mechanical engineering crash course
DESCRIPTION
Mechanical Engineering Crash Course. Steve Evans Team 1294. Acknowledgements. Steve Evans- Team 1294 Brian Gattman- Team 2910 Andy Baker- Team 45. Mechanical Engineering. Very broad discipline Design Modular Design, Mechanical Devices, Drive Base, Design Process Drafting / CAD - PowerPoint PPT PresentationTRANSCRIPT

Pre-Season Workshop – November 2010
1
Mechanical Engineering Crash Course
Steve Evans
Team 1294

Pre-Season Workshop – November 2010
Acknowledgements
• Steve Evans - Team 1294• Brian Gattman - Team 2910• Andy Baker - Team 45
2

Pre-Season Workshop – November 2010
3
Mechanical Engineering
• Very broad discipline– Design
• Modular Design, Mechanical Devices, Drive Base, Design Process– Drafting / CAD
• Inventor and ProE– Manufacturing methods– Thermodynamics / Heat Transfer– Fluid Mechanics
• Pneumatics– Control and Measurement
• LabView, Electrical Design– Dynamics and Vibrations– Organization
• Project Management, Team Dynamics, Sources of Parts
• We have only 2 hours…
MechE related workshops available today

Pre-Season Workshop – November 2010
4
Agenda
• Example Problem Statement• FRC Knowledge Depth• Mechanical Engineering: FRC Introduction
– Forces & Moments– Free Body Diagrams– Stress & Strain– Mechanics of Materials– Work & Power– FRC Motors– Gear Ratios
• Problem Solution• Q&A (and throughout!)• Drivetrains• Arms & Lifts

Pre-Season Workshop – November 2010
5
Quick Poll
• Who has taken or understands… (not a contest)
– Trigonometry
– Physics
– Calculus

Pre-Season Workshop – November 2010
6
Example Problem Statement
• Lift a ball to the top of a goal– Start: ground
– End: 8 feet
– 5 lbs
– 3 ft diameter
• Use primitive design– Has many issues
– Not the point
Area of Interest

Pre-Season Workshop – November 2010
7
FRC Knowledge Depth
• 6 weeks: impossibly short– Know enough to be dangerous
– Make informed decisions
• Following info is “truth”– Assumptions required
• 80/20 Principle– Good for FIRST
– Not so good for airplanes

Pre-Season Workshop – November 2010
8
Non-Contact Forces
• Gravity– Holds you on Earth’s surface– Turns your “mass” into “weight”
– Holds planets in orbits, causes tides
• Magnetism– Cousin to electrical current– Motors, electromagnets, many more
– Why your microwave works
Tidal Force: Moon’s differential gravity field on earth’s surface

Pre-Season Workshop – November 2010
9
Contact Forces
• High School Physics
– Good approximations
– Works for FRC
• Industry– Accuracy required
Bird Strike: Simulation on jet engine blades
Classic HS Physics Problem

Pre-Season Workshop – November 2010
10
Moments (AKA Torque)
• Forces acting at a distance• M = r x F
– Moment = radius (distance) x Force (normal)
• Distance
• Force
• Sine of angle between
Bicep Curl: Looks a little like our robot problem…
Fr
M

Pre-Season Workshop – November 2010
11
Fundamentals and Units
• F = m * a – Force = mass x acceleration
• T = I * α – Torque = Moment of Inertia x Angular Acceleration
English (abbr) SI (abbr)
Force Pound lb Newton N
Moment Inch Pound in-lb Newton Meter N-m

Pre-Season Workshop – November 2010
12
Free Body Diagram
• BEST way to start a new problem
• Pictorial representation which isolates body from world• Shows all loads acting on a body• Problem can be better understood
We cut through the robot!Forces needed to represent.

Pre-Season Workshop – November 2010
13
Free Body Diagram
• Why this state?• Draw all forces and moments• Solve for reactions
36in36in
Motor & Gearbox attached to robot and arm
Arm
Gripper
Ball
Pre-Season Workshop – November 2010
14
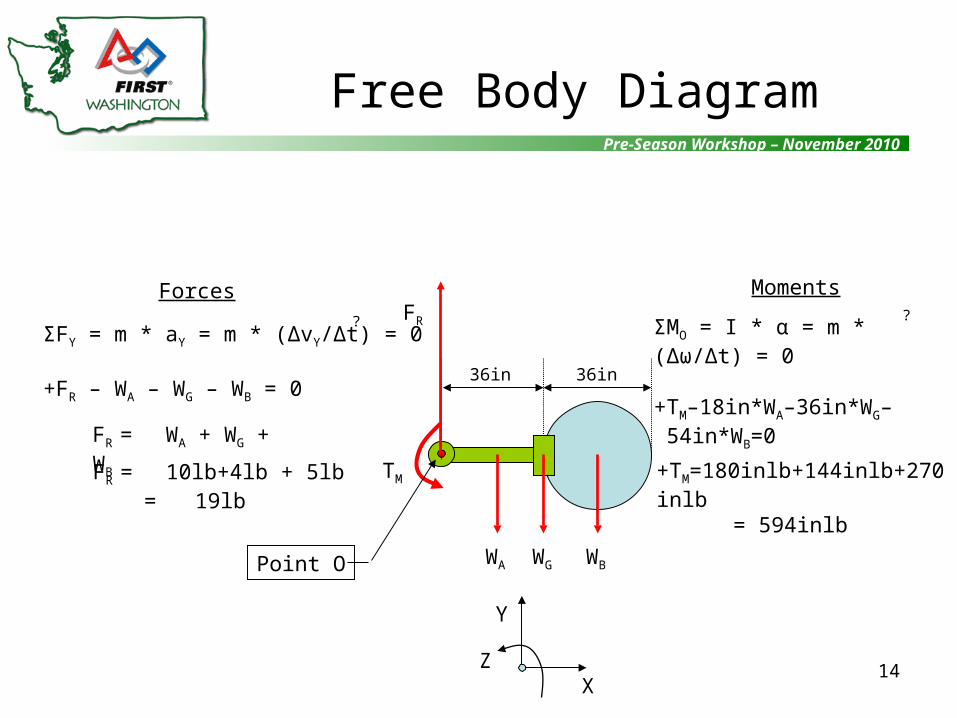
Free Body Diagram
WBWA
36in36in
WG
TM
FRΣFY = m * aY = m * (ΔvY/Δt) = 0
+FR – WA – WG – WB = 0
X
Y
FR = WA + WG + WB
Forces Moments
FR = 10lb+4lb + 5lb = 19lb
ΣMO = I * α = m * (Δω/Δt) = 0
+TM–18in*WA–36in*WG– 54in*WB=0
? ?
Point O
+TM=180inlb+144inlb+270inlb = 594inlb
Z

