marco teÓricovirtual.urbe.edu/tesispub/0105824/cap02.pdfinformación bajo entorno web para el...
TRANSCRIPT

Capítulo II MARCO TEÓRICO
10
10
CAPÍTULO II
MARCO TEÓRICO
En este capítulo se muestra la descripción de elementos teóricos
planteados por diferentes autores y que permite al investigador fundamentar
su proceso de conocimiento a través de la diversidad de definiciones y
desarrollo del tema de estudio.
1. ANTECEDENTES DE LA INVESTIGACIÓN
A continuación se hace referencia a una serie de investigaciones
relativas al tema en cuestión, las cuales muestran una relación con las
variables del proyecto.
En función de ello, se tiene la investigación desarrollada por Jiménez,
Tovar, Vivas, titulado “Sistema de telecomunicaciones inalámbricas para
prestar servicios de voz y GPS a embarcaciones marítimas en el Estado
Zulia”. Elaborado en la Universidad Dr. Rafael Belloso Chacín (2013).
Sustentando las bases teóricas en los principales autores, Trapero (2009),
Crespo (2008), Letham (2006), Ogata (2003) y Randall (2003).
La presente investigación tuvo como objetivo principal el diseño de un
Sistema de telecomunicaciones para prestar servicio de voz y GPS a
embarcaciones marítimas en el estado Zulia. El diseño del sistema está

11
fundamentado a partir de las señales obtenidas del sistema de voz a través
de DMR (Digital Mobile Radio) y Global de Navegación por Satélite (GPS),
con el propósito de sumar apoyo a los sistemas de vigilancia para la
navegación a embarcaciones y control de tráfico marino, complementándose
así los sistemas establecidos por la legislación del Instituto Nacional de
Espacios Acuáticos (INEA) como la Organización Marítima Internacional
(OMI) tomando en cuenta las resoluciones legales de estos organismos.
Los autores utilizaron algunos tipos de investigación como la proyectiva,
descriptiva, documental y no experimental. En cuanto a las técnicas de
recolección de datos se acudió a la entrevista, guía de entrevista y revisión
documental las cuales fueron realizadas en el área de telecomunicaciones.
La metodología utilizada para el diseño se constituyó en cinco fases
utilizando la metodología de Smith y Collins (2007), por medio de ellas se
determinan el análisis de la situación actual, determinación de los
parámetros, la selección de las tecnologías, el diseño y evaluación. Todas
estas fueron importantes y necesarias para el diseño planteado.
Como resultado se logró el diseño factible de un sistema para prestar
servicio de voz y GPS a embarcaciones marítimas del estado Zulia, a través
de una red estructurada por enlaces tierra-mar y mar-tierra implementando el
protocolo DMR de radio móvil. Esta investigación provee un gran aporte a la
investigación actual debido a que presenta un sistema de GPS para las
embarcaciones marítimas la cual se pretende tomar como una fuente de
apoyo para las bases teóricas.

12
Igualmente, en el año 2013 Almao, Ortiz y Sánchez, realizaron una
investigación titulada “Sistema de información bajo entorno web para el
posicionamiento de flota de vehículos en la alcaldía del municipio Tulio
Febres Cordero Estado Mérida”; en la Universidad Dr. Rafael Belloso
Chacín, donde tienen como objetivo general desarrollar un sistema de
información bajo entorno web para el posicionamiento de flota de vehículo en
la alcaldía del municipio Tulio Febres Cordero, fundamentan sus bases
teóricas de los autores Fernández (2006), Powell (2001) y Molina (2006).
De esta manera se plantea una investigación de tipo proyectiva,
descriptiva, de campo y documental con un diseño no experimental, su
población consto de cuatro (4) usuario los cuales fueron los únicos
encargados de interactuar con el sistema.
Así mismo, como instrumentos de recolección de datos se utilizaron:
guía de visitas y guía de observación, para su diseño seleccionaron una
tecnología hibrida utilizando la programación extrema XP y Pressman; la
cual se estructuró en las siguientes cuatro fases: I Planificación del proyecto,
II Diseño, III Codificación y IV Pruebas. Obtuvieron como resultado un
Sistema de Posicionamiento Global adaptado a las necesidades de la
organización.
A su vez partiendo de los resultados de la investigación realizada, se
toma como aporte practico el comportamiento del posicionamiento de flota de
vehículos basado en (GPS) y así mismo algunas de las metodologías
planteadas para el posicionamiento vehicular.

13
Ahora bien, se presenta el estudio realizado por: Becker; Chourio y
Fuenmayor (2014) titulado “Sistema de información para los procesos de
gestión de flujo de camiones a través de GPS en la empresa Transporte
Torres & Roo” en la Universidad Privada Dr. Rafael Belloso Chacín. El
presente estudio se enmarca dentro de los tipos de investigación:
proyectiva, descriptiva, de campo y documental, todas adaptadas a una
serie de criterios establecidos para desarrollar el proyecto.
Además como objetivo general tiene desarrollar un sistema de
información para los proceso de gestión de flujo de camiones a través
de GPS de la empresa Transporte Torres & Roo. Lo antes mencionado
fue sustentado por los autores: Peña (2006), García (2008).
Abarcando el tema de población para la actual investigación se
evaluaron los clientes de la empresa Transporte Torres & Roo, no
obstante, dicha organización recolecta basura en diversas zonas, por lo
tanto se seleccionó un muestreo intencional de 60 beneficiarios bajo los
criterios de inclusión: personas beneficiarias del servicio, individuos
residenciados en el municipio Maracaibo, representando de esta manera a la
población objeto de estudio.
Para la técnica de recolección de datos se realizó una entrevista para
conocer las expectativas de la vicepresidente en relación a
sistema de información propuesto y una explicación amplia de los
procesos llevados a cabo dentro de la empresa transporte Torres &
Roo, se reconoció la estructura organizacional de esta, igualmente se
14
efectuó un cuestionario a los empleados de la organización conociendo
de esta manera sus puntos de vista acerca de las actividades y el
servicio prestado.
En la investigación anteriormente mencionada se ha desarrollado e
investigado un proceso de gestión de flujo de camiones a través de
GPS lo cual brinda una fuente importante de información sobre la tecnología
GPS que puede ser de gran utilidad en el presente proyecto.
Se presenta el estudio realizado por Chang, Lozano (2013) en la
Universidad Politécnica Salesiana de Ecuador, el cual realizó un trabajo de
investigación titulado “Desarrollo e implementación de un sistema para el
control e inventario continuo, utilizando tecnología RFID, para la
biblioteca de la UPS sede Guayaquil”, está enmarcado en facilitar y
mejorar la gestión bibliotecaria, además de evitar las pérdidas de los
materiales de estudios los cuales son fuentes importantes de consulta para
los alumnos. Un nuevo y moderno sistema de gestión para préstamos,
control de inventario, ingreso de nueva tesis, control de salidas no
autorizadas, todo realizado mediante comunicaciones inalámbricas por radio
frecuencia.
El objetivo general estuvo enfocado en diseñar un sistema de control
para la gestión bibliotecaria y prevención de fugas no deseadas de los
documentos de tesis en la UPS-G, utilizando tecnología RFID; de tal forma
que se pueda llevar un inventario permanente de todos los eventos y se
minimicen las pérdidas de estos textos mediante un sistema de alarma. Lo
15
antes mencionado será sustentado por los autores: Glover, Bill y Godínez,
Miguel.
Para esta investigación se tomó una muestra de la población estudiantil
de 200 alumnos que entran y salen de la biblioteca diariamente. La
metodología de diseño estuvo basada en dos métodos: el inductivo debido a
que existían fugas de tesis en la biblioteca en al menos un caso, por lo cual
se planteó la posibilidad de minimizar estas pérdidas por medio de un
sistema de control y el deductivo, ya que el sistema funciona para las tesis,
también se puede aplicar a todos los libros y demás materiales didácticos de
la biblioteca.
El tipo de investigación utilizada fue la experimental de manera que se
obtuvieron resultados efectivos de las pruebas para detectar salidas
indeseadas de los tags. La técnica utilizada para la recolección de datos
estuvo basada en entrevistas al personal de la biblioteca para partir de la
forma en la que ellos desarrollaban su trabajo y utilizar los mismos
parámetros de registro, formatos, codificaciones para que el sistema les
resulte lo más familiar y amigable posible.
En la misma se investigó las diferentes etiquetas o tags del RFID, lo
cual aporta una amplia fuente de información para el presente proyecto, ya
que se podrán sustentar las bases teóricas a través de dicha investigación.
Continuando con la exposición de los antecedentes, en el año 2015
Gutiérrez, Martínez y Monasterios, su investigación fue nombrada “Sistema
de monitoreo basado en la tecnología RFID (Radio Frecuency

16
Identification) para entidades bancarias en Maracaibo Edo. Zulia”; en la
Universidad Dr. Rafael Belloso Chacín, la finalidad de esta investigación fue
el diseño de un sistema de monitoreo y control para el acceso de personal
basado en la tecnología RFID (Radio Frecuency Identification) para
entidades bancarias en Maracaibo Edo. Zulia, sustentando sus bases
teóricas en los autores, Torres, Levachkine, Monero y Quintero (2007), Dorf
(1993), Ogata (2004), Gidekel (2006) y Portillo (2008).
El tipo de investigación se clasificó como proyectiva, descriptiva, de
campo y documental; con un diseño no experimental y de carácter
bibliográfico. Su población es finita, y estuvo integrada por 60 empleados de
las diferentes instituciones bancarias entre los cuales se encuentran
gerentes, sub gerentes, ejecutivos de negocios, tesoreros, promotores,
cajeros y asistentes.
En cuanto a las técnicas de recolección de datos utilizaron la
observación directa, la entrevista, la encuesta y la revisión documental. La
metodología utilizada para el desarrollo del sistema de monitoreo y control
para el acceso de personal basado en la tecnología RFID fue hibrida en las
que se tomaron las 3 primeras fases de Fitzgerald (1981) llamadas, definir el
problema, definir los requerimientos del sistema propuesto y diseñar el
sistema propuesto de comunicación de datos.
Finalmente, sus principales conclusiones obtuvieron que el sistema de
monitoreo se adapta y cubre las necesidades de las entidades bancarias.
Cumpliendo los objetivos de la investigación. Este trabajo especial de grado

17
dio aportes significativos, sirvió como guía para las bases teóricas, así como
también dio nociones de la estructura y los equipos necesarios para
implementar un sistema RFID.
Del mismo modo, en el año 2014 Puente, Jesús realizó una
investigación la cual llevo por título “Sistema de optimización de la cadena
de suministro de droguerías mediante el uso de tecnología RFID” en la
Universidad Privada Dr. Rafael Belloso Chacín. La presente investigación
se considera de tipo descriptivo ya que, la investigación descriptiva
busca especificar propiedades, características y rasgos importantes de
cualquier hecho o situación. Presenta como objetivo general propone el
uso de la tecnología RFID para la optimización de la cadena de
suministros de Corporación Drolanca. Lo antes mencionado será sustentado
por el autor: Godínez, Miguel.
Asimismo tomando en cuenta el propósito de la investigación, la
población del presente estudio estará constituida por un total de tres
(03) individuos, pertenecientes al personal directivo de la Corporación
Drolanca, los cuales fueron considerados como informantes claves para
el presente estudio.
Se utilizó como método para la recolección de la información el método
inductivo, definido por Finol y Camacho (2006) como el proceso a través del
cual se obtiene información de la realidad observando casos particulares,
con el propósito de llegar a premisas generales que puedan ser aplicadas
a situaciones similares a la estudiada.

