mekanisme robot - 3 sks (robot mechanism) · 02/10/2016 3 mekanisme robot (robot mechanisms) by...
TRANSCRIPT

02/10/2016
1
Mekanisme Robot - 3 SKS
(Robot Mechanism)
Latifah Nurahmi, PhD
!! [email protected] !!
First Term - 2016/2017
C.250
Mekanisme Robot (Robot Mechanisms) by Latifah Nurahmi 2
Serial manipulators
n-dof serial manipulators:• Base link• n moving links• Open loop
02/10/2016
2
Mekanisme Robot (Robot Mechanisms) by Latifah Nurahmi 3
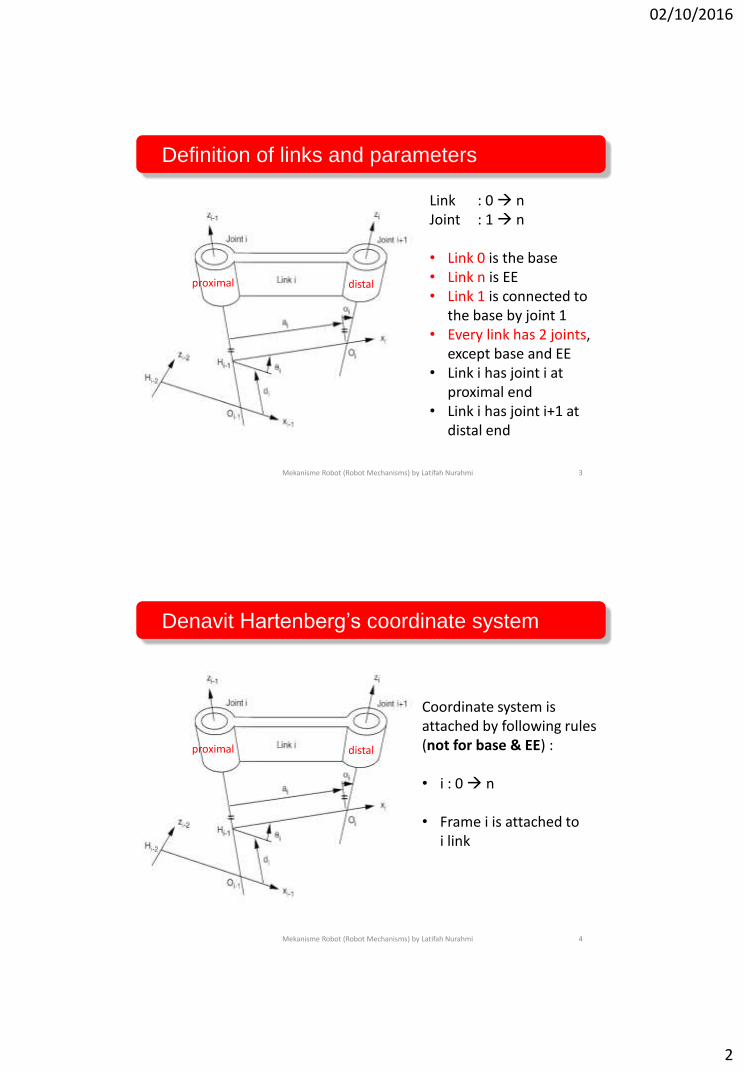
Definition of links and parameters
Link : 0 nJoint : 1 n
• Link 0 is the base• Link n is EE• Link 1 is connected to
the base by joint 1• Every link has 2 joints,
except base and EE• Link i has joint i at
proximal end• Link i has joint i+1 at
distal end
proximal distal
Mekanisme Robot (Robot Mechanisms) by Latifah Nurahmi 4
Denavit Hartenberg’s coordinate system
Coordinate system isattached by following rules(not for base & EE) :
• i : 0 n
• Frame i is attached to i link
proximal distal
02/10/2016
3
Mekanisme Robot (Robot Mechanisms) by Latifah Nurahmi 5
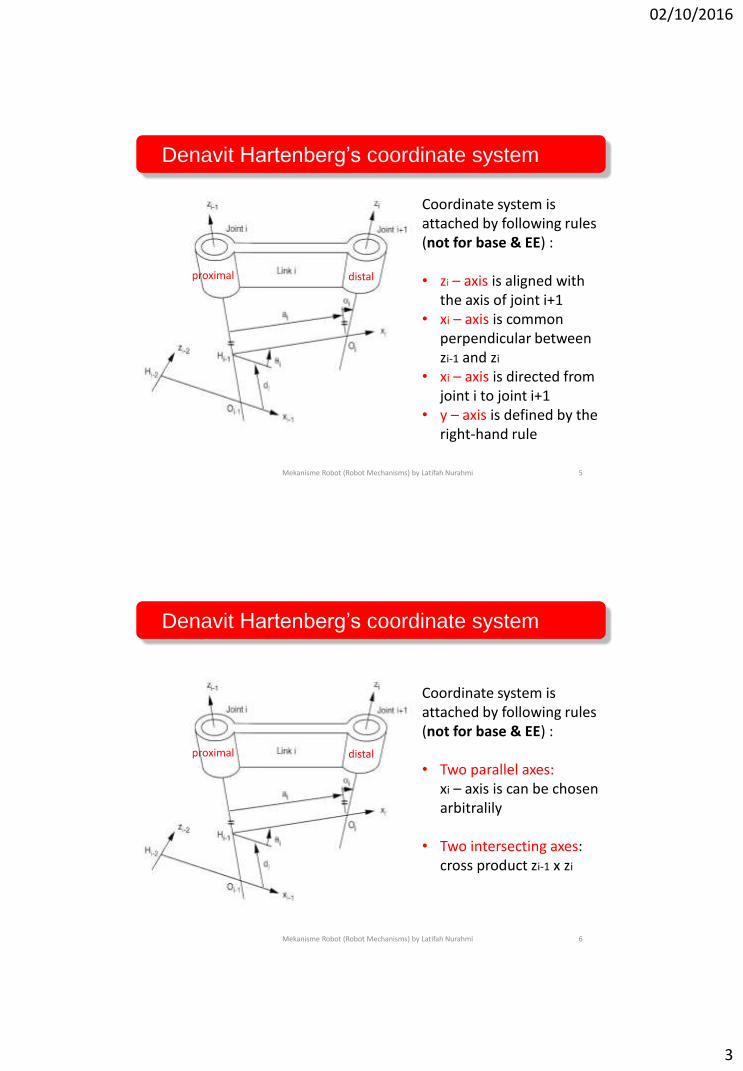
Denavit Hartenberg’s coordinate system
Coordinate system isattached by following rules(not for base & EE) :
• zi – axis is aligned withthe axis of joint i+1
• xi – axis is commonperpendicular betweenzi-1 and zi
• xi – axis is directed fromjoint i to joint i+1
• y – axis is defined by the right-hand rule
proximal distal
Mekanisme Robot (Robot Mechanisms) by Latifah Nurahmi 6
Denavit Hartenberg’s coordinate system
Coordinate system isattached by following rules(not for base & EE) :
• Two parallel axes:xi – axis is can be chosenarbitralily
• Two intersecting axes:cross product zi-1 x zi
proximal distal