Pre-Season Workshop – November 2010
15
Question Break
Pre-Season Workshop – November 2010
16
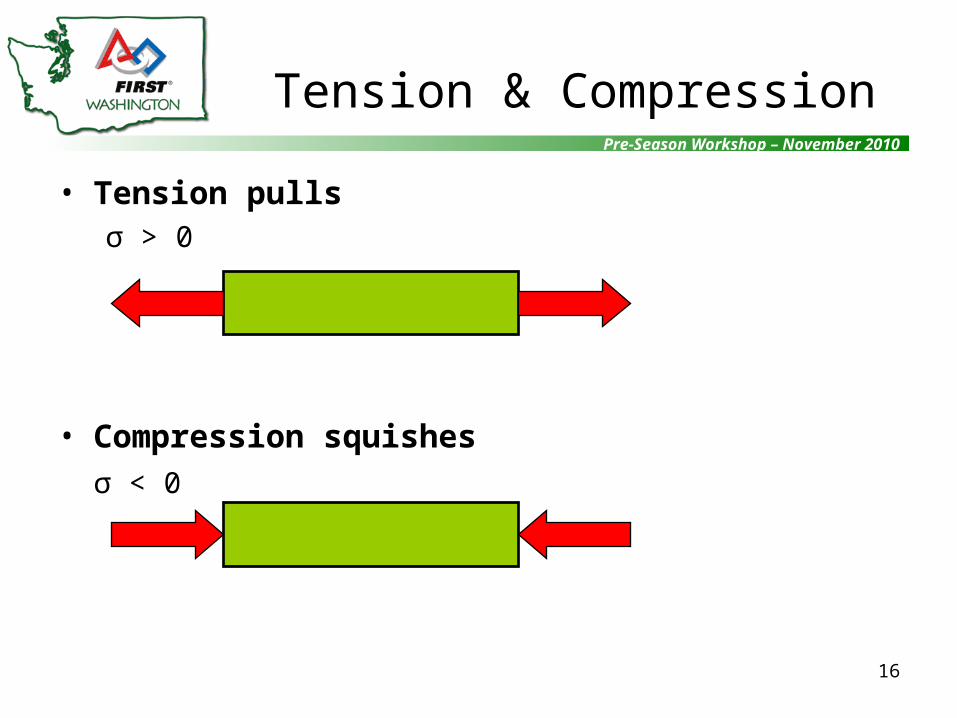
Tension & Compression
• Tension pullsσ > 0
• Compression squishes
σ < 0

Pre-Season Workshop – November 2010
17
Bending
smile
frown
Which portions are in states of tension, compression, or zero stress?