18
En dicha investigación, se implementó el uso de la tecnología RFID
para la optimización de la cadena de suministros de Corporación Drolanca;
estos avances teóricos brindan una sólida base teórica para el presente
proyecto de investigación porque presenta la variable RFID tecnología con la
que se trabajara en el presente trabajo especial de grado.
2. BASES TEÓRICAS
Se desarrollará conceptualmente en base a los autores pertinentes
todos los ítems necesarios para sustentar la presente investigación, con
autores especializados en las variables a tratar.
2.1. SISTEMA
Según Senn (2005, p. 19), un sistema es un conjunto de componentes
que interaccionan entre sí para lograr un objetivo común. Aunque existe una
gran variedad de sistemas, la mayoría de ellos puede representarse a través
de un modelo formado por 5 bloques básicos: Elemento de entrada,
elementos de salida, sección de transformación, mecanismo de control y
objetivos.
Montilva (1999, p. 17) define a un sistema como conjunto de dos o más
elementos independientes, que pueden corresponder a conceptos, objetos,
eventos u otros renglones, los cuales se interrelacionan para conformar un
todo. Asimismo, señala a un sistema como un conjunto de elementos
interdependientes e interactuantes, formando grupos de unidades

19
combinadas como un todo organizado, cuyo resultado obtenido es mayor y
mejor al resultado que las unidades podrían tener si funcionaran
dependientes.
Realizando un análisis de los autores citados, se puede concluir que un
sistema es la combinación de componentes que interactúan en conjunto y
cumplen un determinado objetivo.
2.1.1. CARACTERISTICAS DE UN SISTEMA
Según Bertalanffy (1998, p. 20) un sistema repone a los conceptos de:
Propósito u objetivo: Las unidades u elementos, así como las
relaciones, definen una distribución que trata de alcanzar un objetivo.
Globalismo: Todo sistema tiene naturaleza orgánica; cualquier
estimulo en cualquier unidad del sistema afectara a todas las demás
unidades debido a la relación existente entre ellas.
Entropía: Tendencia que tienen los sistemas al desgaste o
desintegración, es decir, a medida que la entropía aumenta los sistemas se
descomponen en estados más simples.
Homeostasis: Equilibrio dinámico entre las partes del sistema, esto
es, la tendencia de los sistemas a adaptarse con el equilibrio de los cambios
internos y externos del ambiente.
Equifinalidad: Se refiere al hecho de un sistema vivo a partir de
distancias condiciones iniciales y por distintos caminos llega a un mismo
estado final. No importa el proceso que reciba, el resultado es el mismo.

20
2.1.2. CLASIFICACIÓN DE LOS SISTEMAS
Según Montilva (1999, p. 19). Existe una gran variedad de sistemas y
una amplia gama de tipologías para clasificarlos, de acuerdo con ciertas
características básicas. Sin embargo, en cuanto a su constitución, los
sistemas pueden ser físicos o abstractos.
2.1.2.1. SISTEMAS FÍSICOS O CONCRETOS
Cuando están compuestos por equipos, maquinaria, objetos y cosas
reales. Pueden ser descritos en términos cuantitativos de desempeño.
2.1.2.2. SISTEMAS ABSTRACTOS
Cuando están compuestos por conceptos, planes, hipótesis e ideas.
Aquí, los símbolos representan atributos y objetos, que muchas veces solo
existen en el pensamiento de las personas.
2.1.2.3. EN CUANTO A SU NATURALEZA
Los sistemas pueden ser Cerrados o abiertos:
Sistemas cerrados
Son los sistemas que no presentan intercambio con el medio ambiente
que los rodea, pues son herméticos a cualquiera influencia ambiental. Así,
los sistemas cerrados no reciben ninguna influencia del ambiente, y por otro
lado tampoco influencian al ambiente.
21
Sistemas abiertos
Son los sistemas que presentan relaciones de intercambio con el
ambiente, a través de entradas y salidas. Los sistemas abiertos intercambian
materia y energía regularmente con el medio ambiente. Son eminentemente
adaptativos, esto es, que para sobrevivir debe reajustarse constantemente a
las condiciones del medio.
Según Senn (1999, p. 21). Mantienen un juego recíproco con las
fuerzas del ambiente y la calidad de su estructura es óptima cuando el
conjunto de elementos del sistema se organiza, aproximadamente a una
operación adaptativa. La adaptabilidad es un continuo proceso de
aprendizaje y de auto-organización. Los sistemas abiertos no pueden vivir
aislados. A través de la interacción ambiental, los sistemas abiertos restauran
su propia energía y reparan perdidas en su propia organización.
2.2. SISTEMA DE POSICIONAMIENTO GLOBAL (GPS)
Según Huerta, Mangiaterra y Noguerra (2005, p. 2). Explican que el
GPS es un sistema que tiene como objetivo la determinación de las
coordenadas espaciales de puntos respecto de un sistema de referencia
mundial. Los puntos pueden estar ubicados en cualquier lugar del planeta,
pueden permanecer estáticos o en movimiento y las observaciones pueden
realizarse en cualquier momento del día.
Para la obtención de coordenadas el sistema se basa en la
determinación simultánea de las distancias a cuatro satélites (como mínimo)
de coordenadas conocidas. Estas distancias se obtienen a partir de las
22
señales emitidas por los satélites, las que son recibidas por receptores
especialmente diseñados. Las coordenadas de los satélites son provistas al
receptor por el sistema.
2.2.1. HISTORIA
Según el Departamento de la Guajira Rioacha (2007, p. 3) el primer
sistema de navegación basado en satélites y utilizado para la localización de
objetos sobre la superficie terrestre fue llamado TRANSIT (Financiado por la
Fuerza Aérea y la Marina de los Estados Unidos), el cual entró en
funcionamiento en 1965. El sistema TRANSIT estaba constituido por una
constelación de seis satélites en órbita polar baja, a una altura de 1074 Km y
los datos obtenidos eran bidimensionales (Latitud, Longitud).
Tal configuración conseguía una cobertura mundial pero el
inconveniente principal de este sistema era la medida lenta y su paso sobre
el objeto de estudio era de mínimo 30 minutos. Por este motivo, este sistema
no era válido para vehículos móviles como aviones, mísiles, etc.
A pesar de lo anterior, el sistema tuvo un gran éxito y ello motivo a
producir diferentes experimentos como el Timation (Bidimensional pero con
mejor precisión temporal y financiado por la marina de los Estados Unidos) y
el sistema 621B (Tridimensional y financiado por la Fuerza Aérea de los
Estados Unidos) en desiertos simulando diferentes comportamientos. En
1973 el departamento de Defensa de Estados Unidos consolidó los
programas Timation y 621B en un único sistema llamado NAVSTAR Global
Positioning System el 17 de agosto de 1974.

23
2.2.2. FUNCIONAMIENTO GPS
El Departamento de la Guajira Riohacha (2007, p.3) explica el
funcionamiento del GPS de la siguiente manera, Los 5 pasos principales, en
los cuales se resume el funcionamiento del sistema GPS son:
Triangulación: La base del GPS es la "triangulación" desde los
satélites.
Distancias: Para "triangular", el receptor de GPS mide distancias
utilizando el tiempo de viaje de señales de radio.
Tiempo: Para medir el tiempo de viaje de estas señales, el GPS
necesita un control muy estricto del tiempo y lo logra con ciertos trucos.
Posición: Además de la distancia, el GPS necesita conocer
exactamente donde se encuentran los satélites en el espacio. Orbitas de
mucha altura y cuidadoso monitoreo, le permiten hacerlo.
Corrección: Finalmente el GPS debe corregir cualquier demora en el
tiempo de viaje de la señal que esta pueda sufrir mientras atraviesa la
atmósfera.
2.2.3. TRIANGULACIÓN DESDE LOS SATÉLITES
Según el Departamento de la Guajira Rioacha (2007, p.5), la idea
general detrás del GPS es utilizar los satélites en el espacio como puntos de
referencia para ubicaciones aquí en la tierra. Esto se logra mediante una
muy, pero muy exacta, medición de nuestra distancia hacia al menos tres
24
satélites, lo que nos permite "triangular" nuestra posición en cualquier parte
de la tierra. La gran idea, Geométricamente, es: Suponiendo que se mide la
distancia al primer satélite y resulta ser de 11.000 millas (20.000 Km).
Sabiendo que se está a 11.000 millas de un satélite determinado, no se
puede por lo tanto estar en cualquier punto del universo, sino que esto limita
la posición a la superficie de una esfera que tiene como centro dicho satélite
y cuyo radio es de 11.000 millas.
A continuación, se mide la distancia a un segundo satélite y se obtiene
que se encuentre a 12.000 millas del mismo. Lo anterior indica que no está
solamente en la primera esfera, correspondiente al primer satélite, sino
también sobre otra esfera que se encuentra a 12.000 millas del segundo
satélite. En otras palabras, en algún lugar de la circunferencia que resulta de
la intersección de las dos esferas. Ahora, si se mide la distancia a un tercer
satélite y se obtiene una distancia de 13.000 millas del mismo, esto limita aún
más la posición, a los dos puntos en los cuales la esfera de 13.000 millas
corta la circunferencia que resulta de la intersección de las dos primeras
esferas.
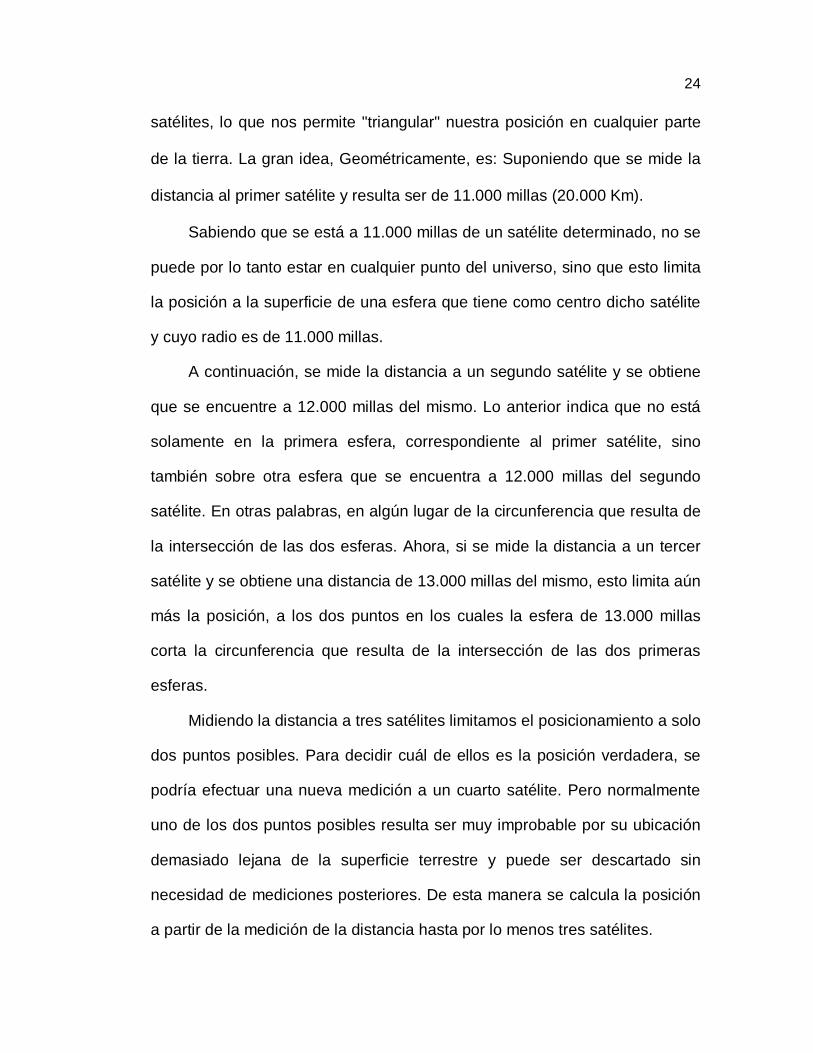
Midiendo la distancia a tres satélites limitamos el posicionamiento a solo
dos puntos posibles. Para decidir cuál de ellos es la posición verdadera, se
podría efectuar una nueva medición a un cuarto satélite. Pero normalmente
uno de los dos puntos posibles resulta ser muy improbable por su ubicación
demasiado lejana de la superficie terrestre y puede ser descartado sin
necesidad de mediciones posteriores. De esta manera se calcula la posición
a partir de la medición de la distancia hasta por lo menos tres satélites.

