jacobian. In the case of coupling topologies
with multiple solutions, the Jacobian is estimated for each solution separately.
This still requires only one EM-simulation. We present a criterion to determine
the physical solution using the estimated Jacobian matrices.
The tuning procedure first calculates the difference between the physically im-
plemented coupling matrix and the golden goal. Next it uses this difference
together with the Pseudo-inverse of the Jacobian, to obtain corrections for the
geometrical parameters. This process is repeated iteratively until the corrections
become sufficiently small with respect to a user specified goal. The CAT method
is applied to the design of a cascaded triplet (CT) and a single quadruplet (SQ)
microstrip filter.
127

6.1 Introduction
Over the last years various automated CAT methods have been developed to
optimize the physical dimensions (design parameters) of coupled resonator mi-
crowave bandpass filters. Some methods optimize a cost function based on the
values of S-parameters simulated at some well-chosen frequencies [Band 94b;
Arnd 04]. Other methods use a cost function based on the positions of the
poles and the zeros which are estimated starting from a rational model of the
S-parameters [Koza 02]. A third approach optimizes a cost function based on
the extracted coupling matrix [Lamp 04; Koza 06]. These methods share the
same time-consuming step which is the EM-simulation of the filter. Therefore
one of the main challenges is to reduce the number of EM-simulations needed to
tune the filter.
The coupling matrix based methods in [Lamp 04; Koza 06] correct the physical
dimensions using the Jacobian of the function that maps these parameters to the
extracted coupling parameters. The Jacobian matrix is estimated numerically
using forward differences. This estimation requires ng EM-simulations, where
ng is the number of physical design parameters of the filter. At each iteration
of the tuning method, the Jacobian is updated. The updates use the Broy-
den method [Broy 65] to reduce the required number of EM-simulations. The
methods discussed in [Lamp 04; Koza 06] all converge to a tuned design that
meets the specifications with a very low number of required EM-simulations.
Nevertheless the initial estimate still requires a high number of EM-simulation,
especially in the case of filters having a large number of design parameters.
Another shortcoming that is common to the current methods is that they do
not handle coupling topologies with multiple possible solutions.
The CAT method introduced in this chapter, estimates the Jacobian differ-
ently. It combines the adjoint sensitivity of the S-parameters with respect to
the coupling parameters on the one hand and the adjoint sensitivity of the S-
parameters with respect to the physical filter design parameters on the other
hand. Section 6.2 derives formal expressions to calculate the adjoint sensitivities
of the S-parameters with respect to the circuit parameters using the values of
the extracted coupling parameters only. Lately, commercial EM-simulators such
as CST Microwave Studio [CST 15] provide the adjoint sensitivities of the S-
parameters with respect to the geometrical or substrate parameters of the filter
without drastically increasing the simulation time. One EM-simulation therefore
suffices to estimate the Jacobian. Moreover, the Jacobian is re-estimated at each
iteration of the tuning procedure hereby improving the accuracy of the tuning.
128 CHAPTER 6 ELECTROMAGNETIC OPTIMIZATION OF MICROSTRIP BANDPASS FILTERS BASED ON ADJOINT
SENSITIVITY ANALYSIS

The method identifies the physically implemented coupling matrix whenever
non-canonical topologies are considered, again using only one EM-simulation.
One simulation suffices to estimate the Jacobian for each admissible solution.
Jacobian-based tuning the physical parameters requires one to determine their
Jacobian of the function relating the physical design parameters to the couplings
in the physical realization. The idea is that in a physical design, a coupling
parameter is mainly affected by a specific prior-known set of design parameters.
As a consequence the partial derivatives of the coupling parameter with respect
to these parameters are larger than the partial derivatives with respect to the
other design parameters having a second order effect at most. This assumption
allows one to predict which elements of the Jacobian are dominant in the case
that the underlying relation correspond to the physical relation. Selection of the
Jacobian of the physical relation boils down to finding the Jacobian for which
those elements are dominant. Note however that a single EM-simulation with the
determination of the Jacobian requires more time, since the adjoint sensitivities
are computed as well.
Section 6.6 explains the operation of the tuning method. Basically it calcu-
lates the corrections for the geometrical parameters using the difference between
the physically implemented coupling matrix and the target matrix and uses
the Pseudo-inverse [Ben 03] of the Jacobian to calculate the estimation of the
compensation to be applied. Thereto, the method minimizes the 2-norm of the
difference between the implemented and the target coupling parameters.
The physical dimensions are adjusted iteratively until the necessary corrections
become smaller than a user specified value. Section 6.7 applies the tuning
method to the design of a cascaded trisection filter. Section 6.8 applies the
tuning method to the design of a quadruplet filter. This design is more challeng-
ing due to the presence of parasitic couplings. The effect of the parasitics on the
response is much greater here as it is in the CT case. To take this into account
we re-optimize the target matrix (golden goal) during the tuning method as well.
Section 6.5 explains how this re-optimization of the target matrix is performed.
6.2 Adjoint Sensitivity of the S-parameters with respect to the CouplingParameters
In Section 2.6.2 we have derived equations to express the S-parameters as a
function of the inverse of the matrix A = jM +G+ jωIN+2. Here, the matrix
M contains the imaginary part of the extracted coupling matrix, the matrix G
contains the real part of the coupling matrix and the matrix IN+2 is an identity
6.2 ADJOINT SENSITIVITY OF THE S-PARAMETERS WITH RESPECT TO THE COUPLING PARAMETERS 129

matrix of size (N+2)×(N+2) whith the first and last elements on the diagonal
equal to 0. The S-parameters are obtained as follows:
S11 = 2[A−1]11 − 1
S12 = 2[A−1]1,N+2
S21 = 2[A−1]N+2,1
S22 = 2[A−1]N+2,N+2 − 1
(6.1)
where [A]kl denotes the element at position k, l of the matrix A. We now derive
a formal expression for∂Sij∂Mk,l
(ω). This represents the sensitivity of a scattering
parameter Sij with respect to a coupling parameter Mk,l taken at a certain
frequency ω. In Section 6.3 these sensitivities are used to estimate the Jacobian
of the functional relation between the physical filter parameters and the circuit
parameters. The sensitivities can be expressed as a function of A−1 . Remember
that the partial derivative of the inverse of a matrix A can be written as:
∂A−1
∂x= −A−1 ∂A
∂xA−1 (6.2)
Applying (6.2) to the expressions given in (6.1) yields:
For l 6= k :
∂S11
∂Mlk= −4j([A−1]1,l[A
−1]1,k)
∂S21
∂Mlk= −2j([A−1]N+2,l[A
−1]k,1 + [A−1]1,k[A−1]l,N+2)
∂S22
∂Mlk= −4j([A−1]N+2,l[A
−1]N+2,k)
For l = k :
∂S11
∂Mll= −2j[A−1]21,l
∂S21
∂Mll= −2j[A−1]1,l[A
−1]l,N+2
∂S22
∂Mll= −2j[A−1]2N+2,l
(6.3)
130 CHAPTER 6 ELECTROMAGNETIC OPTIMIZATION OF MICROSTRIP BANDPASS FILTERS BASED ON ADJOINT
SENSITIVITY ANALYSIS
These expressions are the same as the ones derived in [Mart 12]. Moreover they
are equivalent to those found in [Amar 00a] where the dual circuit based on
impedance inverters and series inductors is used
6.3 Estimation of the Jacobian Matrix J
The tuning procedure is based on the relation between the geometrical design
parameters and the extracted coupling parameters describing the physical im-
plementation of the filter. The coupling matrix is extracted using the extraction
method described in Chapter 4. Assume that there are ng geometrical parame-
ters g and nc coupling parameters m. The relation between them is represented
by:
f(g) = m (6.4)
where g is a real vector of size ng×1 containing the geometrical parameters and
m is a pure imaginary vector of size nc × 1 containing the extracted coupling
parameters. As discussed in Section 4.5 the extracted coupling matrix contains
coupling parameters that are considered as first order effects (inter-resonator
couplings and self-couplings) and parameters that are considered as second order
effects (parasitic couplings). Since the optimization aims to tune the first order
effects, the vector m does not contain these parasitic couplings. The Jacobian
matrix J of f(g) is estimated by combining the adjoint sensitivities of the S-
parameters.
Commercial EM-simulators such as Computer Simulation Technology (CST)
[CST 15], provide the adjoint sensitivities of the S-parameters with respect
to the geometrical parameters as a function of the frequency. Combining this
information with the adjoint sensitivity of the S-parameters with respect to the
extracted coupling parameters parameters (calculated using (6.3)) results in an
estimate of the Jacobian of f(g).
The sensitivity of Sij with respect to a single geometrical parameter gs can be
written as
∂Sij∂gs
(ω) =
nc∑
k=1
∂Sij(ω)
∂mk
∂mk
∂gs(6.5)
where∂Sij∂mk
is the adjoint sensitivity of Sij with respect to the kth circuital
6.3 ESTIMATION OF THE JACOBIAN MATRIX J 131
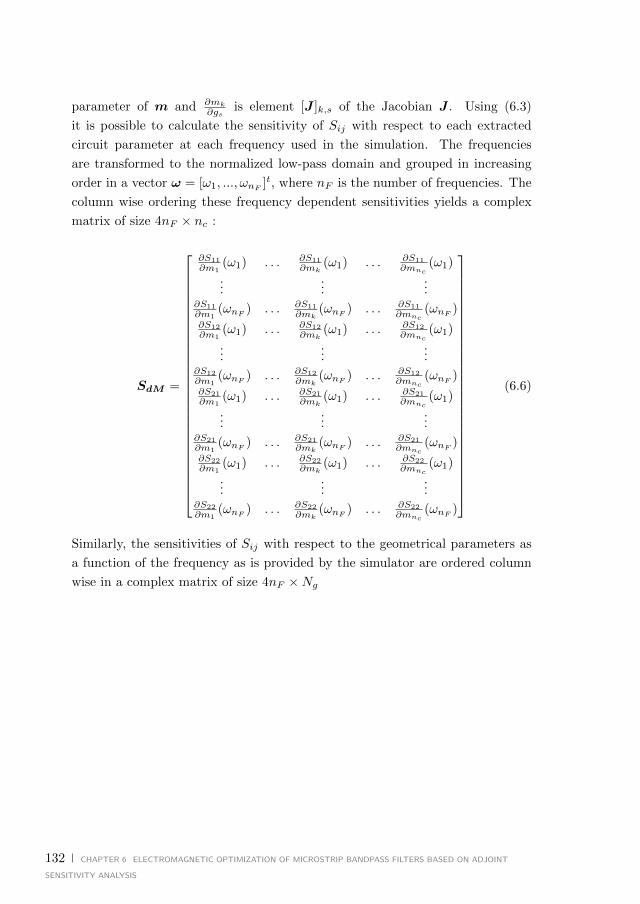
parameter of m and ∂mk∂gs
is element [J ]k,s of the Jacobian J . Using (6.3)
it is possible to calculate the sensitivity of Sij with respect to each extracted
circuit parameter at each frequency used in the simulation. The frequencies
are transformed to the normalized low-pass domain and grouped in increasing
order in a vector ω = [ω1, ..., ωnF ]t, where nF is the number of frequencies. The
column wise ordering these frequency dependent sensitivities yields a complex
matrix of size 4nF × nc :
SdM =
∂S11
∂m1(ω1) . . . ∂S11
∂mk(ω1) . . . ∂S11
∂mnc(ω1)
......
...∂S11
∂m1(ωnF ) . . . ∂S11
∂mk(ωnF ) . . . ∂S11
∂mnc(ωnF )
∂S12
∂m1(ω1) . . . ∂S12
∂mk(ω1) . . . ∂S12
∂mnc(ω1)
......
...∂S12
∂m1(ωnF ) . . . ∂S12
∂mk(ωnF ) . . . ∂S12
∂mnc(ωnF )
∂S21
∂m1(ω1) . . . ∂S21
∂mk(ω1) . . . ∂S21
∂mnc(ω1)
......
...∂S21
∂m1(ωnF ) . . . ∂S21
∂mk(ωnF ) . . . ∂S21
∂mnc(ωnF )
∂S22
∂m1(ω1) . . . ∂S22
∂mk(ω1) . . . ∂S22
∂mnc(ω1)
......
...∂S22
∂m1(ωnF ) . . . ∂S22
∂mk(ωnF ) . . . ∂S22
∂mnc(ωnF )
(6.6)
Similarly, the sensitivities of Sij with respect to the geometrical parameters as
a function of the frequency as is provided by the simulator are ordered column
wise in a complex matrix of size 4nF ×Ng
132 CHAPTER 6 ELECTROMAGNETIC OPTIMIZATION OF MICROSTRIP BANDPASS FILTERS BASED ON ADJOINT
SENSITIVITY ANALYSIS
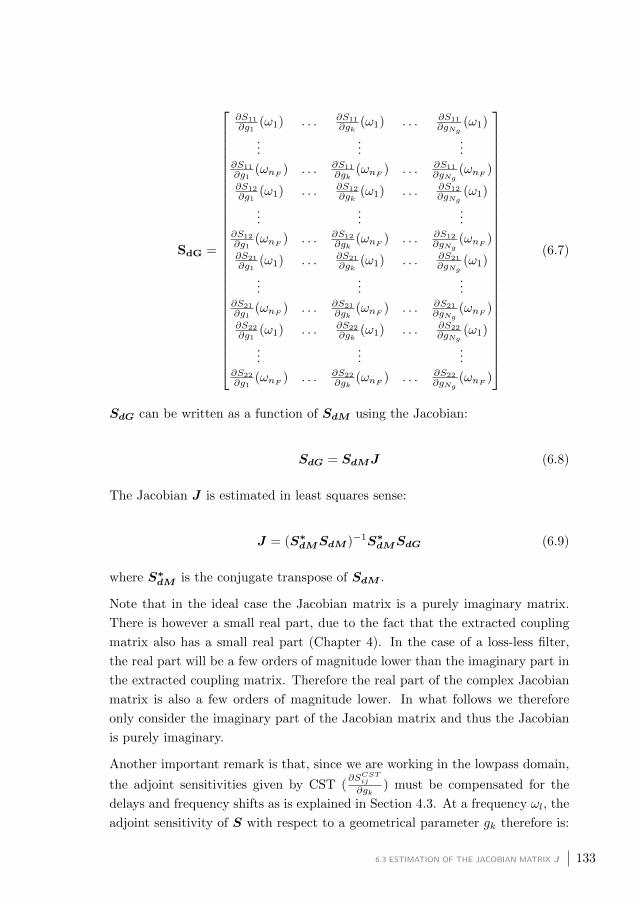
SdG =
∂S11
∂g1(ω1) . . . ∂S11
∂gk(ω1) . . . ∂S11
∂gNg(ω1)
......
...∂S11
∂g1(ωnF ) . . . ∂S11
∂gk(ωnF ) . . . ∂S11
∂gNg(ωnF )
∂S12
∂g1(ω1) . . . ∂S12
∂gk(ω1) . . . ∂S12
∂gNg(ω1)
......
...∂S12
∂g1(ωnF ) . . . ∂S12
∂gk(ωnF ) . . . ∂S12
∂gNg(ωnF )
∂S21
∂g1(ω1) . . . ∂S21
∂gk(ω1) . . . ∂S21
∂gNg(ω1)
......
...∂S21
∂g1(ωnF ) . . . ∂S21
∂gk(ωnF ) . . . ∂S21
∂gNg(ωnF )
∂S22
∂g1(ω1) . . . ∂S22
∂gk(ω1) . . . ∂S22
∂gNg(ω1)
......
...∂S22
∂g1(ωnF ) . . . ∂S22
∂gk(ωnF ) . . . ∂S22
∂gNg(ωnF )
(6.7)
SdG can be written as a function of SdM using the Jacobian:
SdG = SdMJ (6.8)
The Jacobian J is estimated in least squares sense:
J = (S∗dMSdM )−1S∗
dMSdG (6.9)
where S∗dM is the conjugate transpose of SdM .
Note that in the ideal case the Jacobian matrix is a purely imaginary matrix.
There is however a small real part, due to the fact that the extracted coupling
matrix also has a small real part (Chapter 4). In the case of a loss-less filter,
the real part will be a few orders of magnitude lower than the imaginary part in
the extracted coupling matrix. Therefore the real part of the complex Jacobian
matrix is also a few orders of magnitude lower. In what follows we therefore
only consider the imaginary part of the Jacobian matrix and thus the Jacobian
is purely imaginary.
Another important remark is that, since we are working in the lowpass domain,
the adjoint sensitivities given by CST (∂SCSTij
∂gk) must be compensated for the
delays and frequency shifts as is explained in Section 4.3. At a frequency ωl, the
adjoint sensitivity of S with respect to a geometrical parameter gk therefore is:
6.3 ESTIMATION OF THE JACOBIAN MATRIX J 133

[∂S11
∂gk(ωl)
∂S12
∂gk(ωl)
∂S21
∂gk(ωl)
∂S22
∂gk(ωl)
]=
[ej(ωlα11+β11) ∂S
CST11
∂gk(ωl) ej(ωl
α11+α222 +
beta11+β222 ) ∂S
CST12
∂gk(ωl)
ej(ωlα22+β22) ∂SCST22
∂gk(ωl) ej(ωl
α11+α222 +
beta11+β222 ) ∂S
CST21
∂gk(ωl)
] (6.10)
6.4 Determination of the Physically Implemented Coupling Matrix
In the case of coupling topologies supporting nS different possible solutions, the
extraction procedure yields nS different vectors mp (p ∈ 1, . . . , nS). This
means nS equivalent functions fp relate the design parameters g to the coupling
parameters mp. Among them only one function fPhys relates g to the physically
implemented coupling parameters mPhys.
To identify fPhys among all others, we assume that in a physical design a specific
coupling is mainly determined by a specific set of physical parameters and that it
is possible to determine which physical parameters influence the couplings most.
This assumption is also implicitly made during the initial dimensioning of the
filter. Remember that second order effects, such as loading of the resonators,
are also neglected there (Chapter 3). One can therefore predict which partial
derivatives ∂mk∂gs
are dominant for the physical design. These derivatives corre-
spond to the dominant elements of the Jacobian matrix JPhys of fPhys. Let V
denote the set of indexes corresponding to these elements. For each estimated
Jp, the relative influence of these predicted elements is calculated:
cp =
∑k,l∈V [Jp]
2l,k∑nc
m=1
∑ngn=1[Jp]2m,n
(6.11)
Here [Jp]l,k denotes the imaginary part of the element at position (l, k) of the
matrix Jp. In the set of equivalent Jacobian matrices one selects the matrix
for which cp is maximal. This matrix corresponds to the solution for which
the design parameters have the expected dominant main effects on the coupling
parameters. This solution can then safely be assumed to be the physical one. In
what follows we denote the physical function fPhys, the associated implemented
parameters mPhys and Jacobian JPhys as f , m and J respectively to make the
notation more readable.
134 CHAPTER 6 ELECTROMAGNETIC OPTIMIZATION OF MICROSTRIP BANDPASS FILTERS BASED ON ADJOINT
SENSITIVITY ANALYSIS

6.5 Re-optimization of the Target Coupling Matrix
The presence of parasitic couplings can heavily deteriorate the performance of
the filter, even when the other inter-resonator and self-couplings correspond
to the requested target values. For the example discussed in Section 5.4, the
presence of the parasitic couplings M13 and M57 ruins the behavior of S11 in the
passband (Figure 5.9). It is however possible to compensate for this effect when
using the presence of non-zero diagonal elements. This can result in a final
filter, that meets the specification. In this section we propose to re-optimize
the target coupling matrix taking into account the presence of the observed
parasitic effects. We minimize the difference between reflection and transmission
coefficients created by the coupling matrix containing the parasitic elements and
the target values of reflection and transmission coefficients evaluated at a finite
number of frequencies.
We choose these frequencies in the passband for the reflection coefficient and
around the TZs for the transmission coefficient. We denote the target coupling
matrix with the observed coupling parameters added as Mpar,0 and the target
coupling matrix as Mid. We denote the response created by Mpar,0 as Spar,0kl
and the target response as Sidkl (k, l ∈ 1, 2). We now optimize the diagonal
elements of the matrixMpar,i to compensate the effect of the parasitic couplings.
The index i denotes the iteration and Spar,ikl is the response created by M tarpar,i.
The least squares cost function that is minimized is:
cpar,i =
√√√√nf11∑
f11=1
|Spar,i11 (ωf11)− Sid11(ωf11
)|2 +
nf21∑
f21=1
|Spar,i21 (ωf21)− Sid21(ωf21
)|2
(6.12)
where ωf11(f11 ∈ 1, . . . , nf11
) are the lowpass frequencies chosen in the pass-
band and ωf21 (f21 ∈ 1, . . . , nf21) are the lowpass frequencies chosen in the
vicinity of the TZs at finite frequencies. Similarly to Section 4.6 , the minimizer
of (6.12) is calculated using the Matlab function fminunc, which calculates the
minimum for an unconstrained multi-variable scalar function. Note that only
the diagonal elements of Mpar,i are varied during the optimization. We denote
the re-optimized target matrix as Mre
In the examples considered in this work, the inter-resonator couplings are mainly
affected by the distances between the resonators and the self-couplings by the
distances between the ends of the resonators. We assume that the parasitic cou-
6.5 RE-OPTIMIZATION OF THE TARGET COUPLING MATRIX 135

plings are mainly affected by the inter-resonator distances. In the case of strong
parasitic couplings, we first tune the filter until the inter-resonator distances
yield the target inter-resonator couplings. Next we re-optimize the target matrix
diagonal by taking into account the observed parasitic couplings by minimizing
cpar,i (6.12). We continue to tune the filters towards the newly found target
matrix Mre.
6.6 Tuning Method
6.6.1 CORRECTION OF THE DESIGN PARAMETERS
The optimization method calculates the update for the design parameters g such
that the corresponding circuital parameters f(g) = m coincide maximally with
the target coupling parameters m of the golden goal. Evaluating the function
f for the initial design parameters g0 yields the difference between the circuital
parameters of the initial design m0 and the target parameters m which allows
to evaluate the design error:
∆m0 = m− f(g0) (6.13)
The corrections of g0 necessary to improve the filter response are therefore read-
ily obtained as:
∆g0 = g1 − g0 = f−1(mo + ∆m0)− g0 (6.14)
where g1 are the design parameters of the improved filter. A linear approxima-
tion of f using the estimated Jacobian J0 evaluated at g0 yields:
m1 = f(g1) ≈ J0∆g0 +m0 (6.15)
Expression (6.15) approximates the correction of the design parameters using
the pseudo-inverse of the Jacobian J−10 :
∆g0 ≈ J−10 ∆m0 (6.16)
A simulation of the updated filter response yields the coupling parameters m1
136 CHAPTER 6 ELECTROMAGNETIC OPTIMIZATION OF MICROSTRIP BANDPASS FILTERS BASED ON ADJOINT
SENSITIVITY ANALYSIS

and the Jacobian J1 in the same way as above. Repeating the process above then
allows to refine the correction until the necessary corrections become sufficiently
small:
‖ ∆gk ‖∞= maxl
[∆gk]l < δcorr (6.17)
where δcorr is a user-defined value. Since there is no point in calculating geo-
metrical parameters more precisely than the limits imposed by the fabrication
tolerance, a valid choice for δcorr is readily found to be the accuracy of the fabri-
cation process. For all considered examples, the optimization method converges
after a number of iterations smaller than the number of design parameters to be
tuned.
When the parasitic couplings heavily influence the response, we tune the filter
until the corrections for the inter-resonator distances become smaller than δcorr.
To this end, we order the inter-resonator couplings in a vector gdk. Next we re-
optimize the target coupling matrix as discussed in Section 6.5 and order them
into a vector mre.
6.6.2 OPTIMIZATION ALGORITHM
1. Approximation of a frequency template to obtain the ideal rational scat-
tering matrix that fulfills the specifications (Chapter 2)
2. Synthesis of the target coupling matrix M (the couplings are ordered in a
vector m). In the case of multiple solutions, one solution is chosen as the
target matrix
3. Computation of the initial design parameters gk of the filters’ physical
implementation, where k = 0 (Chapter 3)
4. Full-wave EM-simulation of the filters S-parameters in the frequency band
of interest and the adjoint sensitivities of the S-parameters with respect
to the design parameters gk
5. Extraction of the coupling parameters (Chapter 4):
(a) Rational approximation of the simulated S-parameters.
(b) Coupling matrix synthesis
(c) Determination of all the possible solutions corresponding to the im-
plemented coupling topology
6.6 TUNING METHOD 137

