minagawa m
TRANSCRIPT

Harmonious Systems Engineering Lab.
PID制御に基づく屋内飛行船ロボットの
飛行制御システムの開発
複合情報学専攻 複雑系工学講座
調和系工学研究室 修士二年 皆川 良弘
- Indoor Balloon Robot Control System based on PID controller -

Harmonious Systems Engineering Lab.
背景
Balloon
T-Engine System
CPU : M32104 (216 MHz)
SDRAM :16MB
Camera Sensor
160 ×144 [pixel]
x
y
z
Propellers
Input Signal Control Signal
Hardware Device
・高さ:80cm
・直径:94cm
位置の取得[Kadota,2004]:
速度の取得:
z(t),θ(t)x(t),y(t),
)(),(),(),( ttvztvytvx
x y
z θ
屋内飛行船ロボット
3m×3m

Harmonious Systems Engineering Lab.
目的
エンタテインメント飛行
目標位置への移動[Kawamura,2005]
回転しながら飛行
等速飛行
従来の飛行制御では困難
多様な飛行が実行可能な動作設計
動作設計に基づいた制御方法の構築
目的:屋内飛行船ロボットの飛行制御システムの開発

Harmonious Systems Engineering Lab.
動作設計
A
B
))(),(),(),(),(),(),(),(()( ttvztvytvxttztytxt S
飛行船ロボットの状態量:
飛行中の全状態量を
指定することは困難
三次元座標 角度 各軸の速度 角速度
Harmonious Systems Engineering Lab.
動作設計
A
B
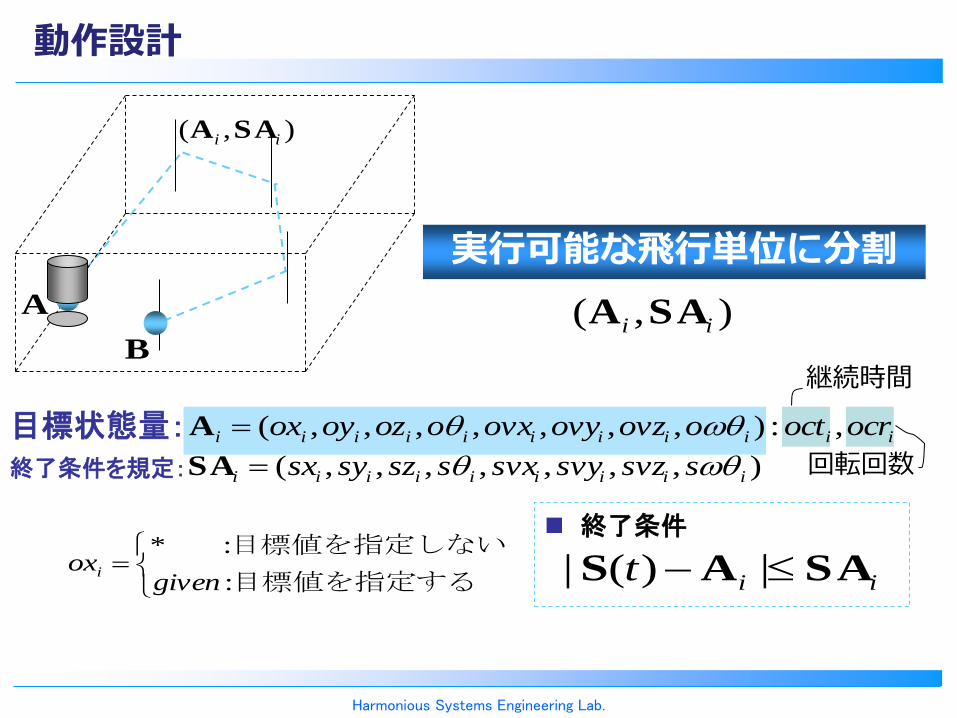
実行可能な飛行単位に分割
目標状態量: iiiiiiiiiii ocroctoovzovyovxoozoyox ,:),,,,,,,( A
終了条件を規定:
),( ii SAA
),,,,,,,( iiiiiiiii ssvzsvysvxsszsysx SA
終了条件
iit SAAS |)(|
目標値を指定する
目標値を指定しない
:
:*
givenoxi
),( ii SAA
継続時間
回転回数
Harmonious Systems Engineering Lab.
動作設計例
),*,*,*,*,*20,20,20(
*,*:,*,*,*,*)300,100,200(
1
1
SA
A
,*,*,*,*)8/,30,30,30(
*,*:,*,*,*,*)2/,200,300,200(
2
2
SA
A
,*,*)0.2,*,4/,30,*,30(
*,*:,*,*)0.10,*,,200,*,100(
3
3
SA
A
)03.0,*,*,*,*,20,10,10(:
,*30:)2.0,*,*,*,*,150,0,0(:
4
4
SA
A
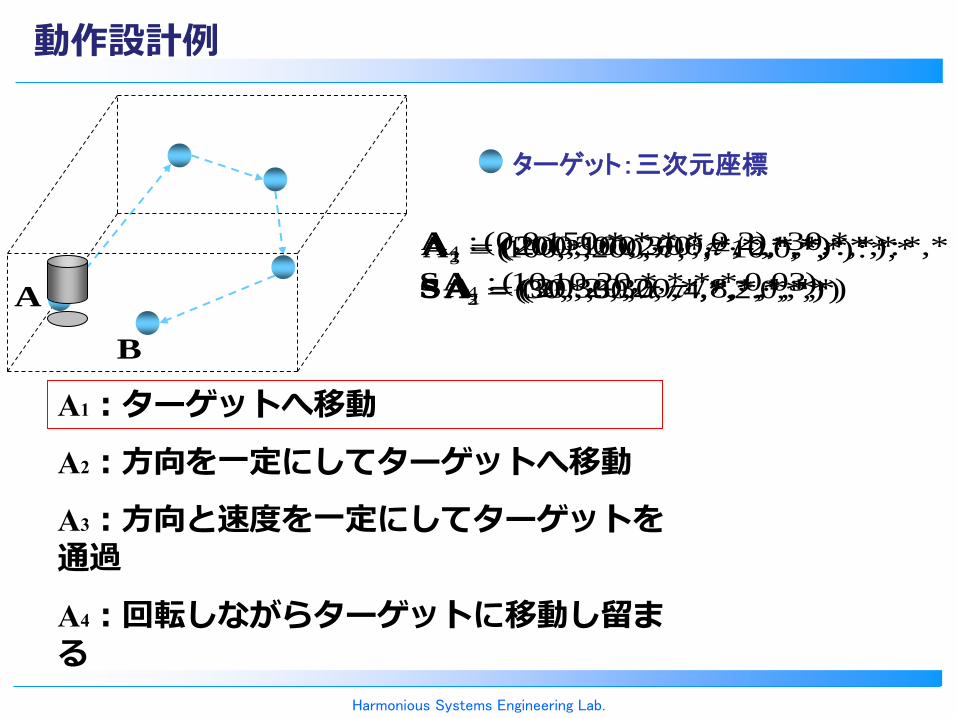
A1:ターゲットへ移動
A2:方向を一定にしてターゲットへ移動
A3:方向と速度を一定にしてターゲットを通過
A4:回転しながらターゲットに移動し留まる
A
B
ターゲット:三次元座標