02/10/2016
4
Mekanisme Robot (Robot Mechanisms) by Latifah Nurahmi 7
Denavit Hartenberg’s coordinate system
• 0 – coordinate is at the base
• z0 – axis is alligned withthe 1st joint
• n – coordinate isattached at EE
• xn – axis is normal to the last joint axis (n-1)
proximal distal
Mekanisme Robot (Robot Mechanisms) by Latifah Nurahmi 8
Denavit Hartenberg’s coordinate system

02/10/2016
5
Mekanisme Robot (Robot Mechanisms) by Latifah Nurahmi 9
Denavit Hartenberg’s parameters
• Hi-1 : intersection point between xi and zi-1
proximal distal• Oi-1 : origin of i-1th
coordinate system
• ai : distance between twoadjacent joint axes
• di : distance between twonormals of a joint axis
Mekanisme Robot (Robot Mechanisms) by Latifah Nurahmi 10
Denavit Hartenberg’s parameters
proximal distal
• θi : angle to rotatexi-1 – axis into xi – axis about zi-1 – axis
• αi : angle to rotatezi-1 – axis into zi – axis about xi – axis

02/10/2016
6
Mekanisme Robot (Robot Mechanisms) by Latifah Nurahmi 11
Denavit Hartenberg’s parameters
proximal distal
R-joint : • ai, αi, di constant • θi variable
P-joint : • ai, αi, θi constant • di variable
Mekanisme Robot (Robot Mechanisms) by Latifah Nurahmi 12
Denavit Hartenberg’s transformation matrix
Due to di along z-direction: 𝑇(𝑧, 𝑑) =
1 00 1
0 00 0
0 00 0
1 𝑑𝑖0 1
Due to θi about z-axis: 𝑇(𝑧, 𝜃) =
𝑐𝜃𝑖 −𝑠𝜃𝑖𝑠𝜃𝑖 𝑐𝜃𝑖
0 00 0
0 00 0
1 00 1