6. Estimation of the Jacobian of the couplings with respect to the physical
parameters for each solution and determination of the physically imple-
mented coupling matrix using expression (6.11) (Section 6.3)
7. Computation of the error of the circuit parameters ∆mk (Section 6.6.1)
8. Estimation of the correction for the design parameters ∆gk ≈ J−1k ∆mk
9. Case of strong parasitics: re-optimize the target to obtain mre if
‖ ∆gdk ‖∞< δcorr
10. Termination of the optimization process if ‖ ∆gk ‖∞< δcorr
11. Update of the design parameters: gk+1 = gk + ∆gk and return to step 4
6.7 Tuning of a CT filter
In this section the tuning method is applied to the design of a 6th order CT
filter. The filter is designed to have center frequency fc = 1.2 GHz, a fractional
bandwidth FBW = 0.04, a minimum return loss RL of 22 dB and 2 finite
transmission zeros (TZs) at ω = 1.15 and ω = 2.1. The target coupling matrix is
synthesized using Dededale-HF [Seyf 00]. There are 2 solutions to the reduction
problem of which one is chosen (arbitrarily). The chosen target coupling matrix
is:
0 1.0422 0 0 0 0 0 0
1.0422 0.0394 0.8355 0.2745 0 0 0 0
0 0.8355 −0.3377 0.5789 0 0 0 0
0 0.2745 0.5789 0.1138 −0.5986 0 0 0
0 0 0 −0.5986 0.1349 0.3544 0.6483 0
0 0 0 0 0.3544 −0.8252 0.5942 0
0 0 0 0 0.6483 0.5942 0.0394 1.0422
0 0 0 0 0 0 1.0422 0
(6.18)
In the chosen solution, the first triplet realizes the TZ at ω1 = 2.1 and the second
one the TZ at ω2 = 1.15
The filter is implemented on a RO4360 substrate with a thickness of 1.016 mm
and εr = 6.15. To implement the λ2 -resonators we use a variation of the SOLR
resonator, which is not square but rectangular. Figure 6.1 shows the top-view
138 CHAPTER 6 ELECTROMAGNETIC OPTIMIZATION OF MICROSTRIP BANDPASS FILTERS BASED ON ADJOINT
SENSITIVITY ANALYSIS

Figure 6.1 Top-view of the layout of a sixth order cascaded triplet filter.
of the layout of the CT filter. Table 6.1 contains the initial dimensions of the
filter. There are 15 design parameters which are the spacing dkl between the
resonators k and l and the distance between the ends gi of the resonator i. Note
that the positions of the feeding lines ti are also design parameters. They are
however not included in the optimization method, since CST is not capable to
calculate the adjoint sensitivity with respect to a parameter that influences the
position of a port. Therefore these parameters have to be tuned manually.
Figure 6.2 shows the S-parameters of the initial design. Note that the initial
design is far away from the target design. We did not use design curves to
obtain initial values for the mixed couplings M12, M23, M45 and M56 but we
have chosen values within the range of values found for the other spacings using
visual inspection.
The coupling matrices are extracted using the method described in Chapter 4.
There are 2 solutions to the reconfiguration problem and thus there are 2 possible
Jacobian matrices too. The parameters are ordered such that dominant elements
should be positioned on the main diagonal of the matrix. When we calculate
the relative influence of these dominant elements over the others for the first
iteration, we find the following values for cp as defined in (6.11):
cp =[0.9104 0.2024
](6.19)
6.7 TUNING OF A CT FILTER 139

Physical parameter Initial Value (mm) Final Value (mm)a 16.7 16.7b 16.5 16.5w 1 1t1 4.6 4.6t2 4.6 4.6d12 0.6 0.74d23 1.4 1.16d13 2.1 1.9d34 2.2 2.74d45 1.5 1.71d56 1.4 1.05d46 1.3 1.37g1 0.75 0.61g2 1.1 0.8g3 0.65 0.47g4 0.6 0.48g5 1.3 1.22g6 0.75 0.55
Table 6.1 Initial and final values for the physical design parameters of the CT filter.
This indicates that the first solution corresponds to the physically implemented
coupling matrix. Table 6.2 contains the coupling parameters associated to the
initial design parameters.
Figure 6.3a compares the magnitude of the adjoint sensitivity ∂S11
∂M12(ω) obtained
using (6.3) to ∂S11
∂d12(ω) obtained using CST. Similarly, Figure 6.3b compares
the magnitude of the ∂S21
∂M12(ω) to ∂S21
∂d12(ω). We observe that the trend of the
sensitivity as a function of ω is very similar. This indicates that the S-parameters
vary similarly to a change of d12 and M12. There is however a difference since the
other geometrical parameters also act on M12. Figure 6.4 compares the adjoint
sensitivity of S11 with respect to d12 and M12 respectively in the complex plane.
Besides the difference in amplitude, we also observe a phase shift of −π rad.
This phase shift is due to the fact that in (6.3) the S-parameters are derived
with respect to Mkl instead of jMkl. If we compensate for this by multiplying∂Smn∂Mlk
by −j, we observe a similar phase behavior for both adjoint sensitivities.
140 CHAPTER 6 ELECTROMAGNETIC OPTIMIZATION OF MICROSTRIP BANDPASS FILTERS BASED ON ADJOINT
SENSITIVITY ANALYSIS
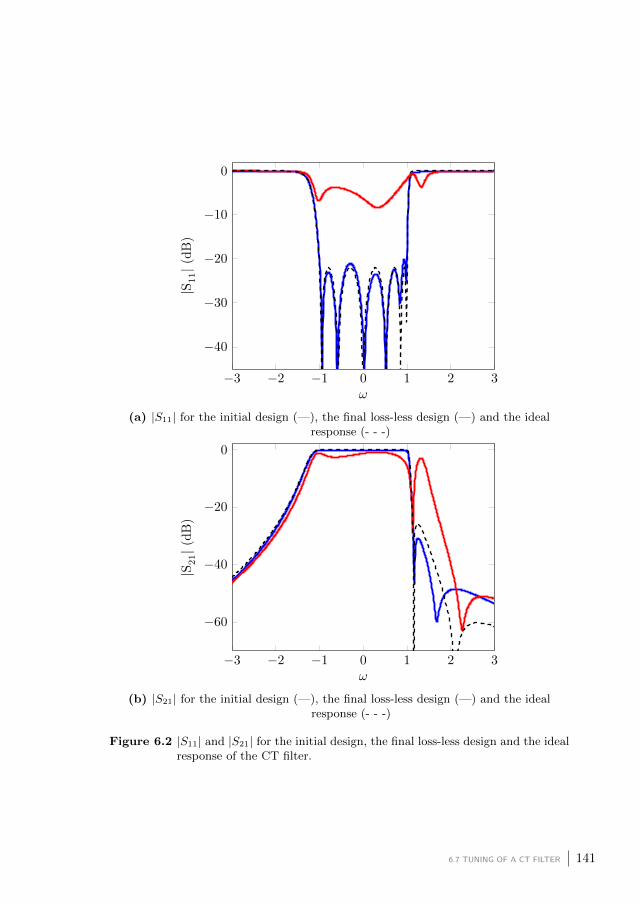
−3 −2 −1 0 1 2 3
−40
−30
−20
−10
0
ω
|S11|(
dB
)
(a) |S11| for the initial design (—), the final loss-less design (—) and the idealresponse (- - -)
−3 −2 −1 0 1 2 3
−60
−40
−20
0
ω
|S21|(
dB
)
(b) |S21| for the initial design (—), the final loss-less design (—) and the idealresponse (- - -)
Figure 6.2 |S11| and |S21| for the initial design, the final loss-less design and the idealresponse of the CT filter.
6.7 TUNING OF A CT FILTER 141

The elements of m and g are ordered such that the first row of the Jacobian
corresponds to the partial derivatives ∂M21
∂gs, s ∈ 1, . . . , 13, where gs is one of
the 13 geometrical design parameters. The first 7 elements of this row correspond
to the partial derivatives with respect to the spacing between the resonators:
[∂M21
∂d12
∂M21
∂d23
∂M21
∂d13
∂M21
∂d34
∂M21
∂d45
∂M21
∂d56
∂M21
∂d46
]=
[−0.7061 −0.0086 −0.1677 0.0529 −0.0050 −0.0121 0.0012
] (6.20)
It is clear that M12 mainly depends on d12 as expected. The negative sign of∂M21
∂d12also corresponds to what we physically expect: if the distance increases,
the coupling decreases and vice versa. The other parameter that mainly influ-
ences M12 is d13. This is logical since, d13 determines the offset of resonator 1
with respect to resonator 2. As expected M12 is mainly determined by design
parameters in the first triplet. The 6 last elements of this row in the Jacobian
correspond to the partial derivatives with respect to the spacing between the
ends of each resonator:
[∂M21
∂g1
∂M21
∂g2
∂M21
∂g3
∂M21
∂g4
∂M21
∂g5
∂M21
∂d56
]=
[0.0912 −0.0503 0.0058 −0.0191 0.0058 0.0012
] (6.21)
It is clear that M12 is mainly influenced by g1 and g2, which is consistent with
what we expect.
The value of δcorr was set to 0.01 mm and after 4 iterations (5 EM-simulations)
we found a ‖ ∆gk ‖∞= 0.01. On average, an EM-simulation takes 2 hours 30 min
(with adjoint sensitivities included). Note that the adaptive meshing is included
in this time and this already takes 1 hour. An EM-simulation without adjoint
sensitivities takes 2 hours 10 min on average, indicating that the extra time
that is needed to calculate the adjoint sensitivities is acceptable. Figure 6.5
shows the evolution of the inter-resonator couplings and of the self-coupling
during the tuning process. The figure shows that after 2 iterations, the coupling
parameters are already very close to the target values. The last 2 iterations
can be seen as fine tuning. Note that for clarity of the figure, we have not
taken into account the sign of the inter-resonator couplings. Figure 6.6a shows
the evolution of the 2-norm and the ∞-norm of the design error ∆m. Note
142 CHAPTER 6 ELECTROMAGNETIC OPTIMIZATION OF MICROSTRIP BANDPASS FILTERS BASED ON ADJOINT
SENSITIVITY ANALYSIS

−2 −1 0 1 2−10
0
10
20
ω
dS
11/d
g12
and
dS
11/d
M12
(dB
)
(a) Comparison between the adjoint sensitivities | ∂S11∂M12
| (—) and | ∂S11∂d12| (- - -).
−2 −1 0 1 2
−40
−20
0
ω
dS
21/d
g12
and
dS
11/d
M12
(dB
)
(b) Comparison between the adjoint sensitivities | ∂S21∂M12
| (—) and | ∂S21∂d12| (- - -).
Figure 6.3 Comparison between the adjoint sensitivities of the S-parameters withrespect to the geometrical (- - -) and circuit or coupling parameters (—).
that ∞-norm is the smallest after iteration 2 (at simulation 3), meaning that
the maximum difference with respect to the target value is the lowest at that
iteration. However the 2-norm of the vector ∆m is clearly minimal after the
4th iteration. Figure 6.6b shows the evolution of the 2-norm and the ∞-norm of
the correction vector ∆g during the tuning process. The maximum correction
proposed for the second iteration is larger than for the first, for the following
6.7 TUNING OF A CT FILTER 143

−6 −4 −2 0 2
−5
0
5
Real part of adjoint sensitivity
Imag
inar
yp
art
ofad
join
tse
nsi
tivit
y
Figure 6.4 Comparison between the adjoint sensitivities ∂S11∂M12
(—), −j ∂S11∂M12
(—) and∂S11∂d12
(- - -).
iteration it clearly decreases. Note that these corrections are in mm. Finally
remark that the TZs do not perfectly coincide. This is due to the presence
of the unwanted parasitic couplings M16,M26 and M36 (shown in Table 6.2).
We have not re-distributed the parasitic couplings, so note that they are not
necessarily physically located at those positions. Figure 6.7 shows the response
that is obtained from the ideal coupling matrix when the parasitic couplings
are added. It is clear that then the TZs now coincide. Note however that the
parasitic couplings are small, we therefore choose not to re-optimize the target
matrix.
144 CHAPTER 6 ELECTROMAGNETIC OPTIMIZATION OF MICROSTRIP BANDPASS FILTERS BASED ON ADJOINT
SENSITIVITY ANALYSIS

Parameter Initial Final TargetMS1 1.0605 1.0485 1.0422ML8 1.0490 1.0407 1.0422M12 0.9199 0.8342 0.8355M23 0.4751 0.5800 0.5789M13 0.2146 0.2768 0.2745M34 -0.1227 -0.5993 -0.5986M45 0.4434 0.3552 0.3544M56 0.4594 0.5944 0.5942M46 0.7212 0.6449 0.6483M11 -0.0758 0.0385 0.0394M22 -0.7571 -0.3351 -0.3377M33 -0.1227 0.1066 0.1138M44 -0.0357 0.1411 0.1349M55 -0.8558 -0.8155 -0.8252M66 -0.3068 0.0349 0.0394MSL 0 -0.0001 0MS6 0 -0.0001 0ML1 0 -0.0001 0M16 -0.0010 -0.0007 0M26 0.0155 0.0133 0M36 0.0036 0.0044 0
Table 6.2 Extracted and target coupling parameters of the SOLR CT filter.
6.7 TUNING OF A CT FILTER 145

1 2 3 4 5
0.2
0.4
0.6
0.8
1
EM-simulation
Mkl
(a) Evolution of the inter-resonator couplings during the tuning process.
1 2 3 4 5−1
−0.5
0
EM-simulation
Mkk
(b) Evolution of the self-couplings during the tuning process.
Figure 6.5 Evolution of the coupling parameters during the tuning process. The fulllines mark the target values of the first triplet and the dashed lines markthe target values of the second triplet.
146 CHAPTER 6 ELECTROMAGNETIC OPTIMIZATION OF MICROSTRIP BANDPASS FILTERS BASED ON ADJOINT
SENSITIVITY ANALYSIS

1 2 3 4 5
0
0.2
0.4
0.6
0.8
EM-simulation
||∆m|| 2
and
max(∆
m)
(a) The 2-norm of the error vector ‖ ∆m ‖2 (-o) and the maximal error ‖ ∆m ‖∞(-x).
1 2 3 4 50
0.2
0.4
0.6
0.8
EM-simulation
||∆g|| 2
and
max(∆
g)
(b) The 2-norm of the correction vector ‖ ∆g ‖2 (-o) and the maximal correction‖ ∆g ‖∞ (-x) (mm).
Figure 6.6 Evolution of the 2-norm and ∞-norm of the error vector ∆m and thecorrection vector ∆g.
6.7 TUNING OF A CT FILTER 147

−3 −2 −1 0 1 2 3
−60
−40
−20
0
ω
|S21|(
dB
)
Figure 6.7 |S21| (dB) of the final (—) design and response obtained from the idealcoupling matrix (- - -) when the parasitic couplings are added versus theideal response (- - -).
148 CHAPTER 6 ELECTROMAGNETIC OPTIMIZATION OF MICROSTRIP BANDPASS FILTERS BASED ON ADJOINT
SENSITIVITY ANALYSIS

6.8 Tuning of a SQ filter
In this section the tuning method is applied to the design of a SQ filter. In
this type of filter the parasitics affects the response more than in the case of
the CT filter. Therefore we will re-optimize the target matrix during the tuning
procedure. The filter is designed to have center frequency fc = 1.2 GHz, a
fractional bandwidth FBW = 0.04, a return loss of 22 dB and 1 symmetric
TZ pair at ω = ±1.5. The filter is implemented on a RO4360 substrate with a
thickness of 1.016 mm and εr = 6.15. To implement the λ2 -resonators we use
SOLR structures. The filter has the same lay-out as the example discussed in
Section 3.6 (Figure 3.14). The target coupling matrix is given in Table 6.3. The
initial values for the filter are generated using the design curves (Section 3.6)
and are given in Table 6.4.
Parameter Initial Iteration 1 TargetMS1 1.0654 1.0702 1.0580ML4 1.0651 1.0337 1.0580M12 0.8683 0.8352 0.8365M23 0.9111 0.8766 0.8713M34 0.8522 0.8393 0.8365M14 -0.4301 -0.4058 -0.4089M11 0.1731 0.0033 0M22 0.2837 -0.0177 0M33 -0.0708 0.0232 0M44 0.1733 -0.0092 0MSL 0.0081 0.0076 0MS4 0.0118 0.0113 0ML1 0.0118 0.0113 0M24 0.1665 0.1471 0
Table 6.3 Extracted and target coupling parameters of the SOLR SQ filter.
6.8.1 TUNING TO THE ORIGINAL TARGET MATRIX
In the first part of the tuning procedure, we tune the filter such that all of
the coupling parameters are as close as possible to the target coupling matrix.
Similarly as for the CT filter, we set the value of the minimal correction δcorr to
0.01 mm. After one iteration, all of the inter-resonator couplings are very close
to the target values (maximal difference is -0.0053) and ‖ ∆gdk ‖∞= −0.0067
mm. Moreover the values of the diagonal elements are also very close to target
values (maximal difference is 0.0232). Table 6.3 shows however that the para-
sitic coupling M34 has the same order of magnitude as the other inter-resonator
6.8 TUNING OF A SQ FILTER 149