25
Figura 1. Triangulación desde los satélites
Fuente: Departamento de la Guajira Rioacha (2007)
2.2.4. CÁLCULO DE LAS DISTANCIAS A LOS SATÉLITES
Según el Departamento de la Guajira Rioacha (2007, p.7), es posible
medir la distancia hacia algo que está flotando en algún lugar en el espacio,
porque se mide el tiempo que tarda una señal emitida por el satélite en llegar
hasta el receptor de GPS. (En Tierra) Matemáticamente, es basarse en la
ecuación de la velocidad: "Si un auto viaja a 40 kilómetros por hora durante 3
horas, ¿qué distancia recorrió? Velocidad (40 km/h) x Tiempo (3 horas) =
Distancia (120 km).
En el caso del GPS se está midiendo una señal de radio, que viaja a la
velocidad de la luz, alrededor de 300.000 km por segundo. Entonces el
problema de medir el tiempo de viaje de la señal es en lo que se basa el
sistema. Sin embargo, la medición de ese tiempo es compleja debido a que
los tiempos son extremadamente cortos.
Si el satélite estuviera justo sobre una persona, a unos 20.000 km de
altura, el tiempo total de viaje de la señal hacia dicha persona sería de algo
más de 0.06 segundos. Por esta razón se necesitan relojes muy precisos.
Pero, aun admitiendo que se tiene relojes con la suficiente precisión,
26
Supóngase que el GPS, por un lado, y el satélite, por otro, generan una señal
auditiva en el mismo instante exacto.
Supóngase también que una persona, parada al lado del receptor de
GPS, pueda oír ambas señales. (Es imposible "oír" esas señales porque el
sonido no se propaga en el vacío) La persona oiría dos versiones de la señal.
Una de ellas inmediatamente, la generada por nuestro receptor GPS y la otra
con cierto atraso, la proveniente del satélite, porque tuvo que recorrer
alrededor de 20.000 km para llegar hasta el observador. Por tal motivo, se
puede decir que las señales no están sincronizadas.
B, C, A Punto de intersección, si se quisiera saber cuál es la magnitud
de la demora de la señal proveniente del satélite se puede retardar la
emisión de la señal del receptor GPS hasta lograr la perfecta sincronización
con la señal que viene del satélite. El tiempo de retardo necesario para
sincronizar ambas señales es igual al tiempo de viaje de la señal proveniente
del satélite. Supóngase que sea de 0.06 segundos. Conociendo este tiempo,
se multiplica por la velocidad de la luz y se obtiene la distancia hasta el
satélite. Tiempo de retardo (0.06 seg) x Vel. De la luz (300.000 km/seg) =
Dist. (18.000 km) Así es, básicamente, cómo funciona el GPS.
Tiempo de Retardo = Tiempo de viaje de la señal del satélite La señal
emitida por el receptor GPS y por el satélite es algo llamado "Código Pseudo
Aleatorio" (Pseudo RandomCode). La palabra "Aleatorio" significa algo
generado por el azar. Este Código Pseudo Aleatorio es una parte
fundamental del GPS. Físicamente solo se trata de una secuencia o código
27
digital muy complicado. O sea una señal que contiene una sucesión muy
complicada de pulsos "on" y "off".
La señal es tan complicada que casi parece un ruido eléctrico generado
por el azar. De allí su denominación de "Pseudo-Aleatorio". Hay varias y muy
buenas razones para tal complejidad.
La complejidad del código ayuda a asegurarse que el receptor de GPS
no se sintonice accidentalmente con alguna otra señal. Siendo el modelo tan
complejo es altamente improbable que una señal cualquiera pueda tener
exactamente la misma secuencia. Dado que cada uno de los satélites tiene
su propio y único Código Pseudo Aleatorio, esta complejidad también
garantiza que el receptor no se confunda accidentalmente de satélite. De esa
manera, también es posible que todos los satélites trasmitan en la misma
frecuencia sin interferirse mutuamente.
Esto también complica a cualquiera que intente interferir el sistema
desde el exterior al mismo. El Código Pseudo Aleatorio le da la posibilidad al
Departamento de Defensa de EEUU de controlar el acceso al sistema GPS.
Pero hay otra razón para la complejidad del Código Pseudo Aleatorio: es
crucial para conseguir un sistema GPS económico. El código permite el uso
de la "teoría de la información" para amplificar las señales de GPS. Por esa
razón las débiles señales emitidas por los satélites pueden ser captadas por
los receptores de GPS sin el uso de grandes antenas. Cuando se explica el
mecanismo de emisión de las señales por el GPS y el satélite, se asume que
ambos comienzan la emisión de la señal exactamente al mismo tiempo.

28
2.2.5. CONTROL PERFECTO DEL TIEMPO
Según lo expuesto por el Departamento de la Guajira Rioacha (2007,
p.9), Si la medición del tiempo de viaje de una señal de radio es clave para el
GPS, los relojes que se emplean deben ser exactísimos, dado que si miden
con un desvío de un milésimo de segundo, a la velocidad de la luz, ello se
traduce en un error de 300 km.
Por el lado de los satélites, la coordinación (Timing) es casi perfecta
porque llevan a bordo relojes atómicos de increíble precisión. Sin embargo,
los receptores GPS no alojan relojes atómicos porque eso haría a la
tecnología inasequible. (Los relojes tienen un precio alrededor de los 100.000
U$S) Los diseñadores encontraron una solución que permite resolver el
problema con relojes mucho menos precisos en los receptores GPS. Esta
solución es uno de los elementos clave del sistema GPS y, como beneficio
adicional, significa que cada receptor de GPS es en esencia un reloj atómico
por su precisión.
El secreto para obtener un timing tan perfecto es efectuar una medición
satelital adicional. Resulta que si tres mediciones perfectas pueden
posicionar un punto en un espacio tridimensional, cuatro mediciones
imperfectas pueden lograr lo mismo. Esta idea es fundamental para el
funcionamiento del sistema GPS, pero su explicación detallada excede los
alcances de la presente exposición.
De todos modos, aquí va un resumen somero: Una medición adicional
remedia el desfase del timing. Si todo fuera perfecto (es decir que los relojes
29
de los receptores GPS lo fueran), entonces todos los rangos (distancias) a
los satélites se interceptarían en un único punto (que indica nuestra
posición). Pero con relojes imperfectos, una cuarta medición, efectuada como
control cruzado, no interceptara con los tres primeros. De esa manera la
computadora del receptor GPS detectará la discrepancia y atribuirá la
diferencia a una sincronización imperfecta con la hora universal.
Dado que cualquier discrepancia con la hora universal afectará a las
cuatro mediciones, el receptor buscará un factor de corrección único que
siendo aplicado a sus mediciones de tiempo hará que los rangos coincidan
en un solo punto.
Dicha corrección permitirá al reloj del receptor ajustarse nuevamente a
la hora universal y de esa manera tenemos un reloj atómico en la palma de la
mano.
Una vez que el receptor de GPS aplica dicha corrección al resto de sus
mediciones, obtenemos un posicionamiento preciso. Una consecuencia de
este principio es que cualquier GPS básico debe ser capaz de sintonizar al
menos cuatro satélites de manera simultánea. En la práctica, casi todos los
GPS en venta actualmente, acceden a más de 6, y hasta a 12, satélites
simultáneamente. Ahora bien, con el Código Pseudo Aleatorio como un pulso
confiable para asegurar la medición correcta del tiempo de la señal y la
medición adicional como elemento de sincronización con la hora
universal, se tiene todo lo necesario para medir la distancia a un satélite en el
espacio.

30
Pero, para que la triangulación funcione se necesita conocer no sólo la
distancia sino que se debe conocer dónde están los satélites con toda
exactitud. En resumen: Un timing muy preciso es clave para medir la
distancia a los satélites, los satélites son exactos porque llevan un reloj
atómico a bordo, los relojes de los receptores GPS no necesitan ser tan
exactos porque la medición de un rango a un satélite adicional permite
corregir los errores de medición.
2.2.6. UBICACIÓN DE LOS SATÉLITES
El Departamento de la Guajira Rioacha (2007, p. 12), en el espacio a lo
largo de este trabajo se ha asumido que se conocen dónde están los
satélites en sus órbitas y de esa manera se pueden utilizar como puntos de
referencia. Todos ellos están flotando a unos 20.000 km de altura en el
espacio aproximadamente. Un satélite a gran altura se mantiene estable. La
altura de 20.000 km es en realidad un gran beneficio para este caso, porque
algo que está a esa altura está bien despejado de la atmósfera. Eso significa
que orbitará de manera regular y predecible mediante ecuaciones
matemáticas sencillas. La Fuerza Aérea de los EEUU colocó cada satélite de
GPS en una órbita muy precisa, de acuerdo al Plan Maestro de GPS.
En tierra, todos los receptores de GPS tienen un almanaque
programado en sus computadoras que les informan donde está cada satélite
en el espacio, en cada momento. El Control Constante agrega precisión. Las
órbitas básicas son muy exactas pero con el fin de mantenerlas así, los