02/10/2016
7
Mekanisme Robot (Robot Mechanisms) by Latifah Nurahmi 13
Denavit Hartenberg’s transformation matrix
Due to ai along x-direction: 𝑇(𝑥, 𝑎) =
1 00 1
0 𝑎𝑖0 0
0 00 0
1 00 1
Due to αi about x-axis: 𝑇(𝑥, 𝛼) =
1 00 𝑐𝛼𝑖
0 0−𝑠𝛼𝑖 0
0 𝑠𝛼𝑖0 0
𝑐𝛼𝑖 00 1
Mekanisme Robot (Robot Mechanisms) by Latifah Nurahmi 14
Denavit Hartenberg’s transformation matrix
The transformation from EE to the base is:
𝑇𝑖𝑖−1 = 𝑇 𝑧, 𝑑𝑖 𝑇 𝑧, 𝜃𝑖 𝑇 𝑥, 𝑎𝑖 𝑇(𝑥, 𝛼𝑖)

02/10/2016
8
Mekanisme Robot (Robot Mechanisms) by Latifah Nurahmi 15
Denavit Hartenberg’s procedure
Define the DH-parameters!
Articulated robot 3-dof
Mekanisme Robot (Robot Mechanisms) by Latifah Nurahmi 16
Denavit Hartenberg’s procedure
1. Number the links and the joints, starting from the base to EE:• Link : 0 3• Joint : 1 3• The base is link 0 • EE is link 3Link 0
Link 1
Link 2
Link 3 Joint 1
Joint 2
Joint 3

02/10/2016
9
Mekanisme Robot (Robot Mechanisms) by Latifah Nurahmi 17
Denavit Hartenberg’s procedure
2. Define z0-axis, it is alignedwith the 1st joint axis
3. Define zi-axis, it is alignedwith joint i+1
4. Define xi-axis as commonnormal between i to i+1 joint axes
5. Because the joint axes are parallel, xi can be definedarbitrarily
Mekanisme Robot (Robot Mechanisms) by Latifah Nurahmi 18
Denavit Hartenberg’s procedure
2. Define z0-axis, it is alignedwith the 1st joint axis
3. Define zi-axis, it is alignedwith joint i+1
4. Define xi-axis as commonnormal between i to i+1 joint axes
5. Because the joint axes are parallel, xi can be definedarbitrarily
6. Define the parameters!

02/10/2016
10
Mekanisme Robot (Robot Mechanisms) by Latifah Nurahmi 19
Denavit Hartenberg’s procedure
Mekanisme Robot (Robot Mechanisms) by Latifah Nurahmi 20
Denavit Hartenberg’s procedure
Subtitute to the transformation matrix:
Mutliply the transformation matrices:
𝐴30 = 𝐴1
0 𝐴21 𝐴3
2

02/10/2016
11
Mekanisme Robot (Robot Mechanisms) by Latifah Nurahmi 21
Assignment 1
Find the DH-parameters of SCARA Robot !
Mekanisme Robot (Robot Mechanisms) by Latifah Nurahmi 22
Assignment 1
Let’s see the structures !
02/10/2016
12
Mekanisme Robot (Robot Mechanisms) by Latifah Nurahmi 23
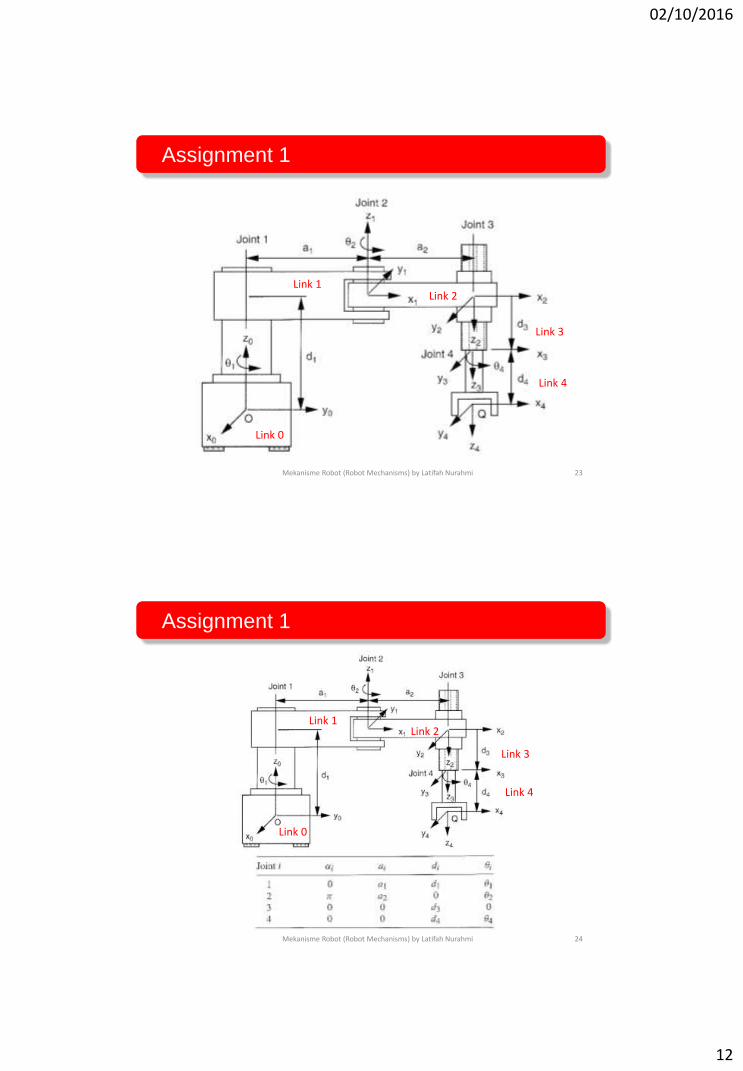
Assignment 1
Link 0
Link 1Link 2
Link 3
Link 4
Mekanisme Robot (Robot Mechanisms) by Latifah Nurahmi 24
Assignment 1
Link 0
Link 1Link 2
Link 3
Link 4

