mecanica analitica ii.pdf
TRANSCRIPT

Mecanica Analıtica. Notas de Clase
Alexis Larranaga
18 de febrero de 2015

Indice general
1. Mecanica Newtoniana 61.1. Una Partıcula . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.1.1. Impulso . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71.1.2. Trabajo y Energıa Cinetica . . . . . . . . . . . . . . . . . 71.1.3. Fuerzas Conservativas y Energıa Potencial . . . . . . . . . 81.1.4. Constantes de Movimiento . . . . . . . . . . . . . . . . . . 9
1.1.4.1. Energıa . . . . . . . . . . . . . . . . . . . . . . . 91.1.4.2. Momentum . . . . . . . . . . . . . . . . . . . . . 101.1.4.3. Momentum Angular . . . . . . . . . . . . . . . . 10
1.1.5. Notas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111.2. N-Partıculas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
1.2.1. Posicion del Centro de Masa . . . . . . . . . . . . . . . . 131.2.2. Momentum Lineal Total . . . . . . . . . . . . . . . . . . . 131.2.3. Momento Angular Total . . . . . . . . . . . . . . . . . . . 13
1.2.3.1. Momento Angular y Centro de Masa . . . . . . 151.2.4. Trabajo y Energıa . . . . . . . . . . . . . . . . . . . . . . 17
1.2.4.1. Energıa Cinetica . . . . . . . . . . . . . . . . . . 171.2.4.2. Energıa Cinetica y Centro de Masa . . . . . . . 181.2.4.3. Energıa Potencial . . . . . . . . . . . . . . . . . 191.2.4.4. Conservacion de la Energıa . . . . . . . . . . . . 22
1.2.5. Notas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
2. Formulacion de Lagrange 232.1. Espacio de Configuracion . . . . . . . . . . . . . . . . . . . . . . 23
2.1.1. Una Partıcula . . . . . . . . . . . . . . . . . . . . . . . . . 232.1.2. N�Partıculas . . . . . . . . . . . . . . . . . . . . . . . . . 24
2.2. Ligaduras . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 252.2.1. Espacio de Configuracion Accesible . . . . . . . . . . . . . 26
2.3. Trabajo Virtual . . . . . . . . . . . . . . . . . . . . . . . . . . . . 262.3.1. Desplazamientos Virtuales . . . . . . . . . . . . . . . . . . 262.3.2. Principio del Trabajo Virtual . . . . . . . . . . . . . . . . 272.3.3. Principio de D’Alambert . . . . . . . . . . . . . . . . . . . 28
2.4. Sistemas Holonomos . . . . . . . . . . . . . . . . . . . . . . . . . 292.4.1. Fuerzas Generalizadas . . . . . . . . . . . . . . . . . . . . 30
1

INDICE GENERAL 2
2.5. Fuerzas Conservativas . . . . . . . . . . . . . . . . . . . . . . . . 392.5.1. Potencial Generalizado . . . . . . . . . . . . . . . . . . . . 402.5.2. Fuerza Electromagnetica . . . . . . . . . . . . . . . . . . . 41
2.5.2.1. Potencial generalizado . . . . . . . . . . . . . . . 422.6. Fuerzas no-Conservativas . . . . . . . . . . . . . . . . . . . . . . 442.7. Transformaciones de Coordenadas (Transformacion de punto) . . 462.8. Transformaciones de Calibracion . . . . . . . . . . . . . . . . . . 472.9. Forma General de la Energıa Cinetica . . . . . . . . . . . . . . . 48
2.9.1. Teorema de Euler sobre Funciones Homogeneas . . . . . . 512.10. Cantidades conservadas . . . . . . . . . . . . . . . . . . . . . . . 52
2.10.1. Momentum Conjugado . . . . . . . . . . . . . . . . . . . . 522.10.2. Energıa Generalizada . . . . . . . . . . . . . . . . . . . . 522.10.3. Energıa Mecanica Total . . . . . . . . . . . . . . . . . . . 54
2.11. Teorema de Noether . . . . . . . . . . . . . . . . . . . . . . . . . 632.12. Principio de Hamilton . . . . . . . . . . . . . . . . . . . . . . . . 67
2.12.1. Ecuacion de Euler . . . . . . . . . . . . . . . . . . . . . . 682.12.2. Segunda Forma de la Ecuacion de Euler . . . . . . . . . . 712.12.3. Ecuacion de Euler-Lagrange . . . . . . . . . . . . . . . . . 742.12.4. Transformaciones de Calibracion . . . . . . . . . . . . . . 77
2.13. Extension del Principio de Hamilton para Sistemas no-Holonomos 77
3. Problema de la Fuerza Central 923.1. Cantidades Conservadas . . . . . . . . . . . . . . . . . . . . . . . 94
3.1.1. Lagrangiano en el Plano del Movimiento . . . . . . . . . . 953.1.2. Momento Angular y Ley de la Areas . . . . . . . . . . . . 953.1.3. Energıa y Cuadraturas . . . . . . . . . . . . . . . . . . . . 96
3.2. Trayectorias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 973.2.1. Potencial Efectivo . . . . . . . . . . . . . . . . . . . . . . 973.2.2. Ecuacion de Lagrange Radial . . . . . . . . . . . . . . . . 983.2.3. Simetria de la Trayectoria . . . . . . . . . . . . . . . . . . 1003.2.4. Trayectorias Acotadas . . . . . . . . . . . . . . . . . . . . 101
3.2.4.1. Teorema de Bertrand (Orbitas Cerradas) . . . . 1023.2.5. Ecuacion Diferencial de la Trayectoria . . . . . . . . . . . 104
3.3. Problema de Kepler . . . . . . . . . . . . . . . . . . . . . . . . . 1053.3.1. Periodo de la Orbita Elıptica . . . . . . . . . . . . . . . . 1073.3.2. Energıa . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1083.3.3. Tercera Ley de Kepler . . . . . . . . . . . . . . . . . . . . 1093.3.4. Ecuacion de Kepler . . . . . . . . . . . . . . . . . . . . . . 111
3.4. Dispersion por Campos Centrales . . . . . . . . . . . . . . . . . . 1143.4.1. Seccion Eficaz Diferencial de Dispersion . . . . . . . . . . 1153.4.2. Dispersion de Rutherford . . . . . . . . . . . . . . . . . . 117

INDICE GENERAL 3
4. Cinematica del Cuerpo Rıgido 1214.1. Grados de Libertad . . . . . . . . . . . . . . . . . . . . . . . . . . 1214.2. Transformaciones Ortogonales . . . . . . . . . . . . . . . . . . . . 124
4.2.1. Representacion Matricial . . . . . . . . . . . . . . . . . . 1254.3. Angulos de Euler . . . . . . . . . . . . . . . . . . . . . . . . . . . 1274.4. Teorema de Euler para el Movimiento de un Cuerpo Rigido . . . 129
4.4.1. Transformacion de Similaridad . . . . . . . . . . . . . . . 1324.5. Tensor de Inercia . . . . . . . . . . . . . . . . . . . . . . . . . . . 1334.6. Rotaciones Infinitesimales . . . . . . . . . . . . . . . . . . . . . . 133
4.6.1. El pseudovector d~⌦ . . . . . . . . . . . . . . . . . . . . . . 1354.7. Razon de Cambio de un Vector . . . . . . . . . . . . . . . . . . . 1404.8. Velocidad Angular en terminos de los angulos de Euler . . . . . . 140
4.8.1. Fuerza de Coriolis . . . . . . . . . . . . . . . . . . . . . . 1424.9. Velocidad angular y origen del sistema de coordenadas . . . . . . 143
5. Dinamica del Cuerpo Rıgido 1465.1. Momento Angular del Cuerpo Rıgido . . . . . . . . . . . . . . . . 1465.2. El tensor de Inercia . . . . . . . . . . . . . . . . . . . . . . . . . . 1475.3. Energıa Cinetica de Rotacion . . . . . . . . . . . . . . . . . . . . 1495.4. Diadas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 149
5.4.1. Operaciones Basicas . . . . . . . . . . . . . . . . . . . . . 1505.5. La diada de Inercia . . . . . . . . . . . . . . . . . . . . . . . . . . 1515.6. Momentos de Inercia . . . . . . . . . . . . . . . . . . . . . . . . . 152
5.6.1. Teorema de los Ejes Paralelos . . . . . . . . . . . . . . . . 1535.6.2. Teorema de la Diada de Inercia . . . . . . . . . . . . . . . 155
5.7. Transformacion del Tensor de Inercia a los Ejes Principales . . . 1565.8. Ecuaciones de Euler para el Cuerpo Rıgido . . . . . . . . . . . . 1585.9. Cuerpo Rıgido Libre Simetrico . . . . . . . . . . . . . . . . . . . 1605.10. Construccion de Poinsot . . . . . . . . . . . . . . . . . . . . . . . 164
5.10.1. Elipsoide de Inercia . . . . . . . . . . . . . . . . . . . . . 1645.10.2. Movimiento del Elipsoide . . . . . . . . . . . . . . . . . . 166
6. Aplicaciones 1696.1. Trompo Simetrico Pesado con un Punto Fijo . . . . . . . . . . . 169
6.1.1. Analisis de la Energıa Potencial Efectiva . . . . . . . . . . 1726.1.1.1. Caso Particular (!
3
= 0) . . . . . . . . . . . . . 1726.1.1.2. Caso Particular (!
3
6= 0) . . . . . . . . . . . . . 1726.2. Cilindro en un Plano Inclinado . . . . . . . . . . . . . . . . . . . 1806.3. Lamina con un punto fijo deslizando en un plano horizontal . . . 1856.4. Precesion de Partıculas Cargadas en un campo Magnetico. . . . . 188
7. Formulacion Hamiltoniana 1907.1. Transformaciones de Legendre . . . . . . . . . . . . . . . . . . . . 190
7.1.1. Transformacion de Legendre Total . . . . . . . . . . . . . 1917.1.2. Transformacion de Legendre Parcial . . . . . . . . . . . . 192
7.2. El Hamiltoniano . . . . . . . . . . . . . . . . . . . . . . . . . . . 193

INDICE GENERAL 4
7.3. Derivacion de las Ecuaciones de Hamilton a partir de un PrincipioVariacional . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1987.3.1. Transformaciones de Calibracion . . . . . . . . . . . . . . 199
7.4. Espacio de Fase . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2007.4.1. Teorema de Liouville . . . . . . . . . . . . . . . . . . . . . 203
7.5. Principio de la Mınima Accion . . . . . . . . . . . . . . . . . . . 2057.6. Coordenadas Cıclicas y Metodo de Routh . . . . . . . . . . . . . 207
7.6.1. Metodo de Routh . . . . . . . . . . . . . . . . . . . . . . . 2087.6.1.1. Ecuaciones de Routh . . . . . . . . . . . . . . . 2107.6.1.2. Teoremas de Conservacion . . . . . . . . . . . . 210
7.7. Ecuaciones de Hamilton en Forma Matricial . . . . . . . . . . . . 2107.8. Corchetes de Poisson . . . . . . . . . . . . . . . . . . . . . . . . . 211
7.8.1. Corchetes Fundamentales . . . . . . . . . . . . . . . . . . 2127.9. Ecuaciones de Hamilton y Corchetes de Poisson . . . . . . . . . . 212
7.9.1. Teorema de Poisson . . . . . . . . . . . . . . . . . . . . . 2147.9.2. Corchetes de Poisson en Forma Matricial . . . . . . . . . 214
7.10. Parentesis de Lagrange . . . . . . . . . . . . . . . . . . . . . . . . 215
8. Transformaciones Canonicas 2168.0.1. Caso 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2178.0.2. Caso 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2188.0.3. Caso 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2198.0.4. Caso 4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 220
8.1. El Oscilador Armonico . . . . . . . . . . . . . . . . . . . . . . . . 2238.2. Diferenciales Exactos y Funciones Generadoras de Transforma-
ciones Independientes del Tiempo . . . . . . . . . . . . . . . . . . 2258.2.1. Diferenciales Exactos . . . . . . . . . . . . . . . . . . . . . 2258.2.2. Transformaciones Canonicas y Diferenciales Exactos . . . 228
8.3. Transformaciones Canonicas en Forma Matricial . . . . . . . . . 2348.3.1. Algunas Relaciones Matematicas . . . . . . . . . . . . . . 2348.3.2. Transformaciones de Coordenadas . . . . . . . . . . . . . 2378.3.3. Invariantes . . . . . . . . . . . . . . . . . . . . . . . . . . 239
8.3.3.1. Ecuaciones de Hamilton (Transformaciones In-dependientes del Tiempo) . . . . . . . . . . . . . 239
8.3.3.2. Corchetes de Poisson . . . . . . . . . . . . . . . 2408.3.3.3. Parentesis de Lagrange . . . . . . . . . . . . . . 2418.3.3.4. Integrales de Movimiento de Poincare . . . . . . 2428.3.3.5. Ecuaciones de Hamilton (Transformaciones De-
pendientes del Tiempo) . . . . . . . . . . . . . . 2428.4. Diferenciales Exactos y Funciones Generadoras de Transforma-
ciones Dependientes del Tiempo . . . . . . . . . . . . . . . . . . . 2468.4.1. Diferenciales Exactos . . . . . . . . . . . . . . . . . . . . . 2468.4.2. Transformaciones Canonicas y Diferenciales Exactos con
Dependencia Temporal . . . . . . . . . . . . . . . . . . . . 2498.5. Oscilador Armonico Amortiguado . . . . . . . . . . . . . . . . . . 2528.6. Transformaciones Canonicas Infinitesimales . . . . . . . . . . . . 255

INDICE GENERAL 5
8.6.1. Transformaciones Infinitesimales y Corchetes de Poisson . 2588.6.2. Cambio de una Funcion bajo una Transformacion Canoni-
ca Infinitesimal . . . . . . . . . . . . . . . . . . . . . . . . 2598.6.3. Cambio en el Hamiltoniano bajo una Transformacion Canoni-
ca Infinitesimal . . . . . . . . . . . . . . . . . . . . . . . . 259
9. Teoria de Hamilton-Jacobi 2649.1. Separacion de Variables . . . . . . . . . . . . . . . . . . . . . . . 277
9.1.1. Separacion del tiempo . . . . . . . . . . . . . . . . . . . . 2779.1.2. Separacion de una Coordenada Cıclica . . . . . . . . . . . 278
9.2. Condiciones de Staeckel . . . . . . . . . . . . . . . . . . . . . . . 2819.3. Variables Accion-Angulo . . . . . . . . . . . . . . . . . . . . . . . 281
9.3.1. Sistemas de un Grado de Libertad . . . . . . . . . . . . . 2829.3.2. Sistemas de n Grados de Libertad Completamente Sepa-
rables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2879.4. El Problema de Kepler . . . . . . . . . . . . . . . . . . . . . . . . 289

Capıtulo 1
Mecanica Newtoniana
1.1. Una Partıcula
Para describir el movimiento de una partıcula se utiliza el vector de posicion,denotado por ~r. A partir de el, se definen los vectores velocidad y aceleracionmediante
~v =d~r
dt= ~r (1.1.1)
~a =d~v
dt= ~v. (1.1.2)
Tambien se define el momentum lineal o cantidad de movimiento como
~p = m~v. (1.1.3)
Las leyes de Newton describen la dinamica de la partıcula y pueden resumirsecomo
Ley de Inercia: ~p = cte (1.1.4)
Segunda Ley: ~F =d~p
dt(1.1.5)
Ley de Accion y Reaccion: ~F12
= ~F21
. (1.1.6)
En un sistema de coordenadas cartesianas, la segunda ley de Newton corres-ponde a las ecuaciones
8
>
<
>
:
mx = Fx (x, y, z, x, y, z, t)
my = Fy (x, y, z, x, y, z, t)
mz = Fz (x, y, z, x, y, z, t) .
(1.1.7)
6

CAPITULO 1. MECANICA NEWTONIANA 7
A partir de estas ecuaciones, se puede encontrar la ley de movimiento, esdecir ~r = ~r (t) y a partir de esta, la ecuacion de la trayectoria. Por ejemplo, siel movimiento se realiza en un plano, la ley de movimiento se reduce a
(
x = x (t)
y = y (t)
y la ecuacion de la trayectoria corresponde a la funcion y = y (x) .De forma similar, la segunda ley de Newton se puede plantear en otros
sistemas de coordenadas. Por ejemplo, en un sistema de coordenadas esfericasse tiene
8
>
>
>
<
>
>
>
:
mr = Fr
⇣
r, ✓,', r, ✓, ', t⌘
m✓ = F✓⇣
r, ✓,', r, ✓, ', t⌘
m' = F'⇣
r, ✓,', r, ✓, ', t⌘
.
(1.1.8)
1.1.1. Impulso
Si la fuerza se considera como una funcion del tiempo, i.e. ~F = ~F (t) se tiene
d~p
dt= ~F (t) (1.1.9)ˆ
d~p =
ˆ~F (t) dt (1.1.10)
y con ello se define el impulso como el cambio de momentum,
I = ~p2
� ~p1
=
ˆ t2
t1
~F (t) dt. (1.1.11)
Ahora bien, si la fuerza depende ademas de la posicion y de la velocidad, setiene en general
I = ~p2
� ~p1
=
ˆ t2
t1
~Fh
~r (t) , ~r (t) , ti
dt. (1.1.12)
1.1.2. Trabajo y Energıa Cinetica
El trabajo que una fuerza realiza sobre una partıcula para llevarla desde unpunto 1 hasta un punto 2 se define como
W12
=
ˆ2
1
~F · d~r. (1.1.13)
Si la partıcula no cambia su masa durante el recorrido, i.e. su masa es cons-tante, se puede escribir

CAPITULO 1. MECANICA NEWTONIANA 8
W12
=
ˆ2
1
d~p
dt· d~r = m
ˆ2
1
d~v
dt· d~r = m
ˆ2
1
d~v
dt· ~vdt, (1.1.14)
donde se ha utilizado la definicion de velocidad. Ahora bien, recordando que
dv2
dt=
d (~v · ~v)dt
(1.1.15)
2vdv
dt= 2~v · d~v
dt, (1.1.16)
el trabajo se convierte en
W12
= m
ˆ2
1
vdv
dtdt =
m
2
ˆ2
1
dv2
dtdt =
m
2
ˆ2
1
dv2 (1.1.17)
W12
=1
2m�
v22
� v21
�
. (1.1.18)
Definiendo la Energıa Cinetica de la partıcula como
T =1
2mv2, (1.1.19)
se obtiene el teorema del trabajo-energıa,
W12
= T2
� T1
. (1.1.20)
1.1.3. Fuerzas Conservativas y Energıa Potencial
El trabajo que realiza una fuerza para llevar una partıcula desde un puntoinicial 1 hasta un punto final 2 depende, en general, de la trayectoria que se sigue.Ahora bien, si el trabajo que realiza una fuerza particular es independiente dela trayectoria, se dice que esta fuerza es conservativa. Matematicamente estoequivale a decir que el trabajo a lo largo de cualquier camino cerrado es cero,i.e.
˛~F · d~r = 0. (1.1.21)
Aplicando el teorema de Stokes a esta integral se tiene˛
~F · d~r =
ˆ ˆ⇣
~r⇥ ~F⌘
· d ~A = 0, (1.1.22)
donde ~A es el vector de area para la superficie encerrada por la trayectoriaconsiderada para calcular el trabajo. Con ello se puede concluir que una fuerza~F es conservativa si satisface
~r⇥ ~F = 0. (1.1.23)
CAPITULO 1. MECANICA NEWTONIANA 9
Ya que el rotacional de un gradiente siempre es cero, una fuerza conservativapuede obtenerse a partir de una funcion escalar U mediante
~F = �~rU. (1.1.24)
La funcion U = U (~r, t) se denomina energıa potencial. Ahora bien, si se calculael trabajo que una fuerza conservativa ejerce sobre una partıcula en una trayec-toria no cerrada, y la energıa potencial correspondiente no depende del tiempo,U = U (~r), se puede escribir
W12
=
ˆ2
1
~F · d~r = �ˆ
2
1
~rU · d~r. (1.1.25)
En coordenadas cartesianas, el gradiente se escribe
~rU =
✓
@U
@x,@U
@y,@U
@z
◆
, (1.1.26)
y por ello, el trabajo resulta ser
W12
= �ˆ
2
1
✓
@U
@xdx+
@U
@ydy +
@U
@zdz
◆
(1.1.27)
W12
= �ˆ
2
1
dU (1.1.28)
W12
= U1
� U2
. (1.1.29)
1.1.4. Constantes de Movimiento
1.1.4.1. Energıa
Notese que si la energıa potencial asociada con una fuerza conservativa nodepende del tiempo, el teorema del trabajo energıa permite escribir
W12
= T2
� T1
= U1
� U2
. (1.1.30)
Reordenando terminos,
T1
+ U1
= T2
+ U2
= E, (1.1.31)
donde se ha definido la Energıa Mecanica Total como la suma de energıa cineticay potencial, E = T + U , y resulta ser una constante de movimiento.
Es importante notar que si la energıa potencial depende del tiempo, U =U (~r, t), la energıa mecanica total no se conserva, ya que
@U
@xdx+
@U
@ydy +
@U
@zdz 6= dU (1.1.32)
en la ecuacion (1.1.27).
CAPITULO 1. MECANICA NEWTONIANA 10
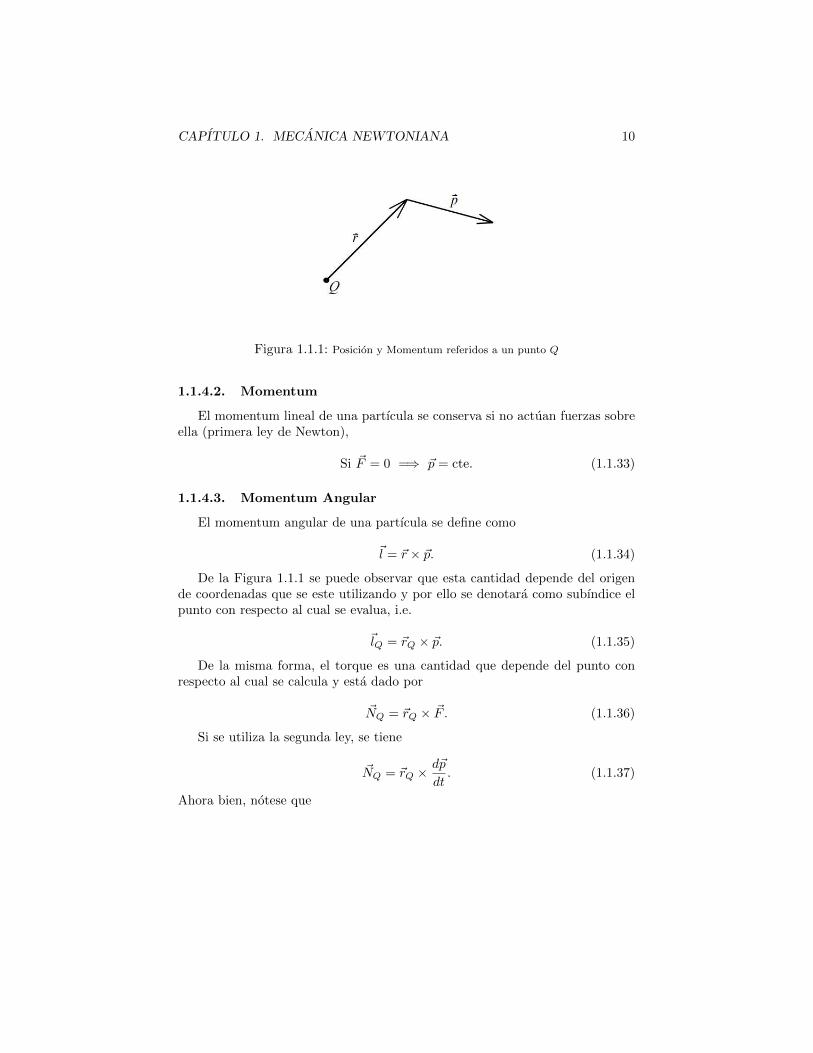
Figura 1.1.1: Posicion y Momentum referidos a un punto Q
1.1.4.2. Momentum
El momentum lineal de una partıcula se conserva si no actuan fuerzas sobreella (primera ley de Newton),
Si ~F = 0 =) ~p = cte. (1.1.33)
1.1.4.3. Momentum Angular
El momentum angular de una partıcula se define como
~l = ~r ⇥ ~p. (1.1.34)
De la Figura 1.1.1 se puede observar que esta cantidad depende del origende coordenadas que se este utilizando y por ello se denotara como subındice elpunto con respecto al cual se evalua, i.e.
~lQ = ~rQ ⇥ ~p. (1.1.35)
De la misma forma, el torque es una cantidad que depende del punto conrespecto al cual se calcula y esta dado por
~NQ = ~rQ ⇥ ~F . (1.1.36)
Si se utiliza la segunda ley, se tiene
~NQ = ~rQ ⇥ d~p
dt. (1.1.37)
Ahora bien, notese que

CAPITULO 1. MECANICA NEWTONIANA 11
d
dt(~r ⇥ ~p) =
d~r
dt⇥ ~p+ ~r ⇥ d~p
dt(1.1.38)
= ~v ⇥ ~p+ ~r ⇥ d~p
dt(1.1.39)
= ~r ⇥ d~p
dt, (1.1.40)
debido a que ~v y ~p son paralelos. Por ello el torque resulta ser
~NQ =d
dt(~rQ ⇥ ~p) = d~lQ
dt. (1.1.41)
Esta ecuacion permite concluir que el momentum angular de una partıculase conserva si no actuan torques sobre ella,
Si ~NQ = 0 =) ~lQ = cte. (1.1.42)
1.1.5. Notas
En una dimension una partıcula que esta sujeta a una enrgıa potencial queno depende del tiempo U = U (x) siente una fuerza dada por
~F = �dU
dxi. (1.1.43)
La relacion entre trabajo y energıa potencial es
�U = �ˆ x2
x1
F (x) dx. (1.1.44)
Si se toma un punto de referencia xref para medir la energıa potencial, se definela funcion energıa potencial en cada punto mediante
U (x) = �ˆ x
xref
F (x0) dx0. (1.1.45)
La energıa mecanica total de la partıcula sera entonces
E =1
2mv2 + U (x) . (1.1.46)
A partir de esta relacion, se puede encontrar
v2 =2
m[E � U (x)] (1.1.47)
dx
dt=
r
2
m[E � U (x)], (1.1.48)

CAPITULO 1. MECANICA NEWTONIANA 12
es decir,dx
q
2
m [E � U (x)]= dt. (1.1.49)
Se dice entonces que el problema se llevo a su primera cuadratura, dada por
r
m
2
ˆ x
x0
dxp
E � U (x)= t� t
0
(1.1.50)
la cual permite, en principio, obtener la ecuacion de movimiento x = x (t).
1.2. N-Partıculas
Si se tiene un sistema de N�partıculas, las fuerzas que actuan sobre una deellas, por ejemplo sobre la i�esima partıcula, se pueden clasificar en:
Furzas externas, denotadas por ~F (E)
i
Fuerzas internas, denotadas por ~Fji con i 6= j. (notese que ~Fii = 0).
La ecuacion de movimiento para la i�esima partıcula sera
d~pidt
= ~F (E)
i +NX
j=1
~Fji. (1.2.1)
Al sumar sobre todas las partıculas del sistema se tiene
NX
i=1
d~pidt
=NX
i=1
~F (E)
i +NX
i=1
NX
j=1
~Fji. (1.2.2)
Debido a la tercera ley de Newton, el ultimo termino de la derecha es cero ypor ello se puede escribir
NX
i=1
d~pidt
= ~F (E), (1.2.3)
donde ~F (E) =PN
i=1
~F (E)
i es la fuerza total externa que actua sobre el sistema.Si la masa de cada una de las partıculas no cambia, esta ecuacion se convierteen
NX
i=1
d~pidt
=NX
i=1
d (mi~vi)
dt=
NX
i=1
mid2~ridt2
= ~F (E) (1.2.4)
d2
dt2
"
NX
i=1
mi~ri
#
= ~F (E). (1.2.5)

CAPITULO 1. MECANICA NEWTONIANA 13
1.2.1. Posicion del Centro de Masa
La posicion del centro de masa se define mediante
~R =
PNi=1
mi~riPN
i=1
mi
=
PNi=1
mi~riM
,
donde M =PN
i=1
mi es la masa total del sistema. De esta forma, la ecuacionde movimiento del sistema (1.2.5) describe el movimiento del centro de masa,
d2
dt2
h
M ~Ri
= ~F (E). (1.2.6)
1.2.2. Momentum Lineal Total
El momentum total del sistema se define en terminos de la masa total delsistema y de la velocidad del centro de masa como
~P = M ~V = Md~R
dt. (1.2.7)
De esta forma, la ecuacion de movimiento del centro de masa resulta ser
d2
dt2
h
M ~Ri
=d
dt
"
Md~R
dt
#
= ~F (E) (1.2.8)
d~P
dt= ~F (E). (1.2.9)
Es decir, que el movimiento del centro de masa depende unicamente delas fuerzas externas que actuan sobre el sistema. Esto permite concluir que sila fuerza total externa que actua sobre un sistema de N�partıculas es cero,entonces su momentum lineal total se conserva,
Si ~F (E) = 0 =) ~P = cte. (1.2.10)
1.2.3. Momento Angular Total
El momento angular medido con respecto a un punto Q para una de laspartıculas del sistema esta dado por
~liQ = ~riQ ⇥ ~pi. (1.2.11)
Si se suma sobre todas las partıculas, se obtiene el momento angular total delsistema,
~lQ =NX
i=1
(~riQ ⇥ ~pi) . (1.2.12)

CAPITULO 1. MECANICA NEWTONIANA 14
Ahora bien, multiplicando la ecuacion (1.2.1) por la posicion ~riQ de lai�esima partıcula se tiene
~riQ ⇥ d~pidt
= ~riQ ⇥ ~F (E)
i + ~riQ ⇥NX
j=1
~Fji, (1.2.13)
que puede re-escribirse como
d
dt(~riQ ⇥ ~pi) = ~riQ ⇥ ~F (E)
i +NX
j=1
⇣
~riQ ⇥ ~Fji
⌘
. (1.2.14)
Al sumar sobre todas las partıculas del sistema se tiene
d
dt
NX
i=1
(~riQ ⇥ ~pi) =NX
i=1
⇣
~riQ ⇥ ~F (E)
i
⌘
+NX
i=1
NX
j=1
⇣
~riQ ⇥ ~Fji
⌘
(1.2.15)
d~lQdt
=NX
i=1
⇣
~riQ ⇥ ~F (E)
i
⌘
+NX
i=1
NX
j=1
⇣
~riQ ⇥ ~Fji
⌘
. (1.2.16)
Definiendo el torque externo total del sistema mediante
~N (E)
Q =NX
i=1
⇣
~riQ ⇥ ~F (E)
i
⌘
, (1.2.17)
se tiene
d~lQdt
= ~N (E)
Q +NX
i=1
NX
j=1
⇣
~riQ ⇥ ~Fji
⌘
. (1.2.18)
La tercera ley de Newton (~Fji = �~Fij) permite escribir
~riQ ⇥ ~Fji + ~rjQ ⇥ ~Fij = ~riQ ⇥ ~Fji � ~rjQ ⇥ ~Fji (1.2.19)
= (~riQ � ~rjQ)⇥ ~Fji. (1.2.20)
Definiendo ~rij = ~riQ � ~rjQ se tiene
~riQ ⇥ ~Fji + ~rjQ ⇥ ~Fij = ~rij ⇥ ~Fji. (1.2.21)
Con esta relacion es posible definir dos variantes para la tercera ley de New-ton. Se dice que la Tercera Ley de Newton Fuerte se cumple si ~rij ⇥ ~Fji = 0.Por otro lado se dice que la Tercera Ley de Newton Debil se cumple aun si~rij ⇥ ~Fji 6= 0. La diferencia entre estas dos versiones de la Tercera Ley se puedecomprender mediante la Figura 1.2.1.

CAPITULO 1. MECANICA NEWTONIANA 15
Figura 1.2.1: a) Fuerzas que obedecen la tercera ley fuerte. b) Fuerzas que obedecenunica-
mente la tercera ley debil.
De esta forma, si el sistema de N�partıculas satisface la tercera ley fuerte,la ecuacion (1.2.18) resulta ser
d~lQdt
= ~N (E)
Q , (1.2.22)
y bajo esta suposicion podemos afirmar que el momento angular total dependeunicamente de los torques externos que actuan sobre el sistema. Esto permiteconcluir que si el torque externo total que actua sobre un sistema de N�partıcu-las es cero, entonces su momentum angular total se conserva,
Si ~N (E)
Q = 0 =) ~lQ = cte. (1.2.23)
Notese que para la conservacion del momentum lineal ~P es necesario quese cumpla solamente la tercera ley debil, mientras que para la conservacion delmomento angular ~l es necesario que se cumpla la tercera ley fuerte.
1.2.3.1. Momento Angular y Centro de Masa
Como se dijo arriba, el momento angular total de un sistema depende delpunto con respecto al cual se calcula. Si se define ~R como la posicion del centrode masa, la posicion de la partıcula mi con respecto al centro de masa, ~r0i, y conrespecto a otro punto Q cualquiera, ~riQ, se relacionan mediante (ver Figura 2.)
~riQ = ~r0i + ~R. (1.2.24)
Derivando con respecto al tiempo se tiene
~viQ = ~v0i + ~V . (1.2.25)
De esta forma, el momento angular total del sistema sera

CAPITULO 1. MECANICA NEWTONIANA 16
Figura 1.2.2: Posicion de una partıcula referida a un punto Q y al centro de masa (CM)
~lQ =NX
i=1
(~riQ ⇥ ~pi) (1.2.26)
=NX
i=1
h⇣
~r0i + ~R⌘
⇥mi
⇣
~v0i + ~V⌘i
(1.2.27)
=NX
i=1
h
~r0i ⇥mi~v0i + ~r0i ⇥mi
~V + ~R⇥mi~v0i + ~R⇥mi
~Vi
. (1.2.28)
Sin embargo, notese que debido a la definicion del centro de masa
NX
i=1
~R⇥mi~v0i = ~R⇥
NX
i=1
mi~v0i = ~R⇥ d
dt
NX
i=1
mi~r0i = 0 (1.2.29)
y tambien
NX
i=1
~r0i ⇥mi~V =
NX
i=1
mi~r0i ⇥ ~V = 0. (1.2.30)
Por ello, el momento angular total del sistema resulta ser

CAPITULO 1. MECANICA NEWTONIANA 17
~lQ =NX
i=1
h
~r0i ⇥mi~v0i + ~R⇥mi
~Vi
(1.2.31)
=NX
i=1
(~r0i ⇥mi~v0i) + ~R⇥
NX
i=1
mi
!
~V (1.2.32)
=NX
i=1
(~r0i ⇥ ~p0i) + ~R⇥M ~V (1.2.33)
=NX
i=1
(~r0i ⇥ ~p0i) + ~R⇥ ~P . (1.2.34)
El primer termino puede identificarse como el momento angular total medidocon respecto al centro de masa, por lo que se tiene finalmente
~lQ = ~l0 + ~R⇥ ~P . (1.2.35)
1.2.4. Trabajo y Energıa
El trabajo realizado sobre un sistema de N�partıculas puede escribirse comola superposicion de los trabajos hechos sobre cada una de las partıculas,
W12
=NX
i=1
ˆ2
1
~Fi · d~ri (1.2.36)
W12
=NX
i=1
ˆ2
1
2
4
~F (E)
i · d~ri +NX
j=1
~Fji · d~ri3
5 , (1.2.37)
donde el primer termino representa las contribuciones de las fuerzas externas yel segundo termino las contribuciones de las fuerzas internas.
1.2.4.1. Energıa Cinetica
La ecuacion (1.2.36) se puede reescribir como
W12
=NX
i=1
ˆ2
1
~Fi · d~ri =NX
i=1
ˆ2
1
mi~ iv · d~ri =NX
i=1
mi
ˆ2
1
~ iv · ~vidt. (1.2.38)
Utilizando el resultado ~v · ~v = vv, mostrado antes, se tiene
W12
=NX
i=1
mi
ˆ2
1
vividt =NX
i=1
mi
ˆ2
1
vidvi (1.2.39)

CAPITULO 1. MECANICA NEWTONIANA 18
W12
=NX
i=1
1
2mi v
2
i
�
�
2
1
. (1.2.40)
Definiendo la energıa cinetica del sistema como
T =NX
i=1
1
2miv
2
i (1.2.41)
se obtiene el teorema del trabaj-energıa para un sistema de N�partıculas,
W12
= T2
� T1
. (1.2.42)
1.2.4.2. Energıa Cinetica y Centro de Masa
Considerando de nuevo el centro de masa y un punto cualquiera Q, las po-siciones y velocidades se relacionan mediante las ecuaciones (1.2.24) y (1.2.51).Con ello, la energıa cinetica del sistema medida con respecto al punto Q se puedereescribir como
T =NX
i=1
1
2miv
2
iQ =NX
i=1
1
2mi
⇣
~v0i + ~V⌘
·⇣
~v0i + ~V⌘
(1.2.43)
T =NX
i=1
1
2mi
h
v02i + 2~v0i · ~V + V 2
i
. (1.2.44)
Sin embargo, debido a la definicion del centro de masa,
NX
i=1
1
2mi
⇣
2~v0i · ~V⌘
=
NX
i=1
mi~v0i
!
· ~V = 0. (1.2.45)
De esta forma, la energıa cinetica es
T =NX
i=1
1
2miv
02i +
NX
i=1
1
2miV
2 (1.2.46)
T =NX
i=1
1
2miv
02i +
1
2MV 2. (1.2.47)
El primer termino en esta expresion es la energıa cinetica del sistema medidacon respecto al centro de masa, mientras que el segundo termino corresponde ala energıa cinetica del Centro de Masa.

CAPITULO 1. MECANICA NEWTONIANA 19
1.2.4.3. Energıa Potencial
Si las fuerzas externas que actuan sobre un sistema son todas del tipo con-servativo se pueden definir las energıas potenciales correspondientes y escribir
NX
i=1
ˆ2
1
~F (E)
i · d~ri = �NX
i=1
ˆ2
1
~riUi · d~ri. (1.2.48)
En coordenadas cartesianas se tiene
NX
i=1
ˆ2
1
~F (E)
i · d~ri = �NX
i=1
ˆ2
1
@Ui
@xidxi +
@Ui
@yidyi +
@Ui
@zidzi
�
. (1.2.49)
Si las energıas potenciales no dependen del tiempo, dUi =@U
i
@xi
dxi +@U
i
@yi
dyi +@U
i
@zi
dzi, y con ello
NX
i=1
ˆ2
1
~F (E)
i · d~ri = �NX
i=1
ˆ2
1
dUi, (1.2.50)
es decir
NX
i=1
ˆ2
1
~F (E)
i · d~ri = �NX
i=1
Ui
�
�
�
�
�
2
1
. (1.2.51)
Por otro lado, si las fuerzas internas ~Fji son conservativas se pueden escribiren terminos de funciones de energıa potencial,
~Fji = �~riUji. (1.2.52)
Si se cumple la tercera ley fuerte, se tiene
~Fji = �~riUji = ~rjUij = �~Fij , (1.2.53)
per para que esto sea cierto debe cumplirse
Uji = Uij . (1.2.54)
Con ello, concluimos que la energıa potencial Uji dependera unicamente dela distancia entre las partıculas involucradas en la interaccion, esto es
Uji = Uji (|~rj � ~ri|) = Uji (s) , (1.2.55)
donde
s =q
(xj � xi)2 + (yj � yi)
2 + (zj � zi)2. (1.2.56)

CAPITULO 1. MECANICA NEWTONIANA 20
EjemploSi consideramos el caso particular
U21
= U12
= U = s2 = (x2
� x1
)2 + (y2
� y1
)2 + (z2
� z1
)2
se tiene
~F21
= �~r1
U21
= �✓
@U
@x1
i+@U
@y1
j +@U
@z1
k
◆
= �2h
(x2
� x1
) i+ (y2
� y1
) j + (z2
� z1
) ki
~F21
= �2 (~r2
� ~r1
) .
De forma similar,
~F12
= �~r2
U12
= �✓
@U
@x2
i+@U
@y2
j +@U
@z2
k
◆
= 2h
(x2
� x1
) i (y2
� y1
) j + (z2
� z1
) ki
~F12
= 2 (~r2
� ~r1
) .
Con ello, se comprueba que en este caso particular
~F21
= �~r1
U21
= �2 (~r2
� ~r1
) = ~r2
U12
= �~F12
.
De esta forma, en el trabajo hecho por las fuerzas internas apareceran parejasde terminos de la forma
ˆ2
1
~Fji · d~ri +ˆ
2
1
~Fij · d~rj .
Si estas fuerzas son conservativas y se cumple la tercera ley fuerte, se tiene

CAPITULO 1. MECANICA NEWTONIANA 21
ˆ2
1
~Fji · d~ri +ˆ
2
1
~Fij · d~rj = �ˆ
2
1
~riUji · d~ri �ˆ
2
1
~rjUij · d~rj
= �ˆ
2
1
~riUji · d~ri +ˆ
2
1
~riUji · d~rj
= �ˆ
2
1
~riUji · (d~ri � d~rj) . (1.2.57)
Definiendo ~rij = ~ri � ~rj , se puede escribir
ˆ2
1
~Fji · d~ri +ˆ
2
1
~Fij · d~rj = �ˆ
2
1
~riUji · d~rij . (1.2.58)
Ahora bien, si se define el operador diferencial ~rij con derivadas con respecto a
xij = xi � xj
yij = yi � yj
zij = zi � zj ,
se tiene
~rijUji = ~riUji = �~rjUji. (1.2.59)
De esta forma,
ˆ2
1
~Fji · d~ri +ˆ
2
1
~Fij · d~rj = �ˆ
2
1
~rijUji · d~rij , (1.2.60)
y si las energias potenciales no dependen del tiempo,
ˆ2
1
~Fji · d~ri +ˆ
2
1
~Fij · d~rj = �ˆ
2
1
dUji = � Uji|21
. (1.2.61)
El trabajo hecho por las fuerzas internas se obtiene al sumar sobre todaslas contribuciones que tienen esta forma. por ello, teniendo en cuenta que noexisten contribuciones con i = j y ademas que en la suma aparecen las parejasde terminos descritas, se obtiene
X
i 6=j
~Fji · d~ri = �1
2
X
i 6=j
Uji
�
�
�
�
�
�
2
1
. (1.2.62)
La Energıa Potencial del sistema se obtiene sumando las energias potencialesdebidas a las fuerzas externas (1.2.51) y las debidas a las fuerzas internas,
U |21
=NX
i=1
Ui
�
�
�
�
�
2
1
+1
2
X
i 6=j
Uji
�
�
�
�
�
�
2
1
. (1.2.63)

CAPITULO 1. MECANICA NEWTONIANA 22
1.2.4.4. Conservacion de la Energıa
A partir del teorema de trabajo-energıa (1.2.42) se tiene
W12
= T2
� T1
(1.2.64)
y de la ecuacion (1.2.36),
W12
= � U |21
= �NX
i=1
Ui
�
�
�
�
�
2
1
� 1
2
X
i 6=j
Uji
�
�
�
�
�
�
2
1
. (1.2.65)
Por lo tanto
W12
= T2
� T1
= U1
� U2
, (1.2.66)
con lo que se puede definir la cantidad conservada denominada energıa mecanicatotal,
E = T1
+ U1
= T2
+ U2
. (1.2.67)
1.2.5. Notas
En el caso particular del cuerpo rıgido la distancia entre las diferentes par-ticulas es siempre constante, esto es
rij = constante (1.2.68)
y ya que
~rij · ~rij = r2ij = cte. (1.2.69)
entonces
~rij · d~rij = 0. (1.2.70)
Con ello podemos concluir que
~Fij · d~rij = 0, (1.2.71)
es decir que para el cuerpo rıgido, las fuerzas internas no hacen trabajo.
Capıtulo 2
Formulacion de Lagrange
2.1. Espacio de Configuracion
2.1.1. Una Partıcula
Como es conocido, para describir la posicion de una partıcula se necesitantres numeros, (x
1
, x2
, x3
). Si se esta trabajando con un sistema de coordenadascartesiano los tres numeros son las coordenadas (x, y, z) y con ello la posicionestara dada por el vector
~r = xi+ yj + zk. (2.1.1)
Si se trabaja en coordenadas esfericas, los tres numeros que definen la posi-cion de la partıcula son las coordenadas (r, ✓,'). Existe una relacion entre losdos sitemas de coordenadas dada por
8
>
<
>
:
x = r sin ✓ cos'
y = r sin ✓ sin'
z = r cos ✓
(2.1.2)
o por su inversa
8
>
>
<
>
>
:
r =p
x2 + y2 + z2
✓ = tan�1
�
yx
�
' = tan�1
✓px2
+y2
z
◆
.
(2.1.3)
En general, si se utiliza el conjunto de coordenadas (x1
, x2
, x3
) y otro con-junto (q
1
, q2
, q3
) denominadas coordenadas generalizadas, se puede escribir larelacion entre los dos sistemas como
xi = xi (q1, q2, q3, t) con i = 1, 2, 3. (2.1.4)
La transformacion inversa
23

CAPITULO 2. FORMULACION DE LAGRANGE 24
qj = qj (x1
, x2
, x3
, t) con j = 1, 2, 3 (2.1.5)
existe si el jacobiano tiene un determinante diferente de cero, i.e.
det |J | = det
�
�
�
�
�
�
�
@x1@q1
@x1@q2
@x1@q3
@x2@q1
@x2@q2
@x2@q3
@x3@q1
@x3@q2
@x3@q3
�
�
�
�
�
�
�
6= 0, (2.1.6)
o en notacion mas corta
det |J | = det
�
�
�
�
@xi
@qj
�
�
�
�
6= 0. (2.1.7)
2.1.2. N�PartıculasPara describir la posicion de N�partıculas se necesitan 3N numeros
x1
, x2
, x3
, ..., x3N
o N vectores,
~r1
,~r2
, ...,~rN . (2.1.8)
En general, se puede definir un conjunto de coordenadas generalizadas, re-lacionadas mediante la transformacion
xi = xi (q1, q2, ..., q3N , t) con i = 1, 2, ..., 3N. (2.1.9)
De nuevo, la transformacion inversa
qj = qj (x1
, x2
, ..., x3N , t) con j = 1, 2, ..., 3N (2.1.10)
existe si el jacobiano tiene un determinante diferente de cero, i.e.
det |J | = det
�
�
�
�
@xi
@qj
�
�
�
�
6= 0. (2.1.11)
Estas transformaciones tambien se pueden escribir en forma vectorial
~ri = ~ri (q1, q2, ..., q3N , t) con i = 1, 2, ..., N. (2.1.12)
El espacio de configuracion es aquel espacio que permite describir la posiciondel sistema de N�partıculas. Por lo tanto es un espacio de 3N dimensiones, yel estado del sistema se da por una 3N�upla,
{x1
, x2
, ..., x3N} 2 R3N (2.1.13)
{q1
, q2
, ..., q3N} 2 R3N . (2.1.14)

CAPITULO 2. FORMULACION DE LAGRANGE 25
Ahora bien, si para el instante t = 0 el sistema se encuentra en la configura-cion
~x (t = 0) = {(x1
)0
, (x2
)0
, ..., (x3N )
0
}entonces la Ley de Muto establece que para un tiempo posterior su configuracionestara dada por
~x (t) = {x1
(t) , x2
(t) , ..., x3N (t)} .
2.2. Ligaduras
Las ligaduras son restricciones geometricas o cinematicas que limitan el mo-vimiento del sistema. Algunos ejemplos son
Ligaduras GeometricasLigaduras Cinematicas
Adx+Bdy + Cdz +Ddt = 0. (2.2.1)
Las ligaduras geometricas dependen unicamente de la posicion y del tiempoy se clasifican en ligaduras holonomas cuando pueden escribirse como
h (~x, t) = 0 (2.2.2)
y ligaduras no-holonomas si se escriben como
h (~x, t) � 0. (2.2.3)
Las ligaduras cinematicas dependen de la posicion, de la velocidad y deltiempo. Tambien se clasifican en ligaduras holonomas si pueden escribirse como
h⇣
~x, ~x, t⌘
= 0 (2.2.4)
y ligaduras no-holonomas si se escriben como
h⇣
~x, ~x, t⌘
� 0. (2.2.5)
Si una ligadura depende explıcitamente del tiempo,
@h
@t6= 0 (2.2.6)
se dice que esta es una ligadura reonoma. Por otro lado, si una ligadura NOdepende explıcitamente del tiempo,
@h
@t= 0 (2.2.7)
se dice que esta es una ligadura escleronoma.

CAPITULO 2. FORMULACION DE LAGRANGE 26
2.2.1. Espacio de Configuracion Accesible
La existencia de ligaduras restringe el espacio de configuracion de un siste-ma ya que los estados posibles son solo aquellos que satisfacen las ligaduras.Matematicamente, el espacio de configuracion accesible sera
�
~x 2 R3N�~x sean compatibles con las ligaduras
. (2.2.8)
En general, esto hace que el espacio de configuracion accesible tenga una dimen-sion 3N .
Dos dificultades que se introducen al considerar ligaduras son1. Las ligaduras hacen que las coordenadas xi no son todas independientes2. Las fuerzas de ligadura son desconocidas (es decir que son nuevas incog-
nitas)Para resolver la primera dificultad se utilizan las coordenadas generalizadas,
ya que estas pueden definirse de tal forma que todas ellas sean independientes.
EjemploN�partıculas �!Espacio de Configuracion: R3N
ligaduras holonomasDimension del espacio de configuracion accesible: 3N � {x
1
, x2
, ..., x3N}: no todas son independientes
{q1
, q2
, ..., q3N�}: todas son independientes
Transformacion de coordenadas:~ri = ~ri (q1, q2, ..., q3N�, t) con i = 1, 2, ..., N
Las ligaduras no-holonomas no permiten eliminar coordenadas. Usualmenteeste tipo de ligaduras se resuelven (integran) despues de solucionar el problema.
2.3. Trabajo Virtual
2.3.1. Desplazamientos Virtuales
Suponga que ahora se tiene un sistema con:N�partıculas �!Espacio de Configuracion: R3N
l ligaduras geometricas holonomasm ligaduras cinematicas holonomas = l +m ligaduras holonomas en totalLas ligaduras se pueden escribir como
(
h↵ (x1
, ..., x3N , t) = 0 con ↵ = 1, 2, 3, ..., l
h� (x1
, ..., x3N,x1
, ..., , x3N , t) = 0 con � = 1, 2, 3, ...,m.
(2.3.1)
CAPITULO 2. FORMULACION DE LAGRANGE 27
Si las ligaduras cinematicas se escriben de la forma
3NX
i=1
ai� (x1
, ..., x3N , t) xi + b� (x1
, ..., x3N , t) = 0, (2.3.2)
entonces
(
P
3Ni=1
@h↵
@xi
xi +@h
↵
@t = 0 con ↵ = 1, ..., lP
3Ni=1
ai� (x1
, ..., x3N , t) xi + b� (x1
, ..., x3N , t) = 0 con � = 1, ...,m.
(2.3.3)Estas constituyen relaciones entre las velocidades. Una configuracion de
velocidad esta dada por
~x = {x1
, x2
, ..., x3N} (2.3.4)
la cual se puede escribir como
~xdt = d~x, (2.3.5)
donded~x = {dx
1
, dx2
, ..., dx3N} (2.3.6)
corresponde a los desplazamientos posibles para el sistema. De esta forma seobtiene
(
P
3Ni=1
@h↵
@xi
dxi +@h
↵
@t dt = 0P
3Ni=1
ai�dxi + b�dt = 0.(2.3.7)
Ahora bien, si se considera un instante de tiempo fijo, t = tfijo estas condi-ciones seran
(
P
3Ni=1
@h↵
@xi
�xi = 0P
3Ni=1
ai��xi = 0,(2.3.8)
donde los �xi se denominan desplazamientos virtuales.
2.3.2. Principio del Trabajo Virtual
N�partıculas �!Espacio de Configuracion: R3N
ligaduras holonomas en totalSobre la partıcula j�esima actua una fuerza total ~Fj . La segunda ley asegura
que
~Fj = mj~rj . (2.3.9)
Ahora bien, la fuerza total puede descomponenrse en fuerzas aplicadas y fuerzasde ligadura,

CAPITULO 2. FORMULACION DE LAGRANGE 28
~Fj = ~F (a)j + ~fj , (2.3.10)
y por ello
~F (a)j + ~fj = mj~rj . (2.3.11)
Si el sistema se encuentra en equilibrio, ~Fj = 0 para j = 1, 2, ..., N , el trabajovirtual sobre cada partıcula sera cero. Esto es
�Wj = ~Fj · �~rj = 0. (2.3.12)
Si estos trabajos virtuales se suman, se obtiene el trabajo virtual total del sis-tema,
W =NX
j=1
~Fj · �~rj = 0
W =NX
j=1
⇣
~F (a)j + ~fj
⌘
· �~rj = 0
W =NX
j=1
~F (a)j · �~rj +
NX
j=1
~fj · �~rj = 0.
Se dice que las ligaduras del sistema son ideales si sus correspondientesfuerzas no hacen trabajo. Un ejemplo claro de este tipo de fuerzas es la normal.A partir de este momento, se asumira que todas las ligaduras consideradas sonideales, y por ello, si el trabajo total es nulo,
(
PNj=1
~fj · �~rj = 0PN
j=1
~F (a)j · �~rj = 0 =
P
3Ni=1
F (a)i �xi.
(2.3.13)
Notese que la segunda ecuacion no implica que las fuerzas aplicadas sean ceroya que los �~rj no son todos independientes.
De esta forma, es posible enunciar el principio del trabajo virtual como:La configuracion ~x
0
= {(x1
)0
, (x2
)0
, ..., (x3N )
0
} representa un sistema enequilibrio si y solo si la suma de los trabajos virtuales de las fuerzas aplicadasen dicha configuracion (y compatibles con la configuracion) es igual a cero.
2.3.3. Principio de D’Alambert
El principio de D’Alambert asegura que,Cualquier configuracion de un sistema en un instante dado puede conside-
rarse como una configuracion de equilibrio si se tienen en cuenta, ademas delas fuerzas aplicadas, las fuerzas de inercia.
Si se consideran las fuerzas de inercia, el trabajo virtual para un sistema conligaduras ideales sera

CAPITULO 2. FORMULACION DE LAGRANGE 29
NX
j=1
⇣
~F (a)j �mj~rj
⌘
· �~rj = 0 =3NX
i=1
⇣
F (a)i �mixi
⌘
�xi. (2.3.14)
Los �xi (es decir los �~rj) no son todos independientes ya que existen = l+mrelaciones de ligadura, dadas por
(
P
3Ni=1
@h↵
@xi
�xi = 0 con ↵ = 1, ..., lP
3Ni=1
ai��xi = 0, con � = 1, ...,m(2.3.15)
es decir que existen solamente 3N� desplazamientos virtuales independientes.
2.4. Sistemas Holonomos
Suponga que se tiene un sistema conN�partıculas �!Espacio de Configuracion: R3N
ligaduras geometricas holonomas, escritas de la forma
h↵ (~x, t) = 0 con ↵ = 1, ..., (2.4.1)
Los grados de libertad del sistema son n = 3N � (en general n 3N).Se definen n coordenadas generalizadas, q
1
, q2
, ..., qn. De esta forma, la con-figuracion del sistema se puede escribir como
~x = {x1
, ..., x3N} 2 R3N (2.4.2)
o como
~q = {q1
, ..., qn} 2 Rn. (2.4.3)
La transformacion de coordenadas que relaciona estas dos representacionesse puede escribir como
~rj = ~rj (q1, ..., qn, t) con j = 1, ..., N (2.4.4)
o como
xi = xi (q1, ..., qn, t) con i = 1, ..., 3N. (2.4.5)
De esta forma se tiene
xi =nX
k=1
@xi
@qkqk +
@xi
@t(2.4.6)
donde las qk se denominan velocidades generalizadas.Ahora bien, ya que
xi =@xi
@q1
q1
+ ...+@xi
@qnqn +
@xi
@t(2.4.7)

CAPITULO 2. FORMULACION DE LAGRANGE 30
es claro que
@xi
@qk=@xi
@qk. (2.4.8)
Por otro lado, a partir de la ecuacion (2.4.6), se puede escribir
dxi =nX
k=1
@xi
@qkdqk +
@xi
@tdt (2.4.9)
y por ello, considerando un instante de tiempo fijo, se obtiene una relacion entrelos desplazamientos virtuales �xi y �qk,
�xi =nX
k=1
@xi
@qk�qk. (2.4.10)
2.4.1. Fuerzas Generalizadas
Utilizando la relacion (2.4.10), el trabajo virtual de las fuerzas aplicadas sera
3NX
i=1
F (a)i �xi =
3NX
i=1
F (a)i
nX
k=1
@xi
@qk�qk =
nX
k=1
"
3NX
i=1
F (a)i
@xi
@qk
#
�qk. (2.4.11)
Al termino entre parentesis se le denomina fuerza generalizada,
Qk =3NX
i=1
F (a)i
@xi
@qk, (2.4.12)
o tambien
Qk =NX
j=1
~F (a)j · @~rj
@qk. (2.4.13)
De esta forma, el trabajo virtual de las fuerzas aplicadas sera
3NX
i=1
F (a)i �xi =
nX
k=1
Qk�qk. (2.4.14)
Por otro lado, el trabajo virtual de las fuerzas de inercia es
3NX
i=1
mixi�xi =3NX
i=1
mixi
nX
k=1
@xi
@qk�qk =
nX
k=1
"
3NX
i=1
mixi@xi
@qk
#
�qk. (2.4.15)
Ahora bien,

CAPITULO 2. FORMULACION DE LAGRANGE 31
d
dt
✓
xi@xi
@qk
◆
= xi@xi
@qk+ xi
d
dt
✓
@xi
@qk
◆
. (2.4.16)
Ademas,
d
dt
✓
@xi
@qk
◆
=nX
l=1
@
@ql
✓
@xi
@qk
◆
ql +@
@t
✓
@xi
@qk
◆
(2.4.17)
d
dt
✓
@xi
@qk
◆
=nX
l=1
@
@qk
✓
@xi
@ql
◆
ql +@
@qk
✓
@xi
@t
◆
(2.4.18)
d
dt
✓
@xi
@qk
◆
=@
@qk
"
nX
l=1
@xi
@qlql +
@xi
@t
#
(2.4.19)
d
dt
✓
@xi
@qk
◆
=@xi
@qk. (2.4.20)
Reemplazando esta relacion en (2.4.16) se obtiene
d
dt
✓
xi@xi
@qk
◆
= xi@xi
@qk+ xi
@xi
@qk, (2.4.21)
es decir
xi@xi
@qk=
d
dt
✓
xi@xi
@qk
◆
� xi@xi
@qk. (2.4.22)
Utilizando la ecuacion (2.4.8) en el primer termino de la derecha,
xi@xi
@qk=
d
dt
✓
xi@xi
@qk
◆
� xi@xi
@qk(2.4.23)
xi@xi
@qk=
d
dt
✓
1
2
@x2
i
@qk
◆
� 1
2
@x2
i
@qk. (2.4.24)
Al reemplazar esta expresion en la ecuacion para el trabajo virtual de lasfuerzas de inercia, (2.4.14), se tiene
3NX
i=1
mixi�xi =nX
k=1
3NX
i=1
mi
d
dt
✓
1
2
@x2
i
@qk
◆
� 1
2
@x2
i
@qk
�
�qk (2.4.25)
3NX
i=1
mixi�xi =nX
k=1
3NX
i=1
d
dt
✓
@
@qk
✓
1
2mix
2
i
◆◆
� @
@qk
✓
1
2mix
2
i
◆�
�qk (2.4.26)
3NX
i=1
mixi�xi =nX
k=1
"
d
dt
@
@qk
3NX
i=1
1
2mix
2
i
!
� @
@qk
3NX
i=1
1
2mix
2
i
#
�qk. (2.4.27)

CAPITULO 2. FORMULACION DE LAGRANGE 32
Identificando la energıa cinetica,
T =3NX
i=1
1
2mix
2
i , (2.4.28)
el trabajo virtual de las fuerzas de inercia es
3NX
i=1
mixi�xi =nX
k=1
d
dt
✓
@T
@qk
◆
� @T
@qk
�
�qk. (2.4.29)
A partir del principio de D’Alambert (2.3.14), los trabajos virtuales (2.4.14)y (2.4.29) dan finalmente
3NX
i=1
⇣
F (a)i �mixi
⌘
�xi =nX
k=1
Qk�qk �nX
k=1
d
dt
✓
@T
@qk
◆
� @T
@qk
�
�qk = 0 (2.4.30)
nX
k=1
Qk � d
dt
✓
@T
@qk
◆
+@T
@qk
�
�qk = 0. (2.4.31)
Ya que los desplazamientos virtuales en las coordenadas generalizadas, �qk, sontodos independientes se concluye que
Qk � d
dt
✓
@T
@qk
◆
+@T
@qk= 0, (2.4.32)
con lo que se obtienen finalmente las Ecuaciones de Lagrange de Primera Espe-cie,
d
dt
✓
@T
@qk
◆
� @T
@qk= Qk, (2.4.33)
con k = 1, 2, ..., n.
EjemploPendulo Simple

CAPITULO 2. FORMULACION DE LAGRANGE 33
Pendulo Simple
Espacio de Configuracion: R3
Ligaduras
(
z = 0
x2 + y2 = l2
Grados de Libertad: n = 3N � = 3� 2 = 1Coordenada Generalizada: q = ✓Transformacion de coordenadas:
x = l cos ✓
y = l sin ✓.
De esta forma, las velocidades seran
x = l✓ sin ✓
y = l✓ cos ✓.
La energıa cinetica es
T =1
2m�
x2 + y2�
=1
2m
✓
⇣
�l✓ sin ✓⌘
2
+⇣
l✓ cos ✓⌘
2
◆
T =1
2ml2✓2.
Por otro lado, la fuerza generalizada viene dada por
Q✓ = ~F (a) · @~r@✓
,
donde la fuerza aplicada es el peso,
~F (a) = mgi,
y ya que
~r = l cos ✓i+ l sin ✓j
entonces
@~r
@✓= �l sin ✓i+ l cos ✓j.
De esta forma,
Q✓ =⇣
mgi⌘
·⇣
�l sin ✓i+ l cos ✓j⌘

CAPITULO 2. FORMULACION DE LAGRANGE 34
Q✓ = �mgl sin ✓.
Por otro lado, se tienen las derivadas
@T
@✓= 0
@T
@✓= ml2✓
d
dt
✓
@T
@✓
◆
= ml2✓.
De esta forma, la ecuacion de Lagrange resulta ser
d
dt
✓
@T
@✓
◆
� @T
@✓= Q✓
ml2✓ = �mgl sin ✓
✓ +g
lsin ✓ = 0.
Desplazamientos virtuales en el pendulo simple.
En la Figura 3a. puede observarse la representacion de un desplazamien-to virtual �x y su relacion con el desplazamiento virtual de la coordenadageneralizada �✓. Con ello se nota inmediatamente que el trabajo virtual sera
�W = �mg�x
�W = �mgl sin ✓�✓.
El termino que acompana a �✓ corresponde a la fuerza generalizada, es decirQ✓ = �mgl sin ✓.