Pre-Season Workshop – November 2010
18
Cross Section Selection
• Intuitively, which cross section is preferred for the arm?
A B C D
Section Cut Here
Neutral axis
E F G
Pre-Season Workshop – November 2010
19
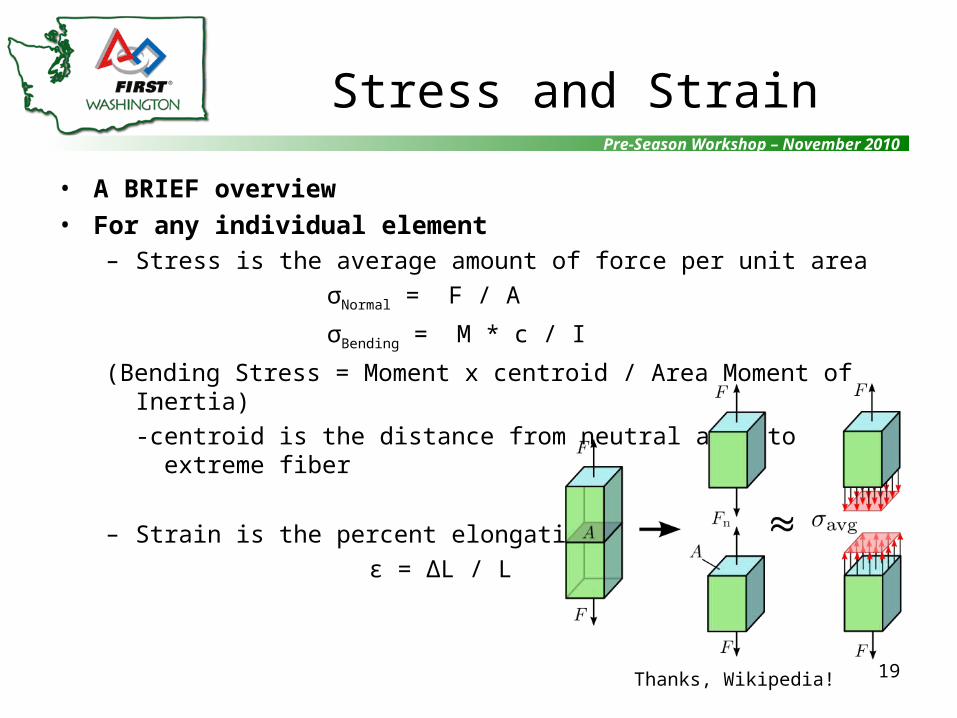
Stress and Strain
• A BRIEF overview• For any individual element
– Stress is the average amount of force per unit area
σNormal = F / A
σBending = M * c / I
(Bending Stress = Moment x centroid / Area Moment of Inertia)
-centroid is the distance from neutral axis to extreme fiber
– Strain is the percent elongation
ε = ΔL / L
Thanks, Wikipedia!
Pre-Season Workshop – November 2010
20
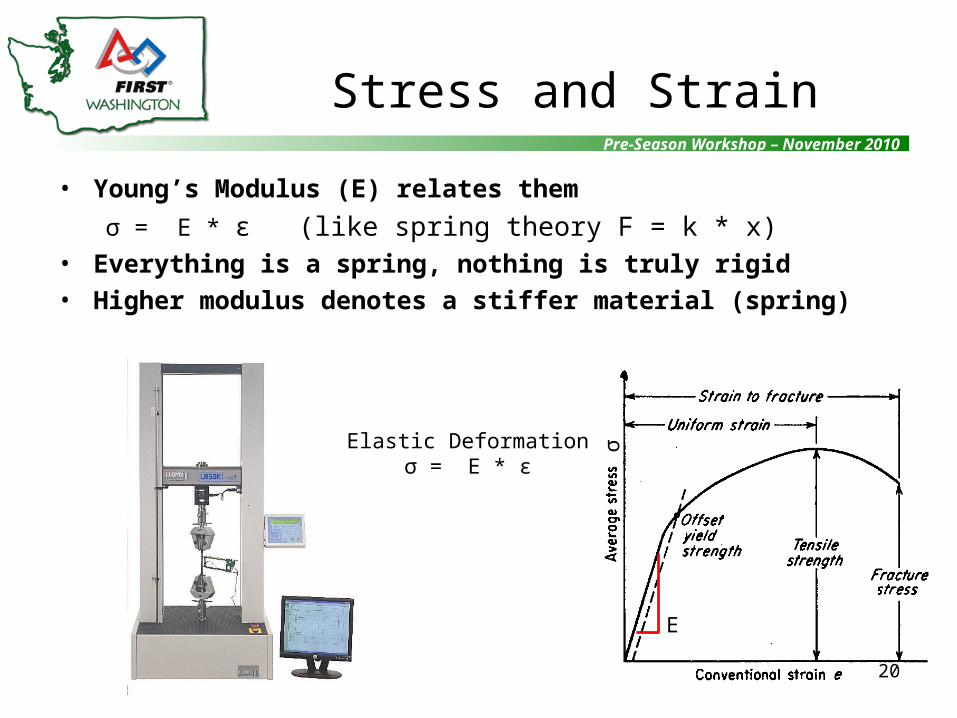
Stress and Strain
• Young’s Modulus (E) relates them
σ = E * ε (like spring theory F = k * x)• Everything is a spring, nothing is truly rigid• Higher modulus denotes a stiffer material (spring)
E
Elastic Deformationσ = E * ε
σ

Pre-Season Workshop – November 2010
21
Material Failure
Tensile Test SpecimenAtomic bonds and dislocations

Pre-Season Workshop – November 2010
22
Material and Gauge Selection
• Determine needed size of elements based on criteria– Displacement– Stress– Strain– Buckling, Crack Propagation, Resonance, etc
• Can predict failure of elements– Way beyond the scope of this workshop

Pre-Season Workshop – November 2010
23
Material Properties
Plastic Wood Aluminum Titanium Steel
E (106psi)
.35 1.9 10 15 29
Density (lb/in3)
.043 .017 .098 .161 .284
Yield (103psi)
9 35 120 50
Ultimate (103psi)
9.5 15 38 130 65
Ult / ρ 220 880 390 810 230
Values are for:Tension conditionPolycarbonate, Air Dried Douglas Fir, 6061-T6 Aluminum, 6-4 Titanium, ASTM-A992 Gr 50 Steel

Pre-Season Workshop – November 2010
24
Question Break

Pre-Season Workshop – November 2010
25
Work
• Work is a measure of energy added to a systemW = F · d
W = T * Θ
– For the Ball, only gravitational energy is added
W = m*g*h
W = 5lb*8 feet = 40 ft-lb = 52 Joules
Is there other work done?

Pre-Season Workshop – November 2010
26
Power
• Power is how fast the work is doneP = dW / dt– Lets say we wanted to raise the ball in 2 seconds
P = 52J / 2s = 26W– This is the average power delivered, for pure height gain– Arm must trace arc, power required isn’t constant for
constant speed– Peak power required is much higher

Pre-Season Workshop – November 2010
27
Motors!