02/10/2016
13
Mekanisme Robot (Robot Mechanisms) by Latifah Nurahmi 25
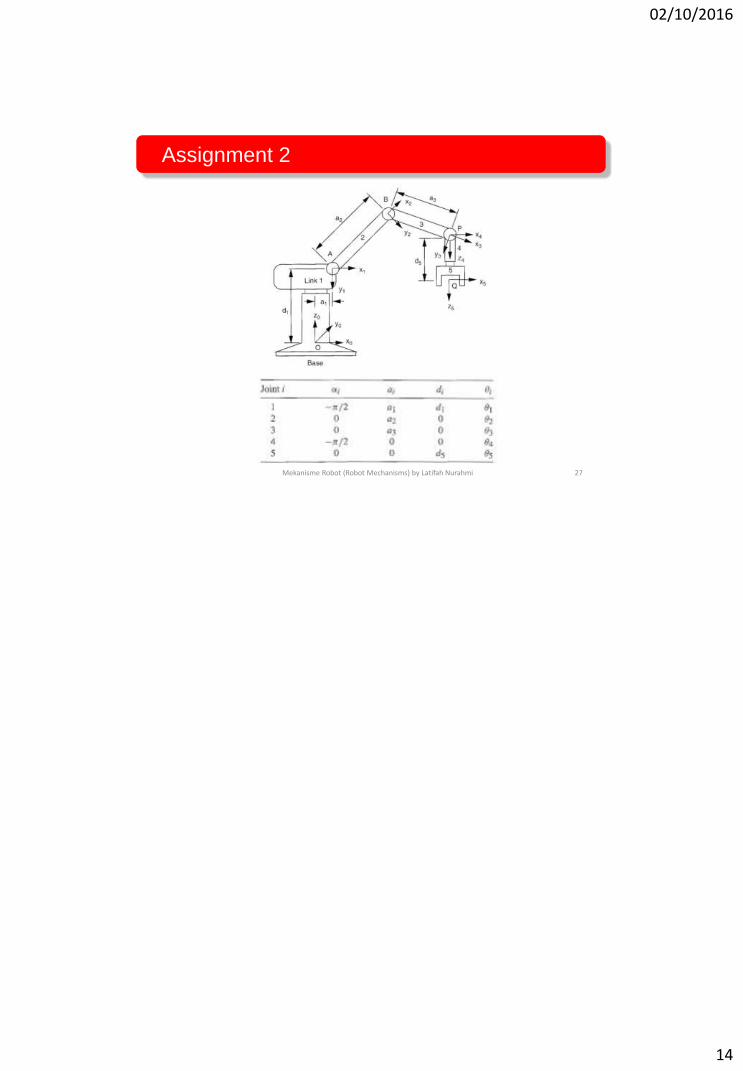
Assignment 2
Find the DH-parameters of Scorbot !
Mekanisme Robot (Robot Mechanisms) by Latifah Nurahmi 26
Assignment 2
02/10/2016
14
Mekanisme Robot (Robot Mechanisms) by Latifah Nurahmi 27
Assignment 2