mehrkanalige messung von impulsantworten - … · mehrkanalige messung von impulsantworten...
TRANSCRIPT

Mehrkanalige Messung von Impulsantworten
Projektarbeit
durchgeführt von
Luka Mikula
Institut für Breitbandkommunikation der Technischen Universität Graz
Leiter: Univ.-Prof. Dipl.-Ing. Dr. Gernot Kubin
Begutachter / Betreuer: Ao. Univ.-Prof. Dipl.-Ing. Dr. Gerhard Graber Dipl.-Ing. Dr. Werner Weselak
Graz, im Oktober 2007

Projektarbeit Mehrkanalige Messung von Impulsantworten
Institut für Breitbandkommunikation 2
Zusammenfassung
In der vorliegenden Projektarbeit wurde ein MATLAB-Tool mit Graphical User Interface (GUI) implementiert, mit der eine bis zu achtkanalige selbstständige Messung von Impulsantworten möglich ist.
Eine Impulsantwort bzw. ein Frequenzgang charakterisiert vollständig ein vorhandenes physikalisches System und wird sowohl in einigen Bereichen der Akustik (Raum-, Elektroakustik) als auch in der Signalverarbeitung und der Elektrotechnik verwendet.
Da ein idealer Impuls praktisch nicht realisierbar ist und ein realer Impuls einige Nachteile wie geringes Signal-Rausch-Verhältnis besitzt, können als Anregungssignale zwei verschiedene Sweep-Arten bzw. eine MLS-Folge verwendet werden.
Es können bis zu 8 Systemantworten gleichzeitig gemessen werden, aus denen die jeweils entsprechenden Impulsantworten berechnet und angezeigt werden.
Abstract
In this project thesis a MATLAB-Tool with a Graphical User Interface (GUI) for independent measuring of impulse responses is implemented.
An impulse response and the corresponding frequency response characterise an existing physical system. It is widely used in parts of acoustics (room- and electro-acoustics) as well as in signal processing and electrical engineering.
Because an ideal impulse is impossible to realise and actual impulses have drawbacks like a low signal-to-noise ratio, two different types of sweeps and a MLS sequence are used as excitation signals.
This tool allows the user to simultaneously measure 8 system responses, from which the corresponding impulse responses are computed and displayed.

Projektarbeit Mehrkanalige Messung von Impulsantworten
Institut für Breitbandkommunikation 3
Inhaltsverzeichnis
1 Überblick 4
1.1 Signalgeneration............................................................................................................... 5
1.2 Messung ........................................................................................................................... 8
2 Theorie 10
2.1 Anregungssignale........................................................................................................... 10 2.1.1 Impuls…................................................................................................................ 10 2.1.2 Sweeps................................................................................................................... 11 2.1.3 MLS-Folgen .......................................................................................................... 15
2.2 Impulsantwort ................................................................................................................ 17
3 Implementierung 19
3.1 Anregungssignale........................................................................................................... 19 3.1.1 Linearer Sweep...................................................................................................... 19 3.1.2 Logarithmischer Sweep......................................................................................... 20 3.1.3 MLS-Folge ............................................................................................................ 21
3.2 Darstellung der Spektren................................................................................................ 22 3.2.1 Spektrale Energiedichte (ESD) ............................................................................. 22 3.2.2 Spektrale Leistungsdichte (PSD) .......................................................................... 26
3.3 Kalibrierung der Messkette ............................................................................................ 28
3.4 Berechnung der Impulsantwort ...................................................................................... 29 3.4.1 Messung mit Sweeps ............................................................................................. 29 3.4.2 Messung mit MLS-Folgen..................................................................................... 32
3.5 Speichern und Laden...................................................................................................... 33 3.5.1 Anregungssignale .................................................................................................. 33 3.5.2 Messergebnisse...................................................................................................... 34
4 Durchführung einer Messung 38
4.1 Signalgeneration............................................................................................................. 39
4.2 Messung ......................................................................................................................... 41 4.2.1 Einstellungen......................................................................................................... 41 4.2.2 Kalibrierung .......................................................................................................... 42 4.2.3 Durchführung und Anzeige der Messung ............................................................. 44
5 Literaturverzeichnis 47
Projektarbeit Mehrkanalige Messung von Impulsantworten
Institut für Breitbandkommunikation 4
1 Überblick
In dieser Projektarbeit wurde ein MATLAB-Tool mit Graphical User Interface (GUI) implementiert, das bis zu 8-kanalige Messungen von Impulsantworten ermöglicht.
Das Tool besteht im Wesentlichen aus zwei Hauptteilen: einem Signalgenerator-Teil und einem Mess-Teil.
Im Signalgenerator-Teil können drei verschiedene Anregungssignale erzeugt, dargestellt, abgespielt, gespeichert und geladen werden: Lineare und logarithmische Sweeps sowie MLS-Folgen. Diese werden in der akustischen Messtechnik häufig verwendet, da sie sich im Praxisbetrieb bewährt haben. Ein großer Vorteil dieser Signale gegenüber einem reinen Impuls ist das stark verbesserte Signal-Rausch-Verhältnis (SNR), das heißt, dass man zur Anregung eines Systems den Einfluss von Rauschen klein halten kann, ohne das Signal extrem laut machen zu müssen. Nachteil dieser Anregung ist, dass man aus der Antwort des Systems die Impulsantwort bzw. den Frequenzgang, die ja das System charakterisieren und die als Antwort auf einen Impuls definiert sind, erst berechnen muss.
Diese Anregungssignale werden dann in den Mess-Teil des Programms geladen, wo die eigentliche Messung stattfindet. Zur Auswahl stehen ASIO- und WIN-Audiotreiber; mit ASIO sind bis zu 8-kanalige Messungen möglich, mit WIN 2-kanalige.
Vor der Messung muss noch eine Kalibrierung durchgeführt werden, damit die Messergebnisse richtig skaliert dargestellt werden können. Die Messergebnisse können wiederum dargestellt, gespeichert und geladen werden.
Zu den einzelnen GUI-Teilen kommt man über das Impulsantwortmodul-Hauptfenster.
Abb. 1.1: Impulsantwortmodul (Hauptfenster)

Projektarbeit Mehrkanalige Messung von Impulsantworten
Institut für Breitbandkommunikation 5
1.1 Signalgeneration
Bei Aufruf des Signalgenerator-GUIs aus dem Hauptfenster erscheint ein Fenster mit diversen Einstellmöglichkeiten auf der linken Seite und zunächst leeren Plots auf der rechten.
Abb. 1.2: Signalgenerator (Default)
Im Panel oben links kann zwischen den verschiedenen Anregungssignalen gewählt werden. Bei der Implementierung des Nichtlinearen Sweeps (durch Invertierung einer gemessenen Systemantwort sollte bei einer neuerlichen Messung die Systemantwort linearisiert werden) wurde ein Ansatz verfolgt, der sich für Messungen als nicht zielführend erwies, weshalb dieser nicht ausgewählt werden kann.
Im Panel unten links befinden sich Buttons zur Ausführung der Signalgeneration, worauf das gewählte Signal sowohl im Zeitbereich als auch im Frequenzbereich im rechten Panel dargestellt wird, sowie zum Abspielen und zum Speichern des gewählten Signals. Es besteht auch die Möglichkeit, ein in der Vergangenheit erstelltes und gespeichertes Signal zu laden. Bei Drücken des „Beenden“ - Buttons gelangt man zurück zum Hauptfenster. Das Abspielen des Signals wird in einem eigenen Teil-GUI implementiert, um dem Benutzer die Wahl des gewünschten Soundtreibers zum Abspielen zu ermöglichen.

Projektarbeit Mehrkanalige Messung von Impulsantworten
Institut für Breitbandkommunikation 6
Abb. 1.3: GUI zum Abspielen des Anregungssignals
Abhängig von der getroffenen Wahl werden Einstellparameter für dieses Signal sichtbar. Im Falle eines Sweep-Signals können die Abtastfrequenz, die Start- und Stopfrequenz, die Sweepdauer sowie der Pegel (in dBFS) frei gewählt werden (wobei Start- bzw. Stopfrequenz entsprechend dem Nyquist-Kriterium kleiner oder gleich der halben Abtastfrequenz sein müssen).
Dargestellt werden bei Sweep-Signalen das Signal im Zeitbereich sowie wahlweise das Energiedichte- oder das Leistungsdichtespektrum. Es besteht weiters die Möglichkeit, eine untere und eine obere Grenzfrequenz für die Darstellung des Signals im Frequenzbereich zu wählen. Bei Generierung eines Signals wird dieses zu Anfang als Energiedichtespektrum zwischen 0 Hz und der halben Samplingfrequenz (einseitiges Spektrum) angezeigt.
Abb. 1.4: Anzeigeparameter bei Spektren von Sinus-Signalen
Bei Wahl der MLS-Folge als Anregungssignal sind die wählbaren Parameter die Abtastfrequenz sowie die Ordnung der MLS, aus der in weiterer Folge die Dauer des Signals in Sekunden berechnet und angezeigt wird.
Angezeigt werden dann die MLS-Folge selbst, ihre (normierte) Autokorrelationsfunktion sowie das Leistungs- und das Energiedichtespektrum.

Projektarbeit Mehrkanalige Messung von Impulsantworten
Institut für Breitbandkommunikation 7
Abb. 1.5: Signalgenerator (MLS-Default)
Es besteht bei allen Plots die Möglichkeit, in die Plots hinein- bzw. herauszuzoomen. Ebenso kann bei Sweep-Signalen das Spektrum mit einer linear als auch einer logarithmisch skalierten x-Achse (halblogarithmisch) angezeigt werden.
Nach erfolgter Generierung eines Anregungssignals (bzw. nachdem ein solches geladen wurde), gelangt man über den „Messung“ - Button in der Menüleiste zum Mess-GUI, wobei das Anregungssignal, seine Parameter und sein etwaiger Speicherort mit übergeben werden.

Projektarbeit Mehrkanalige Messung von Impulsantworten
Institut für Breitbandkommunikation 8
1.2 Messung
Ruft man das Mess-GUI aus dem Signalgenerator-Teil auf, erscheint analog zu diesem ein Fenster mit Einstellmöglichkeiten und Buttons auf der linken Seite und zunächst leeren Plots auf der rechten Seite.
Abb. 1.6: Messung (Default)
Die Einstellmöglichkeiten in den linken Panels betreffen (von oben nach unten) den zu verwendenden Audio-Treiber, die Anzahl der Messkanäle (je nach Treiber bis zu 2 bzw. 8) sowie die ungefähre erwartete Nachhallzeit.
Darunter befindet sich ein Panel, in dem ein weiteres GUI aufgerufen wird: in diesem können die verwendeten Mikrofone bzw. Aufnahmepfade zur Sicherstellung der Richtigkeit der Darstellung der Systemantwort kalibriert werden. Es ist aber auch möglich, eine schon zuvor durchgeführte Kalibrierung zu laden.
Im untersten Panel befinden sich, wieder analog zum Signalgenerator-Teil, Buttons zur Durchführung der Messung, zur Speicherung und zum Laden bereits durchgeführter Messungen sowie ein „Beenden“-Button.
Im untersten Teil des GUIs befindet sich eine Statuszeile, die Informationen zum verwendeten Anregungssignal sowie den eventuellen Speicherort desselben erhält.
Abb. 1.7: Statuszeile (Beispielsignal)
Projektarbeit Mehrkanalige Messung von Impulsantworten
Institut für Breitbandkommunikation 9
Angezeigt werden im rechten Panel nach Durchführung der Messung in der oberen Zeile die Antwort des gemessenen Systems sowie das Energiedichtespektrum desselben. In der unteren Zeile wird die aus der Systemantwort berechnete Impulsantwort sowie deren Spektrum (entspricht dem Frequenzgang des Systems) angezeigt. Ebenso wie im Signalgenerator kann bei der Anzeige der Spektren zwischen linearer und halblogarithmischer Anzeige umgeschaltet werden.
Nach durchgeführter Messung erscheint links ein Panel mit Optionen zur Darstellung der Messergebnisse. Es ist hier möglich, einzelne Kanäle direkt anzuwählen, als auch sequentiell alle Kanäle durchzugehen.
Abb. 1.8: Anzeigeoptionen
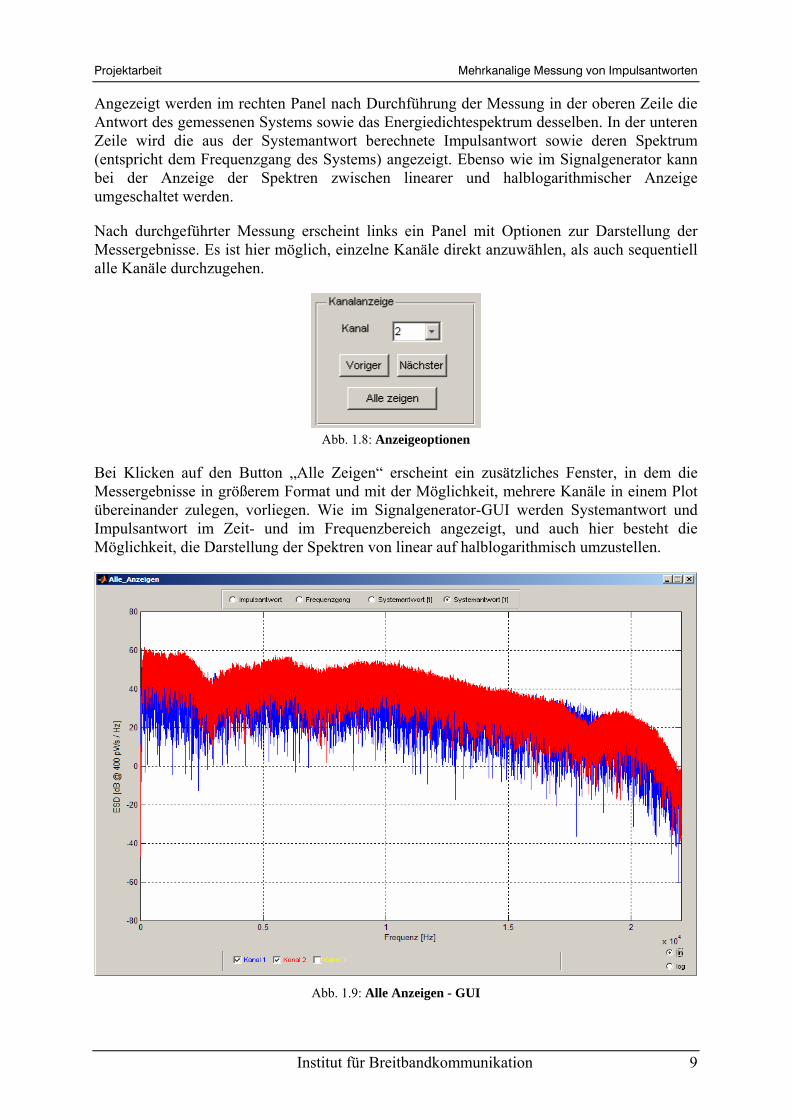
Bei Klicken auf den Button „Alle Zeigen“ erscheint ein zusätzliches Fenster, in dem die Messergebnisse in größerem Format und mit der Möglichkeit, mehrere Kanäle in einem Plot übereinander zulegen, vorliegen. Wie im Signalgenerator-GUI werden Systemantwort und Impulsantwort im Zeit- und im Frequenzbereich angezeigt, und auch hier besteht die Möglichkeit, die Darstellung der Spektren von linear auf halblogarithmisch umzustellen.
Abb. 1.9: Alle Anzeigen - GUI