31
satélites de GPS son monitoreados de manera constante por el
Departamento de Defensa.
2.2.7. COMPONENTES DEL SISTEMA GPS
Ramírez, Bardales (2012, p. 42) El Sistema de Posicionamiento Global
GPS está compuesto por tres segmentos principales, el segmento espacial
que se conoce como constelación NAVSTAR, el segmento de control y el
segmento usuario.
Segmento espacial
El segmento espacial lo conforma una red de 24 satélites en órbita
sobre el globo, a una altura de 20,200 km, con trayectorias sincronizadas
para cubrir toda la superficie de la Tierra. Más concretamente, repartidos en
6 planos orbitales de 4 satélites cada uno. Las órbitas están orientadas de
forma que hay una a nivel del Ecuador, dos órbitas formando 55º con el
Ecuador y las 3 restantes son polares y equidistantes entre sí. Gracias a esta
distribución, se pueden recibir señales de varios satélites desde cualquier
punto de la superficie terrestre.
El ciclo orbital es de medio día exacto (a nivel 44 astronómico) que son
12 horas sidéreas, equivalentes a 11 horas y 56 minutos en nuestra
percepción temporal. La energía eléctrica que requieren para su
funcionamiento la adquieren a partir de dos paneles compuestos de celdas
solares adosadas a sus costados, con una superficie de 7.25m2. Cuando se
desea determinar la posición, el receptor que se utiliza para ello localiza

32
automáticamente como mínimo tres satélites de la red, de los que recibe
unas señales indicando la identificación y la hora del reloj de cada uno de
ellos.
Segmento de control
El sistema de control terrestre, es llamado también Sistema de Control
de Operaciones. En Tierra existen cinco estaciones de seguimiento y control
las cuales están ubicadas en: Colorado Springs (estación de control
principal), Hawaii, Ascención, Diego García y Kwajalein (. Las orbitas de los
satélites no son orbitas fijas pues estas varían debido a factores como el
campo de gravitacional del sol y de la luna, por la presión de la radiación
solar sobre los satélites y la atmosfera misma. La estación de control maestra
calcula, con 46 los datos de las estaciones de seguimiento y control, la
posición real de cada satélite en el espacio así como también la condición de
deterioro que puedan presentar.
Los errores que las estaciones de control corrigen son los llamados
errores de efemérides, o sea evolución orbital de los satélites. Diariamente se
envía información actualizada a cada satélite desde la estación maestra.
Segmento usuario
Este segmento, está conformado por todos los usuarios alrededor del
mundo, civiles o militares. Por medio de receptores GPS los usuarios
podemos recibir señales e información de los satélites y con una
computadora determinar las pseudo-distancias o sea la distancia a los
satélites. El uso civil de la información que se obtiene de los satélites puede

33
tener una variedad de aplicaciones como pueden ser: la construcción de
infraestructura, navegación en general (terrestre, aérea y marina),
levantamientos geodésicos (topográficos y cartográficos), geodinámica y
geofísica, etc. Un receptor GPS se compone de una antena con un
calculador, un reloj de precisión y un decodificador de mensajes.
En el caso de un GPS diferencial (DGPS), este se constituye de un
receptor GPS, Un microprocesador para calcular los errores del sistema GPS
y 48 para generar la estructura del mensaje que se envía a los receptores,
posee un canal de datos unidireccionales hacia los receptores, por lo cual
necesita un transmisor (estación monitora) y por supuesto, el receptor que el
usuario posee para recibir los datos.
2.2.8. RECEPTORES GPS
Según Ramírez, Bardales (2012, p. 39) los diferentes tipos de
receptores que se encuentran disponibles en el mercado para uso civil han
sido desarrollados en las diversas posibilidades de aplicación en lo que al
sector usuario se refiere, según su importancia en el orden de prestación se
presentan los siguientes.
Receptores de navegación
Económicamente son los más cómodos, usualmente son receptores
muy pequeños y portátiles. En su pantalla aparecen las coordenadas en el
sistema WGS-84, aunque algunos presentan la posibilidad de mostrar
coordenadas en el sistema local.
34
Teniendo en cuenta que estos equipos no son aptos para aplicar las
técnicas diferenciales, donde un solo receptor bastaría, la precisión que
pueden alcanzar no sobrepasa los ± 10m. Algunos aparte de presentar las
características ya mencionadas cuentan con la opción de 40
almacenamientos en memoria de datos observados facilitando con esto el
procesamiento posterior de estos. En nuestro país, el Instituto Geográfico y
Catastro Nacional (IGCN) los utiliza en las clasificaciones de campo.
Receptores de posicionamiento mono frecuencia
Este tipo de receptor funciona en modo diferencial donde son utilizados
dos receptores al mismo tiempo. Un receptor es ubicado en un punto con
coordenadas conocidas al cual se le denomina receptor BASE mientras que
el otro receptor se desplaza sobre los puntos que serán medidos, a este se le
llama receptor ROVER o MOVIL.
El receptor base se puede ubicar en un vértice geodésico o hay la
posibilidad también de utilizar una estación CORS a través 41 de sus datos
de Internet. La mono frecuencia significa que el receptor recibe solamente la
onda portadora L1; con esto se pueden resolver ambigüedades menos
potentes. Con un buen receptor de este tipo se puede llegar a precisiones
submétricas en una distancia de 5 a 10 km, entre los dos receptores. En
catastro se utiliza este tipo de receptores en sus mediciones de campo.
Receptores de posicionamiento doble frecuencia
Los receptores geodésicos de doble frecuencia como el que
utilizaremos en el desarrollo de esta tesis, además de poseer las

35
características de los anteriores agregan a la medición la onda portadora L2,
dando un paso más hacia la disminución de errores sistemáticos, en especial
los que se refieren a la dispersión de la señal en la Ionosfera, permitiendo así
alcanzar 42 las mejores precisiones en mediciones con GPS. Este tipo de
receptor está provisto de una antena con un trípode y un colector separado y
enlazado por un cable a la antena.
Su utilidad la encontramos en la densificación geodésica,
levantamientos de detalles, replanteos, control de movimientos tectónicos,
entre otros. Con los mejores equipos de este tipo puede llegarse a obtener
precisiones de hasta ±5mm, ±1ppm. El IGN los utiliza para la densificación
de la red nacional.
2.3. REDES
Según Forouzan (2007, p. 7) una red es un conjunto de dispositivos (a
menudo denominados nodos) conectados por enlaces de un medio físico. Un
nodo puede ser una computadora, una impresora o cualquier otro dispositivo
capaz de enviar y/o recibir datos generados por otros nodos de la red.
2.3.1 TOPOLOGÍA DE REDES
Forouzan (2007, p. 9) el término topología física se refiere a la forma en
que está diseñada la red físicamente. Dos o más dispositivos se conectan a
un enlace; dos o más enlaces forman una topología. La topología de una red
es la representación geométrica de la relación entre todos los enlaces y los

36
dispositivos de los enlazan entre sí (habitualmente denominados nodos).
Hay cuatro posibles topologías básicas: malla, estrella, bus y anillo.
2.3.1.1. TOPOLOGÍA BUS
Un cable largo actúa como una red troncal que conecta todos los
dispositivos en la red los nodos se conectan al bus mediante cables de
conexión (latiguillos) y sondas. Un cable de conexión es una conexión que va
desde el dispositivo al cable principal. Una sonda es un conector que, o bien
se conecta al cable principal, o se pincha en el cable para crear un contacto
con el núcleo metálico. Cuando las señales viajan a través de la red troncal,
parte de su energía se transforma en calor, la señal se debilita a medida que
viaja por el cable. Por esta razón, hay un límite en el número de conexiones
que un bus puede soportar y en la distancia entre estas conexiones.
Entre las ventajas de la topología de bus se incluye la sencillez de
instalación. El cable troncal puede tenderse por el camino más eficiente y,
después, los nodos se pueden conectar al mismo mediante líneas de
conexión de longitud variable. De esta forma se puede conseguir que un bus
use menos cable que una malla, una estrella o una topología en árbol. Por
ejemplo, en una estrella cuatro dispositivos situados en la misma habitación
necesitarían cuatro cables de longitud suficiente para recorrer todo el camino
hasta el concentrador.
Un bus elimina esta redundancia solamente el cable troncal se extiende
por toda la habitación. Cada línea de conexión únicamente tiene que ir hasta

37
el punto de la troncal más cercana. Entre sus desventajas se incluye lo
dificultoso de su reconfiguración y del aislamiento de los fallos.
Habitualmente, los buses se diseñan para tener una eficiencia óptima cuando
se instalan. Por tanto, puede ser difícil añadir nuevos dispositivos.
Como se dijo anteriormente, la reflexión de la señal en los conectores
puede causar degradación de su calidad. Esta degradación se puede
controlar limitando el número y el espacio de los dispositivos conectados a
una determinada longitud de cable. Añadir nuevos dispositivos puede obligar
a modificar o reemplazar el cable troncal.
Además, un fallo o rotura en el cable del bus interrumpe todas las
transmisiones, incluso entre dispositivos que están en la parte de red que no
falla. Esto se debe a que el área dañada refleja las señales hacia la dirección
del origen, creando ruido en ambas direcciones.
Figura 2. Topología bus
Fuente: Añez, Fuenmayor, Ochoa (2017)

38
2.3.1.2. TOPOLOGÍA ESTRELLA
En las topologías en estrella cada dispositivo solamente tiene un
enlace punto a punto dedicado con el controlador central, habitualmente
llamado concentrador. Los dispositivos no están directamente enlazados
entre sí. A diferencia de la topología en malla, la topología en estrella no
permite el tráfico directo de dispositivos. El controlador actúa como un
intercambiador: si un dispositivo quiere enviar datos a otro, envía los datos al
controlador, que los retransmite al dispositivo final. Una topología en estrella
es más barata que una topología en malla. En una estrella, cada dispositivo
necesita solamente un enlace y un puerto de entrada/salida para conectarse
a cualquier número de dispositivos.
Este factor hace que también sea más fácil de instalar y reconfigurar.
Además, es necesario instalar menos cables y la conexión, desconexión y
traslado de dispositivos afecta solamente a una conexión: la que existe entre
el dispositivo y el concentrador. Otra ventaja de esta red es su robustez, si
falla un enlace, solamente este enlace se verá afectado. Todos los demás
enlaces permanecen activos. Este factor permite también identificar y aislar
los fallos de una forma muy sencilla. Mientras funcione el concentrador, se
puede usar como monitor para controlar los posibles problemas de los
enlaces y para puentear los enlaces con defectos.
Una gran desventaja de la topología en estrella es la dependencia que
toda la topología tiene de un punto único, el concentrador. si el concentrador
falla, toda la red muere.

39
Figura 3. Topología estrella
Fuente: Añez, Fuenmayor, Ochoa (2017)
2.3.1.3. TOPOLOGÍA ANILLO
En una topología en anillo cada dispositivo tiene una línea de conexión
dedicada y punto a punto solamente con los dos dispositivos que están a sus
lados. La señal pasa a lo largo del anillo en una dirección, o de dispositivo a
dispositivo, hasta que alcanza su destino. Cada dispositivo del anillo
incorpora un repetidor. Cuando un dispositivo recibe una señal para otro
dispositivo, su repetidor regenera los bits y los retransmite al anillo. Un anillo
es relativamente fácil de instalar y reconfigurar. Cada dispositivo está
enlazado solamente a sus vecinos inmediatos (bien físicos o lógicos).
Para añadir o quitar dispositivos, solamente hay que mover dos
conexiones. Las únicas restricciones están relacionadas con aspectos
del medio físico y el tráfico (máxima longitud del anillo y número de
dispositivos).