Physical parameter Initial Value (mm) Iteration 1 (mm)a 16.7 16.7w 1 1t1 5 5t2 5 5d12 1.6 1.64d23 2 2.13d34 1.6 1.65d14 1.7 1.75g1 1.5 1.68g2 1.5 1.83g3 1.5 1.44g4 1.5 1.69
Table 6.4 Initial and final values for the physical design parameters of the SQ filter.
couplings present in the filter. Figure 6.8 shows |S11| and |S21| for the ideal
response, the initial values and for the first iteration. One would say that the
adjustments of the filter deteriorated the response of the filter. Note however
that we have only tuned for the couplings present in the target coupling matrix,
without taking into account the parasitic coupling M24. If we add the observed
value of M24 to the ideal target matrix and look at the corresponding result, we
observe that the response is very close to the observed response after iteration 1.
There is however still an offset since the diagonal elements M22 and M33 are not
sufficiently close to 0. Therefore it has no use to further tune towards the initial
target coupling matrix that does not take into account the parasitic couplings.
We thus re-optimize the target coupling matrix, taking into account the value
of M24 at iteration 1.
6.8.2 RE-OPTIMIZATION OF THE TARGET COUPLING MATRIX
The target coupling matrix is re-optimized using the method discussed in Sec-
tion 6.5. This means that we only re-optimize the diagonal values of the target
coupling matrix. The values of the re-optimized target matrix are given in Ta-
ble 6.5. Figure 6.9 shows the response of iteration 2 and the re-optimized ideal
response. The filter is now much closer to the ideal response as was the case
both for the initial design and after iteration 1. Table 6.5 compares the extracted
coupling parameters for iteration 2 to the re-optimized coupling parameters. The
table shows that the implemented coupling parameters are very close to the re-
optimized target values: the maximal difference is -0.0106. Figure 6.9 shows
however that the implemented response does not match the re-optimized re-
150 CHAPTER 6 ELECTROMAGNETIC OPTIMIZATION OF MICROSTRIP BANDPASS FILTERS BASED ON ADJOINT
SENSITIVITY ANALYSIS
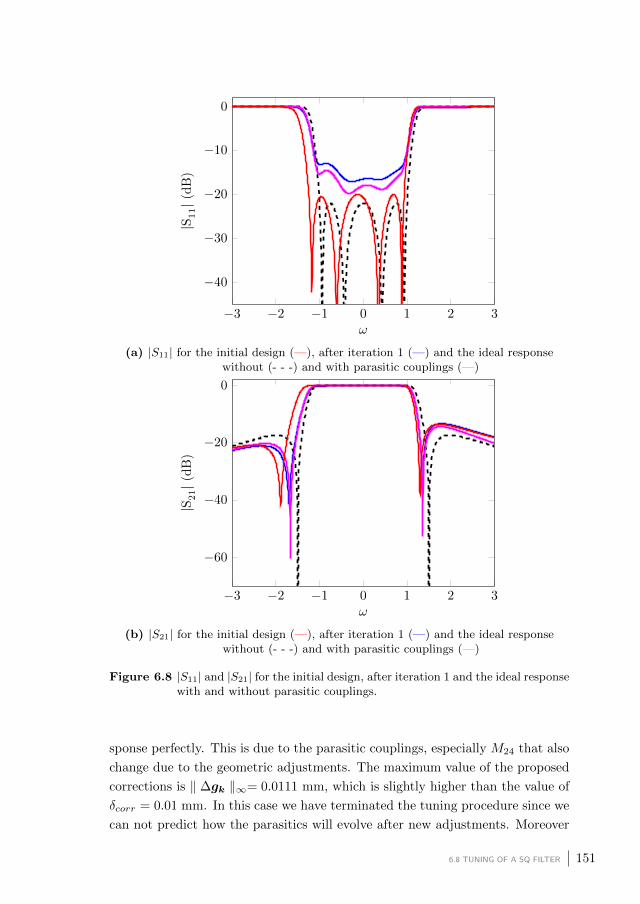
−3 −2 −1 0 1 2 3
−40
−30
−20
−10
0
ω
|S11|(
dB
)
(a) |S11| for the initial design (—), after iteration 1 (—) and the ideal responsewithout (- - -) and with parasitic couplings (—)
−3 −2 −1 0 1 2 3
−60
−40
−20
0
ω
|S21|(
dB
)
(b) |S21| for the initial design (—), after iteration 1 (—) and the ideal responsewithout (- - -) and with parasitic couplings (—)
Figure 6.8 |S11| and |S21| for the initial design, after iteration 1 and the ideal responsewith and without parasitic couplings.
sponse perfectly. This is due to the parasitic couplings, especially M24 that also
change due to the geometric adjustments. The maximum value of the proposed
corrections is ‖ ∆gk ‖∞= 0.0111 mm, which is slightly higher than the value of
δcorr = 0.01 mm. In this case we have terminated the tuning procedure since we
can not predict how the parasitics will evolve after new adjustments. Moreover
6.8 TUNING OF A SQ FILTER 151

we are very close to the target values. Finally note that S21 of the re-optimized
response attenuates less in the upper stopband when compared to the original
ideal response.
Parameter Iteration 2 Re-optimized Target TargetMS1 1.0703 1.0580 1.0580ML4 1.0725 1.0337 1.0580M12 0.8329 0.8365 0.8365M23 0.8687 0.8713 0.8713M34 0.8338 0.8365 0.8365M14 -0.4107 -0.4089 -0.4089M11 -0.0090 -0.0069 0M22 0.0501 0.0396 0M33 -0.2169 -0.2119 0M44 -0.0521 -0.0491 0MSL 0.0077 0.0076 0MS4 0.0114 0.0113 0ML1 0.0114 0.0113 0M24 0.1514 0.1471 0
Table 6.5 The extracted coupling parameters for iteration 2, the original target andthe re-optimized target matrix.
152 CHAPTER 6 ELECTROMAGNETIC OPTIMIZATION OF MICROSTRIP BANDPASS FILTERS BASED ON ADJOINT
SENSITIVITY ANALYSIS

−3 −2 −1 0 1 2 3
−40
−30
−20
−10
0
ω
|S11|(
dB
)
(a) |S11| for iteration 2 (—), the ideal response (- - -) and the target re-optimized forthe parasitic couplings (—).
−3 −2 −1 0 1 2 3
−60
−40
−20
0
ω
|S21|(
dB
)
(b) |S21| for iteration 2 (—), the ideal response (- - -) and the target re-optimized forthe parasitic couplings (—).
Figure 6.9 |S11| and |S21| iteration 2, the ideal response and the target re-optimizedfor the parasitic couplings.
6.9 Discussion
The major benefit of using a coupling matrix based cost function is that in the
vicinity of the solution the Jacobian matrix of the function relating the design
parameters to the coupling parameters is almost diagonal. This makes that
a certain coupling parameter mainly depends of one design parameter and is
6.9 DISCUSSION 153

practically independent of the other design parameters. Moreover it is known
that coupling parameter behaves more or less quadratic as a function of the
design parameters [Amar 06]. Therefore the tuning algorithm requires only a few
iterations. Moreover there are no local minima in the region where the extracted
coupling matrix models the filter behavior well. This is a major advantage
with respect to other tuning methods based on pole-zero matching [Koza 02],
which optimize a cost function based on the position of the poles and the zeros.
The relation between the poles and zeros and the design parameters is more
complex than the relation between physically implemented couplings and the
design parameters. Thus there is no guarantee that there are no local minima
in the vicinity of the solution.
6.10 Remarks
The first remark is related to the implementation of the tuning procedure in
Matlab. Due to a bug in CST [CST 15], it was necessary to divide the adjoint
sensitivity of the S-parameters with respect to the geometrical parameters (pro-
vided by CST) by 2. CST has guaranteed that in the future version this error
will be resolved. We must remark that in the case the Fast reduced order model
simulation setting is used, the adjoint sensitivities are correct.
The second remark has to do with the simulation time. At the moment it is
rather high. This is mainly due to the adaptive meshing which takes almost half
of the simulation time. We plan to investigate how we can decrease the required
simulation time without loosing accuracy.
As a final remark, we point out that at the moment the method can not be used
to tune the input-to-first-resonator and output-to-N th-resonator coupling. The
reason for that is that it is not possible to obtain the adjoint sensitivity with
respect to parameters that touch the ports.
6.11 Conclusion
This chapter presents a novel CAT method based on the estimation of the Ja-
cobian matrix relating the physical design parameters to the physically imple-
mented coupling matrix. The main novelty of the method is the estimation of
the Jacobian matrix of the coupling parameters with respect to the physical
design parameters using adjoint sensitivities. To estimate the Jacobian one
EM-simulation suffices. This is a vast improvement over the finite difference
evaluation where an extra EM-simulation is needed for each physical design
154 CHAPTER 6 ELECTROMAGNETIC OPTIMIZATION OF MICROSTRIP BANDPASS FILTERS BASED ON ADJOINT
SENSITIVITY ANALYSIS

parameter. Note that an EM-simulation with adjoint sensitivities requires more
time than a simulation without. Nevertheless this does not drastically increase
the simulation time. Another benefit of the Jacobian estimation method is that
it offers a criterion to determine the physically implemented coupling matrix in
the case of non-canonical topologies. The novel CAT method is used to tune a
6th order CT and 4th order SQ filter. Both examples shows that knowledge of the
Jacobian matrix drastically decreases the number of EM-simulations required to
tune the filter. For the CT filter 4 iterations (5 EM-simulation) suffice, where the
filter has 13 design parameters. Note that an estimation of the Jacobian using
finite differences would already take 13 extra EM-simulations. In the example of
SQ filter, the target coupling matrix had to be re-optimized due to the presence
of strong parasitic couplings. Nevertheless the tuning only required 2 itera-
tions (3 EM-simulations). Note that the proposed strategy to handle parasitic
couplings must be further improved in the future, since it does not take into
account the fact that parasitic couplings also change due to adjustments of the
physical parameters. We may conclude that this method is an ideal candidate
for EM-based fine-tuning of coupled resonator bandpass filters.
6.11 CONCLUSION 155


PART II
Metamodel Approach
157


7Efficient and Automated Generation of Multidimensional Design Curves
using Metamodels
This chapter introduces a method to automatically generate multidimensional
design curves for the initial dimensioning of coupled-resonator filters. As we have
seen in Chapter 3, these curves are look-up tables that relate the inter-resonator
couplings and the input and output couplings (or external quality factors) to the
physical design parameters of the filters. To minimize the number of EM simula-
tions required for the generation of the curves, these curves often consider only a
single design parameter. In reality, several design parameters simultaneously in-
fluence the inter-resonator coupling and external quality factors. In this chapter,
a metamodeling method is used to generate multidimensional design curves with
a reasonable number of EM simulations, while maintaining a good accuracy. The
generation process only requires one to provide ranges of the design parameters
over which the curves are generated. This information is readily available based
on geometric and process related arguments. The remainder of the generation
process requires no further user interaction. To show the applicability of the
method, we generate design curves for the design of a coupled hairpin resonator
filter. We use the extracted curves to generate initial values for a 5th order filter
for 3 different design scenarios.
7.1 Introduction
In Chapter 3 a method to generate initial values for coupled-resonator bandpass
filters was introduced. The method first divides the filter into building blocks.
Next, it dimensions these blocks separately and finally merges them together.
The dimensioning of each individual block relies on design curves to relate the
physical parameters to the coupling parameters [Pugl 00; Pugl 01]. The classical
generation procedure of design curves (discussed in Section 3.5), first computes
the frequency response function (FRF) of a building block (section of coupled
159

resonators or single input/output resonator) at a discrete set of frequency sam-
ples for some ”well-chosen” values of a design parameter. For each value of the
design parameter, the corresponding coupling parameter and external quality
factor are extracted from the FRFs (the frequency-domain scattering parame-
ters). This process yields sampled design curves (or look-up tables) on some kind
of regular grid in the geometric parameters. As the FRFs are usually obtained
using electromagnetic (EM) field solvers [Swan 07b], the design curve generation
procedure often becomes very time-consuming.
To our knowledge, no real guidelines/techniques exist to determine the set of
frequencies and the values of the design parameters the EM simulations that
have to be selected to obtain design curves with a minimal number of the EM
simulations and frequencies while the desired accuracy is preserved. Preferably,
multiple design parameters should be considered in the design curves generation
process. As a consequence, the number of EM simulations and therefore the
design curves generation time grow very rapidly if some kind of regular grid is
chosen for the geometrical parameters, even though many grid points bring only
a limited amount of information.
Here, we propose an efficient and automated metamodel-based design curves
generation procedure. It overcomes the limitations of the classical design curve
generation procedure. A metamodel [Klei 08] is a very efficient representation
of a multi-dimensional function that provides a functional relationship between
input and output variables. In our case, these correspond to physical design pa-
rameters and the coupling parameters and external quality factors, respectively.
Metamodels can have different basis functions: e.g. polynomial functions, radial
basis functions, or splines [Klei 08]. Adaptive sampling methods [Wang 07] limit
the amount of computationally expensive numerical simulations needed for the
generation of metamodels while maintaining the coverage of the input space.
This chapter presents a metamodeling approach that automates and drastically
speeds-up the generation of multidimensional design curves for microwave filters.
The coupling parameter and the external quality factors of coupled-resonator
filters are modeled as a function of multiple geometrical design parameter. To
obtain it, a system identification approach is combined with an adaptive fre-
quency sampling. This allows to efficiently and accurately extract the values
of the coupling parameter and external quality factors over the complete de-
sign space using a set of design parameter values automatically chosen by the
metamodeling adaptive sampling and starting from frequency-domain scattering
parameters. The values of the coupling parameters extracted from the simulated
160 CHAPTER 7 EFFICIENT AND AUTOMATED GENERATION OF MULTIDIMENSIONAL DESIGN CURVES USING
METAMODELS

data are used for the generation of the metamodels. The user interaction is
limited to providing the frequency range of interest, the design parameters of
interest and their corresponding ranges. If the design parameters ranges are
chosen wide enough to allow the modeling of all physically significant variations
of the coupling parameter and external quality factor, then the design curves can
be used for multiple design cases. Multidimensional design curves that depend
on multiple design parameters can be generated in a reduced amount of time.
This offers a significant flexibility to the designer while generating initial values
for the filter design. The proposed metamodeling method is validated by the
generation of the design curves of a coupled hairpin resonator filter. These
curves are then used for multiple initial designs.
7.2 Generation of the Design Curves using Metamodels
This section describes the generation of metamodels linking the coupling param-
eters and the external quality factors to the geometrical parameters of the filter.
In Section 3.5.1 we have seen how to extract the inter-resonator coupling from
the magnitude of |S21|. Equation (3.10) relates the peak frequencies fp1 and fp2
to the inter-resonator coupling kX (in the bandpass domain):
kX = ±f2p2 − f2
p1
f2p2 + f2
p1
(7.1)
Similarly we have derived an equation in Section 3.5.2 to determine the in-
put/output coupling M′
S1 (3.20) or external quality factor Qe (3.23) from the
group delay of S11 when looking at the resonant frequency τS11(f0). In this
chapter we illustrate the method for the design of a coupled hairpin resonator
filter.
In the literature it is common to use the external quality factor rather than
the input/output coupling for such a filter. Therefore we will model Qe rather
than M′
S1. Figure 7.1 shows the building blocks of the considered hairpin res-
onator filter. We model the inter-resonator coupling kX , the peak frequen-
cies fp1 and fp2, the external quality factor Qe and the resonant frequency f0.
The values of (kX , fp1, fp2, Qe, f0) change if the geometrical design parameters,
t1, l1, l2, w1, w2, h1, h2 and d12 as introduced in Figure 7.1 vary.
A metamodel F (x) is a model that describes the relationship between the inputs
x (in our case the geometrical parameters of the filter) and outputs (response)
y (in our case (kX , fp1, fp2, Qe, f0)). Therefore, we derive a model y = F (x).
7.2 GENERATION OF THE DESIGN CURVES USING METAMODELS 161

A number of input-output data samples [xk,yk] , k = 1, ...,K is needed to es-
timate and validate a metamodel. Two data grids can be used for this purpose
in the modeling process, namely an estimation grid to build the metamodel and
a validation grid to validate the it. The samples distribution in the estima-
tion and validation grid are automated using adaptive sampling approaches for
metamodels [Wang 07].
We generate two metamodels to describe the relationship between (kX , fp1, fp2)
and (Qe, f0) (response variables) and the corresponding geometrical parame-
ters (input variables). The response variables (kX , fp1, fp2, Qe, f0) taken at
a generic design space sample xk are extracted starting from the correspond-
ing frequency-domain scattering parameters. The appropriate selection of the
frequency-domain sampling grid is very important to obtain an accurate response
in a small amount of time. When the frequency resolution is chosen too coarse to
save computational resources (EM simulations are computationally expensive),
the evaluation of the response variables is inaccurate. When a too dense fre-
quency sampling is used the computational cost will increase without any gain
in accuracy.
We propose to use a system identification approach to model the FRF data
(a) Input/output hairpin resonator.
(b) Coupled hairpin resonator structure.
Figure 7.1 Building blocks of a typical coupled hairpin resonator filter.
162 CHAPTER 7 EFFICIENT AND AUTOMATED GENERATION OF MULTIDIMENSIONAL DESIGN CURVES USING
METAMODELS
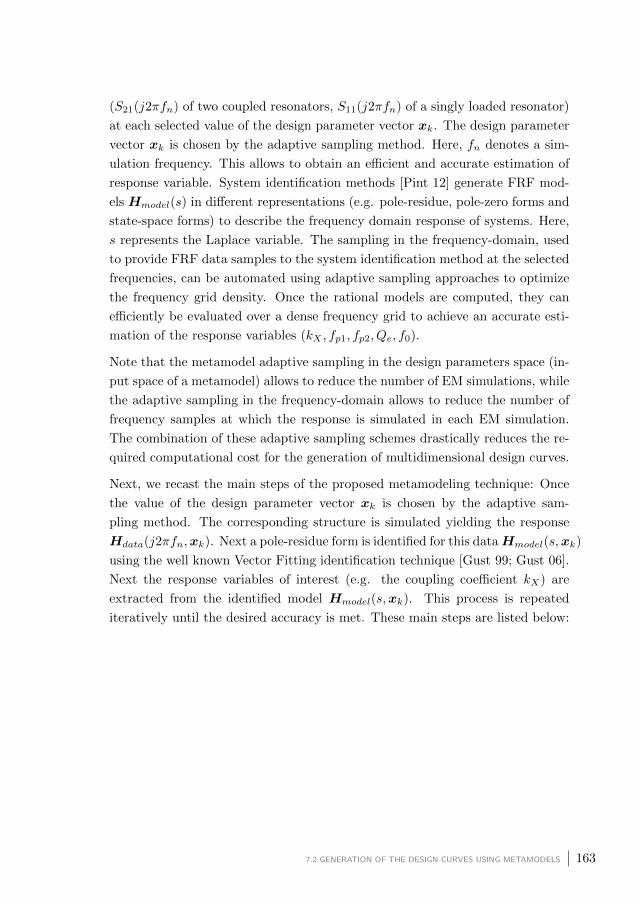
(S21(j2πfn) of two coupled resonators, S11(j2πfn) of a singly loaded resonator)
at each selected value of the design parameter vector xk. The design parameter
vector xk is chosen by the adaptive sampling method. Here, fn denotes a sim-
ulation frequency. This allows to obtain an efficient and accurate estimation of
response variable. System identification methods [Pint 12] generate FRF mod-
els Hmodel(s) in different representations (e.g. pole-residue, pole-zero forms and
state-space forms) to describe the frequency domain response of systems. Here,
s represents the Laplace variable. The sampling in the frequency-domain, used
to provide FRF data samples to the system identification method at the selected
frequencies, can be automated using adaptive sampling approaches to optimize
the frequency grid density. Once the rational models are computed, they can
efficiently be evaluated over a dense frequency grid to achieve an accurate esti-
mation of the response variables (kX , fp1, fp2, Qe, f0).
Note that the metamodel adaptive sampling in the design parameters space (in-
put space of a metamodel) allows to reduce the number of EM simulations, while
the adaptive sampling in the frequency-domain allows to reduce the number of
frequency samples at which the response is simulated in each EM simulation.
The combination of these adaptive sampling schemes drastically reduces the re-
quired computational cost for the generation of multidimensional design curves.
Next, we recast the main steps of the proposed metamodeling technique: Once
the value of the design parameter vector xk is chosen by the adaptive sam-
pling method. The corresponding structure is simulated yielding the response
Hdata(j2πfn,xk). Next a pole-residue form is identified for this dataHmodel(s,xk)
using the well known Vector Fitting identification technique [Gust 99; Gust 06].
Next the response variables of interest (e.g. the coupling coefficient kX) are
extracted from the identified model Hmodel(s,xk). This process is repeated
iteratively until the desired accuracy is met. These main steps are listed below:
7.2 GENERATION OF THE DESIGN CURVES USING METAMODELS 163

Hdata(j2πfn,xk)system identification−−−−−−−−−−−−−−→Hmodel(s,xk)
Hmodel(s,xk) =
P (xk)∑
p=1
Cp(xk)
s− ap(xk)+D(xk)
Hmodel(s,xk)extraction−−−−−−−→ yk = y(xk)
(xk,yk)metamodel−−−−−−−→ F (x)
fn(chosen by adaptive frequency sampling)
xk(chosen by metamodel adaptive sampling)
Note that Hdata denotes the FRF data S21 of two coupled resonators and S11
of a singled loaded resonator. The matrix Cp is 2× 2 matrix that contains the
residues of the pole ap and the matrix D is 2×2 matrix that contains the direct
terms.
7.3 Example: Hairpin Resonator Filter
This section validates the proposed metamodeling technique for the generation
of multidimensional design curves of a 5-th order coupled hairpin resonator filter
(Figure 7.2). The extracted design curves are then used for the design of multiple
5th order Chebyshev filters with the center frequency fc in the range [1.8 −2.2] GHz and a fractional bandwidth FBW = f2−f1
fc(where f1 and f2 are the
equiripple cutoff frequencies) in the range [0.08− 0.12].
Figure 7.2 Top-view of the layout of a 5th order hairpin resonator filter.
The single resonator structure (Figure 7.1a) is used in order to model Qe and
f0 as a function of the position of the feed line t, the length of the legs of the
164 CHAPTER 7 EFFICIENT AND AUTOMATED GENERATION OF MULTIDIMENSIONAL DESIGN CURVES USING
METAMODELS
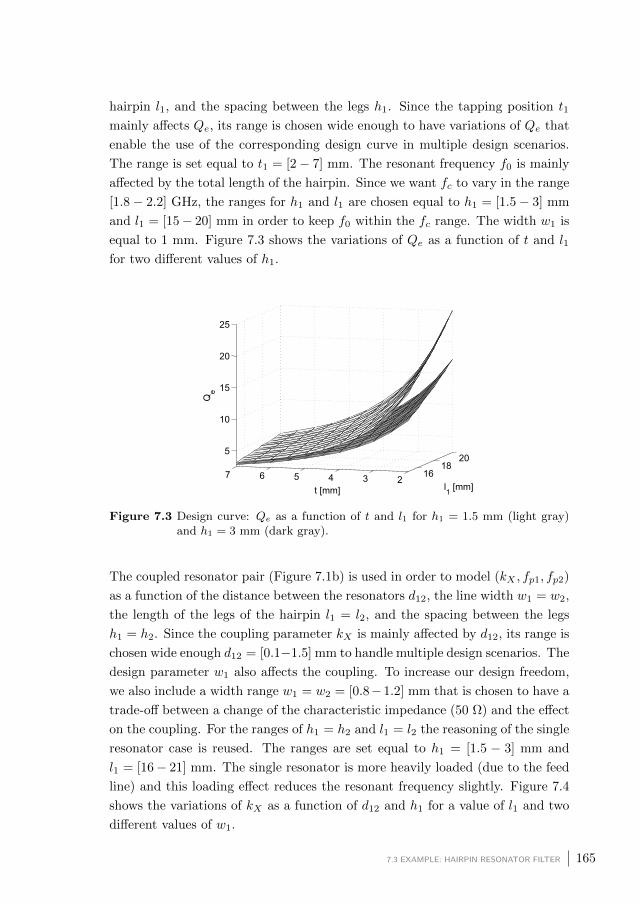
hairpin l1, and the spacing between the legs h1. Since the tapping position t1
mainly affects Qe, its range is chosen wide enough to have variations of Qe that
enable the use of the corresponding design curve in multiple design scenarios.
The range is set equal to t1 = [2− 7] mm. The resonant frequency f0 is mainly
affected by the total length of the hairpin. Since we want fc to vary in the range
[1.8− 2.2] GHz, the ranges for h1 and l1 are chosen equal to h1 = [1.5− 3] mm
and l1 = [15− 20] mm in order to keep f0 within the fc range. The width w1 is
equal to 1 mm. Figure 7.3 shows the variations of Qe as a function of t and l1
for two different values of h1.
Figure 7.3 Design curve: Qe as a function of t and l1 for h1 = 1.5 mm (light gray)and h1 = 3 mm (dark gray).
The coupled resonator pair (Figure 7.1b) is used in order to model (kX , fp1, fp2)
as a function of the distance between the resonators d12, the line width w1 = w2,
the length of the legs of the hairpin l1 = l2, and the spacing between the legs
h1 = h2. Since the coupling parameter kX is mainly affected by d12, its range is
chosen wide enough d12 = [0.1−1.5] mm to handle multiple design scenarios. The
design parameter w1 also affects the coupling. To increase our design freedom,
we also include a width range w1 = w2 = [0.8−1.2] mm that is chosen to have a
trade-off between a change of the characteristic impedance (50 Ω) and the effect
on the coupling. For the ranges of h1 = h2 and l1 = l2 the reasoning of the single
resonator case is reused. The ranges are set equal to h1 = [1.5 − 3] mm and
l1 = [16− 21] mm. The single resonator is more heavily loaded (due to the feed
line) and this loading effect reduces the resonant frequency slightly. Figure 7.4
shows the variations of kX as a function of d12 and h1 for a value of l1 and two
different values of w1.
7.3 EXAMPLE: HAIRPIN RESONATOR FILTER 165