Projektarbeit Mehrkanalige Messung von Impulsantworten
Institut für Breitbandkommunikation 10
2 Theorie
In diesem Kapitel wird auf den theoretischen Hintergrund einiger wichtiger in diesem Projekt verwendeter Begriffe eingegangen.
2.1 Anregungssignale
Verfahren zur Messung der Impulsantwort werden hauptsächlich hinsichtlich der Art ihres Erregersignals unterschieden. Wichtige Parameter bei dieser Einteilung betreffen z.B. den Signal-Rausch-Abstand (SNR), die Einfachheit und Dauer der Messung, die Energie des Signals etc.
2.1.1 Impuls
Ein idealer (Dirac-) Impuls ist definiert als
{ , 00 , 0( ) x
xxδ ∞ =≠=
und es gilt
( ) 1x dxδ∞
−∞
=∫
d.h. ein idealer Impuls ist unendlich hoch und unendlich schmal; die Fläche unter dem Impuls beträgt 1.
Ein idealer Impuls ist aber nicht realisierbar. In der akustischen Messtechnik wird zur Erzeugung eines möglichst idealen (d.h. möglichst lauten und kurzen) Impulses z.B. ein Pistolenknall oder ein Schlagbrett verwendet. Ein Impuls besitzt ein breites und flaches Amplitudenspektrum, was bedeutet, dass viele Frequenzen im gleichen Maße angeregt werden können.
Die Antwort des Systems entspricht - wie der Name sagt - der Impulsantwort, was den Vorteil hat, dass zur Charakterisierung des Systems keine weiteren Berechnungen notwendig sind.

Projektarbeit Mehrkanalige Messung von Impulsantworten
Institut für Breitbandkommunikation 11
Nachteile der Messung mit Impulsen sind der geringe Signal-Rausch-Abstand sowie der geringe Energiegehalt des Signals, außerdem die Empfindlichkeit gegenüber transienten (kurzzeitigen) Störungen.
Der große Vorteil der Messung mit Impulsen, nämlich der geringe Messaufwand bedingt durch das einfach zu erzeugende Signal, wurde durch die in den letzten Jahren stattfinden Leistungssteigerungen im Computerbereich und Verbesserungen in der Signalverarbeitung, durch die heutzutage auch andere Messsignale mit geringem Aufwand auch auf handelsüblichen Heim-PCs realisierbar sind, weitgehend zunichte gemacht. Als Pluspunkte verbleiben jedoch die oben genannte Tatsache, dass die Antwort des Systems auf den Impuls bereits die gesuchte Größe ist, sowie der Vorteil gegenüber Rauschsignalen, dass sowohl die Amplituden- als auch die Phasenlage genau definiert sind.
2.1.2 Sweeps
Ein Sinus-Signal ist im Grunde ein auf eine Frequenz beschränktes Signal, das der Gleichung
( ) sin( )x t A tω θ= ⋅ ⋅ +
genügt, wobei A die Amplitude, ω die Momentanfrequenz und θ den Phasenversatz beschreiben. Die Kreisfrequenz ω ist konstant und kann über folgende Formel berechnet werden:
[ ]/ 2 [ ]rad s f Hzω π= ⋅ ⋅
Bei Sinus-Sweeps bleibt nun die Momentanfrequenz ω nicht mehr konstant, sondern wird nach einer Berechnungsvorschrift variiert.
Der Vorteil einer Messung mit Sinus-Sweeps ist die hohe SNR, der hohe Energiegehalt sowie die Möglichkeit, den interessierenden Messbereich und damit den Frequenzbereich frei wählen zu können. Ein Sweep ist mittlerweile auch auf Heim-PCs mit relativ einfachen Mitteln generierbar.
Nachteile dieser Meßmethode sind die Empfindlichkeit gegenüber kurzzeitigen (transienten) Störungen und Nichtlinearitäten des Systems sowie die gegenüber der Impulsmessung um ein Vielfaches längere Messzeit.
Zur Generierung von Sinus-Sweeps sind zwei Vorgehensweisen denkbar: entweder man berechnet das Signal im Zeitbereich und erhält das Spektrum des Signals durch Fourier-Transformation, oder man geht den umgekehrten Weg und synthetisiert das Signal im Frequenzbereich, woraus das Zeitsignal durch inverse Fourier-Transformation abgeleitet werden kann. In dieser Projektarbeit wurde der Ansatz im Zeitbereich sowohl für den linearen als auch für den logarithmischen Sweep angewandt, da sich dieser bewährt hat und in der Literatur (vgl. Farina [2]) angetroffen wird. Der mathematische Ansatz zur Herleitung des Signals entspricht dem bei Weselak [5], für eine alternative Vorgehensweise siehe Farina [2].

Projektarbeit Mehrkanalige Messung von Impulsantworten
Institut für Breitbandkommunikation 12
2.1.2.1 Lineare Sweeps
Wie oben erwähnt, bleibt die Momentanfrequenz ω bei Sweeps nicht konstant, sondern ändert sich mit der Zeit entsprechend einer mathematischen Vorschrift.
Beim linearen Sweep kann man sich den Anstieg der Momentanfrequenz als eine allgemeine Gerade
y k x d= ⋅ +
mit k als Steigung und d als Verschiebung des Nulldurchgangs vorstellen. Umgelegt auf die Momentanfrequenz kann man schreiben
( )t k t dω = ⋅ +
Zur Berechnung der Parameter k und d müssen Randbedingungen aufgestellt werden. Die Momentanfrequenz zum Zeitpunkt Null soll der Startfrequenz des Sweeps entsprechen:
( 0) starttω ω= =
Ebenso soll die Momentanfrequenz zum Zeitpunkt T (Endzeitpunkt) der Stopfrequenz entsprechen:
( ) stopt Tω ω= =
Setzt man beide Bedingungen in die obige Gleichung ein, ergibt sich für die Steigung
stop startkT
ω ω−=
und für die Verschiebung des Nulldurchgangs
startd ω=
Damit ergibt sich die Momentanfrequenz zu
( ) stop startstartt t
Tω ω
ω ω−
= ⋅ +
Zur vollständigen Beschreibung des Sweeps fehlt noch die Berücksichtigung der Phase. Die Momentanfrequenz ω ist definiert als die Änderung der Phase eines Signals, also
( )( ) d ttdtϕω =
Somit ergibt sich die Phase zu
( ) ( )t t dtϕ ω= ∫
Setzt man den zuvor erhaltenen Ausdruck für ω(t) ein, erhält man für die Phase

Projektarbeit Mehrkanalige Messung von Impulsantworten
Institut für Breitbandkommunikation 13
²( )2
stop startstart
tt t CT
ω ωϕ ω
−= ⋅ + ⋅ +
Als Bedingung für die Phase gilt, dass diese zu Beginn des Sweeps Null sein soll:
( 0) 0tϕ = =
womit sich für die Phase ergibt
²( )2
stop startstart
tt tT
ω ωϕ ω
−= ⋅ + ⋅
und daraus für das Zeitsignal des linearen Sinus-Sweeps folgt
²( ) sin( ( )) sin2
stop startstart
tx t t tT
ω ωϕ ω
−⎛ ⎞= = ⋅ + ⋅⎜ ⎟
⎝ ⎠
Ersetzt man noch die Kreisfrequenz, so folgt
²( ) sin 22
stop startstart
f f tx t f tT
π⎡ − ⎤⎛ ⎞
= ⋅ ⋅ ⋅ + ⋅⎢ ⎥⎜ ⎟⎝ ⎠⎣ ⎦
2.1.2.2 Logarithmische Sweeps
Logarithmische Sweeps (die in der Literatur auch oft „Exponentielle Sweeps“ genannt werden - siehe Weselak [5]) sind Sweeps, bei denen sich die Momentanfrequenz nicht linear, sondern logarithmisch bzw. exponentiell verändert. Hintergrundgedanke ist der folgende: beim linearen Sweep wird die Dauer auf jede Frequenz gleichmäßig verteilt. Das ergibt jedoch bei tiefen Frequenzen ein Problem, da diese nur kurz „angeschnitten“ werden und somit das System oder den Raum nur unzureichend anregen können. Abhilfe soll ein Signal schaffen, das bei tieferen Frequenzen länger verweilt und somit in diesem Frequenzbereich den Raum ebensoviel anregt wie bei hohen Frequenzen. In Anlehnung an den linearen Sweep kann man sich den Verlauf der Momentanfrequenz als allgemeine exponentielle Funktion vorstellen:
xdy A b= ⋅
mit A als Anfangswert, b als exponentielle Basis und d als Proportionalitätskonstante.
Umgelegt auf den Sweep bedeutet das
( )t
t A bτω = ⋅
mit der Zeitkonstante τ.