40
Además, los fallos se pueden aislar de forma sencilla. Generalmente,
en un anillo hay una señal en circulación continuamente. Si un dispositivo no
recibe una señal en un período de tiempo especificado, puede emitir una
alarma. La alarma alerta al operador de red de la existencia del problema y
de su localización. Sin embargo, el tráfico unidireccional puede ser una
desventaja.
En anillos sencillos, una rotura del anillo (como por ejemplo una
estación inactiva) puede inhabilitar toda la red. Esta debilidad se puede
resolver usando un anillo dual o un conmutador capaz de puentear la rotura.
La topología en anillo fue usada por IBM en sus redes de área local Token
ring. Actualmente, la necesidad de LAN de alta velocidad ha hecho esta
topología menos popular.
Figura 4. Topología anillo Fuente: Añez, Fuenmayor, Ochoa (2017)
41
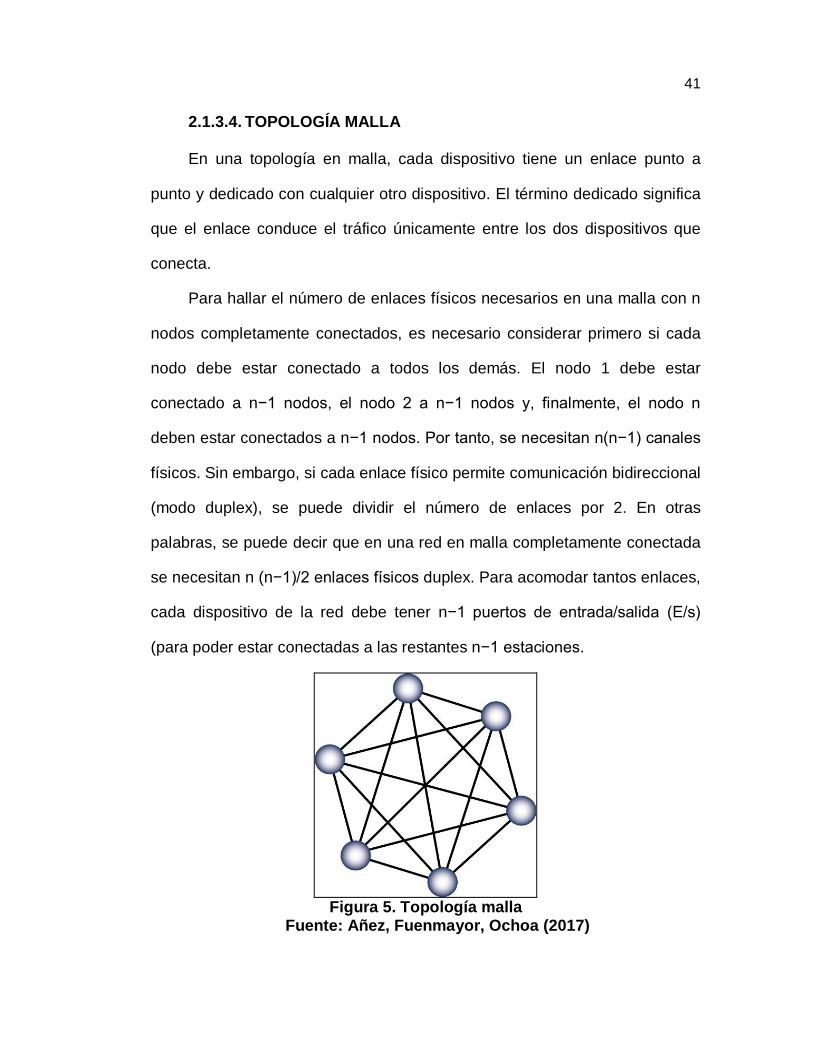
2.1.3.4. TOPOLOGÍA MALLA
En una topología en malla, cada dispositivo tiene un enlace punto a
punto y dedicado con cualquier otro dispositivo. El término dedicado significa
que el enlace conduce el tráfico únicamente entre los dos dispositivos que
conecta.
Para hallar el número de enlaces físicos necesarios en una malla con n
nodos completamente conectados, es necesario considerar primero si cada
nodo debe estar conectado a todos los demás. El nodo 1 debe estar
conectado a n−1 nodos, el nodo 2 a n−1 nodos y, finalmente, el nodo n
deben estar conectados a n−1 nodos. Por tanto, se necesitan n(n−1) canales
físicos. Sin embargo, si cada enlace físico permite comunicación bidireccional
(modo duplex), se puede dividir el número de enlaces por 2. En otras
palabras, se puede decir que en una red en malla completamente conectada
se necesitan n (n−1)/2 enlaces físicos duplex. Para acomodar tantos enlaces,
cada dispositivo de la red debe tener n−1 puertos de entrada/salida (E/s)
(para poder estar conectadas a las restantes n−1 estaciones.
Figura 5. Topología malla
Fuente: Añez, Fuenmayor, Ochoa (2017)
42
2.3.2. TIPOS DE REDES
Según Forouzan (2007, p. 13), en su libro define tres tipos de redes que
definiremos a continuación:
2.3.2.1. REDES DE ÁREA LOCAL (LAN)
Una red de área local (LAN, Local Area Network) suele ser una red de
propiedad privada y conectar enlaces de una única oficina, edificio o campus.
Dependiendo de las necesidades de la organización donde se instale y del
tipo de tecnología utilizada, una LAN puede ser tan sencilla como dos PC y
una impresora situadas en la oficina de la casa de alguien; o se puede
extender por toda una empresa e incluir periféricos de voz, sonido y vídeo.
Actualmente, el tamaño de las LAN está limitado a unos pocos kilómetros.
Las LAN están diseñadas para permitir compartir recursos entre
computadoras personales o estaciones de trabajo. Los recursos a compartir
pueden incluir hardware, software o datos. Un ejemplo frecuente de LAN,
que se encuentra en muchos entornos de negocios, enlaza un grupo de
trabajo de computadoras relacionadas con una cierta tarea, como, por
ejemplo, estaciones de trabajo de ingeniería o PC de contabilidad. Una de
las computadoras puede tener un disco de gran capacidad y convertirse en
servidora de los otros clientes.
El software se puede almacenar en este servidor central para que sea
usado por todo el grupo según las necesidades de cada miembro. En este

43
ejemplo, el tamaño de la LAN puede estar determinado por restricciones en
el número de licencias, por el número de usuarios, por copia de software o
por restricciones en el número de usuarios con licencia para acceder al
sistema operativo. Además del tamaño, las LAN se distinguen de otros tipos
de redes por su medio de transmisión y su topología. En general, una LAN
determinada usará un único medio de transmisión. Las topologías más
frecuentes de las LAN son el bus, el anillo y la estrella.
Figura 6. Red LAN
Fuente: Añez, Fuenmayor, Ochoa (2017)
2.3.2.2. REDES DE ÁREA METROPOLITANA (MAN)
La red de área metropolitana (MAN, Metropolitan Area Network) tiene
un tamaño intermedio entre una LAN y una WAN. Normalmente cubre el área
de una ciudad. Está diseñada para clientes que necesitan una conectividad
de alta velocidad, normalmente a Internet, y tiene puntos de conexión

44
extendidos por la ciudad o parte de ella. Un buen ejemplo de MAN es la parte
de red de una compañía telefónica que puede producir una línea DSL a los
clientes. Otro ejemplo es la red de TV por cable, diseñada originalmente para
la TV por cable, pero usada actualmente para proporcionar conexiones de
alta velocidad a Internet.
Figura 7. Red MAN
Fuente: Añez, Fuenmayor, Ochoa (2017)
2.3.2.3. REDES DE ÁREA EXTENDIDA (WAN)
Una red de área amplia (WAN, Wide Área Network) proporciona un
medio de transmisión a larga distancia de datos, voz, imágenes e
información de vídeo sobre grandes áreas geográficas que pueden
extenderse a un país, un continente o incluso al mundo entero.
Una WAN puede ser tan compleja como las troncales que conectan
Internet o tan simple como la línea telefónica que conecta una computadora
casera a Internet. Normalmente se denomina a la primera WAN conmutada y

45
a la segunda WAN punto a punto. La WAN conmutada conecta los sistemas
terminales, que habitualmente incluyen un enrutador (dispositivo de conexión
entre redes) que conecta a otra LAN o WAN. la WAN punto a punto es
normalmente una línea alquilada a un proveedor de telefonía o TV por cable
que conecta una computadora casera a una LAN pequeña o a un proveedor
de servicios de Internet (ISP, Internet Service Provider). Este tipo de WAN se
usa a menudo para proporcionar acceso a Internet.
Figura 8. Red WAN
Fuente: Añez, Fuenmayor, Ochoa (2017)
2.3.2 PROTOCOLOCO DE REDES
El autor Forouzan (2007, p.18) menciona que en las redes de
computadoras, la comunicación se lleva a cabo entre distintas entidades de
diferentes sistemas. Una entidad es cualquier cosa capaz de enviar o recibir
información. Pero no basta con que dos entidades se envíen secuencias de

46
bits entre sí para que se entiendan. Para que exista comunicación, las
entidades deben estar de acuerdo en un protocolo. Un protocolo es un
conjunto de reglas que gobiernan la comunicación de datos. Un protocolo
define qué se comunica, cómo se comunica y cuándo se comunica. Los
elementos clave de un protocolo son su sintaxis, su semántica y su
temporización.
Sintaxis
La sintaxis se refiere a la estructura del formato de los datos, es decir,
el orden en el cual se presentan. Por ejemplo, un protocolo sencillo podría
esperar que los primeros ocho bits de datos fueran la dirección del emisor,
los segundos ocho bits, la dirección del receptor y el resto del flujo fuera el
mensaje en sí mismo.
Semántica
La palabra semántica se refiere al significado de cada sección de bits.
¿Cómo se interpreta un determinado patrón y qué acción se toma basada en
dicha representación? Por ejemplo, ¿una dirección identifica la ruta a tomar o
el destino final del mensaje?
Temporización
La temporización define dos características: cuándo se deberían enviar
los datos y con qué rapidez deberían ser enviados. Por ejemplo, si un emisor
produce datos a una velocidad de 100 Mbps, pero el receptor puede
procesar datos solamente a 1 Mbps, la transmisión sobrecargará al receptor

47
y se perderá gran cantidad de datos.
2.3.4. MODELOS DE REDES
2.3.4.1. MODELO DE REFERENCIA OSI
El artículo 103884 del año 2013, por la compañía Microsoft definen al
modelo OSI de la siguiente manera:
El modelo de interconexión de sistemas abiertos (OSI) tiene siete
capas. Este artículo las describe y explica sus funciones, empezando por la
más baja en la jerarquía (la física) y siguiendo hacia la más alta (la
aplicación). Las capas se apilan de esta forma:
La capa física, la más baja del modelo OSI, se encarga de la
transmisión y recepción de una secuencia no estructurada de bits sin
procesar a través de un medio físico. Describe las interfaces eléctrica/óptica,
mecánica y funcional al medio físico, y lleva las señales hacia el resto de
capas superiores.
La capa de vínculo de datos ofrece una transferencia sin errores de
tramas de datos desde un nodo a otro a través de la capa física, permitiendo
a las capas por encima asumir virtualmente la transmisión sin errores a
través del vínculo.
La capa de red controla el funcionamiento de la subred, decidiendo qué
ruta de acceso física deberían tomar los datos en función de las condiciones
de la red, la prioridad de servicio y otros factores.
La capa de transporte garantiza que los mensajes se entregan sin