Figure 7.4 Design curve: kX as a function of h1 and d12 for l1 = 19.75 mm andw1 = 0.8 mm (light gray) and w1 = 1.2 mm (dark gray).
All numerical experiments use Matlab R2014A and ADS Momentum EM solver
[ADS 14] and run on a Windows platform equipped with Intel Core i7 − 4770
3.40GHz CPU and 8 GB RAM.
The metamodels for this example describe the output variables (M,fp1, fp2)
and (Qe, f0) as a function of the corresponding input variables (geometrical
design parameters) defined above. The metamodels are generated using the
sparse grid interpolation schemes with adaptive sampling proposed in [Klim 05;
Klim 07]. The quality of the metamodels is judged based on an error measure.
It is defined as the absolute error of the modeled quantity (e.g. M) divided
by the difference between the maximum and minimum value of this quantity
over the range for which the quantity is modeled. A maximum error equal
to 0.01 is desired. We have used the built-in adaptive frequency sampling of
the ADS Momentum [ADS 14] to efficiently sample the scattering parameters
response of the coupled resonator and single loaded resonator structures in the
frequency-domain. The Vector Fitting system identification method [Gust 99]
has been used to build pole-residue rational models of S21(j2πf) and S11(j2πf)
of these two structures. These rational models have been evaluated over a dense
frequency grid of 1001 samples to extract the response variables data samples of
(M,fp1, fp2) and (Qe, f0). This is repeated at each value of the design parameters
chosen by the adaptive sampling process [Klim 05; Klim 07] in the design space.
The adaptive sampling method [Klim 05; Klim 07] has required 157 samples
to generate the metamodels of (M,fp1, fp2) and 121 samples for the model of
(Qe, f0) with a maximum error equal to 0.01. The average CPU time needed to
166 CHAPTER 7 EFFICIENT AND AUTOMATED GENERATION OF MULTIDIMENSIONAL DESIGN CURVES USING
METAMODELS

extract the data samples of (M,fp1, fp2) and (Qe, f0) in a design space point from
EM simulations (with adaptive frequency sampling and Vector Fitting models)
is equal to 7.4 s and 3.8 s respectively. The overall CPU time needed to build
the metamodels of (M,fp1, fp2) and (Qe, f0) is equal to 20 m 4 s and 6 m 47 s,
respectively.
The average CPU time needed to evaluate the built metamodels of (M,fp1, fp2)
and (Qe, f0) in a design space point is equal to 0.64 ms and 0.28 ms. When we
compare this to the classical design curves generation method to generate 4-D
design curves on regular grid for (M,fp1, fp2) taking 5 samples for each design
parameter in the design space (d12, w1 = w2, l1 = l2, h1 = h2), this would already
require 54 = 625 samples (therefore 625 EM simulations). This is more than two
times the amount of samples needed to generate the metamodels of (M,fp1, fp2)
and (Qe, f0) with the proposed approach. Moreover, in the classical approach
the user has no idea whether the frequency axis and the design space are over-
or under-sampled and has no clue about the level of accuracy achieved.
The 4-D and 3-D metamodel-based design curves of (M,fp1, fp2) and (Qe, f0)
are finally used to obtain design parameters values for three different design
scenarios with the following specifications:
1. Design 1 : fc = 1.9 GHz, FBW = 0.12, passband ripple = 0.1 dB (RL =
16.43 dB)
2. Design 2 : fc = 2 GHz, FBW = 0.8, passband ripple = 0.1 dB (RL =
16.43 dB)
3. Design 3 : fc = 2.1 GHz, FBW = 0.1, passband ripple = 0.1 dB (RL =
16.43 dB)
Figure 7.5 shows the scattering parameters of the 5-th order filter after an ini-
tial dimensioning based on the metamodel-based design curves for each design
scenario. In the three design scenarios, the difference between the desired and
actual FBW is less than 0.005 and there is a small shift of the center frequency
fc. When we compare these results to other initial designs found in the liter-
ature [Hong 01], we observe a similar quality of the initial designs. In order
to have an idea of the difference between the implemented and ideal coupling
parameters in the bandpass domain we extract the coupling matrices using the
method discussed in Chapter 4. Table 7.1 compares the extracted and ideal
couplings for the 3 designs. For Design 1 we observe an maximum relative error
of 0.0428. The relative error on Qe is 0.0033. The frequency shift with respect
7.3 EXAMPLE: HAIRPIN RESONATOR FILTER 167

to fc explains the presence of non-zero self-couplings, which are relatively small.
For Design 2 we observe a similar relative error for the inter-resonator couplings
of 0.0169. The error on the external quality factor is 0.0362. There is also a
frequency shift, but this shift is smaller. Note that the inter-resonator couplings
are smaller for this example, because of the narrower bandwidth. This results in
larger distances between the resonators. Therefore the loading on the resonators
is smaller and thus the frequency shift is expected to be smaller. This is what we
observe. For Design 3 we find a relative error of 0.0313 for the inter-resonator
couplings and relative error 0.12 for the external quality factor. Nevertheless
this error is still acceptably small for an initial design value.
The fact that the curves are multi-dimensional allows the designer to use them
for several designs. An important parameter that is different for the three cases
is the length of the legs l1 and the distance between the legs h1 of the hairpin
resonator . These parameters also have an important effect on the coupling
and thus on the inter-resonator spacings. In the classical approach the inter-
resonator coupling curves would have to be re-extracted for every new value of
l1 and h1.
Design 1 Design 2 Design 3Parameter Extracted Ideal Extracted Ideal Extracted IdealQe1 9.5251 9.5568 14.3352 13.8349 11.4681 13.0950Qe2 9.5251 9.5568 14.3352 13.8347 11.4681 13.0947M ′12 0.0998 0.0957 0.0638 0.0649 0.0797 0.0823M ′23 0.0737 0.0729 0.0486 0.0492 0.0608 0.0627M ′34 0.0732 0.0729 0.0486 0.0492 0.0608 0.0627M ′45 0.0997 0.0957 0.0638 0.0649 0.0797 0.0823M ′11 0.0285 0 0 0.0197 0 0.0299M ′22 0.0269 0 0 0.0049 0 0.0130M ′33 0.0222 0 0 0.0113 0 0.0050M ′44 0.0335 0 0 0.0034 0 0.0152M ′55 0.0285 0 0 0.0197 0 0.0299
Table 7.1 Extracted and ideal coupling parameters in the bandpass domain for thethree designs.
168 CHAPTER 7 EFFICIENT AND AUTOMATED GENERATION OF MULTIDIMENSIONAL DESIGN CURVES USING
METAMODELS

(a) |S11| for the different initial designs.
(b) |S21| for the different initial designs.
Figure 7.5 |S11| and |S21| for the initial values of the different design scenarios.
7.3 EXAMPLE: HAIRPIN RESONATOR FILTER 169

7.4 Conclusion
This chapter introduces a metamodeling approach for an efficient and automated
generation of multidimensional design curves for coupled-resonator bandpass
filters. Adaptive sampling approaches are used to minimize the number of EM-
simulations and the number of frequency samples per EM-simulation needed to
generate the metamodels that represent the design curves. The only required
user interaction is the choice of the ranges of the frequency and of the design
parameters. Large variations of multiple design parameters can be taken into
account, which allows one to use the design curves in multiple design scenarios.
These large variations come at a cost of a higher time to generate the curves. Also
when the number of design parameters grows, the time needed to generate the
curves increases very fast as well. This is known as the curse of dimensionality.
In this application however the number of design parameters is typically low,
since the filter is divided into its individual building blocks and each block is
modeled separately.
The numerical results have confirmed the efficiency, accuracy and flexibility of
the proposed methodology. Multidimensional design curves based on efficient
metamodels whose generation is fully automated are a powerful design tool that
allows designers to efficiently explore multiple design scenarios and significantly
save computational resources during the design flow.
170 CHAPTER 7 EFFICIENT AND AUTOMATED GENERATION OF MULTIDIMENSIONAL DESIGN CURVES USING
METAMODELS

8A Scalable Macromodeling Methodology for the Efficient Design of Mi-
crowave Filters
This chapter introduces a novel computer-aided design (CAD) methodology for
microwave filters. The methodology uses scalable macromodels to model the
behavior of the S-parameters as a function of the physical design parameters
of the filter. The physical parameters are varied over a well chosen range of
values. The benefit of a scalable macromodel is that they are numerically cheap
to evaluate. Once the model is generated, it can thus be used to optimize the
filter design parameters to meet the specifications. If the ranges of the design
parameters are chosen sufficiently broad, the model can be reused in multiple
design scenarios. So far the inclusion of scalable macromodels in the design cycle
of microwave filters has not been studied and discussed in the literature.
In this chapter, we show that scalable macromodels can be included in the design
cycle of microwave filters and can be reused in multiple designs at a low com-
putational cost. We give guidelines to properly generate and use these scalable
macromodels in a filter design context. We illustrate the approach on a state-
of-the-art design example: a microstrip dual-band bandpass filter with closely
spaced passbands and a complex geometrical structure. The results confirm that
scalable macromodels can indeed be used as proper design tools and represent
an efficient and accurate alternative to the mainstream, but computationally
expensive EM simulator-based design flow. The work discussed in this chapter
has been published in [Caen 16].
8.1 Introduction
Over the last years several methods have been developed to improve the design
of microwave filters [Levy 02; Swan 07a]. Design techniques based on design
curves are shown to yield relatively good initial designs. However most de-
171

sign curve based filters, require post-processing and fine-tuning to meet the
desired frequency template specifications. The fine-tuning process involves nu-
merical optimization and is based on multiple accurate electromagnetic (EM)
simulations. Accuracy comes at a price however, these solvers are known to
be computationally expensive and hence time consuming. Even though most
optimization methods [Band 94b; Arnd 04; Koza 02; Lamp 04; Koza 06] yield
accurate designs, their design time grows linearly with the number of filters to
be designed. Even though the layout if similar. This is a consequence of the
optimization towards a single set of specifications. If the specifications change,
the complete process must be redone.
To speed up the design process, we propose to replace the EM solver by a com-
putationally efficient scalable frequency response macromodel. In this chapter,
scalable (or parametric) macromodels are used as a compromise between model
accuracy and complexity. Generating scalable macromodels to represent the
parameterized response of microwave systems as a function of frequency and
additional design parameters such as geometrical variables and material proper-
ties, is an active field of research [Peik 98; Lame 03; Cuyt 06; Deva 03; Lame 09;
Basl 10; Lehm 01; Triv 09; Ferr 09; Ferr 10; Triv 10; Ferr 11; Ferr 12]. The two
main advantages of using scalable macromodels in the design process are:
1. The scalable macromodels replace the expensive EM solver to evaluate the
filter response as a function of the frequency and the design parameters
of interest (e.g. geometrical parameters) over certain predefined ranges.
Therefore, these scalable macromodels can be used in different optimiza-
tion scenarios where changes in the specifications of the filter (e.g. the
bandwidth of interest, the selectivity, etc.) need to be examined.
2. The scalable macromodels can also be used to speed up other computa-
tionally expensive design activities, such as design exploration and design
variability analysis. Design space exploration leads to an understanding
of the filter behavior with respect to design parameters. Design variabil-
ity analysis evaluates the system reliability. Since macromodels are quite
cheap to evaluate and also accurate enough to properly capture the effects
of the design parameter variations on the filter frequency response, they
increase the time-efficiency of these design tasks.
Even though the extraction of scalable macromodels can easily be automated
using sequential sampling approaches [Chem 14b], it still requires the designer
to specify additional information. For example, the designer must select ranges
172 CHAPTER 8 A SCALABLE MACROMODELING METHODOLOGY FOR THE EFFICIENT DESIGN OF MICROWAVE
FILTERS

for the design parameters, for which the model is then built to be accurate over
these ranges. For a first design the model must thus be extracted during the
design process itself. Note that once it is extracted it can be used to optimize
filters having the same physical structure for different design specifications.
In this chapter, we show how to include scalable macromodels in the design cycle
of microwave filters. We give guidelines to properly generate and use scalable
macromodels in a filter design context. The focus is put on the practical use of
scalable macromodels for design purposes. We show that scalable macromodels
can be reused to optimize the design of different filters to meet multiple sets
of specifications. This distinguishes the proposed method from existing model-
based optimization methods and breaks the linear growth of the extraction time
with respect to the number of designs. This is a major difference with respect to
the approach used in [Kozi 06; Kozi 10b; Kozi 10a; Couc 10; Couc 12] that aims
at optimizing a particular performance measure for a particular design. This
leads to restart the modeling step for optimization each time the specifications
are changed. To summarize, this chapter explains how scalable macromodels
can effectively and practically be used by designers to speed-up the design flow,
while still achieving accurate results.
We have chosen a state-of-the-art design example: a microstrip dual-band band-
pass filter described as it is described in [Hsu 13] is used to illustrate our ap-
proach. In [Hsu 13], a design method is presented to adjust the center frequency,
the bandwidth, the position of the transmission zeros and the desired ratio of
the resonant frequency of the two passbands. This filter consists of two coupled
unequal length shunted-line stepped impedance resonators. The example nicely
illustrates the proposed macromodel-based design approach, since the design
parameters are all coupled and optimization of the design is therefore necessary
on all parameters simultaneously.
Section 8.2 describes a state-of-the-art scalable macromodeling method for an
automated model generation. To speed-up the generation process, a sampling
algorithm [Chem 14b] is used to gather data samples located at spots in the
design space where the response changes rapidly.
8.2 Scalable Macromodels for Microwave Filters
This section introduces a state-of-the-art scalable macromodeling technique that
is coupled to a sequential sampling algorithm to obtain an automated model
generation framework for microwave filters.
8.2 SCALABLE MACROMODELS FOR MICROWAVE FILTERS 173

8.2.1 BUILDING A SCALABLE MACROMODEL FROM DATA SAMPLES GENERATED BY EM
SOLVERS
The first step needed for the scalable macromodeling process is to generate
data samples used to train the model. A set of multivariate data samples
(sn, gk),H(sn, gk) (n ∈ 1, . . . , nF , k ∈ 1, . . . , ng) represents a set of
parameter-dependent frequency-domain responses. This data set depends on
the Laplace variable or complex frequency s = jΩ = j2πf and also on an
additional set of ng physical design variables g = (g1, . . . , gng ). Note that f is
the physical frequency in the bandpass domain. The region in the parameter
space that contains the selected parameters g is called the design space.
For filter structures, these design variables describe the geometry of the system
that a designer varies during the design. The data samples (sn, gk),H(sn, gk)are used to generate a scalable macromodel. The model needs to be able to
efficiently and accurately describe the parameterized behavior of the system
under study.
Similarly to what was done in Chapter 7 the data samples are divided into two
datasets: an estimation set and a validation set. The estimation set is utilized
to build a scalable macromodel. The validation set is used to validate the model
accuracy in design space points that were not used for the model generation. An
efficient sampling algorithm [Chem 14b] is used to gather data samples located at
maximally informative design space positions automatically. Spots in the design
space where the response changes rapidly are sampled more densely, while the
total number of data samples is minimized as much as possible. The algorithm
is briefly described in Section 8.2.2. In [Chem 14b], the sequential sampling
algorithm is used to automatically gather the data for the generation of scalable
macromodels [Ferr 11; Ferr 12]. These modeling methods [Ferr 11; Ferr 12] are
based on the use of interpolation of transfer functions and the use of scaling
coefficients. Recently, a scalable macromodeling approach has been proposed
in [Chem 14a] to enhance the modeling capability of [Ferr 11; Ferr 12] by using
multiple frequency scaling coefficients.
In this work, we use the scalable macromodeling technique [Chem 14a] and com-
bine it with the sequential sampling method [Chem 14b]. This is an important
step to allow automating the generation of scalable macromodels and reducing
the effort and prior knowledge needed by designers to use scalable macromodels
as a design tool. The corresponding main modeling steps are recalled briefly
in what follows. The reader can refer to [Ferr 11; Ferr 12; Chem 14a] for a
more detailed explanation. The idea is to use ng dimensional hyper-rectangular
174 CHAPTER 8 A SCALABLE MACROMODELING METHODOLOGY FOR THE EFFICIENT DESIGN OF MICROWAVE
FILTERS

(ng-box) regions as a building block for the design space. The design space is
decomposed in a concatenation of several hyper-rectangular regions. These are
denoted as Ψl, l ∈ 1, . . . , L.
Each Ψl regions contain 2ng frequency-dependent rational models, called root
macromodels at the corresponding corner points. Note that the Laplace variable
s is not considered to be part of the design space. It is modeled separately as
the root macromodels are rational pole-residue models of the Laplace variable,
representing the frequency response functions (FRFs).
These root macromodels are identified given the estimation data samples (sn, gk) ,
H(sn, gk) using the well known Vector Fitting identification technique [Gust 99;
Gust 06]. The root macromodels RΨl(s, g Ψli ), i ∈ 1, . . . , 2ng contained in an
ng-box region Ψl are represented next in a pole-residue form as
RΨl(s, g Ψli ) =
PΨli∑
p=1
CΨlp,i
s− aΨlp,i
+DΨli (8.1)
where CΨlp,i represents the residue matrices, aΨl
p,i denotes the poles and DΨli is
the direct-term matrix, where CΨlp,i ,D
Ψli ∈ R(2× 2).
For each ng-box region Ψl a set of amplitude and frequency scaling coefficients
is computed. An interpolation of the FRFs and the scaling coefficients is used
to generate a scalable macromodel RΨl(s, g) [Ferr 11; Ferr 12; Chem 14a] that
preserves the passivity and the stability. To evaluate the accuracy of the model
in every ng-box region of the design space at the corresponding validation points,
we use The Mean Absolute Error (MAE) EMAE :
EMAE(g) = maxu∈1,...,P,v∈1,...,P
1
NF
(NF∑
n=1
|Ru,v(sn, g)−Hu,v(sn, g)|)
(8.2)
where Hu,v(s, g) denotes the EM-simulation response and Ru,v(s, g) the scalable
macromodel response, respectively. The MAE is thus the maximum of the L1-
norm between the scalable macromodel response and the EM-simulation, over
the different S-parameters. P is the number of system ports, which is 2 in this
filter case.
The MAE error gives a global view on the norm of the difference between the
EM data and the model frequency responses. We note that a user can decide to
8.2 SCALABLE MACROMODELS FOR MICROWAVE FILTERS 175

utilize another error measure that is more suitable to his modeling needs. If a
fixed set of estimation and validation data samples is available, each region Ψl
in the design space is modeled and the corresponding model is validated. The
complete design space is covered cell by cell. In the next section, we briefly
describe the sequential sampling method [Chem 14b; Chem 14a] that is used to
automate the generation of scalable macromodels.
8.2.2 AUTOMATED DESIGN SPACE SAMPLING USING SEQUENTIAL SAMPLING
The sequential sampling algorithm [Chem 14b] used in this work simultaneously
automates the generation of scalable macromodels [Chem 14a] and reduces the
computational effort needed to gather estimation and validation data samples.
Figure 8.1 shows the flowchart of the algorithm. The different steps are discussed
below:
1. Initialization: defines the design space. The ng dimensional vector design
parameters is labeled g = (g1, . . . , gng ). The initial design space is a hyper
rectangle bound by 2ng corner points. It forms one single ng-box region
Ψl with l = L = 1, where L is the number of hyper rectangles that divide
the complete design space.
2. Scalable macromodel extraction : A scalable macromodel RΨl(s, g) is built
for each elementary region Ψl (l ∈ 1, . . . , L) (see Section 8.2.1).
3. Model validation: The model response in the selected region Ψl is validated
with respect to the actual EM-solver response. This requires a set of
validation data points, with corresponding EM simulations that are not
used for the model estimation. This is done in two steps: first the response
of the EM solver is compared with the macromodel response evaluating
using the MAE measure (8.2) at the center of the maximal dynamic edge.
The maximal dynamic edge is the edge for which the difference between the
response in the corresponding corner points is the greatest. If the model
is accurate enough, a second level of accuracy check is performed at the
geometric center of the hyper rectangle (similarly to [Chem 14b]).
4. Refinement : If the accuracy of the model in the region Ψl is below the
threshold ∆Ψ, the region Ψl is not divided further. Otherwise, the region
is split into two subregions along the maximally sensitive edge [Chem 14b].
The accuracy threshold ∆Ψ can be decided based on the design specifica-
tions set by the user. The threshold ∆Ψ must thus be specified by the
176 CHAPTER 8 A SCALABLE MACROMODELING METHODOLOGY FOR THE EFFICIENT DESIGN OF MICROWAVE
FILTERS