Harmonious Systems Engineering Lab.
目標状態量への制御
制御軸-X軸、Y軸、Z軸、θ軸
),(
),(
),(
),(
ii
ii
ii
ii
oo
ovzoz
ovyoy
ovxox
α:比例定数
)(
)(
)(
)(
te
tevz
tevy
tevx
位置・速度の制御は
速度の制御に集約可能
X軸:
Y軸:
Z軸:
Θ軸:
目標速度
)),)((max(
))((
0.0
)(
iix
i
ix
ovxoxtx
ovx
oxtxtevx
givenovxgivenox
givenovxox
ovxgivenox
ovxox
ii
ii
ii
ii
,
*,
*,
**,
目標速度の計算:X軸

Harmonious Systems Engineering Lab.
Z
Y
PID制御
T
TtdtdKDtdKItdKPtm
T
TtdtdKDtdKItdKPtm
T
TtdtdKDtdKItdKPtm
T
TtdtdKDtdKItdKPtm
zzzzzzzz
yy
yyyyyy
xxxxxxxx
)()()()()(
)()()()()(
)()()()()(
)()()()()(
0.3[sec])(:
),()(:
:
サンプリング時間
目標速度との偏差
プロペラ推力
ΔT
tevtvd(t)
m(t)
飛行船ロボットの研究に広く利用 [Kawamura,2005],[鈴木,2006]
gainDerivative:
gainIntegral:
gainlPropotiona:
KD
KI
KP
X軸 :
Y軸 :
Z軸 :
Θ軸 :
)()()(
)()()(
3
1
tmtmtm
tmtmtm
y
y
)()()(
)()()(
4
2
tmtmtm
tmtmtm
x
x
プロペラ出力
)()(
)()(
6
5
tmtm
tmtm
z
z
X
Y
x y 1
2
3
4
5 6