Projektarbeit Mehrkanalige Messung von Impulsantworten
Institut für Breitbandkommunikation 14
Als Randbedingungen werden wie beim linearen Sweep
( 0) starttω ω= =
und
( ) stopt Tω ω= =
gesetzt, woraus sich durch Einsetzen in die Formel für ( )tω der Anfangswert
startA ω=
und die Zeitkonstante
log stopb
start
Tτ ωω
=⋅
ergeben. Daraus folgt für die Momentanfrequenz
log
( )
stopb
startt
Tstartt b
ωω
ω ω⋅ ⋅
= ⋅
und für die Phase
( )ln( )
tt
start startbt b dt C
b
ττϕ ω ω τ= ⋅ = ⋅ ⋅ +∫
Nach Einsetzen der Bedingung
( 0) 0tϕ = =
ergibt sich
( )ln( ) ln( )
t
start startbt
b b
τ τϕ ω τ ω= ⋅ ⋅ − ⋅
Daraus folgt für das Zeitsignal des logarithmischen Sweeps
( ) sinln( ) ln( )
t
start startbx t
b b
τ τω τ ω⎛ ⎞⎜ ⎟= ⋅ ⋅ − ⋅⎜ ⎟⎜ ⎟⎝ ⎠
und in weiterer Folge

Projektarbeit Mehrkanalige Messung von Impulsantworten
Institut für Breitbandkommunikation 15
( ) sin 1ln( )
log
tT
stopstart
stop startb
start
Tx tb
ωωω ωω
⎛ ⎞⎛ ⎞⎜ ⎟⎛ ⎞⎜ ⎟⎜ ⎟= ⋅ ⋅ −⎜ ⎟⎜ ⎟⎜ ⎟⎛ ⎞ ⎝ ⎠⎜ ⎟⎜ ⎟⎝ ⎠⎜ ⎟⎜ ⎟⎝ ⎠⎝ ⎠
Ersetzt man noch die Kreisfrequenz, so folgt
( ) sin 2 1ln( )
log
tT
stopstart
stop startb
start
ff Tx tf b ff
π
⎛ ⎞⎛ ⎞⎜ ⎟⎛ ⎞⎜ ⎟⎜ ⎟= ⋅ ⋅ ⋅ ⋅ −⎜ ⎟⎜ ⎟⎜ ⎟⎛ ⎞ ⎝ ⎠⎜ ⎟⎜ ⎟⎝ ⎠⎜ ⎟⎜ ⎟⎝ ⎠⎝ ⎠
Die Vorteile und Nachteile des linearen Sweeps treffen im Großen und Ganzen auch auf den logarithmischen Sweep zu. Bei diesem kommt jedoch die verbesserten SNR bei tiefen Frequenzen und bessere Anregung des zu messenden Systems im tieffrequenten Bereich als Vorteil hinzu, während man als Nachteil die etwas komplexere Berechnung sehen kann.
Zu bemerken ist noch, dass die Wahl der Basis des Logarithmus b keinen Einfluss auf das Signal hat - das Produkt
log ln( )stopb
start
fb
f⎛ ⎞
⋅⎜ ⎟⎝ ⎠
bleibt auch bei Änderung von b konstant.
2.1.3 MLS-Folgen
MLS- (Maximum Length Sequence-) Folgen sind binäre Pseudo-Zufallsfolgen, die mithilfe von Schieberegistern bzw. deren Software-Entsprechung realisiert werden können. Entscheidend ist hier, dass nicht das Signal einem idealen Impuls gleichen muss, sondern die Autokorrelationsfunktion des Signals.
Die MLS-Folge basiert mathematisch gesehen auf den so genannten „Primitiven Polynomen“. Diese werden so genannt, weil der kleinste gemeinsame Nenner seiner Koeffizienten 1 ist – es lässt sich nicht weiter zerlegen oder kürzen. Die Implementierung dieser Polynome erfolgt über Schieberegister, die über EXOR-Gatter rückgekoppelt sind. Die logischen Zustände sind gleichverteilt.
Kennzeichnender Parameter der MLS-Folge ist seine Ordnung m. Diese entspricht dem Grad des der Folge zugrunde liegenden primitiven Polynoms, der Anzahl der benötigten Schieberegister sowie deren Länge, und sie bestimmt auch die Periodendauer des Signals; es gilt
2 1mL = −

Projektarbeit Mehrkanalige Messung von Impulsantworten
Institut für Breitbandkommunikation 16
Dies bedeutet, dass am Ausgang eine Pseudo-Zufallsfolge von L Zuständen ausgegeben wird, die nach dem L-ten Wert periodisch wiederholt wird.
Die zeitliche Dauer der MLS-Folge und in weiterer Folge die Frequenzauflösung wird ebenso von der Periodendauer bestimmt. Es gilt
1 sffT L
Δ = =
Die Messung mit MLS-Folgen ist eine Korrelationsmesstechnik. Die MLS-Folge x[n] wird mit der durch sie hervorgerufenen Systemantwort y[n] kreuzkorreliert und auf die Periodendauer der MLS bezogen:
1
0
1[ ] [ ] [ ]1
L
xyk
n x k y k nL
−
=
Ω = ⋅ ⋅ −+ ∑
Die Systemantwort y[n] ist aber nichts anderes als die Faltung des Anregungssignals x[n] mit der (periodischen) Impulsantwort h[n] des Systems:
[ ] [ ] [ ]y n x n h n= ⊗
Durch Ausnutzen der Assoziativäts-Eigenschaft kann so die Korrelation von x[n] mit ( [ ] [ ])x n h n⊗ auf die Faltung der Autokorrelation ( [ ] [ ])x n x n⊗ mit h[n] umgeschrieben werden. Dadurch ist es möglich, die Kreuzkorrelation zwischen x[n] und y[n] auf eine Faltung der Autokorrelationsfunktion mit der (periodischen) Impulsantwort des Systems zurückzuführen:
1
0
1[ ] [ ] [ ]1
L
xyk
n h n h kL
−
=
Ω = − ⋅+ ∑
Der zweite Term in obiger Gleichung entspricht einem Gleichanteil, der für große Periodendauern L sehr klein wird und somit vernachlässigt werden kann. Somit reduziert sich die Berechnung der Impulsantwort h[n] auf die Kreuzkorrelation zwischen Ein- und Ausgang eines Systems. Somit kann die Impulsantwort eines Systems angenähert beschrieben werden als
[ ] [ ]xyh n n≈ Ω
Damit werden die Vorteile der MLS-Messtechnik ersichtlich: durch die Erleichterung, dass nicht das Anregungssignal selbst, sondern deren Autokorrelationsfunktion einem Impuls gleichen muss, was bei Rauschen prinzipiell zutrifft, kann die SNR erheblich erhöht werden. Theoretisch ergibt sich ein Dynamikgewinn gegenüber der Impulsmessung von
10 log( ) 3L m⋅ ≈ ⋅ [dB]
Dieser wird jedoch durch reale Bauteilgegebenheiten auf maximal etwa 40 dB beschränkt. Die Messung mit MLS-Folgen ist auch unempfindlich bei transienten Störungen, kann aber leicht durch nichtlineare Verzerrungen verfälscht werden. Das Signal besitzt als Pseudorauschen ein breites und flaches Amplitudenspektrum, was bedeutet, dass alle Frequenzen im selben Maß angeregt werden.