Pre-Season Workshop – November 2010
28
DC Permanent Magnet Motor
T

Pre-Season Workshop – November 2010
29
Motor Properties
• Important Characteristics– ω (speed, in RPM or rot/s)
– T (torque, in N-m)
– P (power, in W)• P = T * ω

Pre-Season Workshop – November 2010
30
Motor Properties
ω0
T
Tstall
ωfree
P
Ppeak
ωfree/2

Pre-Season Workshop – November 2010
31
2009 FRC Motors
QTY Supplier
Reference Voltage on data sheet Gear ratio
Stall torque (Nm)
Stall current (A)
Free speed (rpm)
Free speed (rad/s)
Free current (A)
Peak power, 10.5 V supply (W)
1Nippon-Denso 12 10.6 18.6 84 8.8 1.8 22.0
1 Keyang 12 11.8 19 65 7 0.75 20.1
1Fisher-Price 12 0.5 70 15600 1634 1.25 183.8
2 Globe 10 117:1 17.0 21.58 81 8.5 0.82 55.04 CIM 12 2.4 133 5310 556.1 2.7 337.02 Mabuchi 20 0.1 6.2 16400 1717 0.18 28.2
2Banebots - Mabuchi 12 0.2 37 17500 1833 0.95 108.0
Lets pick one
From our FBD and AnalysisT = 594 inlbs = 67.1 NmPmin = 26 W

Pre-Season Workshop – November 2010
32
Globe Motor Properties
ω0
T
17 Nm
81 rot/s
P
55 W
40.5 – 48.6rot/s
8.5Nm
6.8Nm

Pre-Season Workshop – November 2010
33
Question Break

Pre-Season Workshop – November 2010
34
Gear Types
Spur
Worm Rack and PinionPlanetary
BevelCrossed Helical

Pre-Season Workshop – November 2010
35
Gear Torque and Speed
Ratio = Ndriven = 30 = 0.5 (:1) Ndriver 60
Tdriven = R*Tdriver = 0.5 Tdriver
ωdriven = ωdriver/R = 2 ωdriver

Pre-Season Workshop – November 2010
36
Gear Selection
• 6.8 Nm is available from motor at 60% free speed• 67.1 Nm is needed to raise the arm
• Ratio = Tdriven = 67.1 Nm = 9.9:1 = 10:1
Tdriver 6.8 Nm
~
10:1 may need a very large gearfor a single stage…

Pre-Season Workshop – November 2010
37
Gear Trains
Ratios multiply across gear trains

Pre-Season Workshop – November 2010
38
Solution
Globe Motor selected for worst case10:1 ratio gear trainRaise ball in ~2s
Pre-Season Workshop – November 2010
39
Questions

Pre-Season Workshop – November 2010
40
Extra Statics Problem
d=20mm
50mm
30kN
800mm
A
C
B
600mm
AB 30x50 rectangularBC 20mm rodPinned JointsFind the stress in AB and BC

Pre-Season Workshop – November 2010
41
Free Body Diagram
30kN
0.8m
Cy
B
0.6m
Cx
Ay
Ax
ΣMC = 0 = AX(0.6m) – 30kN(0.8m) AX = +40kN
ΣFX = 0 = AX + CX
CX = -AX CX = -40kN
+
+
ΣFY = 0 = AY + CY – 30kNAY + CY = 30kN
+

Pre-Season Workshop – November 2010
42
Breakout FBD
30kN
Ay
Ax
ΣMB = 0 = -AY(0.8m) = 0 AY = 0
CY = 30kN
+
B
0.8m

Pre-Season Workshop – November 2010
43
2 Force Members
30kN
0.8m
Cy
B
0.6m
Cx
Ay
Ax
CX = -40kNCY = 30kN

Pre-Season Workshop – November 2010
FIRST Robotics Drive Systems
• Importance• Basics• Drive Types• Resources• Traction• Mobility• Speed• Timing• Importance
44

Pre-Season Workshop – November 2010
Importance
The best drive train… is more important than anything else on the
robot meets your strategy goals can be built with your resources rarely needs maintenance can be fixed within 4 minutes is more important than anything else on the
robot45
Pre-Season Workshop – November 2010
Basics
Know your resources Decide after kickoff:
› Speed, power, shifting, mobility Use most powerful motors on drivetrain Don’t drive ½ of your robot… WEIGH IT
DOWN! Break it early Give software team TIME to work Give drivers TIME to drive
46