Harmonious Systems Engineering Lab.
実験
飛行単位として考えられるパターンを網羅
ベンチマーク
P1
P2
P3 P4
P6
P5
ベンチマークを基にした性能評価
PID制御のパラメータチューニング
チューニング後のパラメータによる実験結果
)XYZ,YZ,XZ,XY( 平面平面平面平面
),,( 一定角速度一定角度指定なし
)302,301( 秒間保持高さ秒間保持高さ
直線移動:
回転:
定位置保持:
Harmonious Systems Engineering Lab.
結果
T
t
tt1
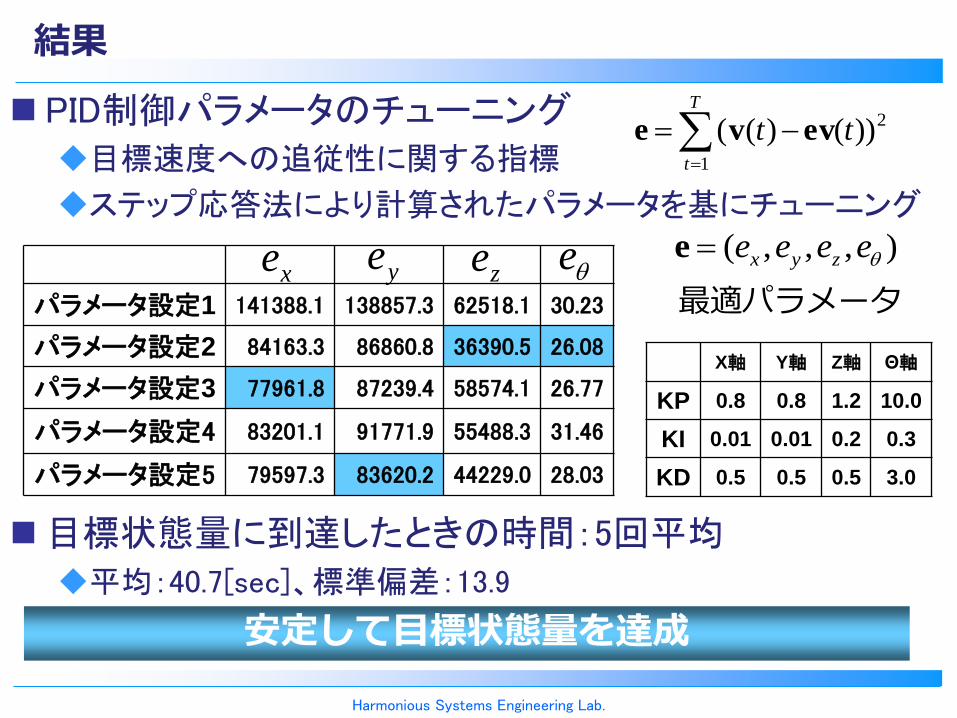
2))()(( evve
),,,( eeee zyxe
パラメータ設定1 141388.1 138857.3 62518.1 30.23
パラメータ設定2 84163.3 86860.8 36390.5 26.08
パラメータ設定3 77961.8 87239.4 58574.1 26.77
パラメータ設定4 83201.1 91771.9 55488.3 31.46
パラメータ設定5 79597.3 83620.2 44229.0 28.03
xe yeze e
PID制御パラメータのチューニング
目標速度への追従性に関する指標
ステップ応答法により計算されたパラメータを基にチューニング
X軸 Y軸 Z軸 Θ軸
KP 0.8 0.8 1.2 10.0
KI 0.01 0.01 0.2 0.3
KD 0.5 0.5 0.5 3.0
最適パラメータ
目標状態量に到達したときの時間:5回平均
平均:40.7[sec]、標準偏差:13.9
安定して目標状態量を達成

Harmonious Systems Engineering Lab.
結果
三次元移動軌跡
XY平面の移動軌跡 Θの時間推移
(20倍速)
飛行制御システムの完成

Harmonious Systems Engineering Lab.
結論
屋内飛行船ロボットの飛行制御システムを開発した
目標状態量を指定し多様な飛行が実行可能
目標状態量に到達するために、目標速度に追従するPID制御を利用
エンタテインメント飛行を実現する飛行制御システム
目標位置への移動だけでなく、回転しながらの飛行、等速飛行が可能

Harmonious Systems Engineering Lab.
デモンストレーション

Harmonious Systems Engineering Lab.
デモンストレーション