Projektarbeit Mehrkanalige Messung von Impulsantworten
Institut für Breitbandkommunikation 17
2.2 Impulsantwort
Die Impulsantwort ist die Antwort eines Systems auf einen Impuls. Sie kann zur Beschreibung des Übertragungsverhaltens von Systemen dienen. Die Anwendung der Impulsantwort ist nicht auf die Raumakustik begrenzt; sie ist ebenfalls eine wichtige Größe in der Elektroakustik (z.B. zur Beschreibung des Übertragungsverhaltens von Lautsprechern), in der digitalen Signalverarbeitung (z.B. zur Charakterisierung von Filtern) sowie in der Elektrotechnik.
Abb. 2.1: Ausschnitt aus einer gemessenen Impulsantwort
Erkennbar ist das Überschwingen nach dem Impuls. Aus der Abklingzeit der in das System eingebrachten Energie bei Messungen in Räumen können raumakustische Parameter wie die Nachhallzeit berechnet werden.
Das Pendant der Impulsantwort im Frequenzbereich ist der Frequenzgang eines Systems. Aus ihm kann direkt die Verstärkung bzw. Abschwächung verschiedener Frequenzen bei Durchgang durch das gemessene System abgelesen werden.
Abb. 2.2: Gemessener Frequenzgang
Projektarbeit Mehrkanalige Messung von Impulsantworten
Institut für Breitbandkommunikation 18
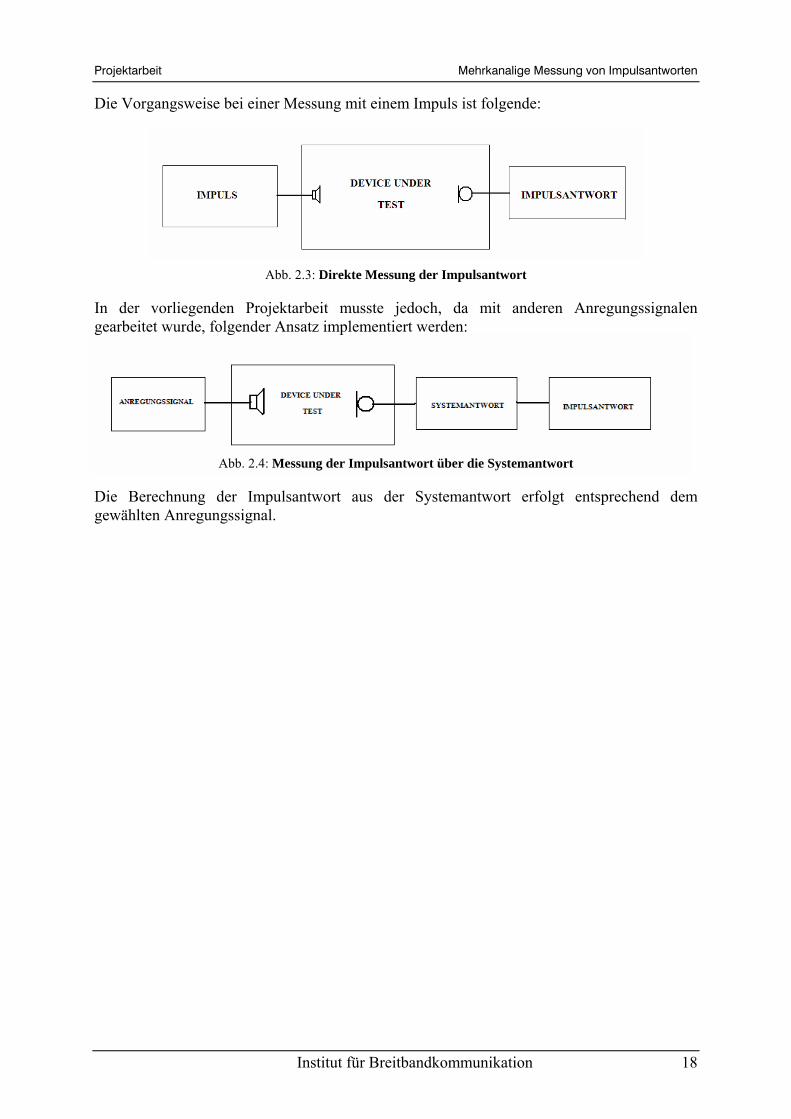
Die Vorgangsweise bei einer Messung mit einem Impuls ist folgende:
Abb. 2.3: Direkte Messung der Impulsantwort
In der vorliegenden Projektarbeit musste jedoch, da mit anderen Anregungssignalen gearbeitet wurde, folgender Ansatz implementiert werden:
Abb. 2.4: Messung der Impulsantwort über die Systemantwort
Die Berechnung der Impulsantwort aus der Systemantwort erfolgt entsprechend dem gewählten Anregungssignal.
Projektarbeit Mehrkanalige Messung von Impulsantworten
Institut für Breitbandkommunikation 19
3 Implementierung
In diesem Kapitel werden einige wichtige Aspekte der Implementierung des Impulsantwortmoduls in MATLAB dargestellt.
3.1 Anregungssignale
3.1.1 Linearer Sweep
→ linsweep.m
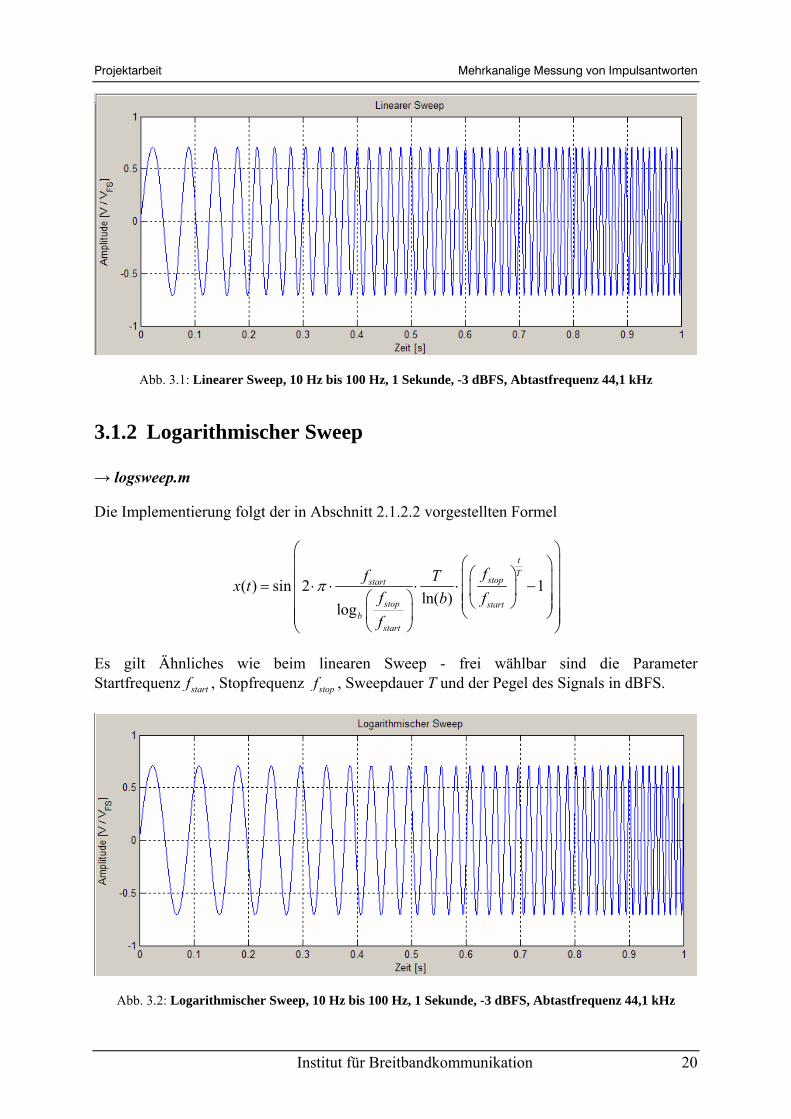
Der Sweep folgt in der Implementierung der in Abschnitt 2.1.2.1 vorgestellten Formel. Nach Generation eines Zeitvektors t wird dieser in
²( ) sin 22
stop startstart
f f tx t f tT
π⎡ − ⎤⎛ ⎞
= ⋅ ⋅ ⋅ + ⋅⎢ ⎥⎜ ⎟⎝ ⎠⎣ ⎦
eingesetzt, um den linearen Sweep zu erhalten.
Der Sweep wird in der Einheit FS
VV⎡ ⎤⎢ ⎥⎣ ⎦
dargestellt, d.h. er pendelt zwischen den Werten [-1,1].
Die Startfrequenz startf , die Stopfrequenz stopf sowie die Sweepdauer T sind frei wählbar (solange das Abtasttheorem eingehalten wird - startf und stopf müssen kleiner oder gleich der halben Abtastfrequenz sein; wird ein unpassender Wert eingegeben, erschein eine Fehlermeldung und die betroffene Frequenz wird auf einen Wert gesetzt, der das Abtasttheorem erfüllt). Ebenso ist der Pegel in dBFS wählbar. Dieser wird dem Signal in der Form
[ ]20[ ] [ ] 10
Pegel dBFS
signal n signal n= ⋅
beaufschlagt.
Projektarbeit Mehrkanalige Messung von Impulsantworten
Institut für Breitbandkommunikation 20
Abb. 3.1: Linearer Sweep, 10 Hz bis 100 Hz, 1 Sekunde, -3 dBFS, Abtastfrequenz 44,1 kHz
3.1.2 Logarithmischer Sweep
→ logsweep.m
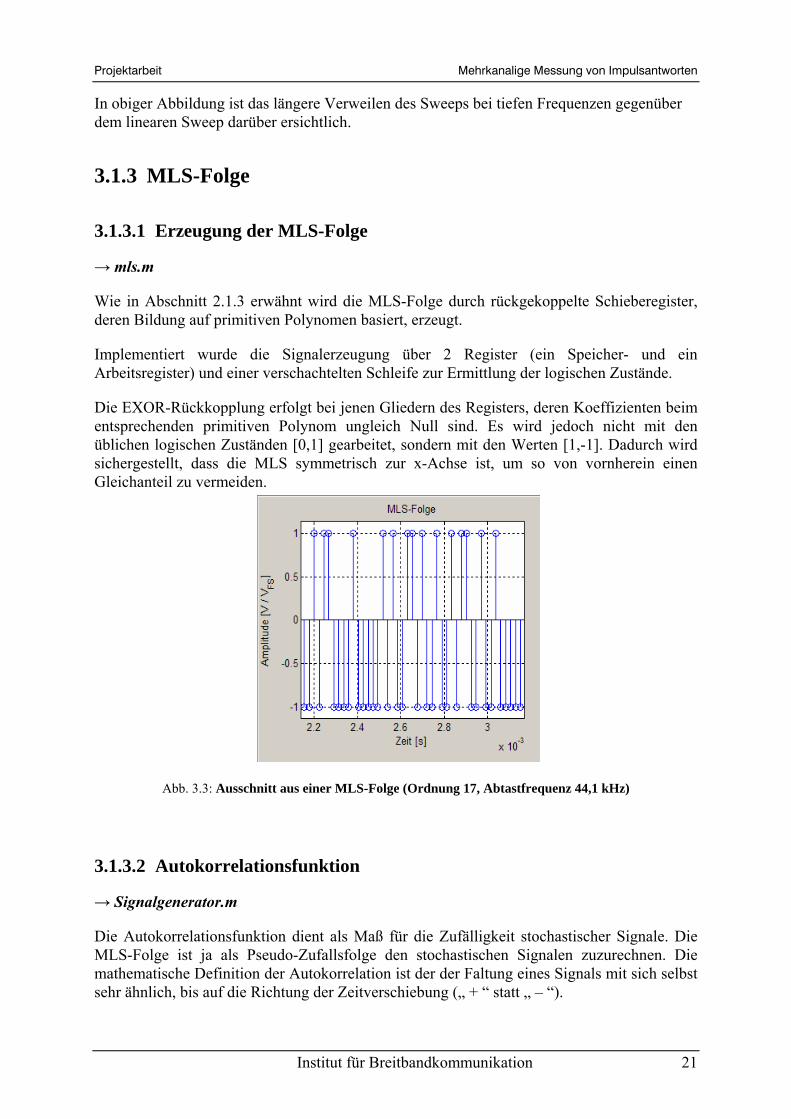
Die Implementierung folgt der in Abschnitt 2.1.2.2 vorgestellten Formel
( ) sin 2 1ln( )
log
tT
stopstart
stop startb
start
ff Tx tf b ff
π
⎛ ⎞⎛ ⎞⎜ ⎟⎛ ⎞⎜ ⎟⎜ ⎟= ⋅ ⋅ ⋅ ⋅ −⎜ ⎟⎜ ⎟⎜ ⎟⎛ ⎞ ⎝ ⎠⎜ ⎟⎜ ⎟⎝ ⎠⎜ ⎟⎜ ⎟⎝ ⎠⎝ ⎠
Es gilt Ähnliches wie beim linearen Sweep - frei wählbar sind die Parameter Startfrequenz startf , Stopfrequenz stopf , Sweepdauer T und der Pegel des Signals in dBFS.
Abb. 3.2: Logarithmischer Sweep, 10 Hz bis 100 Hz, 1 Sekunde, -3 dBFS, Abtastfrequenz 44,1 kHz
Projektarbeit Mehrkanalige Messung von Impulsantworten
Institut für Breitbandkommunikation 21
In obiger Abbildung ist das längere Verweilen des Sweeps bei tiefen Frequenzen gegenüber dem linearen Sweep darüber ersichtlich.
3.1.3 MLS-Folge
3.1.3.1 Erzeugung der MLS-Folge
→ mls.m
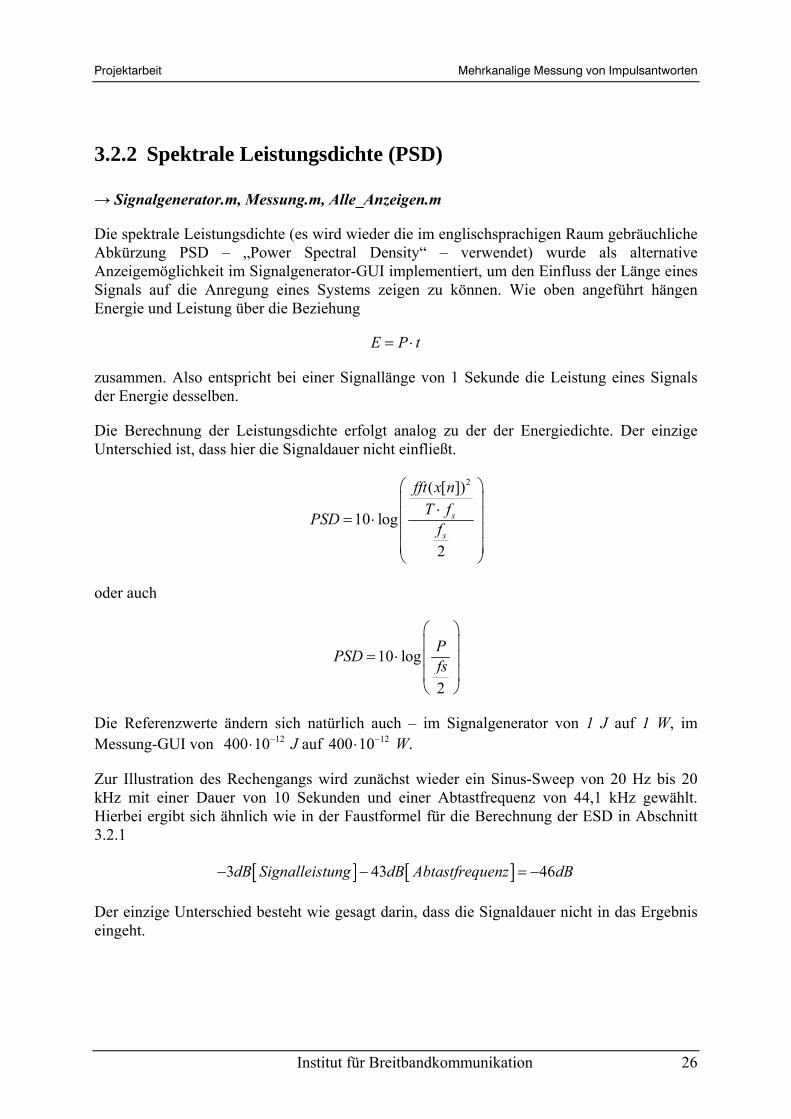
Wie in Abschnitt 2.1.3 erwähnt wird die MLS-Folge durch rückgekoppelte Schieberegister, deren Bildung auf primitiven Polynomen basiert, erzeugt.
Implementiert wurde die Signalerzeugung über 2 Register (ein Speicher- und ein Arbeitsregister) und einer verschachtelten Schleife zur Ermittlung der logischen Zustände.
Die EXOR-Rückkopplung erfolgt bei jenen Gliedern des Registers, deren Koeffizienten beim entsprechenden primitiven Polynom ungleich Null sind. Es wird jedoch nicht mit den üblichen logischen Zuständen [0,1] gearbeitet, sondern mit den Werten [1,-1]. Dadurch wird sichergestellt, dass die MLS symmetrisch zur x-Achse ist, um so von vornherein einen Gleichanteil zu vermeiden.
Abb. 3.3: Ausschnitt aus einer MLS-Folge (Ordnung 17, Abtastfrequenz 44,1 kHz)
3.1.3.2 Autokorrelationsfunktion
→ Signalgenerator.m
Die Autokorrelationsfunktion dient als Maß für die Zufälligkeit stochastischer Signale. Die MLS-Folge ist ja als Pseudo-Zufallsfolge den stochastischen Signalen zuzurechnen. Die mathematische Definition der Autokorrelation ist der der Faltung eines Signals mit sich selbst sehr ähnlich, bis auf die Richtung der Zeitverschiebung („ + “ statt „ – “).

Projektarbeit Mehrkanalige Messung von Impulsantworten
Institut für Breitbandkommunikation 22
1
0
1[ ] [ ] [ ]L
xxk
n x k x k nL
−
=
Φ = ⋅ ⋅ +∑
Für stochastische Signale, und somit auch für die MLS-Folge, muss
{0, 00, 0[ ] n
xx nn ≠≠ =Φ =
gelten, d.h. es darf nur einen „Peak“ in der Autokorrelationsfunktion geben genau dann, wenn das Signal mit der Zeitverschiebung Null, d.h. mit sich selbst multipliziert wird.
Die Berechnung der Autokorrelation erfolgte mit der MATLAB-eigenen Funktion xcorr( ) im Signalgenerator-GUI selbst.
Abb. 3.4: Autokorrelationsfunktion einer MLS-Folge (Ordnung 17, Abtastfrequenz 44,1 kHz)
3.2 Darstellung der Spektren
In dieser Projektarbeit wurde zur Darstellung des Spektrums der Anregungssignale bzw. der Messergebnisse durchwegs die spektrale Energiedichte bzw. die spektrale Leistungsdichte gewählt, da hier in einer kompakten Darstellung viel Information über das Signal enthalten ist.
3.2.1 Spektrale Energiedichte (ESD)
→ Signalgenerator.m, Messung.m, Alle_Anzeigen.m
Die spektrale Energiedichte (in dieser Projektarbeit wird die im englischsprachigen Raum gebräuchliche Abkürzung ESD – „Energy Spectral Density“ – verwendet) gibt Auskunft