CAPITULO 2. FORMULACION DE LAGRANGE 35
EjemploPendulo Compuesto
Pendulo Compuesto
Numero de Partıculas: 2Espacio de Configuracion: R6
Ligaduras
8
>
>
>
<
>
>
>
:
z1
= 0
z2
= 0
x2
1
+ y21
= l21
(x2
� x1
)2 + (y2
� y1
)2 = l22
Grados de Libertad: n = 3N � = 6� 4 = 2
Coordenadas Generalizadas:
(
q1
= ✓1
q2
= ✓2
Transformacion de coordenadas:
8
>
<
>
:
x1
= l1
cos ✓1
y1
= l1
sin ✓1
z1
= 08
>
<
>
:
x2
= l2
cos ✓2
+ l1
cos ✓1
y2
= l2
sin ✓2
+ l1
sin ✓1
z2
= 0
De esta forma, las velocidades seran
8
>
<
>
:
x1
= �l1
✓1
sin ✓1
y1
= l1
✓1
cos ✓1
z1
= 08
>
<
>
:
x2
= �l2
✓2
sin ✓2
� l1
✓1
sin ✓1
y2
= l2
✓2
cos ✓2
+ l1
✓1
cos ✓1
z2
= 0

CAPITULO 2. FORMULACION DE LAGRANGE 36
La energıa cinetica es
T =1
2m
1
�
x2
1
+ y21
+ z21
�
+1
2m
2
�
x2
2
+ y22
+ z22
�
T =1
2m
1
l21
✓21
+1
2m
2
⇣
l21
✓21
+ l22
✓22
+ 2l1
l2
cos (✓1
� ✓2
) ✓1
✓2
⌘
T =1
2(m
1
+m2
) l21
✓21
+1
2m
2
l22
✓22
+m2
l1
l2
cos (✓1
� ✓2
) ✓1
✓2
Por otro lado, las fuerzas generalizadas vienen dadas por
(
Q1
= ~F (a)1
· @~r1@✓1+ ~F (a)
2
· @~r2@✓1
Q2
= ~F (a)1
· @~r1@✓2+ ~F (a)
2
· @~r2@✓2
donde las fuerzas aplicadas son los pesos,
~F (a)1
= m1
gi
~F (a)2
= m2
gi
y ya que
~r1
= l1
cos ✓1
i+ l1
sin ✓1
j
~r2
= (l2
cos ✓2
+ l1
cos ✓1
) i+ (l2
sin ✓2
+ l1
sin ✓1
) j
entonces
@~r1
@✓1
= �l1
sin ✓1
i+ l1
cos ✓1
j
@~r1
@✓2
= 0
@~r2
@✓1
= �l1
sin ✓1
i+ l1
cos ✓1
j
@~r2
@✓2
= �l2
sin ✓2
i+ l2
cos ✓2
j
De esta forma,

CAPITULO 2. FORMULACION DE LAGRANGE 37
Q1
=⇣
m1
gi⌘
·⇣
�l1
sin ✓1
i+ l1
cos ✓1
j⌘
+⇣
m2
gi⌘
·⇣
�l1
sin ✓1
i+ l1
cos ✓1
j⌘
Q1
= � (m1
+m2
) gl1
sin ✓1
,
y
Q2
=⇣
m1
gi⌘
· (0) +⇣
m2
gi⌘
·⇣
�l2
sin ✓2
i+ l2
cos ✓2
j⌘
Q2
= �m2
gl2
sin ✓2
.
Por otro lado, se tienen las derivadas
@T
@✓1
= �m2
l1
l2
sin (✓1
� ✓2
) ✓1
✓2
@T
@✓1
= (m1
+m2
) l21
✓1
+m2
l1
l2
cos (✓1
� ✓2
) ✓2
ddt
⇣
@T@ ˙✓1
⌘
=
(m1
+m2
) l21
✓1
+m2
l1
l2
h
cos (✓1
� ✓2
) ✓2
� sin (✓1
� ✓2
) ✓2
⇣
✓1
� ✓2
⌘i
.
De esta forma, la primera ecuacion de Lagrange resulta ser
d
dt
✓
@T
@✓1
◆
� @T
@✓1
= Q1
(m1 +m2) l21 ✓1+m2l1l2 cos (✓1 � ✓2) ✓2+m2l1l2 sin (✓1 � ✓2) ✓
22 = � (m1 +m2) gl1 sin ✓1
De forma similar se tiene
@T
@✓2
= m2
l1
l2
sin (✓1
� ✓2
) ✓1
✓2
@T
@✓2
= m2
l22
✓2
+m2
l1
l2
cos (✓1
� ✓2
) ✓1
ddt
⇣
@T@ ˙✓2
⌘
= m2
l22
✓2
+m2
l1
l2
h
cos (✓1
� ✓2
) ✓1
� sin (✓1
� ✓2
) ✓1
⇣
✓1
� ✓2
⌘i
.
Ası, la segunda ecuacion de Lagrange resulta ser
d
dt
✓
@T
@✓2
◆
� @T
@✓2
= Q2
m2
l22
✓2
+m2
l1
l2
cos (✓1
� ✓2
) ✓1
�m2
l1
l2
sin (✓1
� ✓2
) ✓21
= �m2
gl2
sin ✓2
.

CAPITULO 2. FORMULACION DE LAGRANGE 38
Desplazamientos virtuales en el pendulo compuesto
En las Figuras puede observarse la representacion de los desplazamientosvirtuales �x
1
y �x2
, al igual que su relacion con los desplazamientos virtualesde las coordenadas generalizadas, �✓
1
y �✓2
. Con ello, es inmediato que lostrabajos virtuales seran
�W2
= �m2
g�x2
�W2
= �m2
gl2
sin ✓2
�✓2
�W1
= �m1
g�x1
�m2
g�x1
�W1
= �m1
gl1
sin ✓1
�✓1
�m2
gl1
sin ✓1
�✓1
�W1
= � (m1
+m2
) gl1
sin ✓1
�✓1
.
Los terminos que acompanan a los �✓ corresponden a las fuerzas generali-zadas, es decir
Q2
= �m2
gl2
sin ✓2
Q1
= � (m1
+m2
) gl1
sin ✓1
.
Caso Particular.Notese que en el caso particular de masas iguales, m
1
= m2
= m, ycuerdas del mismo tamano, l
1
= l2
= l, las ecuaciones de Lagrange paraeste sistema se reducen a
(
2ml2✓1
+ml2 cos (✓1
� ✓2
) ✓2
+ml2 sin (✓1
� ✓2
) ✓22
= �2mgl sin ✓1
ml2✓2
+ml2 cos (✓1
� ✓2
) ✓1
�ml2 sin (✓1
� ✓2
) ✓21
= �mgl sin ✓2
Si se asumen pequenas oscilaciones, i.e. se desprecian ordenes cuadrati-cos y superiores,

CAPITULO 2. FORMULACION DE LAGRANGE 39
sin ✓i ⇡ ✓i
cos ✓i ⇡ 1
✓1
✓2
⇡ 0
✓2i ⇡ 0,
las ecuaciones se reducen a
(
✓1
+ 1
2
✓2
= � gl ✓1
✓2
+ ✓1
= � gl ✓2.
2.5. Fuerzas Conservativas
Si todas las fuerzas aplicadas son del tipo conservativo, i.e. se pueden escribiren terminos de una funcion potencial V = V (x
1
, ..., x3N , t) de la forma
~F (a)j = �~rjV, (2.5.1)
entonces el trabajo virtual de las fuerzas aplicadas sera
Qk =NX
j=1
~F (a)j · @~rj
@qk= �
NX
j=1
~rjV · @~rj@qk
(2.5.2)
o tambien,
Qk = �3NX
i=1
@V
@xi
@xi
@qk(2.5.3)
Qk = � @V@qk
. (2.5.4)
De esta forma, la ecuacion de Lagrange para el sistema sera
d
dt
✓
@T
@qk
◆
� @T
@qk= Qk = � @V
@qk(2.5.5)
d
dt
✓
@T
@qk
◆
� @ (T � V )
@qk= 0. (2.5.6)
Ahora bien, ya que el potencial no depende de las velocidades generalizadas qk,se puede escribir
d
dt
✓
@ (T � V )
@qk
◆
� @ (T � V )
@qk= 0. (2.5.7)

CAPITULO 2. FORMULACION DE LAGRANGE 40
Ası, si se define la funcion de Lagrange o Lagrangiano, mediante
L = T � V, (2.5.8)
se obtiene la Ecuacion de Lagrange de Segunda Especie,
d
dt
✓
@L
@qk
◆
� @L
@qk= 0. (2.5.9)
EjemploPendulo CompuestoYa que las fuerzas involucradas en este ejemplo son conservativas, se
puede definir el potencial total del sistema, el cual sera la suma de lospotenciales de cada una de las dos partıculas,
V = V1
+ V2
con
V1
= m1
g (l1
+ l2
� l1
cos ✓1
) (2.5.10)
V2
= m2
g (l1
+ l2
� l1
cos ✓1
� l2
cos ✓2
) . (2.5.11)
La ecuacion (2.5.4) permite calcular las fuerzas generalizadas como
Q1
= � @V@✓
1
= � (m1
gl1
sin ✓1
+m2
gl1
sin ✓1
)
Q1
= � (m1
+m2
) gl1
sin ✓1
y
Q2
= � @V@✓
2
= � (m2
gl2
sin ✓2
)
Q2
= �m2
gl2
sin ✓2
.
2.5.1. Potencial Generalizado
La ecuacion de Lagrange de segunda especie se puede escribir tambien enterminos de un potencial generalizado, U = U (q, q, t), de tal forma que el la-grangiano sea
L = T � U. (2.5.12)
Si este es el caso, la ecuacion de Lagrange sera,

CAPITULO 2. FORMULACION DE LAGRANGE 41
d
dt
✓
@L
@qk
◆
� @L
@qk= 0 (2.5.13)
d
dt
✓
@T
@qk
◆
� d
dt
✓
@U
@qk
◆
� @T
@qk+@U
@qk= 0, (2.5.14)
y de acuerdo con la ecuacion de Lagrange de primera especie, podemos escribirfinalmente
d
dt
✓
@T
@qk
◆
� @T
@qk=
d
dt
✓
@U
@qk
◆
� @U
@qk= Qk. (2.5.15)
2.5.2. Fuerza Electromagnetica
Para ilustrar el analisis de fuerzas conservativas, se considerara el caso delcampo electromagnetico, representado por las conocidas ecuaciones de Maxwell,
~r · ~E = 4⇡⇢ (2.5.16)
~r · ~B = 0 (2.5.17)
~r⇥ ~E = �1
c
@ ~B
@t(2.5.18)
~r⇥ ~B =4⇡
c~J +
1
c
@ ~E
@t, (2.5.19)
y la ecuacion de movimiento (Fuerza de Lorentz),
~F = q
~E +1
c~v ⇥ ~B
�
. (2.5.20)
La ecuacion (2.5.17) dice que la divergencia de ~B siempre es cero, y por elloel campo magnetico puede escribirse como el rotacional de un potencial vectorial~A,
~B = ~r⇥ ~A. (2.5.21)
Reemplazando esta expresion en la ecuacion (2.5.18), se tiene
~r⇥ ~E = �1
c
@
@t
⇣
~r⇥ ~A⌘
(2.5.22)
~r⇥ ~E = �1
c~r⇥ @ ~A
@t(2.5.23)
~r⇥
~E +1
c
@ ~A
@t
!
= 0. (2.5.24)

CAPITULO 2. FORMULACION DE LAGRANGE 42
Esta ecuacion asegura que el termino entre parentesis siempre tiene un rotacionalnulo, y por ello esta expresion puede escribirse como el gradiente de un potencialescalar �,
~E +1
c
@ ~A
@t= �~r�. (2.5.25)
Tanto el potencial vectorial como el escalar son, en general, funciones de laposicion y del tiempo,
~A = ~A (x, y, z, t) (2.5.26)
� = � (x, y, z, t) . (2.5.27)
La fuerza de Lorentz se puede escribir en terminos de los potenciales,
~F = q
"
�~r�� 1
c
@ ~A
@t+
1
c~v ⇥
⇣
~r⇥ ~A⌘
#
. (2.5.28)
2.5.2.1. Potencial generalizado
Para identificar el potencial generalizado consideraremos la componente xde la fuerza de Lorentz,
Fx = q
�@�@x� 1
c
@Ax
@t+
1
c
h
~v ⇥⇣
~r⇥ ~A⌘i
x
�
. (2.5.29)
El ultimo termino del lado derecho resulta serh
~v ⇥⇣
~r⇥ ~A⌘i
x= vy
⇣
~r⇥ ~A⌘
z� vz
⇣
~r⇥ ~A⌘
y, (2.5.30)
y ya que las componentes y y z del rotacional de ~A son
⇣
~r⇥ ~A⌘
y=
@Ax
@z� @Az
@x(2.5.31)
⇣
~r⇥ ~A⌘
z=
@Ay
@x� @Ax
@y, (2.5.32)
se tiene
h
~v ⇥⇣
~r⇥ ~A⌘i
x= vy
✓
@Ay
@x� @Ax
@y
◆
� vz
✓
@Ax
@z� @Az
@x
◆
(2.5.33)
h
~v ⇥⇣
~r⇥ ~A⌘i
x= y
@Ay
@x� y
@Ax
@y� z
@Ax
@z+ z
@Az
@x. (2.5.34)
Si se considera la derivada total de Ax con respecto al tiempo,

CAPITULO 2. FORMULACION DE LAGRANGE 43
dAx
dt=@Ax
@xx+
@Ax
@yy +
@Ax
@zz +
@Ax
@t(2.5.35)
�@Ax
@yy � @Ax
@zz = �dAx
dt+@Ax
@xx+
@Ax
@t, (2.5.36)
se tiene
h
~v ⇥⇣
~r⇥ ~A⌘i
x= y
@Ay
@x+ z
@Az
@x� dAx
dt+@Ax
@xx+
@Ax
@t. (2.5.37)
Esta expresion se puede escribir como
h
~v ⇥⇣
~r⇥ ~A⌘i
x= x
@Ax
@x+ y
@Ay
@x+ z
@Az
@x� dAx
dt+@Ax
@t(2.5.38)
h
~v ⇥⇣
~r⇥ ~A⌘i
x=
@
@x(xAx + yAy + zAz)� dAx
dt+@Ax
@t(2.5.39)
h
~v ⇥⇣
~r⇥ ~A⌘i
x=
@
@x
⇣
~v · ~A⌘
� dAx
dt+@Ax
@t. (2.5.40)
De esta forma, la componente x de la fuerza de Lorentz toma la forma
Fx = q
�@�@x� 1
c
@Ax
@t+
1
c
@
@x
⇣
~v · ~A⌘
� dAx
dt+@Ax
@t
��
(2.5.41)
Fx = q
"
@
@x
~v · ~Ac� �
!
� 1
c
dAx
dt
#
. (2.5.42)
Por otro lado, ya que ~v · ~A = xAx + yAy + zAz, se tiene
@⇣
~v · ~A⌘
@x= Ax, (2.5.43)
y por lo tanto
�1
c
dAx
dt= �1
c
d
dt
2
4
@⇣
~v · ~A⌘
@x
3
5 . (2.5.44)
Ası se obtiene
Fx = q
2
4
@
@x
~v · ~Ac� �
!
� 1
c
d
dt
0
@
@⇣
~v · ~A⌘
@x
1
A
3
5 (2.5.45)

CAPITULO 2. FORMULACION DE LAGRANGE 44
y ya que � no depende de las velocidades, se puede introducir esta funcion enel segundo termino,
Fx = q
"
@
@x
~v · ~Ac� �
!
� d
dt
@
@x
~v · ~Ac� �
!!#
(2.5.46)
o mejor
Fx =d
dt
✓
@
@x
⇣
q�� q
c~v · ~A
⌘
◆
� @
@x
⇣
q�� q
c~v · ~A
⌘
. (2.5.47)
Si se compara esta expresion con la ecuacion (2.5.15),
Fx =d
dt
✓
@U
@x
◆
� @U
@x, (2.5.48)
se puede identificar el potencial generalizado electromagnetico como
U = q�� q
c~v · ~A. (2.5.49)
Finalmente, el Lagrangiano de una partıcula cargada en un campo electro-magnetico sera
L =1
2mv2 � q�+
q
c~v · ~A. (2.5.50)
2.6. Fuerzas no-Conservativas
Si ademas de fuerzas conservaticvas, existen fuerzas aplicadas no-conservativas(i.e. que no provienen de un potencial), la ecuacion de Lagrange puede genera-lizarse mediante
d
dt
✓
@L
@qk
◆
� @L
@qk= Qk (2.6.1)
donde Qk representa las fuerzas generalizadas que no provienen de potenciales.
EjemploFuerza de FriccionSi se considera una fuerza de friccion que depende de la velocidad, esta
se puede modelar de la forma
~f = �⇣
bxvxi+ byvy j + bzvz k⌘
Aun cuando esta fuerza no se puede obtener a partir de una funcion poten-cial, si es posible definir la funcion de disipacion de Rayligh,
F =1
2
X
i
�
bxx2
i + by y2
i + bz z2
i
�
,

CAPITULO 2. FORMULACION DE LAGRANGE 45
a partir de la cual se puede definir la fuerza de friccion como
~fi = �~r~vF = �⇣
bxxii+ by yij + bz zik⌘
.
De esta forma, la fuerza generalizada asociada con la fuerza de friccionpuede escribirse como
Qk =NX
j=1
~F (a)j · @~rj
@qk= �
NX
j=1
~r~vF · @~rj@qk
Qk = �NX
j=1
~r~vF · @~rj@qk
Qk = � @F@qk
.
De esta forma, la ecuacion de Lagrange toma la forma
d
dt
✓
@L
@qk
◆
� @L
@qk= � @F
@qk.
Por otro lado, el trabajo hecho en contra de la fuerza de friccion tambienpuede escribirse en terminos de F . Para ello notese que
dW = �X
i
~fi · d~ri = �X
i
~fi · ~vidt
dW = �X
i
⇣
bxxii+ by yij + bz zik⌘
·⇣
xii+ yij + zik⌘
dt (2.6.2)
dW = �X
i
�
bxx2
i + by y2
i + bz z2
i
�
dt (2.6.3)
es decir
dW = �2Fdt, (2.6.4)
o
dW
dt= �2F . (2.6.5)

CAPITULO 2. FORMULACION DE LAGRANGE 46
2.7. Transformaciones de Coordenadas (Trans-formacion de punto)
Considere un transformacion que lleva del conjunto de coordenadas gene-ralizadas qk al conjunto de coordenadas generalizadas sl, representada por larelacion
qk = qk (s1, ..., sl, t) . (2.7.1)
Bajo este cambio de coordenadas, el lagrangiano del sistema quedara repre-sentado por una funcion con argumentos
L (s, s, t) = L [q (s, t) , q (s, s, t) , t] . (2.7.2)
Notese que las velocidades generalizadas qk dependen de las velocidades sl.Esto se observa facilmente en la relacion
qk =X
l
@qk@sl
sl +@qk@t
. (2.7.3)
Si todas las fuerzas que actuan son conservativas, la ecuacion de Lagrangeque obedece L es
d
dt
✓
@L
@qk
◆
� @L
@qk= 0. (2.7.4)
Ahora se calculara cual es la ecuacion que satisface L. Para ello notese que
@L
@sk=
nX
l=1
✓
@L
@ql
@ql@sk
+@L
@ql
@ql@sk
◆
. (2.7.5)
Ademas,
@L
@sk=
nX
l=1
@L
@ql
@ql@sk
, (2.7.6)
y por ello
d
dt
✓
@L
@sk
◆
=d
dt
nX
l=1
@L
@ql
@ql@sk
=nX
l=1
d
dt
✓
@L
@ql
◆
@ql@sk
+@L
@ql
d
dt
✓
@ql@sk
◆�
. (2.7.7)
Utilizando la ecuacion del Lagrange de L, (2.7.4), se puede reemplazar el primertermino de la derecha,
d
dt
✓
@L
@sk
◆
=nX
l=1
@L
@ql
@ql@sk
+@L
@ql
d
dt
✓
@ql@sk
◆�
, (2.7.8)
y debido a (2.4.8),

CAPITULO 2. FORMULACION DE LAGRANGE 47
d
dt
✓
@L
@sk
◆
=nX
l=1
@L
@ql
@ql@sk
+@L
@ql
d
dt
✓
@ql@sk
◆�
(2.7.9)
d
dt
✓
@L
@sk
◆
=nX
l=1
@L
@ql
@ql@sk
+@L
@ql
@ql@sk
�
. (2.7.10)
De esta forma, la ecuacion de Lagrange para L se obtiene a partir de (2.7.5) y(2.11.4),
d
dt
✓
@L
@sk
◆
� @L
@sk=
nX
l=1
@L
@ql
@ql@sk
+@L
@ql
@ql@sk
�
�nX
l=1
@L
@ql
@ql@sk
+@L
@ql
@ql@sk
�
(2.7.11)
d
dt
✓
@L
@sk
◆
� @L
@sk= 0. (2.7.12)
Esta relacion indica que la ecuacion de Lagrange es invariante bajo trans-formaciones de coordenadas.
2.8. Transformaciones de Calibracion
La ecuacion de Lagrange es tambien invariante bajo transformaciones decalibracion, es decir transformaciones en las que el lagrangiano L se redefine enla forma
L0 = L+dF
dt, (2.8.1)
donde F = F (q1
, ..., qn, t) es una funcion escalar de las coordenadas y del tiem-po. Para comprobar que, en efecto, la ecuacion de Lagrange es invariante, noteseque
d
dt
✓@L0
@qk
◆�
@L0
@qk
=d
dt
✓@L
@qk
◆+
d
dt
✓@
@qk
✓dF
dt
◆◆�
@L
@qk
�@
@qk
✓dF
dt
◆(2.8.2)
=d
dt
✓@L
@qk
◆�
@L
@qk
+d
dt
✓@
@qk
✓dF
dt
◆◆�
@
@qk
✓dF
dt
◆. (2.8.3)
Los dos primeros terminos de la derecha cooresponden a la ecuacion delagrange para L y por esta razon desaparecen. De esta forma,
d
dt
✓
@L0
@qk
◆
� @L0
@qk=
d
dt
✓
@
@qk
✓
dF
dt
◆◆
� @
@qk
✓
dF
dt
◆
. (2.8.4)
Ahora bien, ya que F depende unicamente de las coordenadas y del tiempo,

CAPITULO 2. FORMULACION DE LAGRANGE 48
dF
dt=
nX
l=1
@F
@qlql +
@F
@t, (2.8.5)
y por ello
@
@qk
✓
dF
dt
◆
=@F
@qk. (2.8.6)
De esta forma, finalmente se tiene
d
dt
✓
@L0
@qk
◆
� @L0
@qk=
d
dt
✓
@F
@qk
◆
� @
@qk
✓
dF
dt
◆
(2.8.7)
d
dt
✓
@L0
@qk
◆
� @L0
@qk= 0. (2.8.8)
2.9. Forma General de la Energıa Cinetica
La energıa cinetica para un sistema con N partıculas se definio como (2.11.4)
T =1
2
NX
j=1
mjv2
j =1
2
NX
j=1
mj~vj · ~vj = 1
2
NX
j=1
mj~rj · ~rj . (2.9.1)
Si el sistema tiene n grados de libertad, las velocidades se pueden escribir
~rj =nX
l=1
@~rj@ql
ql +@~rj@t
, (2.9.2)
y de esta forma,
T =1
2
NX
j=1
mj
nX
l=1
@~rj@ql
ql +@~rj@t
!
·
nX
k=1
@~rj@qk
qk +@~rj@t
!
(2.9.3)
T =1
2
NX
j=1
mj
"
nX
k=1
nX
l=1
@~rj@ql
· @~rj@qk
qk ql + 2nX
k=1
@~rj@qk
· @~rj@t
qk +@~rj@t
· @~rj@t
#
.
(2.9.4)Si se define el termino cuadratico en la velocidad
T2
=1
2
nX
k=1
nX
l=1
Tklqk ql (2.9.5)
con

CAPITULO 2. FORMULACION DE LAGRANGE 49
Tkl =NX
j=1
mj@~rj@ql
· @~rj@qk
, (2.9.6)
el termino lineal en la velocidad
T1
=nX
k=1
Tk qk (2.9.7)
con
Tk =NX
j=1
mj@~rj@qk
· @~rj@t
, (2.9.8)
y el termino independiente
T0
=1
2
NX
j=1
mj@~rj@t
· @~rj@t
=1
2
NX
j=1
mj
✓
@~rj@t
◆
2
,
la energıa cinetica se escribira en terminos de las velocidades generalizadas enla forma
T =1
2
nX
k=1
nX
l=1
Tklqk ql +nX
k=1
Tk qk + T0
(2.9.9)
T = T2
+ T1
+ T0
. (2.9.10)
Notese que la existencia del termino lineal en la velocidad, T1
, y del terminoindependiente, T
0
, depende de si la transformacion ~r = ~r (q1
, ..., qn, t) contieneexplıcitamente al tiempo o no. En general, se puede decir que cuando el sistemaposee ligaduras holonomas escleronomas, estos dos terminos son nulos (T
1
=T0
= 0) y en ese caso la energıa cinetica solo posee el termino cuadratico en lasvelocidades generalizadas.
Ahora bien, el lagrangiano para un sistema completamente general tomarala forma
L = T2
+ T1
+ T0
� V. (2.9.11)
Finalmente, cuando Tkl = 0 para k 6= l se dice que se utilizan coordenadasortogonales.
EjemploParticula en una barra

CAPITULO 2. FORMULACION DE LAGRANGE 50
Partıcula en una barra.
Considere el sistema que se muestra en la Figura 5 y que consta de unaparticula puntual de masa m que se mueve junto con una barra que rotacon velocidad angualr !. Si se utilizan coordenadas cilindricas, (r, ✓, z), lasligaduras del sistema se pueden escribir
z = 0
✓ � !t = 0.
La energıa cinetica de la partıcula sera
T =1
2m⇣
r2 + r2✓2⌘
=1
2m�
r2 + r2!2
�
.
Aqui es posible identificar dos terminos en la energıa cinetica,
T2
=1
2mr2
T0
=1
2mr2!2.
Por otro lado, la energıa potencial de la partıcula inmersa en el campogravitacional sera
V = mgy = mgr sin ✓ = mgr sin (!t) .
Ası, el lagrangiano en este caso es
L = T2
+ T0
� V
L =1
2mr2 +
1
2mr2!2 �mgr sin (!t) .

CAPITULO 2. FORMULACION DE LAGRANGE 51
Cuando el lagrangiano se define en terminos de un potencial generalizadoU = U (q, q, t), este tambien puede escribirse en terminos de tres funciones dela forma
L = T � U = L2
+ L1
+ L0
, (2.9.12)
donde L2
es cuadratico en las velocidades, L1
es lineal en la velocidad y L0
esun termino independiente
2.9.1. Teorema de Euler sobre Funciones Homogeneas
Una funcion F (x1
, ..., xn) se denomina homogenea de grado m si satisface
F (�x1
, ...,�xn) = �mF (x1
, ..., xn) . (2.9.13)
Considere el caso de una funcion de dos variables, F (x1
, x2
), homogenea degrado m, es decir que satisface
F (�x1
,�x2
) = �mF (x1
, x2
) . (2.9.14)
Si se definen las variables y1
= �x1
y y2
= �x2
, se tiene entonces que
dF (�x1
,�x2
)
d�=@F
@y1
@y1
@�+@F
@y2
@y2
@�= m�m�1F (x
1
, x2
) (2.9.15)
@F
@y1
x1
+@F
@y2
x2
= m�m�1F (x1
, x2
) . (2.9.16)
Ya que � es arbitrario, se puede tomar el caso particular � = 1, con lo quese obtiene
@F
@x1
x1
+@F
@x2
x2
= mF (x1
, x2
) (2.9.17)
2
X
j=1
@F
@xjxj = mF (x
1
, x2
) . (2.9.18)
La generalizacion de este resultado a funciones de n variables se conoce comoTeorema de Euler para funciones homogeneas y asegura que para toda funcionhomogenea de grado m, se cumple
nX
j=1
@F
@xjxj = mF. (2.9.19)
Si este teorema se aplica a la energıa cinetica de un sistema se tiene que
nX
k=1
@T
@qkqk = 2T
2
+ T1
, (2.9.20)

CAPITULO 2. FORMULACION DE LAGRANGE 52
ya que
nX
k=1
@T2
@qkqk = 2T
2
(2.9.21)
nX
k=1
@T1
@qkqk = 1T
1
(2.9.22)
porque T2
es una funcion homogenea de grado 2 en las velocidades, T1
es unafuncion homogenea de grado 1 y T
0
no depende de las velocidades (homogeneade grado 0).
2.10. Cantidades conservadas
2.10.1. Momentum Conjugado
Se dice que una coordenada qk es cıclica si el lagrangiano no depende explıci-tamente de ella, i.e.
@L
@qk= 0. (2.10.1)
En este caso, la ecuacion de Lagrange se reduce a
d
dt
✓
@L
@qk
◆
� @L
@qk= 0 (2.10.2)
d
dt
✓
@L
@qk
◆
= 0, (2.10.3)
y por esta razon, el momento conjugado pk a la coordenada qk, definido por
pk =@L
@qk= cte. (2.10.4)
es constante.
2.10.2. Energıa Generalizada
Considere la derivada total con respecto al tiempo del lagrangiano L =L (q, q, t),
dL
dt=
nX
k=1
@L
@qkqk +
nX
k=1
@L
@qkqk +
@L
@t. (2.10.5)
Ya que

CAPITULO 2. FORMULACION DE LAGRANGE 53
d
dt
✓
@L
@qkqk
◆
=d
dt
✓
@L
@qk
◆
qk +@L
@qkqk, (2.10.6)
se tiene
@L
@qkqk =
d
dt
✓
@L
@qkqk
◆
� d
dt
✓
@L
@qk
◆
qk, (2.10.7)
y por ello
dL
dt=
nX
k=1
@L
@qkqk +
nX
k=1
d
dt
✓
@L
@qkqk
◆
�nX
k=1
d
dt
✓
@L
@qk
◆
qk +@L
@t(2.10.8)
dL
dt= �
nX
k=1
d
dt
✓
@L
@qk
◆
� @L
@qk
�
qk +nX
k=1
d
dt
✓
@L
@qkqk
◆
+@L
@t. (2.10.9)
Debido a la ecuacion de Lagrange para L, el primer termino de la derechaes nulo,
dL
dt=
nX
k=1
d
dt
✓
@L
@qkqk
◆
+@L
@t(2.10.10)
dL
dt�
nX
k=1
d
dt
✓
@L
@qkqk
◆
=@L
@t(2.10.11)
d
dt
nX
k=1
@L
@qkqk � L
!
= �@L@t
. (2.10.12)
La cantidad entre parentesis se define como la energıa generalizada, h,
h =nX
k=1
@L
@qkqk � L, (2.10.13)
y con ello
dh
dt= �@L
@t. (2.10.14)
Si la coordenada temporal es cıclica, es decir L no depende explıcitamentedel tiempo, la energıa generalizada es constante,
Si@L
@t= 0 =) dh
dt= 0 =) h = cte. (2.10.15)

CAPITULO 2. FORMULACION DE LAGRANGE 54
2.10.3. Energıa Mecanica Total
Considere un sistema cuyo lagrangiano sea
L = T � V = T2
+ T1
+ T0
� V (2.10.16)
con V = V (q, t). La energıa generalizada (2.10.13) para este sistema es
h =nX
k=1
@L
@qkqk � L (2.10.17)
h =nX
k=1
@T2
@qkqk +
nX
k=1
@T1
@qkqk +
nX
k=1
@T0
@qkqk � (T
2
+ T1
+ T0
� V ) . (2.10.18)
Por el teorema de Euler para funciones homogeneas se tiene
h = 2T2
+ T1
� (T2
+ T1
+ T0
� V ) (2.10.19)
h = T2
� T0
+ V. (2.10.20)
Como ya se presento, si t es cıclica, @L@t = 0, la energıa generalizada se
conserva, i.e.
h = T2
� T0
+ V = cte. (2.10.21)
Por otro lado, si las ligaduras son escleronomas, xj = xj (q1, ..., qn), entoncesT0
= T1
= 0, y la cantidad conservada es
h = T2
+ V = E = cte (2.10.22)
y se denomina en este caso Energıa Mecanica Total.
EjemploParticula en un campo gravitacionalEl lagrangiano de una partıcula de masa m dentro de un campo gravi-
tacional es
L =1
2m�
x2 + y2 + z2��mgz.
Ya que las coordenadas x y y son cıclicas, se tienen las cantidades conser-vadas
px =@L
@x= mx = cte
py =@L
@y= my = cte.

CAPITULO 2. FORMULACION DE LAGRANGE 55
Por otro lado, la energıa generalizada es
h =nX
k=1
@L
@qkqk � L
h =@L
@xx+
@L
@yy +
@L
@zz � 1
2m�
x2 + y2 + z2�
+mgz
h = mx2 +my2 +mz2 � 1
2m�
x2 + y2 + z2�
+mgz
h =1
2m�
x2 + y2 + z2�
+mgz.
Comparando con la expresion h = T2
� T0
+ V se nota que T0
= 0, y porello la energıa geenralizada corresponde a la energıa mecanica total,
h =1
2m�
x2 + y2 + z2�
+mgz = E.
En el caso en el que el lagrangiano proviene de un potencial generalizadoU = U (q, q, t), se tiene
L = L2
+ L1
+ L0
(2.10.23)
y la energıa generalizada sera
h =nX
k=1
@L
@qkqk � L (2.10.24)
h =nX
k=1
@L2
@qkqk +
nX
k=1
@L1
@qkqk +
nX
k=1
@L0
@qkqk � (L
2
+ L1
+ L0
) .(2.10.25)
Debido al teorema de Euler para funciones homogeneas,
h = 2L2
+ L1
� (L2
+ L1
+ L0
) (2.10.26)
h = L2
+ L0
. (2.10.27)
EjemploPendulo Esferico

CAPITULO 2. FORMULACION DE LAGRANGE 56
Pendulo Esferico.
Espacio de Configuracion: R3
Ligaduras r � l = 0Grados de Libertad: n = 3N � = 3� 1 = 2
Coordenadas Generalizadas:
(
q1
= '
q2
= ✓Transformacion de coordenadas:
x = l sin ✓ cos'
y = l sin ✓ sin'
z = l cos ✓.
De esta forma, las velocidades seran
x = l✓ cos ✓ cos'� l' sin ✓ sin'
y = l✓ cos ✓ sin'+ l' sin ✓ cos'
z = �l✓ sin ✓.
La energıa cinetica es
T =1
2m�
x2 + y2 + z2�
T =1
2ml2
⇣
✓2 + '2 sin2 ✓⌘
.
El potencial se define con respecto al plano xy,
V = �mgz = �mgl cos ✓,
y con ello el lagrangiano es

CAPITULO 2. FORMULACION DE LAGRANGE 57
L =1
2ml2
⇣
✓2 + '2 sin2 ✓⌘
+mgl cos ✓.
A partir de este puede observarse que la coordenada ' es cıclica y porello existe una cantidad conservada,
p' =@L
@'= ml2' sin2 ✓ = cte.
Por otro lado, la coordenada temporal tambien es cıclica y por ello laenergıa generalizada se conserva. Notese que en este caso T
0
= T1
= 0 ypor ello la energıa generalizada coincide con la energıa mecanica total,
h = T2
+ V = E =1
2ml2
⇣
✓2 + '2 sin2 ✓⌘
�mgl cos ✓.
Ya que se tienen dos grados de libertad (n = 2), existen dos integralesprimeras. Una de ellas corresponde a la energıa, la cual se puede escribir,utilizando el momentum conservado p', como
E =1
2ml2
✓2 +⇣ p'ml2 sin ✓
⌘
2
�
�mgl cos ✓
E +mgl cos ✓ =1
2ml2✓2 +
1
2
p2'ml2 sin2 ✓
o despejando ✓,
✓2 =2
ml2
"
E +mgl cos ✓ � 1
2
p2'ml2 sin2 ✓
#
.
Definiendo la funcion
f (✓) =1
2
p2'ml2 sin2 ✓
�mgl cos ✓
se tiene
✓2 =2
ml2[E � f (✓)]
d✓
dt=
r
2
ml2[E � f (✓)],
con lo que se obtiene la integral primeraˆ
d✓q
2
ml2 [E � f (✓)]= t� t
0
,
que permite encontrar, en principio, la funcion ✓ = ✓ (t).

CAPITULO 2. FORMULACION DE LAGRANGE 58
Por otra parte, de la definicion del momentum conservado p' se tiene
' =p'
ml2 sin2 ✓ (t),
de donde se obtiene la integral
'� '0
=
ˆp'
ml2 sin2 ✓ (t)dt,
que permite encontrar la funcion ' = ' (t). A partir de la ley de movimiento,es decir de las funciones ✓ (t) y ' (t) es posible deducir la ecuacion de latrayectoria, es decir la funcion ✓ = ✓ ('), con lo que quedarıa completamenteresuelto el problema.
Notese que las condiciones iniciales del ejercicio, que se suelen escribir
como {~r0
,~v0
}, estan representadas aquı por las constantesn
✓0
,'0
, ✓0
, '0
o
o equivalentemente mediante las constantes {E, p', ✓0, t0}.
EjemploPendulo con punto de apoyo movil
Pendulo con el punto de apoyo movil.
Espacio de Configuracion: R6
Ligaduras
8
>
>
>
<
>
>
>
:
z1
= 0
z2
= 0
y1
= 0
(x1
� x2
)2 + (y1
� y2
)2 = l2
Grados de Libertad: n = 3N � = 6� 4 = 2
Coordenadas Generalizadas:
(
q1
= x1
= x
q2
= ✓

CAPITULO 2. FORMULACION DE LAGRANGE 59
Transformacion de coordenadas:8
>
<
>
:
x1
= x
y1
= 0
z1
= 0
8
>
<
>
:
x2
= l sin ✓ + x
y2
= l cos ✓
z2
= 0.
De esta forma, las velocidades seran
8
>
<
>
:
x1
= x
y1
= 0
z1
= 08
>
<
>
:
x2
= l✓ cos ✓ + x
y2
= �l✓ sin ✓z2
= 0.
La energıa cinetica esta dada por
T =1
2m
1
�
x2
1
+ y21
+ z21
�
+1
2m
2
�
x2
2
+ y22
+ z22
�
T =1
2m
1
x2 +1
2m
2
⇣
l2✓2 + x2 + 2l✓x cos ✓⌘
T =1
2(m
1
+m2
) x2 +1
2m
2
l2✓2 +m2
l✓x cos ✓.
El potencial se define como cero en y = �l, y de esta forma
V = m1
gl +m2
g (l � l cos ✓)
V = (m1
+m2
) gl �m2
gl cos ✓.
Ya que el primer termino es constante y en ultima solo importaran los cam-bios de potencial, se puede considerar que el potencial relevante se reducesimplemente a
V = �m2
gl cos ✓

CAPITULO 2. FORMULACION DE LAGRANGE 60
y con ello el lagrangiano es
L =1
2(m
1
+m2
) x2 +1
2m
2
l2✓2 +m2
l✓x cos ✓ +m2
gl cos ✓.
A partir de este puede observarse que la coordenada x es cıclica y porello existe una cantidad conservada,
px =@L
@x= (m
1
+m2
) x+m2
l✓ cos ✓ = cte.
Si se supone que una de las condiciones iniciales es px = 0 (i.e. el puntode apoyo del pendulo no esta en movimiento incialmente), esta ecuacion deconservacion permite escribir
x = � m2
l✓ cos ✓
(m1
+m2
).
Por otro lado, la coordenada temporal tambien es cıclica y por ellola energıa generalizada se conserva. Al igual que en el ejemplo anterior,T0
= T1
= 0 y por ello la energıa generalizada coincide con la energıamecanica total,
h = T2
+ V = E =1
2(m
1
+m2
) x2 +1
2m
2
l2✓2 +m2
l✓x cos ✓ �m2
gl cos ✓.
Ya que se tienen dos grados de libertad (n = 2), existen dos integralesprimeras. Una de ellas corresponde a la energıa,
E =
1
2
(m1 +m2)
✓m2l ˙✓ cos ✓(m1 +m2)
◆2
+
1
2
m2l2˙✓2+m2l ˙✓
m2l ˙✓ cos ✓(m1 +m2)
cos ✓�m2gl cos ✓
E =1
2
m2
2
l2✓2 cos2 ✓
(m1
+m2
)+
1
2m
2
l2✓2 � m2
2
l2✓2 cos2 ✓
(m1
+m2
)�m
2
gl cos ✓
E =1
2m
2
l2✓2 � 1
2
m2
2
l2✓2 cos2 ✓
(m1
+m2
)�m
2
gl cos ✓
E =
1
2m
2
l2 � 1
2
m2
2
l2 cos2 ✓
(m1
+m2
)
�
✓2 �m2
gl cos ✓
o despejando ✓,
✓2 =E +m
2
gl cos ✓
f (✓),

CAPITULO 2. FORMULACION DE LAGRANGE 61
donde se ha definido la funcion
f (✓) =1
2m
2
l2
1� m2
(m1
+m2
)cos2 ✓
�
.
Ası se tiene
d✓
dt=
s
E +m2
gl cos ✓
f (✓),
con lo que se obtiene la integral primera
ˆ s
f (✓)
E +m2
gl cos ✓d✓ = t� t
0
,
que permite encontrar la funcion ✓ = ✓ (t).Por otra parte, de la ecuacion para el momentum conservado junto con
la condicion inicial px = 0 se tiene
x = � m2
l✓ cos ✓
(m1
+m2
).
de donde se obtiene la integral
x� x0
=m
2
l
(m1
+m2
)
ˆ˙✓ (t) cos ✓ (t) dt,
que permite encontrar la funcion x = x (t).
EjemploParticula en una barra rotante
Pendulo en una barra rotante.
Espacio de Configuracion: R3

CAPITULO 2. FORMULACION DE LAGRANGE 62
Ligaduras
(
z = 0
sin ✓ = sin!t = ypx2
+y2
Grados de Libertad: n = 3N � = 3� 2 = 1Coordenadas Generalizadas: q
1
= rNotese que la segunda ligadura puede escribirse tambien como:
h1
= ✓ � !t = 0.
Transformacion de coordenadas:
(
x = r cos!t
y = r sin!t.
De esta forma, las velocidades son
(
x = r cos!t� r! sin!t
y = r sin!t+ r! cos!t.
La energıa cinetica esta dada por
T =1
2m�
x2 + y2�
=1
2m⇣
r2 + r2✓2⌘
=1
2m�
r2 + r2!2
�
Ya que no existe potencial en este caso,V = 0, el lagrangiano es
L =1
2m�
r2 + r2!2
�
.
La coordenada temporal es cıclica y por ello la energıa generalizada seconserva,
h =nX
k=1
@L
@qkqk � L
h = mr2 � 1
2m�
r2 + r2!2
�
h =1
2m�
r2 � r2!2
�
= cte.
La integral de la energıa resulta ser en este caso
2h
m= r2 � r2!2
r2 =2h
m+ r2!2

CAPITULO 2. FORMULACION DE LAGRANGE 63
dr
dt=
r
2h
m+ r2!2,
con lo que se obtiene la integral primeraˆ
drq
2hm + r2!2
= t� t0
,
que permite encontrar la funcion r = r (t). Al realizar la integral se obtiene
1
!ln
"
2m!
r
2h
m+ r2!2 + r!
!#
= t� t0
r
2h
m+ r2!2 + r! =
1
2m!e!(t�t0).
Si se toma el caso partıcular h = 0, la integral resulta ser
r = e!(t�t0).
2.11. Teorema de Noether
El teorema de Noether (1918) asegura que a cada simetrıa del lagrangianole corresponde la existencia de una constante de movimiento. Para comprobaresto, suponga un sistema holonomo con lagrangiano L = L (q, q, t). Definimosun nuevo sistema de coordenadas generalizadas,
(
Qk = Qk (q, q, t, ✏)
T = T (q, q, t, ✏) ,(2.11.1)
donde ✏ es un parametro continue e independiente tal que
(
Qk|✏=0
= qkT |✏=0
= t.(2.11.2)
Con esta definicion es claro que para todo k se cumple
dQk
dT=
dQk
dtdTdt
=Qk
T. (2.11.3)
TeoremaSea F la derivada total con respecto a t de una cierta funcion suave F =
F (q, q, t). Si se puede establecer una transformacion de coordenadas de la forma(2.11.1) con las propiedades (2.11.2), tal que

CAPITULO 2. FORMULACION DE LAGRANGE 64
⇢
@
@✏
L
✓
Q,dQ
dT, T
◆
T
��
✏=0
= F , (2.11.4)
entonces, la cantidad
L (q, q, t)
✓
@T
@✏
◆
✏=0
�F+X
k
@L (q.q, t)
@qk
✓
@Qk
@✏
◆
✏=0
� qk
✓
@T
@✏
◆
✏=0
�
(2.11.5)
es una integral primera del movimiento.Para comprobar este teorema son necesarios algunas relaciones intermedia. Paraellas se utilizara la notacion
Ak =
✓
@Qk
@✏
◆
✏=0
(2.11.6)
B =
✓
@T
@✏
◆
✏=0
. (2.11.7)
De esta forma, se tiene
Qk = Qk|✏=0
+
✓
@Qk
@✏
◆
✏=0
✏+ .... = Qk|✏=0
+Ak✏+ .... (2.11.8)
T = T |✏=0
+
✓
@T
@✏
◆
✏=0
✏+ .... = T |✏=0
+B✏+ .... (2.11.9)
es decir que a primer orden en ✏,
Qk = qk +Ak✏ (2.11.10)
T = t+B✏, (2.11.11)
y por ello
Qk = qk + Ak✏ (2.11.12)
T = 1 + B✏. (2.11.13)
Ası,
dQk
dT=
Qk
T=
qk + Ak✏
1 + B✏, (2.11.14)
y por lo tanto al derivar con respecto a ✏,

CAPITULO 2. FORMULACION DE LAGRANGE 65
@
@✏
✓
dQk
dT
◆
=@
@✏
qk + Ak✏
1 + B✏
!
(2.11.15)
=Ak
⇣
1 + B✏⌘
�⇣
qk + Ak✏⌘
B⇣
1 + B✏⌘
2
, (2.11.16)
y evaluando en ✏ = 0,
@
@✏
✓
dQk
dT
◆�
✏=0
= Ak � qkB. (2.11.17)
Ahora bien, para probar el teorema se tomara la ecuacion (2.11.4) y serealizara la derivada con respecto a ✏,
⇢
@
@✏
L
✓
Q,dQ
dT, T
◆
T
��
✏=0
=
(
@
@✏
L
✓
Q,dQ
dT, T
◆�
T +@T
@✏L
✓
Q,dQ
dT, T
◆
)
✏=0
= F .
(2.11.18)Notese que
@T
@✏= B (2.11.19)
y que
@
@✏
L
✓
Q,dQ
dT, T
◆�
=X
k
@L
@Qk
@Qk
@✏+X
k
@L
@⇣
@Qk
@T
⌘
@
@✏
✓
@Qk
@T
◆
+@L
@T
@T
@✏.
(2.11.20)
@
@✏
L
✓
Q,dQ
dT, T
◆�
=X
k
@L
@QkAk +
X
k
@L
@⇣
@Qk
@T
⌘
@
@✏
✓
@Qk
@T
◆
+@L
@TB.
(2.11.21)Al multiplicar por T y evaluar en ✏ = 0, se tiene
⇢
@
@✏
L
✓
Q,dQ
dT, T
◆�
T
�
✏=0
=X
k
@L
@qkAk +
X
k
@L
@qk
⇣
Ak � qkB⌘
+@L
@tB,
(2.11.22)y con ello, la ecuacion (2.11.18) resulta ser
X
k
@L
@qkAk +
X
k
@L
@qk
⇣
Ak � qkB⌘
+@L
@tB + BL = F . (2.11.23)

CAPITULO 2. FORMULACION DE LAGRANGE 66
Utilizando en el tercer termino de la izquierda
@L
@t=
dL
dt�X
k
@L
@qkqk �
X
k
@L
@qkqk (2.11.24)
y en el primer termino
@L
@qk=
d
dt
✓
@L
@qk
◆
, (2.11.25)
se obtiene
X
k
Akd
dt
✓
@L
@qk
◆
+X
k
@L
@qk
⇣
Ak � qkB⌘
+B
"
dL
dt�X
k
@L
@qkqk �
X
k
@L
@qkqk
#
+BL = F .
(2.11.26)Reuniendo algunos terminos adecuadamente,
X
k
d
dt
✓
Ak@L
@qk
◆
�X
k
@L
@qkqkB +
d (BL)
dt�X
k
@L
@qkqkB �
X
k
@L
@qkqkB = F
(2.11.27)
X
k
d
dt
✓
Ak@L
@qk
◆
+d (BL)
dt�X
k
@L
@qkqkB�
X
k
d
dt
✓
@L
@qk
◆
qkB�X
k
@L
@qkqkB = F
(2.11.28)
X
k
d
dt
✓
Ak@L
@qk
◆
+d (BL)
dt� d
dt
X
k
@L
@qkqkB
!
= F (2.11.29)
d
dt
"
X
k
Ak@L
@qk+BL�
X
k
@L
@qkqkB
#
=dF
dt(2.11.30)
d
dt
"
X
k
Ak@L
@qk+BL�
X
k
@L
@qkqkB � F
#
= 0. (2.11.31)
Ahora bien, notese que dentro del parentesis se pueden agrupar algunos termi-nos,
d
dt
"
X
k
@L
@qk(Ak � qkB) +BL� F
#
= 0 (2.11.32)
d
dt
"
X
k
@L
@qk
✓
@Qk
@✏
◆
✏=0
� qk
✓
@T
@✏
◆
✏=0
�
+ L
✓
@T
@✏
◆
✏=0
� F
#
= 0, (2.11.33)

CAPITULO 2. FORMULACION DE LAGRANGE 67
lo que implica directamente que la cantidad entre parentesis,
X
k
@L
@qk
✓
@Qk
@✏
◆
✏=0
� qk
✓
@T
@✏
◆
✏=0
�
+ L
✓
@T
@✏
◆
✏=0
� F = cte. (2.11.34)
es una integral primera (i.e. se conserva).
2.12. Principio de Hamilton
Hasta ahora, el sistema ha sido descrito mediante n coordenadas genera-lizadas y el conjunto (q
1
, ..., qk) que corresponde a un punto de el espacio deconfiguracion (espacio cartesiano n�dimensional en donde los q definen los ejesde coordenadas) define el estado del sistema. Cuando avanza el tiempo, el esta-do del sistema puede cambiar, de tal forma que en el espacio de configuracionse traza una curva que simboliza la evolucion del sistema. De esta forma, auncuando esta curva no tiene nada que ver con el movimiento o evolucion fısica delsistema en el espacio tridimensional, el tiempo puede considerarse formalmentecomo un parametro para esta curva.
Si todas las fuerzas (excepto tal vez las fuerzas de ligadura) que actuan sobreun sistema son derivables de un potencial escalar que depende de coordenadas,velocidades y tiempo, V = V (q, q, t), se dice que el sistema es monogenico. Siel potencial depende unicamente de las coordenadas, V = V (q), se dice que elsistema es monogenico y tambien conservativo.
El Principio de Hamilton para sistemas monogenicos dice queEl movimiento de un sistema en el espacio de configuracion desde un tiempo
t1
hasta un tiempo t2
es tal que la lınea integral (denominada accion o accionintegral),
I =
ˆ t2
t1
Ldt, (2.12.1)
con L = T � V , tiene un valor estacionario para la trayectoria del movimiento.Ası, este principio nos asegura que, de todas las posibles trayectorias que
puede seguir el sistema en el espacio de configuracion entre los tiempos t1
y t2
,la que seguira relamente es aquella para la cual la integral (2.12.1) es estaciona-ria. Con ello se quiere decir que la integral a lo largo de esta trayectoria tendrael mismo valor hasta el segundo orden infinitesimal con respecto a las trayecto-rias vecinas. Matematicamente, este principio se puede resumir diciendo que elmovimiento del sistema en el espacio de configuracion es tal que la variacion dela accion es cero,
�I = �
ˆ t2
t1
L (q, q, t) dt = 0. (2.12.2)
Ahora bien, si las ligaduras del sistema son holonomas, el principio de Ha-milton es una condicion necesaria y suficiente para las ecuaciones de Lagrange.

CAPITULO 2. FORMULACION DE LAGRANGE 68
Para comprobarlo, se deduciran ahora las ecuaciones de Lagrange a partir de laecuacion (2.12.2).
2.12.1. Ecuacion de Euler
Suponga inicialmente el problema unidimensional en el cual se tiene unafuncion f = f (y, y, x), con y = dy
dx . Se considerara entonces la integral
I =
ˆ x2
x1
f (y, y, x) dx (2.12.3)
donde la variable x juega el papel de parametro para las trayectorias de lafuncion y (x), de las cuales se consideraran solamente aquellas cuyos puntosinicial y final son, respectivamente, y
1
= y (x1
) y y2
= y (x2
).Para encontrar la trayectoria estacionaria es necesario recordar que la con-
dicion exigida es que el valor de I no debe cambiar para trayectorias vecinas, lascuales podemos etiquetar mediante un parametro infinitesimal ↵. De esta for-ma, las trayectorias vecinas se denotaran y (x,↵), siendo y (x, 0) la trayectoriabuscada. Una forma de escribir estas trayectorias es
y (x,↵) = y (x, 0) + ↵⌘ (x) , (2.12.4)
siempre y cuando la funcion ⌘ (x) sea cero en los extremos, es decir ⌘ (x1
) =⌘ (x
2
) = 0. Esto es necesario para que todas las trayectorias consideradas co-miencen y finalicen en los puntos exigidos. Ademas, se exigira en lo que sigueque todas estas funciones se comporten adecuadamente (es decir que sean conti-nuas, no singulares y que posean al menos primera y segunda derivada continuaentre los puntos de interes).
Ası, la integral estudiada se puede escribir como
I (↵) =
ˆ x2
x1
ˆ x2
x1
f (y (x,↵) , y (x,↵) , x) dx (2.12.5)
y la condicion de tener un valor estacionario se convierte, en terminos delparametro ↵, en
✓
dI
d↵
◆
↵=0
= 0. (2.12.6)
Se tiene entonces,
df
d↵=@f
@y
@y
@↵+@f
@y
@y
@↵, (2.12.7)
por lo que
dI
d↵=
ˆ x2
x1
✓
@f
@y
@y
@↵+@f
@y
@y
@↵
◆
dx. (2.12.8)
La segunda integral resulta ser
CAPITULO 2. FORMULACION DE LAGRANGE 69
ˆ x2
x1
@f
@y
@y
@↵dx =
ˆ x2
x1
@f
@y
@
@↵
✓
@y
@x
◆
dx =
ˆ x2
x1
@f
@y
@2y
@x@↵dx. (2.12.9)
Integrando por partes esta ultima expresion se tiene
ˆ x2
x1
@f
@y
@y
@↵dx =
@f
@y
@y
@↵
�
�
�
�
x2
x1
�ˆ x2
x1
d
dx
✓
@f
@y
◆
@y
@↵dx. (2.12.10)
Ya que se exigio que todas las curvas deben pasar por los puntos y1
y y2
, entoncesla derivada parcial de y con respecto a ↵ evaluadas en x
1
y en x2
debe ser cero.Con ello
ˆ x2
x1
@f
@y
@y
@↵dx = �
ˆ x2
x1
d
dx
✓
@f
@y
◆
@y
@↵dx, (2.12.11)
y la variacion de la accion es
dI
d↵=
ˆ x2
x1
@f
@y
@y
@↵� d
dx
✓
@f
@y
◆
@y
@↵
�
dx (2.12.12)
dI
d↵=
ˆ x2
x1
@f
@y� d
dx
✓
@f
@y
◆�
@y
@↵dx. (2.12.13)
De esta forma, la condicion de tener un valor estacionario se escribe
✓
dI
d↵
◆
↵=0
=
ˆ x2
x1
@f
@y� d
dx
✓
@f
@y
◆�✓
@y
@↵
◆
↵=0
dx = 0. (2.12.14)
Utilizando la ecuacion (2.13.1), se tiene
✓
@y
@↵
◆
↵=0
= ⌘ (x) , (2.12.15)
con lo que
✓
dI
d↵
◆
↵=0
=
ˆ x2
x1
@f
@y� d
dx
✓
@f
@y
◆�
⌘ (x) dx = 0. (2.12.16)
La funcion ⌘ (x) es completamente arbitraria (excepto por la condicion decontinuidad y valor en los extremos, lo cual no afecta la integral), con lo que seconcluye que para que esta integral valga cero, la funcion en parentesis debe sernula en el intervalo (x
1
, x2
), i.e.
@f
@y� d
dx
✓
@f
@y
◆
= 0. (2.12.17)
Es decir que exigir que el valor de la integral sea estacionario equivale a decirque la funcion f satisface la ecuacion de Euler (2.12.17).

CAPITULO 2. FORMULACION DE LAGRANGE 70
Ahora bien, la cantidad
✓
@y
@↵
◆
↵=0
d↵ = �y (2.12.18)
representa el cambio infinitesimal entre una trayectoria vecina y la trayecto-ria que sigue el sistema, por lo que se puede interpretar como el desplazamientovirtual descrito antes. Con esto en mente, se puede escribir la variacion infinte-simal de la integral con respecto a la trayectoria correcta como
�I =
✓
dI
d↵
◆
↵=0
�↵, (2.12.19)
y la condicion de una accion estacionaria como
�I =
ˆ x2
x1
@f
@y� d
dx
✓
@f
@y
◆�
�ydx = 0. (2.12.20)
EjemploGeodesica sobre una superficie esferica. IConsidere la lınea integral (longitud de linea) entre dos puntos a y b
descrita por
I =
ˆ b
a
ds,
con ds el elemento diferencial de longitud, que en la superficie de una esferade radio r sera
ds2 = r2�
d✓2 + sin2 ✓d'2
�
ds = rq
d✓2 + sin2 ✓d'2
ds = r
s
✓
d✓
d'
◆
2
+ sin2 ✓d'.
Con ello la longitud de lınea sera
I = r
ˆ b
a
s
✓
d✓
d'
◆
2
+ sin2 ✓d'.
Si se define la funcion
f⇣
✓, ✓⌘
=
s
✓
d✓
d'
◆
2
+ sin2 ✓ =
q
✓2 + sin2 ✓

CAPITULO 2. FORMULACION DE LAGRANGE 71
con ✓ = d✓d' , la longitud de lınea es
I = r
ˆ b
a
f⇣
✓, ✓⌘
d'.
Una geodesica es aquella curva que tiene la longitud mas corta entre dospuntos. En terminos matematicos la geodesica esta caracterizada por que lavariacion de la integral de linea a lo largo de ella tiene un valor estacionario,i.e.
�I = 0.
Como se demostro arriba, esta condicion equivale, en terminos de la funcionf , a la ecuacion de Euler,
d
d'
✓
@f
@✓
◆
� @f
@✓= 0.
Se tiene entonces,
@f
@✓=
sin ✓ cos ✓p
✓2 + sin2 ✓
@f
@✓=
✓p
✓2 + sin2 ✓,
y por ello la ecuacion de la geodesica es
d
d'
✓p
✓2 + sin2 ✓,
!
� sin ✓ cos ✓p
✓2 + sin2 ✓= 0.
2.12.2. Segunda Forma de la Ecuacion de Euler
Ya que f = f (y, y, x) se tiene
df
dx=@f
@yy +
@f
@yy +
@f
@x. (2.12.21)
Por otro lado, se tiene
d
dx
✓
@f
@yy
◆
=d
dx
✓
@f
@y
◆
y +@f
@yy (2.12.22)
@f
@yy =
d
dx
✓
@f
@yy
◆
� d
dx
✓
@f
@y
◆
y (2.12.23)

CAPITULO 2. FORMULACION DE LAGRANGE 72
con lo que
df
dx=@f
@yy +
d
dx
✓
@f
@yy
◆
� d
dx
✓
@f
@y
◆
y +@f
@x. (2.12.24)
Por la ecuacion de Euler,
d
dx
✓
@f
@y
◆
=@f
@y, (2.12.25)
se obtiene
df
dx=@f
@yy +
d
dx
✓
@f
@yy
◆
� @f
@yy +
@f
@x(2.12.26)
df
dx=
d
dx
✓
@f
@yy
◆
+@f
@x, (2.12.27)
es decir
d
dx
✓
@f
@yy � f
◆
= �@f@x
. (2.12.28)
A este resultado se le conoce como el teorema de la energıa, o segunda forma dela ecuacion de Euler, ya que si f = f (y, y), entonces
d
dx
✓
@f
@yy � f
◆
= 0, (2.12.29)
es decir que la cantidad
@f
@yy � f = cte. (2.12.30)
se conserva. Notese que esta corresponde tiene la misma forma que la energıageneralizada definida antes.
EjemploGeodesica sobre una superficie esferica. IICon la funcion definida en el ejemplo anterior,
f⇣
✓, ✓⌘
=
s
✓
d✓
d'
◆
2
+ sin2 ✓ =
q
✓2 + sin2 ✓
con ✓ = d✓d' , y ya que f no depende de ', el teorema de la energıa asegura
que existe una cantidad conservada,
@f
@✓✓ � f = cte = �a.