Pre-Season Workshop – November 2010
Drive Types: 2 wheel drive
47
Caster
DrivenWheel
+ Easy to design+ Easy to build+ Light weight+ Inexpensive+ Agile
- Not much power- Will not do well on ramps- Less able to hold position
Motor(s)Motor(s)
Pre-Season Workshop – November 2010
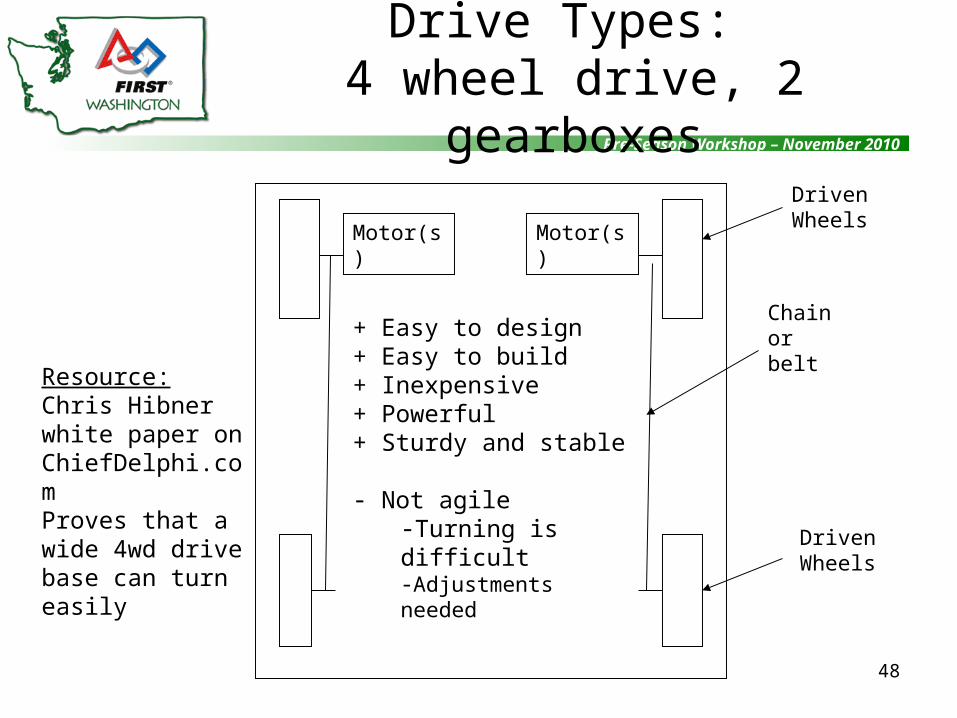
Drive Types: 4 wheel drive, 2 gearboxes
48
Chain or belt
DrivenWheels
+ Easy to design+ Easy to build+ Inexpensive+ Powerful+ Sturdy and stable
- Not agile-Turning is difficult-Adjustments needed
Motor(s)Motor(s)
DrivenWheels
Resource:Chris Hibner white paper on ChiefDelphi.comProves that a wide 4wd drive base can turn easily

Pre-Season Workshop – November 2010
Drive Types: 4 wheel drive, 4 gearboxes
49
DrivenWheels
+ Easy to design+ Easy to build+ Powerful+ Sturdy and stable+ Many options Mecanum, traction
- Heavy- Costly
Motor(s)Motor(s)
DrivenWheels
Motor(s) Motor(s)

Pre-Season Workshop – November 2010
Drive Types: 6 wheel drive, 2 gearboxes
50
Gearbox Gearbox
+ Easy to design+ Easy to build+ Powerful+ Stable+ Agile*
- Heavy **- Expensive **
** - depending on wheel type
*2 ways to be agile
A)Lower contact point on center wheelB)Omni wheels on front or back or both
This is the GOLD STANDARD in FRC
+ simple+ easy+ fast and powerful+ agile

Pre-Season Workshop – November 2010
Drive Types: N wheel drive, 2 gearboxes
51
Gearbox Gearbox
+ Powerful+ Stable+ Agile*
- HEAVY- EXPENSIVE
*2 ways to be agile
A)Lower contact point on center wheelB)Omni wheels on front or back or both
Sole benefit: Ability to go over things

Pre-Season Workshop – November 2010
Drive Types: Tank tread drive, 2 gearboxes
52
Gearbox Gearbox
+ Powerful+ VERY Stable
- NOT AGILE- HEAVY- Inefficient- EXPENSIVE- Hard to maintain For turning, lower the contact
point on center of track wheel
Sole benefit: Ability to go over things
Will NOT push more than a well-controlled 6wd

Pre-Season Workshop – November 2010
Drive Types: 3 wheel
Various types Lightweight Fast Non-standard
› (design intensive)
Examples:› 16 in 2008› 67 in 2005
53
53
Gearbox Gearbox

Pre-Season Workshop – November 2010
Drive Types:Holonomic - Killough
54
4 wheel drive or 3 wheel drive Stephen Killough, 1994
+ Simple Mechanics
+ Immediate Turning
+ Simple Control – 4 wheel independent- No brake- Minimal pushing power- Jittery ride, unless w/ dualies- Incline difficulty

Pre-Season Workshop – November 2010
Drive Types: Mecanum
55
+ Simple mechanisms
+ Immediate turn
+ Simple control – 4 wheel independent- Minimal brake- OK pushing power- Needs a suspension- Difficulty on inclines
Pre-Season Workshop – November 2010
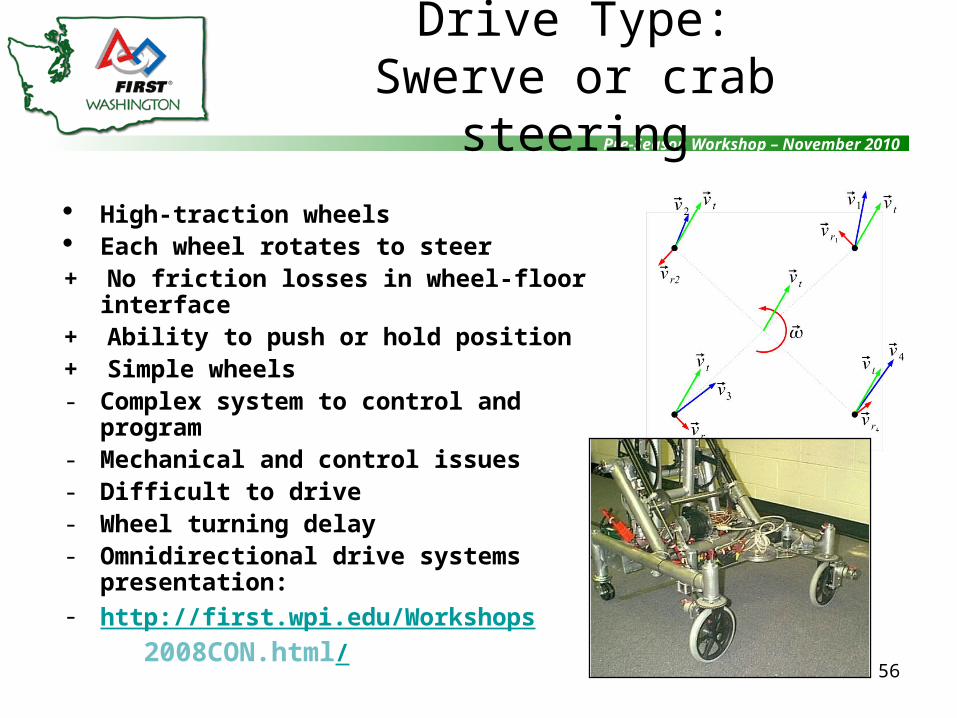
Drive Type:Swerve or crab steering
56
High-traction wheels Each wheel rotates to steer+ No friction losses in wheel-floor interface+ Ability to push or hold position+ Simple wheels- Complex system to control and program- Mechanical and control issues- Difficult to drive- Wheel turning delay- Omnidirectional drive systems
presentation:- http://first.wpi.edu/Workshops
2008CON.html/