Projektarbeit Mehrkanalige Messung von Impulsantworten
Institut für Breitbandkommunikation 23
darüber, wie viel Energie in jeder Frequenz bzw. in jedem Frequenzband eines Signals enthalten ist.
Bei der Berechnung der ESD wurde das Parseval-Theorem für zeitdiskrete Signale,
1 12 2
0 0
1[ ] [ ]N N
n kx n X k
N
− −
= =
= ⋅∑ ∑
das besagt, dass die Leistung eines Zeitsignals dem quadrierten und auf die Gesamtzahl der Samples bezogenen Spektrum entspricht, ausgenutzt. Zur Berechnung der Transformation des Signals in den Frequenzbereich wurde die MATLAB-Funktion fft( ) verwendet.
Die Vorgehensweise war folgende:
Zunächst wurde das Signal in den Frequenzbereich transformiert und quadriert:
21[ ] ( [ ])X k fft x n=
Danach wurde es auf die Gesamtzahl der Samples, in diesem Fall aus dem Produkt von Abtastfrequenz und Signaldauer, bezogen.
1 12
[ ] [ ][ ]s
X k X kX kN T f
= =⋅
[W]
Um von der Leistung zur Energie zu kommen, muss noch die Dauer des Signals einfließen. Es gilt ja
E P t= ⋅
was in diesem Fall bedeutet
3 2[ ] [ ]X k X k T= ⋅ [Ws] = [J]
Um die Energie in jedem Frequenzband berechnen zu können, muss sie auf die Abtastfrequenz bzw. in diesem Fall, da ja ein einseitiges Spektrum dargestellt werden soll, auf die halbe Abtastfrequenz bezogen werden.
34
[ ][ ]
2s
X kX k f= JHz⎡ ⎤⎢ ⎥⎣ ⎦
Um das Signal nun noch logarithmisch darstellen zu können, muss ein passender Referenzwert gefunden werden, um die Energie darauf beziehen zu können. Im Signalgenerator-GUI erschien der Wert 1 Ws = 1 J sinnvoll, da das Zeitsignal nur Werte zwischen [1,-1] annehmen kann und 1 J der somit maximal möglichen Energie entspricht.
Also kann man zusammenfassend die Berechnung des Energiedichtespektrums so schreiben

Projektarbeit Mehrkanalige Messung von Impulsantworten
Institut für Breitbandkommunikation 24
2( [ ])
10 log
2
s
s
fft x n TT fESD f
⎛ ⎞⋅⎜ ⎟⋅⎜ ⎟= ⋅⎜ ⎟⎜ ⎟⎝ ⎠
oder auch
10 log
2
P TESD fs
⎛ ⎞⎜ ⎟⋅
= ⋅ ⎜ ⎟⎜ ⎟⎝ ⎠
So könnte man sich zum Beispiel für einen generellen linearen Sweep von 20 Hz bis 20 kHz mit einer Dauer von 10 Sekunden und einer Abtastfrequenz von 44,1 kHz das Energiedichtespektrum folgendermaßen ohne Taschenrechner oder Computer ausrechnen:
Bei sinusförmigen Signalen zwischen [-1,1] ist der Effektivwert („RMS“) ja als 12
bekannt.
Daraus ergibt sich eine Leistung von 12
2
2RMS
VV⎡ ⎤⎢ ⎥⎣ ⎦
, was -3 dB entspricht. Zu diesen -3 dB
kommen 10 dB hinzu (Multiplikation mit der Dauer des Sweeps) und es werden 43 dB (Division durch die halbe Abtastfrequenz) abgezogen, was zu diesem Ergebnis führt:
[ ] [ ] [ ]3 10 43 36dB Signalleistung dB Signaldauer dB Abtastfrequenz dB− + − = −
Das ist in der folgenden Abbildung 3.5 ersichtlich.
Abb. 3.5: ESD Linearer Sweep, 20 bis 20 kHz, Dauer 10s, Pegel 0 dBFS, Abtastfrequenz 44,1 kHz
Bei den MLS-Folgen erfolgte die Berechnung analog zum oben gesagten. Nimmt man als Beispiel ein MLS-Signal mit Ordnung 17, was eine Dauer von knapp 3 Sekunden bedeutet, und einer Abtastfrequenz von 44,1 kHz ergibt sich analog zum obigen Beispiel mit dem Sinussignal

Projektarbeit Mehrkanalige Messung von Impulsantworten
Institut für Breitbandkommunikation 25
[ ] [ ] [ ]0 5 43 38dB Signalleistung dB Signaldauer dB Abtastfrequenz dB+ − = −
was in der folgenden Abbildung 3.6 zu sehen ist.
Abb. 3.6: ESD MLS-Folge, Ordnung 17, Abtastfrequenz 44,1 kHz
Im Messung-GUI wird für die Darstellung des Spektrums der Systemantwort im Grossen und Ganzen auf dieselbe Berechnung zurückgegriffen. Als Referenz gilt jedoch nicht mehr 1 J. Da die Domäne nun nicht mehr primär Signalverarbeitung, sondern Akustik ist, schien ein akustischer Parameter sinnvoll. Gewählt wurde als Bezugswert 12400 10−⋅ J, da dies der Energie bei der kleinsten vom Menschen wahrnehmbaren Druckänderung entspricht.
Abb. 3.7: ESD der Systemantwort (Messung mit MLS, Ordnung 17, Abtastfrequenz 44,1 kHz, ASIO)
Projektarbeit Mehrkanalige Messung von Impulsantworten
Institut für Breitbandkommunikation 26
3.2.2 Spektrale Leistungsdichte (PSD)
→ Signalgenerator.m, Messung.m, Alle_Anzeigen.m
Die spektrale Leistungsdichte (es wird wieder die im englischsprachigen Raum gebräuchliche Abkürzung PSD – „Power Spectral Density“ – verwendet) wurde als alternative Anzeigemöglichkeit im Signalgenerator-GUI implementiert, um den Einfluss der Länge eines Signals auf die Anregung eines Systems zeigen zu können. Wie oben angeführt hängen Energie und Leistung über die Beziehung
E P t= ⋅
zusammen. Also entspricht bei einer Signallänge von 1 Sekunde die Leistung eines Signals der Energie desselben.
Die Berechnung der Leistungsdichte erfolgt analog zu der der Energiedichte. Der einzige Unterschied ist, dass hier die Signaldauer nicht einfließt.
2( [ ])
10 log
2
s
s
fft x nT fPSD f
⎛ ⎞⎜ ⎟⋅⎜ ⎟= ⋅⎜ ⎟⎜ ⎟⎝ ⎠
oder auch
10 log
2
PPSD fs
⎛ ⎞⎜ ⎟
= ⋅ ⎜ ⎟⎜ ⎟⎝ ⎠
Die Referenzwerte ändern sich natürlich auch – im Signalgenerator von 1 J auf 1 W, im Messung-GUI von 12400 10−⋅ J auf 12400 10−⋅ W.
Zur Illustration des Rechengangs wird zunächst wieder ein Sinus-Sweep von 20 Hz bis 20 kHz mit einer Dauer von 10 Sekunden und einer Abtastfrequenz von 44,1 kHz gewählt. Hierbei ergibt sich ähnlich wie in der Faustformel für die Berechnung der ESD in Abschnitt 3.2.1
[ ] [ ]3 43 46dB Signalleistung dB Abtastfrequenz dB− − = −
Der einzige Unterschied besteht wie gesagt darin, dass die Signaldauer nicht in das Ergebnis eingeht.

Projektarbeit Mehrkanalige Messung von Impulsantworten
Institut für Breitbandkommunikation 27
Abb. 3.8: PSD Linearer Sweep, 20 bis 20 kHz, Dauer 10s, Pegel 0 dBFS, Abtastfrequenz 44,1 kHz
Bei MLS-Folgen gilt für die Berechnung der PSD ähnlich wie bei der Berechnung der ESD die Faustformel
[ ] [ ]0 43 43dB Signalleistung dB Abtastfrequenz dB− = −
Auch hier scheint die Dauer des Signals nicht im Ergebnis auf.
Abb. 3.9: PSD MLS-Folge, Ordnung 17, Abtastfrequenz 44,1 kHz
In den zwei obigen Abbildungen sieht man den Einfluss der Signaldauer. Im Vergleich zu den Abbildungen 3.5 und 3.6 im Abschnitt 3.2.1 ist der Wert der Spektraldichte beim Sweep um 10 dB, bei der MLS-Folge um etwa 5 dB geringer, was sich aus der Länge der Signale – 10 Sekunden beim Sweep und 3 Sekunden bei der MLS-Folge – erklären lässt.