CAPITULO 2. FORMULACION DE LAGRANGE 73
Ya que
@f
@✓=
✓p
✓2 + sin2 ✓,
se tiene
✓2p
✓2 + sin2 ✓� f = �a
✓2p
✓2 + sin2 ✓�q
✓2 + sin2 ✓ = �a
✓2 � ✓2 � sin2 ✓p
✓2 + sin2 ✓= �a
sin2 ✓p
✓2 + sin2 ✓= a
sin4 ✓ = a2⇣
✓2 + sin2 ✓⌘
.
Despejando ✓,
a✓ =p
sin4 ✓ � a2 sin2 ✓
ad✓
d'= sin ✓
p
sin2 ✓ � a2.
Con lo que se obtiene la primera integral
d' = ad✓
sin ✓p
sin2 ✓ � a2
' = a
ˆd✓
sin ✓p
sin2 ✓ � a2.
Para realizar la integral se tiene
' = a
ˆd✓
sin2 ✓q
1� a2
sin
2 ✓
' = a
ˆcsc2 ✓d✓p
1� a2 csc2 ✓
y con ello se obtiene
' = sin�1
✓
cot ✓
�
◆
+ ↵

CAPITULO 2. FORMULACION DE LAGRANGE 74
con ↵ una constante de integracion y
�2 =1� a2
a2.
Ası la ecuacion de la geodesica es
cot ✓ = � sin ('� ↵) .Para interpretar geometricamente esta ecuacion, se multiplicara por
r sin ✓ a ambos lados,
r cos ✓ = �r sin ✓ sin ('� ↵)
r cos ✓ = �r sin ✓ [sin' cos↵� sin↵ cos']
r cos ✓ = �r sin ✓ sin' cos↵� �r sin ✓ cos' sin↵.
Notese que las coordenadas cartesianas corresponden a
x = r sin ✓ cos'
y = r sin ✓ sin'
z = r cos ✓,
y por ello la ecuacion de la geodesica se puede escribir como
z = �y cos↵� �x sin↵o, definiendo A = �� sin↵ y B = � cos↵,
z = By +Ax
Ax+By � z = 0.
Esta corresponde a la ecuacion de un plano que pasa por el centro dela esfera (punto x = y = z = 0) en el espacio cartesiano, y visto en lasuperficie de la esfera (intersecion con el plano), permite concluir que lasgeodesicas son los ciruclos maximos.
2.12.3. Ecuacion de Euler-Lagrange
La generalizacion de los anteriores resultados al caso de mas dimensiones esdirecto, y lleva a las ecuaciones de Lagrange (tamabien conocidas como ecua-ciones de Euler-Lagrange) que ya se presentaron. Para comprobarlo, suponga

CAPITULO 2. FORMULACION DE LAGRANGE 75
que se tiene un sistema con n grados de libertad y un lagrangiano de la forma
L = L (q1
, ..., qn, q1, ..., qn, t) , (2.12.31)
que permite definir la accion
I =
ˆ t2
t1
L (q, q, t) dt. (2.12.32)
De nuevo el problema de la variacion de esta integral se puede considerarintroduciendo un parametro ↵ que identifique las curvas que puede seguir elsistema en el espacio de configuracion. Ası, esta vez se tienen n funciones de laforma
q1
(t,↵) = q1
(t, 0) + ↵⌘1
(t) (2.12.33)
......
... (2.12.34)
qn (t,↵) = qn (t, 0) + ↵⌘n (t) (2.12.35)
donde las funciones ⌘k deben satisfacer
⌘k (t1) = ⌘k (t2) = 0 para k = 1, 2, ..., n, (2.12.36)
para que todas las trayectorias pasen por los puntos inicial y final.Los despazamientos virtuales se definen esta vez como
�qk =
✓
@qk@↵
◆
↵=0
�↵ = ⌘k�↵, (2.12.37)
y con ello la variacion de la integral resulta ser
�I =
✓
@I
@↵
◆
↵=0
�↵. (2.12.38)
Con un procedimiento exacatmente igual al descrito antes, la condicion de unaaccion estacionaria, i.e.
�I = �
ˆ t2
t1
L (q, q, t) dt = 0, (2.12.39)
conduce a la ecuacion
ˆ t2
t1
nX
k=1
@L
@qk� d
dt
✓
@L
@qk
◆�
�qkdt = 0 (2.12.40)
y por lo tanto esta condicion implica directamente la ecuaciones de Euler-Lagrange,
@L
@qk� d
dt
✓
@L
@qk
◆
= 0. (2.12.41)

CAPITULO 2. FORMULACION DE LAGRANGE 76
EjemploCaida LibreEspacio de Configuracion: R3
Ligaduras
(
z = 0
x = 0Grados de Libertad: n = 3N � = 3� 2 = 1Coordenadas Generalizadas: q = yLa energıa cinetica de la partıcula es
T =1
2my2
y su potencial es
V = mg (y � yref ) . (2.12.42)
De esta forma el lagrangiano es
L = T � V =1
2my2 �mg (y � yref ) ,
y por ello la accion entre dos instantes de tiempo, t1
y t2
, toma la forma
I =
ˆ t2
t1
Ldt =
ˆ t2
t1
1
2my2 �mg (y � yref )
�
dt.
La condicion de un valor estacionario para esta accion se escribe ma-tematicamente como
�I = �
ˆ t2
t1
1
2my2 �mg (y � yref )
�
dt = 0
ˆ t2
t1
[my�y �mg�y] dt = 0
ˆ t2
t1
my�
✓
dy
dt
◆
�mg�y
�
dt = 0
ˆ t2
t1
myd
dt(�y)�mg�y
�
dt = 0.
Ahora bien, la primera integral se puede realizar por partes, obteniendo
my�y|t2t1 �ˆ t2
t1
my�ydt�ˆ t2
t1
mg�ydt = 0.
Ya que las variaciones en los extremos son nulas, el primer termino desapa-rece,
CAPITULO 2. FORMULACION DE LAGRANGE 77
�mˆ t2
t1
(y + g) �ydt = 0,
con lo que se tiene finalmente
y = �g.
2.12.4. Transformaciones de Calibracion
Si se realiza sobre el lagrangiano la transformacion de calibracion
L0 = L+dF
dt, (2.12.43)
con F = F (q, t), la variacion de la accion resulta ser
�
ˆ t2
t1
L0dt = �
ˆ t2
t1
Ldt+ �
ˆ t2
t1
dF
dtdt (2.12.44)
�
ˆ t2
t1
L0dt = �
ˆ t2
t1
Ldt+ �
ˆ t2
t1
dF (2.12.45)
�
ˆ t2
t1
L0dt = �
ˆ t2
t1
Ldt+ �Fkt2t1 . (2.12.46)
Ahora bien, ya que la funcion escalar F depende unicamente de las coordenadasy del tiempo, su variacion en los extremos debe ser nula. Por esta razon, elprincipio de Hamilton se ve inalterado bajo transformaciones de calibracion,
�
ˆ t2
t1
L0dt = �
ˆ t2
t1
Ldt = 0. (2.12.47)
2.13. Extension del Principio de Hamilton paraSistemas no-Holonomos
El principio de Hamilton se enuncio unicamente para sistemas holonomos,aun cuando esta condicion se utiliza solamente al final de la deduccion cuandose consideran las variaciones de qk como independientes. Cuando se consideransistemas no-holonomos las ligaduras pueden hacer que no todas las coordenadasgeneralizadas sean independientes.
En esta seccion se consideraran m ligaduras que puedan escribirse en laforma
h↵ (q1, ..., qn, q1, ..., qn) = 0, (2.13.1)

CAPITULO 2. FORMULACION DE LAGRANGE 78
con ↵ = 1, 2, ...,m. En este caso el sistema se denomina semi-holonomo. Paraeliminar los grados de libertad extras se utiliza el metodo de los multiplicadoresde Lagrange indeterminados, el cual se describe a continuacion.
Si la ecuacion (2.13.1) es valida, tambien se cumple
mX
↵=1
�↵h↵ = 0 (2.13.2)
donde los �↵ son funciones indeterminadas que pueden depender de las coor-denadas generalizadas y del tiempo. Ademas, se asumira que el principio deHamilton es valido para los sistemas semi-holonomos, i.e.
�
ˆ t2
t1
Ldt = 0. (2.13.3)
Sin embargo, al seguir exactamente el mismo procedimiento descrito antespara deducir las ecuaciones de Euler-Lagrange, se llegara a la ecuacion
ˆ t2
t1
nX
k=1
@L
@qk� d
dt
✓
@L
@qk
◆�
�qkdt = 0, (2.13.4)
pero esta vez los �qk no son todos independientes, por lo que no es posibleasegurar que el termino entre parentesis sea nulo. Ası, en lugar de la ecuacion(2.13.3), se tomara la expresion
�
ˆ t2
t1
L+mX
↵=1
�↵h↵
!
dt = 0. (2.13.5)
El procedimiento para la variacion del primer termino dentro de la integrales exactamente igual al descrito antes, mientras que para el segundo terminodebe tenerse encuenta que se consideraran como variables independientes los ndesplazamientos �qk y los m desplazamientos ��↵. De esta forma se tiene paraeste termino
�
ˆ t2
t1
mX
↵=1
�↵h↵
!
dt =
ˆ t2
t1
mX
↵=1
� (�↵h↵) dt (2.13.6)
�
ˆ t2
t1
mX
↵=1
�↵h↵
!
dt =
ˆ t2
t1
mX
↵=1
[h↵��↵ + �↵�h↵] dt. (2.13.7)
Ya que las ligaduras dependen de las coordenadas y de las velocidades,
�
ˆ t2
t1
mX
↵=1
�↵h↵
!
dt =
ˆ t2
t1
mX
↵=1
"
h↵��↵ + �↵X
k
✓
@h↵@qk
�qk +@h↵@qk
�qk
◆
#
dt
(2.13.8)

CAPITULO 2. FORMULACION DE LAGRANGE 79
�
ˆt2
t1
mX
↵=1
�↵
h↵
!dt =
ˆt2
t1
mX
↵=1
"h↵
��↵
+
X
k
✓�↵
@h↵
@qk
�qk
+ �↵
@h↵
@qk
�
✓dq
k
dt
◆◆#dt
(2.13.9)
�
ˆt2
t1
mX
↵=1
�↵
h↵
!dt =
ˆt2
t1
mX
↵=1
h↵
��↵
dt+
ˆt2
t1
mX
↵=1
X
k
✓�↵
@h↵
@qk
�qk
+ �↵
@h↵
@qk
ddt
(�qk
)
◆dt.
(2.13.10)
La integracion del ultimo termino se puede realizar por partes,
ˆ t2
t1
mX
↵=1
X
k
�↵@h↵@qk
d
dt(�qk) dt =
mX
↵=1
X
k
�↵@h↵@qk
�qk
�
�
�
�
�
t2
t1
�ˆ t2
t1
mX
↵=1
X
k
d
dt
✓
�↵@h↵@qk
◆
�qkdt,
(2.13.11)pero ya que las variaciones en los extremos son nulas, el primer termino desapa-rece,
ˆt2
t1
mX
↵=1
X
k
�↵
@h↵
@qk
ddt
(�qk
) dt = �ˆ
t2
t1
mX
↵=1
X
k
ddt
✓�↵
@h↵
@qk
◆�q
k
dt (2.13.12)
ˆt2
t1
mX
↵=1
X
k
�↵
@h↵
@qk
ddt
(�qk
) dt = �ˆ
t2
t1
mX
↵=1
X
k
d�
↵
dt@h
↵
@qk
+ �↵
ddt
✓@h
↵
@qk
◆��q
k
dt.
(2.13.13)
De esta forma, la ecuacion (2.13.10) resulta ser
�
ˆt2
t1
mX
↵=1
�↵
h↵
!dt =
ˆt2
t1
mX
↵=1
h↵
��↵
dt
+
ˆt2
t1
mX
↵=1
X
k
�↵
@h↵
@qk
�d�↵
dt
@h↵
@qk
� �↵
d
dt
✓@h
↵
@qk
◆��q
k
dt,
�
ˆ t2
t1
mX
↵=1
�↵h↵
!
dt =
ˆ t2
t1
mX
↵=1
h↵��↵dt+
ˆ t2
t1
X
k
Qk�qkdt, (2.13.14)
donde se ha definido
Qk =mX
↵=1
�↵
✓
@h↵@qk� d
dt
✓
@h↵@qk
◆◆
� d�↵dt
@h↵@qk
�
(2.13.15)
Reemplazando este resultado en la ecuacion (2.13.5) y teniendo en cuenta(2.13.4) la variacion de la accion completa es
�
ˆt2
t1
L+
mX
↵=1
�↵
h↵
!dt =
ˆx2
x1
nX
k=1
@L@q
k
� ddt
✓@L@q
k
◆+Q
k
��q
k
dt+
ˆt2
t1
mX
↵=1
h↵
��↵
dt = 0.

CAPITULO 2. FORMULACION DE LAGRANGE 80
Ya que los se asume que tanto los �qk como los ��↵ son independientes seobtienen las ecuaciones
h↵ = 0, (2.13.16)
que corresponde a las ecuaciones de ligadura (2.13.1) y
@L
@qk� d
dt
✓
@L
@qk
◆
+Qk = 0 (2.13.17)
que se puede escribir como
d
dt
✓
@L
@qk
◆
� @L
@qk= Qk. (2.13.18)
Aun cuando las ecuaciones de ligadura de la forma (2.13.1) no son las mas ge-nerales posibles, el metodo de multiplicadores de Lagrange puede ser extendidotambien a ligaduras holonomicas con dependecia temporal, i.e. de la forma
h↵ (q1, ..., qn, t) = 0. (2.13.19)
Por ultimo, cabe aclarar que este metodo es eficaz cuando es inconvenientereducir las coordenadas generalizadas a un conjunto totalmente independienteo cuando se quieren encontrar las fuerzas de ligadura.
EjemploParticula en una barra rotante
Partıcula en una barra rotante.
Espacio de Configuracion: R3
Ligaduras
(
z = 0
sin ✓ = sin!t = ypx2
+y2
Grados de Libertad: n = 3N � = 3� 2 = 1Coordenadas Generalizadas: q
1
= r

CAPITULO 2. FORMULACION DE LAGRANGE 81
Aun cuando el problema tiene solamente un grado de libertad, se traba-jara con dos coordenadas generalizadas (i.e. en R2 ) con el fin de encontrarla fuerza de ligadura, esto es, la fuerza que la barra le ejerce a la partıcula.Por esta razon, se escogeran las coordenadas generalizadas
Coordenadas Generalizadas:
(
q1
= r
q2
= ✓junto con la ligadura: h
1
= ✓ � !t = 0 y se utilizara el metodo demultiplicadores de Lagrange.
Transformacion de coordenadas:
(
x = r cos ✓
y = r sin ✓.
De esta forma, las velocidades son
(
x = r cos ✓ � r✓ sin ✓
y = r sin ✓ + r✓ cos ✓.
La energıa cinetica esta dada por
T =1
2m�
x2 + y2�
=1
2m⇣
r2 + r2✓2⌘
.
El potencial sera
V = mgy = mgr sin ✓
y con ello el lagrangiano es
L =1
2m⇣
r2 + r2✓2⌘
�mgr sin ✓.
En este caso los terminos Qk son
Qr =mX
↵=1
�↵
✓
@h↵@r� d
dt
✓
@h↵@r
◆◆
� d�↵dt
@h↵@r
�
Q✓ =mX
↵=1
�↵
✓
@h↵@✓� d
dt
✓
@h↵
@✓
◆◆
� d�↵dt
@h↵
@✓
�
,
pero ya que solo existe una ligadura y esta no depende de las velocidades,
Qr = �1
✓
@h1
@r
◆
= 0
Q✓ = �1
✓
@h1
@✓
◆
= �1
.

CAPITULO 2. FORMULACION DE LAGRANGE 82
De esta forma, la ecuacion de Euler-Lagrange con fuerzas de ligadurapara r contiene las derivadas
@L
@r= mr✓2 �mg sin ✓
@L
@r= mr
d
dt
✓
@L
@r
◆
= mr,
mientras que la ecuacion para ✓ incluye
@L
@✓= �mgr cos ✓
@L
@✓= mr2✓
d
dt
✓
@L
@✓
◆
= mr2✓ + 2mrr✓.
De esta forma, las ecuaciones de Euler-Lagrange con fuerzas de ligadurason
mr �mr✓2 +mg sin ✓ = Qr = 0
mr2✓ + 2mrr✓ +mgr cos ✓ = Q✓ = �1
.
Ahora bien, la ligadura para la coordenada angular permite escribir✓ = !t, y por ello
✓ = !
✓ = 0,
con lo cual, las ecuaciones de Euler-Lagrange son
mr �mr!2 +mg sin!t = 0
2mrr! +mgr cos!t = �1
.
Ası, el multiplicador de Lagrange �1
es
�1
= r (2mr! +mg cos!t) ,

CAPITULO 2. FORMULACION DE LAGRANGE 83
el cual se interpreta como una fuerza generalizada, que en este caso parti-cular toma la forma de un torque o momento y por ello el termino entreparentesis debe corresponder a la fuerza de ligadura (�
1
= ~r ⇥ ~f). Ası, seobtiene finalmente,
~f = (2mr! +mg cos!t) ✓.
EjemploPartıcula sobre una superfıcie esferica
Partıcula deslizando sobre una superficie esferica.
Espacio de Configuracion: R3
Ligaduras
(
z = 0
r � RGrados de Libertad: n = 3N � = 3� 2 = 1Coordenadas Generalizadas: q
1
= rAun cuando el problema tiene solamente un grado de libertad, se traba-
jara con dos coordenadas generalizadas (i.e. en R2 ) con el fin de encontrarla fuerza de ligadura, esto es, la fuerza que la superficie esferica ejerce sobrela partıcula. Por esta razon, se escogeran las coordenadas generalizadas
Coordenadas Generalizadas:
(
q1
= r
q2
= ✓junto con la ligadura: h
1
= r � R � 0 y se utilizara el metodo demultiplicadores de Lagrange.
Transformacion de coordenadas:
(
x = r sin ✓
y = r cos ✓.

CAPITULO 2. FORMULACION DE LAGRANGE 84
De esta forma, las velocidades son
(
x = r sin ✓ + r✓ cos ✓
y = r cos ✓ � r✓ sin ✓.
La energıa cinetica esta dada por
T =1
2m�
x2 + y2�
=1
2m⇣
r2 + r2✓2⌘
.
El potencial sera
V = mgy = mgr cos ✓
y con ello el lagrangiano es
L =1
2m⇣
r2 + r2✓2⌘
�mgr cos ✓.
En este caso los terminos Qk son
Qr =mX
↵=1
�↵
✓
@h↵@r� d
dt
✓
@h↵@r
◆◆
� d�↵dt
@h↵@r
�
Q✓ =mX
↵=1
�↵
✓
@h↵@✓� d
dt
✓
@h↵
@✓
◆◆
� d�↵dt
@h↵
@✓
�
,
pero ya que solo existe una ligadura y esta no depende de las velocidades,
Qr = �1
✓
@h1
@r
◆
= �1
Q✓ = �1
✓
@h1
@✓
◆
= 0.
De esta forma, la ecuacion de Euler-Lagrange con fuerzas de ligadurapara r contiene las derivadas
@L
@r= mr✓2 �mg cos ✓
@L
@r= mr
d
dt
✓
@L
@r
◆
= mr,
mientras que la ecuacion para ✓ incluye

CAPITULO 2. FORMULACION DE LAGRANGE 85
@L
@✓= mgr sin ✓
@L
@✓= mr2✓
d
dt
✓
@L
@✓
◆
= mr2✓ + 2mrr✓.
De esta forma, las ecuaciones de Euler-Lagrange con fuerzas de ligadurason
mr �mr✓2 +mg cos ✓ = Qr = �1
mr2✓ + 2mrr✓ �mgr sin ✓ = Q✓ = 0.
Ahora bien, la ligadura para la coordenada radial permite escribir r = Rdurante el intervalo de tiempo que la partıcula se encuentra en contacto conla superficie esferica (i.e. hasta justo antes de separarse de la superficie) , ypor ello
r = 0
r = 0,
con lo cual, las ecuaciones de Euler-Lagrange son
�mR✓2 +mg cos ✓ = �1
R✓ � g sin ✓ = 0.
El multiplicador de Lagrange �1
corresponde en este caso a la fuerzade contacto entre la superficie y la partıcula (fuerza normal) y en este casoresulta ser
�1
= mg cos ✓ �mR✓2.
Para encontrar el punto de la trayectoria donde la partıcula se despegade la superficie esferica se debe imponer la condicion Qr = �
1
= 0, quecorresponde a
�1
= mg cos ✓c �mR ✓2�
�
�
✓=✓c
= 0,
donde ✓c corresponde al angulo para el cual la partıcula se separa de lasuperficie.
Por otro lado, el lagrangiano es independiente del timepo y por ello laenergıa generalizada se conserva. En este caso esto es

CAPITULO 2. FORMULACION DE LAGRANGE 86
h =X
k
pk qk � L
h = mr2 +mr2✓2 � 1
2m⇣
r2 + r2✓2⌘
+mgr cos ✓
h =1
2m⇣
r2 + r2✓2⌘
+mgr cos ✓ = E
que corresponde a la energıa mecanica total del sistema. Aplicando la liga-dura r = R se tiene
E =1
2mR2✓2 +mgR cos ✓.
Si el movimiento de la partıcula comienza en t = 0 a partir del reposo,✓ = 0, y desde una coordenada angular incial ✓
0
, el valor de la energıamecanica total resulta ser
E = mgR cos ✓0
.
De esta forma se tiene
E =1
2mR2✓2 +mgR cos ✓ = mgR cos ✓
0
mR✓2 = 2mg (cos ✓0
� cos ✓) .
De esta forma, la condicion de despegue para la partıcula se puede escribircomo
�1
= mg cos ✓c �mR ✓2�
�
�
✓=✓c
= 0
mgcos✓c � 2mg (cos ✓0
� cos ✓c) = 0
3 cos ✓c � 2 cos ✓0
= 0
cos ✓c =2
3cos ✓
0
.
Notese que si la partıcula comienza su movimiento desde el angulo inicial✓0
= 0o, el angulo al cual se despega la partıcula sera ✓c ' 48o,2
EjemploEscalera que desliza en una superficie sin friccion

CAPITULO 2. FORMULACION DE LAGRANGE 87
Escalera deslizando en una superificie sin friccion.
Espacio de Configuracion: R6 (cuerpo rıgido)Grados de Libertad: n = 6� 5 = 1Coordenadas Generalizadas: q
1
= ✓
Para encontrar la energıa cinetica de la escalera, se considerara un cortede la escalera con espesor ds y ubicado a una distancia s del extremo inferior,como se muestra en la figura. Las coordenadas (x, y) de este fragmento sepueden expresar en terminos de la coordenada angular ✓ y la posicion delextremo inferior de la escalera X mediante la transformacion
(
x = X � s cos ✓
y = ssin✓.
La velocidad se escribira entonces
(
x = X + s✓ sin ✓
y = s✓ cos ✓.
Ya que la masa del fragmento de escalera es dm, la contribucion a laenergıa cinetica es
dT =1
2dm
⇥
x2 + y2⇤
=1
2dm
h
X2 + s2✓2 + 2sX ✓ sin ✓i
.
Para obtener la energıa cinetica total se debe integrar sobre todos los frag-mentos. Para ello se realiza el cambio de variable dm = M
L ds donde Mes la amsa total de la escalera, L es la longitud total y se asume que ladistribucion de masa es uniforme. Ası, se tiene
T =M
2L
ˆ L
0
h
X2 + s2✓2 + 2sX ✓ sin ✓i
ds
T =M
2L
X2L+L3
3✓2 + L2X ✓ sin ✓
�
.

CAPITULO 2. FORMULACION DE LAGRANGE 88
La energıa potencial tambien se puede mediante integracion. Para ello,notese que la contribucion a la energıa potencial debido al fragmento con-siderado es
dV = dmgy = dmgs sin ✓.
Realizando la integracion correspondiente se tiene
V =Mg
Lsin ✓
ˆ L
0
sds
V =MgL
2sin ✓.
De esta forma, el lagrangiano del sistema resulta ser
L =1
2M
X2 +L2
3✓2 + LX ✓ sin ✓
�
� MgL
2sin ✓.
Aun cuando el problema tiene solamente un grado de libertad, se traba-jara con dos coordenadas generalizadas (i.e. en R2 ) con el fin de encontrar lafuerza de ligadura, esto es, la fuerza que la superficie vertical (pared) ejercesobre la escalera. Por esta razon, se escogeran las coordenadas generalizadas
Coordenadas Generalizadas:
(
q1
= X
q2
= ✓junto con la ligadura: h
1
= X � L cos ✓ � 0 y se utilizara el metodo demultiplicadores de Lagrange.
En este caso los terminos Qk son
QX =mX
↵=1
�↵
✓
@h↵@X� d
dt
✓
@h↵
@X
◆◆
� d�↵dt
@h↵
@X
�
Q✓ =mX
↵=1
�↵
✓
@h↵@✓� d
dt
✓
@h↵
@✓
◆◆
� d�↵dt
@h↵
@✓
�
,
pero ya que solo existe una ligadura y esta no depende de las velocidades,
QX = �1
✓
@h1
@X
◆
= �1
Q✓ = �1
✓
@h1
@✓
◆
= �1
L sin ✓.
De esta forma, la ecuacion de Euler-Lagrange con fuerzas de ligadurapara X contiene las derivadas

CAPITULO 2. FORMULACION DE LAGRANGE 89
@L
@X= 0
@L
@X= MX +
1
2ML✓ sin ✓
d
dt
✓
@L
@X
◆
= MX +1
2ML✓ sin ✓ +
1
2ML✓2 cos ✓,
mientras que la ecuacion para ✓ incluye
@L
@✓=
1
2MLX ✓ cos ✓ � 1
2MgL cos ✓
@L
@✓=
1
3ML2✓ +
1
2MLX sin ✓
d
dt
✓
@L
@✓
◆
=d
dt
✓
1
3ML2✓ +
1
2MLX sin ✓
◆
De esta forma, las ecuaciones de Euler-Lagrange con fuerzas de ligadurason
MX +1
2ML✓ sin ✓ +
1
2ML✓2 cos ✓ = �
1
d
dt
✓
1
3ML2✓ +
1
2MLX sin ✓
◆
� 1
2MLX ✓ cos ✓ +
1
2MgL cos ✓ = �
1
L sin ✓.
Ahora bien, la ligadura para la coordenada horizontal se puede tomarcomoX = L cos ✓ durante el intervalo de tiempo que la escalera se encuentraen contacto con la superficie vertical (i.e. hasta justo antes de separarse dela pared) , y por ello
X = �L✓ sin ✓X = �L✓ sin ✓ � L✓2 cos ✓
con lo cual, las ecuaciones de Euler-Lagrange seran
�1
2ML✓ sin ✓ � 1
2ML✓2 cos ✓ = �
1

CAPITULO 2. FORMULACION DE LAGRANGE 90
d
dt
✓
1
3ML2✓ � 1
2ML2✓ sin2 ✓
◆
= �1
L sin ✓
�1
2ML2✓2 sin ✓ cos ✓ � 1
2MgL cos ✓.
El multiplicador de Lagrange �1
corresponde en este caso a la fuerza decontacto entre la superficie vertical y la escalera (fuerza normal) y en estecaso resulta ser
QX = �1
= �1
2ML✓ sin ✓ � 1
2ML✓2 cos ✓.
Para encontrar el punto de la trayectoria donde la escalera se despegade la superficie vertical se debe imponer la condicion QX = �
1
= 0, quecorresponde a
� ✓�
�
�
✓=✓c
sin ✓c � ✓2�
�
�
✓=✓c
cos ✓c = 0,
donde ✓c corresponde al angulo para el cual la escalera se separa de lapared. Para lograr despejar este angulo se debe notar que el lagrangiano esindependiente del tiempo y por ello la energıa generalizada se conserva. Eneste caso se tiene
h =X
k
pk qk � L
h = MX2 +1
2MLX ✓ sin ✓ +
1
3ML2✓2 +
1
2MLX ✓ sin ✓
�1
2M
X2 +L2
3✓2 + LX ✓ sin ✓
�
+MgL
2sin ✓
h =1
2M
X2 +L2
3✓2 + LX ✓ sin ✓
�
+MgL
2sin ✓ = E
que corresponde a la energıa mecanica total del sistema. Aplicando la liga-dura X = L cos ✓ se tiene
E =1
2
ML2
3✓2 +
MgL
2sin ✓.
Si el movimiento de la partıcula comienza en t = 0 a partir del reposo,✓ = 0, y desde una coordenada angular incial ✓
0
, el valor de la energıamecanica total resulta ser
E =MgL
2sin ✓
0
.
De esta forma se tiene

CAPITULO 2. FORMULACION DE LAGRANGE 91
E =1
2
ML2
3✓2 +
MgL
2sin ✓ =
MgL
2sin ✓
0
✓2 =3g
L(sin ✓
0
� sin ✓) .
De esta relacion tambien se obtiene,
2✓✓ = �3g
Lcos ✓✓
es decir
✓ = � 3g
2Lcos ✓.
De esta forma, la condicion de despegue para la partıcula se puede es-cribir como
3g
2Lcos ✓c sin ✓c �
3g
L(sin ✓
0
� sin ✓c)
�
cos ✓c = 0
1
2sin ✓c � sin ✓
0
+ sin ✓c = 0
3
2sin ✓c = sin ✓
0
sin ✓c =2
3sin ✓
0
Que corresponde al angulo en el que la escalera se despega de la pared.Si se esta buscano la altura hc del punto superior de la escalera en la cualocurre el despegue, se multiplica esta relacion por la longitud L, obteniendo
L sin ✓c =2
3L sin ✓
0
hc =2
3h0
donde h0
es la altura inicial.

Capıtulo 3
Problema de la FuerzaCentral
Se consideraran dos partıculas de masas m1
y m2
, ubicadas en las posicionesdadas por los vectores ~r
1
y ~r2
, respectivamente. Se define el vector ~r que vadesde una de las partıculas hasta la otra mediante la relacion
~r = ~r2
� ~r1
, (3.0.1)
y con ello la fuerza a las que estan sujetas las partıculas se representa por una
energıa potencial que puede tomar la forma general U = U⇣
~r, ~r, ...⌘
. De esta
forma, el lagrangiano del sistema es
L =1
2m
1
v21
+1
2m
2
v22
� U⇣
~r, ~r, ...⌘
. (3.0.2)
La ubicacion del centro de masa del sistema esta dada por el vector
Figura 3.0.1: Dos partıculas y ubicacion del centro de masa.
92

CAPITULO 3. PROBLEMA DE LA FUERZA CENTRAL 93
~R =m
1
~r1
+m2
~r2
m1
+m2
, (3.0.3)
y por ello la posicion de las dos partıculas se puede escribir como
(
~r1
= ~R� m2m1+m2
~r
~r2
= ~R+ m1m1+m2
~r.(3.0.4)
Este par de ecuaciones puede interpretarse como una transformacion de coor-denadas de la forma ~ri = ~ri (q1, q2, ...qn, t), donde las coordenadas generalizadascorresponden a ~r y ~R. A partir de ellas, las velocidades resultan ser
(
~r1
= ~R� m2m1+m2
~r
~r2
= ~R+ m1m1+m2
~r,(3.0.5)
y con esto, el lagrangiano puede re-escribirse en la forma
L =1
2m
1
✓
~R� m2
m1
+m2
~r
◆
2
+1
2m
2
✓
~R+m
1
m1
+m2
~r
◆
2
� U⇣
~r, ~r, ...⌘
(3.0.6)
L =1
2m1
~R2 �
2m2
m1 +m2~r · ~R+
✓m2
m1 +m2
◆2
~r2!
+1
2m2
~R2 +
2m1
m1 +m2~r · ~R+
✓m1
m1 +m2
◆2
~r2!
� U (3.0.7)
L =1
2(m
1
+m2
) ~R2 +1
2
✓
m1
m2
m1
+m2
◆
~r2 � U⇣
~r, ~r, ...⌘
. (3.0.8)
Como puede observarse, el lagrangiano puede descomponerse en un lagran-giano del centro de masa y un lagrangiano que depende de la posicion relativaentre las partıculas, i.e.
L = LCM + Lrel. (3.0.9)
Ahora bien, ya que ~R es cıclico, se tiene
@L
@ ~R= (m
1
+m2
) ~R = cte., (3.0.10)
es decir que se puede escribir
~R = ~A (3.0.11)
con ~A un vector constante, y por ello
~R = ~At+ ~B, (3.0.12)

CAPITULO 3. PROBLEMA DE LA FUERZA CENTRAL 94
con ~B otro vector constante. Esta ultima ecuacion representa el movimiento delcentro de masa del sistema y ya que el termino correspondiente al centro demasa en el lagrangiano es constante es posible tomar unicamente los terminosque dependen de la posicion relativa,
L =1
2
✓
m1
m2
m1
+m2
◆
~r2 � U⇣
~r, ~r, ...⌘
. (3.0.13)
Si se define la masa reducida del sistema mediante
µ =m
1
m2
m1
+m2
, (3.0.14)
el lagrangiano se convierte en
L =1
2µ~r2 � U
⇣
~r, ~r, ...⌘
, (3.0.15)
el cual puede interpretarse como el lagrangiano de una partıcula de masa µmoviendose con respecto a un centro fijo de fuerzas bajo un potencial U .
3.1. Cantidades Conservadas
Si se supone que la fuerza central proviene de un potencial que dependeunicamente de la distancia entre las partıculas, i.e.
U = V (r) , (3.1.1)
se tiene
~F (r) = �dV
drr. (3.1.2)
Esto implica que el torque sobre el sistema es
~N = ~r ⇥ ~F = 0 (3.1.3)
y ya que el torque y el momento angular se relacionan mediante
~N =d~l
dt, (3.1.4)
podemos concluir que el momento angular del sistema es constante. Ahora bien,de la definicion de ~l se tiene
~l = ~r ⇥m~v, (3.1.5)
por lo tanto
~r ·~l = ~r · (~r ⇥m~v) = 0. (3.1.6)
Esto quiere decir que los vectores ~r y ~l son siempre perpendiculares, y ya queel momento angular es constante, podemos concluir que el movimiento estarestringido a un plano.

CAPITULO 3. PROBLEMA DE LA FUERZA CENTRAL 95
3.1.1. Lagrangiano en el Plano del Movimiento
Si se restringe el analisis al plano en el cual se lleva a cabo el movimientodel sistema, la velocidad ~r se puede calcular de la forma usual,
~r =d
dt(rr) = rr + r
dr
dt,
y recordando que
dr
dt= ✓✓, (3.1.7)
se tiene
~r = rr + r✓✓.
De esta forma,
~r2 = ~r · ~r = r2 + r2✓2. (3.1.8)
Ası, el lagrangiano del sistema se escribira
L =1
2µ⇣
r2 + r2✓2⌘
� V (r) . (3.1.9)
3.1.2. Momento Angular y Ley de la Areas
Notese que en el lagrangiano (3.1.9) la coordenada ✓ es cıclica, lo que implicaque
p✓ =@L
@✓= µr2✓ = cte. (3.1.10)
Al comparar con la ecuacion (3.1.5) se nota inmediatamente que esta canti-dad corresponde a la magnitud del momento angular,
l = µr2✓, (3.1.11)
que se puede escribir como
l = 2µ
r2✓
2
!
. (3.1.12)
Ahora bien, cuando el radio vector se desplaza en un d✓, barre un area dadapor
dA =1
2r (rd✓) , (3.1.13)
por lo que el termino entre parentesis en la ecuacion (3.1.12) se puede interpretarcomo el area barrida por el radio vector en un cierto intervalo de tiempo, comose observa en la Figura. Ya que l es constante, se puede afirmar que

CAPITULO 3. PROBLEMA DE LA FUERZA CENTRAL 96
Figura 3.1.1: Area barrida por el radio vector.
dA
dt=
r2✓
2=
l
2µ= cte., (3.1.14)
lo que se conoce como Ley de las Areas de Kepler.
3.1.3. Energıa y Cuadraturas
El lagrangiano (3.1.9) es independiente del tiempo, es decir que la energıageneralizada se conserva,
h =X
k
@L
@qkqk � L = cte., (3.1.15)
y en este caso esta corresponde a la energıa mecanica total,
h =1
2µ⇣
r2 + r2✓2⌘
+ V (r) = E. (3.1.16)
Utilizando la definicion del momento angular se tiene
E =1
2µr2 +
1
2
l2
µr2+ V (r) . (3.1.17)
Despejando r,
r2 =2
µ
E � 1
2
l2
µr2� V (r)
�
(3.1.18)
dr
dt=
s
2
µ
E � 1
2
l2
µr2� V (r)
�
. (3.1.19)
con lo que se obtiene la integral primera
ˆ r
r0
drr
2
µ
h
E � 1
2
l2
µr2 � V (r)i
= t, (3.1.20)

CAPITULO 3. PROBLEMA DE LA FUERZA CENTRAL 97
que permite encontrar la funcion r = r (r0
, E, l, t). Una vez se tenga esta funcion,la definicion del momento angular permite escribir
✓ =l
µ [r (t)]2, (3.1.21)
de donde se obtiene la integral
✓ � ✓0
=
ˆl
µ [r (t)]2dt, (3.1.22)
que permite encontrar la funcion ✓ = ✓ (✓0
, E, l, t). Notese que las condiciones
iniciales del problema son (E, l, r0
, ✓0
) o equivalentemente⇣
r0
, ✓0
, r0
, ✓0
⌘
.
3.2. Trayectorias
3.2.1. Potencial Efectivo
La ecuacion (3.1.17) para la energıa mecanica total puede escribirse como
E =1
2µr2 + Veff (r) , (3.2.1)
donde se ha definido el potencial efectivo
Veff (r) =1
2
l2
µr2+ V (r) . (3.2.2)
De esta forma, la velocidad r esta dada por
r2 =2
µ[E � Veff (r)] (3.2.3)
y a partir de esta expresion se puede extraer mucha informacion acerca delmovimiento del sistema, como por ejemplo las clases de trayectorias permitidaspara un potencial dado.
EjemploPotencial �k
rSi el potencial tiene la forma particular
V (r) = �k
r,
el potencial efectivo resulta ser
Veff (r) =1
2
l2
µr2� k
r.

CAPITULO 3. PROBLEMA DE LA FUERZA CENTRAL 98
Potencial Efectivo para V = � k
r
.
En la Figura se observa la grafica de este potencial efectivo y se puedenotar que para el movimiento del sistema existen 4 casos de interes quedependen del valor de la energıa mecanica total.
Caso 1: E = E1
> 0La trayectoria del sistema es abierta, ya que la coordenada radial toma
valores r � r1
, donde r1
corresponde al punto de retorno (denominadoapside).
Caso 2: E = E2
= 0La trayectoria del sistema es de nuevo abierta, ya que la coordenada
radial toma valores r � r2
, donde r2
corresponde al punto de retorno. Ladiferencia con el caso 1 radica en que en este caso ✓ = 0 cuando r !1.
Caso 3: E = E3
< 0La trayectoria del sistema es acotada, ya que la coordenada radial toma
valores r4
� r � r3
, donde r3
y r4
son los puntos de retorno. Noteseque el hecho de tener una trayectoria acotada NO significa que esta seanecesariamente cerrada!
Caso 4: E = E4
= (Veff )minLa trayectoria del sistema es acotada y la coordenada radial toma un
unico valor r = r0
, es decir que la trayectoria es un cırculo. Ademas, en estatrayectoria el valor del potencial efectivo toma un valor extremo (en este
caso un mınimo), i.e.⇣
dVeff
dr
⌘
r=r0= 0. La estabilidad de esta trayectoria
depende de la forma exacta del potencial (especıficamente de su segundaderivada). En el caso del potencial V = �k
r , la orbita circular es estable ya
que corresponde a un mınimo del potencial efectivo,⇣
d2Veff
dr2
⌘
r=r0> 0.
3.2.2. Ecuacion de Lagrange Radial
A partir del lagrangiano (3.1.9) se tiene

CAPITULO 3. PROBLEMA DE LA FUERZA CENTRAL 99
@L
@r= µr✓2 � dV
dr(3.2.4)
@L
@r= µr (3.2.5)
d
dt
✓
@L
@r
◆
= µr. (3.2.6)
Por lo tanto, la ecuacion de Lagrange para la coordenada r resulta ser
µr = µr✓2 � dV
dr. (3.2.7)
Utilizando la definicion del momento angular,
µr =l2
µr3� dV
dr(3.2.8)
µr =d
dr
✓
� l2
2µr2
◆
� dV
dr, (3.2.9)
con lo que se obtiene la ecuacion de movimiento
µr = � d
dr
✓
l2
2µr2+ V
◆
, (3.2.10)
o en terminos del potencial efectivo,
µr = �dVeff
dr. (3.2.11)
EjemploTrayectorias Vecinas a la Trayectoria Circular (Caso Estable)Para considerar trayectorias cercanas a la trayectoria circular se puede
tomar la variable radial como el radio constante del circulo r0
mas unapequena contribucion x, i.e.
r = r0
+ x.
Con ello se tiene
r = x (3.2.12)
r = x. (3.2.13)
Eel potencial efectivo se puede expandir en serie alrededor del radio delcirculo,

CAPITULO 3. PROBLEMA DE LA FUERZA CENTRAL 100
Veff (r) = Veff (r0)+
✓
dVeff
dr
◆
r=r0
(r � r0
)+1
2
✓
d2Veff
dr2
◆
r=r0
(r � r0
)2+...
y ya que el potencial efectivo tiene un mınimo para la orbita circular,⇣
dVeff
dr
⌘
r=r0= 0,
Veff (r) = Veff (r0) +1
2
✓
d2Veff
dr2
◆
r=r0
(r � r0
)2 + ...
La ecuacion de Lagrange radial es entonces
µr = � d
dr
"
Veff (r0) +1
2
✓
d2Veff
dr2
◆
r=r0
(r � r0
)2 + ...
#
µr = �✓
d2Veff
dr2
◆
r=r0
(r � r0
) ,
o en terminos de x,
µx = �✓
d2Veff
dr2
◆
r=r0
x
µx+
✓
d2Veff
dr2
◆
r=r0
x = 0.
Si⇣
d2Veff
dr2
⌘
r=r0> 0, esta ecuacion se puede ver como un oscilador armonico
cuya frecuencia es
!2 =1
µ
✓
d2Veff
dr2
◆
r=r0
,
con lo que se comprueba que la trayectoria circular es estable bajo pequenasperturbaciones.
3.2.3. Simetria de la Trayectoria
A partir de las ecuaciones (3.2.18) y (3.1.22) se puede obtener la ecuacionde la trayectoria, i.e. r = r (✓). Para ello notese que en forma diferencial se tiene
drr
2
µ
h
E � 1
2
l2
µr2 � V (r)i
= dt (3.2.14)
y

CAPITULO 3. PROBLEMA DE LA FUERZA CENTRAL 101
d✓ =l
µ [r (t)]2dt. (3.2.15)
Por ello,
µr2
ld✓ =
drr
2
µ
h
E � 1
2
l2
µr2 � V (r)i
(3.2.16)
✓ � ✓0
=
ˆldr
r2r
2µh
E � 1
2
l2
µr2 � V (r)i
. (3.2.17)
Si se mide el angulo ✓ con respecto a la posicion del apside (punto de retorno),i.e. se toma ✓
0
= 0 en el apside, la ecuacion sera
✓ =
ˆldr
r2r
2µh
E � 1
2
l2
µr2 � V (r)i
. (3.2.18)
Ahora bien, a partir de la ecuacion (3.2.3) se observa que el radical deldenominador del integrando corresponde a la velocidad, y esta cambia de signocuando se pasa por un apside,
✓ =
ˆldr
µr2r. (3.2.19)
De igual forma, si realiza el cambio ✓ ! �✓, entonces la velocidad se inviertetambien, i.e. r ! �r. Esto muestra que la trayectoria es simetrica con respectoa los apsides.
3.2.4. Trayectorias Acotadas
En el caso de trayectorias acotadas, la coordenada radial r toma valores entredos extremos rmin y rmax. A partir de la ecuacion (3.2.18) se puede encontrarel desplazamiento angular durante el paso por los dos apsides,
�✓ =
ˆ rmax
rmin
ldr
r2r
2µh
E � 1
2
l2
µr2 � V (r)i
. (3.2.20)
Recuerde que una trayectoria acotada NO es sinonimo de una trayectoriacerrada. Especıficamente, para que una trayectoria sea cerrada, debe satisfacerse
�✓ =p
q2⇡ (3.2.21)
con p y q numeros enteros.

CAPITULO 3. PROBLEMA DE LA FUERZA CENTRAL 102
3.2.4.1. Teorema de Bertrand (Orbitas Cerradas)
Como se mostro antes, una orbita circular es aquella en la cual el potencialefectivo posee un extremo (maximo o mınimo), y la energıa mecanica total co-rresponde exactamente a este valor extremo. De la forma del potencial efectivo,se tiene que la condicion de extremo es
✓
dVeff
dr
◆
r=r0
=
✓
� l2
µr3+
dV (r)
dr
◆
r=r0
= 0. (3.2.22)
Notese que el segundo termino en el parentesis corresponde a la fuerza, (3.1.2)y por ello la condicion para una trayectoria circular es
F (r0
) = � l2
µr30
, (3.2.23)
es decir que la fuerza debe ser atractiva. Ademas, la energıa mecanica totaldebe ser
E = V (r0
) +l2
2µr20
, (3.2.24)
lo cual, debido a la ecuacion (3.2.3), quiere decir que para la orbita circularr = 0.
Ahora bien, la estabilidad de la orbita circular depende de la naturaleza delpotencial V (r). Si el extremo del potencial efectivo es un mınimo, la orbitacircular es estable (ver ejemplo anterior), mientras que si este extremo corres-ponde a un maximo, la orbita circular sera inestable. Como es conocido estaspropiedades de estabilidad dependen de la segunda derivada del potencial efec-tivo (concavidad). Por esta razon, se puede asegurar en general que una orbitacircular es estable si
✓
d2Veff
dr2
◆
r=r0
=
✓
3l2
µr4+
d2V (r)
dr2
◆
r=r0
> 0, (3.2.25)
o en terminos de la fuerza,
3l2
µr40
� dF (r)
dr
�
�
�
�
r=r0
> 0 (3.2.26)
dF (r)
dr
�
�
�
�
r=r0
<3l2
µr40
. (3.2.27)
Utilizando (3.2.23),
dF (r)
dr
�
�
�
�
r=r0
< �3F (r0
)
r0
(3.2.28)
d lnF
d ln r
�
�
�
�
r=r0
> �3, (3.2.29)

CAPITULO 3. PROBLEMA DE LA FUERZA CENTRAL 103
donde se cambia el signo de desigualdad debido a que se asume que F (r0)r0
esnegativo debido a (3.2.23). Ahora bien , si se asume que la fuerza central secomporta como una ley de potencias (por lo menos en la vecindad de la orbitacircular),
F (r) = �krn, (3.2.30)
con k una constante positiva, la condicion de estabilidad resulta ser
�knrn�1
�
�
r=r0< �3(�krn
0
)
r0
(3.2.31)
�knrn�1
0
< 3krn�1
0
, (3.2.32)
es decir
n > �3. (3.2.33)
Como se dedujo en el ejemplo de la orbita circular estable, cuando se consi-deran pequenas desviaciones de la orbita circular, la particula ejecuta un movi-miento armonico simple con respecto a la traycetoria circular con una frecuenciadada por
!2 =1
µ
✓
d2Veff
dr2
◆
r=r0
=1
µ
✓
3l2
µr4+
d2V (r)
dr2
◆
r=r0
, (3.2.34)
que en terminos de la fuerza central es
!2 =3l2
µ2r40
� 1
µ
dF (r)
dr
�
�
�
�
r=r0
(3.2.35)
!2 = �3F (r0
)
µr0
� 1
µ
dF (r)
dr
�
�
�
�
r=r0
(3.2.36)
!2 = �F (r0
)
µr0
"
3 +d lnF (r)
d ln r
�
�
�
�
r=r0
#
. (3.2.37)
Para que la orbita sea cerrada la frecuencia de oscilacion debe ser un numeroracional veces una cantidad fija, tal como en la ecuacion (3.2.21). Comparandocon esta ecuacion, el termino entre parentesis debe corresponder a un numeroracional, i.e.
3 +d lnF (r)
d ln r
�
�
�
�
r=r0
= �2 (3.2.38)
con �2 = qp con q y p enteros. Esta relacion debe ser valida tamnbien para
pequenas desviaciones del valor para la orbita circular (es decir para trayectoriasvecinas), con lo que se puede escribir en esta vecindad como

CAPITULO 3. PROBLEMA DE LA FUERZA CENTRAL 104
d lnF (r)
d ln r= �2 � 3. (3.2.39)
Esta relacion puede integrarse para obtener la ley de potencias para la fuerzacentral,
F (r) = � k
r3��2 . (3.2.40)
De esta forma, cualquier fuerza que se exprese en esta forma, con � racionaly n = �2� 3 > �3 , es decir �2 > 0, puede dar lugar a orbitas cerradas. Uno delos ejemplos conocidos que satisface estas condiciones es la ley del inverso delcuadrado (�2 = 1).
Ahora bien, en esta deduccion y enparticular en la derivacion de la frecuen-cia !, se consideraron unicamente perturbaciones de la orbita circualr en unaexpansion hasta primer orden. En 1873, J. Bertrand realizo un analisis consi-derando ordenes superiores en la expansion en serie con lo que obtuvo que losunicos potenciales que producen orbitas cerradas en general son los correspon-dientes a �2 = 1 (ley de inverso del cuadrado) y �2 = 4 (ley de Hooke). A esteresultado se le conoce como Teorema de Bertrand.
Para finalizar, vale la pena comentar que las observaciones astronomicasmuestran una infinidad de ejemplos de orbitas cerradas y ya que una fuerza deltipo ley de Kooke no es posible a distancias astronomicas (recuerde que estafuerza crece infinitamente para grandes distancias), se puede concluir que lafuerza gravitacional debe poseer la forma de una ley de inverso del cuadrado.Algo similar se puede decir de la interaccion electrostatica.
3.2.5. Ecuacion Diferencial de la Trayectoria
La ecuacion de Lagrange para la coordenada radial es (3.2.7),
µr =l2
µr3� dV
dr. (3.2.41)
Utilizando la regla de la cadena
dr
dt=
dr
d✓
d✓
dt=
dr
d✓✓ =
dr
d✓
l
µr2(3.2.42)
y por ello
d2r
dt2=
d
dt
✓
dr
dt
◆
=d
d✓
✓
dr
dt
◆
d✓
dt=
d
d✓
✓
dr
dt
◆
✓ =d
d✓
✓
dr
dt
◆
l
µr2(3.2.43)
d2r
dt2=
d
d✓
✓
dr
d✓
l
µr2
◆
l
µr2. (3.2.44)
De esta forma, la ecuaion de la trayectoria es

CAPITULO 3. PROBLEMA DE LA FUERZA CENTRAL 105
d
d✓
✓
dr
d✓
l
µr2
◆
l
r2=
l2
µr3� dV
dr. (3.2.45)
Si se realiza el cambio de variable
r =1
u(3.2.46)
se tienedr
du= � 1
u2
(3.2.47)
y ademas
dr
d✓=
dr
du
du
d✓= � 1
u2
du
d✓. (3.2.48)
Por otro lado,
dV
dr=
du
dr
dV
du= �u2
dV
du. (3.2.49)
Con esto, la ecuacion de la trayectoria se convierte en
d
d✓
✓
� 1
u2
du
d✓
l
µu2
◆
lu2 =l2u3
µ+ u2
dV
du(3.2.50)
� d
d✓
✓
du
d✓
◆
l2u2
µ=
l2u3
µ+ u2
dV
du(3.2.51)
�d2u
d✓2= u+
µ
l2dV
du(3.2.52)
d2u
d✓2+ u = � µ
l2dV
du. (3.2.53)
Esta ecuacion describe la trayectoria en forma diferencial y corresponde a unoscilador armonico forzado.
3.3. Problema de Kepler
A partir de este momento se restringira el estudio al potencial
V = �k
r, (3.3.1)
es decir a una fuerza de ley de inverso del cuadrado,
F = � k
r2, (3.3.2)
con k > 0. Al escoger esta forma particular de potencial, la integral para ✓(3.1.14) puede realizarse,
CAPITULO 3. PROBLEMA DE LA FUERZA CENTRAL 106
✓ � ✓0
=
ˆldr
r2r
2µh
E � 1
2
l2
µr2 � V (r)i
. (3.3.3)
Para ello, se utiliza el cambio de variable
u =1
r(3.3.4)
dru = � 1
r2dr, (3.3.5)
con lo que se obtiene
✓ � ✓0
= �ˆ
ldur
2µh
E � 1
2
l2u2
µ + kui
(3.3.6)
✓ � ✓0
= �ˆ
ldup
2µE � l2u2 + 2µku(3.3.7)
✓ � ✓0
= �ˆ
duq
2µEl2 + 2µk
l2 u� u2
. (3.3.8)
Esta integral tiene la forma estandard
ˆdu
p
↵+ �u+ �u2
=1p�� cos�1
✓
�� + 2�upq
◆
, (3.3.9)
donde q = �2 � 4↵�. Para la trayectoria estudiada se tiene
↵ =2µE
l2(3.3.10)
� =2µk
l2(3.3.11)
� = �1 (3.3.12)
y
q =
✓
2µk
l2
◆
2
+ 4
✓
2µE
l2
◆
=
✓
2µk
l2
◆
2
✓
1 +2El2
µk2
◆
. (3.3.13)
De esta forma, la trayectoria esta dada por
✓ � ✓0
= � cos�1
0
@�2µkl2 � 2u
⇣
2µkl2
⌘
q
1 + 2El2
µk2
1
A (3.3.14)

CAPITULO 3. PROBLEMA DE LA FUERZA CENTRAL 107
✓ � ✓0
= � cos�1
0
@
l2uµk � 1
q
1 + 2El2
µk2
1
A . (3.3.15)
Despejando r de esta ecuacion se obtiene
cos (✓ � ✓0
) =l2uµk � 1
q
1 + 2El2
µk2
(3.3.16)
1 +
s
1 +2El2
µk2cos (✓ � ✓
0
) =l2u
µk(3.3.17)
u =1
r=
µk
l2
"
1 +
s
1 +2El2
µk2cos (✓ � ✓
0
)
#
. (3.3.18)
Esta ecuacion se puede escribir en la forma estandard de una conica,
r =C
1 + ✏ cos (✓ � ✓0
)(3.3.19)
donde
C =l2
µk(3.3.20)
y
✏ =
s
1 +2El2
µk2(3.3.21)
se conoce como la excentricidad. La naturaleza de la orbita depende de estacantidad de acuerdo con
Si ✏ > 1, (E > 0), la orbita es una hiperbola.Si ✏ = 1, (E = 0), la orbita es una parabola.Si ✏ < 1, (E < 0), la orbita es una elipse.
Si ✏ = 0,⇣
E = Emin = µk2
2l2
⌘
, la orbita es un cırculo.
3.3.1. Periodo de la Orbita Elıptica
De la definicion del momento angular, y especıficamente de la ecuacion(3.2.17), se tiene
dA
dt=
r2✓
2=
l
2µ(3.3.22)
2dA =l
µdt. (3.3.23)

CAPITULO 3. PROBLEMA DE LA FUERZA CENTRAL 108
Integrando sobre una revolucion completa a lo largo de una elipse con semiejesmayor y menor dados por a y b, se tiene
2
ˆ ⇡ab
0
dA =
ˆ ⌧
0
l
µdt, (3.3.24)
donde ⇡ab es el area de la elipse (barrida por el radio vector en una revolucion)y ⌧ es el periodo del movimiento. Realizando las integrales se obtiene
2⇡ab =l
µ⌧, (3.3.25)
es decir que el periodo del movimiento elıptico esta dado por
⌧ =2⇡µab
l. (3.3.26)
3.3.2. Energıa
La energıa mecanica total encontrada a partir de la primera cuadratura estadada por (3.1.17),
E =1
2µr2 +
1
2
l2
µr2+ V (r) . (3.3.27)
Para el problema de Kepler se utiliza el potencial (3.3.1) para obtener
E =1
2µr2 +
1
2
l2
µr2� k
r. (3.3.28)
Ya que los apsides son puntos de retorno, en ellos se tiene r = 0, y con ello laenergıa satisface la ecuacion
E =1
2
l2
µr2� k
r(3.3.29)
Er2 + kr � 1
2
l2
µ= 0, (3.3.30)
que tiene la forma general de la cuadratica
ax2 + bx+ c = 0. (3.3.31)
Las raices x1,2 de esta ecuacion se encuentran mediante
x1,2 =
�b±pb2 � 4ac
2a, (3.3.32)
y por ello satisfacen
x1
+ x2
= � b
a. (3.3.33)

CAPITULO 3. PROBLEMA DE LA FUERZA CENTRAL 109
Figura 3.3.1: Orbita elıptica.
De esta forma, la ecuacion (3.3.26) permite encontrar la posicion de losapsides, los cuales satisfacen
r1
+ r2
= � k
E. (3.3.34)
Ahora bien, de la Figigura 13 se observa que los apsides deben ubicarse en losextremos del semieje mayor y por ello se debe satisfacer
r1
+ r2
= 2a = � k
E. (3.3.35)
De esta ecuacion se puede despejar la energıa mecanica en terminos delsemieje mayor de la elıpse,
E = � k
2a. (3.3.36)
Recuerde que el valor negativo de la energıa significa que la partıcula se encuen-tra ligada.
3.3.3. Tercera Ley de Kepler
Desde el punto de vista geometrico, la excentricidad de la elıpse viene dadaen terminos de sus semieje mayor y menor mediante
b = ap
1� ✏2. (3.3.37)
Utilizando esta relacion en la ecuacion para el periodo (3.3.26) se tiene
⌧ =2⇡µa2
p1� ✏2
l. (3.3.38)
Utilizando la ecuacion (3.3.21) para la excentricidad de las trayectorias en termi-nos de la energıa,

CAPITULO 3. PROBLEMA DE LA FUERZA CENTRAL 110
✏ =
s
1 +2El2
µk2, (3.3.39)
el periodo resulta ser
⌧ =2⇡µa2
q
� 2El2
µk2
l. (3.3.40)
Elevando al cuadrado esta expresion y utilizando (3.3.19) se tiene
⌧2 =4⇡2µ2a4
⇣
� 2El2
µk2
⌘
l2(3.3.41)
⌧2 =4⇡2µ2a4
⇣
2kl2
2aµk2
⌘
l2(3.3.42)
⌧2 =4⇡2µ
ka3. (3.3.43)
Este resultado establece que el cuadrado del periodo de una orbita elıpticaes proporcional al cubo del radio mayor de la orbita. En el caso del problemagravitacional, en el cual
k = Gm1
m2
(3.3.44)
y
µ =m
1
m2
m1
+m2
, (3.3.45)
se tiene
⌧2 =4⇡2a3
G (m1
+m2
). (3.3.46)
Cuando se considera un objeto central muy masivo (por ejemplo el sol) conmasa m
1
y una particula de masa m2
moviendose alrededor de este (por ejemploun planeta), con m
1
� m2
, se puede aproximar
⌧2 ⇡ 4⇡2a3
Gm1
(3.3.47)
⌧ ⇡ 2⇡a3/2pGm
1
. (3.3.48)
A esta relacion se le conoce como tercera ley de Kepler y establece que laconstante de proporcionalidad entre ⌧ y a3/2 es la misma para todos los planetas

CAPITULO 3. PROBLEMA DE LA FUERZA CENTRAL 111
3.3.4. Ecuacion de Kepler
La integral primera (3.1.20) permite encontrar, en principio, lafuncion r (t),
ˆ r
r0
drr
2
µ
h
E � 1
2
l2
µr2 � V (r)i
= t. (3.3.49)
Para el caso especıfico del problema de Kepler, esta ecuacion resulta ser
ˆ r
r0
drr
2
µ
h
� k2a � 1
2
l2
µr2 + kr
i
= t. (3.3.50)
De la definicion de la excentricidad, (3.3.21), se tiene
✏ =
s
1 +2El2
µk2, (3.3.51)
que para el problema de Kepler es
✏2 = 1� l2
µka, (3.3.52)
y por ello, el momento angular se puede escribir como
l2 = µka�
1� ✏2� . (3.3.53)
Reemplazando este resultado en la integral (3.3.50), se obtiene
ˆ r
r0
drr
2
µ
h
� k2a � 1
2
ka(1�✏2)r2 + k
r
i
= t (3.3.54)
ˆ r
r0
r
µ
2k
drq
� 1
2a � a(1�✏2)2r2 + 1
r
= t (3.3.55)
ˆ r
r0
r
µ
2k
rdrq
� 1
2ar2 + r � a(1�✏2)
2
= t. (3.3.56)
Para resolver esta integral, se introducira la nueva variable definida por
r = a (1� ✏ cos ) , (3.3.57)
de donde
dr = a✏ sin d . (3.3.58)

CAPITULO 3. PROBLEMA DE LA FUERZA CENTRAL 112
La variable angular se denomina anomalıa exentrica y toma valores en elintervalo 0 a 2⇡ cuando el angulo ✓ (denominado anomalıa verdadera) completauna revolucion.
Los lımites de la integracion se encuentran teneindo en cuenta que la ecuacionde la trayectoria (3.3.19),
r =l2
µk
1 + ✏ cos (✓ � ✓0
), (3.3.59)
se puede escribir tambien como
r =a�
1� ✏2�
1 + ✏ cos (✓ � ✓0
). (3.3.60)
El radio mınimo en esta trayectoria se obtiene cuando cos (✓ � ✓0
) = 1,
r0
= rmin =a�
1� ✏2�
1 + ✏= a (1� ✏) . (3.3.61)
Si se compara esta relacion con (3.3.57), se observa de inmediato que el radiomınimo (perihelio) se obtiene cuando cos = 1, es decir = 0. Con esto enmente, la integral resulta ser
ˆ
0
r
µ
2k
a (1� ✏ cos ) a✏ sin d q
� 1
2aa2 (1� ✏ cos )2 + a (1� ✏ cos )� a(1�✏2)
2
= t (3.3.62)
ˆ
0
r
µ
2k
a2✏ (1� ✏ cos ) sin d q
�a2
(1� ✏ cos )2 + a (1� ✏ cos )� a(1�✏2)2
= t. (3.3.63)
Notese que el radical en el denominador se puede expandir como
r
�a
2(1 + ✏2 cos2 � 2✏ cos ) + a (1� ✏ cos )� a (1� ✏2)
2
=
r
�a+ a� a
2✏2 cos2 + a✏ cos � a✏ cos +
a✏2
2
=
r
�a
2✏2 cos2 +
a✏2
2
=
r
a
2✏2 (1� cos2 )
=
r
a
2✏ sin . (3.3.64)
Ası, la integral se convierte en

CAPITULO 3. PROBLEMA DE LA FUERZA CENTRAL 113
ˆ
0
r
µ
2k
a2 (1� ✏ cos ) d p
a2
= t (3.3.65)
r
µa3
k
ˆ
0
(1� ✏ cos ) d = t (3.3.66)
r
µa3
k( � ✏ sin ) = t. (3.3.67)
Ya que el periodo del movimiento esta dado por
⌧ = 2⇡
r
µ
ka3, (3.3.68)
se puede definir la frecuencia angular como
! =2⇡
⌧=
s
k
µa3, (3.3.69)
y con ello,
� ✏ sin = !t. (3.3.70)
Esta ultima relacion se conoce como Ecuacion de Kepler. En ella, la cantidad!t toma valores en el rango de 0 a 2⇡ a lo largo de una revolucion completa,al igual que . Por esta razon se le denomina anomalıa media. Ahora bien, larelacion entre la anomalıa excentrica y la anomalıa verdadera se puede obtenera partir de la2 ecuaciones (3.3.57) y (3.3.60), que permiten escribir
r =a�
1� ✏2�
1 + ✏ cos (✓ � ✓0
)= a (1� ✏ cos ) , (3.3.71)
de donde
a�
1� ✏2�
a (1� ✏ cos ) � 1 = ✏ cos (✓ � ✓0
) (3.3.72)
cos � ✏1� ✏ cos = cos (✓ � ✓
0
) . (3.3.73)
Si a esta relacion se le suma uno y se le resta uno a cada lado se obtiene lasecuaciones
(
1� cos �✏1�✏ cos = 1� cos (✓ � ✓
0
)
1 + cos �✏1�✏ cos = 1 + cos (✓ � ✓
0
)(3.3.74)
(
(1+✏)(1�cos )1�✏ cos = 1� cos (✓ � ✓
0
)(1�✏)(1+cos )
1�✏ cos = 1 + cos (✓ � ✓0
) .(3.3.75)

CAPITULO 3. PROBLEMA DE LA FUERZA CENTRAL 114
Dividiendo una de estas en la otra se tiene
(1 + ✏) (1� cos )
(1� ✏) (1 + cos )=
1� cos (✓ � ✓0
)
1 + cos (✓ � ✓0
). (3.3.76)
Ahora bien, recordado las identidades trigonometricas para suma de angulos,esta expresion se puede reescribir como
✓
1 + ✏
1� ✏◆ 2 sin2
⇣
2
⌘
2 cos2⇣
2
⌘ =2 sin2
�
✓�✓02
�
2 cos2�
✓�✓02
� (3.3.77)
✓
1 + ✏
1� ✏◆
tan2✓
2
◆
= tan2✓
✓ � ✓0
2
◆
. (3.3.78)
Es decir que la relacion entre las anomalias es
r
1 + ✏
1� ✏ tan✓
2
◆
= tan
✓
✓ � ✓0
2
◆
. (3.3.79)
3.4. Dispersion por Campos Centrales
Aun cuando el interes por la fuerza central se centro en este capıtulo en elestudio del movimiento planetario, este trataimento puede ser aplicado tambiena otros tipos de fuerzas centrales, como por ejemplo el campo electrostatico. Enestos casos, es interesante analizar el fonomeno de dispersion de partıculas porun centro de fuerza.
Para ello se considerara un haz uniforme de particulas puntuales, todas deigual masa. La intensidad o densidad de flujo del haz, I, se define como elnumero de partıculas que cruzan una unidad de area perpendicular al haz porunidad de tiempo. La direccion de incidencia corresponde a la recta que pasapor el centro de fuerzas y que es paralela al vector velocidad de las particulasincidentes.
Si se supone que el campo central tiende a cero para grandes distancias, elhaz se mueve en linea recta hasta el momento en el quepasa cerca al centro defuerzas. Allı, la interaccion con cada partıcula hace que se cambie su direccionde forma atractiva o repulsiva, desviando la direccion de la trayectoria en lınearecta. Luego, al alejarse, la fuerza vuelve a ser cero y la trayectoria es de nuevouna linea recta con una direccion final que difiere de la direccion de incidencia.Se define el angulo de dispersion � como el angulo agudo entre las direccionesde incidencia y final.
Finalmente, se define el parametro de impacto b, como la distancia entre elvector de velocidad de las particulas incidentes y la recta que define la direccionde incidencia. Ya que el efecto de dispersion depende del acercamiento al centrode fuerzas, se puede decir que la dispersion producida en el haz es inversamenteproporcional al parametro de impacto, dispersion ⇠ 1
b .