user. For example, if a minimal stopband attenuation of 30 dB is required
for the optimal design, the scalable macromodel should reach an accuracy
of at least −30 dB.
After updating the total number of regions L the algorithm is repeated from Step
2 on until all regions Ψl are covered with the required accuracy level, i.e. l = L.
Figure 8.1 shows a schematic overview of the sequential sampling algorithm.
Figure 8.1 Flowchart of the sequential sampling algorithm.
8.3 Including the Scalable Macromodel in the Design Process
As we have seen in Chapter 3, design curves are often used to obtain initial
values for the physical design parameters of the filter. Due to second order effects
most initial designs require post-processing and fine-tuning to meet the desired
specification. This process involves numerical optimization and is classically
based on multiple, accurate EM-simulations. In Chapter 5 and Chapter 6, we
have introduced novel tuning methods for coupled resonator based bandpass
filters. Although the methods yield accurate designs, they still require several
EM-simulations. The alternative that is explained here starts from the following
idea: Rather than investing time in the tuning or optimization, we may invest
that time to extract a scalable macromodel. Although the model generation
process is automated, some judicious user choices are still required:
• The frequency range of interest has to be chosen.
• The physical parameters of the filter have to be chosen (the choice of g).
Typically ng parameters are chosen in order to maximally influence the
8.3 INCLUDING THE SCALABLE MACROMODEL IN THE DESIGN PROCESS 177

properties of the filter response that do not meet the specifications. For
example, when the center frequency of the filter is too high, the physical
length of the resonators is certainly included.
• The ranges of variation of the design parameters must also be set. These
ranges depend on practical and/or physical considerations. To make this
less abstract, let us consider the spacing between two microstrip lines in
a coupled line pair. When the spacing is too small, the design cannot
be realized physically due to fabrication tolerances. When the spacing
becomes too large, there is no more coupling between the lines.
• Another important choice is the desired accuracy of the macromodel. This
choice depends on the filter specifications. For example, when the required
minimal attenuation is equal to −20 dB, the scalable macromodel should
be able to describe the filter characteristics up to an accuracy of at least
−20 dB. The user may decide to increase the model accuracy to include
some safety margin (e.g. from 5 to 10 dB of margin).
As their name suggests, user choices depend on the design and must thus be
made by the user after the initial design step. Once the model is generated it
is used to optimize the initial design. On top of that, the model can also be
used to gain insights about the behavior of the filter with respect to the design
parameters or used to optimize a new filter for a different set of specifications.
The macromodel based optimization is explained in the next section.
8.4 Macromodel based Optimization
The scalable macromodel R(s, g) of a microwave filter can be used to optimize
the initial design such that it fulfills the desired specifications. The global opti-
mization function MultiStart in Matlab is used in this chapter to perform global
optimization of the filter to satisfy the desired performances. The geometrical
values obtained during the initial dimensioning of the filter are used as starting
point for the optimization. In order to avoid local minima, the MultiStart rou-
tine also generates uniformly distributed starting points in the design space from
which several local optimizer runs are performed, generating multiple solutions.
This routine then ranks the solutions in terms of their cost function values in
ascending order. It is important to highlight that a global optimization usually
requires a high number of function evaluations (and then simulations of the sys-
tem behavior). This is not computationally expensive if scalable macromodels
178 CHAPTER 8 A SCALABLE MACROMODELING METHODOLOGY FOR THE EFFICIENT DESIGN OF MICROWAVE
FILTERS

are used for it. Global optimization is interesting since it searches for design
solutions over the complete design space of interest.
First we choose a frequency grid for which the scalable macromodel R(sm, g)
is evaluated during the optimization. A frequency in this grid is denoted as
sm, where m ∈ 1, 2, . . . , nOptF and nOptF is the number of frequencies in the
grid. These frequencies are chosen in the stop and passbands of the filter. The
frequency template specifies a lower frequency response threshold RmL and a
upper frequency response threshold RmU at frequency samples sm. The scalable
macromodel allows to calculate whether the filter satisfies or violates the given
specification by calculating:
F (sm, g) = RmL −R(sm, g) or R(sm, g)−RmU . (8.3)
A negative value in (8.3) indicates that the corresponding specification is satis-
fied, while a positive value denotes that the specification is violated. Note that
the evaluation of the macromodel in (8.3) is numerically cheap. The cost function
that the optimization minimizes in this chapter is the worst-case violation over
all the S-parameters matrix entries and the sm samples
F (g) = maxi,j
maxsm
Fi,j(sm, g). (8.4)
where Fi,j represents the cost function for the (i, j) − th S-parameter matrix
entry. Note that this is the same cost function as the one used in [Band 94b].
The cost function (8.4) is then supplied to the MultiStart optimization routine,
resulting in multiple optimal design space points that satisfy the specifications.
The application to a filter case is illustrated in Section 8.5. Note that in the
literature several more suitable cost functions exist [Came 07b; Band 88] and
that the scalable macromodel can also be used to optimize other cost functions.
8.5 Example: Microstrip Dual-Band Bandpass Filter
We have chosen the dual-band bandpass microstrip filter described in [Hsu 13] to
illustrate and validate the proposed approach. The filter consists of two coupled
unequal length shunted-line stepped impedance resonators (Figure 8.2). We use
the design method presented in [Hsu 13] to obtain initial values of the design
parameters for the initial design.
The filter is fabricated on a RO4003 substrate with a relative permittivity εr
8.5 EXAMPLE: MICROSTRIP DUAL-BAND BANDPASS FILTER 179
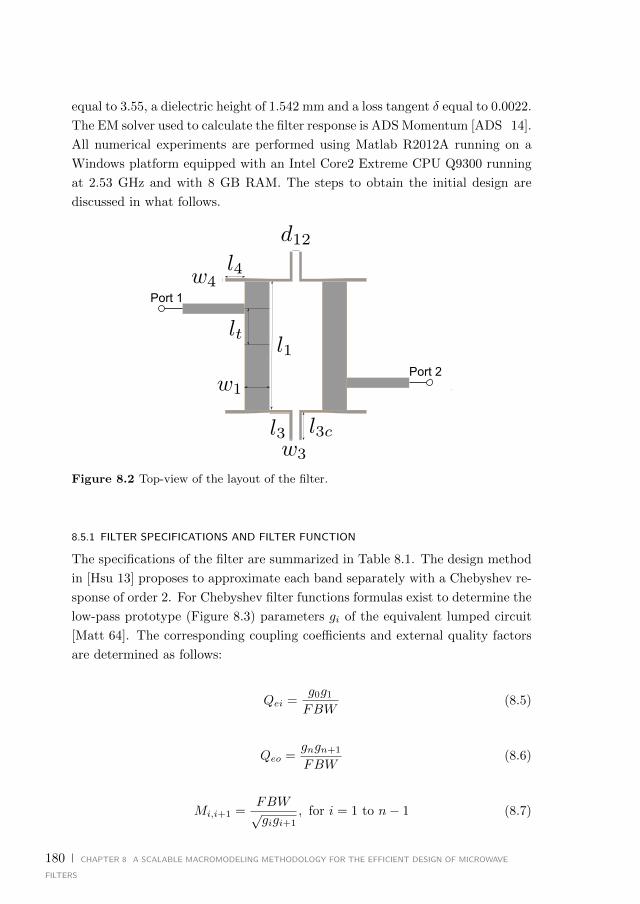
equal to 3.55, a dielectric height of 1.542 mm and a loss tangent δ equal to 0.0022.
The EM solver used to calculate the filter response is ADS Momentum [ADS 14].
All numerical experiments are performed using Matlab R2012A running on a
Windows platform equipped with an Intel Core2 Extreme CPU Q9300 running
at 2.53 GHz and with 8 GB RAM. The steps to obtain the initial design are
discussed in what follows.
Figure 8.2 Top-view of the layout of the filter.
8.5.1 FILTER SPECIFICATIONS AND FILTER FUNCTION
The specifications of the filter are summarized in Table 8.1. The design method
in [Hsu 13] proposes to approximate each band separately with a Chebyshev re-
sponse of order 2. For Chebyshev filter functions formulas exist to determine the
low-pass prototype (Figure 8.3) parameters gi of the equivalent lumped circuit
[Matt 64]. The corresponding coupling coefficients and external quality factors
are determined as follows:
Qei =g0g1
FBW(8.5)
Qeo =gngn+1
FBW(8.6)
Mi,i+1 =FBW√gigi+1
, for i = 1 to n− 1 (8.7)
180 CHAPTER 8 A SCALABLE MACROMODELING METHODOLOGY FOR THE EFFICIENT DESIGN OF MICROWAVE
FILTERS
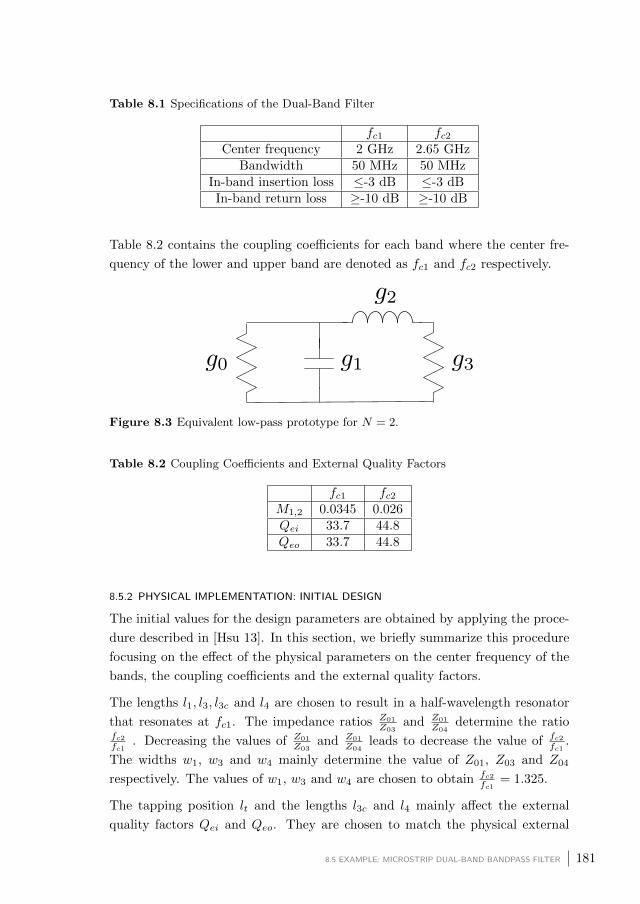
Table 8.1 Specifications of the Dual-Band Filter
fc1 fc2Center frequency 2 GHz 2.65 GHz
Bandwidth 50 MHz 50 MHzIn-band insertion loss ≤-3 dB ≤-3 dBIn-band return loss ≥-10 dB ≥-10 dB
Table 8.2 contains the coupling coefficients for each band where the center fre-
quency of the lower and upper band are denoted as fc1 and fc2 respectively.
Figure 8.3 Equivalent low-pass prototype for N = 2.
Table 8.2 Coupling Coefficients and External Quality Factors
fc1 fc2M1,2 0.0345 0.026Qei 33.7 44.8Qeo 33.7 44.8
8.5.2 PHYSICAL IMPLEMENTATION: INITIAL DESIGN
The initial values for the design parameters are obtained by applying the proce-
dure described in [Hsu 13]. In this section, we briefly summarize this procedure
focusing on the effect of the physical parameters on the center frequency of the
bands, the coupling coefficients and the external quality factors.
The lengths l1, l3, l3c and l4 are chosen to result in a half-wavelength resonator
that resonates at fc1. The impedance ratios Z01
Z03and Z01
Z04determine the ratio
fc2fc1
. Decreasing the values of Z01
Z03and Z01
Z04leads to decrease the value of fc2
fc1.
The widths w1, w3 and w4 mainly determine the value of Z01, Z03 and Z04
respectively. The values of w1, w3 and w4 are chosen to obtain fc2fc1
= 1.325.
The tapping position lt and the lengths l3c and l4 mainly affect the external
quality factors Qei and Qeo. They are chosen to match the physical external
8.5 EXAMPLE: MICROSTRIP DUAL-BAND BANDPASS FILTER 181

quality factors approximately to the ones found during the realization step. Ini-
tial values for these parameters are difficult to determine, as they affect the
response of both bands. The physical Qei and Qeo are shown in Table 8.3.
Note that these quality factors are extracted using (3.19) at ωc1 = 2πfc1 and
ωc2 = 2πfc2 separately, neglecting the influence of the bands on each other.
The spacing parameter d12 between the resonators mainly affects the coupling
coefficient M12. w3 and w4 also affect the coupling coefficient, but their effect is
smaller. The values of d12, w3 and w4 are chosen such that the physical coupling
coefficient M12 is approximately equal to the value found during the realization
step. The physical M12 for both bands is shown in Table 8.3. These parameters
are extracted using (3.11) for each band separately.
Table 8.3 Coupling Coefficients and External Quality Factors (EM simulations)
fc1 fc2M1,2 0.0373 0.0327Qei 25 33.5Qeo 25 33.5
The initial value of the design parameters given by this design method are sum-
marized in Table 8.4. Figure 8.4 shows the magnitude of S21 and S11 for the
initial design, respectively. It is clear that the specifications are not met and
therefore optimization is needed.
Table 8.4 Initial Values of the Design Parameters
l1 24.5 mml3 17 mml3c 10 mml4 1.5 mmlt 8.8 mmw1 9.5 mmw3 1 mmw4 1 mmd12 1.62 mm
8.5.3 DESIGN SPACE
In this section, we describe how to select the physical parameters that become
design parameters. Figure 8.4b shows that the ratio fc2fc1
is not equal to 1.325.
But f1 = 2 GHz is indeed properly realized. As the ratio fc2fc1
is mainly affected byZ01
Z03and Z01
Z04, w1 and w3 = w4 are chosen as design parameters. The ranges are
182 CHAPTER 8 A SCALABLE MACROMODELING METHODOLOGY FOR THE EFFICIENT DESIGN OF MICROWAVE
FILTERS

1.5 2 2.5 3
−30
−20
−10
0
Frequency (GHz)
|S11|(
dB
)
(a) |S11| for the initial design (—) and specifications (—).
1.5 2 2.5 3−60
−40
−20
0
Frequency (GHz)
|S21|(
dB
)
(b) |S21| for the initial design (—) and specifications (—).
Figure 8.4 |S11| and |S21| for the initial design and the specifications.
determined as follows: w1 must not become too large, because for large values
of w1 the characteristic impedance Z01 does not decrease anymore. Hence, it
is not relevant to model the filter behavior for those values. The value of w1
must not become too small either, because then the ratio Z01
Z03then becomes too
large and fc2fc1
becomes too large. The value of w3 must not become too small,
because then it is not physically realizable. It must also not become too large,
8.5 EXAMPLE: MICROSTRIP DUAL-BAND BANDPASS FILTER 183

because then the ratio Z01
Z03becomes too large and fc2
fc1becomes too large. Since
the coupling coefficient between the resonators is too large in the design, d12 is
also chosen as a design parameter. The upper bound of the range of d12 (= 2
mm) is chosen to ensure that there is still electromagnetic coupling between the
resonators and the lower bound (=0.5 mm) is chosen such that it is physically
realizable. Table 8.5 contains the ranges of the design parameters.
Table 8.5 Ranges of the design parameters.
Parameter Range
w1 8.5-10.5 mmw3 0.5-2 mmd12 0.5-2 mm
8.5.4 GENERATION OF THE SCALABLE MACROMODEL
Section 8.2.1 and Section 8.2.2 show that the generation of scalable macromodels
is an automated process. Nevertheless, the user has to specify the design space,
the frequency span and the accuracy for the model. The choice of the design
space g = [w1, w2, d12] has been previously discussed. The frequency span is
chosen equal to f ∈ [1.3 − 3.3] GHz to be wide enough to contain the filter
behavior of interest within it. The choice of the model accuracy is based on the
minimal attenuation desired in the stopband that is set equal to 30 dB in this
numerical example. The accuracy of the scalable macromodel has been set to
−30 dB based on the MAE measure (8.2).
The scalable macromodeling method of [Chem 14a] discussed in Section 8.2.2
has been implemented in Matlab R2012a and used to drive the Momentum
software with Adaptive Frequency Sampling (AFS) [ADS 14] to generate the
S-parameters at selected design space samples. AFS is a technique included in
ADS2011 Momentum that adaptively samples the frequency range and can be
used to efficiently provide the system response for a specified number of samples,
that are chosen freely in the band. The number of simulated frequency samples
nF obtained by AFS over the range f ∈ [1.3−3.3] GHz has been chosen equal to
301 to build the scalable macromodel. The steep changes in the behavior of the
S-parameters of the microwave filter with respect to frequency are hence well
captured.
The MAE (8.2) is used to asses the accuracy of the scalable macromodel. Ta-
ble 8.6 reports the total number of design space samples (estimation and vali-
dation), the worst case MAE (8.2) over the estimation and validation data, the
184 CHAPTER 8 A SCALABLE MACROMODELING METHODOLOGY FOR THE EFFICIENT DESIGN OF MICROWAVE
FILTERS

Table 8.6 Scalable macromodeling
# Samples CPU Time AccuracyGeneration Validation Modeling Data Gen. [dB]
72 45 36 min 35 s 1 h 55 min 21 s −30.48Average CPU Time for one ADS frequency sweep = 50 sAverage CPU Time for one macromodel frequency sweep = 19.5 msSpeed-up = 2564×
CPU time needed to run all the ADS Momentum estimation and validation sim-
ulations and the CPU time needed to obtain the scalable macromodel using the
sequential scheme coupled with the scalable macromodeling method [Chem 14a].
The average CPU time needed by ADS Momentum (using AFS) and the scalable
macromodel for one frequency sweep over 301 frequency points is also shown in
Table 8.6. This measure is crucial to judge the potential advantage of the pro-
posed approach for efficient design optimizations when compared to the direct
use of EM-based optimization schemes.
8.5.5 FILTER OPTIMIZATION
The scalable macromodel is used to perform multiple optimizations for this filter.
The optimization specifications on the S-parameters of the filter under study are:
|S21| < −LA1 dB fs1 ≤ f ≤ fs2, (8.8a)
|S21| > −LIL dB fp1 ≤ f ≤ fp2, (8.8b)
|S11| < −LRL dB fp1 ≤ f ≤ fp2, (8.8c)
|S21| < −LA2 dB fs3 ≤ f ≤ fs4, (8.8d)
|S21| > −LIL dB fp3 ≤ f ≤ fp4, (8.8e)
|S11| < −LRL dB fp3 ≤ f ≤ fp4, (8.8f)
|S21| < −LA3 dB fs5 ≤ f ≤ fs6. (8.8g)
with three optimization cases:
8.5 EXAMPLE: MICROSTRIP DUAL-BAND BANDPASS FILTER 185

Table 8.7 Dual-band bandpass filter: global optimization results using the macro-model.
Initial design Best optimal design # Function OptimizationCase (w1, w2, d12) (mm) (w∗1 , w
∗2 , d∗12) (mm) evaluations time
I [9.5, 1, 1.62] [9.66, 1, 1.44] 6557 5 min, 40 s
II [9.5, 1, 1.62] [10.4, 1.17, 1.38] 5456 5 min, 47 s
III [9.5, 1, 1.62] [10.3, 1.43, 1.25] 6675 5 min, 43 s
I.(fs1, fs2, fp1, fp2, fs3, fs4, fp3, fp4, fs5, fs6) =
(1.3, 1.7, 1.975, 2.025, 2.275, 2.325, 2.625, 2.675, 2.9, 3.3) GHz,
(LA1, LIL, LRL, LA2, LA3) = (−20,−3,−10,−20,−20) dB (8.9a)
II. (fs1, fs2, fp1, fp2, fs3, fs4, fp3, fp4, fs5, fs6) =
(1.3, 1.7, 1.975, 2.025, 2.275, 2.325, 2.625, 2.675, 2.9, 3.3) GHz,
(LA1, LIL, LRL, LA2, LA3) = (−20,−3,−10,−30,−20) dB (8.9b)
III. (fs1, fs2, fp1, fp2, fs3, fs4, fp3, fp4, fs5, fs6) =
(1.3, 1.6, 1.9, 1.95, 2.175, 2.25, 2.625, 2.675, 2.9, 3.3) GHz,
(LA1, LIL, LRL, LA2, LA3) = (−20,−3,−10,−20,−20) dB (8.9c)
As explained in Section 8.4, the global optimization function MultiStart in Mat-
lab R2012a is used to perform a global optimization with a cost function defined
in (8.4) using the previous specifications. 30 starting points are used for each
optimization case. For each optimization case, the function MultiStart found
multiple possible optimization solutions [w∗1 , w∗3 , d∗12] that satisfy the correspond-
ing specifications. The results of the three optimization cases are tabulated in
Table 8.7, where the best optimization solutions, the total number of function
evaluations and CPU time needed for the three global optimizations are shown.
Considering the average CPU time that is needed for one frequency sweep using
the EM solver and the scalable macromodel (see Table 8.6) and the number of
functions evaluations needed to perform the global optimizations in Table 8.7,
186 CHAPTER 8 A SCALABLE MACROMODELING METHODOLOGY FOR THE EFFICIENT DESIGN OF MICROWAVE
FILTERS

clearly shows that using the scalable macromodel allows a very efficient multiple
global optimization. The initial computational effort needed to generate the
scalable macromodel (see Table 8.6) becomes small compared to the CPU time
that is saved to perform the multiple global optimizations is considered.
Figure 8.5 shows the optimization results for Case I : The S-parameters are
shown before and after the optimization. The solid black lines show the spec-
ifications. From the two figures it is clearly seen that all the specifications are
satisfied. Similar results are for Case II and Case III as shown in Figure 8.6
and Figure 8.7. The green response curves denote the Momentum simulations
performed at the optimal solution points to verify that the model prediction (red
curves) is accurate. Note that there is a difference between the evaluation of the
macromodel and the EM-simulation for the optimized design. This difference is
however smaller than -30 dB, which is the error limit that was specified during
the the macromodel generation.
8.6 Discussion
Generating scalable macromodels becomes more computationally expensive with
an increasing number of design parameters. The so called ”curse of dimension-
ality” pops up in high-dimensional modeling problems. This affects two main
aspects of the modeling:
• the number of data samples needed to build and validate a model (and
then the CPU time to collect these data samples)
• The complexity (and then the CPU time) of the model generation when
the data samples are available
Working on fully regular design space grids to collect estimation and validation
data will make the complexity of the data to gathering increase in an exponential
way with respect to the number of design parameter. This issue can be mitigated
by using sequential sampling strategies that optimize the samples location in the
design space.
The modeling step for the technique [Chem 14a] will mainly suffer from an in-
creasing number of design parameters in the computation of the amplitude and
frequency scaling coefficients for each region of the design space. This issue can
be mitigated by exploiting parallelization strategies, since the scaling coefficients
computation for a design space region can be performed independently from the
other regions.
8.6 DISCUSSION 187
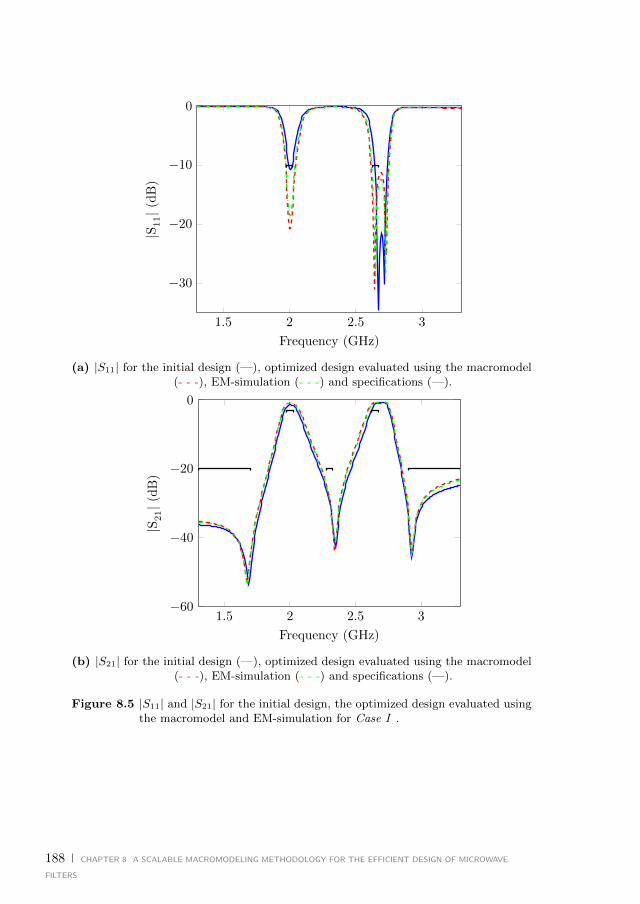
1.5 2 2.5 3
−30
−20
−10
0
Frequency (GHz)
|S11|(
dB
)
(a) |S11| for the initial design (—), optimized design evaluated using the macromodel(- - -), EM-simulation (- - -) and specifications (—).
1.5 2 2.5 3−60
−40
−20
0
Frequency (GHz)
|S21|(
dB
)
(b) |S21| for the initial design (—), optimized design evaluated using the macromodel(- - -), EM-simulation (- - -) and specifications (—).
Figure 8.5 |S11| and |S21| for the initial design, the optimized design evaluated usingthe macromodel and EM-simulation for Case I .
188 CHAPTER 8 A SCALABLE MACROMODELING METHODOLOGY FOR THE EFFICIENT DESIGN OF MICROWAVE
FILTERS