Projektarbeit Mehrkanalige Messung von Impulsantworten
Institut für Breitbandkommunikation 28
3.3 Kalibrierung der Messkette
→ Kalibrierung.m, Messung.m
Im Messung-GUI muss, bevor eine Messung durchgeführt werden kann, erst die Messkette kalibriert werden, um eine einwandfreie und korrekt skalierte Darstellung der System- und Impulsantworten zu ermöglichen. Dazu wurde ein eigenes GUI implementiert.
Abb. 3.10: Kalibrierung-GUI
Im Optionen - Panel sind die Einstellungen für die Kalibrierung wie Audiotreiber und Abtastfrequenz sichtbar, können aber nicht mehr verändert werden. Der Schalldruckpegel, mit dem kalibriert werden soll, ist frei wählbar. Der zu kalibrierende Kanal, d.h. etwa ein Mikrofon im Raum, sollte mit dem im Kalibrierpegel-Textfeld einstellbaren Pegel (in dB SPL) beschallt werden. Dazu wäre ein definiertes Signal wie z.B. ein handelsüblicher Kalibrator, der häufig 94 dB SPL liefert, denkbar.
Der Algorithmus betrachtet zunächst das aufgenommene Signal, das sich in MATLAB zwischen [1,-1] bewegt. Werden Werte bei 1 oder -1 erkannt, wird eine Meldung ausgegeben, die anzeigt, dass der Messkanal übersteuert wird. Ist dies nicht der Fall, wird der Maximalwert des aufgenommenen Signals mit dem entlogarithmierten Wert des
Kalibrierpegels, d.h. dem Wert in Pascal verglichen. Dadurch ergibt sich ein Faktor in
FS
PaV
V
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
,
der später in der Messung eingesetzt wird, um die aufgenommenen Werte in Pascal anzeigen zu können.
Zusätzlich wird aus dem Kalibrierfaktor der Headroom berechnet, d.h. der maximal mögliche Schalldruckpegel, sodass die Aufnahme nicht übersteuert wird, und in einem Fenster ausgegeben. Dieser Pegel wird auch in das Hauptfenster des Mess-GUIs in ein eigenes Panel geschrieben.
Projektarbeit Mehrkanalige Messung von Impulsantworten
Institut für Breitbandkommunikation 29
Die ermittelten Kalibrierungsfaktoren können natürlich abgespeichert werden, wodurch nicht vor jeder Messung neu kalibriert werden muss, es reicht dann, das .dat-File mit den Kalibrierungsfaktoren zu laden.
3.4 Berechnung der Impulsantwort
→ Messung.m
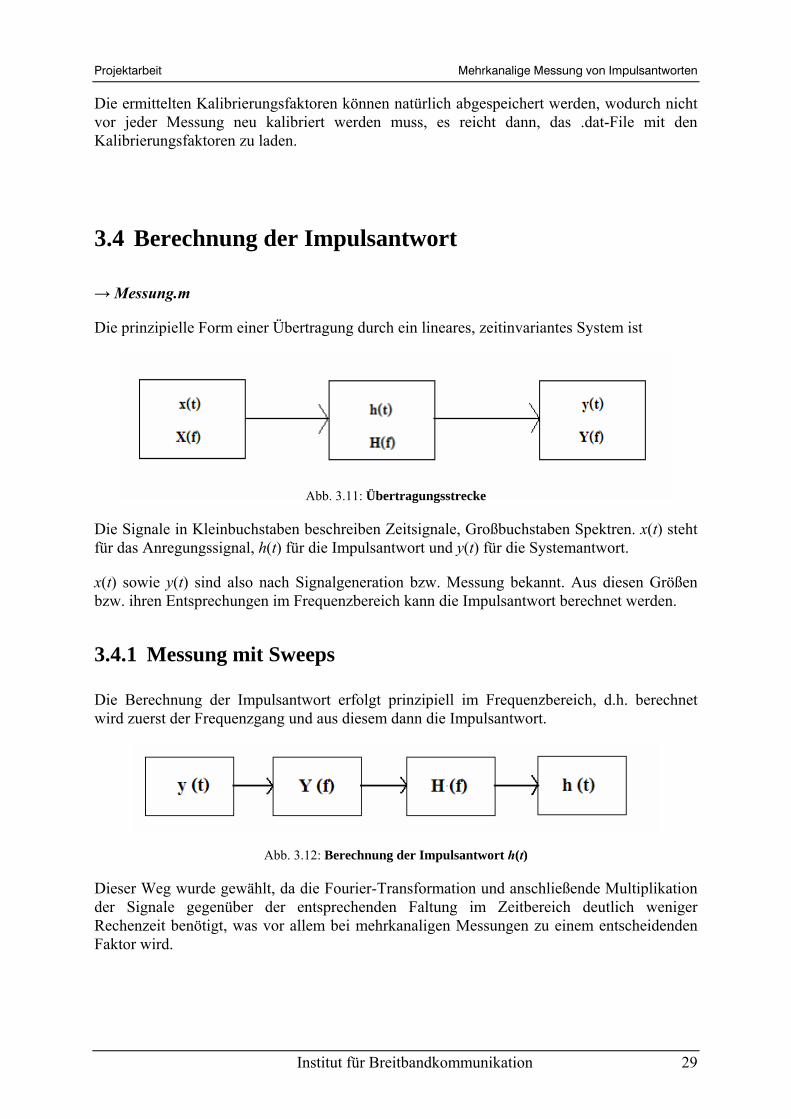
Die prinzipielle Form einer Übertragung durch ein lineares, zeitinvariantes System ist
Abb. 3.11: Übertragungsstrecke
Die Signale in Kleinbuchstaben beschreiben Zeitsignale, Großbuchstaben Spektren. x(t) steht für das Anregungssignal, h(t) für die Impulsantwort und y(t) für die Systemantwort.
x(t) sowie y(t) sind also nach Signalgeneration bzw. Messung bekannt. Aus diesen Größen bzw. ihren Entsprechungen im Frequenzbereich kann die Impulsantwort berechnet werden.
3.4.1 Messung mit Sweeps
Die Berechnung der Impulsantwort erfolgt prinzipiell im Frequenzbereich, d.h. berechnet wird zuerst der Frequenzgang und aus diesem dann die Impulsantwort.
Abb. 3.12: Berechnung der Impulsantwort h(t)
Dieser Weg wurde gewählt, da die Fourier-Transformation und anschließende Multiplikation der Signale gegenüber der entsprechenden Faltung im Zeitbereich deutlich weniger Rechenzeit benötigt, was vor allem bei mehrkanaligen Messungen zu einem entscheidenden Faktor wird.
Projektarbeit Mehrkanalige Messung von Impulsantworten
Institut für Breitbandkommunikation 30
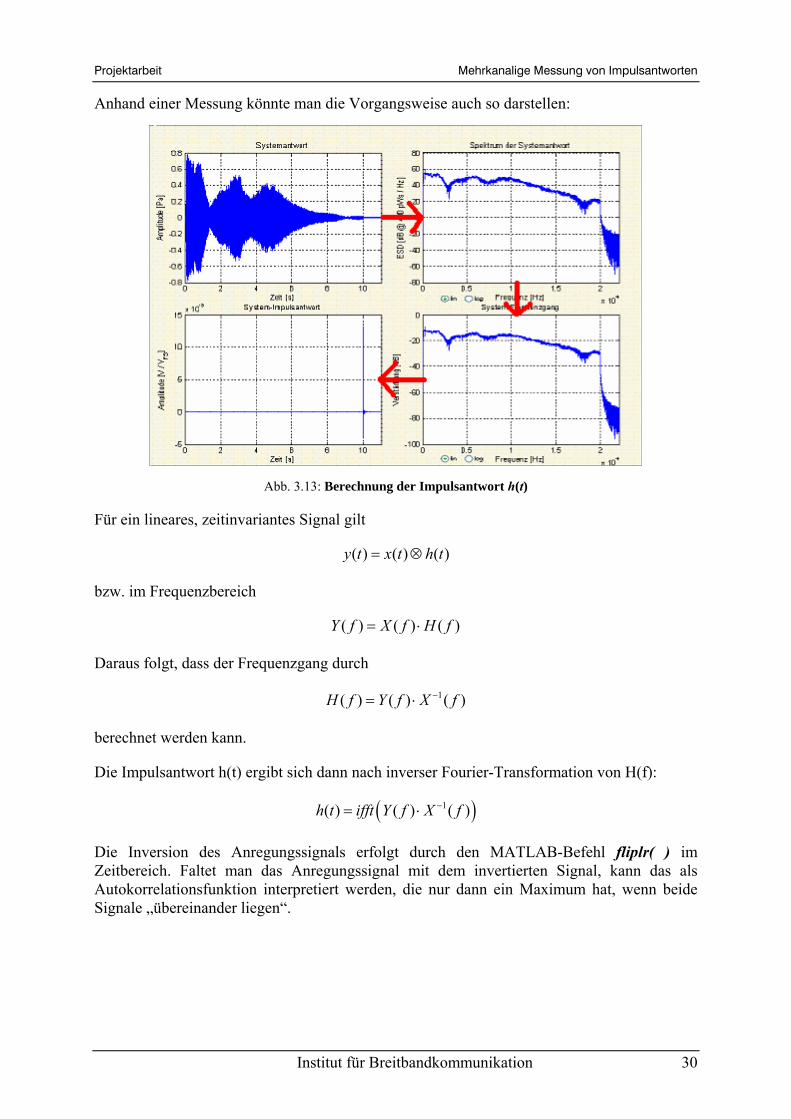
Anhand einer Messung könnte man die Vorgangsweise auch so darstellen:
Abb. 3.13: Berechnung der Impulsantwort h(t)
Für ein lineares, zeitinvariantes Signal gilt
( ) ( ) ( )y t x t h t= ⊗
bzw. im Frequenzbereich
( ) ( ) ( )Y f X f H f= ⋅
Daraus folgt, dass der Frequenzgang durch
1( ) ( ) ( )H f Y f X f−= ⋅
berechnet werden kann.
Die Impulsantwort h(t) ergibt sich dann nach inverser Fourier-Transformation von H(f):
( )1( ) ( ) ( )h t ifft Y f X f−= ⋅
Die Inversion des Anregungssignals erfolgt durch den MATLAB-Befehl fliplr( ) im Zeitbereich. Faltet man das Anregungssignal mit dem invertierten Signal, kann das als Autokorrelationsfunktion interpretiert werden, die nur dann ein Maximum hat, wenn beide Signale „übereinander liegen“.

Projektarbeit Mehrkanalige Messung von Impulsantworten
Institut für Breitbandkommunikation 31
Abb. 3.14: Linearer Sweep von 20 bis 200 Hz, inverser Sweep und das Faltungsergebnis der beiden
Im Falle des logarithmischen Sweeps wird das Signal vor der Transformation in den Frequenzbereich zusätzlich mit einer Kompensationsfunktion multipliziert, um die höhere Energie des Signals im tiefen Frequenzbereich auszugleichen. Die Implementierung der Kompensationsfunktion folgt der bei Majdak [6] vorgestellten. Es wird ein Vektor komp[n] generiert, der zunächst linear von -20 bis 0 geht. Dieser bekommt durch die Operation
[ ] 12010
komp n⎛ ⎞+⎜ ⎟⎝ ⎠
einen exponentiellen Verlauf. Nach Multiplikation des Kompensationsvektors komp[n] mit dem Anregungssignal wird die längere Verweildauer des Sweeps bei tiefen Frequenzen durch eine höhere Amplitude bei hohen Frequenzen ausgeglichen.
Abb. 3.15: Kompensation des logarithmischen Sweeps
Projektarbeit Mehrkanalige Messung von Impulsantworten
Institut für Breitbandkommunikation 32
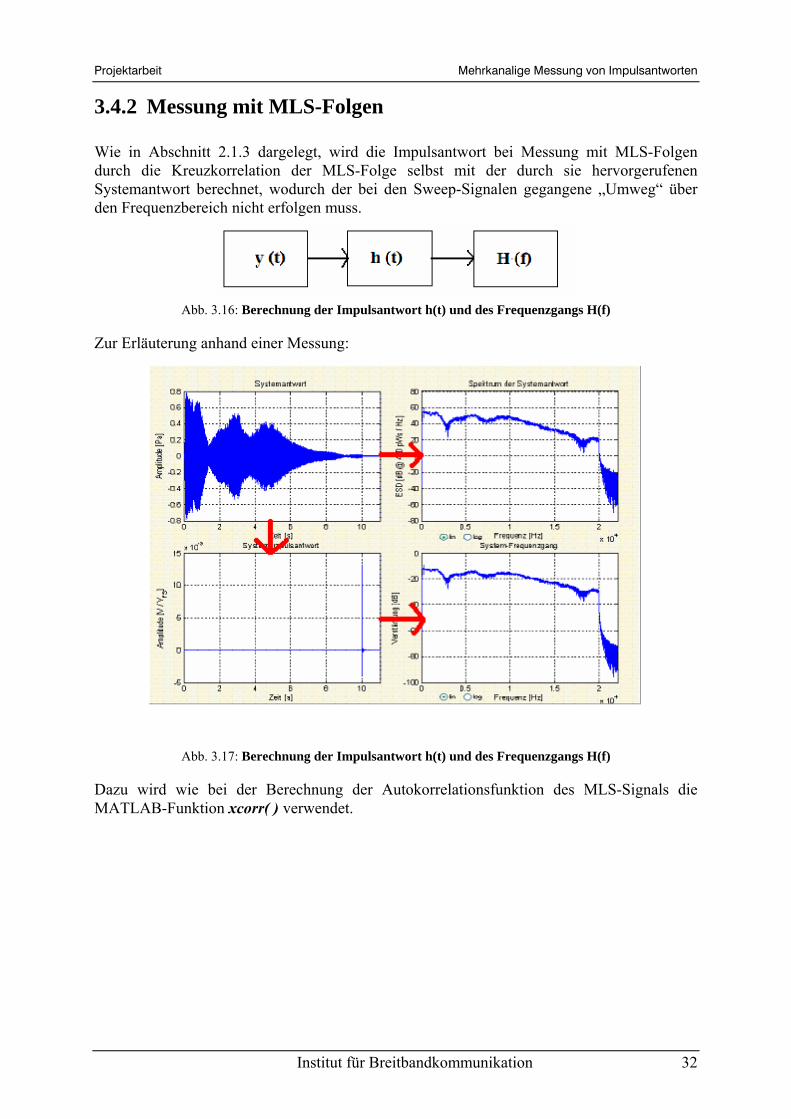
3.4.2 Messung mit MLS-Folgen
Wie in Abschnitt 2.1.3 dargelegt, wird die Impulsantwort bei Messung mit MLS-Folgen durch die Kreuzkorrelation der MLS-Folge selbst mit der durch sie hervorgerufenen Systemantwort berechnet, wodurch der bei den Sweep-Signalen gegangene „Umweg“ über den Frequenzbereich nicht erfolgen muss.
Abb. 3.16: Berechnung der Impulsantwort h(t) und des Frequenzgangs H(f)
Zur Erläuterung anhand einer Messung:
Abb. 3.17: Berechnung der Impulsantwort h(t) und des Frequenzgangs H(f)
Dazu wird wie bei der Berechnung der Autokorrelationsfunktion des MLS-Signals die MATLAB-Funktion xcorr( ) verwendet.

Projektarbeit Mehrkanalige Messung von Impulsantworten
Institut für Breitbandkommunikation 33
Abb. 3.18: Darstellung der verwendeten Signale zur Berechnung der Impulsantwort
3.5 Speichern und Laden
3.5.1 Anregungssignale
→ Signalgenerator.m
Alle generierten Anregungssignale können gespeichert werden.
Dabei erscheint ein Dialogfeld, in dem der gewünschte Speicherort festgelegt werden kann. Da das Signal nur Werte zwischen [-1,1] besitzt, kann es ohne Normalisierung als .wav-File abgespeichert werden, da Clipping nicht auftreten kann. Das Signal wird mit der MATLAB-Funktion wavwrite( ) in die gewünschte Datei geschrieben.
Zusätzlich wird mit der MATLAB-Funktion csvwrite( ) ein .dat-File mit gleichem Namen wie das .wav-File abgespeichert, in dem die für das Signal relevanten Parameter abgespeichert werden.
Abb. 3.19: .dat-File bei Sinussignalen
Der erste Wert im .dat-File bei Sinussignalen ist ein Indikator für das Signal (1 steht für den linearen, 2 für den logarithmischen Sweep), es folgen die Abtastfrequenz, die Dauer des Signals in Sekunden, die Start- und die Stopfrequenz sowie der Signalpegel in dBFS.