48
errores, en secuencia y sin pérdidas o duplicaciones. Libera a los protocolos
de capas superiores de cualquier cuestión relacionada con la transferencia
de datos entre ellos y sus pares.
El tamaño y la complejidad de un protocolo de transporte dependen del
tipo de servicio que pueda obtener de la capa de transporte. Para tener una
capa de transporte confiable con una capacidad de circuito virtual, se
requiere una mínima capa de transporte. Si la capa de red no es confiable o
solo admite datagramas, el protocolo de transporte debería incluir detección
y recuperación de errores extensivos.
La capa de sesión permite el establecimiento de sesiones entre
procesos que se ejecutan en diferentes estaciones.
La capa de presentación da formato a los datos que deberán
presentarse en la capa de aplicación. Se puede decir que es el traductor de
la red. Esta capa puede traducir datos de un formato utilizado por la capa de
la aplicación a un formato común en la estación emisora y, a continuación,
traducir el formato común a un formato conocido por la capa de la aplicación
en la estación receptora.
La capa de aplicación actúa como ventana para los usuarios y los
procesos de aplicaciones para tener acceso a servicios de red.
2.3.4.2. MODELO DE REFERENCIA TCP/IP
Según Forouzan (2010, p.93) Las siglas TCP/IP se refieren a un
conjunto de protocolos para comunicaciones de datos. Este conjunto toma su

49
nombre de dos de sus protocolos más importantes, el protocolo TCP
(Transmission Control Protocol) y el protocolo IP (Internet Protocol). La
evolución del protocolo TCP/IP siempre ha estado muy ligada a la de
Internet.
En 1969 la agencia de proyectos de investigación avanzada, ARPA
(Advanced Research Projects Agency) desarrolló un proyecto experimental
de red conmutada de paquetes al que denominó ARPAnet. ARPAnet
comenzó a ser operativa en 1975, pasando entonces a ser administrada por
el ejército de los EEUU. En estas circunstancias se desarrolla el primer
conjunto básico de protocolos TCP/IP.
Posteriormente, y ya entrados en la década de los ochenta, todos los
equipos militares conectados a la red adoptan el protocolo TCP/IP y se
comienza a implementar también en los sistemas Unix. Poco a poco
ARPAnet deja de tener un uso exclusivamente militar, y se permite que
centros de investigación, universidades y empresas se conecten a esta red.
Se habla cada vez con más fuerza de Internet y en 1990 ARPAnet deja de
existir oficialmente. En los años sucesivos y hasta nuestros días las redes
troncales y los nodos de interconexión han aumentado de forma imparable.
La red Internet parece expandirse sin límite, aunque manteniendo
siempre una constante: el protocolo TCP/IP. En efecto, el gran crecimiento
de Internet ha logrado que el protocolo TCP/IP sea el estándar en todo tipo
de aplicaciones telemáticas, incluidas las redes locales y corporativas. Y es
precisamente en este ámbito, conocido como Intranet, donde TCP/IP

50
adquiere cada día un mayor protagonismo. La popularidad del protocolo
TCP/IP no se debe tanto a Internet como a una serie de características que
responden a las necesidades actuales de transmisión de datos en todo el
mundo, entre las cuales destacan las siguientes:
Los estándares del protocolo TCP/IP son abiertos y ampliamente
soportados por todo tipo de sistemas, es decir, se puede disponer libremente
de ellos y son desarrollados independientemente del hardware de los
ordenadores o de los sistemas operativos.
TCP/IP funciona prácticamente sobre cualquier tipo de medio, no
importa si es una red Ethernet, una conexión ADSL o una fibra óptica.
TCP/IP emplea un esquema de direccionamiento que asigna a cada
equipo conectado una dirección única en toda la red, aunque la red sea tan
extensa como Internet. La naturaleza abierta del conjunto de protocolos
TCP/IP requiere de estándares de referencia disponibles en documentos de
acceso público. Actualmente todos los estándares descritos para los
protocolos TCP/IP son publicados como RFC (Requests for Comments) que
detallan lo relacionado con la tecnología de la que se sirve Internet:
protocolos, recomendaciones, comunicaciones, etcétera.
2.4. IDENTIFICACIÓN POR RADIO FRECUENCIA (RFID)
Según Gidekel (2006, p. 137) la identificación por radiofrecuencia se
define como una tecnología portadora de datos que transmite información
mediante señales en la porción de radio frecuencia del espectro

51
electromagnético. Un sistema de identificación por radio frecuencia consiste
de una antena y un transmisor-receptor, que lee la radio frecuencia y
transmite información a un dispositivo de procesamiento, y un transportador,
o etiqueta, que es un circuito integrado que contiene los circuitos de radio
frecuencia y la información que será transmitida.
Según Portillo (2008, p. 32) RFID (Identificación por Radiofrecuencia)
es un método de almacenamiento y recuperación remota de datos, basado
en el empleo de etiquetas o “tags” en las que reside la información. RFID se
basa en un concepto similar al del sistema de código de barras; la principal
diferencia entre ambos reside en que el segundo utiliza señales ópticas para
transmitir los datos entre la etiqueta y el lector, y RFID, en cambio, emplea
señales de radiofrecuencia (en diferentes bandas dependiendo del tipo de
sistema, típicamente 125 KHz, 13,56 MHz, 433-860-960 MHz y 2,45 GHz).
2.4.1. DESCRIPCIÓN Y COMPONENTES
Según Gidekel (2006, p. 36) establece que una etiqueta RFID es un
microchip adherido a una antena que envía datos a un lector RFID. La
etiqueta RFID contiene un número seriado único, y también puede contener
datos adicionales. La etiqueta RFID puede ser activa, pasiva o semi-pasiva.
Del mismo modo, Gidekel (2006, p. 23) establece que el lector RFID
utiliza su antena para enviar información digital codificada a través de ondas
de radiofrecuencia. Un circuito receptor en la etiqueta es capaz de detectar el
campo modulado, decodificar la información y usar su propia antena para

52
enviar una señal más débil a modo de respuesta.
Según Portillo (2008, p. 32) todo sistema RFID se compone
principalmente de cuatro componentes:
(A) Una etiqueta RFID, también llamada tag o transpondedor
(transmisor y receptor). La etiqueta se inserta o adhiere en un objeto, animal
o persona, portando información sobre el mismo. En este contexto, la palabra
“objeto” se utiliza en su más amplio sentido: puede ser un vehículo, una
tarjeta, una llave, un paquete, un producto, una planta, etc.
Consta de un microchip que almacena los datos y una pequeña antena
que habilita la comunicación por radiofrecuencia con el lector.
(B) Un lector o interrogador, encargado de transmitir la energía
suficiente a la etiqueta y de leer los datos que ésta le envíe. Consta de un
módulo de radiofrecuencia (transmisor y receptor), una unidad de control y
una antena para interrogar los tags vía radiofrecuencia.
Los lectores están equipados con interfaces estándar de comunicación
que permiten enviar los datos recibidos de la etiqueta a un subsistema de
procesamiento de datos, como puede ser un ordenador personal o una base
de datos.
Algunos lectores llevan integrado un programador que añade a su
capacidad de lectura, la habilidad para escribir información en las etiquetas.
(C) Un ordenador, host o controlador, que desarrolla la aplicación RFID.
Recibe la información de uno o varios lectores y se la comunica al sistema de

53
información. También es capaz de transmitir órdenes al lector.
(D) Adicionalmente, un middleware y en backend un sistema ERP de
gestión de sistemas IT son necesarios para recoger, filtrar y manejar los
datos.
2.4.2. PRINCIPIOS DE FUNCIONAMIENTOS
Según Gidekel (2006, p. 7) un sistema RFID está constituido por cuatro
componentes principales: tags, lectores, antenas y un host (computadora
central). Un tag RFID está compuesto por un microchip y una antena flexible
instalada sobre una superficie plástica. El lector es utilizado para leer y
escribir información en el tag, (actualmente, el formato más común para tags
es una etiqueta adhesiva de identificación).
Para obtener una respuesta de una etiqueta RFID, el lector emite una
onda de radio, cuando el tag se encuentra dentro del rango del lector, le
responde identificándose a sí mismo. Las etiquetas pueden leerse a distancia
sin contacto físico o línea de vista con el lector. La distancia dentro de la cual
un lector puede comunicarse entre lectores y etiquetas se llama rango de
lectura. Las comunicaciones entre lectores y etiquetas están gobernadas por
protocolos y estándares emergentes, como el estándar de la generación 2 de
UHF para su aplicación en la cadena de abastecimiento.
De igual manera, Portillo (2008 p. 34) define que existe una gran
diversidad de sistemas RFID, los cuales pueden satisfacer un amplio abanico

54
de aplicaciones para los que pueden ser utilizados. Sin embargo, a pesar de
que los aspectos tecnológicos pueden variar, todos se basan en el mismo
principio de funcionamiento, que se describe a continuación:
(A) Se equipa a todos los objetos a identificar, controlar o seguir, con
una etiqueta RFID.
(B) La antena del lector o interrogador emite un campo de
radiofrecuencia que activa las etiquetas.
(C) Cuando una etiqueta ingresa en dicho campo utiliza la energía y la
referencia temporal recibidas para realizar la transmisión de los datos
almacenados en su memoria. En el caso de etiquetas activas la energía
necesaria para la transmisión proviene de la batería de la propia etiqueta.
(D) El lector recibe los datos y los envía al ordenador de control para su
procesamiento.
2.4.3. COMPONENTES DEL HARDWARE
2.4.3.1. LECTOR RFID
Según Gidekel (2006 p. 23) el lector utiliza su antena para enviar
información digital codificada a través de ondas de radiofrecuencia. Un
circuito receptor en la etiqueta es capaz de detectar el campo modulación,
decodificar la información y usar su propia antena para enviar una señal más
débil a modo de respuesta.
Los lectores RFID de Symbol Technologies se encuentran disponibles
para realizar lecturas móviles con un operador, montados en unos autos

55
elevadores o instalados en forma fija. En un centro de distribución típico, uno
o más lectores con un par de antenas serian configurados en los docks de
carga y descarga para identificar el paso de tags entre ellos. Tal
configuración es denominada “portátil”. Los portales están localizados en las
puertas de recepción de mercadería, en las líneas de producción y empaque
y en las puertas de despacho de producto terminado.
Los lectores portátiles o de auto elevadores pueden ser utilizados para
leer etiquetas que no son despachadas a través del portal o para localizar
productos en el centro de distribución.
Debido a que una gran cantidad de etiquetas podrían encontrarse en
presencia de un lector, los lectores deben ser capaces de recibir y
administrar varias respuestas al mismo tiempo (potencialmente cientos por
segundo). La capacidad de gestionar una gran cantidad de etiquetas es
utilizada para permitir que las etiquetas sean utilizadas y seleccionadas
individualmente.
El lector puede instruir algunos tags para que se enciendan y otros para
que se apaguen con el objetivos de suprimir las interferencias. Una vez que
el tag es seleccionado, el lector está habilitado para realizar un número de
operaciones tales como leer su número leer su número de identificación o
escribir información en la etiqueta, dependiendo de la aplicación. Luego el
lector procede, a través de una lista, a reunir información de todas las
etiquetas.
En el mismo orden de ideas, Portillo (2008, p. 47) Un lector o