1.5 2 2.5 3−40
−30
−20
−10
0
Frequency (GHz)
|S11|(
dB
)
(a) |S11| for the initial design (—), optimized design evaluated using the macromodel(- - -), EM-simulation (- - -) and specifications (—).
1.5 2 2.5 3−60
−40
−20
0
Frequency (GHz)
|S21|(
dB
)
(b) |S21| for the initial design (—), optimized design evaluated using the macromodel(- - -), EM-simulation (- - -) and specifications (—).
Figure 8.6 |S11| and |S21| for the initial design, the optimized design evaluated usingthe macromodel and EM-simulation for Case II.
8.6 DISCUSSION 189

1.5 2 2.5 3−50
−40
−30
−20
−10
0
Frequency (GHz)
|S11|(
dB
)
(a) |S11| for the initial design (—), optimized design evaluated using the macromodel(- - -), EM-simulation (- - -) and specifications (—).
1.5 2 2.5 3−60
−40
−20
0
Frequency (GHz)
|S21|(
dB
)
(b) |S21| for the initial design (—), optimized design evaluated using the macromodel(- - -), EM-simulation (- - -) and specifications (—).
Figure 8.7 |S11| and |S21| for the initial design, the optimized design evaluated usingthe macromodel and EM-simulation for Case III.
190 CHAPTER 8 A SCALABLE MACROMODELING METHODOLOGY FOR THE EFFICIENT DESIGN OF MICROWAVE
FILTERS

8.7 Conclusion
In this chapter, we have introduced scalable macromodels in the design cycle of
microwave filters. We have discussed how to generate and use scalable macro-
models as a design tool for filters. The main advantage of these macromodels
is that they are cheap to evaluate with a suitable accuracy. Hence, the scalable
macromodels can replace the expensive EM solver during multiple optimizations
of the filter and then make these steps much less CPU time intensive. It is to be
noted that it also takes an initial computational effort to generate the macro-
model and that this must be done during the design cycle. However, this initial
computational effort that is needed to generate the scalable macromodel becomes
a little effort when the CPU time saved to perform multiple global optimizations
with respect to EM-based optimizations is considered. We have illustrated this
macromodeling-based design approach by applying it to the design of a state-
of-the-art microstrip dual-band bandpass filter. Although the generation of the
scalable macromodels is an automated process, it still requires some information
from a designer, namely the frequency span, the ranges of the design parameters
and the desired model accuracy. How a designer can hand this information to
the macromodel generation process has been explained in detail. We have finally
shown how the scalable macromodel can be used for multiple optimizations. The
corresponding numerical results confirm that the macromodeling-based design
approach works very well.
8.7 CONCLUSION 191


Conclusions
193


9Conclusions
In this work we investigate different model driven assisted design approaches for
the time-efficient design of microwave bandpass filters. We apply model assisted
design approaches not only to post-optimize the physical dimensions of the filter
but also to generate initial values for them.
In the first part of the thesis, we use a coupling matrix based approach. The
idea is to adjust the physical design parameters based on a comparison between
an extracted coupling matrix and the golden goal.
It is well known that coupling topologies may have multiple equivalent solutions
to the reconfiguration problem (Chapter 2). One of the main challenges is to
extract the physical solution starting from the simulated S-parameters of the
obtained design.
In Chapter 4 we develop a method that systematically extracts all possible solu-
tions corresponding to the implemented topology. We also propose a strategy to
model the second order effects (which are not included in the coupling topology
of the golden goal) by adding coupling parameters to the last row and column of
the extracted coupling matrix. The extraction of the coupling matrix of a mea-
sured SQ filter shows indeed that taking these second order effects into account
is indispensable to properly model the filter frequency response of the filter. We
also extract all the possible solutions for a CQ filter. This extraction shows
that from a mathematical point of view these solutions are equivalent. This
means that more information is required to identify the physically implemented
coupling matrix.
Chapter 5 shows that in the case of CQ and CT filters it is possible to identify the
physically implemented coupling matrix by applying some well chosen variations
to the physical structure of the filter. The main drawback of this approach is that
it requires several EM-simulations to determine the physical solution. We derive
195
an expression to predict how many EM-simulations (experiments) are required.
Once the physical solution is determined, we show that this knowledge allows
one to tune the filter. The extraction procedure only tells the user how far
the implemented coupling parameters are from the target values and not how
far the physical parameters are from their target values. As a consequence the
tuning procedure can still require a relatively high number of iterations for an
unexperienced designer to tune a filter.
Chapter 6 estimates the Jacobian matrix of the functional dependence of the
physically implemented coupling parameters to the design parameters using the
adjoint sensitivity of the S-parameters. Using the adjoint sensitivity provided by
the EM-simulator allows to estimate the Jacobian using only one EM-simulation.
Although including the adjoint sensitivity in such a simulation is numerically
more expensive, the method is more time-efficient in comparison to other tech-
niques based on finite difference extraction of the Jacobian matrix. A good
estimate of the Jacobian drastically reduces the number of iterations needed to
tune relatively complex filter structures. Another benefit of using the Jacobian
matrix is that it allows to determine the physically implemented coupling matrix
using only 1 EM-simulation.
In the second part of the thesis, we follow a metamodel based approach. The
main benefit of this kind of approach is that it generates accurate models for the
S-parameters or features of the S-parameters with an acceptably low number
of EM-simulations. These models are then used for 2 different kind of design
activities: the generation of initial values for the design parameters and the
post-optimization of the filter structures.
Chapter 7 automatically generates multidimensional design curves for the initial
dimensioning of coupled-resonator filters. The benefit of using a metamodel
approach with respect to the classical approach described in Chapter 3 is that
it requires a lower number of EM-simulations to cover a relatively wide range of
physical parameters. The multidimensional description allows to use the model
to generate initial values for multiple design scenarios.
Chapter 8 generates a scalable macromodel for a complex dual-band bandpass
filter. The benefit of a numerically much cheaper model when compared to the
EM-solver, is the speed of the optimization of the filter. The approach is slightly
different to what is normally done in filter optimization in the sense that the
time is invested in the model generation rather than in the post-optimization.
The model generation is automated, yet it still requires user-specified ranges
over which the design parameters can vary. Another benefit of the macromodel
196 CHAPTER 9 CONCLUSIONS

is that it can be used for several design scenarios if these ranges are chosen to
be wide enough. There is an important trade-off here: the larger the ranges are
chosen, the longer the generation will take, but the more useful the macromodel
will be for different design scenarios.
9.1 Comparison of the proposed approaches
The coupling matrix based approach allows one to tune coupled-resonator band-
pass filters having a high number of design parameters with a relatively small
number of EM-simulations. The number of EM-simulations decreases drastically,
if the Jacobian of the function relating the design parameters to the physically
implemented coupling parameters is well estimated. Similar techniques available
in the literature [Garc 04; Koza 06] estimate the Jacobian using finite differences,
such that the number of required EM-simulations increases. In this case, at least
one extra EM-simulation is required per design parameter. In this work, no extra
EM-simulations are required to estimate the Jacobian. Moreover the Jacobian
also offers a criterion to determine the physically implemented coupling matrix
in the case of multiple solutions. Note however that if the Jacobian is not avail-
able, extra EM-simulations are required to determine the physical couplings in
the case of multiple solutions.
Due to the curse of dimensionality, the metamodel approach requires too many
EM-simulations if the number of design parameters exceeds 4. In the case of
a low number of design parameters, the number of EM-simulation required to
generate the metamodel depends on the desired accuracy and how smooth the
S-parameters behave as a function of the design parameters. This approach has
not been applied to the CQ and CT filters, because of the high number of design
parameters.
Both approaches offer physical insight in the filter, be it in a different way. The
coupling matrix relates the coupling parameters to the design parameters. The
coupling matrix however does not model all off the effects: frequency dependent
coupling, higher order mode resonances, etc. are not included in this model.
Moreover the model is only valid in a narrow-band around the center frequency.
Also the parasitic couplings are not uniquely identified. The extraction proce-
dure proposed in Chapter 4 however proposes a strategy to handle the presence of
these parasitic couplings. Including the Jacobian offers even more insight, since
it locally predicts the coupling parameters variation as a function of the design
parameter variations. A metamodel on the other hand covers an entire region in
the design space. Since such a model is numerically cheap to evaluate, it allows
9.1 COMPARISON OF THE PROPOSED APPROACHES 197

the user to explore the design space by for example sweeping a design parameter
and plotting the corresponding S-parameters (or features of the S-parameters).
This makes the metamodel an ideal candidate for generating design curves.
As discussed in Chapter 6 coupling matrix based optimization does not suffer of
the presence of local minima. This can however not be guaranteed for methods
that optimize S-parameter based cost functions [Band 94a] or the position of
the poles and the zeros [Koza 02].
If the region in the design space is sufficiently large, the metamodel is able to
handle multiple design scenarios as illustrated in Chapter 8. The coupling matrix
based approach does not have this property.
Finally the coupling matrix based approach only handles narrow-band coupled-
resonator bandpass filters. Thus this approach is not applied to the dual-band
filter discussed in Chapter 8. The metamodel approach can be applied for dif-
ferent kind of filters, which do not necessarily have to fulfill the coupling matrix
hypotheses. The metamodel is even capable of modeling sub-blocks of the fil-
ter, such as individual resonators or resonator pairs. Therefore the metamodel
approach is more general.
If the filter fulfills the coupling matrix hypotheses, we advise to use the coupling
matrix approach. If in addition the EM-simulator provides the adjoint sensitiv-
ities, we advise to estimate the Jacobian. For other filter structures with a low
number of design parameters, we advise to use the metamodel approach.
Coupling Matrix Jacobian MetamodelEM-simulations + ++ -
Design parameters ++ ++ - -Physical insight + ++ +Local minima + + -Multiple design scenarios + + -Generality - - - - ++
Table 9.1 Comparison of the different properties of the proposed approaches.
198 CHAPTER 9 CONCLUSIONS
9.2 Main contributions
In this section we briefly highlight the main contributions of this work.
Coupling Matrix Approach:
• Coupling matrix extraction method that systematically extracts all possi-
ble solutions.
• Novel strategy to determine the physically implemented coupling matrix
in the case of cascaded topologies.
• Novel method to estimate the Jacobian of the function relating design
parameters to the coupling parameters. The main advantage is that esti-
mation only requires one EM-simulation.
• Development of Jacobian based criterion to determine the physically im-
plemented coupling matrix.
Metamodel Approach:
• Development of a metamodel for the efficient generation of the design
curves. The metamodels models the couplings between 2 resonators and
external quality factors, rather than the S-parameters.
• Inclusion of the metamodel in the design cycle of filters. We show that the
metamodel can be re-used for multiple design scenarios.
9.2 MAIN CONTRIBUTIONS 199


10Preliminary Results and Future Work
This chapter briefly summarizes some preliminary results and ideas for future
work. Section 10.1 proposes to generate a parametric model of the physically im-
plemented coupling matrix. This work has led to some preliminary results which
were presented at European Microwave Conference 2015 (EuMC) [Caen 15b].
For convenience of the reader the article has been added in Appendix A. The
method did already yield some interesting results, but they are however not
mature enough to be included fully in the thesis.
10.1 Preliminary Results: Parametric Modeling of the Coupling Param-eters
The idea of the method proposed in [Caen 15b] is to model each physically
implemented coupling parameter separately as a function of a set of well cho-
sen design parameters. As a model structure we propose to use multi-variable
polynomials of order 2. This model is inspired by the fact that in the region of
interest the behavior of an inter-resonator coupling as a function of the inter-
resonator spacing can be well approximated by a quadratic function [Amar 06].
In Chapter 6 we have however seen that coupling parameters also depend on
other design parameters, albeit to a lesser extent. We model their effect on the
coupling using a linear term instead of a quadratic term in the multi-variable
polynomial.
The eventual model for the entire filter is thus a set of nc multi-variable polyno-
mials of order 2. Here nc is the number of coupling parameters to be modeled.
This corresponds to 1 polynomial for each modeled coupling parameter. In order
to keep the complexity and the generation time of the model relatively low, we
do not take into account all of the design parameters to model the behavior of
a single coupling parameter, but we pre-select those that are known to have a
relevant effect. Consider for example a cascaded quadruplet filter: a coupling in
201

the first quadruplet is only modeled as a function of geometrical parameters in
the first quadruplet, since the effect of design parameters in the second quadru-
plet is negligible. This assumption allows to break the curse of dimensionality
which can be a serious problem in the case of high number of design parameters,
as is discussed in Chapter 8.
The minimum number of EM-simulations required to generate the model for
the entire filter corresponds to the maximal number of coefficients in one of
the nc polynomial models. The maximum number of coefficients is denoted as
na. The generation of the model is summarized next: the geometrical design
parameters are varied in a random way over the region of interest, which is chosen
as is discussed in Chapter 8. For each random set of geometrical parameters,
the corresponding filter structure is simulated. Starting from the simulated S-
parameters, the corresponding coupling matrix is extracted for each geometry
using the techniques described in Chapter 4 and Chapter 5. This yields na
simulated filters and na corresponding coupling matrices. Finally the multi-
variable polynomials are estimated for each coupling matrix separately in least-
squares sense.
The aim of the model is to tune the filter by solving the non-linear set of equa-
tions for the target values of the coupling matrix. So far this has not yielded the
desired results, since the effect of parasitic couplings was not included. As future
work we propose to model the parasitic effects too to take them into account
during the tuning. Another potential benefit to be investigated is to re-use the
model for multiple design scenarios. This implies however that the ranges of the
varied geometrical parameters must be enlarged, which can possibly deteriorate
the quality of the quadratic model.
10.2 Future Work
10.2.1 RE-OPTIMIZATION OF THE TARGET MATRIX
In Chapter 5 and Chapter 6 we have seen that some filter structures suffer heavily
from the presence of parasitic coupling. In order to tune the filters taking into
account these effects, we re-optimize the diagonal elements of the target matrix.
Next, the filter is tuned to the re-optimized target matrix. This strategy assumes
that parasitic coupling do not change due to further adjustments of the filter
structure. This is however not the case: when the filter is adjusted this affects
202 CHAPTER 10 PRELIMINARY RESULTS AND FUTURE WORK

the parasitic couplings as well, which requires a new adjustment of the target
matrix. This is not done at the moment. To properly handle the variation of
the parasitic couplings during the tuning procedure, a new strategy based on
re-optimization of the target coupling matrix must be further developed.
10.2.2 EXTENSION TO OTHER COUPLING TOPOLOGIES
Throughout this thesis, we have applied our modeling strategies mainly to cas-
caded triplet and quadruplet topologies. Since these topologies have multiple
solutions to the reduction problem, they are interesting to show the utility of
the proposed methods in the case of non-canonical topologies. There are how-
ever other non-canonical topologies such as extended box topologies. For this
kind of topologies the relations between the TZs and the coupling matrix is less
straightforward. The identification of the physical solution is therefore harder
to obtain. We believe that the use of Jacobian criterion introduced in Chapter 6
is the best strategy. Remark however that the number of admissible solutions
grows rapidly for such topologies and thus many Jacobians must be checked.
Another contribution could be to test the methods for filters implemented in
other technologies such as waveguide and dielectric resonator filters.
10.2.3 FABRICATION AND MEASUREMENTS
So far only one of the designed filters has been fabricated and measured. The
measured response showed some differences with respect to the simulated re-
sponse, which were due to the fact that the substrate parameters in the simulator
did not perfectly match with the one of the substrate used for fabrication. In
the future we plan to measure the other designs as well.
10.2 FUTURE WORK 203


List of scientific publications
JOURNAL PAPERS
Caenepeel, M., Chemmangat, K., Ferranti, F., Rolain, Y., Dhaene, T. and
Knockaert, L. (2016). Scalable macromodelling methodology for the efficient
design of microwave filters. IET Microwaves, Antennas & Propagation, Vol. 10,
No. 5, pp. 579–586
PEER REVIEWED CONFERENCE PAPERS (IN WEB OF SCIENCE)
Caenepeel, M. and Rolain, Y. (2014). Macromodeling of narrow-band band-
pass filters based on interpolation of coupling matrices, In Proceedings of the
2014 IEEE 18th Workshop on Signal and Power Integrity (SPI), pp. 1–4, Ghent,
Belgium, 11–14 May 2014.
Caenepeel, M., Seyfert, F., Rolain, Y. and Olivi, M. (2015). Microwave filter
design based on coupling topologies with multiple solutions, In Proceedings of
the 2015 IEEE MTT-S International Microwave Symposium (IMS), pp. 1–4,
Phoenix, AZ, USA, 17–22 May 2015.
Caenepeel, M., Seyfert, F., Rolain, Y. and Olivi, M. (2015). Parametric mod-
eling of the coupling parameters of planar coupled-resonator microwave filters, In
Proceedings of the 2015 European Microwave Conference (EuMC), pp. 538–541,
Paris, France, 7–10 Sept. 2015.
Caenepeel, M., Ferranti, F. and Rolain, Y. (2016). Efficient and Automated
Generation of Multidimensional Design Curves for Coupled-Resonator Filters
using System Identification and Metamodels, In Proceedings of the 2016 Inter-
national Conference on Synthesis, Modeling, Analysis and Simulation Methods
and Applications to Circuit Design (SMACD), Lisbon, Portugal, 27–30 June,
Accepted For Publication
Gevers, M., Caenepeel, M. and Schoukens, J.(2012). Experiment design for
205

the identification of a simple Wiener system, In 2012 IEEE 51st IEEE Confer-
ence on Decision and Control (CDC), pp. 7333–7338, Maui, USA, 10–13 Dec.
Barachart, L., Caenepeel, M. and Rolain, Y.(2015). Wiener-Hammerstein sys-
tems and harmonic identification, In 2015 IEEE International Instrumentation
and Measurement Technology Conference (I2MTC) Proceedings, pp. 612–617 ,
Pisa, Italy, 11–14 May 2015.
206 CHAPTER 10 PRELIMINARY RESULTS AND FUTURE WORK

Appendices
207


AAppendix A
This appendix contains the paper entitled Parametric Modeling of the Coupling
Parameters of Planar Coupled-Resonator Microwave Filters as it appeared in
the Proceedings of European Microwave Conference 2015 (EuMC).
209