CAPITULO 3. PROBLEMA DE LA FUERZA CENTRAL 115
Figura 3.4.1: Dispersion por un campo central
3.4.1. Seccion Eficaz Diferencial de Dispersion
La seccion eficaz diferencial de dispersion � (⌦) se define como
� (⌦) d⌦ =numero de partıculas dispersadas en un angulo solido d⌦ por unidad de tiempo
intensidad del haz incidente,
donde d⌦ es un elemento de angulo solido. Si se recuerda que el angulo solidobarrido por un elemento de area dA a una distancia R se escribe
d⌦ =dA
R2
, (3.4.1)
es facil comprobar a partir de la Figura 3.4.1, que el angulo solido que barre elanillo de espesor d� ubicado a un angulo � y a una distancia R del centro defuerzas, resulta ser
d⌦ =2⇡R sin� (Rd�)
R2
(3.4.2)
d⌦ = 2⇡ sin�d�. (3.4.3)
Ahora bien, el numero de partıculas incidentes que pasan por el anillo deradio b espesor db que se muestra en la Figura 3.4.2 es
# de particulas = I2⇡b |db| = I� (⌦) |d⌦| , (3.4.4)
donde la ultima igualdad se consigue utilizando la definicion de la seccion eficazdiferencial de dispersion y los valores absolutos se utilizan porque el numero departıculas siempre debe ser una cantidad positiva. De esta manera, se tiene
2⇡b |db| = � (⌦) |d⌦| (3.4.5)
2⇡b |db| = � (⌦) 2⇡ sin� |d�| , (3.4.6)

CAPITULO 3. PROBLEMA DE LA FUERZA CENTRAL 116
Figura 3.4.2: Seccion Eficaz de Dispersion
es decir
� (⌦) =b
sin�
�
�
�
�
db
d�
�
�
�
�
. (3.4.7)
Para calcular esta cantidad es necesario conocer la funcion b = b (�) y paraello se necesita la ecuacion de la trayectoria para las partıculas. A partir de laFigura 3.4.3se observa que el angulo de dispersion se puede escribir como
� = ⇡ � 2 , (3.4.8)
donde es el angulo entre la direccion de incidenciay la direccion del punto demaximo acercamiento (periapsis). Este angulo puede encontrarse encontrandola ecuacion (3.2.17)
✓ � ✓0
=
ˆldr
r2q
2m⇥
E � 1
2
l2
mr2 � V (r)⇤
. (3.4.9)
Aqui, el momento angular de un partıcula que incide con parametro deimpacto b y velocidad v
0
se puede escribir como
l = mbv0
= bp2mE, (3.4.10)
donde la ultima igualdad se consigue ya que en la region asintotica el campocentral es nulo y la energıa es unicamente cinetica. De esta manera, se tiene
✓ � ✓0
=
ˆbp2mEdr
r2q
2m⇥
E � 1
2
b22Er2 � V (r)
⇤
. (3.4.11)
El angulo se obtendra como la diferencia de la direccion asintotica dellegada y la direccion del punto de mayor acercamiento (r = rmin), i.e.
= ✓ (t = +1)� ✓ (t = 0) , (3.4.12)
o en terminsos de la integral como
CAPITULO 3. PROBLEMA DE LA FUERZA CENTRAL 117
Figura 3.4.3: Simetrıa de la trayectoria de las particulas dispersadas
=
ˆ 1
rmin
bpEdr
r2q
E � b2Er2 � V (r)
, (3.4.13)
que se puede escribir como
=
ˆ 1
rmin
bdr
r2r
h
1� b2
r2 � V (r)E
i
. (3.4.14)
Ası, el angullo de dispersion se puede escribir como
� = ⇡ � 2
ˆ 1
rmin
bdr
r2r
h
1� b2
r2 � V (r)E
i
. (3.4.15)
Al realizar el cambio de variable usual,
r =1
u,
se tiene
� = ⇡ � 2
ˆ umax
0
bdu
r2r
h
1� b2u2 � V (u)E
i
. (3.4.16)
Notese que esta ecuacion permite, en principio, encontrar una relacion entreel angulo de dispersion y el parametro de impacto, � = � (b, E) la cual puedeinvertirse para encontrar la relacion buscada, es decir b = b (�, E).
3.4.2. Dispersion de Rutherford
Uno de los problemas de dispersion mas impoirtante es el producido sobrecargas electricas debido a un campo de Coulomb. La fuerza central entre unapartıcula con carga Ze y otra con carga �Z 0e tiene la forma

CAPITULO 3. PROBLEMA DE LA FUERZA CENTRAL 118
F (r) =ZZ 0e2
r2, (3.4.17)
es decir, es una ley de inverso de cuadrado. Como se mostro antes, para unapartıcula con energia E > 0, la excentricidad es ✏ > 1, es decir que la trayectoriaque sigue es una hiperbola. A partir de la ecuacion (3.3.18),
1
r=
mk
l2
"
1 +
r
1 +2El2
mk2cos (✓ � ✓
0
)
#
, (3.4.18)
y el momento angular en terminos del parametro de impacto, se tiene
1
r=
k
2b2E
"
1 +
r
1 +4E2b2
k2cos (✓ � ✓
0
)
#
, (3.4.19)
donde k = ZZ 0e2. El valor mınimo del radio, r = rmin, se obtiene para✓ = ✓
0
, y si se evalua esta expresion para un tiempo muy grande, t ! 1, elradio vector tiende a infinito y la expresion toma la forma
1
r (t =1)=
k
2b2E
"
1 +
r
1 +4E2b2
k2cos (✓ (t =1)� ✓
0
)
#
= 0 (3.4.20)
Recordando la definicion del angulo = ✓ (t =1)� ✓0
, se obtiene
1
r (t =1)=
k
2b2E
"
1 +
r
1 +4E2b2
k2cos
#
= 0. (3.4.21)
De esta forma, se debe cumplir
cos = � 1q
1 + 4E2b2
k2
, (3.4.22)
y recordando que � = ⇡ � 2 ,
cos
✓
⇡ � �2
◆
= � 1q
1 + 4E2b2
k2
(3.4.23)
sin⇣�
2
⌘
= � 1q
1 + 4E2b2
k2
, (3.4.24)
es decir
sin2⇣�
2
⌘
=1
1 + 4E2b2
k2
. (3.4.25)
Al despejar el termino que incluye el parametro impacto,

CAPITULO 3. PROBLEMA DE LA FUERZA CENTRAL 119
4E2b2
k2=
1
sin2�
�2
� � 1. (3.4.26)
Expresando apropiadamente el uno del ultimo termino en el lado derecho,se puede escribir
4E2b2
k2=
1
sin2�
�2
� � sin2�
�2
�
sin2�
�2
� =cos2
�
�2
�
sin2�
�2
� , (3.4.27)
es decir que
4E2b2
k2= cot2
⇣�
2
⌘
, (3.4.28)
de donde se puede despejar el parametro de impacto en funcion del angulo dedispersion,
b (�) =k
2Ecot
⇣�
2
⌘
. (3.4.29)
Esta funcion permite encontrar inmediatamente la seccion eficaz diferencialde dispersion,
� (⌦) =b
sin�
�
�
�
�
db
d�
�
�
�
�
(3.4.30)
� (⌦) =k2
4E2
cot�
�2
�
sin�
�
�
�
�
d
d�
⇣
cot⇣�
2
⌘⌘
�
�
�
�
(3.4.31)
� (⌦) =k2
4E2
cot�
�2
�
sin�
1
2csc2
⇣�
2
⌘
(3.4.32)
� (⌦) =k2
8E2
cos�
�2
�
sin� sin3�
�2
� , (3.4.33)
y ya que sin� = 2 sin�
�2
�
cos�
�2
�
, finalmente
� (⌦) =1
4
✓
k
2E
◆
2 1
sin4�
�2
� . (3.4.34)
A partir de esta cantidad, es posible calcular la seccion eficaz total de dis-persion, �T , mediante
�T =
ˆ4⇡
� (⌦) d⌦ = 2⇡
ˆ ⇡
0
� (�) sin�d�. (3.4.35)
Para la dispersion de Rutherford, esta integral diverge. Para comprender estecomportamiento, basta con notar que de la definicion de la seccion eficaz totalsera el numero de partıculas dispersadas en todas las direcciones por unidad detiempo para un haz con intensidad unitaria. Ya que el campo de Coulomb se

CAPITULO 3. PROBLEMA DE LA FUERZA CENTRAL 120
extiende en todo el espacio, incluso las partıculas con un parametro de impactogrande sufriran dispersion (aunque sea muy pequena) y todas estas contribu-ciones entran dentro del calculo de �T .
Este mismo comportamiento ocurre para todos los campos que se extiendenpor todo el espacio. En realidad, para que �T no presente un comportamientodivergente, la unica posibilidad es que exista un corte (cut-o↵ ), es decir que elcampo sea nulo para regiones mayores a una cierta distancia, r > r⇤.

Capıtulo 4
Cinematica del CuerpoRıgido
4.1. Grados de Libertad
Un cuerpo rıgido es un conjunto de N partıculas , por lo que posee, en princi-pio, 3N grados de libertad. Sin embargo, las distancias mutuas entre partıculasson constantes, lo cual se puede escribir como el conjunto de ligaduras
rij = cij = cte. (4.1.1)
Para ubicar la posicion de un punto en un cuerpo rıgido, no es necesarioespecificar sus distancias a todos los demas puntos. Para ello solamente hacefalta especificar la posicion con respecto a tres puntos no colineares. Dee staforma, una vez que se determina la posicion de tres partıculas dentro del cuerporıgido, todas las demas partıculas quedan ubicadas utilizando las ligaduras.
EjemploUna partıcula puntual posee tres grados de libertad. Si se consideran
dos partıculas puntuales unidas con una barra rigida sin masa existe unaligadura, r
12
= c12
y por ello el numero de grados de libertad se reduce an = 3N � = 6� 1 = 5.
Si se consideran tres partıculas unidas con dos barras rıgidas que puedenrotar independiente y libremente como se muestra en la Figura, existen dosligaduras: r
12
= c12
y r13
= c13
. Ası, el numero de grados de libertad sereduce a n = 3N � = 9� 2 = 7.
Finalmente, si las tres partıculas se unen con tres barras rıgidas existentres ligaduras r
12
= c12
, r13
= c13
y r23
= c23
. Por esta razon, el numerode grados de libertad es de n = 3N � = 9� 3 = 6.
121

CAPITULO 4. CINEMATICA DEL CUERPO RIGIDO 122
Figura 4.1.1: Ubicacion y orientacion del Cuerpo Rıgidos
Como se muestra en el ejemplo, para ubicar tres partıculas unidas con barrasrıgidas se tienen 6 grados de libertad, al igual que para determinar la ubicacionde cualquier cuerpo rıgido.
Ahora bien, las coordenadas generalizadas que dan cuenta de estos 6 gradosde libertad se pueden tomar como las tres coordenadas cartesianas que ubicanun punto dentro del objeto (este puede ser un punto fijo, si este existe, o en sudefecto el centro de masa del cuerpo rıgido) y los tres angulos que determinanla orientacion del cuerpo rıgido con respecto a la ubicacion de este punto.
Denotaremos OXY Z el sistema de coordenadas con respecto al cual que-remos ubicar el cuerpo rıgido, mientras que o0xyz corresponde a un sistemacentrado en un punto del cuerpo rıgido (punto fijo o centro de masa) y quetiene sus ejes paralelos al sistema OXY Z. Finalmente, se denotara por o0x0y0z0
el sistema de coordenadas fijo al cuerpo y que dara cuenta de la orientacion delmismo, como se observa en la Figura 4.1.1. Se definiran los vectores unitariosi, j, k en direccion de los ejes X,Y, Z, los cuales satisfacen
i · i = j · j = k · k = 1 (4.1.2)
i · j = j · k = k · j = 0, (4.1.3)
y los vectores unitarios i0, j0, k0 en direccion de los ejes X 0, Y 0, Z 0, con un con-junto de relaciones similar.
Ahora bien, la orientacion de cada un de los ejes primados con respecto a losno primados se puede dar en terminos de los cosenos directores definidos porlas relaciones (ver Figura 4.1.2)
8
>
<
>
:
cos ✓11
= i0 · icos ✓
12
= i0 · jcos ✓
13
= i0 · k(4.1.4)

CAPITULO 4. CINEMATICA DEL CUERPO RIGIDO 123
Figura 4.1.2: Cosenos Directoress
8
>
<
>
:
cos ✓21
= j0 · icos ✓
22
= j0 · jcos ✓
23
= j0 · k(4.1.5)
8
>
<
>
:
cos ✓31
= k0 · icos ✓
32
= k0 · jcos ✓
33
= k0 · k.(4.1.6)
En esta definicion de los angulos ✓ij el primer ındice se refiere al sistemaprimado y el segundo ındice al sistema no primado. Notese que este conjunto denueve cosenos directores determina completamente la orientacion del sistema deejes primados con respecto al sistema no primado, ya que los vectores unitariosprimados se pueden escribir en terminos de los no primados mediante
i0 = cos ✓11
i+ cos ✓12
j + cos ✓13
k (4.1.7)
j0 = cos ✓21
i+ cos ✓22
j + cos ✓23
k (4.1.8)
k0 = cos ✓31
i+ cos ✓32
j + cos ✓33
k. (4.1.9)
Ahora bien, a partir de este conjunto de ecuacioens y de las condiciones deortonormalidad de los vectores unitarios primados y no primados, es sencillomostrar que los cosenos directores satisfacen las relaciones
3
X
l=1
cos ✓lm cos ✓ln = 0 (4.1.10)
3
X
l=1
cos ✓lm cos ✓ln =3
X
l=1
cos2 ✓lm = 1. (4.1.11)
Estas dos relaciones se pueden reescribir en una sola ecuacion como

CAPITULO 4. CINEMATICA DEL CUERPO RIGIDO 124
3
X
l=1
cos ✓lm cos ✓ln = �mn, (4.1.12)
con �mn la funcion delta de kronecker.Un vector cualquiera ~r se puede escribir en los dos sistemas de coordenadas,
~r = xi+ yj + zk = x0i0 + y0j0 + z0k0. (4.1.13)
Las componentes del vector en cada uno de los sistemas se relacionan entre ellasmediante los cosenos directores,
8
>
<
>
:
x0 = ~r · i0 = cos ✓11
x+ cos ✓12
y + cos ✓13
z
y0 = ~r · j0 = cos ✓21
x+ cos ✓22
y + cos ✓23
z
z0 = ~r · k0 = cos ✓31
x+ cos ✓32
y + cos ✓33
z.
(4.1.14)
Es importante notar aqui que, debido a las relaciones (4.1.12), los cosenosdirectores no son todos independientes entre sı. Por esta razon, cuando se deseadeterminar la oreintaciond e un cuerpo rıgido no son necesarias nueve coorde-nadas generalizadas. En realidad, las ecuaciones (4.1.12) son 6 relaciones entrelos cosenos directores y por ello el numero de grados de libertad necesarios paradescribir la orientacion de un cuerpo rıgido son solamente tres.
4.2. Transformaciones Ortogonales
La transformacion de coordenadas (4.1.14) se puede interpretar como unatransformacion lineal definida en forma general por
8
>
<
>
:
x01
= a11
x1
+ a12
x2
+ a13
x3
x02
= a21
x1
+ a22
x2
+ a23
x3
x03
= a31
x1
+ a32
x2
+ a33
x3
,
(4.2.1)
identificando los coeficientes
aij = cos ✓ij . (4.2.2)
Esta transformacion lineal se puede escribir en forma corta como
x0i = aijxj , (4.2.3)
donde se utiliza la convencion de suma de Einstein (esto es, siempre que existaun par de ındices repetidos se asume una suma sobre todos los valores de eseındice, en este caso i, j = 1, 2, 3).
Los coeficientes que representan esta transformacion no son totalmente in-dependientes. Para encontrar las relaciones entre ellos, se puede considerar lamagnitud de un vector, la cual debe permanecer invariante. Esto es, en coorde-nadas cartesianas

CAPITULO 4. CINEMATICA DEL CUERPO RIGIDO 125
3
X
i=1
x2
i =3
X
i=1
x02i . (4.2.4)
Utilizando la transformacion lineal en el lado derecho,
3
X
i=1
x2
i =3
X
i=1
x0ix
0i (4.2.5)
3
X
i=1
x2
i =3
X
i=1
3
X
j=1
aijxj
3
X
k=1
aikxk (4.2.6)
3
X
i=1
x2
i =X
i,j,k
aijaikxjxk. (4.2.7)
Esta relacion es valida solamente si
X
i
aijaik = �jk, (4.2.8)
conocida como la condicion de ortogonalidad.
4.2.1. Representacion Matricial
Ahora bien, la transformacion lineal se puede representar matematicamenteen forma matricial como
x0 = Ax, (4.2.9)
donde
A =
2
4
a11
a12
a13
a21
a22
a23
a31
a32
a33
3
5 . (4.2.10)
Esta matriz puede interpretarse como un operador que actua sobre el sistemade coordenadas (punto de vista pasivo de la transformacion) o como un operadorque actua sobre los vectores (punto de vista activo de la transformacion). Porotro lado, la condicion de ortogonalidad se representa matricialmente mediantela expresion
AA = AA = 1, (4.2.11)
donde A representa la matriz transpuesta de A y 1 es la matriz identidad.Si se considera el enfoque activo de la transformacion y la matriz A se aplica
a un vector F, se obtendra un nuevo vector G, como
G = AF. (4.2.12)
CAPITULO 4. CINEMATICA DEL CUERPO RIGIDO 126
Ademas, si se utiliza ahora el enfoque pasivo y se considera la accion de unamatriz B sobre el sistema de coordenadas, las componentes del vector G seranahora
BG = BAF. (4.2.13)
Esta expresion se puede reescribir introduciendo una matriz identidad ade-cuadamente,
BG = BA1F = BAB�1BF =�
BAB�1
�
BF = A0BF, (4.2.14)
donde en la ultima igualdad se ha considerado la ecuacion (4.2.12) y A0 re-presenta el operador A en el nuevo sistema de coordenadas y que esta dadopor
A0 = BAB�1. (4.2.15)
A esta relacion se le conoce como transformacion de semejanza o de simila-ridad. Ahora bien, esta ecuacion puede reescribirse como
A0B = BA. (4.2.16)
Al tomar el determinante de esta expresion,
det [A0B] = det [BA] , (4.2.17)
y debido a las propiedades de los determinantes,
det [A0] det [B] = det [B] det [A] (4.2.18)
det [A0] = det [A] , (4.2.19)
es decir que el determinante de una matriz es invariante bajo una transformacionlineal.
Ahora bien, de la condicion de ortogonalidad para la matriz A se tiene
det [A] deth
Ai
= det [1] = 1, (4.2.20)
y ya que el determinante de la matriz transpuesta es igual al de la matriz original(el determinante no cambia si se intercambian filas y columnas), se tiene
(det [A])2 = 1, (4.2.21)
lo que implica que el determinante de una matriz ortogonal solo puede tomardos valores,
det [A] = ±1. (4.2.22)

CAPITULO 4. CINEMATICA DEL CUERPO RIGIDO 127
El signo menos no sirve para representar rotaciones, ya que una matriz coneste determinante, como por ejemplo
2
4
�1 0 00 �1 00 0 �1
3
5 (4.2.23)
produce una inversion en los ejes (la cual nunca se puede obtener para un cuerporigido ya que no existe forma de invertir ejes mediante rotaciones sin utilizar almenos una refleccion). Por esta razon se consideraran solamente matrices condet [A] = +1, denominadas matrices ortogonales propias.
4.3. Angulos de Euler
Como se analizo anteriormente, los nueve angulos ✓ij no son independientesentre sı, y por esta razon no sirven como coordenadas generalizadas. Las seisrelaciones de ortogonalidad dan como resultado que solo se tienen tres gradosde libertad y por ello para determinar la orientacion de un cuerpo rıgido senecesitaran solamente 3 angulos. Aun cuando la escogencia de los angulos escompletamente arbitaria, la eleccion mas comun corresponde a los denominadosAngulos de Euler.
Para obtener un sistema de coordenadas cartesiano a partir de otro se puederealizar mediante tres rotaciones sucesivas en un orden especıfico. La convencionque se describira aqui corresponde a la utilizada en la mecanica celeste. Pararepresentar las rotaciones alrededor de los diferentes ejes se utilizara la notacionmatricial
R1
(') =
0
@
1 0 00 cos' sin'0 � sin' cos'
1
A rotacion con respecto al primer eje de coordenadas
R2
(') =
0
@
cos' 0 � sin'0 1 0
sin' 0 cos'
1
A rotacion con respecto al segundo eje de coordenadas
R3
(') =
0
@
cos' sin' 0� sin' cos' 0
0 0 1
1
A rotacion con respecto al tercer eje de coordenadas.
Partiendo del sistema xyz, se rota en un angulo � en contra de las manecillasdel reloj y alrededor del eje z. Con ello se obtiene el sistema de ejes ⇠⌘⇣. Noteseque esta rotacion se puede representar matematicamente como
0
@
⇠⌘⇣
1
A = R3
(�)
0
@
xyz
1
A . (4.3.1)
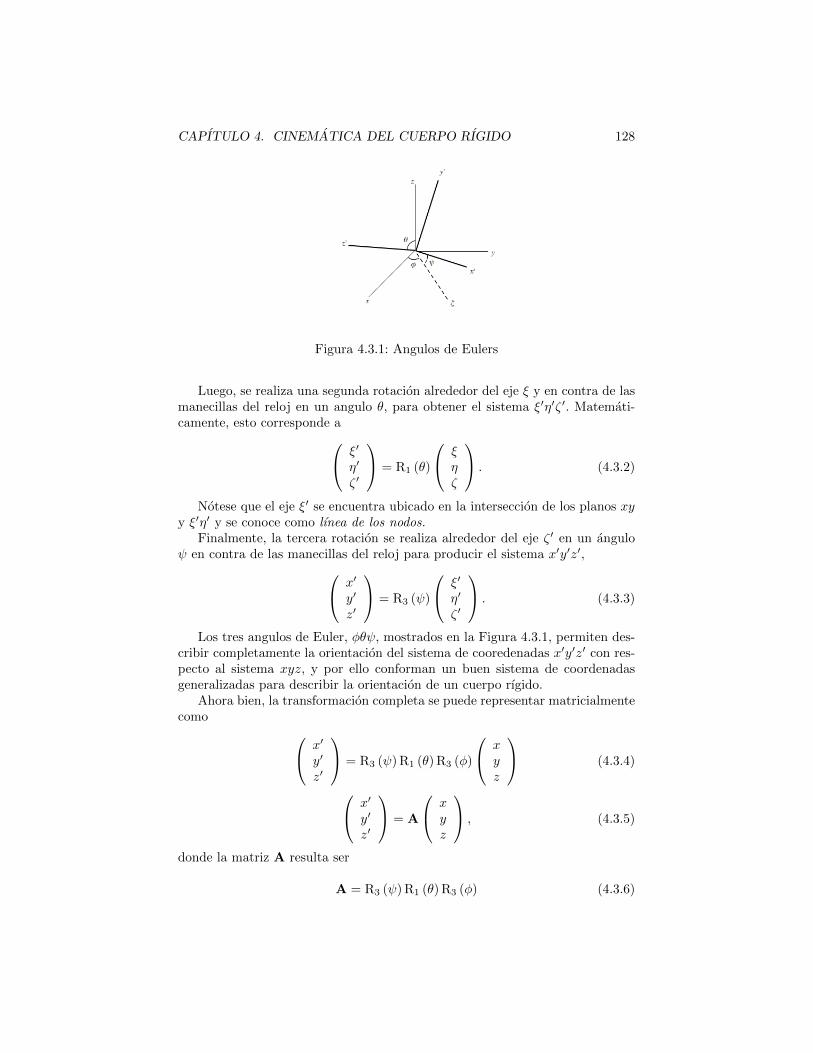
CAPITULO 4. CINEMATICA DEL CUERPO RIGIDO 128
Figura 4.3.1: Angulos de Eulers
Luego, se realiza una segunda rotacion alrededor del eje ⇠ y en contra de lasmanecillas del reloj en un angulo ✓, para obtener el sistema ⇠0⌘0⇣ 0. Matemati-camente, esto corresponde a
0
@
⇠0
⌘0
⇣ 0
1
A = R1
(✓)
0
@
⇠⌘⇣
1
A . (4.3.2)
Notese que el eje ⇠0 se encuentra ubicado en la interseccion de los planos xyy ⇠0⌘0 y se conoce como lınea de los nodos.
Finalmente, la tercera rotacion se realiza alrededor del eje ⇣ 0 en un angulo en contra de las manecillas del reloj para producir el sistema x0y0z0,
0
@
x0
y0
z0
1
A = R3
( )
0
@
⇠0
⌘0
⇣ 0
1
A . (4.3.3)
Los tres angulos de Euler, �✓ , mostrados en la Figura 4.3.1, permiten des-cribir completamente la orientacion del sistema de cooredenadas x0y0z0 con res-pecto al sistema xyz, y por ello conforman un buen sistema de coordenadasgeneralizadas para describir la orientacion de un cuerpo rıgido.
Ahora bien, la transformacion completa se puede representar matricialmentecomo
0
@
x0
y0
z0
1
A = R3
( )R1
(✓)R3
(�)
0
@
xyz
1
A (4.3.4)
0
@
x0
y0
z0
1
A = A
0
@
xyz
1
A , (4.3.5)
donde la matriz A resulta ser
A = R3
( )R1
(✓)R3
(�) (4.3.6)

CAPITULO 4. CINEMATICA DEL CUERPO RIGIDO 129
A =
0
@
cos sin 0� sin cos 0
0 0 1
1
A
0
@
1 0 00 cos ✓ sin ✓0 � sin ✓ cos ✓
1
A
0
@
cos� sin� 0� sin� cos� 0
0 0 1
1
A
A =
0
@
cos sin 0� sin cos 0
0 0 1
1
A
0
@
cos� sin� 0� cos ✓ sin� cos ✓ cos� sin ✓sin ✓ sin� � sin ✓ cos� cos ✓
1
A (4.3.7)
A =
0
@
cos cos�� sin cos ✓ sin� cos sin�+ sin cos ✓ cos� sin sin ✓� sin cos�� cos cos ✓ sin� � sin sin�+ cos cos ✓ cos� cos sin ✓
sin ✓ sin� � sin ✓ cos� cos ✓
1
A .
(4.3.8)
4.4. Teorema de Euler para el Movimiento deun Cuerpo Rigido
Como se observo, la orientacion de un cuerpo rıgido se puede expresar conayuda de los tres angulos de Euler y mediante la matriz de transformacion A.Con esto en mente, es posible enunciar el teorema de Euler sobre el movimientode un cuerpo rıgido, el cual se puede escribir como
“ El desplazamiento general de un cuerpo rıgido con un punto fijo es unarotacion alrededor de un eje”.
Este teorema quiere decir que para cualquier movimiento de un cuerpo rıgi-do con un punto fijo se puede encontrar un eje que pase por ese punto fijo yorientado mediante un par de angulos ✓ y � de tal forma que la rotacion en unangulo con respecto a este eje, reproduzca el movimiento del cuerpo rıgido.
Ahora bien, si el punto fijo se toma como origen del sistema de ejes quedescribiran el movimiento, no existiran traslaciones sino unicamente rotacionesinvolucradas, y por ello la transformacion general que describira el movimientoestara representada por la matriz A definida arriba. Ahora bien, en toda trans-formacion de este estilo, el eje de rotacion es inalterado, y por esta razon, unvector en direccion de este eje no se ve afectado. Ası, para probar el teorema deEuler debe mostrarse que existe un vector ~R que tenga las mismas componentesantes y despues de la rotacion. Esto es,
~R0 = A~R = ~R. (4.4.1)
Esta ecuacion es unc aso particular de la ecuacion general de valores propiospara la matriz A,
~R0 = A~R = �~R, (4.4.2)

CAPITULO 4. CINEMATICA DEL CUERPO RIGIDO 130
donde � es, precisamente, uno de lo eigenvalores de la matriz A. De esta forma,para probar el teorema de Euler, lo que se debe comprobar es que uno de losvalores propios de A es � = +1. Ya que la matriz que representa una rotacionno cambia la magnitud de los vectores, se tiene para todo valor propio
�
�
�
A~R�
�
�
2
=�
�
�
�~R�
�
�
2
= |�|2�
�
�
~R�
�
�
2
=�
�
�
~R�
�
�
2
, (4.4.3)
es decir que los tres eigenvalores deben satisfacer
|�1
|2 = |�2
|2 = |�3
|2 = 1. (4.4.4)
Se designaran las componente la matriz como
A =
2
4
a11
a12
a13
a21
a22
a23
a31
a32
a33
3
5 (4.4.5)
y las componentes del vector como
~R =
0
@
x1
x2
x3
1
A . (4.4.6)
De esta forma la ecuacion de eigenvalores sera
(A� �1) ~R = 0 (4.4.7)
0
@
a11
� � a12
a13
a21
a22
� � a23
a31
a32
a33
� �
1
A
0
@
x1
x2
x3
1
A = 0. (4.4.8)
Para que exista una solucion no trivial debe cumplirse que su determinante nosea nulo,
det [A� �1] = 0, (4.4.9)
condicion que se conoce como la ecuacion caracterıstica o secular para la matrizy que debe complirse para cada uno de los valores propios.
Para comprobar el teorema de Euler solo es necesario notar que
(A� 1) A = 1� A, (4.4.10)
debido a que la matriz A debe ser ortogonal (lo que implica que AA = AA = 1). De esta forma, si se toma el determinante de esta expresion,
det [A� 1] deth
Ai
= deth
1� Ai
, (4.4.11)
pero ya que A es ortogonal, deth
Ai
= det [A] = 1, se tiene

CAPITULO 4. CINEMATICA DEL CUERPO RIGIDO 131
det [A� 1] = det [1�A] . (4.4.12)
De las propiedades de los determinantes se sabe que para toda matriz detamano n⇥ n se satisface
det [�B] = (�1)n det [B] . (4.4.13)
En nuestro casose tienen matrices de tamano 3⇥ 3 y por ello se puede escribir
det [A� 1] = det [1�A] = (�1)3 det [A� 1] (4.4.14)
det [A� 1] = 0. (4.4.15)
Comparando esta relacion con la ecuacion secular se observa que uno de losvalores propios debe ser � = +1.
Ahora bien, si se denotan los valores propios como �k y sus correspondientesvectores propios por Rk = (x
1k, x2k, x3k), las ecuaciones de valores propios sepueden escribir de forma compacta como
3
X
j=1
aijxjk = �kxik. (4.4.16)
Si se define una matriz formada a partir de los vectores propios en la forma
X =
2
4
x11
x12
x13
x21
x22
x23
x31
x32
x33
3
5 , (4.4.17)
se puede reescribir la ecuacion de valores propios como
3
X
j=1
aijxjk =3
X
j=1
xij�jk�k (4.4.18)
donde el factor �jk�k define una matriz ⇤ cuyos elementos son los valores pro-pios,
⇤ =
2
4
�1
0 00 �
2
00 0 �
3
3
5 . (4.4.19)
En terminos matriciales, la ecuacion sera ahora
AX = ⇤X, (4.4.20)
o tambien
X�1AX = ⇤. (4.4.21)
Tomando el determinante de esta ecuacion, se tiene

CAPITULO 4. CINEMATICA DEL CUERPO RIGIDO 132
det⇥
X�1AX⇤
= det⇥
X�1
⇤
det [A] det [X] = det [⇤] (4.4.22)
det [X]�1 det [A] det [X] = �1
�2
�3
(4.4.23)
det [A] = �1
�2
�3
. (4.4.24)
Como se mostro antes, si la matriz A es ortogonal se cumple det [A] = ±1, perosi se consideran unicamente las transformaciones propias (i.e. no inversiones deejes) debe tomarse solamente el signo positivo y por ello
�1
�2
�3
= 1. (4.4.25)
Ya que al menos uno de los eigenvalores (por ejemplo �1
) debe ser real eigual a �
1
= +1, esta ecuacion resulta en
�2
�3
= 1. (4.4.26)
Ası, se pueden analizar tres casos posibles para los dos valores propios res-tantes:
Caso 1. En el caso trivial, la matriz de transformacion es la identidad, ypor ello
�1
= �2
= �3
= 1. (4.4.27)
Caso 2. �1
= +1 y los otros dos valores propios son negativos, �2
= �3
= �1.Caso 3. �
1
= +1 y los otros dos valores propios son complejos conjugadosmutuos, es decir �
2
= �3
. Ası, se tiene
�2
�3
= �3
�3
= �2
�2
= 1 (4.4.28)
|�3
|2 = |�2
|2 = 1. (4.4.29)
Ası, se tiene, por ejemplo, �2
= ei', �3
= e�i'.
4.4.1. Transformacion de Similaridad
Si la matriz B define un cambio de coordenadas de la forma
B : (x, y, z)! (X,Y, Z) , (4.4.30)
y la matriz A representa una rotacion en el sistema (x, y, z) tal que
A : (x, y, z) ! (x, y, z)
~r ! ~r0 = A~r

CAPITULO 4. CINEMATICA DEL CUERPO RIGIDO 133
entonces la transformacion de similaridad de la matriz A da lugar a unamatriz que representa rotaciones en el sistema (X,Y, Z),
BAB�1 : (X,Y, Z) ! (X,Y, Z)
~s ! ~s0 =�
BAB�1
�
~s
4.5. Tensor de Inercia
El Tensor de Inercia I relaciona los vectores momento angular ~L y velocidadangular ~!,
~L = I~!. (4.5.1)
Si se considera un cambio de coordenadas representado por la matriz A setiene que
~L0 = A~L = A (I~!) = AIA�1A~! = AIA�1~!0 (4.5.2)
~L0 = I0~!0, (4.5.3)
donde se ha definidoI0 = AIA�1. (4.5.4)
El caracter tensorial de I se puede observar al considerar esta relacion de simi-laridad en componentes. Notese que si las componentes de la matriz de trans-formacion se denotan por aij , entonces las componentes de la inversa seran aji(ya que para una matriz ortogonal A�1 = A). De esta forma se tiene
I 0ij =X
k,l
aikIklajl. (4.5.5)
4.6. Rotaciones Infinitesimales
Aun cuando las rotaciones finitas no pueden representarse por vectores (yaque no cunmplen con la conmutatividad de la adicion), si se puede asociar un“vector” a las rotaciones infinitesimales. Para comprender esto, considerese unvector ~r al cual se aplica una rotacioninfinitesimal. Cada una de las coordenadasdel vector cambiara en una cantidad muy pequena para dar lugar a un nuevovector ~r0 cuyas componentes seran
x01
= x1
+ ✏11
x1
+ ✏12
x2
+ ✏13
x3
(4.6.1)
x02
= x2
+ ✏21
x1
+ ✏22
x2
+ ✏23
x3
(4.6.2)
x03
= x3
+ ✏31
x1
+ ✏32
x2
+ ✏33
x3
, (4.6.3)

CAPITULO 4. CINEMATICA DEL CUERPO RIGIDO 134
donde las cantidades ✏ij son infinitesimales. Este conjunto de expresiones sepuede escribir en forma resumida como
x0i = xi +
3
X
j=1
✏ijxj (4.6.4)
o tambien
x0i =
3
X
j=1
(�ij + ✏ij)xj . (4.6.5)
En notacion matricial se puede escribir
~r0 = (1+ ✏)~r (4.6.6)
donde la matriz de transformacion (1+ ✏) es la matriz identidad afectada porun operador infinitesimal. Ahora bien, la aplicacion consecutiva de dos trans-formaciones infinitesimales resulta en el operador
(1+ ✏1) (1+ ✏2) = 1+ ✏1 + ✏2 + ✏1✏2 = 1+ ✏1 + ✏2 +O�
✏2�
. (4.6.7)
Si se desprecian ordenes superiores al primero en el operador infinitesimal, setiene
(1+ ✏1) (1+ ✏2) = 1+ ✏1 + ✏2 = (1+ ✏2) (1+ ✏1) , (4.6.8)
es decir que los operadores de transformacion infinitesimales conmutan a primerorden en ✏.
Ahora bien, la inversa de la matriz de transformacion infinitesimal A =(1+ ✏) esta dada por
A�1 = (1� ✏) , (4.6.9)
ya que a primer orden se tiene
A�1A = AA�1 = (1+ ✏) (1� ✏) = 1+ ✏� ✏ = 1. (4.6.10)
Si se considera una rotacion finita alrededor del eje z, esta se representa porla matriz
R3
(✓) =
0
@
cos✓ sin ✓ 0� sin ✓ cos ✓ 0
0 0 1
1
A . (4.6.11)
Si la rotacion es en un angulo infinitesimal d✓, se pueden realizar las aproxima-ciones

CAPITULO 4. CINEMATICA DEL CUERPO RIGIDO 135
sin d✓ ' d✓ (4.6.12)
cos d✓ ' 1, (4.6.13)
y por ello la matriz de transformacion sera
1+ ✏ =
0
@
1 d✓ 0�d✓ 1 00 0 1
1
A . (4.6.14)
Ası, la matriz infinitesimal se puede escribir como
✏ =
0
@
0 d✓ 0�d✓ 0 00 0 0
1
A = d✓
0
@
0 1 0�1 0 00 0 0
1
A . (4.6.15)
Es claro que la matriz ✏ es antisimetrica, es decir que es igual al negativo desu transpuesta,
✏ = �✏. (4.6.16)
Si ahora se consideran rotaciones infinitesimales alrededor de los tres ejes, esfacil mostrar que la matriz ✏ que representa la transformacion se puede escribiren la forma general
✏ =
0
@
0 d⌦3
�d⌦2
�d⌦3
0 d⌦1
d⌦2
�d⌦1
0
1
A , (4.6.17)
donde d⌦1
.d⌦2
y d⌦3
son los tres parametros que determinan la rotacion(angulos de rotacion alrededor de cada uno de los ejes).
4.6.1. El pseudovector d~⌦
El cambio de un vector bajo una transformacion infinitesimal esta dado por
d~r = ~r0 � ~r, (4.6.18)
y debido a (4.6.6),
d~r = ✏~r. (4.6.19)
Expandiendo esta expresion en terminos de las componentes del vector y de lamatriz infinitesimal se tiene
dx1
= x2
d⌦3
� x3
d⌦2
(4.6.20)
dx2
= x3
d⌦1
� x1
d⌦3
(4.6.21)
dx3
= x1
d⌦2
� x2
d⌦1
. (4.6.22)

CAPITULO 4. CINEMATICA DEL CUERPO RIGIDO 136
Notese que el lado derecho de esta expresion puede escribirse en la forma delproducto vectorial
d~r = ~r ⇥ d~⌦ (4.6.23)
donde se ha definido
d~⌦ =
0
@
d⌦1
d⌦2
d⌦3
1
A . (4.6.24)
Aun cuando la notacion parece indicar que d~⌦ es un vector debe comprobarsecomo transforma este objeto matematico bajo una transformacion ortogonalpara poder asegurarlo. Para ello, notese que si d~⌦ fuese un vector y se le aplicauna matriz ortogonal B a d~⌦ deberıan obtenerse las componentes
d⌦0i =
3
X
j=1
bijd⌦j . (4.6.25)
Ahora bien, bajo la transformacion B, el vector d~r transforma de acuerdo con
d~r0 = Bd~r (4.6.26)
y debido a (4.6.19),
d~r0 = B✏~r = B✏B�1B~r = ✏0B~r = ✏0~r0, (4.6.27)
donde ✏0 = B✏B�1 es la matriz infinitesimal afectada por la transformacion desimilitud. Las componentes de esta nueva matriz estan dadas por
✏0jk =3
X
m,n=1
bjm✏mnbkn. (4.6.28)
Ya que la propiedad de antisimetria se conserva bajo una transformacion or-togonal, se puede asegurar que ✏0 es antisimetrico y por ello esta ultima ecuacionpuede escribirse en forma similar a (4.6.23), i.e.
d~r0 = ~r0 ⇥ d~⌦0. (4.6.29)
Las cantidades d⌦i estan relacionadas con las componentes ✏ij de la matriz✏ mediante
d⌦i =1
2
3
X
j,k=1
�ijk✏jk (4.6.30)
donde �ijk es la densidad de Levi-Civita definida por
CAPITULO 4. CINEMATICA DEL CUERPO RIGIDO 137
�ijk =
8
>
<
>
:
+1 si ijkes una permutacion par de 123
�1 si ijkes una permutacion impar de 123
0 en otro caso.
(4.6.31)
EjemploConsiderese la componente d⌦
1
. De acuerdo con (4.6.30) esta debe co-rresponder a
d⌦1
=1
2
3
X
j,k=1
�1jk✏jk.
Esto es
d⌦1
=1
2(�
123
✏23
+ �132
✏32
)
d⌦1
=1
2(✏
23
� ✏32
) .
Ya que la matriz ✏ es antisimetrica, se tiene ✏23
= �✏32
, y por ello
d⌦1
= ✏23
.
La densidad de Levi-Civita permite escribir tambien la relacion inversa
✏mn =3
X
l=1
�lmnd⌦l. (4.6.32)
EjemploConsiderese la componente ✏
23
. De acuerdo con (4.6.32) esta debe ser
✏23
=3
X
l=1
�l23d⌦l.
Esto es
✏23
= �123
d⌦1
✏23
= d⌦1
.
De la misma forma, en el nuevo sistema de coordenadas se debe tener
d⌦0i =
1
2
3
X
j,k=1
�ijk✏0jk (4.6.33)

CAPITULO 4. CINEMATICA DEL CUERPO RIGIDO 138
y reemplazando✏0jk de la ecuacion (4.6.28),
d⌦0i =
1
2
3
X
j,k=1
�ijk
3
X
m,n=1
bjm✏mnbkn (4.6.34)
d⌦0i =
1
2
3
X
j,k,m,n=1
�ijkbjmbkn✏mn. (4.6.35)
Utilizando (4.6.32), se tiene
d⌦0i =
1
2
3
X
j,k,m,n=1
�ijkbjmbkn
3
X
l=1
�lmnd⌦l (4.6.36)
d⌦0i =
1
2
3
X
j,k,l,m,n=1
�ijk�lmnbjmbknd⌦l. (4.6.37)
El determinante de la matriz B se puede escribir como
det [B] =3
X
l,m,n=1
�lmnbilbjmbkn (4.6.38)
si ijk corresponden a una permutacion par de 123 (notese que si los ındicesijk corresponden a una permutacion impar de 123 el resultado sera � det [B]).
EjemploSi los indices i, j, k son 1, 2, 3 respectivamente, la ecuacion (4.6.38) es
det [B] =3
X
l,m,n=1
�lmnb1lb2mb3n
det [B] = �123
b11
b22
b33
+ �132
b11
b23
b32
+ �213
b12
b21
b33
+�231
b12
b23
b31
+ �321
b13
b22
b31
+ �312
b13
b21
b32
det [B] = b11
b22
b33
� b11
b23
b32
� b12
b21
b33
+ b12
b23
b31
� b13
b22
b31
+ b13
b21
b32
det [B] = b11
(b22
b33
� b23
b32
)� b12
(b21
b33
� b23
b31
) + b13
(b21
b32
� b22
b31
) ,
que coincide con el calculo usual del determinante de B.
De esta forma, al tener en cuenta tanto las permutaciones pares como impa-res de los indices ijk se puede escribir
det [B] =1
2
3
X
j,k,l,m,n=1
�ijk�lmnbilbjmbkn (4.6.39)
CAPITULO 4. CINEMATICA DEL CUERPO RIGIDO 139
para cada uno de los valores de i, y donde se ha introducido el factor 1
2
paraevitar la doble contribucion en la suma. Esta expresion se puede reescribir como
det [B] =1
2
3
X
l=1
bil
3
X
j,k,m,n=1
�ijk�lmnbjmbkn. (4.6.40)
Ya que la matriz B es ortogonal (i.e.P
3
l=1
b2il = 1), se tiene
3
X
l=1
b2il det [B] =1
2
3
X
l=1
bil
3
X
j,k,m,n=1
�ijk�lmnbjmbkn (4.6.41)
3
X
l=1
bil (bil det [B]) =3
X
l=1
bil1
2
0
@
3
X
j,k,m,n=1
�ijk�lmnbjmbkn
1
A . (4.6.42)
Identificando cada termino a lado y lado de la ecuacion se obtiene
bil det [B] =1
2
3
X
j,k,m,n=1
�ijk�lmnbjmbkn, (4.6.43)
y al reemplazar este resultado en la ecuacion (4.6.25)
d⌦0i =
3
X
l=1
bil det [B] d⌦l, (4.6.44)
es decir
d⌦0i = det [B]
3
X
l=1
bild⌦l. (4.6.45)
Si se compara esta ecuacion con la relacion que deberıa satisfacer d~⌦ para trans-formar como vector, (4.6.25), se observa como en esta expresion aparece el factorextra det [B]. Con ello podemos concluir que si la transformacion ortogonal espropia (i.e. det [B] = +1), se tiene que d~⌦ transforma como un vector, pero sise consideran las transformaciones ortogonales impropias (i.e. det [B] = �1), setiene que d~⌦ transforma con un signo menos adicional.
Las cantidades que transforman bajo transformaciones ortogonales en estamanera se conocen como vectores axiales o Pseudovectores. Es posible demostrarque el producto cruz entre dos vectores ~A y ~B da como resultado un pseudovec-tor, ~C = ~A⇥ ~B, ya que sus componentes pueden escribirse como
Ci = AjBk �AkBj (4.6.46)
con ijk en orden cıclico. Se nota entonces que bajo una inversion de ejes, lascomponentes de ~A y ~B cambian de signo mientras que las componentes de ~Cno cambian.

CAPITULO 4. CINEMATICA DEL CUERPO RIGIDO 140
Por otro lado, el producto interno de un vector y un pseudovector se llamapseudoescalar, ya que es una cantidad que cambia de signo bajo una transfor-macion impropia.
4.7. Razon de Cambio de un Vector
Suponga un vector ~G medido con respecto a los ejes del cuerpo (x0, y0, z0).su cambio en un intervalo de tiempo dt difiere del correspondiente cambio delmismo vector definido con respecto a los ejes del espacio (x, y, z) unicamentepor el efecto de la rotacion del sistema del cuerpo con respecto al sistema delespacio. Esto es
⇣
d ~G⌘
c=⇣
d ~G⌘
e+⇣
d ~G⌘
rotacion. (4.7.1)
En la seccion anterior se mostro que el cambio de un vector bajo una rotacioninfinitesimal es
⇣
d ~G⌘
rotacion= ~G⇥ d~⌦. (4.7.2)
Por lo tanto,⇣
d ~G⌘
c=⇣
d ~G⌘
e+ ~G⇥ d~⌦, (4.7.3)
o equivalentemente⇣
d ~G⌘
e=⇣
d ~G⌘
c+ d~⌦⇥ ~G. (4.7.4)
Si se divide entre el intervalo de tiempo en el que se produce el cambio,
d ~G
dt
!
e
=
d ~G
dt
!
c
+ ~! ⇥ ~G, (4.7.5)
donde se ha definido la velocidad angular de la rotacion del sistema del cuerpo
como ~! = d~⌦dt . Ahora bien, ya que en esta deduccion no se ha tenido en cuenta
ninguna restriccion para el vector ~G, esta relacion se puede escribir en forma deoperadores,
✓
d
dt
◆
e
=
✓
d
dt
◆
c
+ ~! ⇥ . (4.7.6)
4.8. Velocidad Angular en terminos de los an-gulos de Euler
La velocidad angular del sistema del cuerpo con respecto al sistema delespacio, ~!, puede ser expresada en terminos de tres rotaciones infinitesimales
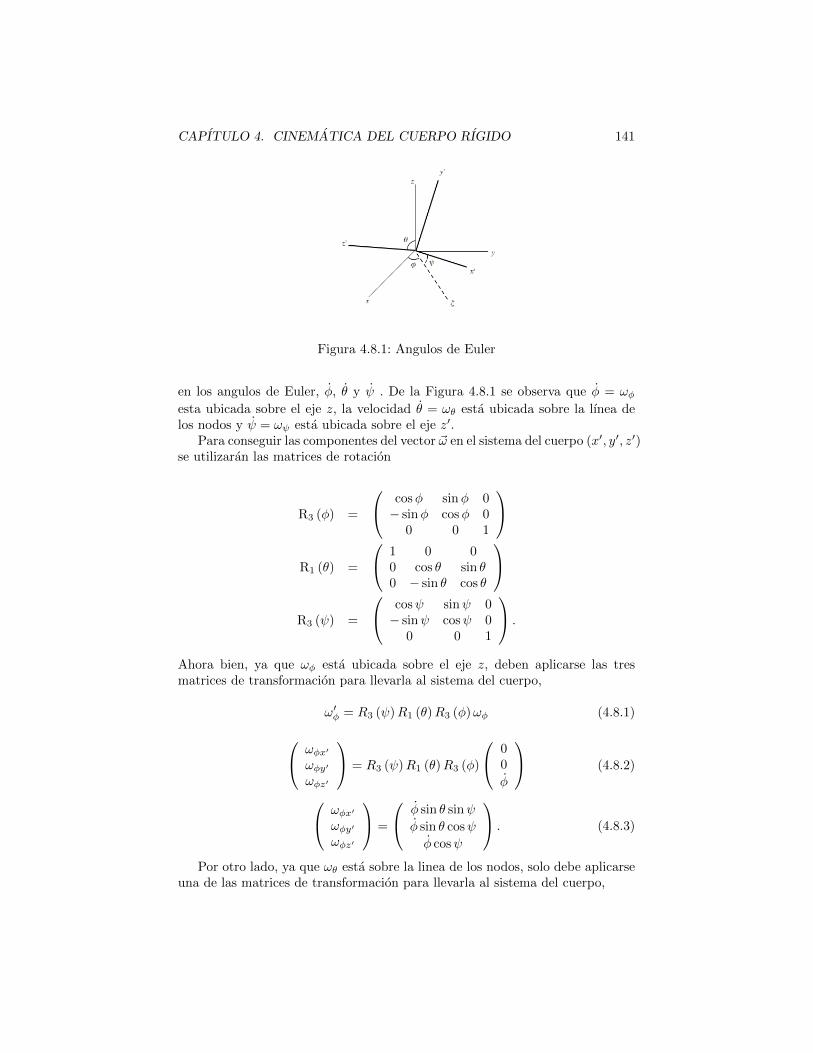
CAPITULO 4. CINEMATICA DEL CUERPO RIGIDO 141
Figura 4.8.1: Angulos de Euler
en los angulos de Euler, �, ✓ y . De la Figura 4.8.1 se observa que � = !�esta ubicada sobre el eje z, la velocidad ✓ = !✓ esta ubicada sobre la lınea delos nodos y = ! esta ubicada sobre el eje z0.
Para conseguir las componentes del vector ~! en el sistema del cuerpo (x0, y0, z0)se utilizaran las matrices de rotacion
R3
(�) =
0
@
cos� sin� 0� sin� cos� 0
0 0 1
1
A
R1
(✓) =
0
@
1 0 00 cos ✓ sin ✓0 � sin ✓ cos ✓
1
A
R3
( ) =
0
@
cos sin 0� sin cos 0
0 0 1
1
A .
Ahora bien, ya que !� esta ubicada sobre el eje z, deben aplicarse las tresmatrices de transformacion para llevarla al sistema del cuerpo,
!0� = R
3
( )R1
(✓)R3
(�)!� (4.8.1)
0
@
!�x0
!�y0
!�z0
1
A = R3
( )R1
(✓)R3
(�)
0
@
00�
1
A (4.8.2)
0
@
!�x0
!�y0
!�z0
1
A =
0
@
� sin ✓ sin � sin ✓ cos � cos
1
A . (4.8.3)
Por otro lado, ya que !✓ esta sobre la linea de los nodos, solo debe aplicarseuna de las matrices de transformacion para llevarla al sistema del cuerpo,
CAPITULO 4. CINEMATICA DEL CUERPO RIGIDO 142
!0✓ = R
3
( )!✓ (4.8.4)
0
@
!✓x0
!✓y0
!✓z0
1
A = R3
( )
0
@
✓00
1
A (4.8.5)
0
@
!✓x0
!✓y0
!✓z0
1
A =
0
@
✓ cos �✓ sin
0
1
A . (4.8.6)
Por ultimo, ! esta ubicada sobre el eje z0, es decir que ya se encuentradefinida en el sistema del cuerpo,
0
@
! x0
! y0
! z0
1
A =
0
@
00
1
A . (4.8.7)
De esta forma, la velocidad angular completa en el sistema del cuerpo resultaser
0
@
!x0
!y0
!z0
1
A =
0
@
!�x0
!�y0
!�z0
1
A+
0
@
!✓x0
!✓y0
!✓z0
1
A+
0
@
! x0
! y0
! z0
1
A . (4.8.8)
Esto da como resultado las componentes
8
>
<
>
:
!x0 = � sin ✓ sin + ✓ cos
!y0 = � sin ✓ cos � ✓ sin !z0 = � cos ✓ + .
(4.8.9)
4.8.1. Fuerza de Coriolis
Si se considera una partıcula con vector posicion ~r medida con respecto alespacio, al aplicar el operador para la razon de cambio (4.7.6) se obtiene
✓
d~r
dt
◆
e
=
✓
d~r
dt
◆
c
+ ~! ⇥ ~r (4.8.10)
~ve = ~vc + ~! ⇥ ~r, (4.8.11)
donde~ve es la velocidad de la partıcula medida en el sistema del espacio y ~vc essu velocidad medida en el sistema del cuerpo. Al aplicar de nuevo el operadorpara la razon de cambio se tiene
✓
d~vedt
◆
e
=
✓
d~vedt
◆
c
+ ~! ⇥ ~ve. (4.8.12)

CAPITULO 4. CINEMATICA DEL CUERPO RIGIDO 143
El lado izquierdo se identifica con la aceleracion de la partıcula medida en elsistema del espacio y por ello
~ae =
✓
d
dt[~vc + ~! ⇥ ~r]
◆
c
+ ~! ⇥ [~vc + ~! ⇥ ~r] (4.8.13)
~ae =
✓
d~vcdt
◆
c
+
✓
d
dt[~! ⇥ ~r]
◆
c
+ ~! ⇥ ~vc + ~! ⇥ (~! ⇥ ~r) . (4.8.14)
El primer termino de la derecha corresponde a la aceleracion de la partıculamedida en el sistema del cuerpo, ~ac =
�
d~vc
dt
�
c,
~ae = ~ac + ~! ⇥ ~vc + ~! ⇥ ~vc + ~! ⇥ (~! ⇥ ~r) (4.8.15)
~ae = ~ac + 2~! ⇥ ~vc + ~! ⇥ (~! ⇥ ~r) . (4.8.16)
Si se mutiplica esta relacion por la masa de la partıcula, se obtiene una expresionpara la fuerza medida en el sistema del cuerpo,
~F = m~ac = m~ae � 2m~! ⇥ ~vc �m~! ⇥ (~! ⇥ ~r) . (4.8.17)
Es facil observar que el primer termino , m~ae, es la fuerza medida en el siste-ma del espacio. Por otro lado, el tercer termino, �m~!⇥(~! ⇥ ~r), es perpendiculara ~! y apunta hacia afuera. Ademas su magnitud es m!2r sin ✓, con ✓ el anguloentre la velocidad angular y el vector posicion. Por estas razones concluimos queeste termino corresponde a la fuerza centrifuga. Notese que cuando la partıculaesta en reposo con respecto al sistema rotante, este termino no desaparece.
Finalmente, el segundo termino, �2m~! ⇥ ~vc, depende del movimiento de lapartıcula con respecto al sistema del cuerpo y se conoce como fuerza de Coriolis.
4.9. Velocidad angular y origen del sistema decoordenadas
En esta seccion se mostrara que la velocidad angular ~! del sistema de coor-denadas fijo al cuerpo es independiente de la ubicacion de su origen. Para ellose consideraran dos origenes O
1
y O2
y se definira ~R1
como el vector de posicionde O
1
con respecto al sistema del espacio mientras que ~R2
es el vector posicionde O
2
como se observa en la Figura 4.9.1. El vector ~R corresponde al vector deposicion del origen O
2
con respecto a O1
. De esta forma se tiene
~R = ~R2
� ~R1
. (4.9.1)
Primero se realizara un analisis con respecto a O1
. Al aplicar el operadorpara la razon de cambio (4.7.6) del vector ~R
2
se tiene

CAPITULO 4. CINEMATICA DEL CUERPO RIGIDO 144
Figura 4.9.1: Relacion entre la velocidad angular y el origen del sistema decoordenadass
d~R2
dt
!
e
=
d~R1
dt
!
e
+
d~R
dt
!
e
(4.9.2)
d~R2
dt
!
e
=
d~R1
dt
!
e
+
d~R
dt
!
c
+ ~!1
⇥ ~R, (4.9.3)
pero la razon de cambio de ~R vista desde el sistema del cuerpo es cero y porello el segundo termino de la derecha desaparece,
d~R2
dt
!
e
=
d~R1
dt
!
e
+ ~!1
⇥ ~R. (4.9.4)
Por otro lado, al analizar con respecto a O2
la razon de cambio del vector~R1
es
d~R1
dt
!
e
=
d~R2
dt
!
e
�
d~R
dt
!
e
(4.9.5)
d~R1
dt
!
e
=
d~R2
dt
!
e
�
d~R
dt
!
c
� ~!2
⇥ ~R (4.9.6)
y de nuevo la razon de cambio de ~R con respecto al sistema del cuerpo es nula,
d~R1
dt
!
e
=
d~R2
dt
!
e
� ~!2
⇥ ~R. (4.9.7)
De esta forma, a partir de las ecuaciones (4.9.4) y (4.9.7) se tiene
d~R2
dt
!
e
�
d~R1
dt
!
e
= ~!2
⇥ ~R = ~!1
⇥ ~R (4.9.8)

CAPITULO 4. CINEMATICA DEL CUERPO RIGIDO 145
de donde
(~!2
� ~!1
)⇥ ~R = 0 (4.9.9)
y por esta razon concluimos que la velocidad angular es independiente de laeleccion de sistema de coordenadas, como se queria demostrar,
~!2
= ~!1
. (4.9.10)

Capıtulo 5
Dinamica del CuerpoRıgido
5.1. Momento Angular del Cuerpo Rıgido
Como es conocido, el momento angular de una partıcula puntual con masami esta dado por
~li = mi (~ri ⇥ ~vi) , (5.1.1)
con ~ri y ~vi los vectores posicion y velocidad de la partıcula con respecto alsistema del espacio, respectivamente. Si se considera que el cuerpo rıgido estaformado por N�partıculas, el momento angular total se puede escribir como lasuma de los momentos angulares de cada una de las partıculas,
~l =NX
i=1
~li =NX
i=1
mi (~ri ⇥ ~vi) . (5.1.2)
Deibido al operador para la razon de cambio de un vector (4.7.6) se tiene
✓
d~ridt
◆
e
=
✓
d~ridt
◆
c
+ ~! ⇥ ~ri, (5.1.3)
pero ya que el cuerpo es rıgido, las particulas que lo componen no cambian suposicion relativa entre ellas ni con respecto al punto elegido como origen delsistema de coordenadas del cuerpo, i.e.
�
d~ri
dt
�
c= 0, y por ello
✓
d~ridt
◆
e
= ~vi = ~! ⇥ ~ri. (5.1.4)
De esta forma el momento angular del cuerpo rıgido es
~l =NX
i=1
mi (~ri ⇥ (~! ⇥ ~ri)) . (5.1.5)
146

CAPITULO 5. DINAMICA DEL CUERPO RIGIDO 147
5.2. El tensor de Inercia
Utilizando la identidad vectorial ~A⇥⇣
~B ⇥ ~C⌘
=⇣
~A · ~C⌘
~B�⇣
~A · ~B⌘
~C, se
tiene
~l =NX
i=1
mi
�
~!r2i � ~ri (~! · ~ri)�
, (5.2.1)
donde r2i = ~ri · ~ri. Si se consideran las componentes ~ri = (xi, yi, zi) y ~! =(!x,!y,!z), se puede escribir
~l =NX
i=1
mi
⇥
~!r2i � ~ri (xi!x + yi!y + zi!z)⇤
. (5.2.2)
La componente x de esta ecuacion resulta ser
lx =NX
i=1
mi
⇥
!xr2
i � xi (xi!x + yi!y + zi!z)⇤
(5.2.3)
lx =NX
i=1
mi
⇥�
r2i � x2
i
�
!x � xiyi!y � xizi!z
⇤
. (5.2.4)
Con un analisis similar a este, se obtienen las componentes y y z del momentoangular, con lo que se obtiene el conjunto de ecuaciones
lx =NX
i=1
mi
⇥�
r2i � x2
i
�
!x � xiyi!y � xizi!z
⇤
(5.2.5)
ly =NX
i=1
mi
⇥�xiyi!x +�
r2i � y2i�
!y � yizi!z
⇤
(5.2.6)
lz =NX
i=1
mi
⇥�xizi!x � yizi!y +�
r2i � z2i�
!z
⇤
. (5.2.7)
Este conjunto de ecuaciones se puede escribir en forma matricial como
0
@
lxlylz
1
A =
0
@
Ixx Ixy IxzIyx Iyy IyzIzx Izy Izz
1
A
0
@
!x
!y
!z
1
A (5.2.8)
donde los elementos de la matriz resultan ser los momentos de inercia con res-pecto al origen O

CAPITULO 5. DINAMICA DEL CUERPO RIGIDO 148
Ixx =NX
i=1
mi
�
r2i � x2
i
�
(5.2.9)
Iyy =NX
i=1
mi
�
r2i � y2i�
(5.2.10)
Izz =NX
i=1
mi
�
r2i � z2i�
(5.2.11)
y los productos de inercia con respecto a O,
Ixy = Iyx = �NX
i=1
mixiyi (5.2.12)
Ixz = Izx = �NX
i=1
mixizi (5.2.13)
Iyz = Izy = �NX
i=1
miyizi. (5.2.14)
La matriz que aparece en la ecuacion (5.2.8) se conoce como Matriz deInercia, I, y de sus componentes se puede comprobar que es real y simetrica.De esta forma se tiene
~l = I~! (5.2.15)
y las componentes de I se pueden escribir en forma general como
Ixj
xk
=NX
i=1
mi
⇥
r2i �jk � (xj)i (xk)i⇤
(5.2.16)
donde j, k = 1, 2, 3 . Si el cuerpo rıgido se considera como un objeto continuo yno discreto, esta definicion de la matriz de inercia se cambia por
Ixj
xk
=
ˆV
⇢ (~r)⇥
r2�jk � xjxk
⇤
dV, (5.2.17)
donde V representa el volumen del cuerpo y
⇢ (~r) = lım�V!0
�m
�V(5.2.18)
es la densidad de masa en el cuerpo.