56
interrogador es el dispositivo que proporciona energía a las etiquetas, lee los
datos que le llegan de vuelta y los envía al sistema de información.
Asimismo, también gestiona la secuencia de comunicaciones con el lector.
Con el fin de cumplir tales funciones, está equipado con un módulo de
radiofrecuencia (transmisor y receptor), una unidad de control y una antena.
Además, el lector incorpora un interfaz a un PC, host o controlador, a través
de un enlace local o remoto: RS232, RS485, Ethernet, WLAN (RF, WiFi,
Bluetooth, etc.), que permite enviar los datos del transpondedor al sistema de
información.
El lector puede actuar de tres modos:
(A) Interrogando su zona de cobertura continuamente, si se espera la
presencia de múltiples etiquetas pasando de forma continua.
(B) Interrogando periódicamente, para detectar nuevas presencias de
etiquetas.
(C) Interrogando de forma puntual, por ejemplo cuando un sensor
detecte la presencia de una nueva etiqueta.
2.4.3.2. ETIQUETA RFID
Según los autores Fuentealba y Vicioso (2011; citado por Sánchez y
Valladares 2012, p. 38) exponen que la etiqueta RFID es parecida a la de los
códigos de barra, pero con la gran diferencia de que contienen una antena
con un microchip, en el que se puede almacenar y editar información sin
necesidad de hacer contacto, a través de las ondas de radio que llegan y

57
salen por la antena antes mencionada.
Con la modulación ASK la impedancia del chip se sitúa en dos estados;
el primero conectado directamente con la antena, y el segundo,
desconectado completamente de ella. Esta etiqueta se adhiere al producto
en cuestión, y para extraer su información es necesario que reaccione ante
las radiaciones electromagnéticas emitida por los lectores RFID.
Cabe destacar que existe diferentes diseños de las etiqueta, cada uno
especial para el tipo de superficie del objeto al que se quiera adherir, lo cual
sugiere que si se coloca una etiqueta diseñada especialmente para una
superficie en particular, en otra cuya características no sean parecidas a
dicha superficie, la lectura puede variar erróneamente, con la cual se podría
generar información falsa, por otro lado, tienen a su favor una gran ventaja, y
es que son más duraderas que las del código de barra, pesto que no
necesita mantenimiento, y puede resistir el frio, calor, agua en grandes
cantidades y/o humedad.
Asimismo, Hunt, Puglia (2007; citado en Alvarado 2008, p. 14) el tag,
etiqueta o transponder de RFID consiste en un pequeño circuito, integrado
con una pequeña antena, capaz de transmitir un número de serie único hacia
un dispositivo de lectura, como respuesta a una petición. Algunas veces
puede incluir una batería.

58
2.4.4. COMPONENTES SOFTWARE
2.4.4.1. RFID SYSTEM SOFTWARE
Según García (2006; citado por Salazar y Maestre 2011, p. 14) define
que es un conjunto de señales de radio con un hardware RFID, firmware y
otro software de sistema RFID es una colección de operaciones necesarias
para permitir la interacción básica entre el dispositivo lector y el tag.
Básicamente, la comunicación se realiza a nivel de procesamiento de
señales radio. Se necesita hardware RF, software de muy bajo nivel
(firmware), y un sistema software de alto nivel para gestionar el flujo de datos
que se intercambian entre el dispositivo lector y el tag. A continuación se
destacan las operaciones básicas requeridas a nivel de comunicación tag-
reader.
2.4.4.2 LECTURA/ESCRITURA
Esta sección se refiere a la capacidad de grabar y accesar a la memoria
de la etiqueta RFID.
En cuanto, Urueña (2009, p. 28) expone que la etiqueta accede a su
memoria para enviarle al lector la información que este solicita, a través de
una operación de lectura o escritura de datos sobre ella, o a través de la
aplicación cliente (la cual solo se permite si la etiqueta puede ser reescrita.
Según Bhuptani y Moradpour (2005; citado por Pineda y Gragirena
2008, p. 34) estas son las funciones más básicas. Un lector le pregunta a

59
una etiqueta para leer o escribir datos, accediendo a su memoria y a la
información, para luego trasmitirlos de regreso. En algunas también es
posible escribir información enviada por el lector.
2.4.4.3 ANTICOLISION, DETECCIO Y CORRECCION DE ERRORES
Según Fuentealba y Vicioso (2011, p. 14) explican que la anticolisión se
refiere a la interacción entre el lector y las distintas tarjetas que están
ubicadas en su rango de cobertura, de tal manera que se minimice el riesgo
de cometer errores si varias de ellas responden simultáneamente. Si esto
sucediera, se detecta el error y se corrige a través del software destinado a
ello, que este instalado tanto en las etiquetas como en los lectores RFID. En
las primeras este código funciona a través de una combinación de
aproximaciones probabilísticas y determinísticas, mientras que en el
segundo, lo ideal es que se asignen frecuencias en el tiempo a un conjunto
de lectores, ya sea con un enfoque centralizado o distribuido.
Según Bhuptani y Moradpour (2005; citado por Pineda y Gragirena
2008, p. 34) es cuando en algún momento dado múltiples etiquetas están
presentes en el campo de visión de un lector y deben ser identificadas
simultáneamente. La función de anti-colisión requiere de la cooperación
entre las etiquetas y los lectores, para minimizar el riesgo de que todas
respondan a la vez. En algunos casos, el algoritmo puede ser tan simple
como colocar un tiempo aleatorio para que cada etiqueta responda a una
petición.

60
Según Bhuptani y Moradpour (2005; citado por Pineda y Gragirena
2008, p. 35) la detección y corrección de errores es por medio de un lector
que puede emplear software sofisticado para detectar y corregir errores de
trasmisión de una etiqueta además se pueden incluir programas que
detecten y descarten datos duplicados o incompletos.
2.4.4.4 RFID MIDDLEWARE
Según los autores Fuentealba y Vicioso (2011; citado por Sánchez y
Valladares 2012, p. 43) se encarga del monitoreo, procesamiento, filtraje,
modificación y enrutamiento de toda la información captada por los lectores,
así como también de las modificaciones necesarias que particularizan el uso
de cada sistema RFID. Con esto garantiza la centralización de la información
en lugares donde se encuentra más de un lector, de tal manera que, si
alguno sufre alguna falla, se alerte al operador central.
Normalmente, los elementos de un sistema RFID forma un sistema
aislado, sino que se conectan a sistemas de producción lógica, etc. En esta
fase entra el middeware, dispositivo entre el hardware RFID y las
aplicaciones software del cliente, tal como sistemas de gestión de inventario,
ERPs, CRMs, etc. Su función es la de gestionar todo el sistema RFID a nivel
de hardware, recibir la totalidad de la señales de los tag y filtrar la
información, para solo trasmitir información útil a los sistemas empresariales.
El middleware también puede ser un software diseñado expresamente
para una aplicación concretada, que lo único que haga es trasmitir la
información recogida por los lectores a la aplicación correspondiente.
61
Según Bhuptani y Moradpour (2005; citado por pineda y Gragirena
2008, p. 35) consiste en un grupo de dispositivos que actúan como un puente
entre los componentes del sistema RFID y el software de aplicación.
Realizada dos funciones principales: supervisar el estatus de los dispositivos
y gestionar la infraestructura de RFID.
Estas funciones están relacionadas y comúnmente comparten datos.
No obstante deben cumplir requerimientos de aplicaciones diferentes. Hay
que hacer notar que muchos de los distribuidores de RFID middleware
ofrecen estas dos funciones en u solo paquete.
La gestión consiste en la codificación recolección, procesamiento,
filtrado agregación de los datos transmitidos entre el lector y las etiquetas
para integrarlo a aplicación de host. Esta función es importante en casos
donde los lectores están en la capacidad de recibir grandes ráfagas o
constantes flujos de datos de las etiquetas o cuando requieren ser
autorizadas para evitar información duplicada.
2.4.5 CLASIFICACIÓN DE LOS SISTEMAS RFID
Los sistemas RFID, según lo consultado por diversos autores se
clasifican según la frecuencia en la que opera el sistema, el tipo de etiqueta y
según el tipo de comunicación entre el lector y la etiqueta. A continuación,
presentamos más detallada mente cada una de estas clasificaciones.

62
2.4.5.1 CLASIFICACIÓN POR LA FRECUENCIA DE OPERACIÓN
Según Ureña (2009, p. 45) explica que se da principalmente mediante 3
bandas LF, HF y UHF también explica que existen distintos sistemas de
RFID que operan a distintas frecuencias y cada sistema de RFID presenta
sus ventajas y desventajas en relación a los otros.
FRECUENCIA BAJA O LF
Opera en una frecuencia alrededor de 125kHz, es el sistema menos
susceptible a los líquidos y metales, su velocidad de comunicación es baja, lo
que lo hace deficiente para operar en entornos donde exista más de un tag
presente en el campo de la antena; Su rango máximo de lectura no supera
los 50 cms y su utilización más frecuente está asociada a controles de
accesos e identificación de animales.
FRECUENCIA ALTA O HF
Opera en una frecuencia cercana a los 13.56 MHz su respuesta en
presencia de líquidos es buena, la velocidad de comunicación es aceptable
para sistemas estáticos o de baja velocidad, su rango máximo de lectura es
de alrededor un metro, sus principales aplicaciones se encuentran en
librerías, identificación de contenedores y ‘smartcard’.
UHF FRECUENCIA ULTRA ALTA
Opera entre los 868 – 928 MHz, sus principales inconvenientes se
encuentran en la interferencia provocada por metales y líquidos. Otro punto

63
negativo es la imposibilidad de estandarizar la frecuencia, dado que cada
país legisla esta banda con distintas limitaciones.
Entre sus puntos positivos está el rango de lectura (1200 Tag/seg.) y el
bajo costo de los tag, 2.4- 5.8 GHz trabaja en la banda de UHF, si bien su
velocidad de transmisión es buena, su rango de lectura no es mayor a 2
metros. Este tipo de sistemas no se encuentran muy difundidos y su
aplicación principal se encuentra en sistemas de tele-peaje.
Según el manual técnico de aplicaciones Weinstein (2005, citado por
Alvarado en el 2008, p. 18) expone que las frecuencias de RFID pueden ser
divididas en 4 rangos:
BAJA FRECUENCIA
(9-135 KHz) los sistemas que utilizan este rango de frecuencia tienen la
ventaja de una distancia de lectura de solo unos cuantos centímetros. Solo
pueden leer un elemento a la vez.
ALTA FRECUENCIA
(13.56 MHz) esta frecuencia es muy popular y cubre distancias de 1 cm
a 1.5 m. Típicamente las etiquetas que trabajan en esta frecuencia son de
tipo pasivo.
ULTRA HIGH FRECUENCY
(0.3-1.2GHz) este rango se utiliza para tener una mayor distancia entre
la etiqueta y el lector (de hasta 4 metros dependiendo del fabricante y del
ambiente). Estas frecuencias no pueden penetrar el metal ni los líquidos a
64
diferencia de las bajas frecuencias, pero pueden transmitir a mayor velocidad
y por lo tanto son buenos para leer más de una etiqueta a la vez.
MICROONDAS
(2.45-5.8GHz) la ventaja de utilizar un intervalo tan amplio de
frecuencias es su resistencia a los fuertes campos electromagnéticos,
producidos por motores eléctricos, por lo tanto, estos sistemas son utilizados
en líneas de producción de automóviles. Sin embargo, estas etiquetas
requieren de mayor potencia y son más costosas, pero es posible lograr
lecturas a distancia de hasta 6 metros. En virtud de lo anteriormente descrito,
dependiendo de la frecuencia de operación, las etiquetas se pueden
clasificar en baja, alta y ultra alta frecuencia y microondas.
La frecuencia de operación determina aspectos de la etiqueta como la
capacidad de transmisión de datos, la velocidad y tiempo de lectura de éstos,
el radio de cobertura y el costo de la etiqueta.
2.4.5.2 CLASIFICACIÓN POR EL TIPO DE ETIQUETA
Según lo expuesto por Blázquez (2010, p.2). Las etiquetas RFID
pasivas generalmente operan en una frecuencia de 124, 125 o 135 KHz.,
aunque hay sistemas que pueden llegar a operar en 2.45 GHz. La forma de
la etiqueta dependerá del uso que se vaya a hacer de las mismas, aunque lo
normal es que vaya montada sobre una pegatina o una tarjeta.
El autor Blázquez (2010, p.2). Explica que las etiquetas RFID semi-
pasivas son similares a las etiquetas RFID pasivas. Están diseñadas de tal