Parametric Modeling of the Coupling Parameters ofPlanar Coupled-Resonator Microwave Filters
Matthias Caenepeel∗†, Fabien Seyfert†, Yves Rolain∗ and Martine Olivi†∗ELEC, Vrije Universiteit Brussel
Pleinlaan 2, 1050 Elsene, Belgium Email: [email protected]†APICS, INRIA Sophia Antipolis
2004 Route des Lucioles, 06902 Valbonne, France Email: [email protected]
Abstract—The design of planar coupled-resonator microwavefilters is widely based on coupling matrix theory. In this frame-work a coupling matrix is first obtained during the synthesisstep. Next this coupling matrix is physically implemented bycorrectly dimensioning the geometrical parameters of the filter.The implementation step is carried out using simplified empiricaldesign curves relating the coupling coefficients and geometricalparameters. The curves typically only provide initial values andEM optimization is often needed such that the filter responsemeets the specifications. This paper proposes to extract paramet-ric models that relate the filters design parameters directly tothe coupling parameters. The advantage of such models is thatthey allow to tune the filter in a numerically cheap way and thatthey provide physical insight in the filters behavior. This paperexplains how such models can be extracted from EM simulationsand illustrates the technique for the design of an 8 pole cascadedquadruplet filter in a microstrip technology.
I. INTRODUCTION
Coupling matrix theory is widely used to design narrow-band bandpass microwave filters [1], [2] in which the filteris modeled as a low-pass coupled resonator circuit (Fig. 1)[3]. The design process begins therefore by the derivation ofa filtering characteristic meeting the filtering specifications.In a second step this characteristic is realized by a circuit.Next the circuit elements (coupling parameters) must be imple-mented physically by correctly dimensioning the geometricalparameters of the filter. An initial dimensioning of the filteris carried out by means of simplified empirical design curvesrelating the coupling parameters and geometrical parameters ofthe filter [4]. These curves however typically do not take intoaccount more complex interactions, such as loading effects ofthe resonators by the couplings, which require that the initialvalues must be optimized to meet the filter specifications.Several electomagnetic (EM) optimization techniques existin the literature [2]. Although these techniques prove to besuccessful, there are still some disadvantages. The computationtime grows rapidly with the complexity of the design (numberof geometrical parameters). When the filter specificationschange even slightly, the whole optimization process mustbe relaunched. Moreover the optimization process does notprovide any physical insight in the filters behavior.Literature shows that the coupling parameters are smoothfunctions of the controlling geometrical parameters [4], [5].Therefore we propose to approximate this relation as aquadratic multivariate polynomial. The multivariate characterstems from the fact that we also take into account severalparameters to model second order effects such as the loading
of the resonators. The main advantage is that these models arenumerically cheap to evaluate and provide physical insight inthe filters behavior. Moreover they can be re-used in variousdesign scenarios. This paper explains how such parametricmodels can be extracted from EM simulations.A crucial step in the modeling process, is the extraction of thecoupling parameters from the simulated scattering data (S-parameters).
State-of-the-art gradient-based parameter extraction meth-ods optimize the generalized low-pass network such that thenetworks frequency response meets the measured or simulatedresponse [6], [7]. In the case where multiple solutions arepossible, these methods do not necessarily converge to theimplemented circuit. Section II shortly describes a three stageextraction process that overcomes this drawback. The S-parameters and network parameters are related as follows [8]S(s) = I + C(sI −A)−1Ct with
C =
[i√
2Rin 0 . . . 00 . . . 0 i
√2Rout
], (1)
A = −R− iM. (2)
The first step identifies a rational matrix from the simulatedS-parameters [8]. The second step finds all possible circuitalrealizations of the previously computed rational approximationwith a specified coupling topology. The third step finallydeciphers the physically implemented matrix.Section III describes how, given the physical coupling param-eters, the quadratic multivariate polynomials are estimated ina least-squares sense. Eventually the modeling technique isillustrated for a design of an 8 pole cascaded quadruplet filterin microstrip technology (Fig.2). The design example showsthat the models can be used to improve the filter responsedrastically.
II. COUPLING PARAMETER EXTRACTION
This section describes the three stage parameter extractionprocedure. First a canonical solution is extracted. Next allpossible solutions corresponding to the desired topology areidentified. Finally the physically implemented coupling matrixis identified among these solutions using prior knowledge. Amore detailed explanation can be found in [9].The first step identifies a rational matrix from the simulated

Fig. 1: Low-pass prototype network model for a general cross-coupled resonator filter.
S-parameters. The scattering data is first transformed to thelow-pass domain. Next a rational common denominator matrixis identified using the toolbox PRESTO-HF [10] . The orderof the common denominator n is chosen to be equal to thenumber of resonators. The rational matrix is then transformedinto the canonical arrow form of the coupling matrix.The second step finds all possible realizations for the givenrational matrix corresponding to a given topology. This topol-ogy corresponds to the topology used during the synthesis step.It is however possible that for certain geometrical values, thecorresponding S-parameters can not be realized with the idealtopology. E.g. the response is asymmetric while the topologyis only able to realize symmetric responses. Such a situationmight occur when frequency offsets and/or extra couplings arepresent in the physical structure. To handle these situations theallowable topology is extended to a topology that is close tothe original topology but still allows to capture these effects.This corresponds to expanding the class of realizable responsesof the filter. Next the arrow form obtained during step one istransformed to the new topology using the toolbox DEDALE-HF [11]. The only drawback of this extended topology isthat it concentrates the extra couplings at fixed positions inthe matrix, while physically they might occur somewhereelse. To compensate for this unwanted effect, the solutionsfound by DEDALE-HF are optimized by means of similaritytransformations on the coupling matrix. This optimizationprocess minimizes the influence of the extra couplings byredistributing them over the whole matrix. The influence ofthe extra couplings is expressed by a relative measure c:
c =Σ(Mextra)2
Σ(Mall)2(3)
which is the sum of squares of the extra couplings (Mextra)over the sum of the squares of all the couplings (Mall).During the last step of the process, the physically implementedcoupling matrix is estimated among the solutions found duringstep 2. The choice of this matrix is based on some physicalassumptions. First of all we assume that the couplings presentin the original topology are dominant in the implemented filter.Therefore only those solutions for which c is sufficiently smallare considered. Since we use the extraction method in a designcontext, we assume that the implemented couplings are closeto the ideal ones found during the synthesis step. Thereforethe solutions for which the 2-norm of the difference to theideal coupling matrix is minimal is chosen. To model thecouplings as a function of the geometrical parameters, the filteris simulated for several geometrical values. This informationallows to check whether the choice of the physical matrix isconsistent with the geometry. E.g. when the spacing betweenresonator i and k is varied, this should mainly affect the
1
2 3
4
5
6 7
8
Fig. 2: Top-view of a square open-loop resonator cascadedquadruplet filter and the design parameters sik, gi, tin andtout.
coupling Mik. If this is not the case, the solution that iscoherent with the geometric variation, is chosen instead.
III. MULTIVARIATE QUADRATIC APPROXIMATION
The design curves that are available in the literature showthat the behavior of coupling parameters as a function ofthe geometrical parameters is smooth [4], [5]. Therefore wepropose to model the coupling parameters using multivariatepolynomials of a maximal degree of 2. Since the processdescribed in section II, extracts the physical coupling matrix,it is possible to relate a coupling parameter directly to a setof geometrical parameters.We illustrate this with the example of 2 coupled resonators.It is known that the coupling between 2 resonators dependsstrongly on the spacing between the resonators, but is alsoaffected by a possible offset introduced by spacings betweenother adjacent resonators (Fig.3). In this case we propose touse the following model:
Mik = a1s2ik + b1sik + b2d + c1 (4)
where sik is the spacing between the resonators and d repre-sents the offset. In this case 4 coefficients a1, b1, b2 and c1 mustbe estimated. This requires at least 4 different EM simulations.The mesh that is used for the different simulations howevermight differ slightly since it depends on the geometry. Thisdifference together with the error norm between the rationalmodel and the EM simulation used during the extraction step,introduce an error on the extracted coupling matrices. To avoidthat the parametric model of the coupling parameter wouldmodel these effects as well, we propose to use at least 2 timesmore simulations than what is minimally needed to estimatethe coefficients.The geometrical values for which the filter must be simulatedare selected as follows. First the initial values for the geomet-rical parameters are determined using the design curves. Nextthe physical coupling matrix for this structure is extracted.This coupling matrix gives an idea of the distance betweenthe initial design and the ideal design. This allows to deter-mine a validity interval around each design parameter. Valuesfor each geometrical parameter are then randomly generated

Fig. 3: Top-view of 2 coupled resonators, where sik is thespacing between them and d is a possible offset.
0.9 0.92 0.94 0.96 0.98 1 1.02 1.04 1.06 1.08 1.1−70
−60
−50
−40
−30
−20
−10
0
Frequency (GHz)
Magnitude S21
(dB)
Fig. 4: Magnitude of S21 for the initial (red) and final (blue)design.
within this interval. The number of values corresponds tothe proposed number of simulations needed to estimate theparametric models. The filter is simulated for all these setsof values. Once the EM simulations are gathered, the couplingparameters are extracted using the method described in sectionII. The couplings together with the geometrical parameters arethen used to estimate a parametric model for each couplingparameter in least-squares sense.
IV. EXAMPLE
The design of an 8-pole cascaded quadruplet microstripfilter consisting of square open-loop resonators (Fig.2) is usedto illustrate the proposed method. The filter is designed fora center frequency fc of 1 GHz and fractional bandwidthFBW of 0.06. The ideal coupling matrix is synthesized usingDEDALE-HF. The synthesis step yields 2 possible solutionsamong which one is chosen. The filter is implemented in aRT/duroid substrate with a relative permittivity 10.2. The initialdimensions of the filter are obtained using empirical formulaederived for the coupling coefficients between square open-loopresonators [12]. The filter is simulated using ADS Momentum2014 [13]. Fig. 4 and 5 show that the responses can clearly beimproved with respect to center frequency, insertion loss andbandwidth.
There are three types of coupling parameters that poten-tially need to be tuned and thus modeled:
0.9 0.92 0.94 0.96 0.98 1 1.02 1.04 1.06 1.08 1.1−35
−30
−25
−20
−15
−10
−5
0
Frequency (GHz)
Magnitude S11
(dB)
Fig. 5: Magnitude of S11 for the initial (red) and final (blue)design.
• Inter-resonator couplings Mik where i 6= k
• Center frequency offsets Mkk
• Normalized input/output impedances R1 and R2 re-spectively
It is well known that inter-resonator couplings mainly de-pend on the spacing between the resonators. Spacings betweenother resonators can introduce an extra offset (Fig.3). E.g. thecoupling between resonator 1 and 2 mainly depends on thedistance s12. The spacing between resonator 1 and 4, labeleds14 and the spacing between 2 and 3, labeled s23 introduce anoffset |s14−s23|2 . Thus we can model this coupling as:
M12 = a1s212 + b1s12 + b2(
|s14 − s23|2
) + c1 (5)
The same reasoning can be repeated for the other inter-resonator couplings.
The diagonal elements Mkk express the difference betweenthe center frequency of the filter and the resonance frequencyfk of resonator k. fk is directly related to the length of theresonator and thus to gk, but also depends on the loading ofthe resonator influences fk. This loading is modeled by meansof the distances between the neighboring resonators. Thereforewe propose as a model:
Mkk = a1g2k + b1gk + b2sk−1,k + b3sk,k+1 + b1 (6)
if k 6= 1, n and
Mkk = a1g2k+b1gk+b2sk−1,k+b3sk,k+1+b4tin/out+c1 (7)
if k = 1 or n. The normalized input and output impedancesmainly depend on the position of the input and output feedinglines. The length of the lines however also has an effect.Therefore we propose a model:
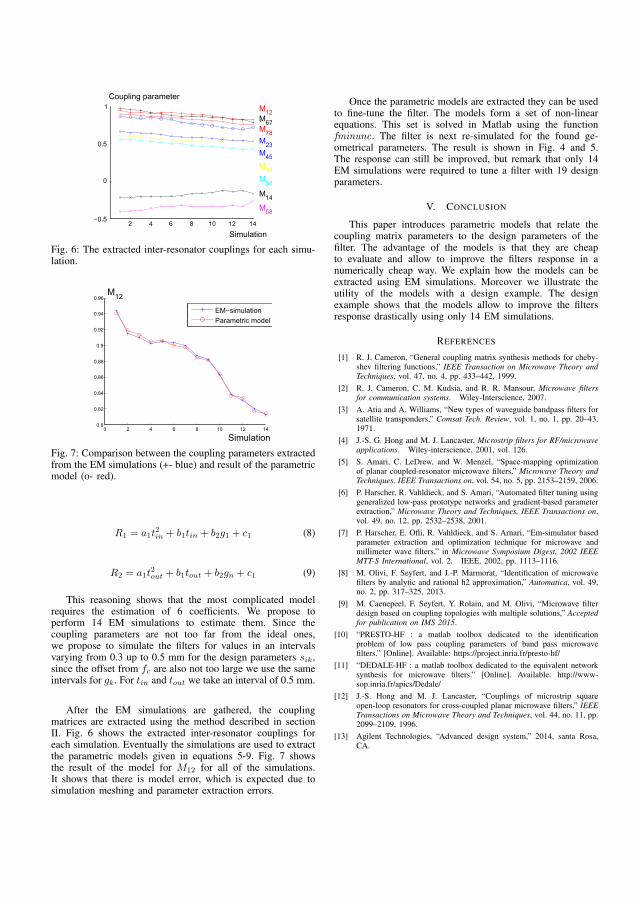
2 4 6 8 10 12 14−0.5
0
0.5
1
Simulation
Coupling parameter
M12
M23
M14
M34
M45
M56
M58
M67
M78
Fig. 6: The extracted inter-resonator couplings for each simu-lation.
0 2 4 6 8 10 12 140.8
0.82
0.84
0.86
0.88
0.9
0.92
0.94
0.96
Simulation
M12
EM−simulation
Parametric model
Fig. 7: Comparison between the coupling parameters extractedfrom the EM simulations (+- blue) and result of the parametricmodel (o- red).
R1 = a1t2in + b1tin + b2g1 + c1 (8)
R2 = a1t2out + b1tout + b2gn + c1 (9)
This reasoning shows that the most complicated modelrequires the estimation of 6 coefficients. We propose toperform 14 EM simulations to estimate them. Since thecoupling parameters are not too far from the ideal ones,we propose to simulate the filters for values in an intervalsvarying from 0.3 up to 0.5 mm for the design parameters sik,since the offset from fc are also not too large we use the sameintervals for gk. For tin and tout we take an interval of 0.5 mm.
After the EM simulations are gathered, the couplingmatrices are extracted using the method described in sectionII. Fig. 6 shows the extracted inter-resonator couplings foreach simulation. Eventually the simulations are used to extractthe parametric models given in equations 5-9. Fig. 7 showsthe result of the model for M12 for all of the simulations.It shows that there is model error, which is expected due tosimulation meshing and parameter extraction errors.
Once the parametric models are extracted they can be usedto fine-tune the filter. The models form a set of non-linearequations. This set is solved in Matlab using the functionfminunc. The filter is next re-simulated for the found ge-ometrical parameters. The result is shown in Fig. 4 and 5.The response can still be improved, but remark that only 14EM simulations were required to tune a filter with 19 designparameters.
V. CONCLUSION
This paper introduces parametric models that relate thecoupling matrix parameters to the design parameters of thefilter. The advantage of the models is that they are cheapto evaluate and allow to improve the filters response in anumerically cheap way. We explain how the models can beextracted using EM simulations. Moreover we illustrate theutility of the models with a design example. The designexample shows that the models allow to improve the filtersresponse drastically using only 14 EM simulations.
REFERENCES
[1] R. J. Cameron, “General coupling matrix synthesis methods for cheby-shev filtering functions,” IEEE Transaction on Microwave Theory andTechniques, vol. 47, no. 4, pp. 433–442, 1999.
[2] R. J. Cameron, C. M. Kudsia, and R. R. Mansour, Microwave filtersfor communication systems. Wiley-Interscience, 2007.
[3] A. Atia and A. Williams, “New types of waveguide bandpass filters forsatellite transponders,” Comsat Tech. Review, vol. 1, no. 1, pp. 20–43,1971.
[4] J.-S. G. Hong and M. J. Lancaster, Microstrip filters for RF/microwaveapplications. Wiley-interscience, 2001, vol. 126.
[5] S. Amari, C. LeDrew, and W. Menzel, “Space-mapping optimizationof planar coupled-resonator microwave filters,” Microwave Theory andTechniques, IEEE Transactions on, vol. 54, no. 5, pp. 2153–2159, 2006.
[6] P. Harscher, R. Vahldieck, and S. Amari, “Automated filter tuning usinggeneralized low-pass prototype networks and gradient-based parameterextraction,” Microwave Theory and Techniques, IEEE Transactions on,vol. 49, no. 12, pp. 2532–2538, 2001.
[7] P. Harscher, E. Ofli, R. Vahldieck, and S. Arnari, “Em-simulator basedparameter extraction and optimization technique for microwave andmillimeter wave filters,” in Microwave Symposium Digest, 2002 IEEEMTT-S International, vol. 2. IEEE, 2002, pp. 1113–1116.
[8] M. Olivi, F. Seyfert, and J.-P. Marmorat, “Identification of microwavefilters by analytic and rational h2 approximation,” Automatica, vol. 49,no. 2, pp. 317–325, 2013.
[9] M. Caenepeel, F. Seyfert, Y. Rolain, and M. Olivi, “Microwave filterdesign based on coupling topologies with multiple solutions,” Acceptedfor publication on IMS 2015.
[10] “PRESTO-HF : a matlab toolbox dedicated to the identificationproblem of low pass coupling parameters of band pass microwavefilters.” [Online]. Available: https://project.inria.fr/presto-hf/
[11] “DEDALE-HF : a matlab toolbox dedicated to the equivalent networksynthesis for microwave filters.” [Online]. Available: http://www-sop.inria.fr/apics/Dedale/
[12] J.-S. Hong and M. J. Lancaster, “Couplings of microstrip squareopen-loop resonators for cross-coupled planar microwave filters,” IEEETransactions on Microwave Theory and Techniques, vol. 44, no. 11, pp.2099–2109, 1996.
[13] Agilent Technologies, “Advanced design system,” 2014, santa Rosa,CA.


Bibliography
[ADS 14] “ADS Momentum”. www.keysight.com, 2014.
[Amar 00a] S. Amari. “Sensitivity analysis of coupled resonator filters”. IEEE
Transactions on Circuits and Systems II: Analog and Digital Signal
Processing, Vol. 47, No. 10, pp. 1017–1022, 2000.
[Amar 00b] S. Amari. “Synthesis of cross-coupled resonator filters using an ana-
lytical gradient-based optimization technique”. IEEE Transactions
on Microwave Theory and Techniques, Vol. 48, No. 9, pp. 1559–
1564, 2000.
[Amar 06] S. Amari, C. LeDrew, and W. Menzel. “Space-mapping optimiza-
tion of planar coupled-resonator microwave filters”. IEEE Trans-
actions on Microwave Theory and Techniques, Vol. 54, No. 5,
pp. 2153–2159, 2006.
[Amar 99] S. Amari. “On the maximum number of finite transmission zeros of
coupled resonator filters with a given topology”. IEEE Microwave
and Guided Wave Letters, Vol. 9, No. 9, pp. 354–356, 1999.
[Ande 73] B. Anderson and S. Vongpanitlerd. Network analysis and synthesis.
NJ, Prentice-Hall, 1973.
[Arnd 04] F. Arndt, J. Brandt, V. Catina, J. Ritter, I. Rullhusen, J. Dauels-
berg, U. Hilgefort, and W. Wessel. “Fast CAD and optimiza-
tion of waveguide components and aperture antennas by hybrid
MM/FE/MoM/FD methods-state-of-the-art and recent advances”.
IEEE Transactions on Microwave Theory and Techniques, Vol. 52,
No. 1, pp. 292–305, 2004.
215

[Atia 71] A. E. Atia and A. E. Williams. “New types of waveguide bandpass
filters for satellite transponders”. Comsat Tech. Review, Vol. 1,
No. 1, pp. 20–43, 1971.
[Atia 72] A. E. Atia and A. E. Williams. “Narrow-bandpass waveguide fil-
ters”. EEE Transactions on Microwave Theory and Techniques,
Vol. 20, No. 4, pp. 258–265, 1972.
[Atia 74] A. E. Atia, A. E. Williams, and R. Newcomb. “Narrow-band
multiple-coupled cavity synthesis”. IEEE Transactions on Circuits
and Systems, Vol. 21, No. 5, pp. 649–655, 1974.
[Atia 98] W. A. Atia, K. A. Zaki, and A. E. Atia. “Synthesis of general
topology multiple coupled resonator filters by optimization”. In:
Microwave Symposium Digest, 1998 IEEE MTT-S International,
pp. 821–824, IEEE, Baltimore, MD, USA, 7-12 June 1998.
[Bahl 77] I. Bahl and R. Garg. “Simple and accurate formulas for a microstrip
with finite strip thickness”. Proceedings of the IEEE, Vol. 65, No. 11,
pp. 1611–1612, 1977.
[Band 88] J. W. Bandler and S. H. Chen. “Circuit optimization: the state of
the art”. IEEE transactions on Microwave Theory and Techniques,
Vol. 36, No. 2, pp. 424–443, 1988.
[Band 94a] J. W. Bandler, R. M. Biernacki, S. H. Chen, D. Swanson, and S. Ye.
“Microstrip filter design using direct EM field simulation”. IEEE
Transactions on Microwave Theory and Techniques, Vol. 42, No. 7,
pp. 1353–1359, 1994.
[Band 94b] J. W. Bandler, R. M. Biernacki, S. H. Chen, D. G. Swanson Jr, and
S. Ye. “Microstrip filter design using direct EM field simulation”.
Microwave Theory and Techniques, IEEE Transactions on, Vol. 42,
No. 7, pp. 1353–1359, 1994.
[Basl 10] P. Basl, R. Gohary, M. Bakr, and R. Mansour. “Modelling of elec-
tromagnetic responses using a robust multi-dimensional Cauchy in-
terpolation technique”. IET Microwaves, Antennas Propagation,,
Vol. 4, No. 11, pp. 1955 –1964, Nov. 2010.
[Bele 68] V. Belevitch. Classical network theory. Holden-Day, 1968.
216