Pre-Season Workshop – November 2010
Mobility
57
• Move +/- 1 foot in any direction in under 1 second
• Generally speaking, the more mobile your robot is, the less it can resist a push
More mobile less mobile
Kill
ough
Mec
anum
Swer
ve
6+ w
heel
4wd
long
Tank
Tr
eads
4wd
wid
e

Pre-Season Workshop – November 2010
Traction
58
Static vs Dynamic (10% lower)› Once you slip, you will get pushed› Design encoders into your system› Dynamic breaking & traction control
Pushing force = Weight * › = friction coefficient
Normal Force
(weight)Static friction coefficients = 0.1 = caster (free spinning) = 0.3 = hard plastic = 0.8 = smooth rubber, 80A durometer = 1.0 = sticky rubber, 70A durometer = 1.1 = conveyor treads
Pushing Force

Pre-Season Workshop – November 2010
More on Traction
59
• You can determine
mass Fpull
Fweight
Material w/
Fpull / Fweight
Pre-Season Workshop – November 2010
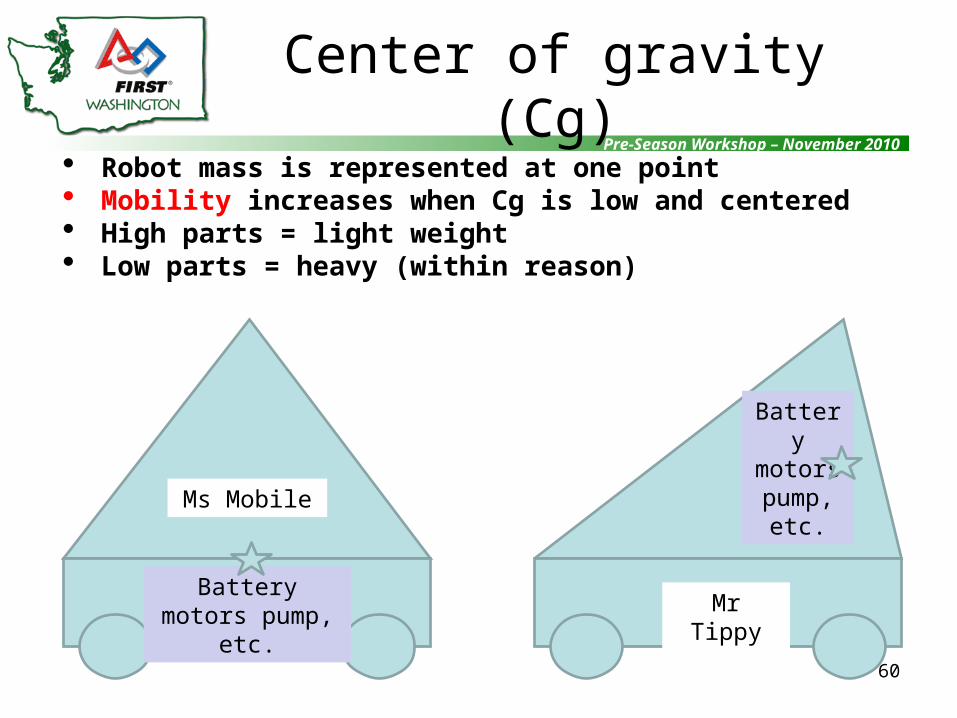
Center of gravity (Cg)
60
Robot mass is represented at one point Mobility increases when Cg is low and centered High parts = light weight Low parts = heavy (within reason)
Battery motors pump,
etc.
Battery motors pump, etc.
Ms Mobile
Mr Tippy

Pre-Season Workshop – November 2010
Speed
• Game dependent, however… this increases every year
• 2008 max: 20 ft/sec
• Controllable top speed: 15 ft/sec
• Average 1-speed rate: 9 ft/sec
• Good pushing speed: 5 ft/sec
61

Pre-Season Workshop – November 2010
Timing
• Get something driving early– End of week 2– Practice for operators– Lessons learned for electrical– Strategy lessons
• Continuously improve– Good enough is not good enough
• Finish final drivetrain by week 4
62

Pre-Season Workshop – November 2010
Importance
Boat anchor = any heavy mass that does not move
A non-reliable or non-repairable drive base will turn your robot into a boat anchor
Good drive bases win consistently Reliable drive bases win awards Well-controlled, robust drive bases win
Championships
63