CAPITULO 5. DINAMICA DEL CUERPO RIGIDO 149
5.3. Energıa Cinetica de Rotacion
Para un cuerpo rıgido compuesto por N�partıculas se define la energıacinetica como
T =1
2
NX
i=1
miv2
i =1
2
NX
i=1
mi~vi · ~vi (5.3.1)
con ~vi la velocidad medida con respecto al sistema del espacio. Debido aloperador para la razon de cambio de un vector se tiene
✓
d~ridt
◆
e
= ~vi =
✓
d~ridt
◆
c
+ ~! ⇥ ~ri, (5.3.2)
y ya que la ubicacion de cada partıcula no cambia con respecto al sistemadel cuerpo,
~vi = ~! ⇥ ~ri. (5.3.3)
De esta forma,
T =1
2
NX
i=1
mi~vi · (~! ⇥ ~ri) , (5.3.4)
y al utilizar la identidad vectorial ~A ·⇣
~B ⇥ ~C⌘
= ~B ·⇣
~C ⇥ ~A⌘
T =1
2
NX
i=1
mi~! · (~ri ⇥ vi) (5.3.5)
T =1
2~! ·
NX
i=1
mi (~ri ⇥ vi) (5.3.6)
T =1
2~! ·~l. (5.3.7)
5.4. Diadas
Una diada es un tensor de segundo orden, escrito en una forma especial,junto con una notacion y operaciones especiales analogos a los existentes enalgebra matricial. Si se tienen los vectores tridimensionales
~A = Axi+Ay j +Az k (5.4.1)
~B = Bxi+By j +Bz k, (5.4.2)
se puede formar a partir de ellos la diada !AB con componentes

CAPITULO 5. DINAMICA DEL CUERPO RIGIDO 150
~A ~B = !AB = AxBx ii+AxBy ij +AxBz ik (5.4.3)
+AyBxj i+AyBy jj +AyBz jk (5.4.4)
+AzBxki+AzBykj +AzBz kk. (5.4.5)
De forma estricta se suele denominar diadica al polinomio de diadas y por ello !AB serıa una diadica, donde cada uno de los terminos corresponde a una diada.Sin embargo, en estas notas utilizaremos indistintamente los dos terminos. Enrepresentacion matricial se puede escribir
!AB =
0
@
AxBx AxBy AxBz
AyBx AyBy AyBz
AzBx AzBy AzBz
1
A . (5.4.6)
Se define la diada unidad como
!1 = ii+ jj + kk =
0
@
1 0 00 1 00 0 1
1
A . (5.4.7)
5.4.1. Operaciones Basicas
Una diada puede combinarse con un vector mediante el producto punto,definido por
⇣ !AB
⌘
· ~C =⇣
~A ~B⌘
· ~C = ~A⇣
~B · ~C⌘
. (5.4.8)
Tambien es posible realizar el producto punto en la forma
~C ·⇣ !AB
⌘
= ~C ·⇣
~A ~B⌘
=⇣
~C · ~A⌘
~B. (5.4.9)
En los dos casos el resultado del producto punto entre una diada y un vectores un vector, pero debe notarse que en general
~C ·⇣ !AB
⌘
6=⇣ !AB
⌘
· ~C. (5.4.10)
El producot de la diada unidad por cualquier vector da como resultado elmismo vector,
~C · !1 = !1 · ~C = ~C. (5.4.11)
Tambien es posible realizar el doble producto punto entre dos diadas paraobtener como resultado un escalar definido por
⇣ !AB
⌘
:⇣ !CD
⌘
=⇣
~A ~B⌘
:⇣
~C ~D⌘
= ~C ·⇣ !AB
⌘
· ~D =⇣
~C · ~A⌘⇣
~B · ~D⌘
. (5.4.12)

CAPITULO 5. DINAMICA DEL CUERPO RIGIDO 151
5.5. La diada de Inercia
A partir de la ecuacion (5.2.1) el momento anguklar de un cuerpo rıgido sepuede escribir como
~l =NX
i=1
mi
�
~!r2i � ~ri (~! · ~ri)�
. (5.5.1)
Utilizando la nocion de diada unidad, el primer termino de la derecha se puedeescribir
~!r2i = r2i !1 · ~!. (5.5.2)
Por otro lado, el segundo termino de la derecha resulta ser
~ri (~! · ~ri) = ~ri (~ri · ~!) = (~ri~ri) · ~!, (5.5.3)
donde (~ri~ri) es una diada. Ası, el momento angular es
~l =NX
i=1
mi
h
r2i !1 · ~! � (~ri~ri) · ~!
i
(5.5.4)
~l =NX
i=1
mi
h
r2i !1 � (~ri~ri)
i
· ~! (5.5.5)
~l = !I · ~!, (5.5.6)
donde se ha definido la diada de inercia,
!I =
NX
i=1
mi
h
r2i !1 � (~ri~ri)
i
. (5.5.7)
EjemploPara comprobar que la representacion matricial de la diada de inercia
coincide con la representacion matricial del tensor de inercia solo bastacalcular sus componentes explıcitamente. Notese que
!I =
NX
i=1
mi
h
r2i !1 � (~ri~ri)
i
=NX
i=1
mi
h
r2i
⇣
ii+ jj + kk⌘
�⇣
xii+ yij + zik⌘⇣
xii+ yij + zik⌘i
Por ejemplo, la componente ii de la diada !I es
NX
i=1
mi
⇥
r2i � x2
i
⇤
ii

CAPITULO 5. DINAMICA DEL CUERPO RIGIDO 152
que coincide exactamente con la componente Ixx del tensor de inercia.
Con esta forma de escribir el momento angular, la energıa cinetica del cuerporıgido (5.3.7) sera
T =1
2~! ·~l = 1
2~! · !I · ~! =
1
2
!I : (~!~!) . (5.5.8)
5.6. Momentos de Inercia
En la representacion matricial, la diada (o tensor) de inercia I se puedediagonalizar mediante una transformacion de semejanza,
I0 = R�1IR, (5.6.1)
donde R es la matriz de valores propios. Si se denotan por e1
, e2
, e3
los vectoresde la base en la que el tensor de inercia es diagonal, el momento angular sepuede escribir
0
@
l1
l2
l3
1
A =
0
@
I1
0 00 I
2
00 0 I
3
1
A
0
@
!1
!2
!3
1
A , (5.6.2)
o tambien
~l = I1
!1
e1
+ I2
!2
e2
+ I3
!3
e3
. (5.6.3)
Los vectores e1
, e2
, e3
definen los ejes principales del cuerpo rıgido y los valoresI1
, I2
, I3
se denominan momentos de inercia principales.En esta misma base, la energıa cinetica sera
T =1
2I1
!2
1
+1
2I2
!2
2
+1
2I3
!2
3
. (5.6.4)
Ahora bien, si la direccion del eje instantaneo de rotacion del cuerpo rıgidoesta definido por el vector unitario n, la velocidad angular sera ~! = !n y laenergıa cinetica se convierte en
T =1
2~! · !I · ~! =
1
2!2n · !I · n =
1
2!2I (5.6.5)
donde se ha definido el momento de inercia con respecto al eje instantaneode rotacion
I = n · !I · n =NX
i=1
mi
h
r2i � (~ri · n)2i
. (5.6.6)
Para comprobar que esta definicion coincide con el momento de inercia tra-bajado en la mecanica newtoniana, notese de la Figura 5.6.1 que para cada una

CAPITULO 5. DINAMICA DEL CUERPO RIGIDO 153
Figura 5.6.1: Momento de Inercia
de las partıculas, el factorh
r2i � (~ri · n)2i
corresponde a la distancia existente
entre la partıcula y el eje de rotacion al cuadrado. De la misma forma, de laFigura 5.6.1 se observa que esta distancia se puede escribir como la norma deun producto vectorial en la forma
h
r2i � (~ri · n)2i
= (~ri ⇥ n)2 . (5.6.7)
De esta forma, el momento de inercia se puede escribir en la forma usual
I = n · !I · n =NX
i=1
mi (~ri ⇥ n)2 . (5.6.8)
5.6.1. Teorema de los Ejes Paralelos
Para mostrar que el teorema de ejes paralelos surge naturalmente de ladefinicion de la diada de inercia, considere el cuerpo rigido mostrado en la Figura5.6.2, donde se han dibujado dos ejes paralelos. El eje A pasa por el punto O,mientras que el eje B pasa por el centro de masa y es paralelo al eje A. Seconsiderara una partıcula de masa mi ubicada con el vector ~ri utilizando comoorigen el punto O y con el vector ~r0i con respecto al centro de masa. Ademas el
vector ~R define la posicion del centro de masa con respecto a O. Ası, se observaque
~ri = ~r0i + ~R. (5.6.9)
A partir de la ecuacion (5.6.8) se tiene que el momento de inercia con respectoal eje A es

CAPITULO 5. DINAMICA DEL CUERPO RIGIDO 154
Figura 5.6.2: Teorema de los Ejes Paralelos
IA =NX
i=1
mi (~ri ⇥ n)2 , (5.6.10)
o utilizando (5.6.9),
IA =NX
i=1
mi
h⇣
~r0i + ~R⌘
⇥ ni
2
(5.6.11)
IA =NX
i=1
mi
h
~r0i ⇥ n+ ~R⇥ ni
2
(5.6.12)
IA =NX
i=1
mi
(~r0i ⇥ n)2
+⇣
~R⇥ n⌘
2
+ 2 (~r0i ⇥ n) ·⇣
~R⇥ n⌘
�
(5.6.13)
IA =NX
i=1
mi (~r0i ⇥ n)
2
+NX
i=1
mi
⇣
~R⇥ n⌘
2
+2NX
i=1
mi (~r0i ⇥ n) ·
⇣
~R⇥ n⌘
(5.6.14)
IA =NX
i=1
mi (~r0i ⇥ n)
2
+M⇣
~R⇥ n⌘
2
+ 2
NX
i=1
mi~r0i ⇥ n
!
·⇣
~R⇥ n⌘
, (5.6.15)
donde se M =PN
i=1
mi es la masa total del cuerpo rıgido. Notese que debido ala definicion del centro de masa el tercer termino del lado derecho desaparece,
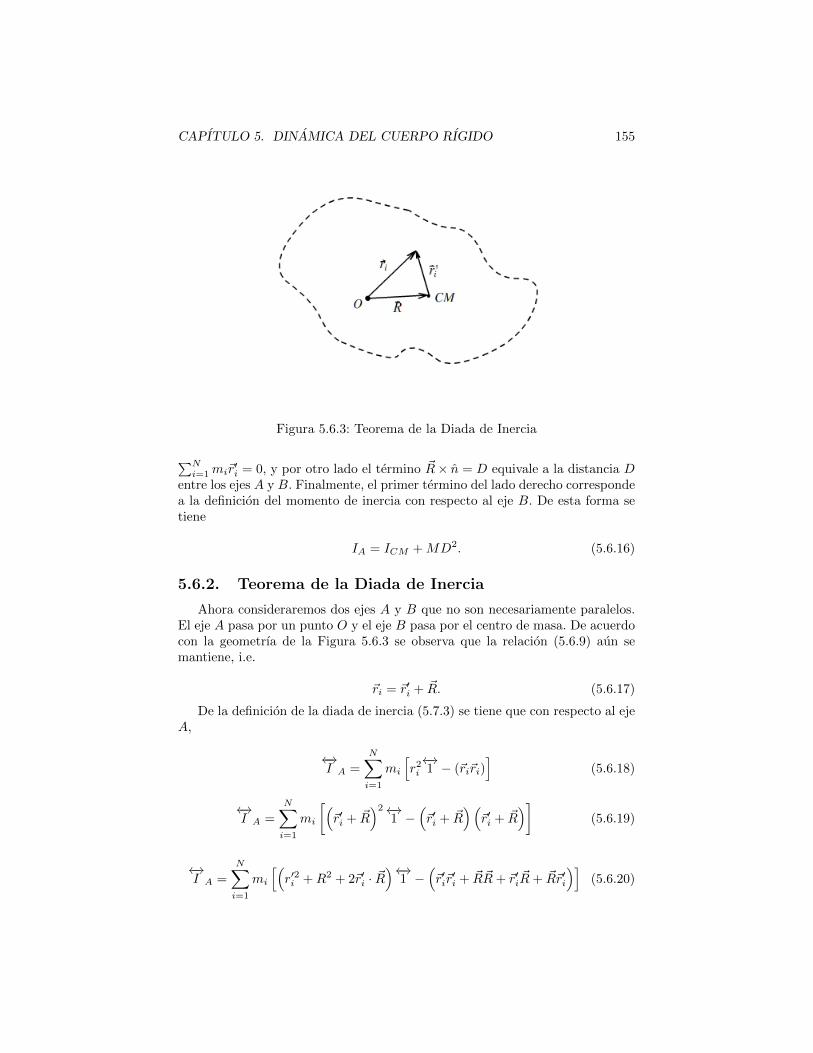
CAPITULO 5. DINAMICA DEL CUERPO RIGIDO 155
Figura 5.6.3: Teorema de la Diada de Inercia
PNi=1
mi~r0i = 0, y por otro lado el termino ~R⇥ n = D equivale a la distancia Dentre los ejes A y B. Finalmente, el primer termino del lado derecho correspondea la definicion del momento de inercia con respecto al eje B. De esta forma setiene
IA = ICM +MD2. (5.6.16)
5.6.2. Teorema de la Diada de Inercia
Ahora consideraremos dos ejes A y B que no son necesariamente paralelos.El eje A pasa por un punto O y el eje B pasa por el centro de masa. De acuerdocon la geometrıa de la Figura 5.6.3 se observa que la relacion (5.6.9) aun semantiene, i.e.
~ri = ~r0i + ~R. (5.6.17)
De la definicion de la diada de inercia (5.7.3) se tiene que con respecto al ejeA,
!I A =
NX
i=1
mi
h
r2i !1 � (~ri~ri)
i
(5.6.18)
!I A =
NX
i=1
mi
⇣
~r0i + ~R⌘
2 !1 �
⇣
~r0i + ~R⌘⇣
~r0i + ~R⌘
�
(5.6.19)
!I A =
NX
i=1
mi
h⇣
r02i +R2 + 2~r0i · ~R⌘ !
1 �⇣
~r0i~r0i + ~R~R+ ~r0i ~R+ ~R~r0i
⌘i
(5.6.20)

CAPITULO 5. DINAMICA DEL CUERPO RIGIDO 156
!I A =
NX
i=1
mi
h
r02i !1 � ~r0i~r0i
i
+NX
i=1
mi
h
R2
!1 � ~R~R
i
+NX
i=1
mi
h
2~r0i · ~R !1 � ~r0i ~R� ~R~r0i
i
. (5.6.21)
Notese que debido a la definicion del centro de masa,PN
i=1
mi~r0i = 0, y por elloel ultimo termino del lado derecho desaparece.
!I A =
NX
i=1
mi
h
r02i !1 � ~r0i~r0i
i
+NX
i=1
mi
h
R2
!1 � ~R~R
i
.
En esta ecuacion, el primer termino del lado derecho corresponde a la diada deinercia con respecto al eje B que pasa por el centro de masa y por ello se tienefinalmente
!I A =
!I CM +M
h
R2
!1 � ~R~R
i
.
5.7. Transformacion del Tensor de Inercia a losEjes Principales
En la representacion matricial del tensor de inercia, llevar este a un sistemade ejes principales se reduce a solucionar la ecuacion caracterıstica para la matrizI, que esta dada por
I~r = �~r, (5.7.1)
donde � y ~r son los valores y vectores propios de la matriz I respectivamente.Multiplicando a la izquierda por el complejo conjugado ~r⇤,
~r⇤I~r = �~r⇤~r. (5.7.2)
Para escribir esta relacion en forma matricial se designaran con Iik las com-ponentes del tensor de inercia y con Xkj la k�esima componente del j�esimovector propio. Ası el lado izquierdo de esta ecuacion sera ~r⇤I~r =
P
ik X⇤ilIikXkj .
Ademas, si se designa con Ij el j�esimo valor propio, el conjunto de las tresecuaciones de valores propios se puede escribir en la forma
X
ik
X⇤ilIikXkj = Ij~r
⇤l · ~rj . (5.7.3)
Tomando el conjugado complejo de esta relacion se tiene

CAPITULO 5. DINAMICA DEL CUERPO RIGIDO 157
X
ik
XilI⇤ikX
⇤kj = I⇤j ~rl · ~r⇤j (5.7.4)
o reorganizando terminos en el lado izquierdo,
X
ik
X⇤kjI
⇤ikXil = I⇤j ~rl · ~r⇤j . (5.7.5)
Ya que el tensor de inercia es hermiteano, Iik = I⇤ki (ya que este tensores simetrico y sus componentes tienen valores reales), esta ecuacion se puedeescribir
X
ik
X⇤kjIkiXil = I⇤j ~rl · ~r⇤j . (5.7.6)
Realizando el intercambio de indices mudos (i$ k) en esta expresion seobtiene
X
ik
X⇤ijIikXkl = I⇤j ~rl · ~r⇤j (5.7.7)
y realizando el intercambio (j $ l) se tiene finalmente
X
ik
X⇤ilIikXkj = I⇤l ~rj · ~r⇤l . (5.7.8)
Notese que el lado izquierdo de esta ecuacion es exactamente igual al ladoizquierdo de la ecuacion (5.7.3). De esta forma restando estas dos ecuacionesresulta
X
ik
X⇤ilIikXkj �
X
ik
X⇤ilIikXkj = 0 = Ij~r
⇤l · ~rj .� I⇤l ~rj · ~r⇤l (5.7.9)
(Ij � I⇤l )~rj · ~r⇤l = 0. (5.7.10)
Para analizar este resultado notese inicialmente que si l = j se tiene ~rj ·~r⇤l =
~rj · ~r⇤j = |rj |2 > 0 y por ello la ecuacion (5.7.10) nos asegura que
Ij = I⇤j , (5.7.11)
es decir que los valores propios del tensor de inercia son reales.Ahora bien, ya que los valores propios son reales y el tensor de inercia tiene
componentes reales, los cosenos directores de los vectores propios tambien debenser reales (para comprobarlo notese la ecuacion de valores propios y tomesesu complejo conjugado). Con este resultado, y considerando el caso l 6= j, laecuacion (5.7.10) indica que
(Ij � Il)~rj · ~rl = 0. (5.7.12)
Si todos los valores propios son diferentes, Ij 6= Il, se puede concluir que~rj · ~rl = 0, es decir que todos los vectores propios son ortogonales entre sı.

CAPITULO 5. DINAMICA DEL CUERPO RIGIDO 158
Por otro lado, si dos de los valores propios son iguales, Ij = Il, los corres-pondientes vectores propios NO son necesariamente ortogonales. Sin embargo,ya que cualquier combinacion lineal de estos dos vectores propios tambien es unvector propio. Es decir que todos los vectores de este plano son vectores propiosy el tercer vector propio es perpendicular a este plano. De esta forma, paradiagonalizar el tensor de inercia siempre se pueden tomar tres vectores propiosortogonales entre sı.
Finalmente, si los tres valores propios son iguales, se concluye que todas lasdirecciones del espacio son vectores propios y por ello el tensor de inercia ya esdiagonal.
Para cualquier punto en un cuerpo rıgido es posible encontrar un conjunto deejes cartesianos en donde el tensor de inercia es diagonal. Los ejes en los cau-les sucede esto se conocen como Ejes Principales y los correspondientes valorespropios se denominan Momentos de Inercia Principales. En la practica, paraencontrar los valores propios se soluciona la ecuacion secular
�
�
�
�
�
�
Ixx � I Ixy IxzIyx Iyy � I IyzIzx Izy Izz � I
�
�
�
�
�
�
= 0. (5.7.13)
5.8. Ecuaciones de Euler para el Cuerpo Rıgido
El lagrangiano para un cuerpo rıgido sometido unicamente a fuerzas conser-vativas se puede escribir como
L = T � V =1
2
�
I1
!2
1
+ I2
!2
2
+ I3
!2
3
�� V (✓,�, ) , (5.8.1)
donde los momentos de inercia estan referidos a los ejes principales del cuerpoy el potencial esta escrito en terminos de los angulos de Euler ✓, � y . Las ve-locidades angulares !
1
, !2
y !3
pueden expresarse en terminos de estos angulosmediante la transformacion dada en (4.8.9),
8
>
<
>
:
!x0 = !1
= � sin ✓ sin + ✓ cos
!y0 = !2
= � sin ✓ cos � ✓ sin !z0 = !
3
= � cos ✓ + ,
(5.8.2)
con lo que el lagrangiano se convierte en funcion exclusiva de estas variables y
sus derivadas, L = L⇣
✓,�, , ✓, �, ⌘
. Ahora bien, como se estudio en capitulos
anteriores, cuando las coordenadas generalizadas son angulos, las correspon-dientes fuerzas generalizadas se pueden interpretar como torques. En este casolas fuerzas correspondientes a las coordenadas generalizadas ✓, � y son lascomponentes del torque total, pero estas no se orientan en direccion de los ejesprincipales sino que van a lo largo de la lınea de los nodos (✓), el eje z del sistemadel espacio (�) y a lo largo del eje principal 3 o z0 del sistema del cuerpo ( ).

CAPITULO 5. DINAMICA DEL CUERPO RIGIDO 159
Resumiendo, la unica fuerza generalizada que va sobre un eje principal es lacorrespondiente a la coordenada . Por esta razon comenzaremos el analisis delas ecuaciones de Euler-Lagrange por esta componente. Ası, esta ecuacion es
d
dt
✓
@T
@
◆
� @T
@ = N
3
(5.8.3)
con N3
el torque a lo largo del tercer eje principal. A partir del lagrangianomostrado se tiene
@T
@ =
@
@
✓
1
2I3
!2
3
◆
= I3
!3
@!3
@ = I
3
!3
(5.8.4)
d
dt
✓
@T
@
◆
=d
dt(I
3
!3
) = I3
!3
(5.8.5)
y ademas
@T
@ = I
1
!1
@!1
@ + I
2
!2
@!2
@ @T
@ = I
1
!1
⇣
� sin ✓ cos � ✓ sin ⌘
+ I2
!2
⇣
�� sin ✓ sin � ✓ cos ⌘
@T
@ = I
1
!1
!2
� I2
!2
!1
@T
@ = (I
1
� I2
)!1
!2
. (5.8.6)
De esta forma, la ecuacion de Euler-Lagrange de primera especie para lacoordenada resulta ser
I3
!3
� (I1
� I2
)!1
!2
= N3
. (5.8.7)
Mediante la permutacion cıclica de los ındices 1, 2, 3 se obtienen las ecuacio-nes de Euler para los tres ejes principales,
8
>
<
>
:
I1
!1
� (I2
� I3
)!2
!3
= N1
I2
!2
� (I3
� I1
)!3
!1
= N2
I3
!3
� (I1
� I2
)!1
!2
= N3
.
(5.8.8)
EjemploPara una derivacion alternativa de las ecuaciones de Euler-Lagrange
para el cuerpo rıgido se puede considerar la ecuacion
d~l
dt
!
e
= ~N

CAPITULO 5. DINAMICA DEL CUERPO RIGIDO 160
que es valida el sistema de coordenadas del espacio (sistema inercial). Trans-formando el lado izquierdo al sistema de coordenadas del cuerpo (ejes prin-cipales) se tiene
d~l
dt
!
e
=
d~l
dt
!
c
+ ~! ⇥~l = ~N.
Considerando unicamente la componente 1 de esta ecuacion se obtiene
dl1
dt+⇣
~! ⇥~l⌘
1
= N1
dl1
dt+ (!
2
l3
� !3
l2
) = N1
.
Ahora bien, para los ejes principales se tiene
l1
= I1
!1
l2
= I2
!2
l3
= I3
!3
,
y por ello
d (I1
!1
)
dt+ !
2
I3
!3
� !3
I2
!2
= N1
I1
!1
+ !2
!3
(I3
� I2
) = N1
.
De forma similar se obtienen las ecuaciones para los ejes principales 2 y3.
5.9. Cuerpo Rıgido Libre Simetrico
Un cuerpo rıgido libre es aquel sobre el cual no actuan fuerzas externas, i.e.~N = 0. Las ecuaciones de Euler-Lagrange en este caso toman la forma
8
>
<
>
:
I1
!1
= (I2
� I3
)!2
!3
I2
!2
= (I3
� I1
)!3
!1
I3
!3
= (I1
� I2
)!1
!2
.
(5.9.1)
Ahora bien, si se considera un cuerpo rıgido simetrico de tal manera queI1
= I2
estas ecuaciones se reducen a

CAPITULO 5. DINAMICA DEL CUERPO RIGIDO 161
8
>
<
>
:
I1
!1
= (I1
� I3
)!2
!3
I1
!2
= (I3
� I1
)!3
!1
I3
!3
= 0.
(5.9.2)
La tercera de estas ecuaciones permite concluir de inmediato que !3
= cte.Por lo tanto el sistema se reduce al par de ecuaciones
(
I1
!1
= (I1
� I3
)!2
!3
I1
!2
= (I3
� I1
)!3
!1
.(5.9.3)
Para solucionar este sistema se diferenciara la primera ecuacion para obtener
I1
!1
= (I1
� I3
) !2
!3
(5.9.4)
!2
=I1
(I1
� I3
)!3
!1
(5.9.5)
y al reemplazar en la segunda ecuacion del sistema
I1
!2
=I21
(I1
� I3
)!3
!1
= (I3
� I1
)!3
!1
(5.9.6)
!1
+(I
3
� I1
)2 !2
3
I21
!1
= 0. (5.9.7)
Como es conocido, la solucion tıpica para esta ecuacion diferencial de osci-lador armonico simple es
!1
= A cos⌦t (5.9.8)
donde A es una constante y ⌦ = (I3�I1)!3
I1. Reemplazando en cualquiera de las
ecuaciones del sistema se obtiene la solucion para !2
,
!2
= A sin⌦t. (5.9.9)
Notese que las soluciones para !1
y !2
permiten concluir que el vector
~!12
= !1
e1
+ !2
e2
(5.9.10)
tiene magnitud constante
|~!12
| = A
y rota con velocidad angular constante ⌦ alrededor del eje e3
del cuerpo.El vector completo ~! tambien posee una magnitud constante ! =
p
A2 + !2
3
yposee un movimiento de precesion alrededor del eje e
3
con velocidad angular
~⌦ =(I
3
� I1
)!3
I1
e3
. (5.9.11)

CAPITULO 5. DINAMICA DEL CUERPO RIGIDO 162
Figura 5.9.1: Vector !
Si se nombra ↵ el angulo entre el vector ~! y ~⌦, i.e. con el eje e3
, este puedeobtenerse mediante la relacion
tan↵ =A
!3
. (5.9.12)
De esta forma, a la constante A se le denomina amplitud de precesion. Noteseque la magnitud de la velocidad angular de precesion al igual que su direcciondependen de la diferencia entre los momentos de inercia I e I
3
.
EjemploSi se considera a la Tierra como un cuerpo rıgido simetrico libre (esfe-
roide achatado sin torques externos) es de esperar que su eje de rotaciontenga un movimiento de precesion. Numericamente se tiene que para nues-tro planeta
I3
� I1
I1
' 0,00327
y por ello la velocidad angular de precesion es
⌦ ' !3
306.
Ya que para el caso terrestre la componente !3
es practicamente iguala la magnitud de la velocidad angular de rotacion de la Tierra (! =1 rev/dia), se puede concluir que el periodo del movimiento de preseciondebe ser de 306 dıas, i.e. cerca de 10 meses.

CAPITULO 5. DINAMICA DEL CUERPO RIGIDO 163
Cuidadosas observaciones del movimiento de nuestro planeta han mos-trado que este movimiento de precesion enr ealidad existe y que su ampli-tud es del orden de algunas decenas desegundo de latitud (esto correspondeaproximadamente a A ' 10 m.). Sin embargo, superpuesto con esta prece-sion se encuentran otros efectos que desvıan el movimiento del eje haciendoque la Tierra “cabecee” . En el siguiente capıtulo se discutira mas al respec-to.
A partir de la forma del tensor de inercia se puede encontrar una relacioninteresante entre los vectores ~!, ~l y ~⌦. En el sistema de ejes principales se tienenlas componentes
!I = I
1
e1
e1
+ I1
e2
e2
+ I3
e3
e3
(5.9.13)
o arreglando algunos terminos,
!I = I
1
(e1
e1
+ e2
e2
+ e3
e3
) + (I3
� I1
) e3
e3
(5.9.14)
!I = I
1
!1 + (I
3
� I1
) e3
e3
(5.9.15)
Reemplazando esta expresion en el momento angular,
~l = !I · ~!, (5.9.16)
se tiene
~l =h
I1
!1 + (I
3
� I1
) e3
e3
i
· ~! (5.9.17)
~l = I1
~! + (I3
� I1
) e3
e3
· ~! (5.9.18)
~l = I1
~! + (I3
� I1
)!3
e3
. (5.9.19)
Utilizando la ecuacion (5.9.11),
~l = I1
~! + I1
~⌦ (5.9.20)
~l = I1
⇣
~! + ~⌦⌘
, (5.9.21)
es decir que los vectores ~!, ~l y ~⌦ pertenecen al mismo plano.Si se denomina � el angulo entre el vector ~! y el momento angular ~l, este se
puede calcular mediante el producto interno
~! ·~l = !l cos�, (5.9.22)
ya que es decir

CAPITULO 5. DINAMICA DEL CUERPO RIGIDO 164
Figura 5.9.2: Vectores ~!, ~⌦ y ~l
cos� =~! ·~l!l
=~! · !I · ~!
!l=
2T
!l= cte. (5.9.23)
Es decir que el vector ~! traza un cono en el espacio alrededor de ~l y con unangulo �.
Con esta informacion, es posible graficar estos tres vectores. El caso en elque ⌦ = (I3�I1)!3
I1> 0 y !
3
> 0 se observa en la Figura 5.9.2. Notese que eneste caso se debe tener ↵ > � para que las relaciones tengan sentido.
Por otro lado, si ⌦ = (I3�I1)!3
I1< 0 la disposicion de los vectores es la
ilustrada en la Figura 5.9.3.
5.10. Construccion de Poinsot
5.10.1. Elipsoide de Inercia
El momento de inercia con respecto al eje instantaneo de rotacion n estadefinido por
I = n · !I · n (5.10.1)
y si este eje se escribe en terminos de sus cosenos directores ↵, � y � como
n = ↵i+ �j + �k, (5.10.2)
el momento de inercia sera
I = Ixx↵2 + Iyy�
2 + Izz�2 + 2Ixy↵� + 2Iyz�� + 2Ixz↵� (5.10.3)

CAPITULO 5. DINAMICA DEL CUERPO RIGIDO 165
Figura 5.9.3: Vectores ~!, ~⌦ y ~l
o tambien
1 = Ixx↵2
I+ Iyy
�2
I+ Izz
�2
I+ 2Ixy
↵�
I+ 2Iyz
��
I+ 2Ixz
↵�
I. (5.10.4)
Definiendo el vector
~⇢ = (⇢x, ⇢y, ⇢z) =
✓
↵pI,�pI,�pI
◆
=npI
(5.10.5)
esta ecuacion se reescribe como
1 = Ixx⇢2
x + Iyy⇢2
y + Izz⇢2
z + 2Ixy⇢x⇢y + 2Iyz⇢y⇢z + 2Ixz⇢x⇢z. (5.10.6)
Considerando las cantidades ⇢x, ⇢y y ⇢z como variables, esta ecuacion re-presenta una superficie en el espacio. Especıficamente, esta corresponde a unelipsoide denominado elipsoide de inercia. Desde este punto de vista geometri-co es conocido que siempre es posible encontrar un sistema de coordenadas(⇢
1
, ⇢2
, ⇢3
), que lleven la ecuacion a su forma canonica,
1 = I1
⇢21
+ I2
⇢2
2 + I3
⇢3
2. (5.10.7)
En este caso los ejes principales del elipsoide de inercia estan ubicados a lo largode los ejes de coordenadas. De igual forma, los momentos de inercia principalesIxx, Iyy e Izz determinan la longitud de estos ejes principales. Ademas, si dosde las raices de la ecuacion secular (5.7.13) son iguales, el elipsoide posee dosejes principales iguales (i.e. se tiene un elipsoide de revolucion). Si las tres raicesde la ecuacion secular son iguales, el elipsoide se degenera en una esfera.

CAPITULO 5. DINAMICA DEL CUERPO RIGIDO 166
5.10.2. Movimiento del Elipsoide
Definiremos ahora la funcion
F (~⇢) = ~⇢ · !I · ~⇢. (5.10.8)
Las superficies de nivel de F , i.e. aquellas para las cuales F (~⇢) = cte, sonelipsoides. En particular, la superficie F (~⇢) = 1 es la que se identifica con elelipsoide de inercia.
Ya que en general el vector n varıa en el tiempo, el vector ~⇢ tambien cambiay lo hace de tal forma que su extremo siempre define un punto sobre el elipsoide.La normal al elipsoide de inercia en el punto extremo de ~⇢ viene dada por
rF (~⇢) =
✓
@F
⇢x,@F
⇢y,@F
⇢z
◆
. (5.10.9)
Si se trabaja en el sistema de ejes principales (⇢1
, ⇢2
, ⇢3
) la funcion F seescribe
F (~⇢) = I1
⇢21
+ I2
⇢2
2 + I3
⇢3
2, (5.10.10)
y por lo tanto
rF (~⇢) = 2 (I1
⇢1
, I2
⇢2
, I3
⇢3
) . (5.10.11)
Ahora bien, debido a la definicion del vector ~⇢ se tiene
~⇢ = (⇢1
, ⇢2
, ⇢3
) =npI=
~!
!pI=
1
!pI(!
1
,!2
,!3
) (5.10.12)
y con ello el vector normal al elipsoide es
rF (~⇢) =2
!pI(I
1
!1
, I2
!2
, I3
!3
) . (5.10.13)
En el sistema de ejes principales se cumple
8
>
<
>
:
l1
= I1
!1
l2
= I2
!2
l3
= I3
!3
,
(5.10.14)
y por ello
rF (~⇢) =2
!pI(l1
, l2
, l3
) (5.10.15)
rF (~⇢) =2~l
!pI. (5.10.16)
Luego, el vector ~⇢ y por consiguiente ~! se mueven de tal manera que la normalal elipsoide de inercia esta siempre en la direccion del momentum angular ~l.

CAPITULO 5. DINAMICA DEL CUERPO RIGIDO 167
Figura 5.10.1: Elipsoide de Inercia
En el caso partıcular en el que la fuerza externa total sobre el cuerpo rıgidoes cero, el vector ~l esta fijo en el espacio, por lo que el elipsoide de inercia debemoverse para preservar la conexion entre ~! y ~l. La distancia entre el elipsoide yel plano tangente al elipsoide y perpendicular al vector momento angular vienedada por la proyeccion de ~⇢ en ~l,
D =~⇢ ·~ll
=~! ·~l!lpI
(5.10.17)
D =I~! · ~!!lpI
=I!2
lpI!2
(5.10.18)
D =2T
lpI!2
=2T
lp2T
(5.10.19)
D =~⇢ ·~ll
=
p2T
l. (5.10.20)
Ya que la energıa cinetica T y el momento angular l son constantes, ladistancia del origen del elipsoideal plano tangente es constante. Ademas, ya quela normal al plano esta siempre en la direccion de ~l(que tambien es fija), el planopermanece fijo y por ello se denomina plano invariante (ver Figura 5.10.1).
El movimiento sin fuerzas externas se puede ver entonces como si el elipsoidede inercia rodara sin deslizar sobre el plano invariante y con su origen a unaaltura constante sobre el plano. El rodamiento ocurre sin deslizar porque elpunto de contacto instantaneo definido por ~⇢ esta sobre el eje instantaneo derotacion, el cual sta momentaneamente en reposo.
La curva trazada por el punto de contacto del elipsoide sobre el plano se llamaherpolodia y la correspondiente curva sobre el elipsoide se denomina polodia.
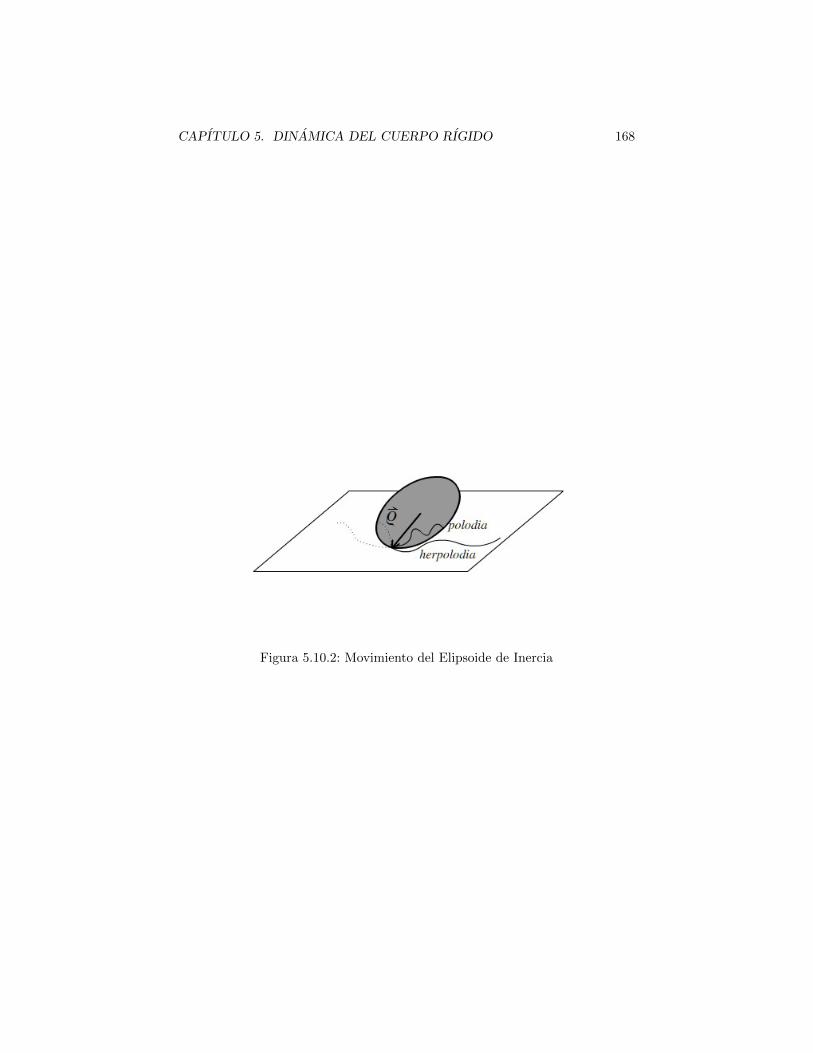
CAPITULO 5. DINAMICA DEL CUERPO RIGIDO 168
Figura 5.10.2: Movimiento del Elipsoide de Inercia

Capıtulo 6
Aplicaciones
6.1. Trompo Simetrico Pesado con un Punto Fi-jo
La energıa cinetica asociada con el trompo simetrico que se observa en laFigura 6.1.1 es
T =1
2I1
�
!2
x0 + !2
y0�
+1
2I3
!2
z0 . (6.1.1)
Reemplazando las componentes de la velocidad angular mediante la ecuacion(5.8.2) se tiene
T =1
2I1
⇣
� sin ✓ sin + ✓ cos ⌘
2
+⇣
� sin ✓ cos � ✓ sin ⌘
2
�
+1
2I3
⇣
� cos ✓ + ⌘
2
(6.1.2)
T =1
2I1
⇣
�2 sin2 ✓ + ✓2⌘
+1
2I3
⇣
� cos ✓ + ⌘
2
. (6.1.3)
La energıa potencial es
V = Mgh cos ✓ (6.1.4)
por lo que el lagrangiano viene dado por
L = T � V =1
2I1
⇣
�2 sin2 ✓ + ✓2⌘
+1
2I3
⇣
� cos ✓ + ⌘
2
�Mgh cos ✓. (6.1.5)
Se observa claramente que � y son coordenadas cıclicas y por ello los mo-mentum generalizados correspondientes se conservan. Esto se puede comprobartambien al notar que el torque hecho por el peso (unica fuerza externa) esta
169

CAPITULO 6. APLICACIONES 170
Figura 6.1.1: Trompo Simetrico con un punto fijo
dirigido a lo largo de la lınea de los nodos y por ello no existe ninguna compo-nente sobre el eje z ni sobre la vertical (estos son tres ejes perpendiculares). Poresta razon el momentum relacionado con estas componentes debe conservarse.
De esta forma se tienen las primeras integrales de movimiento
P =@L
@ = I
3
⇣
+ � cos ✓⌘
= I3
!3
(6.1.6)
P� =@L
@�=�
I1
sin2 ✓ + I3
cos2 ✓�
�+ I3
cos ✓. (6.1.7)
Por otro lado, el lagrangiano no depende explıcitamente del tiempo y ya quela energıa cinetica posee unicamente terminos cuadraticos, concluimos que laenergıa generalizada que se conserva corresponde a la energıa mecanica total,
E = T + V =1
2I1
⇣
�2 sin2 ✓ + ✓2⌘
+1
2I3
⇣
� cos ✓ + ⌘
2
+Mgh cos ✓. (6.1.8)
Ya que se tienen tres coordenadas generalizadas (✓,�, ) y tres integralesprimeras, el problema es soluble analıticamente. De la ecuacion (6.1.6) se tiene
I3
= P � I3
� cos ✓ (6.1.9)
y reemplazando en (6.1.7),
P� =�
I1
sin2 ✓ + I3
cos2 ✓�
�+⇣
P � I3
� cos ✓⌘
cos ✓ (6.1.10)
P� = I1
� sin2 ✓ + I3
� cos2 ✓ + P cos ✓ � I3
� cos2 ✓ (6.1.11)

CAPITULO 6. APLICACIONES 171
P� = I1
� sin2 ✓ + P cos ✓ (6.1.12)
� =P� � P cos ✓
I1
sin2 ✓. (6.1.13)
De esta forma la ecuacion de energıa (6.1.8) se puede escribir como
E =1
2
(P� � P cos ✓)2
I1
sin2 ✓+
1
2I1
✓2 +1
2I3
!2
3
+Mgh cos ✓. (6.1.14)
Ya que el termino 1
2
I3
!2
3
es constante, podemos definir la constante E0 =E � 1
2
I3
!2
3
y con ello
E0 =1
2
(P� � P cos ✓)2
I1
sin2 ✓+
1
2I1
✓2 +Mgh cos ✓. (6.1.15)
Definiendo ahora la energıa potencial efectiva
Ueff (✓) =1
2
(P� � P cos ✓)2
I1
sin2 ✓+Mgh cos ✓ (6.1.16)
se obtiene nla ecuaciond iferencial para la coordenada ✓,
E0 =1
2I1
✓2 + Ueff (✓) (6.1.17)
que se puede integrar para obtener ✓ = ✓ (t),
ˆ ✓
✓0
d✓p
E0 � Ueff (✓)=
r
2
I1
(t� t0
) . (6.1.18)
Una vez se conoce la funcion ✓ = ✓ (t) esta puede reemplazarse en la ecuacion(6.1.13) que al integrarse permite obtener � = � (t),
� (t) =
ˆP� � P cos ✓ (t)
I1
sin2 ✓ (t)dt. (6.1.19)
Finalmente, conociendo esta funcion se puede obtener = (t) al integrarla ecuacion (6.1.6),
(t) =
ˆ t
t0
P � I3
� cos ✓
I3
dt. (6.1.20)

CAPITULO 6. APLICACIONES 172
6.1.1. Analisis de la Energıa Potencial Efectiva
Analizando el comportamiento de la energıa potencial efectiva es posibleobtener informacion acerca del sistema fısico estudiado. Para comenzar, se bus-cara la existencia de maximos o mınimos. Para ello se deriva una vez la ecuacion(6.1.16),
dUeff
d✓=
1
2
2 (P� � P cos ✓)P I1 sin3 ✓ � 2 (P� � P cos ✓)2 I
1
sin ✓ cos ✓
I21
sin4 ✓�Mgh sin ✓
(6.1.21)
dUeff
d✓=
(P� � P cos ✓)⇥
P sin2 ✓ � (P� � P cos ✓) cos ✓⇤
I1
sin3 ✓�Mgh sin ✓
(6.1.22)
dUeff
d✓=
(P� � P cos ✓) (P � P� cos ✓)
I1
sin3 ✓�Mgh sin ✓. (6.1.23)
Notese que para ✓ ! 0 se tiene dUeff
d✓ ! �1, mientras que para ✓ ! ⇡ se
tiene dUeff
d✓ ! +1. Por lo tanto debe existir un valor ✓0
para el cual la primeraderivada del potencial efectivo es cero,
dUeff
d✓
�
�
�
�
✓=✓0
= 0, (6.1.24)
es decir, la energıa potencial efectiva posee un mınimo en ✓0
. El comportamientodela funcion Ueff (✓) puede verse en la Figura 6.1.2.
6.1.1.1. Caso Particular (!3
= 0)
En el caso particular en el que !3
= 0 (i.e. el trompo no gira sobre su eje desimetrıa), el potencial efectivo toma la forma
Ueff =1
2
P 2
�
I1
sin2 ✓+Mgh cos ✓, (6.1.25)
y el sistema fısico se comporta como un pendulo esferica.
6.1.1.2. Caso Particular (!3
6= 0)
Cuando el trompo gira sobre su eje de simetrıa (!3
6= 0), la energıa totalE0 no puede tomar valores menores que el potencial efectivo Ueff ya que lacantidad
✓2 =2 (E0 � Ueff )
I1
(6.1.26)
debe ser mayor que cero.

CAPITULO 6. APLICACIONES 173
Figura 6.1.2: Energia Potencial Efectiva para el Trompo Simetrico con un puntofijo
A) Subcaso E0 = Ueff (✓0)
Si la energıa total es tal que E0 = Ueff (✓0), se tiene
✓2 = 0 (6.1.27)
y por ello el valor de la coordenada ✓ esta restringido a tomar un unico valor,✓ = ✓
0
= cte. La ecuacion (6.1.13) se convierte entonces en
� =P� � P cos ✓
0
I1
sin2 ✓0
= cte. (6.1.28)
Esto muestra que el eje de simetrıa del trompo tiene un movimiento de pre-cesion uniforme. Para profundizar un poco en este movimiento de precesion seconsiderara la condicion del mınimo para el potencial efectivo,
dUeff
d✓
�
�
�
�
✓=✓0
= 0 (6.1.29)
(P� � P cos ✓0
)⇥
P sin2 ✓0
� (P� � P cos ✓0
) cos ✓0
⇤
I1
sin3 ✓0
�Mgh sin ✓0
= 0
(6.1.30)
(P� � P cos ✓0
)P I1
sin ✓0
� (P� � P cos ✓0
)2 cos ✓0
I1
sin3 ✓0
�Mgh sin ✓0
= 0 (6.1.31)
�P sin ✓0
� �2I1
sin ✓0
cos ✓0
�Mgh sin ✓0
= 0 (6.1.32)

CAPITULO 6. APLICACIONES 174
�2 � P I1
cos ✓0
�+Mgh
I1
cos ✓0
= 0. (6.1.33)
La solucion de esta ecuacion cuadratica para la velocidad angular de precesiones
� =P
2I1
cos ✓0
"
1±s
1� 4MghI1
cos ✓0
P 2
#
. (6.1.34)
a. Trompo por encima del punto de apoyo. Cuando el trompo seencuentra por encima de su punto de apoyo, i.e. para ✓
0
< ⇡2
, se tiene cos ✓0
> 0y por lo tanto existe un valor crıtico para la precesion uniforme dado por
1� 4MghI1
cos ✓0
P 2
= 0 (6.1.35)
P 2
= 4MghI1
cos ✓0
(6.1.36)
I23
!2
3min = 4MghI1
cos ✓0
(6.1.37)
!3min =
s
4MghI1
cos ✓0
I23
. (6.1.38)
De esta forma se tiene que para !3
< !3min no existe precesion uniforme,
mientras que para !3
> !3min existen dos valores para la velocidad angular
de precesion. Para estimar estos dos valores, notese quecuando !3
� !3min el
termino 4MghI1 cos ✓0I23!
23
es pequeno. De esta forma, la ecuacion para las raices de
� se puede aproximar a
� ' I3
!3
2I1
cos ✓0
1±✓
1� 2MghI1
cos ✓0
I23
!2
3
◆�
(6.1.39)
es decir
� ' I3
!3
2I1
cos ✓0
1±✓
1� 1
2
!2
3min
!2
3
◆�
. (6.1.40)
Ası, las primera velocidad angular de precesion sera
�1
=I3
!3
2I1
cos ✓0
1 +
✓
1� 1
2
!2
3min
!2
3
◆�
(6.1.41)
�1
=I3
!3
2I1
cos ✓0
2� 1
2
!2
3min
!2
3
�
(6.1.42)
�1
⇡ I3
!3
I1
cos ✓0
(6.1.43)

CAPITULO 6. APLICACIONES 175
donde se ha despreciado el segundo termino en el lado derecho debido a que!3
� !3min. Esta velocidad es grande (movimiento rapido).
La segunda velocidad de precesion posible es
�2
=I3
!3
2I1
cos ✓0
1�✓
1� 1
2
!2
3min
!2
3
◆�
(6.1.44)
�2
=I3
!3
2I1
cos ✓0
✓
1
2
!2
3min
!2
3
◆
(6.1.45)
�2
=I3
!3
2I1
cos ✓0
✓
2MghI1
cos ✓0
I23
!2
3
◆
(6.1.46)
�2
=Mgh
I3
!3
(6.1.47)
y ya que !3
es grande, esta es una velocidad de precesion pequena (movimien-to lento). En la practica esta velocidad pequena es la que usualmente se observa.
b. Trompo por debajo del punto de apoyo. Cuando el trompo se en-cuentra por debajo de su punto de apoyo, i.e. para ✓
0
> ⇡2
, se tiene cos ✓0
< 0 ypor lo tanto siempre existen dos valores para la velocidad angular de precesion,
� =I3
2I1
cos ✓0
"
!3
±s
!2
3
� 4MghI1
cos ✓0
I23
#
. (6.1.48)
como caso particular, cuando el trompo no gira sobre su eje de simetrıa(pendulo esferico), !
3
= 0, las velociades de precesion seran
� = ± I3
2I1
cos ✓0
s
�4MghI1
cos ✓0
I23
(6.1.49)
o mejor
� = ± I3
2I1
cos ✓0
s
�
�
�
�
4MghI1
cos ✓0
I23
�
�
�
�
. (6.1.50)
B) Subcaso E0 > Ueff (✓0)
Cuando la energıa total es tal que E0 > Ueff (✓0), la coordenada angular ✓puede tomar valores entre los dos puntos dados por la interseccion de las curvascomo se muestra en la Figura 6.1.3, i.e. ✓
1
✓ ✓2
.En este caso la ecuacion para el angulo � sera
� =P� � P cos ✓
I1
sin2 ✓, (6.1.51)
pero ya que ✓ no toma un valor fijo, concluimos que la precesion no es unifor-me.En este caso, ademas del movimiento de precesion se sobrepone una nutacion

CAPITULO 6. APLICACIONES 176
Figura 6.1.3: Energia Potencial Efectiva para el Trompo Simetrico con E0 >Ueff (✓0)
(oscilacion del eje en la direccion ✓). Los angulos ✓1
y ✓2
entre los cuales socilael eje deben satisfacer la ecuacion
E0 = Ueff =1
2
(P� � P cos ✓)2
I1
sin2 ✓+Mgh cos ✓ (6.1.52)
o reescribiendo esta ecuacion
2I1
E0 sin2 ✓ = (P� � P cos ✓)2 + 2I1
Mgh sin2 ✓ cos ✓ (6.1.53)
2I1
E0�2I1
E0 cos2 ✓ = (P� � P cos ✓)2+2I1
Mgh cos ✓�2I1
Mgh cos3 ✓ (6.1.54)
2I1
Mgh cos3 ✓��2I1
E0 + P 2
�
cos2 ✓+2 (P�P � I1
Mgh) cos ✓+2I1
E0�P 2
� = 0.(6.1.55)
Esta es una ecuacion cubica para cos ✓ y por ello existen, en general, tres raices.Dos de ellas estan en el intervalo [�1,+1]. La tercera raiz es mayor que 1 y porello no representa ningun angulo fısico.
Con el fin de analizar algunas de las caracterısticas de este tipo de movi-miento, suponga que las condiciones fısicas iniciales son tales que |P�| < |P |.En este caso definimos1
cos ✓r =P�P
. (6.1.56)
1Si las condiciones inicales son tales que��P�
�� >��P
�� se define cos ✓r
=P
P
�

CAPITULO 6. APLICACIONES 177
De esta forma, la primera derivada del potencial efectivo (6.1.23) se puede re-escribir como
dUeff
d✓=
(P� � P cos ✓) (P � P� cos ✓)
I1
sin3 ✓�Mgh sin ✓ (6.1.57)
dUeff
d✓=
P 2
⇣
P�
P
� cos ✓⌘⇣
1� P�
P
cos ✓⌘
I1
sin3 ✓�Mgh sin ✓ (6.1.58)
dUeff
d✓=
P 2
(cos ✓r � cos ✓) (1� cos ✓r cos ✓)
I1
sin3 ✓�Mgh sin ✓. (6.1.59)
Notese que para ✓ = ✓r se tiene
dUeff
d✓
�
�
�
�
✓=✓r
= �Mgh sin ✓r < 0, (6.1.60)
y por lo tanto se debe tener ✓r < ✓0
(pendiente negativa en la Figura 6.1.3).De forma similar, la ecuacion para la velocidad angular de precesion (6.1.51) sepuede reescribir como
� =P
⇣
P�
P
� cos ✓⌘
I1
sin2 ✓(6.1.61)
� =P (cos ✓r � cos ✓)
I1
sin2 ✓. (6.1.62)
De acuerdo con los valores de las condiciones iniciales, son posibles varioscasos particulares,
a. Si ✓r < ✓1
.En este caso ✓ > ✓r ya que ✓
1
✓ ✓2
. Por lo tanto cos ✓r > cos ✓ y debidoa la ecuacion (6.1.62) la velocidad angular de precesion � siempre debe tener elmismo signo que P = I
3
!3
. La Figura 6.1.4 nos muestra el movimiento del ejede simetrıa del trompo en esta clase de movimiento.
b. Si ✓1
< ✓r < ✓2
.En este caso el movimiento tiene dos partes. Cuando ✓ < ✓r se tiene cos ✓ >
cos ✓r y por ello � tiene el signo contrario de P . Por otro lado, cuando ✓ > ✓rse tiene cos ✓r > cos ✓ y por ello � tiene el mismo signo de P . De esta forma,la precesion cambia de signo y por ello el movimiento del eje de siemtrıa deltrompo es el que se muestra en la Figura 6.1.5.