[Bell 82] H. C. Bell Jr. “Canonical asymmetric coupled-resonator filters”.
IEEE Transactions on Microwave Theory and Techniques, Vol. 30,
No. 9, pp. 1335–1340, 1982.
[Belo 75] E. Belohoubek and E. Denlinger. “Loss considerations for microstrip
resonators (short papers)”. IEEE Transactions on Microwave The-
ory and Techniques, Vol. 23, No. 6, pp. 522–526, 1975.
[Ben 03] A. Ben-Israel and T. N. Greville. Generalized inverses: theory and
applications. Vol. 15, Springer Science & Business Media, 2003.
[Bila 99] S. Bila, D. Baillargeat, M. Aubourg, S. Verdeyme, P. Guillon,
C. Zanchi, J. Sombrin, J. Grimm, and L. Baratchart. “Direct
electromagnetic optimisation method for microwave filter design”.
Electronics Letters, Vol. 35, No. 5, pp. 400–401, 1999.
[Broy 65] C. G. Broyden. “A class of methods for solving nonlinear simul-
taneous equations”. Mathematics of Computation, Vol. 19, No. 92,
pp. 577–593, 1965.
[Caen 15a] M. Caenepeel, F. Seyfert, Y. Rolain, and M. Olivi. “Microwave filter
design based on coupling topologies with multiple solutions”. In:
Microwave Symposium (IMS), 2015 IEEE MTT-S International,
pp. 1–4, IEEE, Phoenix, AZ, USA, 17-22 May 2015.
[Caen 15b] M. Caenepeel, F. Seyfert, Y. Rolain, and M. Olivi. “Parametric
modeling of the coupling parameters of planar coupled-resonator
microwave filters”. In: Microwave Conference (EuMC), 2015 Eu-
ropean, pp. 538–541, IEEE, Paris, France, 7-10 Sept 2015.
[Caen 16] M. Caenepeel, K. Chemmangat, F. Ferranti, Y. Rolain, T. Dhaene,
and L. Knockaert. “Scalable macromodelling methodology for the
efficient design of microwave filters”. IET Microwaves, Antennas &
Propagation, Vol. 10, No. 5, pp. 579–586, 2016.
[Came 03] R. J. Cameron. “Advanced coupling matrix synthesis techniques for
microwave filters”. IEEE Transactions on Microwave Theory and
Techniques, Vol. 51, No. 1, pp. 1–10, 2003.
[Came 05] R. J. Cameron, J.-C. Faugere, and F. Seyfert. “Coupling matrix
synthesis for a new class of microwave filter configuration”. In:
Microwave Symposium Digest, 2005 IEEE MTT-S International,
p. 4, Long Beach, CA, USA, 12-17 June 2005.
217

[Came 07a] R. J. Cameron, J.-C. Faugere, F. Rouillier, and F. Seyfert. “Ex-
haustive approach to the coupling matrix synthesis problem and
application to the design of high degree asymmetric filters”. Inter-
national Journal of RF and Microwave Computer-Aided Engineer-
ing, Vol. 17, No. 1, pp. 4–12, 2007.
[Came 07b] R. J. Cameron, C. M. Kudsia, and R. R. Mansour. Microwave filters
for communication systems. Wiley-Interscience, 2007.
[Came 82] R. J. Cameron. “Fast generation of Chebyshev filter prototypes
with asymmetrically-prescribed transmission zeros”. ESA Journal,
Vol. 6, pp. 83–95, 1982.
[Came 99] R. J. Cameron. “General coupling matrix synthesis methods for
Chebyshev filtering functions”. Microwave Theory and Techniques,
IEEE Transactions on, Vol. 47, No. 4, pp. 433–442, 1999.
[Chem 14a] K. Chemmangat, F. Ferranti, T. Dhaene, and L. Knockaert. “Para-
metric macromodelling of linear high-frequency systems using mul-
tiple frequency scaling and sequential sampling”. Electronics Let-
ters, Vol. 50, No. 6, pp. 475–476, 2014.
[Chem 14b] K. Chemmangat, F. Ferranti, T. Dhaene, and L. Knockaert. “Scal-
able models of microwave system responses using sequential sam-
pling on unstructured grids”. International Journal of Numerical
Modelling: Electronic Networks, Devices and Fields, Vol. 27, No. 1,
pp. 122–137, 2014.
[Cohn 58] S. B. Cohn. “Parallel-coupled transmission-line-resonator filters”.
IRE Transactions on Microwave Theory and Techniques, Vol. 6,
No. 2, pp. 223–231, 1958.
[Couc 10] I. Couckuyt, F. Declercq, T. Dhaene, H. Rogier, and L. Knock-
aert. “Surrogate-based infill optimization applied to electromag-
netic problems”. International Journal of RF and Microwave
Computer-Aided Engineering, Vol. 20, No. 5, pp. 492–501, 2010.
[Couc 12] I. Couckuyt, D. Deschrijver, and T. Dhaene. “Towards efficient
multiobjective optimization: multiobjective statistical criterions”.
In: 2012 IEEE Congress on Evolutionary Computation, pp. 1–8,
IEEE, Brisbane, QLD, Australia, 10-15 June 2012.
218
[Cris 72] E. Cristal and S. Frankel. “Hairpin-line and hybrid hairpin-
line/half-wave parallel-coupled-line filters”. IEEE Transactions on
Microwave Theory and Techniques, Vol. 20, No. 11, pp. 719–728,
1972.
[CST 15] “CST Microwave Studio”. www.cst.com, 2015.
[Cuyt 06] A. Cuyt, R. Lenin, S. Becuwe, and B. Verdonk. “Adaptive multi-
variate rational data fitting with applications in electromagnetics”.
IEEE Transactions on Microwave Theory and Techniques,, Vol. 54,
No. 5, pp. 2265 – 2274, May 2006.
[Denl 80] E. J. Denlinger. “Losses of microstrip lines”. IEEE Transactions
on Microwave Theory Techniques, Vol. 28, pp. 513–522, 1980.
[Deva 03] V. Devabhaktuni, B. Chattaraj, M. Yagoub, and Q.-J. Zhang. “Ad-
vanced microwave modeling framework exploiting automatic model
generation, knowledge neural networks, and space mapping”. IEEE
Transactions on Microwave Theory and Techniques,, Vol. 51, No. 7,
pp. 1822 – 1833, July 2003.
[Ferr 09] F. Ferranti, L. Knockaert, and T. Dhaene. “Parameterized S-
Parameter Based Macromodeling With Guaranteed Passivity”.
IEEE Microwave and Wireless Component Letters, Vol. 19, No. 10,
pp. 608–610, Oct. 2009.
[Ferr 10] F. Ferranti, L. Knockaert, and T. Dhaene. “Guaranteed Passive
Parameterized Admittance-Based Macromodeling”. IEEE Trans-
actions on Advanced Packaging, Vol. 33, No. 3, pp. 623–629, Aug.
2010.
[Ferr 11] F. Ferranti, L. Knockaert, and T. Dhaene. “Passivity-Preserving
Parametric Macromodeling by Means of Scaled and Shifted State-
Space Systems”. IEEE Transactions on Microwave Theory and
Techniques, Vol. 59, No. 10, pp. 2394 –2403, Oct. 2011.
[Ferr 12] F. Ferranti, L. Knockaert, T. Dhaene, and G. Antonini. “Parametric
macromodeling based on amplitude and frequency scaled systems
with guaranteed passivity”. International Journal of Numerical
Modelling: Electronic Networks, Devices and Fields, Vol. 25, No. 2,
pp. 139 –151, March/April 2012.
219
[Fook 90] E. H. Fooks and R. A. Zakarevicius. Microwave engineering using
microstrip circuits. Prentice-Hall, Inc., 1990.
[Garc 04] A. Garcıa-Lamperez, S. Llorente-Romano, M. Salazar-Palma, and
T. K. Sarkar. “Efficient electromagnetic optimization of microwave
filters and multiplexers using rational models”. IEEE Transactions
on Microwave Theory and Techniques, Vol. 52, No. 2, pp. 508–521,
2004.
[Garg 79] R. Garg and I. Bahl. “Characteristics of coupled microstriplines”.
IEEE Transactions on Microwave Theory and Techniques, Vol. 27,
No. 7, pp. 700–705, 1979.
[Gilb 63] E. G. Gilbert. “Controllability and observability in multivariable
control systems”. Journal of the Society for Industrial and Applied
Mathematics, Series A: Control, Vol. 1, No. 2, pp. 128–151, 1963.
[Gopi 81] A. Gopinath. “Maximum Q-factor of microstrip resonators”. IEEE
Transactions on Microwave Theory and Techniques, Vol. 29, No. 2,
pp. 128–131, 1981.
[Gupt 79] K. Gupta, R. Garg, I. Bahl, and P. Bhartia. Microstrip lines and
slotlines. Vol. 2, Artech house Dedham, Massachusetts, 1979.
[Gust 06] B. Gustavsen. “Improving the pole relocating properties of vector
fitting”. IEEE Transactions on Power Delivery, Vol. 21, No. 3,
pp. 1587–1592, July 2006.
[Gust 99] B. Gustavsen and A. Semlyen. “Rational approximation of fre-
quency domain responses by Vector Fitting”. IEEE Transactions
on Power Delivery, Vol. 14, No. 3, pp. 1052–1061, July 1999.
[Hamm 80] E. Hammerstad and O. Jensen. “Accurate models for microstrip
computer-aided design”. In: 1980 IEEE MTT-S International Mi-
crowave Symposium Digest, pp. 407–409, Washington, DC, USA,
28-30 May 1980.
[Harr 96] R. F. Harrington and J. L. Harrington. Field computation by mo-
ment methods. Oxford University Press, 1996.
[Hars 01] P. Harscher, R. Vahldieck, and S. Amari. “Automated filter tuning
using generalized low-pass prototype networks and gradient-based
parameter extraction”. IEEE Transactions on Microwave Theory
and Techniques, Vol. 49, No. 12, pp. 2532–2538, 2001.
220

[Hars 02] P. Harscher, E. Ofli, R. Vahldieck, and S. Arnari. “EM-simulator
based parameter extraction and optimization technique for mi-
crowave and millimeter wave filters”. In: Microwave Symposium
Digest, 2002 IEEE MTT-S International, pp. 1113–1116, IEEE,
Seattle, WA, USA, 2-7 June 2002.
[Hong 00] J.-S. Hong. “Couplings of asynchronously tuned coupled microwave
resonators”. IEE Proceedings: Microwaves, Antennas and Propa-
gation, Vol. 147, No. 5, pp. 354–358, 2000.
[Hong 01] J.-S. Hong and M. J. Lancaster. Microstrip filters for RF/microwave
applications. Vol. 126, Wiley-interscience, 2001.
[Hong 96] J.-S. Hong and M. J. Lancaster. “Couplings of microstrip square
open-loop resonators for cross-coupled planar microwave filters”.
IEEE Transactions on Microwave Theory and Techniques, Vol. 44,
No. 11, pp. 2099–2109, 1996.
[Hong 99] J.-S. Hong and M. Lancaster. “Microstrip cross-coupled trisec-
tion bandpass filters with asymmetric frequency characteristics”.
IEE Proceedings: Microwaves, Antennas and Propagation, Vol. 146,
No. 1, pp. 84–90, 1999.
[Hsu 13] C.-Y. Hsu, C.-Y. Chen, and H.-R. Chuang. “Microstrip dual-band
bandpass filter design with closely specified passbands”. Microwave
Theory and Techniques, IEEE Transactions on, Vol. 61, No. 1,
pp. 98–106, 2013.
[Hu 13] H. Hu and K.-L. Wu. “An adaptive computer-aided design-and-
tuning scheme for a predistorted filter with uneven-Q effect”. In:
Microwave Symposium Digest (IMS), 2013 IEEE MTT-S Interna-
tional, pp. 1–3, IEEE, Seattle, WA, USA, 2-7 June 2013.
[Hu 14] H. Hu and K.-L. Wu. “A Generalized Coupling Matrix Extraction
Technique for Bandpass Filters With Uneven-Qs”. IEEE Transac-
tions on Microwave Theory and Techniques, Vol. 62, No. 2, pp. 244–
251, Feb 2014.
[Kail 80] T. Kailath. Linear systems. Vol. 156, Prentice-Hall Englewood
Cliffs, NJ, 1980.
[Kirs 84] M. Kirschning and R. H. Jansen. “Accurate wide-range design equa-
tions for the frequency-dependent characteristic of parallel coupled
221
microstrip lines”. IEEE Transactions on Microwave Theory and
Techniques, Vol. 32, No. 1, pp. 83–90, 1984.
[Klei 08] J. P. C. Kleijnen. Design and Analysis of Simulation Experiments.
Springer, 2008.
[Klim 05] A. Klimke and B. Wohlmuth. “Algorithm 847: spinterp: Piecewise
Multilinear Hierarchical Sparse Grid Interpolation in MATLAB”.
ACM Transactions on Mathematical Software, Vol. 31, No. 4, 2005.
[Klim 07] A. Klimke. “Sparse Grid Interpolation Toolbox – User’s Guide”.
Tech. Rep. IANS report 2007/017, University of Stuttgart, 2007.
[Koza 02] P. Kozakowski and M. Mrozowski. “Automated CAD of coupled
resonator filters”. IEEE Microwave and Wireless Components Let-
ters, Vol. 12, No. 12, pp. 470–472, 2002.
[Koza 06] P. Kozakowski and M. Mrozowski. “Quadratic programming ap-
proach to coupled resonator filter CAD”. IEEE Transactions on
Microwave Theory and Techniques, Vol. 54, No. 11, pp. 3906–3913,
2006.
[Kozi 06] S. Koziel, J. Bandler, and K. Madsen. “A Space-Mapping Frame-
work for Engineering Optimization; Theory and Implementation”.
IEEE Transactions on Microwave Theory and Techniques,, Vol. 54,
No. 10, pp. 3721 –3730, Oct. 2006.
[Kozi 10a] S. Koziel. “Shape-Preserving Response Prediction for Microwave
Design Optimization”. IEEE Transactions on Microwave Theory
and Techniques,, Vol. 58, No. 11, pp. 2829 –2837, Nov. 2010.
[Kozi 10b] S. Koziel, J. Bandler, and Q. Cheng. “Robust Trust-Region Space-
Mapping Algorithms for Microwave Design Optimization”. IEEE
Transactions on Microwave Theory and Techniques,, Vol. 58, No. 8,
pp. 2166 –2174, Aug. 2010.
[Kuds 92] C. Kudsia, R. Cameron, and T. Wai-Cheung. “Innovations in mi-
crowave filters and multiplexing networks for communications satel-
lite systems”. IEEE Transactions on Microwave Theory and Tech-
niques, Vol. 40, No. 6, pp. 1133–1149, 1992.
[Kuro 65] K. Kurokawa. “Power waves and the scattering matrix”. IEEE
Transactions on Microwave Theory and Techniques, Vol. 13, No. 2,
pp. 194–202, 1965.
222

[Lame 03] A. Lamecki, P. Kozakowski, and M. Mrozowski. “Efficient imple-
mentation of the Cauchy method for automated CAD-model con-
struction”. IEEE Microwave and Wireless Components Letters,,
Vol. 13, No. 7, pp. 268 –270, July 2003.
[Lame 09] A. Lamecki, L. Balewski, and M. Mrozowski. “Adaptive CAD-
Model Construction Schemes”. IEEE Transactions on Magnetics,,
Vol. 45, No. 3, pp. 1538 –1541, March 2009.
[Lamp 04] A. G. Lamperez, T. K. Sarkar, and M. S. Palma. “Generation of ac-
curate rational models of lossy systems using the Cauchy method”.
IEEE Microwave and Wireless Components Letters, Vol. 14, No. 10,
pp. 490–492, 2004.
[Lehm 01] R. Lehmensiek and P. Meyer. “Creating accurate multivariate ra-
tional interpolation models of microwave circuits by using efficient
adaptive sampling to minimize the number of computational elec-
tromagnetic analyses”. IEEE Transactions on Microwave Theory
and Techniques, Vol. 49, No. 8, pp. 1419 –1430, Aug. 2001.
[Levy 02] R. Levy, R. V. Snyder, and G. Matthaei. “Design of microwave
filters”. IEEE Transactions on Microwave Theory and Techniques,
Vol. 50, No. 3, pp. 783–793, 2002.
[Levy 84] R. Levy and S. B. Cohn. “A history of microwave filter research, de-
sign, and development”. IEEE Transactions on Microwave Theory
and Techniques, Vol. 32, No. 9, pp. 1055–1067, 1984.
[Macc 08] G. Macchiarella. “Generalized coupling coefficient for filters with
nonresonant nodes”. IEEE Microwave and Wireless Components
Letters, Vol. 18, No. 12, pp. 773–775, 2008.
[Macc 10] G. Macchiarella. “Extraction of unloaded Q and coupling matrix
from measurements on filters with large losses”. Microwave and
Wireless Components Letters, IEEE, Vol. 20, No. 6, pp. 307–309,
2010.
[Mark 92] R. B. Marks and D. F. Williams. “A general waveguide circuit
theory”. Journal of Research-National Institute of Standards and
Technology, Vol. 97, pp. 533–533, 1992.
[Marm 02] J.-P. Marmorat, M. Olivi, B. Hanzon, and R. L. Peeters. “Matrix
rational H 2 approximation: a state-space approach using Schur
223

parameters”. In: Proceedings of the 41st IEEE Conference on Deci-
sion and Control, pp. 4244–4249, IEEE, Las Vegas, NV, USA, 10-13
Dec. 2002.
[Mart 12] M. Martinez-Mendoza, F. Seyfert, C. Ernst, and A. Alvarez-Melcon.
“Formal Expression of Sensitivity and Energy Relationship in the
Context of the Coupling Matrix”. IEEE Transactions on Microwave
Theory and Techniques, Vol. 60, No. 11, pp. 3369–3375, 2012.
[Matt 64] G. L. Matthaei, L. Young, and E. Jones. Microwave filters,
impedance-matching networks, and coupling structures. Vol. 5,
McGraw-Hill New York, 1964.
[Mira 08] V. Miraftab and M. Yu. “Generalized lossy microwave filter cou-
pling matrix synthesis and design using mixed technologies”. IEEE
Transactions on Microwave Theory and Techniques, Vol. 56, No. 12,
pp. 3016–3027, 2008.
[Mont 48] C. G. Montgomery, R. H. Dicke, and E. M. Purcell. Principles of
microwave circuits. Iet, 1948.
[Oliv 13] M. Olivi, F. Seyfert, and J.-P. Marmorat. “Identification of mi-
crowave filters by analytic and rational H2 approximation”. Auto-
matica, Vol. 49, No. 2, pp. 317–325, 2013.
[Part 97] J. R. Partington. Interpolation, identification, and sampling. Ox-
ford University Press, 1997.
[Peik 98] S. Peik, R. Mansour, and Y. Chow. “Multidimensional Cauchy
method and adaptive sampling for an accurate microwave circuit
modeling”. IEEE Transactions on Microwave Theory and Tech-
niques,, Vol. 46, No. 12, pp. 2364 –2371, Dec. 1998.
[Pint 12] R. Pintelon and J. Schoukens. System Identification: A Frequency
Domain Approach. Wiley-IEEE Press, 2012.
[Poza 98] D. Pozar. Microwave engineering. John Wiley & Sons, 1998.
[Puce 68] R. A. Pucel, D. J. Masse, and C. P. Hartwig. “Losses in microstrip”.
IEEE Transactions on Microwave Theory and Techniques, Vol. 16,
No. 6, pp. 342–350, 1968.
224

[Pugl 00] K. Puglia. “A General Design Procedure for Bandpass Filters De-
rived from Lowpass Prototype Elements: Part I”. Microwave Jour-
nal -Euroglobal Edition-, Vol. 43, No. 12, pp. 22–38, 2000.
[Pugl 01] K. Puglia. “A general design procedure for bandpass filters derived
from low pass prototype elements: Part II”. Microwave Journal
-Euroglobal Edition-, Vol. 44, No. 1, pp. 114–137, 2001.
[RARL] “RARL2: a Matlab toolbox dedicated to the computa-
tion of a stable rational L2-approximation of specified order
to a given L2-stable matrix-valued function”. http://www-
sop.inria.fr/apics/RARL2/rarl2.html.
[Seyf 00] F. Seyfert. “DEDALE-HF: a Matlab toolbox dedicated to the
equivalent network synthesis for microwave filters”. http://www-
sop.inria.fr/apics/Dedale/, 2000.
[Seyf 03] F. Seyfert, L. Baratchart, J.-P. Marmorat, S. Bila, J. Sombrin, et
al. “Extraction of coupling parameters for microwave filters: De-
termination of a stable rational model from scattering data”. In:
IEEE MTT-S International Microwave Symposium Digest, pp. 25–
30, Citeseer, 2003.
[Seyf 04] F. Seyfert. “PRESTO-HF: a Matlab toolbox dedicated to the iden-
tification problem of low pass coupling parameters of band pass
microwave filters”. https://project.inria.fr/presto-hf/, 2004.
[Seyf 07] F. Seyfert and S. Bila. “General synthesis techniques for coupled
resonator networks”. IEEE Microwave Magazine, Vol. 8, No. 5,
pp. 98–104, Oct 2007.
[Seyf 98] F. Seyfert. Problemes extremaux dans les espaces de Hardy. PhD
thesis, Ecole Nationale Superieure des Mines de Paris, 1998.
[Snyd 07] R. V. Snyder. “Practical aspects of microwave filter development”.
IEEE Microwave Magazine, Vol. 8, No. 2, pp. 42–54, 2007.
[Swan 07a] D. Swanson and G. Macchiarella. “Microwave filter design by syn-
thesis and optimization”. IEEE Microwave Magazine, Vol. 8, No. 2,
pp. 55–69, 2007.
[Swan 07b] D. Swanson. “Narrow-band microwave filter design”. IEEE Mi-
crowave Magazine, Vol. 8, No. 5, pp. 105–114, 2007.
225

[Tami 05] S. Tamiazzo and G. Macchiarella. “An analytical technique for the
synthesis of cascaded N-tuplets cross-coupled resonators microwave
filters using matrix rotations”. IEEE Transactions on Microwave
Theory and Techniques, Vol. 53, No. 5, pp. 1693–1698, 2005.
[Triv 09] P. Triverio, S. Grivet-Talocia, and M. Nakhla. “A Parameter-
ized Macromodeling Strategy With Uniform Stability Test”. IEEE
Transactions on Advanced Packaging, Vol. 32, No. 1, pp. 205 –215,
Feb. 2009.
[Triv 10] P. Triverio, M. Nakhla, and S. Grivet-Talocia. “Passive parametric
macromodeling from sampled frequency data”. In: 2010 IEEE 14th
Workshop on Signal Propagation on Interconnects (SPI), pp. 117–
120, IEEE, Hildesheim, The Netherlands, 9-12 May 2010.
[Wang 07] G. G. Wang and S. Shan. “Review of Metamodeling Techniques in
Support of Engineering Design Optimization”. Journal of Mechan-
ical Design, Vol. 129, No. 4, pp. 370–380, 2007.
[Wong 79] J. S. Wong. “Microstrip tapped-line filter design”. IEEE Transac-
tions on Microwave Theory Techniques, Vol. 27, pp. 44–50, 1979.
[Yang 99] C.-C. Yang and C.-Y. Chang. “Microstrip cascade trisection filter”.
IEEE Microwave and Guided Wave Letters, Vol. 9, No. 7, pp. 271–
273, 1999.
226