65
forma que sea más compacta y práctica con una pequeña batería integrada
que permite que su circuito integrado se encuentre siempre alimentado y las
antenas son más eficaces al momento de emitir una respuesta.
En cuanto a la etiqueta RFID activa el autor Blázquez (2010, p.3).
Explica que este tipo de etiquetas lleva su propia fuente de alimentación y
tiene rangos mayores de uso, tanto a nivel de frecuencias, siendo las
normales de uso 455 Mhz, 2’45 o 5’8 Ghz., como las distancias a las que
pueden ser detectadas y leídas, 100 metros.
ETIQUETAS RFID PASIVAS
Las etiquetas RFID pasivas no llevan fuente de alimentación propia y
utilizan para responder la energía inducida en la antena por la señal de
escaneo de radiofrecuencia. Debido a esto la señal respuesta tiene un
tiempo de vida bastante corto y su radio de transmisión puede llegar a como
mucho 6 metros, pero tiene la ventaja de poder ser mucho más pequeñas
que las etiquetas activas. En el año pasado la etiqueta más pequeña
fabricada, en la imagen de la derecha, tenía unas dimensiones de 0’4 x 0’4
milímetros, siendo más fina que una hoja de papel.
ETIQUETAS RFID SEMI-PASIVAS
Este tipo de etiquetas es muy similar al anterior, pero con la diferencia
de que incluyen una pequeña batería que permite que el circuito integrado de
la etiqueta esté siempre alimentado. Esto da lugar a que las antenas no
requieran capturar la potencia de la señal entrante para devolver la señal

66
saliente, sino que las antenas son mejoradas para la emisión de la
respuesta.
ETIQUETAS RFID ACTIVAS
Su tamaño es lógicamente mayor que los otros dos tipos de etiquetas,
aunque no apenas supera el tamaño de una moneda. Además, portan una
pequeña memoria, debido a lo cual pueden almacenar un mayor número de
datos. Se puede usar como un transponedor o como una baliza. En el primer
caso puede ejemplificarse como un tele-peaje o bien otros puestos de control
en los que se requiera la apertura de puertas de seguridad. Su segundo uso
es utilizado para sistemas de localización en tiempo real. En este caso la
etiqueta está lanzando una señal cada cierto intervalo de tiempo, por ejemplo
3 segundos, hasta que el lector consiga identificar el lugar del que proviene
la señal.
2.4.5.3 CLASIFICACIÓN POR LA COMUNICACIÓN ENTRE LA
ETIQUETA Y EL LECTOR La comunicación de un sistema RFID, se basa en la comunicación
bidireccional entre un lector y una etiqueta, por medio de ondas de
radiofrecuencia. Se conoce que la comunicación entre las etiquetas y el
lector se realiza a través de la modulación (con portadoras, subportadoras o
armónicos de la frecuencia de transmisión) de las señales electromagnéticas
emitidas por el lector, las cuales son mucho más potentes que las enviadas

67
por las etiquetas. Esto sugiere que el lector debe saber diferenciar ambas
señales, y para ello está la siguiente clasificación:
HalfDuplex
En cuanto a la comunicación HalfDuplex, Fumai y Teriús, 2008(citado
por Fuentealba y Vicioso, 2001, p. 17) explican que la transferencia de
señales del lector a las etiquetas se alterna con la comunicación en sentido
contrario, utilizando las modulaciones con o sin subportadora y armónicos.
Full Duplex
La comunicación Full Duplex según Fumai y Teriús, 2008(citado por
Fuentealba y Vicioso, 2001, p. 18) se refiere a la transferencia de señales del
lector a las etiquetas se alterna con la comunicación en ambos sentidos
simultáneamente, utilizando la transferencia de datos a una fracción de
frecuencia del lector, en subarmónicos o en diferentes frecuencias (no
armónicas).
Secuenciales
La comunicación secuencial según los autores Fumai y Teriús, 2008
(citado por Fuentealba y Vicioso, 2001, p. 18), sucede cuando la etiqueta es
alimentada a través de pulsos generados por el lector, cuyos estados son
encendido y apagado en intervalos regulares; esto puede generar una
pérdida de energía en el momento en que la comunicación se corta si no se
posee una alimentación externa.

68
2.4.6. REGULARIZACIÓN Y ESTANDARIZACIÓN
Haciendo referencia a la tesis de García (2006; citado en Fuentealba y
vicioso, 2011, p. 50), “para esta tecnología no existe una regulación mundial,
sino que cada país tiene su propio organismo, bajo el cual fijan las
frecuencias y potencias a utilizar en su territorio, entre los cuales están:
Comisión Nacional de Telecomunicaciones — CONATEL
(Venezuela).
Federal Communications Commission — FCC (USA).
Department Of Communications — DOC (Canada).
Conference Européan administrations des Postes et des
Telecommunications - CEPT (Europa).
Ministry of Public Management, Home affairs, Post and
Telecommunication - PHPT (Japón).
Ministerio de la Industria de información (China).
Autoridad Australiana de la Comunicación (Australia).
Ministerio de desarrollo económico de Nueva Zelanda (Nueva
Zelanda).
En Venezuela, CONATEL es el organismo encargado de normar el uso
seguro del espectro radioeléctrico. Para el uso de la tecnología RFID, el
rango bajo el cual particulares, Estado y empresas pueden operar sus
sistemas, en la banda UHF, es entre 922 MHz y 928MHz.
69
Ahora bien, las 4 frecuencias de trabajo están en distintas bandas, y
fueron asignadas según el estándar ANS INCITS 256-2001 del instituto
Nacional de Estándares Americanos (ANSI), en un conjunto con el grupo
EPCGlobal y la organización Internacional para la Estandarización (ISO); de
esta unión se obtienen los siguientes resultados:
En la frecuencia LF (125-134 KHz y 140-148,5 KHz) y HF (13.56
MHz), se utiliza la banda ISM (Industrial – Scientific – Medical) por lo que no
necesitan licencia para operar.
En frecuencias UHF (868-928 MHz) se debe operar según el
estándar de la zona donde se quiera aplicar el sistema, debido a que en cada
país esta banda tiene diferentes usos y aplicaciones. Vale acotar que para
Norteamérica, Europa, Australia y Nueva Zelanda, se puede usar un rango
de frecuencias sin licencia (908-928 MHz para el primero; 865,6 MHz para el
segundo; y 918-928 MHz para los dos últimos) pero con un máximo de
potencia de transmisión de hasta 2W en alguno de ellos. Adicionalmente,
Venezuela cuenta con un rango UHF comprendido entre 900 y 928 MHz”.
2.4.6.1 INTERNATIONAL ORGANIZATION FOR STANDARDIZATION
(ISO)
Según Sánchez, Valladares (2012, p.52) Sobre la base de las
consideraciones de Libera Network (2010), consideramos La International
Organization for Standardization (“Organización Internacional de
Normalización”) (ISO) como el organismo líder mundial en materia de

70
desarrollo de normas internacionales. En tal sentido, las normas técnicas ISO
especifican los requisitos para productos, servicios, procesos, materiales y
sistemas.
Asimismo, ISO ha desarrollado normas destinadas a la evaluación de
conformidad, así como prácticas gerenciales y societarias sobre diferentes
bienes. ISO ha publicado las normas técnicas fundamentales que se aplican
en RFID. Una vez desarrolladas, estas normas se diseñan para su utilización
en todo el mundo.
3. SISTEMA DE VARIABLES
3.1. DEFINICIÓN NOMINAL
El sistema de variables está integrado por:
Sistema de posicionamiento vehicular
Tecnología RFID
3.2. DEFINICIÓN CONCEPTUAL
SISTEMA DE POSICIONAMIENTO GLOBAL
GPS es un sistema que tiene como objetivo la determinación de las
coordenadas espaciales de puntos respecto de un sistema de referencia
mundial. Los puntos pueden estar ubicados en cualquier lugar del planeta,
pueden permanecer estáticos o en movimiento y las observaciones pueden
realizarse en cualquier momento del día.

71
Para la obtención de coordenadas el sistema se basa en la
determinación simultánea de las distancias a cuatro satélites (como mínimo)
de coordenadas conocidas. Estas distancias se obtienen a partir de las
señales emitidas por los satélites, las que son recibidas por receptores
especialmente diseñados. Las coordenadas de los satélites son provistas al
receptor por el sistema (Huerta 2005, p. 12).
TECNOLOGIA RFID
La identificación por radiofrecuencia (Radio Frecuency Identification),
originada en los entornos militares (Gómez 2012, p.9) es una tecnología que
permite realizar la captura de datos de forma automática, ofrece la
posibilidad de localizar y monitorear bien sea personas, animales, objetos o
elementos a distancia de proximidad.
3.3. DEFINICIÓN OPERACIONAL
SISTEMA DE POSICIONAMIENTO GLOBAL
Es un sistema de navegación por satélite que abarca todo el globo
terráqueo que permite localizar con precisión una cualquiera persona, objeto
o vehículo que cuente dispositivo GPS en cualquier lugar del mundo, con una
gran precisión. La ubicación del dispositivo se da a conocer me diente
coordenadas y su precisión puede ser de metros o incluso hasta de
centímetros depende el tipo de sistema de posicionamiento global se esté
implementando, todo esto en intervalos de tiempos muy pequeños.

72
TECNOLOGIA RFID
Por sus siglas en inglés (Radio Frequency IDentification), en español
(identificación por radiofrecuencia) La tecnología RFID permite capturar y
almacenar información a través de la lectura de etiquetas que poseen
almacenada información para identificar un objeto, animal o persona, incluso
cuando éstas no se encuentran en una línea visual directa, tiene la
capacidad de identificar el elemento de forma precisa y segura, seguir su
ruta, es capaz hasta calcular distancias gracias a una etiqueta especial que
transmite ondas de radio. Todo esto de manera automática.