Projektarbeit Mehrkanalige Messung von Impulsantworten
Institut für Breitbandkommunikation 34
Abb. 3.20: .dat-File bei MLS-Folgen
Beim Speichern von MLS-Folgen werden in das .dat-File nur die Abtastfrequenz und die Ordnung geschrieben.
Beim Laden des Signals wird das .wav-File eingelesen und in den entsprechenden Plots dargestellt, die Parameter wie Signalart, Abtastfrequenz usw. werden aus dem .dat-File ausgelesen und in die Textfelder eingegeben, die Buttons werden entsprechend gesetzt.
3.5.2 Messergebnisse
→ Messung.m, Messung_Speichern.m
Bei der Speicherung von Messergebnissen ist die Vorgehensweise zunächst anders. Bei Klick auf den „Messung Speichern“-Button erscheint ein neues GUI, das dafür zuständig ist.
Abb. 3.21: GUI Messung_Speichern
In diesem GUI erscheinen ebenso viele Checkboxen, wie Messkanäle bei der Messung verwendet wurden. Es ist nun möglich, nur die gewünschten Kanäle zu speichern und z.B. fehlerhafte oder uninteressante Kanäle wegzuschalten.
Bei der Speicherung selber erscheint wieder ein Dialogfeld, in dem der gewünschte Speicherort angegeben werden kann. In ein .dat-File dieses Namens werden die Parameter der Messung geschrieben (Anregungssignal, -parameter, Abtastfrequenz etc.). Es wird ein Ordner mit dem Namen des .dat-Files angelegt, in den sämtliche dazugehörigen Files abgelegt werden, um gute Übersichtlichkeit und einfaches Laden zu gewährleisten.
Abb. 3.22: .dat-File bei Messung mit Sweeps

Projektarbeit Mehrkanalige Messung von Impulsantworten
Institut für Breitbandkommunikation 35
Bei Sweep-Messungen sind die Parameter in der Datei von links nach rechts der Audiotreiber, ein Indikator für das Anregungssignal, die Sweepdauer, die Abtastfrequenz, die Start- und die Stopfrequenz und der Pegel in dBFS. Die darauf folgenden 8 Ziffern geben über die verwendete Kanalanzahl Aufschluss (1 bedeutet, dass dieser Kanal in der Messung verwendet wurde) und die letzte Ziffer ist ein Indikator, ob das Anregungssignal gespeichert oder geladen wurde. Zur besseren Übersicht folgt eine Tabelle mit den Namen der gespeicherten Parameter sowie der Werte, die sie annehmen können.
Tab. 3.1: Parameter im .dat-File bei Speichern von Messungen mit Sweeps
Bei Messungen mit MLS-Folgen wird ebenso ein .dat-File mit den für die Messung wichtigen Parametern angelegt.
Abb.3.23: .dat-File bei Messung mit MLS-Folgen
Stelle im .dat-File Beschreibung
Mögliche Werte Bedeutung
1 Audiotreiber 0 WIN
1 ASIO 2 Signalindikator 1 Linearer Sweep
2 Logarithmischer Sweep 3 Sweepdauer 4 Abtastfrequenz 5 Startfrequenz 6 Stopfrequenz 7 Pegel 8 Messkanal 1 0 nicht bei Messung verwendet
1 bei Messung verwendet 9 Messkanal 2 0 nicht bei Messung verwendet
1 bei Messung verwendet 10 Messkanal 3 0 nicht bei Messung verwendet
1 bei Messung verwendet 11 Messkanal 4 0 nicht bei Messung verwendet
1 bei Messung verwendet 12 Messkanal 5 0 nicht bei Messung verwendet
1 bei Messung verwendet 13 Messkanal 6 0 nicht bei Messung verwendet
1 bei Messung verwendet 14 Messkanal 7 0 nicht bei Messung verwendet
1 bei Messung verwendet 15 Messkanal 8 0 nicht bei Messung verwendet
1 bei Messung verwendet
16 Speichern/Laden 0 Anregungssignal neu
1 Anregungssignal gespeichert oder geladen

Projektarbeit Mehrkanalige Messung von Impulsantworten
Institut für Breitbandkommunikation 36
Bei Messungen mit MLS-Folgen stehen in der Datei von links nach rechts wieder der Treiber, der Indikator für das Anregungssignal, die MLS-Dauer in Sekunden, die Abtastfrequenz und die Ordnung der MLS-Folge. Darauf folgen wie oben die Indikatoren für die verwendeten Messkanäle und der Indikator für Laden/Speichern des Anregungssignals.
Die Bedeutung der Ziffern und Indikatoren wird in der nachfolgenden Tabelle näher erläutert.
Stelle im .dat-File Beschreibung Mögliche Werte Bedeutung
1 Audiotreiber 0 WIN 1 ASIO
2 Signalindikator 4 MLS-Folge 3 MLS Dauer 4 Abtastfrequenz 5 Ordnung 6 Messkanal 1 0 nicht bei Messung verwendet
1 bei Messung verwendet 7 Messkanal 2 0 nicht bei Messung verwendet
1 bei Messung verwendet 8 Messkanal 3 0 nicht bei Messung verwendet
1 bei Messung verwendet 9 Messkanal 4 0 nicht bei Messung verwendet
1 bei Messung verwendet 10 Messkanal 5 0 nicht bei Messung verwendet
1 bei Messung verwendet 11 Messkanal 6 0 nicht bei Messung verwendet
1 bei Messung verwendet 12 Messkanal 7 0 nicht bei Messung verwendet
1 bei Messung verwendet 13 Messkanal 8 0 nicht bei Messung verwendet
1 bei Messung verwendet 14 Speichern/Laden 0 Anregungssignal neu
1 Anregungssignal gespeichert oder geladen
Tab. 3.2: Parameter im .dat-File bei Speichern von Messungen mit MLS-Folgen
Außerdem werden pro zu speicherndem Kanal zwei Systemantwortfiles und ein Impulsantwortfile angelegt, das Impulsantwort-File im .wav-Format, das Systemantwort-File im .wav und im .dat-Format. Die Namen dieser Files sind identisch mit dem Speicherordner, es wird nur jeweils IR_[Kanalnummer] für die Impulsantwort bzw. SR_[Kanalnummer] für die Systemantwort vorangestellt, um die Namensgebung einheitlich und doch verständlich zu halten. In den .wav-Files sind die System- und Impulsantworten gespeichert, um diese auch separat anhören zu können und aus Gründen der Kompatibilität mit anderen Programmen. In dem .dat-File steht die Systemantwort in Pascal als Matrix getrennt durch Kommazeichen.
Sollte das Anregungssignal außerdem noch im Signalgenerator-GUI gespeichert oder geladen worden sein, wird ein zusätzliches .dat-File mit dem Suffix „_text“ mit dem Speicherort erstellt.

Projektarbeit Mehrkanalige Messung von Impulsantworten
Institut für Breitbandkommunikation 37
Beim Laden werden die .dat-Files mit den Werten der System- bzw. Impulsantworten geladen und diese direkt in die Plots übertragen.
Abb. 3.24: Ordner „Messung_Logsweep_20_20k“ mit gespeicherten Messergebnissen

Projektarbeit Mehrkanalige Messung von Impulsantworten
Institut für Breitbandkommunikation 38
4 Durchführung einer Messung
In diesem Abschnitt wird die prinzipielle Durchführung von Messungen mit dem Impulsantwortmodul anhand einer realen Messung Schritt für Schritt demonstriert.
Die Messung wurde im Tonlabor des Instituts für Breitbandkommunikation durchgeführt. Verwendet wurde ein handelsüblicher Laptop mit RME Fireface 400 Audio-Schnittstelle. Das Anregungssignal wurde über das Behringer-Mischpult Eurorack MX602A geroutet aus einem Adam Monitorlautsprecher wiedergegeben. Die Systemantwort wurde mit 3 AKG C480B Mikrofonen mit Kugelcharakteristik aufgenommen. Als Audiotreiber wurde der ASIO-Treiber der RME-Schnittstelle gewählt. Zum Kalibrieren wurde ein Brüel&Kjaer Calibrator Type 4230 verwendet, der 94 dB SPL bei 1000 Hz abgibt.
Abb. 4.1: Verwendete Messumgebung
Eine typische Umgebung für die Messung einer (Raum-) Impulsantwort wäre z.B. die folgende:
Abb. 4.2: Typische Messumgebung

Projektarbeit Mehrkanalige Messung von Impulsantworten
Institut für Breitbandkommunikation 39
Für den Anwender ist wichtig zu wissen, dass nur die Eingangsseite des Systems (vom Mikrofon zum Mess-PC) vom Tool kalibriert werden kann. Die Einstellungen der Ausgangsseite (PC-Lautstärke, Verstärkung des Mischpults, Wiedergabe des Lautsprechers) müssen vom Anwender selbst vorgenommen werden. Um verwertbare Ergebnisse zu erhalten, sollte die Ausgangsseite vor der eigentlichen Messung konfiguriert werden und für die Dauer der Messung unangetastet bleiben.
Zum Start einer Messung muss in MATLAB „Impulsantwortmodul“ aufgerufen werden. Von dort gelangt man über den Punkt „Signalgenerator“ in der Menüzeile in das GUI für die Anregungssignalgeneration.
4.1 Signalgeneration
Der erste Schritt bei der Durchführung einer Impulsantwortmessung ist die Wahl des Anregungssignals. Dies kann durch Generierung eines Sweeps oder einer MLS-Folge oder durch das Laden eines zuvor generierten Signals erfolgen.
Bei Generierung eines Signals muss zuerst das gewünschte Signal gewählt werden. Dies erfolgt im Panel „Signalart“.
Abb. 4.3: Auswahl des Anregungssignals
Hat man sich für ein Anregungssignal entschieden, müssen die Parameter desselben im Panel „Sweep-Parameter“ bzw. „MLS-Parameter“ festgelegt werden.
Abb. 4.4: Wählbare Parameter bei Sweep-Signalen
Zu beachten ist hier, dass die Start- und die Stopfrequenz des Sweeps dem Abtasttheorem genügen. Bei Wahl des linearen Sweeps als Anregungssignal ist auch die Generierung eines reinen Sinustones möglich.

Projektarbeit Mehrkanalige Messung von Impulsantworten
Institut für Breitbandkommunikation 40
Abb. 4.5: Wählbare Parameter bei MLS-Folgen
Bei Wahl der MLS-Folge als Anregungssignal kann die Ordnung frei zwischen 2 und 20 gewählt werden. Um jedoch eine aussagekräftige Messung zu haben, sollte die Ordnung größer als 15 sein. Die Dauer in Sekunden der MLS-Folge, die sich durch die Ordnung ergibt, wird nach Generierung des Signals in das Textfeld unter der MLS-Ordnung geschrieben.
Nach der Generierung des Signals wird es im rechten Fenster sowohl im Zeitbereich als auch im Frequenzbereich angezeigt. Bei allen Plots besteht die Möglichkeit zu zoomen, indem man mit der linken Maustaste einen Bereich auswählt. Herauszoomen kann man mit ALT+linke Maustaste. Für Sweepsignale besteht die Möglichkeit, das Signal im Frequenzbereich sowohl als Energie- als auch als Leistungsdichtespektrum darzustellen und einen Bereich vorzugeben, in dem das Signal dargestellt werden soll. Dazu wählt man eine untere und eine obere Anzeigefrequenz im Panel „Spektrum Anzeige“ und drückt auf den Button „Anzeige“.
Abb. 4.6: Panel „Spektrum Anzeigen“ mit Einstellmöglichkeiten für Frequenzbereichsdarstellung
Es ist nun aber auch möglich, bereits generierte Signale zu laden. Dazu drückt man auf den Button „Signal laden“ im linken unteren Panel. In der sich öffnenden Dialogbox wählt man das zu ladende Signal im .wav-Format. Dieses wird dann geladen und dargestellt; die Parameter werden auf die des geladenen Signals gesetzt.
Bei der Messung im Rahmen des Projekts wurde ein linearer Sweep von 20 Hz bis 20 kHz gewählt und gespeichert.
Projektarbeit Mehrkanalige Messung von Impulsantworten
Institut für Breitbandkommunikation 41
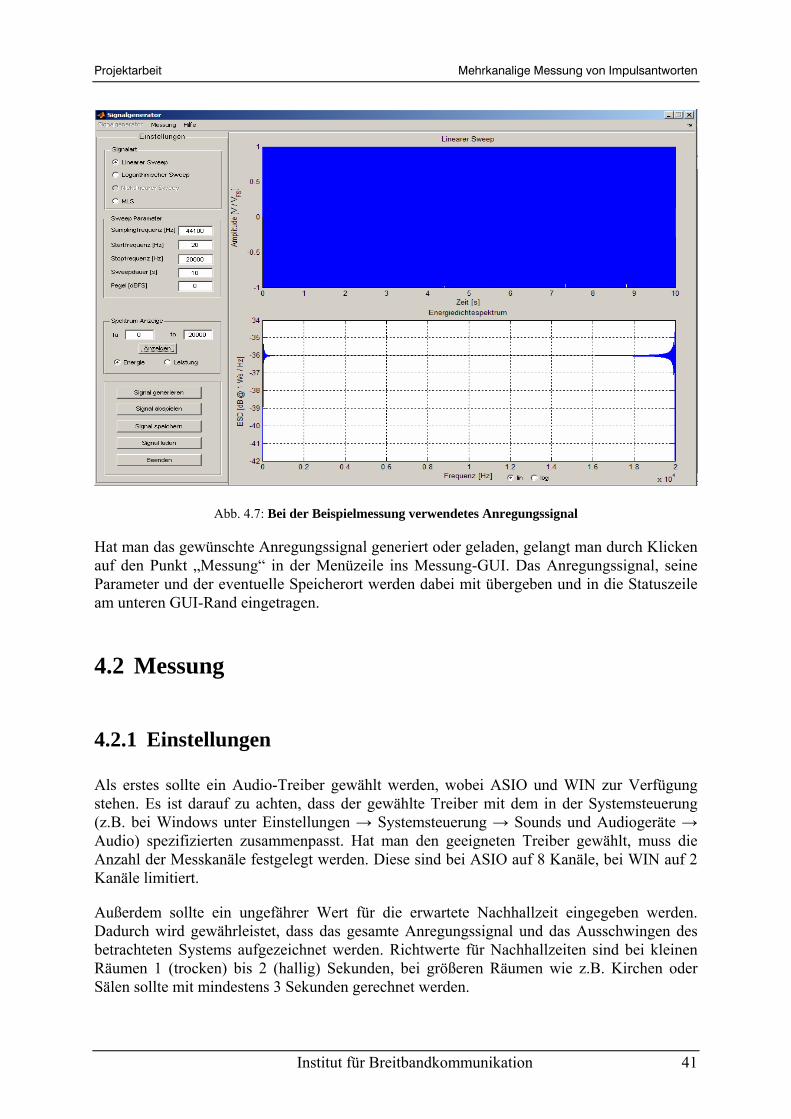
Abb. 4.7: Bei der Beispielmessung verwendetes Anregungssignal
Hat man das gewünschte Anregungssignal generiert oder geladen, gelangt man durch Klicken auf den Punkt „Messung“ in der Menüzeile ins Messung-GUI. Das Anregungssignal, seine Parameter und der eventuelle Speicherort werden dabei mit übergeben und in die Statuszeile am unteren GUI-Rand eingetragen.
4.2 Messung
4.2.1 Einstellungen
Als erstes sollte ein Audio-Treiber gewählt werden, wobei ASIO und WIN zur Verfügung stehen. Es ist darauf zu achten, dass der gewählte Treiber mit dem in der Systemsteuerung (z.B. bei Windows unter Einstellungen → Systemsteuerung → Sounds und Audiogeräte → Audio) spezifizierten zusammenpasst. Hat man den geeigneten Treiber gewählt, muss die Anzahl der Messkanäle festgelegt werden. Diese sind bei ASIO auf 8 Kanäle, bei WIN auf 2 Kanäle limitiert.
Außerdem sollte ein ungefährer Wert für die erwartete Nachhallzeit eingegeben werden. Dadurch wird gewährleistet, dass das gesamte Anregungssignal und das Ausschwingen des betrachteten Systems aufgezeichnet werden. Richtwerte für Nachhallzeiten sind bei kleinen Räumen 1 (trocken) bis 2 (hallig) Sekunden, bei größeren Räumen wie z.B. Kirchen oder Sälen sollte mit mindestens 3 Sekunden gerechnet werden.