Pre-Season Workshop – November 2010
Articulating ArmsArticulating Arms
• Shoulder• Elbow• Wrist
64

Pre-Season Workshop – November 2010
Arm: Forces, Angles & TorqueArm: Forces, Angles & Torque
Example: Lifting at different anglesTorque = Force x DistanceSame force, different angle, less torque
65
10 lbs
< D
10 lbs
D

Pre-Season Workshop – November 2010
Arm: Design TipsArm: Design Tips
Lightweight Materials: tubes, thin wall sheetDesign-in sensors for feedback & control
limit switches and potentiometers
Linkages help control long armsKISS
Less parts… to build or breakEasier to operateMore robust
Use off-the-shelf itemsCounterbalance
Spring, weight, pneumatic, etc.66

Pre-Season Workshop – November 2010
Four Bar LinkageFour Bar Linkage
• Pin loadings can be very high• Watch for buckling in lower member• Counterbalance if you can• Keep CG aft• Limited rotation• Keeps gripper in known location
67

Pre-Season Workshop – November 2010
4 bar linkage example: 340 & 4 bar linkage example: 340 & 217 in 2007217 in 2007
68

Pre-Season Workshop – November 2010
Arm Example: 1114 in 2004Arm Example: 1114 in 2004
69

Pre-Season Workshop – November 2010
Telescoping LiftsTelescoping Lifts
Extension LiftMotion achieved by stacked members sliding on each other
Scissor LiftMotion achieved by “unfolding” crossed members
70

Pre-Season Workshop – November 2010
Extension Lift ConsiderationsExtension Lift Considerations
Drive cables up AND down, or add a cable recoil device
Segments must move freelyCable lengths must be adjustableMinimize slop and free-playMaximize segment overlap
20% minimummore for bottom, less for top
Stiffness and strength are neededHeavy system, overlapping partsMinimize weight,
especially at the top
71

Pre-Season Workshop – November 2010
Pink Team 233 - 2008Pink Team 233 - 2008
72
Pre-Season Workshop – November 2010
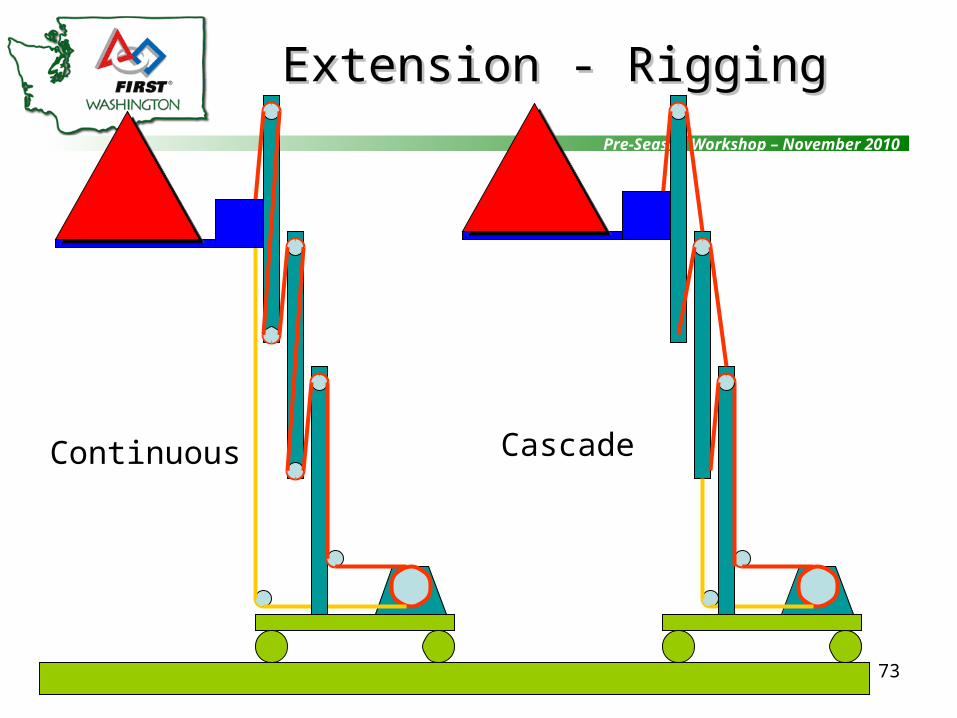
Extension - RiggingExtension - Rigging
73
Continuous Cascade
Pre-Season Workshop – November 2010
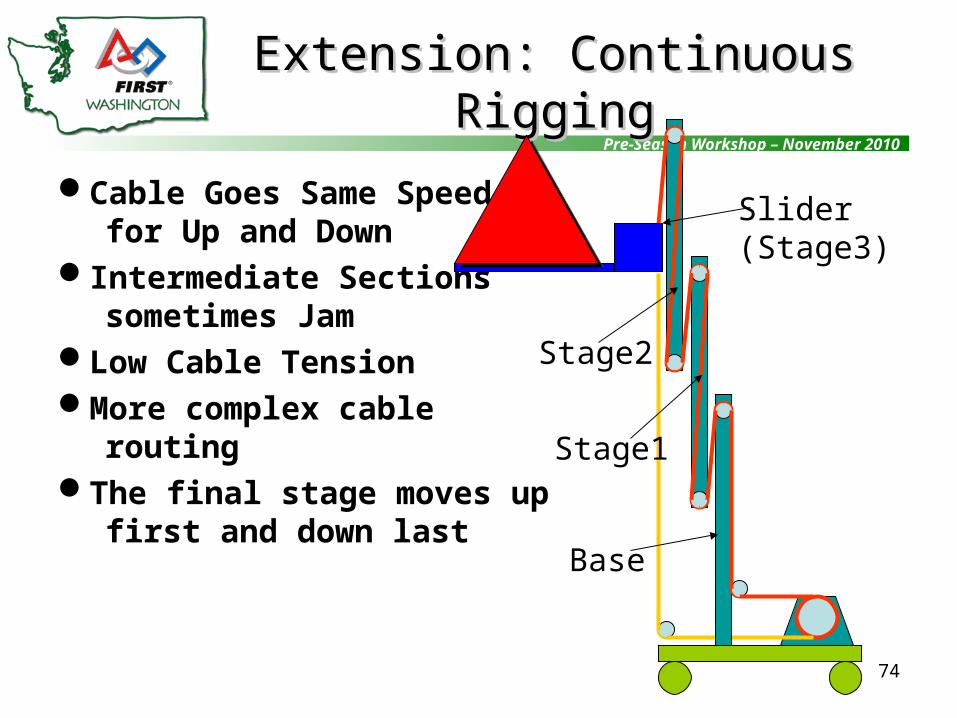
Extension: Continuous RiggingExtension: Continuous Rigging
Cable Goes Same Speed for Up and Down
Intermediate Sections sometimes Jam
Low Cable TensionMore complex cable
routingThe final stage moves up
first and down last
74
Slider(Stage3)
Stage2
Stage1
Base