CAPITULO 6. APLICACIONES 178
Figura 6.1.4: Movimiento del eje de simetria del trompo cuando ✓r < ✓1
Figura 6.1.5: Movimiento del eje de simetria del trompo cuando ✓1
< ✓r < ✓2

CAPITULO 6. APLICACIONES 179
Caso ParticularUn caso muy particular del movimiento del trompo es aquel en el que
las condiciones iniciales son tales que en t = 0
✓ = ✓1
✓ = 0
� = 0
= !3
,
es decir que inicialmente se sostiene el trompo moviendose unicamente con lavelocidad angular = !
3
y formando un angulo ✓1
para luego ser liberado.De aqui se tiene (6.1.6-6.1.7)
P = I3
+ I3
� cos ✓ = I3
!3
P� =�
I1
sin2 ✓ + I3
cos2 ✓�
�+ I3
cos ✓ = I3
!3
cos ✓1
y la energıa es
E0 =1
2
(P� � P cos ✓)2
I1
sin2 ✓+
1
2I1
✓2 +Mgh cos ✓
E0 =1
2
(I3
!3
cos ✓1
� I3
!3
cos ✓1
)2
I1
sin2 ✓1
+Mgh cos ✓1
E0 = Mgh cos ✓1
.
Ademas, se tiene
cos ✓r =P�P
=I3
!3
cos ✓1
I3
!3
cos ✓r = cos ✓1
,
es decir
✓r = ✓1
.
Esto implica que la velocidad angular de precesion es cero cuando ✓ = ✓1
y por ello el movimiento del eje de simetrıa del trompo es el que se muestraen la siguiente Figura.
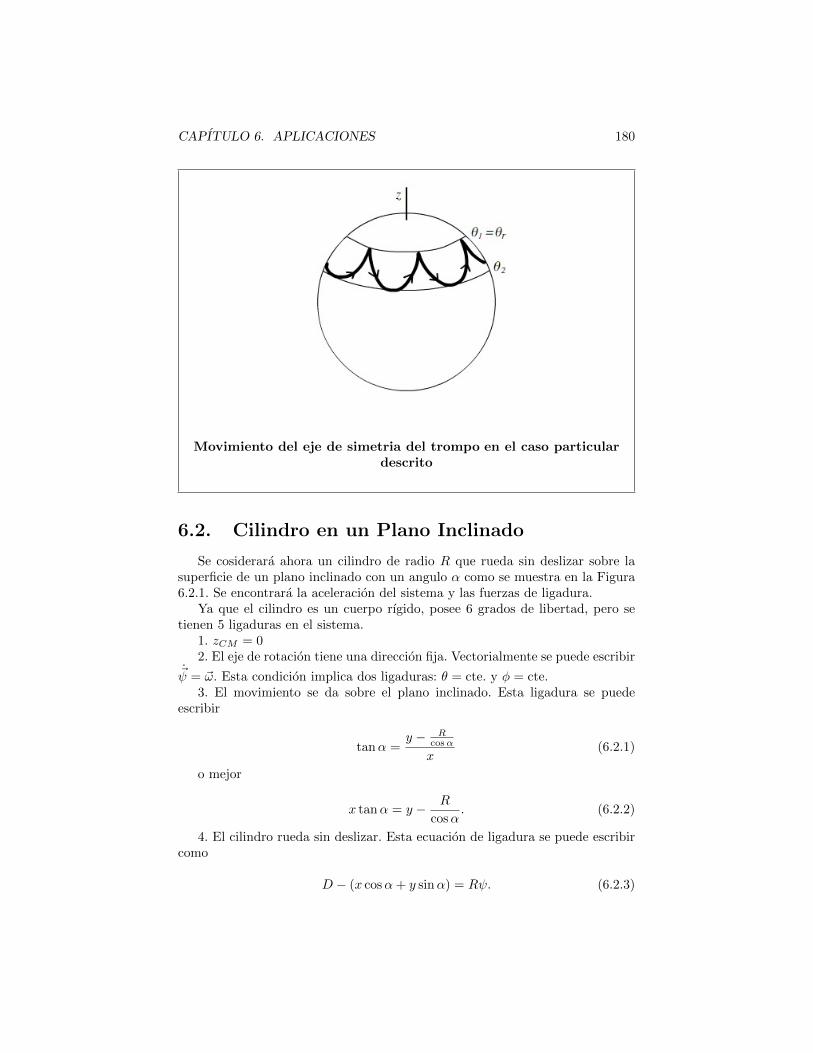
CAPITULO 6. APLICACIONES 180
Movimiento del eje de simetria del trompo en el caso particulardescrito
6.2. Cilindro en un Plano Inclinado
Se cosiderara ahora un cilindro de radio R que rueda sin deslizar sobre lasuperficie de un plano inclinado con un angulo ↵ como se muestra en la Figura6.2.1. Se encontrara la aceleracion del sistema y las fuerzas de ligadura.
Ya que el cilindro es un cuerpo rıgido, posee 6 grados de libertad, pero setienen 5 ligaduras en el sistema.
1. zCM = 02. El eje de rotacion tiene una direccion fija. Vectorialmente se puede escribir
~ = ~!. Esta condicion implica dos ligaduras: ✓ = cte. y � = cte.3. El movimiento se da sobre el plano inclinado. Esta ligadura se puede
escribir
tan↵ =y � R
cos↵
x(6.2.1)
o mejor
x tan↵ = y � R
cos↵. (6.2.2)
4. El cilindro rueda sin deslizar. Esta ecuacion de ligadura se puede escribircomo
D � (x cos↵+ y sin↵) = R . (6.2.3)

CAPITULO 6. APLICACIONES 181
Figura 6.2.1: Cilindro rodando en un plano inclincado
Para describir el sistema es conveneinte realizar un cambio de las coordena-das cartesianas (x, y) a las coordenadas (⌘, ⇠) que se muestran en la Figura6.2.2. Esta transformacion esta dada por la rotacion
(
x = ⇠ cos↵� ⌘ sin↵y = ⇠ sin↵+ ⌘ cos↵
(6.2.4)
o por la transformacion inversa
(
⇠ = x cos↵+ y sin↵
⌘ = �x sin↵+ y cos↵.(6.2.5)
De esta forma, el numero de grados de libertad del sistema es de n = 6�5 =1. Sin embargo, ya que se quieren encontrar las fuerzas de ligadura, debe utili-zarse el metodo de multiplicadores de lagrange con un espacio de configuracionde 3 dimensiones. Ası, se tomaran las coordenadas generalizadas (⇠, ⌘, ) y lasligaduras que permiten aplicar el metodo de multiplicadores seran
3. Movimiento sobre el plano inclinado:
h1
= ⌘ �R = 0 (6.2.6)
4. El cilindro rueda sin deslizar:
h2
= �D + ⇠ +R = 0. (6.2.7)
La energıa cinetica del cilindro esta dada por las contribuciones del movi-miento del centro de masa y de la rotacion,

CAPITULO 6. APLICACIONES 182
Figura 6.2.2: Cilindro rodando en un plano inclincado
T =1
2M
⇣
⇠2 + ⌘2⌘
+1
2I 2, (6.2.8)
con M la masa del cilindro e I su momento de inercia con respecto al eje desimetrıa. El potencial del cilindro es
V = Mgy = Mg (⇠ sin↵+ ⌘ cos↵) (6.2.9)
y con ello el lagrangiano sera
L =1
2M
⇣
⇠2 + ⌘2⌘
+1
2I 2 �Mg (⇠ sin↵+ ⌘ cos↵) . (6.2.10)
Para aplicar el metodo de multiplicadores se necesitan las derivadas
Q1⇠ =
@h1@⇠ = 0 Q
2⇠ =@h2@⇠ = 1
Q1⌘ = @h1
@⌘ = 1 Q2⌘ = @h2
@⌘ = 0
Q1 = @h1
@ = 0 Q2 = @h2
@ = R
(6.2.11)
y con ello las ecuaciones de Lagrange se pueden escribir
8
>
<
>
:
M ⇠ +Mg sin↵ = Q1⇠�1 +Q
2⇠�2M ⌘ +Mg cos↵ = Q
1⌘�1 +Q2⌘�2
I = Q1 �1 +Q
2 �2
(6.2.12)
y que se reducen a
8
>
<
>
:
M ⇠ +Mg sin↵ = �2
M ⌘ +Mg cos↵ = �1
I = R�2
.
(6.2.13)

CAPITULO 6. APLICACIONES 183
Combiando la primera y la tercera ecuacion se obtiene
M ⇠ +Mg sin↵ =I
R, (6.2.14)
per ademas, la ecuacion de ligadura para el movimiento de rodar sin deslizar h2
permite escribir
⇠ = �R (6.2.15)
y por ello
M ⇠ +Mg sin↵ = � I ⇠
R2
(6.2.16)
✓
M +I
R2
◆
⇠ = �Mg sin↵ (6.2.17)
Es decir que la aceleracion lineal del centro de masa es
⇠ = � g sin↵
1 + IMR2
. (6.2.18)
La aceleracion angular del cilindro es
=g sin↵
R�
1 + IMR2
� . (6.2.19)
Para encontrar las fuerzas de ligadura se encuentran los multiplicadores �1
y �2
. De la segunda ecuacion de Lagrange se tiene
�1
= M ⌘ +Mg cos↵ (6.2.20)
pero debido a la ecuacion de ligadura h1
se sabe que ⌘ = 0 y por ello
�1
= Mg cos↵. (6.2.21)
Por otro lado, de la primera ecuacion de Lagrange
�2
= M ⇠ +Mg sin↵ (6.2.22)
�2
= �Mg sin↵
1 + IMR2
+Mg sin↵ (6.2.23)
�2
= Mg sin↵
1� 1
1 + IMR2
!
(6.2.24)
�2
= Mg sin↵
IMR2
1 + IMR2
!
(6.2.25)

CAPITULO 6. APLICACIONES 184
�2
=Mg sin↵
1 + MR2
I
. (6.2.26)
Con ello, las fuerzas de ligadura resultan ser
~Q1
= Mg cos↵⌘ (6.2.27)
que corresponde a la normal del cilindro y
~Q2
=Mg sin↵
1 + MR2
I
⇣
⇠ +R ⌘
(6.2.28)
donde la componente Q2⇠ = Mg sin↵
1+
MR
2I
se identifica con la fuerza de friccion
mientras que la componente Q2 = MgR sin↵
1+
MR
2I
se identifica con el torque hecho
por la friccion.
Caso ParticularSi el cilindro es macizo, el momento de inercia es I = 1
2
MR2 y por ellola aceleracion lineal resulta ser
⇠ = �2g sin↵
3
mientras que la aceleracion angular es
=2g sin↵
3R.
La fuerza normal es
~N = ~Q1
= Mg cos↵⌘
y la fuerza de friccion es
~f = Q2⇠ ⇠ =
Mg sin↵
3⇠.
Notese que si en este caso se supone que la fuerzade friccion es propor-cional a la normal,
f = µN,
el coeficiente de friccion µ sera
µ =f
N=
1
3tan↵.
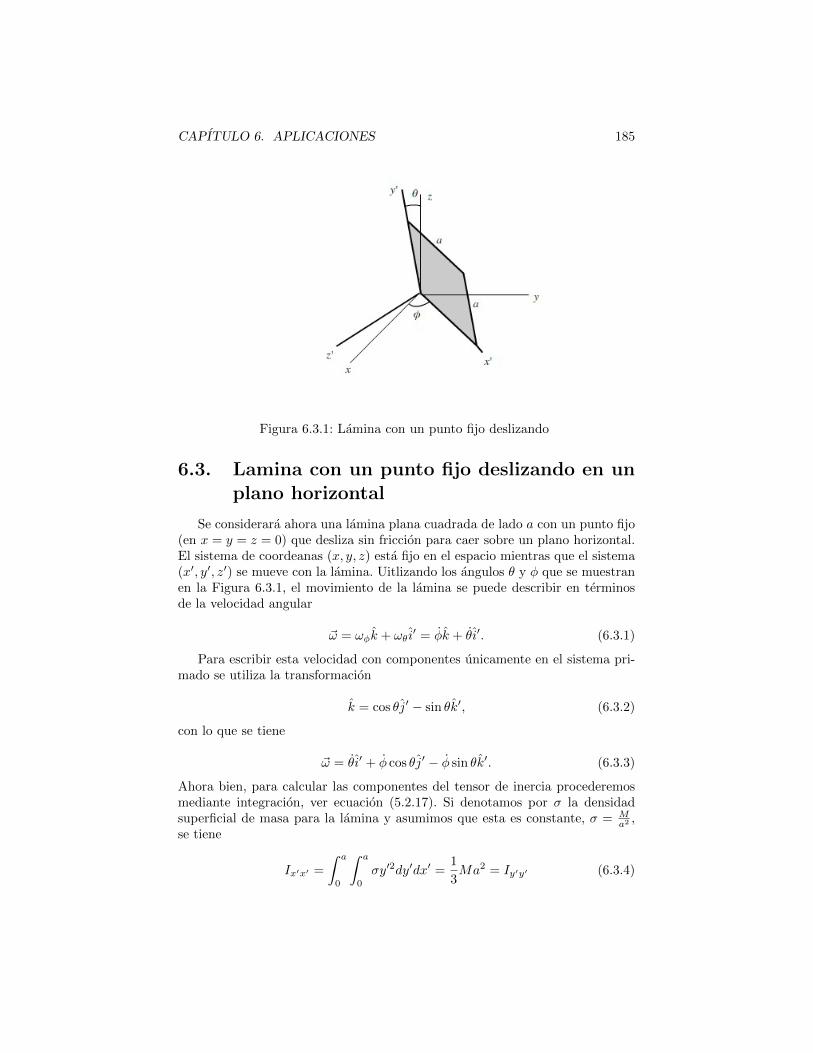
CAPITULO 6. APLICACIONES 185
Figura 6.3.1: Lamina con un punto fijo deslizando
6.3. Lamina con un punto fijo deslizando en unplano horizontal
Se considerara ahora una lamina plana cuadrada de lado a con un punto fijo(en x = y = z = 0) que desliza sin friccion para caer sobre un plano horizontal.El sistema de coordeanas (x, y, z) esta fijo en el espacio mientras que el sistema(x0, y0, z0) se mueve con la lamina. Uitlizando los angulos ✓ y � que se muestranen la Figura 6.3.1, el movimiento de la lamina se puede describir en terminosde la velocidad angular
~! = !�k + !✓ i0 = �k + ✓i0. (6.3.1)
Para escribir esta velocidad con componentes unicamente en el sistema pri-mado se utiliza la transformacion
k = cos ✓j0 � sin ✓k0, (6.3.2)
con lo que se tiene
~! = ✓i0 + � cos ✓j0 � � sin ✓k0. (6.3.3)
Ahora bien, para calcular las componentes del tensor de inercia procederemosmediante integracion, ver ecuacion (5.2.17). Si denotamos por � la densidadsuperficial de masa para la lamina y asumimos que esta es constante, � = M
a2 ,se tiene
Ix0x0 =
ˆ a
0
ˆ a
0
�y02dy0dx0 =1
3Ma2 = Iy0y0 (6.3.4)

CAPITULO 6. APLICACIONES 186
Iz0z0 =
ˆ a
0
ˆ a
0
��
x02 + y02�
dx0dy0 =1
3Ma2 +
1
3Ma2 =
2
3Ma2 (6.3.5)
Ix0y0 = Iy0x0 = �ˆ a
0
ˆ a
0
�xydx0dy0 = �1
4Ma2 (6.3.6)
Ix0z0 = Iz0x0 = Iy0z0 = Iz0y0 = 0. (6.3.7)
Ası, la energıa cinetica puede calcularse a partir de
T =1
2~! · !I · ~! (6.3.8)
T =1
2
⇣
✓, � cos ✓, � sin ✓⌘
0
@
1
3
Ma2 � 1
4
Ma2 0� 1
4
Ma2 1
3
Ma2 00 0 2
3
Ma2
1
A
0
@
✓� cos ✓� sin ✓
1
A
(6.3.9)que resulta ser
T =1
6Ma2✓2 +
1
3Ma2�2 sin2 ✓ +
1
6Ma2�2 cos2 ✓ � 1
4Ma2✓� cos ✓. (6.3.10)
El potencial es
V = Mgz = Mga
2cos ✓ (6.3.11)
y con ello el lagrangiano es
L =1
6Ma2✓2 +
1
3Ma2�2 sin2 ✓ +
1
6Ma2�2 cos2 ✓ � 1
4Ma2✓� cos ✓ �Mg
a
2cos ✓.
(6.3.12)Se observa que L no depende explıcitamente del tiempo y ya que la energıacinetica es cuadratica en las velocidades, la energıa generalizada se conserva ycorresponde a la energıa mecancia total,
E =1
6Ma2✓2 +
1
3Ma2�2 sin2 ✓ +
1
6Ma2�2 cos2 ✓ � 1
4Ma2✓� cos ✓ +Mg
a
2cos ✓.
(6.3.13)Si las condiciones iniciales son tales que en t = 0,
✓ = 0
✓ = 0
� = 0
� = 0,

CAPITULO 6. APLICACIONES 187
la energıa mecancia total sera
E =1
2Mga. (6.3.14)
Reemplazando esta constante en la ecuacion de energıa obtenemos
1
2Mga =
1
6Ma2✓2+
1
3Ma2�2 sin2 ✓+
1
6Ma2�2 cos2 ✓�1
4Ma2✓� cos ✓+Mg
a
2cos ✓
(6.3.15)
✓2 + �2�
1 + sin2 ✓�� 3
2✓� cos ✓ =
3g
a(1� cos ✓) . (6.3.16)
Se observa tambien que la coordenada � es cıclica en el lagrangiano y porello se conserva su momentum conjugado,
P� =@L
@�=
2
3Ma2� sin2 ✓ +
1
3Ma2� cos2 ✓ � 1
4Ma2✓ cos ✓ = cte. (6.3.17)
Este momentum, que corresponde en realidad a la componente lz del mo-mento angular, se conserva debido a que el peso genera un torque que va a lolargo del eje x0. Al aplicar las mismas condiciones iniciales que se consideraronpara la energıa, el momentum resulta ser
P� = lz = 0., (6.3.18)
esto es
2
3Ma2� sin2 ✓ +
1
3Ma2� cos2 ✓ � 1
4Ma2✓ cos ✓ = 0 (6.3.19)
1
3Ma2�
�
1 + sin2 ✓�� 1
4Ma2✓ cos ✓ = 0 (6.3.20)
1
3��
1 + sin2 ✓�
=1
4✓ cos ✓ (6.3.21)
� =3
4
✓ cos ✓�
1 + sin2 ✓� . (6.3.22)
Reemplaznado este resultado en la ecuacion de la energıa (6.3.16), se tiene
✓2 +9
16
✓2 cos2 ✓�
1 + sin2 ✓� � 9
8
✓2 cos2 ✓�
1 + sin2 ✓� =
3g
a(1� cos ✓) (6.3.23)
✓2"
1� 9
16
cos2 ✓�
1 + sin2 ✓�
#
=3g
a(1� cos ✓) (6.3.24)

CAPITULO 6. APLICACIONES 188
✓2 =3g
a
1� cos ✓h
1� 9
16
cos
2 ✓(1+sin
2 ✓)
i . (6.3.25)
Definiendo la funcion
f (✓) =
v
u
u
t
3g (1� cos ✓)
ah
1� 9
16
cos
2 ✓(1+sin
2 ✓)
i , (6.3.26)
se tiene
✓ = f (✓) (6.3.27)
que permite encontrar ✓ = ✓ (t) mediante integracion,
ˆ ✓
0
d✓
f (✓)= t. (6.3.28)
Con esta funcion es posible encontrar � = � (t) utilizando (6.3.22),
� =3
4
✓ (t) cos ✓ (t)�
1 + sin2 ✓ (t)� (6.3.29)
� (t) =3
4
ˆ t
0
✓ (t) cos ✓ (t)
1 + sin2 ✓ (t)dt. (6.3.30)
De esta forma, el problema queda resuelto analıticamente.
6.4. Precesion de Partıculas Cargadas en un cam-po Magnetico.
El momento magnetico de una partıcula cargada se define como
~Mi =1
2qi (~ri ⇥ ~vi) , (6.4.1)
donde qi es la carga de la partıcula y ~ri y ~vi son el vector posicion y velocidad dela partıcula referidos a un sistema de coordenadas inercial. Para una distribuciondiscreta de partıculas, esta relacion se generaliza a
~M =NX
i=1
~Mi =1
2
NX
i=1
qi (~ri ⇥ ~vi) , (6.4.2)
mientras que para distribuciones continuas se tiene
~M =
ˆd ~M =
1
2
ˆdq (~r ⇥ ~v) = 1
2
ˆ⇢e (~r) (~r ⇥ ~v) d⌦ (6.4.3)
con ⇢e (~r) la densidad de carga electrica y d⌦ el elemento de volumen.
CAPITULO 6. APLICACIONES 189
Por otro lado, el momento angular de una distribucion discreta de particulasesta definido por
~l =NX
i=1
~li =NX
i=1
mi (~ri ⇥ ~vi) , (6.4.4)
con mi la masa de la i�esima partıcula. De nuevo, la generalizacion al casocontinuo sera
~l =
ˆd~l =
ˆdm (~r ⇥ ~v) =
ˆ⇢m (~r) (~r ⇥ ~v) d⌦ (6.4.5)
con ⇢m(~r) la densidad de masa. Si la razon carga-masa�
qm
�
de todas las partıcu-las es la misma, se puede asegurar que el momento magnetico es proporcionalal momento angular,
~M / ~l (6.4.6)
o mejor
~M = �~l (6.4.7)
donde � = q2m es conocido como el radio giromagnetico. Como es conocido,
cuando un campo magnetico actua sobre un momento magnetico no produceuna fuerza neta (recordar la fuerza sobre una espira de corriente o un motorelectrico), pero si produce un torque que esta dado por
~N = ~M ⇥ ~B. (6.4.8)
En el sistema de referencia del espacio se puede hacer
~N =d~l
dt
�
�
�
�
�
esp
= �~l ⇥ ~B = �� ~B ⇥~l. (6.4.9)
Esta ecuacion muestra que el torque es perpendicular tanto al campo magneticocomo al momento angular y por ello se puede concluir que ~l es un vector demagnitud constante que rota en el espacio alrededor de la direccion de ~B convelocidad angular
~! = �� ~B. (6.4.10)
Si el campo magnetico es uniforme, produce una rotacion (precesion) uniforme
del momento angular ~l con frecuencia
! = ��B = � qB
2m, (6.4.11)
conocida como frecuencia de Larmor. Cabe notar que en el caso especıfico deelectrones, la carga electrica es q = �e y la frecuencia de Larmor es ! = eB
2m .

Capıtulo 7
Formulacion Hamiltoniana
Un sistema de n grados de libertad tiene n ecuaciones de Lagrange,
d
dt
✓
@L
@qk
◆
� @L
@qk= 0 (7.0.1)
que son ecuacioens diferenciales de sgundo orden para las coordenadas genera-lizadas. Esto quiere decir que consittuye un sistema de orden 2n, el cual estatotalmente especificado si se conocen las condiciones iniciales qk (0) y qk (0).
La formulacion hamiltoniana de la mecanica clasica se base en un cambio debase para este sistema de ecuaciones que pasa del conjunto de variables generali-zado (q, q, t) al sistema (q, p, t) con p el momento canonicamente conjugado a lavariable q. Para estudiar esta formulacion es necesario profundizar incialmenteen las transformaciones de Legendre ya que el cambio de base que se utilizaraes un caso particular de estas.
7.1. Transformaciones de Legendre
Dada una funcion de dos variables f (x, y) su diferencial esta dado por
df = udx+ vdy (7.1.1)
con
u =@f
@x
v =@f
@y.
Ahora se realizara el cambio de la base (x, y) a la base (u, y). Para elloconsiderese la funcion
g = f � ux
190
CAPITULO 7. FORMULACION HAMILTONIANA 191
cuyo diferencial sera
dg = df � udx� xdu. (7.1.2)
Reemplazando el diferencial de f en esta expresion se tiene
dg = udx+ vdy � udx� xdu (7.1.3)
dg = vdy � xdu (7.1.4)
de donde se concluye queesta corresponde a la funcion buscada, g = g (u, y),si
v =@g
@y(7.1.5)
�x =@g
@u. (7.1.6)
7.1.1. Transformacion de Legendre Total
Si se considera ahora una funcion de n variables F = F (x1
, x2
, ..., xn), sedefiniran las nuevas variables
yi =@f
@xi(7.1.7)
con i = 1, 2, ..., n. Si la matriz de segundas derivadas parciales J tiene undeterminante diferente de cero, i.e.
det [J ] = det
@2F
@xi@xj
�
6= 0, (7.1.8)
entonces se garantiza la independencia de las variables xi y yj . Es decir, se puedeafirmar que xi = xi (y1,y2, ..., yn).
Una transformacion total de Legendre se define con la funcion
G (y1
, y2
, ..., yn) =nX
i=1
xiyi � F (y1
, y2
, ..., yn) . (7.1.9)
Notese que el diferencial de esta funcion es
dG =nX
i=1
@G
@yidyi =
nX
i=1
(xidyi + yidxi)� dF (7.1.10)
y utilizando el diferencial de la funcion F ,
dF =nX
i=1
@F
@xidxi =
nX
i=1
yidxi, (7.1.11)
CAPITULO 7. FORMULACION HAMILTONIANA 192
se obtiene
dG =nX
i=1
@G
@yidyi =
nX
i=1
xidyi (7.1.12)
que muestra la correcta dependencia de la funcion G si
xi =@G
@yi. (7.1.13)
7.1.2. Transformacion de Legendre Parcial
Se considerara ahora la funcion de n+m variables F = F (x1
, x2
, ..., xn, z1, z2, ..., zm).Se definen como variables activas aquellas que se cambiaran con la transforma-cion de Legendre, en este caso las xi; y se denominan variables pasivas aquellasque no se cambiaran, en este caso las zj .
Para realizar la transformacion se definen las nuevas variables
yi =@f
@xi(7.1.14)
con i = 1, 2, ..., n. De nuevo si la matriz de segundas derivadas parciales J tieneun determinante diferente de cero, i.e.
det [J ] = det
@2F
@xi@xj
�
6= 0, (7.1.15)
entonces se garantiza la independencia de las variables xi y yj y se podra escribirxi = xi (y1,y2, ..., yn).
Una transformacion parcial de Legendre se define con la funcion
G (y1
, y2
, ..., yn, z1, z2, ..., zm) =nX
i=1
xiyi � F (y1
, y2
, ..., yn, z1, z2, ..., zm) .
(7.1.16)El diferencial de esta funcion es
dG =nX
i=1
@G
@yidyi +
mX
j=1
@G
@zjdzj =
nX
i=1
(xidyi + yidxi)� dF. (7.1.17)
Al utilizar el diferencial de la funcion F ,
dF =nX
i=1
@F
@xidxi +
mX
j=1
@F
@zjdzj =
nX
i=1
yidxi +mX
j=1
@F
@zjdzj , (7.1.18)
se obtiene

CAPITULO 7. FORMULACION HAMILTONIANA 193
dG =nX
i=1
@G
@yidyi +
mX
j=1
@G
@zjdzj =
nX
i=1
xidyi �mX
j=1
@F
@zjdzj . (7.1.19)
Esta vez la dependencia de la funcion G es correcta si
xi =@G
@yi(7.1.20)
y
@F
@zj= � @G
@zj. (7.1.21)
7.2. El Hamiltoniano
La funcion Hamiltoniana o Hamiltoniano se define como una transformacionparcial de Legendre del Lagrangiano. Ya que en general L = L (qi, qi, t) sedefinen las variables
pi =@L
@qi(7.2.1)
conocidas como momentum canonicamente conjugado a la variable qi. Se to-maran como variables pasivas los qi y t, mientras que las variables activas seranlos qi. Se define entonces el Hamiltoniano mediante
H (qi, pi, t) =nX
i=1
qipi � L (qi, qi, t) . (7.2.2)
Notese que esta funcion es exactamente igual a la definicion de la energıageneralizada dada en (2.10.13). Para comprobar la correcta dependencia delHamiltoniano, se toma su diferencial
dH =nX
i=1
@H
@qidqi +
nX
i=1
@H
@pidpi +
@H
dtdt =
nX
i=1
(qidpi + pidqi)� dL. (7.2.3)
Utilizando el diferencial del lagrangiano,
dL =nX
i=1
@L
@qidqi +
nX
i=1
@L
@qidqi +
@L
@tdt (7.2.4)
dL =nX
i=1
@L
@qidqi +
nX
i=1
pidqi +@L
@tdt, (7.2.5)
se tiene

CAPITULO 7. FORMULACION HAMILTONIANA 194
dH =nX
i=1
@H
@qidqi+
nX
i=1
@H
@pidpi+
@H
dtdt =
nX
i=1
qidpi�nX
i=1
@L
@qidqi� @L
@tdt, (7.2.6)
de donde se tienen las condiciones
@H
@t= �@L
@t(7.2.7)
@H
@pi= qi (7.2.8)
@H
@qi= � @L
@qi. (7.2.9)
Ahora bien, utilizando las ecuaciones de Lagrange se puede asegurar que
@L
@qi=
d
dt
✓
@L
@qi
◆
=dpidt
= pi. (7.2.10)
Por esta razon, la ultima de las relaciones con el hamiltoniano se puede escribir
@H
@qi= �pi. (7.2.11)
El conjunto de ecuaciones
(
@H@t = �@L@t@H@q
i
= � @L@q
i
(7.2.12)
representan los teoremas de conservacion, mientras que
(
qi = @H@p
i
pi = �@H@qi
(7.2.13)
se denominan Ecuaciones Canonicas de Hamilton. Estas conforman un sistemade 2n ecuaciones de primer orden que reemplazan las ecuaciones de Lagrange.
Ejemplo.Pendulo esferico

CAPITULO 7. FORMULACION HAMILTONIANA 195
Pendulo Esferico.
La energıa cinetica para el pendulo esferico mostrado en la Figura encoordenadas esfericas, toma la forma
T =1
2M
⇣
r2 + r2✓2 + r2�2 sin2 ✓⌘
sujeto a la condicion de una cuerda que tiene longitud constante, r = L,con lo que se tiene
T =1
2M
⇣
L2✓2 + L2�2 sin2 ✓⌘
.
El potencial viene dado por
V = �mgz = �mgL cos ✓,
con lo que el lagrangiano es
L⇣
✓,�, ✓, �⌘
=1
2M
⇣
L2✓2 + L2�2 sin2 ✓⌘
+mgL cos ✓.
Los momentum canonicamente conjugados a las variables ✓ y � son
p✓ =@L
@✓= ML2✓
p� =@L
@�= ML2� sin2 ✓.
La matriz de transformacion J (segundas derivadas) se puede obtenerfacilmente al notar que
✓
p✓p�
◆
=
✓
mL2 sin2 ✓ 00 mL2
◆✓
✓�
◆
,

CAPITULO 7. FORMULACION HAMILTONIANA 196
de donde
J =
✓
mL2 sin2 ✓ 00 mL2
◆
.
El determinante de esta matriz no es nulo,
det [J ] = m2L4 sin2 6= 0.
Definimos el Hamiltoniano del sistema mediante la transformacion deLegendre
H = p✓ ✓ + p��� L (✓,�, p✓, p�) ,
donde la dependencia de L se debe cambiar mediante la sustitucion
✓ =p✓
ML2
� =p�
ML2 sin2 ✓.
De esta forma el Hamiltoniano sera
H = p✓⇣ p✓ML2
⌘
+p�
✓
p�ML2 sin2 ✓
◆
�1
2M
"
L2
⇣ p✓ML2
⌘
2
+ L2
✓
p�ML2 sin2 ✓
◆
2
sin2 ✓
#
�mgL cos ✓
H =p2✓
ML2
++p2�
ML2 sin2 ✓� 1
2ML2
"
p2✓ +p2�
sin2 ✓
#
�mgL cos ✓
H =1
2ML2
"
p2✓ +p2�
sin2 ✓
#
�mgL cos ✓.
Integrales Primeras
Las Leyes de conservacion aplicables a este Hamiltoniano correspondena
1. El Hamiltoniano no depende explıcitamente del tiempo, i.e.
@H
@t= 0,
por lo que el Hamiltoniano debe ser constante y en este caso, correspondea la energıa mecanica total,
E =1
2ML2
"
p2✓ +p2�
sin2 ✓
#
�mgL cos ✓. (7.2.14)

CAPITULO 7. FORMULACION HAMILTONIANA 197
2. El Hamiltoniano no depende explıcitamente de la variable �, por lotanto su momento conjugado se conserva,
p� = 0
es decir
p� = cte.
Ecuaciones de HamiltonLas ecuacioens de Hamilton
(
qi = @H@p
i
pi = �@H@qi
corresponden a las cuatro ecuaciones diferenciales
8
>
>
>
>
<
>
>
>
>
:
✓ = @H@p✓
= p✓
ML2
� = @H@p�
= p�
ML2sin
2 ✓
p✓ = �@H@✓ =p2�
cos ✓
ML2sin
3 ✓�mgL sin ✓.
p� = �@H@� = 0.
Un resultado interesante se obtiene al tomar la derivada total del Hamilto-niano con respecto al tiempo,
dH
dt=
nX
i=1
@H
@qi
dqidt
+nX
i=1
@H
@pi
dpidt
+@H
@t(7.2.15)
dH
dt=
nX
i=1
@H
@qiqi +
nX
i=1
@H
@pipi +
@H
@t(7.2.16)
y utilizando las ecuaciones de Hamilton,
dH
dt= �
nX
i=1
piqi +nX
i=1
qipi +@H
@t(7.2.17)
dH
dt=@H
@t, (7.2.18)
es decir que el Hamiltoniano se conserva si no depende explıcitamente del tiem-po.

CAPITULO 7. FORMULACION HAMILTONIANA 198
7.3. Derivacion de las Ecuaciones de Hamiltona partir de un Principio Variacional
El principio variacional de Hamilton dice que a partir de la accion
I =
ˆLdt (7.3.1)
y mediante la condicion
�I = �
ˆ t2
t1
Ldt = 0 (7.3.2)
se obtienen las ecuaciones de Lagrange. Ahora bien, ya que el Hamiltoniano estadefinido como
H =X
i
piqi � L, (7.3.3)
puede invertirse esta relacion para obtener
L =X
i
piqi �H (qi, pi, t) . (7.3.4)
De esta forma, el principio variacional toma la forma
�
ˆ t2
t1
"
X
i
piqi �H
#
dt = 0 (7.3.5)
el cual se conoce como principio modificado de Hamilton. Las ecuaciones deEuler a las que lleva este principio seran:
1. Para qk,
d
dt
"
@
@qk
X
i
piqi �H
!#
� @
@qk
X
i
piqi �H
!
= 0. (7.3.6)
Ya que H = H (qi, pi, t) se tiene
dpkdt
+@H
@qk= 0 (7.3.7)
pk = �@H@qk
. (7.3.8)
2. Para pk,
d
dt
"
@
@pk
X
i
piqi �H
!#
� @
@pk
X
i
piqi �H
!
= 0 (7.3.9)

CAPITULO 7. FORMULACION HAMILTONIANA 199
0� @
@pk
X
i
piqi �H
!
= 0 (7.3.10)
qk � @H
@pk= 0 (7.3.11)
qk =@H
@pk. (7.3.12)
7.3.1. Transformaciones de Calibracion
Ahora se mostrara que las trasnformaciones de calibracion paraH no afectanel principio modificado de Hamilton. Este tipo de transformacion se escribe
H (qi, pi, t)! H 0 (qi, pi, t) = H (qi, pi, t) +dF (qi, pi, t)
dt. (7.3.13)
El principio variacional para el nuevo Hamiltoniano es
�
ˆ t2
t1
"
X
i
piqi �H 0
#
dt = �
ˆ t2
t1
"
X
i
piqi �H � dF
dt
#
dt (7.3.14)
�
ˆ t2
t1
"
X
i
piqi �H 0
#
dt = �
ˆ t2
t1
"
X
i
piqi �H
#
dt� �ˆ t2
t1
dF
dt
�
dt (7.3.15)
pero debido al principio variacional para el Hamiltoniano original el primertermino de la derecha es cero,
�
ˆ t2
t1
"
X
i
piqi �H 0
#
dt = ��ˆ t2
t1
dF
dt
�
dt (7.3.16)
�
ˆ t2
t1
"
X
i
piqi �H 0
#
dt = ��ˆ t2
t1
dF = �� {F [q (t2
) , p (t2
) , t2
]� F [q (t1
) , p (t1
) , t1
]}(7.3.17)
y ya que no existen variaciones en los extremos,
�
ˆ t2
t1
"
X
i
piqi �H 0
#
dt = 0, (7.3.18)
es decir que el principio modeificado de Hamilton no se ve afectado por trans-formaciones de calibracion.

CAPITULO 7. FORMULACION HAMILTONIANA 200
Figura 7.4.1: Diagrama de Fase
7.4. Espacio de Fase
El Espacio de Fase se define como un espacio 2n dimensional donde cadapunto corresponde a una configuracion posible del sistema fısico. Se utiliza co-mo coordenadas el conjunto {q
1
, q2
, ..., qn, p1, p2, ..., pn}. Ademas se construyeel campo vectorial denominado Velocidad de Fase definido en cada punto delespacio de fase como
~Vf = {q1
, q2
, ..., qn, p1, p2, ..., pn} . (7.4.1)
A su vez, este campo vectorial define en el espacio de fase las de nominadascurvas de fase y el conjunto de todas estas se conoce como flujo de fase. Unavision grafica de estas definiciones se puede observar en la Figura 7.4.1.
Ahora bien, a partir de las ecuaciones canonicas de Hamilton, la velocidadde fase se puede escribir como
~Vf =
⇢
@H
@p1
,@H
@p2
, ...,@H
@pn,�@H
@q1
,�@H@q
2
, ...,� @H@qn
�
. (7.4.2)
Recordando la nocion de gradiente, para el Hamiltoniano se tiene
~rH =
⇢
@H
@q1
,@H
@q2
, ...,@H
@qn,@H
@p1
,@H
@p2
, ...,@H
@pn
�
(7.4.3)
y ası es facil mostrar que ~rH es perpendicular a ~Vf . Para sistemas conservativosel Hamiltoniano es constante y por ello la condicion H = cte. define hipersu-perficies en el espacio de fase y es posible concluir que el vector ~Vf es tangentea esta hipersuperficie.

CAPITULO 7. FORMULACION HAMILTONIANA 201
Ejemplo.Particula en Caida LibreEl Hamiltoniano de una partıcula en caida libre es
H =p2
2m+mgq,
de donde se observa que las hipersuperficies H = cte. son parabolas en elespacio de fase.
El vector tangente a estas parabolas es
~Vf =
✓
@H
@p,�@H
@q
◆
=⇣ p
m,�mg
⌘
.
Si las condiciones inciales del sistema son tales que
(
p = 0
q = q1
el Hamiltoniano se puede calcular como
H = mgq1
=p2
2m+mgq,
es decir
q = q1
� p2
2m2g.
Esta ecuacion representa una familia de parabolas como se mues-tra en la Figura. Notese que si ~Vf = 0 para un cierto ~r
0
=(q
01
, q02
, ..., q0n, p01, p02, ..., p0n), entonces ~r0 es un punto fijo.
Diagrama de Fase para una partıcula en caida libre.
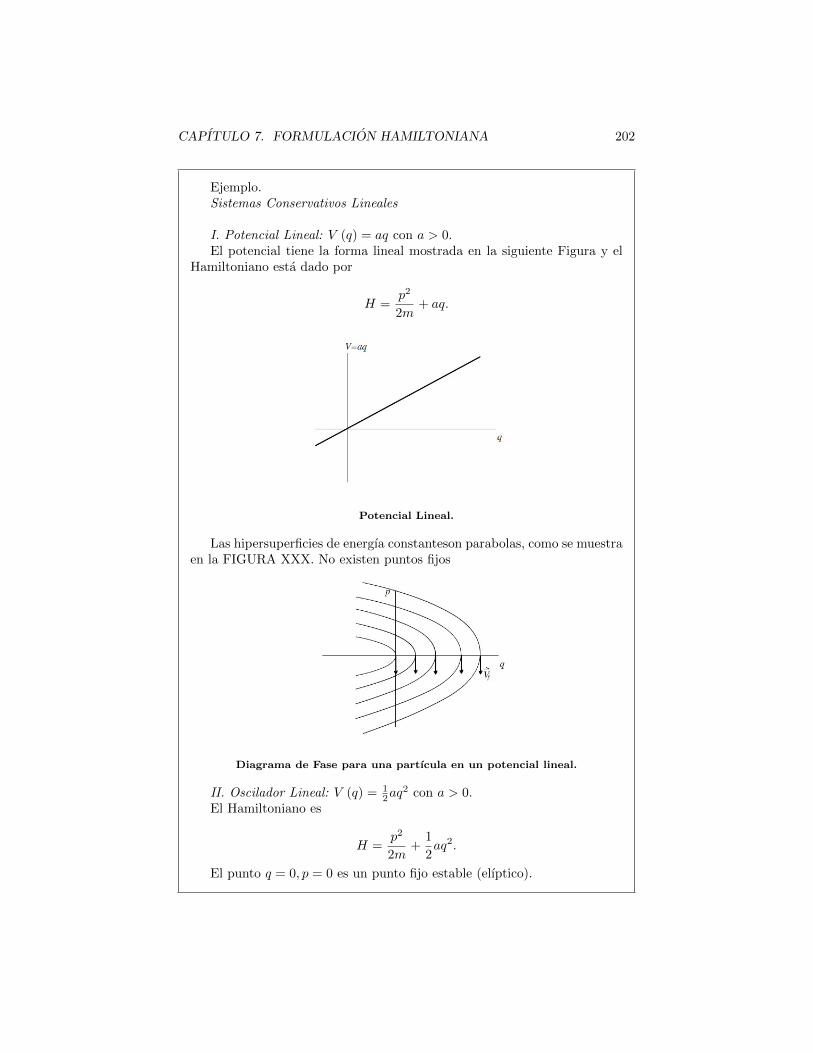
CAPITULO 7. FORMULACION HAMILTONIANA 202
Ejemplo.Sistemas Conservativos Lineales
I. Potencial Lineal: V (q) = aq con a > 0.El potencial tiene la forma lineal mostrada en la siguiente Figura y el
Hamiltoniano esta dado por
H =p2
2m+ aq.
Potencial Lineal.
Las hipersuperficies de energıa constanteson parabolas, como se muestraen la FIGURA XXX. No existen puntos fijos
Diagrama de Fase para una partıcula en un potencial lineal.
II. Oscilador Lineal: V (q) = 1
2
aq2 con a > 0.El Hamiltoniano es
H =p2
2m+
1
2aq2.
El punto q = 0, p = 0 es un punto fijo estable (elıptico).

CAPITULO 7. FORMULACION HAMILTONIANA 203
Diagrama de Fase para una partıcula en un oscilador lineal.
III. Fuerza Repulsiva: V (q) = � 1
2
aq2 con a > 0.El Hamiltoniano es
H =p2
2m+
1
2aq2.
El punto q = 0, p = 0 es un punto fijo inestable (hiperbolico). Lastrayectorias que pasan por este punto se denominan separatrices.
Diagrama de Fase para una partıcula en un potencial repulsivo.
7.4.1. Teorema de Liouville
Considere el Hamiltoniano H = H (q, p, t) que describe el comportamientode una partıcula (n = 1) tal que su diagrama de fase sea el que se muestra en laFigura XXXX. DEfinimos dos puntos sobre la trayectoria en el espacio de faseparametrizados mediante

CAPITULO 7. FORMULACION HAMILTONIANA 204
t0
! (q0
, p0
) (7.4.4)
t1
! (q1
, p1
) . (7.4.5)
Suponga que la separacion entre estos dos puntos es infinitesimal en el pa-rametro t, es decir que t
1
= t0
+ �t. Asi, se puede realizar una expansion enterminos de este parametro para obtener
8
<
:
q1
= q (t0
) +⇣
dqdt
⌘
t0�t+O �
�t2�
p1
= p (t0
) +⇣
dpdt
⌘
t0�t+O �
�t2�
.(7.4.6)
Utilizando las ecuaciones de Hamilton se puede escribir
8
<
:
q1
= q (t0
) +⇣
@H@p
⌘
t0�t
p1
= p (t0
)�⇣
@H@q
⌘
t0�t.
(7.4.7)
Estas ecuaciones muestran que este tipo de relaciones se pueden interpretarcomo un cambio de coordenadas en el espacio de fase con la forma
(
q1
= q1
(q0
, p0
)
p1
= p1
(q0
, p0
) .(7.4.8)
El Jacobiano de esta transformacione sta dado por el determinante
kJ k =�
�
�
�
�
@q1@q0
@q1@p0
@p1
@q0
@p1
@p0
�
�
�
�
�
=
�
�
�
�
�
�
1 +⇣
@2H@q0@p0
⌘
�t⇣
@2H@p2
0
⌘
�t⇣
@2H@q20
⌘
�t 1�⇣
@2H@p0@q0
⌘
�t
�
�
�
�
�
�
(7.4.9)
kJ k =
1 +
✓
@2H
@q0
@p0
◆
�t
�
1�✓
@2H
@p0
@q0
◆
�t
�
�✓
@2H
@p20
◆✓
@2H
@q20
◆
�t2 (7.4.10)
kJ k = 1 +
✓
@2H
@q0
@p0
◆
�t�✓
@2H
@p0
@q0
◆
�t+O �
�t2�
(7.4.11)
kJ k = 1 +O �
�t2�
. (7.4.12)
Ya que a primer orden en �t se tiene kJ k = 1, se concluye que el area sepreserva en el espacio de fase de una partıcula. En general, para n-partıculas seconcluye que el volumen de fase permanece constante o equivalentemente, queel flujo de fase permanece constante.

CAPITULO 7. FORMULACION HAMILTONIANA 205
7.5. Principio de la Mınima Accion
La Accion de un sistema se define como
A =
ˆ t2
t1
X
i
piqidt. (7.5.1)
El principio de mınima accion establece que en un sistema en el que elHamiltoniano H se conserve, se satisface
�A = �
ˆ t2
t1
X
i
piqidt = 0, (7.5.2)
donde � representa un nuevo tipo de variacion de la trayectoria. Para com-prender a que se hace referencia es conveniente recordar que la variacion �,introducida en capitulos anteriores, hace referencia a desplazamientos virtuales,en los cuales el tiempo permanece fijo y las coordenadas varian sujetas a las liga-duras. En estas variaciones el sistema puede moverse en formas que no ocurrendurante la evolucion del sistema fısico (e.g. si las ligaduras son no-holonomas).En general, en estas variaciones el Hamiltoniano no es conservado.
Ahora bien, la variacion � permitira incluir variaciones en el tiempo y eldesplazamiento debe ser consistente con la trayectoria del movimiento fısico,es decir que si el Hamiltoniano se conserva en el sistema fısico, tambien debeconservarse en la trayectoria de la variacion. Esta construccion implica que eltiempo a lo largo de las trayectorias variadas no es necesariamente igual ya queeste puede variar de tal manera que H permanezca constante. De esta forma lavariacion � incluye variaciones de t incluso en los puntos extremos (aun cuandolas variaciones de los qi sean cero en estos puntos).
La trayectoria variada en el espacio de configuracion puede ser igual paralas variaciones � y �; pero en � el sistema viaja con una velocidad tal que elintervalo de tiempo recorrido sea igual para la trayectoria original y la variada,mientras que en � el sistema viaja a traves de ella con diferente velocidad detal forma que H permanezca constante.
Si qi = qi (t) entonces
�qi = �qi + qi�t. (7.5.3)
Por lo tanto, para cualquier funcion f = f (qi, t) se tiene
�f =X
i
@f
@qi�qi +
@f
@t�t (7.5.4)
�f =X
i
@f
@qi�qi +
X
i
@f
@qiqi�t+
@f
@t�t (7.5.5)
�f =X
i
@f
@qi�qi +
X
i
@f
@qiqi +
@f
@t
!
�t (7.5.6)
CAPITULO 7. FORMULACION HAMILTONIANA 206
�f = �f + f�t. (7.5.7)
Ahora bien, la accion se puede escribir como
A =
ˆ t2
t1
X
i
piqidt =
ˆ t2
t1
[L+H] dt. (7.5.8)
Si H se conserva, la segunda integral se puede realizar para obtener
A =
ˆ t2
t1
X
i
piqidt =
ˆ t2
t1
Ldt+H (t2
� t1
) . (7.5.9)
Realizando la variacion � a esta ecuacion se tiene
�A = �
ˆ t2
t1
Ldt+H (�t2
��t1
) (7.5.10)
�A = �
ˆ t2
t1
Ldt+ H�t|t2t1 . (7.5.11)
La integral del lado derecho es
�
ˆ t2
t1
Ldt = �I (qi, t2)��I (qi,t1) (7.5.12)
por lo que al aplicar (7.5.7),
�
ˆ t2
t1
Ldt = �I (t2
) + I (t2
)�t2
� �I (t1
)� I (t1
)�t1
(7.5.13)
�
ˆ t2
t1
Ldt = �I (t2
)� �I (t1
) + I (t2
)�t2
� I (t1
)�t1
(7.5.14)
�
ˆ t2
t1
Ldt = �
ˆ t2
t1
Ldt+ L�t|t2t1 . (7.5.15)
El primer termino del lado derecho resulta ser
�
ˆ t2
t1
Ldt =
ˆ t2
t1
�Ldt =
ˆ t2
t1
X
i
✓
@L
@qi�qi +
@L
@qi�qi
◆
dt (7.5.16)
y por las ecuaciones de Lagrange,
�
ˆ t2
t1
Ldt =
ˆ t2
t1
X
i
d
dt
✓
@L
@qi
◆
�qi +@L
@qi�qi
�
dt (7.5.17)
�
ˆ t2
t1
Ldt =
ˆ t2
t1
X
i
d
dt
✓
@L
@qi�qi
◆�
dt. (7.5.18)

CAPITULO 7. FORMULACION HAMILTONIANA 207
Utilizando la relacion (7.5.3),
�
ˆ t2
t1
Ldt =X
i
ˆ t2
t1
d
dt
✓
@L
@qi�qi � @L
@qiqi�t
◆�
dt (7.5.19)
�
ˆ t2
t1
Ldt =X
i
✓
@L
@qi�qi � @L
@qiqi�t
◆
�
�
�
�
�
t2
t1
. (7.5.20)
En los extremos, los �qi son cero y por ello
�
ˆ t2
t1
Ldt = �X
i
@L
@qiqi�t
�
�
�
�
�
t2
t1
. (7.5.21)
Utilizando la definicion del momentum canonicamente conjugado,
�
ˆ t2
t1
Ldt = �X
i
piqi�t
�
�
�
�
�
t2
t1
. (7.5.22)
De esta forma, la ecuacion (7.5.15) sera
�A = �X
i
piqi�t
�
�
�
�
�
t2
t1
+ L�t|t2t1 + H�t|t2t1 (7.5.23)
�A = �"
�X
i
piqi + L+H
#
�t
�
�
�
�
�
t2
t1
, (7.5.24)
y debido a la definicion del Hamiltoniano, se obtiene finalmente la condicionbuscada
�A = 0. (7.5.25)
7.6. Coordenadas Cıclicas y Metodo de Routh
Una coordenada se denomina cıclica si no aparece explıcitamente en el La-grangiano, i.e. @L
@qk
= 0. El momento canonicamente conjugado a esta coorde-
nada, pk = @L@q
k
, es constante y por ello, las ecuaciones de Hamilton implicanque
pk = �@H@qk
= 0, (7.6.1)
es decir que qk tampoco aparece en el Hamiltoniano.Cuando la coordenada qk es cıclica, la dependencia de la funcion lagrangiana
se puede especificar mediante
CAPITULO 7. FORMULACION HAMILTONIANA 208
L = L [q1
, q2
, ..., qk�1
, qk+1
, ..., qn, q1, q2, ..., qk, ..., qn, t] (7.6.2)
y ya que el momento conjugado es constante, podemos hacer pk = ↵ con lo quela dependencia de la funcion Hamiltoniana es
H = H [q1
, q2
, ..., qk�1
, qk+1
, ..., qn, p1, p2, ...,↵, ..., pn, t] . (7.6.3)
Esto muestra que aun cuando L tiene n grados de libertad, H tiene solamenten � 1 grados de libertad. El comportamiento de la coordenada cıclica en eltiempo esta dado por la ecuacion de Hamilton
qk =@H
@↵. (7.6.4)
7.6.1. Metodo de Routh
Este procedimiento consiste en transformar de la base (q, q) a la base (q, p)unicmaente las coordenadas cıclicas. Si se tiene un sistema de n grados de li-bertad con m coordenadas cıclicas q
1
, q2
, ..., qm, se define el Routhiano como latransformada parcial de Legendre
R (q1
, q2
, ..., qn, p1, p2, ..., pm, qm+1
, ..., qn, t) =mX
j=1
pj qj�L (q1
, q2
, ..., qn, q1, ..., qn, t) .
(7.6.5)Ası, se tiene
dR =nX
i=1
@R
@qidqi +
mX
j=1
@R
@pjdpj +
nX
k=m+1
@R
@qkdqk +
@R
@tdt, (7.6.6)
pero de la definicion del Routhiano tambien se tiene
dR =mX
j=1
(qjdpj + pjdqj)� dL (7.6.7)
y reemplazando el diferencial del lagrangiano,
dR =mX
j=1
(qjdpj + pjdqj)�nX
i=1
@L
@qidqi �
nX
i=1
@L
@qidqi � @L
@tdt (7.6.8)
dR =mX
j=1
qjdpj �nX
i=1
@L
@qidqi +
mX
j=1
✓
pj � @L
@qj
◆
dqj �nX
k=m+1
@L
@qkdqk � @L
@tdt.
(7.6.9)Por la definicion del momento conjugado,

CAPITULO 7. FORMULACION HAMILTONIANA 209
dR =mX
j=1
qjdpj �nX
k=1
@L
@qidqi �
nX
k=m+1
@L
@qkdqk � @L
@tdt. (7.6.10)
Comparando esta ecuacion con (7.6.6) se obtienen el conjunto de ecuaciones,
@L
@qi= �@R
@qipara (i = 1, ..., n) , (7.6.11)
qj =@R
@pjpara (j = 1, ...,m) , (7.6.12)
@L
@qk= � @R
@qkpara (k = m+ 1, ..., n) (7.6.13)
y
@L
@t= �@R
@t. (7.6.14)
Ya que los momentum conjugados a las coordenadas cıclicas son constantes,estos se pueden escribir como pj = ↵j y con ello la segunda de estas ecuacioneses
qj =@R
@↵jpara (j = 1, ...,m) . (7.6.15)
De las ecuaciones de Lagrange para las coordenadas cıclicas,
d
dt
✓
@L
@qj
◆
� @L
@qj= 0 (7.6.16)
dpjdt�✓
� @R@qj
◆
= 0, (7.6.17)
es decir
pj = � @R@qj
para (j = 1, ...,m) . (7.6.18)
Estas relaciones permiten escribir las ecuaciones de Lagrange para las coor-denadas no-cıclicas en terminos del Routhiano. Para ello notese que
d
dt
✓
@L
@qk
◆
� @L
@qk= 0 (7.6.19)
d
dt
✓
� @R@qk
◆
�✓
� @R@qk
◆
= 0 (7.6.20)
d
dt
✓
@R
@qk
◆
� @R
@qk= 0 para (k = m+ 1, ..., n) . (7.6.21)

CAPITULO 7. FORMULACION HAMILTONIANA 210
7.6.1.1. Ecuaciones de Routh
Resumiendo, las ecuaciones de Routh para las coordenadas cıclicas son
qj =@R
@↵jpara (j = 1, ...,m) , (7.6.22)
mientras que las ecuaciones para las coordenadas no-cıclicas se tiene
d
dt
✓
@R
@qk
◆
�✓
@R
@qk
◆
= 0 para (k = m+ 1, ..., n) . (7.6.23)
7.6.1.2. Teoremas de Conservacion
Los teoremas de conservacion se representan por el par de ecuaciones
(
@L@q
i
= � @R@q
i
para (i = 1, ..., n)@L@t = �@R@t .
(7.6.24)
7.7. Ecuaciones de Hamilton en Forma Matri-cial
Para un sistema de un grado de libertad (n = 1) las ecuaciones de Hamilton
(
q = @H@p
p = �@H@q(7.7.1)
se pueden escribir en forma matricial en la forma
✓
qp
◆
=
✓
0 1�1 0
◆
@H@p
�@H@q
!
. (7.7.2)
Definiendo
⌘ =
✓
qp
◆
(7.7.3)
⌘ =
✓
qp
◆
(7.7.4)
E =
✓
0 1�1 0
◆
(7.7.5)
@H
@⌘=
@H@p
�@H@q
!
, (7.7.6)
las ecuaciones de Hamilton se pueden escribir en forma compacta como
CAPITULO 7. FORMULACION HAMILTONIANA 211
⌘ = E@H
@⌘. (7.7.7)
Para un sistema de n grados de libertad la definicion de los elementos ma-triciales sera
⌘ =
0
B
B
B
B
B
B
B
B
@
q1
...qnp1
...pn
1
C
C
C
C
C
C
C
C
A
(7.7.8)
⌘ =
0
B
B
B
B
B
B
B
B
@
q1
...qnp1
...pn
1
C
C
C
C
C
C
C
C
A
(7.7.9)
E =
✓
0 1n
�1n 0
◆
(7.7.10)
@H
@⌘=
0
B
B
B
B
B
B
B
B
B
@
@H@q1...@H@q
n
@H@p1
...@H@p
n
1
C
C
C
C
C
C
C
C
C
A
(7.7.11)
donde 1n es la matriz identidad en n dimensiones, y con ello las ecuacionesde Hamilton continuan siendo
⌘ = E@H
@⌘. (7.7.12)
7.8. Corchetes de Poisson
Para las funciones
u = u (q, p, t) (7.8.1)
v = v (q, p, t) (7.8.2)
w = w (q, p, t) (7.8.3)

CAPITULO 7. FORMULACION HAMILTONIANA 212
se define el corchete de Poisson como la funcion
[u, v]q,p =X
i
✓
@u
@qi
@v
@pi� @u
@pi
@v
@qi
◆
. (7.8.4)
De esta definicion es inmediato comprobar que se satisfacen las propiedades
1. [u, u]q,p = 0
2. Antisimetrıa: [u, v]q,p = � [v, u]q,p
3. Linealidad: [↵u+ �v, w]q,p = ↵ [u,w]q,p + � [v, w]q,p
4. [uv,w]q,p = u [v, w]q,p + [u,w]q,p v
5. Identidad de Jacobi: [u, [v, w]]q,p + [v, [w, u]]q,p + [w, [u, v]]q,p = 0.
Esta definicion muestra que los corchetes de Poisson forman un Algebra de Lie.
7.8.1. Corchetes Fundamentales
Como caso particular de los corchetes de Poisson se definen los corchetesfundamentales,
a) Si u = qj y v = qk se tiene[qj , qk]q,p = 0
b) Si u = pj y v = pk se tiene[pj , pk]q,p = 0
c) Si u = qj y v = pk se tiene[qj , pk]q,p = �jk.
Estos corchetes jugaran un papel muy importante en el calculo de diferentesrelaciones en los siguientes capıtulos.
7.9. Ecuaciones de Hamilton y Corchetes de Pois-son
Las ecuaciones de Hamilton se pueden reescribir utilizando los corchetes dePoisson. Para ello notese que
[qj , H]q,p =X
i
✓
@qj@qi
@H
@pi� @qj@pi
@H
@qi
◆
=X
i
�ij@H
@pi=@H
@pj(7.9.1)
CAPITULO 7. FORMULACION HAMILTONIANA 213
[pj , H]q,p =X
i
✓
@pj@qi
@H
@pi� @pj@pi
@H
@qi
◆
= �X
i
�ij@H
@qi= �@H
@qj. (7.9.2)
Utilizando las ecuaciones de Hamilton se tiene que
(
[qj , H]q,p = qj
[pj , H]q,p = pj. (7.9.3)
Por otro lado, para cualquier funcion F = F (q, p, t) se tiene
dF
dt=X
i
✓
@F
@qiqi +
@F
@pipi
◆
+@F
@t(7.9.4)
dF
dt=X
i
✓
@F
@qi
@H
@pi� @F
@pi
@H
@qi
◆
+@F
@t(7.9.5)
dF
dt= [F,H]q,p +
@F
@t. (7.9.6)
Si F es una integral primera, i.e. dFdt = 0, esta relacion sera
dF
dt= [F,H]q,p +
@F
@t= 0 (7.9.7)
@F
@t= [H,F ]q,p (7.9.8)
y si ademas F no depende explıcitamente del tiempo, F = F (q, p) esta relacionse reduce a
[H,F ]q,p = 0. (7.9.9)
Ejemplo.Al aplicar la ecuacion (7.9.6) al Hamiltoniano se obtiene de inmediato
dH
dt= [H,H]q,p +
@H
@t
dH
dt=@H
@t.