Projektarbeit Mehrkanalige Messung von Impulsantworten
Institut für Breitbandkommunikation 42
Abb. 4.8: Einstellungen im Messung-GUI
4.2.2 Kalibrierung
Durch die Kalibrierung soll die richtig skalierte Darstellung der Systemantwort gewährleistet werden. Eine Messung kann nicht durchgeführt werden, wenn keine Kalibrierung vorgenommen bzw. wenn nicht eine vorher durchgeführte Kalibrierung geladen wurde.
Ins Kalibrierung-GUI kommt man durch Klicken auf den Button „Neu Kalibrieren“ im „Kalibrierung“-Panel. Alternativ kann bei Klicken auf „Kalibrierung laden“ ein .dat-File geladen werden, in dem eine frühere Kalibrierung gespeichert ist.
Abb. 4.9: „Kalibrierung“-Panel
Im Kalibrierung-GUI werden die vorher gewählten Einstellungen des Audiotreibers und der Kanalanzahl übernommen. Die Abtastfrequenz wird aus den Parametern des Anregungssignals übernommen. Einstellbar ist der Pegel des Kalibrierungssignals, das mit dem in der Bedienungsanleitung des Kalibrators angegebenen Pegel übereinstimmen sollte oder auf einen bekannten, definierten Pegel, den eine Schallquelle ausstrahlt, eingestellt werden sollte.

Projektarbeit Mehrkanalige Messung von Impulsantworten
Institut für Breitbandkommunikation 43
Abb. 4.10: Kalibrierung-GUI
Sind die Parameter eingestellt, kann die Kalibrierung erfolgen. Dazu sollte zuerst die Schallquelle angestellt bzw. der Kalibrator ans Mikrofon gehängt und angeschaltet werden, dann wird nach Drücken des Knopfes „Kalibrieren“ beim gewünschten Kanal die Kalibrierung gestartet. Hierbei wird 3 Sekunden das Signal aufgenommen. Um Fehler zu vermeiden, sollte darauf geachtet werden, in diesem Zeitraum keine Störungen der Aufnahme zu verursachen, indem z.B. der Kalibrator bewegt wird oder wenn laute Außengeräusche vorhanden sind.
Ist die Kalibrierung des Kanals beendet, erscheint entweder eine Fehlermeldung, wenn dieser übersteuert wurde; in diesem Fall sollte man den gesamten Kanal auf die Quelle der Übersteuerung überprüfen. Mögliche Ursachen sind zu hoher Gain bei eventuell benutzten Vorverstärkern. Oft kann auch bei Mikrofonen selbst noch eine Abschwächung sinnvoll sein. Ist der Kanal nicht übersteuert worden, erscheint eine Erfolgsmeldung, in der auch der für diesen Kanal maximal mögliche Schalldruckpegel bekannt gegeben wird.
Abb. 4.11: Meldung nach Kalibrierung eines Kanals mit zulässigem Schalldruckpegel
Dieser Maximalpegel wird auch in ein separates Panel im Messung-GUI selbst geschrieben.
Nach erfolgter Kalibrierung kann man mit den erhaltenen Kalibrierungsfaktoren ins Messung-GUI zurückkehren, es ist aber auch möglich, die Kalibrierung zur späteren Verwendung als .dat-File zu speichern.
Zu beachten ist, dass nur die Eingangsseite des Systems (Mikrofone) kalibriert wird, die Einstellung der Ausgangsseite (Lautsprecher, D/A-Wandler etc.) muss durch den Anwender selbst erfolgen!

Projektarbeit Mehrkanalige Messung von Impulsantworten
Institut für Breitbandkommunikation 44
4.2.3 Durchführung und Anzeige der Messung
Sind die erforderlichen Parameter eingestellt und die Kalibrierung erfolgt, kann durch Klicken auf den Knopf „Messung durchführen“ im linken unteren Panel die Messung gestartet werden. Das Anregungssignal wird abgespielt und die Systemantwort wird aufgenommen, und je nach Anregungssignal wird die Impulsantwort berechnet und angezeigt.
Abb. 4.12: Darstellung der Ergebnisse der Messung
Im linken oberen Plot befindet sich die Systemantwort, d.h. das aufgenommene Signal y(t). Rechts davon wird das Energiedichtespektrum der Systemantwort angezeigt.
Links unten wird die System-Impulsantwort h(t) und daneben der Frequenzgang des Systems H(f) angezeigt - wie beim Signalgenerator kann durch Ziehen eines Bereiches mit der Maus über einem Plot gezoomt werden.
Die Abschwächung der Frequenzen, wie er im Frequenzgang in Abb. 4.12 ersichtlich ist, hat mehrere Gründe: den Übergang von der elektrischen in die akustische Domäne und den nicht optimalen Wirkungsgrad des Lautsprechers, wodurch Leistung verloren geht. Außerdem bleibt bei einer Kugelschallquelle (der Lautsprecher kann vor allem im niederfrequenten Bereich durch ebendiese angenähert werden) zwar die Leistung unabhängig vom Abstand zum Lautsprecher konstant, aber die zur Aufnahme verwendeten Mikrofone messen nicht die Leistung, sondern Schalldruck bzw. Intensität, wobei die Intensität sehr wohl vom Abstand zum Lautsprecher entsprechend
24Ku
KuPI
rπ=
⋅ ⋅
abhängt (wobei r den Abstand zur Schallquelle bezeichnet).

Projektarbeit Mehrkanalige Messung von Impulsantworten
Institut für Breitbandkommunikation 45
Insofern ist für eine brauchbare Messung einer Raumimpulsantwort sowohl Rücksichtnahme auf die nicht-kalibrierbare und somit störungsempfindliche Ausgangsseite des Mess-Systems als auch eine sinnvolle Positionierung der Messmikrofone vonnöten.
Links befindet sich das Panel „Kanalanzeige“, in der der anzuzeigende Messkanal ausgewählt werden kann. Dies ist direkt über ein Pull-Down-Menü möglich, es kann aber auch jeder Plot sequentiell angezeigt werden, indem mit den Buttons „Voriger“ und „Nächster“ Kanal durch die Messkanäle durchgegangen wird.
Klickt man auf den Button „Alle Anzeigen“, erscheint ein neues GUI, in dem alle interessierenden Darstellungen noch einmal in größerer Form und mit der Möglichkeit, mehrere Kanäle gleichzeitig anzuzeigen, aufgerufen werden.
Abb. 4.13: Ausschnitt aus einer Impulsantwort im GUI „Alle_Anzeigen“
Oben befinden sich Auswahlknöpfe, mit denen bestimmt werden kann, ob Systemantwort, Impulsantwort oder Frequenzgang angezeigt werden soll.
Unten kann man über die Checkboxen diejenigen Kanäle auswählen, die angezeigt werden sollen.
In Messung-GUI ist das Laden und Speichern von Messungen möglich. Zum Speichern klickt man auf den Button „Messung Speichern“ links unten. Es erscheint daraufhin ein GUI, in dem diejenigen Kanäle ausgewählt werden können, die gespeichert werden sollen.

Projektarbeit Mehrkanalige Messung von Impulsantworten
Institut für Breitbandkommunikation 46
Abb. 4.14: GUI zum Speichern von Messergebnissen
Die Daten werden auf mehrere Dateien aufgeteilt. Über eine Dialogbox wird der Name der Messung als .dat-File eingegeben. In dieses File werden die Parameter der Messung geschrieben, und mit dem Namen dieses Files wird ein eigener Ordner im Zielverzeichnis erstellt, in den alle relevanten Files gespeichert werden.
Pro zu speicherndem Kanal werden je 2 Systemantwort-Files und 1 Impulsantwort-File erstellt: es wird je ein .wav-File geschrieben, die Systemantwort wird zusätzlich in ein .dat-File mit Werten in Pascal geschrieben. Die Files werden wieder nach dem Speicher-Ordner benannt, bekommen jedoch jeweils ein Präfix mit IR_[Kanalnummer] bzw. SR_[Kanalnummer]. Sollte außerdem das Anregungssignal noch im Signalgenerator-GUI gespeichert oder geladen worden sein, wird ein zusätzliches .dat-File mit dem Suffix „_text“ mit dem Speicherort erstellt.
Das Messung-GUI bietet auch die Möglichkeit, bereits durchgeführte Messungen zu laden und darzustellen. Dazu klickt man im Panel unten links auf „Messung laden“ und wählt aus dem Speicherordner, der den Namen der Messung trägt, das .dat-File ohne IR_- oder SR_-Präfix aus. Die entsprechenden Messdaten werden dann geladen und die Signale dargestellt.

Projektarbeit Mehrkanalige Messung von Impulsantworten
Institut für Breitbandkommunikation 47
5 Literaturverzeichnis
[1] ADRIAENSEN Fons: Acoustical Impulse Response Measurement with ALIKI, Proceedings of the 4th International Linux Audio Conference, Karlsruhe 2006
[2] FARINA Angelo: Simultaneous measurement of impulse response and distortion with a swept-sine technique, Proceedings of the 108th AES Convention, Paris 2000
[3] CREMER Lothar, MÜLLER Helmut: Die wissenschaftlichen Grundlagen der Raumakustik, S. Hirzel Verlag, Stuttgart 1978
[4] DOBLINGER Gerhard: MATLAB-Programmierung in der digitalen Signalverarbeitung, J. Schlembach Fachverlag, Weil der Stadt 2001
[5] GRABER Gerhard, WESELAK Werner: Skriptum zur Vorlesung „Raumakustik“, Graz 2003
[6] MAJDAK Pjotr: Skriptum zur Vorlesung „Algorithmen in Akustik und Computermusik“, Graz 2004
[7] OPPENHEIM Alan, SCHAFER Roland, BUCK John: Zeitdiskrete Signalverarbeitung, Pearson Verlag, München 2004
[8] POLETTI Mark: Linearly swept frequency measurements, Time-Delay Spectrometry and the Wigner Distribution, aus dem “Journal of the Audio Engineering Society”, Bd. 36, 1988
[9] VANDERKOOY John: Aspects of MLS measuring systems, aus dem “Journal of the Audio Engineering Society”, Bd. 42, 1994
[10] WESELAK Werner: Skriptum zur Vorlesung „Raumakustische Messtechnik“, Graz 2007