Pre-Season Workshop – November 2010
Extension: Continuous Extension: Continuous Internal RiggingInternal Rigging
Even More complex cable routing
Cleaner and protected cables
75
Slider(Stage3)
Stage2
Stage1
Base

Pre-Season Workshop – November 2010
Extension: Cascade RiggingExtension: Cascade Rigging
Up-going and Down-going Cables Have Different Speeds
Different Cable SpeedsCan be Handled withDifferent Drum Diameters or Multiple Pulleys
Intermediate SectionsDon’t Jam
Much More Tension on the lower stage cablesNeeds lower gearing to deal
with higher forces
76
Slider(Stage3)
Stage2
Stage1
Base

Pre-Season Workshop – November 2010
Scissor LiftsScissor Lifts
AdvantagesMinimum retracted height –
can go under field barriersDisadvantages
Tends to be heavy to be stable enough
Doesn’t deal well with sideloads
Must be built very preciselyStability decreases as height
increasesLoads very high to raise at
beginning of travelI recommend you stay away
from this!77

Pre-Season Workshop – November 2010
Arm vs. LiftArm vs. Lift
78
FeatureFeature ArmArm LiftLift Reach over objectReach over object YesYes NoNo
Fall over, get upFall over, get up Yes, if strong enoughYes, if strong enough NoNo
Go under barriersGo under barriers Yes, fold downYes, fold down Maybe, limits lift heightMaybe, limits lift height
Center of gravity (Cg)Center of gravity (Cg) Not centralizedNot centralized Centralized massCentralized mass
Small space operationSmall space operation No, needs swing roomNo, needs swing room YesYes
How high?How high? More articulations, more More articulations, more height (difficult)height (difficult)
More lift sections, more More lift sections, more height (easier)height (easier)
ComplexityComplexity ModerateModerate HighHigh
Powerful liftPowerful lift ModerateModerate HighHigh
CombinationCombination Insert 1-stage lift atInsert 1-stage lift at bottom of armbottom of arm

Pre-Season Workshop – November 2010
Braking: Prevent Back-drivingBraking: Prevent Back-driving
79
Ratchet Device - completely lock in one direction in discrete increments - such as used in many winches
Clutch Bearing - completely lock in one direction Brake pads - simple device that squeezes on a
rotating device to stop motion - can lock in both directionsDisc brakes - like those on your carGear brakes - applied to lowest torque gear in gearbox
Dynamic Breaking in electrical components let go when power is lost
Any gearbox that cannot be back-driven alone is probably very inefficient

Pre-Season Workshop – November 2010
Power
SummaryAll motors can lift the same amount (assuming 100% power
transfer efficiencies) - they just do it at different ratesNo power transfer mechanisms are 100% efficient
Inefficiencies (friction losses, binding, etc.)Design in a Safety Factor (2x, 4x)
80

Pre-Season Workshop – November 2010
Design is an Iterative ProcessDesign is an Iterative Process
81
Final Design
Pre-Season Workshop – November 2010
Best Practices 1/2
• Use Gracious Professionalism• KISS – Simplicity wins • Use ALL resources on main concept• Don’t give up on good designs• Look at the game differently• Plan for automode – is it worth it?• Be very good at 1 thing, at least• Drive by end of week 2, but weigh it down!• Make good prototypes
82

Pre-Season Workshop – November 2010
Best Practices 2/2
• Support shafts in two places. No more, no less• Avoid long cantilevered loads• Avoid press fits and friction belting• Alignment, alignment, alignment!• Break it early• Finish early: debug start in week 4• “Good enough” is only OK• Practice, practice, practice• Checklists, checklists, checklists
83

Pre-Season Workshop – November 2010
84
Final Questions?

Pre-Season Workshop – November 2010
85
Thanks
• … Engineering?
– “Scientists investigate that which already is; Engineers create that which has never been.”
Dr. Albert Einstein
– “To the optimist, the glass is half full. To the pessimist, the glass is half empty. To the engineer, the glass is twice as big as it needs to be.”
Unknown