CAPITULO 7. FORMULACION HAMILTONIANA 214
7.9.1. Teorema de Poisson
El teorema de Poisson asegura que el corchete de dos primeras integrales estambien una primera integral. Para mostrarlo, sean u = u (q, p) y v = v (q, p)dos primeras integrales, es decir
du
dt=
dv
dt= 0 (7.9.10)
o equivalentemente
[u,H]q,p = [v,H]q,p = 0. (7.9.11)
Aplicando la identidad de Jacobi se tiene
[u, [v,H]]q,p + [v, [H,u]]q,p + [H, [u, v]]q,p = 0 (7.9.12)
[u, 0]q,p + [v, 0]q,p + [H, [u, v]]q,p = 0 (7.9.13)
[H, [u, v]]q,p = 0 (7.9.14)
es decir que [u, v]q,p tambien es una primera integral.
7.9.2. Corchetes de Poisson en Forma Matricial
En el caso de un sistema de un grado de libertad (n = 1), la definicion delcorchete de Poisson para dos funciones u = u (q, p, t) y v = v (q, p, t) permiteescribir
[u, v]q,p =@u
@q
@v
@p� @u
@p
@v
@q, (7.9.15)
que se puede escribir en forma matricial como
[u, v]q,p =⇣
@u@q
@u@p
⌘
✓
0 1�1 0
◆
@v@q@v@p
!
. (7.9.16)
Si se definen los elementos matriciales
@u
@⌘=
@u@q@u@p
!
(7.9.17)
@v
@⌘=
@v@q@v@p
!
(7.9.18)
E =
✓
0 1�1 0
◆
, (7.9.19)
el corchete de Poisson se escribe

CAPITULO 7. FORMULACION HAMILTONIANA 215
[u, v]q,p =g@u
@⌘E@v
@⌘. (7.9.20)
Notese que la matriz E puede escribirse en terminos de los corchetes funda-menteales,
E =
✓
0 1�1 0
◆
=
✓
[q, q] [q, p][p, q] [p, p]
◆
(7.9.21)
o mejorE = [⌘, ⌘]⌘. (7.9.22)
La extension a sistmeas de n-partıculas es directa.
7.10. Parentesis de Lagrange
En una forma muy similar se definen los parentesis de Lagrange para dosfunciones u = u (q, p, t) y v = v (q, p, t) como
{u, v}q,p =X
i
✓
@qi@u
@pi@v� @qi@v
@pi@u
◆
, (7.10.1)
aunque estos parentesis no satisfacen la identidad de Jacobi y por ello no formanun Algebra de Lie. Los parentesis fundamentales resultan ser
{qi, qj}q,p = {pi, pj}q,p = 0 (7.10.2)
y
{qi, pj}q,p = �ij . (7.10.3)
Siguiendo el mismo procedimiento descrito para los corchetes de Poisson, esposible escribir en forma matricial los parentesis de Lagrange como
{u, v}q,p =g@⌘
@uE@⌘
@v. (7.10.4)
Capıtulo 8
TransformacionesCanonicas
Las transformaciones de punto son aquellas que se pueden escribir en laforma
Qi = Qi (qj , t) (8.0.1)
donde las Qi son las nuevas coordenadas y las qj son las antiguas coordenadas.Sin embargo, en la formulacion Hamiltoniana los momentos generalizados sonvariables independientes tambien, por lo que un cambio de coordenadas debeescribirse en terminos generales como
(
Qi = Qi (qj , pj , t)
Pi = Pi (qj , pj , t). (8.0.2)
Ahora bien, para la formulacion Hamiltoniana nos interesaran unicamentelas transformaciones para las cuales Q y P sean canonicas, es decir, aquellas paralas cuales exista una funcion K (Qi, Pi, t) tal que las ecuaciones de movimientotomen la forma Hamiltoniana,
Qi =@K
@Pi(8.0.3)
Pi = � @K@Qi
. (8.0.4)
Las transformaciones que satisfacen estas condiciones se denominan Trans-formaciones Canonicas o de Contacto, y la funcion K hace el papel del Hamilto-niano en el nuevo sistema. A partir de lo descrito en capitulos anteriores, es facilcomprobar que las nuevas coordenadas deben satisfacer un principio modificadode Hamilton,
216

CAPITULO 8. TRANSFORMACIONES CANONICAS 217
�
ˆ t2
t1
"
X
i
PiQi �K (Qj , Pj , t)
#
dt = 0 (8.0.5)
al igual que las coordenadas antiguas satisfacen
�
ˆ t2
t1
"
X
i
piqi �H (qj , pj , t)
#
dt = 0. (8.0.6)
La validez simultanea de las dos integrales no requiere que los integrandossean iguales, ya que estos pueden diferir en una derivada total del tiempo deuna funcion arbitraria F . Para comprender esto, notese que el integral entre losdos puntos extremos de este termino sera
ˆ t2
t1
✓
dF
dt
◆
dt = F (t2
)� F (t1
) (8.0.7)
y la variacion de esta integral sera cero pues como es costumbre, se asume quelas variaciones en los extremos son nulas.
Ya que la funcion arbitraria F especifıca completamente la transformacion,se le denomina Funcion Generadora. En general, F es funcion de las coordena-das nuevas y antiguas,es decir de 4n variables, pero utilizando las ecuacionesde transformacion, la funcion F se puede escribir en terminos de tan solo 2nvariables (sin contar t). De esta forma, la funcion generadora puede escribirseen cuatro formas de acuerdo con su dependencia:
F1
(q,Q, t) F2
(q, P, t) F3
(p,Q, t) F4
(p, P, t) (8.0.8)
y las circunstancias del problema deciden cual forma se utiliza.
8.0.1. Caso 1
Si tomamos la forma F1
(q,Q, t) de la funcion generadora se tiene que
X
i
piqi �H (qj , pj , t) =X
i
PiQi �K (qj , pj , t) +dF
1
(q,Q, t)
dt. (8.0.9)
Ademas, se tiene que
dF1
(q,Q, t)
dt=X
j
dF1
dqjqj +
X
j
dF1
dQjQj +
@F1
@t(8.0.10)
y por lo tanto
X
i
piqi �H =X
i
PiQi �K +X
j
dF1
dqjqj +
X
j
dF1
dQjQj +
@F1
@t. (8.0.11)

CAPITULO 8. TRANSFORMACIONES CANONICAS 218
Ya que en este caso las variables independientes son las qi y las Qi, a partirde esta ecuacion se tienen las condiciones
8
>
<
>
:
pi = dF1dq
i
Pi = � dF1dQ
i
K = H + @F1@t .
(8.0.12)
8.0.2. Caso 2
Para obtener la forma F2
(q, P, t) de la funcion generadora se realiza unatransformacion de Legendre ya que del caso anterior se tiene Pi = � dF1
dQi
. Porlo tanto hacemos
F2
(q, P, t) = F1
(q,Q, t) +X
i
PiQi (8.0.13)
o equivalentemente
F1
= F2
�X
i
PiQi. (8.0.14)
De esta forma se tiene que
X
i
piqi �H (qj , pj , t) =X
i
PiQi �K (qj , pj , t) +d
dt
"
F2
�X
i
PiQi
#
(8.0.15)
X
i
piqi �H (qj , pj , t) =X
i
PiQi �K (qj , pj , t) +dF
2
dt�X
i
PiQi �X
i
PiQi
(8.0.16)
X
i
piqi �H (qj , pj , t) = �X
i
PiQi �K (qj , pj , t) +dF
2
dt(8.0.17)
Esta vez se tiene
dF2
(q, P, t)
dt=X
j
dF2
dqjqj +
X
j
dF2
dPjPj +
@F2
@t(8.0.18)
y por ello
X
i
piqi �H = �X
i
PiQi �K +X
j
dF2
dqjqj +
X
j
dF2
dPjPj +
@F2
@t(8.0.19)
En este caso las variables independientes son las qi y las Pi, por lo que apartir de esta ecuacion se tienen las condiciones

CAPITULO 8. TRANSFORMACIONES CANONICAS 219
8
>
<
>
:
pi = dF2dq
i
Qi = dF2dP
i
K = H + @F2@t .
(8.0.20)
8.0.3. Caso 3
La forma F3
(Q, p, t) de la funcion generadora se obtiene a partir de unatransformacion de Legendre ya que del Caso 1 se tiene pi =
dF1dq
i
. Por lo tantohacemos
F3
(Q, p, t) = F1
(q,Q, t)�X
i
piqi (8.0.21)
o equivalentemente
F1
= F3
+X
i
piqi. (8.0.22)
De esta forma se tiene
X
i
piqi �H (qj , pj , t) =X
i
PiQi �K (qj , pj , t) +d
dt
"
F3
+X
i
piqi
#
(8.0.23)
X
i
piqi �H (qj , pj , t) =X
i
PiQi �K (qj , pj , t) +dF
3
dt+X
i
piqi +X
i
piqi
(8.0.24)
�X
i
piqi �H (qj , pj , t) =X
i
PiQi �K (qj , pj , t) +dF
3
dt(8.0.25)
Ahora se tiene
dF3
(Q, p, t)
dt=X
j
dF3
dQjQj +
X
j
dF3
dpjpj +
@F3
@t(8.0.26)
y por ello
�X
i
piqi �H =X
i
PiQi �K +X
j
dF3
dQjQj +
X
j
dF3
dpjpj +
@F3
@t(8.0.27)
En este caso las variables independientes son las Qi y las pi, por lo que apartir de esta ecuacion se tienen las condiciones
8
>
<
>
:
qi = �dF3dp
i
Pi = � dF3dQ
i
K = H + @F3@t .
(8.0.28)

CAPITULO 8. TRANSFORMACIONES CANONICAS 220
8.0.4. Caso 4
Finalmente, la forma F4
(p, P, t) de la funcion generadora se obtiene a partirde la forma F
3
mediante una transformacion de Legendre ya que se tiene Pi =� dF3
dQi
. Esta vez se hace
F4
(p, P, t) = F3
(Q, p, t) +X
i
PiQi (8.0.29)
o equivalentemente
F3
= F4
�X
i
PiQi. (8.0.30)
Utilizando el caso anterior se puede escribir
F3
= F1
�X
i
piqi = F4
�X
i
PiQi (8.0.31)
de donde
F1
= F4
+X
i
piqi �X
i
PiQi. (8.0.32)
De esta forma se tiene
X
i
piqi �H (qj , pj , t) =X
i
PiQi �K (qj , pj , t) +d
dt
"
F4
+X
i
piqi �X
i
PiQi
#
(8.0.33)
X
i
piqi�H (qj , pj , t) =X
i
PiQi�K (qj , pj , t)+dF
4
dt+X
i
piqi+X
i
piqi�X
i
PiQi�X
i
PiQi
(8.0.34)
�X
i
piqi �H (qj , pj , t) = �X
i
PiQi �K (qj , pj , t) +dF
4
dt(8.0.35)
Esta vez
dF4
(p, P, t)
dt=X
j
dF4
dpjpj +
X
j
dF4
dPjPj +
@F4
@t(8.0.36)
y por ello
�X
i
piqi �H = �X
i
PiQi �K +X
j
dF4
dpjpj +
X
j
dF4
dPjPj +
@F4
@t(8.0.37)

CAPITULO 8. TRANSFORMACIONES CANONICAS 221
En este caso las variables independientes son las pi y las Pi y por ello lascondiciones son
8
>
<
>
:
qi = �dF4dp
i
Qi = dF4dP
i
K = H + @F4@t .
(8.0.38)
EjemploTransformacion IdentidadLa transformacion identidad se obtiene a partir de la funcion generadora
F2
(q, P, t) =X
j
qjPj , (8.0.39)
ya que a partir de las condiciones obtenidas se tiene
8
>
<
>
:
pi = dF2dq
i
= Pi
Qi = dF2dP
i
= qiK = H.
(8.0.40)
EjemploTransformacion de PuntoLa transformacion de punto se obtiene a partir de la funcion generadora
F2
(q, P, t) =X
j
fj (q1, q2, ..., qn, t)Pj , (8.0.41)
donde fj es cualquier funcion (o conjunto de funciones independientes). Aesta transformacion se le denomina de punto porque a partir de las condi-ciones obtenidas se tiene que las nuevas coordenadas generalizadas son
Qi =dF
2
dPi= fi (q1, q2, ..., qn, t) , (8.0.42)
y esta relacion no depende de ninguno de los momentos pi ni Pi. Ya que lasfunciones fi son totalmente arbitrarias, este caso incluye todas las trans-formaciones de punto y todas ellas son canonicas. Las relaciones restantesresultan ser
(
pi = dF2dq
i
=P
j@f
j
@qi
Pj
K = H +P
j@f
j
@t Pj .(8.0.43)

CAPITULO 8. TRANSFORMACIONES CANONICAS 222
EjemploTransformaciones OrtogonalesLas transformaciones ortogonales son un caso particular de las transfor-
maciones de punto en la cual se toma
fj =X
k
ajkqk (8.0.44)
donde los coeficientes ajk satisfacen
X
i
akiaji = �kj . (8.0.45)
Ası, la funcion generadora es
F2
(q, P, t) =X
j
X
k
ajkqkPj , (8.0.46)
y por ello las nuevas coordenadas generalizadas son simplemente
Qi =dF
2
dPi=X
k
aikqk. (8.0.47)
La relacion para los momentos generalizados es
pi =dF
2
dqi=X
j
ajiPj . (8.0.48)
Para despejar los nuevos momentos Pj en terminos de los antiguos pi to-mamos esta ecuacion yhacemos
X
i
akipi =X
i
X
j
akiajiPj (8.0.49)
y por la relacion de ortogonalidad,
X
i
akipi =X
j
�kjPj , (8.0.50)
de donde se obtiene
Pk =X
i
akipi. (8.0.51)
Esta relacion muestra que el momentum tambien transforma de maneraortogonal.
(
pi = dF2dq
i
=P
j@f
j
@qi
Pj
K = H +P
j@f
j
@t Pj .(8.0.52)

CAPITULO 8. TRANSFORMACIONES CANONICAS 223
EjemploTransformacion de IntercambioLa transformacion de intercambio de coordenadas y momentum se ob-
tiene a partir de la funcion generadora
F1
(q,Q, t) =X
j
qjQj , (8.0.53)
ya que a partir de las condiciones obtenidas se tiene
8
>
<
>
:
pi = dF1dq
i
= Qi
Pi = � dF1dQ
i
= �qiK = H.
(8.0.54)
8.1. El Oscilador Armonico
Como una aplicacion completa de la aplicacion de las transformaciones canoni-cas en la resolucion de un sistema fısico, considere una partıcula que se muevebajo el potencial
V =kq2
2(8.1.1)
donde k es una constante. El Hamiltoniano de este sistema sera
H =p2
2m+
kq2
2(8.1.2)
donde m es la masa de la partıcula. Definiendo la constante !2 = km , el Hamil-
toniano se escribe
H =p2
2m+
m!2q2
2. (8.1.3)
Para resolver este problema utilizaremos la transformacion canonica genera-da por la funcion
F1
=1
2m!q2 cotQ. (8.1.4)
Las condiciones para este tipo de transformacion resultan ser
8
>
<
>
:
p = dF1dq = m!q cotQ
P = �dF1dQ = 1
2
m!q2
sin
2 Q
K = H.
(8.1.5)
Dee stas relaciones despejaremos las variables antiguas q y p. Notese que

CAPITULO 8. TRANSFORMACIONES CANONICAS 224
q =
r
2P
m!sinQ (8.1.6)
y ademas
p = m!
r
2P
m!sinQ
!
cotQ (8.1.7)
p =p2m!P cosQ. (8.1.8)
Ya que la funcion generadora no depende explıcitamente del tiempo, se tieneK = H y por lo tanto para obtener el nuevo Hamiltoniano basta con reemplazarlas antiguas coordenadas en terminos de las nuevas en H. Ası se tiene
K =
⇣p2m!P cosQ
⌘
2
2m+
m!2
2
r
2P
m!sinQ
!
2
(8.1.9)
K =2m!P cos2 Q
2m+
m!2
2
2P
m!sin2 Q (8.1.10)
K = !P cos2 Q+ !P sin2 Q (8.1.11)
K = !P. (8.1.12)
De esta forma, el Hamiltoniano es cıclico en la coordenada Q y por ello elmomentum canonicamente conjugado es constante,
P =K
!=
E
!= constante, (8.1.13)
donde E es el valor de la energia del oscilador.La ecuacion de movimiento para Q es
Q =@K
@P= ! (8.1.14)
e integrando se tiene
Q = !t+ ↵ (8.1.15)
con ↵ una constante de integracion que depende de las condiciones iniciales delproblema.
Finalmente, reemplazando los valores de Q y P se obtiene la solucion delproblema en las coordenadas originales,
q =
s
2�
E!
�
m!sin (!t+ ↵) (8.1.16)

CAPITULO 8. TRANSFORMACIONES CANONICAS 225
q =
r
2E
m!2
sin (!t+ ↵) (8.1.17)
y
p =
s
2m!
✓
E
!
◆
cos (!t+ ↵) (8.1.18)
p =p2mE cos (!t+ ↵) . (8.1.19)
8.2. Diferenciales Exactos y Funciones Genera-doras de Transformaciones Independientesdel Tiempo
8.2.1. Diferenciales Exactos
Considere el conjunto de funciones
f1
=X
k
[pkdqk � PkdQk] (8.2.1)
f2
=X
k
[pkdqk +QkdPk] (8.2.2)
f3
=X
k
[�qkdpk � PkdQk] (8.2.3)
f4
=X
k
[�qkdpk +QkdPk] . (8.2.4)
Es facil mostrar que estas son formas diferenciales exactas en un solo juegode variables. Por ejemplo, para mostrar que f
1
es un diferencial exacto en eljuego de variables qk, pk notese que al considerar las nuvas coordenadas comofuncion de las antiguas, se puede escribir
f1
=X
k
2
4pkdqk � Pk
X
j
✓
@Qk
@qjdqj +
@Qk
@pjdpj
◆
3
5 (8.2.5)
f1
=X
k
2
4
0
@pk �X
j
Pj@Qj
@qk
1
A dqk �X
j
Pj@Qj
@pkdpk
3
5 (8.2.6)
f1
=X
k
[Akdqk +Bkdpk] (8.2.7)
donde se han definido los coeficientes

CAPITULO 8. TRANSFORMACIONES CANONICAS 226
Ak = pk �X
j
Pj@Qj
@qk(8.2.8)
Bk = �X
j
Pj@Qj
@pk. (8.2.9)
De esta forma, para probar que f1
es un diferencial exacto en el juego de variablesqk, pk debemos mostrar que estos coeficientes satisfacen las ecuaciones
@Ak
@qi=
@Ai
@qk(8.2.10)
@Bk
@pi=
@Bi
@pk(8.2.11)
@Ak
@pi=
@Bi
@qk. (8.2.12)
Para comprobar la primera condicion hacemos
@Ak
@qi=
@
@qi
2
4pk �X
j
Pj@Qj
@qk
3
5 = �X
j
@
@qi
Pj@Qj
@qk
�
(8.2.13)
@Ak
@qi= �
X
j
@Pj
@qi
@Qj
@qk�X
j
Pj@2Qj
@qi@qk. (8.2.14)
Sumando y restando el terminoP
j@Q
j
@qi
@Pj
@qk
al lado derecho de esta ecuacionse tiene
@Ak
@qi=X
j
@Qj
@qi
@Pj
@qk�X
j
@Pj
@qi
@Qj
@qk�X
j
Pj@2Qj
@qi@qk�X
j
@Qj
@qi
@Pj
@qk(8.2.15)
@Ak
@qi=X
j
@Qj
@qi
@Pj
@qk� @Pj
@qi
@Qj
@qk
�
�X
j
Pj@2Qj
@qi@qk�X
j
@Qj
@qi
@Pj
@qk. (8.2.16)
El primer termino al lado derecho corresponde al parentesis de Lagrangefundamental de las funciones canonicas qi, pk,
{qi, qk}Q,P =X
j
@Qj
@qi
@Pj
@qk� @Pj
@qi
@Qj
@qk
�
= 0 (8.2.17)
y por lo tanto
@Ak
@qi= �
X
j
Pj@2Qj
@qi@qk�X
j
@Qj
@qi
@Pj
@qk(8.2.18)

CAPITULO 8. TRANSFORMACIONES CANONICAS 227
@Ak
@qi=
@
@qk
2
4�X
j
Pj@Qj
@qi
3
5 (8.2.19)
o incluyendo pi y teniendo en cuenta la independencia de los momentos y lascoordenadas,
@Ak
@qi=
@
@qk
2
4pi �X
j
Pj@Qj
@qi
3
5 (8.2.20)
@Ak
@qi=@Ai
@qk. (8.2.21)
Para comprobar la segunda condicion tenemos un proceso similar,
@Bk
@pi=
@
@pi
2
4�X
j
Pj@Qj
@pk
3
5 = �X
j
@Pj
@pi
@Qj
@pk�X
j
Pj@2Qj
@pi@pk. (8.2.22)
Sumando y restando el terminoP
j@Q
j
@pi
@Pj
@pk
al lado derecho de esta ecuacionse tiene
@Bk
@pi=X
j
@Qj
@pi
@Pj
@pk� @Pj
@pi
@Qj
@pk
�
�X
j
Pj@2Qj
@pi@pk�X
j
@Qj
@pi
@Pj
@pk. (8.2.23)
El primer termino al lado derecho corresponde al parentesis de Lagrangefundamental de las funciones canonicas pi, pk,
{pi, pk}Q,P =X
j
@Qj
@pi
@Pj
@pk� @Pj
@pi
@Qj
@pk
�
= 0 (8.2.24)
y por lo tanto
@Bk
@pi= �
X
j
Pj@2Qj
@pi@pk�X
j
@Qj
@pi
@Pj
@pk. (8.2.25)
@Bk
@pi=
@
@pk
2
4�X
j
Pj@Qj
@pi
3
5 (8.2.26)
@Bk
@pi=@Bi
@pk. (8.2.27)
Finalmente, para comprobar la tercera condicion tenemos

CAPITULO 8. TRANSFORMACIONES CANONICAS 228
@Ak
@pi=
@
@pi
2
4pk �X
j
Pj@Qj
@qk
3
5 =@pk@pi�X
j
@
@pi
Pj@Qj
@qk
�
(8.2.28)
@Ak
@pi= �ki �
X
j
@Pj
@pi
@Qj
@qk�X
j
Pj@2Qj
@pi@qk. (8.2.29)
Sumando y restando el terminoP
j@Q
j
@pi
@Pj
@qk
al lado derecho de esta ecuacionse tiene
@Ak
@pi= �ki +
X
j
@Qj
@pi
@Pj
@qk� @Pj
@pi
@Qj
@qk
�
�X
j
Pj@2Qj
@qi@qk�X
j
@Qj
@pi
@Pj
@qk.
(8.2.30)El primer termino al lado derecho corresponde al parentesis de Lagrange
fundamental de las funciones canonicas pi, qk,
{pi, qk}Q,P =X
j
@Qj
@pi
@Pj
@qk� @Pj
@pi
@Qj
@qk
�
= � {qk, pi}Q,P = ��ki (8.2.31)
y por lo tanto
@Ak
@pi= �ki � �ki �
X
j
Pj@2Qj
@qi@qk�X
j
@Qj
@pi
@Pj
@qk. (8.2.32)
@Ak
@pi=
@
@qk
2
4�X
j
Pj@Qj
@pi
3
5 (8.2.33)
@Ak
@pi=@Bi
@qk. (8.2.34)
De manera completamente analoga se puede demostrar que las funciones f2
,f3
y f4
tambien son diferenciales exactos.
8.2.2. Transformaciones Canonicas y Diferenciales Exac-tos
Si existe una funcion generadora cuyo diferencial sea una forma diferencialexacta, la transformacion obtenida a partir de ella es Canonica. Por ejemplo, sila funcion generadora F
1
(q,Q) es tal que
dF1
(q,Q) = f1
=X
k
[pkdqk � PkdQk] (8.2.35)
entonces la transformacion canonica generada satisface que

CAPITULO 8. TRANSFORMACIONES CANONICAS 229
(
pk = @F1@q
k
Pk = � @F1@Q
k
. (8.2.36)
Si la funcion generadora F2
(q, P ) satisface
dF2
(q, P ) = f2
=X
k
[pkdqk +QkdPk] (8.2.37)
entonces la transformacion canonica cumple
(
pk = @F2@q
k
Qk = @F2@P
k
. (8.2.38)
Si la funcion generadora F3
(p,Q) es tal que
dF3
(p,Q) = f3
=X
k
[�qkdpk � PkdQk] (8.2.39)
entonces la transformacion canonica generada satisface que
(
qk = �@F3@p
k
Pk = � @F3@Q
k
. (8.2.40)
Finalmente, si la funcion generadora F4
(p, P ) cumple que
dF4
(p, P ) = f4
=X
k
[�qkdpk +QkdPk] (8.2.41)
entonces la transformacion canonica generada es tal que
(
qk = �@F4@p
k
Qk = @F4@P
k
. (8.2.42)
EjemploTransformacion IdentidadLa transformacion de identidad se expresa en coordenadas por
(
Q = q
P = p.(8.2.43)
Para encontrar la funcion generadora correspondiente buscaremos una for-ma diferencial exacta. Considerando primero las condiciones para una fun-cion de la forma F
1
(q,Q) dada por las ecuaciones (8.2.36),
(
p = @F1(q,Q)
@q
P = �@F1(q,Q)
@Q
. (8.2.44)

CAPITULO 8. TRANSFORMACIONES CANONICAS 230
Sin embargo, en este caso particular, el lado derecho de las ecuacionesson funciones exclusivamente de q y de Q, mientras que el lado izquierdode la ecuacion son los momentos. Si se intenta integrar cualquiera de estasecuaciones, se obtendrıa una funcion F
1
que dependeria de los momentos, locual no concuerda con nuestra suposicion de dependencia. Por esta razon,NO es posible encontrar una funcion generadora de la forma F
1
(q,Q) parala transformacion identidad.
Considerando ahora las condiciones para una funcion de la formaF2
(q, P ) dada por las ecuaciones (8.2.38), se tiene esta vez
(
p = @F2@q = P
Q = @F2@P = q
(8.2.45)
Esta vez el problema si puede resolverse. Integrando la primera ecuacionse tiene
F2
= Pq + f (P ) (8.2.46)
Derivando este resultado y reemplazando en la segunda ecuacion se tiene
@F2
@P= q +
df
dP= q (8.2.47)
df
dP= 0 =) f = C = constante. (8.2.48)
De esta forma, la funcion generadora de la transformacion identidad es
F2
(q, P ) = qP + C. (8.2.49)
Consideremos las condiciones para una funcion de la forma F3
(p,Q)dada por las ecuaciones (8.2.40). Estas son
(
q = �@F3@p = Q
P = �@F3@Q = p
(8.2.50)
las cuales si pueden ser integradas. De la primera ecuacion se obtiene
F3
= �Qp+ f (Q) . (8.2.51)
Reemplazando en la segunda ecuacion se obtiene
�@F3
@Q= p+
df
dQ= p (8.2.52)
df
dQ= 0 =) f = C = constante. (8.2.53)

CAPITULO 8. TRANSFORMACIONES CANONICAS 231
De esta manera, la funcion generadora es
F3
(p,Q) = �Qp+ C. (8.2.54)
Finalmente, las condiciones para una funcion de la forma F4
(p, P ) dadapor las ecuaciones (8.2.42), resultan ser
(
q = �@F4(p,P )
@p
Q = @F4(p,P )
@P
. (8.2.55)
Sin embargo, al igual que en el caso de la funcion F1
, la dependenciade los lados derecho e izquierdo de estas ecuaciones no permite la integra-cion. Por esta razon concluimos que NO es posible encontrar una funciongeneradora de la forma F
4
(p, P ) para la transformacion identidad.
EjemploTransformacion de IntercambioLa transformacion de intercambio se expresa en coordenadas por
(
Q = p
P = �q. (8.2.56)
Analizaremos las condiciones para una funcion de la forma F1
(q,Q),dadas por las ecuaciones (8.2.36). Estas se escriben
(
p = @F1(q,Q)
@q = Q
P = �@F1(q,Q)
@Q = �q . (8.2.57)
Integrando la primera ecuacion se obtiene la funcion
F1
= Qq + f (Q) (8.2.58)
y reemplazando en la segunda condicion se tiene
�@F1
(q,Q)
@Q= �q + df
dQ= �q
df
dQ= 0 =) f = C = constante.
Por lo tanto la funcion generadora de la trabsformacion de intercambiosera
F1
(q,Q) = Qq + C. (8.2.59)
CAPITULO 8. TRANSFORMACIONES CANONICAS 232
EjemploProbar que
8
>
>
>
<
>
>
>
:
q1
= Q1
cosQ2
q2
= Q1
sinQ2
p1
= P1
cosQ2
� P2Q1
sinQ2
p2
= P1
sinQ2
+ P2Q1
cosQ2
(8.2.60)
es una transformacion canonica.Para mostrar que esta es una transformacion canonica, encontraremos
una funcion generadora a partir de una forma diferencial exacta. Antesde comenzar, de las ecuaciones de transformacion para p
1
y p2
se puedendespejar los valores de P
1
y P2
como
P1
= p1
cosQ2
+ p2
sinQ2
(8.2.61)
P2
= �p1
Q1
sinQ2
+ p2
Q1
cosQ2
. (8.2.62)
Analizaremos las condiciones para una funcion de la formaF3
(p1
, p2
, Q1
, Q2
), dadas por las ecuaciones (8.2.40),
(
qk = �@F3@p
k
Pk = � @F3@Q
k
. (8.2.63)
Para esta transformacion particular, estas condiciones corresponden alas cuatro ecuaciones diferenciales
q1
= �@F3
@p1
= Q1
cosQ2
(8.2.64)
q2
= �@F3
@p2
= Q1
sinQ2
(8.2.65)
P1
= � @F3
@Q1
= p1
cosQ2
+ p2
sinQ2
(8.2.66)
P2
= � @F3
@Q2
= �p1
Q1
sinQ2
+ p2
Q1
cosQ2
. (8.2.67)
Integrando la primera ecuacion se obtiene
F3
= �p1
Q1
cosQ2
+ f (p2
, Q1
, Q2
) . (8.2.68)
Al reemplazar en la segunda ecuacion se obtiene
�@F3
@p2
= � @f
@p2
= Q1
sinQ2
(8.2.69)

CAPITULO 8. TRANSFORMACIONES CANONICAS 233
que se puede integrar para obtener
f = �p2
Q1
sinQ2
+ g (Q1
, Q2
) (8.2.70)
y con ello la funcion generadora sera
F3
= �p1
Q1
cosQ2
� p2
Q1
sinQ2
+ g (Q1
, Q2
) . (8.2.71)
Derivando y reemplazando en la terera ecuacion diferencial se tiene
� @F3
@Q1
= p1
cosQ2
+ p2
sinQ2
� @g
@Q1
= p1
cosQ2
+ p2
sinQ2
(8.2.72)
@g
@Q1
= 0 =) g = g (Q2
) . (8.2.73)
Por lo tanto la funcion generadora es
F3
= �p1
Q1
cosQ2
� p2
Q1
sinQ2
+ g (Q2
) . (8.2.74)
Finalmente, de la cuarta ecuacion diferencial se tiene la condicion
� @F3
@Q2
= �p1
Q1
sinQ2
+ p2
Q1
cosQ2
+dg
dQ2
= �p1
Q1
sinQ2
+ p2
Q1
cosQ2
(8.2.75)
dg
dQ2
= 0 =) g = C = constante. (8.2.76)
Con ello concluimos que la funcion generadora de la transformacioncanonica es
F3
(p1
, p2
, Q1
, Q2
) = �p1
Q1
cosQ2
� p2
Q1
sinQ2
+ C. (8.2.77)
EjemploProbar que
(
Q = ln⇥
1 +pq cos p
⇤
P = 2⇥
1 +pq cos p
⇤pq sin p
(8.2.78)
es una transformacion canonica.Para mostrar que esta es una transformacion canonica, encontraremos
una funcion generadora a partir de una forma diferencial exacta. Antes de

CAPITULO 8. TRANSFORMACIONES CANONICAS 234
comenzar, de la primera ecuacion de transformacion se pueden despejar
q =
�
eQ � 1�
2
cos2 p(8.2.79)
y por lo tanto
P = 2eQ�
eQ � 1�
cos psin p = 2eQ
�
eQ � 1�
tan p (8.2.80)
Analizaremos las condiciones para una funcion de la forma F3
(p,Q),dadas por las ecuaciones (8.2.40),
8
<
:
q = �@F3@p =
(eQ�1)2
cos
2 p
P = �@F3@Q = 2eQ
�
eQ � 1�
tan p. (8.2.81)
Integrando la primera ecuacion se obtiene
F3
= �ˆ �
eQ � 1�
2
cos2 pdp = � �eQ � 1
�
2
ˆsec2 pdp (8.2.82)
F3
= � �eQ � 1�
2
tan p+ f (Q) . (8.2.83)
Al derivar y reemplazar en la segunda ecuacion se obtiene
�@F3
@Q= 2
�
eQ � 1�
eQ tan p+df
dQ= 2eQ
�
eQ � 1�
tan p (8.2.84)
de donde
@f
@Q= 0 =) f = C = constante. (8.2.85)
Por lo tanto la funcion generadora de la transformacion canonica es
F3
= � �eQ � 1�
2
tan p+ C. (8.2.86)
8.3. Transformaciones Canonicas en Forma Ma-tricial
8.3.1. Algunas Relaciones Matematicas
Considere la matriz

CAPITULO 8. TRANSFORMACIONES CANONICAS 235
E =
✓
0 1n
�1n 0
◆
(8.3.1)
donde 1n es la matriz identidad en n-dimensiones. La transpuesta de esta matrizes
E =
✓
0 �1n
1n 0
◆
= �E, (8.3.2)
mientras que su cuadrado resulta ser
E2 = �1. (8.3.3)
De esta relacion concluimos que
E = �E�1 = �E. (8.3.4)
Por otro lado, de la definicion de inversa se tiene que
EE�1 = EE = 1 (8.3.5)
y tomando el detemrinante de la ultima igualdad obtenemos�
�
�
EE�
�
�
= kEk�
�
�
E�
�
�
= k1k = 1. (8.3.6)
Ya que el determinante de la transpuesta de una matriz es igual al determi-nante de la matriz esta relacion sera
kEk kEk = kEk2 = 1 (8.3.7)
kEk = 1. (8.3.8)
Considere ahora una matriz cuadrada A de tamano 2n⇥ 2n. Si A satisfacela condicion
AEA = E (8.3.9)
se dice que esta es una matriz simplectica. A partir de esta relacion se obtienenalgunas de las propiedades de las matrices simplecticas. Por ejemplo, tomandoel determinante de esta relacion se tiene
�
�
�
AEA�
�
�
= kEk (8.3.10)�
�
�
A�
�
�
kEk kAk = 1 (8.3.11)
�
�
�
A�
�
�
kAk = 1 (8.3.12)
kAk2 = 1 (8.3.13)

CAPITULO 8. TRANSFORMACIONES CANONICAS 236
kAk = ±1. (8.3.14)
Por otra parte,
AEA = E (8.3.15)
EAEA = E2 = �1 (8.3.16)
⇣
EAE⌘
A = �1 (8.3.17)
de donde concluimos que la inversa de una matriz simplectica es
A�1 = �EAE. (8.3.18)
Ademas, se tiene que
AEA = E (8.3.19)
A�1AEAA�1 = A�1EA�1 (8.3.20)
E = A�1EA�1 (8.3.21)
o tomando inversos y recordando que E�1 = �E,
E�1 =⇣
A�1EA�1
⌘�1
(8.3.22)
E�1 = ˜AE�1A (8.3.23)
�E = A (�E) A (8.3.24)
E = AEA. (8.3.25)
Finalmente, notese que la matriz E es en sı misma simplectica ya que
EEE = E. (8.3.26)

CAPITULO 8. TRANSFORMACIONES CANONICAS 237
8.3.2. Transformaciones de Coordenadas
Considere la transformacion
Qi = Qi (q1, ..., qn, p1, ..., pn, t) (8.3.27)
Pi = Pi (q1, ..., qn, p1, ..., pn, t) con i = 1, ..., n. (8.3.28)
Introducimos las cantidades
⌘i = qi (8.3.29)
⌘i+n = pi (8.3.30)
y
⇠i = Qi (8.3.31)
⇠i+n = Pi. (8.3.32)
De esta forma, la transformacion de coordenadas se puede escribir como
⇠µ = ⇠µ (⌘1, ..., ⌘2n, t) con µ = 1, ..., 2n. (8.3.33)
Se define la matriz de transformacion
J =
0
B
B
@
@⇠1@⌘1
. . . @⇠1@⌘2n
.... . .
...@⇠2n@⌘1
· · · @⇠2n@⌘2n
1
C
C
A
(8.3.34)
o en componentes
Jµ⌫ =@⇠µ@⌘⌫
. (8.3.35)
El Jacobiano es el determinante de esta matriz de transformacion, y si secumple que kJ k 6= 0 entonces es posible encontrar la transformacion inversa
⌘⌫ = ⌘⌫ (⇠1, ..., ⇠2n) con ⌫ = 1, ..., 2n. (8.3.36)
La matriz J contiene toda la informacion de la transformacion. En parti-cular, se establece que una transformacion es canonica sii J es simplectica, esdecir si satisface
JEJ = E. (8.3.37)
Esta afirmacion tiene diferentes consecuencias, como por ejemplo

CAPITULO 8. TRANSFORMACIONES CANONICAS 238
1. La inversa de una transformacion canonica es tambien una transformacioncanonica.
2. La transformacion identidad es canonica. Para mostrarlo definimos J = 1y con ello es claro que
JEJ = 1E1 = E. (8.3.38)
De acuerdo con esta definicion, los elementos de J diferentes de cero sonunicamente los de la diagonal,
Jµµ =@⇠µ@⌘µ
= 1 (8.3.39)
que corresponden a
@Q1
@q1
=@Q
2
@q2
= ... =@Qn
@qn= 1 (8.3.40)
y
@P1
@p1
=@P
2
@p2
= ... =@Pn
@pn= 1. (8.3.41)
Esto quiere decir que la transformacion que se describe con esta matriz es
(
Qj = qjPj = pj .
(8.3.42)
3. La composicion de dos transformaciones canonicas es una transformacioncanonica. Para mostrar esto considere las transformaciones descritas por lasmatrices simplecticas J
1
y J2
, que satisfacen
J1
EJ1
= E (8.3.43)
J2
EJ2
= E. (8.3.44)
De esta forma, tomando la segunda relacion y multiplicando por J1
y sutranspuesta, obtenemos
J1
J2
EJ2
J1
= J1
EJ1
(8.3.45)
⇣
J1
J2
⌘
E (J2
J1
) = E. (8.3.46)
4. Las transformaciones canonicas se componen de forma asociativa y porello forman un Grupo.

CAPITULO 8. TRANSFORMACIONES CANONICAS 239
8.3.3. Invariantes
Las transformaciones canonicas dejan algunas cantidades invariantes, lascuales adquieren importancia por este hecho. Aqui se analizaran algunas deestas cantidades.
8.3.3.1. Ecuaciones de Hamilton (Transformaciones Independientesdel Tiempo)
En las coordenadas originales ⌘, las ecuaciones de Hamilton se escriben ennotacion vectorial en la forma
⌘ = E@H
@⌘. (8.3.47)
Consideremos ahora una transformacion de coordenadas representada por
⇠ = ⇠ (⌘) . (8.3.48)
De esta relacion se tiene que
⇠µ =@⇠µ@⌘
1
⌘1
+@⇠µ@⌘
2
⌘2
+ ...+@⇠µ@⌘
2n⌘2n (8.3.49)
⇠µ =X
⌫
@⇠µ@⌘⌫
⌘⌫ (8.3.50)
o introduciendo la matriz de transformacion,
⇠ = J ⌘. (8.3.51)
Si kJ k 6= 0 se puede calcular la matriz inversa
J�1 =
0
B
B
@
@⌘1@⇠1
. . . @⌘1@⇠2n
.... . .
...@⌘2n@⇠1
· · · @⌘2n@⇠2n
1
C
C
A
(8.3.52)
o en componentes
Jµ⌫ =@⌘µ@⇠⌫
, (8.3.53)
y por lo tanto la transformacion inversa
⌘ = ⌘ (⇠) . (8.3.54)
Con ello se puede invertir la relacion de la derivada temporal para obtener
⌘ = J�1⇠. (8.3.55)

CAPITULO 8. TRANSFORMACIONES CANONICAS 240
Ahora bien, consideraremos la funcion Hamiltoniana en el nuevo sistema decoordenadas H, la cual se obtiene a partir del Hamiltoniano original H mediante
H (⇠) = H [⌘ (⇠)] . (8.3.56)
Derivando se obtiene
@H
@⇠µ=X
⌫
@H
⌘⌫
@⌘⌫@⇠µ
(8.3.57)
@H
@⇠µ=@H
@⌘1
@⌘1
@⇠µ+@H
@⌘2
@⌘2
@⇠µ+ ...+
@H
@⌘2n
@⌘2n
@⇠µ. (8.3.58)
Los elementos matriciales que a aparecen en esta expresion corresponden ala transpuesta de la inversa de la matriz de transformacion, y por ello la relacionmatricial correspondiente resulta ser
@H
@⇠= J�1
@H
@⌘(8.3.59)
o equivalentemente
@H
@⌘= J @H
@⇠. (8.3.60)
Reemplazando las ecuaciones de transformacion (8.3.55) y (8.3.60) en laecuacion de Hamilton (8.3.47) se obtiene
J�1⇠ = EJ @H
@⇠(8.3.61)
⇠ =⇣
JEJ⌘ @H
@⇠, (8.3.62)
y si la transformacion es canonica (i.e. que J es simplectica) esta expresion sereduce a
⇠ = E@H
@⇠, (8.3.63)
lo cual muestra que en efecto las ecuaciones de Hamilton son invariantes bajotransformaciones canonicas.
8.3.3.2. Corchetes de Poisson
Dadas las funciones
u = u (q, p, t) (8.3.64)
v = v (q, p, t) (8.3.65)

CAPITULO 8. TRANSFORMACIONES CANONICAS 241
su corchete de Poisson en forma matricial se escribira
[u, v]⌘ =g@u
@⌘E@v
@⌘. (8.3.66)
Si se realiza una transformacion canonica representada por la ecuacion ⇠ =⇠ (⌘, t)se tendra
@u
@⌘µ=X
⌫
@u
@⇠⌫
@⇠⌫@⌘µ
(8.3.67)
@u
@⌘µ=
@u
@⇠1
@⇠1
@⌘µ+@u
@⇠2
@⇠2
@⌘µ+ ...+
@u
@⇠2n
@⇠2n
@⌘µ. (8.3.68)
En forma matricial esta ecuacion se escribe
@u
@⌘= J @u
@⇠(8.3.69)
y al tomar la transpuesta de esta ecuacion obtenemos
g@u
@⌘=g@u
@⇠J . (8.3.70)
De la misma forma, es inmediato obtener que
@v
@⌘= J @v
@⇠. (8.3.71)
Reemplazando estas expresiones en el corchete de Poisson obtenemos
[u, v]⇠ =g@u
@⇠JEJ @v
@⇠(8.3.72)
y ya que la transformacion es canonica se tiene
[u, v]⇠ =g@u
@⇠E@v
@⇠, (8.3.73)
lo cual muestra que los corchetes de Poisson son invariantes bajo estas transfor-maciones.
8.3.3.3. Parentesis de Lagrange
Los parentesis de Lagrange son invariantes canonicos. La prueba se realiza deforma completamente analoga a la demostracion para los corchetes de Poisson.

CAPITULO 8. TRANSFORMACIONES CANONICAS 242
8.3.3.4. Integrales de Movimiento de Poincare
Considere el conjunto de coordenadas
⌘ = (q1
, q2
, ..., qn, p1, p2, ..., pn) . (8.3.74)
las cuales definen el elemento de medida en el espacio de fase
d⌘ = dq1
...dqndp1...dpn. (8.3.75)
Bajo una transformacion canonica de la forma ⇠ = ⇠ (⌘) el nuevo elementode medida sera
d⇠ = dQ1
...dQndP1
...dPn, (8.3.76)
y la relacion entre los dos elementos se da atraves del jacobiano de la transfor-macion,
d⇠ = kJ k d⌘. (8.3.77)
Para las transofrmaciones canonicas (i.e. J simplectica) se tiene kJ k = ±1 ypor ello el elemento de medida es un invariante,
d⇠ = d⌘. (8.3.78)
Esta expresion corresponde a una reescritura del teorema de Liouville.
8.3.3.5. Ecuaciones de Hamilton (Transformaciones Dependientesdel Tiempo)
En las coordenadas originales, ⌘, las ecuaciones de Hamilton se escriben
⌘ = E@H
@⌘. (8.3.79)
Consideremos ahora una transformacion de coordenadas dependiente deltiempo, representada por
⇠ = ⇠ (⌘, t) . (8.3.80)
Si la matriz de transformacion tienekJ k 6= 0, se puede calcular la transformacioninversa
⌘ = ⌘ (⇠, t) . (8.3.81)
Derivando con respecto al tiempo se tiene
⇠ =@⌘
@⇠⌘ +
@⌘
@t(8.3.82)
o en terminos de la matriz de transformacion,

CAPITULO 8. TRANSFORMACIONES CANONICAS 243
⇠ = J�1⌘ +@⌘
@t(8.3.83)
La funcion Hamiltoniana en el nuevo sistema de coordenadas H se obtienea partir del Hamiltoniano original H mediante la relacion
H (⇠, t) = H [⌘ (⇠, t) , t] . (8.3.84)
Derivando se obtiene
@H
@⇠µ=X
⌫
@H
⌘⌫
@⌘⌫@⇠µ
(8.3.85)
@H
@⇠µ=@H
@⌘1
@⌘1
@⇠µ+@H
@⌘2
@⌘2
@⇠µ+ ...+
@H
@⌘2n
@⌘2n
@⇠µ. (8.3.86)
Los elementos matriciales que a aparecen en esta expresion corresponden ala transpuesta de la inversa de la matriz de transformacion, y por ello la relacionmatricial correspondiente resulta ser
@H
@⇠= J�1
@H
@⌘(8.3.87)
o equivalentemente
@H
@⌘= J @H
@⇠. (8.3.88)
Reemplazando las ecuaciones de transformacion (8.3.83) y (8.3.88) en laecuacion de Hamilton (8.3.79) se obtiene
J�1⇠ +@⌘
@t= EJ @H
@⇠(8.3.89)
⇠ =⇣
JEJ⌘ @H
@⇠� J @⌘
@t(8.3.90)
⇠ =⇣
JEJ⌘
@H
@⇠�⇣
JEJ⌘�1
J @⌘
@t
�
(8.3.91)
y ya que asumimos que la transformacion es canonica (i.e. que J es simplectica)esta expresion se reduce a
⇠ = E
@H
@⇠�⇣
JEJ⌘�1
J @⌘
@t
�
(8.3.92)
⇠ = E
@H
@⇠� J�1E�1J�1J @⌘
@t
�
(8.3.93)
⇠ = E
@H
@⇠� J�1E�1
@⌘
@t
�
. (8.3.94)

CAPITULO 8. TRANSFORMACIONES CANONICAS 244
Ya que E�1 = �E esta expresion se reduce a
⇠ = E
@H
@⇠+ J�1E
@⌘
@t
�
. (8.3.95)
De esta expresion podemos concluir que las ecuaciones de Hamilton soninvariantes bajo transformaciones canonicas dependientes del tiempo si existeuna funcion = (⇠, t) tal que
@
@⇠= J�1E
@⌘
@t, (8.3.96)
ya que de tenerse esta funcion, las ecuaciones de Hamilton se escribiran en laforma
⇠ = E
@H
@⇠+@
@⇠
�
(8.3.97)
⇠ = E@
@⇠
⇥
H+ ⇤
(8.3.98)
⇠ = E@K
@⇠(8.3.99)
donde el nuevo Hamiltoniano es
K = H + . (8.3.100)
Exitencia de la funcion Notese que el termino que define la funcion depende de la matriz J�1 cuyas componentes son
J�1 =
0
B
B
@
@⌘1@⇠1
. . . @⌘1@⇠1
.... . .
...@⌘2n@⇠2n
· · · @⌘2n@⇠2n
1
C
C
A
=f@⌘
@⇠. (8.3.101)
Por lo tanto se tiene que
J�1E@⌘
@t=
f@⌘
@⇠E@⌘
@t= {⇠, t}⌘,⌘ (8.3.102)
donde se ha utilizado la ecuacion (7.10.4) para identificar el parentesis de La-grange de las funciones ⇠ y t. Ası, la ecuacion que define la funcion (8.3.96)se convierte en
@
@⇠= {⇠, t}⌘,⌘ (8.3.103)
o en componentes,
@
@⇠µ= {⇠µ, t} . (8.3.104)

CAPITULO 8. TRANSFORMACIONES CANONICAS 245
Esta expresion es equivalente a
d = {⇠1
, t} d⇠1
+ {⇠2
, t} d⇠2
+ ...+ {⇠2n, t} d⇠2n + {t, t} dt (8.3.105)
pero ya que {t, t} = 0 esta expresion se reduce a
d = {⇠1
, t} d⇠1
+ {⇠2
, t} d⇠2
+ ...+ {⇠2n, t} d⇠2n. (8.3.106)
De esta expresion es claro que la funcion existe si se cumplen las condicionesdel diferencial exacto
@ {⇠µ, t}@⇠⌫
=@ {⇠⌫ , t}@⇠µ
. (8.3.107)
Para probar que estas condiciones se satisfacen y por lo tanto si existe,utilizamos la definicion del parentesis de Lagrange,
{⇠µ, t} =X
�
@q�@⇠µ
@p�@t� @p�@⇠µ
@q�@t
�
. (8.3.108)
Derivando se tiene
@ {⇠µ, t}@⇠⌫
=X
�
@
@⇠⌫
✓
@q�@⇠µ
@p�@t
◆
� @
@⇠⌫
✓
@p�@⇠µ
@q�@t
◆�
(8.3.109)
@ {⇠µ
, t}@⇠⌫
=X
�
@
@⇠⌫
✓@q�
@⇠µ
◆@p�
@t+
@q�
@⇠µ
@
@⇠⌫
✓@p�
@t
◆�
@
@⇠⌫
✓@p�
@⇠µ
◆@q�
@t�
@p�
@⇠µ
@
@⇠⌫
✓@q�
@t
◆�
@ {⇠µ
, t}@⇠⌫
=X
�
@
@⇠µ
✓@q�
@⇠⌫
◆@p�
@t�
@
@⇠µ
✓@p�
@⇠⌫
◆@q�
@t+
@q�
@⇠µ
@
@t
✓@p�
@⇠⌫
◆�
@p�
@⇠µ
@
@t
✓@q�
@⇠⌫
◆�.
Sumando y restando los terminos @q�
@⇠⌫
@@⇠
µ
⇣
@p�
@t
⌘
� @p�
@⇠⌫
@@⇠
µ
⇣
@q�
@t
⌘
esta expre-
sion se puede reescribir como
@ {⇠µ
, t}@⇠⌫
=X
�
@
@⇠µ
✓@q�
@⇠⌫
◆@p�
@t+
@q�
@⇠⌫
@
@⇠µ
✓@p�
@t
◆�
@
@⇠µ
✓@p�
@⇠⌫
◆@q�
@t�
@p�
@⇠⌫
@
@⇠µ
✓@q�
@t
◆
�@q�
@⇠⌫
@
@⇠µ
✓@p�
@t
◆+
@p�
@⇠⌫
@
@⇠µ
✓@q�
@t
◆+
@q�
@⇠µ
@
@t
✓@p�
@⇠⌫
◆�
@p�
@⇠µ
@
@t
✓@q�
@⇠⌫
◆�
@ {⇠µ
, t}@⇠⌫
=X
�
@
@⇠µ
✓@q�
@⇠⌫
@p�
@t
◆�
@
@⇠µ
✓@p�
@⇠⌫
@q�
@t
◆
�@q�
@⇠⌫
@
@t
✓@p�
@⇠µ
◆+
@p�
@⇠⌫
@
@t
✓@q�
@⇠µ
◆+
@q�
@⇠µ
@
@t
✓@p�
@⇠⌫
◆�
@p�
@⇠µ
@
@t
✓@q�
@⇠⌫
◆�
@ {⇠µ, t}@⇠⌫
=X
�
@
@⇠µ
✓
@q�@⇠⌫
@p�@t
◆
� @
@⇠µ
✓
@p�@⇠⌫
@q�@t
◆
+@
@t
✓
@q�@⇠µ
@p�@⇠⌫
◆
� @
@t
✓
@p�@⇠µ
@q�@⇠⌫
◆�
(8.3.110)

CAPITULO 8. TRANSFORMACIONES CANONICAS 246
@ {⇠µ, t}@⇠⌫
=@
@⇠µ
X
�
@q�@⇠⌫
@p�@t� @p�@⇠⌫
@q�@t
�
+@
@t
X
�
@q�@⇠µ
@p�@⇠⌫� @p�@⇠µ
@q�@⇠⌫
�
. (8.3.111)
Identificando los parentesis de Lagrange correspondientes se tiene
@ {⇠µ, t}@⇠⌫
=@ {⇠v, t}@⇠µ
+@ {⇠µ, ⇠⌫}
@t(8.3.112)
y ya que el parentesis fundamental se anula, {⇠µ, ⇠⌫} = 0, se obtiene la relacionbuscada
@ {⇠µ, t}@⇠⌫
=@ {⇠v, t}@⇠µ
, (8.3.113)
la cual asegura la existencia de la funcion y por lo tanto asegura que lasecuaciones de Hamilton son invariantes bajo transformaciones canonicas depen-dientes del tiempo.
8.4. Diferenciales Exactos y Funciones Genera-doras de Transformaciones Dependientes delTiempo
8.4.1. Diferenciales Exactos
Considere el conjunto de funciones
f1
=X
k
[pkdqk � PkdQk] + dt (8.4.1)
f2
=X
k
[pkdqk +QkdPk] + dt (8.4.2)
f3
=X
k
[�qkdpk � PkdQk] + dt (8.4.3)
f4
=X
k
[�qkdpk +QkdPk] + dt. (8.4.4)
Mostraremos ahora que estas son formas diferenciales exactas en un solojuego de variables. Para mostrar que f
1
es un diferencial exacto en el juegode variables Qk, Pk notese que al considerar la transformacion de coordenadasdependiente del tiempo

CAPITULO 8. TRANSFORMACIONES CANONICAS 247
(
qk = qk (Qj , Pj , t)
pk = pk (Qj , Pj , t)(8.4.5)
se puede escribir
f1
=X
k
2
4pk
8
<
:
X
j
✓
@qk@Qj
dQj +@qk@Pj
dPj
◆
+@qk@t
dt
9
=
;
� PkdQk
3
5+ dt (8.4.6)
f1
=X
j
"
X
k
pk@qk@Qj
� Pj
#
dQj +X
j
"
X
k
pk@qk@Pj
#
dPj +
"
X
k
pk@qk@t
+
#
dt
(8.4.7)
f1
=X
j
AjdQj +X
j
BjdPj + Cdt (8.4.8)
donde se han definido los coeficientes
Aj =X
k
pk@qk@Qj
� Pj (8.4.9)
Bj =X
k
pk@qk@Pj
(8.4.10)
C =X
k
pk@qk@t
+ . (8.4.11)
De esta forma, para probar que f1
es un diferencial exacto en el juego de variablesQk, Pk debemos mostrar que estos coeficientes satisfacen las ecuaciones
@Ai
@Qk=
@Ak
@Qi(8.4.12)
@Bi
@Pk=
@Bk
@Pi(8.4.13)
@Ai
@Pk=
@Bk
@Qi(8.4.14)
@Ai
@t=
@C
@Qi(8.4.15)
@Bi
@t=
@C
@Pi. (8.4.16)
Las tres primeras condiciones se comprueban de forma analoga a la reali-zada para las transformaciones independientes del tiempo. Por esta razon nos

CAPITULO 8. TRANSFORMACIONES CANONICAS 248
concentraremos unicamente en las dos ultimas condiciones. Para comprobar lacondicion (8.4.15) se toma
@Ai
@t=
@
@t
"
X
k
pk@qk@Qj
� Pj
#
=X
k
@
@t
pk@qk@Qj
�
(8.4.17)
donde se ha considerado que las coordenadas Pj y t son independientes. Conello se logra
@Ai
@t=X
k
@pk@t
@qk@Qj
+ pk@2qk@t@Qj
�
. (8.4.18)
Sumando y restando el terminoP
j@q
k
@t@p
k
@Qj
al lado derecho de esta ecuacionse tiene
@Ai
@t=X
k
@pk@t
@qk@Qj
� @qk@t
@pk@Qj
�
+X
k
@qk@t
@pk@Qj
+ pk@2qk@t@Qj
�
(8.4.19)
@Ai
@t=X
k
@pk@t
@qk@Qj
� @qk@t
@pk@Qj
�
+@
@Qj
X
k
pk@qk@t
�
. (8.4.20)
El primer termino del lado derecho corresponde al parentesis de Lagrangede las funciones Qj y t,
{Qj , t}q,p =X
k
@qk@Qj
@pk@t� @pk@Qj
@qk@t
�
, (8.4.21)
el cual, de acuerdo con la ecuacion (8.3.104) resulta ser
{Qj , t}q,p =@
@Qj, (8.4.22)
y con ello se tiene
@Ai
@t=
@
@Qj+
@
@Qj
X
k
pk@qk@t
�
(8.4.23)
@Ai
@t=
@
@Qj
"
X
k
pk@qk@t
+
#
(8.4.24)
@Ai
@t=
@C
@Qj, (8.4.25)
como se queria mostrar. Finalmente, para comprobar la condicion (8.4.16) te-nemos un proceso similar,
@Bj
@t=
@
@t
"
X
k
pk@qk@Pj
#
=X
k
@pk@t
@qk@Pj
+X
k
pk@2qk@t@Pj
. (8.4.26)

CAPITULO 8. TRANSFORMACIONES CANONICAS 249
Sumando y restando el terminoP
k@q
k
@t@p
k
@Pj
al lado derecho de esta ecuacionse tiene
@Bj
@t=X
k
@pk@t
@qk@Pj� @qk
@t
@pk@Pj
�
+X
k
@qk@t
@pk@Pj
+ pk@2qk@t@Pj
�
(8.4.27)
@Bj
@t=X
k
@pk@t
@qk@Pj� @qk
@t
@pk@Pj
�
+@
@t
X
k
qk@pk@Pj
�
. (8.4.28)
El primer termino al lado derecho corresponde al parentesis de Lagrange delas funciones canonicas Pj y t,
{Pj , t}q,p =X
k
@qk@Pj
@pk@t� @pk@Pj
@qk@t
�
=@
@Pj(8.4.29)
donde se hautilizado de nuevo la ecuacion (8.3.104). Por lo tanto
@Bj
@t=
@
@Pj+@
@t
X
k
qk@pk@Pj
�
(8.4.30)
@Bj
@t=
@
@t
"
X
k
qk@pk@Pj
+
#
(8.4.31)
@Bj
@t=@C
@t. (8.4.32)
De manera completamente analoga se puede demostrar que las funciones f2
,f3
y f4
tambien son diferenciales exactos.
8.4.2. Transformaciones Canonicas y Diferenciales Exac-tos con Dependencia Temporal
Si existe una funcion generadora cuyo diferencial sea una forma diferencialexacta, incluso con dependencia temporal, la transformacion obtenida a partirde ella es Canonica. Por ejemplo, si la funcion generadora F
1
(q,Q, t) es tal que
dF1
(q,Q, t) = f1
=X
k
[pkdqk � PkdQk] + dt (8.4.33)
entonces la transformacion canonica generada satisface que
8
>
<
>
:
pk = @F1@q
k
Pk = � @F1@Q
k
= @F1@t
. (8.4.34)
Si la funcion generadora F2
(q, P, t) satisface

CAPITULO 8. TRANSFORMACIONES CANONICAS 250
dF2
(q, P, t) = f2
=X
k
[pkdqk +QkdPk] + dt (8.4.35)
entonces la transformacion canonica cumple
8
>
<
>
:
pk = @F2@q
k
Qk = @F2@P
k
= @F2@t
. (8.4.36)
Si la funcion generadora F3
(p,Q, t) es tal que
dF3
(p,Q, t) = f3
=X
k
[�qkdpk � PkdQk] + dt (8.4.37)
entonces la transformacion canonica generada satisface que
8
>
<
>
:
qk = �@F3@p
k
Pk = � @F3@Q
k
= @F3@t
. (8.4.38)
Finalmente, si la funcion generadora F4
(p, P, t) cumple que
dF4
(p, P, t) = f4
=X
k
[�qkdpk +QkdPk] + dt (8.4.39)
entonces la transformacion canonica generada es tal que
8
>
<
>
:
qk = �@F4@p
k
Qk = @F4@P
k
= @F4@t
. (8.4.40)
EjemploConsidere el Hamiltoniano
H = p1
p2
sin (!t+ ↵1
q1
� ↵2
q2
) (8.4.41)
donde !,↵1
y ↵2
son constantes. Muestre que las ecuaciones
8
>
>
>
<
>
>
>
:
Q1
= q1
Q2
= q2
� !t↵2
P1
= p1
P2
= p2
(8.4.42)
representan una transformacion canonica y encuentre el Hamiltoniano enel nuevo sistema de coordenadas, K (Q
1
, Q2
, P1
, P2
, t).

CAPITULO 8. TRANSFORMACIONES CANONICAS 251
Para mostrar que la transformacion es canonica, encontraremos su fun-cion generadora. Considerando las condiciones para una transformacion dela forma F
2
(q1
, q2
, P1
, P2
, t) dadas por las ecuaciones (8.4.36),
8
>
<
>
:
pk = @F2@q
k
Qk = @F2@P
k
= @F2@t
, (8.4.43)
se escriben ene ste caso como
8
>
>
>
>
>
>
<
>
>
>
>
>
>
:
p1
= @F2@q1
= P1
p2
= @F2@q2
= P2
Q1
= @F2@P1
= q1
Q2
= @F2@P2
= q2
� !t↵2
= @F2@t .
(8.4.44)
Integrando la primera relacion se tiene
F2
= P1
q1
+ f (q2
, P1
, P2
) . (8.4.45)
Reemplazando en la segunda ecuacion diferencial obtenemos
@F2
@q2
=@f
@q2
= P2
=) f = P2
q2
+ g (P1
, P2
) (8.4.46)
y por lo tanto la funcion generadora sera
F2
= P1
q1
+ P2
q2
+ g (P1
, P2
) . (8.4.47)
Derivando y reeemplazando en la tercera ecuacion diferencial se obtienela condicion
@F2
@P1
= q1
+@g
@P1
= q1
(8.4.48)
@g
@P1
= 0 =) g = g (P2
) (8.4.49)
y con ello
F2
= P1
q1
+ P2
q2
+ g (P2
) . (8.4.50)
Derivando nuevamente y reemplazando en la cuarta ecuacion diferencialse tiene
@F2
@P2
= q2
+dg
dP2
= q2
� !t
↵2
(8.4.51)

CAPITULO 8. TRANSFORMACIONES CANONICAS 252
dg
dP2
= �!t↵2
=) g = �!t↵2
P2
+ h (t) . (8.4.52)
Asi, la funcion generadora sera
F2
(q1
, q2
, P1
, P2
, t) = P1
q1
+ P2
q2
� !t
↵2
P2
+ h (t) . (8.4.53)
Para finalizar, la funcion se obtiene a partir de la ultima ecuaciondiferencial,
=@F
2
@t= � !
↵2
P2
+dh
dt. (8.4.54)
Ya que esta funcion generadora satisface las condiciones de diferencialexacto, concluimos que la transformacion es canonica.
Para obtener el nuevo Hamiltoniano, simplemente utilizamos la ecuacion(8.3.100),
K = H + . (8.4.55)
El primer termino es
H = P1
P2
sin
!t+ ↵1
Q1
� ↵2
✓
Q2
+!t
↵2
◆�
(8.4.56)
H = P1
P2
sin [↵1
Q1
� ↵2
Q2
] (8.4.57)
por lo cual
K = P1
P2
sin (↵1
Q1
� ↵2
Q2
)� !
↵2
P2
+dh
dt. (8.4.58)
Sin embargo, el ultimo termino es una derivada total con respecto al tiem-po y por lo tanto puede ser eliminado mediante una transformacion decalibracion. Por esta razon, concluimos que el Hamiltoniano en las nuevascoordenadas sera
K = P1
P2
sin (↵1
Q1
� ↵2
Q2
)� !
↵2
P2
. (8.4.59)
8.5. Oscilador Armonico Amortiguado
Un oscilador amortiguado unidimensional esta descrito por el lagrangiano
L = eRt
m
1
2mx2 � 1
2kx2
�
. (8.5.1)

CAPITULO 8. TRANSFORMACIONES CANONICAS 253
La ecuacion de movimiento correspondiente se obtiene facilmente a partir de lasecuaciones de Euler-Lagrange. Para ello se tiene
@L
@x= �eRt
m kx (8.5.2)
y
d
dt
✓
@L
@x
◆
=d
dt
⇣
eRt
m mx⌘
.
Por lo tanto la ecuacion de movimiento es
d
dt
✓
@L
@x
◆
� @L
@x=
d
dt
⇣
eRt
m mx⌘
+ eRt
m kx = 0 (8.5.3)
eRt
m
R
mmx+ e
Rt
m mx+ eRt
m kx = 0 (8.5.4)
mx+Rx+ kx = 0. (8.5.5)
Para obtener el Hamiltoniano de este sistema, definimos el momentum canoni-camente conjugado como
p =@L
@x= e
Rt
m mx (8.5.6)
de donde se puede despejar
x = e�Rt
m
p
m. (8.5.7)
Realizando la tranformacion de Legendre del Lagrangiano tenemos
H =X
i
pixi � L = p⇣
e�Rt
m
p
m
⌘
� eRt
m
1
2m⇣
e�Rt
m
p
m
⌘
2
� 1
2kx2
�
(8.5.8)
H = e�Rt
m
p2
m� 1
2e�
Rt
m
p2
m+ e
Rt
m
1
2kx2 (8.5.9)
H = e�Rt
m
p2
2m+ e
Rt
m
1
2kx2. (8.5.10)
Realizaremos ahora la transformacion
(
q = eRt
2mx
⇡ = e�Rt
2m p. (8.5.11)
La matriz de transformacion tiene las componentes
J =
@q@x
@q@p
@⇡@x
@⇡@p
!
=
eRt
2m 0
0 e�Rt
2m
!
. (8.5.12)

CAPITULO 8. TRANSFORMACIONES CANONICAS 254
Notese que esta matriz es simplectica ya que
JEJ =
eRt
2m 0
0 e�Rt
2m
!
✓
0 1�1 0
◆
eRt
2m 0
0 e�Rt
2m
!
(8.5.13)
JEJ =
eRt
2m 0
0 e�Rt
2m
!
0 e�Rt
2m
�e Rt
2m 0
!
(8.5.14)
JEJ =
✓
0 1�1 0
◆
= E. (8.5.15)
Por ello concluimos que la transformacion (8.5.11) es canonica. y para encon-trar su funcion generadora consideraremos las condiciones (8.4.36) que definenuna funcion del tipo F
2
(x,⇡, t),
8
>
<
>
:
pk = @F2@q
k
Qk = @F2@P
k
= @F2@t
. (8.5.16)
En este caso corresponden a las ecuaciones diferenciales
8
>
<
>
:
p = @F2@x = e
Rt
2m⇡
q = @F2@⇡ = e
Rt
2mx
= @F2@t
. (8.5.17)
Integrando la primera ecuacion se obtiene
F2
= eRt
2m⇡x+ f (⇡, t) (8.5.18)
y al reemplazar en la segunda ecuacion,
@F2
@⇡= e
Rt
2mx+@f
@⇡= e
Rt
2mx (8.5.19)
@f
@⇡= 0 =) f = f (t) . (8.5.20)
De esta forma la funcion generadora sera
F2
= eRt
2m⇡x+ f (t) . (8.5.21)
La ultima ecuacion diferencial permite encontrar la funcion ,
=@F
2
@t= e
Rt
2mR
2m⇡x+
df
dt. (8.5.22)
El Hamiltoniano en las nuevas coordenadas, K (q,⇡, t) se obtiene mediantela relacion

CAPITULO 8. TRANSFORMACIONES CANONICAS 255
K = H + , (8.5.23)
donde el primer termino del lado derecho es
H = e�Rt
m
⇣
eRt
2m⇡⌘
2
2m+ e
Rt
m
1
2k⇣
e�Rt
2m q⌘
2
(8.5.24)
H =⇡2
2m+
1
2kq2 (8.5.25)
mientras que la funcion se escribe en la nuevas coordenadas como
= eRt
2mR
2m⇡x+
df
dt=
R
2m⇡q +
df
dt. (8.5.26)
Ası, el nuevo Hamiltoniano es
K =⇡2
2m+
1
2kq2 +
R
2m⇡q +
df
dt(8.5.27)
y ya que el ultimo termino es una derivada total con respecto al tiempo, estetermino se puede eliminar con una transformacion de calibracion y por ello elresultado es simplemente
K =⇡2
2m+
1
2kq2 +
R
2m⇡q. (8.5.28)
Notese que con esta transformacion canonica se obtuvo un Hamiltonianoindependiente de t.
8.6. Transformaciones Canonicas Infinitesimales
Considerese una transformacion infinitesimal definida por las ecuaciones
(
Qi = qi + �qiPi = pi + �pi
(8.6.1)
o en forma vectorial como
⇠ = ⌘ + �⌘. (8.6.2)
Notese que esta transformacion es la identidad mas las correcciones infinite-simales. Por lo tanto la funcion generadora se podra escribir como
F2
(qi, Pi, t) =X
i
qiPi + ✏G (qi, Pi, t) (8.6.3)
donde ✏ es un parametro infinitesimal, ✏ ⌧ 1. Para que la transformacion seacannonica, la funcion generadora debe satisfacer
CAPITULO 8. TRANSFORMACIONES CANONICAS 256
dF2
=X
k
[pkdqk +QkdPk] (8.6.4)
con(
pk = @F2@q
k
Qk = @F2@P
k
.(8.6.5)
Utilizando (8.6.3), estas ecuaciones seran
(
pk = Pk + ✏ @G@qk
Qk = qk + ✏ @G@Pk
,(8.6.6)
o reordenando,
(
Pk = pk � ✏ @G@qk
Qk = qk + ✏ @G@Pk
,(8.6.7)
Es decir que, al comparar con (8.6.1),
�qk = ✏@G
@Pk(8.6.8)
�pk = �✏ @G@qk
. (8.6.9)
Ahora bien, notese que la expansion de la funcion G en terminos del para-metro infinitesimal sera
G (qk, Pk, t) = G (qk, pk + �pk, t) ⇡ G (qk, pk, t) +
✓
@G
@Pk
◆
Pk
=pk
�pk + ...
(8.6.10)Ya que la funcion G siempre esta acompanado del parametro infinitesimal
notese que
✏G (qk, Pk, t) ⇡ ✏G (qk, pk, t) +
✓
@G
@Pk
◆
Pk
=pk
✏�pk + ... (8.6.11)
pero debido a la forma que adquiere el infinitesima �pk, ecuacion (8.6.9), elsegundo termino en esta expansion es de orden O �
✏2�
y por lo tanto se puededespreciar, dando lugar a
✏G (qk, Pk, t) = ✏G (qk, pk, t) +O �
✏2�
. (8.6.12)
Debido a esta relacion y a la forma que adquieren los terminos infinitesimales(8.6.8) y (8.6.9), estos se puede escribir en forma matricial como
�⌘ = ✏E@G
@⌘, (8.6.13)

CAPITULO 8. TRANSFORMACIONES CANONICAS 257
y la ecuacion de transformacion (8.6.2) se convierte en
⇠ = ⌘ + �⌘ = ⌘ + ✏E@G
@⌘. (8.6.14)
Derivando con respecto a las coordenadas originales se obtienen las compo-nentes de la matriz de transformacion,
@⇠
@⌘= J = 1+ ✏E
@2G
@⌘@⌘, (8.6.15)
donde el segundo termino de la derecha representa las componentes simetricasde la forma
@2G
@⌘µ@⌘⌫=
@2G
@⌘⌫@⌘µ. (8.6.16)
La matriz de transformacion transpuesta es
J = 1+ ✏^E@2G
@⌘@⌘= 1+ ✏
@2G
@⌘@⌘eE (8.6.17)
pero ya que @2G
@⌘@⌘ es simetrica, entonces ]@2G@⌘@⌘ = @2G
@⌘@⌘ y ademas se tiene queE =�E. Por lo tanto
J = 1� ✏ @2G
@⌘@⌘E. (8.6.18)
De esta manera,podemos calcular el producto
JEJ =
✓
1� ✏ @2G
@⌘@⌘E
◆
E
✓
1+ ✏E@2G
@⌘@⌘
◆
(8.6.19)
JEJ =
✓
1� ✏ @2G
@⌘@⌘E
◆✓
E+ ✏E2
@2G
@⌘@⌘
◆
(8.6.20)
JEJ =
✓
1� ✏ @2G
@⌘@⌘E
◆✓
E� ✏E @2G
@⌘@⌘
◆
(8.6.21)
JEJ = E� ✏E @2G
@⌘@⌘� ✏ @
2G
@⌘@⌘E2 +O �
✏2�
(8.6.22)
JEJ = E� ✏E @2G
@⌘@⌘+ ✏
@2G
@⌘@⌘E+O �
✏2�
. (8.6.23)
Debido a la simetrıa de @2G@⌘@⌘ y a la forma de E los dos terminos de la derecha
se cancelan para obtener
JEJ = E+O �
✏2�
. (8.6.24)
Es decir que a primer orden en ✏, la matriz de transformacion es simplectica,
CAPITULO 8. TRANSFORMACIONES CANONICAS 258
JEJ = E (8.6.25)
y por lo tanto la transformacion infinitesimal es canonica.
8.6.1. Transformaciones Infinitesimales y Corchetes de Pois-son
En terminos matriciales, el corchete de Poisson entre dos funciones u y v seescribe en la forma
[u, v]⌘,⌘ =g@u
@⌘E@v
@⌘. (8.6.26)
Tomando como caso particular las funciones ⌘ y G se tiene
[⌘, G]⌘,⌘ =f@⌘
@⌘E@G
@⌘= E
@G
@⌘. (8.6.27)
De esta forma, la ecuacion (8.6.13) se convierte en
�⌘ = ✏E@G
@⌘= ✏ [⌘, G]⌘,⌘ . (8.6.28)
EjemploHamiltoniano como Generador del MovimientoConsidere la transformacion infinitesimal
⌘ (t) �! ⌘ (t+ dt) (8.6.29)
donde el parametro infinitesimal que determina la transformacion es ✏ = dt.Otra forma de escribir esta transformacion es
⇠ = ⌘ + �⌘ = ⌘ + ⌘dt. (8.6.30)
Para representar esta transformacion en terminos de los corchetesdePoisson basta con elegir la funcion generadora como el Hamiltoniano, G =H, ya que entonces la ecuacion (8.6.13) se convierte en
�⌘ = ✏ [⌘, G]⌘,⌘ = dt [⌘, H]⌘,⌘ (8.6.31)
�⌘ = dt⌘. (8.6.32)
Esto muestra que el Hamiltoniano es el generador del movimiento me-diante una transformacion canonica dependiente del tiempo.

CAPITULO 8. TRANSFORMACIONES CANONICAS 259
8.6.2. Cambio de una Funcion bajo una TransformacionCanonica Infinitesimal
Considere una funcion escalar de las coordenadas en el espacio de fase, f (⌘),y una transformacion canonica infinitesimal
⌘ �! ⇠ = ⌘ + �⌘. (8.6.33)
El cambio en la funcion al aplicar la transformacion estara dado por
@f = f (⌘ + �⌘)� f (⌘) . (8.6.34)
Esta expresion se puede escribir como
@f = f (⌘) +f@f
@⌘�⌘ � f (⌘) (8.6.35)
@f =f@f
@⌘�⌘, (8.6.36)
donde f@f@⌘ es el gradiente de la funcion f . Introduciendo la funcion generadora
G, el cambio en la funcion bajo la transformacion infinitesimal es
@f =f@f
@⌘✏E@G
@⌘= ✏
f@f
@⌘E@G
@⌘(8.6.37)
@f = ✏ [f,G]⌘,⌘ . (8.6.38)
8.6.3. Cambio en el Hamiltoniano bajo una Transforma-cion Canonica Infinitesimal
Bajo una transformacion canonica dependiente del tiempo, el HamiltonianoH (⌘, t) cambia de acuerdo con (8.3.100),
K (⇠) = H (⇠) +@F
@t(8.6.39)
donde F es la funcion generadora de la transformacion y H (⇠) = H [⇠ (⌘)]. Sila transformacion es infinitesimal tenemos
⇠ = ⌘ + �⌘ (8.6.40)
y la funcion generadora como
F = ✏G, (8.6.41)
por lo que el nuevo Hamiltoniano sera
K (⌘ + �⌘) = H (⌘ + �⌘) + ✏@G
@t. (8.6.42)

CAPITULO 8. TRANSFORMACIONES CANONICAS 260
El cambio en la funcion Hamiltoniana debido a la transformacion estara dadopor
@H = K (⌘ + �⌘)�H (⌘) (8.6.43)
@H = H (⌘ + �⌘) + ✏@G
@t�H (⌘) (8.6.44)
pero de acuerdo con la ecuacion (8.6.38) se tiene que
H (⌘ + �⌘)�H (⌘) = ✏ [H,G]⌘,⌘ (8.6.45)
y por lo tanto
@H = ✏ [H,G]⌘,⌘ + ✏@G
@t(8.6.46)
@H = ✏dG
dt, (8.6.47)
donde se ha utilizado la relacion (7.9.6).Un caso particular de interes de esta relacion ocurre cuando la transforma-
cion es generada por una constante de movimiento, en cuyo caso se tendra
@H = ✏dG
dt= 0, (8.6.48)
es decir que las constantes de movimiento generan transformaciones canonicasinfinitesimales que dejan invariante el Hamiltoniano.
EjemploTransformacion generada por una constante de movimiento.Considere un sistema en el cual la coordenada qk es cıclica y por lo tanto
su momentum canonicamente conjugado, pk, es una constante. Tomaremoscomo funcion generadora
G (q, p, t) = pk. (8.6.49)
El cambio en las coordenadas bajo esta transformacione sta dado por
�⌘ = ✏ [⌘, G]⌘,⌘ = ✏ [⌘, pk]⌘,⌘ . (8.6.50)
Escribiendo en componentes esta ecuacion y utilizando los corchetesfundamentales se tiene
(
�qi = ✏ [qi, pk]q,p = ✏�ik�pi = ✏ [pi, pk]q,p = 0.
(8.6.51)
Esto muestra que el unico cambio que se realzia corresponde a un des-plazamiento (traslacion) infinitesimal en la direccion

CAPITULO 8. TRANSFORMACIONES CANONICAS 261
�qk = ✏. (8.6.52)
Es inmediato concluir que ya que qk es una coordenada cıclica, el Hamilto-niano es un invariante bajo esta traslacion infinitesimal.
EjemploRotaciones como transformaciones generada por el momento angular.Considere un sistema fısico descrito por las coordenadas ~r = (x, y, z) y
los correspondientes momentos ~p = (px, py, pz). Una rotacion infinitesimalen un angulo d✓ alrededor del eje z estara representada por la matriz
R =
0
@
cos d✓ � sin d✓ 0sin d✓ cos d✓ 00 0 1
1
A '0
@
1 �d✓ 0d✓ 1 00 0 1
1
A . (8.6.53)
Bajo esta transformacion se obtienen las nuevas coordenadas y momentos
0
@
XYZ
1
A =
0
@
1 �d✓ 0d✓ 1 00 0 1
1
A
0
@
xyz
1
A =
0
@
x� yd✓xd✓ + y
z
1
A (8.6.54)
0
@
PX
PY
PZ
1
A =
0
@
1 �d✓ 0d✓ 1 00 0 1
1
A
0
@
pxpypz
1
A =
0
@
px � pyd✓pxd✓ + py
pz
1
A . (8.6.55)
Para representar esta transformacion utilizaremos una funcion genera-dora de la forma
G (x, y, z, px, py, pz) = xpy � ypx (8.6.56)
y un parametro infinitesimal
✏ = d✓. (8.6.57)
Notese que la funcion generadora no es mas que la componente z del mo-mento angular,
G = `z = (~r ⇥ ~p)z . (8.6.58)
El cambio en las coordenadas esta dado por la ecuacion
�⌘ = ✏ [⌘, G]⌘,⌘ = d✓ [⌘, xpy � ypx]⌘,⌘ , (8.6.59)
que en este caso particular se descompone en las ecuaciones
CAPITULO 8. TRANSFORMACIONES CANONICAS 262
8
>
<
>
:
�x = d✓ [x, xpy � ypx]
�y = d✓ [y, xpy � ypx]
�z = d✓ [z, xpy � ypx]
. (8.6.60)
La porimera de estas relaciones resulta en
�x = d✓ [x, xpy � ypx] = d✓
(
X
i
@x
@ri
@ (xpy � ypx)
@pi� @ (xpy � ypx)
@ri
@x
@pi
�
)
(8.6.61)
�x = d✓
⇢
@x
@x
@ (xpy � ypx)
@px+@x
@y
@ (xpy � ypx)
@py+@x
@z
@ (xpy � ypx)
@pz
�
(8.6.62)
�x = �yd✓. (8.6.63)
La segunda ecuacion es
�y = d✓ [y, xpy � ypx] = d✓
(
X
i
@y
@ri
@ (xpy � ypx)
@pi� @ (xpy � ypx)
@ri
@y
@pi
�
)
(8.6.64)
�x = d✓
⇢
@y
@x
@ (xpy � ypx)
@px+@y
@y
@ (xpy � ypx)
@py+@y
@z
@ (xpy � ypx)
@pz
�
(8.6.65)
�y = xd✓, (8.6.66)
mientras que la tercera resulta en
�z = d✓ [z, xpy � ypx] = d✓
(
X
i
@z
@ri
@ (xpy � ypx)
@pi� @ (xpy � ypx)
@ri
@z
@pi
�
)
(8.6.67)
�x = d✓
⇢
@z
@x
@ (xpy � ypx)
@px+@z
@y
@ (xpy � ypx)
@py+@z
@z
@ (xpy � ypx)
@pz
�
(8.6.68)
�z = 0. (8.6.69)

CAPITULO 8. TRANSFORMACIONES CANONICAS 263
Resultados similares se obtienen para los cambios en los momentos. Deesta manera, la ecuacion (8.6.59) permite la identificacion del momentoangular como generador de las rotaciones rigidas de un sistema. Ademas,esta relacion se puede generalizar de tal forma que el cambio de cualquierfuncion vectorial ~A bajo una rotacion infinitesimal del sistema alrededor deun eje fijo n, generado por ~· n, puede ser escrito en notacion vectorial como
@ ~A = d✓h
~A, ~ · ni
. (8.6.70)
En la ecuacion (4.6.23) se comprobo que el cambio de un vector bajouna rotacion infinitesimal se puede escribir como el producto cruz
@ ~A = d✓n⇥ ~A. (8.6.71)
y por lo tanto el corchete de Poisson se puede escribir como
d✓h
~A, ~ · ni
= d✓n⇥ ~A (8.6.72)
h
~A, ~ · ni
= n⇥ ~A. (8.6.73)

Capıtulo 9
Teoria de Hamilton-Jacobi
La teorıa de Hamilton-Jacobi se base en buscar una transformacion canonicadependiente del tiempo tal que convierta las coordenadas y los momentos (qj , pj)en cualquier instante de tiempo t en un conjunto de 2n cantidades constantes. Esdecir que las ecuaciones de movimiento en el nuevo sistema seran simplemente
(
Qi = 0
Pi = 0.(9.0.1)
Es usual que las nuevas coordenadas coincidan con los valores iniciales, i.e.(Qi, Pi) = (qi0, pi0). De esta forma, las ecuaciones de transformacion inversas
(
qj = qj (qi0, pi0, t)
pj = pj (qi0, pi0, t)(9.0.2)
corresponden a la solucion del problema.Para asegurar que las nuevas variables sean constantes en el tiempo basta
con lograr que el nuevo Hamiltoniano sea identicamente nulo, K = 0, ya que eneste caso se tendrıa
(
Qi = @K@P
i
= 0
Pi = � @K@Q
i
= 0.(9.0.3)
Ahora bien, ya que en general la transformacion canonica buscada depende deltiempo, esta condicion implica que la funcion generadora F debe satisfacer lacondicion
K = 0 =) H (qi, pi, t) +@F
@t= 0. (9.0.4)
Si por ejemplo se considera una funcion generadora de la forma F2
(qi, Pi, t)la cual debe cumplir
264

CAPITULO 9. TEORIA DE HAMILTON-JACOBI 265
8
>
<
>
:
pk = @F2@q
k
Qk = @F2@P
k
= @F2@t
. (9.0.5)
entonces se tiene la condicion
H
✓
q1
...qn,@F
2
@q1
, ...,@F
2
@qn, t
◆
+@F
2
@t= 0. (9.0.6)
Esta se conoce como la Ecuacion de Hamilton-Jacobi y es una ecuaciondiferencial parcial no lineal en n + 1 variables: q
1
, ..., qn, t. La solucion de estaecuacion se suele denotar como
F2
= S (q1
, ..., qn,↵1
, ....,↵n+1
, t) (9.0.7)
y se le denomina la Funcion Principal de Hamilton. Las cantidades ↵1
, ....,↵n+1
corresponden a las n+1 constantes de integracion independientes que aparecendurante el proceso de integracion. Sin embargo, una de estas constantes es irre-levante ya que en la ecuacion de Hamilton-Jacobi solamente aparecen derivadasde la funcion F
2
y por lo tanto si S es una solucion, tambien lo es S + ↵ con↵ = constante. Es decir que una de las n+1 constantes de integracion es aditivay al no ser importante para generar la transformacion, esta puede ser olvidada.De esta forma, la solucion completa puede escribirse con la dependencia
F2
= S (q1
, ..., qn,↵1
, ....,↵n, t) (9.0.8)
donde ahora ninguna de las constantes ↵1
, ...,↵n es aditiva. Al comparar conla dependencia esperada para una funcion del tipo F
2
es facil notar que estasconstantes pueden identificarse con los valores de los nuevos momentos Pi, esdecir
Pi = ↵i. (9.0.9)
Estos valores constantes se pueden poner en terminos de los valores inicialesde las coordenadas y los momentos. Para ello, notese que el primer conjunto decondiciones en la ecuacion (9.0.5) permite escribir
pk =@S (q,↵, t)
@qk. (9.0.10)
Al evaluar esta ecuacion en t = t0
se obtiene un conjunto de n-relacionesentre los ↵ y los valores iniciales (qi0, pi0),
pk0 =@S [(q
1
)0
, ..., (qn)0
,↵1
, ...,↵n, t0]
@qk, (9.0.11)
de donde se puede despejar y obtener los n-valores
↵k = ↵k (qi0, pi0, t0) . (9.0.12)

CAPITULO 9. TEORIA DE HAMILTON-JACOBI 266
El segundo conjunto de condiciones en la ecuacion (9.0.5) resulta ser
Qk =@S (q,↵, t)
@Pk=@S (q,↵, t)
@↵k= �k (9.0.13)
donde �k representa los valores constantes de las nuevas coordenadas Qk, los-cuales tambien pueden ponerse en terminos de las condiciones iniciales (qi0, pi0).Para ello basta con evaluar esta relacion en t = t
0
con np que se tiene
�k =@S [(q
1
)0
, ..., (qn)0
,↵1
, ...,↵n, t0]
@↵k= �k (qi0, pi0, t0) . (9.0.14)
Finalmente, dadas las constantes ↵i y �i, la relacion (9.0.13) que es validapara cualquier instante de tiempo t permite, en principio, resolverse para obtenerla solucion del problema,
qj = qj (↵,�, t) (9.0.15)
y reemplazando esta solucion en la ecuacion (9.0.10) se obtienen los momentossolucion,
pj = pj (↵,�, t) . (9.0.16)
El significado fısico de la funcion principal de Hamilton puede establecersemas profundamente al considerar su derivada temporal
dS
dt=X
i
@S
@qiqi +
@S
@t, (9.0.17)
ya que los momentos Pi son constantes. A partir de la ecuacion de Hamilton-Jacobi se puede escribir
dS
dt=X
i
piqi �H = L. (9.0.18)
Esta ecuacion muestra que la funcion principal de Hamilton es la integraldel Lagrangiano en el tiempo, excepto por una constante aditiva,
S =
ˆLdt+ constante. (9.0.19)
Es decir que S es la integral de accion pero en forma indefinida. Aun cuandoesta relacion es interesante, no presenta una utilidad practica ya que para poderrealizar la integracion debe conocerse la solucion del problema (es decir losvalores de los qi y lospi).
Ahora bien, cuando el Hamiltoniano no depende explıcitamente del tiempo,la funcion principal de Hamilton puede separarse en la forma
S (q, t) = W (q)� S0
(t) (9.0.20)

CAPITULO 9. TEORIA DE HAMILTON-JACOBI 267
y la Ecuacion de Hamilton-Jacobi tendra la forma restringida
H
✓
q,@W
@q
◆
+@S
0
@t= 0 (9.0.21)
la cual se puede separar utilizando una constante ↵
H
✓
q,@W
@q
◆
= �@S0
@t= ↵. (9.0.22)
De este par de ecuaciones es claro que
S0
= �↵t (9.0.23)
y por lo tanto
S (q,↵, t) = W (q,↵)� ↵t (9.0.24)
donde W (q,↵) se denomina la Funcion Caracterıstica de Hamilton. De nuevo,para profundizar en el significado fısico de esta funcion, tomamos su derivadatotal con respecto al tiempo,
dW
dt=X
i
@W
@qiqi. (9.0.25)
Por otro lado, el primer conjunto de ecuaciones en (9.0.5) resultan ser
pk =@S
@qk=@W
@qk, (9.0.26)
por lo cual se tendra
dW
dt=X
i
piqi. (9.0.27)
Al integrar esta ecuacion se obtiene
W =
ˆX
i
piqidt =
ˆX
i
pidqi (9.0.28)
que es una forma abreviada de la accion.
EjemploCaida LibreUna partıcula libre sujeta a la aceleracion gravitacional en la superficie
de la Tierra estara descrita por el Lagrangiano
L =1
2my2 �mgy. (9.0.29)
El momento canonicamente conjugado a la variable y es

CAPITULO 9. TEORIA DE HAMILTON-JACOBI 268
py =@L
@y= my (9.0.30)
y el Hamiltoniano es
H =p2ym�"
1
2
p2ym�mgy
#
(9.0.31)
H =1
2
p2ym
+mgy. (9.0.32)
Utilizando
py =@S
@y(9.0.33)
la ecuacion de Hamilton-Jacobi toma la forma
1
2m
✓
@S
@y
◆
2
+mgy +@S
@t= 0. (9.0.34)
Ya que el tiempo no aparece explıcitamente en el Hamiltoniano, la fun-cion principal de Hamilton se puede separar como
S = W (y,↵)� ↵t (9.0.35)
con lo cual se tiene
1
2m
✓
@W
@y
◆
2
+mgy = ↵. (9.0.36)
Esta ecuacion muestra que la constante ↵ debe ser identificada con laenergia mecanica total y corresponde al nuevo momentum generalizado
P = ↵ = H =1
2
p2ym
+mgy. (9.0.37)
En particular, al evaluar en el instante inicial t = t0
se identifica laconstante ↵ con
↵ =1
2
(p0y)
2
m+mgy
0
. (9.0.38)
Al integrar la ecuacion de Hamilton-Jacobi se obtiene
✓
@W
@y
◆
2
= 2m (↵�mgy) (9.0.39)
W =
ˆp
2m (↵�mgy)dy (9.0.40)

CAPITULO 9. TEORIA DE HAMILTON-JACOBI 269
y por lo tanto la funcion principal de Hamilton sera formalmente
S =
ˆp
2m (↵�mgy)dy � ↵t. (9.0.41)
El momento canonicamente conjugado es
py =@S
@y=@W
@y=p
2m (↵�mgy). (9.0.42)
La nueva coordenada generalizada se obtiene mediante
Q = � =@S
@P=@S
@↵(9.0.43)
� =
ˆ@
@↵
p
2m (↵�mgy)dy � t (9.0.44)
� =
ˆm
p
2m (↵�mgy)dy � t (9.0.45)
� = � 1
mg
p
2m (↵�mgy)� t. (9.0.46)
Para identificar la constante � evaluamos esta expresion en t = t0
,
� = � 1
mg
p
2m (↵�mgy0
)� t0
(9.0.47)
y utilizamos el valor de ↵ obtenido antes,
� = � 1
mg
v
u
u
t2m
"
1
2
(p0y)
2
m+mgy
0
!
�mgy0
#
� t0
(9.0.48)
� = �p0y
mg� t
0
(9.0.49)
La solucion del problema se obtiene despejando la coordenada y,
� + t = � 1
mg
p
2m (↵�mgy) (9.0.50)
m2g2 (t+ �)2 = 2m (↵�mgy) (9.0.51)
2m2gy = 2m↵�m2g2 (t+ �)2 (9.0.52)
y =↵
mg� 1
2g (t+ �)2 . (9.0.53)

CAPITULO 9. TEORIA DE HAMILTON-JACOBI 270
Reemplazando los valores encontrados para ↵ y � en terminos de losvalores iniciales se tiene
y =1
mg
1
2
(p0y)
2
m+mgy
0
!
� 1
2g
t� p0y
mg� t
0
�
2
(9.0.54)
y =1
2
(p0y)
2
m2g+ y
0
� 1
2g
"
✓
p0y
mg
◆
2
� 2p0y
mg(t� t
0
) + (t� t0
)2#
(9.0.55)
y = y0
+p0y
m(t� t
0
) +�1
2g (t� t
0
)2 , (9.0.56)
la cual corresponde a la bien conocida solucion del problema.Para finalizar, el momento canonicamente conjugado es
py =@S
@y=@W
@y=p
2m (↵�mgy) (9.0.57)
y en terminos de las conidciones iniciales este es
py =
v
u
u
t2m
"
1
2
(p0y)
2
m+mgy
0
!
�mgy
#
(9.0.58)
py = m
s
(p0y)
2
m2
+ 2g (y0
� y) (9.0.59)
o mejor
⇣pym
⌘
2
=⇣p
0y
m
⌘
2
� 2g (y � y0
) . (9.0.60)
EjemploEl Oscilador Armonico UnidimensionalEl Hamiltoniano del oscilador armonico unidimensional se puede escribir
H =p2
2m+
1
2kq2 (9.0.61)
o definiendo !2 = km ,
H =1
2m
⇥
p2 +m2!2q2⇤
. (9.0.62)
Para escribir la ecuacion de Hamilton-Jacobi en terminos de la funcionS utilizamos

CAPITULO 9. TEORIA DE HAMILTON-JACOBI 271
p =@S
@q(9.0.63)
con lo que se obtiene
1
2m
"
✓
@S
@q
◆
2
+m2!2q2#
+@S
@t= 0 (9.0.64)
y ya que el Hamiltoniano no depende explıcitamente del tiempo, supondre-mos que la funcion principal de Hamilton se puede separar en la forma
S (q,↵, t) = W (q,↵)� ↵t. (9.0.65)
Reemplazando en la ecuacion de Hamilton-Jacobi se tiene
1
2m
"
✓
@W
@q
◆
2
+m2!2q2#
� ↵ = 0. (9.0.66)
Esta ecuacion muestra que la constante ↵ debe ser identificada con laenergia mecanica total y corresponde al nuevo momentum generalizado
H = ↵ = P. (9.0.67)
Despejando de la ecuacion de Hamilton-Jacobi se tiene
✓
@W
@q
◆
2
+m2!2q2 = 2m↵ (9.0.68)
@W
@q=p
2m↵�m2!2q2 (9.0.69)
W =
ˆp
2m↵�m2!2q2dq (9.0.70)
y por lo tanto la funcion principal de Hamilton sera formalmente
S (q,↵, t) =
ˆp
2m↵�m2!2q2dq � ↵t. (9.0.71)
La nueva coordenada generalizada se obtiene mediante
Q = � =@S
@P=@S
@↵(9.0.72)
� =
ˆ@
@↵
h
p
2m↵�m2!2q2i
dq � t (9.0.73)
� =
ˆm
p
2m↵�m2!2q2dq � t. (9.0.74)

CAPITULO 9. TEORIA DE HAMILTON-JACOBI 272
La integral se puede reescribir como
� =
r
m
2↵
ˆ1
q
1� m!2q2
2↵
dq � t (9.0.75)
y su valor se puede obtener facilmente como
� =
r
m
2↵
r
2↵
m
1
!arcsin
r
m
2↵!q
�
� t (9.0.76)
� =1
!arcsin
r
m
2↵!q
�
� t. (9.0.77)
La solucion del problema se obtiene despejando la coordenada q,
t+ � =1
!arcsin
r
m
2↵!q
�
(9.0.78)
q =
r
2↵
m!2
sin (!t+ !�) (9.0.79)
q = q0
sin (!t+ ') (9.0.80)
donde se ha definido el valor inicial q0
=q
2↵m!2 y la constante ' = !�, la
cual corresponde a una fase en el comportamiento de la coordenada q.Finalmente, el momentum se obtiene mediante la relacion
p =@S
@q=@W
@q=p
2m↵�m2!2q2. (9.0.81)
Reemplazando la coordenada q se tiene
p =q
2m↵�m2!2q20
sin2 (!t+ ') (9.0.82)
p =
s
2m↵�m2!2
✓
2↵
m!2
◆
sin2 (!t+ ') (9.0.83)
p =q
2m↵⇥
1� sin2 (!t+ ')⇤
(9.0.84)
p =p2m↵ cos (!t+ ') (9.0.85)
p = p0
cos (!t+ ') (9.0.86)
donde se ha definido el valor inicial p0
=p2m↵.

CAPITULO 9. TEORIA DE HAMILTON-JACOBI 273
EjemploOscilador Armonico Bidimensional AnisotropicoConsideremos ahora un oscilador armonico anisotropico en dos dimen-
siones. El Hamiltoniano de este sistema sera
H =1
2m
⇥
p2x + p2y +m2!2
xx2 +m2!2
yy2
⇤
(9.0.87)
donde m es la masa del cuerpo oscilante y
(
!2
x = kx
m
!2
y = ky
m
(9.0.88)
son las frecuencias de oscilacion en las direcciones x y y, correspondiente-mente. Ya que las coordenadas y los momentos se agrupan en dos conjuntosseparados y debido a que el Hamiltoniano no depende del tiempo, propon-dremos que la funcion principal de Hamilton se puede separar en la forma
S (x, y,↵x,↵yt) = W (x, y,↵x,↵y)� ↵t. (9.0.89)
Ası, la ecuacion de Hamilton-Jacobi sera
1
2m
"
✓
@W
@x
◆
2
+
✓
@W
@y
◆
2
+m2!2
xx2 +m2!2
yy2
#
= ↵ (9.0.90)
y con ello se nota que la constante ↵ se identifica con la energıa mecanicatotal del oscilador. Para resolver esta ecuacion separamos las contribucionesde las variables introduciendo las constantes ↵x y ↵y. Con ello
8
<
:
1
2m
�
@W@x
�
2
+ 1
2
m!2
xx2 = ↵x
1
2m
⇣
@W@y
⌘
2
+ 1
2
m!2
yy2 = ↵y
(9.0.91)
y por lo tanto las constantes ↵x y ↵y no son independientes, sino que estanligadas con la energıa total mediante
↵x + ↵y = ↵. (9.0.92)
Esto muestra que en realidad solo son necesarias constantes. Ya que lasecuaciones de Hamilton-Jacobi para las componentes x y y tienen exacta-mente la misma forma que la presentada en la ecuacion (9.0.66), su soluciontambien es la misma. Por ello tenemos
8
>
>
>
<
>
>
>
:
x = x0
sin (!xt+ 'x)
y = y0
sin (!yt+ 'y)
px = px0 cos (!xt+ 'x)
py = py0 cos (!yt+ 'y)
(9.0.93)

CAPITULO 9. TEORIA DE HAMILTON-JACOBI 274
donde las constantes iniciales se han definido como
x0
=
s
2↵x
m!2
x
(9.0.94)
y0
=
s
2↵y
m!2
y
(9.0.95)
y
p0x =
p2m↵x (9.0.96)
p0y =
p
2m↵y. (9.0.97)
EjemploOscilador Armonico Bidimensional IsotropicoA partir de los resultados del ejemplo anterior analizaremos ahora el
socilador armonico bidimensional isotropico. Para ello tomamos
kx = ky = k (9.0.98)
y!x = !y = !. (9.0.99)
Si utilizamos ahora coordenadas polares (r, ✓) definidas mediante
(
r =p
x2 + y2
✓ = tan�1
�
yx
� (9.0.100)
se tiene que
(
x = r cos ✓
y = r sin ✓(9.0.101)
y derivando con respecto al tiempo,
(
x = r cos ✓ � r✓ sin ✓
y = r sin ✓ + r✓ cos ✓.(9.0.102)
A partir de esta relacion tenemos que
p2 = p2x + p2y = m2
⇣
r2 + r2✓2⌘
(9.0.103)

CAPITULO 9. TEORIA DE HAMILTON-JACOBI 275
p2 = p2r +p2✓r2
(9.0.104)
donde se ha utilizado
(
pr = mr
p✓ = mr2✓. (9.0.105)
De esta manera, el Hamiltoniano tomara la forma
H =1
2m
⇥
p2x + p2y +m2!2x2 +m2!2y2⇤
(9.0.106)
H =1
2m
p2r +p2✓r2
+m2!2r2�
. (9.0.107)
Notese que este Hamiltoniano es cıclico en la coordenada ✓ y no dependeexplıcitamente del tiempo. Por ello propondremos que la funcion principalde Hamilton se puede separar en la forma
S (r, ✓,↵,↵✓, t) = Wr (r,↵) +W✓ (✓,↵✓)� ↵t (9.0.108)
S (r, ✓,↵,↵✓, t) = Wr (r,↵) + ↵✓✓ � ↵t, (9.0.109)
donde se ha utilizado que para una coordenada cıclica qk, la funcion carac-terıstica siempre toma la forma Wq
k
= ↵kqk (esto se demostrara en formageneral en la seccion siguiente). Ası, el momento p✓, canonicamente conjua-do a la variable ✓ se calcula a partir de la funcion generadora simplementecomo
p✓ =@S
@✓=@W✓
@✓= ↵✓. (9.0.110)
Al sustituir en la ecuacion de Hamilton-Jacobi se obtiene
1
2m
✓
@Wr
@r
◆
2
+↵2
✓
2mr2+
1
2m2!2r2 = ↵. (9.0.111)
De nuevo, la constante ↵ se identifica con la energıa mecanica total deloscilador. En lugar de resolver esta ecuacion para obtener Wr, utilizaremoslas soluciones encontradas en el ejemplo anterior, las cuales se escribiran eneste caso como
8
>
>
>
<
>
>
>
:
x = x0
sin (!t+ 'x)
y = y0
sin (!t+ 'y)
px = px0 cos (!t+ 'x)
py = py0 cos (!t+ 'y)
(9.0.112)

CAPITULO 9. TEORIA DE HAMILTON-JACOBI 276
donde
x0
=
r
2↵
m!2
(9.0.113)
y0
=
r
2↵
m!2
(9.0.114)
y
p0x =
p2m↵ (9.0.115)
p0y =
p2m↵. (9.0.116)
Utilizando las ecuaciones de transformacion se obtiene la solucion encoordenadas polares
8
<
:
r =q
2↵m!2
q
sin2 (!t+ 'x) + sin2 (!t+ 'y)
✓ = tan�1
h
sin(!t+'y
)
sin(!t+'x
)
i (9.0.117)
junto con los momentos
(
pr = mr
p✓ = mr2✓.(9.0.118)
A partir de esta solucion se pueden identificar dos casos particulares deinteres. El caso lineal ocurre cuando las fases son iguales, 'x = 'y = ', conlo cual la solucion del sistema se reduce a
(
r =q
4↵m!2 sin (!t+ ')
✓ = tan�1 [1] = ⇡4
(9.0.119)
junto con los momentos
(
pr =p2m↵ cos (!t+ ')
p✓ = 0.(9.0.120)
En este caso, el movimiento en un diagrama x � y es una linea rectacomo se muestra en la Figura XXXX a.
El segundo caso limite ocurre cuando la diferencia entre las fases es de⇡2
'x = 'y +⇡2
, con lo cual la solucion del sistema es
8
<
:
r =q
2↵m!2 = r
0
✓ = tan�1
h
sin(!t+'y
)
cos(!t+'y
)
i
= tan�1 [tan (!t+ 'y)] = !t+ 'y
(9.0.121)

CAPITULO 9. TEORIA DE HAMILTON-JACOBI 277
junto con los momentos
(
pr = 0
p✓ = mr20
!.(9.0.122)
El movimiento en un diagrama x� y es un circulo de radio r0
como semuestra en la Figura XXXX b.
Para otros valores de la diferencia de fase de las componentes resultaen elipses. Por ejemplo la Figura XXXX c. corresponde al caso en el quela diferencia de fases es de �' = ⇡
4
. Estos casos particulares son algunosejemplos de las famosas Figuras de Lissajous.
9.1. Separacion de Variables
Una variable q1
es separable si la funcion principal de Hamilton se puedeescribir en la forma
S = S1
(q1
,↵1
, t) + S (q2
, q3
, ..., qn,↵, t) (9.1.1)
y la ecuacion de Hamilton-Jacobi se puede separar en dos ecuaciones (una paraS1
y otra para S). Por otro lado, se dice que la ecuacion de Hamilton-Jacobi escompletamente separable si todas las coordenadas del problema son separables,con lo cual la funcion caracterıstica de Hamilton tomara la forma
S =nX
i=1
S (qi,↵1
, ...,↵n, t) (9.1.2)
y por lo tanto la ecuacion de Hamilton-Jacobi se convierte en n-ecuaciones dela forma
Hj
✓
qj ,@Sj
@qj,↵
1
, ...,↵n, t
◆
+@Sj
@t= 0 para j = 1, 2, ..., n. (9.1.3)
9.1.1. Separacion del tiempo
Si el Hamiltoniano no depende explıcitamente del tiempo, para cada una delas contribuciones Sj se tendra
Sj (qj ,↵1
, ...,↵n, t) = Wj (qj ,↵1
, ...,↵n)� ↵jt (9.1.4)
y se tendran n-ecuaciones restringidas de Hamilton-Jacobi,
Hj
✓
qj ,@Sj
@qj,↵
1
, ...,↵n
◆
= ↵j para j = 1, 2, ..., n. (9.1.5)

CAPITULO 9. TEORIA DE HAMILTON-JACOBI 278
Aqui las funciones Hj pueden ser o no Hamiltonianos y las constantes ↵j
pueden ser energias, momentos angulares o diferentes cantidades conservadasde acuerdo con la naturaleza de las coordenadas qj correspondientes.
9.1.2. Separacion de una Coordenada Cıclica
Si la coordenada qk es cıclica (pk = ↵k) y el Hamiltoniano no depende deltiempo explıcitamente, la ecuacion de Hamilton-Jacobi se scribira en la forma
H (q1
, ...qk�1
, qk+1
, ..., qn, p1, ..., pk�1
,↵k, pk+1
, ..., pn) = ↵ (9.1.6)
o
H
✓
q1
, ...qk�1
, qk+1
, ..., qn,@W
@q1
, ...,@W
@qn
◆
= ↵ (9.1.7)
donde
↵k =@W
@qk. (9.1.8)
Separando la coordenada cıclica, escribimos la funcion caracterıstica en laforma
W = Wk (qk,↵) + W (q1
, ...qk�1
, qk+1
, ..., qn,↵) . (9.1.9)
Por lo tanto, de la ecuacion
↵k =@W
@qk=@Wk
@qk(9.1.10)
se tiene que el termino separado es
Wk = ↵kqk (9.1.11)
y con ello la funcion caracterıstica de Hamilton se convierte en
W = ↵kqk + W (q1
, ...qk�1
, qk+1
, ..., qn,↵) (9.1.12)
y la funcion principal de Hamilton sera
S = ↵kqk + W (q1
, ...qk�1
, qk+1
, ..., qn,↵)� ↵t. (9.1.13)
Si todas las coordenadas son cıclicas excepto q1
, la funcion principal deHamilton tomara la forma
S = W (q1
,↵) + ↵2
q2
+ ↵3
q3
+ ...+ ↵nqn � ↵t (9.1.14)
y la unica ecuacion de Hamilton-Jacobi a solucionar sera
H
✓
q1
,@W
@q1
◆
= ↵. (9.1.15)

CAPITULO 9. TEORIA DE HAMILTON-JACOBI 279
EjemploFuerza Central en Coordenadas EsfericasConsideramos una partıcula moviendose bajo la influencia de un poten-
cial central V = V (r). En coordenadas esfericas (r, ✓,�) la energıa cineticatendra la forma
T =1
2mh
r2 + r2✓2 + r2 sin2 ✓�2i
(9.1.16)
y por lo tanto el Lagrangiano es
L = T � V =1
2mh
r2 + r2✓2 + r2 sin2 ✓�2i
� V (r) . (9.1.17)
Los momentos canonicamente conjugados son
8
>
<
>
:
pr = @L@r = mr
p✓ = @L@ ˙✓
= mr2✓
p� = @L@ ˙�
= mr2 sin2 ✓�.
(9.1.18)
Ya que la coordenada � es cıclica, el momento p� es constante y debidoa que en el Lagrangiano no aparece el tiempo explıcitamente la energıageneralizada (en este caso la energıa mecanica total) se conserva. Medianteuna transformacion de Lagrange se obtiene el Hamiltoniano,
H =3
X
i=1
piqi � L (9.1.19)
H =p2rm
+p2✓mr2
+p2�
mr2 sin2 ✓� 1
2mh
r2 + r2✓2 + r2 sin2 ✓�2i
+V (r) (9.1.20)
H =1
2m
"
p2r +p2✓r2
+p2�
r2 sin2 ✓
#
+ V (r) . (9.1.21)
Para escribir la ecuacion de Hamilton-Jacobi en terminos de la funcion Sutilizamos
pi =@S
@qi(9.1.22)
con lo que se obtiene
1
2m
"
✓
@S
@r
◆
2
+1
r2
✓
@S
@✓
◆
2
+1
r2 sin2 ✓
✓
@S
@�
◆
2
#
+V (r)+@S
@t= 0. (9.1.23)

CAPITULO 9. TEORIA DE HAMILTON-JACOBI 280
Ya que la energia se conserva y el momentum p� es constante, propondremosque la funcion principal de Hamilton se puede separar en la forma
S (r, ✓,↵,↵✓, t) = W (r, ✓,�,↵,↵�)� ↵t (9.1.24)
con lo que se tiene
1
2m
"
✓
@W
@r
◆
2
+1
r2
✓
@W
@✓
◆
2
+1
r2 sin2 ✓
✓
@W
@�
◆
2
#
+ V (r) = ↵. (9.1.25)
De esta ecuacion se observa que la constante ↵ se identifica con la energiamecanica total. Por otro lado, la constante ↵� se identificara con el momentoconservado p� a traves de
p� =@S
@�=@W
@�= ↵�, (9.1.26)
y corresponde a la componente `z = ↵� del momento angular. Debido a laexistencia de esta cantidad conservada, la funcion W debe separarse en laforma
W (r, ✓,�,↵,↵�) = W (r, ✓,↵) + ↵�� (9.1.27)
y la ecuacion de Hamilton-Jacobi se convierte en
1
2m
2
4
@W
@r
!
2
+1
r2
@W
@✓
!
2
+↵2
�
r2 sin2 ✓
3
5+ V (r) = ↵. (9.1.28)
Para integrar esta ecuacion, supondremos que la funcion W se puede separaren la forma
W (r, ✓,�,↵,↵�) = Wr (r,↵) +W✓ (✓,↵) + ↵��, (9.1.29)
con lo cual la ecuacion de Hamilton-Jacobi tomara la forma
1
2m
"
✓
@Wr
@r
◆
2
+1
r2
✓
@W✓
@✓
◆
2
+↵2
�
r2 sin2 ✓
#
= ↵� V (r) (9.1.30)
r2✓
@Wr
@r
◆
2
+
✓
@W✓
@✓
◆
2
+↵2
�
sin2 ✓= 2mr2 [↵� V (r)] (9.1.31)
con lo cual separamos las ecuaciones introduciendo una nueva constante

CAPITULO 9. TEORIA DE HAMILTON-JACOBI 281
2mr2 [↵� V (r)]� r2✓
@Wr
@r
◆
2
=
✓
@W✓
@✓
◆
2
+↵2
�
sin2 ✓= �2. (9.1.32)
Integrando estas dos ecuaciones diferenciales se obtiene
Wr =
ˆ r
2m [↵� V (r)]� �2
r2dr + constante (9.1.33)
W✓ =
ˆ s
�2 � ↵2
�
sin2 ✓d✓ + constante, (9.1.34)
con lo cual se ha resuelto el problema en forma analıtica. Sin embargo, aunqueda una cantidad conservada que no se ha analizado. Para encontrar-la, consideraremos el movimiento de la particula en el plano de la orbitautilizando las coordenadas polares (r, ). El Hamiltoniano en el espacio,
H =1
2m
"
p2r +p2✓r2
+p2�
r2 sin2 ✓
#
+ V (r) . (9.1.35)
se puede restringir a este plano haciendo la identificacion
p2 = p2✓ +p2�
sin2 ✓(9.1.36)
con lo cual el Hamiltoniano toma la forma usual en coordenadas polaresbi-dimensionales,
H =1
2m
"
p2r +p2 r2
#
+ V (r) . (9.1.37)
Ya que la coordenada es cıclica, su momento conjugado se conserva,
p = ` = p2✓ +↵2
�
sin2 ✓(9.1.38)
y corresponde al momento angular total del sistema.
9.2. Condiciones de Staeckel
9.3. Variables Accion-Angulo
Muchos de los sistemas fısicos importantes en la fısica tiene un compor-tamiento periodico. Para ellos existe una modificacion de la formulacion deHamilton-Jacobi que permite analizarlos elegantemente. La modificacion con-

CAPITULO 9. TEORIA DE HAMILTON-JACOBI 282
siste en definir unas nuevas constantes Ji las cuales forman un conjunto de nfunciones independientes de las cantidades conservadas ↵i.
9.3.1. Sistemas de un Grado de Libertad
Para comprender el procedimiento de las variables accion-angulo conside-raremos un sistema fısico de un solo grado de libertad, n = 1, para el cual elHamiltoniano no depende explıcitamente del tiempo,
@H
@t= 0 =) H (q, p) = ↵. (9.3.1)
De esta ecuacion es posible despejar el momentum como la ecuacion
p = p (q,↵) , (9.3.2)
la cual describe la trayectoria seguida por el sistema en el espacio de fase bi-dimensional p � q para un valor constante del Hamiltoniano H = ↵. La formade esta curva en el espacio de fase permite distinguir dos clases de movimientoperiodico:
1. Si la orbita es cerrada (ver Fig. XXXa), el punto que describe el sistematraza la misma curva una y otra vez en forma perodica. Por esta razon, lasfunciones q y p son tambien funciones periodicas en el tiempo con la mismafrecuencia. Este tipo de movimiento recibe el nombre astronomico de Libraciony un ejemplo es el oscilador armonico unidimensional.
2. La segunda clase de movimiento periodico es aquel en el cual p presentauna orbita en el espacio de fase que es una funcion periodica de la variable qy con un cierto periodo q
0
(ver Fig. XXXb). Este tipo de movimiento recibeel nombre de Rotacion y el ejemplo mas familiar es el de un pendulo fısico(cuerpo rıgido rotando alrededor de un eje fijo) donde el angulo de rotacion esla corodenada generalizada q y el periodo es q
0
= 2⇡.
EjemploPendulo SimpleEl Hamiltoniano que describe un pendulo simple es
H =p2✓
2ml2�mgl cos ✓ = E (9.3.3)
de donde el momentum se puede escribir como
p✓ = ±p
2ml2 (E +mgl cos ✓). (9.3.4)
El comportamiento de esta funcion en el espacio de fase p✓ � ✓ depende delvalor de la energıa mecanica total E.

CAPITULO 9. TEORIA DE HAMILTON-JACOBI 283
a) Si E < mgl se tiene que el valor de la coordenada ✓ esta acotado porla condicioncos ✓ � � E
mgl . Es decir que la coordenada ✓ solo puede tomarvalores en el rango
�✓m ✓ ✓mcon ✓m dado por
cos ✓m =E
mgl. (9.3.5)
Esto quiere decir que el pendulo oscila entre los angulos �✓m y ✓m, elcual es un movimiento periodico de Libracion, como se puede observar enla Figura XXXXX.
b) Si E > mgl se tiene que la coordenada ✓ puede tomar todos losvalores posibles, incrementandose sin limite. Fısicamente, este pendulotiene una energıa tan grande que pasa por la posicion vertical ✓ = ⇡ ycontinua girando. El movimiento producido es del tipo Rotacion
c) El caso crıtico E = mgl es aquel en el que el pendulo llega hasta laposicion vertical ✓ = ⇡ sin energıa cinetica, es decir que allı p✓ = 0. Estees un punto de equilibrio inestable y cualquier perturbacion puede llevar elsistema al movimiento de libracion o rotacion.
Esto sucede porque el punto de coordenadas ✓ = ⇡, p✓ = 0 es un puntode silla en el cual se cruzan dos trajectorias de E constante (punto debifurcacion).
Para cualquiera de los dos tipos de movimiento periodico, se introduce unanueva variable
J =
˛pdq (9.3.6)
de donde se observa que posee dimensiones de [J ] = momento angular, por locual se denomina variable accion. En esta definicion la integracion se realizasobre un periodo completo de libracion o de rotacion, segun sea el caso. Alintegrar el momentum con respecto a q, se obtiene una funcion exclusivamentede ↵,
J = J (↵) (9.3.7)
y al invertir esta relacion se tendra
↵ = ↵ (J) (9.3.8)
con lo que podemos concluir que el Hamiltoniano es una funcion de la variableaccion,
↵ = H = H (J) . (9.3.9)

CAPITULO 9. TEORIA DE HAMILTON-JACOBI 284
Si se identifica el nuevo momentum como
P = J, (9.3.10)
la funcion caracterısitica de Hamilton se podra escribir como
W = W (q, J) (9.3.11)
y la funcion caracterıstica de Hamilton como
S = W (q, J)� ↵ (J) t. (9.3.12)
La coordenada generalizada conjugada a J se conoce como variable angulo$ y esta definida por
$ =@W
@J. (9.3.13)
Su ecuacion de movimiento sera
$ =@H
@J= ⌫ (J) . (9.3.14)
Por otra parte, la nueva coordenada Q esta dada por
Q = � =@S
@P=@S
@J(9.3.15)
que en este caso resulta se
� =@W
@J�✓
@↵
@J
◆
t (9.3.16)
� = $ � ⌫ (J) t (9.3.17)
donde se ha utilizado
⌫ (J) =@H
@J=@↵
@J. (9.3.18)
Por lo tanto se tiene la expresion para la variable angulo
$ = ⌫t+ �. (9.3.19)
La importancia de estas definiciones radica en la interpretacion fısica quese le puede dar a la cantidad ⌫. Para comprenderlo, consideremos el cambioque sufre la variable angulo cuando q completa un ciclo completo de libracion orotacion,
�$ =
˛@$
@qdq (9.3.20)
�$ =
˛@
@q
✓
@W
@J
◆
dq. (9.3.21)

CAPITULO 9. TEORIA DE HAMILTON-JACOBI 285
Ya que J es constante, la derivada correspondiente puede salir de la integral,
�$ =d
dJ
˛@W
@qdq =
d
dJ
˛pdq =
d
dJ(J) = 1. (9.3.22)
Esta ecuacion establece que $ cambia en una unidad cuando q completa unperiodo completo. Sin embargo, de la ecuacion (9.3.19) se nota que si ⌧ es elperiodo para un ciclo completo en la variable q entonces
�$ = ⌫⌧ = 1, (9.3.23)
de donde
⌫ =1
⌧. (9.3.24)
Por lo tanto, la constante ⌫ es identificada con la frecuencia asociada almovimiento periodico de q, y el metodo de las variables accion-angulo permitenecontrar esta frecuencia de una forma simple sin necesidad de encontrar lasolucion completa del problema.
EjemploOscilador Armonico SimpleEl Hamiltoniano que describe un oscilador armonico simple es
H =1
2m
⇥
p2 +m2!2q2⇤
= E (9.3.25)
donde !2 = km . El momentum se puede escribir como
p =p
2m (E �m2!2q2) (9.3.26)
y con ello definimos la variable accion como
J =
˛p
2m (E �m2!2q2)dq (9.3.27)
J =p2mE
˛ r
1� m!2
2Eq2dq. (9.3.28)
Para integrar esta expresion realizamos el cambio de variable
sin� =
r
m!2
2Eq (9.3.29)
de donde
cos�d� =
r
m!2
2Edq. (9.3.30)
Ası, la integral se convierte en

CAPITULO 9. TEORIA DE HAMILTON-JACOBI 286
J =p2mE
r
2E
m!2
ˆ2⇡
0
q
1� sin2 �d� (9.3.31)
J =2E
!
ˆ2⇡
0
cos2 �d�. (9.3.32)
Notese que la integracion en un ciclo completo de la coordenada q se con-vierte ahora en una integral sobre el periodo del angulo �. Esta integral esinmediata,
J =2E
!
�
2+
sin (2�)
4
�
2⇡
0
=2E
!
2⇡
2+
sin 4⇡
4� sin 0
4
�
(9.3.33)
J =2⇡E
!, (9.3.34)
con lo que la energıa se puede escribir como
E =J!
2⇡= H = ↵ (J) . (9.3.35)
Derivando esta expresion obtenemos la frecuencia de movimiento delsistema,
⌫ =@H
@J=
!
2⇡. (9.3.36)
La variable angulo esta dada por
$ = ⌫t+ � =!
2⇡t+ � (9.3.37)
es decir que tenemos
2⇡$ = !t+ 2⇡� (9.3.38)
2⇡$ = !t+ '. (9.3.39)
De esta forma, la solucion completa del problema obtenida en las ecua-ciones (9.0.80) y (9.0.86)
(
q =q
2↵m!2 sin (!t+ !�)
p =p2m↵ cos (!t+ ')
(9.3.40)
puede ser escrita en terminos de las variables accion-angulo como
8
<
:
q =q
J⇡m! sin 2⇡$
p =q
Jm!⇡ cos 2⇡$.
(9.3.41)

CAPITULO 9. TEORIA DE HAMILTON-JACOBI 287
Por otro lado, estos resultados tambien nos dan informacion acerca dela trayectoria del sistema en el espacio de fase. Para ello considerese laecuacion de la energıa
H =1
2m
⇥
p2 +m2!2q2⇤
= ↵ (9.3.42)
p2
2m↵+
m!2q2
2↵= 1 (9.3.43)
q2�
2↵m!2
� +p2
(2m↵)= 1 (9.3.44)
la cual claramente representa una elipse en el espacio de fase
q2
a2+
p2
b2= 1 (9.3.45)
con
a =
r
2↵
m!2
(9.3.46)
b =p2m↵. (9.3.47)
Finalmente, es muy interesante calcular el area de esta elipse, la cual estadada por
Area de la Elipse = ⇡ab = ⇡
r
2↵
m!2
p2m↵ (9.3.48)
Area de la Elipse = ⇡ab =2⇡↵
!(9.3.49)
Area de la Elipse = ⇡ab = J, (9.3.50)
es decir que la variable accion corresponde al area encerrada por la curvaen el espacio de fase (lo cual es trivial al ver su definicion en forma de unaintegral!).
9.3.2. Sistemas de n Grados de Libertad CompletamenteSeparables
Consideremos ahora un sistema fısico de n grados de libertad descrito porun Hamiltoniano independiente del tiempo y cuya ecuacion de Hamilton-Jacobies completamente separable. La funcion principal de Hamilton de este sistemasera

CAPITULO 9. TEORIA DE HAMILTON-JACOBI 288
S = W � ↵t (9.3.51)
con
W =nX
i=1
Wi (qi,↵i) . (9.3.52)
El momento canonicamente conjugado a la coordenada qk esta dado por
pk = pk (qk,↵1
, ...,↵n) =@Wk
@qk. (9.3.53)
En general, los periodos para pk y qk son diferentes. Sin embargo, si losperiodos de todas las funciones en el espacio de fase son iguales o multiplosracionales unos de otros, entonces el movimiento total es periodico. Las variablesaccion se definen en la forma usual
Jk =
˛pkdqk (9.3.54)
y si la coordenada qk es cıclica, su momento conjugado pk es constante. Por lotanto esta integral se puede realizar obteniendo
Jk = pk
˛dqk = pk
ˆ2⇡
0
dqk = 2⇡pk. (9.3.55)
Como puede observarse en la Figura XXXX, la representacion grafica de lavariable accion es el area bajo la curva en el espacio de fase.
Por otro lado, las variables accion tambien pueden escribirse en la forma
Jk =
˛pkdqk =
˛@Wk (qk,↵1
, ...,↵n)
@qkdqk. (9.3.56)
Al integrar sobre la variable qk, solamente quedan las variables ↵i es decirque cada una de las variables accion tiene la dependencia
Jk = Jk (↵1
, ...,↵n) . (9.3.57)
Es decir que estas variables forman un conjunto de n funciones de los ↵y que son independientes de las qi. Por lo tanto estas funciones pueden seridentificadas con el nuevo conjunto de momentos constantes
Pk = Jk. (9.3.58)
De esta forma, la funcion caracterıstica se puede expresar con la dependencia
W = W (q1
, ..., qn, J1, ...., Jn) =nX
j=1
Wj (qj , J1, ..., Jn) (9.3.59)
mientras que el Hamiltoniano tendra la dependencia

CAPITULO 9. TEORIA DE HAMILTON-JACOBI 289
H = ↵ = H (J1
, ..., Jn) . (9.3.60)
En forma similar a lo que se mostro para el caso unidimensional, definimoslas variables angulo en la forma
$k =@W
@Jk=
nX
j=1
@Wj (qj , J1, ..., Jn)
@Jk(9.3.61)
y las ecuaciones de movimiento de estas variables son
$k =@H (J
1
, ..., Jn)
@Jk= ⌫k (J1, ..., Jn) . (9.3.62)
Al igual que en el caso anterior, ya que los ⌫i son constantes esta relacion sepuede integrar y se obtine funciones lineales para las variables angulo,
$k = ⌫kt+ �k. (9.3.63)
Sin embargo es importante notar que cada una de als $i se incrementanen el tiempo con razones diferentes, y cada una de las ⌫i se identifican con lasfrecuencias de cada uno de los movimientos periodicos.
9.4. El Problema de Kepler
H =1
2m
"
p2r +p2✓r2
+p2�
r2 sin2 ✓
#
+ V (r) . (9.4.1)
Para escribir la ecuacion de Hamilton-Jacobi en terminos de la funcion S utili-zamos
pi =@S
@qi(9.4.2)
con lo que se obtiene
1
2m
"
✓
@S
@r
◆
2
+1
r2
✓
@S
@✓
◆
2
+1
r2 sin2 ✓
✓
@S
@�
◆
2
#
+ V (r) +@S
@t= 0. (9.4.3)
Ya que la energia se conserva y el momentum p� es constante, propondremosque la funcion principal de Hamilton se puede separar en la forma
S (r, ✓,↵,↵✓, t) = W (r, ✓,�,↵,↵�)� ↵t (9.4.4)
con lo que se tiene

CAPITULO 9. TEORIA DE HAMILTON-JACOBI 290
1
2m
"
✓
@W
@r
◆
2
+1
r2
✓
@W
@✓
◆
2
+1
r2 sin2 ✓
✓
@W
@�
◆
2
#
+ V (r) = ↵. (9.4.5)
De esta ecuacion se observa que la constante ↵ se identifica con la energiamecanica total. Por otro lado, la constante ↵� se identificara con el momentoconservado p� a traves de
p� =@S
@�=@W
@�= ↵�, (9.4.6)
y corresponde a la componente `z = ↵� del momento angular. Debido a laexistencia de esta cantidad conservada, la funcion W debe separarse en la forma
W (r, ✓,�,↵,↵�) = W (r, ✓,↵) + ↵�� (9.4.7)
y la ecuacion de Hamilton-Jacobi se convierte en
1
2m
2
4
@W
@r
!
2
+1
r2
@W
@✓
!
2
+↵2
�
r2 sin2 ✓
3
5+ V (r) = ↵. (9.4.8)
Para integrar esta ecuacion, supondremos que la funcion W se puede separar enla forma
W (r, ✓,�,↵,↵�) = Wr (r,↵) +W✓ (✓,↵) + ↵��, (9.4.9)
con lo cual la ecuacion de Hamilton-Jacobi tomara la forma
1
2m
"
✓
@Wr
@r
◆
2
+1
r2
✓
@W✓
@✓
◆
2
+↵2
�
r2 sin2 ✓
#
= ↵� V (r) (9.4.10)
r2✓
@Wr
@r
◆
2
+
✓
@W✓
@✓
◆
2
+↵2
�
sin2 ✓= 2mr2 [↵� V (r)] (9.4.11)
con lo cual separamos las ecuaciones introduciendo una nueva constante
2mr2 [↵� V (r)]� r2✓
@Wr
@r
◆
2
=
✓
@W✓
@✓
◆
2
+↵2
�
sin2 ✓= �2. (9.4.12)
Integrando estas dos ecuaciones diferenciales se obtiene
Wr =
ˆ r
2m [↵� V (r)]� �2
r2dr + constante (9.4.13)
W✓ =
ˆ s
�2 � ↵2
�
sin2 ✓d✓ + constante, (9.4.14)
CAPITULO 9. TEORIA DE HAMILTON-JACOBI 291
con lo cual se ha resuelto el problema en forma analıtica. Sin embargo, aunqueda una cantidad conservada que no se ha analizado. Para encontrarla, con-sideraremos el movimiento de la particula en el plano de la orbita utilizando lascoordenadas polares (r, ). El Hamiltoniano en el espacio,
H =1
2m
"
p2r +p2✓r2
+p2�
r2 sin2 ✓
#
+ V (r) . (9.4.15)
se puede restringir a este plano haciendo la identificacion
p2 = p2✓ +p2�
sin2 ✓(9.4.16)
con lo cual el Hamiltoniano toma la forma usual en coordenadas polares bi-dimensionales,
H =1
2m
"
p2r +p2 r2
#
+ V (r) . (9.4.17)
Ya que la coordenada es cıclica, su momento conjugado se conserva,
p = ` = p2✓ +↵2
�
sin2 ✓(9.4.18)
y corresponde al momento angular total del sistema.